UNIVERSITY OF CALIFORNIA. Los Angeles. Distributed Model Predictive Control of Nonlinear. and Two-Time-Scale Process Networks
|
|
|
- Lillian Elliott
- 6 years ago
- Views:
Transcription
1 UNIVERSITY OF CALIFORNIA Los Angeles Distributed Model Predictive Control of Nonlinear and Two-Time-Scale Process Networks A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in Chemical Engineering by Xianzhong Chen 2012
2
3 ABSTRACT OF THE DISSERTATION Distributed Model Predictive Control of Nonlinear and Two-Time-Scale Process Networks by Xianzhong Chen Doctor of Philosophy in Chemical Engineering University of California, Los Angeles, 2012 Professor Panagiotis D. Christofides, Chair Large-scale chemical process systems are characterized by highly nonlinear behavior and the coupling of physico-chemical phenomena occurring at disparate time scales. Examples include fluidized catalytic crackers, distillation columns, biochemical reactors as well as chemical process networks in which the individual processes evolve in a fast time-scale and the network dynamics evolve in a slow time-scale. Traditionally, the design of advanced model-based control systems for chemical processes has followed the centralized paradigm in which one control system is used to compute the control actions of all manipulated inputs. While the centralized paradigm to model-based process control has been successful, when the number of the process state variables, manipulated inputs and measurements in a chemical plant becomes large - a common occurrence in modern plants -, the computational time needed for the solution of the centralized control problem may increase significantly and may impede the ability of centralized control systems (particularly when nonlinear conii
4 strained optimization-based control systems like model predictive control-mpc are used), to carry out real-time calculations within the limits set by process dynamics and operating conditions. One feasible alternative to overcome this problem is to utilize cooperative, distributed control architectures in which the manipulated inputs are computed by solving more than one control (optimization) problems in separate processors in a coordinated fashion. Motivated by the above considerations, this dissertation presents rigorous, yet practical, methods for the design of distributed model predictive control systems for nonlinear and two-time-scale process networks. Beginning with a review of results on the subject, the first part of this dissertation presents the design of two, sequential and iterative, distributed MPC architectures via Lyapunov-based control techniques for general nonlinear process systems. Key practical issues like the feedback of asynchronous and delayed measurements as well as the utilization of cost functions that explicitly account for economic considerations are explicitly addressed in the formulation and design of the controllers and of their communication strategy. In the second part of the dissertation, we focus on the design of model predictive control systems for nonlinear two-times-scale process networks within the framework of singular perturbations. Both centralized and distributed MPC designs are presented. Throughout the thesis, the applicability, effectiveness and computational efficiency of the control methods are evaluated via simulations using numerous, large-scale chemical process networks. iii



5
6 Contents 1 Introduction Background Objectives and Organization of the Dissertation Sequential and Iterative Architectures for Distributed Model Predictive Control of Nonlinear Process Systems Introduction Preliminaries Control problem formulation Lyapunov-based controller Centralized LMPC Distributed model predictive control architectures Introduction Sequential distributed LMPC Iterative distributed LMPC Application to a chemical process Process description and modeling v
7 2.4.2 Simulation results Conclusions Sequential and Iterative Distributed Model Predictive Control of Nonlinear Systems: Handling Asynchronous and Delayed Measurements Introduction Preliminaries Problem formulation Lyapunov-based controller DMPC with asynchronous measurements Modeling of asynchronous measurement Sequential DMPC formulation Iterative DMPC formulation DMPC with delayed measurements Modeling of delayed measurements Iterative DMPC formulation Application to an alkylation of benzene process Process and control problem description Asynchronous measurements without delay Asynchronous measurements subject to delays Conclusions Distributed Economic MPC: Application to a Nonlinear Chemical vi
8 Process Network Introduction Preliminaries Notation Class of nonlinear systems Stabilizability assumptions Nonlinear chemical process network Description of the alkylation of benzene process Economic cost measure Distributed LEMPC Implementation strategy I Implementation strategy II Application to nonlinear chemical process network Preliminaries Centralized LEMPC Sequential distributed LEMPC Closed-loop simulation results Conclusions Model Predictive Control of Nonlinear Singularly Perturbed Systems: Application to a Large-Scale Process Network Introduction Preliminaries vii
9 5.2.1 Notation Class of nonlinear singularly perturbed systems Two-time-scale system decomposition Lyapunov-based controller Lyapunov-based MPC formulation Stability analysis Application to a nonlinear large-scale process network Process description and control system design Simulation results Conclusions Composite Fast-Slow MPC Design for Nonlinear Singularly Perturbed Systems Introduction Preliminaries Notation Class of nonlinear singularly perturbed systems Two-time-scale decomposition Slow-fast subsystem stabilizability assumptions Fast-Slow MPC design Lyapunov-based slow MPC formulation Lyapunov-based fast MPC formulation Stability analysis viii
10 6.5 Near Optimality Chemical Process Example Controller synthesis Closed-loop results Conclusions Conclusions 205 Bibliography 208 ix
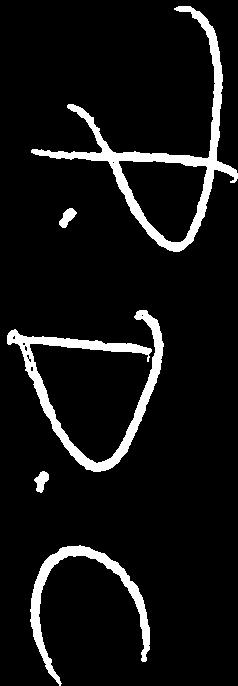
11 List of Figures 2.1 Distributed MPC scheme proposed in [65] Sequential distributed LMPC architecture Iterative distributed LMPC architecture Process flow diagram of alkylation of benzene Trajectories of the Lyapunov function V (x) of the alkylation of benzene process of Eqs under the controller h(x) of Eq implemented in a sample-and-hold fashion (solid line), the centralized LMPC of Eqs. 2.5 (dashed line), the sequential DMPC of Eqs. 2.7 (dash-dotted line) and the iterative DMPC of Eqs with c = 1 (dotted line) Total performance costs along the closed-loop trajectories of the alkylation of benzene process of Eqs under centralized LMPC of Eqs. 2.5 (dashed line), sequential DMPC of Eqs. 2.7 (dash-dotted line) and iterative DMPC of Eqs (solid line) Sequential DMPC for nonlinear systems subject to asynchronous measurements Iterative DMPC for nonlinear systems subject to asynchronous measurements A possible sequence of delayed measurements Iterative DMPC for nonlinear systems subject to delayed measurements Process flow diagram of alkylation of benzene x
12 3.6 Asynchronous measurement sampling times {t k 0 } with T m = 75 sec: the x axis indicates {t k 0 } and the y axis indicates the size of the interval between t k and t k Trajectories of the Lyapunov function under the Lyapunov-based controller h(x) implemented in a sample-and-hold fashion and with openloop state estimation, the iterative DMPC of Eqs with c max = 1 and c max = 5, the sequential DMPC of Eqs. 3.7 and the centralized LMPC in [80]: (a) V (x); (b) Log(V (x)) Asynchronous time sequence {t k 0 } and corresponding delay sequence {d k 0 } with T m = 50 sec and D = 40 sec: the x axis indicates {t k 0 } and the y axis indicates the size of d k Trajectories of the Lyapunov function under the Lyapunov-based controller h(x) implemented in a sample-and-hold fashion and with openloop state estimation, the iterative DMPC of Eqs with c max = 1 and c max = 5 and the centralized LMPC in [67]: (a) V (x); (b) Log(V (x)) Total performance cost along the closed-loop system trajectories of centralized LMPC in [67] (dashed line) and iterative DMPC of Eqs (solid line) Process flow diagram of alkylation of benzene Weight percentage on the terms of the economic measure used by the steady-state optimization problem Distributed LEMPC architecture Distributed controller evaluation sequence Trajectories of the economic measure and of the Lyapunov function using the centralized LMPC with conventional quadratic cost of Eq (solid line), the centralized LEMPC (dashed line) at mode two, and the DLEMPC (dotted line) at mode two. The prediction horizon N = xi
13 4.6 The total evaluation time needed for evaluation of each MPC method. Centralized LMPC with conventional quadratic cost of Eq (dotted line with squares), the centralized LEMPC (dashed line with circles) at mode two, and the DLEMPC (solid line with asterisks) at mode two. The prediction horizon N = Trajectories of the economic measure and of the Lyapunov function using the centralized LMPC with conventional quadratic cost of Eq (solid line), the centralized LEMPC (dashed line) at mode one, and the DLEMPC (dotted line) at mode one. The prediction horizon N = 3, and the level set ρ e = The total evaluation time needed for each evaluation of centralized LEMPC (dashed line with circles) at mode one and DLEMPC (solid line with asterisks) at mode one. The prediction horizon N = Trajectories of the economic measure and of the Lyapunov function by centralized LMPC with conventional quadratic cost of Eq (solid line), the centralized LEMPC (dashed line), and the DLEMPC (dot line). The last two operate at mode one up to t = 1500 s ans subsequently at mode two. The prediction horizon N = 3, and the level set ρ e = The total evaluation time needed for each evaluation of MPC method corresponding to Fig Centralized LMPC with conventional quadratic cost of Eq (dotted line with squares), the centralized LEMPC (dashed line with circles), and DLEMPC (solid line with asterisks). The prediction horizon N = A schematic of the proposed control system structure Chemical process network schematic Sequential DMPC architecture manipulating u 5, u 6 and u Iterative DMPC architecture manipulating u 5, u 6 and u Trajectories of V (x) under the centralized LMPC ( ), the sequential DMPC ( ), and the iterative DMPC with one evaluation ( ) and with two evaluations ( ) xii
14 5.6 Trajectories of the input Q 1 (i.e., u 5 ) under the centralized LMPC ( ), the sequential DMPC ( ), and the iterative DMPC with one evaluation ( ) and with two evaluations ( ) Trajectories of the input Q 2 (i.e., u 6 ) under the centralized LMPC ( ), the sequential DMPC ( ), and the iterative DMPC with one evaluation ( ) and with two evaluations ( ) Trajectories of the input Q 3 (i.e., u 7 ) under the centralized LMPC ( ), the sequential DMPC ( ), and the iterative DMPC with one evaluation ( ) and with two evaluations ( ) The costs of the closed-loop system under the centralized LMPC ( ), the sequential DMPC ( ), and the iterative DMPC with one evaluation ( ) and with two evaluations ( ) The total evaluation time needed for each evaluation of each MPC method. Centralized LMPC (solid line with ), sequential DMPC (dashed line with ), and iterative DMPC with one evaluation (dotted line with ). The prediction horizon N = The total evaluation time needed for each evaluation of each MPC method. Centralized LMPC (solid line with ), sequential DMPC (dashed line with ), and iterative DMPC with one evaluation (dotted line with ). The prediction horizon N = Evolution of a measure of the liquid hold-ups (ρ f (t); + symbol) and evolution of a measure of the compositions (ρ s (t); o symbol) A schematic of the composite control system using MPC in both the fast and slow time-scales Diagram of chemical process example and fast-slow MPC architecture Performance cost of each controller design based on Eq. 6.42a: the centralized LMPC design (dotted-solid line with plus), the slow LMPC design (dashed line with circles) with the fast proportional controller using P f = 1s, and the slow LMPC design (solid line with asterisks) with the fast proportional controller using P f = 0.001s xiii
