DIGITAL CONTROL OF POWER CONVERTERS. 3 Digital controller design
|
|
|
- Hester Patterson
- 6 years ago
- Views:
Transcription
1 DIGITAL CONTROL OF POWER CONVERTERS 3 Digital controller design
2 Frequency response of discrete systems H(z) Properties: z e j T s 1 DC Gain z=1 H(1)=DC 2 Periodic nature j Ts z e jt e s cos( jt ) j sin( jt ) s 3 Symmetry jts jt jts jts s H( e ) H( e ) H( e ) H( e ) jts jts H ( e ) H ( e ) s 2
3 Frequency response of discrete systems 1 DC Gain 2 Periodic nature 3 Symmetry 1 3 Symmetry 2 -Fs/2 0 Fs/2 Fs/2 3
![Matlab commands for frequency response >> Num = [1 0]; >> Den = [1-1] >> gz = tf(num, den, 0.2) g num( z) den( z) Ts 0.](/docs-images/77/75723327/images/4-3.jpg "2 g z z 1 Ts 0.")
4 Matlab commands for frequency response >> Num = [1 0]; >> Den = [1-1] >> gz = tf(num, den, 0.2) g num( z) den( z) Ts 0.2 g z z 1 Ts 0.2 >> bode(gz) // alternative >> [M, P, w] = bode(gz, w) >> nyquist(gz) // alternative >> [Real, Imag, w] = nyquist(gz, w) 4
5 Discretization of a continous function
6 DAC, Analog Subsystem, and ADC Combination Transfer Function The impulse response is 6
7 DAC, Analog Subsystem, and ADC Combination Transfer Function g s (t) -g s (t-t) g s (T)-g s (t-t) 7
8 PWM, Analog Subsystem, and ADC Combination Transfer Function d k PWM positive step at kt negative step at kt + d k T g s (t) g s (T)-g s (t-d k T) -g s (t-d k T) 8

G ZAS (z) has no zeros on or")
G ZAS (z) has no")
9 stability of digitally controlled systems 1. The characteristic polynomial 1 + C(z)G ZAS (z) has no zeros on or outside the unit circle. 2. The loop gain C(z)G ZAS (z) has no pole-zero cancellation on or outside the unit circle. 9
10 stability determination (matlab) >> den=[2 1 0]; >> gz=tf(1,den,0.1) Transfer function: z^2 + z >> roots(den) // where den is a vector with the denominator coefficients >> zpk(gz) // factorizes the numerator and denominator of the transfer function gz Zero/pole/gain: z (z+0.5) 10
11 Nyquist criterion >> nyquist(gd) % Nyquist plot >> bode(gd) % Bode plot It is also possible to find the gain and phase margins with the command >> [gm,pm] = margin(gd) An alternative form of the command is >> margin(gd) Z = N + P If G ZAS is stable Stability is assured if R G does not enclosed -1 11
12 Direct z-domain Digital Controller Design Obtaining digital controllers from analog designs involves approximation that may result in significant controller distortion the locations of the controller poles and zeros are often restricted to subsets of the unit circle (s + a) [z (c a)/(c + a)] c=1/2 if a <1/2 This yields only RHP zeros because a is almost always smaller than c 12
13 Direct z-domain design Root locus
14 Direct z-domain Digital Controller Design 1+KL(z)=1 Root locus Magnitude condition K L(z) = 1 Angle condition L(z) = ±(2m + 1)180, m = 0,1,2, The number of root locus branches is equal to the number of open-loop poles of L(s). 2. The root locus branches start at the open-loop poles and end at the open loop zeros or at infinity. 3. The real axis root loci have an odd number of poles plus zeros to their right. 4. The branches going to infinity asymptotically approach the straight lines defined by the angle 5. Breakaway points (points of departure from the real axis) correspond to local maxima of K, whereas break-in points (points of arrival at the real axis) correspond to local minima of K. 6. The angle of departure from a complex pole pn is given by 14
 Settling time.")
 1")
15 Root locus design Translate time domain info into dominant poles (frequency domain) Settling time. The settling time is defined as the period after which the envelope of the sampled waveform stays within a specified percentage (usually 1 to 2%) 1 Overshoot 0.6 % overshoot (1 ) 100 t s 4 n 2 s s 2 1 n n 15
")
16 Root locus design Overshoot vs phase margin Translate time domain info into dominant poles (frequency domain) 16
17 Root locus p /T 0.5 p /T 0.4 p /T p /T 0.9 p /T 0.7 p /T p /T p /T 0.1 p /T n =cte =cte 0 p /T p /T p /T 0.1 p /T p /T 0.7 p /T 0.3 p /T 0.2 p /T MATLAB >>zgrid 0.6 p /T 0.4 p /T 0.5 p /T
18 Example 1 Design a discrete controller for the antenna system Ts = 1s overshoot 16% ts < 10 s (ten samples) Gs () 1 s(10s 1) overshoot 16% >0,5 PM>50º ts < 10 s n > 0,9 (/2pi) fc = 0,15 Hz >> Gs = tf([1],[10 1 0]) // generates the transfer function >> Gz=c2d(Gs,1, zoh ) // discretizes Gs with Ts = 1s and zoh >> sisotool (z ) (z-1) (z ) 18

19 Example 1 Original design PM =9º 19
20 Example 1 Original design add a pole to make it causal cancel this pole with a zero PM =9º 20
21 Example 1 Controller design drag the gain to obtain PM=50º bandwidth = 0,1 Hz 21
22 Example 1 Controller design 22
23 Example 1 Controller design If we move this pole to the left (this can only be done in root locus) 23

24 Example 1 Controller design PM=50º bandwidth = 0,16 Hz The phase increases and allows pushing the frequency 24

25 Example 1 Controller design PM=50º bandwidth = 0,16 Hz PM=60º bandwidth = 0,13 Hz just moving the gain 25
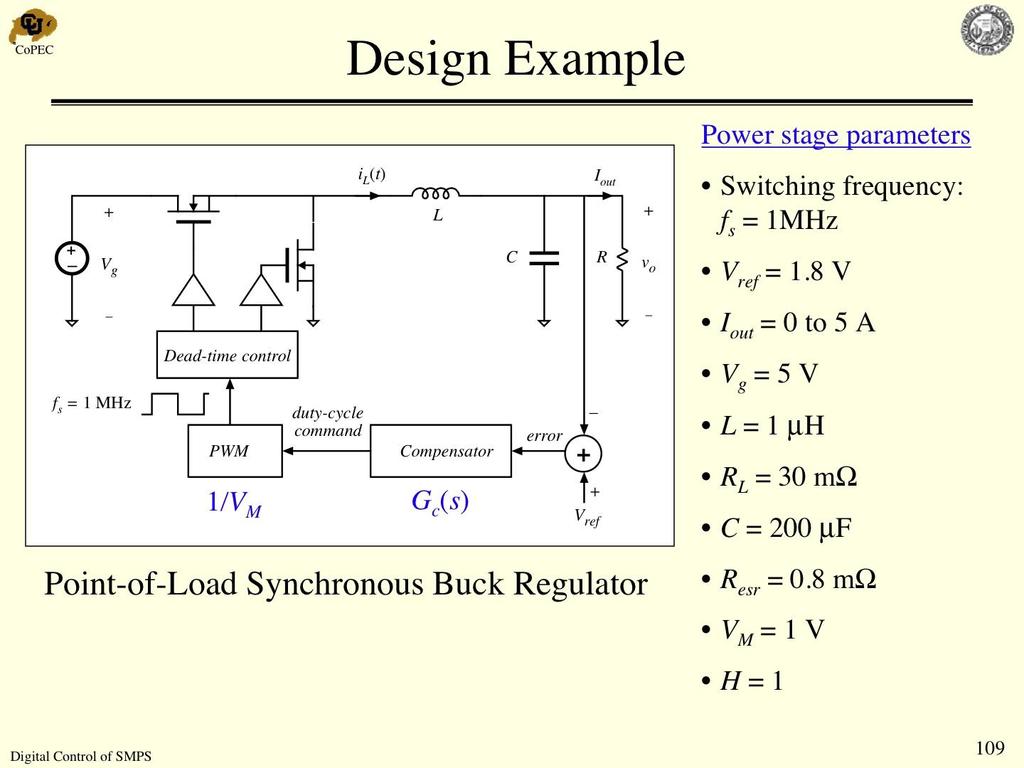
26 Example 2 Flyback converter a p c Ve L Co R PWM
27 Fase Módulo Discrete Controller design Converter data Vg= 15V-30V Ls = 20uH Vo = 5v R = 1 C = 600u Resr = 20 m n1:n2 = 2:1 Objective Design the best controller Respuesta en Frecuencia Control-Salida Frecuencia Respuesta en Frecuencia Control-Salida f_rhz = 6.9 khz Frecuencia f_esr = 13.3 khz f_res = 846 Hz 27

28 30 Vin dil L vin d vo (1 d) dt dvc C il (1 d) i dt Converter modelling in Simuling (averaged) o ic v v R ( i (1 d) i ) o C ESR L o -K- Resr Vo Product Gain _L 1 s Integrator _L Product 1 2/1 Trafo _1 ic -K- -K- Gain _C 1 s Vc Integrator _C d 1/1.25 d 1-d G_Rload duty 1 Product 2 2/1 Trafo _2 cte 28
