Lecture2 The implicit function theorem. Bifurcations.
|
|
|
- Kristopher Pope
- 6 years ago
- Views:
Transcription
1 Lecture2 The implicit function theorem. Bifurcations.
2 1 Review:Newton s method. The existence theorem - the assumptions. Basins of attraction. 2 The implicit function theorem. 3 Bifurcations of iterations. Attractors and repellers The fold. The period doubling bifurcation. 4 Graphical iteration.
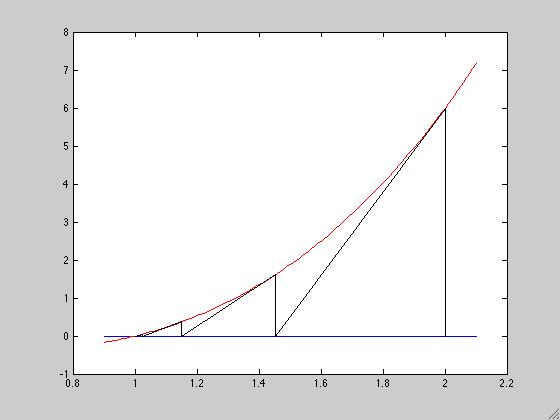
3 Newton s method. This is an algorithm to find the zeros of a function P = P(x). Starting with an initial point x 0 inductively define (or rather try to define) x n+1 = x n P(x n) P (x n ). (1)
4 Recall the graphic illustration of Newton s method: Notice that what we are doing is taking the tangent to the curve at the point (x, y) and then taking as our next point, the intersection of this tangent with the x-axis. This makes the method easy to remember.
5 T
6 A fixed point of the iteration scheme is a solution to our problem. Also notice that if x is a fixed point of this iteration scheme, i.e. if x = x P(x) P (x) then P(x) = 0 and we have a solution to our problem. To the extent that x n+1 is close to x n we will be close to a solution (the degree of closeness depending on the size of P(x n )).
7 The existence theorem - the assumptions. For the purposes of formulation and proof, in order to simplify the notation, let us assume that we have shifted our coordinates so as to take x 0 = 0. Also let B = {x : x 1}. We need to assume that P (x) is nowhere zero, and that P (x) is bounded. In fact, we assume that there is a constant K such that P (x) 1 K, P (x) K, x B. (2)
8 The existence theorem - the assumptions. We proved: Proposition. Let τ = 3 2 and choose the K in (2) so that K 23/4. Let c = 8 ln K. 3 Then if P(0) K 5 (3) the recursion (1) starting with x 0 = 0 satisfies x n B n (4) and x n x n 1 e cτ n. (5)
9 The existence theorem - the assumptions. A more general theorem. To prove: and x n B n (4) x n x n 1 e cτ n. (5) In fact, we will prove a somewhat more general result. So we will let τ be any real number satisfying 1 < τ < 2 and we will choose c in terms of K and τ to make the proof work. First of all we notice that (4) is a consequence of (5) if c is sufficiently large. In fact, so x j = (x j x j 1 ) + + (x 1 x 0 )
10 The existence theorem - the assumptions. x j x j x j x 1 x 0. Using (5) for each term on the right gives x j j e cτ n < 1 e cτ n < 1 e cn(τ 1) = 1 e c(τ 1) 1 e c(τ 1). Here the third inequality follows from writing by the binomial formula τ = 1 + (τ 1) so τ n = 1 + n(τ 1) + > n(τ 1) since τ > 1. The equality is obtained by summing the geometric series.
11 The existence theorem - the assumptions. x j e c(τ 1) 1 e c(τ 1). So if we choose c sufficiently large that e c(τ 1) 1 (6) 1 e c(τ 1) (4) follows from (5). This choice of c is conditioned by our choice of τ. But at least we now know that if we can arrange that (5) holds, then by choosing a possibly larger value of c (and if we can still prove that (5) continues to hold) we can guarantee that the algorithm keeps going.
12 The existence theorem - the assumptions. So let us try to prove (5) by induction. If we assume it is true for n, we may write x n+1 x n = S n P(x n ) where we set S n = P (x n ) 1. (7) We use the first inequality in (2) which says that P (x) 1 K, and the definition (1) for the case n 1 (which says that x n = x n 1 S n 1 P(x n 1 )) to get S n P(x n ) K P(x n 1 S n 1 P(x n 1 )). (8)
13 The existence theorem - the assumptions. S n P(x n ) K P(x n 1 S n 1 P(x n 1 )). (8) Taylor s formula with remainder says that for any twice continuously differentiable function f, f (y+h) = f (y)+f (y)h+r(y, h) where R(y, h) 1 2 sup f (z) h 2 z where the supremum is taken over the interval between y and y + h. If we use Taylor s formula with remainder with f = P, y = P(x n 1 ), and h = S n 1 P(x n 1 ) = x n x n 1 and the second inequality in (2) to estimate the second derivative, we obtain P(x n 1 S n 1 P(x n 1 )) P(x n 1 ) P (x n 1 )S n 1 P(x n 1 ) + K x n x n 1 2.
14 The existence theorem - the assumptions. P(x n 1 S n 1 P(x n 1 )) P(x n 1 ) P (x n 1 )S n 1 P(x n 1 ) + K x n x n 1 2. Substituting this inequality into (8), we get x n+1 x n K P(x n 1 ) P (x n 1 )S n 1 P(x n 1 ) + K 2 x n x n 1 2. (9) Now since S n 1 = P (x n 1 ) 1 the first term on the right vanishes and we get x n+1 x n K 2 x n x n 1 2 K 2 e 2cτ n.
15 The existence theorem - the assumptions. Choosing c so that the induction works. x n+1 x n K 2 x n x n 1 2 K 2 e 2cτ n. So in order to pass from n to n + 1 in (5) we must have K 2 e 2cτ n cτ n+1 e or K 2 e c(2 τ)τ. (10) Since τ < 2 we can arrange for this last inequality to hold if we choose c sufficiently large.
16 The existence theorem - the assumptions. Getting started. To get started, we must verify (5) for n = 1 This says S 0 P(0) e cτ or So we have proved: P(0) e cτ K. (11)
17 The existence theorem - the assumptions. Theorem P (x) 1 K, P (x) K, x B. (2) e c(τ 1) 1 (6) 1 e c(τ 1) K 2 e c(2 τ)τ. (10) P(0) e cτ K. (11) Suppose that (2) holds and we have chosen K and c so that (6) and (10) hold. Then if P(0) satisfies (11) the Newton iteration scheme converges exponentially in the sense that (5) holds. x n x n 1 e cτ n. (5)
18 The existence theorem - the assumptions. If we choose τ = 3 2 as in the proposition, let c be given by K 2 = e 3c/4 so that (10) just holds. This is our choice in the proposition. The inequality K 2 3/4 implies that e 3c/4 4 3/4 or This implies that so (6) holds. Then e c 4. e c/2 1 2 e cτ = e 3c/2 = K 4 so (11) becomes P(0) K 5 completing the proof of the proposition.
19 The existence theorem - the assumptions. Review. We have put in all the gory details, but it is worth reviewing the guts of the argument, and seeing how things differ from the special case of finding the square root. Our algorithm is x n+1 = x n S n [P(x n )] (12) where S n is chosen as (7). Taylor s formula gave (9) and with the choice (7) we get x n+1 x n K 2 x n x n 1 2. (13)
20 The existence theorem - the assumptions. In contrast to the square root algorithm, we can t conclude that the error vanishes as r τ n with τ = 2. But we can arrange that we eventually have such exponential convergence with any τ < 2.
21 Basins of attraction. The more decisive difference has to do with the basins of attraction of the solutions. For the square root, starting with any positive number ends us up with the positive square root. Every negative number leads us to the negative square root. So the basin of attraction of the positive square root is the entire positive half axis, and the basin of attraction of the negative square root is the entire negative half axis. The only bad point belonging to no basin of attraction is the point 0. Even for cubic polynomials the global behavior of Newton s method is extraordinarily complicated, as we saw last time.