15 6.4 Fast-slow LMPC performance: (a) performance cost, J f, of the fast LMPC, (b) performance cost, J s, of the slow LMPC and (c) overall cost, J The total evaluation time needed for each evaluation of the control action by the centralized LMPC design (dashed-dotted line with plus) and by the fast LMPC of the fast-slow LMPC design (dashed line with circles) The total evaluation time needed for each evaluation of the control action by the centralized LMPC design (dashed-dotted line with plus) and by the slow LMPC of the fast-slow LMPC design (dotted line with asterisks) xiv
16 List of Tables 2.1 Process variables of the alkylation of benzene process of Eqs Parameter values of the alkylation of benzene process of Eqs Steady-state input values for x s of the alkylation of benzene process of Eqs Steady-state values for x s of the alkylation of benzene process of Eqs Manipulated input constraints of the alkylation of benzene process of Eqs Initial state values of the alkylation of benzene process of Eqs Mean evaluation time of different LMPC optimization problems for 100 evaluations Total performance costs along the closed-loop trajectories I of the alkylation of benzene process of Eqs Total performance costs along the closed-loop trajectories II of the alkylation of benzene process of Eqs Total performance costs along the closed-loop trajectories III of the alkylation of benzene process of Eqs Steady-state input values Manipulated input constraints Optimal steady-state input values xv
17 4.4 Manipulated input constraints for all controllers Average Control Action Evaluation Time Process variables Parameter values Process parameters Final steady-state manipulated input values Final steady-state values of the states of CSTR, reboiler and condenser Initial steady-state manipulated input values Initial steady state values of the states of CSTR, reboiler and condenser Process variables Process values Initial steady-state and final steady-state manipulated input values. 195 xvi
18 ACKNOWLEDGEMENTS I would like to thank my advisors, Professor Panagiotis D. Christofides and Professor James F. Davis, for their guidance and support throughout the course of the thesis. I would like to thank Professor Gerassimos Orkoulas and Professor Tsu-Chin Tsao for agreeing to participate in my doctoral committee. Financial support from the National Science Foundation and from the UCLA Graduate Division is gratefully acknowledged. I would like to express my deepest gratitude to my parents, Shanhui Chen and Jiamei Li, for their encouragement, patience and support. xvii
19 VITA 2008 Bachelor of Science, Chemical Engineering Department of Chemical and Biomolecular Engineering University of California, Los Angeles 2010 Master of Science, Chemical Engineering Department of Chemical and Biomolecular Engineering University of California, Los Angeles Ph.D Candidate Department of Chemical and Biomolecular Engineering University of California, Los Angeles Teaching Assistant/Associate/Fellow Department of Chemical and Biomolecular Engineering University of California, Los Angeles PUBLICATIONS AND PRESENTATIONS 1. X. Chen, M. Heidarinejad, J. Liu, and P. D. Christofides. Composite Fast-Slow MPC Design for Nonlinear Singularly Perturbed Systems. AIChE Journal, 58: , X. Chen, M. Heidarinejad, J. Liu, and P. D. Christofides. Distributed Economic MPC: Application to a Nonlinear Chemical Process Network. Journal of Process Control, 22: , X. Chen, M. Heidarinejad, J. Liu, D. Muñoz de la Peña, and P. D. Christofides. Model Predictive Control of Nonlinear Singularly Perturbed Systems: Application to a Large-Scale Process Network. Journal of Process Control, 21: , J. Liu, X. Chen, D. Muñoz de la Peña, and P. D. Christofides. Sequential and Iterative Architectures for Distributed Model Predictive Control of Nonlinear Process Systems. AIChE Journal, 56: , J. Liu, X. Chen, D. Muñoz de la Peña, and P. D. Christofides. Iterative Distributed Model Predictive Control of Nonlinear Systems: Handling Asynchronous, Delayed Measurements. IEEE Transactions on Automatic Control, 57: , xviii
20 6. W. Qi, J. Liu, X. Chen, and P. D. Christofides. Supervisory Predictive Control of Stand-alone Wind-Solar Energy Generation Systems. IEEE Transactions on Control Systems Technology, 19: , X. Chen, M. Heidarinejad, J. liu, and P. D. Christofides. Composite Fast-slow MPC Design for Nonlinear Singularly Perturbed Systems. Proceeding of the Amercian Control Conference, in press, X. Chen, M. Heidarinejad, J. Liu, D. Muñoz de la Peña, and P. D. Christofides. Model Predictive Control of Nonlinear Singularly Perturbed Systems: Application to a Reactor-Separator Process Network. Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference, pages , Orlando, Florida, X. Chen, J. Liu, D. Muñoz de la Peña, and P. D. Christofides. Sequential and Iterative Distributed Model Predictive Control of Nonlinear Process Systems Subject to Asynchronous Measurements. Proceedings of the 9th International Symposium on Dynamics and Control of Process Systems, pages , Leuven, Belgium, X. Chen, J. Liu, D. Muñoz de la Peña, and P. D. Christofides. Distributed Model Predictive Control of Two-Time-Scale Nonlinear Systems. AIChE Annual Meeting, paper 393e, Salt Lake City, Utah, J. Liu, X. Chen, D. Muñoz de la Peña, and P. D. Christofides. Architecture for Distributed Model Predictive Control of Nonlinear Process Systems. AIChE Annual Meeting, paper 504c, Nashville, Tennessee, J. Liu, X. Chen, D. Muñoz de la Peña, and P. D. Christofides. Distributed Model Predictive Control of Nonlinear Systems: Handling Delayed Measurements. AIChE Annual Meeting, paper 586e, Salt Lake City, Utah, J. Liu, X. Chen, D. Muñoz de la Peña, and P. D. Christofides. Sequential and Iterative Architectures for Distributed Model Predictive Control of Nonlinear Process Systems. Part I: Theory. Proceedings of the American Control Conference, , Baltimore, Maryland, 2010 (Best Presentation in Session Award). 14. J. Liu, X. Chen, D. Muñoz de la Peña, and P. D. Christofides. Sequential and Iterative Architectures for Distributed Model Predictive Control of Nonlinear Process Systems. Part II: Application to a Catalytic Alkylation of Benzene Process. Proceedings of the American Control Conference, , Baltimore, Maryland, xix
21 Chapter 1 Introduction 1.1 Background Chemical processes and plants are characterized by nonlinear behavior and strong coupling of physico-chemical phenomena occurring at disparate time-scales. Examples include fluidized catalytic crackers, distillation columns, biochemical reactors as well as chemical process networks in which the individual processes evolve in a fast timescale and the network dynamics evolve in a slow time-scale. The nonlinear behavior of many chemical processes has motivated extensive research on nonlinear process control with the emphasis being primarily on the design of centralized nonlinear control systems (see, for example, [56, 6, 107, 41, 76, 15] for results and references in this area). In addition to nonlinear behavior, industrial process models are characterized by the presence of unknown process parameters and external disturbances which, if not accounted for in the controller design, may cause performance deterioration and even closed-loop instability. This realization has motivated numerous studies on the problem of designing controllers for uncertain nonlinear sys- 1
22 tems (e.g., [23, 51, 73, 49, 18]). The problems caused by input constraints have also motivated numerous studies on the dynamics and control of systems subject to input constraints. Important contributions include results on optimization-based methods such as model predictive control (e.g., [36, 88, 98, 76, 1]) and Lyapunov-based control (e.g., [59, 96, 48, 97, 94, 53]). Earlier work of our group developed [28, 29, 18] a unified framework for model-based control of continuous-time nonlinear processes with uncertainty and input constraints. This framework adopts a Lyapunov-based approach and leads to the synthesis of robust nonlinear controllers that possess an explicitly characterized region of guaranteed closed-loop stability. Subsequently, we used these results to develop a hybrid predictive control structure that employs switching between Lyapunov-based control and model predictive control (MPC) for stabilization of nonlinear systems with uncertainty and input constraints [31, 78]. The hybrid predictive control structure embeds the implementation of MPC within the stability region of a Lyapunov-based bounded controller which serves as a fall-back controller that can be switched to in the event of infeasibility or instability of MPC. We also note here important other work on a diverse array of hybrid system issues including modeling (e.g., [106, 4]), simulation (e.g., [4, 37]), optimization (e.g., [33, 39, 38, 8, 7]), stability analysis (e.g., [109, 42, 25]), and control (e.g., [5, 43, 55, 32, 30, 81]); all of these results, however, deal with the design of centralized control systems. While the centralized paradigm to model-based process control has been successful, when the number of the process state variables, manipulated inputs and measurements in a chemical plant becomes large - a common occurrence in modern plants -, the computational time needed for the solution of the centralized control problem may increase significantly and may impede the ability of centralized control systems (particularly when nonlinear constrained optimization-based control systems like model predictive control-mpc are used), to carry out real-time calculations within the limits 2
23 set by process dynamics and operating conditions. One feasible alternative to overcome this problem is to utilize cooperative, distributed control architectures in which the manipulated inputs are computed by solving more than one control (optimization) problems in separate processors in a coordinated fashion. With respect to available results in this direction, several distributed MPC methods have been proposed in the literature that deal with the coordination of separate MPC controllers that communicate in order to obtain optimal input trajectories in a distributed manner; see [10, 89, 92] for reviews of results in this area. More specifically, in [27], the problem of distributed control of dynamically coupled nonlinear systems that are subject to decoupled constraints was considered. In [91, 46], the effect of the coupling was modeled as a bounded disturbance compensated using a robust MPC formulation. In [100], it was proven that through multiple communications between distributed controllers and using system-wide control objective functions, stability of the closed-loop system can be guaranteed. In [50], distributed MPC of decoupled systems (a class of systems of relevance in the context of multi-agents systems) was studied. In [72], an MPC algorithm was proposed under the main condition that the system is nonlinear, discrete-time and no information is exchanged between local controllers, and in [85], MPC for nonlinear systems was studied from an input-to-state stability point of view. In [71], a game theory based distributed MPC scheme for constrained linear systems was proposed. Time-scale multiplicity is a common feature of many chemical processes and plants of industrial interest and usually arises due to the strong coupling of physico-chemical phenomena, like slow and fast reactions, occurring at disparate time-scales. In addition to this, the dynamics of control actuation and measurement sensing systems very often adds a fast-dynamics layer in the closed-loop system. The analysis and controller design problems for multiple-time-scale systems are usually addressed within 3