29 add linearization point (input port) to the duty cycle add linearization point (output port) to the output voltage 29


30 Then Tools Control Design linear analysis 30

31 calculate the operating point (default states =0) select Bode plot calculate new operating point 31


32 New operating point Compute operating point 32
33 select the new operating point linearize the model 33

34 default operating point 2nd order with correct operating point RHPZ 34

35 select the correct model export to 35

36 >> flyback_z=c2d(flyback,10e-6,'zoh') >> sisotool Poles discretized flyback converter RHPZ ESRZero 36
 add additional pole (to make it causal) 37")
37 1) add integrator 2) place complex conjugates 3) add additional pole (to make it causal) 37

38 Another way design the compensator from simulink take care about operating point!!! 38
39 Direct z-domain Digital Controller Design
40 Direct z-domain Digital Controller Design Direct Control Design Desired closed loop transfer function The controller is: For a causal controller, the closed-loop transfer function Gcl(z) must have the same pole-zero deficit as GZAS(z). In other words, the delay in Gcl(z) must be at least as long as the delay in GZAS(z) 40
41 Direct z-domain Digital Controller Design Controller requirements Causality: the closed-loop transfer function Gcl(z) must have the same pole-zero deficit as G ZAS (z). In other words, the delay in Gcl(z) must be at least as long as the delay in G ZAS (z) Avoid unstable pole-zero cancellations. This implies that the set of zeros of Gcl(z) must include all the zeros of G ZAS (z) that are outside the unit circle. The zeros of 1 Gcl(z) must include all the poles of G ZAS (z) that are outside the unit circle (stability). zero steady-state error: Gcl(1)=1 Note: The choice of a suitable closed-loop transfer function is clearly the main obstacle in the application of the direct design method. The correct choice of closed-loop poles and zeros to meet the design requirements is difficult for higher order systems. In practice, there are additional constraints on the control variable because of actuator limitations. Further, the performance of the control system relies heavily on an accurate process model. 41
 = z k k must be greater than or equal to the intrinsic delay of the discretized process 42")
42 Direct z-domain Digital Controller Design Finite settling time (dead-beat controller) if all the poles and zeros of the discrete-time process are inside the unit circle, an attractive choice can be to select Gcl(z) = z k k must be greater than or equal to the intrinsic delay of the discretized process 42


43 Finite settling time Example Ts = 0.1 u output actual analog output To avoid intersample oscillations: maintain the control variable constant after n samples, where n is the degree of the denominator of the discretized process 43
44 44
45 45
 d(z) R(z) n k n 1 k 1 m k m 1 k 1 k 0 k d a... d a e b.")
46 Implementation of the controller x k x k-1 x k-m X b 0 X b 1 X b m y k y k-1 y k-n X a 1 X a n y k n n m m z a... z a z a a z b... z b z b b e(z) d(z) R(z) n k n 1 k 1 m k m 1 k 1 k 0 k d a... d a e b... e b e b d The transfer function R(z) is not implemented, but its equivalent difference equation TF Difference equation (a 0 =1 for normalization)
47 2.6. Canonical form Half memory elements e K R 1 R 2 Z -1 b o dk Half registers (in FPGAs or ASICs) Half variables (in DSPs or Cs) Z -1 b 1 a 1 Z -1 e K R 1 (z) R 2 (z) Y K Z -1 b 2 a 2 Higher values in the registers (more bits) e K b o d K Z -1 a 1 b 1 Z -1 47
48 2.6. Delta transform (I) Y k X k X b o k1 X T k Xk A X s k B U k Difference equation 1 z T 1 b 1 b m e(z) h(z) u(z) a 1 Numerical robustness a 2 a m Less bits are necessary a n More adders X k 1 Y k T z 1 z 1 1 Y k -1 (Integral) Digital implementation T Z
49 2.6. Delta transform (II) Taking out the T multiplier of -1 into the coefficients Adapted -1 Digital implementation -1 b o + Z -1 a 1 T T b 1 a 2 T 2-1 T 2 T n T n b 2 b o is eliminated if order (den) > order (num) The new coefficients are T i a i, T i b i a n =0 if K i 0 (integral action) 49
50 2.6. Order(den) > Orden(num) Really convenient for practical implementation, especially for high f SAMP If order (den) = order (num) d k = b o e k + Duty cycle must be changed (theoretically) at the same time a new sample is received, with a sampled period of (theoretically) 0 ns. If order (den) > order (num) d k = b 1 e k-1 + We have a full cycle for all the process sampling period processing e k-1 is requested e k-1 is available T d k is imposed 50
51 Word length (Number of bits) Coefficients & variables are implemented using fixed point format FPGAs &ASICs allow using any number of bits 1.56 for each variable 1.54 DSPs & Cs use multiples of 8/ Floating point demands too many resources and processing time v o v o allows less number of bits Ideal (floating point) -1 using 8-bits z -1 using 8-bits Low number of bits big differences between ideal model & practical implementation x x 10-4 Matlab fixed-point toolbox 51
Digital Control Systems
 Digital Control Systems Lecture Summary #4 This summary discussed some graphical methods their use to determine the stability the stability margins of closed loop systems. A. Nyquist criterion Nyquist
Digital Control Systems Lecture Summary #4 This summary discussed some graphical methods their use to determine the stability the stability margins of closed loop systems. A. Nyquist criterion Nyquist
Step input, ramp input, parabolic input and impulse input signals. 2. What is the initial slope of a step response of a first order system?
