Segmentation of Subspace Arrangements III Robust GPCA
|
|
|
- Junior Griffith
- 6 years ago
- Views:
Transcription
1 Segmentation of Subspace Arrangements III Robust GPCA Berkeley CS 294-6, Lecture 25 Dec. 3, 2006
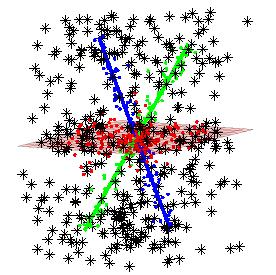
2 Generalized Principal Component Analysis (GPCA): (an overview) x V 1 V 2 (x 3 = 0)or(x 1 = x 2 = 0) {x 1x 3 = 0, x 2x 3 = 0}. Veronese Map: Given N samples x 1,..., x N R 3, x3 V2 R 3 V1. L 2 = [ν2(x 1),..., ν 2(x N )] R M[3] 2 N (x 1 ) 2 (x 1 x 2 ) (x = 1 x 3 ) (x 2 ) 2 (x 2 x 3 ) (x 3 ) 2 x1 x2 c1 = [0, 0, 1, 0, 0, 0] The null space of L 2 is c 2 = [0, 0, 0, 0, 1, 0] p1 = c1ν2(x) = x1x3 p 2 = c 2ν 2(x) = x 2x 3 P(x) =. [p 1(x) p 2(x)] = [ [x 1x 3, x 2x 3], then x3 ] 0 xp = [ xp 1 xp 2 ] = 0 x 3 x 1 x 2. xp at one sample per subspace gives normal vectors that span V 1 and V 2 : [ x = [a, b, 0] T 0 0 ] V 1 xp x = 0 0 V 1. a b Segment samples and recover V 1 and V 2. y = [0, 0, c] T V 2 xp y = [ c 0 0 c 0 0 ] V 2.
3 1 Multibody Epipolar Constraint Multibody Fundamental Matrix 2 GPCA-Voting Noise issue GPCA-Voting Comparison 3 Robust GPCA Outlier Issue Robustifying GPCA via Influence and MVT Comparison 4 Applications Affine Motion Detection Vanishing-Point Detection 5 Conclusion and Discussion Conclusion Future Directions
4 Multibody Fundamental Matrix Given K rigid bodies, an image correspondence (x 1, x 2) satisfies: f (x 1, x 2) = (x T 2 F1x1)(xT 2 F2x1) (xt 2 F K x 1) = 0. Using the kronecker product: f (x 1, x 2) = {(x 1 x 2) T F s 1 } {(x1 x2)t F s K }. We treat z = x 1 x 2 R 9 as the new feature vector, then f (x 1, x 2) = ν K (z) T c. A second way to rewrite the bilinear constraint: f (x 1, x 2) is a linear constraint with respect to x 1 and x 2, respectively: f (x 1, x 2) = f x2 (x 1) = c T x 2 ν K (x 1); f (x 1, x 2) = f x1 (x 2) = c T x 1 ν K (x 2). Hence, f (x 1, x 2) can be rewritten by applying the Veronese map individually: Which representation is more compact? 1 K = 2: For c, M [9] 2 = ( f (x 1, x 2) = ν K (x 2) T Fν K (x 1), where F R M[3] K M[3] K. ) = 45. For F, (M [3] 2 )2 = 6 2 = K = 4: For c, M [9] 4 = 495. For F, (M [3] 4 )2 = 15 2 = 225. Choose the second one. F is called the multibody fundamental matrix, comparing to the (single) fundamental matrix F.
 = ( K ) i=1 j i xt 2 F j x 1 (F i x 1). ( ) Suppose (x 1, x 2) on Object k, then j i xt 2 F j x 1 = 0 for all i k: f (x 1, x 2) = x T 2 x F j x 1 (F k x 1) (F k x 1) l 2 k.")
5 Segmentation of Multibody Motion The vanishing polynomial f (x 1, x 2) is solved as the following: f (x 1, x 2) = ν K (x 2) T Fν K (x 1) = (ν K (x 1) ν K (x 2)) T F s. x f (x 2 1, x 2) = ( K ) i=1 j i xt 2 F j x 1 (F i x 1). ( ) Suppose (x 1, x 2) on Object k, then j i xt 2 F j x 1 = 0 for all i k: f (x 1, x 2) = x T 2 x F j x 1 (F k x 1) (F k x 1) l 2 k. 2 j k Hence, x 2 f (x 1, x 2) l 2 k e2 k. Given K rigid body motions, there exist K different epipoles e 1,, e K in the second view such that: which is a standard subspace-segmentation problem. (e T 1 l)(et 2 l) (et K l) = 0,
6 PDA on noisy data GPCA-Voting: A Stable Implementation V1 V2 R D νn(x) = R M[D] n R M[D] n p(x) = c T x Null(Ln) x = = R D V1 V2 The noise affects the algebraic PDA process: 1 The data matrix L K (V ) is always full-rank. Solution: Use SVD to estimate Null(L K ). 2 How to choose one point per subspace as the representative? Solution: Rule of thumb is to pick samples far away from the origin and intersections. 3 Even with a good sample, evaluation of P is still perturbed away from the true position. Solution: We propose a voting algorithm to evaluate P at all samples.
7 A Voting Scheme Goal: 1 Averaging xp at more samples of a subspace. 2 Recover correct rank of xp. Difficulty: Do not know which samples belong to the same subspace, yet. GPCA-Voting (a simple example) 1 Assume subspaces (2, 1, 1) in R 3. 2 h I (3) = 4 vanishing polynomials xp R Vote on rank-1 & rank-2 codimensions with a tolerance threshold τ 4 Average normal vectors associated with highest votes. 5 (optional) Iteratively refine the segmentation via EM or K-Subspaces.
 16% (a) 8% (b) 12% (c) 16% Figure: (2, 1, 1) R")


 in R 5 53% 57% 39.8% 5.")
8 Simulation Results 1 Illustrations (a) 8% (b) 12% (c) 16% (a) 8% (b) 12% (c) 16% Figure: (2, 1, 1) R 3. Figure: (2, 2, 1) R 3. 2 Segmentation simulations Table: Segmentation errors. 4% Gaussian noise is added. Subspace Dimensions EM K-Subspaces PDA Voting Voting+K-Subspaces (2, 2, 1) in R 3 29% 27% 13.2% 6.4% 5.4% (4, 2, 2, 1) in R 5 53% 57% 39.8% 5.7% 5.7% (4, 4, 4, 4) in R 5 20% 25% 25.3% 17% 11%
![Outlier Issue GPCA process: V1 V2 R D νn(x) = R M[D] n R M[D] n p(x) = c T x Null(Ln) x = = V1 V2 R D Rank(Ln) = M n [D] hi (n) Breakdown of GPCA is 0% because breakdown of PCA is 0%:](/docs-images/80/81213231/images/9-0.jpg "a large outlier can arbitrarily perturb Null(L n) V2 R D R M[D] n R M[D] n V1 νn(x) = Null(Ln) = p(x) = c T x Seek a robust PCA to estimate Null(L n), where L n = [ν n(x 1),, ν n(x N")
9 Outlier Issue GPCA process: V1 V2 R D νn(x) = R M[D] n R M[D] n p(x) = c T x Null(Ln) x = = V1 V2 R D Rank(Ln) = M n [D] hi (n) Breakdown of GPCA is 0% because breakdown of PCA is 0%: a large outlier can arbitrarily perturb Null(L n) V2 R D R M[D] n R M[D] n V1 νn(x) = Null(Ln) = p(x) = c T x Seek a robust PCA to estimate Null(L n), where L n = [ν n(x 1),, ν n(x N )].

![[Huber 1981, Campbell 1980] multivariate trimming (MVT): [Ganadesikan & Kettenring 1972] 2](/docs-images/80/81213231/images/10-2.jpg "Influence-based: large influence on model parameters.")

