Identification and Control of Mechatronic Systems
|
|
|
- Delilah Benson
- 5 years ago
- Views:
Transcription
1 Identification and Control of Mechatronic Systems Philadelphia University, Jordan NATO - ASI Advanced All-Terrain Autonomous Systems Workshop August 15 24, 2010 Cesme-Izmir, Turkey
2 Overview Mechatronics Engineering System Identification Control Techniques Hardware-in-the-Loop (HIL) Design Procedure Case Studies 2





3 Philadelphia University, Jordan Philadelphia is the ancient name of Amman named by Ptolemaeus Philadelphus in the year 285 B.C 3
4 Definition: What is Mechatronics? Mechatronics Engineering is the Analysis Design Manufacturing Integration and maintenance of mechanics with electronics through intelligent computer control. 4
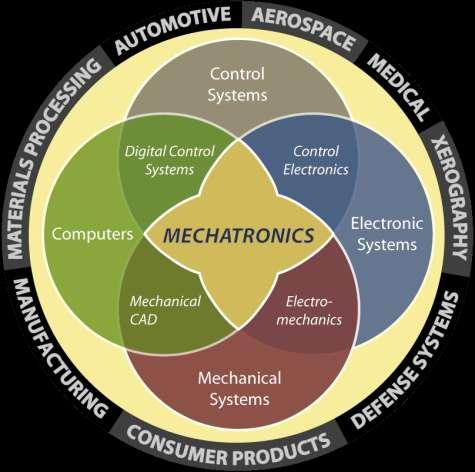
5 Mechatronics Main Components 5
6 Mechatronic System Overview Actuators Electrical Motors, Pneumatic, Hydraulic Mechanical system Sensors Inductive, Capacitive, Resistive, Ultrasonic, Photo Graphical display LED, LCD, CRT Conditioning & Interface Output: D/A, Power Circuit Input: A/D, Filter, Amplifier Control Architectures mcontroller, PLC, PC, DSP Control Algorithm 6
7 System Identification Tarek A. Tutunji

8 Modeling / Identification Communities Statistics Econometrics and Time Series Analysis Machine Learning Process Control Data Mining Artificial Neural Networks System Identification 8
9 Dynamic Models Classification SISO vs. MIMO Linear vs. nonlinear Parametric vs. nonparametric Time invariant vs. time variant Time domain vs. frequency domain Discrete vs. continuous Deterministic vs. stochastic 9
10 System Identification Mathematical models can be constructed using analytical approach, such as physics laws, or using experimental approach. System identification is the field of approximating dynamic system models from input/output patterns acquired through physical experiments. The target is to establish a mathematical model that mimics the original system and therefore minimizes the error between the system and model outputs. 10
11 Two Main Theories Realization Theory of how to realize linear state space models from impulse responses (Ho-Kalman 1966) Prediction-Error Prediction of the output at certain time depends previous measured input and output (Astrom-Bohlin 1965) 11
12 Deterministic Realization Theory State-space realization problem is stated as follows: Construct a minimal state-space realization x y t1 t Cx Ax t t Bu For the input-output model t y t k 1 H k u tk described by its impulse response matrices, H k 12
13 Deterministic Realization Theory The problem is to replace the infinite description H z k1 H k z k with a finite description so that H( z ) C 1 zi A B 13
14 Maximum Likelihood Theory Algorithmic derivation of ML identification for ARMA (Auto-Regressive Moving-Average) models. A( z )yt B( z )ut C( z ) e t ML notations such as cost criteria and parameter estimate V N 0. 5 t1 2 t ˆ min V 14
15 Maximum Likelihood to Prediction Error Maximization of the likelihood function is equivalent to minimizing the sum of the squared prediction errors. under the assumption of white Gaussian noise in the ARMAX model 15

16 Ljung, Stoica, and Soderstrom Major work: 1980 s Two independent concepts: The choice of a parametric model structure y t G z, u t H z, e t The choice of an identification criterion V N N N 1,Z f N t1 t 16
 systems Identifiability of closed-loop")
17 Breakthroughs: Multi-Input Multi-Output (MIMO) systems Identifiability of closed-loop systems 17
18 Identification as a Design Problem Identification can be viewed as an approximation Estimated models are used for a specific purpose The model error should be controlled in order not to penalize the goal for which the model was built for. Goal-oriented design problem 18


19 Identification for Control In 1990, identification and control design were looked as a combined design problem. 19
20 System Identification Steps 1. Experiment design. This includes the choice of lab equipment to be used such as computers, DAQ, and interface. 2. Model structure determination. The choice of the model can range from nonparametric models, such as transient and frequency analysis, to parametric methods, such as difference equations and neural networks. 3. Experiment run. This is usually done by exciting the system with an input signal (pulse, sinusoid, or random) and measuring the output signal over a specified time interval. 20
21 System Identification Steps 4. Algorithm choice and run. The algorithm used for convergence can vary from simple one-shot least squares, recursive least squares to advanced multistructures such as back propagation. 5. Validation of results. The output of the identified model is compared to the original system through different and new input signals. 21
22 System Identification Input Real System Actual Output System Model Model Output - + Error 22
23 23 System Identification: ARMA Models The standard Auto-Regressive Moving-Average model (ARMA) is given below m i i k i n j j k j k u b y a ŷ 0 1 where u k is the system input, y k is the system output ^y k is the predicted output, a and b are the ARMA parameters. The goal is to minimize the error between the desired and predicted outputs K k k k K k k y y e E ˆ min
24 System Identification: ARMA Models Coefficients updates using steepest descent E(k) a(j) y(k) ˆ y(k) y(k j) e(k)y(k j) a( j) a( j) y( k j) e( k) E(k) b(i) y(k) ˆ y(k) x(k i) e(k)u(k i) b(i ) b(i ) u( k i )e( k ) ARMA to Transfer Functions Zy(k) n j 1 a(j)y(k j) Z m i 0 b(i)u(k i) H(z) Y(z) U(z) b a 0 0 b 1 a 1 z z b... a M N z z m n 24
25 Control Techniques Tarek A. Tutunji


26 Control Techniques / Strategies Classical Control Adaptive Control Robust Control Optimal Control Variable Structure Control Intelligent Control 26


27 Classical Control Classical control design are used for SISO systems. Most popular concepts are: Bode plots Nyquist Stability Root locus. PID is widely used in feedback systems. 27
 K p e(t ) K I e(t )dt K D de(t")
28 Classical Control: PID Proportional-Integral-Derivative (PID) is the most commonly used controller for SISO systems u(t ) K p e(t ) K I e(t )dt K D de(t dt ) 28
29 Classical vs. Modern Control In contrast to the frequency domain analysis of the classical control theory, modern control theory utilizes the time-domain state space representation. A mathematical model of a physical system as a set of input, output and state variables related by first-order differential equations. The variables are expressed as vectors and the differential and algebraic equations are written in matrix form. The state space representation provides a convenient and compact way to model and analyze systems with multiple inputs and outputs. 29
30 Adaptive Control Adaptive control involves modifying the control law used by a controller to cope with the fact that the parameters of the system being controlled are slowly time-varying or uncertain. Such controllers use on-line identification of the process parameters. For example, as an aircraft flies, its mass will slowly decrease as a result of fuel consumption; we need a control law that adapts itself to such changing conditions. 30
31 Robust Control Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. Robust control methods are designed to function properly so long as uncertain parameters or disturbances are within some set. The state-space methods were sometimes found to lack robustness, prompting research to improve them. This was the start of the theory of Robust Control, which took shape in the 1980's and 1990's and is still active today. 31
32 Adaptive vs. Robust Control Adaptive control does not need a priori information about the bounds on uncertainties or time-varying parameters. Robust control guarantees that if the changes are within given bounds the control law need not be changed, while adaptive control is precisely concerned with control law changes. 32
33 Optimal Control Optimal control is a set of differential equations describing the paths of the state and control variables that minimize a cost function For example, the jet thrusts of a satellite needed to bring it to desired trajectory that consume the least amount of fuel. Two optimal control design methods have been widely used in industrial applications, as it has been shown they can guarantee closed-loop stability. Model Predictive Control (MPC) Linear-Quadratic-Gaussian control (LQG). 33