22 Verifying the conditions. Let us return to the positive aspect of Newton s method. You might ask, how can we ever guarantee in advance that an inequality such as (3) holds? The answer comes from considering not a single function, P, but rather a parameterized family of functions: Suppose that u ranges over some interval, or more generally, over some region in a vector space. To fix the notation, suppose that this region contains the origin, 0. Suppose that P is a function of u and x, and depends continuously on (u, x). Suppose that as a function of x, the function P is twice differentiable and satisfies (2) for all values of u (with the same fixed K). ( ) P 1 x K, 2 P (x) 2 K, x B, u. (2)
23 Finally, suppose that P(0, 0) = 0. (14) Then the continuity of P guarantees that for u and x 0 sufficiently small, the condition (3) holds, that is P(u, x 0 ) < r where r is small enough to guarantee that x 0 is in the basin of attraction of a zero of the function P(u, )
24 In particular, this means that for u sufficiently small, we can find an ɛ > 0 such that all x 0 satisfying x 0 < ɛ are in the basin of attraction of the same zero of P(u, ). By choosing a smaller neighborhood, given say by u < δ, starting with x 0 = 0 and applying Newton s method to P(u, ), we obtain a sequence of x values which converges exponentially to a solution of P(u, x) = 0. (15) satisfying x < ɛ.
25 The implicit function theorem. Furthermore, starting with any x 0 satisfying x 0 < ɛ we also get exponential convergence to the same zero. In particular, there can not be two distinct solutions to (15) satisfying x < ɛ, since starting Newton s method at a zero gives (inductively) x n = x 0 for all n. Thus we have constructed a unique function x = g(u) satisfying P(u, g(u)) 0. (16) This is the guts of the implicit function theorem.
26 This is the guts of the implicit function theorem. We have proved it under assumptions which involve the second derivative of P which are not necessary for the truth of the theorem. (We will remedy this later in the course.) However these stronger assumptions that we have made do guarantee exponential convergence of our algorithm. For the sake of completeness, we discuss the basic properties of the function g: its continuity, differentiability, and the computation of its derivative.
27 Continuity of the implicit function, g. We wish to prove that g is continuous at any point u in a neighborhood of 0. This means: given β > 0 we can find α > 0 such that h < α g(u + h) g(u) < β. (17) We know that this is true at u = 0, where we could choose any ɛ > 0 at will, and then conclude that there is a δ > 0 with g(u) < ɛ if u < δ.
28 Uniqueness implies continuity at a general point. To prove: given β > 0 we can find α > 0 such that h < α g(u + h) g(u) < β. (17) To prove (17) at a general point, just choose (u, g(u)) instead of (0, 0) as the origin of our coordinates, and apply the preceding results to this new data. We obtain a solution f to the equation P(u + h, f (u + h)) = 0 with f (u) = g(u) which is continuous at h = 0. In particular, for h sufficiently small, we will have u + h δ, and f (u + h) < ɛ, our original ɛ and δ in the definition of g. The uniqueness of the solution to our original equation then implies that f (u + h) = g(u + h), proving (17).
29 Differentiability of g. Suppose that P is continuously differentiable with respect to all variables. We have 0 P(u + h, g(u + h)) P(u, g(u) so, by the definition of the derivative, 0 = P u h + P [g(u + h) g(u)] + o(h) + o[g(u + h) g(u)]. x If u is a vector variable, say R n, then P u is a matrix. The terminology o(s) means some expression which approaches zero so that o(s)/s 0. So [ ] P 1 [ ] [ ] P P 1 g(u+h) g(u) = h o(h) o[g(u+h) g(u)]. x u x (18)
30 g(u+h) g(u) = [ P x ] 1 [ ] P h o(h) u [ ] P 1 o[g(u+h) g(u)]. x As a first pass through this equation, observe that by the continuity that we have already proved, we know that [g(u + h) g(u)] 0 as h 0. The expression o([g(u + h) g(u)]) is, by definition of o, smaller than any constant times g(u + h) g(u) provided that g(u + h) g(u) itself is sufficiently small. This means that for sufficiently small [g(u + h) g(u)] we have o[g(u + h) g(u)] 1 g(u + h) g(u) 2K where we may choose K so that [ ] P 1 x K.
31 g(u+h) g(u) = [ P x ] 1 [ ] P h o(h) u [ ] P 1 o[g(u+h) g(u)]. x o[g(u + h) g(u)] 1 g(u + h) g(u) 2K where we may choose K so that [ ] P 1 x K. So bringing the last term over to the other side gives g(u+h) g(u) 1 [ ] P 1 [ ] P 2 g(u+h) g(u) h +o( h ), x u and we get an estimate of the form for some suitable constant, M. g(u + h) g(u) M h
32 g(u+h) g(u) = [ P x ] 1 [ ] P h o(h) u g(u + h) g(u) M h. [ ] P 1 o[g(u+h) g(u)]. x So the term o[g(u + h) g(u)] becomes o(h). Plugging this back into our equation (18) shows that g is differentiable with g u = [ P x ] 1 [ ] P. (19) u
33 To summarize, the implicit function theorem says: Theorem The implicit function theorem. Let P = P(u, x) be a differentiable function with P(0, 0) = 0 and [ ] P x (0, 0) invertible. Then there exist δ > 0 and ɛ > 0 such that P(u, x) = 0 has a unique solution with x < ɛ for each u < δ. This defines the function x = g(u). The function g is differentiable and its derivative is given by (19). g u = [ P x ] 1 [ ] P. (19) u
34 [ ] g P 1 [ ] P u =. (19) x u We have proved the theorem under more stringent hypotheses in order to get an exponential rate of convergence to the solution. We will provide the details of the more general version, as a consequence of the contraction fixed point theorem, later on. We should point out now, however, that nothing in our discussion of Newton s method or the implicit function theorem depended on x being a single real variable. The entire discussion goes through unchanged if x is a vector variable. Then P/ x is a matrix, and (19) must be understood as matrix multiplication. Similarly, the condition on the second derivative of p must be understood in terms of matrix norms. We will return to these points later. For now I want to give some interesting applications of the implicit function theorem.
35 Over the next few lectures I want to study the behavior of iterations of a map of an interval of the real line into the real line. But we will let this map depend on a parameter. So we will be studying the iteration (in x) of a function, F, of two real variables x and µ. We will need to make various hypothesis concerning the differentiability of F. We will always assume it is at least C 2 (has continuous partial derivatives up to the second order). We may also need C 3 in which case we explicitly state this hypothesis. We write F µ (x) = F (x, µ) and are interested in the change of behavior of F µ as µ varies.
36 The logistic family. A very famous example is the logistic family of maps, where F (x, µ) = µx(1 x). For any fixed value of µ, the maximum of F (x, µ) as a function of x is achieved at x = 1 2 and the maximum value is 1 4 µ. On the other hand, F (x, µ) 0 when µ 0 and 0 x 1. So for any value of µ with 0 µ 4, the map x F µ (x) maps the unit interval into itself. But, as many of you have undoubtedly seen, the behavior of this map changes drastically as µ varies. I plan to study this example in detail in the next lecture.
37 Attractors and repellers A single map. Let me begin by studying the case of a single map. In other words we are holding µ fixed. Here is some notation which we will be using for the next few lectures: Let f : X X be a differentiable map where X is an interval on the real line. A point p X is called a fixed point if f (p) = p.
38 Attractors and repellers Attractive fixed points. A fixed point a is called an attractor or an attractive fixed point or a stable fixed point if f (a) < 1. (20) The reason for this terminology is that points sufficiently close to an attractive fixed point, a, converge to a geometrically upon iteration.
39 Attractors and repellers An attractive fixed point attracts nearby points. Points sufficiently close to an attractive fixed point, a, converge to a geometrically upon iteration. Indeed, f (x) a = f (x) f (a) = f (a)(x a) + o(x a) by the definition of the derivative. Hence taking b < 1 to be any number larger than f (a) then for x a sufficiently small, f (x) a b x a. So starting with x 0 = x and iterating x n+1 = f (x n ) gives a sequence of points with x n a b n x a.
40 Attractors and repellers The basin of attraction. The basin of attraction of an attractive fixed point is the set of all x such that the sequence {x n } converges to a where x 0 = x and x n+1 = f (x n ). Thus the basin of attraction of an attractive fixed point a will always include a neighborhood of a, but it may also include points far away, and may be a very complicated set as we saw in the example of Newton s method applied to a cubic.
41 Attractors and repellers Repellers. A fixed point, r, is called a repeller or a repelling or an unstable fixed point if f (r) > 1. (21) Points near a repelling fixed point are pushed away upon iteration.
42 Attractors and repellers Superattractors. An attractive fixed point s with f (s) = 0 (22) is called superattractive or superstable. Near a superstable fixed point, s, the iterates converge faster than any geometrical rate to s.
43 Attractors and repellers For example, in Newton s method, so f (x) = x P(x) P (x) f (x) = 1 P (x) P (x) + P(x)P (x) (P (x) 2 = P(x)P (x) P (x) 2. So if a is a zero of P, then it is a superattractive fixed point.
