Riemann Surface. David Gu. SMI 2012 Course. University of New York at Stony Brook. 1 Department of Computer Science
|
|
|
- Camron Pitts
- 6 years ago
- Views:
Transcription
1 Riemann Surface 1 1 Department of Computer Science University of New York at Stony Brook SMI 2012 Course
2 Thanks Thanks for the invitation.
3 Collaborators The work is collaborated with Shing-Tung Yau, Feng Luo, Tony Chan, Paul Thompson, Yalin Wang, Ronald Lok Ming Lui, Hong Qin, Dimitris Samaras, Jie Gao, Arie Kaufman, and many other mathematicians, computer scientists and medical doctors.
4 Klein s Program Klein s Erlangen Program Different geometries study the invariants under different transformation groups. Geometries Topology - homeomorphisms - Conformal Transformations Riemannian Geometry - Isometries Differential Geometry - Rigid Motion
5 Motivation Scientific View Conformal structure is a natural geometric structure; many physics phenomena are governed by conformal geometry, such as electro-magnetic fields, brownian motion, phase transition, percolation... Conformal geometry is part of nature.
6 Motivation Practical View Conformal geometry offers the theoretic frameworks for Shape Space Mapping Space
7 Shape Space A shape embedded in E 3 has the following level of information 1 Topological structure (genus, boundaries) 2 Conformal structure, (conformal module ) 3 Riemannian metric, (conformal factor) 4 Embedding structure, (mean curvature )
8 Shape Space Surfaces can be classified according to their geometric structures Each topological equivalent class has infinite many conformal equivalent classes, which form a finite dimensional Riemannian manifold. Each conformal equivalent class has infinite many isometric classes, which form an infinite dimensional space.
9 Mapping Space Given two metric surfaces, fixing the homotopy type, there are infinite many of diffeomorphisms between them, which form the mapping space. Each mapping uniquely determines a differential - Beltrami differential. Each Beltrami differential essentially uniquely determines a diffeomorphism. The mapping space is converted to a convex functional space. Variational calculus can be carried out in the functional space.
10 Motivation Conformal geometry lays down the theoretic foundation for Surface mapping Shape classification Shape analysis Applied in computer graphics, computer vision, geometric modeling, wireless sensor networking and medical imaging, and many other engineering, medical fields.
11 Sample of Applications 1 Computational Topology: Shortest word problem 2 Geometric Modeling: Manifold Spline 3 Graph Theory: Graph embedding 4 Meshing: Smooth surface meshing that ensures curvature convergence. 5 Shape Analysis: A discrete Heat kernel determines the discrete metric.
12 History History In pure mathematics, conformal geometry is the intersection of complex analysis, algebraic topology, Riemann surface theory, algebraic curves, differential geometry, partial differential equation. In applied mathematics, computational complex function theory has been developed, which focuses on the conformal mapping between planar domains. Recently, computational conformal geometry has been developed, which focuses on the conformal mapping between surfaces.
13 History History Conventional conformal geometric method can only handle the mappings among planar domains. Applied in thin plate deformation (biharmonic equation) Membrane vibration Electro-magnetic field design (Laplace equation) Fluid dynamics Aerospace design

14 Reasons for Booming Data Acquisition 3D scanning technology becomes mature, it is easier to obtain surface data.

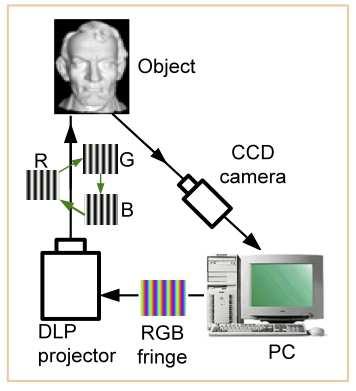
15 System Layout

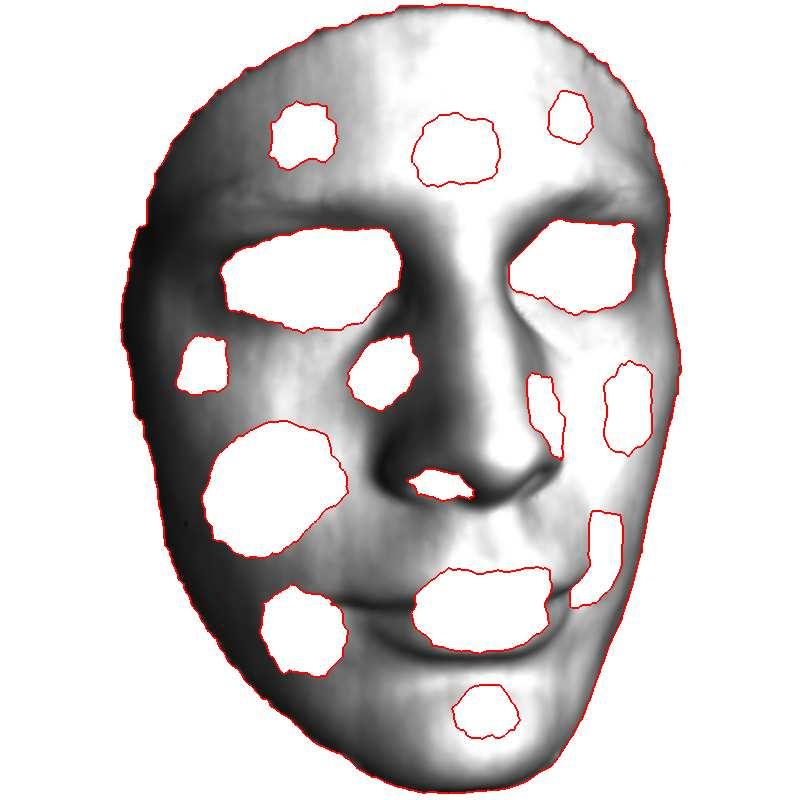
16 3D Scanning Results

17 3D Scanning Results


18 System Layout

19 Reasons for Booming Our group has developed high speed 3D scanner, which can capture dynamic surfaces 180 frames per second. Computational Power Computational power has been increased tremendously. With the incentive in graphics, GPU becomes mature, which makes numerical methods for solving PDE s much easier.
20 Fundamental Problems 1 Given a Riemannian metric on a surface with an arbitrary topology, determine the corresponding conformal structure. 2 Compute the complete conformal invariants (conformal modules), which are the coordinates of the surface in the Teichmuller shape space. 3 Fix the conformal structure, find the simplest Riemannian metric among all possible Riemannian metrics 4 Given desired Gaussian curvature, compute the corresponding Riemannian metric. 5 Given the distortion between two conformal structures, compute the quasi-conformal mapping. 6 Compute the extremal quasi-conformal maps. 7 Conformal welding, glue surfaces with various conformal modules, compute the conformal module of the glued surface.
21 Complete Tools Computational Library 1 Compute conformal mappings for surfaces with arbitrary topologies 2 Compute conformal modules for surfaces with arbitrary topologies 3 Compute Riemannian metrics with prescribed curvatures 4 Compute quasi-conformal mappings by solving Beltrami equation

22 Books The theory, algorithms and sample code can be found in the following books. You can find them in the book store.


23 Source Code Library Please me for updated code library on computational conformal geometry.
24 Conformal Mapping
25 Holomorphic Function Definition (Holomorphic Function) Suppose f :C C is a complex function, f : x+ iy u(x,y)+iv(x,y), if f satisfies Riemann-Cauchy equation u x = v y, u y = v x, then f is a holomorphic function. Denote dz= dx+idy,d z= dx idy, z = 1 2 ( x i y ), z = 1 2 ( x +i y ) then if f z = 0, then f is holomorphic.
 Suppose f :C C is")

26 biholomorphic Function Definition (biholomorphic Function) Suppose f :C C is invertible, both f and f 1 are holomorphic, then then f is a biholomorphic function. γ0 D 0 γ1 γ2 D 1

27 Conformal Map S 1 {(U α,φ α )} S 2 {(V β,τ β )} U α f V β φ α τ β z τ β f φ 1 α w The restriction of the mapping on each local chart is biholomorphic, then the mapping is conformal.


28 Conformal Mapping
 (S 2,g 2 ) is a homeomorphism, φ is")

29 Definition (Conformal Map) Let φ :(S 1,g 1 ) (S 2,g 2 ) is a homeomorphism, φ is conformal if and only if φ g 2 = e 2u g 1. Conformal Mapping preserves angles. θ θ