34 Variable Structure Control Variable structure control, or VSC, is a form of discontinuous nonlinear control. The method alters the dynamics of a nonlinear system by application of a high-frequency switching control. The main mode of VSC operation is sliding mode control (SMC). 34

35 Intelligent Control Intelligent Control is usually used when the mathematical model for the plant is unavailable or highly complex. The most two commonly used intelligent controllers are Artificial Neural Networks Fuzzy Logic 35
36 Intelligent Control: Fuzzy Fuzzy set theory provides mathematical tools for carrying out approximate reasoning processes when available information is uncertain, incomplete, imprecise, or vague. Fuzzy logic controllers manage complex control problems through heuristics (IF THEN) and mathematical models provided by fuzzy logic, rather than via mathematical models provided by differential equations. This is particularly useful for controlling systems whose mathematical models are nonlinear or for which standard mathematical models are simply not available 36
37 Fuzzy Control 37
38 Intelligent Control: ANN Artificial Neural networks (ANN) are nonlinear mathematical models that are used to mimic the biological neurons in the brain. ANN are used as black box models to map unknown functions ANN can be used for: Identification and Control 38
39 ANN: Single Neuron x 1 x 2 w 0 w 1 w M f(net) y x M M y f x m w m m1 39
40 ANN Architecture x 1 x 2 x M v ij 1 2 Q w jk 1 2 N z 1 z 2 z M E k 1 2 N n1 z n d n 40
41 ANN: System Identification In the identification process, the neural network is used to approximate the nonlinear function. The structure of the neural network plant model is given below, where the blocks labelled TDL are tapped delay lines that store previous values of the input and output signals. Plant Output Plant Input TDL TDL Weights Weights + Activation Weights + Function Activation Function Net Output First Layer Second Layer 41
42 ANN: Identification and Control Control Identification 42
43 ANN: Identification and Control 43
44 Hardware-in-the-Loop Tarek A. Tutunji Ashraf Saleem
45 Hardware-in-the-Loop (HIL) Classical Mechatronic systems are composed of controllers, actuators, and sensors. Some components can be substituted by its model and simulated in real time. The simulated components can be run in conjunction with real components under the same environment. This environment is regarded as HIL 45
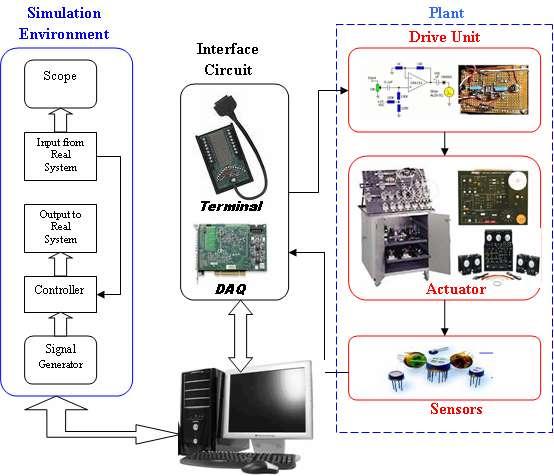
46 HIL 46


47 Three-Stage Design Procedure Tarek A. Tutunji Ashraf Saleem
48 Three-Stage Design Procedure Stage 1 online identification The system-under-test is identified online using ARMA models Stage 2 controller design Models are used in simulation runs to design the controller Stage 3 online control The designed controllers are tuned and applied to the systemunder-test in Hardware-In-The-Loop (HIL) environment 48
49 Three-Stage Design Procedure Start Connect PC/DAQ to the system Disconnect system Re-connect PC/DAQ to the system Apply Impulse and Measure Response Design Controller using software simulation Apply Computer as Controller Approximate Transfer Function using ARMA / RLS Tune and Optimize Controller Fine-Tune the Controller End 49
50 Stage 1: Online Identification PC / DAQ System Identification Simulink Impulse Drive Circuit Electro-mechanical system under test Sensor ARMA Model RLS Algorithm A/D System Response 50
51 Stage 2: Controller Design Computer Simulation (using Simulink/Matlab) Reference Error Controller Design Control Signal Identified Transfer Function Model Response 51
52 Stage 3: Online Control PC / DAQ Designed Controller Control Signal Drive Circuit Electro-mechanical system under test Sensor Simulink A/D System Response 52
53 Case Studies Tarek A. Tutunji Ashraf Saleem
54 Experimental Setup Computer P4, 3GHz desktop MATLAB / Simulink National Instruments DAQ card 6036E Sampling rate of 200 ks/s Input voltage range of ± 10 V Input signal to the system-under-test (PC output) was a voltage pulse. The system response is the output (PC input) 54
55 Experimental Setup 55

56 Case Study: Induction Motor 56
57 Induction Motors Due to their simple structure, reliability of operation and modest cost, the squirrel cage induction motors are the most widely used electrical drive motors. Induction motors exhibit nonlinear dynamic behavior and therefore it is a challenge to establish an adequate mathematical model for controller design purposes. The parameters of the induction motor may change during the operation of the drive system, causing deviations between the corresponding signals of the model and the motor. 57
58 Stage 1: Online Identification 58
59 Stage 1: Online Identification 6 th order model 22 nd order model 59
60 Stage 1: Online Identification 60
61 Testing of Open-loop Responses 61
62 Stage 2: Controller Design 62
63 Stage 2: Control Design 63
64 Stage 3: Online Control 64
65 Online Control 65
66 Stage 3: Online Control 66
67 Advantages of the Proposed Procedure Accuracy in the identification model. Flexibility in the controller design. Optimizing time resources and minimizing the cost The induction motor to be controlled will not be used during the experimentation of the controller design and parameter tuning and therefore the down time of the induction motor will be minimized. This might be a crucial time saving issue when the motor is used production line. Equally important, damage to the motor due to inappropriate parameter values is avoided. 67

68 Case Study: Pneumatic System 68
69 Pneumatic Systems Pneumatic servo-drives play an important role in industrial mechatronic systems. This is due to their cost effectiveness, easy maintenance, and clean operating conditions. However, pneumatic actuators are characterized by high order time variant dynamics, nonlinearities due to compressibility of air, internal and external disturbances and payload variation 69
70 Experiment Setup 70
71 System Identification 71
72 Displacement (cm) Online Control Real System Respnse with Kp=14, Ki=6, Kd=0.2 Steady State Error Real System Disp 4 3 Demand Position Time (ms) 72
73 Particle Swarm 73
74 Position Cascade Control Simulated Position Real Position Dr. Tarek Time(ms) A. Tutunji 74
75 Conclusions Identification and control play an essential role in the design of mechatronic systems System identification methods that use linear models, such as Auto-Regressive Moving-Average (ARMA), as well as nonlinear models, such as Artificial Neural Networks (ANN), were presented and compared. Control methods that range from PID to intelligent controllers, such as fuzzy controllers, were presented and compared. 75
76 Conclusions A three-stage procedure for the identification and control of mechatronic systems was presented. 1. The system-under-test is identified online using ARMA models. 2. These models are used in simulation runs to design the controller. 3. The designed controllers are applied to the system using HIL. Experimental results for two case studies were presented in order to demonstrate the advantages of the procedure. Finally, an UAV project that used a similar procedure was presented to illustrate the procedure s practicality. 76
Modeling and Control Overview
 Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Modeling and Control Overview D R. T A R E K A. T U T U N J I A D V A N C E D C O N T R O L S Y S T E M S M E C H A T R O N I C S E N G I N E E R I N G D E P A R T M E N T P H I L A D E L P H I A U N I
Overview of the Seminar Topic
 Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
Linear System Theory. Wonhee Kim Lecture 1. March 7, 2018
 Linear System Theory Wonhee Kim Lecture 1 March 7, 2018 1 / 22 Overview Course Information Prerequisites Course Outline What is Control Engineering? Examples of Control Systems Structure of Control Systems
Linear System Theory Wonhee Kim Lecture 1 March 7, 2018 1 / 22 Overview Course Information Prerequisites Course Outline What is Control Engineering? Examples of Control Systems Structure of Control Systems
CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER
 114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
Contents. PART I METHODS AND CONCEPTS 2. Transfer Function Approach Frequency Domain Representations... 42
 Contents Preface.............................................. xiii 1. Introduction......................................... 1 1.1 Continuous and Discrete Control Systems................. 4 1.2 Open-Loop
Contents Preface.............................................. xiii 1. Introduction......................................... 1 1.1 Continuous and Discrete Control Systems................. 4 1.2 Open-Loop
SAMPLE SOLUTION TO EXAM in MAS501 Control Systems 2 Autumn 2015
 FACULTY OF ENGINEERING AND SCIENCE SAMPLE SOLUTION TO EXAM in MAS501 Control Systems 2 Autumn 2015 Lecturer: Michael Ruderman Problem 1: Frequency-domain analysis and control design (15 pt) Given is a
FACULTY OF ENGINEERING AND SCIENCE SAMPLE SOLUTION TO EXAM in MAS501 Control Systems 2 Autumn 2015 Lecturer: Michael Ruderman Problem 1: Frequency-domain analysis and control design (15 pt) Given is a
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March Overview of dynamic control systems
 ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
Introduction to System Identification and Adaptive Control
 Introduction to System Identification and Adaptive Control A. Khaki Sedigh Control Systems Group Faculty of Electrical and Computer Engineering K. N. Toosi University of Technology May 2009 Introduction
Introduction to System Identification and Adaptive Control A. Khaki Sedigh Control Systems Group Faculty of Electrical and Computer Engineering K. N. Toosi University of Technology May 2009 Introduction
D(s) G(s) A control system design definition
 G(s) A control system design definition") R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
Introduction to System Modeling and Control. Introduction Basic Definitions Different Model Types System Identification Neural Network Modeling
 Introduction to System Modeling and Control Introduction Basic Definitions Different Model Types System Identification Neural Network Modeling What is Mathematical Model? A set of mathematical equations
Introduction to System Modeling and Control Introduction Basic Definitions Different Model Types System Identification Neural Network Modeling What is Mathematical Model? A set of mathematical equations
CBE495 LECTURE IV MODEL PREDICTIVE CONTROL
 What is Model Predictive Control (MPC)? CBE495 LECTURE IV MODEL PREDICTIVE CONTROL Professor Dae Ryook Yang Fall 2013 Dept. of Chemical and Biological Engineering Korea University * Some parts are from
What is Model Predictive Control (MPC)? CBE495 LECTURE IV MODEL PREDICTIVE CONTROL Professor Dae Ryook Yang Fall 2013 Dept. of Chemical and Biological Engineering Korea University * Some parts are from
CHAPTER 7 MODELING AND CONTROL OF SPHERICAL TANK LEVEL PROCESS 7.1 INTRODUCTION
 141 CHAPTER 7 MODELING AND CONTROL OF SPHERICAL TANK LEVEL PROCESS 7.1 INTRODUCTION In most of the industrial processes like a water treatment plant, paper making industries, petrochemical industries,
141 CHAPTER 7 MODELING AND CONTROL OF SPHERICAL TANK LEVEL PROCESS 7.1 INTRODUCTION In most of the industrial processes like a water treatment plant, paper making industries, petrochemical industries,
Using Neural Networks for Identification and Control of Systems
 Using Neural Networks for Identification and Control of Systems Jhonatam Cordeiro Department of Industrial and Systems Engineering North Carolina A&T State University, Greensboro, NC 27411 jcrodrig@aggies.ncat.edu
Using Neural Networks for Identification and Control of Systems Jhonatam Cordeiro Department of Industrial and Systems Engineering North Carolina A&T State University, Greensboro, NC 27411 jcrodrig@aggies.ncat.edu
Modeling and Model Predictive Control of Nonlinear Hydraulic System
 Modeling and Model Predictive Control of Nonlinear Hydraulic System Petr Chalupa, Jakub Novák Department of Process Control, Faculty of Applied Informatics, Tomas Bata University in Zlin, nám. T. G. Masaryka
Modeling and Model Predictive Control of Nonlinear Hydraulic System Petr Chalupa, Jakub Novák Department of Process Control, Faculty of Applied Informatics, Tomas Bata University in Zlin, nám. T. G. Masaryka
Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 7 Modeling Modeling is the process of representing the behavior of a real
Modeling and Simulation Revision IV D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 7 Modeling Modeling is the process of representing the behavior of a real
Lecture 1: Introduction to System Modeling and Control. Introduction Basic Definitions Different Model Types System Identification
 Lecture 1: Introduction to System Modeling and Control Introduction Basic Definitions Different Model Types System Identification What is Mathematical Model? A set of mathematical equations (e.g., differential
Lecture 1: Introduction to System Modeling and Control Introduction Basic Definitions Different Model Types System Identification What is Mathematical Model? A set of mathematical equations (e.g., differential
Optimal Polynomial Control for Discrete-Time Systems
 1 Optimal Polynomial Control for Discrete-Time Systems Prof Guy Beale Electrical and Computer Engineering Department George Mason University Fairfax, Virginia Correspondence concerning this paper should
1 Optimal Polynomial Control for Discrete-Time Systems Prof Guy Beale Electrical and Computer Engineering Department George Mason University Fairfax, Virginia Correspondence concerning this paper should
Process Modelling, Identification, and Control
 Jan Mikles Miroslav Fikar 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Process Modelling, Identification, and
Jan Mikles Miroslav Fikar 2008 AGI-Information Management Consultants May be used for personal purporses only or by libraries associated to dandelon.com network. Process Modelling, Identification, and
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL
 GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
GAIN SCHEDULING CONTROL WITH MULTI-LOOP PID FOR 2- DOF ARM ROBOT TRAJECTORY CONTROL 1 KHALED M. HELAL, 2 MOSTAFA R.A. ATIA, 3 MOHAMED I. ABU EL-SEBAH 1, 2 Mechanical Engineering Department ARAB ACADEMY
Analysis and Synthesis of Single-Input Single-Output Control Systems
 Lino Guzzella Analysis and Synthesis of Single-Input Single-Output Control Systems l+kja» \Uja>)W2(ja»\ um Contents 1 Definitions and Problem Formulations 1 1.1 Introduction 1 1.2 Definitions 1 1.2.1 Systems
Lino Guzzella Analysis and Synthesis of Single-Input Single-Output Control Systems l+kja» \Uja>)W2(ja»\ um Contents 1 Definitions and Problem Formulations 1 1.1 Introduction 1 1.2 Definitions 1 1.2.1 Systems
Intelligent Systems and Control Prof. Laxmidhar Behera Indian Institute of Technology, Kanpur
 Intelligent Systems and Control Prof. Laxmidhar Behera Indian Institute of Technology, Kanpur Module - 2 Lecture - 4 Introduction to Fuzzy Logic Control In this lecture today, we will be discussing fuzzy
Intelligent Systems and Control Prof. Laxmidhar Behera Indian Institute of Technology, Kanpur Module - 2 Lecture - 4 Introduction to Fuzzy Logic Control In this lecture today, we will be discussing fuzzy
EECE Adaptive Control
 EECE 574 - Adaptive Control Overview Guy Dumont Department of Electrical and Computer Engineering University of British Columbia Lectures: Thursday 09h00-12h00 Location: PPC 101 Guy Dumont (UBC) EECE 574
EECE 574 - Adaptive Control Overview Guy Dumont Department of Electrical and Computer Engineering University of British Columbia Lectures: Thursday 09h00-12h00 Location: PPC 101 Guy Dumont (UBC) EECE 574
INSTRUMENTAL ENGINEERING
 INSTRUMENTAL ENGINEERING Subject Code: IN Course Structure Sections/Units Section A Unit 1 Unit 2 Unit 3 Unit 4 Unit 5 Unit 6 Section B Section C Section D Section E Section F Section G Section H Section
INSTRUMENTAL ENGINEERING Subject Code: IN Course Structure Sections/Units Section A Unit 1 Unit 2 Unit 3 Unit 4 Unit 5 Unit 6 Section B Section C Section D Section E Section F Section G Section H Section
Design of Classical and State Space Controller Using a Moving Coil Machine Folayan Gbenga, Adeoye O. S.
