Kinematics of Particles. Chapter 2
|
|
|
- Oswald Singleton
- 6 years ago
- Views:
Transcription
1 Kinematics of Particles Chapter 2
2 Introduction Kinematics: is the branch of dynamics which describes the motion of bodies without reference to the forces that either causes the motion or are generated as a result of the motion. Kinematics is often referred to as the geometry of motion Examples of kinematics problems that engage the attention of engineers. The design of cams, gears, linkages, and other machine elements to control or produce certain desired motions, and The calculation of flight trajectory for aircraft, rockets and spacecraft.

3 If the particle is confined to a specified path, as with a bead sliding along a fixed wire, its motion is said to be Constrained. Example 1. - A small rock tied to the end of a string and whirled in a circle undergoes constrained motion until the string breaks

4 If there are no physical guides, the motion is said to be unconstrained. Example 2. - Airplane, rocket
5 Let s consider a particle and its path of travel The position of particle P at any time t can be described by specifying its: Rectangular coordinates; X,Y,Z Cylindrical coordinates; r,θ,z spherical coordinates; R, θ,ф Also described by measurements along the tangent t and normal n to the curve(path variable). The motion of particles(or rigid bodies) may be described by using coordinates measured from fixed reference axis (absolute motion analysis) or by using coordinates measured from moving reference axis (relative motion analysis).
6 Rectilinear Motion Is a motion in which a particle moving along a straight line(one-dimensional motion) Consider a particle P moving along a straight line. The position of P at any instant of time tis. The position of P at time t + t is s + s s
7 Displacement of P Change in position of the particle during the interval of t. The displacement would be negative if the particle moved in the negative s-direction Distance The total length of the path traced by the particle (it is always positive) Average velocity: ie. ( s+ s) s= s For the time interval Δt, it is defined as the ratio of the displacement Δs to the time interval Δt. s V av = t As Δt becomes smaller and approaches zero in the limit, the average velocity approaches the instantaneous velocity of the particle. s ds V = lim Vav = lim = = S (1) t 0 t 0 t dt
8 Average Acceleration For the time interval Δt, it is defined as the ratio of the change in velocity Δv to the time interval Δt. As Δt becomes smaller and approaches zero in the limit, the average acceleration approaches the instantaneous acceleration of the particle. OR a av = v t v dv a = lim = = v (2a) t 0 t dt 2 a lim v dv d ds d s = = = = = s (2b) t 0 2 t dt dt dt dt Note:-The acceleration is positive or negative depending on whether the velocity increasing or decreasing.
9 Considering equation 1 and 2a, we get the following ds v = dt and v a = t dt = ds v and ds = v dt dv a = dv a by equating the two equations OR ads sds = = vdv sdv (3a) (3b) Equation 1,2 and 3 are the differential equations for the rectilinear motion of a particle. Rectilinear motions are solved by integration of these basic differential relation.
10 Example
11 1. A particle a particle moving in a straight line, and assuming that its position is defined by the equation. 2 3 s = 6t -t Where, t is express in seconds and s is in meters. Determine the velocity and acceleration of the particles at any time t.
12 2. The acceleration of a particle is given by, a = 4t 30 where a is in meters per second squared and t is in seconds. Determine the velocity and displacement as function time. The initial displacement at t=0 is s o =-5m, and the initial velocity is v o =30m/s.
13 Graphical Representation of Relationship Among s, v, and t
14 Graph of s Vs t By constructing tangent to the curve at any time t, we obtain the slope, the slope of the s-t curve at any time instant gives the instantaneous velocity v=ds/dt
15 Graph of v Vs t The slope the s-t curve at any instant gives the instantaneous acceleration. The area under the v-t curves is the net displacement of the particle during the The area under the v-t curve is the net displacement of the particle during the interval from t1 to t2. interval from t 1 to t 2. da = vdt A = t t 1 2 vdt ds v =, ds = vdt dt s2 t2 ds = vdt s 1 1 Equating the two equations gives A s A= s s 2 = ds, s t
16 Graph of a Vs t The area under the a-t curve during time dt is the net change in velocity of the particle between t1 and t2. The area under the a-t curve is the net change in velocity of the particles t 1 to t 2. da = adt t2 A = adt t 1 a dv, dt = adt = dv t t adt = v 2 2 v 1 1 dv Equating the two equations gives A = v v 1 2 dv A= v v 2 1
17 Graph of a Vs s The net area under the a-s curve can be found da = ads A = s s 1 2 ads v vdv v = vdv ads = s 2 2 s 1 1 ads Equating the two equations gives A = v v 1 2 vdv 2 2 V2 V1 A = 2
18 dv since, tanθ = ds 1 Similar Triangle CB tanθ = v dv CB = vdv = CBds, vdv = ads ds v Equating the two equations gives CBds = ads CB = a From the graph distance CB is acceleration
19 The graphical representations described are useful for:- visualizing the relationships among the several motion quantities. approximating results by graphical integration or differentiation. experimental data and motions that involve discontinuous relationship b/n variables are frequently analyzed graphically.
20 Methods for determining the velocity and displacement Function
21 Constant Acceleration At the beginning of the interval t = 0, s = s, v= v v v o o dv a = adt = dv dt t dv = adt v v = at 0 v = v + at o o o
22 using vdv = ads v v o v 2 v 2 vdv v 2 v vo 2 2 o = s s o = as ads s s o ( s ) = a s 2 2 o o v = v + 2a(s s ) 0
23 Using 0 ds v = dt ds = vdt s t o s o 2 ds = ( v + at) dt s s = vt+ o o at 2 1 s = s + v t + at o o 2 2
24 These relations are necessarily restricted to the special case where the acceleration is constant. The integration limits depend on the initial and final conditions and for a given problem may be different from those used here. Typically, conditions of motion are specified by the type of acceleration experienced by the particle. Determination of velocity and position requires two successive integrations. Three classes of motion may be defined for: - acceleration given as a function of time, a = f(t) - acceleration given as a function of position, a = f(x) - acceleration given as a function of velocity, a = f(v)
25 Acceleration given as a function of time, a=f(t) dv a f ( t) dt = = dv = f ( t) dt ( ) ds dt = v ds v dt = s t ds = s0 0 v v f s ds Acceleration given as a function of displacement, a = f(s) v dv = ads v dv f ( s) ds s s = 0 = ( ) 0 vdt 0 = = ( ) ( ) v v f s ds s s 0 v v s s v dv f s ds 0 0 s = ( ) s 0 t v v f t dt s s vdt 0 t = v = v + f s ds 0
26 Acceleration given as a function of velocity, a=f(v) dv dv a f ( v) dt = = dt f ( v ) = ( ) v v dv f v = 0 0 t dt vdv = ads vdv = f () v ds v v 0 dv f v = t ( ) ds = v dv f v ( ) s s ds = v v 0 0 v dv f v ( ) s v s = 0 v 0 v dv f v ( )
27 Examples
28 1. The position of a particle which moves along a straight lines is defined by the relation Where S is expressed in m and t in second. Determine: 3 2 S t t t = a) The time which the velocity will be zero. b) The position and distance travelled by the particle at that time. c) The acceleration of the particle at that time. d) The distance travelled by the particle between 4 sec and 6 sec.
29 2. A girl rolls a ball up an incline and allows it to return to her. For the angle θ and ball involved, the acceleration of the ball along the incline is constant at 0.25g, directed down the incline. If the ball is released with a speed of 4 m/s, determine the distance s it moves up the incline before reversing its direction and the total time t required for the ball to return to the child s hand.

30 3.The main elevator A of the CN Tower in Toronto rises about 350 m and for most of its run has a constant speed of 22 km/h. Assume that both the acceleration and deceleration have a constant 1 magnitude of and determine the time duration t 4 g of the elevator run.
31 4. A sprinter reaches his top speed of 10.6m/s in t second from rest with essentially constant acceleration. If he maintains his speed and covers the 100m distance in 10.5 s, find the acceleration interval t and his average starting acceleration a.