24 the mathematical framework of singular perturbations (e.g., [54]). Within this framework, a variety of explicit controller design methods have been primarily developed for both linear and nonlinear singularly perturbed systems, ranging from optimal control [54] to geometric control (e.g., [16, 57]) and Lyapunov-based control [21]. In the context of MPC of singularly perturbed systems, most of the efforts have been dedicated to linear systems [104] or to MPC of specific classes of two-time-scale processes [9, 99]. In a recent work [12], we studied MPC for nonlinear singularly perturbed systems where MPC is used only in the slow time-scale and the fast dynamics are assumed to be stabilizable by a fast explicit controller. Finally, in another recent set of papers [3, 70], MPC of two-time-scale processes described by nonlinear singularly perturbed systems in non-standard form (i.e., systems in which the separation of slow and fast state variables is not explicit in the original coordinates and a coordinate change should be used to obtain a singularly perturbed system in standard form) was addressed; in these works the fast dynamics are also assumed to be stabilizable by a fast explicit controller. 1.2 Objectives and Organization of the Dissertation Motivated by the potential benefit of distributed control systems to regulate complex process networks, the objectives of this dissertation are summarized below: 1. To develop distributed predictive control methods for large-scale nonlinear process networks taking into account asynchronous and time-varying delayed measurements. 2. To develop distributed economic predictive control methods for large-scale non- 4
25 linear process networks. 3. To develop model predictive control methods for two-time-scale process networks. The dissertation is organized as follows. In Chapter 2, we focus on distributed model predictive control of large scale nonlinear process systems in which several distinct sets of manipulated inputs are used to regulate the process. For each set of manipulated inputs, a different model predictive controller is used to compute the control actions, which is able to communicate with the rest of the controllers in making its decisions. Under the assumption that feedback of the state of the process is available to all the distributed controllers at each sampling time and a model of the plant is available, we propose two different distributed model predictive control architectures. In the first architecture, the distributed controllers use a one-directional communication strategy, are evaluated in sequence and each controller is evaluated only once at each sampling time; in the second architecture, the distributed controllers utilize a bi-directional communication strategy, are evaluated in parallel and iterate to improve closed-loop performance. In the design of the distributed model predictive controllers, Lyapunov-based model predictive control techniques are used. In order to ensure the stability of the closed-loop system, each model predictive controller in both architectures incorporates a stability constraint which is based on a suitable Lyapunov-based controller. We prove that the proposed distributed model predictive control architectures enforce practical stability in the closed-loop system and optimal performance. The theoretical results are illustrated through a catalytic alkylation of benzene process example. In Chapter 3, we propose sequential and iterative DMPC schemes for large scale nonlinear systems subject to asynchronous and delayed state feedback [64, 14, 62]. In 5
26 the case of asynchronous feedback, under the assumption that there is an upper bound on the maximum interval between two consecutive measurements, we first extend the results obtained in Chapter 2 for sequential DMPC to include asynchronous feedback, and then re-design the iterative DMPC scheme presented in Chapter 2 to take explicitly into account asynchronous feedback. Subsequently, we design an iterative DMPC scheme for systems subject to asynchronous feedback that also involves time-delays under the assumption that there exists an upper bound on the maximum feedback delay. This design takes advantage of the bi-directional communication network used in the iterative DMPC framework. Sufficient conditions under which the proposed distributed control designs guarantee that the states of the closed-loop system are ultimately bounded in regions that contain the origin are provided. The theoretical results are illustrated through a catalytic alkylation of benzene process example. In Chapter 4, we focus on the development and application of distributed and centralized Lyapunov economic MPC designs to a catalytic alkylation of benzene process network, which consists of four continuously stirred tank reactors and a flash separator. A new economic measure for the entire process network is proposed which accounts for a broad set of economic considerations on the process operation including reaction conversion, separation quality and energy efficiency. Subsequently, steady-state process optimization is first carried out to locate an economically optimal (with respect to the proposed economic measure) operating steady-state. Then, a sequential distributed economic model predictive control design method, suitable for large-scale process networks, is proposed and its closed-loop stability properties are established. Using the proposed method, economic, distributed as well as centralized, model predictive control systems are designed and are implemented on the process to drive the closed-loop system state close to the economically optimal steady-state. The closed-loop performance and time needed for control action calculation are evaluated 6
27 through simulations and compared with the ones of a centralized Lyapunov-based model predictive control design, which uses a conventional, quadratic cost function that includes penalty on the deviation of the states and inputs from their economically optimal steady-state values. In Chapter 5, we focus on model predictive control of nonlinear singularly perturbed systems in standard form where the separation between the fast and slow state variables is explicit. A composite control system using multirate sampling (i.e., fast sampling of the fast state variables and slow sampling of the slow state variables) and consisting of a fast feedback controller that stabilizes the fast dynamics and a model predictive controller that stabilizes the slow dynamics and enforces desired performance objectives in the slow subsystem is designed. Using stability results for nonlinear singularly perturbed systems, the closed-loop system is analyzed and sufficient conditions for stability are derived. A large-scale nonlinear reactor-separator process network is used to demonstrate the application of the method including a distributed implementation of the predictive controller. In Chapter 6, a composite control system comprised of a fast MPC acting to regulate the fast dynamics and a slow MPC acting to regulate the slow dynamics is designed. The composite MPC system uses multirate sampling of the plant state measurements, i.e., fast sampling of the fast state variables is used in the fast MPC and slow-sampling of the slow state variables is used in the slow MPC as well as in the fast MPC. Using singular perturbation theory, the stability and optimality of the closed-loop nonlinear singularly perturbed system are analyzed. The proposed fastslow MPC design does not require communication between the two MPCs, and thus, it can be classified as decentralized in nature. A chemical process example which exhibits two-time-scale behavior is used to demonstrate the structure and implemen- 7
28 tation of the fast-slow MPC architecture in a practical setting. Extensive simulations are carried out to assess the performance and computational efficiency of the fast-slow MPC system. Chapter 7 summaries the main results of the dissertation and discusses future research possibilities in distributed control system design. 8
29 Chapter 2 Sequential and Iterative Architectures for Distributed Model Predictive Control of Nonlinear Process Systems 2.1 Introduction Model predictive control (MPC) is a popular control strategy based on using a model of the process to predict at each sampling time the future evolution of the system from the current state along a given prediction horizon. Using these predictions, the manipulated input trajectory that minimizes a given performance index is computed solving a suitable optimization problem. To obtain finite dimensional optimization problems, MPC optimizes over a family of piecewise constant trajectories with a fixed sampling time and a finite prediction horizon. Once the optimization problem 9
30 is solved, only the first manipulated input value is implemented, discarding the rest of the trajectory and repeating the optimization in the next sampling step [36, 86]. Typically, MPC is studied from a centralized control point of view in which all the manipulated inputs of a control system are optimized with respect to an objective function in a single optimization problem. When the number of the state variable and manipulated inputs of the process, however, becomes large, the computational burden of the centralized optimization problem may increase significantly and may impede the applicability of a centralized MPC, especially in the case where nonlinear process models are used in the MPC. One feasible alternative to overcome this problem is to utilize a distributed MPC architecture in which the manipulated inputs are computed by more than one optimization problems in a coordinated fashion. With respect to available results on distributed MPC architectures, several distributed MPC methods have been proposed in the literature that deal with the coordination of separate MPC controllers that communicate in order to obtain optimal input trajectories in a distributed manner; see [10, 89, 92] for reviews of results in this area. In [65], a distributed MPC architecture with one-directional communication was proposed for general nonlinear process systems. In this architecture, two separate MPC controllers designed via Lyapunov-based MPC (LMPC) were considered, in which one LMPC was used to guarantee the stability of the closed-loop system and the other LMPC was used to improve the closed-loop performance. Generally, the computational burden of these distributed MPC methods is smaller compared to the one of the corresponding centralized MPC because of the formulation of optimization problems with a smaller number of decision variables. In this chapter, we focus on distributed model predictive control of large scale nonlinear process systems in which several distinct sets of manipulated inputs are used to regulate the process [63]. For each set of manipulated inputs, a different 10
31 model predictive controller is used to compute the control actions, which is able to communicate with the rest of the controllers in making its decisions. Under the assumption that feedback of the state of the process is available to all the distributed controllers at each sampling time and a model of the plant is available, we propose two different distributed model predictive control architectures designed via LMPC techniques. In the first architecture, the distributed controllers use a one-directional communication strategy, are evaluated in sequence and each controller is evaluated only once at each sampling time; in the second architecture, the distributed controllers utilize a bi-directional communication strategy, are evaluated in parallel and iterate to improve closed-loop performance. In order to ensure the stability of the closedloop system, each model predictive controller in both architectures incorporates a stability constraint which is based on a suitable Lyapunov-based controller. We prove that the proposed distributed model predictive control architectures enforce practical stability in the closed-loop system and optimal performance. The theoretical results are illustrated through a catalytic alkylation of benzene process example. 2.2 Preliminaries Control problem formulation We consider nonlinear process systems described by the following state-space model: ẋ(t) = f(x(t)) + m g i (x(t))u i (t) + k(x(t))w(t) (2.1) i=1 where x(t) R nx denotes the vector of process state variables, u i (t) R mu i, i = 1,..., m, are m sets of control (manipulated) inputs and w(t) R n w denotes the vec- 11