44 Attractors and repellers Notation for iteration. The notation f n will mean the n-fold composition, f n = f f f (ntimes).
45 Attractors and repellers Periodic points. A fixed point of f n is called a periodic point of period n. If p is a periodic point of period n, then so are each of the points p, f (p), f 2 (p),..., f (n 1) (p) and the chain rule says that at each of these points the derivative of f n is the same and is given by (f n ) (p) = f (p)f (f (p)) f (f (n 1) (p)). If any one of these points is an attractive fixed point for f n then so are all the others. We speak of an attractive periodic orbit. Similarly for repelling.
46 Attractors and repellers A periodic point will be superattractive for f n if and only if at least one of the points p, f (p),... f (n 1) (p) satisfies f ( q) = 0.
47 Attractors and repellers Repeat of hypotheses. We will be studying the iteration (in x) of a function, F, of two real variables x and µ. We will need to make various hypothesis concerning the differentiability of F. We will always assume it is at least C 2 (has continuous partial derivatives up to the second order). We may also need C 3 in which case we explicitly state this hypothesis. We write F µ (x) = F (x, µ) and are interested in the change of behavior of F µ as µ varies.
48 Attractors and repellers Stability of attractors or repellors. Before embarking on the study of bifurcations let us observe that if p is a fixed point of F µ and F µ(p) 1, then for ν close to µ, the transformation F ν has a unique fixed point close to p. Indeed, the implicit function theorem applies to the function P(x, ν) := F (x, ν) x since P (p, µ) 0 x by hypothesis. We conclude that there is a curve of fixed points x(ν) with x(µ) = p.
49 The fold. The fold bifurcation. The first type of bifurcation we study is the fold bifurcation where there is no (local) fixed point on one side of the bifurcation value, b, where a fixed point p appears at µ = b with F µ(p) = 1, and at the other side of b the map F µ has two fixed points, one attracting and the other repelling.
50 The fold. Example: the quadratic family. As an example consider the quadratic family Q(x, µ) = Q µ (x) := x 2 + µ. Fixed points must be solutions of the quadratic equation x 2 x + µ = 0, whose roots are p ± = 1 2 ± µ. So for µ > 1 4 there are no real fixed points. At µ = 1 4 there is a single fixed point at x = 1 2. Since f (x) = 2x, we have f ( 1 2) = 1. For µ slightly less than 1 4 there are two fixed points, one at slightly more than 1 2 where the derivative is > 1 and so is repelling, and one at slightly less than 1 2 which is an attractor.

51 The fold. The quadratic family at µ =.5,.25, and 0. Remember that a fixed point of f is a point where the graph of f intersects the line y = x.
52 The fold. We will now discuss the general phenomenon. In order not to clutter up the notation, we assume that coordinates have been chosen so that b = 0 and p = 0. So we make the standing assumption that p = 0 is a fixed point at µ = 0, i.e. that F (0, 0) = 0.
53 The fold. Theorem (Fold bifurcation). Suppose that at the point (0, 0) we have (a) F x (0, 0) = 1, (b) 2 F F (0, 0) > 0, (c) (0, 0) > 0. x 2 µ Then there are non-empty intervals (µ 1, 0) and (0, µ 2 ) and ɛ > 0 so that (i) If µ (µ 1, 0) then F µ has two fixed points in ( ɛ, ɛ). One is attracting and the other repelling. (ii) If µ (0, µ 2 ) then F µ has no fixed points in ( ɛ, ɛ).
54 The fold. Proof of the fold bifurcation theorem, I. All the proofs in this section will be applications of the implicit function theorem. For our current theorem, set P(x, µ) := F (x, µ) x. Then by our standing hypothesis we have and condition (c) says that P(0, 0) = 0 P (0, 0) > 0. µ The implicit function theorem gives a unique function µ(x) with µ(0) = 0 and P(x, µ(x)) 0.
55 The fold. Proof of the fold bifurcation theorem, II. The implicit function theorem gives a unique function µ(x) with µ(0) = 0 and P(x, µ(x)) 0. The formula for the derivative in the implicit function theorem gives µ (x) = P/ x P/ µ which vanishes at the origin by assumption (a). We then may compute the second derivative, µ, via the chain rule; using the fact that µ (0) = 0 we obtain µ (0) = 2 P/ x 2 (0, 0). P/ µ This is negative by assumptions (b) and (c).
56 The fold. Proof of the fold bifurcation theorem, III. In other words, µ (0) = 0, and µ (0) < 0 so µ(x) has a maximum at x = 0, and this maximum value is 0. In the (x, µ) plane, the graph of µ(x) looks locally approximately like a parabola in the lower half plane with its apex at the origin. If we rotate this picture clockwise by ninety degrees, this says that there are no points on this curve sitting over positive µ values, i.e. no fixed points for positive µ, and two fixed points for µ < 0.
57 The fold. Graph of the function x µ(x).
58 The fold. Rotated figure.
59 The fold. Proof of the fold bifurcation theorem, IV We have established that for µ small there are two fixed points for µ < 0 and no fixed points for µ > 0. We must now show that one of these fixed points is attracting and the other repelling. For this, consider the function F x (x, µ(x)). The derivative of this function with respect to x is 2 F x 2 (x, µ(x)) + 2 F x µ (x, µ(x))µ (x). Assumption (b) says that 2 F x 2 (0, 0) > 0, and we know that µ (0) = 0. So the above expression is positive at 0.
60 The fold. Completion of the proof of the fold bifurcation theorem. We know that F x (x, µ(x)) is an increasing function in a neighborhood of the origin while F x (0, 0) = 1. But this says that on the lower fixed point and F µ(x) < 1 F µ(x) > 1 at the upper fixed point, completing the proof of the theorem.
61 The fold. In conditions (b) and (c) of the theorem, we could have allowed (separately) negative instead of positive values. This allows for the possibility that the two fixed points appear to the right (instead of the left) of the origin and that the upper (rather that the lower) fixed point is the attractor.
62 The period doubling bifurcation. Description of the period doubling bifurcation. The fold bifurcation arises when the parameter µ passes through a value where F µ (x) = x and F µ(x) = 1. Under the appropriate hypotheses, the period doubling bifurcation describes what happens when µ passes through a bifurcation value b where F b (x) = x and F µ(x) = 1. On one side of b there is a single attractive fixed point. On the other side the attractive fixed point has become a repelling fixed point, and an attractive periodic point of period two has arisen. This is illustrated in the figure in the next frame.
63 The period doubling bifurcation " attracting double point repelling fixed point!! attracting fixed point µ
64 The period doubling bifurcation. I will give the statement and proof of the period doubling bifurcation after we have given one of the most famous examples of this phenomenon - the case of the logistic family.
65 Iteration for kindergarten. Suppose that we have drawn a graph of the map f, and have also drawn the x-axis and the diagonal line y = x. The iteration of f starting with an initial point x 0 on the x-axis can be visualized as follows: Draw the vertical line from x 0 until it hits the graph (at (x 0, f (x 0 )). Draw the horizontal line to the diagonal (at f (x 0 ), f (x 0 )). Call this new x value x 1, so x 1 = f (x 0 ). Draw the vertical line to the graph (at (x 1, f (x 1 )). Continue. We illustrate this for the graphical iteration of the quadratic map f (x) = x starting with the initial point.75. Notice that we are moving away from the unstable fixed point.
66 The first few steps of the graphical iteration, leading away from the repelling fixed point.
67 More iterations lead to the attractive fixed point.
Lecture3 The logistic family.
