Digital Signal Processing Lecture 10 - Discrete Fourier Transform
|
|
|
- Marianna Brooks
- 5 years ago
- Views:
Transcription
1 Digital Signal Processing - Discrete Fourier Transform Electrical Engineering and Computer Science University of Tennessee, Knoxville November 12, 2015
2 Overview
3 Review - 1 Introduction Discrete-time signals and systems - LTI systems Unit sample response h[n]: uniquely characterizes an LTI system Linear constant-coefficient difference equation Frequency response: H(e jω ) Complex exponentials being eigenvalues of an LTI system: y[n] = H(e jω )x[n] Fourier transform z transform The z-transform, X(z) = n= x[n]z n Region of convergence - the z-plane System function, H(z) Properties of the z-transform The significance of zeros The inverse z-transform Relationships between the n, ω, and z domains: Knowing the correspondence between h[n], H(e jω ), and the pole-zero plot
4 Review - 2 Design structures Block diagram vs. Signal flow graph: Knowing how to determine system function, unit sample response, or difference equation from the graphs Different design structures: Knowing pros and cons of each form [Direct form I (zeros first), Direct form II (poles first) - Canonic structure, Transposed direct form II (zeros first), Cascade form, Parallel form, Coupled form] Specific to IIR or FIR: Feedback in IIR (computable vs. noncomputable), Linear phase in FIR Metrics: computational resource and precision Sources of errors: Knowing the concept of pole sensitivity of 2nd-order structures leading to coupled form design, and coefficient quantization examples between direct form vs. cascade form
5 Review - 3 Filter design IIR: CT > DT (impulse invariance vs. bilinear transformation) FIR Knowing the characteristics of the four types of causal linear phase FIR filters Window method - Kaiser window: must use minimum specs; the approximation error is scaled by the size of the jump that produces them Optimal method (Alternation theorem <knowing how to determine the number of alternations>, PM algorithm)
6 Discrete-Time Fourier Transform () Fourier transform representation of x[n] X(e jω ) = x[n] = 1 2π n= π π x[n]e jωn (1) X(e jω )e jωn dω (2) Existence of Fourier transform Absolutely summable (a sufficient condition), n= x[n] < leading to uniform convergence, π lim M π X(ejω ) X M (e jω ) dω = 0 Square summable, n= x[n] 2 <, leading to mean-square convergence, π lim M π X(ejω ) X M (e jω ) 2 dω = 0
7 Discrete Fourier Series () Periodic sequence does not satisfy either absolutely summable or square summable, therefore, it does not have a Fourier representation However, sequences expressed as a sum of complex exponentials can be considered to have an FT representation, i.e., as a train of impulses. X(e jω ) = r= 2πa k δ(ω ω k + 2πr) k Interpret of a periodic signal to be an impulse train in the frequency domain with the impulse values proportional to the coefficients.
8 - cont d X[k] = x[n] = 1 N where W N = e j(2π/n). N 1 n=0 N 1 k=0 x[n]w kn N X[k]W kn N Since any periodic sequence can be represented as a sum of complex exponentials X(e jω ) = k= 2π N X[k]δ(ω 2πk N )
9 Finite-length signal vs. periodic signal x[n] = x[n] p[n] = x[n] δ[n rn] = x[n rn] r= r= x[n] = x[((n)) N ] X[k] = X[((k)) N ]
10 Discrete Fourier Transform () X[k] = N 1 n=0 x[n]w kn N, 0 k N 1 x[n] = 1 N 1 kn N k=0 X[k]WN, 0 n N 1 coefficients are samples of the z-transform at equal-sapce points on the unit circle X(z) = N 1 n=0 x[n]z n, X(k) = X(z) z=w k, k = 0,, N 1 N
11 Relationship between,, and
12 Properties of Shifting properties Duality Convolution property - circular convolution. Think about circular convolution as wrapping the sequence on the surface of two cylinders, one inside another; then convolution is done by rotate the inner cylinder with respect to the outter one. Circular convolution = linear convolution plus aliasing
13 Shifting property
14 Duality property
15 Convolution property
16 Use circular convolution to implement linear convolution
17 Use circular convolution to implement linear convolution - aliasing
18 Use circular convolution to implement linear convolution - zero padding Frequency-domain calculation (a) x 1 [n] X 1 [k], x 2 [n] X 2 [k] (b) X 3 [k] = X 1 [k].x 2 [k] (c) x 3 [n] = x 1 [n]sx 2 [n] = inverse of X 3 [k] (note that I use S to represent circular convolution.) Length of circular convolution x 1 [n] of length L x 2 [n] of length P x 3 [n] = x 1 [n] x 2 [n] of length L + P 1 circular convolution has to be longer than the linear convolution. Time aliasing can be avoided if N L + P 1
19 Example - 2D Convolution