 IC6501 CONTROL SYSTEM UNIT-II TIME RESPONSE PART-A 1. What are the standard test signals employed for time domain studies?(or) List the standard test signals used in analysis of control systems? (April
IC6501 CONTROL SYSTEM UNIT-II TIME RESPONSE PART-A 1. What are the standard test signals employed for time domain studies?(or) List the standard test signals used in analysis of control systems? (April
SECTION 5: ROOT LOCUS ANALYSIS
 SECTION 5: ROOT LOCUS ANALYSIS MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider a general feedback system: Closed loop transfer function is 1 is the forward path
SECTION 5: ROOT LOCUS ANALYSIS MAE 4421 Control of Aerospace & Mechanical Systems 2 Introduction Introduction 3 Consider a general feedback system: Closed loop transfer function is 1 is the forward path
EE451/551: Digital Control. Chapter 3: Modeling of Digital Control Systems
 EE451/551: Digital Control Chapter 3: Modeling of Digital Control Systems Common Digital Control Configurations AsnotedinCh1 commondigitalcontrolconfigurations As noted in Ch 1, common digital control
EE451/551: Digital Control Chapter 3: Modeling of Digital Control Systems Common Digital Control Configurations AsnotedinCh1 commondigitalcontrolconfigurations As noted in Ch 1, common digital control
Control Systems Engineering ( Chapter 8. Root Locus Techniques ) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Systems Engineering ( Chapter 8. Root Locus Techniques ) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Introduction In this lesson, you will learn the following : The
Control Systems Engineering ( Chapter 8. Root Locus Techniques ) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Introduction In this lesson, you will learn the following : The
7.4 STEP BY STEP PROCEDURE TO DRAW THE ROOT LOCUS DIAGRAM
 ROOT LOCUS TECHNIQUE. Values of on the root loci The value of at any point s on the root loci is determined from the following equation G( s) H( s) Product of lengths of vectors from poles of G( s)h( s)
ROOT LOCUS TECHNIQUE. Values of on the root loci The value of at any point s on the root loci is determined from the following equation G( s) H( s) Product of lengths of vectors from poles of G( s)h( s)
(b) A unity feedback system is characterized by the transfer function. Design a suitable compensator to meet the following specifications:
 A unity feedback system is characterized by the transfer function. Design a suitable compensator to meet the following specifications:") 1. (a) The open loop transfer function of a unity feedback control system is given by G(S) = K/S(1+0.1S)(1+S) (i) Determine the value of K so that the resonance peak M r of the system is equal to 1.4.
1. (a) The open loop transfer function of a unity feedback control system is given by G(S) = K/S(1+0.1S)(1+S) (i) Determine the value of K so that the resonance peak M r of the system is equal to 1.4.
DESIGN USING TRANSFORMATION TECHNIQUE CLASSICAL METHOD
 206 Spring Semester ELEC733 Digital Control System LECTURE 7: DESIGN USING TRANSFORMATION TECHNIQUE CLASSICAL METHOD For a unit ramp input Tz Ez ( ) 2 ( z ) D( z) G( z) Tz e( ) lim( z) z 2 ( z ) D( z)
206 Spring Semester ELEC733 Digital Control System LECTURE 7: DESIGN USING TRANSFORMATION TECHNIQUE CLASSICAL METHOD For a unit ramp input Tz Ez ( ) 2 ( z ) D( z) G( z) Tz e( ) lim( z) z 2 ( z ) D( z)
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING
 KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING QUESTION BANK SUB.NAME : CONTROL SYSTEMS BRANCH : ECE YEAR : II SEMESTER: IV 1. What is control system? 2. Define open
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING QUESTION BANK SUB.NAME : CONTROL SYSTEMS BRANCH : ECE YEAR : II SEMESTER: IV 1. What is control system? 2. Define open
EE402 - Discrete Time Systems Spring Lecture 10
 EE402 - Discrete Time Systems Spring 208 Lecturer: Asst. Prof. M. Mert Ankarali Lecture 0.. Root Locus For continuous time systems the root locus diagram illustrates the location of roots/poles of a closed
EE402 - Discrete Time Systems Spring 208 Lecturer: Asst. Prof. M. Mert Ankarali Lecture 0.. Root Locus For continuous time systems the root locus diagram illustrates the location of roots/poles of a closed
CYBER EXPLORATION LABORATORY EXPERIMENTS
 CYBER EXPLORATION LABORATORY EXPERIMENTS 1 2 Cyber Exploration oratory Experiments Chapter 2 Experiment 1 Objectives To learn to use MATLAB to: (1) generate polynomial, (2) manipulate polynomials, (3)
CYBER EXPLORATION LABORATORY EXPERIMENTS 1 2 Cyber Exploration oratory Experiments Chapter 2 Experiment 1 Objectives To learn to use MATLAB to: (1) generate polynomial, (2) manipulate polynomials, (3)
Digital Control System Models. M. Sami Fadali Professor of Electrical Engineering University of Nevada
 Digital Control System Models M. Sami Fadali Professor of Electrical Engineering University of Nevada 1 Outline Model of ADC. Model of DAC. Model of ADC, analog subsystem and DAC. Systems with transport
Digital Control System Models M. Sami Fadali Professor of Electrical Engineering University of Nevada 1 Outline Model of ADC. Model of DAC. Model of ADC, analog subsystem and DAC. Systems with transport
a. Closed-loop system; b. equivalent transfer function Then the CLTF () T is s the poles of () T are s from a contribution of a
 T is s the poles of () T are s from a contribution of a") Root Locus Simple definition Locus of points on the s- plane that represents the poles of a system as one or more parameter vary. RL and its relation to poles of a closed loop system RL and its relation
Root Locus Simple definition Locus of points on the s- plane that represents the poles of a system as one or more parameter vary. RL and its relation to poles of a closed loop system RL and its relation
ECE 486 Control Systems
 ECE 486 Control Systems Spring 208 Midterm #2 Information Issued: April 5, 208 Updated: April 8, 208 ˆ This document is an info sheet about the second exam of ECE 486, Spring 208. ˆ Please read the following
ECE 486 Control Systems Spring 208 Midterm #2 Information Issued: April 5, 208 Updated: April 8, 208 ˆ This document is an info sheet about the second exam of ECE 486, Spring 208. ˆ Please read the following
EC CONTROL SYSTEM UNIT I- CONTROL SYSTEM MODELING
 EC 2255 - CONTROL SYSTEM UNIT I- CONTROL SYSTEM MODELING 1. What is meant by a system? It is an arrangement of physical components related in such a manner as to form an entire unit. 2. List the two types
EC 2255 - CONTROL SYSTEM UNIT I- CONTROL SYSTEM MODELING 1. What is meant by a system? It is an arrangement of physical components related in such a manner as to form an entire unit. 2. List the two types
R a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies.
 Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies.") SET - 1 II B. Tech II Semester Supplementary Examinations Dec 01 1. a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies..
SET - 1 II B. Tech II Semester Supplementary Examinations Dec 01 1. a) Compare open loop and closed loop control systems. b) Clearly bring out, from basics, Force-current and Force-Voltage analogies..