 Lecture3 The logistic family. 1 The logistic family. The scenario for 0 < µ 1. The scenario for 1 < µ 3. Period doubling bifurcations in the logistic family. 2 The period doubling bifurcation. The logistic
Lecture3 The logistic family. 1 The logistic family. The scenario for 0 < µ 1. The scenario for 1 < µ 3. Period doubling bifurcations in the logistic family. 2 The period doubling bifurcation. The logistic
Dynamical Systems. Shlomo Sternberg
 Dynamical Systems Shlomo Sternberg May 1, 2011 2 Contents 1 Iteration and fixed points. 9 1.1 Square roots.............................. 9 1.1.1 Analyzing the steps..................... 9 1.2 Newton s
Dynamical Systems Shlomo Sternberg May 1, 2011 2 Contents 1 Iteration and fixed points. 9 1.1 Square roots.............................. 9 1.1.1 Analyzing the steps..................... 9 1.2 Newton s
v n+1 = v T + (v 0 - v T )exp(-[n +1]/ N )
![v n+1 = v T + (v 0 - v T )exp(-[n +1]/ N )](/thumbs/87/97076064.jpg "v n+1 = v T + (v 0 - v T )exp(-[n +1]/ N )") Notes on Dynamical Systems (continued) 2. Maps The surprisingly complicated behavior of the physical pendulum, and many other physical systems as well, can be more readily understood by examining their
Notes on Dynamical Systems (continued) 2. Maps The surprisingly complicated behavior of the physical pendulum, and many other physical systems as well, can be more readily understood by examining their
Module 5 : Linear and Quadratic Approximations, Error Estimates, Taylor's Theorem, Newton and Picard Methods
 Module 5 : Linear and Quadratic Approximations, Error Estimates, Taylor's Theorem, Newton and Picard Methods Lecture 14 : Taylor's Theorem [Section 141] Objectives In this section you will learn the following
Module 5 : Linear and Quadratic Approximations, Error Estimates, Taylor's Theorem, Newton and Picard Methods Lecture 14 : Taylor's Theorem [Section 141] Objectives In this section you will learn the following
MATH 614 Dynamical Systems and Chaos Lecture 2: Periodic points. Hyperbolicity.
 MATH 614 Dynamical Systems and Chaos Lecture 2: Periodic points. Hyperbolicity. Orbit Let f : X X be a map defining a discrete dynamical system. We use notation f n for the n-th iteration of f defined
MATH 614 Dynamical Systems and Chaos Lecture 2: Periodic points. Hyperbolicity. Orbit Let f : X X be a map defining a discrete dynamical system. We use notation f n for the n-th iteration of f defined
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
Solutions to homework Assignment #6 Math 119B UC Davis, Spring 2012
 Problems 1. For each of the following maps acting on the interval [0, 1], sketch their graphs, find their fixed points and determine for each fixed point whether it is asymptotically stable (a.k.a. attracting),
Problems 1. For each of the following maps acting on the interval [0, 1], sketch their graphs, find their fixed points and determine for each fixed point whether it is asymptotically stable (a.k.a. attracting),
Slope Fields: Graphing Solutions Without the Solutions
 8 Slope Fields: Graphing Solutions Without the Solutions Up to now, our efforts have been directed mainly towards finding formulas or equations describing solutions to given differential equations. Then,
8 Slope Fields: Graphing Solutions Without the Solutions Up to now, our efforts have been directed mainly towards finding formulas or equations describing solutions to given differential equations. Then,
11.11 Applications of Taylor Polynomials. Copyright Cengage Learning. All rights reserved.
 11.11 Applications of Taylor Polynomials Copyright Cengage Learning. All rights reserved. Approximating Functions by Polynomials 2 Approximating Functions by Polynomials Suppose that f(x) is equal to the
11.11 Applications of Taylor Polynomials Copyright Cengage Learning. All rights reserved. Approximating Functions by Polynomials 2 Approximating Functions by Polynomials Suppose that f(x) is equal to the
X. Numerical Methods
 X. Numerical Methods. Taylor Approximation Suppose that f is a function defined in a neighborhood of a point c, and suppose that f has derivatives of all orders near c. In section 5 of chapter 9 we introduced
X. Numerical Methods. Taylor Approximation Suppose that f is a function defined in a neighborhood of a point c, and suppose that f has derivatives of all orders near c. In section 5 of chapter 9 we introduced
MATH 415, WEEKS 14 & 15: 1 Recurrence Relations / Difference Equations
 MATH 415, WEEKS 14 & 15: Recurrence Relations / Difference Equations 1 Recurrence Relations / Difference Equations In many applications, the systems are updated in discrete jumps rather than continuous
MATH 415, WEEKS 14 & 15: Recurrence Relations / Difference Equations 1 Recurrence Relations / Difference Equations In many applications, the systems are updated in discrete jumps rather than continuous
Richard S. Palais Department of Mathematics Brandeis University Waltham, MA The Magic of Iteration
 Richard S. Palais Department of Mathematics Brandeis University Waltham, MA 02254-9110 The Magic of Iteration Section 1 The subject of these notes is one of my favorites in all mathematics, and it s not
Richard S. Palais Department of Mathematics Brandeis University Waltham, MA 02254-9110 The Magic of Iteration Section 1 The subject of these notes is one of my favorites in all mathematics, and it s not
One Dimensional Dynamical Systems
 16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
Newton s Method and Linear Approximations
 Newton s Method and Linear Approximations Curves are tricky. Lines aren t. Newton s Method and Linear Approximations Newton s Method for finding roots Goal: Where is f (x) = 0? f (x) = x 7 + 3x 3 + 7x
Newton s Method and Linear Approximations Curves are tricky. Lines aren t. Newton s Method and Linear Approximations Newton s Method for finding roots Goal: Where is f (x) = 0? f (x) = x 7 + 3x 3 + 7x
2 Dynamics of One-Parameter Families
 Dynamics, Chaos, and Fractals (part ): Dynamics of One-Parameter Families (by Evan Dummit, 015, v. 1.5) Contents Dynamics of One-Parameter Families 1.1 Bifurcations in One-Parameter Families..................................
Dynamics, Chaos, and Fractals (part ): Dynamics of One-Parameter Families (by Evan Dummit, 015, v. 1.5) Contents Dynamics of One-Parameter Families 1.1 Bifurcations in One-Parameter Families..................................
8.5 Taylor Polynomials and Taylor Series
 8.5. TAYLOR POLYNOMIALS AND TAYLOR SERIES 50 8.5 Taylor Polynomials and Taylor Series Motivating Questions In this section, we strive to understand the ideas generated by the following important questions:
8.5. TAYLOR POLYNOMIALS AND TAYLOR SERIES 50 8.5 Taylor Polynomials and Taylor Series Motivating Questions In this section, we strive to understand the ideas generated by the following important questions:
UNC Charlotte Super Competition Level 3 Test March 4, 2019 Test with Solutions for Sponsors
 . Find the minimum value of the function f (x) x 2 + (A) 6 (B) 3 6 (C) 4 Solution. We have f (x) x 2 + + x 2 + (D) 3 4, which is equivalent to x 0. x 2 + (E) x 2 +, x R. x 2 + 2 (x 2 + ) 2. How many solutions
. Find the minimum value of the function f (x) x 2 + (A) 6 (B) 3 6 (C) 4 Solution. We have f (x) x 2 + + x 2 + (D) 3 4, which is equivalent to x 0. x 2 + (E) x 2 +, x R. x 2 + 2 (x 2 + ) 2. How many solutions
Lecture 9 Metric spaces. The contraction fixed point theorem. The implicit function theorem. The existence of solutions to differenti. equations.
 Lecture 9 Metric spaces. The contraction fixed point theorem. The implicit function theorem. The existence of solutions to differential equations. 1 Metric spaces 2 Completeness and completion. 3 The contraction
Lecture 9 Metric spaces. The contraction fixed point theorem. The implicit function theorem. The existence of solutions to differential equations. 1 Metric spaces 2 Completeness and completion. 3 The contraction
SYSTEMS OF NONLINEAR EQUATIONS
 SYSTEMS OF NONLINEAR EQUATIONS Widely used in the mathematical modeling of real world phenomena. We introduce some numerical methods for their solution. For better intuition, we examine systems of two
SYSTEMS OF NONLINEAR EQUATIONS Widely used in the mathematical modeling of real world phenomena. We introduce some numerical methods for their solution. For better intuition, we examine systems of two
Fundamentals of Dynamical Systems / Discrete-Time Models. Dr. Dylan McNamara people.uncw.edu/ mcnamarad
 Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Lecture 11 Hyperbolicity.