 2015 IJSRST Volume 1 Issue 3 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Engineering Design of Classical and State Space Controller Using a Moving Coil Machine Folayan Gbenga, Adeoye O.
2015 IJSRST Volume 1 Issue 3 Print ISSN: 2395-6011 Online ISSN: 2395-602X Themed Section: Engineering Design of Classical and State Space Controller Using a Moving Coil Machine Folayan Gbenga, Adeoye O.
Advanced Adaptive Control for Unintended System Behavior
 Advanced Adaptive Control for Unintended System Behavior Dr. Chengyu Cao Mechanical Engineering University of Connecticut ccao@engr.uconn.edu jtang@engr.uconn.edu Outline Part I: Challenges: Unintended
Advanced Adaptive Control for Unintended System Behavior Dr. Chengyu Cao Mechanical Engineering University of Connecticut ccao@engr.uconn.edu jtang@engr.uconn.edu Outline Part I: Challenges: Unintended
Automatic Control II Computer exercise 3. LQG Design
 Uppsala University Information Technology Systems and Control HN,FS,KN 2000-10 Last revised by HR August 16, 2017 Automatic Control II Computer exercise 3 LQG Design Preparations: Read Chapters 5 and 9
Uppsala University Information Technology Systems and Control HN,FS,KN 2000-10 Last revised by HR August 16, 2017 Automatic Control II Computer exercise 3 LQG Design Preparations: Read Chapters 5 and 9
General procedure for formulation of robot dynamics STEP 1 STEP 3. Module 9 : Robot Dynamics & controls
 Module 9 : Robot Dynamics & controls Lecture 32 : General procedure for dynamics equation forming and introduction to control Objectives In this course you will learn the following Lagrangian Formulation
Module 9 : Robot Dynamics & controls Lecture 32 : General procedure for dynamics equation forming and introduction to control Objectives In this course you will learn the following Lagrangian Formulation
Control Systems I. Lecture 2: Modeling. Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch Emilio Frazzoli
 Control Systems I Lecture 2: Modeling Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch. 2-3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 29, 2017 E. Frazzoli
Control Systems I Lecture 2: Modeling Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch. 2-3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 29, 2017 E. Frazzoli
Modeling and Identification of Dynamic Systems (vimmd312, 2018)
") Modeling and Identification of Dynamic Systems (vimmd312, 2018) Textbook background of the curriculum taken. In parenthesis: material not reviewed due to time shortage, but which is suggested to be read
Modeling and Identification of Dynamic Systems (vimmd312, 2018) Textbook background of the curriculum taken. In parenthesis: material not reviewed due to time shortage, but which is suggested to be read
EE C128 / ME C134 Feedback Control Systems
 EE C128 / ME C134 Feedback Control Systems Lecture Additional Material Introduction to Model Predictive Control Maximilian Balandat Department of Electrical Engineering & Computer Science University of
EE C128 / ME C134 Feedback Control Systems Lecture Additional Material Introduction to Model Predictive Control Maximilian Balandat Department of Electrical Engineering & Computer Science University of
FUZZY CONTROL CONVENTIONAL CONTROL CONVENTIONAL CONTROL CONVENTIONAL CONTROL CONVENTIONAL CONTROL CONVENTIONAL CONTROL
 Eample: design a cruise control system After gaining an intuitive understanding of the plant s dynamics and establishing the design objectives, the control engineer typically solves the cruise control
Eample: design a cruise control system After gaining an intuitive understanding of the plant s dynamics and establishing the design objectives, the control engineer typically solves the cruise control
Trajectory Planning, Setpoint Generation and Feedforward for Motion Systems
 2 Trajectory Planning, Setpoint Generation and Feedforward for Motion Systems Paul Lambrechts Digital Motion Control (4K4), 23 Faculty of Mechanical Engineering, Control Systems Technology Group /42 2
2 Trajectory Planning, Setpoint Generation and Feedforward for Motion Systems Paul Lambrechts Digital Motion Control (4K4), 23 Faculty of Mechanical Engineering, Control Systems Technology Group /42 2
Control Systems Lab - SC4070 Control techniques
 Control Systems Lab - SC4070 Control techniques Dr. Manuel Mazo Jr. Delft Center for Systems and Control (TU Delft) m.mazo@tudelft.nl Tel.:015-2788131 TU Delft, February 16, 2015 (slides modified from
Control Systems Lab - SC4070 Control techniques Dr. Manuel Mazo Jr. Delft Center for Systems and Control (TU Delft) m.mazo@tudelft.nl Tel.:015-2788131 TU Delft, February 16, 2015 (slides modified from
Nonlinear Adaptive Robust Control. Theory and Applications to the Integrated Design of Intelligent and Precision Mechatronic Systems.
 A Short Course on Nonlinear Adaptive Robust Control Theory and Applications to the Integrated Design of Intelligent and Precision Mechatronic Systems Bin Yao Intelligent and Precision Control Laboratory
A Short Course on Nonlinear Adaptive Robust Control Theory and Applications to the Integrated Design of Intelligent and Precision Mechatronic Systems Bin Yao Intelligent and Precision Control Laboratory
MODELLING ANALYSIS & DESIGN OF DSP BASED NOVEL SPEED SENSORLESS VECTOR CONTROLLER FOR INDUCTION MOTOR DRIVE
 International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 6, Issue 3, March, 2015, pp. 70-81, Article ID: IJARET_06_03_008 Available online at http://www.iaeme.com/ijaret/issues.asp?jtypeijaret&vtype=6&itype=3
International Journal of Advanced Research in Engineering and Technology (IJARET) Volume 6, Issue 3, March, 2015, pp. 70-81, Article ID: IJARET_06_03_008 Available online at http://www.iaeme.com/ijaret/issues.asp?jtypeijaret&vtype=6&itype=3
(Refer Slide Time: 00:01:30 min)
") Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
CDS 101/110a: Lecture 10-1 Robust Performance
 CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
CDS 11/11a: Lecture 1-1 Robust Performance Richard M. Murray 1 December 28 Goals: Describe how to represent uncertainty in process dynamics Describe how to analyze a system in the presence of uncertainty
Design Artificial Nonlinear Controller Based on Computed Torque like Controller with Tunable Gain
 World Applied Sciences Journal 14 (9): 1306-1312, 2011 ISSN 1818-4952 IDOSI Publications, 2011 Design Artificial Nonlinear Controller Based on Computed Torque like Controller with Tunable Gain Samira Soltani
World Applied Sciences Journal 14 (9): 1306-1312, 2011 ISSN 1818-4952 IDOSI Publications, 2011 Design Artificial Nonlinear Controller Based on Computed Torque like Controller with Tunable Gain Samira Soltani
MATH4406 (Control Theory) Unit 1: Introduction Prepared by Yoni Nazarathy, July 21, 2012
 Unit 1: Introduction Prepared by Yoni Nazarathy, July 21, 2012") MATH4406 (Control Theory) Unit 1: Introduction Prepared by Yoni Nazarathy, July 21, 2012 Unit Outline Introduction to the course: Course goals, assessment, etc... What is Control Theory A bit of jargon,
MATH4406 (Control Theory) Unit 1: Introduction Prepared by Yoni Nazarathy, July 21, 2012 Unit Outline Introduction to the course: Course goals, assessment, etc... What is Control Theory A bit of jargon,
Lecture 12. Upcoming labs: Final Exam on 12/21/2015 (Monday)10:30-12:30
10:30-12:30") 289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
H-infinity Model Reference Controller Design for Magnetic Levitation System
 H.I. Ali Control and Systems Engineering Department, University of Technology Baghdad, Iraq 6043@uotechnology.edu.iq H-infinity Model Reference Controller Design for Magnetic Levitation System Abstract-
H.I. Ali Control and Systems Engineering Department, University of Technology Baghdad, Iraq 6043@uotechnology.edu.iq H-infinity Model Reference Controller Design for Magnetic Levitation System Abstract-
Lecture 9. Introduction to Kalman Filtering. Linear Quadratic Gaussian Control (LQG) G. Hovland 2004
 G. Hovland 2004") MER42 Advanced Control Lecture 9 Introduction to Kalman Filtering Linear Quadratic Gaussian Control (LQG) G. Hovland 24 Announcement No tutorials on hursday mornings 8-9am I will be present in all practical
MER42 Advanced Control Lecture 9 Introduction to Kalman Filtering Linear Quadratic Gaussian Control (LQG) G. Hovland 24 Announcement No tutorials on hursday mornings 8-9am I will be present in all practical
EET 3212 Control Systems. Control Systems Engineering, 6th Edition, Norman S. Nise December 2010, A. Goykadosh and M.