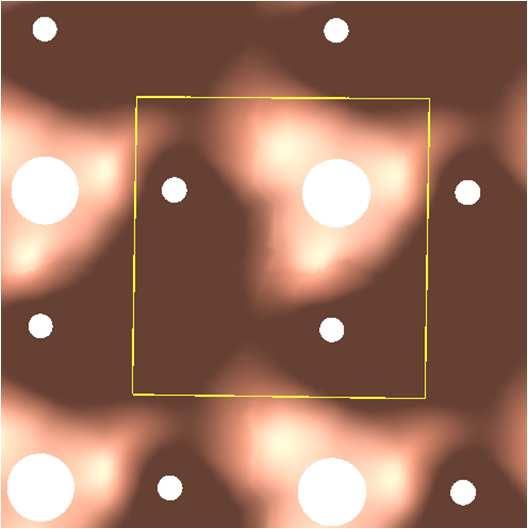
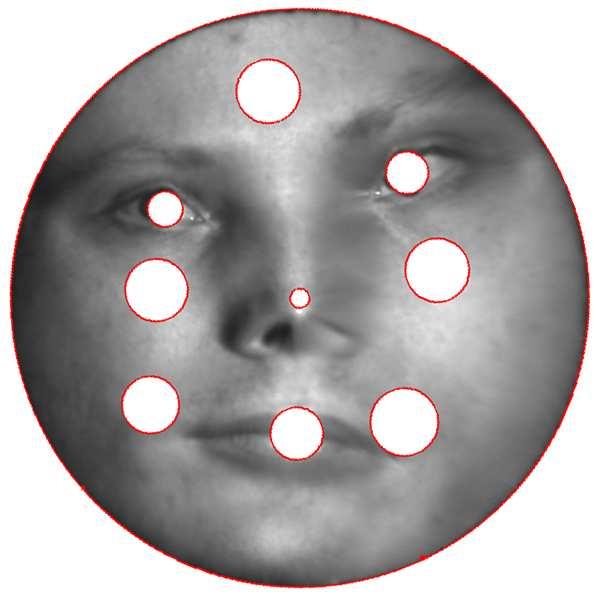
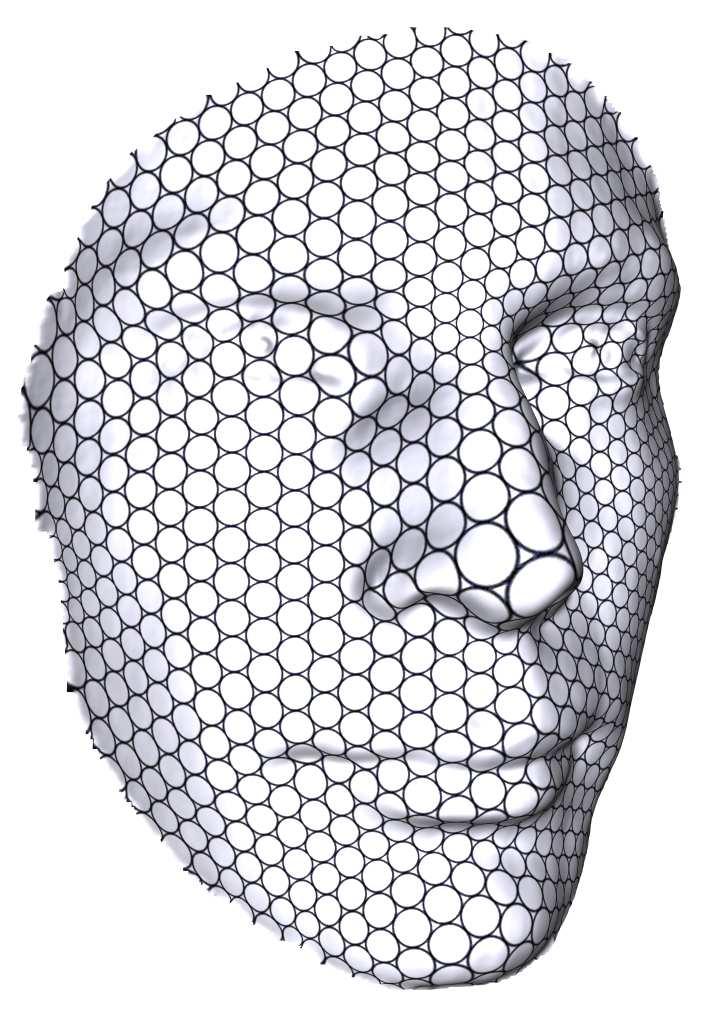
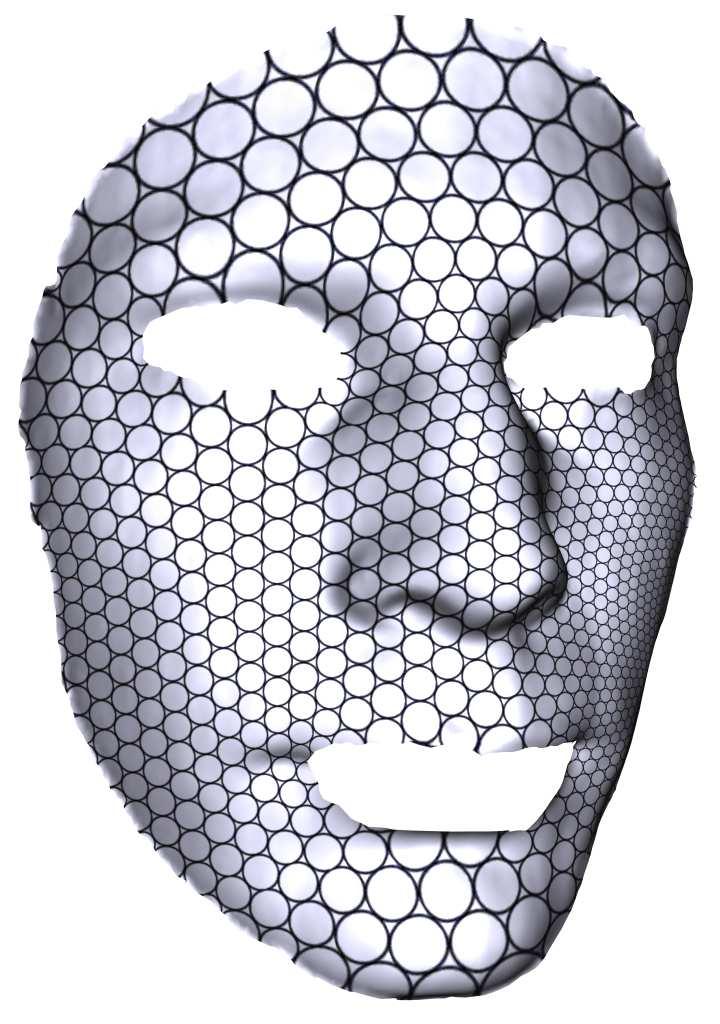
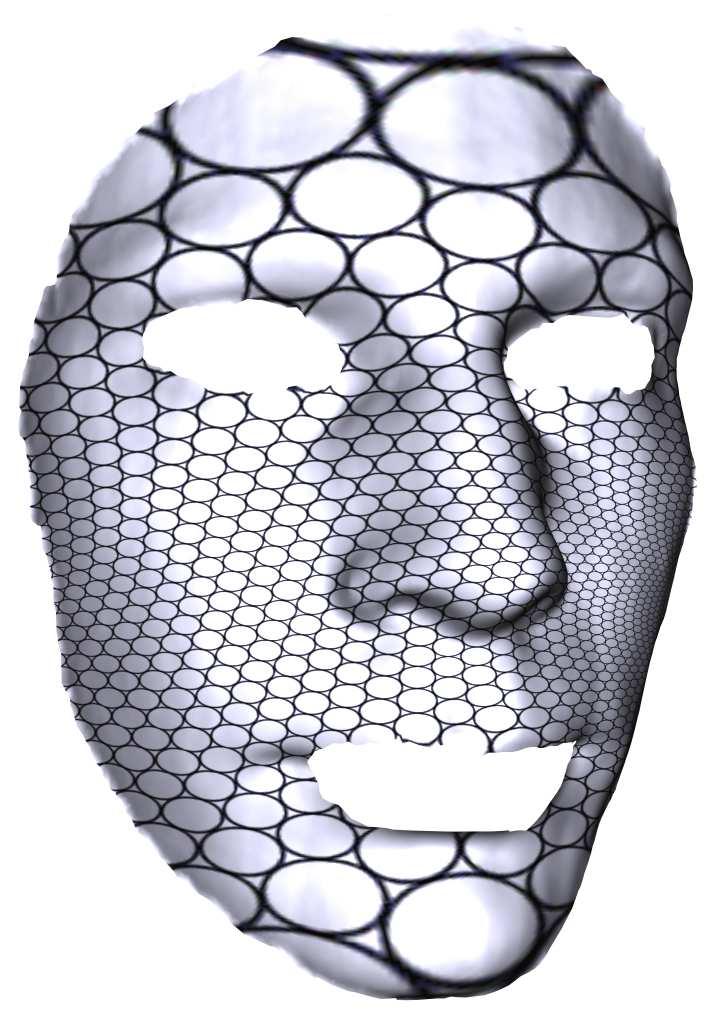
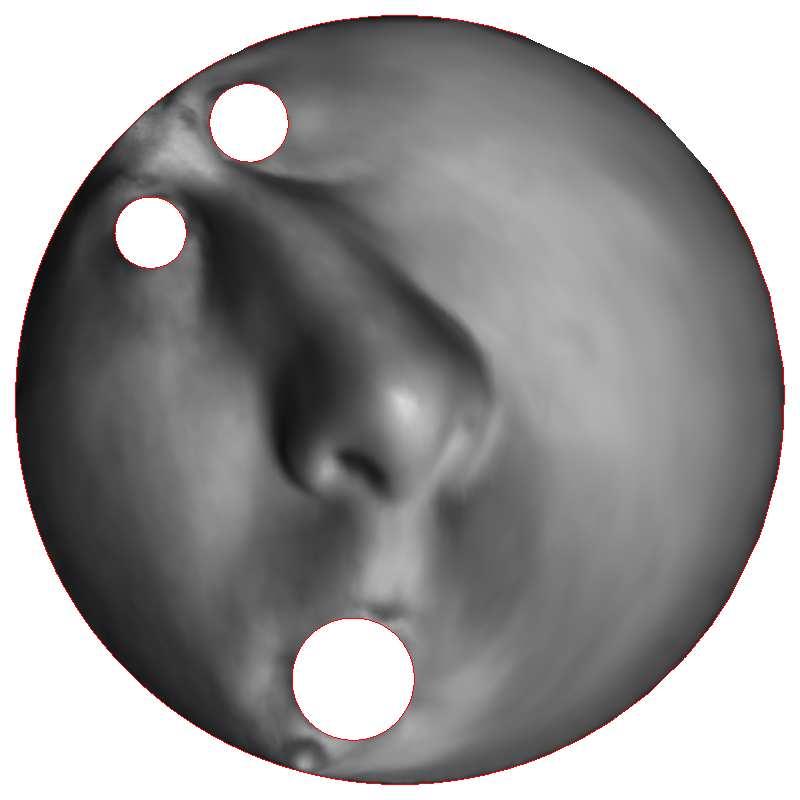
30 Conformal Mapping Conformal maps Properties Map a circle field on the surface to a circle field on the plane.
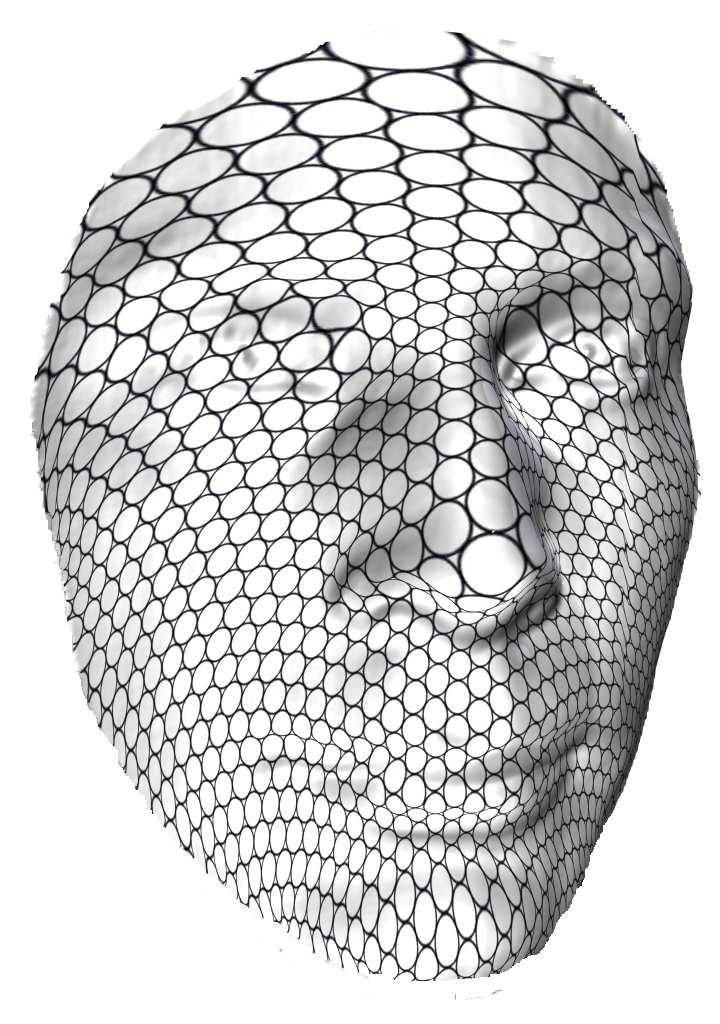
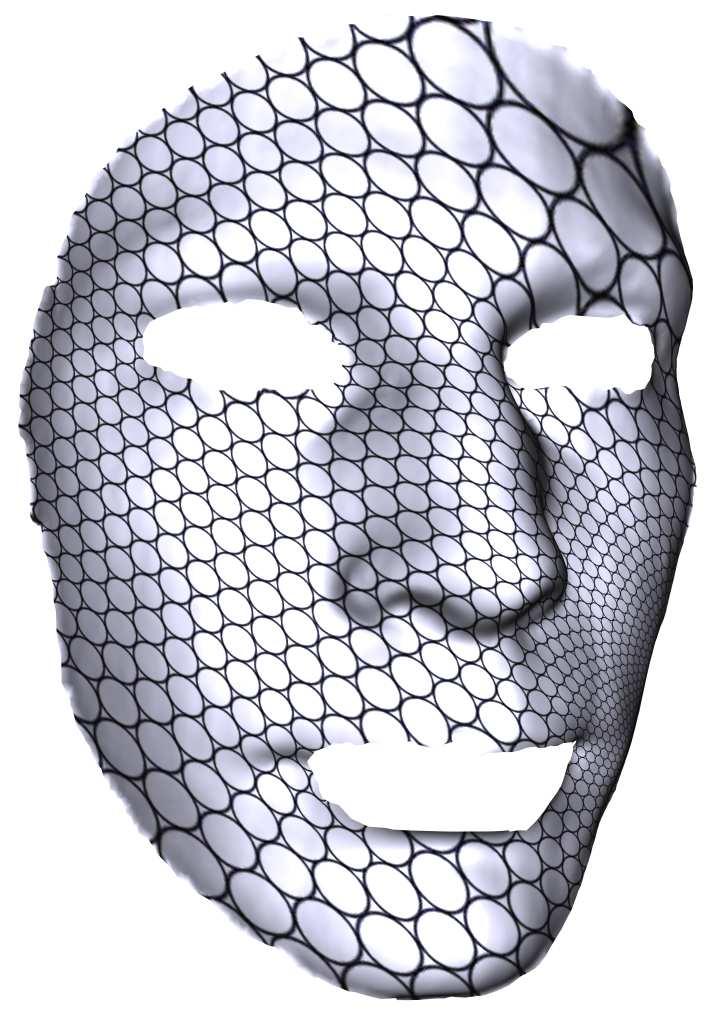
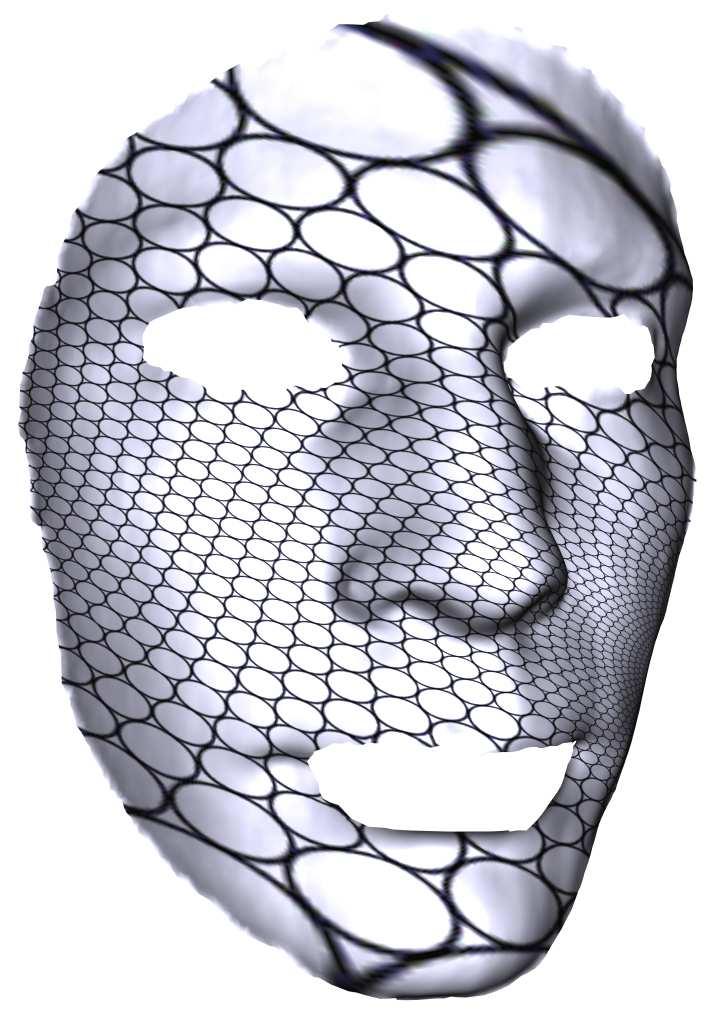
31 Quasi-Conformal Map Diffeomorphisms: maps ellipse field to circle field.
32 Conformal Structure
33 Riemann Surface Intuition 1 A conformal structure is a equipment on a surface, such that the angles can be measured, but the lengths, areas can not. 2 A Riemannian metric naturally induces a conformal structure. 3 Different Riemannian metrics can induce a same conformal structure.
34 Manifold Definition (Manifold) M is a topological space, {U α } α I is an open covering of M, M α U α. For each U α, φ α : U α R n is a homeomorphism. The pair (U α,φ α ) is a chart. Suppose U α U β = /0, the transition function φ αβ : φ α (U α U β ) φ β (U α U β ) is smooth φ αβ = φ β φ 1 α then M is called a smooth manifold, {(U α,φ α )} is called an atlas.
35 Manifold U α U β S φ α φ β φ αβ φ α (U α ) φ β (U β )
36 Conformal Atlas Definition (Conformal Atlas) Suppose S is a topological surface, (2 dimensional manifold), A is an atlas, such that all the chart transition functions φ αβ :C C are bi-holomorphic, then A is called a conformal atlas. Definition (Compatible Conformal Atlas) Suppose S is a topological surface, (2 dimensional manifold), A 1 and A 2 are two conformal atlases. If their union A 1 A 2 is still a conformal atlas, we say A 1 and A 2 are compatible.
37 Conformal Structure The compatible relation among conformal atlases is an equivalence relation. Definition (Conformal Structure) Suppose S is a topological surface, consider all the conformal atlases on M, classified by the compatible relation {all conformal atlas}/ each equivalence class is called a conformal structure. In other words, each maximal conformal atlas is a conformal structure.
38 Conformal Structure Definition (Conformal equivalent metrics) Suppose g 1,g 2 are two Riemannian metrics on a manifold M, if g 1 = e 2u g 2,u : M R then g 1 and g 2 are conformal equivalent. Definition (Conformal Structure) Consider all Riemannian metrics on a topological surface S, which are classified by the conformal equivalence relation, {Riemannian metrics on S}/, each equivalence class is called a conformal structure.
39 Relation between Riemannian metric and Conformal Structure Definition (Isothermal coordinates) Suppose (S,g) is a metric surface, (U α,φ α ) is a coordinate chart, (x, y) are local parameters, if g = e 2u (dx 2 + dy 2 ), then we say (x, y) are isothermal coordinates. Theorem Suppose S is a compact metric surface, for each point p, there exits a local coordinate chart (U,φ), such that p U, and the local coordinates are isothermal.
40 Riemannian metric and Conformal Structure Corollary For any compact metric surface, there exists a natural conformal structure. Definition (Riemann surface) A topological surface with a conformal structure is called a Riemann surface.
41 Riemannian metric and Conformal Structure Theorem All compact orientable metric surfaces are Riemann surfaces.
42 Uniformization