32 5. A motorcycle patrolman starts from rest at A two seconds after a car, speeding at the constant rate of 120 km/h, passes point A. If the patrolman accelerates at the rate of 6 m/s 2 until he reaches his maximum permissible speed of 150 km/h, which he maintains, calculate the distance s from point A to the point at which be overtakes the car.
33 6. When the effect of aerodynamic drag is included, the y-acceleration of a baseball moving vertically upward is, while the acceleration when the ball is moving downward is, where k is a positive constant and v is the speed in feet per second. If the ball is thrown upward at 30 m/sec from essentially ground level, compute its maximum height h and its speed upon impact with the ground. Take k to be.0066m -1 and assume that g is constant.
34 Plane Curvilinear Motion
35 The motion of a particle along a curved path that lies on a single plane. Consider the continuous motion of a particle along a plane curve. At time t, the particle is at position A, which is located by the position vector r measured from some convenient fixed origin o. At time t + t, the particle is at A located by the position vector r + r. The vector Δr joining A and A represents the change in the position vector during the time interval Δt (displacement). The distance actually traveled by the particle as it moves along the path from A to A is the scalar s.
36 The average velocity of the particle between A and A defined as: The average speed of the particle between A and A defined as: The instantaneous velocity, v V av av r = t s = t r dr v = lim = t = r 0 t dt As t approaches zero, the direction of r approaches to the tangent of the path. Hence the velocity V is always a vector tangent to the path. ds V = v = = s dt
37 Average acceleration, of the particle between A and A Instantaneous acceleration, a av v = t a v dv a = lim = = v t 0 t dt Note: The direction of the acceleration of a particle in curvilinear motion is neither tangent to the path nor normal to the path.
38 For curvilinear motion of a particle in a plane there are three different coordinate systems. Rectangular coordinate (x, y, z) Normal and tangential coordinate (n-t) Polar coordinates (r-ɵ)
39 Rectangular coordinates (x-y) The resulting curvilinear motion is obtained by a vector combination of the x- and y-components of the position vector, the velocity, and the acceleration. Consider the following figure We may write the vectors in terms of their x and y components. r = xi + yj v = r = xi + yj = v x + vy a = v = r = xi + yj = a x + ay r, v and a
40 The direction of the velocity is always tangent to the path The magnitude of the motion vectors 2 2 r = x + y v= v + v 2 2 x y a = a + a 2 2 x y θ = tan 1 v v y x
41 Projectile motion Neglect the aerodynamic drag, the earth curvature and rotation, The altitude range is so small enough so that the acceleration due to gravity can be considered constant, therefore;
42 ax = 0 a y = g at t=0 ; x=x 0,y=y 0 ; vx=vxo and vy=vy0 Position x = x + 0 vx0t 2 1 y = y 0 + v y0 t gt 2 Velocity v x = ( v x ) 0 v v y 2 y = vy 0 gt 2 = v 2g( y y ) yo o
43 Normal and Tangential Coordinate(n-t) The n and t coordinates are considered to move along the path with the particle. The t-axis is tangent to the path (curve) at the instant considered, positive in the direction of the particle s motion. The n-axis is perpendicular to the t-axis with the positive direction toward the center of curvature of the curve.
44 The coordinate n and t will now be used to describe the velocity v and acceleration a. Similarly to the unit vectors i and j introduced for rectangular coordinate system, unit vectors for t-n coordinate system can be used. For this purpose we introduce unit vector e t in the t-direction e n in the n-direction. e t - directed toward the direction of motion. e n -directed toward the center of curvature of the path.
45 During the differential increment of time dt, the particle moves a differential distance ds along the curve from A to A. With the radius of curvature of the path at this position designated by ρ, we see that Velocity ds = ρdβ, β is in radians ds ρdβ dβ v = v = = = ρ dt dt dt Since it is unnecessary to consider the differential change in ρ between A and A, v = ve = ρβ e...(1) t t
46 Acceleration The acceleration is a vector which reflects both the change in magnitude and the change in direction of v. dv a = = dt d dt ( ) ve t Now differentiate the velocity by applying the ordinary rule (chain rule) for the differentiation of the product of a scalar and a vector. a = a = dv dt v et = + d dt v et ( ve ) t = dv dt e t de + v dt t Where the unit vector e t now has a derivative because its direction changes.
47 To find the derivative of consider the following figure Using vector addition e t = e t + e t Since the magnitude e t = e t = 1 The direction of e t and e t are different det = et dθ = dθ The direction of de t is given by e n de = de e = dθe t t n n de t n dθ = e Or dividing by dt det dt de t dt dθen = dt e t = θe n
48 = v et + v et a a = at + an a t change in direction of velocity a n change in magnitude of velocity a = ve = v θe n t n v θ = = ρθ v ρ v v a = v e = e ρ ρ n n n 2 2 v a = en + ve ρ 2 v 2 an = = ρθ = v θ v= ρθ ρ a = v = s t a= a + a 2 2 n t t
49 Note: a n is always directed towards the center of curvature of the path. a t is directed towards the positive t-direction of the motion if the speed v is increasing and towards the negative t-direction if the speed v is decreasing. At the inflection point in the curve, the 2 v normal acceleration, goes to zero since ρ ρ becomes infinity.
50 Special case of motion Circular motion 2 v a n = but ρ=r and ρ 2 a n = rθ dv d at = = rθ = r dt dt a a t = rθ = rθ e t + rθ 2 e n v = rθ d θ dt
51 The particle moves along a path expressed as y = f(x). The radius of curvature,ρ, at any point on the path can be calculated from ρ xy = dy dx 1 + ( 2 d y 2 ) dx 2 3 2
52 Example

53 1. For a certain interval of motion, the pin P is forced to move in the fixed parabolic slot by the vertical slotted guide, which moves in the x - direction at the constant rate of 20 mm/s. All measurements are in millimeters and seconds. Calculate the magnitudes of the velocity v and acceleration a of pin P when x = 60mm.
54 2. If the tennis player serves the ball with a velocity v of 130km/h at the angle θ=5 0, calculate the vertical clearance h of the center of the ball above the net and the distance s from the net where the ball hits the court surface. Neglect air resistance and the effect of ball spin.
55 3. A projectile is launched with an initial speed of 200 m/s at an angle of 60 0 with respect to the horizontal. Compute the range R as measured up the incline.
56 4. A particle is ejected from the tube at A with a velocity v at an angle θ with the vertical y-axis. A strong horizontal acceleration a in the x-direction. If the particle strikes the ground at a point directly under its released position, determine the height h of point A. The downward y-acceleration may be taken as the constant g.

57 5. The motion of the pin A in the fixed circular slot is controlled by the guide B, which is being elevated by its lead screw with a constant upward velocity v o =2 m/s for an interval of its motion. Calculate both the normal and tangential components of acceleration of pin A as its passes the position for which θ=30 0.

58 6. The pin P is constrained to move in the slotted guides which move at right angles to one another. At the instant represented, A has a velocity to the right of 0.2 m/s which is decreasing at the rate of 0.75 m/s each second. At the same time, B is moving down with a velocity of 0.15 m/s which is decreasing at the rate of 0.5 m/s each second. For this instant determine the radius of curvature ρ of the path followed by P. Is it possible to also determine the time rate of change of ρ?
59 Curvilinear Motion Polar coordinate system (r- ѳ)
60 Polar coordinate(r- ѳ) Where the particle is located by the radial distance r from a fixed pole and by an angular measurement ѳ to the radial line. Polar coordinates are particularly useful when a motion is constrained through the control of a radial distance and an angular position, or when an unconstrained motion is observed by measurements of a radial distance and an angular position.
61 An arbitrary fixed line, such as the x- axis, is used as a reference for the measurement ѳ. Unit vectors e r and e ѳ are established in the positive r and ѳ directions, respectively. The position vector to the particle at A has a magnitude equal to the radial distance r and a direction specified by the unit vector e r. We express the location of the particle at A by the vector r = re r
62 During time dt the coordinate direction rotate through the angle dθ and the unit vectors also rotates through the same ' ' angle from e to e and e to e der = er dθ = dθ der = der e θ der = dθe θ der dθ = e θ dt dt e r = θ e θ r r θ θ deθ = eθ dθ = dθ deθ = deθ. eθ deθ = dθe r deθ dθ = er dt dt e θ = θe r
63 Velocity The velocity is obtained by differentiating the vector r v = dr dt v = re + re d = ( rer ) = re r + re dt r r, but er v= ve + ve v = rer + rθ e θ r r θ θ = θ e θ r vr v θ = r = r 2 2 θ v = v vr + v θ α 1 = tan θ v r
64 Acceleration Differentiating the expression for v to obtain the acceleration a. dv d a = v = = ( re r + r θeθ ) dt dt a = re r + re r + r θe θ + r θe θ + r θe θ But e θ = θer e r = θe θ a = re r + r θe θ + r ( θe θ) + r θe θ + r θ( θe r) 2 a = re r + r θe θ + r θe θ + r θe θ r θ e r 2 a = ( r r θ ) e r + (2 r θ + r θ) e r θ a = ar + a 2 θ i.e ar = r r θ 2 2 aθ = 2r θ + r a a a θ = 1 a r + θ φ = tan θ a r
65 For circular motion For circular motion r is constant v= ve + ve r vr v θ r θ = r = = r θ v = v = r θe θ θ θ 0 N.B This description is the same as that obtained with n and t components, but the positive r-direction is in the negative n-direction Hence a r =-a n for circular motion a = ar + a θ 2 a = ( r rθ ) er + (2 rθ + rθ) er θ 2 a = rθ er + rθer θ
66 Example

67 1. The cam is designed so that the center of the roller A which follows the contour moves on a limaçon defined by r = b ccosθ, where b> c. If the cam does not rotate, determine the magnitude of the total acceleration of A in terms of θ if the slotted arm revolves with a constant counterclockwise angular rate θ = ω.