 NEW YORK CITY COLLEGE OF TECHNOLOGY The City University of New York 300 Jay Street Brooklyn, NY 11201-2983 Department of Electrical and Telecommunications Engineering Technology TEL (718) 260-5300 - FAX:
NEW YORK CITY COLLEGE OF TECHNOLOGY The City University of New York 300 Jay Street Brooklyn, NY 11201-2983 Department of Electrical and Telecommunications Engineering Technology TEL (718) 260-5300 - FAX:
R a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies.
 Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies.") SET - 1 II B. Tech II Semester Supplementary Examinations Dec 01 1. a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies..
SET - 1 II B. Tech II Semester Supplementary Examinations Dec 01 1. a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies..
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Guidance and Control Introduction and PID Loops Dr. Kostas Alexis (CSE) Autonomous Robot Challenges How do I control where to go? Autonomous Mobile Robot Design Topic:
Autonomous Mobile Robot Design Topic: Guidance and Control Introduction and PID Loops Dr. Kostas Alexis (CSE) Autonomous Robot Challenges How do I control where to go? Autonomous Mobile Robot Design Topic:
MCE503: Modeling and Simulation of Mechatronic Systems
 MCE503: Modeling and Simulation of Mechatronic Systems Lecture 1: Introduction Cleveland State University Mechanical Engineering Hanz Richter, PhD MCE503 p.1/11 What is Mechatronics? Term understood in
MCE503: Modeling and Simulation of Mechatronic Systems Lecture 1: Introduction Cleveland State University Mechanical Engineering Hanz Richter, PhD MCE503 p.1/11 What is Mechatronics? Term understood in
System Identification for Process Control: Recent Experiences and a Personal Outlook
 System Identification for Process Control: Recent Experiences and a Personal Outlook Yucai Zhu Eindhoven University of Technology Eindhoven, The Netherlands and Tai-Ji Control Best, The Netherlands Contents
System Identification for Process Control: Recent Experiences and a Personal Outlook Yucai Zhu Eindhoven University of Technology Eindhoven, The Netherlands and Tai-Ji Control Best, The Netherlands Contents
Chapter 4 Neural Networks in System Identification
 Chapter 4 Neural Networks in System Identification Gábor HORVÁTH Department of Measurement and Information Systems Budapest University of Technology and Economics Magyar tudósok körútja 2, 52 Budapest,
Chapter 4 Neural Networks in System Identification Gábor HORVÁTH Department of Measurement and Information Systems Budapest University of Technology and Economics Magyar tudósok körútja 2, 52 Budapest,
Chapter 3. State Feedback - Pole Placement. Motivation
 Chapter 3 State Feedback - Pole Placement Motivation Whereas classical control theory is based on output feedback, this course mainly deals with control system design by state feedback. This model-based
Chapter 3 State Feedback - Pole Placement Motivation Whereas classical control theory is based on output feedback, this course mainly deals with control system design by state feedback. This model-based
Chapter 3. LQ, LQG and Control System Design. Dutch Institute of Systems and Control
 Chapter 3 LQ, LQG and Control System H 2 Design Overview LQ optimization state feedback LQG optimization output feedback H 2 optimization non-stochastic version of LQG Application to feedback system design
Chapter 3 LQ, LQG and Control System H 2 Design Overview LQ optimization state feedback LQG optimization output feedback H 2 optimization non-stochastic version of LQG Application to feedback system design
Two-Link Flexible Manipulator Control Using Sliding Mode Control Based Linear Matrix Inequality
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Two-Link Flexible Manipulator Control Using Sliding Mode Control Based Linear Matrix Inequality To cite this article: Zulfatman
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Two-Link Flexible Manipulator Control Using Sliding Mode Control Based Linear Matrix Inequality To cite this article: Zulfatman
CONTROL OF DIGITAL SYSTEMS
 AUTOMATIC CONTROL AND SYSTEM THEORY CONTROL OF DIGITAL SYSTEMS Gianluca Palli Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna Email: gianluca.palli@unibo.it
AUTOMATIC CONTROL AND SYSTEM THEORY CONTROL OF DIGITAL SYSTEMS Gianluca Palli Dipartimento di Ingegneria dell Energia Elettrica e dell Informazione (DEI) Università di Bologna Email: gianluca.palli@unibo.it
Acceleration Feedback
 Acceleration Feedback Mechanical Engineer Modeling & Simulation Electro- Mechanics Electrical- Electronics Engineer Sensors Actuators Computer Systems Engineer Embedded Control Controls Engineer Mechatronic
Acceleration Feedback Mechanical Engineer Modeling & Simulation Electro- Mechanics Electrical- Electronics Engineer Sensors Actuators Computer Systems Engineer Embedded Control Controls Engineer Mechatronic
Digital Control Engineering Analysis and Design
 Digital Control Engineering Analysis and Design M. Sami Fadali Antonio Visioli AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO Academic Press is
Digital Control Engineering Analysis and Design M. Sami Fadali Antonio Visioli AMSTERDAM BOSTON HEIDELBERG LONDON NEW YORK OXFORD PARIS SAN DIEGO SAN FRANCISCO SINGAPORE SYDNEY TOKYO Academic Press is
MODELLING ANALYSIS & DESIGN OF DSP BASED NOVEL SPEED SENSORLESS VECTOR CONTROLLER FOR INDUCTION MOTOR DRIVE
 INTERNATIONAL JOURNAL OF ADVANCED RESEARCH IN ENGINEERING International Journal of Advanced Research in Engineering and Technology (IJARET), ISSN 0976 6480(Print), ISSN 0976 6499(Online), AND TECHNOLOGY
INTERNATIONAL JOURNAL OF ADVANCED RESEARCH IN ENGINEERING International Journal of Advanced Research in Engineering and Technology (IJARET), ISSN 0976 6480(Print), ISSN 0976 6499(Online), AND TECHNOLOGY
ADAPTIVE NEURAL NETWORK CONTROL OF MECHATRONICS OBJECTS
 acta mechanica et automatica, vol.2 no.4 (28) ADAPIE NEURAL NEWORK CONROL OF MECHARONICS OBJECS Egor NEMSE *, Yuri ZHUKO * * Baltic State echnical University oenmeh, 985, St. Petersburg, Krasnoarmeyskaya,
acta mechanica et automatica, vol.2 no.4 (28) ADAPIE NEURAL NEWORK CONROL OF MECHARONICS OBJECS Egor NEMSE *, Yuri ZHUKO * * Baltic State echnical University oenmeh, 985, St. Petersburg, Krasnoarmeyskaya,
RECURSIVE SUBSPACE IDENTIFICATION IN THE LEAST SQUARES FRAMEWORK
 RECURSIVE SUBSPACE IDENTIFICATION IN THE LEAST SQUARES FRAMEWORK TRNKA PAVEL AND HAVLENA VLADIMÍR Dept of Control Engineering, Czech Technical University, Technická 2, 166 27 Praha, Czech Republic mail:
RECURSIVE SUBSPACE IDENTIFICATION IN THE LEAST SQUARES FRAMEWORK TRNKA PAVEL AND HAVLENA VLADIMÍR Dept of Control Engineering, Czech Technical University, Technická 2, 166 27 Praha, Czech Republic mail:
PRECISION CONTROL OF LINEAR MOTOR DRIVEN HIGH-SPEED/ACCELERATION ELECTRO-MECHANICAL SYSTEMS. Bin Yao
 PRECISION CONTROL OF LINEAR MOTOR DRIVEN HIGH-SPEED/ACCELERATION ELECTRO-MECHANICAL SYSTEMS Bin Yao Intelligent and Precision Control Laboratory School of Mechanical Engineering Purdue University West
PRECISION CONTROL OF LINEAR MOTOR DRIVEN HIGH-SPEED/ACCELERATION ELECTRO-MECHANICAL SYSTEMS Bin Yao Intelligent and Precision Control Laboratory School of Mechanical Engineering Purdue University West
POWER SYSTEM DYNAMIC SECURITY ASSESSMENT CLASSICAL TO MODERN APPROACH
 Abstract POWER SYSTEM DYNAMIC SECURITY ASSESSMENT CLASSICAL TO MODERN APPROACH A.H.M.A.Rahim S.K.Chakravarthy Department of Electrical Engineering K.F. University of Petroleum and Minerals Dhahran. Dynamic
Abstract POWER SYSTEM DYNAMIC SECURITY ASSESSMENT CLASSICAL TO MODERN APPROACH A.H.M.A.Rahim S.K.Chakravarthy Department of Electrical Engineering K.F. University of Petroleum and Minerals Dhahran. Dynamic
Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators
 Shock and Vibration, Article ID 71814, 5 pages http://dx.doi.org/1.1155/214/71814 Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators Sajad
Shock and Vibration, Article ID 71814, 5 pages http://dx.doi.org/1.1155/214/71814 Research Article Experimental Parametric Identification of a Flexible Beam Using Piezoelectric Sensors and Actuators Sajad
Rozwiązanie zagadnienia odwrotnego wyznaczania sił obciąŝających konstrukcje w czasie eksploatacji
 Rozwiązanie zagadnienia odwrotnego wyznaczania sił obciąŝających konstrukcje w czasie eksploatacji Tadeusz Uhl Piotr Czop Krzysztof Mendrok Faculty of Mechanical Engineering and Robotics Department of
Rozwiązanie zagadnienia odwrotnego wyznaczania sił obciąŝających konstrukcje w czasie eksploatacji Tadeusz Uhl Piotr Czop Krzysztof Mendrok Faculty of Mechanical Engineering and Robotics Department of
EI6801 Computer Control of Processes Dept. of EIE and ICE
 Unit I DISCRETE STATE-VARIABLE TECHNIQUE State equation of discrete data system with sample and hold State transition equation Methods of computing the state transition matrix Decomposition of discrete
Unit I DISCRETE STATE-VARIABLE TECHNIQUE State equation of discrete data system with sample and hold State transition equation Methods of computing the state transition matrix Decomposition of discrete
Outline. Classical Control. Lecture 1
 Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Iterative Controller Tuning Using Bode s Integrals
 Iterative Controller Tuning Using Bode s Integrals A. Karimi, D. Garcia and R. Longchamp Laboratoire d automatique, École Polytechnique Fédérale de Lausanne (EPFL), 05 Lausanne, Switzerland. email: alireza.karimi@epfl.ch
Iterative Controller Tuning Using Bode s Integrals A. Karimi, D. Garcia and R. Longchamp Laboratoire d automatique, École Polytechnique Fédérale de Lausanne (EPFL), 05 Lausanne, Switzerland. email: alireza.karimi@epfl.ch
Gain Scheduling Control with Multi-loop PID for 2-DOF Arm Robot Trajectory Control
 Gain Scheduling Control with Multi-loop PID for 2-DOF Arm Robot Trajectory Control Khaled M. Helal, 2 Mostafa R.A. Atia, 3 Mohamed I. Abu El-Sebah, 2 Mechanical Engineering Department ARAB ACADEMY FOR
Gain Scheduling Control with Multi-loop PID for 2-DOF Arm Robot Trajectory Control Khaled M. Helal, 2 Mostafa R.A. Atia, 3 Mohamed I. Abu El-Sebah, 2 Mechanical Engineering Department ARAB ACADEMY FOR
Robust LQR Control Design of Gyroscope
 Robust LQR Control Design of Gyroscope Ashok S. Chandak 1, Anil J. Patil 2 Abstract The basic problem in designing control systems is the ability to achieve good performance in the presence of uncertainties
Robust LQR Control Design of Gyroscope Ashok S. Chandak 1, Anil J. Patil 2 Abstract The basic problem in designing control systems is the ability to achieve good performance in the presence of uncertainties
APPROXIMATE REALIZATION OF VALVE DYNAMICS WITH TIME DELAY
 APPROXIMATE REALIZATION OF VALVE DYNAMICS WITH TIME DELAY Jan van Helvoirt,,1 Okko Bosgra, Bram de Jager Maarten Steinbuch Control Systems Technology Group, Mechanical Engineering Department, Technische
APPROXIMATE REALIZATION OF VALVE DYNAMICS WITH TIME DELAY Jan van Helvoirt,,1 Okko Bosgra, Bram de Jager Maarten Steinbuch Control Systems Technology Group, Mechanical Engineering Department, Technische
LINEAR-QUADRATIC CONTROL OF A TWO-WHEELED ROBOT
 Доклади на Българската академия на науките Comptes rendus de l Académie bulgare des Sciences Tome 67, No 8, 2014 SCIENCES ET INGENIERIE Automatique et informatique Dedicated to the 145th Anniversary of
Доклади на Българската академия на науките Comptes rendus de l Académie bulgare des Sciences Tome 67, No 8, 2014 SCIENCES ET INGENIERIE Automatique et informatique Dedicated to the 145th Anniversary of
EFFICIENCY OPTIMIZATION OF VECTOR-CONTROLLED INDUCTION MOTOR DRIVE
 EFFICIENCY OPTIMIZATION OF VECTOR-CONTROLLED INDUCTION MOTOR DRIVE Hussein Sarhan Department of Mechatronics Engineering, Faculty of Engineering Technology, Amman, Jordan ABSTRACT This paper presents a
EFFICIENCY OPTIMIZATION OF VECTOR-CONTROLLED INDUCTION MOTOR DRIVE Hussein Sarhan Department of Mechatronics Engineering, Faculty of Engineering Technology, Amman, Jordan ABSTRACT This paper presents a
Model predictive control of industrial processes. Vitali Vansovitš
 Model predictive control of industrial processes Vitali Vansovitš Contents Industrial process (Iru Power Plant) Neural networ identification Process identification linear model Model predictive controller
Model predictive control of industrial processes Vitali Vansovitš Contents Industrial process (Iru Power Plant) Neural networ identification Process identification linear model Model predictive controller
Lab 3: Quanser Hardware and Proportional Control
 Lab 3: Quanser Hardware and Proportional Control The worst wheel of the cart makes the most noise. Benjamin Franklin 1 Objectives The goal of this lab is to: 1. familiarize you with Quanser s QuaRC tools
Lab 3: Quanser Hardware and Proportional Control The worst wheel of the cart makes the most noise. Benjamin Franklin 1 Objectives The goal of this lab is to: 1. familiarize you with Quanser s QuaRC tools
Input-output data sets for development and benchmarking in nonlinear identification
 Input-output data sets for development and benchmarking in nonlinear identification Torbjörn Wigren Division of Systems and Control, Department of Information Technology, Uppsala University, PO box 337,