32 tor of disturbance variables. The m sets of inputs are restricted to be in m nonempty convex sets U i R mu i, i = 1,..., m, which are defined as follows: U i := {u i R m u i : ui u max i }, i = 1,..., m where u max i, i = 1,..., m, are the magnitudes of the input constraints. The disturbance vector is bounded, i.e., w(t) W where W := {w R nw : w θ, θ > 0}. We assume that f, g i, i = 1,..., m, and k are locally Lipschitz vector functions and that the origin is an equilibrium of the unforced nominal system (i.e., system of Eq. 2.1 with u i (t) = 0, i = 1,..., m, w(t) = 0 for all t) which implies that f(0) = 0. We also assume that the state x of the system is sampled synchronously and the time instants at which we have state measurement samplings are indicated by the time sequence {t k 0 } with t k = t 0 + k, k = 0, 1,... where t 0 is the initial time and is the sampling time. Remark 2.1 In general, distributed control systems are formulated based on the assumption that the controlled process systems consist of decoupled or partially coupled subsystems. However, we consider a fully coupled process model; this is a very common occurrence in chemical process control as we will illustrate in the example of section 2.4. In our future work, we will extend the proposed distributed control systems to the case in which only local state information is available to each distributed controller based on distributed state estimation. Remark 2.2 Note that the assumption that f, g i, i = 1,..., m and k are locally denotes Euclidean norm of a vector. 12
33 Lipschitz vector functions is a reasonable assumption for most of chemical processes. Note also that the assumption that the state x of the system is sampled synchronously is a widely used assumption in process control research. The proposed control system designs can be extended to the case where only part of the state x is measurable by designing an observer to estimate the whole state vector from output measurements and by designing the control system based on the measured and estimated states. In this case, the stability properties of the resulting output feedback control systems are affected by the convergence of the observer and need to be carefully studied Lyapunov-based controller We assume that there exists a Lyapunov-based controller h(x) = [h 1 (x)... h m (x)] T with u i = h i (x), i = 1,..., m, which renders the origin of the nominal closed-loop system asymptotically stable while satisfying the input constraints for all the states x inside a given stability region. We note that this assumption is essentially equivalent to the assumption that the process is stabilizable or that the pair (A, B) in the case of linear systems is stabilizable. Using converse Lyapunov theorems [75, 60, 18], this assumption implies that there exist functions α i ( ), i = 1, 2, 3, 4 of class K and a continuously differentiable Lyapunov function V (x) for the nominal closed-loop A continuous function α : [0, a) [0, ) is said to belong to class K if it is strictly increasing and α(0) = 0. 13
34 system, that satisfy the following inequalities: V (x) x α 1 ( x ) V (x) α 2 ( x ) m (f(x) + g i (x)h i (x)) α 3 ( x ) i=1 V (x) x α 4( x ) h i (x) U i, i = 1,..., m (2.2) for all x D R nx where D is an open neighborhood of the origin. We denote the region Ω ρ D as the stability region of the closed-loop system under the Lyapunovbased controller h(x). The construction of V (x) can be carried out in a number of ways using systematic techniques like, for example, sum-of-squares methods. By continuity, the local Lipschitz property assumed for the vector fields f, g i, i = 1,..., m, and k and taking into account that the manipulated inputs u i, i = 1,..., m, and the disturbance w are bounded in convex sets, there exists a positive constant M such that m f(x) + g i (x)u i + k(x)w M (2.3) i=1 for all x Ω ρ, u i U i, i = 1,..., m, and w W. In addition, by the continuous differentiable property of the Lyapunov function V (x) and the Lipschitz property assumed for the vector field f, there exist positive constants L x, L ui, i = 1,..., m, and L w such that V V f(x) x x f(x ) L x x x V x g i(x) V x g i(x ) L ui x x, i = 1,..., m V x k(x) L w We use Ω ρ to denote the set Ω ρ := {x R n x V (x) ρ}. (2.4) 14
35 for all x, x Ω ρ, u i U i, i = 1,..., m, and w W. Remark 2.3 Different state feedback control laws for nonlinear systems have been developed using Lyapunov techniques; the reader may refer to [59, 53, 18, 28, 29] for results in this area including results on the design of bounded Lyapunov-based controllers by taking explicitly into account input constraints for broad classes of nonlinear systems Centralized LMPC To take advantage of all the sets of manipulated inputs, one option is to design a centralized MPC controller. In order to guarantee robust stability of the closed-loop system, the MPC controller must include a set of stability constraints. To do this, we propose to use the LMPC controller proposed in [77, 79] which guarantees practical stability of the closed-loop system, allows for an explicit characterization of the stability region and yields a reduced complexity optimization problem. LMPC is based on uniting receding horizon control with control Lyapunov functions and computes the manipulated input trajectory solving a finite horizon constrained optimal control problem. The LMPC controller is based on the Lyapunov-based controller h(x). The controller h(x) is used to define a stability constraint for the LMPC controller which guarantees that the LMPC controller inherits the stability and robustness properties of the Lyapunov-based controller h(x). The LMPC controller introduced in [77, 79] is based on the following optimization problem: min u c1...u cm S( ) N 0 [ x T (τ)q c x(τ) + m u T ci(τ)r ci u ci (τ)]dτ i=1 (2.5a) s.t. x(τ) = f( x(τ)) + m g i ( x(τ))u ci i=1 (2.5b) 15
36 u ci (τ) U i, i = 1,..., m (2.5c) x(0) = x(t k ) (2.5d) m i=1 V (x) x g i(x(t k ))u ci (0) m i=1 V (x) x g i(x(t k ))h i (x(t k )) (2.5e) where S( ) is the family of piece-wise constant functions with sampling period, N is the prediction horizon, Q c and R ci, i = 1,..., m, are positive definite weight matrices that define the cost, x(t k ) is the state measurement obtained at t k, x is the predicted trajectory of the nominal system with u i, i = 1,..., m, the input trajectory computed by the LMPC of Eq The optimal solution to this optimization problem is denoted by u ci(τ t k ), i = 1,..., m, which is defined for τ [0, N ). The LMPC controller is implemented with a receding horizon method; that is, at each sampling time t k, the new state x(t k ) is received from the sensors, the optimization problem of Eq. 2.5 is solved, and u ci(t t k t k ), i = 1,..., m are applied to the closed-loop system for t [t k, t k+1 ). The optimization problem of Eq. 2.5 does not depend on the uncertainty and guarantees that the system in closed-loop with the LMPC controller of Eq. 2.5 maintains the stability properties of the Lyapunov-based controller. The constraint of Eq. 2.5e guarantees that the value of the time derivative of the Lyapunov function at the initial evaluation time of the centralized LMPC controller is lower or equal to the value obtained if only the Lyapunov-based controller h(x) is implemented in the closed-loop system in a sample-and-hold fashion. This is the constraint that allows proving that the centralized LMPC controller inherits the stability and robustness properties of the Lyapunov-based controller. The manipulated inputs of the closed-loop system under the above centralized 16
37 Process x u 2 LMPC 2 u 1 LMPC 1 Sensors Figure 2.1: Distributed MPC scheme proposed in [65]. x LMPC controller are defined as follows u i (t) = u ci(t t k t k ), i = 1,..., m, t [t k, t k+1 ). (2.6) In what follows, we refer to this controller as the centralized LMPC. The main property of the centralized LMPC controller is that the origin of the closed-loop system is practically stable for all initial states inside the stability region Ω ρ for a sufficient small sampling time and disturbance upper bound θ. This property is also guaranteed by the Lyapunov-based controller h(x) when the controllers are implemented in a sample-and-hold fashion (see [22, 82] for results on sampled-data systems). The main advantage of LMPC approaches with respect to the Lyapunov-based controller is that optimality considerations can be taken explicitly into account (as well as constraints on the inputs and the states [79]) in the computation of the controller within an online optimization framework improving closed-loop performance. 17
38 2.3 Distributed model predictive control architectures Introduction In a previous work of our group [65], a distributed MPC architecture for nonlinear process systems based on the scheme shown in Fig. 2.1 was introduced. In this distributed MPC architecture, two MPC controllers designed via LMPC were considered. One of the two LMPC controllers (LMPC 1) was designed to guarantee the stability of the closed-loop system and the other LMPC controller (LMPC 2) was designed to improve the closed-loop performance while maintaining the closed-loop stability achieved by LMPC 1. This distributed MPC architecture required onedirectional communication between the two distributed controllers and was proved that it guarantees practical stability of the closed-loop system and has the potential to maintain the closed-loop stability and performance in the face of new or failing controllers or actuators (for example, a zero input of LMPC 2 does not affect the closed-loop stability) and to reduce computational burden in the evaluation of the optimal manipulated inputs compared with a fully centralized LMPC controller of the same input/output-space dimension. In this study, our objective is to extend our results in [65] and propose distributed MPC architectures including multiple MPCs for large scale nonlinear process systems. Specifically, we propose two different distributed MPC architectures. The first distributed MPC architecture is a direct extension of our previous work in [65] in which different MPC controllers are evaluated in sequence, only once at each sampling time and require only one-directional communication between consecutive distributed controllers (i.e., the distributed controllers are connected by pairs). In the second ar- 18
UNIVERSITY OF CALIFORNIA Los Angeles. Data-Based Monitoring and Fault-Tolerant Control of Nonlinear Processes
 UNIVERSITY OF CALIFORNIA Los Angeles Data-Based Monitoring and Fault-Tolerant Control of Nonlinear Processes A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of
UNIVERSITY OF CALIFORNIA Los Angeles Data-Based Monitoring and Fault-Tolerant Control of Nonlinear Processes A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of
MOST control systems are designed under the assumption
 2076 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008 Lyapunov-Based Model Predictive Control of Nonlinear Systems Subject to Data Losses David Muñoz de la Peña and Panagiotis D. Christofides
2076 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 53, NO. 9, OCTOBER 2008 Lyapunov-Based Model Predictive Control of Nonlinear Systems Subject to Data Losses David Muñoz de la Peña and Panagiotis D. Christofides
Journal of Process Control
 Journal of Process Control 3 (03) 404 44 Contents lists available at SciVerse ScienceDirect Journal of Process Control j ourna l ho me pag e: www.elsevier.com/locate/jprocont Algorithms for improved fixed-time
Journal of Process Control 3 (03) 404 44 Contents lists available at SciVerse ScienceDirect Journal of Process Control j ourna l ho me pag e: www.elsevier.com/locate/jprocont Algorithms for improved fixed-time
Distributed Model Predictive Control: A Tutorial Review
 Distributed Model Predictive Control: A Tutorial Review Panagiotis D. Christofides, Riccardo Scattolini, David Muñoz de la Peña and Jinfeng Liu Abstract In this paper, we provide a tutorial review of recent
Distributed Model Predictive Control: A Tutorial Review Panagiotis D. Christofides, Riccardo Scattolini, David Muñoz de la Peña and Jinfeng Liu Abstract In this paper, we provide a tutorial review of recent
UNIVERSITY OF CALIFORNIA. Los Angeles. Economic Model Predictive Control Using Data-Based Empirical Models
 UNIVERSITY OF CALIFORNIA Los Angeles Economic Model Predictive Control Using Data-Based Empirical Models A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy
UNIVERSITY OF CALIFORNIA Los Angeles Economic Model Predictive Control Using Data-Based Empirical Models A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy
FAULT-TOLERANT CONTROL OF CHEMICAL PROCESS SYSTEMS USING COMMUNICATION NETWORKS. Nael H. El-Farra, Adiwinata Gani & Panagiotis D.