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Root Locus
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Chapter 7. Digital Control Systems
 Chapter 7 Digital Control Systems 1 1 Introduction In this chapter, we introduce analysis and design of stability, steady-state error, and transient response for computer-controlled systems. Transfer functions,
Chapter 7 Digital Control Systems 1 1 Introduction In this chapter, we introduce analysis and design of stability, steady-state error, and transient response for computer-controlled systems. Transfer functions,
LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM I LAB EE 593
 LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM I LAB EE 593 ELECTRICAL ENGINEERING DEPARTMENT JIS COLLEGE OF ENGINEERING (AN AUTONOMOUS INSTITUTE) KALYANI, NADIA CONTROL SYSTEM I LAB. MANUAL EE 593 EXPERIMENT
LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM I LAB EE 593 ELECTRICAL ENGINEERING DEPARTMENT JIS COLLEGE OF ENGINEERING (AN AUTONOMOUS INSTITUTE) KALYANI, NADIA CONTROL SYSTEM I LAB. MANUAL EE 593 EXPERIMENT
ECE 345 / ME 380 Introduction to Control Systems Lecture Notes 8
 Learning Objectives ECE 345 / ME 380 Introduction to Control Systems Lecture Notes 8 Dr. Oishi oishi@unm.edu November 2, 203 State the phase and gain properties of a root locus Sketch a root locus, by
Learning Objectives ECE 345 / ME 380 Introduction to Control Systems Lecture Notes 8 Dr. Oishi oishi@unm.edu November 2, 203 State the phase and gain properties of a root locus Sketch a root locus, by
Outline. Classical Control. Lecture 1
 Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
Outline Outline Outline 1 Introduction 2 Prerequisites Block diagram for system modeling Modeling Mechanical Electrical Outline Introduction Background Basic Systems Models/Transfers functions 1 Introduction
School of Mechanical Engineering Purdue University. DC Motor Position Control The block diagram for position control of the servo table is given by:
 Root Locus Motivation Sketching Root Locus Examples ME375 Root Locus - 1 Servo Table Example DC Motor Position Control The block diagram for position control of the servo table is given by: θ D 0.09 See
Root Locus Motivation Sketching Root Locus Examples ME375 Root Locus - 1 Servo Table Example DC Motor Position Control The block diagram for position control of the servo table is given by: θ D 0.09 See
6.1 Sketch the z-domain root locus and find the critical gain for the following systems K., the closed-loop characteristic equation is K + z 0.
 6. Sketch the z-domain root locus and find the critical gain for the following systems K (i) Gz () z 4. (ii) Gz K () ( z+ 9. )( z 9. ) (iii) Gz () Kz ( z. )( z ) (iv) Gz () Kz ( + 9. ) ( z. )( z 8. ) (i)
6. Sketch the z-domain root locus and find the critical gain for the following systems K (i) Gz () z 4. (ii) Gz K () ( z+ 9. )( z 9. ) (iii) Gz () Kz ( z. )( z ) (iv) Gz () Kz ( + 9. ) ( z. )( z 8. ) (i)
Example on Root Locus Sketching and Control Design
 Example on Root Locus Sketching and Control Design MCE44 - Spring 5 Dr. Richter April 25, 25 The following figure represents the system used for controlling the robotic manipulator of a Mars Rover. We
Example on Root Locus Sketching and Control Design MCE44 - Spring 5 Dr. Richter April 25, 25 The following figure represents the system used for controlling the robotic manipulator of a Mars Rover. We
INTRODUCTION TO DIGITAL CONTROL
 ECE4540/5540: Digital Control Systems INTRODUCTION TO DIGITAL CONTROL.: Introduction In ECE450/ECE550 Feedback Control Systems, welearnedhow to make an analog controller D(s) to control a linear-time-invariant
ECE4540/5540: Digital Control Systems INTRODUCTION TO DIGITAL CONTROL.: Introduction In ECE450/ECE550 Feedback Control Systems, welearnedhow to make an analog controller D(s) to control a linear-time-invariant
Control Systems I. Lecture 7: Feedback and the Root Locus method. Readings: Jacopo Tani. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 2, 2018 J. Tani, E. Frazzoli (ETH) Lecture 7:
Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 2, 2018 J. Tani, E. Frazzoli (ETH) Lecture 7:
Table of Laplacetransform
 Appendix Table of Laplacetransform pairs 1(t) f(s) oct), unit impulse at t = 0 a, a constant or step of magnitude a at t = 0 a s t, a ramp function e- at, an exponential function s + a sin wt, a sine fun
Appendix Table of Laplacetransform pairs 1(t) f(s) oct), unit impulse at t = 0 a, a constant or step of magnitude a at t = 0 a s t, a ramp function e- at, an exponential function s + a sin wt, a sine fun
Course roadmap. Step response for 2nd-order system. Step response for 2nd-order system
 ME45: Control Systems Lecture Time response of nd-order systems Prof. Clar Radcliffe and Prof. Jongeun Choi Department of Mechanical Engineering Michigan State University Modeling Laplace transform Transfer
ME45: Control Systems Lecture Time response of nd-order systems Prof. Clar Radcliffe and Prof. Jongeun Choi Department of Mechanical Engineering Michigan State University Modeling Laplace transform Transfer
1 x(k +1)=(Φ LH) x(k) = T 1 x 2 (k) x1 (0) 1 T x 2(0) T x 1 (0) x 2 (0) x(1) = x(2) = x(3) =
=(Φ LH) x(k) = T 1 x 2 (k) x1 (0) 1 T x 2(0) T x 1 (0) x 2 (0) x(1) = x(2) = x(3) =") 567 This is often referred to as Þnite settling time or deadbeat design because the dynamics will settle in a Þnite number of sample periods. This estimator always drives the error to zero in time 2T or
567 This is often referred to as Þnite settling time or deadbeat design because the dynamics will settle in a Þnite number of sample periods. This estimator always drives the error to zero in time 2T or
1 (20 pts) Nyquist Exercise
 Nyquist Exercise") EE C128 / ME134 Problem Set 6 Solution Fall 2011 1 (20 pts) Nyquist Exercise Consider a close loop system with unity feedback. For each G(s), hand sketch the Nyquist diagram, determine Z = P N, algebraically
EE C128 / ME134 Problem Set 6 Solution Fall 2011 1 (20 pts) Nyquist Exercise Consider a close loop system with unity feedback. For each G(s), hand sketch the Nyquist diagram, determine Z = P N, algebraically
Discrete Systems. Step response and pole locations. Mark Cannon. Hilary Term Lecture
 Discrete Systems Mark Cannon Hilary Term 22 - Lecture 4 Step response and pole locations 4 - Review Definition of -transform: U() = Z{u k } = u k k k= Discrete transfer function: Y () U() = G() = Z{g k},
Discrete Systems Mark Cannon Hilary Term 22 - Lecture 4 Step response and pole locations 4 - Review Definition of -transform: U() = Z{u k } = u k k k= Discrete transfer function: Y () U() = G() = Z{g k},
Software Engineering 3DX3. Slides 8: Root Locus Techniques
 Software Engineering 3DX3 Slides 8: Root Locus Techniques Dr. Ryan Leduc Department of Computing and Software McMaster University Material based on Control Systems Engineering by N. Nise. c 2006, 2007
Software Engineering 3DX3 Slides 8: Root Locus Techniques Dr. Ryan Leduc Department of Computing and Software McMaster University Material based on Control Systems Engineering by N. Nise. c 2006, 2007
MAS107 Control Theory Exam Solutions 2008
 MAS07 CONTROL THEORY. HOVLAND: EXAM SOLUTION 2008 MAS07 Control Theory Exam Solutions 2008 Geir Hovland, Mechatronics Group, Grimstad, Norway June 30, 2008 C. Repeat question B, but plot the phase curve
MAS07 CONTROL THEORY. HOVLAND: EXAM SOLUTION 2008 MAS07 Control Theory Exam Solutions 2008 Geir Hovland, Mechatronics Group, Grimstad, Norway June 30, 2008 C. Repeat question B, but plot the phase curve
Inverted Pendulum. Objectives
 Inverted Pendulum Objectives The objective of this lab is to experiment with the stabilization of an unstable system. The inverted pendulum problem is taken as an example and the animation program gives
Inverted Pendulum Objectives The objective of this lab is to experiment with the stabilization of an unstable system. The inverted pendulum problem is taken as an example and the animation program gives
Controls Problems for Qualifying Exam - Spring 2014
 Controls Problems for Qualifying Exam - Spring 2014 Problem 1 Consider the system block diagram given in Figure 1. Find the overall transfer function T(s) = C(s)/R(s). Note that this transfer function
Controls Problems for Qualifying Exam - Spring 2014 Problem 1 Consider the system block diagram given in Figure 1. Find the overall transfer function T(s) = C(s)/R(s). Note that this transfer function