 Let (Σ, g) be a")



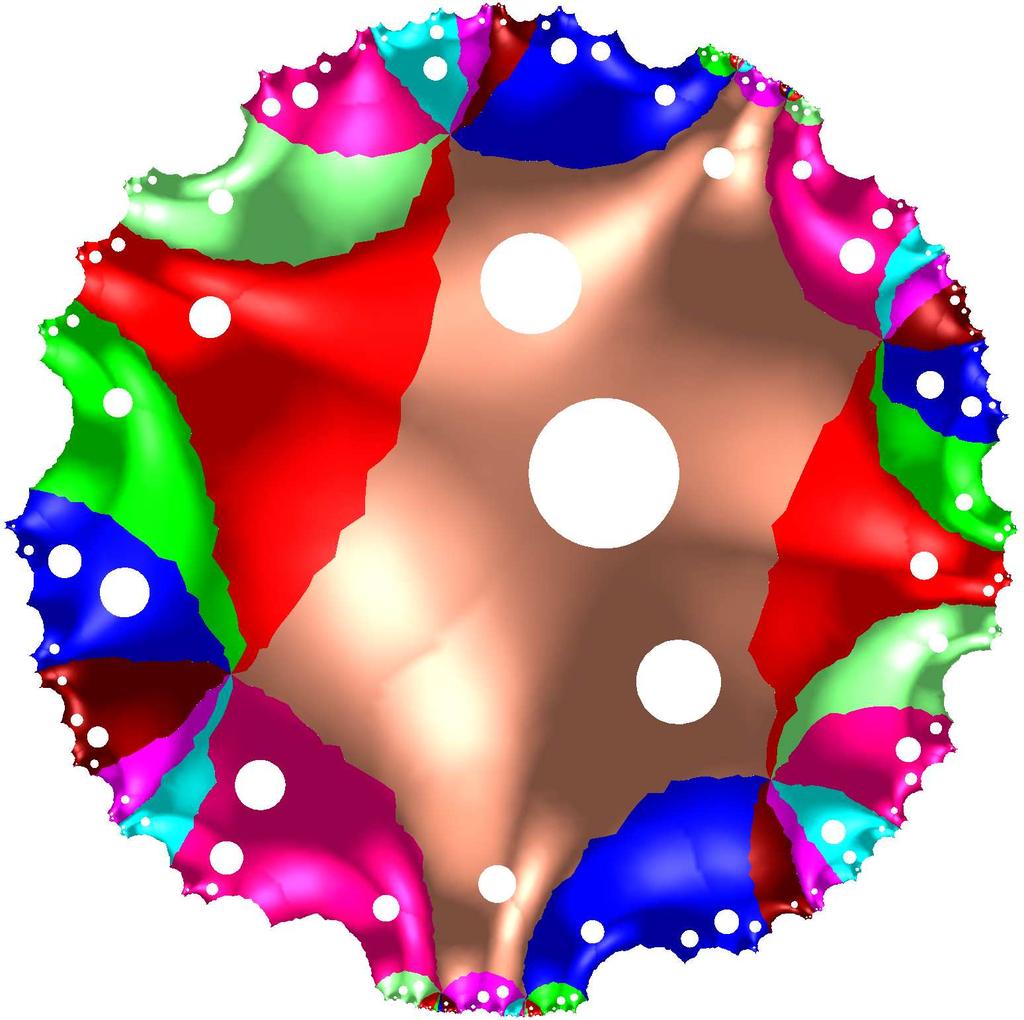
43 Conformal Canonical Representations Theorem (Poincaré Uniformization Theorem) Let (Σ, g) be a compact 2-dimensional Riemannian manifold. Then there is a metric g=e 2λ g conformal to g which has constant Gauss curvature. Spherical David Euclidean Gu Hyperbolic
44 Uniformization of Open Surfaces Definition (Circle Domain) A domain in the Riemann sphere Ĉ is called a circle domain if every connected component of its boundary is either a circle or a point. Theorem Any domain Ω in Ĉ, whose boundary Ω has at most countably many components, is conformally homeomorphic to a circle domain Ω in Ĉ. Moreover Ω is unique upto Möbius transformations, and every conformal automorphism of Ω is the restriction of a Möbius transformation.
45 Uniformization of Open Surfaces Spherical Euclidean Hyperbolic




46 Conformal Canonical Representation Simply Connected Domains

47 Conformal Canonical Forms Topological Quadrilateral p 4 p 3 p 1 p 2 p 4 p 3 p 1 p 2




48 Conformal Canonical Forms Multiply Connected Domains
49 Conformal Canonical Forms Multiply Connected Domains



50 Conformal Canonical Forms Multiply Connected Domains


51 Conformal Canonical Forms Multiply Connected Domains
52 Conformal Canonical Representations Definition (Circle Domain in a Riemann Surface) A circle domain in a Riemann surface is a domain, whose complement s connected components are all closed geometric disks and points. Here a geometric disk means a topological disk, whose lifts in the universal cover or the Riemann surface (which is H 2, R 2 or S 2 are round. Theorem Let Ω be an open Riemann surface with finite genus and at most countably many ends. Then there is a closed Riemann surface R such that Ω is conformally homeomorphic to a circle domain Ω in R. More over, the pair (R,Ω ) is unique up to conformal homeomorphism.