Input-output data sets for development and benchmarking in nonlinear identification Torbjörn Wigren Division of Systems and Control, Department of Information Technology, Uppsala University, PO box 337,
NONLINEAR AND ADAPTIVE (INTELLIGENT) SYSTEMS MODELING, DESIGN, & CONTROL A Building Block Approach
 SYSTEMS MODELING, DESIGN, & CONTROL A Building Block Approach") NONLINEAR AND ADAPTIVE (INTELLIGENT) SYSTEMS MODELING, DESIGN, & CONTROL A Building Block Approach P.A. (Rama) Ramamoorthy Electrical & Computer Engineering and Comp. Science Dept., M.L. 30, University
NONLINEAR AND ADAPTIVE (INTELLIGENT) SYSTEMS MODELING, DESIGN, & CONTROL A Building Block Approach P.A. (Rama) Ramamoorthy Electrical & Computer Engineering and Comp. Science Dept., M.L. 30, University
Algorithm for Multiple Model Adaptive Control Based on Input-Output Plant Model
 BULGARIAN ACADEMY OF SCIENCES CYBERNEICS AND INFORMAION ECHNOLOGIES Volume No Sofia Algorithm for Multiple Model Adaptive Control Based on Input-Output Plant Model sonyo Slavov Department of Automatics
BULGARIAN ACADEMY OF SCIENCES CYBERNEICS AND INFORMAION ECHNOLOGIES Volume No Sofia Algorithm for Multiple Model Adaptive Control Based on Input-Output Plant Model sonyo Slavov Department of Automatics
DESIGN AND IMPLEMENTATION OF SENSORLESS SPEED CONTROL FOR INDUCTION MOTOR DRIVE USING AN OPTIMIZED EXTENDED KALMAN FILTER
 INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET) International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 ISSN 0976 6464(Print)
INTERNATIONAL JOURNAL OF ELECTRONICS AND COMMUNICATION ENGINEERING & TECHNOLOGY (IJECET) International Journal of Electronics and Communication Engineering & Technology (IJECET), ISSN 0976 ISSN 0976 6464(Print)
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Review
 Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
FUZZY LOGIC CONTROL Vs. CONVENTIONAL PID CONTROL OF AN INVERTED PENDULUM ROBOT
 http:// FUZZY LOGIC CONTROL Vs. CONVENTIONAL PID CONTROL OF AN INVERTED PENDULUM ROBOT 1 Ms.Mukesh Beniwal, 2 Mr. Davender Kumar 1 M.Tech Student, 2 Asst.Prof, Department of Electronics and Communication
http:// FUZZY LOGIC CONTROL Vs. CONVENTIONAL PID CONTROL OF AN INVERTED PENDULUM ROBOT 1 Ms.Mukesh Beniwal, 2 Mr. Davender Kumar 1 M.Tech Student, 2 Asst.Prof, Department of Electronics and Communication
Laboratory 11 Control Systems Laboratory ECE3557. State Feedback Controller for Position Control of a Flexible Joint
 Laboratory 11 State Feedback Controller for Position Control of a Flexible Joint 11.1 Objective The objective of this laboratory is to design a full state feedback controller for endpoint position control
Laboratory 11 State Feedback Controller for Position Control of a Flexible Joint 11.1 Objective The objective of this laboratory is to design a full state feedback controller for endpoint position control
Predictive Cascade Control of DC Motor
 Volume 49, Number, 008 89 Predictive Cascade Control of DC Motor Alexandru MORAR Abstract: The paper deals with the predictive cascade control of an electrical drive intended for positioning applications.
Volume 49, Number, 008 89 Predictive Cascade Control of DC Motor Alexandru MORAR Abstract: The paper deals with the predictive cascade control of an electrical drive intended for positioning applications.
CHAPTER 1 Basic Concepts of Control System. CHAPTER 6 Hydraulic Control System
 CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
System Modeling and Identification CHBE 702 Korea University Prof. Dae Ryook Yang
 System Modeling and Identification CHBE 702 Korea University Prof. Dae Ryook Yang 1-1 Course Description Emphases Delivering concepts and Practice Programming Identification Methods using Matlab Class
System Modeling and Identification CHBE 702 Korea University Prof. Dae Ryook Yang 1-1 Course Description Emphases Delivering concepts and Practice Programming Identification Methods using Matlab Class
OPTIMAL CONTROL AND ESTIMATION
 OPTIMAL CONTROL AND ESTIMATION Robert F. Stengel Department of Mechanical and Aerospace Engineering Princeton University, Princeton, New Jersey DOVER PUBLICATIONS, INC. New York CONTENTS 1. INTRODUCTION
OPTIMAL CONTROL AND ESTIMATION Robert F. Stengel Department of Mechanical and Aerospace Engineering Princeton University, Princeton, New Jersey DOVER PUBLICATIONS, INC. New York CONTENTS 1. INTRODUCTION
Subject: Optimal Control Assignment-1 (Related to Lecture notes 1-10)
") Subject: Optimal Control Assignment- (Related to Lecture notes -). Design a oil mug, shown in fig., to hold as much oil possible. The height and radius of the mug should not be more than 6cm. The mug must
Subject: Optimal Control Assignment- (Related to Lecture notes -). Design a oil mug, shown in fig., to hold as much oil possible. The height and radius of the mug should not be more than 6cm. The mug must
Comparison of four state observer design algorithms for MIMO system
 Archives of Control Sciences Volume 23(LIX), 2013 No. 2, pages 131 144 Comparison of four state observer design algorithms for MIMO system VINODH KUMAR. E, JOVITHA JEROME and S. AYYAPPAN A state observer
Archives of Control Sciences Volume 23(LIX), 2013 No. 2, pages 131 144 Comparison of four state observer design algorithms for MIMO system VINODH KUMAR. E, JOVITHA JEROME and S. AYYAPPAN A state observer
Machine Learning. Neural Networks. (slides from Domingos, Pardo, others)
") Machine Learning Neural Networks (slides from Domingos, Pardo, others) For this week, Reading Chapter 4: Neural Networks (Mitchell, 1997) See Canvas For subsequent weeks: Scaling Learning Algorithms toward
Machine Learning Neural Networks (slides from Domingos, Pardo, others) For this week, Reading Chapter 4: Neural Networks (Mitchell, 1997) See Canvas For subsequent weeks: Scaling Learning Algorithms toward
Industrial Model Predictive Control
 Industrial Model Predictive Control Emil Schultz Christensen Kongens Lyngby 2013 DTU Compute-M.Sc.-2013-49 Technical University of Denmark DTU Compute Matematiktovet, Building 303B, DK-2800 Kongens Lyngby,
Industrial Model Predictive Control Emil Schultz Christensen Kongens Lyngby 2013 DTU Compute-M.Sc.-2013-49 Technical University of Denmark DTU Compute Matematiktovet, Building 303B, DK-2800 Kongens Lyngby,
CHAPTER INTRODUCTION
 CHAPTER 3 DYNAMIC RESPONSE OF 2 DOF QUARTER CAR PASSIVE SUSPENSION SYSTEM (QC-PSS) AND 2 DOF QUARTER CAR ELECTROHYDRAULIC ACTIVE SUSPENSION SYSTEM (QC-EH-ASS) 3.1 INTRODUCTION In this chapter, the dynamic