10 Three approaches to tackle outliers: 1 Probability-based: small-probability samples. Probability plots: [Healy 1968, Cox 1968] PCs: [Rao 1964, Ganadesikan & Kettenring 1972] M-estimators: [Huber 1981, Campbell 1980] multivariate trimming (MVT): [Ganadesikan & Kettenring 1972] 2 Influence-based: large influence on model parameters. Parameter difference with and without a sample: [Hampel et al. 1986, Critchley 1985] 3 Consensus-based: not consistent with models of high consensus. Hough: [Ballard 1981, Lowe 1999] RANSAC: [Fischler & Bolles 1981, Torr 1997] Least Median Estimate (LME): [Rousseeuw 1984, Steward 1999]
11 Robust GPCA STEP 1: Given the outlier percentage α%, robustify PCA: Influence function: 1 Compute null space C = {c 1, c 2,..., c m} for L n = [ν n(x 1) ν n(x N )]. 2 For x i, compute C (i) for L (i) n = [ν n(x 1) î ν n(x N )]. 3 I (x i ). = C, C (i). 4 Reject top α% samples with highest influence. Multivariate-trimming (MVT): Assuming a Gaussian distribution, samples with large Mahalanobis distance more likely to be outliers. 1 Compute a robust mean ū. v i = u i ū. u i, v i R M[D] n 2 Initialize Σ 0 = I [D]. M n M[D] n 3 In kth iteration, sort v 1,..., v N by the Mahalanobis distance: d i = v T i Σ 1 k 1 v i. 4 Update Σ k from (100 α)% samples with smallest distances. 5 Iteration stops when Σ k 1 Σ k is small.
 16% liers (b) 7% rejected (c) 38% rejected (d) Maximal sample residuals.")

, i.e., the arrangement model stabilizes.")
12 STEP 2: Estimating the outlier percentage α%: Do we need the exact percentage for estimation? out- (a) 16% liers (b) 7% rejected (c) 38% rejected (d) Maximal sample residuals. 1 With noise and outliers present, unnecessary to distinguish outliers close to subspaces. 2 Robust PCA is moderately stable when the outlier percentage is over-estimated. Outlier Percentage Test based on the Influence Function Principle Further rejection only results in small changes in the model parameters and sample residuals (w.r.t. boundary threshold σ), i.e., the arrangement model stabilizes. Influence






")


13 Outline Multibody Epipolar Constraint GPCA-Voting Robust GPCA Applications Conclusion Simulations on Robust GPCA (parameters fixed at τ = 0.3rad and σ = 0.4) RGPCA-Influence (e) 12% (f) 32% (g) 48% (h) 12% (i) 32% (j) 48% (l) 32% (m) 48% (n) 12% (o) 32% (p) 48% RGPCA-MVT (k) 12%
14 Comparison with RANSAC Accuracy (q) (2, 2, 1) in R 3 (r) (4, 2, 2, 1) in R 5 (s) (5, 5, 5) in R 6 Speed Table: Average time of RANSAC and RGPCA with 24% outliers. Arrangement (2,2,1) in R 3 (4,2,2,1) in R 5 (5,5,5) in R 6 RANSAC 44s 5.1m 3.4m MVT 46s 23m 8m Influence 3m 58m 146m
15 Limitations of RGPCA 1 Hardware limits for high subspace dimension (> 10) or subspace number (> 6) in MATLAB. 2 Need to know the number of subspaces and dimensions. 3 Overfitting when percentage is overestimated, especially for MVT. = Animation Next section, we show solutions to these limitations via a new lossy coding framework.





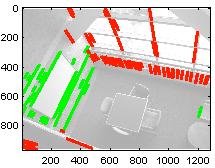
16 Outline Multibody Epipolar Constraint GPCA-Voting Robust GPCA Applications Conclusion Experiment 1: Motion Segmentation under 3-D Affine Projection Sequences: parking-lot segway toys man segway3 RANSAC: MVT: Influence: Feature extraction: Shi and Tomasi. Good features to track. CVPR 1994.





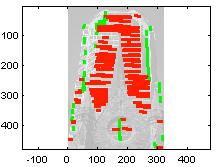
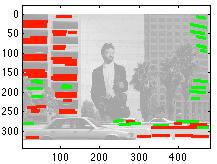
17 Outline Multibody Epipolar Constraint GPCA-Voting Robust GPCA Applications Experiment 2: Vanishing-Point Detection RGPCA-Influence Images: Segments: Influence: Feature extraction: Kahn et al. A fast line finder for vision-guided robot navigation. PAMI, Conclusion



18 Outline Multibody Epipolar Constraint GPCA-Voting Robust GPCA Applications RGPCA-MVT Images: Segments: MVT: Conclusion



19 Outline Multibody Epipolar Constraint GPCA-Voting Robust GPCA Applications RANSAC-on-Subspaces Images: Segments: RANSAC: Conclusion

20 Conclusions Estimation of hybrid subspace models is closely related to the study of subspace arrangements in algebraic geometry. Global structure of K subspaces uniquely determined by Kth degree vanishing polynomials. Two algorithms were proposed using vanishing polynomials as a global signature 1 Noise: GPCA-Voting. 2 Outliers: RGPCA. Confluence of Algebra and Statistics In estimation of hybrid subspace models: Algebra makes statistical algorithms well-conditioned; Statistics makes algebraic algorithms robust. G PC A
![Future Directions Mathematics: More complex models [Rao et al. ICCV 2005]. 1 A union of quadratic surfaces. 2 A mixture of linear subspaces and quadratic surfaces.](/docs-images/80/81213231/images/21-0.jpg "Kernel GPCA: tackle the curse of dimensionality in Veronese embedding.")
21 Future Directions Mathematics: More complex models [Rao et al. ICCV 2005]. 1 A union of quadratic surfaces. 2 A mixture of linear subspaces and quadratic surfaces. Kernel GPCA: tackle the curse of dimensionality in Veronese embedding. V1 V2 R D R M[D] n R M[D] n p(x) = c T x V1 V2 R D νn(x) = Null(Ln) x = = Rank(Ln) = M n [D] hi (n) Model selection: a unified scheme to tackle simultaneous model estimation and selection. Applications 1 Natural image compression and classification. 2 Hyper-spectral image analysis.