 Lecture 11 Hyperbolicity. 1 C 0 linearization near a hyperbolic point 2 invariant manifolds Hyperbolic linear maps. Let E be a Banach space. A linear map A : E E is called hyperbolic if we can find closed
Lecture 11 Hyperbolicity. 1 C 0 linearization near a hyperbolic point 2 invariant manifolds Hyperbolic linear maps. Let E be a Banach space. A linear map A : E E is called hyperbolic if we can find closed
Dynamical Systems and Chaos Part I: Theoretical Techniques. Lecture 4: Discrete systems + Chaos. Ilya Potapov Mathematics Department, TUT Room TD325
 Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
THE INVERSE FUNCTION THEOREM
 THE INVERSE FUNCTION THEOREM W. PATRICK HOOPER The implicit function theorem is the following result: Theorem 1. Let f be a C 1 function from a neighborhood of a point a R n into R n. Suppose A = Df(a)
THE INVERSE FUNCTION THEOREM W. PATRICK HOOPER The implicit function theorem is the following result: Theorem 1. Let f be a C 1 function from a neighborhood of a point a R n into R n. Suppose A = Df(a)
ROOT FINDING REVIEW MICHELLE FENG
 ROOT FINDING REVIEW MICHELLE FENG 1.1. Bisection Method. 1. Root Finding Methods (1) Very naive approach based on the Intermediate Value Theorem (2) You need to be looking in an interval with only one
ROOT FINDING REVIEW MICHELLE FENG 1.1. Bisection Method. 1. Root Finding Methods (1) Very naive approach based on the Intermediate Value Theorem (2) You need to be looking in an interval with only one
Section 3.1 Quadratic Functions
 Chapter 3 Lecture Notes Page 1 of 72 Section 3.1 Quadratic Functions Objectives: Compare two different forms of writing a quadratic function Find the equation of a quadratic function (given points) Application
Chapter 3 Lecture Notes Page 1 of 72 Section 3.1 Quadratic Functions Objectives: Compare two different forms of writing a quadratic function Find the equation of a quadratic function (given points) Application
2. FUNCTIONS AND ALGEBRA
 2. FUNCTIONS AND ALGEBRA You might think of this chapter as an icebreaker. Functions are the primary participants in the game of calculus, so before we play the game we ought to get to know a few functions.
2. FUNCTIONS AND ALGEBRA You might think of this chapter as an icebreaker. Functions are the primary participants in the game of calculus, so before we play the game we ought to get to know a few functions.
Math 163: Lecture notes
 Math 63: Lecture notes Professor Monika Nitsche March 2, 2 Special functions that are inverses of known functions. Inverse functions (Day ) Go over: early exam, hw, quizzes, grading scheme, attendance
Math 63: Lecture notes Professor Monika Nitsche March 2, 2 Special functions that are inverses of known functions. Inverse functions (Day ) Go over: early exam, hw, quizzes, grading scheme, attendance
Parabolas and lines
 Parabolas and lines Study the diagram at the right. I have drawn the graph y = x. The vertical line x = 1 is drawn and a number of secants to the parabola are drawn, all centred at x=1. By this I mean
Parabolas and lines Study the diagram at the right. I have drawn the graph y = x. The vertical line x = 1 is drawn and a number of secants to the parabola are drawn, all centred at x=1. By this I mean
Newton s Method and Linear Approximations
 Newton s Method and Linear Approximations Newton s Method for finding roots Goal: Where is f (x) =0? f (x) =x 7 +3x 3 +7x 2 1 2-1 -0.5 0.5-2 Newton s Method for finding roots Goal: Where is f (x) =0? f
Newton s Method and Linear Approximations Newton s Method for finding roots Goal: Where is f (x) =0? f (x) =x 7 +3x 3 +7x 2 1 2-1 -0.5 0.5-2 Newton s Method for finding roots Goal: Where is f (x) =0? f
Problem set 2 The central limit theorem.
 Problem set 2 The central limit theorem. Math 22a September 6, 204 Due Sept. 23 The purpose of this problem set is to walk through the proof of the central limit theorem of probability theory. Roughly
Problem set 2 The central limit theorem. Math 22a September 6, 204 Due Sept. 23 The purpose of this problem set is to walk through the proof of the central limit theorem of probability theory. Roughly
15 Nonlinear Equations and Zero-Finders
 15 Nonlinear Equations and Zero-Finders This lecture describes several methods for the solution of nonlinear equations. In particular, we will discuss the computation of zeros of nonlinear functions f(x).
15 Nonlinear Equations and Zero-Finders This lecture describes several methods for the solution of nonlinear equations. In particular, we will discuss the computation of zeros of nonlinear functions f(x).
The absolute value (modulus) of a number
 of a number") The absolute value (modulus) of a number Given a real number x, its absolute value or modulus is dened as x if x is positive x = 0 if x = 0 x if x is negative For example, 6 = 6, 10 = ( 10) = 10. The absolute
The absolute value (modulus) of a number Given a real number x, its absolute value or modulus is dened as x if x is positive x = 0 if x = 0 x if x is negative For example, 6 = 6, 10 = ( 10) = 10. The absolute
MATH 205C: STATIONARY PHASE LEMMA
 MATH 205C: STATIONARY PHASE LEMMA For ω, consider an integral of the form I(ω) = e iωf(x) u(x) dx, where u Cc (R n ) complex valued, with support in a compact set K, and f C (R n ) real valued. Thus, I(ω)
MATH 205C: STATIONARY PHASE LEMMA For ω, consider an integral of the form I(ω) = e iωf(x) u(x) dx, where u Cc (R n ) complex valued, with support in a compact set K, and f C (R n ) real valued. Thus, I(ω)
MAT335H1F Lec0101 Burbulla
 Fall 2011 Q 2 (x) = x 2 2 Q 2 has two repelling fixed points, p = 1 and p + = 2. Moreover, if I = [ p +, p + ] = [ 2, 2], it is easy to check that p I and Q 2 : I I. So for any seed x 0 I, the orbit of
Fall 2011 Q 2 (x) = x 2 2 Q 2 has two repelling fixed points, p = 1 and p + = 2. Moreover, if I = [ p +, p + ] = [ 2, 2], it is easy to check that p I and Q 2 : I I. So for any seed x 0 I, the orbit of
8.1.1 Theorem (Chain Rule): Click here to View the Interactive animation : Applet 8.1. Module 3 : Differentiation and Mean Value Theorems
: Click here to View the Interactive animation : Applet 8.1. Module 3 : Differentiation and Mean Value Theorems") Module 3 : Differentiation and Mean Value Theorems Lecture 8 : Chain Rule [Section 8.1] Objectives In this section you will learn the following : Differentiability of composite of functions, the chain
Module 3 : Differentiation and Mean Value Theorems Lecture 8 : Chain Rule [Section 8.1] Objectives In this section you will learn the following : Differentiability of composite of functions, the chain
Section 3.1. Best Affine Approximations. Difference Equations to Differential Equations
 Difference Equations to Differential Equations Section 3.1 Best Affine Approximations We are now in a position to discuss the two central problems of calculus as mentioned in Section 1.1. In this chapter
Difference Equations to Differential Equations Section 3.1 Best Affine Approximations We are now in a position to discuss the two central problems of calculus as mentioned in Section 1.1. In this chapter
Newton s Method and Linear Approximations 10/19/2011
 Newton s Method and Linear Approximations 10/19/2011 Curves are tricky. Lines aren t. Newton s Method and Linear Approximations 10/19/2011 Newton s Method Goal: Where is f (x) =0? f (x) =x 7 +3x 3 +7x
Newton s Method and Linear Approximations 10/19/2011 Curves are tricky. Lines aren t. Newton s Method and Linear Approximations 10/19/2011 Newton s Method Goal: Where is f (x) =0? f (x) =x 7 +3x 3 +7x
COMP 558 lecture 18 Nov. 15, 2010
 Least squares We have seen several least squares problems thus far, and we will see more in the upcoming lectures. For this reason it is good to have a more general picture of these problems and how to
Least squares We have seen several least squares problems thus far, and we will see more in the upcoming lectures. For this reason it is good to have a more general picture of these problems and how to
4.5 Rational functions.
 4.5 Rational functions. We have studied graphs of polynomials and we understand the graphical significance of the zeros of the polynomial and their multiplicities. Now we are ready to etend these eplorations
4.5 Rational functions. We have studied graphs of polynomials and we understand the graphical significance of the zeros of the polynomial and their multiplicities. Now we are ready to etend these eplorations
MATH 614 Dynamical Systems and Chaos Lecture 3: Classification of fixed points.
 MATH 614 Dynamical Systems and Chaos Lecture 3: Classification of fixed points. Periodic points Definition. A point x X is called a fixed point of a map f : X X if f(x) = x. A point x X is called a periodic
MATH 614 Dynamical Systems and Chaos Lecture 3: Classification of fixed points. Periodic points Definition. A point x X is called a fixed point of a map f : X X if f(x) = x. A point x X is called a periodic
Algebra II Learning Targets
 Chapter 0 Preparing for Advanced Algebra LT 0.1 Representing Functions Identify the domain and range of functions LT 0.2 FOIL Use the FOIL method to multiply binomials LT 0.3 Factoring Polynomials Use
Chapter 0 Preparing for Advanced Algebra LT 0.1 Representing Functions Identify the domain and range of functions LT 0.2 FOIL Use the FOIL method to multiply binomials LT 0.3 Factoring Polynomials Use
Contents. 1 Introduction to Dynamics. 1.1 Examples of Dynamical Systems
 Dynamics, Chaos, and Fractals (part 1): Introduction to Dynamics (by Evan Dummit, 2015, v. 1.07) Contents 1 Introduction to Dynamics 1 1.1 Examples of Dynamical Systems......................................