68 2. The fixed horizontal guide carries a slider and pin P whose motion is controlled by the rotating slotted arm OA. If the arm is revolving about O at the constant rate θ = 2 rad/s for an interval of its designed motion, determine the magnitudes of the velocity and acceleration of the slider in the slot for the instant when θ = 60. Also find the r-components of the velocity and acceleration.
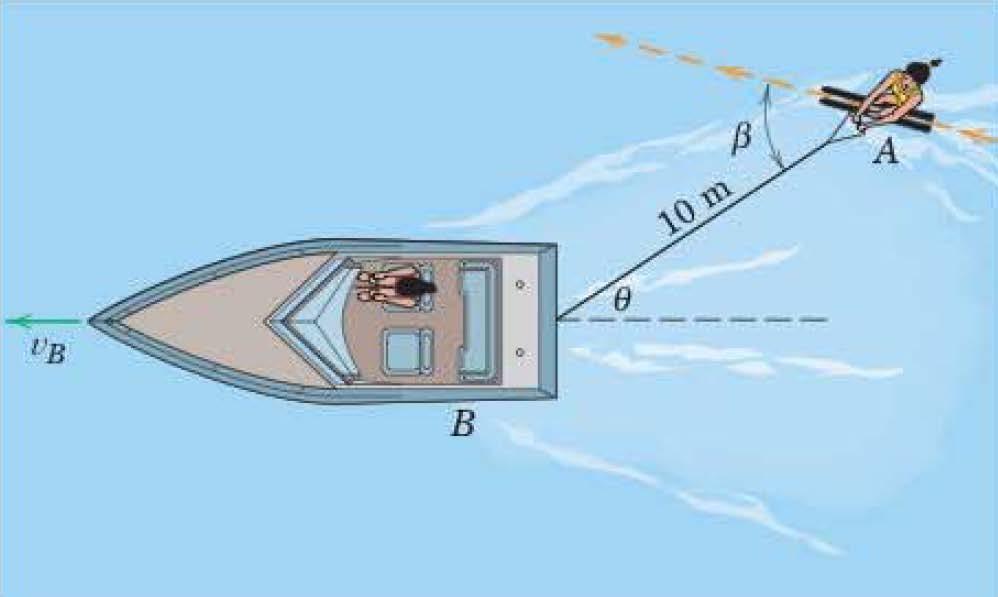
69 3. During a portion of a vertical loop, an airplane flies in an arc of radius ρ = 600m with a constant speed v = 400 km / s. When the airplane is at A, the angle made by v with the horizontal is β = 30, o and radar tracking gives r = 800m and θ = 30 o.calculate v, v, a and θ for this instant. r θ r
70 Relative Motion (Translating Axes) If the motion analysis of a particle using coordinates which are referred to a fixed reference system is said to be absolute motion analysis. If the motion analysis of a particle using coordinates which are referred to a moving reference system is said to be relative motion analysis. Relative motion analysis : is the motion analysis of a particle using moving reference system coordinate in reference to fixed reference system. In this portion we will confine our attention to:- moving reference systems that translate but do not rotate. The relative motion analysis is limited to plane motion.
71 Consider two particles A and B that may have separate curvilinear motion in a given plane or in parallel planes. X,Y : inertial frame of reference x,y : translating coordinate system We will arbitrarily attach the origin of a set of translating (non-rotating) axes x-y to particle B and observe the motion A from our moving position B. The position vector A as measured relative to the frame x-y is rab / = xi + yj Where A/B means A relative to B
 dt dt r = r + r v = v + v A B AB / A B AB / dva d aa= = ( vb+ vab / ) dt dt v = v + v A B AB / a = a + a A B AB /")
72 The absolute position of A is determined by the vector Velocity Acceleration r = r + r A B AB / dra d va= = ( rb+ rab / ) dt dt r = r + r v = v + v A B AB / A B AB / dva d aa= = ( vb+ vab / ) dt dt v = v + v A B AB / a = a + a A B AB /
73 Note:- The observed coordinates system can be Rectangular Normal and tangential Polar Therefore, the choice of any coordinates system depends on the type of given conditions for the problem.
74 Example

75 1.


76 2.

77 3.


78 4.
79 Constrained Motion of Connected Particles

80 Sometimes the position of a particle will depend upon the position of another or of several particles. If the particles are connected together by an inextensible ropes, the resulting motion is called constrained motion. Velocity Acceleration The motion of A is twice the vertical motion B. One degree of freedom (only one variable is needed to specify the position of all parts of the system). Circumference of the circle C = 2π r 1/2C = π r 1/4C = π r 2 Total length of the cable is r2 L= x+ π + 2y+ π r1 + b 2 But L,r 2, r 1, and b are all constant d d π r2 ( L) = ( x+ + 2 y+ π r + b) dt dt 2 0= x+ 2y OR 0= VA + 2V V = V x = 2y A 2 B 0= x+ 2 y OR 0= aa + 2a x= 2 y a = 2a A 1 B B B The velocity of A have a sign which opposite to that of the velocity of B.
81 Two degree of freedom L1 = YA + 2YD + Constant L2 = YB + YC + ( YC YD) + Constant d d ( L1 ) = ( YA + 2YD + Constant) dt dt 0= Y + 2Y d dt Eliminating one of the terms A and D 2 YA 0= Y B + 2Y C + YA 0= Y B + 2Y C Y + 2Y + 4Y = 0 Y + 2Y + 4Y = 0 A B C V + 2V + 4V = 0 A B C A D 0= Y A + 2Y D d L2 = YB + YC + ( YC YD) + Constant dt 0= Y + 2Y Y ( ) ( ) B C D 0= Y + 2Y Y B C D Y Y = A B C a + 2a + 4a = 0 A B C YA Y D = 2 The signs in the equations are determined by visualization. For Example:- Both A and B have downward (positive) velocity, but C will have an upward (negative) Velocity.
82 Example


83 1.


84 2.