DIGITAL CONTROLLER DESIGN
 ECE4540/5540: Digital Control Systems 5 DIGITAL CONTROLLER DESIGN 5.: Direct digital design: Steady-state accuracy We have spent quite a bit of time discussing digital hybrid system analysis, and some
ECE4540/5540: Digital Control Systems 5 DIGITAL CONTROLLER DESIGN 5.: Direct digital design: Steady-state accuracy We have spent quite a bit of time discussing digital hybrid system analysis, and some
SECTION 8: ROOT-LOCUS ANALYSIS. ESE 499 Feedback Control Systems
 SECTION 8: ROOT-LOCUS ANALYSIS ESE 499 Feedback Control Systems 2 Introduction Introduction 3 Consider a general feedback system: Closed-loop transfer function is KKKK ss TT ss = 1 + KKKK ss HH ss GG ss
SECTION 8: ROOT-LOCUS ANALYSIS ESE 499 Feedback Control Systems 2 Introduction Introduction 3 Consider a general feedback system: Closed-loop transfer function is KKKK ss TT ss = 1 + KKKK ss HH ss GG ss
Frequency Response Techniques
 4th Edition T E N Frequency Response Techniques SOLUTION TO CASE STUDY CHALLENGE Antenna Control: Stability Design and Transient Performance First find the forward transfer function, G(s). Pot: K 1 = 10
4th Edition T E N Frequency Response Techniques SOLUTION TO CASE STUDY CHALLENGE Antenna Control: Stability Design and Transient Performance First find the forward transfer function, G(s). Pot: K 1 = 10
LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM II LAB EE 693
 LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM II LAB EE 693 ELECTRICAL ENGINEERING DEPARTMENT JIS COLLEGE OF ENGINEERING (AN AUTONOMOUS INSTITUTE) KALYANI, NADIA EXPERIMENT NO : CS II/ TITLE : FAMILIARIZATION
LABORATORY INSTRUCTION MANUAL CONTROL SYSTEM II LAB EE 693 ELECTRICAL ENGINEERING DEPARTMENT JIS COLLEGE OF ENGINEERING (AN AUTONOMOUS INSTITUTE) KALYANI, NADIA EXPERIMENT NO : CS II/ TITLE : FAMILIARIZATION
CHAPTER 1 Basic Concepts of Control System. CHAPTER 6 Hydraulic Control System
 CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
Problems -X-O («) s-plane. s-plane *~8 -X -5. id) X s-plane. s-plane. -* Xtg) FIGURE P8.1. j-plane. JO) k JO)
 s-plane. s-plane *~8 -X -5. id) X s-plane. s-plane. -* Xtg) FIGURE P8.1. j-plane. JO) k JO)") Problems 1. For each of the root loci shown in Figure P8.1, tell whether or not the sketch can be a root locus. If the sketch cannot be a root locus, explain why. Give all reasons. [Section: 8.4] *~8 -X-O
Problems 1. For each of the root loci shown in Figure P8.1, tell whether or not the sketch can be a root locus. If the sketch cannot be a root locus, explain why. Give all reasons. [Section: 8.4] *~8 -X-O
Lecture 14 - Using the MATLAB Control System Toolbox and Simulink Friday, February 8, 2013
 Today s Objectives ENGR 105: Feedback Control Design Winter 2013 Lecture 14 - Using the MATLAB Control System Toolbox and Simulink Friday, February 8, 2013 1. introduce the MATLAB Control System Toolbox
Today s Objectives ENGR 105: Feedback Control Design Winter 2013 Lecture 14 - Using the MATLAB Control System Toolbox and Simulink Friday, February 8, 2013 1. introduce the MATLAB Control System Toolbox
ESE319 Introduction to Microelectronics. Feedback Basics
 Feedback Basics Stability Feedback concept Feedback in emitter follower One-pole feedback and root locus Frequency dependent feedback and root locus Gain and phase margins Conditions for closed loop stability
Feedback Basics Stability Feedback concept Feedback in emitter follower One-pole feedback and root locus Frequency dependent feedback and root locus Gain and phase margins Conditions for closed loop stability
Control System Design
 ELEC4410 Control System Design Lecture 19: Feedback from Estimated States and Discrete-Time Control Design Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science
ELEC4410 Control System Design Lecture 19: Feedback from Estimated States and Discrete-Time Control Design Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science
IC6501 CONTROL SYSTEMS
 DHANALAKSHMI COLLEGE OF ENGINEERING CHENNAI DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEMESTER: II/IV IC6501 CONTROL SYSTEMS UNIT I SYSTEMS AND THEIR REPRESENTATION 1. What is the mathematical
DHANALAKSHMI COLLEGE OF ENGINEERING CHENNAI DEPARTMENT OF ELECTRICAL AND ELECTRONICS ENGINEERING YEAR/SEMESTER: II/IV IC6501 CONTROL SYSTEMS UNIT I SYSTEMS AND THEIR REPRESENTATION 1. What is the mathematical
Module 6: Deadbeat Response Design Lecture Note 1
 Module 6: Deadbeat Response Design Lecture Note 1 1 Design of digital control systems with dead beat response So far we have discussed the design methods which are extensions of continuous time design
Module 6: Deadbeat Response Design Lecture Note 1 1 Design of digital control systems with dead beat response So far we have discussed the design methods which are extensions of continuous time design
CONTROL * ~ SYSTEMS ENGINEERING
 CONTROL * ~ SYSTEMS ENGINEERING H Fourth Edition NormanS. Nise California State Polytechnic University, Pomona JOHN WILEY& SONS, INC. Contents 1. Introduction 1 1.1 Introduction, 2 1.2 A History of Control
CONTROL * ~ SYSTEMS ENGINEERING H Fourth Edition NormanS. Nise California State Polytechnic University, Pomona JOHN WILEY& SONS, INC. Contents 1. Introduction 1 1.1 Introduction, 2 1.2 A History of Control
NADAR SARASWATHI COLLEGE OF ENGINEERING AND TECHNOLOGY Vadapudupatti, Theni
 NADAR SARASWATHI COLLEGE OF ENGINEERING AND TECHNOLOGY Vadapudupatti, Theni-625531 Question Bank for the Units I to V SE05 BR05 SU02 5 th Semester B.E. / B.Tech. Electrical & Electronics engineering IC6501
NADAR SARASWATHI COLLEGE OF ENGINEERING AND TECHNOLOGY Vadapudupatti, Theni-625531 Question Bank for the Units I to V SE05 BR05 SU02 5 th Semester B.E. / B.Tech. Electrical & Electronics engineering IC6501
Chapter 2. Classical Control System Design. Dutch Institute of Systems and Control
 Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
CHAPTER # 9 ROOT LOCUS ANALYSES
 F K א CHAPTER # 9 ROOT LOCUS ANALYSES 1. Introduction The basic characteristic of the transient response of a closed-loop system is closely related to the location of the closed-loop poles. If the system
F K א CHAPTER # 9 ROOT LOCUS ANALYSES 1. Introduction The basic characteristic of the transient response of a closed-loop system is closely related to the location of the closed-loop poles. If the system
Control Systems. University Questions
 University Questions UNIT-1 1. Distinguish between open loop and closed loop control system. Describe two examples for each. (10 Marks), Jan 2009, June 12, Dec 11,July 08, July 2009, Dec 2010 2. Write
University Questions UNIT-1 1. Distinguish between open loop and closed loop control system. Describe two examples for each. (10 Marks), Jan 2009, June 12, Dec 11,July 08, July 2009, Dec 2010 2. Write
Bangladesh University of Engineering and Technology. EEE 402: Control System I Laboratory
 Bangladesh University of Engineering and Technology Electrical and Electronic Engineering Department EEE 402: Control System I Laboratory Experiment No. 4 a) Effect of input waveform, loop gain, and system
Bangladesh University of Engineering and Technology Electrical and Electronic Engineering Department EEE 402: Control System I Laboratory Experiment No. 4 a) Effect of input waveform, loop gain, and system
Feedback Control of Linear SISO systems. Process Dynamics and Control
 Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Feedback design for the Buck Converter
 Feedback design for the Buck Converter Portland State University Department of Electrical and Computer Engineering Portland, Oregon, USA December 30, 2009 Abstract In this paper we explore two compensation
Feedback design for the Buck Converter Portland State University Department of Electrical and Computer Engineering Portland, Oregon, USA December 30, 2009 Abstract In this paper we explore two compensation
SAMPLE SOLUTION TO EXAM in MAS501 Control Systems 2 Autumn 2015
 FACULTY OF ENGINEERING AND SCIENCE SAMPLE SOLUTION TO EXAM in MAS501 Control Systems 2 Autumn 2015 Lecturer: Michael Ruderman Problem 1: Frequency-domain analysis and control design (15 pt) Given is a
FACULTY OF ENGINEERING AND SCIENCE SAMPLE SOLUTION TO EXAM in MAS501 Control Systems 2 Autumn 2015 Lecturer: Michael Ruderman Problem 1: Frequency-domain analysis and control design (15 pt) Given is a
If you need more room, use the backs of the pages and indicate that you have done so.