Dynamics, Chaos, and Fractals (part 1): Introduction to Dynamics (by Evan Dummit, 2015, v. 1.07) Contents 1 Introduction to Dynamics 1 1.1 Examples of Dynamical Systems......................................
Quadratics and Other Polynomials
 Algebra 2, Quarter 2, Unit 2.1 Quadratics and Other Polynomials Overview Number of instructional days: 15 (1 day = 45 60 minutes) Content to be learned Know and apply the Fundamental Theorem of Algebra
Algebra 2, Quarter 2, Unit 2.1 Quadratics and Other Polynomials Overview Number of instructional days: 15 (1 day = 45 60 minutes) Content to be learned Know and apply the Fundamental Theorem of Algebra
Trigonometry Self-study: Reading: Red Bostock and Chandler p , p , p
 Trigonometry Self-study: Reading: Red Bostock Chler p137-151, p157-234, p244-254 Trigonometric functions be familiar with the six trigonometric functions, i.e. sine, cosine, tangent, cosecant, secant,
Trigonometry Self-study: Reading: Red Bostock Chler p137-151, p157-234, p244-254 Trigonometric functions be familiar with the six trigonometric functions, i.e. sine, cosine, tangent, cosecant, secant,
Math 2 Variable Manipulation Part 7 Absolute Value & Inequalities
 Math 2 Variable Manipulation Part 7 Absolute Value & Inequalities 1 MATH 1 REVIEW SOLVING AN ABSOLUTE VALUE EQUATION Absolute value is a measure of distance; how far a number is from zero. In practice,
Math 2 Variable Manipulation Part 7 Absolute Value & Inequalities 1 MATH 1 REVIEW SOLVING AN ABSOLUTE VALUE EQUATION Absolute value is a measure of distance; how far a number is from zero. In practice,
Law of Trichotomy and Boundary Equations
 Law of Trichotomy and Boundary Equations Law of Trichotomy: For any two real numbers a and b, exactly one of the following is true. i. a < b ii. a = b iii. a > b The Law of Trichotomy is a formal statement
Law of Trichotomy and Boundary Equations Law of Trichotomy: For any two real numbers a and b, exactly one of the following is true. i. a < b ii. a = b iii. a > b The Law of Trichotomy is a formal statement
Smooth Structure. lies on the boundary, then it is determined up to the identifications it 1 2
 132 3. Smooth Structure lies on the boundary, then it is determined up to the identifications 1 2 + it 1 2 + it on the vertical boundary and z 1/z on the circular part. Notice that since z z + 1 and z
132 3. Smooth Structure lies on the boundary, then it is determined up to the identifications 1 2 + it 1 2 + it on the vertical boundary and z 1/z on the circular part. Notice that since z z + 1 and z
, a 1. , a 2. ,..., a n
 CHAPTER Points to Remember :. Let x be a variable, n be a positive integer and a 0, a, a,..., a n be constants. Then n f ( x) a x a x... a x a, is called a polynomial in variable x. n n n 0 POLNOMIALS.
CHAPTER Points to Remember :. Let x be a variable, n be a positive integer and a 0, a, a,..., a n be constants. Then n f ( x) a x a x... a x a, is called a polynomial in variable x. n n n 0 POLNOMIALS.
16 Period doubling route to chaos
 16 Period doubling route to chaos We now study the routes or scenarios towards chaos. We ask: How does the transition from periodic to strange attractor occur? The question is analogous to the study of
16 Period doubling route to chaos We now study the routes or scenarios towards chaos. We ask: How does the transition from periodic to strange attractor occur? The question is analogous to the study of
2 Discrete growth models, logistic map (Murray, Chapter 2)
") 2 Discrete growth models, logistic map (Murray, Chapter 2) As argued in Lecture 1 the population of non-overlapping generations can be modelled as a discrete dynamical system. This is an example of an
2 Discrete growth models, logistic map (Murray, Chapter 2) As argued in Lecture 1 the population of non-overlapping generations can be modelled as a discrete dynamical system. This is an example of an
Mathematics-I Prof. S.K. Ray Department of Mathematics and Statistics Indian Institute of Technology, Kanpur. Lecture 1 Real Numbers
 Mathematics-I Prof. S.K. Ray Department of Mathematics and Statistics Indian Institute of Technology, Kanpur Lecture 1 Real Numbers In these lectures, we are going to study a branch of mathematics called
Mathematics-I Prof. S.K. Ray Department of Mathematics and Statistics Indian Institute of Technology, Kanpur Lecture 1 Real Numbers In these lectures, we are going to study a branch of mathematics called
The Inverse Function Theorem via Newton s Method. Michael Taylor
 The Inverse Function Theorem via Newton s Method Michael Taylor We aim to prove the following result, known as the inverse function theorem. Theorem 1. Let F be a C k map (k 1) from a neighborhood of p
The Inverse Function Theorem via Newton s Method Michael Taylor We aim to prove the following result, known as the inverse function theorem. Theorem 1. Let F be a C k map (k 1) from a neighborhood of p
An Overly Simplified and Brief Review of Differential Equation Solution Methods. 1. Some Common Exact Solution Methods for Differential Equations
 An Overly Simplified and Brief Review of Differential Equation Solution Methods We will be dealing with initial or boundary value problems. A typical initial value problem has the form y y 0 y(0) 1 A typical
An Overly Simplified and Brief Review of Differential Equation Solution Methods We will be dealing with initial or boundary value problems. A typical initial value problem has the form y y 0 y(0) 1 A typical
One dimensional Maps
 Chapter 4 One dimensional Maps The ordinary differential equation studied in chapters 1-3 provide a close link to actual physical systems it is easy to believe these equations provide at least an approximate
Chapter 4 One dimensional Maps The ordinary differential equation studied in chapters 1-3 provide a close link to actual physical systems it is easy to believe these equations provide at least an approximate
Analysis II: The Implicit and Inverse Function Theorems
 Analysis II: The Implicit and Inverse Function Theorems Jesse Ratzkin November 17, 2009 Let f : R n R m be C 1. When is the zero set Z = {x R n : f(x) = 0} the graph of another function? When is Z nicely
Analysis II: The Implicit and Inverse Function Theorems Jesse Ratzkin November 17, 2009 Let f : R n R m be C 1. When is the zero set Z = {x R n : f(x) = 0} the graph of another function? When is Z nicely
= 10 such triples. If it is 5, there is = 1 such triple. Therefore, there are a total of = 46 such triples.
 . Two externally tangent unit circles are constructed inside square ABCD, one tangent to AB and AD, the other to BC and CD. Compute the length of AB. Answer: + Solution: Observe that the diagonal of the
. Two externally tangent unit circles are constructed inside square ABCD, one tangent to AB and AD, the other to BC and CD. Compute the length of AB. Answer: + Solution: Observe that the diagonal of the
Extension 1 Content List
 Extension 1 Content List Revision doesn t just happen you have to plan it! 2014 v2 enzuber 2014 30 minute revision sessions Step 1: Get ready Sit somewhere quiet. Get your books, pens, papers and calculator.
Extension 1 Content List Revision doesn t just happen you have to plan it! 2014 v2 enzuber 2014 30 minute revision sessions Step 1: Get ready Sit somewhere quiet. Get your books, pens, papers and calculator.