85 3.
INTRODUCTION & RECTILINEAR KINEMATICS: CONTINUOUS MOTION
 INTRODUCTION & RECTILINEAR KINEMATICS: CONTINUOUS MOTION (Sections 12.1-12.2) Today s Objectives: Students will be able to find the kinematic quantities (position, displacement, velocity, and acceleration)
INTRODUCTION & RECTILINEAR KINEMATICS: CONTINUOUS MOTION (Sections 12.1-12.2) Today s Objectives: Students will be able to find the kinematic quantities (position, displacement, velocity, and acceleration)
RIGID BODY MOTION (Section 16.1)
") RIGID BODY MOTION (Section 16.1) There are cases where an object cannot be treated as a particle. In these cases the size or shape of the body must be considered. Rotation of the body about its center
RIGID BODY MOTION (Section 16.1) There are cases where an object cannot be treated as a particle. In these cases the size or shape of the body must be considered. Rotation of the body about its center
KINEMATICS OF A PARTICLE. Prepared by Engr. John Paul Timola
 KINEMATICS OF A PARTICLE Prepared by Engr. John Paul Timola Particle has a mass but negligible size and shape. bodies of finite size, such as rockets, projectiles, or vehicles. objects can be considered
KINEMATICS OF A PARTICLE Prepared by Engr. John Paul Timola Particle has a mass but negligible size and shape. bodies of finite size, such as rockets, projectiles, or vehicles. objects can be considered
Kinematics of. Motion. 8 l Theory of Machines
 8 l Theory of Machines Features 1. 1ntroduction.. Plane Motion. 3. Rectilinear Motion. 4. Curvilinear Motion. 5. Linear Displacement. 6. Linear Velocity. 7. Linear Acceleration. 8. Equations of Linear
8 l Theory of Machines Features 1. 1ntroduction.. Plane Motion. 3. Rectilinear Motion. 4. Curvilinear Motion. 5. Linear Displacement. 6. Linear Velocity. 7. Linear Acceleration. 8. Equations of Linear
Curvilinear Motion: Normal and Tangential Components
 Curvilinear Motion: Normal and Tangential Components Coordinate System Provided the path of the particle is known, we can establish a set of n and t coordinates having a fixed origin, which is coincident
Curvilinear Motion: Normal and Tangential Components Coordinate System Provided the path of the particle is known, we can establish a set of n and t coordinates having a fixed origin, which is coincident
Review of Engineering Dynamics
 Review of Engineering Dynamics Part 1: Kinematics of Particles and Rigid Bodies by James Doane, PhD, PE Contents 1.0 Course Overview... 4.0 Basic Introductory Concepts... 4.1 Introduction... 4.1.1 Vectors
Review of Engineering Dynamics Part 1: Kinematics of Particles and Rigid Bodies by James Doane, PhD, PE Contents 1.0 Course Overview... 4.0 Basic Introductory Concepts... 4.1 Introduction... 4.1.1 Vectors
DYNAMICS ME HOMEWORK PROBLEM SETS
 DYNAMICS ME 34010 HOMEWORK PROBLEM SETS Mahmoud M. Safadi 1, M.B. Rubin 2 1 safadi@technion.ac.il, 2 mbrubin@technion.ac.il Faculty of Mechanical Engineering Technion Israel Institute of Technology Spring
DYNAMICS ME 34010 HOMEWORK PROBLEM SETS Mahmoud M. Safadi 1, M.B. Rubin 2 1 safadi@technion.ac.il, 2 mbrubin@technion.ac.il Faculty of Mechanical Engineering Technion Israel Institute of Technology Spring
Announcements. Introduction and Rectilinear Kinematics: Continuous Motion - Sections
 Announcements Week-of-prayer schedule (10:45-11:30) Introduction and Rectilinear Kinematics: Continuous Motion - Sections 12.1-2 Today s Objectives: Students will be able to find the kinematic quantities
Announcements Week-of-prayer schedule (10:45-11:30) Introduction and Rectilinear Kinematics: Continuous Motion - Sections 12.1-2 Today s Objectives: Students will be able to find the kinematic quantities
PLANAR RIGID BODY MOTION: TRANSLATION &
 PLANAR RIGID BODY MOTION: TRANSLATION & Today s Objectives : ROTATION Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
PLANAR RIGID BODY MOTION: TRANSLATION & Today s Objectives : ROTATION Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
Addis Ababa University Addis Ababa Institute of Technology School Of Mechanical and Industrial Engineering Extension Division` Assignment 1
 Assignment 1 1. Vehicle B is stopped at a traffic light, as shown in the figure. At the instant that the light turns green, vehicle B starts to accelerate at 0.9144m/s 2. At this time vehicle A is 91.44m
Assignment 1 1. Vehicle B is stopped at a traffic light, as shown in the figure. At the instant that the light turns green, vehicle B starts to accelerate at 0.9144m/s 2. At this time vehicle A is 91.44m
Chapter 4. Motion in Two Dimensions. Professor Wa el Salah
 Chapter 4 Motion in Two Dimensions Kinematics in Two Dimensions Will study the vector nature of position, velocity and acceleration in greater detail. Will treat projectile motion and uniform circular
Chapter 4 Motion in Two Dimensions Kinematics in Two Dimensions Will study the vector nature of position, velocity and acceleration in greater detail. Will treat projectile motion and uniform circular
Chapter 1: Kinematics of Particles
 Chapter 1: Kinematics of Particles 1.1 INTRODUCTION Mechanics the state of rest of motion of bodies subjected to the action of forces Static equilibrium of a body that is either at rest or moes with constant
Chapter 1: Kinematics of Particles 1.1 INTRODUCTION Mechanics the state of rest of motion of bodies subjected to the action of forces Static equilibrium of a body that is either at rest or moes with constant
INTRODUCTION. The three general approaches to the solution of kinetics. a) Direct application of Newton s law (called the forcemass-acceleration
 Direct application of Newton s law (called the forcemass-acceleration") INTRODUCTION According to Newton s law, a particle will accelerate when it is subjected to unbalanced force. Kinetics is the study of the relations between unbalanced forces and resulting changes in motion.
INTRODUCTION According to Newton s law, a particle will accelerate when it is subjected to unbalanced force. Kinetics is the study of the relations between unbalanced forces and resulting changes in motion.
MOTION IN TWO OR THREE DIMENSIONS
 MOTION IN TWO OR THREE DIMENSIONS 3 Sections Covered 3.1 : Position & velocity vectors 3.2 : The acceleration vector 3.3 : Projectile motion 3.4 : Motion in a circle 3.5 : Relative velocity 3.1 Position
MOTION IN TWO OR THREE DIMENSIONS 3 Sections Covered 3.1 : Position & velocity vectors 3.2 : The acceleration vector 3.3 : Projectile motion 3.4 : Motion in a circle 3.5 : Relative velocity 3.1 Position
Downloaded from 3. Motion in a straight line. Study of motion of objects along a straight line is known as rectilinear motion.
 3. Motion in a straight line IMPORTANT POINTS Study of motion of objects along a straight line is known as rectilinear motion. If a body does not change its position with time it is said to be at rest.
3. Motion in a straight line IMPORTANT POINTS Study of motion of objects along a straight line is known as rectilinear motion. If a body does not change its position with time it is said to be at rest.
Dynamics Plane kinematics of rigid bodies Section 4: TJW Rotation: Example 1
 Section 4: TJW Rotation: Example 1 The pinion A of the hoist motor drives gear B, which is attached to the hoisting drum. The load L is lifted from its rest position and acquires an upward velocity of
Section 4: TJW Rotation: Example 1 The pinion A of the hoist motor drives gear B, which is attached to the hoisting drum. The load L is lifted from its rest position and acquires an upward velocity of
1. A sphere with a radius of 1.7 cm has a volume of: A) m 3 B) m 3 C) m 3 D) 0.11 m 3 E) 21 m 3
 m 3 B) m 3 C) m 3 D) 0.11 m 3 E) 21 m 3") 1. A sphere with a radius of 1.7 cm has a volume of: A) 2.1 10 5 m 3 B) 9.1 10 4 m 3 C) 3.6 10 3 m 3 D) 0.11 m 3 E) 21 m 3 2. A 25-N crate slides down a frictionless incline that is 25 above the horizontal.
1. A sphere with a radius of 1.7 cm has a volume of: A) 2.1 10 5 m 3 B) 9.1 10 4 m 3 C) 3.6 10 3 m 3 D) 0.11 m 3 E) 21 m 3 2. A 25-N crate slides down a frictionless incline that is 25 above the horizontal.
Chapter 4. Motion in Two Dimensions
 Chapter 4 Motion in Two Dimensions Kinematics in Two Dimensions Will study the vector nature of position, velocity and acceleration in greater detail Will treat projectile motion and uniform circular motion
Chapter 4 Motion in Two Dimensions Kinematics in Two Dimensions Will study the vector nature of position, velocity and acceleration in greater detail Will treat projectile motion and uniform circular motion
y(t) = y 0 t! 1 2 gt 2. With y(t final ) = 0, we can solve this for v 0 : v 0 A ĵ. With A! ĵ =!2 and A! = (2) 2 + (!
 = y 0 t! 1 2 gt 2. With y(t final ) = 0, we can solve this for v 0 : v 0 A ĵ. With A! ĵ =!2 and A! = (2) 2 + (!") 1. The angle between the vector! A = 3î! 2 ĵ! 5 ˆk and the positive y axis, in degrees, is closest to: A) 19 B) 71 C) 90 D) 109 E) 161 The dot product between the vector! A = 3î! 2 ĵ! 5 ˆk and the unit
1. The angle between the vector! A = 3î! 2 ĵ! 5 ˆk and the positive y axis, in degrees, is closest to: A) 19 B) 71 C) 90 D) 109 E) 161 The dot product between the vector! A = 3î! 2 ĵ! 5 ˆk and the unit
Chapter 4 Kinematics II: Motion in Two and Three Dimensions
 Chapter 4 Kinematics II: Motion in Two and Three Dimensions Demonstrations: 1) Ball falls down and another falls out 2) Parabolic and straight line motion from two different frames. The truck with a dropping