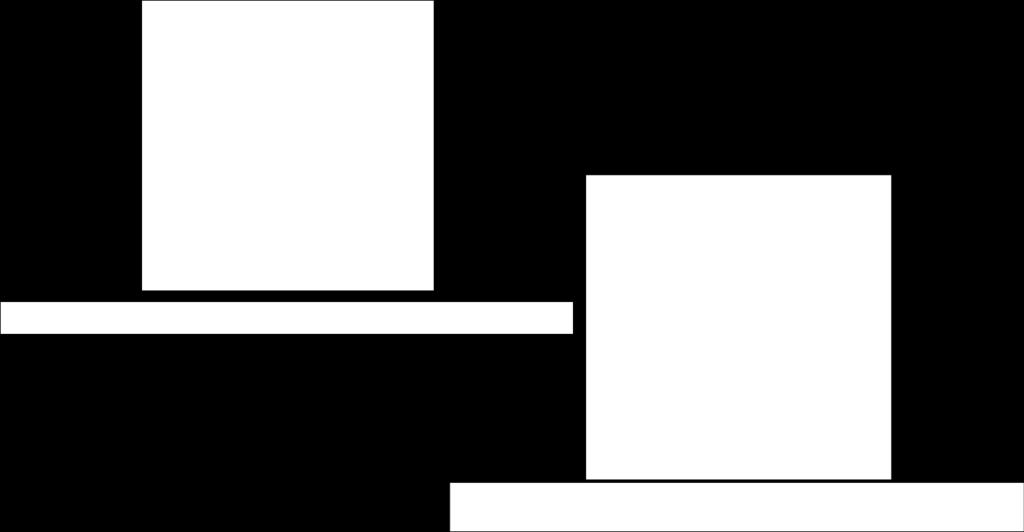
20 Example - 2D Convolution

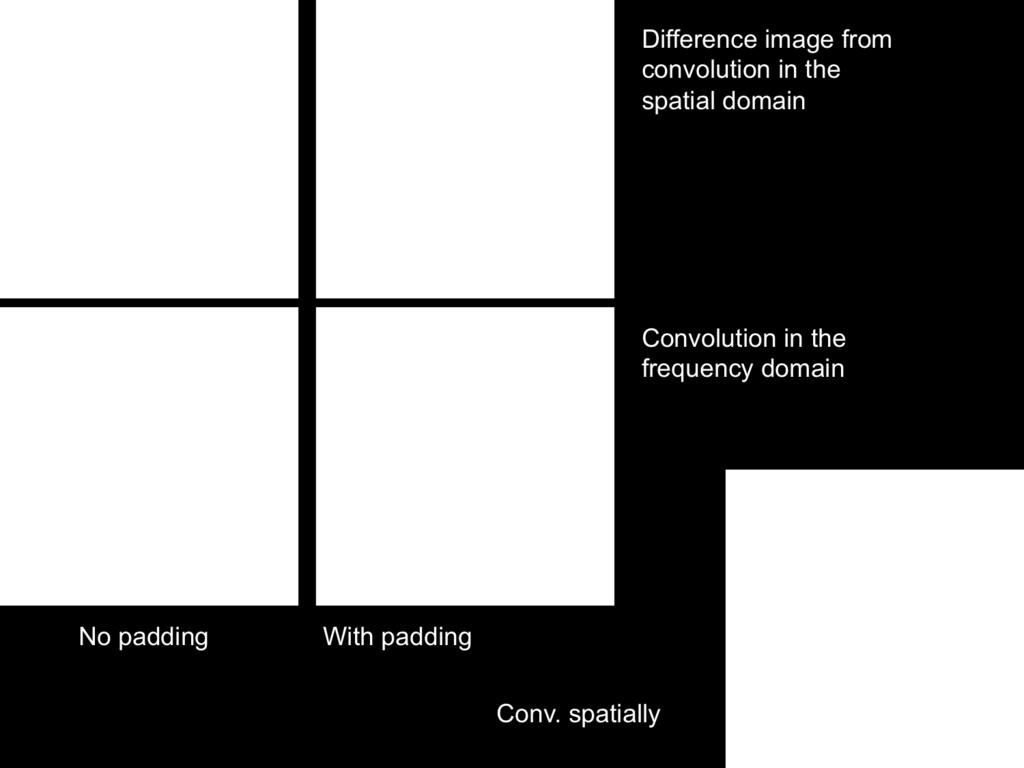
21 Example - 2D Convolution

22 Discrete Cosine Transform

23 Discrete Cosine Transform
24 Discrete Cosine Transform
Digital Signal Processing Lecture 9 - Design of Digital Filters - FIR
 Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
Digital Signal Processing - Design of Digital Filters - FIR Electrical Engineering and Computer Science University of Tennessee, Knoxville November 3, 2015 Overview 1 2 3 4 Roadmap Introduction Discrete-time
Digital Signal Processing Lecture 8 - Filter Design - IIR
 Digital Signal Processing - Filter Design - IIR Electrical Engineering and Computer Science University of Tennessee, Knoxville October 20, 2015 Overview 1 2 3 4 5 6 Roadmap Discrete-time signals and systems
Digital Signal Processing - Filter Design - IIR Electrical Engineering and Computer Science University of Tennessee, Knoxville October 20, 2015 Overview 1 2 3 4 5 6 Roadmap Discrete-time signals and systems
Chap 2. Discrete-Time Signals and Systems
 Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Digital Signal Processing Chap 2. Discrete-Time Signals and Systems Chang-Su Kim Discrete-Time Signals CT Signal DT Signal Representation 0 4 1 1 1 2 3 Functional representation 1, n 1,3 x[ n] 4, n 2 0,
Lecture 19: Discrete Fourier Series
 EE518 Digital Signal Processing University of Washington Autumn 2001 Dept. of Electrical Engineering Lecture 19: Discrete Fourier Series Dec 5, 2001 Prof: J. Bilmes TA: Mingzhou
EE518 Digital Signal Processing University of Washington Autumn 2001 Dept. of Electrical Engineering Lecture 19: Discrete Fourier Series Dec 5, 2001 Prof: J. Bilmes TA: Mingzhou
EE 521: Instrumentation and Measurements
 Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA November 1, 2009 1 / 27 1 The z-transform 2 Linear Time-Invariant System 3 Filter Design IIR Filters FIR Filters
Aly El-Osery Electrical Engineering Department, New Mexico Tech Socorro, New Mexico, USA November 1, 2009 1 / 27 1 The z-transform 2 Linear Time-Invariant System 3 Filter Design IIR Filters FIR Filters
Review of Discrete-Time System
 Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Review of Discrete-Time System Electrical & Computer Engineering University of Maryland, College Park Acknowledgment: ENEE630 slides were based on class notes developed by Profs. K.J. Ray Liu and Min Wu.
Discrete-time signals and systems
 Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
Digital Signal Processing Lecture 3 - Discrete-Time Systems
 Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Discrete Fourier transform (DFT)
") Discrete Fourier transform (DFT) Signal Processing 2008/9 LEA Instituto Superior Técnico Signal Processing LEA (IST) Discrete Fourier transform 1 / 34 Periodic signals Consider a periodic signal x[n] with
Discrete Fourier transform (DFT) Signal Processing 2008/9 LEA Instituto Superior Técnico Signal Processing LEA (IST) Discrete Fourier transform 1 / 34 Periodic signals Consider a periodic signal x[n] with
ECSE 512 Digital Signal Processing I Fall 2010 FINAL EXAMINATION
 FINAL EXAMINATION 9:00 am 12:00 pm, December 20, 2010 Duration: 180 minutes Examiner: Prof. M. Vu Assoc. Examiner: Prof. B. Champagne There are 6 questions for a total of 120 points. This is a closed book
FINAL EXAMINATION 9:00 am 12:00 pm, December 20, 2010 Duration: 180 minutes Examiner: Prof. M. Vu Assoc. Examiner: Prof. B. Champagne There are 6 questions for a total of 120 points. This is a closed book
Lecture 7 Discrete Systems
 Lecture 7 Discrete Systems EE 52: Instrumentation and Measurements Lecture Notes Update on November, 29 Aly El-Osery, Electrical Engineering Dept., New Mexico Tech 7. Contents The z-transform 2 Linear
Lecture 7 Discrete Systems EE 52: Instrumentation and Measurements Lecture Notes Update on November, 29 Aly El-Osery, Electrical Engineering Dept., New Mexico Tech 7. Contents The z-transform 2 Linear
The Z transform (2) 1
 1") The Z transform (2) 1 Today Properties of the region of convergence (3.2) Read examples 3.7, 3.8 Announcements: ELEC 310 FINAL EXAM: April 14 2010, 14:00 pm ECS 123 Assignment 2 due tomorrow by 4:00 pm
The Z transform (2) 1 Today Properties of the region of convergence (3.2) Read examples 3.7, 3.8 Announcements: ELEC 310 FINAL EXAM: April 14 2010, 14:00 pm ECS 123 Assignment 2 due tomorrow by 4:00 pm
Digital Signal Processing. Midterm 1 Solution
 EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
Your solutions for time-domain waveforms should all be expressed as real-valued functions.