If one wants to study iterations of functions or mappings,
 The Mandelbrot Set And Its Julia Sets If one wants to study iterations of functions or mappings, f n = f f, as n becomes arbitrarily large then Julia sets are an important tool. They show up as the boundaries
The Mandelbrot Set And Its Julia Sets If one wants to study iterations of functions or mappings, f n = f f, as n becomes arbitrarily large then Julia sets are an important tool. They show up as the boundaries
Electromagnetic Theory Prof. D. K. Ghosh Department of Physics Indian Institute of Technology, Bombay
 Electromagnetic Theory Prof. D. K. Ghosh Department of Physics Indian Institute of Technology, Bombay Lecture -1 Element of vector calculus: Scalar Field and its Gradient This is going to be about one
Electromagnetic Theory Prof. D. K. Ghosh Department of Physics Indian Institute of Technology, Bombay Lecture -1 Element of vector calculus: Scalar Field and its Gradient This is going to be about one
MATH 320, WEEK 2: Slope Fields, Uniqueness of Solutions, Initial Value Problems, Separable Equations
 MATH 320, WEEK 2: Slope Fields, Uniqueness of Solutions, Initial Value Problems, Separable Equations 1 Slope Fields We have seen what a differential equation is (relationship with a function and its derivatives),
MATH 320, WEEK 2: Slope Fields, Uniqueness of Solutions, Initial Value Problems, Separable Equations 1 Slope Fields We have seen what a differential equation is (relationship with a function and its derivatives),
Lesson 19 Factoring Polynomials
 Fast Five Lesson 19 Factoring Polynomials Factor the number 38,754 (NO CALCULATOR) Divide 72,765 by 38 (NO CALCULATOR) Math 2 Honors - Santowski How would you know if 145 was a factor of 14,436,705? What
Fast Five Lesson 19 Factoring Polynomials Factor the number 38,754 (NO CALCULATOR) Divide 72,765 by 38 (NO CALCULATOR) Math 2 Honors - Santowski How would you know if 145 was a factor of 14,436,705? What
Fixed Perimeter Rectangles
 Rectangles You have a flexible fence of length L = 13 meters. You want to use all of this fence to enclose a rectangular plot of land of at least 8 square meters in area. 1. Determine a function for the
Rectangles You have a flexible fence of length L = 13 meters. You want to use all of this fence to enclose a rectangular plot of land of at least 8 square meters in area. 1. Determine a function for the
Zoology of Fatou sets
 Math 207 - Spring 17 - François Monard 1 Lecture 20 - Introduction to complex dynamics - 3/3: Mandelbrot and friends Outline: Recall critical points and behavior of functions nearby. Motivate the proof
Math 207 - Spring 17 - François Monard 1 Lecture 20 - Introduction to complex dynamics - 3/3: Mandelbrot and friends Outline: Recall critical points and behavior of functions nearby. Motivate the proof
MA131 - Analysis 1. Workbook 4 Sequences III
 MA3 - Analysis Workbook 4 Sequences III Autumn 2004 Contents 2.3 Roots................................. 2.4 Powers................................. 3 2.5 * Application - Factorials *.....................
MA3 - Analysis Workbook 4 Sequences III Autumn 2004 Contents 2.3 Roots................................. 2.4 Powers................................. 3 2.5 * Application - Factorials *.....................
Taylor and Maclaurin Series. Copyright Cengage Learning. All rights reserved.
 11.10 Taylor and Maclaurin Series Copyright Cengage Learning. All rights reserved. We start by supposing that f is any function that can be represented by a power series f(x)= c 0 +c 1 (x a)+c 2 (x a)
11.10 Taylor and Maclaurin Series Copyright Cengage Learning. All rights reserved. We start by supposing that f is any function that can be represented by a power series f(x)= c 0 +c 1 (x a)+c 2 (x a)
Chapter Five Notes N P U2C5
 Chapter Five Notes N P UC5 Name Period Section 5.: Linear and Quadratic Functions with Modeling In every math class you have had since algebra you have worked with equations. Most of those equations have
Chapter Five Notes N P UC5 Name Period Section 5.: Linear and Quadratic Functions with Modeling In every math class you have had since algebra you have worked with equations. Most of those equations have
MS 3011 Exercises. December 11, 2013
 MS 3011 Exercises December 11, 2013 The exercises are divided into (A) easy (B) medium and (C) hard. If you are particularly interested I also have some projects at the end which will deepen your understanding
MS 3011 Exercises December 11, 2013 The exercises are divided into (A) easy (B) medium and (C) hard. If you are particularly interested I also have some projects at the end which will deepen your understanding
On convergent power series
 Peter Roquette 17. Juli 1996 On convergent power series We consider the following situation: K a field equipped with a non-archimedean absolute value which is assumed to be complete K[[T ]] the ring of
Peter Roquette 17. Juli 1996 On convergent power series We consider the following situation: K a field equipped with a non-archimedean absolute value which is assumed to be complete K[[T ]] the ring of
The Not-Formula Book for C1
 Not The Not-Formula Book for C1 Everything you need to know for Core 1 that won t be in the formula book Examination Board: AQA Brief This document is intended as an aid for revision. Although it includes
Not The Not-Formula Book for C1 Everything you need to know for Core 1 that won t be in the formula book Examination Board: AQA Brief This document is intended as an aid for revision. Although it includes
MATH 100 and MATH 180 Learning Objectives Session 2010W Term 1 (Sep Dec 2010)
") Course Prerequisites MATH 100 and MATH 180 Learning Objectives Session 2010W Term 1 (Sep Dec 2010) As a prerequisite to this course, students are required to have a reasonable mastery of precalculus mathematics
Course Prerequisites MATH 100 and MATH 180 Learning Objectives Session 2010W Term 1 (Sep Dec 2010) As a prerequisite to this course, students are required to have a reasonable mastery of precalculus mathematics
Introduction to Computer Graphics (Lecture No 07) Ellipse and Other Curves
 Ellipse and Other Curves") Introduction to Computer Graphics (Lecture No 07) Ellipse and Other Curves 7.1 Ellipse An ellipse is a curve that is the locus of all points in the plane the sum of whose distances r1 and r from two fixed
Introduction to Computer Graphics (Lecture No 07) Ellipse and Other Curves 7.1 Ellipse An ellipse is a curve that is the locus of all points in the plane the sum of whose distances r1 and r from two fixed
DR.RUPNATHJI( DR.RUPAK NATH )
") Contents 1 Sets 1 2 The Real Numbers 9 3 Sequences 29 4 Series 59 5 Functions 81 6 Power Series 105 7 The elementary functions 111 Chapter 1 Sets It is very convenient to introduce some notation and terminology
Contents 1 Sets 1 2 The Real Numbers 9 3 Sequences 29 4 Series 59 5 Functions 81 6 Power Series 105 7 The elementary functions 111 Chapter 1 Sets It is very convenient to introduce some notation and terminology
( ) 0. Section 3.3 Graphs of Polynomial Functions. Chapter 3
 0. Section 3.3 Graphs of Polynomial Functions. Chapter 3") 76 Chapter 3 Section 3.3 Graphs of Polynomial Functions In the previous section we explored the short run behavior of quadratics, a special case of polynomials. In this section we will explore the short
76 Chapter 3 Section 3.3 Graphs of Polynomial Functions In the previous section we explored the short run behavior of quadratics, a special case of polynomials. In this section we will explore the short
19. TAYLOR SERIES AND TECHNIQUES
 19. TAYLOR SERIES AND TECHNIQUES Taylor polynomials can be generated for a given function through a certain linear combination of its derivatives. The idea is that we can approximate a function by a polynomial,
19. TAYLOR SERIES AND TECHNIQUES Taylor polynomials can be generated for a given function through a certain linear combination of its derivatives. The idea is that we can approximate a function by a polynomial,
Infinite series, improper integrals, and Taylor series
 Chapter 2 Infinite series, improper integrals, and Taylor series 2. Introduction to series In studying calculus, we have explored a variety of functions. Among the most basic are polynomials, i.e. functions
Chapter 2 Infinite series, improper integrals, and Taylor series 2. Introduction to series In studying calculus, we have explored a variety of functions. Among the most basic are polynomials, i.e. functions
Math 12: Discrete Dynamical Systems Homework
 Math 12: Discrete Dynamical Systems Homework Department of Mathematics, Harvey Mudd College Several of these problems will require computational software to help build our insight about discrete dynamical
Math 12: Discrete Dynamical Systems Homework Department of Mathematics, Harvey Mudd College Several of these problems will require computational software to help build our insight about discrete dynamical
Unconstrained minimization of smooth functions
 Unconstrained minimization of smooth functions We want to solve min x R N f(x), where f is convex. In this section, we will assume that f is differentiable (so its gradient exists at every point), and
Unconstrained minimization of smooth functions We want to solve min x R N f(x), where f is convex. In this section, we will assume that f is differentiable (so its gradient exists at every point), and
Personal notes on renormalization
 Personal notes on renormalization Pau Rabassa Sans April 17, 2009 1 Dynamics of the logistic map This will be a fast (and selective) review of the dynamics of the logistic map. Let us consider the logistic
Personal notes on renormalization Pau Rabassa Sans April 17, 2009 1 Dynamics of the logistic map This will be a fast (and selective) review of the dynamics of the logistic map. Let us consider the logistic
8 Autonomous first order ODE
 8 Autonomous first order ODE There are different ways to approach differential equations. Prior to this lecture we mostly dealt with analytical methods, i.e., with methods that require a formula as a final
8 Autonomous first order ODE There are different ways to approach differential equations. Prior to this lecture we mostly dealt with analytical methods, i.e., with methods that require a formula as a final
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
Algebraic. techniques1
 techniques Algebraic An electrician, a bank worker, a plumber and so on all have tools of their trade. Without these tools, and a good working knowledge of how to use them, it would be impossible for them
techniques Algebraic An electrician, a bank worker, a plumber and so on all have tools of their trade. Without these tools, and a good working knowledge of how to use them, it would be impossible for them
Rational Functions. p x q x. f x = where p(x) and q(x) are polynomials, and q x 0. Here are some examples: x 1 x 3.
 and q(x) are polynomials, and q x 0. Here are some examples: x 1 x 3.") Rational Functions In mathematics, rational means in a ratio. A rational function is a ratio of two polynomials. Rational functions have the general form p x q x, where p(x) and q(x) are polynomials, and
Rational Functions In mathematics, rational means in a ratio. A rational function is a ratio of two polynomials. Rational functions have the general form p x q x, where p(x) and q(x) are polynomials, and
Computationally, diagonal matrices are the easiest to work with. With this idea in mind, we introduce similarity:
 Diagonalization We have seen that diagonal and triangular matrices are much easier to work with than are most matrices For example, determinants and eigenvalues are easy to compute, and multiplication
Diagonalization We have seen that diagonal and triangular matrices are much easier to work with than are most matrices For example, determinants and eigenvalues are easy to compute, and multiplication
Unit Ten Summary Introduction to Dynamical Systems and Chaos
 Unit Ten Summary Introduction to Dynamical Systems Dynamical Systems A dynamical system is a system that evolves in time according to a well-defined, unchanging rule. The study of dynamical systems is
Unit Ten Summary Introduction to Dynamical Systems Dynamical Systems A dynamical system is a system that evolves in time according to a well-defined, unchanging rule. The study of dynamical systems is
Lecture 5. Theorems of Alternatives and Self-Dual Embedding
 IE 8534 1 Lecture 5. Theorems of Alternatives and Self-Dual Embedding IE 8534 2 A system of linear equations may not have a solution. It is well known that either Ax = c has a solution, or A T y = 0, c
IE 8534 1 Lecture 5. Theorems of Alternatives and Self-Dual Embedding IE 8534 2 A system of linear equations may not have a solution. It is well known that either Ax = c has a solution, or A T y = 0, c
Modeling Data with Functions
 Chapter 11 Modeling Data with Functions 11.1 Data Modeling Concepts 1 11.1.1 Conceptual Explanations: Modeling Data with Functions In school, you generally start with a function and work from there to
Chapter 11 Modeling Data with Functions 11.1 Data Modeling Concepts 1 11.1.1 Conceptual Explanations: Modeling Data with Functions In school, you generally start with a function and work from there to
CHAPTER 10 Zeros of Functions
 CHAPTER 10 Zeros of Functions An important part of the maths syllabus in secondary school is equation solving. This is important for the simple reason that equations are important a wide range of problems
CHAPTER 10 Zeros of Functions An important part of the maths syllabus in secondary school is equation solving. This is important for the simple reason that equations are important a wide range of problems
Half of Final Exam Name: Practice Problems October 28, 2014
 Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Optimization and Newton s method
 Chapter 5 Optimization and Newton s method 5.1 Optimal Flying Speed According to R McNeil Alexander (1996, Optima for Animals, Princeton U Press), the power, P, required to propel a flying plane at constant
Chapter 5 Optimization and Newton s method 5.1 Optimal Flying Speed According to R McNeil Alexander (1996, Optima for Animals, Princeton U Press), the power, P, required to propel a flying plane at constant
Lecture 15: Exploding and Vanishing Gradients
 Lecture 15: Exploding and Vanishing Gradients Roger Grosse 1 Introduction Last lecture, we introduced RNNs and saw how to derive the gradients using backprop through time. In principle, this lets us train
Lecture 15: Exploding and Vanishing Gradients Roger Grosse 1 Introduction Last lecture, we introduced RNNs and saw how to derive the gradients using backprop through time. In principle, this lets us train
Lecture 3. Dynamical Systems in Continuous Time
 Lecture 3. Dynamical Systems in Continuous Time University of British Columbia, Vancouver Yue-Xian Li November 2, 2017 1 3.1 Exponential growth and decay A Population With Generation Overlap Consider a
Lecture 3. Dynamical Systems in Continuous Time University of British Columbia, Vancouver Yue-Xian Li November 2, 2017 1 3.1 Exponential growth and decay A Population With Generation Overlap Consider a
AIMS Exercise Set # 1
 AIMS Exercise Set #. Determine the form of the single precision floating point arithmetic used in the computers at AIMS. What is the largest number that can be accurately represented? What is the smallest
AIMS Exercise Set #. Determine the form of the single precision floating point arithmetic used in the computers at AIMS. What is the largest number that can be accurately represented? What is the smallest
In other words, we are interested in what is happening to the y values as we get really large x values and as we get really small x values.
 Polynomial functions: End behavior Solutions NAME: In this lab, we are looking at the end behavior of polynomial graphs, i.e. what is happening to the y values at the (left and right) ends of the graph.
Polynomial functions: End behavior Solutions NAME: In this lab, we are looking at the end behavior of polynomial graphs, i.e. what is happening to the y values at the (left and right) ends of the graph.
Zeros of Functions. Chapter 10
 Chapter 10 Zeros of Functions An important part of the mathematics syllabus in secondary school is equation solving. This is important for the simple reason that equations are important a wide range of
Chapter 10 Zeros of Functions An important part of the mathematics syllabus in secondary school is equation solving. This is important for the simple reason that equations are important a wide range of
1 Lyapunov theory of stability
 M.Kawski, APM 581 Diff Equns Intro to Lyapunov theory. November 15, 29 1 1 Lyapunov theory of stability Introduction. Lyapunov s second (or direct) method provides tools for studying (asymptotic) stability
M.Kawski, APM 581 Diff Equns Intro to Lyapunov theory. November 15, 29 1 1 Lyapunov theory of stability Introduction. Lyapunov s second (or direct) method provides tools for studying (asymptotic) stability
Aim: How do we prepare for AP Problems on limits, continuity and differentiability? f (x)
") Name AP Calculus Date Supplemental Review 1 Aim: How do we prepare for AP Problems on limits, continuity and differentiability? Do Now: Use the graph of f(x) to evaluate each of the following: 1. lim x
Name AP Calculus Date Supplemental Review 1 Aim: How do we prepare for AP Problems on limits, continuity and differentiability? Do Now: Use the graph of f(x) to evaluate each of the following: 1. lim x
August 16, Alice in Stretch & SqueezeLand: 15 Knife Map. Chapter Summary-01. Overview-01. Overview-02. Rossler-01. Rossler-02.
 Summary- Overview- Rossler- August 16, 22 Logistic Knife Abstract Summary- Overview- Rossler- Logistic What is the order of orbit creation in the Lorenz attractor? The attractor is created by a tearing
Summary- Overview- Rossler- August 16, 22 Logistic Knife Abstract Summary- Overview- Rossler- Logistic What is the order of orbit creation in the Lorenz attractor? The attractor is created by a tearing
Identify the graph of a function, and obtain information from or about the graph of a function.
 PS 1 Graphs: Graph equations using rectangular coordinates and graphing utilities, find intercepts, discuss symmetry, graph key equations, solve equations using a graphing utility, work with lines and
PS 1 Graphs: Graph equations using rectangular coordinates and graphing utilities, find intercepts, discuss symmetry, graph key equations, solve equations using a graphing utility, work with lines and
The degree of a function is the highest exponent in the expression
 L1 1.1 Power Functions Lesson MHF4U Jensen Things to Remember About Functions A relation is a function if for every x-value there is only 1 corresponding y-value. The graph of a relation represents a function
L1 1.1 Power Functions Lesson MHF4U Jensen Things to Remember About Functions A relation is a function if for every x-value there is only 1 corresponding y-value. The graph of a relation represents a function
Chaos and Liapunov exponents
 PHYS347 INTRODUCTION TO NONLINEAR PHYSICS - 2/22 Chaos and Liapunov exponents Definition of chaos In the lectures we followed Strogatz and defined chaos as aperiodic long-term behaviour in a deterministic
PHYS347 INTRODUCTION TO NONLINEAR PHYSICS - 2/22 Chaos and Liapunov exponents Definition of chaos In the lectures we followed Strogatz and defined chaos as aperiodic long-term behaviour in a deterministic