Part I Generalized Principal Component Analysis
 Part I Generalized Principal Component Analysis René Vidal Center for Imaging Science Institute for Computational Medicine Johns Hopkins University Principal Component Analysis (PCA) Given a set of points
Part I Generalized Principal Component Analysis René Vidal Center for Imaging Science Institute for Computational Medicine Johns Hopkins University Principal Component Analysis (PCA) Given a set of points
The Multibody Trifocal Tensor: Motion Segmentation from 3 Perspective Views
 The Multibody Trifocal Tensor: Motion Segmentation from 3 Perspective Views Richard Hartley 1,2 and RenéVidal 2,3 1 Dept. of Systems Engineering 3 Center for Imaging Science Australian National University
The Multibody Trifocal Tensor: Motion Segmentation from 3 Perspective Views Richard Hartley 1,2 and RenéVidal 2,3 1 Dept. of Systems Engineering 3 Center for Imaging Science Australian National University
Subspace Arrangements in Theory and Practice
 Subspace Arrangements in Theory and Practice Robert M. Fossum Department of Mathematics Beckman Institute University of Illinios at Urbana-Champaign Applications in Biology, Dynamics, and Statistics 09
Subspace Arrangements in Theory and Practice Robert M. Fossum Department of Mathematics Beckman Institute University of Illinios at Urbana-Champaign Applications in Biology, Dynamics, and Statistics 09
Segmentation of Dynamic Scenes from the Multibody Fundamental Matrix
 ECCV Workshop on Vision and Modeling of Dynamic Scenes, Copenhagen, Denmark, May 2002 Segmentation of Dynamic Scenes from the Multibody Fundamental Matrix René Vidal Dept of EECS, UC Berkeley Berkeley,
ECCV Workshop on Vision and Modeling of Dynamic Scenes, Copenhagen, Denmark, May 2002 Segmentation of Dynamic Scenes from the Multibody Fundamental Matrix René Vidal Dept of EECS, UC Berkeley Berkeley,
Vision par ordinateur
 Vision par ordinateur Géométrie épipolaire Frédéric Devernay Avec des transparents de Marc Pollefeys Epipolar geometry π Underlying structure in set of matches for rigid scenes C1 m1 l1 M L2 L1 l T 1 l
Vision par ordinateur Géométrie épipolaire Frédéric Devernay Avec des transparents de Marc Pollefeys Epipolar geometry π Underlying structure in set of matches for rigid scenes C1 m1 l1 M L2 L1 l T 1 l
ESTIMATION OF SUBSPACE ARRANGEMENTS: ITS ALGEBRA AND STATISTICS ALLEN YANG YANG
 ESTIMATION OF SUBSPACE ARRANGEMENTS: ITS ALGEBRA AND STATISTICS BY ALLEN YANG YANG B.Eng., University of Science and Technology of China, 2001 M.S., University of Illinois at Urbana-Champaign, 2003 M.S.,
ESTIMATION OF SUBSPACE ARRANGEMENTS: ITS ALGEBRA AND STATISTICS BY ALLEN YANG YANG B.Eng., University of Science and Technology of China, 2001 M.S., University of Illinois at Urbana-Champaign, 2003 M.S.,
Two-View Segmentation of Dynamic Scenes from the Multibody Fundamental Matrix
 Two-View Segmentation of Dynamic Scenes from the Multibody Fundamental Matrix René Vidal Stefano Soatto Shankar Sastry Department of EECS, UC Berkeley Department of Computer Sciences, UCLA 30 Cory Hall,
Two-View Segmentation of Dynamic Scenes from the Multibody Fundamental Matrix René Vidal Stefano Soatto Shankar Sastry Department of EECS, UC Berkeley Department of Computer Sciences, UCLA 30 Cory Hall,
Sparse Subspace Clustering
 Sparse Subspace Clustering Based on Sparse Subspace Clustering: Algorithm, Theory, and Applications by Elhamifar and Vidal (2013) Alex Gutierrez CSCI 8314 March 2, 2017 Outline 1 Motivation and Background
Sparse Subspace Clustering Based on Sparse Subspace Clustering: Algorithm, Theory, and Applications by Elhamifar and Vidal (2013) Alex Gutierrez CSCI 8314 March 2, 2017 Outline 1 Motivation and Background
Generalized Principal Component Analysis (GPCA)
") IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 27, NO. 12, PAGE 1945-1959, DECEMBER 2005 1 Generalized Principal Component Analysis (GPCA) René Vidal, Member, IEEE, Yi Ma, Member,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 27, NO. 12, PAGE 1945-1959, DECEMBER 2005 1 Generalized Principal Component Analysis (GPCA) René Vidal, Member, IEEE, Yi Ma, Member,
A New GPCA Algorithm for Clustering Subspaces by Fitting, Differentiating and Dividing Polynomials
 A New GPCA Algorithm for Clustering Subspaces by Fitting, Differentiating and Dividing Polynomials René Vidal Yi Ma Jacopo Piazzi Center for Imaging Science Electrical & Computer Engineering Mechanical
A New GPCA Algorithm for Clustering Subspaces by Fitting, Differentiating and Dividing Polynomials René Vidal Yi Ma Jacopo Piazzi Center for Imaging Science Electrical & Computer Engineering Mechanical
Nonrobust and Robust Objective Functions
 Nonrobust and Robust Objective Functions The objective function of the estimators in the input space is built from the sum of squared Mahalanobis distances (residuals) d 2 i = 1 σ 2(y i y io ) C + y i
Nonrobust and Robust Objective Functions The objective function of the estimators in the input space is built from the sum of squared Mahalanobis distances (residuals) d 2 i = 1 σ 2(y i y io ) C + y i
Two-View Multibody Structure from Motion
 International Journal of Computer Vision 68(), 7 5, 006 c 006 Springer Science + Business Media, LLC Manufactured in he Netherlands DOI: 0007/s63-005-4839-7 wo-view Multibody Structure from Motion RENÉ
International Journal of Computer Vision 68(), 7 5, 006 c 006 Springer Science + Business Media, LLC Manufactured in he Netherlands DOI: 0007/s63-005-4839-7 wo-view Multibody Structure from Motion RENÉ
LECTURE NOTE #10 PROF. ALAN YUILLE
 LECTURE NOTE #10 PROF. ALAN YUILLE 1. Principle Component Analysis (PCA) One way to deal with the curse of dimensionality is to project data down onto a space of low dimensions, see figure (1). Figure
LECTURE NOTE #10 PROF. ALAN YUILLE 1. Principle Component Analysis (PCA) One way to deal with the curse of dimensionality is to project data down onto a space of low dimensions, see figure (1). Figure
FILTRATED ALGEBRAIC SUBSPACE CLUSTERING
 FILTRATED ALGEBRAIC SUBSPACE CLUSTERING MANOLIS C. TSAKIRIS AND RENÉ VIDAL Abstract. Subspace clustering is the problem of clustering data that lie close to a union of linear subspaces. Existing algebraic
FILTRATED ALGEBRAIC SUBSPACE CLUSTERING MANOLIS C. TSAKIRIS AND RENÉ VIDAL Abstract. Subspace clustering is the problem of clustering data that lie close to a union of linear subspaces. Existing algebraic
Vision 3D articielle Session 2: Essential and fundamental matrices, their computation, RANSAC algorithm
 Vision 3D articielle Session 2: Essential and fundamental matrices, their computation, RANSAC algorithm Pascal Monasse monasse@imagine.enpc.fr IMAGINE, École des Ponts ParisTech Contents Some useful rules
Vision 3D articielle Session 2: Essential and fundamental matrices, their computation, RANSAC algorithm Pascal Monasse monasse@imagine.enpc.fr IMAGINE, École des Ponts ParisTech Contents Some useful rules
ECE521 week 3: 23/26 January 2017
 ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
Machine Learning for Data Science (CS4786) Lecture 12
 Lecture 12") Machine Learning for Data Science (CS4786) Lecture 12 Gaussian Mixture Models Course Webpage : http://www.cs.cornell.edu/courses/cs4786/2016fa/ Back to K-means Single link is sensitive to outliners We
Machine Learning for Data Science (CS4786) Lecture 12 Gaussian Mixture Models Course Webpage : http://www.cs.cornell.edu/courses/cs4786/2016fa/ Back to K-means Single link is sensitive to outliners We
CS 4495 Computer Vision Principle Component Analysis
 CS 4495 Computer Vision Principle Component Analysis (and it s use in Computer Vision) Aaron Bobick School of Interactive Computing Administrivia PS6 is out. Due *** Sunday, Nov 24th at 11:55pm *** PS7
CS 4495 Computer Vision Principle Component Analysis (and it s use in Computer Vision) Aaron Bobick School of Interactive Computing Administrivia PS6 is out. Due *** Sunday, Nov 24th at 11:55pm *** PS7
Robust Motion Segmentation by Spectral Clustering
 Robust Motion Segmentation by Spectral Clustering Hongbin Wang and Phil F. Culverhouse Centre for Robotics Intelligent Systems University of Plymouth Plymouth, PL4 8AA, UK {hongbin.wang, P.Culverhouse}@plymouth.ac.uk
Robust Motion Segmentation by Spectral Clustering Hongbin Wang and Phil F. Culverhouse Centre for Robotics Intelligent Systems University of Plymouth Plymouth, PL4 8AA, UK {hongbin.wang, P.Culverhouse}@plymouth.ac.uk
Outliers Robustness in Multivariate Orthogonal Regression
 674 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000 Outliers Robustness in Multivariate Orthogonal Regression Giuseppe Carlo Calafiore Abstract
674 IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS PART A: SYSTEMS AND HUMANS, VOL. 30, NO. 6, NOVEMBER 2000 Outliers Robustness in Multivariate Orthogonal Regression Giuseppe Carlo Calafiore Abstract
SEQUENTIAL SUBSPACE FINDING: A NEW ALGORITHM FOR LEARNING LOW-DIMENSIONAL LINEAR SUBSPACES.