 ECE-486 Test 2, Feb 23, 2017 2 Hours; Closed book; Allowed calculator models: (a) Casio fx-115 models (b) HP33s and HP 35s (c) TI-30X and TI-36X models. Calculators not included in this list are not permitted.
ECE-486 Test 2, Feb 23, 2017 2 Hours; Closed book; Allowed calculator models: (a) Casio fx-115 models (b) HP33s and HP 35s (c) TI-30X and TI-36X models. Calculators not included in this list are not permitted.
! Introduction. ! Discrete Time Signals & Systems. ! Z-Transform. ! Inverse Z-Transform. ! Sampling of Continuous Time Signals
 ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
ESE 531: Digital Signal Processing Lec 25: April 24, 2018 Review Course Content! Introduction! Discrete Time Signals & Systems! Discrete Time Fourier Transform! Z-Transform! Inverse Z-Transform! Sampling
Lecture 10. Digital Signal Processing. Chapter 7. Discrete Fourier transform DFT. Mikael Swartling Nedelko Grbic Bengt Mandersson. rev.
 Lecture 10 Digital Signal Processing Chapter 7 Discrete Fourier transform DFT Mikael Swartling Nedelko Grbic Bengt Mandersson rev. 016 Department of Electrical and Information Technology Lund University
Lecture 10 Digital Signal Processing Chapter 7 Discrete Fourier transform DFT Mikael Swartling Nedelko Grbic Bengt Mandersson rev. 016 Department of Electrical and Information Technology Lund University
/ (2π) X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by
 X(e jω ) dω. 4. An 8 point sequence is given by x(n) = {2,2,2,2,1,1,1,1}. Compute 8 point DFT of x(n) by") Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Code No: RR320402 Set No. 1 III B.Tech II Semester Regular Examinations, Apr/May 2006 DIGITAL SIGNAL PROCESSING ( Common to Electronics & Communication Engineering, Electronics & Instrumentation Engineering,
Discrete Time Signals and Systems Time-frequency Analysis. Gloria Menegaz
 Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
Discrete Time Signals and Systems Time-frequency Analysis Gloria Menegaz Time-frequency Analysis Fourier transform (1D and 2D) Reference textbook: Discrete time signal processing, A.W. Oppenheim and R.W.
Definition of Discrete-Time Fourier Transform (DTFT)
") Definition of Discrete-Time ourier Transform (DTT) {x[n]} = X(e jω ) + n= {X(e jω )} = x[n] x[n]e jωn Why use the above awkward notation for the transform? X(e jω )e jωn dω Answer: It is consistent with
Definition of Discrete-Time ourier Transform (DTT) {x[n]} = X(e jω ) + n= {X(e jω )} = x[n] x[n]e jωn Why use the above awkward notation for the transform? X(e jω )e jωn dω Answer: It is consistent with
Discrete Time Fourier Transform
 Discrete Time Fourier Transform Recall that we wrote the sampled signal x s (t) = x(kt)δ(t kt). We calculate its Fourier Transform. We do the following: Ex. Find the Continuous Time Fourier Transform of
Discrete Time Fourier Transform Recall that we wrote the sampled signal x s (t) = x(kt)δ(t kt). We calculate its Fourier Transform. We do the following: Ex. Find the Continuous Time Fourier Transform of
UNIVERSITY OF OSLO. Please make sure that your copy of the problem set is complete before you attempt to answer anything.
 UNIVERSITY OF OSLO Faculty of mathematics and natural sciences Examination in INF3470/4470 Digital signal processing Day of examination: December 9th, 011 Examination hours: 14.30 18.30 This problem set
UNIVERSITY OF OSLO Faculty of mathematics and natural sciences Examination in INF3470/4470 Digital signal processing Day of examination: December 9th, 011 Examination hours: 14.30 18.30 This problem set
New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2015 Final Exam
 New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2015 Name: Solve problems 1 3 and two from problems 4 7. Circle below which two of problems 4 7 you
New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2015 Name: Solve problems 1 3 and two from problems 4 7. Circle below which two of problems 4 7 you
Discrete Time Systems
 1 Discrete Time Systems {x[0], x[1], x[2], } H {y[0], y[1], y[2], } Example: y[n] = 2x[n] + 3x[n-1] + 4x[n-2] 2 FIR and IIR Systems FIR: Finite Impulse Response -- non-recursive y[n] = 2x[n] + 3x[n-1]
1 Discrete Time Systems {x[0], x[1], x[2], } H {y[0], y[1], y[2], } Example: y[n] = 2x[n] + 3x[n-1] + 4x[n-2] 2 FIR and IIR Systems FIR: Finite Impulse Response -- non-recursive y[n] = 2x[n] + 3x[n-1]
Digital Signal Processing. Midterm 2 Solutions
 EE 123 University of California, Berkeley Anant Sahai arch 15, 2007 Digital Signal Processing Instructions idterm 2 Solutions Total time allowed for the exam is 80 minutes Please write your name and SID
EE 123 University of California, Berkeley Anant Sahai arch 15, 2007 Digital Signal Processing Instructions idterm 2 Solutions Total time allowed for the exam is 80 minutes Please write your name and SID
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
! Circular Convolution. " Linear convolution with circular convolution. ! Discrete Fourier Transform. " Linear convolution through circular
 Previously ESE 531: Digital Signal Processing Lec 22: April 18, 2017 Fast Fourier Transform (con t)! Circular Convolution " Linear convolution with circular convolution! Discrete Fourier Transform " Linear
Previously ESE 531: Digital Signal Processing Lec 22: April 18, 2017 Fast Fourier Transform (con t)! Circular Convolution " Linear convolution with circular convolution! Discrete Fourier Transform " Linear
LECTURE NOTES DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13)
") LECTURE NOTES ON DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13) FACULTY : B.V.S.RENUKA DEVI (Asst.Prof) / Dr. K. SRINIVASA RAO (Assoc. Prof) DEPARTMENT OF ELECTRONICS AND COMMUNICATIONS
LECTURE NOTES ON DIGITAL SIGNAL PROCESSING III B.TECH II SEMESTER (JNTUK R 13) FACULTY : B.V.S.RENUKA DEVI (Asst.Prof) / Dr. K. SRINIVASA RAO (Assoc. Prof) DEPARTMENT OF ELECTRONICS AND COMMUNICATIONS
Discrete-Time Fourier Transform (DTFT)
") Discrete-Time Fourier Transform (DTFT) 1 Preliminaries Definition: The Discrete-Time Fourier Transform (DTFT) of a signal x[n] is defined to be X(e jω ) x[n]e jωn. (1) In other words, the DTFT of x[n]