 EE 343 Exam II Ahmad F. Taha Spring 206 Your Name: Your Signature: Exam duration: hour and 30 minutes. This exam is closed book, closed notes, closed laptops, closed phones, closed tablets, closed pretty
EE 343 Exam II Ahmad F. Taha Spring 206 Your Name: Your Signature: Exam duration: hour and 30 minutes. This exam is closed book, closed notes, closed laptops, closed phones, closed tablets, closed pretty
Course roadmap. ME451: Control Systems. What is Root Locus? (Review) Characteristic equation & root locus. Lecture 18 Root locus: Sketch of proofs
 Characteristic equation & root locus. Lecture 18 Root locus: Sketch of proofs") ME451: Control Systems Modeling Course roadmap Analysis Design Lecture 18 Root locus: Sketch of proofs Dr. Jongeun Choi Department of Mechanical Engineering Michigan State University Laplace transform
ME451: Control Systems Modeling Course roadmap Analysis Design Lecture 18 Root locus: Sketch of proofs Dr. Jongeun Choi Department of Mechanical Engineering Michigan State University Laplace transform
Root Locus. Signals and Systems: 3C1 Control Systems Handout 3 Dr. David Corrigan Electronic and Electrical Engineering
 Root Locus Signals and Systems: 3C1 Control Systems Handout 3 Dr. David Corrigan Electronic and Electrical Engineering corrigad@tcd.ie Recall, the example of the PI controller car cruise control system.
Root Locus Signals and Systems: 3C1 Control Systems Handout 3 Dr. David Corrigan Electronic and Electrical Engineering corrigad@tcd.ie Recall, the example of the PI controller car cruise control system.
Distributed Real-Time Control Systems
 Distributed Real-Time Control Systems Chapter 9 Discrete PID Control 1 Computer Control 2 Approximation of Continuous Time Controllers Design Strategy: Design a continuous time controller C c (s) and then
Distributed Real-Time Control Systems Chapter 9 Discrete PID Control 1 Computer Control 2 Approximation of Continuous Time Controllers Design Strategy: Design a continuous time controller C c (s) and then
STABILITY ANALYSIS TECHNIQUES
 ECE4540/5540: Digital Control Systems 4 1 STABILITY ANALYSIS TECHNIQUES 41: Bilinear transformation Three main aspects to control-system design: 1 Stability, 2 Steady-state response, 3 Transient response
ECE4540/5540: Digital Control Systems 4 1 STABILITY ANALYSIS TECHNIQUES 41: Bilinear transformation Three main aspects to control-system design: 1 Stability, 2 Steady-state response, 3 Transient response
It is common to think and write in time domain. creating the mathematical description of the. Continuous systems- using Laplace or s-
 It is common to think and write in time domain quantities, but this is not the best thing to do in creating the mathematical description of the system we are dealing with. Continuous systems- using Laplace
It is common to think and write in time domain quantities, but this is not the best thing to do in creating the mathematical description of the system we are dealing with. Continuous systems- using Laplace
Alireza Mousavi Brunel University
 Alireza Mousavi Brunel University 1 » Control Process» Control Systems Design & Analysis 2 Open-Loop Control: Is normally a simple switch on and switch off process, for example a light in a room is switched
Alireza Mousavi Brunel University 1 » Control Process» Control Systems Design & Analysis 2 Open-Loop Control: Is normally a simple switch on and switch off process, for example a light in a room is switched
Course Outline. Closed Loop Stability. Stability. Amme 3500 : System Dynamics & Control. Nyquist Stability. Dr. Dunant Halim
 Amme 3 : System Dynamics & Control Nyquist Stability Dr. Dunant Halim Course Outline Week Date Content Assignment Notes 1 5 Mar Introduction 2 12 Mar Frequency Domain Modelling 3 19 Mar System Response
Amme 3 : System Dynamics & Control Nyquist Stability Dr. Dunant Halim Course Outline Week Date Content Assignment Notes 1 5 Mar Introduction 2 12 Mar Frequency Domain Modelling 3 19 Mar System Response
The output voltage is given by,
 71 The output voltage is given by, = (3.1) The inductor and capacitor values of the Boost converter are derived by having the same assumption as that of the Buck converter. Now the critical value of the
71 The output voltage is given by, = (3.1) The inductor and capacitor values of the Boost converter are derived by having the same assumption as that of the Buck converter. Now the critical value of the
Chapter 7 : Root Locus Technique
 Chapter 7 : Root Locus Technique By Electrical Engineering Department College of Engineering King Saud University 1431-143 7.1. Introduction 7.. Basics on the Root Loci 7.3. Characteristics of the Loci
Chapter 7 : Root Locus Technique By Electrical Engineering Department College of Engineering King Saud University 1431-143 7.1. Introduction 7.. Basics on the Root Loci 7.3. Characteristics of the Loci
Introduction to Root Locus. What is root locus?
 Introduction to Root Locus What is root locus? A graphical representation of the closed loop poles as a system parameter (Gain K) is varied Method of analysis and design for stability and transient response
Introduction to Root Locus What is root locus? A graphical representation of the closed loop poles as a system parameter (Gain K) is varied Method of analysis and design for stability and transient response
Laplace Transform Analysis of Signals and Systems
 Laplace Transform Analysis of Signals and Systems Transfer Functions Transfer functions of CT systems can be found from analysis of Differential Equations Block Diagrams Circuit Diagrams 5/10/04 M. J.
Laplace Transform Analysis of Signals and Systems Transfer Functions Transfer functions of CT systems can be found from analysis of Differential Equations Block Diagrams Circuit Diagrams 5/10/04 M. J.
Automatic Control Systems, 9th Edition
 Chapter 7: Root Locus Analysis Appendix E: Properties and Construction of the Root Loci Automatic Control Systems, 9th Edition Farid Golnaraghi, Simon Fraser University Benjamin C. Kuo, University of Illinois
Chapter 7: Root Locus Analysis Appendix E: Properties and Construction of the Root Loci Automatic Control Systems, 9th Edition Farid Golnaraghi, Simon Fraser University Benjamin C. Kuo, University of Illinois
Control Systems. EC / EE / IN. For
 Control Systems For EC / EE / IN By www.thegateacademy.com Syllabus Syllabus for Control Systems Basic Control System Components; Block Diagrammatic Description, Reduction of Block Diagrams. Open Loop
Control Systems For EC / EE / IN By www.thegateacademy.com Syllabus Syllabus for Control Systems Basic Control System Components; Block Diagrammatic Description, Reduction of Block Diagrams. Open Loop
 EC6405 - CONTROL SYSTEM ENGINEERING Questions and Answers Unit - I Control System Modeling Two marks 1. What is control system? A system consists of a number of components connected together to perform
EC6405 - CONTROL SYSTEM ENGINEERING Questions and Answers Unit - I Control System Modeling Two marks 1. What is control system? A system consists of a number of components connected together to perform
MAE 143B - Homework 9
 MAE 143B - Homework 9 7.1 a) We have stable first-order poles at p 1 = 1 and p 2 = 1. For small values of ω, we recover the DC gain K = lim ω G(jω) = 1 1 = 2dB. Having this finite limit, our straight-line
MAE 143B - Homework 9 7.1 a) We have stable first-order poles at p 1 = 1 and p 2 = 1. For small values of ω, we recover the DC gain K = lim ω G(jω) = 1 1 = 2dB. Having this finite limit, our straight-line
Control Systems I. Lecture 7: Feedback and the Root Locus method. Readings: Guzzella 9.1-3, Emilio Frazzoli
 Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Guzzella 9.1-3, 13.3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 3, 2017 E. Frazzoli (ETH)
Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Guzzella 9.1-3, 13.3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 3, 2017 E. Frazzoli (ETH)
Automatic Control (TSRT15): Lecture 4
: Lecture 4") Automatic Control (TSRT15): Lecture 4 Tianshi Chen Division of Automatic Control Dept. of Electrical Engineering Email: tschen@isy.liu.se Phone: 13-282226 Office: B-house extrance 25-27 Review of the last
Automatic Control (TSRT15): Lecture 4 Tianshi Chen Division of Automatic Control Dept. of Electrical Engineering Email: tschen@isy.liu.se Phone: 13-282226 Office: B-house extrance 25-27 Review of the last
ECE317 : Feedback and Control
 ECE317 : Feedback and Control Lecture : Routh-Hurwitz stability criterion Examples Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling
ECE317 : Feedback and Control Lecture : Routh-Hurwitz stability criterion Examples Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur
 VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203. DEPARTMENT OF ELECTRONICS & COMMUNICATION ENGINEERING SUBJECT QUESTION BANK : EC6405 CONTROL SYSTEM ENGINEERING SEM / YEAR: IV / II year
VALLIAMMAI ENGINEERING COLLEGE SRM Nagar, Kattankulathur 603 203. DEPARTMENT OF ELECTRONICS & COMMUNICATION ENGINEERING SUBJECT QUESTION BANK : EC6405 CONTROL SYSTEM ENGINEERING SEM / YEAR: IV / II year
Classify a transfer function to see which order or ramp it can follow and with which expected error.
 Dr. J. Tani, Prof. Dr. E. Frazzoli 5-059-00 Control Systems I (Autumn 208) Exercise Set 0 Topic: Specifications for Feedback Systems Discussion: 30.. 208 Learning objectives: The student can grizzi@ethz.ch,
Dr. J. Tani, Prof. Dr. E. Frazzoli 5-059-00 Control Systems I (Autumn 208) Exercise Set 0 Topic: Specifications for Feedback Systems Discussion: 30.. 208 Learning objectives: The student can grizzi@ethz.ch,
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering Dynamics and Control II Fall K(s +1)(s +2) G(s) =.
(s +2) G(s) =.") MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering. Dynamics and Control II Fall 7 Problem Set #7 Solution Posted: Friday, Nov., 7. Nise problem 5 from chapter 8, page 76. Answer:
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering. Dynamics and Control II Fall 7 Problem Set #7 Solution Posted: Friday, Nov., 7. Nise problem 5 from chapter 8, page 76. Answer:
Methods for analysis and control of dynamical systems Lecture 4: The root locus design method
 Methods for analysis and control of Lecture 4: The root locus design method O. Sename 1 1 Gipsa-lab, CNRS-INPG, FRANCE Olivier.Sename@gipsa-lab.inpg.fr www.gipsa-lab.fr/ o.sename 5th February 2015 Outline
Methods for analysis and control of Lecture 4: The root locus design method O. Sename 1 1 Gipsa-lab, CNRS-INPG, FRANCE Olivier.Sename@gipsa-lab.inpg.fr www.gipsa-lab.fr/ o.sename 5th February 2015 Outline
D G 2 H + + D 2
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.302 Feedback Systems Final Exam May 21, 2007 180 minutes Johnson Ice Rink 1. This examination consists
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Electrical Engineering and Computer Science 6.302 Feedback Systems Final Exam May 21, 2007 180 minutes Johnson Ice Rink 1. This examination consists
Chapter 9: Controller design
 Chapter 9. Controller Design 9.1. Introduction 9.2. Effect of negative feedback on the network transfer functions 9.2.1. Feedback reduces the transfer function from disturbances to the output 9.2.2. Feedback
Chapter 9. Controller Design 9.1. Introduction 9.2. Effect of negative feedback on the network transfer functions 9.2.1. Feedback reduces the transfer function from disturbances to the output 9.2.2. Feedback
MEM 355 Performance Enhancement of Dynamical Systems
 MEM 355 Performance Enhancement of Dynamical Systems Frequency Domain Design Intro Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University /5/27 Outline Closed Loop Transfer
MEM 355 Performance Enhancement of Dynamical Systems Frequency Domain Design Intro Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University /5/27 Outline Closed Loop Transfer
Digital Signal Processing
 COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
COMP ENG 4TL4: Digital Signal Processing Notes for Lecture #21 Friday, October 24, 2003 Types of causal FIR (generalized) linear-phase filters: Type I: Symmetric impulse response: with order M an even
1 An Overview and Brief History of Feedback Control 1. 2 Dynamic Models 23. Contents. Preface. xiii
 Contents 1 An Overview and Brief History of Feedback Control 1 A Perspective on Feedback Control 1 Chapter Overview 2 1.1 A Simple Feedback System 3 1.2 A First Analysis of Feedback 6 1.3 Feedback System
Contents 1 An Overview and Brief History of Feedback Control 1 A Perspective on Feedback Control 1 Chapter Overview 2 1.1 A Simple Feedback System 3 1.2 A First Analysis of Feedback 6 1.3 Feedback System
CONTROL SYSTEMS ENGINEERING Sixth Edition International Student Version
 CONTROL SYSTEMS ENGINEERING Sixth Edition International Student Version Norman S. Nise California State Polytechnic University, Pomona John Wiley fir Sons, Inc. Contents PREFACE, vii 1. INTRODUCTION, 1
CONTROL SYSTEMS ENGINEERING Sixth Edition International Student Version Norman S. Nise California State Polytechnic University, Pomona John Wiley fir Sons, Inc. Contents PREFACE, vii 1. INTRODUCTION, 1
Homework 7 - Solutions
 Homework 7 - Solutions Note: This homework is worth a total of 48 points. 1. Compensators (9 points) For a unity feedback system given below, with G(s) = K s(s + 5)(s + 11) do the following: (c) Find the
Homework 7 - Solutions Note: This homework is worth a total of 48 points. 1. Compensators (9 points) For a unity feedback system given below, with G(s) = K s(s + 5)(s + 11) do the following: (c) Find the
DIGITAL CONTROL OF POWER CONVERTERS. 2 Digital controller design
 DIGITAL CONTROL OF POWER CONVERTERS 2 Digital controller design Outline Review of frequency domain control design Performance limitations Discrete time system analysis and modeling Digital controller design
DIGITAL CONTROL OF POWER CONVERTERS 2 Digital controller design Outline Review of frequency domain control design Performance limitations Discrete time system analysis and modeling Digital controller design
ROOT LOCUS. Consider the system. Root locus presents the poles of the closed-loop system when the gain K changes from 0 to. H(s) H ( s) = ( s)
 H ( s) = ( s)") C1 ROOT LOCUS Consider the system R(s) E(s) C(s) + K G(s) - H(s) C(s) R(s) = K G(s) 1 + K G(s) H(s) Root locus presents the poles of the closed-loop system when the gain K changes from 0 to 1+ K G ( s)
C1 ROOT LOCUS Consider the system R(s) E(s) C(s) + K G(s) - H(s) C(s) R(s) = K G(s) 1 + K G(s) H(s) Root locus presents the poles of the closed-loop system when the gain K changes from 0 to 1+ K G ( s)
Control Systems I. Lecture 9: The Nyquist condition
 Control Systems I Lecture 9: The Nyquist condition adings: Guzzella, Chapter 9.4 6 Åstrom and Murray, Chapter 9.1 4 www.cds.caltech.edu/~murray/amwiki/index.php/first_edition Emilio Frazzoli Institute
Control Systems I Lecture 9: The Nyquist condition adings: Guzzella, Chapter 9.4 6 Åstrom and Murray, Chapter 9.1 4 www.cds.caltech.edu/~murray/amwiki/index.php/first_edition Emilio Frazzoli Institute
ECSE 4962 Control Systems Design. A Brief Tutorial on Control Design
 ECSE 4962 Control Systems Design A Brief Tutorial on Control Design Instructor: Professor John T. Wen TA: Ben Potsaid http://www.cat.rpi.edu/~wen/ecse4962s04/ Don t Wait Until The Last Minute! You got
ECSE 4962 Control Systems Design A Brief Tutorial on Control Design Instructor: Professor John T. Wen TA: Ben Potsaid http://www.cat.rpi.edu/~wen/ecse4962s04/ Don t Wait Until The Last Minute! You got
EE451/551: Digital Control. Final Exam Review Fall 2013
 EE45/55: Digital Control Final Exam Review Fall 03 Exam Overview The Final Exam will consist of four/five questions for EE45/55 students based on Chapters 7 and a bonus based on Chapters 8 9 (students
EE45/55: Digital Control Final Exam Review Fall 03 Exam Overview The Final Exam will consist of four/five questions for EE45/55 students based on Chapters 7 and a bonus based on Chapters 8 9 (students
Chapter 13 Digital Control
 Chapter 13 Digital Control Chapter 12 was concerned with building models for systems acting under digital control. We next turn to the question of control itself. Topics to be covered include: why one
Chapter 13 Digital Control Chapter 12 was concerned with building models for systems acting under digital control. We next turn to the question of control itself. Topics to be covered include: why one
Control Systems I Lecture 10: System Specifications
 Control Systems I Lecture 10: System Specifications Readings: Guzzella, Chapter 10 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 24, 2017 E. Frazzoli (ETH) Lecture
Control Systems I Lecture 10: System Specifications Readings: Guzzella, Chapter 10 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 24, 2017 E. Frazzoli (ETH) Lecture
Root locus Analysis. P.S. Gandhi Mechanical Engineering IIT Bombay. Acknowledgements: Mr Chaitanya, SYSCON 07
 Root locus Analysis P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: Mr Chaitanya, SYSCON 07 Recap R(t) + _ k p + k s d 1 s( s+ a) C(t) For the above system the closed loop transfer function
Root locus Analysis P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: Mr Chaitanya, SYSCON 07 Recap R(t) + _ k p + k s d 1 s( s+ a) C(t) For the above system the closed loop transfer function
Tutorial 4 (Week 11): Matlab - Digital Control Systems
: Matlab - Digital Control Systems") ELEC 3004 Systems: Signals & Controls Tutorial 4 (Week ): Matlab - Digital Control Systems The process of designing and analysing sampled-data systems is enhanced by the use of interactive computer tools
ELEC 3004 Systems: Signals & Controls Tutorial 4 (Week ): Matlab - Digital Control Systems The process of designing and analysing sampled-data systems is enhanced by the use of interactive computer tools
I What is root locus. I System analysis via root locus. I How to plot root locus. Root locus (RL) I Uses the poles and zeros of the OL TF
 I Uses the poles and zeros of the OL TF") EE C28 / ME C34 Feedback Control Systems Lecture Chapter 8 Root Locus Techniques Lecture abstract Alexandre Bayen Department of Electrical Engineering & Computer Science University of California Berkeley
EE C28 / ME C34 Feedback Control Systems Lecture Chapter 8 Root Locus Techniques Lecture abstract Alexandre Bayen Department of Electrical Engineering & Computer Science University of California Berkeley
Lab # 4 Time Response Analysis
 Islamic University of Gaza Faculty of Engineering Computer Engineering Dep. Feedback Control Systems Lab Eng. Tareq Abu Aisha Lab # 4 Lab # 4 Time Response Analysis What is the Time Response? It is an
Islamic University of Gaza Faculty of Engineering Computer Engineering Dep. Feedback Control Systems Lab Eng. Tareq Abu Aisha Lab # 4 Lab # 4 Time Response Analysis What is the Time Response? It is an
Root Locus Methods. The root locus procedure
 Root Locus Methods Design of a position control system using the root locus method Design of a phase lag compensator using the root locus method The root locus procedure To determine the value of the gain
Root Locus Methods Design of a position control system using the root locus method Design of a phase lag compensator using the root locus method The root locus procedure To determine the value of the gain
Control Systems I. Lecture 6: Poles and Zeros. Readings: Emilio Frazzoli. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 6: Poles and Zeros Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 27, 2017 E. Frazzoli (ETH) Lecture 6: Control Systems I 27/10/2017
Control Systems I Lecture 6: Poles and Zeros Readings: Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich October 27, 2017 E. Frazzoli (ETH) Lecture 6: Control Systems I 27/10/2017
Solutions to Skill-Assessment Exercises
 Solutions to Skill-Assessment Exercises To Accompany Control Systems Engineering 4 th Edition By Norman S. Nise John Wiley & Sons Copyright 2004 by John Wiley & Sons, Inc. All rights reserved. No part
Solutions to Skill-Assessment Exercises To Accompany Control Systems Engineering 4 th Edition By Norman S. Nise John Wiley & Sons Copyright 2004 by John Wiley & Sons, Inc. All rights reserved. No part
Exercise 1 (A Non-minimum Phase System)
") Prof. Dr. E. Frazzoli 5-59- Control Systems I (HS 25) Solution Exercise Set Loop Shaping Noele Norris, 9th December 26 Exercise (A Non-minimum Phase System) To increase the rise time of the system, we
Prof. Dr. E. Frazzoli 5-59- Control Systems I (HS 25) Solution Exercise Set Loop Shaping Noele Norris, 9th December 26 Exercise (A Non-minimum Phase System) To increase the rise time of the system, we