 SEQUENTIAL SUBSPACE FINDING: A NEW ALGORITHM FOR LEARNING LOW-DIMENSIONAL LINEAR SUBSPACES Mostafa Sadeghi a, Mohsen Joneidi a, Massoud Babaie-Zadeh a, and Christian Jutten b a Electrical Engineering Department,
SEQUENTIAL SUBSPACE FINDING: A NEW ALGORITHM FOR LEARNING LOW-DIMENSIONAL LINEAR SUBSPACES Mostafa Sadeghi a, Mohsen Joneidi a, Massoud Babaie-Zadeh a, and Christian Jutten b a Electrical Engineering Department,
Generalized Principal Component Analysis (GPCA): an Algebraic Geometric Approach to Subspace Clustering and Motion Segmentation. René Esteban Vidal
: an Algebraic Geometric Approach to Subspace Clustering and Motion Segmentation. René Esteban Vidal") Generalized Principal Component Analysis (GPCA): an Algebraic Geometric Approach to Subspace Clustering and Motion Segmentation by René Esteban Vidal B.S. (P. Universidad Católica de Chile) 1995 M.S. (University
Generalized Principal Component Analysis (GPCA): an Algebraic Geometric Approach to Subspace Clustering and Motion Segmentation by René Esteban Vidal B.S. (P. Universidad Católica de Chile) 1995 M.S. (University
A Brief Overview of Robust Statistics
 A Brief Overview of Robust Statistics Olfa Nasraoui Department of Computer Engineering & Computer Science University of Louisville, olfa.nasraoui_at_louisville.edu Robust Statistical Estimators Robust
A Brief Overview of Robust Statistics Olfa Nasraoui Department of Computer Engineering & Computer Science University of Louisville, olfa.nasraoui_at_louisville.edu Robust Statistical Estimators Robust
Robust scale estimation with extensions
 Robust scale estimation with extensions Garth Tarr, Samuel Müller and Neville Weber School of Mathematics and Statistics THE UNIVERSITY OF SYDNEY Outline The robust scale estimator P n Robust covariance
Robust scale estimation with extensions Garth Tarr, Samuel Müller and Neville Weber School of Mathematics and Statistics THE UNIVERSITY OF SYDNEY Outline The robust scale estimator P n Robust covariance
SLAM Techniques and Algorithms. Jack Collier. Canada. Recherche et développement pour la défense Canada. Defence Research and Development Canada
 SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
SLAM Techniques and Algorithms Jack Collier Defence Research and Development Canada Recherche et développement pour la défense Canada Canada Goals What will we learn Gain an appreciation for what SLAM
Conditions for Segmentation of Motion with Affine Fundamental Matrix
 Conditions for Segmentation of Motion with Affine Fundamental Matrix Shafriza Nisha Basah 1, Reza Hoseinnezhad 2, and Alireza Bab-Hadiashar 1 Faculty of Engineering and Industrial Sciences, Swinburne University
Conditions for Segmentation of Motion with Affine Fundamental Matrix Shafriza Nisha Basah 1, Reza Hoseinnezhad 2, and Alireza Bab-Hadiashar 1 Faculty of Engineering and Industrial Sciences, Swinburne University
Data Exploration and Unsupervised Learning with Clustering
 Data Exploration and Unsupervised Learning with Clustering Paul F Rodriguez,PhD San Diego Supercomputer Center Predictive Analytic Center of Excellence Clustering Idea Given a set of data can we find a
Data Exploration and Unsupervised Learning with Clustering Paul F Rodriguez,PhD San Diego Supercomputer Center Predictive Analytic Center of Excellence Clustering Idea Given a set of data can we find a
Machine Learning. CUNY Graduate Center, Spring Lectures 11-12: Unsupervised Learning 1. Professor Liang Huang.
 Machine Learning CUNY Graduate Center, Spring 2013 Lectures 11-12: Unsupervised Learning 1 (Clustering: k-means, EM, mixture models) Professor Liang Huang huang@cs.qc.cuny.edu http://acl.cs.qc.edu/~lhuang/teaching/machine-learning
Machine Learning CUNY Graduate Center, Spring 2013 Lectures 11-12: Unsupervised Learning 1 (Clustering: k-means, EM, mixture models) Professor Liang Huang huang@cs.qc.cuny.edu http://acl.cs.qc.edu/~lhuang/teaching/machine-learning
Introduction to Data Mining
 Introduction to Data Mining Lecture #21: Dimensionality Reduction Seoul National University 1 In This Lecture Understand the motivation and applications of dimensionality reduction Learn the definition
Introduction to Data Mining Lecture #21: Dimensionality Reduction Seoul National University 1 In This Lecture Understand the motivation and applications of dimensionality reduction Learn the definition
A Closed-Form Solution to Tensor Voting for Robust Parameter Estimation via Expectation-Maximization
 A Closed-Form Solution to Tensor Voting for Robust Parameter Estimation via Expectation-Maximization Tai-Pang Wu Jiaya Jia Chi-Keung Tang The Hong Kong University of Science and Technology The Chinese
A Closed-Form Solution to Tensor Voting for Robust Parameter Estimation via Expectation-Maximization Tai-Pang Wu Jiaya Jia Chi-Keung Tang The Hong Kong University of Science and Technology The Chinese
Fast RANSAC with Preview Model Parameters Evaluation
 1000-9825/2005/16(08)1431 2005 Journal of Software Vol.16, No.8 +, ( ATR, 410073) Fast RANSAC with Preview Model Parameters Evaluation CHEN Fu-Xing +, WANG Run-Sheng (National Key Laboratory of ATR, National
1000-9825/2005/16(08)1431 2005 Journal of Software Vol.16, No.8 +, ( ATR, 410073) Fast RANSAC with Preview Model Parameters Evaluation CHEN Fu-Xing +, WANG Run-Sheng (National Key Laboratory of ATR, National
Generalized Principal Component Analysis
 This is page i Printer: Opaque this Generalized Principal Component Analysis Estimation & Segmentation of Hybrid Models René Vidal (JOHNS HOPKINS UNIVERSITY) Yi Ma (UNIVERSITY OF ILLINOIS AT URBANA-CHAMPAIGN)
This is page i Printer: Opaque this Generalized Principal Component Analysis Estimation & Segmentation of Hybrid Models René Vidal (JOHNS HOPKINS UNIVERSITY) Yi Ma (UNIVERSITY OF ILLINOIS AT URBANA-CHAMPAIGN)
Tensor LRR Based Subspace Clustering
 Tensor LRR Based Subspace Clustering Yifan Fu, Junbin Gao and David Tien School of Computing and mathematics Charles Sturt University Bathurst, NSW 2795, Australia Email:{yfu, jbgao, dtien}@csu.edu.au
Tensor LRR Based Subspace Clustering Yifan Fu, Junbin Gao and David Tien School of Computing and mathematics Charles Sturt University Bathurst, NSW 2795, Australia Email:{yfu, jbgao, dtien}@csu.edu.au
Modeling Classes of Shapes Suppose you have a class of shapes with a range of variations: System 2 Overview
 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 Modeling Classes of Shapes Suppose you have a class of shapes with a range of variations: System processes System Overview Previous Systems:
4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 4 4 4 6 Modeling Classes of Shapes Suppose you have a class of shapes with a range of variations: System processes System Overview Previous Systems:
CS4495/6495 Introduction to Computer Vision. 8B-L2 Principle Component Analysis (and its use in Computer Vision)
") CS4495/6495 Introduction to Computer Vision 8B-L2 Principle Component Analysis (and its use in Computer Vision) Wavelength 2 Wavelength 2 Principal Components Principal components are all about the directions
CS4495/6495 Introduction to Computer Vision 8B-L2 Principle Component Analysis (and its use in Computer Vision) Wavelength 2 Wavelength 2 Principal Components Principal components are all about the directions
Automatic Camera Model Selection for Multibody Motion Segmentation
 Memoirs of the Faculty of Engineering, Okayama University, Vol. 37, No. 1, pp. 45 54, November 2002 Automatic Camera Model Selection for Multibody Motion Segmentation Yasuyuki SUGAYA and Kenichi KANATANI
Memoirs of the Faculty of Engineering, Okayama University, Vol. 37, No. 1, pp. 45 54, November 2002 Automatic Camera Model Selection for Multibody Motion Segmentation Yasuyuki SUGAYA and Kenichi KANATANI
Machine Learning for Signal Processing Sparse and Overcomplete Representations