CHAPTER 3 DYNAMIC RESPONSE OF 2 DOF QUARTER CAR PASSIVE SUSPENSION SYSTEM (QC-PSS) AND 2 DOF QUARTER CAR ELECTROHYDRAULIC ACTIVE SUSPENSION SYSTEM (QC-EH-ASS) 3.1 INTRODUCTION In this chapter, the dynamic
CDS 101/110a: Lecture 1.1 Introduction to Feedback & Control. CDS 101/110 Course Sequence
 CDS 101/110a: Lecture 1.1 Introduction to Feedback & Control Richard M. Murray 28 September 2015 Goals: Give an overview of CDS 101/110: course structure & administration Define feedback systems and learn
CDS 101/110a: Lecture 1.1 Introduction to Feedback & Control Richard M. Murray 28 September 2015 Goals: Give an overview of CDS 101/110: course structure & administration Define feedback systems and learn
Online monitoring of MPC disturbance models using closed-loop data
 Online monitoring of MPC disturbance models using closed-loop data Brian J. Odelson and James B. Rawlings Department of Chemical Engineering University of Wisconsin-Madison Online Optimization Based Identification
Online monitoring of MPC disturbance models using closed-loop data Brian J. Odelson and James B. Rawlings Department of Chemical Engineering University of Wisconsin-Madison Online Optimization Based Identification
CHAPTER 4 FUZZY AND NEURAL NETWORK FOR SR MOTOR
 CHAPTER 4 FUZZY AND NEURAL NETWORK FOR SR MOTOR 4.1 Introduction Fuzzy Logic control is based on fuzzy set theory. A fuzzy set is a set having uncertain and imprecise nature of abstract thoughts, concepts
CHAPTER 4 FUZZY AND NEURAL NETWORK FOR SR MOTOR 4.1 Introduction Fuzzy Logic control is based on fuzzy set theory. A fuzzy set is a set having uncertain and imprecise nature of abstract thoughts, concepts
Iterative Learning Control Analysis and Design I
 Iterative Learning Control Analysis and Design I Electronics and Computer Science University of Southampton Southampton, SO17 1BJ, UK etar@ecs.soton.ac.uk http://www.ecs.soton.ac.uk/ Contents Basics Representations
Iterative Learning Control Analysis and Design I Electronics and Computer Science University of Southampton Southampton, SO17 1BJ, UK etar@ecs.soton.ac.uk http://www.ecs.soton.ac.uk/ Contents Basics Representations
Comparison of Feedback Controller for Link Stabilizing Units of the Laser Based Synchronization System used at the European XFEL
 Comparison of Feedback Controller for Link Stabilizing Units of the Laser Based Synchronization System used at the European XFEL M. Heuer 1 G. Lichtenberg 2 S. Pfeiffer 1 H. Schlarb 1 1 Deutsches Elektronen
Comparison of Feedback Controller for Link Stabilizing Units of the Laser Based Synchronization System used at the European XFEL M. Heuer 1 G. Lichtenberg 2 S. Pfeiffer 1 H. Schlarb 1 1 Deutsches Elektronen
An Adaptive LQG Combined With the MRAS Based LFFC for Motion Control Systems
 Journal of Automation Control Engineering Vol 3 No 2 April 2015 An Adaptive LQG Combined With the MRAS Based LFFC for Motion Control Systems Nguyen Duy Cuong Nguyen Van Lanh Gia Thi Dinh Electronics Faculty
Journal of Automation Control Engineering Vol 3 No 2 April 2015 An Adaptive LQG Combined With the MRAS Based LFFC for Motion Control Systems Nguyen Duy Cuong Nguyen Van Lanh Gia Thi Dinh Electronics Faculty
Introduction to. Process Control. Ahmet Palazoglu. Second Edition. Jose A. Romagnoli. CRC Press. Taylor & Francis Group. Taylor & Francis Group,
 Introduction to Process Control Second Edition Jose A. Romagnoli Ahmet Palazoglu CRC Press Taylor & Francis Group Boca Raton London NewYork CRC Press is an imprint of the Taylor & Francis Group, an informa
Introduction to Process Control Second Edition Jose A. Romagnoli Ahmet Palazoglu CRC Press Taylor & Francis Group Boca Raton London NewYork CRC Press is an imprint of the Taylor & Francis Group, an informa
Virtual Sensor Technology for Process Optimization. Edward Wilson Neural Applications Corporation
 Virtual Sensor Technology for Process Optimization Edward Wilson Neural Applications Corporation ewilson@neural.com Virtual Sensor (VS) Also known as soft sensor, smart sensor, estimator, etc. Used in
Virtual Sensor Technology for Process Optimization Edward Wilson Neural Applications Corporation ewilson@neural.com Virtual Sensor (VS) Also known as soft sensor, smart sensor, estimator, etc. Used in
Study on Dahlin algorithm of Brushless DC motor based on Neural. Network
 Joint International Mechanical, Electronic and Information Technology Conference (JIMET 205) Study on Dahlin algorithm of Brushless DC motor based on Neural Network ZILONG HUANG DAN WANG2, LELE XI 3, YANKAI
Joint International Mechanical, Electronic and Information Technology Conference (JIMET 205) Study on Dahlin algorithm of Brushless DC motor based on Neural Network ZILONG HUANG DAN WANG2, LELE XI 3, YANKAI
Lecture 4: Feed Forward Neural Networks
 Lecture 4: Feed Forward Neural Networks Dr. Roman V Belavkin Middlesex University BIS4435 Biological neurons and the brain A Model of A Single Neuron Neurons as data-driven models Neural Networks Training
Lecture 4: Feed Forward Neural Networks Dr. Roman V Belavkin Middlesex University BIS4435 Biological neurons and the brain A Model of A Single Neuron Neurons as data-driven models Neural Networks Training
Presentation Topic 1: Feedback Control. Copyright 1998 DLMattern
 Presentation Topic 1: Feedback Control Outline Feedback Terminology Purpose of Feedback Limitations of Feedback Linear Control Design Techniques Nonlinear Control Design Techniques Rapid Prototyping Environments
Presentation Topic 1: Feedback Control Outline Feedback Terminology Purpose of Feedback Limitations of Feedback Linear Control Design Techniques Nonlinear Control Design Techniques Rapid Prototyping Environments
EEE582 Homework Problems
 EEE582 Homework Problems HW. Write a state-space realization of the linearized model for the cruise control system around speeds v = 4 (Section.3, http://tsakalis.faculty.asu.edu/notes/models.pdf). Use
EEE582 Homework Problems HW. Write a state-space realization of the linearized model for the cruise control system around speeds v = 4 (Section.3, http://tsakalis.faculty.asu.edu/notes/models.pdf). Use
AN IDENTIFICATION ALGORITHM FOR ARMAX SYSTEMS
 AN IDENTIFICATION ALGORITHM FOR ARMAX SYSTEMS First the X, then the AR, finally the MA Jan C. Willems, K.U. Leuven Workshop on Observation and Estimation Ben Gurion University, July 3, 2004 p./2 Joint
AN IDENTIFICATION ALGORITHM FOR ARMAX SYSTEMS First the X, then the AR, finally the MA Jan C. Willems, K.U. Leuven Workshop on Observation and Estimation Ben Gurion University, July 3, 2004 p./2 Joint