Discrete-Time Fourier Transform (DTFT) 1 Preliminaries Definition: The Discrete-Time Fourier Transform (DTFT) of a signal x[n] is defined to be X(e jω ) x[n]e jωn. (1) In other words, the DTFT of x[n]
Review of Fundamentals of Digital Signal Processing
 Chapter 2 Review of Fundamentals of Digital Signal Processing 2.1 (a) This system is not linear (the constant term makes it non linear) but is shift-invariant (b) This system is linear but not shift-invariant
Chapter 2 Review of Fundamentals of Digital Signal Processing 2.1 (a) This system is not linear (the constant term makes it non linear) but is shift-invariant (b) This system is linear but not shift-invariant
ELEN 4810 Midterm Exam
 ELEN 4810 Midterm Exam Wednesday, October 26, 2016, 10:10-11:25 AM. One sheet of handwritten notes is allowed. No electronics of any kind are allowed. Please record your answers in the exam booklet. Raise
ELEN 4810 Midterm Exam Wednesday, October 26, 2016, 10:10-11:25 AM. One sheet of handwritten notes is allowed. No electronics of any kind are allowed. Please record your answers in the exam booklet. Raise
EC Signals and Systems
 UNIT I CLASSIFICATION OF SIGNALS AND SYSTEMS Continuous time signals (CT signals), discrete time signals (DT signals) Step, Ramp, Pulse, Impulse, Exponential 1. Define Unit Impulse Signal [M/J 1], [M/J
UNIT I CLASSIFICATION OF SIGNALS AND SYSTEMS Continuous time signals (CT signals), discrete time signals (DT signals) Step, Ramp, Pulse, Impulse, Exponential 1. Define Unit Impulse Signal [M/J 1], [M/J
Frequency-Domain C/S of LTI Systems
 Frequency-Domain C/S of LTI Systems x(n) LTI y(n) LTI: Linear Time-Invariant system h(n), the impulse response of an LTI systems describes the time domain c/s. H(ω), the frequency response describes the
Frequency-Domain C/S of LTI Systems x(n) LTI y(n) LTI: Linear Time-Invariant system h(n), the impulse response of an LTI systems describes the time domain c/s. H(ω), the frequency response describes the
Use: Analysis of systems, simple convolution, shorthand for e jw, stability. Motivation easier to write. Or X(z) = Z {x(n)}
 = Z {x(n)}") 1 VI. Z Transform Ch 24 Use: Analysis of systems, simple convolution, shorthand for e jw, stability. A. Definition: X(z) = x(n) z z - transforms Motivation easier to write Or Note if X(z) = Z {x(n)} z
1 VI. Z Transform Ch 24 Use: Analysis of systems, simple convolution, shorthand for e jw, stability. A. Definition: X(z) = x(n) z z - transforms Motivation easier to write Or Note if X(z) = Z {x(n)} z
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A
 DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
DHANALAKSHMI COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING EC2314- DIGITAL SIGNAL PROCESSING UNIT I INTRODUCTION PART A Classification of systems : Continuous and Discrete
EE 224 Signals and Systems I Review 1/10
 EE 224 Signals and Systems I Review 1/10 Class Contents Signals and Systems Continuous-Time and Discrete-Time Time-Domain and Frequency Domain (all these dimensions are tightly coupled) SIGNALS SYSTEMS
EE 224 Signals and Systems I Review 1/10 Class Contents Signals and Systems Continuous-Time and Discrete-Time Time-Domain and Frequency Domain (all these dimensions are tightly coupled) SIGNALS SYSTEMS
Digital Signal Processing:
 Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
Digital Signal Processing: Mathematical and algorithmic manipulation of discretized and quantized or naturally digital signals in order to extract the most relevant and pertinent information that is carried
Chapter 8 The Discrete Fourier Transform
 Chapter 8 The Discrete Fourier Transform Introduction Representation of periodic sequences: the discrete Fourier series Properties of the DFS The Fourier transform of periodic signals Sampling the Fourier
Chapter 8 The Discrete Fourier Transform Introduction Representation of periodic sequences: the discrete Fourier series Properties of the DFS The Fourier transform of periodic signals Sampling the Fourier
Analog vs. discrete signals
 Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Multidimensional digital signal processing
 PSfrag replacements Two-dimensional discrete signals N 1 A 2-D discrete signal (also N called a sequence or array) is a function 2 defined over thex(n set 1 of, n 2 ordered ) pairs of integers: y(nx 1,
PSfrag replacements Two-dimensional discrete signals N 1 A 2-D discrete signal (also N called a sequence or array) is a function 2 defined over thex(n set 1 of, n 2 ordered ) pairs of integers: y(nx 1,
Digital Signal Processing Lecture 4
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
8 The Discrete Fourier Transform (DFT)
") 8 The Discrete Fourier Transform (DFT) ² Discrete-Time Fourier Transform and Z-transform are de ned over in niteduration sequence. Both transforms are functions of continuous variables (ω and z). For nite-duration
8 The Discrete Fourier Transform (DFT) ² Discrete-Time Fourier Transform and Z-transform are de ned over in niteduration sequence. Both transforms are functions of continuous variables (ω and z). For nite-duration
Discrete Fourier Transform
 Discrete Fourier Transform Virtually all practical signals have finite length (e.g., sensor data, audio records, digital images, stock values, etc). Rather than considering such signals to be zero-padded
Discrete Fourier Transform Virtually all practical signals have finite length (e.g., sensor data, audio records, digital images, stock values, etc). Rather than considering such signals to be zero-padded
Signals and Systems. Problem Set: The z-transform and DT Fourier Transform
 Signals and Systems Problem Set: The z-transform and DT Fourier Transform Updated: October 9, 7 Problem Set Problem - Transfer functions in MATLAB A discrete-time, causal LTI system is described by the
Signals and Systems Problem Set: The z-transform and DT Fourier Transform Updated: October 9, 7 Problem Set Problem - Transfer functions in MATLAB A discrete-time, causal LTI system is described by the
UNIT-II Z-TRANSFORM. This expression is also called a one sided z-transform. This non causal sequence produces positive powers of z in X (z).
.") Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Review of Fundamentals of Digital Signal Processing
 Solution Manual for Theory and Applications of Digital Speech Processing by Lawrence Rabiner and Ronald Schafer Click here to Purchase full Solution Manual at http://solutionmanuals.info Link download
Solution Manual for Theory and Applications of Digital Speech Processing by Lawrence Rabiner and Ronald Schafer Click here to Purchase full Solution Manual at http://solutionmanuals.info Link download
Grades will be determined by the correctness of your answers (explanations are not required).
.") 6.00 (Fall 20) Final Examination December 9, 20 Name: Kerberos Username: Please circle your section number: Section Time 2 am pm 4 2 pm Grades will be determined by the correctness of your answers (explanations
6.00 (Fall 20) Final Examination December 9, 20 Name: Kerberos Username: Please circle your section number: Section Time 2 am pm 4 2 pm Grades will be determined by the correctness of your answers (explanations
ECE 301. Division 2, Fall 2006 Instructor: Mimi Boutin Midterm Examination 3
 ECE 30 Division 2, Fall 2006 Instructor: Mimi Boutin Midterm Examination 3 Instructions:. Wait for the BEGIN signal before opening this booklet. In the meantime, read the instructions below and fill out
ECE 30 Division 2, Fall 2006 Instructor: Mimi Boutin Midterm Examination 3 Instructions:. Wait for the BEGIN signal before opening this booklet. In the meantime, read the instructions below and fill out
Signals and Systems Profs. Byron Yu and Pulkit Grover Fall Midterm 2 Solutions
 8-90 Signals and Systems Profs. Byron Yu and Pulkit Grover Fall 08 Midterm Solutions Name: Andrew ID: Problem Score Max 8 5 3 6 4 7 5 8 6 7 6 8 6 9 0 0 Total 00 Midterm Solutions. (8 points) Indicate whether
8-90 Signals and Systems Profs. Byron Yu and Pulkit Grover Fall 08 Midterm Solutions Name: Andrew ID: Problem Score Max 8 5 3 6 4 7 5 8 6 7 6 8 6 9 0 0 Total 00 Midterm Solutions. (8 points) Indicate whether
Digital Signal Processing. Lecture Notes and Exam Questions DRAFT
 Digital Signal Processing Lecture Notes and Exam Questions Convolution Sum January 31, 2006 Convolution Sum of Two Finite Sequences Consider convolution of h(n) and g(n) (M>N); y(n) = h(n), n =0... M 1
Digital Signal Processing Lecture Notes and Exam Questions Convolution Sum January 31, 2006 Convolution Sum of Two Finite Sequences Consider convolution of h(n) and g(n) (M>N); y(n) = h(n), n =0... M 1
Voiced Speech. Unvoiced Speech
 Digital Speech Processing Lecture 2 Homomorphic Speech Processing General Discrete-Time Model of Speech Production p [ n] = p[ n] h [ n] Voiced Speech L h [ n] = A g[ n] v[ n] r[ n] V V V p [ n ] = u [
Digital Speech Processing Lecture 2 Homomorphic Speech Processing General Discrete-Time Model of Speech Production p [ n] = p[ n] h [ n] Voiced Speech L h [ n] = A g[ n] v[ n] r[ n] V V V p [ n ] = u [
ECE-700 Review. Phil Schniter. January 5, x c (t)e jωt dt, x[n]z n, Denoting a transform pair by x[n] X(z), some useful properties are
![ECE-700 Review. Phil Schniter. January 5, x c (t)e jωt dt, x[n]z n, Denoting a transform pair by x[n] X(z), some useful properties are](/thumbs/89/98815129.jpg "ECE-700 Review. Phil Schniter. January 5, x c (t)e jωt dt, x[n]z n, Denoting a transform pair by x[n] X(z), some useful properties are") ECE-7 Review Phil Schniter January 5, 7 ransforms Using x c (t) to denote a continuous-time signal at time t R, Laplace ransform: X c (s) x c (t)e st dt, s C Continuous-ime Fourier ransform (CF): ote that:
ECE-7 Review Phil Schniter January 5, 7 ransforms Using x c (t) to denote a continuous-time signal at time t R, Laplace ransform: X c (s) x c (t)e st dt, s C Continuous-ime Fourier ransform (CF): ote that:
Chapter 7: The z-transform
 Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
E : Lecture 1 Introduction
 E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
E85.2607: Lecture 1 Introduction 1 Administrivia 2 DSP review 3 Fun with Matlab E85.2607: Lecture 1 Introduction 2010-01-21 1 / 24 Course overview Advanced Digital Signal Theory Design, analysis, and implementation
ECE 301 Division 1, Fall 2008 Instructor: Mimi Boutin Final Examination Instructions:
 ECE 30 Division, all 2008 Instructor: Mimi Boutin inal Examination Instructions:. Wait for the BEGIN signal before opening this booklet. In the meantime, read the instructions below and fill out the requested
ECE 30 Division, all 2008 Instructor: Mimi Boutin inal Examination Instructions:. Wait for the BEGIN signal before opening this booklet. In the meantime, read the instructions below and fill out the requested
Digital Filters Ying Sun
 Digital Filters Ying Sun Digital filters Finite impulse response (FIR filter: h[n] has a finite numbers of terms. Infinite impulse response (IIR filter: h[n] has infinite numbers of terms. Causal filter:
Digital Filters Ying Sun Digital filters Finite impulse response (FIR filter: h[n] has a finite numbers of terms. Infinite impulse response (IIR filter: h[n] has infinite numbers of terms. Causal filter:
Digital Signal Processing IIR Filter Design via Bilinear Transform
 Digital Signal Processing IIR Filter Design via Bilinear Transform D. Richard Brown III D. Richard Brown III 1 / 12 Basic Procedure We assume here that we ve already decided to use an IIR filter. The basic
Digital Signal Processing IIR Filter Design via Bilinear Transform D. Richard Brown III D. Richard Brown III 1 / 12 Basic Procedure We assume here that we ve already decided to use an IIR filter. The basic
Grades will be determined by the correctness of your answers (explanations are not required).