 Machine Learning for Signal Processing Sparse and Overcomplete Representations Abelino Jimenez (slides from Bhiksha Raj and Sourish Chaudhuri) Oct 1, 217 1 So far Weights Data Basis Data Independent ICA
Machine Learning for Signal Processing Sparse and Overcomplete Representations Abelino Jimenez (slides from Bhiksha Raj and Sourish Chaudhuri) Oct 1, 217 1 So far Weights Data Basis Data Independent ICA
Introduction to Machine Learning. PCA and Spectral Clustering. Introduction to Machine Learning, Slides: Eran Halperin
 1 Introduction to Machine Learning PCA and Spectral Clustering Introduction to Machine Learning, 2013-14 Slides: Eran Halperin Singular Value Decomposition (SVD) The singular value decomposition (SVD)
1 Introduction to Machine Learning PCA and Spectral Clustering Introduction to Machine Learning, 2013-14 Slides: Eran Halperin Singular Value Decomposition (SVD) The singular value decomposition (SVD)
A minimal solution to the autocalibration of radial distortion
 A minimal solution to the autocalibration of radial distortion Zuzana Kukelova Tomas Pajdla Center for Machine Perception, Dept. of Cybernetics, Faculty of Elec. Eng. Czech Technical University in Prague,
A minimal solution to the autocalibration of radial distortion Zuzana Kukelova Tomas Pajdla Center for Machine Perception, Dept. of Cybernetics, Faculty of Elec. Eng. Czech Technical University in Prague,
MACHINE LEARNING. Methods for feature extraction and reduction of dimensionality: Probabilistic PCA and kernel PCA
 1 MACHINE LEARNING Methods for feature extraction and reduction of dimensionality: Probabilistic PCA and kernel PCA 2 Practicals Next Week Next Week, Practical Session on Computer Takes Place in Room GR
1 MACHINE LEARNING Methods for feature extraction and reduction of dimensionality: Probabilistic PCA and kernel PCA 2 Practicals Next Week Next Week, Practical Session on Computer Takes Place in Room GR
CS 540: Machine Learning Lecture 1: Introduction
 CS 540: Machine Learning Lecture 1: Introduction AD January 2008 AD () January 2008 1 / 41 Acknowledgments Thanks to Nando de Freitas Kevin Murphy AD () January 2008 2 / 41 Administrivia & Announcement
CS 540: Machine Learning Lecture 1: Introduction AD January 2008 AD () January 2008 1 / 41 Acknowledgments Thanks to Nando de Freitas Kevin Murphy AD () January 2008 2 / 41 Administrivia & Announcement
Computer Vision Group Prof. Daniel Cremers. 6. Mixture Models and Expectation-Maximization
 Prof. Daniel Cremers 6. Mixture Models and Expectation-Maximization Motivation Often the introduction of latent (unobserved) random variables into a model can help to express complex (marginal) distributions
Prof. Daniel Cremers 6. Mixture Models and Expectation-Maximization Motivation Often the introduction of latent (unobserved) random variables into a model can help to express complex (marginal) distributions
Gaussian Mixture Models with Component Means Constrained in Pre-selected Subspaces
 Gaussian Mixture Models with Component Means Constrained in Pre-selected Subspaces Mu Qiao and Jia Li Abstract We investigate a Gaussian mixture model (GMM) with component means constrained in a pre-selected
Gaussian Mixture Models with Component Means Constrained in Pre-selected Subspaces Mu Qiao and Jia Li Abstract We investigate a Gaussian mixture model (GMM) with component means constrained in a pre-selected
CSE446: non-parametric methods Spring 2017
 CSE446: non-parametric methods Spring 2017 Ali Farhadi Slides adapted from Carlos Guestrin and Luke Zettlemoyer Linear Regression: What can go wrong? What do we do if the bias is too strong? Might want
CSE446: non-parametric methods Spring 2017 Ali Farhadi Slides adapted from Carlos Guestrin and Luke Zettlemoyer Linear Regression: What can go wrong? What do we do if the bias is too strong? Might want
Improved Fast Gauss Transform. Fast Gauss Transform (FGT)
") 10/11/011 Improved Fast Gauss Transform Based on work by Changjiang Yang (00), Vikas Raykar (005), and Vlad Morariu (007) Fast Gauss Transform (FGT) Originally proposed by Greengard and Strain (1991) to
10/11/011 Improved Fast Gauss Transform Based on work by Changjiang Yang (00), Vikas Raykar (005), and Vlad Morariu (007) Fast Gauss Transform (FGT) Originally proposed by Greengard and Strain (1991) to
Uncertainty Models in Quasiconvex Optimization for Geometric Reconstruction
 Uncertainty Models in Quasiconvex Optimization for Geometric Reconstruction Qifa Ke and Takeo Kanade Department of Computer Science, Carnegie Mellon University Email: ke@cmu.edu, tk@cs.cmu.edu Abstract
Uncertainty Models in Quasiconvex Optimization for Geometric Reconstruction Qifa Ke and Takeo Kanade Department of Computer Science, Carnegie Mellon University Email: ke@cmu.edu, tk@cs.cmu.edu Abstract
Camera Calibration The purpose of camera calibration is to determine the intrinsic camera parameters (c 0,r 0 ), f, s x, s y, skew parameter (s =
, f, s x, s y, skew parameter (s =") Camera Calibration The purpose of camera calibration is to determine the intrinsic camera parameters (c 0,r 0 ), f, s x, s y, skew parameter (s = cotα), and the lens distortion (radial distortion coefficient
Camera Calibration The purpose of camera calibration is to determine the intrinsic camera parameters (c 0,r 0 ), f, s x, s y, skew parameter (s = cotα), and the lens distortion (radial distortion coefficient
OBJECT DETECTION AND RECOGNITION IN DIGITAL IMAGES
 OBJECT DETECTION AND RECOGNITION IN DIGITAL IMAGES THEORY AND PRACTICE Bogustaw Cyganek AGH University of Science and Technology, Poland WILEY A John Wiley &. Sons, Ltd., Publication Contents Preface Acknowledgements
OBJECT DETECTION AND RECOGNITION IN DIGITAL IMAGES THEORY AND PRACTICE Bogustaw Cyganek AGH University of Science and Technology, Poland WILEY A John Wiley &. Sons, Ltd., Publication Contents Preface Acknowledgements
Machine Learning for Signal Processing Sparse and Overcomplete Representations. Bhiksha Raj (slides from Sourish Chaudhuri) Oct 22, 2013
 Oct 22, 2013") Machine Learning for Signal Processing Sparse and Overcomplete Representations Bhiksha Raj (slides from Sourish Chaudhuri) Oct 22, 2013 1 Key Topics in this Lecture Basics Component-based representations
Machine Learning for Signal Processing Sparse and Overcomplete Representations Bhiksha Raj (slides from Sourish Chaudhuri) Oct 22, 2013 1 Key Topics in this Lecture Basics Component-based representations
CS 3710: Visual Recognition Describing Images with Features. Adriana Kovashka Department of Computer Science January 8, 2015
 CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
CS 3710: Visual Recognition Describing Images with Features Adriana Kovashka Department of Computer Science January 8, 2015 Plan for Today Presentation assignments + schedule changes Image filtering Feature
System 1 (last lecture) : limited to rigidly structured shapes. System 2 : recognition of a class of varying shapes. Need to:
 : limited to rigidly structured shapes. System 2 : recognition of a class of varying shapes. Need to:") System 2 : Modelling & Recognising Modelling and Recognising Classes of Classes of Shapes Shape : PDM & PCA All the same shape? System 1 (last lecture) : limited to rigidly structured shapes System 2 :
System 2 : Modelling & Recognising Modelling and Recognising Classes of Classes of Shapes Shape : PDM & PCA All the same shape? System 1 (last lecture) : limited to rigidly structured shapes System 2 :
Fantope Regularization in Metric Learning
 Fantope Regularization in Metric Learning CVPR 2014 Marc T. Law (LIP6, UPMC), Nicolas Thome (LIP6 - UPMC Sorbonne Universités), Matthieu Cord (LIP6 - UPMC Sorbonne Universités), Paris, France Introduction
Fantope Regularization in Metric Learning CVPR 2014 Marc T. Law (LIP6, UPMC), Nicolas Thome (LIP6 - UPMC Sorbonne Universités), Matthieu Cord (LIP6 - UPMC Sorbonne Universités), Paris, France Introduction
Kaggle.
