Testing Safety-critical Discrete- State Systems Mathematical Foundations and Concrete Algorithms
|
|
|
- Allyson Burke
- 6 years ago
- Views:
Transcription
1 Testing Safety-critical Discrete- State Systems Mathematical Foundations and Concrete Algorithms Wen-ling Huang and Jan Peleska University of Bremen
2 Background My research group at the University of Bremen Specialised on verification of safety-critical control systems Focus on test automation Collaboration with Prof. Dr. habil. Wen-ling Huang in this field
3 Background Verified Systems International GmbH Founded 1998 as a spinoff company from the University of Bremen Specialised on verification and validation of safety-critical systems aerospace, railways, automotive Tool development, hardware-in-the-loop test bench development, and service provision Main customers Airbus, Siemens 25 employees
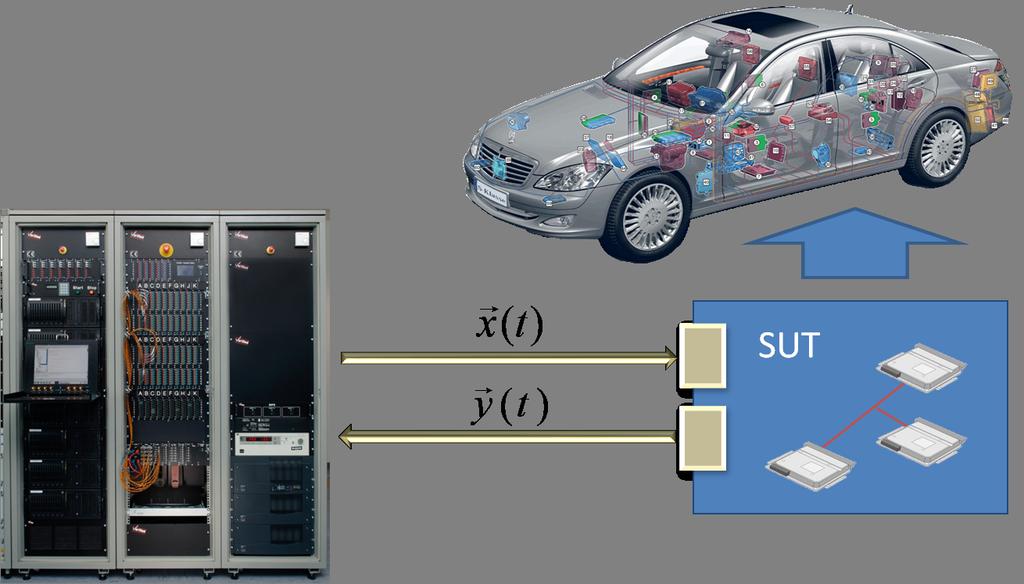

4 Hardware-in-the-Loop Test Benches For testing integrated HW/SW systems System Under Test
5 An Observation... Many maths and computer science students in their first semesters seem to think that complex theory and difficult algorithms are only needed to pass exams... This is not true! Many of the most important innovations and products are based on highly complex mathematical foundations and on sophisticated software algorithms
6 Safety-critical systems Examples
7 Safety-critical Systems A... safety-critical system is a system whose failure or malfunction may result in one (or more) of the following outcomes: death or serious injury to people loss or severe damage to equipment/property environmental harm Definition taken from
8
9 Safety-critical Systems Examples Airbag controller
10 Safety-critical Systems Examples Airbag Aircraft controller thrust reversal



11 Safety-critical Systems Examples Airbag Aircraft Train speed controller thrust reversal supervision
12 Verification Requirements of International Standards
13 Verification Requirements of International Standards Safety-critical systems development and verification is controlled by laws These laws state that development and verification must follow the rules specified in applicable standards, such as Avionic domain: RTCA DO-178C Railway domain: CENELEC EN50128:2011 Automotive domain: ISO 26262

14 Verification Requirements of International Standards Safety-critical systems development and verification is controlled by laws These Avionic laws state System. that development A control and verification must follow computer the rules in an specified aircraftin applicable standards, such as Avionic domain: RTCA DO-178C Railway domain: CENELEC EN50128:2011 Automotive domain: ISO 26262
15 Verification Requirements of International Standards These standards differ in many details, but they contain some basic requirements Development must be based on requirements Every piece of software code and every hardware component must be traced back to at least one requirement
16 For the most critical applications, requirements should be expressed by formal models with mathematical interpretation Syntax and static model semantics: is the model well-formed? Behavioural model semantics: how does the model state, including inputs and outputs, change over time? Requirements (models) must be verified
17 Code must be verified Does it implement the related requirements correctly? Verification is preferably performed by testing the software integrated in the controller s hardware Verification results need to be checked with respect to completeness and correctness Tools automating development or verification steps need to be qualified
18 Motivation Safety-critical systems can be developed by starting with a model of the required system behaviour The developed system can then be tested against the model Input data to be exercised on the system under test (SUT) can be derived from the model The behaviour of the SUT can be compared to the expected behaviour specified in the model #.E9.81.8B.E8.BC.B8
19 Motivation Testing theories Define methods to generate test cases from models Test case. Sequence of input data + expected outputs to produced by the SUT when receiving these inputs Specify which correctness properties are fulfilled if all test cases are passed by the SUT For safety-critical systems, the test strength (= the capability to uncover certain types of errors) of a testing theory must be proven


20 Example: Model of a brake controller in a train Controller receives commands to activate brakes From train engine driver: man_on, man_off From a speed supervision computer: auto_on, auto_off Controller activates brakes by outputs trigger and release man_on, auto_on man_off, auto_off trigger release
21 Requirements for the brake controller 1. When brakes are not activated, they can be triggered manually (man_on) or by the speed supervision computer (auto_on) 2. When brakes have been activated manually (man_on), they can only be released manually (man_off) 3. When brakes have been activated via speed supervision computer (auto_on), they can be only released via command auto_off from the computer 4. When the supervision computer sends auto_on while already braking, the brakes can only be released by auto_off
22 Finite State Machine modelling the behaviour of the brake controller RELEASED auto_off,man_off/release man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger TRIGGERED_AUTO man_off,man_on,auto_on/trigger
23 Finite State Machine modelling the behaviour of the brake controller RELEASED auto_off,man_off/release TRIGGERED man_on/trigger man_off/release Which test cases should we derive from the model? auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger TRIGGERED_AUTO man_off,man_on,auto_on/trigger
24 Finite State Machine modelling the behaviour of the brake controller RELEASED auto_off,man_off/release TRIGGERED man_on/trigger man_off/release Which test cases should we derive from the model? auto_off, man_on/trigger auto_on/trigger auto_off/release Which correctness conditions can be guaranteed if auto_on/trigger all test cases are passed by the SUT? TRIGGERED_AUTO man_off,man_on,auto_on/trigger
25 Overview Mathematical definition of Finite State Machines Languages and Conformance Relations FSM properties: observability and minimality Fault Models Testing Theories The W-Method for deterministic FSMs The Wp-Method for nondeterministic FSMs
26 Finite State Machines M =(Q, q 0,I,O,h) Q 6=?: finite set of states q 0 2 Q: initial state I 6=?: finite set of input alphabet O 6=?: finite set of output alphabet h Q I O Q: transition relation
27 Finite State Machine modelling the behaviour of the brake controller RELEASED auto_off,man_off/release man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger TRIGGERED_AUTO man_off,man_on,auto_on/trigger
28 Finite State Machine modelling the behaviour of the brake controller q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger TRIGGERED_AUTO man_off,man_on,auto_on/trigger
29 Finite State Machine modelling the behaviour of the brake controller q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release q 1 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger TRIGGERED_AUTO man_off,man_on,auto_on/trigger
30 Finite State Machine modelling the behaviour of the brake controller q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release q 1 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
31 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release q 1 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
32 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } Input Alphabet q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release q 1 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
33 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } Input Alphabet q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release q 1 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
34 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } Input Alphabet q 0 RELEASED auto_off,man_off/release man_on, auto_on q 1 man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
35 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } Input Alphabet q 0 RELEASED auto_off,man_off/release man_on, auto_on man_off, auto_off q 1 man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
36 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } Input Alphabet q 0 RELEASED auto_off,man_off/release man_on, auto_on man_off, auto_off q 1 man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger Output Alphabet q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
37 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } Input Alphabet q 0 RELEASED auto_off,man_off/release man_on, auto_on man_off, auto_off q 1 man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger Output Alphabet q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
38 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } Input Alphabet q 0 RELEASED auto_off,man_off/release man_on, auto_on man_off, auto_off q 1 man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger Output Alphabet trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
39 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } Input Alphabet q 0 RELEASED auto_off,man_off/release man_on, auto_on man_off, auto_off q 1 man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger Output Alphabet trigger release q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
40 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } Input Alphabet q 0 RELEASED auto_off,man_off/release man_on, auto_on man_off, auto_off q 1 man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger Output Alphabet trigger release Transition Relation q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
41 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } Input Alphabet q 0 RELEASED auto_off,man_off/release man_on, auto_on man_off, auto_off q 1 man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger Output Alphabet trigger release Transition Relation q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
42 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } Input Alphabet q 0 RELEASED auto_off,man_off/release man_on, auto_on man_off, auto_off q 1 man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger Output Alphabet trigger release Transition Relation (q 0, auto on, trigger,q 2 ),... q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