 FAULT-TOLERANT CONTROL OF CHEMICAL PROCESS SYSTEMS USING COMMUNICATION NETWORKS Nael H. El-Farra, Adiwinata Gani & Panagiotis D. Christofides Department of Chemical Engineering University of California,
FAULT-TOLERANT CONTROL OF CHEMICAL PROCESS SYSTEMS USING COMMUNICATION NETWORKS Nael H. El-Farra, Adiwinata Gani & Panagiotis D. Christofides Department of Chemical Engineering University of California,
Monitoring and Handling of Actuator Faults in a Distributed Model Predictive Control System
 American Control Conference Marriott Waterfront, Baltimore, MD, USA June -July, ThA.6 Monitoring and Handling of Actuator Faults in a Distributed Model Predictive Control System David Chilin, Jinfeng Liu,
American Control Conference Marriott Waterfront, Baltimore, MD, USA June -July, ThA.6 Monitoring and Handling of Actuator Faults in a Distributed Model Predictive Control System David Chilin, Jinfeng Liu,
UNIVERSITY OF CALIFORNIA Los Angeles. Data-based Fault Detection and Isolation for Nonlinear Process Systems Using Feedback Control
 UNIVERSITY OF CALIFORNIA Los Angeles Data-based Fault Detection and Isolation for Nonlinear Process Systems Using Feedback Control A dissertation submitted in partial satisfaction of the requirements for
UNIVERSITY OF CALIFORNIA Los Angeles Data-based Fault Detection and Isolation for Nonlinear Process Systems Using Feedback Control A dissertation submitted in partial satisfaction of the requirements for
Prashant Mhaskar, Nael H. El-Farra & Panagiotis D. Christofides. Department of Chemical Engineering University of California, Los Angeles
 HYBRID PREDICTIVE OUTPUT FEEDBACK STABILIZATION OF CONSTRAINED LINEAR SYSTEMS Prashant Mhaskar, Nael H. El-Farra & Panagiotis D. Christofides Department of Chemical Engineering University of California,
HYBRID PREDICTIVE OUTPUT FEEDBACK STABILIZATION OF CONSTRAINED LINEAR SYSTEMS Prashant Mhaskar, Nael H. El-Farra & Panagiotis D. Christofides Department of Chemical Engineering University of California,
This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and
 This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and education use, including for instruction at the authors institution
This article appeared in a journal published by Elsevier. The attached copy is furnished to the author for internal non-commercial research and education use, including for instruction at the authors institution
UNIVERSITY OF CALIFORNIA. Los Angeles. Integrated Fault Detection and Isolation and. Fault-Tolerant Control of Nonlinear Process Systems
 UNIVERSITY OF CALIFORNIA Los Angeles Integrated Fault Detection and Isolation and Fault-Tolerant Control of Nonlinear Process Systems A dissertation submitted in partial satisfaction of the requirements
UNIVERSITY OF CALIFORNIA Los Angeles Integrated Fault Detection and Isolation and Fault-Tolerant Control of Nonlinear Process Systems A dissertation submitted in partial satisfaction of the requirements
UNIVERSITY OF CALIFORNIA. Los Angeles. Smart Manufacturing. A dissertation submitted in partial satisfaction of the
 UNIVERSITY OF CALIFORNIA Los Angeles Economic Model Predictive Control Theory: Computational Efficiency and Application to Smart Manufacturing A dissertation submitted in partial satisfaction of the requirements
UNIVERSITY OF CALIFORNIA Los Angeles Economic Model Predictive Control Theory: Computational Efficiency and Application to Smart Manufacturing A dissertation submitted in partial satisfaction of the requirements
Event-Triggered Decentralized Dynamic Output Feedback Control for LTI Systems
 Event-Triggered Decentralized Dynamic Output Feedback Control for LTI Systems Pavankumar Tallapragada Nikhil Chopra Department of Mechanical Engineering, University of Maryland, College Park, 2742 MD,
Event-Triggered Decentralized Dynamic Output Feedback Control for LTI Systems Pavankumar Tallapragada Nikhil Chopra Department of Mechanical Engineering, University of Maryland, College Park, 2742 MD,
Lyapunov-based model predictive control of nonlinear systems subject to time-varying measurement delays
 INTERNATIONAL JOURNAL OF ADAPTIVE CONTROL AND SIGNAL PROCESSING Int. J. Adapt. Control Signal Process. 2009; 23:788 807 Published online 7 November 2008 in Wiley InterScience (www.interscience.wiley.com)..1085
INTERNATIONAL JOURNAL OF ADAPTIVE CONTROL AND SIGNAL PROCESSING Int. J. Adapt. Control Signal Process. 2009; 23:788 807 Published online 7 November 2008 in Wiley InterScience (www.interscience.wiley.com)..1085
EE C128 / ME C134 Feedback Control Systems
 EE C128 / ME C134 Feedback Control Systems Lecture Additional Material Introduction to Model Predictive Control Maximilian Balandat Department of Electrical Engineering & Computer Science University of
EE C128 / ME C134 Feedback Control Systems Lecture Additional Material Introduction to Model Predictive Control Maximilian Balandat Department of Electrical Engineering & Computer Science University of
A Stable Block Model Predictive Control with Variable Implementation Horizon
 American Control Conference June 8-,. Portland, OR, USA WeB9. A Stable Block Model Predictive Control with Variable Implementation Horizon Jing Sun, Shuhao Chen, Ilya Kolmanovsky Abstract In this paper,
American Control Conference June 8-,. Portland, OR, USA WeB9. A Stable Block Model Predictive Control with Variable Implementation Horizon Jing Sun, Shuhao Chen, Ilya Kolmanovsky Abstract In this paper,
UNIVERSITY OF CALIFORNIA. Los Angeles. in Thin Film Growth. A dissertation submitted in partial satisfaction of the
 UNIVERSITY OF CALIFORNIA Los Angeles Stochastic Modeling and Control of Film Porosity, Surface Roughness and Thickness in Thin Film Growth A dissertation submitted in partial satisfaction of the requirements
UNIVERSITY OF CALIFORNIA Los Angeles Stochastic Modeling and Control of Film Porosity, Surface Roughness and Thickness in Thin Film Growth A dissertation submitted in partial satisfaction of the requirements
Observer-based quantized output feedback control of nonlinear systems
 Proceedings of the 17th World Congress The International Federation of Automatic Control Observer-based quantized output feedback control of nonlinear systems Daniel Liberzon Coordinated Science Laboratory,
Proceedings of the 17th World Congress The International Federation of Automatic Control Observer-based quantized output feedback control of nonlinear systems Daniel Liberzon Coordinated Science Laboratory,
FINITE HORIZON ROBUST MODEL PREDICTIVE CONTROL USING LINEAR MATRIX INEQUALITIES. Danlei Chu, Tongwen Chen, Horacio J. Marquez
 FINITE HORIZON ROBUST MODEL PREDICTIVE CONTROL USING LINEAR MATRIX INEQUALITIES Danlei Chu Tongwen Chen Horacio J Marquez Department of Electrical and Computer Engineering University of Alberta Edmonton
FINITE HORIZON ROBUST MODEL PREDICTIVE CONTROL USING LINEAR MATRIX INEQUALITIES Danlei Chu Tongwen Chen Horacio J Marquez Department of Electrical and Computer Engineering University of Alberta Edmonton
A Globally Stabilizing Receding Horizon Controller for Neutrally Stable Linear Systems with Input Constraints 1
 A Globally Stabilizing Receding Horizon Controller for Neutrally Stable Linear Systems with Input Constraints 1 Ali Jadbabaie, Claudio De Persis, and Tae-Woong Yoon 2 Department of Electrical Engineering
A Globally Stabilizing Receding Horizon Controller for Neutrally Stable Linear Systems with Input Constraints 1 Ali Jadbabaie, Claudio De Persis, and Tae-Woong Yoon 2 Department of Electrical Engineering
Copyrighted Material. 1.1 Large-Scale Interconnected Dynamical Systems
 Chapter One Introduction 1.1 Large-Scale Interconnected Dynamical Systems Modern complex dynamical systems 1 are highly interconnected and mutually interdependent, both physically and through a multitude
Chapter One Introduction 1.1 Large-Scale Interconnected Dynamical Systems Modern complex dynamical systems 1 are highly interconnected and mutually interdependent, both physically and through a multitude
Controlling Large-Scale Systems with Distributed Model Predictive Control
 Controlling Large-Scale Systems with Distributed Model Predictive Control James B. Rawlings Department of Chemical and Biological Engineering November 8, 2010 Annual AIChE Meeting Salt Lake City, UT Rawlings
Controlling Large-Scale Systems with Distributed Model Predictive Control James B. Rawlings Department of Chemical and Biological Engineering November 8, 2010 Annual AIChE Meeting Salt Lake City, UT Rawlings
Distributed Receding Horizon Control of Cost Coupled Systems
 Distributed Receding Horizon Control of Cost Coupled Systems William B. Dunbar Abstract This paper considers the problem of distributed control of dynamically decoupled systems that are subject to decoupled
Distributed Receding Horizon Control of Cost Coupled Systems William B. Dunbar Abstract This paper considers the problem of distributed control of dynamically decoupled systems that are subject to decoupled
IMPROVED MPC DESIGN BASED ON SATURATING CONTROL LAWS
 IMPROVED MPC DESIGN BASED ON SATURATING CONTROL LAWS D. Limon, J.M. Gomes da Silva Jr., T. Alamo and E.F. Camacho Dpto. de Ingenieria de Sistemas y Automática. Universidad de Sevilla Camino de los Descubrimientos
IMPROVED MPC DESIGN BASED ON SATURATING CONTROL LAWS D. Limon, J.M. Gomes da Silva Jr., T. Alamo and E.F. Camacho Dpto. de Ingenieria de Sistemas y Automática. Universidad de Sevilla Camino de los Descubrimientos
arxiv: v1 [cs.sy] 2 Oct 2018
![arxiv: v1 [cs.sy] 2 Oct 2018](/thumbs/87/96489289.jpg "arxiv: v1 [cs.sy] 2 Oct 2018") Non-linear Model Predictive Control of Conically Shaped Liquid Storage Tanks arxiv:1810.01119v1 [cs.sy] 2 Oct 2018 5 10 Abstract Martin Klaučo, L uboš Čirka Slovak University of Technology in Bratislava,
Non-linear Model Predictive Control of Conically Shaped Liquid Storage Tanks arxiv:1810.01119v1 [cs.sy] 2 Oct 2018 5 10 Abstract Martin Klaučo, L uboš Čirka Slovak University of Technology in Bratislava,
Theory in Model Predictive Control :" Constraint Satisfaction and Stability!
 Theory in Model Predictive Control :" Constraint Satisfaction and Stability Colin Jones, Melanie Zeilinger Automatic Control Laboratory, EPFL Example: Cessna Citation Aircraft Linearized continuous-time
Theory in Model Predictive Control :" Constraint Satisfaction and Stability Colin Jones, Melanie Zeilinger Automatic Control Laboratory, EPFL Example: Cessna Citation Aircraft Linearized continuous-time
A Novel Integral-Based Event Triggering Control for Linear Time-Invariant Systems
 53rd IEEE Conference on Decision and Control December 15-17, 2014. Los Angeles, California, USA A Novel Integral-Based Event Triggering Control for Linear Time-Invariant Systems Seyed Hossein Mousavi 1,
53rd IEEE Conference on Decision and Control December 15-17, 2014. Los Angeles, California, USA A Novel Integral-Based Event Triggering Control for Linear Time-Invariant Systems Seyed Hossein Mousavi 1,
1670 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 50, NO. 11, NOVEMBER 2005
 1670 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 50, NO. 11, NOVEMBER 2005 Predictive Control of Switched Nonlinear Systems With Scheduled Mode Transitions Prashant Mhaskar, Nael H. El-Farra, and Panagiotis
1670 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 50, NO. 11, NOVEMBER 2005 Predictive Control of Switched Nonlinear Systems With Scheduled Mode Transitions Prashant Mhaskar, Nael H. El-Farra, and Panagiotis
EML5311 Lyapunov Stability & Robust Control Design
 EML5311 Lyapunov Stability & Robust Control Design 1 Lyapunov Stability criterion In Robust control design of nonlinear uncertain systems, stability theory plays an important role in engineering systems.
EML5311 Lyapunov Stability & Robust Control Design 1 Lyapunov Stability criterion In Robust control design of nonlinear uncertain systems, stability theory plays an important role in engineering systems.