Chapter 4 Kinematics II: Motion in Two and Three Dimensions Demonstrations: 1) Ball falls down and another falls out 2) Parabolic and straight line motion from two different frames. The truck with a dropping
CEE 271: Applied Mechanics II, Dynamics Lecture 1: Ch.12, Sec.1-3h
 1 / 30 CEE 271: Applied Mechanics II, Dynamics Lecture 1: Ch.12, Sec.1-3h Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Tuesday, August 21, 2012 2 / 30 INTRODUCTION
1 / 30 CEE 271: Applied Mechanics II, Dynamics Lecture 1: Ch.12, Sec.1-3h Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Tuesday, August 21, 2012 2 / 30 INTRODUCTION
Motion In One Dimension
 Motion In One Dimension Particle A particle is ideally just a piece or a quantity of matter, having practically no linear dimensions but only a position. In practice it is difficult to get such particle,
Motion In One Dimension Particle A particle is ideally just a piece or a quantity of matter, having practically no linear dimensions but only a position. In practice it is difficult to get such particle,
PHYSICS. Hence the velocity of the balloon as seen from the car is m/s towards NW.
 PHYSICS. A balloon is moving horizontally in air with speed of 5 m/s towards north. A car is moving with 5 m/s towards east. If a person sitting inside the car sees the balloon, the velocity of the balloon
PHYSICS. A balloon is moving horizontally in air with speed of 5 m/s towards north. A car is moving with 5 m/s towards east. If a person sitting inside the car sees the balloon, the velocity of the balloon
KINEMATICS OF PARTICLES RESPECT TO TRANSLATING AXES
 KINEMATICS OF PARTICLES RELATIVE MOTION WITH RESPECT TO TRANSLATING AXES In the previous articles, we have described particle motion using coordinates with respect to fixed reference axes. The displacements,
KINEMATICS OF PARTICLES RELATIVE MOTION WITH RESPECT TO TRANSLATING AXES In the previous articles, we have described particle motion using coordinates with respect to fixed reference axes. The displacements,
Dynamic - Engineering Mechanics 131
 Dynamic - Engineering Mechanics 131 Stefan Damkjar Winter of 2012 2 Contents 1 General Principles 7 1.1 Mechanics..................................... 7 1.2 Fundamental Concepts..............................
Dynamic - Engineering Mechanics 131 Stefan Damkjar Winter of 2012 2 Contents 1 General Principles 7 1.1 Mechanics..................................... 7 1.2 Fundamental Concepts..............................
Motion in Two Dimensions. 1.The Position, Velocity, and Acceleration Vectors 2.Two-Dimensional Motion with Constant Acceleration 3.
 Motion in Two Dimensions 1.The Position, Velocity, and Acceleration Vectors 2.Two-Dimensional Motion with Constant Acceleration 3.Projectile Motion The position of an object is described by its position
Motion in Two Dimensions 1.The Position, Velocity, and Acceleration Vectors 2.Two-Dimensional Motion with Constant Acceleration 3.Projectile Motion The position of an object is described by its position
Chapter 3: Kinematics in Two Dimensions
 Chapter 3: Kinematics in Two Dimensions Vectors and Scalars A scalar is a number with units. It can be positive, negative, or zero. Time: 100 s Distance and speed are scalars, although they cannot be negative
Chapter 3: Kinematics in Two Dimensions Vectors and Scalars A scalar is a number with units. It can be positive, negative, or zero. Time: 100 s Distance and speed are scalars, although they cannot be negative
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Kinematics
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Kinematics Module 10 - Lecture 24 Kinematics of a particle moving on a curve Today,
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Kinematics Module 10 - Lecture 24 Kinematics of a particle moving on a curve Today,
ISSUED BY K V - DOWNLOADED FROM KINEMATICS
 KINEMATICS *rest and Motion are relative terms, nobody can exist in a state of absolute rest or of absolute motion. *One dimensional motion:- The motion of an object is said to be one dimensional motion
KINEMATICS *rest and Motion are relative terms, nobody can exist in a state of absolute rest or of absolute motion. *One dimensional motion:- The motion of an object is said to be one dimensional motion
Kinematics. v (m/s) ii. Plot the velocity as a function of time on the following graph.
 ii. Plot the velocity as a function of time on the following graph.") Kinematics 1993B1 (modified) A student stands in an elevator and records his acceleration as a function of time. The data are shown in the graph above. At time t = 0, the elevator is at displacement x
Kinematics 1993B1 (modified) A student stands in an elevator and records his acceleration as a function of time. The data are shown in the graph above. At time t = 0, the elevator is at displacement x
PLANAR RIGID BODY MOTION: TRANSLATION & ROTATION
 PLANAR RIGID BODY MOTION: TRANSLATION & ROTATION Today s Objectives : Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
PLANAR RIGID BODY MOTION: TRANSLATION & ROTATION Today s Objectives : Students will be able to: 1. Analyze the kinematics of a rigid body undergoing planar translation or rotation about a fixed axis. In-Class
RELATIVE MOTION ANALYSIS: VELOCITY (Section 16.5)
") RELATIVE MOTION ANALYSIS: VELOCITY (Section 16.5) Today s Objectives: Students will be able to: a) Describe the velocity of a rigid body in terms of translation and rotation components. b) Perform a relative-motion
RELATIVE MOTION ANALYSIS: VELOCITY (Section 16.5) Today s Objectives: Students will be able to: a) Describe the velocity of a rigid body in terms of translation and rotation components. b) Perform a relative-motion
NEWTON S LAWS OF MOTION, EQUATIONS OF MOTION, & EQUATIONS OF MOTION FOR A SYSTEM OF PARTICLES
 NEWTON S LAWS OF MOTION, EQUATIONS OF MOTION, & EQUATIONS OF MOTION FOR A SYSTEM OF PARTICLES Objectives: Students will be able to: 1. Write the equation of motion for an accelerating body. 2. Draw the
NEWTON S LAWS OF MOTION, EQUATIONS OF MOTION, & EQUATIONS OF MOTION FOR A SYSTEM OF PARTICLES Objectives: Students will be able to: 1. Write the equation of motion for an accelerating body. 2. Draw the
15-94 Chapter 15: Homework Problems
 15-94 Chapter 15: Homework Problems 13.1 Rectilinear Motion (a) The displacement of a particle is given by s = At 3 Bt 2 Ct 50m. If A = 1m/s 3, B = 2m/s 2, and C = 3m/s, plot the displacement, velocity,
15-94 Chapter 15: Homework Problems 13.1 Rectilinear Motion (a) The displacement of a particle is given by s = At 3 Bt 2 Ct 50m. If A = 1m/s 3, B = 2m/s 2, and C = 3m/s, plot the displacement, velocity,
Chapter 4. Motion in Two Dimensions
 Chapter 4 Motion in Two Dimensions Kinematics in Two Dimensions Will study the vector nature of position, velocity and acceleration in greater detail Will treat projectile motion and uniform circular motion
Chapter 4 Motion in Two Dimensions Kinematics in Two Dimensions Will study the vector nature of position, velocity and acceleration in greater detail Will treat projectile motion and uniform circular motion
PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION
 PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION I. Moment of Inertia: Since a body has a definite size and shape, an applied nonconcurrent force system may cause the body to both translate and rotate.
PLANAR KINETICS OF A RIGID BODY FORCE AND ACCELERATION I. Moment of Inertia: Since a body has a definite size and shape, an applied nonconcurrent force system may cause the body to both translate and rotate.
2D and 3D Motion. with constant (uniform) acceleration
 acceleration") 2D and 3D Motion with constant (uniform) acceleration 1 Dimension 2 or 3 Dimensions x x v : position : position : displacement r : displacement : velocity v : velocity a : acceleration a r : acceleration
2D and 3D Motion with constant (uniform) acceleration 1 Dimension 2 or 3 Dimensions x x v : position : position : displacement r : displacement : velocity v : velocity a : acceleration a r : acceleration
Chapter 2. Motion in One Dimension
 Chapter 2 Motion in One Dimension Types of Motion Translational An example is a car traveling on a highway. Rotational An example is the Earth s spin on its axis. Vibrational An example is the back-and-forth
Chapter 2 Motion in One Dimension Types of Motion Translational An example is a car traveling on a highway. Rotational An example is the Earth s spin on its axis. Vibrational An example is the back-and-forth
Kinematics. Vector solutions. Vectors
 Kinematics Study of motion Accelerated vs unaccelerated motion Translational vs Rotational motion Vector solutions required for problems of 2- directional motion Vector solutions Possible solution sets
Kinematics Study of motion Accelerated vs unaccelerated motion Translational vs Rotational motion Vector solutions required for problems of 2- directional motion Vector solutions Possible solution sets
PHYS 101 Previous Exam Problems. Kinetic Energy and
 PHYS 101 Previous Exam Problems CHAPTER 7 Kinetic Energy and Work Kinetic energy Work Work-energy theorem Gravitational work Work of spring forces Power 1. A single force acts on a 5.0-kg object in such
PHYS 101 Previous Exam Problems CHAPTER 7 Kinetic Energy and Work Kinetic energy Work Work-energy theorem Gravitational work Work of spring forces Power 1. A single force acts on a 5.0-kg object in such