43 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } Input Alphabet q 0 RELEASED auto_off,man_off/release man_on, auto_on man_off, auto_off q 1 man_on/trigger man_off/release TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger Output Alphabet trigger release Transition Relation (q 0, auto on, trigger,q 2 ),... q 0 auto on/trigger! q 2 q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
44 Language := I O alphabet := S { k2n k L language over :, i 2, 8i =1,...,k} " 2 L L is prefix-closed
45 Language := I O alphabet := S { k2n k L language over :, i 2, 8i =1,...,k} " 2 L L is prefix-closed 8 = 1... k 2 L : 1... i 2 L, 8i apple k
46 Finite State Machine modelling the behaviour of the brake controller q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release q 1 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
47 q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release q 1 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
48 q 0 auto on/trigger! q 2 auto o /release! q 0 q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release q 1 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
49 q 0 auto on/trigger! q 2 auto o /release! q 0 (auto on, trigger).(auto o, release) 2 L(q 0 ) q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release q 1 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/trigger
50 Language of FSM M =(Q, q 0,I,O,h) L(q) :={ 2 9q 0 2 Q, q! q 0 } language of q q q 0 :, L(q) =L(q 0 ) qq 0 are equivalent L(M) :=L(q 0 ) language of M
51 Conformance Relations M =(Q, q 0,I,O,h), M 0 =(Q 0,q 0 0,I,O,h 0 )twofsm. M and M 0 are I/O equivalent : L(M 0 )=L(M) M 0 is an I/O reduction of M : L(M 0 ) L(M)
52 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0
53 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0
54 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 q
55 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 q x1
56 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 q x1
57 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 q x1 x2
58 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 q x1 x2
59 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 x1 q x2
60 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 q x1 x2 xn
61 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 q x1 x2 xn
62 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 M is deterministic : 8q x/y 1! q 1,q x/y 2! q 2 2 h ) y 1 = y 2 ^ q 1 = q 2
63 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 M is deterministic : 8q x/y 1! q 1,q x/y 2! q 2 2 h ) y 1 = y 2 ^ q 1 = q 2
64 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 M is deterministic : 8q x/y 1! q 1,q x/y 2! q 2 2 h ) y 1 = y 2 ^ q 1 = q 2 q
65 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 M is deterministic : 8q x/y 1! q 1,q x/y 2! q 2 2 h ) y 1 = y 2 ^ q 1 = q 2 q
66 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 M is deterministic : 8q x/y 1! q 1,q x/y 2! q 2 2 h ) y 1 = y 2 ^ q 1 = q 2 q
67 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 M is deterministic : 8q x/y 1! q 1,q x/y 2! q 2 2 h ) y 1 = y 2 ^ q 1 = q 2 x/y1 q
68 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 M is deterministic : 8q x/y 1! q 1,q x/y 2! q 2 2 h ) y 1 = y 2 ^ q 1 = q 2 x/y1 q
69 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 M is deterministic : 8q x/y 1! q 1,q x/y 2! q 2 2 h ) y 1 = y 2 ^ q 1 = q 2 x/y1 q q1
70 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 M is deterministic : 8q x/y 1! q 1,q x/y 2! q 2 2 h ) y 1 = y 2 ^ q 1 = q 2 q x/y1 x/y2 q1
71 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 M is deterministic : 8q x/y 1! q 1,q x/y 2! q 2 2 h ) y 1 = y 2 ^ q 1 = q 2 q x/y1 x/y2 q1
72 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 M is deterministic : 8q x/y 1! q 1,q x/y 2! q 2 2 h ) y 1 = y 2 ^ q 1 = q 2 q x/y1 q1 x/y2 q2
73 FSM Properties M =(Q, q 0,I,O,h) M is input-complete : 8q 2 Q ^ x 2 I,9y 2 O ^ q 0 2 Q : q x/y! q 0 M is deterministic : 8q x/y 1! q 1,q x/y 2! q 2 2 h ) y 1 = y 2 ^ q 1 = q 2 q x/y1=x/y2 q1 =q2
74 FSM Properties M is observable, if 8q x/y! q 1,q x/y! q 2 2 h ) q 1 = q 2
75 FSM Properties M is observable, if 8q x/y! q 1,q x/y! q 2 2 h ) q 1 = q 2 M is deterministic ) M is observable
76 FSM Properties M is observable, if 8q x/y! q 1,q x/y! q 2 2 h ) q 1 = q 2 M is deterministic ) M is observable
77 FSM Properties M is observable, if 8q x/y! q 1,q x/y! q 2 2 h ) q 1 = q 2 M is deterministic ) M is observable M is minimal, if 8q 2 Q, 9 2 L(q 0 ):q 0! q 8q 1 6= q 2 2 Q ) L(q 1 ) 6= L(q 2 )
78 FSM Properties M is observable, if 8q x/y! q 1,q x/y! q 2 2 h ) q 1 = q 2 M is deterministic ) M is observable M is minimal, if 8q 2 Q, 9 2 L(q 0 ):q 0! q initial connected 8q 1 6= q 2 2 Q ) L(q 1 ) 6= L(q 2 )
79 Signature Sig is a set of input-complete minimal observable finite state machines over = I O 8M over, 9M 0 2 Sig : L(M) =L(M 0 )
80 Finite State Machine modelling the behaviour of the brake controller Q = {q 0,q 1,q 2 } q 0 RELEASED auto_off,man_off/release Input Alphabet man_on, auto_on man_off, auto_off q 1 TRIGGERED man_on/trigger man_off/release auto_off, man_on/trigger auto_on/trigger auto_off/release q 0 deterministic input complete minimal auto o /release! q0 auto_on/trigger q 1 q 2 auto o /trigger! q1 auto o /release! q0 Output Alphabet trigger release q 2 TRIGGERED_AUTO q 0 q 2 man o /release! q0 man o /trigger! q2 man_off,man_on,auto_on/trigger
81 M =(Q, q 0,I,O,h),M 0 =(Q 0,q 0 0,I,O,h 0 ) 2 Sig L(M) =L(M 0 ), M,M 0 isomorphic 9f : M! M 0 : Q 7! Q 0 bijection q 0 7! q 0 0 I 7! I identity map O 7! O identity map q 1 x/y! q 2 2 h, f(q 1 ) x/y! f(q 2 ) 2 h 0
82 M =(Q, q 0,I,O,h),M 0 =(Q 0,q 0 0,I,O,h 0 ) 2 Sig L(M) =L(M 0 ), M,M 0 isomorphic 9f : M! M 0 : Q 7! Q 0 bijection q 0 7! q 0 0 I 7! I identity map O 7! O identity map q 1 x/y! q 2 2 h, f(q 1 ) x/y! f(q 2 ) 2 h 0
83 Fault Models F(M,I,O,apple, D) M 2 Sig, reference model apple Sig Sig, conformance relation (I/O equivalence or I/O reduction) D Sig, fault domain
84 Test Cases Test case of deterministic FSM: I/O sequence = x 1 /y 1...x k /y k 2 M passes, if 2 L(M 0 ) M fails, if 62 L(M 0 )
85 Test Suite test suite TS: a collection of test cases. M passes TS,if 8 2 TS, M passes. M fails TS,if 9 2 TS, M fails.
86 Complete Test Suites F(M,I,O,apple, D), fault model TS, testsuite Soundness: 8M 0 2D: M 0 apple M ) M 0 pass TS Exhaustiveness: 8M 0 2D: M 0 pass TS ) M 0 apple M Completeness: Soundness + Exhaustiveness 8M 0 2D: M 0 apple M, M 0 pass TS
87 Testing Theories Deterministic FSM: T-Method Product Automata W-Method, Wp-Method Nondeterministic FSM: W-Method, Wp-Method Adaptive Testing
88 Signature Sig is the set of input-complete minimal deterministic finite state machines over = I O
89 T-Method F(M,I,O,apple, D O ), fault model M =(Q, q 0,I,O,h), 8M 0 2 D O Sig: M 0 =(Q, q 0,I,O,h 0 ) 9f : h! h 0 bijective, x/y x/y 0 (q 1! q 2 ) 7! (q 1! q 2 )
90 State Cover State cover V of M =(Q, q 0,I,O,h) V L(M) " 2 V 8q 2 Q, 9 2 V : q 0! q. q 0 -after- = q
91 State Cover exists? finite? State cover V of M =(Q, q 0,I,O,h) V L(M) " 2 V 8q 2 Q, 9 2 V : q 0! q. q 0 -after- = q
92 Lemma Let M =(Q, q 0,I,O,h) 2 Sig and " 2 U L(M). Then U is a state cover of M or {q 0 -after-. 2 U ^ 2 ^. 2 L(M)} {q 0 -after- 2 U}.
93 Transition Cover Transition cover P of M =(Q, q 0,I,O,h) P L(M) " 2 P 8q 2 Q, = x/y 2 L(q), 9 2 P : q 0! q ^. 2 P
94 Transition Cover Transition cover P of M =(Q, q 0,I,O,h) P L(M) " 2 P 8q 2 Q, = x/y 2 L(q), 9 2 P : q 0! q ^. 2 P
95 Transition Cover Concatenation For any A, B 6=?. A.B := {. 2 A, 2 B} Example: = {a, b, c} A = {"},B = {a.b},c = {a, c} A.B = {".a.b} = {a.b} = B B.C = {a.b.a, a.b.c} Transition cover P of M =(Q, q 0,I,O,h) P L(M) " 2 P 8q 2 Q, = x/y 2 L(q), 9 2 P : q 0! q ^. 2 P
96 Transition Cover Concatenation For any A, B 6=?. A.B := {. 2 A, 2 B} Example: = {a, b, c} A = {"},B = {a.b},c = {a, c} A.B = {".a.b} = {a.b} = B B.C = {a.b.a, a.b.c} Transition cover P of M =(Q, q 0,I,O,h) P L(M) " 2 P 8q 2 Q, = x/y 2 L(q), 9 2 P : q 0! q ^. 2 P V is a state cover ) V ({"} [ ) = V.({"} [ ) \ L(M) = V [ {. 2 L(M) 2 V, 2 } is a transition cover
97 Transition Cover Concatenation For any A, B 6=?. A.B := {. 2 A, 2 B} Example: = {a, b, c} A = {"},B = {a.b},c = {a, c} A.B = {".a.b} = {a.b} = B B.C = {a.b.a, a.b.c} Transition cover P of M =(Q, q 0,I,O,h) P L(M) " 2 P 8q 2 Q, = x/y 2 L(q), 9 2 P : q 0! q ^. 2 P V is a state cover ) V ({"} [ ) = V.({"} [ ) \ L(M) M = V [ {. 2 L(M) 2 V, 2 } is a transition cover
98 Finite State Machine modelling the behaviour of the brake controller state cover V = {", man on/trigger, auto on/trigger} q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release q 1 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO transition cover P = V [ (V ) = {", man on/trigger, auto on/trigger, man o /release, auto o /release, man on/trigger.man on/trigger, man on/trigger.auto on/trigger, man on/trigger.man o /release, man on/trigger.auto o /trigger, auto on/trigger.man on/trigger, auto on/trigger.auto on/trigger, auto on/trigger.man o /trigger, auto on/trigger.auto o /release} man_off,man_on,auto_on/tr
99 Finite State Machine modelling the behaviour of the brake controller state cover V = {", man on/trigger, auto on/trigger} q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release q 1 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO transition cover P = V [ (V ) = {", man on/trigger, auto on/trigger, man o /release, auto o /release, man on/trigger.man on/trigger, man on/trigger.auto on/trigger, man on/trigger.man o /release, man on/trigger.auto o /trigger, auto on/trigger.man on/trigger, auto on/trigger.auto on/trigger, auto on/trigger.man o /trigger, auto on/trigger.auto o /release} man_off,man_on,auto_on/tr
100 T-Method Every TS = P transition cover of M is a complete test suite of F(M,I,O,, D O )
101 Proof: Suppose M 0,M are not I/O equivalent. Then there exists 2, 6= 0 2 such that. 2 L(M) and. 0 2 L(M 0 )with I = I 0. 0 Let q 0! q, q! q1 2 h, and q! q 1 2 h 0. Since TS is a transition cover, there is 2 TS such that q 0! q 2 h and. 2 TS. 0 Let q 0! q 2 h 0 with I = I 0. Then q 0 0! q 0! q 1 2 h 0 and q 0! q! q1 2 h. Since 0 I. 0 I = I. I and 0 O. 0 O 6= O. O, wehave. 62 L(M 0 ) Hence M 0 fails the test case. 2 TS.