Real-Time Feasibility of Nonlinear Predictive Control for Semi-batch Reactors
 European Symposium on Computer Arded Aided Process Engineering 15 L. Puigjaner and A. Espuña (Editors) 2005 Elsevier Science B.V. All rights reserved. Real-Time Feasibility of Nonlinear Predictive Control
European Symposium on Computer Arded Aided Process Engineering 15 L. Puigjaner and A. Espuña (Editors) 2005 Elsevier Science B.V. All rights reserved. Real-Time Feasibility of Nonlinear Predictive Control
Learning Model Predictive Control for Iterative Tasks: A Computationally Efficient Approach for Linear System
 Learning Model Predictive Control for Iterative Tasks: A Computationally Efficient Approach for Linear System Ugo Rosolia Francesco Borrelli University of California at Berkeley, Berkeley, CA 94701, USA
Learning Model Predictive Control for Iterative Tasks: A Computationally Efficient Approach for Linear System Ugo Rosolia Francesco Borrelli University of California at Berkeley, Berkeley, CA 94701, USA
Economic Model Predictive Control: Handling Valve Actuator Dynamics and Process Equipment Considerations
 Foundations and Trends R in Systems and Control Economic Model Predictive Control: Handling Valve Actuator Dynamics and Process Equipment Considerations Suggested Citation: Helen Durand and Panagiotis
Foundations and Trends R in Systems and Control Economic Model Predictive Control: Handling Valve Actuator Dynamics and Process Equipment Considerations Suggested Citation: Helen Durand and Panagiotis
Economic Model Predictive Control Historical Perspective and Recent Developments and Industrial Examples
 1 Economic Model Predictive Control Historical Perspective and Recent Developments and Industrial Examples Public Trial Lecture Candidate: Vinicius de Oliveira Department of Chemical Engineering, Faculty
1 Economic Model Predictive Control Historical Perspective and Recent Developments and Industrial Examples Public Trial Lecture Candidate: Vinicius de Oliveira Department of Chemical Engineering, Faculty
Lecture Note 7: Switching Stabilization via Control-Lyapunov Function
 ECE7850: Hybrid Systems:Theory and Applications Lecture Note 7: Switching Stabilization via Control-Lyapunov Function Wei Zhang Assistant Professor Department of Electrical and Computer Engineering Ohio
ECE7850: Hybrid Systems:Theory and Applications Lecture Note 7: Switching Stabilization via Control-Lyapunov Function Wei Zhang Assistant Professor Department of Electrical and Computer Engineering Ohio
UNIVERSITY OF CALIFORNIA. Los Angeles. Economic Model Predictive Control and Nonlinear Control Actuator Dynamics
 UNIVERSITY OF CALIFORNIA Los Angeles Economic Model Predictive Control and Nonlinear Control Actuator Dynamics A dissertation submitted in partial satisfaction of the requirements for the degree Doctor
UNIVERSITY OF CALIFORNIA Los Angeles Economic Model Predictive Control and Nonlinear Control Actuator Dynamics A dissertation submitted in partial satisfaction of the requirements for the degree Doctor
ROBUST STABLE NONLINEAR CONTROL AND DESIGN OF A CSTR IN A LARGE OPERATING RANGE. Johannes Gerhard, Martin Mönnigmann, Wolfgang Marquardt
 ROBUST STABLE NONLINEAR CONTROL AND DESIGN OF A CSTR IN A LARGE OPERATING RANGE Johannes Gerhard, Martin Mönnigmann, Wolfgang Marquardt Lehrstuhl für Prozesstechnik, RWTH Aachen Turmstr. 46, D-5264 Aachen,
ROBUST STABLE NONLINEAR CONTROL AND DESIGN OF A CSTR IN A LARGE OPERATING RANGE Johannes Gerhard, Martin Mönnigmann, Wolfgang Marquardt Lehrstuhl für Prozesstechnik, RWTH Aachen Turmstr. 46, D-5264 Aachen,
On robustness of suboptimal min-max model predictive control *
 Manuscript received June 5, 007; revised Sep., 007 On robustness of suboptimal min-max model predictive control * DE-FENG HE, HAI-BO JI, TAO ZHENG Department of Automation University of Science and Technology
Manuscript received June 5, 007; revised Sep., 007 On robustness of suboptimal min-max model predictive control * DE-FENG HE, HAI-BO JI, TAO ZHENG Department of Automation University of Science and Technology
ADAPTIVE control of uncertain time-varying plants is a
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 56, NO. 1, JANUARY 2011 27 Supervisory Control of Uncertain Linear Time-Varying Systems Linh Vu, Member, IEEE, Daniel Liberzon, Senior Member, IEEE Abstract
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 56, NO. 1, JANUARY 2011 27 Supervisory Control of Uncertain Linear Time-Varying Systems Linh Vu, Member, IEEE, Daniel Liberzon, Senior Member, IEEE Abstract
Robust control for a multi-stage evaporation plant in the presence of uncertainties
 Preprint 11th IFAC Symposium on Dynamics and Control of Process Systems including Biosystems June 6-8 16. NTNU Trondheim Norway Robust control for a multi-stage evaporation plant in the presence of uncertainties
Preprint 11th IFAC Symposium on Dynamics and Control of Process Systems including Biosystems June 6-8 16. NTNU Trondheim Norway Robust control for a multi-stage evaporation plant in the presence of uncertainties
Adaptive Nonlinear Model Predictive Control with Suboptimality and Stability Guarantees
 Adaptive Nonlinear Model Predictive Control with Suboptimality and Stability Guarantees Pontus Giselsson Department of Automatic Control LTH Lund University Box 118, SE-221 00 Lund, Sweden pontusg@control.lth.se
Adaptive Nonlinear Model Predictive Control with Suboptimality and Stability Guarantees Pontus Giselsson Department of Automatic Control LTH Lund University Box 118, SE-221 00 Lund, Sweden pontusg@control.lth.se
Process Unit Control System Design
 Process Unit Control System Design 1. Introduction 2. Influence of process design 3. Control degrees of freedom 4. Selection of control system variables 5. Process safety Introduction Control system requirements»
Process Unit Control System Design 1. Introduction 2. Influence of process design 3. Control degrees of freedom 4. Selection of control system variables 5. Process safety Introduction Control system requirements»
ANALYSIS OF BIOLOGICAL NETWORKS USING HYBRID SYSTEMS THEORY. Nael H. El-Farra, Adiwinata Gani & Panagiotis D. Christofides
 ANALYSIS OF BIOLOGICAL NETWORKS USING HYBRID SYSTEMS THEORY Nael H El-Farra, Adiwinata Gani & Panagiotis D Christofides Department of Chemical Engineering University of California, Los Angeles 2003 AIChE
ANALYSIS OF BIOLOGICAL NETWORKS USING HYBRID SYSTEMS THEORY Nael H El-Farra, Adiwinata Gani & Panagiotis D Christofides Department of Chemical Engineering University of California, Los Angeles 2003 AIChE
Fault-Tolerant Control of Nonlinear Process Systems Subject to Sensor Faults
 ID: 3b2server Date: 13/2/07 Time: 08:03 Path: J:/Wiley_Sgml/JOHNWILEY/3B2-Final-Pdfs/Electronic/WEB_PDF/Process/C2AIC#070012 Fault-Tolerant Control of Nonlinear Process Systems Subject to Sensor Faults
ID: 3b2server Date: 13/2/07 Time: 08:03 Path: J:/Wiley_Sgml/JOHNWILEY/3B2-Final-Pdfs/Electronic/WEB_PDF/Process/C2AIC#070012 Fault-Tolerant Control of Nonlinear Process Systems Subject to Sensor Faults
Chapter One. Introduction
 Chapter One Introduction A system is a combination of components or parts that is perceived as a single entity. The parts making up the system may be clearly or vaguely defined. These parts are related
Chapter One Introduction A system is a combination of components or parts that is perceived as a single entity. The parts making up the system may be clearly or vaguely defined. These parts are related
Economic and Distributed Model Predictive Control: Recent Developments in Optimization-Based Control
 SICE Journal of Control, Measurement, and System Integration, Vol. 10, No. 2, pp. 039 052, March 2017 Economic and Distributed Model Predictive Control: Recent Developments in Optimization-Based Control
SICE Journal of Control, Measurement, and System Integration, Vol. 10, No. 2, pp. 039 052, March 2017 Economic and Distributed Model Predictive Control: Recent Developments in Optimization-Based Control
Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
IEEE TRANSACTIONS ON AUTOMATIC CONTROL VOL. 56 NO. 3 MARCH 2011 655 Lyapunov Stability of Linear Predictor Feedback for Distributed Input Delays Nikolaos Bekiaris-Liberis Miroslav Krstic In this case system
Chapter One. Introduction
 Chapter One Introduction With the ever-increasing influence of mathematical modeling and engineering on biological, social, and medical sciences, it is not surprising that dynamical system theory has played
Chapter One Introduction With the ever-increasing influence of mathematical modeling and engineering on biological, social, and medical sciences, it is not surprising that dynamical system theory has played
Economic Model Predictive Control with Time-Varying Objective Function for Nonlinear Process Systems
 Economic Model Predictive Control with Time-Varying Objective Function for Nonlinear Process Systems Matthew Ellis Dept. of Chemical and Biomolecular Engineering, University of California, Los Angeles,
Economic Model Predictive Control with Time-Varying Objective Function for Nonlinear Process Systems Matthew Ellis Dept. of Chemical and Biomolecular Engineering, University of California, Los Angeles,
CBE495 LECTURE IV MODEL PREDICTIVE CONTROL
 What is Model Predictive Control (MPC)? CBE495 LECTURE IV MODEL PREDICTIVE CONTROL Professor Dae Ryook Yang Fall 2013 Dept. of Chemical and Biological Engineering Korea University * Some parts are from
What is Model Predictive Control (MPC)? CBE495 LECTURE IV MODEL PREDICTIVE CONTROL Professor Dae Ryook Yang Fall 2013 Dept. of Chemical and Biological Engineering Korea University * Some parts are from
Tube Model Predictive Control Using Homothety & Invariance
 Tube Model Predictive Control Using Homothety & Invariance Saša V. Raković rakovic@control.ee.ethz.ch http://control.ee.ethz.ch/~srakovic Collaboration in parts with Mr. Mirko Fiacchini Automatic Control
Tube Model Predictive Control Using Homothety & Invariance Saša V. Raković rakovic@control.ee.ethz.ch http://control.ee.ethz.ch/~srakovic Collaboration in parts with Mr. Mirko Fiacchini Automatic Control
Nonlinear Model Predictive Control Tools (NMPC Tools)
") Nonlinear Model Predictive Control Tools (NMPC Tools) Rishi Amrit, James B. Rawlings April 5, 2008 1 Formulation We consider a control system composed of three parts([2]). Estimator Target calculator Regulator
Nonlinear Model Predictive Control Tools (NMPC Tools) Rishi Amrit, James B. Rawlings April 5, 2008 1 Formulation We consider a control system composed of three parts([2]). Estimator Target calculator Regulator
DESIGN OF OBSERVERS FOR SYSTEMS WITH SLOW AND FAST MODES
 DESIGN OF OBSERVERS FOR SYSTEMS WITH SLOW AND FAST MODES by HEONJONG YOO A thesis submitted to the Graduate School-New Brunswick Rutgers, The State University of New Jersey In partial fulfillment of the
DESIGN OF OBSERVERS FOR SYSTEMS WITH SLOW AND FAST MODES by HEONJONG YOO A thesis submitted to the Graduate School-New Brunswick Rutgers, The State University of New Jersey In partial fulfillment of the
A Robust Event-Triggered Consensus Strategy for Linear Multi-Agent Systems with Uncertain Network Topology
 A Robust Event-Triggered Consensus Strategy for Linear Multi-Agent Systems with Uncertain Network Topology Amir Amini, Amir Asif, Arash Mohammadi Electrical and Computer Engineering,, Montreal, Canada.
A Robust Event-Triggered Consensus Strategy for Linear Multi-Agent Systems with Uncertain Network Topology Amir Amini, Amir Asif, Arash Mohammadi Electrical and Computer Engineering,, Montreal, Canada.