Chapter 4. Motion in Two Dimensions
 Chapter 4 Motion in Two Dimensions Kinematics in Two Dimensions Will study the vector nature of position, velocity and acceleration in greater detail Will treat projectile motion and uniform circular motion
Chapter 4 Motion in Two Dimensions Kinematics in Two Dimensions Will study the vector nature of position, velocity and acceleration in greater detail Will treat projectile motion and uniform circular motion
CHAPTER # 2 VECTORS THEORETICAL QUESTIONS PAST PAPERS
 CHAPTER # 2 VECTORS THEORETICAL QUESTIONS PAST PAPERS 1. What are vectors and scalar quantities? Give one example of each. (1993, 2012) 2. What are the different methods of adding two vectors? (1988) 3.
CHAPTER # 2 VECTORS THEORETICAL QUESTIONS PAST PAPERS 1. What are vectors and scalar quantities? Give one example of each. (1993, 2012) 2. What are the different methods of adding two vectors? (1988) 3.
3. Kinetics of Particles
 3. Kinetics of Particles 3.1 Force, Mass and Acceleration 3.3 Impulse and Momentum 3.4 Impact 1 3.1 Force, Mass and Acceleration We draw two important conclusions from the results of the experiments. First,
3. Kinetics of Particles 3.1 Force, Mass and Acceleration 3.3 Impulse and Momentum 3.4 Impact 1 3.1 Force, Mass and Acceleration We draw two important conclusions from the results of the experiments. First,
Department of Physics, Korea University Page 1 of 8
 Name: Department: Student ID #: Notice +2 ( 1) points per correct (incorrect) answer No penalty for an unanswered question Fill the blank ( ) with ( ) if the statement is correct (incorrect) : corrections
Name: Department: Student ID #: Notice +2 ( 1) points per correct (incorrect) answer No penalty for an unanswered question Fill the blank ( ) with ( ) if the statement is correct (incorrect) : corrections
Chapter 4. Motion in Two Dimensions. With modifications by Pinkney
 Chapter 4 Motion in Two Dimensions With modifications by Pinkney Kinematics in Two Dimensions covers: the vector nature of position, velocity and acceleration in greater detail projectile motion a special
Chapter 4 Motion in Two Dimensions With modifications by Pinkney Kinematics in Two Dimensions covers: the vector nature of position, velocity and acceleration in greater detail projectile motion a special
Course Name : Physics I Course # PHY 107. Note - 3 : Motion in One Dimension
 Course Name : Physics I Course # PHY 107 Note - 3 : Motion in One Dimension Abu Mohammad Khan Department of Mathematics and Physics North South University https://abukhan.weebly.com Copyright: It is unlawful
Course Name : Physics I Course # PHY 107 Note - 3 : Motion in One Dimension Abu Mohammad Khan Department of Mathematics and Physics North South University https://abukhan.weebly.com Copyright: It is unlawful
MHS. Applied Math. Sample Questions. Exam to go from grade 11 to grade 12
 MHS Applied Math Exam to go from grade 11 to grade 1 Sample Questions 1. OP + PA + AR = 1. OPAR. AR 3. OR. Given two vectors u and v in the box below, how can we correctly find their sum, u + v, using
MHS Applied Math Exam to go from grade 11 to grade 1 Sample Questions 1. OP + PA + AR = 1. OPAR. AR 3. OR. Given two vectors u and v in the box below, how can we correctly find their sum, u + v, using
2. KINEMATICS. By Liew Sau Poh
 2. KINEMATICS By Liew Sau Poh 1 OBJECTIVES 2.1 Linear motion 2.2 Projectiles 2.3 Free falls and air resistance 2 OUTCOMES Derive and use equations of motion with constant acceleration Sketch and use the
2. KINEMATICS By Liew Sau Poh 1 OBJECTIVES 2.1 Linear motion 2.2 Projectiles 2.3 Free falls and air resistance 2 OUTCOMES Derive and use equations of motion with constant acceleration Sketch and use the
Chapter 8 Lecture. Pearson Physics. Rotational Motion and Equilibrium. Prepared by Chris Chiaverina Pearson Education, Inc.
 Chapter 8 Lecture Pearson Physics Rotational Motion and Equilibrium Prepared by Chris Chiaverina Chapter Contents Describing Angular Motion Rolling Motion and the Moment of Inertia Torque Static Equilibrium
Chapter 8 Lecture Pearson Physics Rotational Motion and Equilibrium Prepared by Chris Chiaverina Chapter Contents Describing Angular Motion Rolling Motion and the Moment of Inertia Torque Static Equilibrium
Chapter 2. Motion along a Straight Line
 Chapter 2 Motion along a Straight Line 1 2.1 Motion Everything in the universe, from atoms to galaxies, is in motion. A first step to study motion is to consider simplified cases. In this chapter we study
Chapter 2 Motion along a Straight Line 1 2.1 Motion Everything in the universe, from atoms to galaxies, is in motion. A first step to study motion is to consider simplified cases. In this chapter we study
EQUATIONS OF MOTION: CYLINDRICAL COORDINATES (Section 13.6)
") EQUATIONS OF MOTION: CYLINDRICAL COORDINATES (Section 13.6) Today s Objectives: Students will be able to analyze the kinetics of a particle using cylindrical coordinates. APPLICATIONS The forces acting
EQUATIONS OF MOTION: CYLINDRICAL COORDINATES (Section 13.6) Today s Objectives: Students will be able to analyze the kinetics of a particle using cylindrical coordinates. APPLICATIONS The forces acting
CIRCULAR MOTION AND GRAVITATION
 CIRCULAR MOTION AND GRAVITATION An object moves in a straight line if the net force on it acts in the direction of motion, or is zero. If the net force acts at an angle to the direction of motion at any
CIRCULAR MOTION AND GRAVITATION An object moves in a straight line if the net force on it acts in the direction of motion, or is zero. If the net force acts at an angle to the direction of motion at any
CHAPTER 3 MOTION IN TWO AND THREE DIMENSIONS
 CHAPTER 3 MOTION IN TWO AND THREE DIMENSIONS General properties of vectors displacement vector position and velocity vectors acceleration vector equations of motion in 2- and 3-dimensions Projectile motion
CHAPTER 3 MOTION IN TWO AND THREE DIMENSIONS General properties of vectors displacement vector position and velocity vectors acceleration vector equations of motion in 2- and 3-dimensions Projectile motion
Chapter 8. Dynamics II: Motion in a Plane
 Chapter 8. Dynamics II: Motion in a Plane Chapter Goal: To learn how to solve problems about motion in a plane. Slide 8-2 Chapter 8 Preview Slide 8-3 Chapter 8 Preview Slide 8-4 Chapter 8 Preview Slide
Chapter 8. Dynamics II: Motion in a Plane Chapter Goal: To learn how to solve problems about motion in a plane. Slide 8-2 Chapter 8 Preview Slide 8-3 Chapter 8 Preview Slide 8-4 Chapter 8 Preview Slide
Chapter 6. Circular Motion and Other Applications of Newton s Laws
 Chapter 6 Circular Motion and Other Applications of Newton s Laws Circular Motion Two analysis models using Newton s Laws of Motion have been developed. The models have been applied to linear motion. Newton
Chapter 6 Circular Motion and Other Applications of Newton s Laws Circular Motion Two analysis models using Newton s Laws of Motion have been developed. The models have been applied to linear motion. Newton
KINEMATICS REVIEW VECTOR ALGEBRA - SUMMARY
 1 KINEMATICS REVIEW VECTOR ALGEBRA - SUMMARY Magnitude A numerical value with appropriate units. Scalar is a quantity that is completely specified by magnitude. Vector requires both, magnitude and direction
1 KINEMATICS REVIEW VECTOR ALGEBRA - SUMMARY Magnitude A numerical value with appropriate units. Scalar is a quantity that is completely specified by magnitude. Vector requires both, magnitude and direction
Full file at
 Section 3-1 Constructing Complex Motions from Simple Motion *1. In Figure 3-1, the motion of a spinning wheel (W) that itself revolves in a circle is shown. Which of the following would not be represented
Section 3-1 Constructing Complex Motions from Simple Motion *1. In Figure 3-1, the motion of a spinning wheel (W) that itself revolves in a circle is shown. Which of the following would not be represented
Chapter 10. Rotation of a Rigid Object about a Fixed Axis
 Chapter 10 Rotation of a Rigid Object about a Fixed Axis Angular Position Axis of rotation is the center of the disc Choose a fixed reference line. Point P is at a fixed distance r from the origin. A small
Chapter 10 Rotation of a Rigid Object about a Fixed Axis Angular Position Axis of rotation is the center of the disc Choose a fixed reference line. Point P is at a fixed distance r from the origin. A small
CEE 271: Applied Mechanics II, Dynamics Lecture 9: Ch.13, Sec.4-5
 1 / 40 CEE 271: Applied Mechanics II, Dynamics Lecture 9: Ch.13, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa 2 / 40 EQUATIONS OF MOTION:RECTANGULAR COORDINATES
1 / 40 CEE 271: Applied Mechanics II, Dynamics Lecture 9: Ch.13, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa 2 / 40 EQUATIONS OF MOTION:RECTANGULAR COORDINATES
Translational vs Rotational. m x. Connection Δ = = = = = = Δ = = = = = = Δ =Δ = = = = = 2 / 1/2. Work
 Translational vs Rotational / / 1/ Δ m x v dx dt a dv dt F ma p mv KE mv Work Fd / / 1/ θ ω θ α ω τ α ω ω τθ Δ I d dt d dt I L I KE I Work / θ ω α τ Δ Δ c t s r v r a v r a r Fr L pr Connection Translational
Translational vs Rotational / / 1/ Δ m x v dx dt a dv dt F ma p mv KE mv Work Fd / / 1/ θ ω θ α ω τ α ω ω τθ Δ I d dt d dt I L I KE I Work / θ ω α τ Δ Δ c t s r v r a v r a r Fr L pr Connection Translational
PHY 1114: Physics I. Quick Question 1. Quick Question 2. Quick Question 3. Quick Question 4. Lecture 5: Motion in 2D
 PHY 1114: Physics I Lecture 5: Motion in D Fall 01 Kenny L. Tapp Quick Question 1 A child throws a ball vertically upward at the school playground. Which one of the following quantities is (are) equal
PHY 1114: Physics I Lecture 5: Motion in D Fall 01 Kenny L. Tapp Quick Question 1 A child throws a ball vertically upward at the school playground. Which one of the following quantities is (are) equal
3.2 Projectile Motion
 Motion in 2-D: Last class we were analyzing the distance in two-dimensional motion and revisited the concept of vectors, and unit-vector notation. We had our receiver run up the field then slant Northwest.
Motion in 2-D: Last class we were analyzing the distance in two-dimensional motion and revisited the concept of vectors, and unit-vector notation. We had our receiver run up the field then slant Northwest.
Circular Motion & Gravitation MC Question Database
 (Questions #4,5,6,27,37,38,42 and 58 each have TWO correct answers.) 1) A record player has four coins at different distances from the center of rotation. Coin A is 1 cm away, Coin B is 2 cm away. Coin
(Questions #4,5,6,27,37,38,42 and 58 each have TWO correct answers.) 1) A record player has four coins at different distances from the center of rotation. Coin A is 1 cm away, Coin B is 2 cm away. Coin
Kinetics of Particles
 Kinetics of Particles A- Force, Mass, and Acceleration Newton s Second Law of Motion: Kinetics is a branch of dynamics that deals with the relationship between the change in motion of a body and the forces
Kinetics of Particles A- Force, Mass, and Acceleration Newton s Second Law of Motion: Kinetics is a branch of dynamics that deals with the relationship between the change in motion of a body and the forces
Chapter Units and Measurement
 2 Chapter Units and Measurement 1. Identify the pair whose dimensions are equal [2002] torque and work stress and energy force and stress force and work 2. [2003] [L -1 T] ] [L -2 T 2 ] [L 2 T -2 ] [LT
2 Chapter Units and Measurement 1. Identify the pair whose dimensions are equal [2002] torque and work stress and energy force and stress force and work 2. [2003] [L -1 T] ] [L -2 T 2 ] [L 2 T -2 ] [LT
Chapter 3 Kinematics in Two Dimensions; Vectors
 Chapter 3 Kinematics in Two Dimensions; Vectors Vectors and Scalars Addition of Vectors Graphical Methods (One and Two- Dimension) Multiplication of a Vector by a Scalar Subtraction of Vectors Graphical
Chapter 3 Kinematics in Two Dimensions; Vectors Vectors and Scalars Addition of Vectors Graphical Methods (One and Two- Dimension) Multiplication of a Vector by a Scalar Subtraction of Vectors Graphical
Rotational Kinematics and Dynamics. UCVTS AIT Physics
 Rotational Kinematics and Dynamics UCVTS AIT Physics Angular Position Axis of rotation is the center of the disc Choose a fixed reference line Point P is at a fixed distance r from the origin Angular Position,
Rotational Kinematics and Dynamics UCVTS AIT Physics Angular Position Axis of rotation is the center of the disc Choose a fixed reference line Point P is at a fixed distance r from the origin Angular Position,
Chapter 2. Motion in One Dimension. Professor Wa el Salah
 Chapter 2 Motion in One Dimension Kinematics Describes motion while ignoring the external agents that might have caused or modified the motion For now, will consider motion in one dimension Along a straight
Chapter 2 Motion in One Dimension Kinematics Describes motion while ignoring the external agents that might have caused or modified the motion For now, will consider motion in one dimension Along a straight
PHYSICS 221, FALL 2009 EXAM #1 SOLUTIONS WEDNESDAY, SEPTEMBER 30, 2009
 PHYSICS 221, FALL 2009 EXAM #1 SOLUTIONS WEDNESDAY, SEPTEMBER 30, 2009 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively.
PHYSICS 221, FALL 2009 EXAM #1 SOLUTIONS WEDNESDAY, SEPTEMBER 30, 2009 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively.
C) D) 2. The diagram below shows a worker using a rope to pull a cart.
 D) 2. The diagram below shows a worker using a rope to pull a cart.") 1. Which graph best represents the relationship between the acceleration of an object falling freely near the surface of Earth and the time that it falls? 2. The diagram below shows a worker using a rope
1. Which graph best represents the relationship between the acceleration of an object falling freely near the surface of Earth and the time that it falls? 2. The diagram below shows a worker using a rope
Problem: Projectile (CM-1998)
") Physics C -D Kinematics Name: ANSWER KEY AP Review Packet Vectors have both magnitude and direction displacement, velocity, acceleration Scalars have magnitude only distance, speed, time, mass Unit vectors
Physics C -D Kinematics Name: ANSWER KEY AP Review Packet Vectors have both magnitude and direction displacement, velocity, acceleration Scalars have magnitude only distance, speed, time, mass Unit vectors
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2)
") PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PLANAR KINETIC EQUATIONS OF MOTION (Section 17.2) We will limit our study of planar kinetics to rigid bodies that are symmetric with respect to a fixed reference plane. As discussed in Chapter 16, when
PHYSICS. Chapter 8 Lecture FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E RANDALL D. KNIGHT Pearson Education, Inc.
 PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 8 Lecture RANDALL D. KNIGHT Chapter 8. Dynamics II: Motion in a Plane IN THIS CHAPTER, you will learn to solve problems about motion
PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 8 Lecture RANDALL D. KNIGHT Chapter 8. Dynamics II: Motion in a Plane IN THIS CHAPTER, you will learn to solve problems about motion
Faculty of Engineering and Department of Physics Engineering Physics 131 Midterm Examination Monday February 24, 2014; 7:00 pm 8:30 pm
 Faculty of Engineering and Department of Physics Engineering Physics 131 Midterm Examination Monday February 4, 014; 7:00 pm 8:30 pm 1. No notes or textbooks allowed.. Formula sheets are included (may
Faculty of Engineering and Department of Physics Engineering Physics 131 Midterm Examination Monday February 4, 014; 7:00 pm 8:30 pm 1. No notes or textbooks allowed.. Formula sheets are included (may
General Physics (PHY 170) Chap 2. Acceleration motion with constant acceleration. Tuesday, January 15, 13
 Chap 2. Acceleration motion with constant acceleration. Tuesday, January 15, 13") General Physics (PHY 170) Chap 2 Acceleration motion with constant acceleration 1 Average Acceleration Changing velocity (non-uniform) means an acceleration is present Average acceleration is the rate
General Physics (PHY 170) Chap 2 Acceleration motion with constant acceleration 1 Average Acceleration Changing velocity (non-uniform) means an acceleration is present Average acceleration is the rate
1. A baseball player throws a ball horizontally. Which statement best describes the ball's motion after it is thrown? [Neglect the effect of
 1. A baseball player throws a ball horizontally. Which statement best describes the ball's motion after it is thrown? [Neglect the effect of friction.] A) Its vertical speed remains the same, and its horizontal
1. A baseball player throws a ball horizontally. Which statement best describes the ball's motion after it is thrown? [Neglect the effect of friction.] A) Its vertical speed remains the same, and its horizontal
Chapter 3 Acceleration
 Chapter 3 Acceleration Slide 3-1 Chapter 3: Acceleration Chapter Goal: To extend the description of motion in one dimension to include changes in velocity. This type of motion is called acceleration. Slide
Chapter 3 Acceleration Slide 3-1 Chapter 3: Acceleration Chapter Goal: To extend the description of motion in one dimension to include changes in velocity. This type of motion is called acceleration. Slide
Physics I Exam 1 Fall 2014 (version A)
") 95.141 Physics I Exam 1 Fall 014 (version A) Section Number Section instructor Last/First Name (print) / Last 3 Digits of Student ID Number: Answer all questions, beginning each new question in the space
95.141 Physics I Exam 1 Fall 014 (version A) Section Number Section instructor Last/First Name (print) / Last 3 Digits of Student ID Number: Answer all questions, beginning each new question in the space
PHYSICS. Chapter 8 Lecture FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E RANDALL D. KNIGHT Pearson Education, Inc.
 PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 8 Lecture RANDALL D. KNIGHT Chapter 8. Dynamics II: Motion in a Plane IN THIS CHAPTER, you will learn to solve problems about motion
PHYSICS FOR SCIENTISTS AND ENGINEERS A STRATEGIC APPROACH 4/E Chapter 8 Lecture RANDALL D. KNIGHT Chapter 8. Dynamics II: Motion in a Plane IN THIS CHAPTER, you will learn to solve problems about motion
Trigonometry I. Pythagorean theorem: WEST VIRGINIA UNIVERSITY Physics
 Trigonometry I Pythagorean theorem: Trigonometry II 90 180 270 360 450 540 630 720 sin(x) and cos(x) are mathematical functions that describe oscillations. This will be important later, when we talk about
Trigonometry I Pythagorean theorem: Trigonometry II 90 180 270 360 450 540 630 720 sin(x) and cos(x) are mathematical functions that describe oscillations. This will be important later, when we talk about
( ) ( ) A i ˆj. What is the unit vector  that points in the direction of A? 1) The vector A is given by = ( 6.0m ) ˆ ( 8.0m ) Solution A D) 6 E) 6