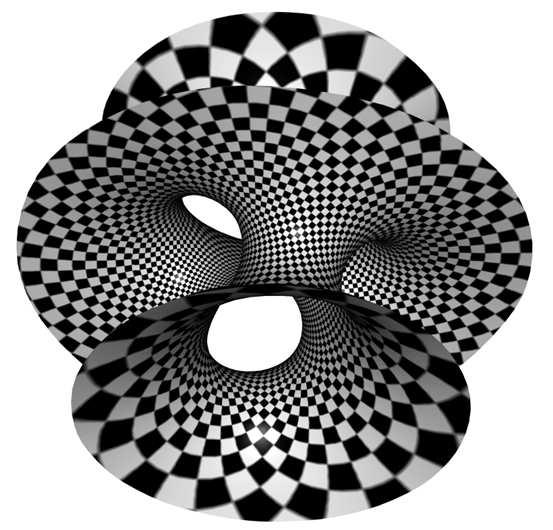
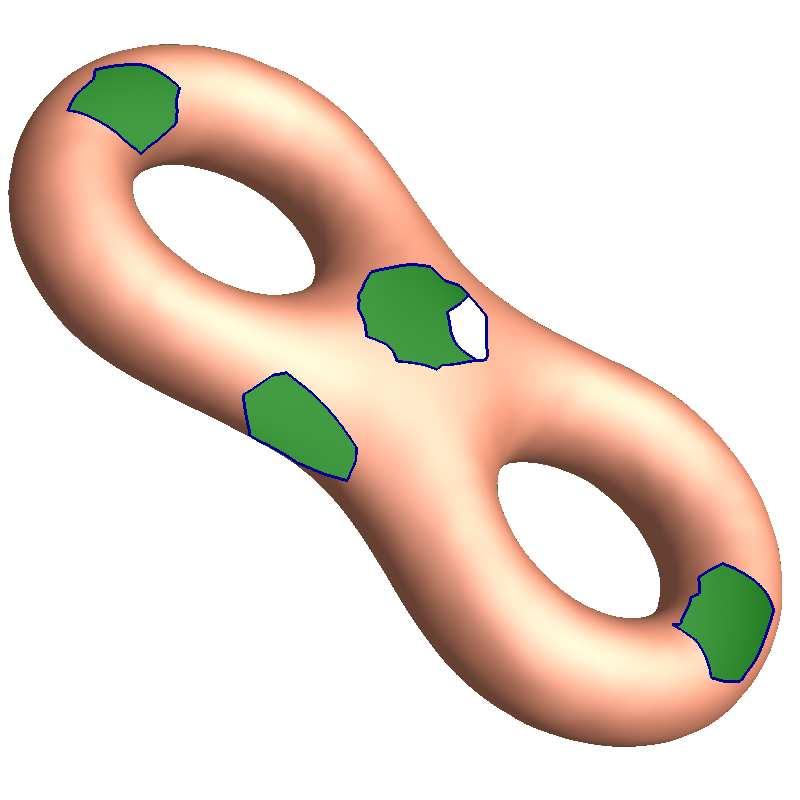
53 Conformal Canonical Form Tori with holes

54 Conformal Canonical Form High Genus Surface with holes
55 Teichmüller Space
56 Teichmüller Space Shape Space - Intuition 1 All metric surfaces are classified by conformal equivalence relation. 2 All conformal equivalences form a finite dimensional manifold. 3 The manifold has a natural Riemannian metric, which measures the distortions between two conformal structures.
57 Teichmüller Theory: Conformal Mapping Definition (Conformal Mapping) Suppose (S 1,g 1 ) and (S 2,g 2 ) are two metric surfaces, φ : S 1 S 2 is conformal, if on S 1 g 1 = e 2λ φ g 2, where φ g 2 is the pull-back metric induced by φ. Definition (Conformal Equivalence) Suppose two surfaces S 1,S 2 with marked homotopy group generators, {a i,b i } and {α i,β i }. If there exists a conformal map φ : S 1 S 2, such that φ [a i ]=[α i ],φ [b i ]=[β i ], then we say two marked surfaces are conformal equivalent.
58 Teichmüller Space Definition (Teichmüller Space) Fix the topology of a marked surface S, all conformal equivalence classes sharing the same topology of S, form a manifold, which is called the Teichmüller space of S. Denoted as T S. Each point represents a class of surfaces. A path represents a deformation process from one shape to the other. The Riemannian metric of Teichmüller space is well defined.
59 Teichmüller Space Topological Quadrilateral p 4 p 3 p 1 p 2 Conformal module: h w. The Teichmüller space is 1 dimensional.
60 Teichmüller Space Multiply Connected Domains Conformal Module : centers and radii, with Möbius ambiguity. The Teichmüller space is 3n 3 dimensional, n is the number of holes.


61 Topological Pants Genus 0 surface with 3 boundaries is conformally mapped to the hyperbolic plane, such that all boundaries become geodesics.




62 Teichmüller Space Topological Pants γ 1 γ 2 γ 0 γ 0 τ 2 γ 0 2 τ0 γ1 2 γ1 τ0 γ 1 2 τ 1 τ 22 γ2 2 τ1 τ2 2 γ2 2 τ1 τ 0 τ 22 γ0 2 γ0 2 γ 1 2 τ 1 τ 2 γ 0 2
63 Teichmüller Space Topological Pants Decomposition - 2g 2 pairs of Pants P1 γ p1 p2 P2 θ



64 Compute Teichmüller coordinates Step 1. Compute the hyperbolic uniformization metric. Step 2. Compute the Fuchsian group generators.

65 Compute Teichmüller Coordinates Step 3. Pants decomposition using geodesics and compute the twisting angle.

66 Teichmüller Coordinates Compute Teichmüller coordinates Compute the pants decomposition using geodesics and compute the twisting angle.
67 Quasi-Conformal Maps
68 Quasi-Conformal Mappings Intuition 1 All diffeomorphisms between two compact Riemann surfaces are quasi-conformal. 2 Each quasi-conformal mapping corresponds to a unique Beltrami differential. 3 The space of diffeomorphisms equals to the space of all Beltrami differentials. 4 Variational calculus can be carried out on the space of diffeomorphisms.


69 Quasi-Conformal Map Most homeomorphisms are quasi-conformal, which maps infinitesimal circles to ellipses.

70 Beltrami-Equation Beltrami Coefficient Let φ : S 1 S 2 be the map, z,w are isothermal coordinates of S 1, S 2, Beltrami equation is defined as µ < 1 φ z = µ(z) φ z
71 Diffeomorphism Space Theorem Given two genus zero metric surface with a single boundary, {Diffeomorphisms} = {Beltrami Coefficient}. {Mobius}
72 Solving Beltrami Equation The problem of computing Quasi-conformal map is converted to compute a conformal map. Solveing Beltrami Equation Given metric surfaces (S 1,g 1 ) and (S 2,g 2 ), let z,w be isothermal coordinates of S 1,S 2,w = φ(z). Then g 1 = e 2u 1 dzd z (1) g 2 = e 2u 2 dwd w, (2) φ :(S 1,g 1 ) (S 2,g 2 ), quasi-conformal with Beltrami coefficient µ. φ :(S 1,φ g 2 ) (S 2,g 2 ) is isometric φ g 2 = e u 2 dw 2 = e u 2 dz+ µddz 2. φ :(S 1, dz+ µddz 2 ) (S 2,g 2 ) is conformal.


73 Quasi-Conformal Map Examples D3 D2 D0 p q p q D1 D3 D2 D0 p q D1

74 Quasi-Conformal Map Examples
75 Variational Calculus on Diffeomorphism Space Let {µ(t)} be a family of Beltrami coefficients depends on a parameter t, µ(t)(z) = µ(z)+tν(z)+tε(t)(z) for z C, with suitable µ, ν,ε(t) L (C), where as t 0, f µ(t) (w)=f µ (w)+tv(f µ,ν)(w)+o( t ), V(f µ,ν)(w)= f µ (w)(f µ (w) 1) ν(z)((f µ ) z (z)) 2 π C f µ (z)(f µ (z) 1)(f µ (z) f µ (w)) dx

76 Solving Beltrami Equation
77 Summary Conformal structure is more flexible than Riemannian metric Conformal structure is more rigid than topology Conformal geometry can be used for a broad range of engineering applications.

78 Thanks For more information, please to Thank you!
Tutorial on Surface Ricci Flow, Theory, Algorithm and Application
 Tutorial on Surface Ricci Flow, Theory, Algorithm and Application 1 1 Department of Computer Science University of New York at Stony Brook Graduate Summer School: Computer Vision, IPAM, UCLA Collaborators
Tutorial on Surface Ricci Flow, Theory, Algorithm and Application 1 1 Department of Computer Science University of New York at Stony Brook Graduate Summer School: Computer Vision, IPAM, UCLA Collaborators
Möbius Transformation
 Möbius Transformation 1 1 June 15th, 2010 Mathematics Science Center Tsinghua University Philosophy Rigidity Conformal mappings have rigidity. The diffeomorphism group is of infinite dimension in general.
Möbius Transformation 1 1 June 15th, 2010 Mathematics Science Center Tsinghua University Philosophy Rigidity Conformal mappings have rigidity. The diffeomorphism group is of infinite dimension in general.
Introduction to Teichmüller Spaces
 Introduction to Teichmüller Spaces Jing Tao Notes by Serena Yuan 1. Riemann Surfaces Definition 1.1. A conformal structure is an atlas on a manifold such that the differentials of the transition maps lie
Introduction to Teichmüller Spaces Jing Tao Notes by Serena Yuan 1. Riemann Surfaces Definition 1.1. A conformal structure is an atlas on a manifold such that the differentials of the transition maps lie
William P. Thurston. The Geometry and Topology of Three-Manifolds
 William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 00 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 00 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
TEICHMÜLLER SPACE MATTHEW WOOLF
 TEICHMÜLLER SPACE MATTHEW WOOLF Abstract. It is a well-known fact that every Riemann surface with negative Euler characteristic admits a hyperbolic metric. But this metric is by no means unique indeed,
TEICHMÜLLER SPACE MATTHEW WOOLF Abstract. It is a well-known fact that every Riemann surface with negative Euler characteristic admits a hyperbolic metric. But this metric is by no means unique indeed,
PICARD S THEOREM STEFAN FRIEDL
 PICARD S THEOREM STEFAN FRIEDL Abstract. We give a summary for the proof of Picard s Theorem. The proof is for the most part an excerpt of [F]. 1. Introduction Definition. Let U C be an open subset. A
PICARD S THEOREM STEFAN FRIEDL Abstract. We give a summary for the proof of Picard s Theorem. The proof is for the most part an excerpt of [F]. 1. Introduction Definition. Let U C be an open subset. A
The Geometrization Theorem
 The Geometrization Theorem Matthew D. Brown Wednesday, December 19, 2012 In this paper, we discuss the Geometrization Theorem, formerly Thurston s Geometrization Conjecture, which is essentially the statement
The Geometrization Theorem Matthew D. Brown Wednesday, December 19, 2012 In this paper, we discuss the Geometrization Theorem, formerly Thurston s Geometrization Conjecture, which is essentially the statement
Part IB GEOMETRY (Lent 2016): Example Sheet 1
: Example Sheet 1") Part IB GEOMETRY (Lent 2016): Example Sheet 1 (a.g.kovalev@dpmms.cam.ac.uk) 1. Suppose that H is a hyperplane in Euclidean n-space R n defined by u x = c for some unit vector u and constant c. The reflection
Part IB GEOMETRY (Lent 2016): Example Sheet 1 (a.g.kovalev@dpmms.cam.ac.uk) 1. Suppose that H is a hyperplane in Euclidean n-space R n defined by u x = c for some unit vector u and constant c. The reflection
Quasi-conformal maps and Beltrami equation
 Chapter 7 Quasi-conformal maps and Beltrami equation 7. Linear distortion Assume that f(x + iy) =u(x + iy)+iv(x + iy) be a (real) linear map from C C that is orientation preserving. Let z = x + iy and
Chapter 7 Quasi-conformal maps and Beltrami equation 7. Linear distortion Assume that f(x + iy) =u(x + iy)+iv(x + iy) be a (real) linear map from C C that is orientation preserving. Let z = x + iy and
612 CLASS LECTURE: HYPERBOLIC GEOMETRY
 612 CLASS LECTURE: HYPERBOLIC GEOMETRY JOSHUA P. BOWMAN 1. Conformal metrics As a vector space, C has a canonical norm, the same as the standard R 2 norm. Denote this dz one should think of dz as the identity
612 CLASS LECTURE: HYPERBOLIC GEOMETRY JOSHUA P. BOWMAN 1. Conformal metrics As a vector space, C has a canonical norm, the same as the standard R 2 norm. Denote this dz one should think of dz as the identity
ON FENCHEL NIELSEN COORDINATES ON TEICHMÜLLER SPACES OF SURFACES OF INFINITE TYPE
 Annales Academiæ Scientiarum Fennicæ Mathematica Volumen 36, 2011, 621 659 ON FENCHEL NIELSEN COORDINATES ON TEICHMÜLLER SPACES OF SURFACES OF INFINITE TYPE Daniele Alessandrini, Lixin Liu, Athanase Papadopoulos,
Annales Academiæ Scientiarum Fennicæ Mathematica Volumen 36, 2011, 621 659 ON FENCHEL NIELSEN COORDINATES ON TEICHMÜLLER SPACES OF SURFACES OF INFINITE TYPE Daniele Alessandrini, Lixin Liu, Athanase Papadopoulos,
Discrete Euclidean Curvature Flows
 Discrete Euclidean Curvature Flows 1 1 Department of Computer Science SUNY at Stony Brook Tsinghua University 2010 Isothermal Coordinates Relation between conformal structure and Riemannian metric Isothermal
Discrete Euclidean Curvature Flows 1 1 Department of Computer Science SUNY at Stony Brook Tsinghua University 2010 Isothermal Coordinates Relation between conformal structure and Riemannian metric Isothermal
Part IB Geometry. Theorems. Based on lectures by A. G. Kovalev Notes taken by Dexter Chua. Lent 2016
 Part IB Geometry Theorems Based on lectures by A. G. Kovalev Notes taken by Dexter Chua Lent 2016 These notes are not endorsed by the lecturers, and I have modified them (often significantly) after lectures.
Part IB Geometry Theorems Based on lectures by A. G. Kovalev Notes taken by Dexter Chua Lent 2016 These notes are not endorsed by the lecturers, and I have modified them (often significantly) after lectures.
DIFFERENTIAL GEOMETRY HW 5
 DIFFERENTIAL GEOMETRY HW 5 CLAY SHONKWILER 1 Check the calculations above that the Gaussian curvature of the upper half-plane and Poincaré disk models of the hyperbolic plane is 1. Proof. The calculations
DIFFERENTIAL GEOMETRY HW 5 CLAY SHONKWILER 1 Check the calculations above that the Gaussian curvature of the upper half-plane and Poincaré disk models of the hyperbolic plane is 1. Proof. The calculations
HYPERBOLIC GEOMETRY AND HEEGAARD SPLITTINGS
 HYPERBOLIC GEOMETRY AND HEEGAARD SPLITTINGS TALK GIVEN BY HOSSEIN NAMAZI 1. Preliminary Remarks The lecture is based on joint work with J. Brock, Y. Minsky and J. Souto. Example. Suppose H + and H are
HYPERBOLIC GEOMETRY AND HEEGAARD SPLITTINGS TALK GIVEN BY HOSSEIN NAMAZI 1. Preliminary Remarks The lecture is based on joint work with J. Brock, Y. Minsky and J. Souto. Example. Suppose H + and H are
Definition We say that a topological manifold X is C p if there is an atlas such that the transition functions are C p.
 13. Riemann surfaces Definition 13.1. Let X be a topological space. We say that X is a topological manifold, if (1) X is Hausdorff, (2) X is 2nd countable (that is, there is a base for the topology which
13. Riemann surfaces Definition 13.1. Let X be a topological space. We say that X is a topological manifold, if (1) X is Hausdorff, (2) X is 2nd countable (that is, there is a base for the topology which
Grafting Coordinates for Teichmüller Space
 Grafting Coordinates for Teichmüller Space October 2006 David Dumas (ddumas@math.brown.edu) http://www.math.brown.edu/ ddumas/ (Joint work with Mike Wolf) 2 Grafting Start with X, a closed hyperbolic surface,
Grafting Coordinates for Teichmüller Space October 2006 David Dumas (ddumas@math.brown.edu) http://www.math.brown.edu/ ddumas/ (Joint work with Mike Wolf) 2 Grafting Start with X, a closed hyperbolic surface,
Action of mapping class group on extended Bers slice
 Action of mapping class group on extended Bers slice (Kentaro Ito) 1 Introduction Let S be an oriented closed surface of genus g 2. Put V (S) = Hom(π 1 (S), PSL 2 (C))/PSL 2 (C). Let X be an element of
Action of mapping class group on extended Bers slice (Kentaro Ito) 1 Introduction Let S be an oriented closed surface of genus g 2. Put V (S) = Hom(π 1 (S), PSL 2 (C))/PSL 2 (C). Let X be an element of
THE UNIFORMISATION THEOREM OF RIEMANN SURFACES
 THE UNIFORISATION THEORE OF RIEANN SURFACES 1. What is the aim of this seminar? Recall that a compact oriented surface is a g -holed object. (Classification of surfaces.) It can be obtained through a 4g
THE UNIFORISATION THEORE OF RIEANN SURFACES 1. What is the aim of this seminar? Recall that a compact oriented surface is a g -holed object. (Classification of surfaces.) It can be obtained through a 4g
Quasiconformal Maps and Circle Packings
 Quasiconformal Maps and Circle Packings Brett Leroux June 11, 2018 1 Introduction Recall the statement of the Riemann mapping theorem: Theorem 1 (Riemann Mapping). If R is a simply connected region in
Quasiconformal Maps and Circle Packings Brett Leroux June 11, 2018 1 Introduction Recall the statement of the Riemann mapping theorem: Theorem 1 (Riemann Mapping). If R is a simply connected region in
Masahiro Yanagishita. Riemann surfaces and Discontinuous groups 2014 February 16th, 2015
 Complex analytic structure on the p-integrable Teichmüller space Masahiro Yanagishita Department of Mathematics, Waseda University JSPS Research Fellow Riemann surfaces and Discontinuous groups 2014 February
Complex analytic structure on the p-integrable Teichmüller space Masahiro Yanagishita Department of Mathematics, Waseda University JSPS Research Fellow Riemann surfaces and Discontinuous groups 2014 February
New Deformations of Classical Minimal Surfaces
 New Deformations of Classical Minimal Surfaces Adam G. Weyhaupt Department of Mathematics Indiana University Southern Illinois University Edwardsville March 7, 2006 Outline Minimal surfaces: definitions,
New Deformations of Classical Minimal Surfaces Adam G. Weyhaupt Department of Mathematics Indiana University Southern Illinois University Edwardsville March 7, 2006 Outline Minimal surfaces: definitions,
The Theorem of Gauß-Bonnet in Complex Analysis 1
 The Theorem of Gauß-Bonnet in Complex Analysis 1 Otto Forster Abstract. The theorem of Gauß-Bonnet is interpreted within the framework of Complex Analysis of one and several variables. Geodesic triangles
The Theorem of Gauß-Bonnet in Complex Analysis 1 Otto Forster Abstract. The theorem of Gauß-Bonnet is interpreted within the framework of Complex Analysis of one and several variables. Geodesic triangles
LECTURE 28: VECTOR BUNDLES AND FIBER BUNDLES
 LECTURE 28: VECTOR BUNDLES AND FIBER BUNDLES 1. Vector Bundles In general, smooth manifolds are very non-linear. However, there exist many smooth manifolds which admit very nice partial linear structures.
LECTURE 28: VECTOR BUNDLES AND FIBER BUNDLES 1. Vector Bundles In general, smooth manifolds are very non-linear. However, there exist many smooth manifolds which admit very nice partial linear structures.
Bending deformation of quasi-fuchsian groups
 Bending deformation of quasi-fuchsian groups Yuichi Kabaya (Osaka University) Meiji University, 30 Nov 2013 1 Outline The shape of the set of discrete faithful representations in the character variety
Bending deformation of quasi-fuchsian groups Yuichi Kabaya (Osaka University) Meiji University, 30 Nov 2013 1 Outline The shape of the set of discrete faithful representations in the character variety
Summary of Prof. Yau s lecture, Monday, April 2 [with additional references and remarks] (for people who missed the lecture)
![Summary of Prof. Yau s lecture, Monday, April 2 [with additional references and remarks] (for people who missed the lecture)](/thumbs/92/110366431.jpg "Summary of Prof. Yau s lecture, Monday, April 2 [with additional references and remarks] (for people who missed the lecture)") Building Geometric Structures: Summary of Prof. Yau s lecture, Monday, April 2 [with additional references and remarks] (for people who missed the lecture) A geometric structure on a manifold is a cover
Building Geometric Structures: Summary of Prof. Yau s lecture, Monday, April 2 [with additional references and remarks] (for people who missed the lecture) A geometric structure on a manifold is a cover
274 Curves on Surfaces, Lecture 4
 274 Curves on Surfaces, Lecture 4 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 4 Hyperbolic geometry Last time there was an exercise asking for braids giving the torsion elements in PSL 2 (Z). A 3-torsion
274 Curves on Surfaces, Lecture 4 Dylan Thurston Notes by Qiaochu Yuan Fall 2012 4 Hyperbolic geometry Last time there was an exercise asking for braids giving the torsion elements in PSL 2 (Z). A 3-torsion
Geometric structures on 3 manifolds
 CHAPTER 3.14159265358979... Geometric structures on 3 manifolds Francis Bonahon Department of Mathematics University of Southern California Los Angeles, CA 90089 1113, U.S.A. Contents 1. Geometric structures.........................................................
CHAPTER 3.14159265358979... Geometric structures on 3 manifolds Francis Bonahon Department of Mathematics University of Southern California Los Angeles, CA 90089 1113, U.S.A. Contents 1. Geometric structures.........................................................
Convex Projective Structures on Non-hyperbolic 3-manifolds
 Convex Projective Structures on Non-hyperbolic 3-manifolds Sam Ballas (joint with J. Danciger and G.-S. Lee) Higher Teichmüller theory and Higgs bundles Heidelberg November 3, 2015 Overview If you want
Convex Projective Structures on Non-hyperbolic 3-manifolds Sam Ballas (joint with J. Danciger and G.-S. Lee) Higher Teichmüller theory and Higgs bundles Heidelberg November 3, 2015 Overview If you want
Hyperbolic Geometry on Geometric Surfaces
 Mathematics Seminar, 15 September 2010 Outline Introduction Hyperbolic geometry Abstract surfaces The hemisphere model as a geometric surface The Poincaré disk model as a geometric surface Conclusion Introduction
Mathematics Seminar, 15 September 2010 Outline Introduction Hyperbolic geometry Abstract surfaces The hemisphere model as a geometric surface The Poincaré disk model as a geometric surface Conclusion Introduction
1 Hermitian symmetric spaces: examples and basic properties
 Contents 1 Hermitian symmetric spaces: examples and basic properties 1 1.1 Almost complex manifolds............................................ 1 1.2 Hermitian manifolds................................................
Contents 1 Hermitian symmetric spaces: examples and basic properties 1 1.1 Almost complex manifolds............................................ 1 1.2 Hermitian manifolds................................................
Bounded and integrable quadratic differentials: hyperbolic and extremal lengths on Riemann surfaces
 Geometric Complex Analysis edited by Junjiro Noguchi et al. World Scientific, Singapore, 1995 pp.443 450 Bounded and integrable quadratic differentials: hyperbolic and extremal lengths on Riemann surfaces
Geometric Complex Analysis edited by Junjiro Noguchi et al. World Scientific, Singapore, 1995 pp.443 450 Bounded and integrable quadratic differentials: hyperbolic and extremal lengths on Riemann surfaces
Before you begin read these instructions carefully.
 MATHEMATICAL TRIPOS Part IB Thursday, 6 June, 2013 9:00 am to 12:00 pm PAPER 3 Before you begin read these instructions carefully. Each question in Section II carries twice the number of marks of each
MATHEMATICAL TRIPOS Part IB Thursday, 6 June, 2013 9:00 am to 12:00 pm PAPER 3 Before you begin read these instructions carefully. Each question in Section II carries twice the number of marks of each
The 3-Dimensional Geometrisation Conjecture Of W. P. Thurston
 The 3-Dimensional Geometrisation Conjecture Of W. P. Thurston May 14, 2002 Contents 1 Introduction 2 2 G-manifolds 3 2.1 Definitions and basic examples................... 3 2.2 Foliations...............................
The 3-Dimensional Geometrisation Conjecture Of W. P. Thurston May 14, 2002 Contents 1 Introduction 2 2 G-manifolds 3 2.1 Definitions and basic examples................... 3 2.2 Foliations...............................
Min-max methods in Geometry. André Neves
 Min-max methods in Geometry André Neves Outline 1 Min-max theory overview 2 Applications in Geometry 3 Some new progress Min-max Theory Consider a space Z and a functional F : Z [0, ]. How to find critical
Min-max methods in Geometry André Neves Outline 1 Min-max theory overview 2 Applications in Geometry 3 Some new progress Min-max Theory Consider a space Z and a functional F : Z [0, ]. How to find critical
Manifolds, Lie Groups, Lie Algebras, with Applications. Kurt W.A.J.H.Y. Reillag (alias Jean Gallier) CIS610, Spring 2005
 CIS610, Spring 2005") Manifolds, Lie Groups, Lie Algebras, with Applications Kurt W.A.J.H.Y. Reillag (alias Jean Gallier) CIS610, Spring 2005 1 Motivations and Goals 1. Motivations Observation: Often, the set of all objects
Manifolds, Lie Groups, Lie Algebras, with Applications Kurt W.A.J.H.Y. Reillag (alias Jean Gallier) CIS610, Spring 2005 1 Motivations and Goals 1. Motivations Observation: Often, the set of all objects
Hyperbolic Discrete Ricci Curvature Flows
 Hyperbolic Discrete Ricci Curvature Flows 1 1 Mathematics Science Center Tsinghua University Tsinghua University 010 Unified Framework of Discrete Curvature Flow Unified framework for both Discrete Ricci
Hyperbolic Discrete Ricci Curvature Flows 1 1 Mathematics Science Center Tsinghua University Tsinghua University 010 Unified Framework of Discrete Curvature Flow Unified framework for both Discrete Ricci
Quasi-local mass and isometric embedding
 Quasi-local mass and isometric embedding Mu-Tao Wang, Columbia University September 23, 2015, IHP Recent Advances in Mathematical General Relativity Joint work with Po-Ning Chen and Shing-Tung Yau. The
Quasi-local mass and isometric embedding Mu-Tao Wang, Columbia University September 23, 2015, IHP Recent Advances in Mathematical General Relativity Joint work with Po-Ning Chen and Shing-Tung Yau. The
ON THE MEAN CURVATURE FUNCTION FOR COMPACT SURFACES
 J. DIFFERENTIAL GEOMETRY 16 (1981) 179-183 ON THE MEAN CURVATURE FUNCTION FOR COMPACT SURFACES H. BLAINE LAWSON, JR. & RENATO DE AZEVEDO TRIBUZY Dedicated to Professor Buchin Su on his SOth birthday It
J. DIFFERENTIAL GEOMETRY 16 (1981) 179-183 ON THE MEAN CURVATURE FUNCTION FOR COMPACT SURFACES H. BLAINE LAWSON, JR. & RENATO DE AZEVEDO TRIBUZY Dedicated to Professor Buchin Su on his SOth birthday It
Index. Bertrand mate, 89 bijection, 48 bitangent, 69 Bolyai, 339 Bonnet s Formula, 283 bounded, 48
 Index acceleration, 14, 76, 355 centripetal, 27 tangential, 27 algebraic geometry, vii analytic, 44 angle at a corner, 21 on a regular surface, 170 angle excess, 337 angle of parallelism, 344 angular velocity,
Index acceleration, 14, 76, 355 centripetal, 27 tangential, 27 algebraic geometry, vii analytic, 44 angle at a corner, 21 on a regular surface, 170 angle excess, 337 angle of parallelism, 344 angular velocity,
ON A DISTANCE DEFINED BY THE LENGTH SPECTRUM ON TEICHMÜLLER SPACE
 Annales Academiæ Scientiarum Fennicæ Mathematica Volumen 28, 2003, 315 326 ON A DISTANCE DEFINED BY THE LENGTH SPECTRUM ON TEICHMÜLLER SPACE Hiroshige Shiga Tokyo Institute of Technology, Department of
Annales Academiæ Scientiarum Fennicæ Mathematica Volumen 28, 2003, 315 326 ON A DISTANCE DEFINED BY THE LENGTH SPECTRUM ON TEICHMÜLLER SPACE Hiroshige Shiga Tokyo Institute of Technology, Department of
SMSTC Geometry and Topology
 SMSTC Geometry and Topology 2013-2014 1 Andrew Ranicki http://www.maths.ed.ac.uk/ aar SMSTC Symposium Perth, 9th October, 2013 http://www.smstc.ac.uk http://www.maths.ed.ac.uk/ aar/smstc/gt34info.pdf http://www.maths.ed.ac.uk/
SMSTC Geometry and Topology 2013-2014 1 Andrew Ranicki http://www.maths.ed.ac.uk/ aar SMSTC Symposium Perth, 9th October, 2013 http://www.smstc.ac.uk http://www.maths.ed.ac.uk/ aar/smstc/gt34info.pdf http://www.maths.ed.ac.uk/
Introduction to Minimal Surface Theory: Lecture 2
 Introduction to Minimal Surface Theory: Lecture 2 Brian White July 2, 2013 (Park City) Other characterizations of 2d minimal surfaces in R 3 By a theorem of Morrey, every surface admits local isothermal
Introduction to Minimal Surface Theory: Lecture 2 Brian White July 2, 2013 (Park City) Other characterizations of 2d minimal surfaces in R 3 By a theorem of Morrey, every surface admits local isothermal
Chapter 19 Clifford and the Number of Holes
 Chapter 19 Clifford and the Number of Holes We saw that Riemann denoted the genus by p, a notation which is still frequently used today, in particular for the generalizations of this notion in higher dimensions.
Chapter 19 Clifford and the Number of Holes We saw that Riemann denoted the genus by p, a notation which is still frequently used today, in particular for the generalizations of this notion in higher dimensions.
Delaunay triangulations on hyperbolic surfaces
 Delaunay triangulations on hyperbolic surfaces Master Project Mathematics August 1, 017 Student: Y.M. Ebbens First supervisor: Prof.dr. G. Vegter Second supervisor: Dr. A.E. Sterk Abstract There exist
Delaunay triangulations on hyperbolic surfaces Master Project Mathematics August 1, 017 Student: Y.M. Ebbens First supervisor: Prof.dr. G. Vegter Second supervisor: Dr. A.E. Sterk Abstract There exist
Groups up to quasi-isometry
 OSU November 29, 2007 1 Introduction 2 3 Topological methods in group theory via the fundamental group. group theory topology group Γ, a topological space X with π 1 (X) = Γ. Γ acts on the universal cover
OSU November 29, 2007 1 Introduction 2 3 Topological methods in group theory via the fundamental group. group theory topology group Γ, a topological space X with π 1 (X) = Γ. Γ acts on the universal cover
is holomorphic. In other words, a holomorphic function is a collection of compatible holomorphic functions on all charts.
 RIEMANN SURFACES 2. Week 2. Basic definitions 2.1. Smooth manifolds. Complex manifolds. Let X be a topological space. A (real) chart of X is a pair (U, f : U R n ) where U is an open subset of X and f
RIEMANN SURFACES 2. Week 2. Basic definitions 2.1. Smooth manifolds. Complex manifolds. Let X be a topological space. A (real) chart of X is a pair (U, f : U R n ) where U is an open subset of X and f
CALCULUS ON MANIFOLDS. 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M =
 CALCULUS ON MANIFOLDS 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M = a M T am, called the tangent bundle, is itself a smooth manifold, dim T M = 2n. Example 1.
CALCULUS ON MANIFOLDS 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M = a M T am, called the tangent bundle, is itself a smooth manifold, dim T M = 2n. Example 1.
Mostow Rigidity. W. Dison June 17, (a) semi-simple Lie groups with trivial centre and no compact factors and
 semi-simple Lie groups with trivial centre and no compact factors and") Mostow Rigidity W. Dison June 17, 2005 0 Introduction Lie Groups and Symmetric Spaces We will be concerned with (a) semi-simple Lie groups with trivial centre and no compact factors and (b) simply connected,
Mostow Rigidity W. Dison June 17, 2005 0 Introduction Lie Groups and Symmetric Spaces We will be concerned with (a) semi-simple Lie groups with trivial centre and no compact factors and (b) simply connected,
Introduction 3. Lecture 1. Hyperbolic Surfaces 5. Lecture 2. Quasiconformal Maps 19
 Contents Teichmüller Theory Ursula Hamenstädt 1 Teichmüller Theory 3 Introduction 3 Lecture 1. Hyperbolic Surfaces 5 Lecture 2. Quasiconformal Maps 19 Lecture 3. Complex Structures, Jacobians and the Weil
Contents Teichmüller Theory Ursula Hamenstädt 1 Teichmüller Theory 3 Introduction 3 Lecture 1. Hyperbolic Surfaces 5 Lecture 2. Quasiconformal Maps 19 Lecture 3. Complex Structures, Jacobians and the Weil
What is a (compact) Riemann surface?
 Riemann surface?") What is a (compact) Riemann surface? Irwin Kra SUNY @ Stony Brook irwinkra@gmail.com Wednesday, March 5, 2014 Math CLUB talk. To help you make a decision about topics to study (in graduate school)? Irwin
What is a (compact) Riemann surface? Irwin Kra SUNY @ Stony Brook irwinkra@gmail.com Wednesday, March 5, 2014 Math CLUB talk. To help you make a decision about topics to study (in graduate school)? Irwin
Riemann Surfaces and Algebraic Curves
 Riemann Surfaces and Algebraic Curves JWR Tuesday December 11, 2001, 9:03 AM We describe the relation between algebraic curves and Riemann surfaces. An elementary reference for this material is [1]. 1
Riemann Surfaces and Algebraic Curves JWR Tuesday December 11, 2001, 9:03 AM We describe the relation between algebraic curves and Riemann surfaces. An elementary reference for this material is [1]. 1
THE COHOMOLOGY OF THE MODULI SPACE OF CURVES
 THE COHOMOLOGY OF THE MODULI SPACE OF CURVES The purpose of this unit is to give a brief survey about the cohomology and the tautological rings of the moduli space of curves. Unfortunately, for the most
THE COHOMOLOGY OF THE MODULI SPACE OF CURVES The purpose of this unit is to give a brief survey about the cohomology and the tautological rings of the moduli space of curves. Unfortunately, for the most
An introduction to orbifolds
 An introduction to orbifolds Joan Porti UAB Subdivide and Tile: Triangulating spaces for understanding the world Lorentz Center November 009 An introduction to orbifolds p.1/0 Motivation Γ < Isom(R n )
An introduction to orbifolds Joan Porti UAB Subdivide and Tile: Triangulating spaces for understanding the world Lorentz Center November 009 An introduction to orbifolds p.1/0 Motivation Γ < Isom(R n )
Foliations of hyperbolic space by constant mean curvature surfaces sharing ideal boundary
 Foliations of hyperbolic space by constant mean curvature surfaces sharing ideal boundary David Chopp and John A. Velling December 1, 2003 Abstract Let γ be a Jordan curve in S 2, considered as the ideal
Foliations of hyperbolic space by constant mean curvature surfaces sharing ideal boundary David Chopp and John A. Velling December 1, 2003 Abstract Let γ be a Jordan curve in S 2, considered as the ideal
ON INFINITESIMAL STREBEL POINTS
 ON ININITSIMAL STRBL POINTS ALASTAIR LTCHR Abstract. In this paper, we prove that if is a Riemann surface of infinite analytic type and [µ] T is any element of Teichmüller space, then there exists µ 1
ON ININITSIMAL STRBL POINTS ALASTAIR LTCHR Abstract. In this paper, we prove that if is a Riemann surface of infinite analytic type and [µ] T is any element of Teichmüller space, then there exists µ 1
Möbius transformations Möbius transformations are simply the degree one rational maps of C: cz + d : C C. ad bc 0. a b. A = c d
 Möbius transformations Möbius transformations are simply the degree one rational maps of C: where and Then σ A : z az + b cz + d : C C ad bc 0 ( ) a b A = c d A σ A : GL(2C) {Mobius transformations } is
Möbius transformations Möbius transformations are simply the degree one rational maps of C: where and Then σ A : z az + b cz + d : C C ad bc 0 ( ) a b A = c d A σ A : GL(2C) {Mobius transformations } is
Lecture 2. Smooth functions and maps
 Lecture 2. Smooth functions and maps 2.1 Definition of smooth maps Given a differentiable manifold, all questions of differentiability are to be reduced to questions about functions between Euclidean spaces,
Lecture 2. Smooth functions and maps 2.1 Definition of smooth maps Given a differentiable manifold, all questions of differentiability are to be reduced to questions about functions between Euclidean spaces,
Plane hyperbolic geometry
 2 Plane hyperbolic geometry In this chapter we will see that the unit disc D has a natural geometry, known as plane hyperbolic geometry or plane Lobachevski geometry. It is the local model for the hyperbolic
2 Plane hyperbolic geometry In this chapter we will see that the unit disc D has a natural geometry, known as plane hyperbolic geometry or plane Lobachevski geometry. It is the local model for the hyperbolic
The Skinning Map. 1 Motivation
 The Skinning Map The skinning map σ is a particular self-map of the Teichmüller space T (Σ). It arises in the theory of geometrization of 3-manifolds. Let us start by understanding the geometrization of
The Skinning Map The skinning map σ is a particular self-map of the Teichmüller space T (Σ). It arises in the theory of geometrization of 3-manifolds. Let us start by understanding the geometrization of
Complete Surfaces of Constant Gaussian Curvature in Euclidean Space R 3.
 Summary of the Thesis in Mathematics by Valentina Monaco Complete Surfaces of Constant Gaussian Curvature in Euclidean Space R 3. Thesis Supervisor Prof. Massimiliano Pontecorvo 19 May, 2011 SUMMARY The
Summary of the Thesis in Mathematics by Valentina Monaco Complete Surfaces of Constant Gaussian Curvature in Euclidean Space R 3. Thesis Supervisor Prof. Massimiliano Pontecorvo 19 May, 2011 SUMMARY The
A crash course the geometry of hyperbolic surfaces
 Lecture 7 A crash course the geometry of hyperbolic surfaces 7.1 The hyperbolic plane Hyperbolic geometry originally developed in the early 19 th century to prove that the parallel postulate in Euclidean
Lecture 7 A crash course the geometry of hyperbolic surfaces 7.1 The hyperbolic plane Hyperbolic geometry originally developed in the early 19 th century to prove that the parallel postulate in Euclidean
Intrinsic Geometry. Andrejs Treibergs. Friday, March 7, 2008
 Early Research Directions: Geometric Analysis II Intrinsic Geometry Andrejs Treibergs University of Utah Friday, March 7, 2008 2. References Part of a series of thee lectures on geometric analysis. 1 Curvature
Early Research Directions: Geometric Analysis II Intrinsic Geometry Andrejs Treibergs University of Utah Friday, March 7, 2008 2. References Part of a series of thee lectures on geometric analysis. 1 Curvature
Eigenvalue (mis)behavior on manifolds
behavior on manifolds") Bucknell University Lehigh University October 20, 2010 Outline 1 Isoperimetric inequalities 2 3 4 A little history Rayleigh quotients The Original Isoperimetric Inequality The Problem of Queen Dido: maximize
Bucknell University Lehigh University October 20, 2010 Outline 1 Isoperimetric inequalities 2 3 4 A little history Rayleigh quotients The Original Isoperimetric Inequality The Problem of Queen Dido: maximize
How curvature shapes space
 How curvature shapes space Richard Schoen University of California, Irvine - Hopf Lecture, ETH, Zürich - October 30, 2017 The lecture will have three parts: Part 1: Heinz Hopf and Riemannian geometry Part
How curvature shapes space Richard Schoen University of California, Irvine - Hopf Lecture, ETH, Zürich - October 30, 2017 The lecture will have three parts: Part 1: Heinz Hopf and Riemannian geometry Part
Uniformization and percolation
 Uniformization and percolation Itai Benjamini October 2015 Conformal maps A conformal map, between planar domains, is a function that infinitesimally preserves angles. The derivative of a conformal map
Uniformization and percolation Itai Benjamini October 2015 Conformal maps A conformal map, between planar domains, is a function that infinitesimally preserves angles. The derivative of a conformal map
Minimal submanifolds: old and new
 Minimal submanifolds: old and new Richard Schoen Stanford University - Chen-Jung Hsu Lecture 1, Academia Sinica, ROC - December 2, 2013 Plan of Lecture Part 1: Volume, mean curvature, and minimal submanifolds
Minimal submanifolds: old and new Richard Schoen Stanford University - Chen-Jung Hsu Lecture 1, Academia Sinica, ROC - December 2, 2013 Plan of Lecture Part 1: Volume, mean curvature, and minimal submanifolds
Geometric inequalities for black holes
 Geometric inequalities for black holes Sergio Dain FaMAF-Universidad Nacional de Córdoba, CONICET, Argentina. 3 August, 2012 Einstein equations (vacuum) The spacetime is a four dimensional manifold M with
Geometric inequalities for black holes Sergio Dain FaMAF-Universidad Nacional de Córdoba, CONICET, Argentina. 3 August, 2012 Einstein equations (vacuum) The spacetime is a four dimensional manifold M with
Quasi-conformal minimal Lagrangian diffeomorphisms of the
 Quasi-conformal minimal Lagrangian diffeomorphisms of the hyperbolic plane (joint work with J.M. Schlenker) January 21, 2010 Quasi-symmetric homeomorphism of a circle A homeomorphism φ : S 1 S 1 is quasi-symmetric
Quasi-conformal minimal Lagrangian diffeomorphisms of the hyperbolic plane (joint work with J.M. Schlenker) January 21, 2010 Quasi-symmetric homeomorphism of a circle A homeomorphism φ : S 1 S 1 is quasi-symmetric
Perelman s proof of the Poincaré conjecture
 University of California, Los Angeles Clay/Mahler Lecture Series In a series of three papers in 2002-2003, Grisha Perelman solved the famous Poincaré conjecture: Poincaré conjecture (1904) Every smooth,
University of California, Los Angeles Clay/Mahler Lecture Series In a series of three papers in 2002-2003, Grisha Perelman solved the famous Poincaré conjecture: Poincaré conjecture (1904) Every smooth,
Introduction. Hamilton s Ricci flow and its early success
 Introduction In this book we compare the linear heat equation on a static manifold with the Ricci flow which is a nonlinear heat equation for a Riemannian metric g(t) on M and with the heat equation on
Introduction In this book we compare the linear heat equation on a static manifold with the Ricci flow which is a nonlinear heat equation for a Riemannian metric g(t) on M and with the heat equation on
MATH DIFFERENTIAL GEOMETRY. Contents
 MATH 3968 - DIFFERENTIAL GEOMETRY ANDREW TULLOCH Contents 1. Curves in R N 2 2. General Analysis 2 3. Surfaces in R 3 3 3.1. The Gauss Bonnet Theorem 8 4. Abstract Manifolds 9 1 MATH 3968 - DIFFERENTIAL
MATH 3968 - DIFFERENTIAL GEOMETRY ANDREW TULLOCH Contents 1. Curves in R N 2 2. General Analysis 2 3. Surfaces in R 3 3 3.1. The Gauss Bonnet Theorem 8 4. Abstract Manifolds 9 1 MATH 3968 - DIFFERENTIAL
HILBERT S THEOREM ON THE HYPERBOLIC PLANE
 HILBET S THEOEM ON THE HYPEBOLIC PLANE MATTHEW D. BOWN Abstract. We recount a proof of Hilbert s result that a complete geometric surface of constant negative Gaussian curvature cannot be isometrically
HILBET S THEOEM ON THE HYPEBOLIC PLANE MATTHEW D. BOWN Abstract. We recount a proof of Hilbert s result that a complete geometric surface of constant negative Gaussian curvature cannot be isometrically
IV. Conformal Maps. 1. Geometric interpretation of differentiability. 2. Automorphisms of the Riemann sphere: Möbius transformations
 MTH6111 Complex Analysis 2009-10 Lecture Notes c Shaun Bullett 2009 IV. Conformal Maps 1. Geometric interpretation of differentiability We saw from the definition of complex differentiability that if f
MTH6111 Complex Analysis 2009-10 Lecture Notes c Shaun Bullett 2009 IV. Conformal Maps 1. Geometric interpretation of differentiability We saw from the definition of complex differentiability that if f
Riemann surfaces. Paul Hacking and Giancarlo Urzua 1/28/10
 Riemann surfaces Paul Hacking and Giancarlo Urzua 1/28/10 A Riemann surface (or smooth complex curve) is a complex manifold of dimension one. We will restrict to compact Riemann surfaces. It is a theorem
Riemann surfaces Paul Hacking and Giancarlo Urzua 1/28/10 A Riemann surface (or smooth complex curve) is a complex manifold of dimension one. We will restrict to compact Riemann surfaces. It is a theorem
DIFFERENTIAL GEOMETRY HW 5. Show that the law of cosines in spherical geometry is. cos c = cos a cos b + sin a sin b cos θ.
 DIFFEENTIAL GEOMETY HW 5 CLAY SHONKWILE Show that the law of cosines in spherical geometry is 5 cos c cos a cos b + sin a sin b cos θ. Proof. Consider the spherical triangle depicted below: Form radii
DIFFEENTIAL GEOMETY HW 5 CLAY SHONKWILE Show that the law of cosines in spherical geometry is 5 cos c cos a cos b + sin a sin b cos θ. Proof. Consider the spherical triangle depicted below: Form radii
Geometry of the Moduli Space of Curves and Algebraic Manifolds
 Geometry of the Moduli Space of Curves and Algebraic Manifolds Shing-Tung Yau Harvard University 60th Anniversary of the Institute of Mathematics Polish Academy of Sciences April 4, 2009 The first part
Geometry of the Moduli Space of Curves and Algebraic Manifolds Shing-Tung Yau Harvard University 60th Anniversary of the Institute of Mathematics Polish Academy of Sciences April 4, 2009 The first part
COMPLEX ANALYSIS-II HOMEWORK
 COMPLEX ANALYSIS-II HOMEWORK M. LYUBICH Homework (due by Thu Sep 7). Cross-ratios and symmetries of the four-punctured spheres The cross-ratio of four distinct (ordered) points (z,z 2,z 3,z 4 ) Ĉ4 on the
COMPLEX ANALYSIS-II HOMEWORK M. LYUBICH Homework (due by Thu Sep 7). Cross-ratios and symmetries of the four-punctured spheres The cross-ratio of four distinct (ordered) points (z,z 2,z 3,z 4 ) Ĉ4 on the
Estimates in surfaces with positive constant Gauss curvature
 Estimates in surfaces with positive constant Gauss curvature J. A. Gálvez A. Martínez Abstract We give optimal bounds of the height, curvature, area and enclosed volume of K-surfaces in R 3 bounding a
Estimates in surfaces with positive constant Gauss curvature J. A. Gálvez A. Martínez Abstract We give optimal bounds of the height, curvature, area and enclosed volume of K-surfaces in R 3 bounding a
Algebraic Curves and Riemann Surfaces
 Algebraic Curves and Riemann Surfaces Rick Miranda Graduate Studies in Mathematics Volume 5 If American Mathematical Society Contents Preface xix Chapter I. Riemann Surfaces: Basic Definitions 1 1. Complex
Algebraic Curves and Riemann Surfaces Rick Miranda Graduate Studies in Mathematics Volume 5 If American Mathematical Society Contents Preface xix Chapter I. Riemann Surfaces: Basic Definitions 1 1. Complex
THE FUNDAMENTAL GROUP OF THE DOUBLE OF THE FIGURE-EIGHT KNOT EXTERIOR IS GFERF
 THE FUNDAMENTAL GROUP OF THE DOUBLE OF THE FIGURE-EIGHT KNOT EXTERIOR IS GFERF D. D. LONG and A. W. REID Abstract We prove that the fundamental group of the double of the figure-eight knot exterior admits
THE FUNDAMENTAL GROUP OF THE DOUBLE OF THE FIGURE-EIGHT KNOT EXTERIOR IS GFERF D. D. LONG and A. W. REID Abstract We prove that the fundamental group of the double of the figure-eight knot exterior admits
Riemann surfaces. 3.1 Definitions
 3 Riemann surfaces In this chapter we define and give the first properties of Riemann surfaces. These are the holomorphic counterpart of the (real) differential manifolds. We will see how the Fuchsian
3 Riemann surfaces In this chapter we define and give the first properties of Riemann surfaces. These are the holomorphic counterpart of the (real) differential manifolds. We will see how the Fuchsian
Junior Seminar: Hyperbolic Geometry Lecture Notes
 Junior Seminar: Hyperbolic Geometry Lecture Notes Tim Campion January 20, 2010 1 Motivation Our first construction is very similar in spirit to an analogous one in Euclidean space. The group of isometries
Junior Seminar: Hyperbolic Geometry Lecture Notes Tim Campion January 20, 2010 1 Motivation Our first construction is very similar in spirit to an analogous one in Euclidean space. The group of isometries
Mapping problems and harmonic univalent mappings
 Mapping problems and harmonic univalent mappings Antti Rasila Helsinki University of Technology antti.rasila@tkk.fi (Mainly based on P. Duren s book Harmonic mappings in the plane) Helsinki Analysis Seminar,
Mapping problems and harmonic univalent mappings Antti Rasila Helsinki University of Technology antti.rasila@tkk.fi (Mainly based on P. Duren s book Harmonic mappings in the plane) Helsinki Analysis Seminar,
CHARACTERIZATIONS OF CIRCLE PATTERNS AND CONVEX POLYHEDRA IN HYPERBOLIC 3-SPACE
 CHARACTERIZATIONS OF CIRCLE PATTERNS AND CONVEX POLYHEDRA IN HYPERBOLIC 3-SPACE XIAOJUN HUANG AND JINSONG LIU ABSTRACT In this paper we consider the characterization problem of convex polyhedrons in the
CHARACTERIZATIONS OF CIRCLE PATTERNS AND CONVEX POLYHEDRA IN HYPERBOLIC 3-SPACE XIAOJUN HUANG AND JINSONG LIU ABSTRACT In this paper we consider the characterization problem of convex polyhedrons in the
Stein fillings of contact 3-manifolds obtained as Legendrian sur
 Stein fillings of contact 3-manifolds obtained as Legendrian surgeries Youlin Li (With Amey Kaloti) Shanghai Jiao Tong University A Satellite Conference of Seoul ICM 2014 Knots and Low Dimensional Manifolds
Stein fillings of contact 3-manifolds obtained as Legendrian surgeries Youlin Li (With Amey Kaloti) Shanghai Jiao Tong University A Satellite Conference of Seoul ICM 2014 Knots and Low Dimensional Manifolds
arxiv: v1 [math.dg] 28 Jun 2008
![arxiv: v1 [math.dg] 28 Jun 2008](/thumbs/90/101198950.jpg "arxiv: v1 [math.dg] 28 Jun 2008") Limit Surfaces of Riemann Examples David Hoffman, Wayne Rossman arxiv:0806.467v [math.dg] 28 Jun 2008 Introduction The only connected minimal surfaces foliated by circles and lines are domains on one of
Limit Surfaces of Riemann Examples David Hoffman, Wayne Rossman arxiv:0806.467v [math.dg] 28 Jun 2008 Introduction The only connected minimal surfaces foliated by circles and lines are domains on one of
X G X by the rule x x g
 18. Maps between Riemann surfaces: II Note that there is one further way we can reverse all of this. Suppose that X instead of Y is a Riemann surface. Can we put a Riemann surface structure on Y such that
18. Maps between Riemann surfaces: II Note that there is one further way we can reverse all of this. Suppose that X instead of Y is a Riemann surface. Can we put a Riemann surface structure on Y such that
Lecture 1. Introduction
 Lecture 1. Introduction In Differential Geometry we study spaces which are smooth enough to do calculus. These include such familiar objects as curves and surfaces in space. In its earliest manifestation,
Lecture 1. Introduction In Differential Geometry we study spaces which are smooth enough to do calculus. These include such familiar objects as curves and surfaces in space. In its earliest manifestation,
CONSIDERATION OF COMPACT MINIMAL SURFACES IN 4-DIMENSIONAL FLAT TORI IN TERMS OF DEGENERATE GAUSS MAP
 CONSIDERATION OF COMPACT MINIMAL SURFACES IN 4-DIMENSIONAL FLAT TORI IN TERMS OF DEGENERATE GAUSS MAP TOSHIHIRO SHODA Abstract. In this paper, we study a compact minimal surface in a 4-dimensional flat
CONSIDERATION OF COMPACT MINIMAL SURFACES IN 4-DIMENSIONAL FLAT TORI IN TERMS OF DEGENERATE GAUSS MAP TOSHIHIRO SHODA Abstract. In this paper, we study a compact minimal surface in a 4-dimensional flat
LECTURE Itineraries We start with a simple example of a dynamical system obtained by iterating the quadratic polynomial
 LECTURE. Itineraries We start with a simple example of a dynamical system obtained by iterating the quadratic polynomial f λ : R R x λx( x), where λ [, 4). Starting with the critical point x 0 := /2, we
LECTURE. Itineraries We start with a simple example of a dynamical system obtained by iterating the quadratic polynomial f λ : R R x λx( x), where λ [, 4). Starting with the critical point x 0 := /2, we
DIFFERENTIAL GEOMETRY. LECTURE 12-13,
 DIFFERENTIAL GEOMETRY. LECTURE 12-13, 3.07.08 5. Riemannian metrics. Examples. Connections 5.1. Length of a curve. Let γ : [a, b] R n be a parametried curve. Its length can be calculated as the limit of
DIFFERENTIAL GEOMETRY. LECTURE 12-13, 3.07.08 5. Riemannian metrics. Examples. Connections 5.1. Length of a curve. Let γ : [a, b] R n be a parametried curve. Its length can be calculated as the limit of
ABELIAN COVERINGS, POINCARÉ EXPONENT OF CONVERGENCE AND HOLOMORPHIC DEFORMATIONS
 Annales Academiæ Scientiarum Fennicæ Series A. I. Mathematica Volumen 20, 1995, 81 86 ABELIAN COVERINGS, POINCARÉ EXPONENT OF CONVERGENCE AND HOLOMORPHIC DEFORMATIONS K. Astala and M. Zinsmeister University
Annales Academiæ Scientiarum Fennicæ Series A. I. Mathematica Volumen 20, 1995, 81 86 ABELIAN COVERINGS, POINCARÉ EXPONENT OF CONVERGENCE AND HOLOMORPHIC DEFORMATIONS K. Astala and M. Zinsmeister University
Let X be a topological space. We want it to look locally like C. So we make the following definition.
 February 17, 2010 1 Riemann surfaces 1.1 Definitions and examples Let X be a topological space. We want it to look locally like C. So we make the following definition. Definition 1. A complex chart on
February 17, 2010 1 Riemann surfaces 1.1 Definitions and examples Let X be a topological space. We want it to look locally like C. So we make the following definition. Definition 1. A complex chart on
Surface Registration by Optimization in Constrained Diffeomorphism Space
 Surface Registration by Optimization in Constrained Diffeomorphism Space Wei Zeng Florida International University, Florida wzeng@cs.fiu.edu Lok Ming Lui Chinese University of Hong Kong, Hong Kong Xianfeng
Surface Registration by Optimization in Constrained Diffeomorphism Space Wei Zeng Florida International University, Florida wzeng@cs.fiu.edu Lok Ming Lui Chinese University of Hong Kong, Hong Kong Xianfeng
Uniformization and percolation
 Uniformization and percolation Itai Benjamini May 2016 Conformal maps A conformal map, between planar domains, is a function that infinitesimally preserves angles. The derivative of a conformal map is
Uniformization and percolation Itai Benjamini May 2016 Conformal maps A conformal map, between planar domains, is a function that infinitesimally preserves angles. The derivative of a conformal map is
Discrete Differential Geometry. Discrete Laplace-Beltrami operator and discrete conformal mappings.
 Discrete differential geometry. Discrete Laplace-Beltrami operator and discrete conformal mappings. Technische Universität Berlin Geometric Methods in Classical and Quantum Lattice Systems, Caputh, September
Discrete differential geometry. Discrete Laplace-Beltrami operator and discrete conformal mappings. Technische Universität Berlin Geometric Methods in Classical and Quantum Lattice Systems, Caputh, September
An introduction to arithmetic groups. Lizhen Ji CMS, Zhejiang University Hangzhou , China & Dept of Math, Univ of Michigan Ann Arbor, MI 48109
 An introduction to arithmetic groups Lizhen Ji CMS, Zhejiang University Hangzhou 310027, China & Dept of Math, Univ of Michigan Ann Arbor, MI 48109 June 27, 2006 Plan. 1. Examples of arithmetic groups
An introduction to arithmetic groups Lizhen Ji CMS, Zhejiang University Hangzhou 310027, China & Dept of Math, Univ of Michigan Ann Arbor, MI 48109 June 27, 2006 Plan. 1. Examples of arithmetic groups
Complex manifolds, Kahler metrics, differential and harmonic forms
 Complex manifolds, Kahler metrics, differential and harmonic forms Cattani June 16, 2010 1 Lecture 1 Definition 1.1 (Complex Manifold). A complex manifold is a manifold with coordinates holomorphic on
Complex manifolds, Kahler metrics, differential and harmonic forms Cattani June 16, 2010 1 Lecture 1 Definition 1.1 (Complex Manifold). A complex manifold is a manifold with coordinates holomorphic on
NON-DIVERGENT INFINITELY DISCRETE TEICHMÜLLER MODULAR TRANSFORMATION
 NON-DIVERGENT INFINITELY DISCRETE TEICHMÜLLER MODULAR TRANSFORMATION EGE FUJIKAWA AND KATSUHIKO MATSUZAKI Abstract. We consider a classification of Teichmüller modular transformations of an analytically
NON-DIVERGENT INFINITELY DISCRETE TEICHMÜLLER MODULAR TRANSFORMATION EGE FUJIKAWA AND KATSUHIKO MATSUZAKI Abstract. We consider a classification of Teichmüller modular transformations of an analytically