 Administrivia Mini-project 2 due April 7, in class implement multi-class reductions, naive bayes, kernel perceptron, multi-class logistic regression and two layer neural networks training set: Project
Administrivia Mini-project 2 due April 7, in class implement multi-class reductions, naive bayes, kernel perceptron, multi-class logistic regression and two layer neural networks training set: Project
COMS 4721: Machine Learning for Data Science Lecture 19, 4/6/2017
 COMS 4721: Machine Learning for Data Science Lecture 19, 4/6/2017 Prof. John Paisley Department of Electrical Engineering & Data Science Institute Columbia University PRINCIPAL COMPONENT ANALYSIS DIMENSIONALITY
COMS 4721: Machine Learning for Data Science Lecture 19, 4/6/2017 Prof. John Paisley Department of Electrical Engineering & Data Science Institute Columbia University PRINCIPAL COMPONENT ANALYSIS DIMENSIONALITY
Linear Regression (continued)
") Linear Regression (continued) Professor Ameet Talwalkar Professor Ameet Talwalkar CS260 Machine Learning Algorithms February 6, 2017 1 / 39 Outline 1 Administration 2 Review of last lecture 3 Linear regression
Linear Regression (continued) Professor Ameet Talwalkar Professor Ameet Talwalkar CS260 Machine Learning Algorithms February 6, 2017 1 / 39 Outline 1 Administration 2 Review of last lecture 3 Linear regression
Fitting Linear Statistical Models to Data by Least Squares: Introduction
 Fitting Linear Statistical Models to Data by Least Squares: Introduction Radu Balan, Brian R. Hunt and C. David Levermore University of Maryland, College Park University of Maryland, College Park, MD Math
Fitting Linear Statistical Models to Data by Least Squares: Introduction Radu Balan, Brian R. Hunt and C. David Levermore University of Maryland, College Park University of Maryland, College Park, MD Math
Sparse Gaussian Markov Random Field Mixtures for Anomaly Detection
 Sparse Gaussian Markov Random Field Mixtures for Anomaly Detection Tsuyoshi Idé ( Ide-san ), Ankush Khandelwal*, Jayant Kalagnanam IBM Research, T. J. Watson Research Center (*Currently with University
Sparse Gaussian Markov Random Field Mixtures for Anomaly Detection Tsuyoshi Idé ( Ide-san ), Ankush Khandelwal*, Jayant Kalagnanam IBM Research, T. J. Watson Research Center (*Currently with University
9. Robust regression
 9. Robust regression Least squares regression........................................................ 2 Problems with LS regression..................................................... 3 Robust regression............................................................
9. Robust regression Least squares regression........................................................ 2 Problems with LS regression..................................................... 3 Robust regression............................................................
Grassmann Averages for Scalable Robust PCA Supplementary Material
 Grassmann Averages for Scalable Robust PCA Supplementary Material Søren Hauberg DTU Compute Lyngby, Denmark sohau@dtu.dk Aasa Feragen DIKU and MPIs Tübingen Denmark and Germany aasa@diku.dk Michael J.
Grassmann Averages for Scalable Robust PCA Supplementary Material Søren Hauberg DTU Compute Lyngby, Denmark sohau@dtu.dk Aasa Feragen DIKU and MPIs Tübingen Denmark and Germany aasa@diku.dk Michael J.
PCA and admixture models
 PCA and admixture models CM226: Machine Learning for Bioinformatics. Fall 2016 Sriram Sankararaman Acknowledgments: Fei Sha, Ameet Talwalkar, Alkes Price PCA and admixture models 1 / 57 Announcements HW1
PCA and admixture models CM226: Machine Learning for Bioinformatics. Fall 2016 Sriram Sankararaman Acknowledgments: Fei Sha, Ameet Talwalkar, Alkes Price PCA and admixture models 1 / 57 Announcements HW1
Lecture 11: Unsupervised Machine Learning
 CSE517A Machine Learning Spring 2018 Lecture 11: Unsupervised Machine Learning Instructor: Marion Neumann Scribe: Jingyu Xin Reading: fcml Ch6 (Intro), 6.2 (k-means), 6.3 (Mixture Models); [optional]:
CSE517A Machine Learning Spring 2018 Lecture 11: Unsupervised Machine Learning Instructor: Marion Neumann Scribe: Jingyu Xin Reading: fcml Ch6 (Intro), 6.2 (k-means), 6.3 (Mixture Models); [optional]:
Algebraic Clustering of Affine Subspaces
 1 Algebraic Clustering of Affine Subspaces Manolis C. Tsakiris and René Vidal, Fellow, IEEE Abstract Subspace clustering is an important problem in machine learning with many applications in computer vision
1 Algebraic Clustering of Affine Subspaces Manolis C. Tsakiris and René Vidal, Fellow, IEEE Abstract Subspace clustering is an important problem in machine learning with many applications in computer vision
LECTURE 16: PCA AND SVD
 Instructor: Sael Lee CS549 Computational Biology LECTURE 16: PCA AND SVD Resource: PCA Slide by Iyad Batal Chapter 12 of PRML Shlens, J. (2003). A tutorial on principal component analysis. CONTENT Principal
Instructor: Sael Lee CS549 Computational Biology LECTURE 16: PCA AND SVD Resource: PCA Slide by Iyad Batal Chapter 12 of PRML Shlens, J. (2003). A tutorial on principal component analysis. CONTENT Principal
Non-convex Robust PCA: Provable Bounds
 Non-convex Robust PCA: Provable Bounds Anima Anandkumar U.C. Irvine Joint work with Praneeth Netrapalli, U.N. Niranjan, Prateek Jain and Sujay Sanghavi. Learning with Big Data High Dimensional Regime Missing
Non-convex Robust PCA: Provable Bounds Anima Anandkumar U.C. Irvine Joint work with Praneeth Netrapalli, U.N. Niranjan, Prateek Jain and Sujay Sanghavi. Learning with Big Data High Dimensional Regime Missing
Information Theory in Computer Vision and Pattern Recognition
 Francisco Escolano Pablo Suau Boyan Bonev Information Theory in Computer Vision and Pattern Recognition Foreword by Alan Yuille ~ Springer Contents 1 Introduction...............................................
Francisco Escolano Pablo Suau Boyan Bonev Information Theory in Computer Vision and Pattern Recognition Foreword by Alan Yuille ~ Springer Contents 1 Introduction...............................................
MULTICHANNEL SIGNAL PROCESSING USING SPATIAL RANK COVARIANCE MATRICES
 MULTICHANNEL SIGNAL PROCESSING USING SPATIAL RANK COVARIANCE MATRICES S. Visuri 1 H. Oja V. Koivunen 1 1 Signal Processing Lab. Dept. of Statistics Tampere Univ. of Technology University of Jyväskylä P.O.
MULTICHANNEL SIGNAL PROCESSING USING SPATIAL RANK COVARIANCE MATRICES S. Visuri 1 H. Oja V. Koivunen 1 1 Signal Processing Lab. Dept. of Statistics Tampere Univ. of Technology University of Jyväskylä P.O.