 ( ) A i ˆj. What is the unit vector  that points in the direction of A? 1) The vector A is given by = ( 6.0m ) ˆ ( 8.0m ) Solution A D) 6 E) 6") A i ˆj. What is the unit vector  that points in the direction of A? 1) The vector A is given b ( 6.m ) ˆ ( 8.m ) A ˆ i ˆ ˆ j A ˆ i ˆ ˆ j C) A ˆ ( 1 ) ( i ˆ ˆ j) D) Aˆ.6 iˆ+.8 ˆj E) Aˆ.6 iˆ.8 ˆj A) (.6m
A i ˆj. What is the unit vector  that points in the direction of A? 1) The vector A is given b ( 6.m ) ˆ ( 8.m ) A ˆ i ˆ ˆ j A ˆ i ˆ ˆ j C) A ˆ ( 1 ) ( i ˆ ˆ j) D) Aˆ.6 iˆ+.8 ˆj E) Aˆ.6 iˆ.8 ˆj A) (.6m
Kinematics (2) - Motion in Three Dimensions
 - Motion in Three Dimensions") Kinematics (2) - Motion in Three Dimensions 1. Introduction Kinematics is a branch of mechanics which describes the motion of objects without consideration of the circumstances leading to the motion. 2.
Kinematics (2) - Motion in Three Dimensions 1. Introduction Kinematics is a branch of mechanics which describes the motion of objects without consideration of the circumstances leading to the motion. 2.
FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Saturday, 14 December 2013, 1PM to 4 PM, AT 1003
 FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Saturday, 14 December 2013, 1PM to 4 PM, AT 1003 NAME: STUDENT ID: INSTRUCTION 1. This exam booklet has 14 pages. Make sure none are missing 2. There is
FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Saturday, 14 December 2013, 1PM to 4 PM, AT 1003 NAME: STUDENT ID: INSTRUCTION 1. This exam booklet has 14 pages. Make sure none are missing 2. There is
PHYS 101 Previous Exam Problems. Force & Motion I
 PHYS 101 Previous Exam Problems CHAPTER 5 Force & Motion I Newton s Laws Vertical motion Horizontal motion Mixed forces Contact forces Inclines General problems 1. A 5.0-kg block is lowered with a downward
PHYS 101 Previous Exam Problems CHAPTER 5 Force & Motion I Newton s Laws Vertical motion Horizontal motion Mixed forces Contact forces Inclines General problems 1. A 5.0-kg block is lowered with a downward
ROTATIONAL KINEMATICS
 CHAPTER 8 ROTATIONAL KINEMATICS CONCEPTUAL QUESTIONS 1. REASONING AND SOLUTION The figures below show two axes in the plane of the paper and located so that the points B and C move in circular paths having
CHAPTER 8 ROTATIONAL KINEMATICS CONCEPTUAL QUESTIONS 1. REASONING AND SOLUTION The figures below show two axes in the plane of the paper and located so that the points B and C move in circular paths having
Rotational Kinematics
 Rotational Kinematics Rotational Coordinates Ridged objects require six numbers to describe their position and orientation: 3 coordinates 3 axes of rotation Rotational Coordinates Use an angle θ to describe
Rotational Kinematics Rotational Coordinates Ridged objects require six numbers to describe their position and orientation: 3 coordinates 3 axes of rotation Rotational Coordinates Use an angle θ to describe
Chapter 8 Lecture Notes
 Chapter 8 Lecture Notes Physics 2414 - Strauss Formulas: v = l / t = r θ / t = rω a T = v / t = r ω / t =rα a C = v 2 /r = ω 2 r ω = ω 0 + αt θ = ω 0 t +(1/2)αt 2 θ = (1/2)(ω 0 +ω)t ω 2 = ω 0 2 +2αθ τ
Chapter 8 Lecture Notes Physics 2414 - Strauss Formulas: v = l / t = r θ / t = rω a T = v / t = r ω / t =rα a C = v 2 /r = ω 2 r ω = ω 0 + αt θ = ω 0 t +(1/2)αt 2 θ = (1/2)(ω 0 +ω)t ω 2 = ω 0 2 +2αθ τ
Motion in 2- and 3-dimensions. Examples: non-linear motion (circles, planetary orbits, etc.) flight of projectiles (shells, golf balls, etc.
 flight of projectiles (shells, golf balls, etc.") Motion in 2- and 3-dimensions Examples: HPTER 3 MOTION IN TWO & THREE DIMENSIONS General properties of vectors the displacement vector position and velocity vectors acceleration vector equations of motion
Motion in 2- and 3-dimensions Examples: HPTER 3 MOTION IN TWO & THREE DIMENSIONS General properties of vectors the displacement vector position and velocity vectors acceleration vector equations of motion
Two-Dimensional. 8.7 Relative Motion CHAPTER 8
 CHAPTER 8 Two-Dimensional Motion 8.7 Relative Motion In Chapter 7, we reviewed the basic elements of one-dimensional rectilinear motion. In this chapter, we will consider only two-dimensional motion. In
CHAPTER 8 Two-Dimensional Motion 8.7 Relative Motion In Chapter 7, we reviewed the basic elements of one-dimensional rectilinear motion. In this chapter, we will consider only two-dimensional motion. In
Motion in Two or Three Dimensions
 Chapter 3 Motion in Two or Three Dimensions PowerPoint Lectures for University Physics, Thirteenth Edition Hugh D. Young and Roger A. Freedman Lectures by Wayne Anderson Goals for Chapter 3 To use vectors
Chapter 3 Motion in Two or Three Dimensions PowerPoint Lectures for University Physics, Thirteenth Edition Hugh D. Young and Roger A. Freedman Lectures by Wayne Anderson Goals for Chapter 3 To use vectors
An Overview of Mechanics
 An Overview of Mechanics Mechanics: The study of how bodies react to forces acting on them. Statics: The study of bodies in equilibrium. Dynamics: 1. Kinematics concerned with the geometric aspects of
An Overview of Mechanics Mechanics: The study of how bodies react to forces acting on them. Statics: The study of bodies in equilibrium. Dynamics: 1. Kinematics concerned with the geometric aspects of
ME3133: DYNAMICS EXAM #1- SPRING POINTS - CLOSED BOOKFORMULA SHEET ALLOWED
 ME3133: DYNAMICS EXAM #1- SPRING 1 1 POINTS - CLOSED BOOKFORMULA SHEET ALLOWED CLASS ID: Instructions: 1. SET CELL PHONES OFF/SILENT -- THEY ARE NOT TO BE USED DURING EXAM. FREE BODY DIAGRAMS or ACTIVE
ME3133: DYNAMICS EXAM #1- SPRING 1 1 POINTS - CLOSED BOOKFORMULA SHEET ALLOWED CLASS ID: Instructions: 1. SET CELL PHONES OFF/SILENT -- THEY ARE NOT TO BE USED DURING EXAM. FREE BODY DIAGRAMS or ACTIVE
CURVILINEAR MOTION: NORMAL AND TANGENTIAL COMPONENTS
 CURVILINEAR MOTION: NORMAL AND TANGENTIAL COMPONENTS Today s Objectives: Students will be able to: 1. Determine the normal and tangential components of velocity and acceleration of a particle traveling
CURVILINEAR MOTION: NORMAL AND TANGENTIAL COMPONENTS Today s Objectives: Students will be able to: 1. Determine the normal and tangential components of velocity and acceleration of a particle traveling
Page 1. Name:
 Name: 3834-1 - Page 1 1) If a woman runs 100 meters north and then 70 meters south, her total displacement is A) 170 m south B) 170 m north C) 30 m south D) 30 m north 2) The graph below represents the
Name: 3834-1 - Page 1 1) If a woman runs 100 meters north and then 70 meters south, her total displacement is A) 170 m south B) 170 m north C) 30 m south D) 30 m north 2) The graph below represents the
Describing motion: Kinematics in two dimension
 Describing motion: Kinematics in two dimension Scientist Galileo Galilei Issac Newton Vocabulary Vector scalars Resultant Displacement Components Resolving vectors Unit vector into its components Average
Describing motion: Kinematics in two dimension Scientist Galileo Galilei Issac Newton Vocabulary Vector scalars Resultant Displacement Components Resolving vectors Unit vector into its components Average
Tutorial (2) Subject: Curvilinear Motion A Cartesian Coordinates
 Subject: Curvilinear Motion A Cartesian Coordinates") Faculty of EMS Department: Mechatronics Course : MECHANICS II Prof. Dr. E. I. Morgan Tutorial () Subject: Curvilinear Motion A Cartesian Coordinates Prob. 1: [11.98] While delivering newspapers, a girl
Faculty of EMS Department: Mechatronics Course : MECHANICS II Prof. Dr. E. I. Morgan Tutorial () Subject: Curvilinear Motion A Cartesian Coordinates Prob. 1: [11.98] While delivering newspapers, a girl
CEE 271: Applied Mechanics II, Dynamics Lecture 23: Ch.16, Sec.7
 1 / 26 CEE 271: Applied Mechanics II, Dynamics Lecture 23: Ch.16, Sec.7 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Tuesday, Nov. 8, 2012 2 / 26 RELATIVE MOTION
1 / 26 CEE 271: Applied Mechanics II, Dynamics Lecture 23: Ch.16, Sec.7 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Tuesday, Nov. 8, 2012 2 / 26 RELATIVE MOTION
Dynamics Kinetics of a particle Section 4: TJW Force-mass-acceleration: Example 1
 Section 4: TJW Force-mass-acceleration: Example 1 The beam and attached hoisting mechanism have a combined mass of 1200 kg with center of mass at G. If the inertial acceleration a of a point P on the hoisting
Section 4: TJW Force-mass-acceleration: Example 1 The beam and attached hoisting mechanism have a combined mass of 1200 kg with center of mass at G. If the inertial acceleration a of a point P on the hoisting
ME 230 Kinematics and Dynamics
 ME 230 Kinematics and Dynamics Wei-Chih Wang Department of Mechanical Engineering University of Washington Lecture 6: Particle Kinetics Kinetics of a particle (Chapter 13) - 13.4-13.6 Chapter 13: Objectives
ME 230 Kinematics and Dynamics Wei-Chih Wang Department of Mechanical Engineering University of Washington Lecture 6: Particle Kinetics Kinetics of a particle (Chapter 13) - 13.4-13.6 Chapter 13: Objectives
Rotational Motion and the Law of Gravity 1
 Rotational Motion and the Law of Gravity 1 Linear motion is described by position, velocity, and acceleration. Circular motion repeats itself in circles around the axis of rotation Ex. Planets in orbit,
Rotational Motion and the Law of Gravity 1 Linear motion is described by position, velocity, and acceleration. Circular motion repeats itself in circles around the axis of rotation Ex. Planets in orbit,