.") 6.00 (Fall 2011) Final Examination December 19, 2011 Name: Kerberos Username: Please circle your section number: Section Time 2 11 am 1 pm 4 2 pm Grades will be determined by the correctness of your answers
6.00 (Fall 2011) Final Examination December 19, 2011 Name: Kerberos Username: Please circle your section number: Section Time 2 11 am 1 pm 4 2 pm Grades will be determined by the correctness of your answers
Signals & Systems Handout #4
 Signals & Systems Handout #4 H-4. Elementary Discrete-Domain Functions (Sequences): Discrete-domain functions are defined for n Z. H-4.. Sequence Notation: We use the following notation to indicate the
Signals & Systems Handout #4 H-4. Elementary Discrete-Domain Functions (Sequences): Discrete-domain functions are defined for n Z. H-4.. Sequence Notation: We use the following notation to indicate the
APPLIED SIGNAL PROCESSING
 APPLIED SIGNAL PROCESSING DIGITAL FILTERS Digital filters are discrete-time linear systems { x[n] } G { y[n] } Impulse response: y[n] = h[0]x[n] + h[1]x[n 1] + 2 DIGITAL FILTER TYPES FIR (Finite Impulse
APPLIED SIGNAL PROCESSING DIGITAL FILTERS Digital filters are discrete-time linear systems { x[n] } G { y[n] } Impulse response: y[n] = h[0]x[n] + h[1]x[n 1] + 2 DIGITAL FILTER TYPES FIR (Finite Impulse
DEPARTMENT OF EI DIGITAL SIGNAL PROCESSING ASSIGNMENT 1
 This PDF is Created by Simpo PDF Creator unregistered version - http://wwwsimpopdfcom Study hard, for the well is deep, and our brains are shallow DEPARTMENT OF EI DIGITAL SIGNAL PROCESSING ASSIGNMENT
This PDF is Created by Simpo PDF Creator unregistered version - http://wwwsimpopdfcom Study hard, for the well is deep, and our brains are shallow DEPARTMENT OF EI DIGITAL SIGNAL PROCESSING ASSIGNMENT
ECE 413 Digital Signal Processing Midterm Exam, Spring Instructions:
 University of Waterloo Department of Electrical and Computer Engineering ECE 4 Digital Signal Processing Midterm Exam, Spring 00 June 0th, 00, 5:0-6:50 PM Instructor: Dr. Oleg Michailovich Student s name:
University of Waterloo Department of Electrical and Computer Engineering ECE 4 Digital Signal Processing Midterm Exam, Spring 00 June 0th, 00, 5:0-6:50 PM Instructor: Dr. Oleg Michailovich Student s name:
Solutions. Number of Problems: 10
 Final Exam February 2nd, 2013 Signals & Systems (151-0575-01) Prof. R. D Andrea Solutions Exam Duration: 150 minutes Number of Problems: 10 Permitted aids: One double-sided A4 sheet. Questions can be answered
Final Exam February 2nd, 2013 Signals & Systems (151-0575-01) Prof. R. D Andrea Solutions Exam Duration: 150 minutes Number of Problems: 10 Permitted aids: One double-sided A4 sheet. Questions can be answered
Z Transform (Part - II)
") Z Transform (Part - II). The Z Transform of the following real exponential sequence x(nt) = a n, nt 0 = 0, nt < 0, a > 0 (a) ; z > (c) for all z z (b) ; z (d) ; z < a > a az az Soln. The given sequence
Z Transform (Part - II). The Z Transform of the following real exponential sequence x(nt) = a n, nt 0 = 0, nt < 0, a > 0 (a) ; z > (c) for all z z (b) ; z (d) ; z < a > a az az Soln. The given sequence
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 30, 2018 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 30, 2018 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
DISCRETE-TIME SIGNAL PROCESSING
 THIRD EDITION DISCRETE-TIME SIGNAL PROCESSING ALAN V. OPPENHEIM MASSACHUSETTS INSTITUTE OF TECHNOLOGY RONALD W. SCHÄFER HEWLETT-PACKARD LABORATORIES Upper Saddle River Boston Columbus San Francisco New
THIRD EDITION DISCRETE-TIME SIGNAL PROCESSING ALAN V. OPPENHEIM MASSACHUSETTS INSTITUTE OF TECHNOLOGY RONALD W. SCHÄFER HEWLETT-PACKARD LABORATORIES Upper Saddle River Boston Columbus San Francisco New
Overview of Discrete-Time Fourier Transform Topics Handy Equations Handy Limits Orthogonality Defined orthogonal
 Overview of Discrete-Time Fourier Transform Topics Handy equations and its Definition Low- and high- discrete-time frequencies Convergence issues DTFT of complex and real sinusoids Relationship to LTI
Overview of Discrete-Time Fourier Transform Topics Handy equations and its Definition Low- and high- discrete-time frequencies Convergence issues DTFT of complex and real sinusoids Relationship to LTI
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
ESE 531: Digital Signal Processing Lec 6: January 31, 2017 Inverse z-transform Lecture Outline! z-transform " Tie up loose ends " Regions of convergence properties! Inverse z-transform " Inspection " Partial
R13 SET - 1
 R13 SET - 1 III B. Tech II Semester Regular Examinations, April - 2016 DIGITAL SIGNAL PROCESSING (Electronics and Communication Engineering) Time: 3 hours Maximum Marks: 70 Note: 1. Question Paper consists
R13 SET - 1 III B. Tech II Semester Regular Examinations, April - 2016 DIGITAL SIGNAL PROCESSING (Electronics and Communication Engineering) Time: 3 hours Maximum Marks: 70 Note: 1. Question Paper consists
Signals and Systems. Spring Room 324, Geology Palace, ,
 Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
Signals and Systems Spring 2013 Room 324, Geology Palace, 13756569051, zhukaiguang@jlu.edu.cn Chapter 10 The Z-Transform 1) Z-Transform 2) Properties of the ROC of the z-transform 3) Inverse z-transform
Chap 4. Sampling of Continuous-Time Signals
 Digital Signal Processing Chap 4. Sampling of Continuous-Time Signals Chang-Su Kim Digital Processing of Continuous-Time Signals Digital processing of a CT signal involves three basic steps 1. Conversion
Digital Signal Processing Chap 4. Sampling of Continuous-Time Signals Chang-Su Kim Digital Processing of Continuous-Time Signals Digital processing of a CT signal involves three basic steps 1. Conversion
Question Bank. UNIT 1 Part-A
 FATIMA MICHAEL COLLEGE OF ENGINEERING & TECHNOLOGY Senkottai Village, Madurai Sivagangai Main Road, Madurai -625 020 An ISO 9001:2008 Certified Institution Question Bank DEPARTMENT OF ELECTRONICS AND COMMUNICATION
FATIMA MICHAEL COLLEGE OF ENGINEERING & TECHNOLOGY Senkottai Village, Madurai Sivagangai Main Road, Madurai -625 020 An ISO 9001:2008 Certified Institution Question Bank DEPARTMENT OF ELECTRONICS AND COMMUNICATION
VALLIAMMAI ENGINEERING COLLEGE. SRM Nagar, Kattankulathur DEPARTMENT OF INFORMATION TECHNOLOGY. Academic Year
 VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur- 603 203 DEPARTMENT OF INFORMATION TECHNOLOGY Academic Year 2016-2017 QUESTION BANK-ODD SEMESTER NAME OF THE SUBJECT SUBJECT CODE SEMESTER YEAR
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur- 603 203 DEPARTMENT OF INFORMATION TECHNOLOGY Academic Year 2016-2017 QUESTION BANK-ODD SEMESTER NAME OF THE SUBJECT SUBJECT CODE SEMESTER YEAR
Lecture 19 IIR Filters
 Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Lecture 19 IIR Filters Fundamentals of Digital Signal Processing Spring, 2012 Wei-Ta Chu 2012/5/10 1 General IIR Difference Equation IIR system: infinite-impulse response system The most general class