102 W-Method M. P. Vasilevskii 1973 and Tsun S. Chow 1978 F(M,I,O,apple, D m ), fault model D m = {M 0 =(Q 0,q 0 0,I,O,h 0 ) 2 Sig Q 0 apple m}
103 Characterization Set Characterization set W of M =(Q, q 0,I,O,h) W is a set of I/O sequences 8q 1 6= q 2 2 Q, 9 1 6= 2 2 W : 1I = 2I ^ i 2 L(q i ),i=1, 2
104 Finite State Machine modelling the behaviour of the brake controller state cover V = {", man on/trigger, auto on/trigger} transition cover P = V [ V q 0 RELEASED auto_off,man_off/release man_on/trigger man_off/release q 1 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release auto_on/trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/
105 Finite State Machine modelling the behaviour of the brake controller state cover V = {", man on/trigger, auto on/trigger} transition cover P = V [ V q 0 RELEASED auto_off,man_off/release q 0 auto o /release! q0 man_on/trigger man_off/release q 1 auto o /trigger! q1 q 1 q 2 auto o /release! q0 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release q 0 man o /release! q0 q 2 man o /trigger! q2 auto_on/trigger q 2 TRIGGERED_AUTO man_off,man_on,auto_on/
106 Finite State Machine modelling the behaviour of the brake controller state cover V = {", man on/trigger, auto on/trigger} transition cover P = V [ V q 0 RELEASED auto_off,man_off/release q 0 auto o /release! q0 man_on/trigger man_off/release q 1 auto o /trigger! q1 q 1 q 2 auto o /release! q0 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release q 0 man o /release! q0 q 2 man o /trigger! q2 auto_on/trigger {man o /release, auto o /release } L(q 0 ) {man o /release, auto o /trigger } L(q 1 ) q 2 TRIGGERED_AUTO man_off,man_on,auto_on/ {man o /trigger, auto o /release } L(q 2 )
107 Finite State Machine modelling the behaviour of the brake controller state cover V = {", man on/trigger, auto on/trigger} transition cover P = V [ V q 0 RELEASED auto_off,man_off/release q 0 auto o /release! q0 man_on/trigger man_off/release q 1 auto o /trigger! q1 q 1 q 2 auto o /release! q0 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release q 0 man o /release! q0 q 2 man o /trigger! q2 auto_on/trigger {man o /release, auto o /release } L(q 0 ) {man o /release, auto o /trigger } L(q 1 ) q 2 TRIGGERED_AUTO man_off,man_on,auto_on/ {man o /trigger, auto o /release } L(q 2 ) characterization set W = {man o /trigger, man o /release, auto o /trigger, auto o /release }
108 W-Method S m n+1 Every TS = V i=0 i W is a complete test suite of F(M,I,O,, D m ),n= Q
109 W-Method S m n+1 Every TS = V i=0 i W is a complete test suite of F(M,I,O,, D m ),n= Q TS I = V I. S m n+1 i=0 I i.w I
110 Step 1. M =(Q, q 0,I,O,h),M 0 =(Q 0,q 0 0,I,O,h 0 ) 2 Sig. Suppose 9f : Q! Q 0 : f(q 0 )=q 0 0 (q 1,x,y,q 2 ) 2 h ) (f(q 1 ),x,y,f(q 2 )) 2 h 0 Then L(M) =L(M 0 ).
111 Step 1. M =(Q, q 0,I,O,h),M 0 =(Q 0,q0,I,O,h 0 0 ) 2 Sig. Suppose 9f : Q! Q 0 : f(q 0 )=q0 0 homomorphism (q 1,x,y,q 2 ) 2 h ) (f(q 1 ),x,y,f(q 2 )) 2 h 0 Then L(M) =L(M 0 ).
112 Proof of step 1. Suppose f : Q! Q 0,f(q 0 )=q 0 0, is a homomorphism. Then 8x 1...x k /y 1...y k 2 L(M), 9q i 2 Q, i =1,...,k: q 0 x 1 /y 1! q 1 x 2 /y 2! xk/y k! q k and q 0 0 = f(q 0 ) x 1/y 1! f(q 1 ) x 2/y 2! xk/y k! f(q k ) Then x 1...x k /y 1...y k 2 L(M 0 ) and L(M) L(M 0 ). Since M,M 0 are input complete and deterministic, we have L(M 0 )=L(M).
113 Step 2. M 0 =(Q 0,q 0 0,I,O,h 0 ) 2 D m. Suppose M 0 pass V S m n S m n i=0 i W Then V i=0 i is a state cover of M 0 and S m n+1 V i=0 i is a transition cover of M 0.
114 Proof of step M 0 pass(v. S m n+1 i=0 i.w ) \ L(M) ) (V. S m n+1 i=0 i.w ) \ L(M) =(V. S m n+1 i=0 i.w ) \ L(M 0 ) S m n+1 ) V i=0 i 0 W = V S m n+1 i=0 i 0 W 2. {q 0 0-after- ) 2 V } n 3. {q 0 0-after- 2 V S m n i=0 i } = Q 0
115 Proof of {{q 0 0-after- 2 V} n Let 0 = " { i i =0,...,n 1} V state cover of M q 0 q 0 0 i! qi i! q 0 i
116 Then i 6= j ) q 0 i 6= q0 j : 1. q i 6= q j )9 i 6= j 2 W : ii = ji, i 2 L(q i ), j 2 L(q j ) (W is a characterisation set of M) 2. i 2 L 0 (q 0 i ), j 2 L 0 (q 0 j ) ^ i I = ji 3. M 0 is deterministic ) L 0 (q 0 i ) 6= L0 (q 0 j ) ) q0 i 6= q0 j Hence n = {q 0 0,...,q 0 n 1} apple {q 0 0-after- 2 V }
117 Step 3. M 0 =(Q 0,q0,I,O,h 0 0 ) 2 D m. Suppose M 0 S m n+1 pass V i=0 i W. Then 9f : M 0! M homomorphism.
118 Proof of step 3. Let Q 0 =: {q0,...,q 0 m 0 1} {"} [ { i i =1,...m a state cover of M 0. 1} V S m n i=0 i, f : Q 0! Q, f(q 0 0)=q 0 and f(q 0 i )=q 0-after- i.
119 Proof of step 3. Let Q 0 =: {q0,...,q 0 m 0 1} {"} [ { i i =1,...m a state cover of M 0. 1} V S m n i=0 i, f : Q 0! Q, f(q 0 0)=q 0 and f(q 0 i )=q 0-after- i. Then f(q) is the unique state of M such that 2 L(q 0 ), 2 L(f(q)), 8 2 W
120 Proof of step 3. Let Q 0 =: {q0,...,q 0 m 0 1} {"} [ { i i =1,...m a state cover of M 0. 1} V S m n i=0 i, f : Q 0! Q, f(q 0 0)=q 0 and f(q 0 i )=q 0-after- i. Then f(q) is the unique state of M such that 2 L(q 0 ), 2 L(f(q)), 8 2 W
121 Then x/y 2 L(q 0 i ), x/y 2 L(q i), 8x/y 2 m n [q 0,q0 0 pass V [ i ] i=0 2 L(q 0 i ), 2 L(q i), 8 2 W m n [q 0,q0 0 pass V [ i W ] i=0 (x/y). 2 L(q 0 i ), (x/y). 2 L(q i), 8x/y 2, 2 W m n [q 0,q0 0 pass V [ i W ] i=0
122 q 0 0 i! q 0 i x/y! q 0 f f f? q 0 i! qi x/y! q 2 L(q 0 ), 2 L(q), 8 2 W ) f(q 0 )=q
123 Wp-Method F(M,I,O,apple, D m ), fault model D m = {M 0 =(Q 0,q 0 0,I,O,h 0 ) Sig Q 0 applem}
124 1. V a state cover of M. 2. P = V ({"} [ ) a transition cover of M 3. R = P \ V. 4. W a characterisation set of M. 5. {W 0,...,W n 1 } state identification sets of M, such that W i pref(w ) for i =0,...,n 1. W i distinguishes q i from all other states in Q.
125 Finite State Machine modelling the behaviour of the brake controller state cover V = {", man on/trigger, auto on/trigger} transition cover P = V [ V q 0 RELEASED auto_off,man_off/release q 0 auto o /release! q0 man_on/trigger man_off/release q 1 auto o /trigger! q1 q 1 q 2 auto o /release! q0 TRIGGERED auto_off, man_on/trigger auto_on/trigger auto_off/release q 0 man o /release! q0 q 2 man o /trigger! q2 auto_on/trigger {man o /release, auto o /release } L(q 0 ) W0 {man o /release, auto o /trigger } L(q 1 ) q 2 TRIGGERED_AUTO man_off,man_on,auto_on/ W2 W1 {man o /trigger, auto o /release } L(q 2 ) characterization set W = {man o /trigger, man o /release, auto o /trigger, auto o /release }
126 Wp-Method Wp 1 = V S m n i=0 i W Wp 2 = R m n {W 0,...,W n 1 } TS = Wp 1 [ Wp 2 is a complete test suite of F =(M,I,O,, D m ). U {W 0,...,W n 1 } = S 2U^q i =q 0 -after- { }.W i
127 Wp-Method Wp 1 = V S m n i=0 i W Wp 2 = R m n {W 0,...,W n 1 } TS = Wp 1 [ Wp 2 is a complete test suite of F =(M,I,O,, D m ). U {W 0,...,W n 1 } = S 2U^q i =q 0 -after- { }.W i
128 Further Reading 1. Publications of Jan Peleska, Wen-ling Huang, and their co-authors ERTMS/ETCS SystemRequirements Specification, Chapter 3, Principles, volume Subset-026-3, Issue (2015), available under Document-Register/Pages/Set-2-System-Requirements-Specification.aspx 3. Nancy Leveson. SafeWare: System Safety and Computers. Addison Wesley Neil Storey. Safety-critical Computer Systems. Addison-Welly, 1996.
Industrial Verification of Avionic, Automotive, and Railway Systems Practical Applications and Theoretical Foundations
 Industrial Verification of Avionic, Automotive, and Railway Systems Practical Applications and Theoretical Foundations Jan Peleska University of Bremen and Verified Systems International GmbH jp@cs.uni-bremen.de
Industrial Verification of Avionic, Automotive, and Railway Systems Practical Applications and Theoretical Foundations Jan Peleska University of Bremen and Verified Systems International GmbH jp@cs.uni-bremen.de
Complete Model-based Testing in Practise
 Complete Model-based Testing in Practise Jan Peleska University of Bremen and Verified Systems International GmbH jp@cs.uni-bremen.de TAV 2016 Program testing can best show the presence of errors but never
Complete Model-based Testing in Practise Jan Peleska University of Bremen and Verified Systems International GmbH jp@cs.uni-bremen.de TAV 2016 Program testing can best show the presence of errors but never
Semantic Families for Cyber-physical Systems
 Semantic Families for Cyber-physical Systems Jan Peleska University of Bremen Verified Systems International GmbH jp@cs.uni-bremen.de 2015-12-07 BCS FACS - Annual Peter Landin Semantics Seminar 2015 Overview
Semantic Families for Cyber-physical Systems Jan Peleska University of Bremen Verified Systems International GmbH jp@cs.uni-bremen.de 2015-12-07 BCS FACS - Annual Peter Landin Semantics Seminar 2015 Overview
Property Checking of Safety- Critical Systems Mathematical Foundations and Concrete Algorithms
 Property Checking of Safety- Critical Systems Mathematical Foundations and Concrete Algorithms Wen-ling Huang and Jan Peleska University of Bremen {huang,jp}@cs.uni-bremen.de MBT-Paradigm Model Is a partial
Property Checking of Safety- Critical Systems Mathematical Foundations and Concrete Algorithms Wen-ling Huang and Jan Peleska University of Bremen {huang,jp}@cs.uni-bremen.de MBT-Paradigm Model Is a partial
Test Automation. Foundations and Applications of Model-based Testing
 Test Automation Foundations and Applications of Model-based Testing Lecture Notes Jan Peleska and Wen-ling Huang {jp,huang}@cs.uni-bremen.de Issue 3.2 2017-04-26 Note. These lecture notes are still under
Test Automation Foundations and Applications of Model-based Testing Lecture Notes Jan Peleska and Wen-ling Huang {jp,huang}@cs.uni-bremen.de Issue 3.2 2017-04-26 Note. These lecture notes are still under
Evaluation and Improvement of ETCS Test Cases for the Ceiling Speed Monitor
 Evaluation and Improvement of ETCS Test Cases for the Ceiling Speed Monitor Jan Peleska, Cecile Braunstein, Wen-ling Huang, Felix Hübner, and Uwe Schulze Background ERTMS/ETCS specification describes system
Evaluation and Improvement of ETCS Test Cases for the Ceiling Speed Monitor Jan Peleska, Cecile Braunstein, Wen-ling Huang, Felix Hübner, and Uwe Schulze Background ERTMS/ETCS specification describes system
TESTING is one of the most important parts of the
 IEEE TRANSACTIONS 1 Generating Complete Controllable Test Suites for Distributed Testing Robert M. Hierons, Senior Member, IEEE Abstract A test suite is m-complete for finite state machine (FSM) M if it
IEEE TRANSACTIONS 1 Generating Complete Controllable Test Suites for Distributed Testing Robert M. Hierons, Senior Member, IEEE Abstract A test suite is m-complete for finite state machine (FSM) M if it
Specialised Test Strategies
 Grant Agreement: 287829 Comprehensive Modelling for Advanced Systems of Systems Specialised Test Strategies Technical Note Number: D34.2 Version: 2.1 Date: September 2013 Public Document http://www.compass-research.eu
Grant Agreement: 287829 Comprehensive Modelling for Advanced Systems of Systems Specialised Test Strategies Technical Note Number: D34.2 Version: 2.1 Date: September 2013 Public Document http://www.compass-research.eu
Industrial-Strength Model-Based Testing - State of the Art and Current Challenges
 Industrial-Strength Model-Based Testing - State of the Art and Current Challenges Jan Peleska University of Bremen, Department of Mathematics and Computer Science, Bremen, Germany Verified Systems International
Industrial-Strength Model-Based Testing - State of the Art and Current Challenges Jan Peleska University of Bremen, Department of Mathematics and Computer Science, Bremen, Germany Verified Systems International
Testing from a Finite State Machine: An introduction 1
 Testing from a Finite State Machine: An introduction 1 The use of Finite State Machines (FSM) to model systems has lead to much interest in deriving tests from them. Having derived a test sequence from
Testing from a Finite State Machine: An introduction 1 The use of Finite State Machines (FSM) to model systems has lead to much interest in deriving tests from them. Having derived a test sequence from
Comparing State Machines: Equivalence and Refinement
 Chapter 14 Comparing State Machines: Equivalence and Refinement Hongwei Zhang http://www.cs.wayne.edu/~hzhang/ Ack.: this lecture is prepared in part based on slides of Lee, Sangiovanni-Vincentelli, Seshia.
Chapter 14 Comparing State Machines: Equivalence and Refinement Hongwei Zhang http://www.cs.wayne.edu/~hzhang/ Ack.: this lecture is prepared in part based on slides of Lee, Sangiovanni-Vincentelli, Seshia.
CSE 105 THEORY OF COMPUTATION. Spring 2018 review class
 CSE 105 THEORY OF COMPUTATION Spring 2018 review class Today's learning goals Summarize key concepts, ideas, themes from CSE 105. Approach your final exam studying with confidence. Identify areas to focus
CSE 105 THEORY OF COMPUTATION Spring 2018 review class Today's learning goals Summarize key concepts, ideas, themes from CSE 105. Approach your final exam studying with confidence. Identify areas to focus
Automata and Languages
 Automata and Languages Prof. Mohamed Hamada Software Engineering Lab. The University of Aizu Japan FINITE STATE MACHINES (AUTOMATA) Switch Example Think about the On/Off button Switch Example The corresponding
Automata and Languages Prof. Mohamed Hamada Software Engineering Lab. The University of Aizu Japan FINITE STATE MACHINES (AUTOMATA) Switch Example Think about the On/Off button Switch Example The corresponding
Lecture Notes On THEORY OF COMPUTATION MODULE -1 UNIT - 2
 BIJU PATNAIK UNIVERSITY OF TECHNOLOGY, ODISHA Lecture Notes On THEORY OF COMPUTATION MODULE -1 UNIT - 2 Prepared by, Dr. Subhendu Kumar Rath, BPUT, Odisha. UNIT 2 Structure NON-DETERMINISTIC FINITE AUTOMATA
BIJU PATNAIK UNIVERSITY OF TECHNOLOGY, ODISHA Lecture Notes On THEORY OF COMPUTATION MODULE -1 UNIT - 2 Prepared by, Dr. Subhendu Kumar Rath, BPUT, Odisha. UNIT 2 Structure NON-DETERMINISTIC FINITE AUTOMATA
Testing Distributed Systems
 Testing Distributed Systems R. M. Hierons Brunel University, UK rob.hierons@brunel.ac.uk http://people.brunel.ac.uk/~csstrmh Work With Jessica Chen Mercedes Merayo Manuel Nunez Hasan Ural Model Based Testing
Testing Distributed Systems R. M. Hierons Brunel University, UK rob.hierons@brunel.ac.uk http://people.brunel.ac.uk/~csstrmh Work With Jessica Chen Mercedes Merayo Manuel Nunez Hasan Ural Model Based Testing
Embedded systems specification and design
 Embedded systems specification and design David Kendall David Kendall Embedded systems specification and design 1 / 21 Introduction Finite state machines (FSM) FSMs and Labelled Transition Systems FSMs
Embedded systems specification and design David Kendall David Kendall Embedded systems specification and design 1 / 21 Introduction Finite state machines (FSM) FSMs and Labelled Transition Systems FSMs
CSE 105 THEORY OF COMPUTATION
 CSE 105 THEORY OF COMPUTATION Spring 2017 http://cseweb.ucsd.edu/classes/sp17/cse105-ab/ Today's learning goals Summarize key concepts, ideas, themes from CSE 105. Approach your final exam studying with
CSE 105 THEORY OF COMPUTATION Spring 2017 http://cseweb.ucsd.edu/classes/sp17/cse105-ab/ Today's learning goals Summarize key concepts, ideas, themes from CSE 105. Approach your final exam studying with
A SysML Test Model and Test Suite for the ETCS Ceiling Speed Monitor Technical report, Work Package 4
 Downloaded from orbit.dtu.dk on: Dec 25, 2018 A SysML Test Model and Test Suite for the ETCS Ceiling Speed Monitor Technical report, Work Package 4 Braunstein, Cécile; Peleska, Jan; Schulze, Uwe; Hübner,
Downloaded from orbit.dtu.dk on: Dec 25, 2018 A SysML Test Model and Test Suite for the ETCS Ceiling Speed Monitor Technical report, Work Package 4 Braunstein, Cécile; Peleska, Jan; Schulze, Uwe; Hübner,
Safety Analysis Using Petri Nets
 Safety Analysis Using Petri Nets IEEE Transactions on Software Engineering (1987) Nancy G. Leveson and Janice L. Stolzy Park, Ji Hun 2010.06.21 Introduction Background Petri net Time petri net Contents
Safety Analysis Using Petri Nets IEEE Transactions on Software Engineering (1987) Nancy G. Leveson and Janice L. Stolzy Park, Ji Hun 2010.06.21 Introduction Background Petri net Time petri net Contents
Course Runtime Verification
 Course Martin Leucker (ISP) Volker Stolz (Høgskolen i Bergen, NO) INF5140 / V17 Chapters of the Course Chapter 1 Recall in More Depth Chapter 2 Specification Languages on Words Chapter 3 LTL on Finite
Course Martin Leucker (ISP) Volker Stolz (Høgskolen i Bergen, NO) INF5140 / V17 Chapters of the Course Chapter 1 Recall in More Depth Chapter 2 Specification Languages on Words Chapter 3 LTL on Finite
Abstractions and Decision Procedures for Effective Software Model Checking
 Abstractions and Decision Procedures for Effective Software Model Checking Prof. Natasha Sharygina The University of Lugano, Carnegie Mellon University Microsoft Summer School, Moscow, July 2011 Lecture
Abstractions and Decision Procedures for Effective Software Model Checking Prof. Natasha Sharygina The University of Lugano, Carnegie Mellon University Microsoft Summer School, Moscow, July 2011 Lecture
Finite State Machines 2
 Finite State Machines 2 Joseph Spring School of Computer Science 1COM0044 Foundations of Computation 1 Discussion Points In the last lecture we looked at: 1. Abstract Machines 2. Finite State Machines
Finite State Machines 2 Joseph Spring School of Computer Science 1COM0044 Foundations of Computation 1 Discussion Points In the last lecture we looked at: 1. Abstract Machines 2. Finite State Machines
Complete Model-Based Equivalence Class Testing for the ETCS Ceiling Speed Monitor
 Downloaded from orbit.dtu.dk on: Jul 06, 2018 Complete Model-Based Equivalence Class Testing for the ETCS Ceiling Speed Monitor Braunstein, Cécile; Haxthausen, Anne Elisabeth; Huang, Wen-ling; Hübner,
Downloaded from orbit.dtu.dk on: Jul 06, 2018 Complete Model-Based Equivalence Class Testing for the ETCS Ceiling Speed Monitor Braunstein, Cécile; Haxthausen, Anne Elisabeth; Huang, Wen-ling; Hübner,
FINITE STATE MACHINES (AUTOMATA)
") FINITE STATE MACHINES (AUTOMATA) Switch Example Think about the On/Off button Switch Example The corresponding Automaton Off Push On Push Input: Push Push Push Push Vending Machine Example 2 Vending machine
FINITE STATE MACHINES (AUTOMATA) Switch Example Think about the On/Off button Switch Example The corresponding Automaton Off Push On Push Input: Push Push Push Push Vending Machine Example 2 Vending machine
Design of Distributed Systems Melinda Tóth, Zoltán Horváth
 Design of Distributed Systems Melinda Tóth, Zoltán Horváth Design of Distributed Systems Melinda Tóth, Zoltán Horváth Publication date 2014 Copyright 2014 Melinda Tóth, Zoltán Horváth Supported by TÁMOP-412A/1-11/1-2011-0052
Design of Distributed Systems Melinda Tóth, Zoltán Horváth Design of Distributed Systems Melinda Tóth, Zoltán Horváth Publication date 2014 Copyright 2014 Melinda Tóth, Zoltán Horváth Supported by TÁMOP-412A/1-11/1-2011-0052
Using a Minimal Number of Resets when Testing from a Finite State Machine
 Using a Minimal Number of Resets when Testing from a Finite State Machine R. M. Hierons a a Department of Information Systems and Computing, Brunel University, Uxbridge, Middlesex, UB8 3PH, United Kingdom
Using a Minimal Number of Resets when Testing from a Finite State Machine R. M. Hierons a a Department of Information Systems and Computing, Brunel University, Uxbridge, Middlesex, UB8 3PH, United Kingdom
Relational Interfaces and Refinement Calculus for Compositional System Reasoning
 Relational Interfaces and Refinement Calculus for Compositional System Reasoning Viorel Preoteasa Joint work with Stavros Tripakis and Iulia Dragomir 1 Overview Motivation General refinement Relational
Relational Interfaces and Refinement Calculus for Compositional System Reasoning Viorel Preoteasa Joint work with Stavros Tripakis and Iulia Dragomir 1 Overview Motivation General refinement Relational
An integration testing method that is proved to find all faults
 An integration testing method that is proved to find all faults Florentin Ipate & Mike Holcombe Formal Methods and Software Engineering (FORMSOFT) Group Department of Computer Science University of Sheffield,
An integration testing method that is proved to find all faults Florentin Ipate & Mike Holcombe Formal Methods and Software Engineering (FORMSOFT) Group Department of Computer Science University of Sheffield,
Alan Bundy. Automated Reasoning LTL Model Checking
 Automated Reasoning LTL Model Checking Alan Bundy Lecture 9, page 1 Introduction So far we have looked at theorem proving Powerful, especially where good sets of rewrite rules or decision procedures have
Automated Reasoning LTL Model Checking Alan Bundy Lecture 9, page 1 Introduction So far we have looked at theorem proving Powerful, especially where good sets of rewrite rules or decision procedures have
Introduction. Pedro Cabalar. Department of Computer Science University of Corunna, SPAIN 2013/2014
 Introduction Pedro Cabalar Department of Computer Science University of Corunna, SPAIN cabalar@udc.es 2013/2014 P. Cabalar ( Department Introduction of Computer Science University of Corunna, SPAIN2013/2014
Introduction Pedro Cabalar Department of Computer Science University of Corunna, SPAIN cabalar@udc.es 2013/2014 P. Cabalar ( Department Introduction of Computer Science University of Corunna, SPAIN2013/2014
DVClub Europe Formal fault analysis for ISO fault metrics on real world designs. Jörg Große Product Manager Functional Safety November 2016
 DVClub Europe Formal fault analysis for ISO 26262 fault metrics on real world designs Jörg Große Product Manager Functional Safety November 2016 Page 1 11/27/2016 Introduction Functional Safety The objective
DVClub Europe Formal fault analysis for ISO 26262 fault metrics on real world designs Jörg Große Product Manager Functional Safety November 2016 Page 1 11/27/2016 Introduction Functional Safety The objective
Finite Automata and Regular Languages (part III)
") Finite Automata and Regular Languages (part III) Prof. Dan A. Simovici UMB 1 / 1 Outline 2 / 1 Nondeterministic finite automata can be further generalized by allowing transitions between states without
Finite Automata and Regular Languages (part III) Prof. Dan A. Simovici UMB 1 / 1 Outline 2 / 1 Nondeterministic finite automata can be further generalized by allowing transitions between states without
Overview. 1 Lecture 1: Introduction. 2 Lecture 2: Message Sequence Charts. Joost-Pieter Katoen Theoretical Foundations of the UML 1/32
 Overview 1 Lecture 1: Introduction 2 Lecture 2: Message Sequence Charts Joost-Pieter Katoen Theoretical Foundations of the UML 1/32 Theoretical Foundations of the UML Lecture 1: Introduction Joost-Pieter
Overview 1 Lecture 1: Introduction 2 Lecture 2: Message Sequence Charts Joost-Pieter Katoen Theoretical Foundations of the UML 1/32 Theoretical Foundations of the UML Lecture 1: Introduction Joost-Pieter
The State Explosion Problem
 The State Explosion Problem Martin Kot August 16, 2003 1 Introduction One from main approaches to checking correctness of a concurrent system are state space methods. They are suitable for automatic analysis
The State Explosion Problem Martin Kot August 16, 2003 1 Introduction One from main approaches to checking correctness of a concurrent system are state space methods. They are suitable for automatic analysis
HELLA AGLAIA MOBILE VISION GMBH
 HELLA AGLAIA MOBILE VISION GMBH DRIVING SOFTWARE INNOVATION H E L L A A g l a i a M o b i l e V i s i o n G m b H I C o m p a n y P r e s e n t a t i o n I D e l h i, A u g u s t 2 0 1 7 11 Hella Aglaia
HELLA AGLAIA MOBILE VISION GMBH DRIVING SOFTWARE INNOVATION H E L L A A g l a i a M o b i l e V i s i o n G m b H I C o m p a n y P r e s e n t a t i o n I D e l h i, A u g u s t 2 0 1 7 11 Hella Aglaia
Testing for Refinement in CSP
 Author manuscript, published in "Formal Methods and Software Engineering, ICFEM 2007, Boca-Raton : United States (2007)" Testing for Refinement in CSP Ana Cavalcanti 1 and Marie-Claude Gaudel 2 1 University
Author manuscript, published in "Formal Methods and Software Engineering, ICFEM 2007, Boca-Raton : United States (2007)" Testing for Refinement in CSP Ana Cavalcanti 1 and Marie-Claude Gaudel 2 1 University
DIAGNOSING MULTIPLE FAULTS IN COMMUNICATING FINITE STATE MACHINES
 DIAGNOSING MULTIPLE FAULTS IN COMMUNICATING FINITE STATE MACHINES Khaled El-Fakih+, Nina Yevtushenko++ and Gregor v. Bochmann+ +School of Information Technology and Engineering,University of Ottawa, ON,
DIAGNOSING MULTIPLE FAULTS IN COMMUNICATING FINITE STATE MACHINES Khaled El-Fakih+, Nina Yevtushenko++ and Gregor v. Bochmann+ +School of Information Technology and Engineering,University of Ottawa, ON,
(Refer Slide Time: 0:21)
") Theory of Computation Prof. Somenath Biswas Department of Computer Science and Engineering Indian Institute of Technology Kanpur Lecture 7 A generalisation of pumping lemma, Non-deterministic finite automata
Theory of Computation Prof. Somenath Biswas Department of Computer Science and Engineering Indian Institute of Technology Kanpur Lecture 7 A generalisation of pumping lemma, Non-deterministic finite automata
PSL Model Checking and Run-time Verification via Testers
 PSL Model Checking and Run-time Verification via Testers Formal Methods 2006 Aleksandr Zaks and Amir Pnueli New York University Introduction Motivation (Why PSL?) A new property specification language,
PSL Model Checking and Run-time Verification via Testers Formal Methods 2006 Aleksandr Zaks and Amir Pnueli New York University Introduction Motivation (Why PSL?) A new property specification language,
Introduction to the Theory of Computation. Automata 1VO + 1PS. Lecturer: Dr. Ana Sokolova.
 Introduction to the Theory of Computation Automata 1VO + 1PS Lecturer: Dr. Ana Sokolova http://cs.uni-salzburg.at/~anas/ Setup and Dates Lectures and Instructions 23.10. 3.11. 17.11. 24.11. 1.12. 11.12.
Introduction to the Theory of Computation Automata 1VO + 1PS Lecturer: Dr. Ana Sokolova http://cs.uni-salzburg.at/~anas/ Setup and Dates Lectures and Instructions 23.10. 3.11. 17.11. 24.11. 1.12. 11.12.
 Introduction: Computer Science is a cluster of related scientific and engineering disciplines concerned with the study and application of computations. These disciplines range from the pure and basic scientific
Introduction: Computer Science is a cluster of related scientific and engineering disciplines concerned with the study and application of computations. These disciplines range from the pure and basic scientific
Automata & languages. A primer on the Theory of Computation. Laurent Vanbever. ETH Zürich (D-ITET) September,
 September,") Automata & languages A primer on the Theory of Computation Laurent Vanbever www.vanbever.eu ETH Zürich (D-ITET) September, 24 2015 Last week was all about Deterministic Finite Automaton We saw three main
Automata & languages A primer on the Theory of Computation Laurent Vanbever www.vanbever.eu ETH Zürich (D-ITET) September, 24 2015 Last week was all about Deterministic Finite Automaton We saw three main
DISTINGUISHABILITY RELATIONS BETWEEN INITIALIZED NONDETERMINISTIC FSMs. Nina Yevtushenko Tomsk State University, Russia April, 12, 2011
 DISTINGUISHABILITY RELATIONS BETWEEN INITIALIZED NONDETERMINISTIC FSMs Nina Yevtushenko Tomsk State University, Russia April, 12, 2011 Outline 1. Why do we need distinguishability relations? 2. External
DISTINGUISHABILITY RELATIONS BETWEEN INITIALIZED NONDETERMINISTIC FSMs Nina Yevtushenko Tomsk State University, Russia April, 12, 2011 Outline 1. Why do we need distinguishability relations? 2. External
Inf2A: Converting from NFAs to DFAs and Closure Properties
 1/43 Inf2A: Converting from NFAs to DFAs and Stuart Anderson School of Informatics University of Edinburgh October 13, 2009 Starter Questions 2/43 1 Can you devise a way of testing for any FSM M whether
1/43 Inf2A: Converting from NFAs to DFAs and Stuart Anderson School of Informatics University of Edinburgh October 13, 2009 Starter Questions 2/43 1 Can you devise a way of testing for any FSM M whether
Outline. Nondetermistic Finite Automata. Transition diagrams. A finite automaton is a 5-tuple (Q, Σ,δ,q 0,F)
") Outline Nondeterminism Regular expressions Elementary reductions http://www.cs.caltech.edu/~cs20/a October 8, 2002 1 Determistic Finite Automata A finite automaton is a 5-tuple (Q, Σ,δ,q 0,F) Q is a finite
Outline Nondeterminism Regular expressions Elementary reductions http://www.cs.caltech.edu/~cs20/a October 8, 2002 1 Determistic Finite Automata A finite automaton is a 5-tuple (Q, Σ,δ,q 0,F) Q is a finite
Finite-State Machines (Automata) lecture 12
 lecture 12") Finite-State Machines (Automata) lecture 12 cl a simple form of computation used widely one way to find patterns 1 A current D B A B C D B C D A C next 2 Application Fields Industry real-time control,
Finite-State Machines (Automata) lecture 12 cl a simple form of computation used widely one way to find patterns 1 A current D B A B C D B C D A C next 2 Application Fields Industry real-time control,
Homing and Synchronizing Sequences
 Homing and Synchronizing Sequences Sven Sandberg Information Technology Department Uppsala University Sweden 1 Outline 1. Motivations 2. Definitions and Examples 3. Algorithms (a) Current State Uncertainty
Homing and Synchronizing Sequences Sven Sandberg Information Technology Department Uppsala University Sweden 1 Outline 1. Motivations 2. Definitions and Examples 3. Algorithms (a) Current State Uncertainty
Recap DFA,NFA, DTM. Slides by Prof. Debasis Mitra, FIT.
 Recap DFA,NFA, DTM Slides by Prof. Debasis Mitra, FIT. 1 Formal Language Finite set of alphabets Σ: e.g., {0, 1}, {a, b, c}, { {, } } Language L is a subset of strings on Σ, e.g., {00, 110, 01} a finite
Recap DFA,NFA, DTM Slides by Prof. Debasis Mitra, FIT. 1 Formal Language Finite set of alphabets Σ: e.g., {0, 1}, {a, b, c}, { {, } } Language L is a subset of strings on Σ, e.g., {00, 110, 01} a finite
Timo Latvala. March 7, 2004
 Reactive Systems: Safety, Liveness, and Fairness Timo Latvala March 7, 2004 Reactive Systems: Safety, Liveness, and Fairness 14-1 Safety Safety properties are a very useful subclass of specifications.
Reactive Systems: Safety, Liveness, and Fairness Timo Latvala March 7, 2004 Reactive Systems: Safety, Liveness, and Fairness 14-1 Safety Safety properties are a very useful subclass of specifications.
Automata and Languages
 Automata and Languages Prof. Mohamed Hamada Software Engineering Lab. The University of Aizu Japan Nondeterministic Finite Automata with empty moves (-NFA) Definition A nondeterministic finite automaton
Automata and Languages Prof. Mohamed Hamada Software Engineering Lab. The University of Aizu Japan Nondeterministic Finite Automata with empty moves (-NFA) Definition A nondeterministic finite automaton
Advanced Automata Theory 7 Automatic Functions
 Advanced Automata Theory 7 Automatic Functions Frank Stephan Department of Computer Science Department of Mathematics National University of Singapore fstephan@comp.nus.edu.sg Advanced Automata Theory
Advanced Automata Theory 7 Automatic Functions Frank Stephan Department of Computer Science Department of Mathematics National University of Singapore fstephan@comp.nus.edu.sg Advanced Automata Theory
UNIT-III REGULAR LANGUAGES
 Syllabus R9 Regulation REGULAR EXPRESSIONS UNIT-III REGULAR LANGUAGES Regular expressions are useful for representing certain sets of strings in an algebraic fashion. In arithmetic we can use the operations
Syllabus R9 Regulation REGULAR EXPRESSIONS UNIT-III REGULAR LANGUAGES Regular expressions are useful for representing certain sets of strings in an algebraic fashion. In arithmetic we can use the operations
Lecture 05: High-Level Design with SysML. An Introduction to SysML. Where are we? What is a model? The Unified Modeling Language (UML)
") Where are we? Systeme hoher Sicherheit und Qualität Universität Bremen, WS 2017/2018 Lecture 05: High-Level Design with SysML Christoph Lüth, Dieter Hutter, Jan Peleska 01: Concepts of Quality 02: Legal
Where are we? Systeme hoher Sicherheit und Qualität Universität Bremen, WS 2017/2018 Lecture 05: High-Level Design with SysML Christoph Lüth, Dieter Hutter, Jan Peleska 01: Concepts of Quality 02: Legal
Probabilistic testing coverage
 Probabilistic testing coverage NICOLAE GOGA Eindhoven University of Technology P.O. Box 513, 5600 MB Eindhoven THE NETHERLANDS Abstract: This paper describes a way to compute the coverage for an on-the-fly
Probabilistic testing coverage NICOLAE GOGA Eindhoven University of Technology P.O. Box 513, 5600 MB Eindhoven THE NETHERLANDS Abstract: This paper describes a way to compute the coverage for an on-the-fly
The Pumping Lemma. for all n 0, u 1 v n u 2 L (i.e. u 1 u 2 L, u 1 vu 2 L [but we knew that anyway], u 1 vvu 2 L, u 1 vvvu 2 L, etc.
![The Pumping Lemma. for all n 0, u 1 v n u 2 L (i.e. u 1 u 2 L, u 1 vu 2 L [but we knew that anyway], u 1 vvu 2 L, u 1 vvvu 2 L, etc.](/thumbs/89/99844223.jpg "The Pumping Lemma. for all n 0, u 1 v n u 2 L (i.e. u 1 u 2 L, u 1 vu 2 L [but we knew that anyway], u 1 vvu 2 L, u 1 vvvu 2 L, etc.") The Pumping Lemma For every regular language L, there is a number l 1 satisfying the pumping lemma property: All w L with w l can be expressed as a concatenation of three strings, w = u 1 vu 2, where u
The Pumping Lemma For every regular language L, there is a number l 1 satisfying the pumping lemma property: All w L with w l can be expressed as a concatenation of three strings, w = u 1 vu 2, where u
Nondeterministic Finite Automata
 Nondeterministic Finite Automata Not A DFA Does not have exactly one transition from every state on every symbol: Two transitions from q 0 on a No transition from q 1 (on either a or b) Though not a DFA,
Nondeterministic Finite Automata Not A DFA Does not have exactly one transition from every state on every symbol: Two transitions from q 0 on a No transition from q 1 (on either a or b) Though not a DFA,
Deterministic Finite Automata
 Deterministic Finite Automata COMP2600 Formal Methods for Software Engineering Ranald Clouston Australian National University Semester 2, 2013 COMP 2600 Deterministic Finite Automata 1 Pop quiz What is
Deterministic Finite Automata COMP2600 Formal Methods for Software Engineering Ranald Clouston Australian National University Semester 2, 2013 COMP 2600 Deterministic Finite Automata 1 Pop quiz What is
Chapter 2. Reductions and NP. 2.1 Reductions Continued The Satisfiability Problem (SAT) SAT 3SAT. CS 573: Algorithms, Fall 2013 August 29, 2013
 SAT 3SAT. CS 573: Algorithms, Fall 2013 August 29, 2013") Chapter 2 Reductions and NP CS 573: Algorithms, Fall 2013 August 29, 2013 2.1 Reductions Continued 2.1.1 The Satisfiability Problem SAT 2.1.1.1 Propositional Formulas Definition 2.1.1. Consider a set of
Chapter 2 Reductions and NP CS 573: Algorithms, Fall 2013 August 29, 2013 2.1 Reductions Continued 2.1.1 The Satisfiability Problem SAT 2.1.1.1 Propositional Formulas Definition 2.1.1. Consider a set of
CS243, Logic and Computation Nondeterministic finite automata
 CS243, Prof. Alvarez NONDETERMINISTIC FINITE AUTOMATA (NFA) Prof. Sergio A. Alvarez http://www.cs.bc.edu/ alvarez/ Maloney Hall, room 569 alvarez@cs.bc.edu Computer Science Department voice: (67) 552-4333
CS243, Prof. Alvarez NONDETERMINISTIC FINITE AUTOMATA (NFA) Prof. Sergio A. Alvarez http://www.cs.bc.edu/ alvarez/ Maloney Hall, room 569 alvarez@cs.bc.edu Computer Science Department voice: (67) 552-4333
CMPSCI 250: Introduction to Computation. Lecture #22: From λ-nfa s to NFA s to DFA s David Mix Barrington 22 April 2013
 CMPSCI 250: Introduction to Computation Lecture #22: From λ-nfa s to NFA s to DFA s David Mix Barrington 22 April 2013 λ-nfa s to NFA s to DFA s Reviewing the Three Models and Kleene s Theorem The Subset
CMPSCI 250: Introduction to Computation Lecture #22: From λ-nfa s to NFA s to DFA s David Mix Barrington 22 April 2013 λ-nfa s to NFA s to DFA s Reviewing the Three Models and Kleene s Theorem The Subset
Peter Wood. Department of Computer Science and Information Systems Birkbeck, University of London Automata and Formal Languages
 and and Department of Computer Science and Information Systems Birkbeck, University of London ptw@dcs.bbk.ac.uk Outline and Doing and analysing problems/languages computability/solvability/decidability
and and Department of Computer Science and Information Systems Birkbeck, University of London ptw@dcs.bbk.ac.uk Outline and Doing and analysing problems/languages computability/solvability/decidability
DISTINGUING NON-DETERMINISTIC TIMED FINITE STATE MACHINES
 DISTINGUING NON-DETERMINISTIC TIMED FINITE STATE MACHINES Maxim Gromov 1, Khaled El-Fakih 2, Natalia Shabaldina 1, Nina Yevtushenko 1 1 Tomsk State University, 36 Lenin Str.. Tomsk, 634050, Russia gromov@sibmail.com,
DISTINGUING NON-DETERMINISTIC TIMED FINITE STATE MACHINES Maxim Gromov 1, Khaled El-Fakih 2, Natalia Shabaldina 1, Nina Yevtushenko 1 1 Tomsk State University, 36 Lenin Str.. Tomsk, 634050, Russia gromov@sibmail.com,
Understanding Process Semantics
 TU München March, 2017 Understanding Process Semantics David de Frutos Escrig In collaboration with: Carlos Gregorio Rodríguez, Miguel Palomino and Ignacio Fábregas Departamento de Sistemas Informáticos
TU München March, 2017 Understanding Process Semantics David de Frutos Escrig In collaboration with: Carlos Gregorio Rodríguez, Miguel Palomino and Ignacio Fábregas Departamento de Sistemas Informáticos
Industrial Automation (Automação de Processos Industriais)
") Industrial Automation (Automação de Processos Industriais) Discrete Event Systems http://users.isr.ist.utl.pt/~jag/courses/api1516/api1516.html Slides 2010/2011 Prof. Paulo Jorge Oliveira Rev. 2011-2015
Industrial Automation (Automação de Processos Industriais) Discrete Event Systems http://users.isr.ist.utl.pt/~jag/courses/api1516/api1516.html Slides 2010/2011 Prof. Paulo Jorge Oliveira Rev. 2011-2015
2. Elements of the Theory of Computation, Lewis and Papadimitrou,
 Introduction Finite Automata DFA, regular languages Nondeterminism, NFA, subset construction Regular Epressions Synta, Semantics Relationship to regular languages Properties of regular languages Pumping
Introduction Finite Automata DFA, regular languages Nondeterminism, NFA, subset construction Regular Epressions Synta, Semantics Relationship to regular languages Properties of regular languages Pumping
Rheological Testing Equipment for Polymers
 Rheological Testing Equipment for Polymers In the year 1962, when most people were not familiar with Rheology, GOETTFERT company started as one of the pioneering companies in this field and built its first
Rheological Testing Equipment for Polymers In the year 1962, when most people were not familiar with Rheology, GOETTFERT company started as one of the pioneering companies in this field and built its first
(b) If G=({S}, {a}, {S SS}, S) find the language generated by G. [8+8] 2. Convert the following grammar to Greibach Normal Form G = ({A1, A2, A3},
![(b) If G=({S}, {a}, {S SS}, S) find the language generated by G. [8+8] 2. Convert the following grammar to Greibach Normal Form G = ({A1, A2, A3},](/thumbs/81/83182922.jpg "(b) If G=({S}, {a}, {S SS}, S) find the language generated by G. [8+8] 2. Convert the following grammar to Greibach Normal Form G = ({A1, A2, A3},") Code No: 07A50501 R07 Set No. 2 III B.Tech I Semester Examinations,MAY 2011 FORMAL LANGUAGES AND AUTOMATA THEORY Computer Science And Engineering Time: 3 hours Max Marks: 80 Answer any FIVE Questions All
Code No: 07A50501 R07 Set No. 2 III B.Tech I Semester Examinations,MAY 2011 FORMAL LANGUAGES AND AUTOMATA THEORY Computer Science And Engineering Time: 3 hours Max Marks: 80 Answer any FIVE Questions All
CMSC 330: Organization of Programming Languages
 CMSC 330: Organization of Programming Languages Theory of Regular Expressions DFAs and NFAs Reminders Project 1 due Sep. 24 Homework 1 posted Exam 1 on Sep. 25 Exam topics list posted Practice homework
CMSC 330: Organization of Programming Languages Theory of Regular Expressions DFAs and NFAs Reminders Project 1 due Sep. 24 Homework 1 posted Exam 1 on Sep. 25 Exam topics list posted Practice homework
EE249 - Fall 2012 Lecture 18: Overview of Concrete Contract Theories. Alberto Sangiovanni-Vincentelli Pierluigi Nuzzo
 EE249 - Fall 2012 Lecture 18: Overview of Concrete Contract Theories 1 Alberto Sangiovanni-Vincentelli Pierluigi Nuzzo Outline: Contracts and compositional methods for system design Where and why using
EE249 - Fall 2012 Lecture 18: Overview of Concrete Contract Theories 1 Alberto Sangiovanni-Vincentelli Pierluigi Nuzzo Outline: Contracts and compositional methods for system design Where and why using
Uses of finite automata
 Chapter 2 :Finite Automata 2.1 Finite Automata Automata are computational devices to solve language recognition problems. Language recognition problem is to determine whether a word belongs to a language.
Chapter 2 :Finite Automata 2.1 Finite Automata Automata are computational devices to solve language recognition problems. Language recognition problem is to determine whether a word belongs to a language.
On Properties and State Complexity of Deterministic State-Partition Automata
 On Properties and State Complexity of Deterministic State-Partition Automata Galina Jirásková 1, and Tomáš Masopust 2, 1 Mathematical Institute, Slovak Academy of Sciences Grešákova 6, 040 01 Košice, Slovak
On Properties and State Complexity of Deterministic State-Partition Automata Galina Jirásková 1, and Tomáš Masopust 2, 1 Mathematical Institute, Slovak Academy of Sciences Grešákova 6, 040 01 Košice, Slovak
Let us first give some intuitive idea about a state of a system and state transitions before describing finite automata.
 Finite Automata Automata (singular: automation) are a particularly simple, but useful, model of computation. They were initially proposed as a simple model for the behavior of neurons. The concept of a
Finite Automata Automata (singular: automation) are a particularly simple, but useful, model of computation. They were initially proposed as a simple model for the behavior of neurons. The concept of a
Computational Models #1
 Computational Models #1 Handout Mode Nachum Dershowitz & Yishay Mansour March 13-15, 2017 Nachum Dershowitz & Yishay Mansour Computational Models #1 March 13-15, 2017 1 / 41 Lecture Outline I Motivation
Computational Models #1 Handout Mode Nachum Dershowitz & Yishay Mansour March 13-15, 2017 Nachum Dershowitz & Yishay Mansour Computational Models #1 March 13-15, 2017 1 / 41 Lecture Outline I Motivation
6.045J/18.400J: Automata, Computability and Complexity Final Exam. There are two sheets of scratch paper at the end of this exam.
 6.045J/18.400J: Automata, Computability and Complexity May 20, 2005 6.045 Final Exam Prof. Nancy Lynch Name: Please write your name on each page. This exam is open book, open notes. There are two sheets
6.045J/18.400J: Automata, Computability and Complexity May 20, 2005 6.045 Final Exam Prof. Nancy Lynch Name: Please write your name on each page. This exam is open book, open notes. There are two sheets
CS 530: Theory of Computation Based on Sipser (second edition): Notes on regular languages(version 1.1)
: Notes on regular languages(version 1.1)") CS 530: Theory of Computation Based on Sipser (second edition): Notes on regular languages(version 1.1) Definition 1 (Alphabet) A alphabet is a finite set of objects called symbols. Definition 2 (String)
CS 530: Theory of Computation Based on Sipser (second edition): Notes on regular languages(version 1.1) Definition 1 (Alphabet) A alphabet is a finite set of objects called symbols. Definition 2 (String)
A General Testability Theory: Classes, properties, complexity, and testing reductions
 A General Testability Theory: Classes, properties, complexity, and testing reductions presenting joint work with Luis Llana and Pablo Rabanal Universidad Complutense de Madrid PROMETIDOS-CM WINTER SCHOOL
A General Testability Theory: Classes, properties, complexity, and testing reductions presenting joint work with Luis Llana and Pablo Rabanal Universidad Complutense de Madrid PROMETIDOS-CM WINTER SCHOOL
Duality in Probabilistic Automata
 Duality in Probabilistic Automata Chris Hundt Prakash Panangaden Joelle Pineau Doina Precup Gavin Seal McGill University MFPS May 2006 Genoa p.1/40 Overview We have discovered an - apparently - new kind
Duality in Probabilistic Automata Chris Hundt Prakash Panangaden Joelle Pineau Doina Precup Gavin Seal McGill University MFPS May 2006 Genoa p.1/40 Overview We have discovered an - apparently - new kind
Introduction to the Theory of Computation. Automata 1VO + 1PS. Lecturer: Dr. Ana Sokolova.
 Introduction to the Theory of Computation Automata 1VO + 1PS Lecturer: Dr. Ana Sokolova http://cs.uni-salzburg.at/~anas/ Setup and Dates Lectures Tuesday 10:45 pm - 12:15 pm Instructions Tuesday 12:30
Introduction to the Theory of Computation Automata 1VO + 1PS Lecturer: Dr. Ana Sokolova http://cs.uni-salzburg.at/~anas/ Setup and Dates Lectures Tuesday 10:45 pm - 12:15 pm Instructions Tuesday 12:30
COSE312: Compilers. Lecture 2 Lexical Analysis (1)
") COSE312: Compilers Lecture 2 Lexical Analysis (1) Hakjoo Oh 2017 Spring Hakjoo Oh COSE312 2017 Spring, Lecture 2 March 12, 2017 1 / 15 Lexical Analysis ex) Given a C program float match0 (char *s) /* find
COSE312: Compilers Lecture 2 Lexical Analysis (1) Hakjoo Oh 2017 Spring Hakjoo Oh COSE312 2017 Spring, Lecture 2 March 12, 2017 1 / 15 Lexical Analysis ex) Given a C program float match0 (char *s) /* find
Theory of Computation
 Fall 2002 (YEN) Theory of Computation Midterm Exam. Name:... I.D.#:... 1. (30 pts) True or false (mark O for true ; X for false ). (Score=Max{0, Right- 1 2 Wrong}.) (1) X... If L 1 is regular and L 2 L
Fall 2002 (YEN) Theory of Computation Midterm Exam. Name:... I.D.#:... 1. (30 pts) True or false (mark O for true ; X for false ). (Score=Max{0, Right- 1 2 Wrong}.) (1) X... If L 1 is regular and L 2 L
Lecture Notes on Inductive Definitions
 Lecture Notes on Inductive Definitions 15-312: Foundations of Programming Languages Frank Pfenning Lecture 2 August 28, 2003 These supplementary notes review the notion of an inductive definition and give
Lecture Notes on Inductive Definitions 15-312: Foundations of Programming Languages Frank Pfenning Lecture 2 August 28, 2003 These supplementary notes review the notion of an inductive definition and give
Finite Automata Theory and Formal Languages TMV027/DIT321 LP4 2018
 Finite Automata Theory and Formal Languages TMV027/DIT321 LP4 2018 Lecture 9 Ana Bove April 19th 2018 Recap: Regular Expressions Algebraic representation of (regular) languages; R, S ::= a R + S RS R......
Finite Automata Theory and Formal Languages TMV027/DIT321 LP4 2018 Lecture 9 Ana Bove April 19th 2018 Recap: Regular Expressions Algebraic representation of (regular) languages; R, S ::= a R + S RS R......
Further discussion of Turing machines
 Further discussion of Turing machines In this lecture we will discuss various aspects of decidable and Turing-recognizable languages that were not mentioned in previous lectures. In particular, we will
Further discussion of Turing machines In this lecture we will discuss various aspects of decidable and Turing-recognizable languages that were not mentioned in previous lectures. In particular, we will
3 Probabilistic Turing Machines
 CS 252 - Probabilistic Turing Machines (Algorithms) Additional Reading 3 and Homework problems 3 Probabilistic Turing Machines When we talked about computability, we found that nondeterminism was sometimes
CS 252 - Probabilistic Turing Machines (Algorithms) Additional Reading 3 and Homework problems 3 Probabilistic Turing Machines When we talked about computability, we found that nondeterminism was sometimes
CS256/Spring 2008 Lecture #11 Zohar Manna. Beyond Temporal Logics
 CS256/Spring 2008 Lecture #11 Zohar Manna Beyond Temporal Logics Temporal logic expresses properties of infinite sequences of states, but there are interesting properties that cannot be expressed, e.g.,
CS256/Spring 2008 Lecture #11 Zohar Manna Beyond Temporal Logics Temporal logic expresses properties of infinite sequences of states, but there are interesting properties that cannot be expressed, e.g.,
Hashing Techniques For Finite Automata
 Hashing Techniques For Finite Automata Hady Zeineddine Logic Synthesis Course Project - Spring 2007 Professor Adnan Aziz 1. Abstract This report presents two hashing techniques - Alphabet and Power-Set
Hashing Techniques For Finite Automata Hady Zeineddine Logic Synthesis Course Project - Spring 2007 Professor Adnan Aziz 1. Abstract This report presents two hashing techniques - Alphabet and Power-Set
Mixed Criticality in Safety-Critical Systems. LS 12, TU Dortmund
 Mixed Criticality in Safety-Critical Systems Prof. Dr. Jian-Jia Chen LS 12, TU Dortmund 18, July, 2016 Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 25 Motivation today s embedded systems use complex
Mixed Criticality in Safety-Critical Systems Prof. Dr. Jian-Jia Chen LS 12, TU Dortmund 18, July, 2016 Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 25 Motivation today s embedded systems use complex
Erly Marsh - a Model-Based Testing tool. Johan Blom, PhD
 Erly Marsh - a Model-Based Testing tool Johan Blom, PhD 1 Motivation Mobile Arts Develops server software for mobile telecom operators (Location server, SMSC etc.) Implementations rather big and complicated
Erly Marsh - a Model-Based Testing tool Johan Blom, PhD 1 Motivation Mobile Arts Develops server software for mobile telecom operators (Location server, SMSC etc.) Implementations rather big and complicated
CISC 4090: Theory of Computation Chapter 1 Regular Languages. Section 1.1: Finite Automata. What is a computer? Finite automata
 CISC 4090: Theory of Computation Chapter Regular Languages Xiaolan Zhang, adapted from slides by Prof. Werschulz Section.: Finite Automata Fordham University Department of Computer and Information Sciences
CISC 4090: Theory of Computation Chapter Regular Languages Xiaolan Zhang, adapted from slides by Prof. Werschulz Section.: Finite Automata Fordham University Department of Computer and Information Sciences
acs-04: Regular Languages Regular Languages Andreas Karwath & Malte Helmert Informatik Theorie II (A) WS2009/10
 WS2009/10") Regular Languages Andreas Karwath & Malte Helmert 1 Overview Deterministic finite automata Regular languages Nondeterministic finite automata Closure operations Regular expressions Nonregular languages
Regular Languages Andreas Karwath & Malte Helmert 1 Overview Deterministic finite automata Regular languages Nondeterministic finite automata Closure operations Regular expressions Nonregular languages
Lecture Notes on Inductive Definitions
 Lecture Notes on Inductive Definitions 15-312: Foundations of Programming Languages Frank Pfenning Lecture 2 September 2, 2004 These supplementary notes review the notion of an inductive definition and
Lecture Notes on Inductive Definitions 15-312: Foundations of Programming Languages Frank Pfenning Lecture 2 September 2, 2004 These supplementary notes review the notion of an inductive definition and
PDF hosted at the Radboud Repository of the Radboud University Nijmegen
 PDF hosted at the Radboud Repository of the Radboud University Nijmegen The following full text is a preprint version which may differ from the publisher's version. For additional information about this
PDF hosted at the Radboud Repository of the Radboud University Nijmegen The following full text is a preprint version which may differ from the publisher's version. For additional information about this
Formal Specification and Verification. Specifications
 Formal Specification and Verification Specifications Imprecise specifications can cause serious problems downstream Lots of interpretations even with technicaloriented natural language The value returned
Formal Specification and Verification Specifications Imprecise specifications can cause serious problems downstream Lots of interpretations even with technicaloriented natural language The value returned
Exam Computability and Complexity
 Total number of points:... Number of extra sheets of paper:... Exam Computability and Complexity by Jiri Srba, January 2009 Student s full name CPR number Study number Before you start, fill in the three
Total number of points:... Number of extra sheets of paper:... Exam Computability and Complexity by Jiri Srba, January 2009 Student s full name CPR number Study number Before you start, fill in the three
Theory of Computation p.1/?? Theory of Computation p.2/?? Unknown: Implicitly a Boolean variable: true if a word is
 Abstraction of Problems Data: abstracted as a word in a given alphabet. Σ: alphabet, a finite, non-empty set of symbols. Σ : all the words of finite length built up using Σ: Conditions: abstracted as a
Abstraction of Problems Data: abstracted as a word in a given alphabet. Σ: alphabet, a finite, non-empty set of symbols. Σ : all the words of finite length built up using Σ: Conditions: abstracted as a
Finite Automata and Regular languages
 Finite Automata and Regular languages Huan Long Shanghai Jiao Tong University Acknowledgements Part of the slides comes from a similar course in Fudan University given by Prof. Yijia Chen. http://basics.sjtu.edu.cn/
Finite Automata and Regular languages Huan Long Shanghai Jiao Tong University Acknowledgements Part of the slides comes from a similar course in Fudan University given by Prof. Yijia Chen. http://basics.sjtu.edu.cn/
Classes and conversions
 Classes and conversions Regular expressions Syntax: r = ε a r r r + r r Semantics: The language L r of a regular expression r is inductively defined as follows: L =, L ε = {ε}, L a = a L r r = L r L r
Classes and conversions Regular expressions Syntax: r = ε a r r r + r r Semantics: The language L r of a regular expression r is inductively defined as follows: L =, L ε = {ε}, L a = a L r r = L r L r
Peled, Vardi, & Yannakakis: Black Box Checking
 Peled, Vardi, & Yannakakis: Black Box Checking Martin Leucker leucker@it.uu.se Department of Computer Systems,, Sweden Plan Preliminaries State identification and verification Conformance Testing Extended
Peled, Vardi, & Yannakakis: Black Box Checking Martin Leucker leucker@it.uu.se Department of Computer Systems,, Sweden Plan Preliminaries State identification and verification Conformance Testing Extended
Finite Automata Theory and Formal Languages TMV027/DIT321 LP4 2018
 Finite Automata Theory and Formal Languages TMV027/DIT321 LP4 2018 Lecture 4 Ana Bove March 23rd 2018 Recap: Formal Proofs How formal should a proof be? Depends on its purpose...... but should be convincing......
Finite Automata Theory and Formal Languages TMV027/DIT321 LP4 2018 Lecture 4 Ana Bove March 23rd 2018 Recap: Formal Proofs How formal should a proof be? Depends on its purpose...... but should be convincing......
Introduction to Formal Languages, Automata and Computability p.1/51
 Introduction to Formal Languages, Automata and Computability Finite State Automata K. Krithivasan and R. Rama Introduction to Formal Languages, Automata and Computability p.1/51 Introduction As another
Introduction to Formal Languages, Automata and Computability Finite State Automata K. Krithivasan and R. Rama Introduction to Formal Languages, Automata and Computability p.1/51 Introduction As another