A State-Space Approach to Control of Interconnected Systems
 A State-Space Approach to Control of Interconnected Systems Part II: General Interconnections Cédric Langbort Center for the Mathematics of Information CALIFORNIA INSTITUTE OF TECHNOLOGY clangbort@ist.caltech.edu
A State-Space Approach to Control of Interconnected Systems Part II: General Interconnections Cédric Langbort Center for the Mathematics of Information CALIFORNIA INSTITUTE OF TECHNOLOGY clangbort@ist.caltech.edu
Model Predictive Controller of Boost Converter with RLE Load
 Model Predictive Controller of Boost Converter with RLE Load N. Murali K.V.Shriram S.Muthukumar Nizwa College of Vellore Institute of Nizwa College of Technology Technology University Technology Ministry
Model Predictive Controller of Boost Converter with RLE Load N. Murali K.V.Shriram S.Muthukumar Nizwa College of Vellore Institute of Nizwa College of Technology Technology University Technology Ministry
QUANTIZED SYSTEMS AND CONTROL. Daniel Liberzon. DISC HS, June Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign
 QUANTIZED SYSTEMS AND CONTROL Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign DISC HS, June 2003 HYBRID CONTROL Plant: u y
QUANTIZED SYSTEMS AND CONTROL Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign DISC HS, June 2003 HYBRID CONTROL Plant: u y
Introduction to. Process Control. Ahmet Palazoglu. Second Edition. Jose A. Romagnoli. CRC Press. Taylor & Francis Group. Taylor & Francis Group,
 Introduction to Process Control Second Edition Jose A. Romagnoli Ahmet Palazoglu CRC Press Taylor & Francis Group Boca Raton London NewYork CRC Press is an imprint of the Taylor & Francis Group, an informa
Introduction to Process Control Second Edition Jose A. Romagnoli Ahmet Palazoglu CRC Press Taylor & Francis Group Boca Raton London NewYork CRC Press is an imprint of the Taylor & Francis Group, an informa
Yiming Lou and Panagiotis D. Christofides. Department of Chemical Engineering University of California, Los Angeles
 OPTIMAL ACTUATOR/SENSOR PLACEMENT FOR NONLINEAR CONTROL OF THE KURAMOTO-SIVASHINSKY EQUATION Yiming Lou and Panagiotis D. Christofides Department of Chemical Engineering University of California, Los Angeles
OPTIMAL ACTUATOR/SENSOR PLACEMENT FOR NONLINEAR CONTROL OF THE KURAMOTO-SIVASHINSKY EQUATION Yiming Lou and Panagiotis D. Christofides Department of Chemical Engineering University of California, Los Angeles
Preface. for a driver to react in response to large disturbances in road traffic; for a signal sent from Houston to reach a satellite in orbit;
 page ix Consider the time periods required for a driver to react in response to large disturbances in road traffic; for a signal sent from Houston to reach a satellite in orbit; for a coolant to be distributed
page ix Consider the time periods required for a driver to react in response to large disturbances in road traffic; for a signal sent from Houston to reach a satellite in orbit; for a coolant to be distributed
Resource-aware Quasi-decentralized Control of Nonlinear Plants Over Communication Networks
 29 American Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June -2, 29 WeA5.5 Resource-aware Quasi-decentralized Control of Nonlinear Plants Over Communication Networks Yulei Sun and Nael
29 American Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June -2, 29 WeA5.5 Resource-aware Quasi-decentralized Control of Nonlinear Plants Over Communication Networks Yulei Sun and Nael
Distributed and Real-time Predictive Control
 Distributed and Real-time Predictive Control Melanie Zeilinger Christian Conte (ETH) Alexander Domahidi (ETH) Ye Pu (EPFL) Colin Jones (EPFL) Challenges in modern control systems Power system: - Frequency
Distributed and Real-time Predictive Control Melanie Zeilinger Christian Conte (ETH) Alexander Domahidi (ETH) Ye Pu (EPFL) Colin Jones (EPFL) Challenges in modern control systems Power system: - Frequency
Design of Nonlinear Control Systems with the Highest Derivative in Feedback
 SERIES ON STAB1UTY, VIBRATION AND CONTROL OF SYSTEMS SeriesA Volume 16 Founder & Editor: Ardeshir Guran Co-Editors: M. Cloud & W. B. Zimmerman Design of Nonlinear Control Systems with the Highest Derivative
SERIES ON STAB1UTY, VIBRATION AND CONTROL OF SYSTEMS SeriesA Volume 16 Founder & Editor: Ardeshir Guran Co-Editors: M. Cloud & W. B. Zimmerman Design of Nonlinear Control Systems with the Highest Derivative
Stable Hierarchical Model Predictive Control Using an Inner Loop Reference Model
 Stable Hierarchical Model Predictive Control Using an Inner Loop Reference Model Chris Vermillion Amor Menezes Ilya Kolmanovsky Altaeros Energies, Cambridge, MA 02140 (e-mail: chris.vermillion@altaerosenergies.com)
Stable Hierarchical Model Predictive Control Using an Inner Loop Reference Model Chris Vermillion Amor Menezes Ilya Kolmanovsky Altaeros Energies, Cambridge, MA 02140 (e-mail: chris.vermillion@altaerosenergies.com)
ABSTRACT. Pavankumar Tallapragada, Doctor of Philosophy, 2013
 ABSTRACT Title of dissertation: UTILITY DRIVEN SAMPLED DATA CONTROL UNDER IMPERFECT INFORMATION Pavankumar Tallapragada, Doctor of Philosophy, 2013 Dissertation directed by: Dr. Nikhil Chopra Department
ABSTRACT Title of dissertation: UTILITY DRIVEN SAMPLED DATA CONTROL UNDER IMPERFECT INFORMATION Pavankumar Tallapragada, Doctor of Philosophy, 2013 Dissertation directed by: Dr. Nikhil Chopra Department
UCLA Chemical Engineering. Process & Control Systems Engineering Laboratory
 Constrained Innite-time Optimal Control Donald J. Chmielewski Chemical Engineering Department University of California Los Angeles February 23, 2000 Stochastic Formulation - Min Max Formulation - UCLA
Constrained Innite-time Optimal Control Donald J. Chmielewski Chemical Engineering Department University of California Los Angeles February 23, 2000 Stochastic Formulation - Min Max Formulation - UCLA
OPTIMAL CONTROL AND ESTIMATION
 OPTIMAL CONTROL AND ESTIMATION Robert F. Stengel Department of Mechanical and Aerospace Engineering Princeton University, Princeton, New Jersey DOVER PUBLICATIONS, INC. New York CONTENTS 1. INTRODUCTION
OPTIMAL CONTROL AND ESTIMATION Robert F. Stengel Department of Mechanical and Aerospace Engineering Princeton University, Princeton, New Jersey DOVER PUBLICATIONS, INC. New York CONTENTS 1. INTRODUCTION
Optimal Control of Weakly Coupled Systems and Applications
 Optimal Control of Weakly Coupled Systems and Applications HIGH ACCURACY TECHNIQUES Z. Gajić, M-T. Lim, D. Skatarić W-C. Su, and V. Kecman Taylor & Francis (CRC Press, Dekker) 2008 Preface This book is
Optimal Control of Weakly Coupled Systems and Applications HIGH ACCURACY TECHNIQUES Z. Gajić, M-T. Lim, D. Skatarić W-C. Su, and V. Kecman Taylor & Francis (CRC Press, Dekker) 2008 Preface This book is
COMPUTATIONAL DELAY IN NONLINEAR MODEL PREDICTIVE CONTROL. Rolf Findeisen Frank Allgöwer
 COMPUTATIONAL DELAY IN NONLINEAR MODEL PREDICTIVE CONTROL Rolf Findeisen Frank Allgöwer Institute for Systems Theory in Engineering, University of Stuttgart, 70550 Stuttgart, Germany, findeise,allgower
COMPUTATIONAL DELAY IN NONLINEAR MODEL PREDICTIVE CONTROL Rolf Findeisen Frank Allgöwer Institute for Systems Theory in Engineering, University of Stuttgart, 70550 Stuttgart, Germany, findeise,allgower
An LMI Approach to Robust Controller Designs of Takagi-Sugeno fuzzy Systems with Parametric Uncertainties
 An LMI Approach to Robust Controller Designs of akagi-sugeno fuzzy Systems with Parametric Uncertainties Li Qi and Jun-You Yang School of Electrical Engineering Shenyang University of echnolog Shenyang,
An LMI Approach to Robust Controller Designs of akagi-sugeno fuzzy Systems with Parametric Uncertainties Li Qi and Jun-You Yang School of Electrical Engineering Shenyang University of echnolog Shenyang,
Analysis and Synthesis of Single-Input Single-Output Control Systems
 Lino Guzzella Analysis and Synthesis of Single-Input Single-Output Control Systems l+kja» \Uja>)W2(ja»\ um Contents 1 Definitions and Problem Formulations 1 1.1 Introduction 1 1.2 Definitions 1 1.2.1 Systems
Lino Guzzella Analysis and Synthesis of Single-Input Single-Output Control Systems l+kja» \Uja>)W2(ja»\ um Contents 1 Definitions and Problem Formulations 1 1.1 Introduction 1 1.2 Definitions 1 1.2.1 Systems
PREDICTIVE CONTROL OF NONLINEAR SYSTEMS. Received February 2008; accepted May 2008
 ICIC Express Letters ICIC International c 2008 ISSN 1881-803X Volume 2, Number 3, September 2008 pp. 239 244 PREDICTIVE CONTROL OF NONLINEAR SYSTEMS Martin Janík, Eva Miklovičová and Marián Mrosko Faculty
ICIC Express Letters ICIC International c 2008 ISSN 1881-803X Volume 2, Number 3, September 2008 pp. 239 244 PREDICTIVE CONTROL OF NONLINEAR SYSTEMS Martin Janík, Eva Miklovičová and Marián Mrosko Faculty
Optimizing Economic Performance using Model Predictive Control
 Optimizing Economic Performance using Model Predictive Control James B. Rawlings Department of Chemical and Biological Engineering Second Workshop on Computational Issues in Nonlinear Control Monterey,
Optimizing Economic Performance using Model Predictive Control James B. Rawlings Department of Chemical and Biological Engineering Second Workshop on Computational Issues in Nonlinear Control Monterey,
Postface to Model Predictive Control: Theory and Design
 Postface to Model Predictive Control: Theory and Design J. B. Rawlings and D. Q. Mayne August 19, 2012 The goal of this postface is to point out and comment upon recent MPC papers and issues pertaining
Postface to Model Predictive Control: Theory and Design J. B. Rawlings and D. Q. Mayne August 19, 2012 The goal of this postface is to point out and comment upon recent MPC papers and issues pertaining
Robust Adaptive MPC for Systems with Exogeneous Disturbances
 Robust Adaptive MPC for Systems with Exogeneous Disturbances V. Adetola M. Guay Department of Chemical Engineering, Queen s University, Kingston, Ontario, Canada (e-mail: martin.guay@chee.queensu.ca) Abstract:
Robust Adaptive MPC for Systems with Exogeneous Disturbances V. Adetola M. Guay Department of Chemical Engineering, Queen s University, Kingston, Ontario, Canada (e-mail: martin.guay@chee.queensu.ca) Abstract:
Event-Triggered Broadcasting across Distributed Networked Control Systems
 Event-Triggered Broadcasting across Distributed Networked Control Systems Xiaofeng Wang and Michael D. Lemmon Abstract This paper examines event-triggered broadcasting of state information in distributed
Event-Triggered Broadcasting across Distributed Networked Control Systems Xiaofeng Wang and Michael D. Lemmon Abstract This paper examines event-triggered broadcasting of state information in distributed
Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process
 Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process D.Angeline Vijula #, Dr.N.Devarajan * # Electronics and Instrumentation Engineering Sri Ramakrishna
Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process D.Angeline Vijula #, Dr.N.Devarajan * # Electronics and Instrumentation Engineering Sri Ramakrishna
Dynamic Operability for the Calculation of Transient Output Constraints for Non-Square Linear Model Predictive Controllers
 Dynamic Operability for the Calculation of Transient Output Constraints for Non-Square Linear Model Predictive Controllers Fernando V. Lima and Christos Georgakis* Department of Chemical and Biological
Dynamic Operability for the Calculation of Transient Output Constraints for Non-Square Linear Model Predictive Controllers Fernando V. Lima and Christos Georgakis* Department of Chemical and Biological
Coordinating multiple optimization-based controllers: new opportunities and challenges
 Coordinating multiple optimization-based controllers: new opportunities and challenges James B. Rawlings and Brett T. Stewart Department of Chemical and Biological Engineering University of Wisconsin Madison
Coordinating multiple optimization-based controllers: new opportunities and challenges James B. Rawlings and Brett T. Stewart Department of Chemical and Biological Engineering University of Wisconsin Madison
Real-Time Software Transactional Memory: Contention Managers, Time Bounds, and Implementations
 Real-Time Software Transactional Memory: Contention Managers, Time Bounds, and Implementations Mohammed El-Shambakey Dissertation Submitted to the Faculty of the Virginia Polytechnic Institute and State
Real-Time Software Transactional Memory: Contention Managers, Time Bounds, and Implementations Mohammed El-Shambakey Dissertation Submitted to the Faculty of the Virginia Polytechnic Institute and State
Control Systems. LMIs in. Guang-Ren Duan. Analysis, Design and Applications. Hai-Hua Yu. CRC Press. Taylor & Francis Croup
 LMIs in Control Systems Analysis, Design and Applications Guang-Ren Duan Hai-Hua Yu CRC Press Taylor & Francis Croup Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Croup, an
LMIs in Control Systems Analysis, Design and Applications Guang-Ren Duan Hai-Hua Yu CRC Press Taylor & Francis Croup Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Croup, an
Distributed Adaptive Consensus Protocol with Decaying Gains on Directed Graphs
 Distributed Adaptive Consensus Protocol with Decaying Gains on Directed Graphs Štefan Knotek, Kristian Hengster-Movric and Michael Šebek Department of Control Engineering, Czech Technical University, Prague,
Distributed Adaptive Consensus Protocol with Decaying Gains on Directed Graphs Štefan Knotek, Kristian Hengster-Movric and Michael Šebek Department of Control Engineering, Czech Technical University, Prague,
Cooperation-based optimization of industrial supply chains
 Cooperation-based optimization of industrial supply chains James B. Rawlings, Brett T. Stewart, Kaushik Subramanian and Christos T. Maravelias Department of Chemical and Biological Engineering May 9 2,
Cooperation-based optimization of industrial supply chains James B. Rawlings, Brett T. Stewart, Kaushik Subramanian and Christos T. Maravelias Department of Chemical and Biological Engineering May 9 2,
THE DESIGN of stabilizing feedback control laws for
 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 42, NO. 4, APRIL 1997 473 Robust Feedback Stabilization of Chemical Reactors F. Viel, F. Jadot, and G. Bastin Abstract This paper deals the temperature stabilization
IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 42, NO. 4, APRIL 1997 473 Robust Feedback Stabilization of Chemical Reactors F. Viel, F. Jadot, and G. Bastin Abstract This paper deals the temperature stabilization
Sliding Modes in Control and Optimization
 Vadim I. Utkin Sliding Modes in Control and Optimization With 24 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Hong Kong Barcelona Budapest Contents Parti. Mathematical Tools 1
Vadim I. Utkin Sliding Modes in Control and Optimization With 24 Figures Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Hong Kong Barcelona Budapest Contents Parti. Mathematical Tools 1
Constrained Optimization and Distributed Computation Based Car-Following Control of A Connected and Autonomous Vehicle Platoon
 Constrained Optimization and Distributed Computation Based Car-Following Control of A Connected and Autonomous Vehicle Platoon Siyuan Gong a, Jinglai Shen b, Lili Du a ldu3@iit.edu a: Illinois Institute
Constrained Optimization and Distributed Computation Based Car-Following Control of A Connected and Autonomous Vehicle Platoon Siyuan Gong a, Jinglai Shen b, Lili Du a ldu3@iit.edu a: Illinois Institute
Decentralized and distributed control
 Decentralized and distributed control Centralized control for constrained discrete-time systems M. Farina 1 G. Ferrari Trecate 2 1 Dipartimento di Elettronica, Informazione e Bioingegneria (DEIB) Politecnico
Decentralized and distributed control Centralized control for constrained discrete-time systems M. Farina 1 G. Ferrari Trecate 2 1 Dipartimento di Elettronica, Informazione e Bioingegneria (DEIB) Politecnico
On the Inherent Robustness of Suboptimal Model Predictive Control
 On the Inherent Robustness of Suboptimal Model Predictive Control James B. Rawlings, Gabriele Pannocchia, Stephen J. Wright, and Cuyler N. Bates Department of Chemical & Biological Engineering Computer
On the Inherent Robustness of Suboptimal Model Predictive Control James B. Rawlings, Gabriele Pannocchia, Stephen J. Wright, and Cuyler N. Bates Department of Chemical & Biological Engineering Computer
On the Inherent Robustness of Suboptimal Model Predictive Control
 On the Inherent Robustness of Suboptimal Model Predictive Control James B. Rawlings, Gabriele Pannocchia, Stephen J. Wright, and Cuyler N. Bates Department of Chemical and Biological Engineering and Computer
On the Inherent Robustness of Suboptimal Model Predictive Control James B. Rawlings, Gabriele Pannocchia, Stephen J. Wright, and Cuyler N. Bates Department of Chemical and Biological Engineering and Computer
Nonlinear Control Design for Linear Differential Inclusions via Convex Hull Quadratic Lyapunov Functions
 Nonlinear Control Design for Linear Differential Inclusions via Convex Hull Quadratic Lyapunov Functions Tingshu Hu Abstract This paper presents a nonlinear control design method for robust stabilization
Nonlinear Control Design for Linear Differential Inclusions via Convex Hull Quadratic Lyapunov Functions Tingshu Hu Abstract This paper presents a nonlinear control design method for robust stabilization
WIDE AREA CONTROL THROUGH AGGREGATION OF POWER SYSTEMS
 WIDE AREA CONTROL THROUGH AGGREGATION OF POWER SYSTEMS Arash Vahidnia B.Sc, M.Sc in Electrical Engineering A Thesis submitted in partial fulfilment of the requirements for the degree of Doctor of Philosophy
WIDE AREA CONTROL THROUGH AGGREGATION OF POWER SYSTEMS Arash Vahidnia B.Sc, M.Sc in Electrical Engineering A Thesis submitted in partial fulfilment of the requirements for the degree of Doctor of Philosophy
Dominic Groß. Distributed Model Predictive Control with Event-Based Communication
 Dominic Groß Distributed Model Predictive Control with Event-Based Communication Dominic Groß Distributed Model Predictive Control with Event-Based Communication kassel university press This work has been
Dominic Groß Distributed Model Predictive Control with Event-Based Communication Dominic Groß Distributed Model Predictive Control with Event-Based Communication kassel university press This work has been
ADAPTIVE FORCE AND MOTION CONTROL OF ROBOT MANIPULATORS IN CONSTRAINED MOTION WITH DISTURBANCES
 ADAPTIVE FORCE AND MOTION CONTROL OF ROBOT MANIPULATORS IN CONSTRAINED MOTION WITH DISTURBANCES By YUNG-SHENG CHANG A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
ADAPTIVE FORCE AND MOTION CONTROL OF ROBOT MANIPULATORS IN CONSTRAINED MOTION WITH DISTURBANCES By YUNG-SHENG CHANG A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT
Model Predictive Control Design for Nonlinear Process Control Reactor Case Study: CSTR (Continuous Stirred Tank Reactor)
") IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 7, Issue 1 (Jul. - Aug. 2013), PP 88-94 Model Predictive Control Design for Nonlinear Process
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-issn: 2278-1676,p-ISSN: 2320-3331, Volume 7, Issue 1 (Jul. - Aug. 2013), PP 88-94 Model Predictive Control Design for Nonlinear Process
Research Article Convex Polyhedron Method to Stability of Continuous Systems with Two Additive Time-Varying Delay Components
 Applied Mathematics Volume 202, Article ID 689820, 3 pages doi:0.55/202/689820 Research Article Convex Polyhedron Method to Stability of Continuous Systems with Two Additive Time-Varying Delay Components
Applied Mathematics Volume 202, Article ID 689820, 3 pages doi:0.55/202/689820 Research Article Convex Polyhedron Method to Stability of Continuous Systems with Two Additive Time-Varying Delay Components
An Adaptive Predictor Corrector Strategy for Output Feedback Control of Nonlinear Hybrid Process Systems
 2011 American Control Conference on O'Farrell Street, San Francisco, CA, USA June 29 - July 01, 2011 An Adaptive Predictor Corrector Strategy for Output Feedback Control of Nonlinear Hybrid Process Systems
2011 American Control Conference on O'Farrell Street, San Francisco, CA, USA June 29 - July 01, 2011 An Adaptive Predictor Corrector Strategy for Output Feedback Control of Nonlinear Hybrid Process Systems
Lecture 1. Stochastic Optimization: Introduction. January 8, 2018
 Lecture 1 Stochastic Optimization: Introduction January 8, 2018 Optimization Concerned with mininmization/maximization of mathematical functions Often subject to constraints Euler (1707-1783): Nothing
Lecture 1 Stochastic Optimization: Introduction January 8, 2018 Optimization Concerned with mininmization/maximization of mathematical functions Often subject to constraints Euler (1707-1783): Nothing
Application of Decomposition Methodology to Solve Integrated Process Design and Controller Design Problems for Reactor-Separator-Recycle Systems
 Proceedings of the 9th International Symposium on Dynamics and Control of Process Systems (DYCOPS 2010), Leuven, Belgium, July 5-7, 2010 Mayuresh Kothare, Moses Tade, Alain Vande Wouwer, Ilse Smets (Eds.)
Proceedings of the 9th International Symposium on Dynamics and Control of Process Systems (DYCOPS 2010), Leuven, Belgium, July 5-7, 2010 Mayuresh Kothare, Moses Tade, Alain Vande Wouwer, Ilse Smets (Eds.)
Real-Time Implementation of Nonlinear Predictive Control
 Real-Time Implementation of Nonlinear Predictive Control Michael A. Henson Department of Chemical Engineering University of Massachusetts Amherst, MA WebCAST October 2, 2008 1 Outline Limitations of linear
Real-Time Implementation of Nonlinear Predictive Control Michael A. Henson Department of Chemical Engineering University of Massachusetts Amherst, MA WebCAST October 2, 2008 1 Outline Limitations of linear
L 2 -induced Gains of Switched Systems and Classes of Switching Signals
 L 2 -induced Gains of Switched Systems and Classes of Switching Signals Kenji Hirata and João P. Hespanha Abstract This paper addresses the L 2-induced gain analysis for switched linear systems. We exploit
L 2 -induced Gains of Switched Systems and Classes of Switching Signals Kenji Hirata and João P. Hespanha Abstract This paper addresses the L 2-induced gain analysis for switched linear systems. We exploit
Adaptive Dynamic Inversion Control of a Linear Scalar Plant with Constrained Control Inputs
 5 American Control Conference June 8-, 5. Portland, OR, USA ThA. Adaptive Dynamic Inversion Control of a Linear Scalar Plant with Constrained Control Inputs Monish D. Tandale and John Valasek Abstract
5 American Control Conference June 8-, 5. Portland, OR, USA ThA. Adaptive Dynamic Inversion Control of a Linear Scalar Plant with Constrained Control Inputs Monish D. Tandale and John Valasek Abstract