Discrete-Time David Johns and Ken Martin University of Toronto
 Discrete-Time David Johns and Ken Martin University of Toronto (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) University of Toronto 1 of 40 Overview of Some Signal Spectra x c () t st () x s () t xn
Discrete-Time David Johns and Ken Martin University of Toronto (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) University of Toronto 1 of 40 Overview of Some Signal Spectra x c () t st () x s () t xn
Multimedia Signals and Systems - Audio and Video. Signal, Image, Video Processing Review-Introduction, MP3 and MPEG2
 Multimedia Signals and Systems - Audio and Video Signal, Image, Video Processing Review-Introduction, MP3 and MPEG2 Kunio Takaya Electrical and Computer Engineering University of Saskatchewan December
Multimedia Signals and Systems - Audio and Video Signal, Image, Video Processing Review-Introduction, MP3 and MPEG2 Kunio Takaya Electrical and Computer Engineering University of Saskatchewan December
-Digital Signal Processing- FIR Filter Design. Lecture May-16
 -Digital Signal Processing- FIR Filter Design Lecture-17 24-May-16 FIR Filter Design! FIR filters can also be designed from a frequency response specification.! The equivalent sampled impulse response
-Digital Signal Processing- FIR Filter Design Lecture-17 24-May-16 FIR Filter Design! FIR filters can also be designed from a frequency response specification.! The equivalent sampled impulse response
Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section The (DT) Fourier transform (or spectrum) of x[n] is
![Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section The (DT) Fourier transform (or spectrum) of x[n] is](/thumbs/89/98498368.jpg "Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section The (DT) Fourier transform (or spectrum) of x[n] is") Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section 5. 3 The (DT) Fourier transform (or spectrum) of x[n] is X ( e jω) = n= x[n]e jωn x[n] can be reconstructed from its
Discrete-time Fourier transform (DTFT) representation of DT aperiodic signals Section 5. 3 The (DT) Fourier transform (or spectrum) of x[n] is X ( e jω) = n= x[n]e jωn x[n] can be reconstructed from its
Definition. A signal is a sequence of numbers. sequence is also referred to as being in l 1 (Z), or just in l 1. A sequence {x(n)} satisfying
, or just in l 1. A sequence {x(n)} satisfying") Signals and Systems. Definition. A signal is a sequence of numbers {x(n)} n Z satisfying n Z x(n)
Signals and Systems. Definition. A signal is a sequence of numbers {x(n)} n Z satisfying n Z x(n)
The Johns Hopkins University Department of Electrical and Computer Engineering Introduction to Linear Systems Fall 2002.
 The Johns Hopkins University Department of Electrical and Computer Engineering 505.460 Introduction to Linear Systems Fall 2002 Final exam Name: You are allowed to use: 1. Table 3.1 (page 206) & Table
The Johns Hopkins University Department of Electrical and Computer Engineering 505.460 Introduction to Linear Systems Fall 2002 Final exam Name: You are allowed to use: 1. Table 3.1 (page 206) & Table
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 8: February 12th, 2019 Sampling and Reconstruction Lecture Outline! Review " Ideal sampling " Frequency response of sampled signal " Reconstruction " Anti-aliasing
ESE 531: Digital Signal Processing Lec 8: February 12th, 2019 Sampling and Reconstruction Lecture Outline! Review " Ideal sampling " Frequency response of sampled signal " Reconstruction " Anti-aliasing
Discrete-Time Signals and Systems
 ECE 46 Lec Viewgraph of 35 Discrete-Time Signals and Systems Sequences: x { x[ n] }, < n
ECE 46 Lec Viewgraph of 35 Discrete-Time Signals and Systems Sequences: x { x[ n] }, < n
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 22: April 10, 2018 Adaptive Filters Penn ESE 531 Spring 2018 Khanna Lecture Outline! Circular convolution as linear convolution with aliasing! Adaptive Filters Penn
ESE 531: Digital Signal Processing Lec 22: April 10, 2018 Adaptive Filters Penn ESE 531 Spring 2018 Khanna Lecture Outline! Circular convolution as linear convolution with aliasing! Adaptive Filters Penn
EEE4001F EXAM DIGITAL SIGNAL PROCESSING. University of Cape Town Department of Electrical Engineering PART A. June hours.
 EEE400F EXAM DIGITAL SIGNAL PROCESSING PART A Basic digital signal processing theory.. A sequencex[n] has a zero-phase DTFT X(e jω ) given below: X(e jω ) University of Cape Town Department of Electrical
EEE400F EXAM DIGITAL SIGNAL PROCESSING PART A Basic digital signal processing theory.. A sequencex[n] has a zero-phase DTFT X(e jω ) given below: X(e jω ) University of Cape Town Department of Electrical
Department of Electrical and Computer Engineering Digital Speech Processing Homework No. 6 Solutions
 Problem 1 Department of Electrical and Computer Engineering Digital Speech Processing Homework No. 6 Solutions The complex cepstrum, ˆx[n], of a sequence x[n] is the inverse Fourier transform of the complex
Problem 1 Department of Electrical and Computer Engineering Digital Speech Processing Homework No. 6 Solutions The complex cepstrum, ˆx[n], of a sequence x[n] is the inverse Fourier transform of the complex
Lecture 7 - IIR Filters
 Lecture 7 - IIR Filters James Barnes (James.Barnes@colostate.edu) Spring 204 Colorado State University Dept of Electrical and Computer Engineering ECE423 / 2 Outline. IIR Filter Representations Difference
Lecture 7 - IIR Filters James Barnes (James.Barnes@colostate.edu) Spring 204 Colorado State University Dept of Electrical and Computer Engineering ECE423 / 2 Outline. IIR Filter Representations Difference
Discrete Time Systems
 Discrete Time Systems Valentina Hubeika, Jan Černocký DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz 1 LTI systems In this course, we work only with linear and time-invariant systems. We talked about
Discrete Time Systems Valentina Hubeika, Jan Černocký DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz 1 LTI systems In this course, we work only with linear and time-invariant systems. We talked about
VU Signal and Image Processing
 052600 VU Signal and Image Processing Torsten Möller + Hrvoje Bogunović + Raphael Sahann torsten.moeller@univie.ac.at hrvoje.bogunovic@meduniwien.ac.at raphael.sahann@univie.ac.at vda.cs.univie.ac.at/teaching/sip/18s/
052600 VU Signal and Image Processing Torsten Möller + Hrvoje Bogunović + Raphael Sahann torsten.moeller@univie.ac.at hrvoje.bogunovic@meduniwien.ac.at raphael.sahann@univie.ac.at vda.cs.univie.ac.at/teaching/sip/18s/
Today. ESE 531: Digital Signal Processing. IIR Filter Design. Impulse Invariance. Impulse Invariance. Impulse Invariance. ω < π.
 Today ESE 53: Digital Signal Processing! IIR Filter Design " Lec 8: March 30, 207 IIR Filters and Adaptive Filters " Bilinear Transformation! Transformation of DT Filters! Adaptive Filters! LMS Algorithm
Today ESE 53: Digital Signal Processing! IIR Filter Design " Lec 8: March 30, 207 IIR Filters and Adaptive Filters " Bilinear Transformation! Transformation of DT Filters! Adaptive Filters! LMS Algorithm
EE 225D LECTURE ON DIGITAL FILTERS. University of California Berkeley
 University of California Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences Professors : N.Morgan / B.Gold EE225D Digital Filters Spring,1999 Lecture 7 N.MORGAN
University of California Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences Professors : N.Morgan / B.Gold EE225D Digital Filters Spring,1999 Lecture 7 N.MORGAN
DSP Algorithm Original PowerPoint slides prepared by S. K. Mitra
 Chapter 11 DSP Algorithm Implementations 清大電機系林嘉文 cwlin@ee.nthu.edu.tw Original PowerPoint slides prepared by S. K. Mitra 03-5731152 11-1 Matrix Representation of Digital Consider Filter Structures This
Chapter 11 DSP Algorithm Implementations 清大電機系林嘉文 cwlin@ee.nthu.edu.tw Original PowerPoint slides prepared by S. K. Mitra 03-5731152 11-1 Matrix Representation of Digital Consider Filter Structures This
 DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
Each problem is worth 25 points, and you may solve the problems in any order.
 EE 120: Signals & Systems Department of Electrical Engineering and Computer Sciences University of California, Berkeley Midterm Exam #2 April 11, 2016, 2:10-4:00pm Instructions: There are four questions
EE 120: Signals & Systems Department of Electrical Engineering and Computer Sciences University of California, Berkeley Midterm Exam #2 April 11, 2016, 2:10-4:00pm Instructions: There are four questions
Lecture 4: FT Pairs, Random Signals and z-transform
 EE518 Digital Signal Processing University of Washington Autumn 2001 Dept. of Electrical Engineering Lecture 4: T Pairs, Rom Signals z-transform Wed., Oct. 10, 2001 Prof: J. Bilmes
EE518 Digital Signal Processing University of Washington Autumn 2001 Dept. of Electrical Engineering Lecture 4: T Pairs, Rom Signals z-transform Wed., Oct. 10, 2001 Prof: J. Bilmes
SIDDHARTH GROUP OF INSTITUTIONS:: PUTTUR Siddharth Nagar, Narayanavanam Road QUESTION BANK (DESCRIPTIVE)
") SIDDHARTH GROUP OF INSTITUTIONS:: PUTTUR Siddharth Nagar, Narayanavanam Road 517583 QUESTION BANK (DESCRIPTIVE) Subject with Code : Digital Signal Processing(16EC422) Year & Sem: III-B.Tech & II-Sem Course
SIDDHARTH GROUP OF INSTITUTIONS:: PUTTUR Siddharth Nagar, Narayanavanam Road 517583 QUESTION BANK (DESCRIPTIVE) Subject with Code : Digital Signal Processing(16EC422) Year & Sem: III-B.Tech & II-Sem Course
Final Exam of ECE301, Section 1 (Prof. Chih-Chun Wang) 1 3pm, Friday, December 13, 2016, EE 129.
 1 3pm, Friday, December 13, 2016, EE 129.") Final Exam of ECE301, Section 1 (Prof. Chih-Chun Wang) 1 3pm, Friday, December 13, 2016, EE 129. 1. Please make sure that it is your name printed on the exam booklet. Enter your student ID number, and
Final Exam of ECE301, Section 1 (Prof. Chih-Chun Wang) 1 3pm, Friday, December 13, 2016, EE 129. 1. Please make sure that it is your name printed on the exam booklet. Enter your student ID number, and
ECGR4124 Digital Signal Processing Final Spring 2009
 ECGR4124 Digital Signal Processing Final Spring 2009 Name: LAST 4 NUMBERS of Student Number: Do NOT begin until told to do so Make sure that you have all pages before starting Open book, 2 sheet front/back
ECGR4124 Digital Signal Processing Final Spring 2009 Name: LAST 4 NUMBERS of Student Number: Do NOT begin until told to do so Make sure that you have all pages before starting Open book, 2 sheet front/back
UNIVERSITY OF OSLO. Faculty of mathematics and natural sciences. Forslag til fasit, versjon-01: Problem 1 Signals and systems.
 UNIVERSITY OF OSLO Faculty of mathematics and natural sciences Examination in INF3470/4470 Digital signal processing Day of examination: December 1th, 016 Examination hours: 14:30 18.30 This problem set
UNIVERSITY OF OSLO Faculty of mathematics and natural sciences Examination in INF3470/4470 Digital signal processing Day of examination: December 1th, 016 Examination hours: 14:30 18.30 This problem set
Signals and Systems Spring 2004 Lecture #9
 Signals and Systems Spring 2004 Lecture #9 (3/4/04). The convolution Property of the CTFT 2. Frequency Response and LTI Systems Revisited 3. Multiplication Property and Parseval s Relation 4. The DT Fourier
Signals and Systems Spring 2004 Lecture #9 (3/4/04). The convolution Property of the CTFT 2. Frequency Response and LTI Systems Revisited 3. Multiplication Property and Parseval s Relation 4. The DT Fourier
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science. Fall Solutions for Problem Set 2
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science Issued: Tuesday, September 5. 6.: Discrete-Time Signal Processing Fall 5 Solutions for Problem Set Problem.
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science Issued: Tuesday, September 5. 6.: Discrete-Time Signal Processing Fall 5 Solutions for Problem Set Problem.
Signals and Systems Lecture 8: Z Transform
 Signals and Systems Lecture 8: Z Transform Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 Farzaneh Abdollahi Signal and Systems Lecture 8 1/29 Introduction
Signals and Systems Lecture 8: Z Transform Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Winter 2012 Farzaneh Abdollahi Signal and Systems Lecture 8 1/29 Introduction