CS 6375 Machine Learning
 CS 6375 Machine Learning Nicholas Ruozzi University of Texas at Dallas Slides adapted from David Sontag and Vibhav Gogate Course Info. Instructor: Nicholas Ruozzi Office: ECSS 3.409 Office hours: Tues.
CS 6375 Machine Learning Nicholas Ruozzi University of Texas at Dallas Slides adapted from David Sontag and Vibhav Gogate Course Info. Instructor: Nicholas Ruozzi Office: ECSS 3.409 Office hours: Tues.
ON THE CALCULATION OF A ROBUST S-ESTIMATOR OF A COVARIANCE MATRIX
 STATISTICS IN MEDICINE Statist. Med. 17, 2685 2695 (1998) ON THE CALCULATION OF A ROBUST S-ESTIMATOR OF A COVARIANCE MATRIX N. A. CAMPBELL *, H. P. LOPUHAA AND P. J. ROUSSEEUW CSIRO Mathematical and Information
STATISTICS IN MEDICINE Statist. Med. 17, 2685 2695 (1998) ON THE CALCULATION OF A ROBUST S-ESTIMATOR OF A COVARIANCE MATRIX N. A. CAMPBELL *, H. P. LOPUHAA AND P. J. ROUSSEEUW CSIRO Mathematical and Information
Lecture: Face Recognition and Feature Reduction
 Lecture: Face Recognition and Feature Reduction Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 Recap - Curse of dimensionality Assume 5000 points uniformly distributed in the
Lecture: Face Recognition and Feature Reduction Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 Recap - Curse of dimensionality Assume 5000 points uniformly distributed in the
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Tasha Vanesian LECTURE 3 Calibrated 3D Reconstruction 3.1. Geometric View of Epipolar Constraint We are trying to solve the following problem:
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Tasha Vanesian LECTURE 3 Calibrated 3D Reconstruction 3.1. Geometric View of Epipolar Constraint We are trying to solve the following problem:
Least Squares Optimization
 Least Squares Optimization The following is a brief review of least squares optimization and constrained optimization techniques. Broadly, these techniques can be used in data analysis and visualization
Least Squares Optimization The following is a brief review of least squares optimization and constrained optimization techniques. Broadly, these techniques can be used in data analysis and visualization
PCA & ICA. CE-717: Machine Learning Sharif University of Technology Spring Soleymani
 PCA & ICA CE-717: Machine Learning Sharif University of Technology Spring 2015 Soleymani Dimensionality Reduction: Feature Selection vs. Feature Extraction Feature selection Select a subset of a given
PCA & ICA CE-717: Machine Learning Sharif University of Technology Spring 2015 Soleymani Dimensionality Reduction: Feature Selection vs. Feature Extraction Feature selection Select a subset of a given
ROBUST MULTIPLE-VIEW GEOMETRY ESTIMATION BASED ON GMM
 Computing and Informatics, Vol. 21, 2002, 591 606 ROBUST MULTIPLE-VIEW GEOMETRY ESTIMATION BASED ON GMM Mingxing Hu, Qiang Xing, Baozong Yuan, Xiaofang Tang Institute of Information Science Northern Jiaotong
Computing and Informatics, Vol. 21, 2002, 591 606 ROBUST MULTIPLE-VIEW GEOMETRY ESTIMATION BASED ON GMM Mingxing Hu, Qiang Xing, Baozong Yuan, Xiaofang Tang Institute of Information Science Northern Jiaotong
CS168: The Modern Algorithmic Toolbox Lecture #8: How PCA Works
 CS68: The Modern Algorithmic Toolbox Lecture #8: How PCA Works Tim Roughgarden & Gregory Valiant April 20, 206 Introduction Last lecture introduced the idea of principal components analysis (PCA). The
CS68: The Modern Algorithmic Toolbox Lecture #8: How PCA Works Tim Roughgarden & Gregory Valiant April 20, 206 Introduction Last lecture introduced the idea of principal components analysis (PCA). The
Machine Learning - MT & 14. PCA and MDS
 Machine Learning - MT 2016 13 & 14. PCA and MDS Varun Kanade University of Oxford November 21 & 23, 2016 Announcements Sheet 4 due this Friday by noon Practical 3 this week (continue next week if necessary)
Machine Learning - MT 2016 13 & 14. PCA and MDS Varun Kanade University of Oxford November 21 & 23, 2016 Announcements Sheet 4 due this Friday by noon Practical 3 this week (continue next week if necessary)
Introduction to Nonlinear Image Processing
 Introduction to Nonlinear Image Processing 1 IPAM Summer School on Computer Vision July 22, 2013 Iasonas Kokkinos Center for Visual Computing Ecole Centrale Paris / INRIA Saclay Mean and median 2 Observations
Introduction to Nonlinear Image Processing 1 IPAM Summer School on Computer Vision July 22, 2013 Iasonas Kokkinos Center for Visual Computing Ecole Centrale Paris / INRIA Saclay Mean and median 2 Observations
Multivariate Statistics (I) 2. Principal Component Analysis (PCA)
 2. Principal Component Analysis (PCA)") Multivariate Statistics (I) 2. Principal Component Analysis (PCA) 2.1 Comprehension of PCA 2.2 Concepts of PCs 2.3 Algebraic derivation of PCs 2.4 Selection and goodness-of-fit of PCs 2.5 Algebraic derivation
Multivariate Statistics (I) 2. Principal Component Analysis (PCA) 2.1 Comprehension of PCA 2.2 Concepts of PCs 2.3 Algebraic derivation of PCs 2.4 Selection and goodness-of-fit of PCs 2.5 Algebraic derivation
Data reduction for multivariate analysis
 Data reduction for multivariate analysis Using T 2, m-cusum, m-ewma can help deal with the multivariate detection cases. But when the characteristic vector x of interest is of high dimension, it is difficult
Data reduction for multivariate analysis Using T 2, m-cusum, m-ewma can help deal with the multivariate detection cases. But when the characteristic vector x of interest is of high dimension, it is difficult
Dimension Reduction Techniques. Presented by Jie (Jerry) Yu
 Yu") Dimension Reduction Techniques Presented by Jie (Jerry) Yu Outline Problem Modeling Review of PCA and MDS Isomap Local Linear Embedding (LLE) Charting Background Advances in data collection and storage
Dimension Reduction Techniques Presented by Jie (Jerry) Yu Outline Problem Modeling Review of PCA and MDS Isomap Local Linear Embedding (LLE) Charting Background Advances in data collection and storage
Data Mining and Analysis: Fundamental Concepts and Algorithms
 Data Mining and Analysis: Fundamental Concepts and Algorithms dataminingbook.info Mohammed J. Zaki 1 Wagner Meira Jr. 2 1 Department of Computer Science Rensselaer Polytechnic Institute, Troy, NY, USA
Data Mining and Analysis: Fundamental Concepts and Algorithms dataminingbook.info Mohammed J. Zaki 1 Wagner Meira Jr. 2 1 Department of Computer Science Rensselaer Polytechnic Institute, Troy, NY, USA
Affine Structure From Motion
 EECS43-Advanced Computer Vision Notes Series 9 Affine Structure From Motion Ying Wu Electrical Engineering & Computer Science Northwestern University Evanston, IL 68 yingwu@ece.northwestern.edu Contents
EECS43-Advanced Computer Vision Notes Series 9 Affine Structure From Motion Ying Wu Electrical Engineering & Computer Science Northwestern University Evanston, IL 68 yingwu@ece.northwestern.edu Contents
CS181 Midterm 2 Practice Solutions
 CS181 Midterm 2 Practice Solutions 1. Convergence of -Means Consider Lloyd s algorithm for finding a -Means clustering of N data, i.e., minimizing the distortion measure objective function J({r n } N n=1,
CS181 Midterm 2 Practice Solutions 1. Convergence of -Means Consider Lloyd s algorithm for finding a -Means clustering of N data, i.e., minimizing the distortion measure objective function J({r n } N n=1,
ε ε
 The 8th International Conference on Computer Vision, July, Vancouver, Canada, Vol., pp. 86{9. Motion Segmentation by Subspace Separation and Model Selection Kenichi Kanatani Department of Information Technology,
The 8th International Conference on Computer Vision, July, Vancouver, Canada, Vol., pp. 86{9. Motion Segmentation by Subspace Separation and Model Selection Kenichi Kanatani Department of Information Technology,
Identification of Switched MIMO ARX models
 Identification of Switched MIMO ARX models Laurent Bako 1 and René Vidal 2 1 Ecole des Mines de Douai, Département Informatique et Automatique 59508, Douai, France bako@ensm-douai.fr 2 Center of Imaging
Identification of Switched MIMO ARX models Laurent Bako 1 and René Vidal 2 1 Ecole des Mines de Douai, Département Informatique et Automatique 59508, Douai, France bako@ensm-douai.fr 2 Center of Imaging
ALGEBRAIC GROUPS. Disclaimer: There are millions of errors in these notes!
 ALGEBRAIC GROUPS Disclaimer: There are millions of errors in these notes! 1. Some algebraic geometry The subject of algebraic groups depends on the interaction between algebraic geometry and group theory.
ALGEBRAIC GROUPS Disclaimer: There are millions of errors in these notes! 1. Some algebraic geometry The subject of algebraic groups depends on the interaction between algebraic geometry and group theory.
Mixtures of Robust Probabilistic Principal Component Analyzers
 Mixtures of Robust Probabilistic Principal Component Analyzers Cédric Archambeau, Nicolas Delannay 2 and Michel Verleysen 2 - University College London, Dept. of Computer Science Gower Street, London WCE
Mixtures of Robust Probabilistic Principal Component Analyzers Cédric Archambeau, Nicolas Delannay 2 and Michel Verleysen 2 - University College London, Dept. of Computer Science Gower Street, London WCE
Principal Component Analysis. Applied Multivariate Statistics Spring 2012
 Principal Component Analysis Applied Multivariate Statistics Spring 2012 Overview Intuition Four definitions Practical examples Mathematical example Case study 2 PCA: Goals Goal 1: Dimension reduction
Principal Component Analysis Applied Multivariate Statistics Spring 2012 Overview Intuition Four definitions Practical examples Mathematical example Case study 2 PCA: Goals Goal 1: Dimension reduction
Cheng Soon Ong & Christian Walder. Canberra February June 2018
 Cheng Soon Ong & Christian Walder Research Group and College of Engineering and Computer Science Canberra February June 218 Outlines Overview Introduction Linear Algebra Probability Linear Regression 1
Cheng Soon Ong & Christian Walder Research Group and College of Engineering and Computer Science Canberra February June 218 Outlines Overview Introduction Linear Algebra Probability Linear Regression 1
Lecture: Face Recognition and Feature Reduction
 Lecture: Face Recognition and Feature Reduction Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab Lecture 11-1 Recap - Curse of dimensionality Assume 5000 points uniformly distributed
Lecture: Face Recognition and Feature Reduction Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab Lecture 11-1 Recap - Curse of dimensionality Assume 5000 points uniformly distributed
Statistical Machine Learning
 Statistical Machine Learning Christoph Lampert Spring Semester 2015/2016 // Lecture 12 1 / 36 Unsupervised Learning Dimensionality Reduction 2 / 36 Dimensionality Reduction Given: data X = {x 1,..., x
Statistical Machine Learning Christoph Lampert Spring Semester 2015/2016 // Lecture 12 1 / 36 Unsupervised Learning Dimensionality Reduction 2 / 36 Dimensionality Reduction Given: data X = {x 1,..., x
Degenerate Expectation-Maximization Algorithm for Local Dimension Reduction
 Degenerate Expectation-Maximization Algorithm for Local Dimension Reduction Xiaodong Lin 1 and Yu Zhu 2 1 Statistical and Applied Mathematical Science Institute, RTP, NC, 27709 USA University of Cincinnati,
Degenerate Expectation-Maximization Algorithm for Local Dimension Reduction Xiaodong Lin 1 and Yu Zhu 2 1 Statistical and Applied Mathematical Science Institute, RTP, NC, 27709 USA University of Cincinnati,
LINEAR MODELS FOR CLASSIFICATION. J. Elder CSE 6390/PSYC 6225 Computational Modeling of Visual Perception
 LINEAR MODELS FOR CLASSIFICATION Classification: Problem Statement 2 In regression, we are modeling the relationship between a continuous input variable x and a continuous target variable t. In classification,
LINEAR MODELS FOR CLASSIFICATION Classification: Problem Statement 2 In regression, we are modeling the relationship between a continuous input variable x and a continuous target variable t. In classification,
Unsupervised Learning Techniques Class 07, 1 March 2006 Andrea Caponnetto
 Unsupervised Learning Techniques 9.520 Class 07, 1 March 2006 Andrea Caponnetto About this class Goal To introduce some methods for unsupervised learning: Gaussian Mixtures, K-Means, ISOMAP, HLLE, Laplacian
Unsupervised Learning Techniques 9.520 Class 07, 1 March 2006 Andrea Caponnetto About this class Goal To introduce some methods for unsupervised learning: Gaussian Mixtures, K-Means, ISOMAP, HLLE, Laplacian
These slides follow closely the (English) course textbook Pattern Recognition and Machine Learning by Christopher Bishop
 course textbook Pattern Recognition and Machine Learning by Christopher Bishop") Music and Machine Learning (IFT68 Winter 8) Prof. Douglas Eck, Université de Montréal These slides follow closely the (English) course textbook Pattern Recognition and Machine Learning by Christopher Bishop
Music and Machine Learning (IFT68 Winter 8) Prof. Douglas Eck, Université de Montréal These slides follow closely the (English) course textbook Pattern Recognition and Machine Learning by Christopher Bishop
Advances in Computer Vision. Prof. Bill Freeman. Image and shape descriptors. Readings: Mikolajczyk and Schmid; Belongie et al.
 6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
6.869 Advances in Computer Vision Prof. Bill Freeman March 3, 2005 Image and shape descriptors Affine invariant features Comparison of feature descriptors Shape context Readings: Mikolajczyk and Schmid;
Lecture 13. Principal Component Analysis. Brett Bernstein. April 25, CDS at NYU. Brett Bernstein (CDS at NYU) Lecture 13 April 25, / 26
 Lecture 13 April 25, / 26") Principal Component Analysis Brett Bernstein CDS at NYU April 25, 2017 Brett Bernstein (CDS at NYU) Lecture 13 April 25, 2017 1 / 26 Initial Question Intro Question Question Let S R n n be symmetric. 1
Principal Component Analysis Brett Bernstein CDS at NYU April 25, 2017 Brett Bernstein (CDS at NYU) Lecture 13 April 25, 2017 1 / 26 Initial Question Intro Question Question Let S R n n be symmetric. 1
Application of Numerical Algebraic Geometry to Geometric Data Analysis
 Application of Numerical Algebraic Geometry to Geometric Data Analysis Daniel Bates 1 Brent Davis 1 Chris Peterson 1 Michael Kirby 1 Justin Marks 2 1 Colorado State University - Fort Collins, CO 2 Air
Application of Numerical Algebraic Geometry to Geometric Data Analysis Daniel Bates 1 Brent Davis 1 Chris Peterson 1 Michael Kirby 1 Justin Marks 2 1 Colorado State University - Fort Collins, CO 2 Air
Pattern Recognition and Machine Learning
 Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Conjugate Gradient algorithm. Storage: fixed, independent of number of steps.
 Conjugate Gradient algorithm Need: A symmetric positive definite; Cost: 1 matrix-vector product per step; Storage: fixed, independent of number of steps. The CG method minimizes the A norm of the error,
Conjugate Gradient algorithm Need: A symmetric positive definite; Cost: 1 matrix-vector product per step; Storage: fixed, independent of number of steps. The CG method minimizes the A norm of the error,
Lecture 8: Interest Point Detection. Saad J Bedros
 #1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal:
#1 Lecture 8: Interest Point Detection Saad J Bedros sbedros@umn.edu Review of Edge Detectors #2 Today s Lecture Interest Points Detection What do we mean with Interest Point Detection in an Image Goal: