ME2142/ME2142E Feedback Control Systems First half: Professor POO Aun Neow Second half: Professor V Subramaniam
|
|
|
- Audra Crawford
- 6 years ago
- Views:
Transcription
1 ME4/ME4E Feedbck Cotrol Sytem Firt hlf: Profeor POO Au Neow Secod hlf: Profeor V Subrmim Referece Text Cotrol Sytem Egieerig 5 th Editio by Nom S Nie. Joh Wiley & So RefereceText: Moder Cotrol Egieerig by Ogt. Pretice Hll Webite for thi portio: ME4/TM34 Feedbck Cotrol Sytem
2 Itroductio d Bic Cocept ME4/TM34 Feedbck Cotrol Sytem
3 Wht i cotrol Sytem? A cotrol ytem i itercoectio of compoet tht will provide deired ytem repoe or output repoe. The tudy of cotrol ytem i the tudy of dymic ytem. A ttic ytem eed o cotrol. Exmple of cotrolled output: temperture, humidity, poitio, peed, preure, directio, liquid level, ltitude. Ad lo: ugr level i hum, ifltio, iteret rte. ME4/TM34 Feedbck Cotrol Sytem 3
4 Wht i cotrol Sytem? I order for ytem to be cotrollble, there mut be cue-effect reltiohip for it compoet, i.e. there mut be ome iput tht c cue chge to the output prmeter to be cotrolled. (Source of eergy) Cotrollig/ctutig iput, Proce or Plt Output (chemicl proce, mchie, idutril proce, ecoomic proce) ME4/TM34 Feedbck Cotrol Sytem 4
5 Ope-loop cotrol Sytem Deired output repoe Cotroller Plt or Proce Output I ope-loop cotrol ytem, o feedbck from the output i ued to cotrol the ytem. Bed o how the output i required, or deired, to repod, the cotroller djut the iput to the plt to chieve thi. Cotrol will oly be ccurte if plt i highly predictble d there i o iterl or exterl diturbce. Geerlly ued oly whe good cotrol performce i ot required. Exmple: A electric bred toter. Temperture cotrol of imple wter heter for the hower. ME4/TM34 Feedbck Cotrol Sytem 5
6 Cloed-loop feedbck cotrol Sytem R - E Cotroller U Plt Y Seor Feedbck R Set-poit or Referece Iput U Plt iput E Error Y Cotrolled Vrible The eor meure the ctul vlue of the output, Y, compre thi with the deired vlue, R, d compute the error, E. Bed o thi error E, the cotroller geerte the iput, U, to the plt o to brig Y to the deired vlue R. ME4/TM34 Feedbck Cotrol Sytem 6
7 Cloed-loop feedbck cotrol Sytem R - E Cotroller U Plt Y Seor Feedbck Geerlly ued whe good cotrol performce i required. Accurte cotrol c be chieved eve i the preece of plt vritio, d iterl or exterl diturbce becue uch diturbce will ffect the output Y, reflected i the error E, t thu will cue the plt iput U to chge o to correct for thee diturbce. C become utble. Stbility become importt coidertio. ME4/TM34 Feedbck Cotrol Sytem 7



8 Some exmple of cotrol Sytem? ME4/TM34 Feedbck Cotrol Sytem 8
9 Exmple: Ope-loop v Cloed Loop Proce of Wlkig: Deired output: poit where you wt to be. Cotroller: the bri Plt or proce: the leg Ope-loop cotrol: Wlkig with your eye cloed. A wlkig m Cloed-loop feedbck cotrol: Wlkig with your eye ope. The eye eed the ctul output, where you re d where you re hedig, compute the error i poitio d i directio, d iue commd to the plt, meig the leg, to move i uch wy o to reduce the error. ME4/TM34 Feedbck Cotrol Sytem 9
10 Exmple: Ope-loop v Cloed Loop Photo courtey U.S. Air Force Droppig Bomb: Objective of droppig bomb from height i to hit trget below. Deired output: Trget below Plt or proce: the bomb with it cotrol fi Ope-loop Cotrol or dumb bomb The cotroller, meig the pilot or bombrdier, eed to etimte hi ow height, velocity, ditce to trget, wid coditio, d chrcteritic of bomb to decide whe d where to relee the bomb. Ofte, hudred of bomb re eeded to hit pecific trget. ME4/TM34 Feedbck Cotrol Sytem 0
11 Exmple: Ope-loop v Cloed Loop Droppig Bomb: Objective of droppig bomb from height i to hit trget below. Deired output: Trget below Plt or proce: the bomb with it cotrol fi Cloed-loop Cotrol or mrt bomb Seor re icorported ito the bomb to give feedbck o it ctul poitio reltive to the trget. The error iformtio i the ued to teer the bomb, uig it cotrol fi, to the trget. Reult: oe trget oly eed oe bomb. Seor: TV, Ifrred, ler guided, or GPS. See lo: ME4/TM34 Feedbck Cotrol Sytem
12 Study of cotrol Sytem Study of cotrol ytem i the tudy of the dymic of the ytem. The repoe of the cotrolled vrible Y to y iput R deped upo the dymic of the Plt, Cotroller, d the Seor or Feedbck. R - E U Cotroller Seor Feedbck Plt Y Give cotrol ytem, y f(r,t) meig tht y i ot oly fuctio of r, but lo vrie with time t. If y f(r) the the ytem i ot dymic ytem but i ttic. To mthemticlly decribe the dymic behvior of the cotrol ytem d it compoet, differetil equtio re ued. ME4/TM34 Feedbck Cotrol Sytem
13 Lier d No-lier Sytem A ytem i lier if it tify the propertie of uperpoitio d homogeeity/clig. A ytem i o-lier if it i ot lier. Coider ytem which h the repoe to y two rbitrry iput u (t) d u (t) y (t) f(u (t)) d y (t) f(u (t)) Property of Superpoitio i tified if the output for combied iput of u (t) d u (t) i y 3 f(u (t) u (t)) y (t) y (t) Property of homogeeity i tified if y 3 f(u (t)) y (t) ME4/TM34 Feedbck Cotrol Sytem 3
14 Lier d No-lier Sytem Coider ytem which h the repoe to y two rbitrry iput u (t) d u (t) y (t) f(u (t))) d y (t) f(u (t)) A ytem i lier if the propertie of uperpoitio d homogeeity re tified. The bove ytem will be lier if the followig i tified y 3 f( u (t) u (t)) y (t) y (t) I geerl, rel phyicl ytem re o-lier if the opertig rge i very lrge, However, if opertio i coidered oly bout ome opertig poit, d the rge of opertio i ufficietly mll, mot ytem c be coidered to be lier. ME4/TM34 Feedbck Cotrol Sytem 4
15 Lier d No-lier Sytem Exmple: Which of the followig ytem re lier? (i) F x (ii) y x (iii) y mx b For y cott A d B d y two iput x d x, (i) F f(x ) x d F f(x ) x Alo, F 3 f(ax Bx ) (Ax Bx ) Ax Bx AF BF Thu propertie of uperpoitio d homogeeity i met. Thu lier. y f( x) x (ii) Ad f( Ax) ( Ax) Ay Alo, f( x x ) ( x x ) f( x ) f( x ) x x Thu ytem i ot lier or o-lier. y f( x) mx b ME4/TM34 Feedbck Cotrol Sytem (ot homogeou) (uperpoitio violted) (iii) Ad f ( Ax) max ( ) b Af( x) Amx ( b) (ot homogeou) Sytem i ot lier. C be how tht uperpoitio lo violted. 5
16 Lier Approximtio of Sytem Ay o-lier ytem c be lieried bout ome opertig poit d c be coidered to be lier withi mll opertig regio bout tht poit For y fuctio y f( x) with We c ue the Tylor Serie expio bout ome opertig poit, x 0, d hve df ( x x ) d f ( x x ) y f( x ) dx x x! dx! x x 0 0 For mll vritio bout the opertig poit, ecod d higher-order term i ( x x ) c be eglected. The y m x y y mx ( x ) 0 0 or 0 y f( x ) 0 0 which i lier. ME4/TM34 Feedbck Cotrol Sytem 6
17 Lier Approximtio of Sytem Exmple: θ For the pedulum how i the figure, the retorig torque due to grvity i give by T MgL iθ Derive the lieried equtio bout the opertig poit. Solutio: Sice with θ 0, 0 θ 0 d iθ T T MgL ( θ θ ) MgL co(0)( θ θ ) dθ θ 0 T T 0 0 MgLθ ME4/TM34 Feedbck Cotrol Sytem 7
18 Ed ME4/TM34 Feedbck Cotrol Sytem 8
19 ME4/ME4E Feedbck Cotrol Sytem Itllig OCTAVE i WINDOWS Ad Uig OCTAVE for Cotrol Sytem Alyi Jury 009 Deprtmet of Mechicl Egieerig, d Bchelor of Techology Progrmme Ntiol Uiverity of Sigpore

20 . Itroductio to GNU Octve GNU Octve ( i high-level lguge motly comptible with MATLAB ( It i primrily iteded for umericl computtio, for olvig commo umericl lier lgebr problem, mipultig polyomil, d itegrtig ordiry differetil d differetil-lgebric equtio. It lo h fcilitie for diplyig the reult of computtio i vriou form of grph which mke it relly ice. The relly ice thig bout GNU Octve i tht it i freely reditributble oftwre. You my reditribute it d/or modify it uder the term of the GNU Geerl Public Licee (GPL publihed by the Free Softwre Foudtio ( O-lie documettio o the uge of Octve c be foud t OCTAVE for Cotrol Sytem Study Similr to MATLAB, OCTAVE lo h exteive tool for vriou fuctio icludig cotrol ytem toolbox d it i thee tht we will primrily be itereted i i thi firt itroductory coure o cotrol ytem. 3. Dowlodig, Itllig d Uig OCTAVE Iformtio o dowlodig, itllig d uig OCTAVE c ll be foud from OCTAVE webite t A copy of the ltet pre-built itller for OCTAVE for both Widow d Mc OS X c be foud vi the mi OCTAVE ite or t For thoe uig Widow, do the followig to itll copy of Octve 3.0.3:. dowlod d ru the itller file octve etup.exe. Dowlodig could tke few to te of miute depedig upo your coectio peed.. Durig itlltio, click ext t the followig cree


21 3

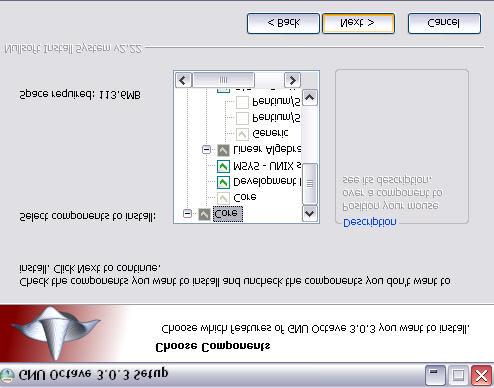
22 For the ext cree, chooe Guplot d click ext. Click ext o the ubequet cree d fiih t the lt cree to complete the itlltio. 3. Tet tht the itlltio i ruig properly by luchig OCTAVE START>All Progrm>GNU Octve>Octve to ope Octve widow. Note tht you c lo view Octve documettio. 4. I the Octve widow, t the commd lie, type (uderlied below) Octve exe:> ytf(,[,,4]); Octve exe:> tep(y); The figure below, which w copied to clipbord d pted here, hould the pper of tep repoe for uderdmped d-order ytem. 5. Cogrtultio, you hve uccefully itlled Octve Verio
23 6. There re few demotrtio progrm for cotrol i the Octve uite: DEMOCotrol: i demo/tutoril progrm for vriou cotrol toolbox fuctio. AlDemo: Stte-Spce Alyi demo. FRDemo: Frequecy Repoe demo. ModDemo: Model Mipultio demo. RLDemo: Root Locu demo. You c ru thee by typig the demo/tutoril me t the commd lie. 4 Some Note o Uig Octve 4. Cotrol Sytem Specifictio: The cotrol ytem uder tudy c be pecified i everl wy. () By uig vector to repreet the coefficiet of the umertor d deomitor polyomil of the cloed-loop trfer fuctio. For exmple, to pecify the ytem with the cloed-loop trfer fuctio?????????? The followig commd c be ued: Octve exe:3> um[ 3]; Octve exe:4> de[ 4]; Octve exe:5> ytf(um,de); or, ltertively, the followig: Octve exe:6> ytf([ 3],[ 4]); i which [ 3] pecifie the polyomil????? d [ 4] pecifie the polyomil?????????. To diply the dt tructure of the ytem, the yout commd c be ued : Octve exe:7> yout(y); Octve exe:8> yout(y); (b) By uig vector to pecify the zero d pole of the cloed-loop ytem: For exmple, to defie the ytem with the cloed-loop trfer fuctio????????????????? we c ue the commd: octve exe:9> um[-3]; octve exe:0> de[0 - -6]; octve exe:> k5; octve exe:> y3zp(um,de,k); or,ltertively, the followig: octve exe:3> y4zp([-3],[0 - -6],5); To diply the dt tructure of the ytem, the yout commd c be ued : octve exe:4> yout(y3); octve exe:5> yout(y4); 4. Triet Repoe: The uit impule repoe d the uit tep repoe of ytem c be eily obtied by uig the impule fuctio d the tep fuctio repectively. Thee fuctio produce plot of the triet repoe. For exmple: octve exe:6> impule(y); 5
24 octve exe:7> tep(y4); 4.3 Root Locu Plot: Root locu plot c eily be obtied uig the fuctio rlocu(y,[ic, mi_k, mx_k]), or where y i the ope-loop trfer for which the root locu plot i deired, ic i the icremet i the gi prmeter, d mi_k d mx_k re the miimum d mximum vlue of the gi prmeter for the plot. For exmple, if the root locu plot i deired of the ytem med y4 pecified i Sectio 4. bove, the followig commd c be ued: octve exe:8> rlocu(y4); octve exe:9> rlocu(y4,0.0,0,5); 6
25 ME4/ME4E Feedbck Cotrol Sytem Review of Lplce Trform ME4/TM34 Feedbck Cotrol Sytem
26 Mthemticl prelimirie Complex vrible σ jω j Im Rel prt Imgiry prt ω σ Re -ple ME4/TM34 Feedbck Cotrol Sytem
27 Complex fuctio Complex fuctio G ( ) G x jg y Im Rel prt Imgiry prt G θ t G x G y G G G ( ) G e y x jθ G G() y G θ G x Complex cojugte G()-ple G( ) G x jg y ME4/TM34 Feedbck Cotrol Sytem 3
28 Euler Theorem Euler Theorem θ e j coθ j i θ It Complex cojugte θ e j coθ j i θ Some ueful formul: coθ i θ j ( jθ jθ e e ) ( jθ jθ e e ) ME4/TM34 Feedbck Cotrol Sytem 4
29 Lplce Trform A mthemticl tool tht trform difficult differetil equtio ito imple lgebr problem where olutio c be eily obtied. Defiitio: Ivere Trform: L f { } f t) F( ) e t ( dt ( t) 0 for t < Normlly Tble of Lplce Trform pir re ued for tkig the Lplce Trfrom d the Ivere Trform. 0 L - { ( ) } f ( t) 0 c j F F( ) e t d πj c j ME4/TM34 Feedbck Cotrol Sytem 5
30 Lplce Trform Ed of L ME4/TM34 Feedbck Cotrol Sytem 6
31 Propertie of Lplce Trform Lierity: L { f ( t) b g( t) } L { f ( t) } b L { g(t) } F( ) b G( ) Exmple From Tble L The L - F( ) b G( ) { F ) } b L - L { } L - t d L { i( t) } t 5i(t) 4 { } { } 3 ( { G() } f ( t) b g( t) ME4/TM34 Feedbck Cotrol Sytem 7
32 3 6e {( t ) } 4 Propertie of Lplce Trform Trltio: If f ( t ) t g( t), the { } L g( t) e F( ) 0 t < L { e t f ( t) } F( ) Exmple From Tble L 3 6 { t } 4 3 6e The L ( t ) d L 3 6 { } { e } t t 4 4 ( ) Vrible trform: ME4/TM34 Feedbck Cotrol Sytem L{ f ( t) } F ( ) 8
33 Propertie of Lplce Trform Derivtive: L { f ( t) } ' L { f ( t) } f (0) F( ) f (0 ) { } '' ' ' L f ( t) L{ f ( t) } f (0) f (0) F( ) f (0) f (0) L... { f ( t) } f ( ) f (0) f (0) L ' ( ) f (0) L - L - L - { ' F ( ) } tf ( t) { '' } F ( ) t f ( t) ME4/TM34 Feedbck Cotrol Sytem... { } F ( ) ( ) t f ( t) 9
34 Propertie of Lplce Trform Fil-Vlue Theorem: lim t f ( t) lim 0 F( ) Iitil-Vlue Theorem: f ( 0) lim F ( ) ME4/TM34 Feedbck Cotrol Sytem 0
35 Fidig the Ivere. Uig L - c j F F( ) e t d πj c j { ( ) }. Uig the Tble of Trform Pir 3. Uig propertie 4. Uig Prtil Frctio Expio (We do ot ormlly ue Approch. We ue combitio of to 4.) ME4/TM34 Feedbck Cotrol Sytem
36 Uig Tble d Propertie Exmple Fid the ivere of 5 F ( ) ( 3) 8 6 Solutio: From Tble L - t Lookup from Tble L - 5L - ( 5 3) 8 6 L - L - ( 3) 3t 5te 4 i(4t) 4 Lookup from Tble or Ue Trltio property Lookup from Tble Thu L - 3t { F( ) } t 5te i(4t) ME4/TM34 Feedbck Cotrol Sytem
37 Uig Tble d Propertie Exmple Fid the ivere of F( ) 8 e 5 Solutio: We write F( ) 8 e 5 e 8t ( ) From Tble L - i( ) t t Thu L - e i(t) ( ) Uig trltio property Alo Property L - { e F( ) } f ( t ) for t d 0 otherwie Thu L - { F( ) } e 0 ( t 8) i ( t 8) for for t t 8 < 8 ME4/TM34 Feedbck Cotrol Sytem 3
38 ME4/TM34 Feedbck Cotrol Sytem 4 Uig Prtil Frctio Uig Prtil Frctio Frequetly N() d D() beig polyomil i Exmple or Eq(-) re the zero d pole of F() repectively. They c either be rel or complex. If they re complex, they lwy occur i cojugte pir. ) ( ) ( ) ( D N F m p p p z z z,,, d,,, m b b b b F m m m m > with ) ( 0 0 L L ) ( ) )( ( ) ( ) )( ( ) ( m p p p z z z F L L
39 ME4/TM34 Feedbck Cotrol Sytem 5 Uig Prtil Frctio Uig Prtil Frctio If Eq(-) h ditict pole, the F() c lwy be expded ito um of prtil frctio: Eq(-) where k re cott. To determie the vlue of k, multiply both ide of Eq(-) by (p k ) d let -p k. Eq(-3) p p p D N F L ) ( ) ( ) ( p k k k D N p ) ( ) ( ) (
40 Uig Prtil Frctio Exmple Fid the ivere of F( ) 3 ( )( ) Solutio: We let 3 F( ) ( )( ) the ( 3) ( ) ( )( ( 3) ( ) ( )( Thu F( ) d t t f ( t) e e for t 0 ME4/TM34 Feedbck Cotrol Sytem 6
41 Uig Prtil Frctio If Eq(-) h multiple pole, ech multiple pole p r of order q will be equivlet to prtil frctio of the form: b ( p r ) b ( p r ) L b ( q p r ) q where b k re cott. If Eq(-) h deomitor of the form ( b) ech of thee will be equivlet to prtil frctio of the form: N( ) c d F( ) L L( b) L b L where, b, c d d re cott. ME4/TM34 Feedbck Cotrol Sytem 7
42 Uig Prtil Frctio Give 3 F( ), fid f(t). ( ) Exmple 3 Solutio: Let F( ) 3 3 ( ) b ( ) b ( ) b3 ( ) 3 Multiplyig both ide by () 3 Lettig 3 b ( ) b ( ) b3 we hve b 3 b Comprig term i, we hve Comprig cott term, we hve 3 b b b b 0 3 givig Thu F ( ) ( ) 3 d f ( t) e t t e t ME4/TM34 Feedbck Cotrol Sytem 8

43 Solvig differetil equtio ME4/TM34 Feedbck Cotrol Sytem 9
44 Solvig differetil equtio Exmple Solve for y(t) give && y y& 5y 3, y(0) 0, y& (0) 0 Solutio: Trformig or givig [ Y ( ) y(0) y& (0)] [ Y ( ) y(0) ] Y( ) Y( ) 5Y ( ) ( Y ( ) ( 3 5) Multiplyig both ide by d lettig 0, we get 5) Y ( ) b c 5 5Y ( ) ME4/TM34 Feedbck Cotrol Sytem 0
45 Solvig differetil equtio Exmple We hve Y( ) ( 3 5) b c 5 Multiplyig both ide by d lettig 0, we get 3 5 Multiplyig both ide by the deomitor ( 5) we hve 3 ( 5) ( b c) Comprig term i, 0 6/ 5 c c 6/ 5 Comprig term i, Thu 3 3 Y ( ) /5 b b 3/ ( ) 3 0 ( ) Ad 3 3 t 3 t y( t) e cot e i t for t ME4/TM34 Feedbck Cotrol Sytem
46 Lplce Trform END ME4/TM34 Feedbck Cotrol Sytem
47 Tble of Lplce Trform Pir ME4/ME4E Jury 008 Deprtmet of Mechicl Egieerig & Bchelor of Techology Progrmme Ntiol Uiverity of Sigpore
48 Lplce Trform Pir f (t) F () Uit impule δ (t) 4 Uit tep u (t) 3 t t ( )!, 5 t, (,, 3, ) 6 t e 7 t 8 t ( )! 9 t t e, e t (,, 3, )! te ( ), (,, 3, ) (,, 3, ) ( )! ( ) ω 0 i ωt ω co ωt ω ω ih ωt ω 3 coh ωt ω t 4 ( e ) t bt 5 ( e e ) b bt t 6 ( be e ) 7 b ( be b b t bt e ) ( ) ( )( b) ( )( b) ( )( b)
49 t t 8 ( e te ) t 9 ( t e ) ( ) ( ) 0 e t i ωt e t co ωt ω ζω t e i ω ζ t ζ, ζ < ζωt 3 e i ( ω ζ t φ) ζ φ t ζ ζ, ζ < ζω t e i ( ω ζ t φ) 4 ζ φ t ζ ζ 5 coωt 6 ωt i ωt, ζ < ω ( ) ω ( ) ω ( ω ζω ω ζω ω ω ζω ω ω ( ω ) 3 ω ( ω ) ) 7 i ωt 3 ω ωt coωt ( ω ) 8 t ωt ω i ( ω ) 9 t co ωt ω ( ω ) 30 ( coω coω ) ω ω t t 3 ( i ωt ωt coωt) ω, ( ω ) ( ω )( ω ) ω ( ω )
50 ME4/ME4E Feedbck Cotrol Sytem Modellig of Phyicl Sytem The Trfer Fuctio ME4/TM34 Feedbck Cotrol Sytem
51 Differetil Equtio U Plt Y I the plt how, the iput u ffect the repoe of the output y. I geerl, the dymic of thi repoe c be decribed by differetil equtio of the form d y dt m m d y dy d u d u du L 0 y bm bm L b b dt dt dt dt dt 0 u Differetil equtio i lier if coefficiet re cott or fuctio oly of time t. Lier time-ivrit ytem: if coefficiet re cott. Lier time-vryig ytem: if coefficiet re fuctio of time. ME4/TM34 Feedbck Cotrol Sytem
52 Modellig of Phyicl Dymic Sytem Mechicl Sytem Fudmetl Lw Mechicl Sytem Trltiol Sytem Newto Lw x f m f m mx & f i pplied force, m i m i g x i diplcemet i m. ME4/TM34 Feedbck Cotrol Sytem 3
53 Modellig of Phyicl Dymic Sytem Mechicl Sytem Toriol Sytem T J θ ω T J θ & Jω& T i pplied torque, -m J i momet of ierti i g-m θ ω i diplcemet i rdi i the gulr peed i rd/ ME4/TM34 Feedbck Cotrol Sytem 4
54 Modellig of Phyicl Dymic Sytem Mechicl Sytem - prig Trltiol: x x f i teile force i prig, i prig cott, /m f f Importt: Note directio d ig f ( x x ) Rottiol: T re exterl torque pplied o the toriol prig, -m G i toriol prig cott, -m/rd θ θ T G( θ ) θ ME4/TM34 Feedbck Cotrol Sytem 5
55 Modellig of Phyicl Dymic Sytem Mechicl Sytem dmper or dhpot Trltiol:. x. x f f f i teile force i dhpot, b b i coefficiet of dmpig, -/m f b( x& ) x& Rottiol: θ & T i torque i toriol dmper, -m b i coefficiet of toriol dmpig, -m-/rd T b ( θ & & ) θ θ & ME4/TM34 Feedbck Cotrol Sytem 6
56 Modellig of Phyicl Dymic Sytem Exmple Derive the differetil equtio reltig the output diplcemet y to the iput diplcemet x. b A y x Free-body digrm t poit A, f d A f Note: Directio of f d f d how ume they re teile. Sice m 0, f m give f f d 0 Sice Thu Or f d & by d ( x y) f ( x y) by& 0 b y& y x ME4/TM34 Feedbck Cotrol Sytem 7
57 The Trfer Fuctio The trfer fuctio of lier time ivrit ytem i defied the rtio of the Lplce trform of the output (repoe) to the Lplce trform of the iput (ctutig igl), uder the umptio tht ll iitil coditio re zero. Previou Exmple b y& y x Aumig zero coditio d tkig Lplce trform of both ide we hve by ( ) Y ( ) X ( ) Trfer Fuctio G( ) Y ( ) X ( ) b Thi i firt-order ytem. ME4/TM34 Feedbck Cotrol Sytem 8
58 Modellig of Phyicl Dymic Sytem Exmple For the prig-m-dmper ytem how o the right, derive the trfer fuctio betwee the output x o d the iput x i. m x o Free-Body digrm m x o Note: f d f d umed to be teile. b f f d f m give f f d mx& o x i Thu ( x i x ) b( x& x& ) o i o m& x o Or m && x bx& x bx& o o o i x i Ad m X o ( ) bx o( ) X o ( ) bx i ( ) X i ( ) Trfer Fuctio G( ) X X i ( ) o ( ) m b b. Thi i ecod-order ytem. ME4/TM34 Feedbck Cotrol Sytem 9
59 Modellig of Phyicl Dymic Sytem Electricl Elemet Cpcitce e i C Or Complex impedce q C e q Ce dq i dt E I C C I C(E) IX c de dt X c /( C) Reitce e i R Uit of R: ohm ( ) Iductce e i L Uit of L: Hery (H) i e e ir e i R Ω L L di dt t 0 e dt Or E IX L I(L) ME4/TM34 Feedbck Cotrol Sytem 0
60 Modellig of Phyicl Dymic Sytem Electricl Circuit- irchhoff Lw Curret Lw: The um of curret eterig ode i equl to tht levig it. i 0 Voltge Lw: The um lgebric um of voltge drop roud cloed loop i zero. e 0 ME4/TM34 Feedbck Cotrol Sytem
61 Modellig of Phyicl Dymic Sytem Electricl Circuit- Exmple RC circuit: Derive the trfer fuctio for the circuit how, E IR i IX c R d E o IX c e i i C e o givig E E o i X c R X c RC /( C) R /( C) Thi i firt-order trfer fuctio. ME4/TM34 Feedbck Cotrol Sytem
62 Modellig of Phyicl Dymic Sytem Electricl Circuit- Exmple RLC circuit: R L d E IR IX IX i E o IX c L c e i i C e o givig E E o i X R X LC L c X c RC /( C) R L /( C) Thi i ecod-order trfer fuctio. ME4/TM34 Feedbck Cotrol Sytem 3
63 Modellig of Phyicl Dymic Sytem Opertiol Amplifier Propertie of idel Op Amp v o A( v v) Gi A i ormlly very lrge o tht compred with other vlue, ( v ) i umed mll, equl to zero. v The iput impedce of the Op Amp i uully very high (umed ifiity) o tht the curret i d i re very mll, umed zero. Two bic equtio goverig the opertio of the Op Amp ( v v v v) 0 or d i, i 0 0 ME4/TM34 Feedbck Cotrol Sytem 4
64 Modellig of Phyicl Dymic Sytem Opertiol Amplifier Exmple Z f i f i i v i i 0 Z i S - v o For the Op Amp, ume i 0 d v v 0. The i o i i 0 or 0 i f v Z i v Z f Therefore v o Z Z f i v i V o i ( ) V ( ) Z Z f i ME4/TM34 Feedbck Cotrol Sytem 5
65 Modellig of Phyicl Dymic Sytem Opertiol Amplifier Exmple Z f i f i i v i i 0 Z i S - v o For the followig v o Z Z f i v i v v Z Z f R R R f C o f f i R i i R C i p i ME4/TM34 Feedbck Cotrol Sytem 6
66 Permet Mget DC Motor Drivig Lod R L e i ω e T ω J b For the dc motor, the bck emf i proportiol to peed d i give by where e i the voltge cott. The torque produced i proportiol to e ω rmture curret d i give by where i the torque cott. Relevt equtio: T T i t di e R i L dt t dω ti T J b ω dt e ω Note: By coiderig power i power out, c how tht e t ME4/TM34 Feedbck Cotrol Sytem 7
67 Ed ME4/TM34 Feedbck Cotrol Sytem 8
68 ME4/ME4E Feedbck Cotrol Sytem Sytem Triet/Time Repoe ME4/TM34 Feedbck Cotrol Sytem
69 Sytem repoe The ytem repoe comprie two prt, triet d tedy-tte. Triet Repoe Stedy-Stte Repoe Stedy-Stte Error The mgitude of the triet repoe decree with time d ultimtely vihe levig oly the tedy-tte repoe. It i lwy ocited with the compoet e t with > 0 ME4/TM34 Feedbck Cotrol Sytem
70 Sytem Chrcteritic Equtio Coider the ytem with the cloed-loop trfer fuctio, G c () how Iput R() G c () C() Output Sytem with C ( ) N G c ( ) R( ) D ( ) ( ) where N c () d D c () re polyomil of. c c The ytem chrcteritic equtio i give by D c ( ) Note tht the chrcteritic equtio i property of the ytem d i ot depedet o the iput. 0 ME4/TM34 Feedbck Cotrol Sytem 3
71 Sytem Chrcteritic Equtio Exmple Sprig-m-dmper (Slide 9: Modellig of Phyicl Sytem) Trfer Fuctio Chrcteritic Eq: G( ) X ( ) o X i ( ) m m b b b R-C circuit (Slide : Modellig of Phyicl Sytem) E o Trfer Fuctio E RC i 0 Chrcteritic Eq: RC 0 Cloed-loop feedbck ytem (Slide 8: Block Digrm Algebr) C G Trfer Fuctio R GH Chrcteritic Eq: GH 0 ME4/TM34 Feedbck Cotrol Sytem 4
72 Sytem Chrcteritic Equtio C( ) R( ) Gc ( ) N D c c ( ) ( ) Chrcteritic equtio D c ( ) 0 The root of thi equtio re the cloed-loop pole d they determie the triet repoe of the ytem. Ech root, p, of thi equtio will cotribute term time repoe of the ytem. Or c ( t) pt L Ae L Note tht if ll the root, p r, re egtive, the the triet repoe will evetully die wy t icree. But if y of the root i poitive, the the triet repoe will grow without boud time icree. The ytem i the id to be utble. e pt i the ME4/TM34 Feedbck Cotrol Sytem 5
73 Sytem Repoe Give dymic ytem: How do we pecify the chrcteritic of the repoe required? How do we compre it with other ytem? How do we kow whether it repoe will dequtely meet our eed? How will we kow how it will repod to differet iput? We ue Stdrd tet iput to excite ytem d oberve repoe Clify ytem with imilr chrcteritic d idetify their performce chrcteritic with ytem prmeter. ME4/TM34 Feedbck Cotrol Sytem 6
74 Sytem Repoe Tet igl ) Step iput r( t) A 0 A R ( ) < 0 Whe A, we hve uit tep iput. Ued to tudy repoe to udde chge i iput. t t 0 r(t) A t 0 t ) Rmp iput r( t) At 0 A R ( ) Whe A, we hve uit rmp iput. Ued to tudy repoe to grdul chge i iput. t t < 0 0 r(t) t 0 At t ME4/TM34 Feedbck Cotrol Sytem 7
75 Sytem Repoe Tet igl 3) Impule iput r ( t) Aδ (0) i the uit-impule fuctio or Dirc delt fuctio R ( ) A Whe A, we hve uit impule iput. r(t) A t 0 Ued to tudy repoe to udde hock or impct. t 4) Siuoidl iput r( t) Ai ωt Ued for frequecy repoe lyi. 0 Importt method. Will be dicu i the ecod hlf of coure. t t < 0 0 r(t) t 0 t Uig tet igl () to (3) re ofte kow time repoe or triet repoe lyi while uig tet igl (4) i kow frequecy repoe. ME4/TM34 Feedbck Cotrol Sytem 8
76 Sytem Repoe Firt-order ytem A firt-order ytem c be writte i the tdrd form C( ) R( ) T T i kow the time cott d determie the peed of repoe. Exmple Sprig-dmper ytem (Slide 7 of Modellig of Phyicl Sytem) Y ( ) with T b X ( ) b. T RC circuit (Slide of Modellig of Phyicl Sytem). E E o i with RC T If the trfer fuctio re the me, the the repoe y(t) d e o (t) will be the me for the me iput i x(t) d e i (t).. T RC ME4/TM34 Feedbck Cotrol Sytem 9
77 Sytem Repoe Firt-order ytem Repoe to uit tep iput. C( ) R( ) T with Thu C( ) R( ) T R( ) / T ( / T ) A B / T Multiplyig both ide by d lettig 0 give A Multiplyig both ide by (/T) d lettig -/T give B - Therefore C( ) / T Uig tble c( t) t / T t / T e ( e ) for t 0 ME4/TM34 Feedbck Cotrol Sytem 0
78 Sytem Repoe Firt-order ytem Repoe to uit tep iput For c( t) ( e t / T ) Note: The mller the time cott T, the fter the repoe. The hpe i lwy the me. ME4/TM34 Feedbck Cotrol Sytem
79 Sytem Repoe Firt-order ytem Repoe to uit rmp iput. C( ) R( ) T with Thu C( ) R( ) T ( R ( ) / T / T) T T ( / T ) Uig tble c( t) For, c( t) ( t T t T ( e with the error e(t) r(t) c(t) T ( e Te t / T t / T ) t / T ) ) for t 0 r(t) t 0 c(t) r(t) e T t ME4/TM34 Feedbck Cotrol Sytem
80 Sytem Repoe Firt-order ytem Repoe to uit impule iput C( ) R( ) T with R( ). Thu C( ) T / T / T Or c( t) T e t / T For, r(t) c( t) T e t / T t 0 t ME4/TM34 Feedbck Cotrol Sytem 3
81 Sytem Repoe Lier time-ivrit ytem Propertie Repoe to Uit Impule c ( t) T e t / T C( ) R( ) T c ( t) Uit Step ( e Chrcteritic Equtio T 0 T t / T ) c 3 ( t) Uit Rmp ( t T Te t / T ) t T The triet repoe ll coti the term e / which i determied by the root of the chrcteritic equtio d the prmeter T. Note tht the uit tep i the derivtive of the uit rmp, d the uit impule i the derivtive of the uit tep. Note tht imilrly, c (t) i the derivtive of c 3 (t) d c (t) i the derivtive of c (t). For lier time-ivrit ytem, the repoe to the derivtive of iput c be obtied by tkig the derivtive of the repoe to the iput. ME4/TM34 Feedbck Cotrol Sytem 4
82 Permet Mget DC Motor Goverig equtio di e R ω i L e dt E e Ω ( R L) I T ti T t I dω T J bω T ( J b) Ω dt e R i L eω The Permet Mget DC motor. T ω J b Block Digrm E - L R I t T Ω J b e Ω e E - ( L R )( J b) t Ω e Ω e ME4/TM34 Feedbck Cotrol Sytem 5
83 Permet Mget DC Motor E - e Ω ( L R )( J b ) e The Permet Mget DC motor. Ω ME4/TM34 Feedbck Cotrol Sytem Block digrm the become E - t t / R J b e Ω with Commoly L << R J b L c the be eglected Ω G E GH / R ( J b) t e / R ( J b) τ t b t t / R e / R J b τ t / R b t t J e e 6 / R / R
84 Speed Cotrol of the DC Motor E τ Ω τ b t J e / R The repoe to uit tep iput i firt order with time cott of τ Ω t 0 t With peed feedbck V - Error c Cotroller τ ME4/TM34 Feedbck Cotrol Sytem E Ω c Ω τ c ' V c τ c τ ' τ τ c with τ ' ' c c The reultt ytem i till firt-order but the time cott i ow much mller, thu much fter repoe. 7
85 Sytem Repoe Secod-order ytem A ecod-order ytem will be of the form Y( ) X ( ) d e b c with, b, c, d d e beig cott. Exmple RLC circuit (ee Modellig of Phyicl Sytem) E o ( ). E ( ) LC RC Sprig-m-dmper i X X o i ( ) ( ) m b b Stdrd Form:. C( ) R( ) ω ME4/TM34 Feedbck Cotrol Sytem ζ ω ( ) ω ζω ω 8
86 Cloed-Loop Poitio Feedbck Sytem (Servomechim) R - E G c cotroller V τ Ω θ With G c beig proportiol gi p θ R - E p ( τ ) I tdrd formt Θ R Θ R G GH τ ω ζω ω p p with ω ω ζ p τ ζ turl frequecy dmpig rtio p ζω τ τ ME4/TM34 Feedbck Cotrol Sytem 9
87 Sytem Repoe Secod-order ytem Exmple: Determie the vlue of gi for the cloed-loop ytem to hve udmped turl frequecy of 4. Wht will the be the dmpig fctor? 5 8 5() 8 Chrcteritic equtio: GH ςω ω ω ( 5) ςω 4 ς ME4/TM34 Feedbck Cotrol Sytem 0
88 Time Repoe Secod-order ytem Θ ω Coider R ζω ω The root of the chrcteritic equtio re p, ζω ± ω ζ For 0 < ζ <, the root re pir of complex cojugte p, ζω ± jω d where ω d ω ζ i clled the dmped turl frequecy d the repoe i uderdmped. For ζ, the root re equl p d the ytem i id to be, ω criticlly dmped. For ζ >, the root re both rel d uequl p, ζω ± ω ζ d the ytem i id to be overdmped. ME4/TM34 Feedbck Cotrol Sytem
89 Step Repoe Secod-order ytem Θ R ω ζω ω with R( ) Therefore Θ ( ω ζω ω ) Uderdmped Repoe 0 < ζ < From tble (Etry 4 i Tble), we hve c( t) e ζωt ζ t 0 i( ω d t φ) 0 < φ < π ω d φ t ω ζ ζ ζ Thi repreet decyig ocilltory repoe depedig upo frequecy of ocilltio of ω d ζ with ME4/TM34 Feedbck Cotrol Sytem
90 Step Repoe Secod-order ytem Criticlly dmped Repoe ζ We hve Θ ( ω ζω ω ) ω ( ω ) From tble (Etry 8 i Dr Che tble with givig ( ) c c( t) ( e t ω te t ωt ωt ( t) e ω te for t 0 ), we hve Thi repreet o-ocilltory repoe with expoetilly decyig triet compoet d zero tedy-tte error. The peed of decy of the triet compoet deped upo the prmeter. ) ω ME4/TM34 Feedbck Cotrol Sytem 3
91 Step Repoe Secod-order ytem Overdmped Repoe ζ > Θ ( ( ω ζω ω ω ) )( b) with ( ζω ω ζ ω )( ζω ω ζ ) ζω ω ζ d b ζω ω ζ We ue Etry 7 i Dr Che tble. o tht for t c( t) ω b ( be b e t bt ) 0, C d C beig cott. We hve t Ce C The repoe i o-ocilltory, trt iitilly with expoetilly rie to c( ). b ω e c( 0) bt 0 d >> b If ζ >>, the d the firt expoetil term will decy much fter th the ecod. The pole ( ) c the be eglected d the ytem behve like firt-order ytem. ME4/TM34 Feedbck Cotrol Sytem 4

92 Step Repoe Secod-order ytem Normlized repoe curve For ft repoe, ζ 0.7 i uully deirble. If o overhoot i required, ζ > i uully ued. ME4/TM34 Feedbck Cotrol Sytem 5
93 Triet Repoe Specifictio Five meure of triet performce bed o d -order uderdmped repoe Mximum (percet) overhoot: c( t p ) c( ) M p 00% c( ) Dely time Rie time: 0% - 90%, or 5% - 95%, or 0% - 00% Pek time ME4/TM34 Feedbck Cotrol Sytem Settlig time: time to rech d ty withi pecified limit, uully % or 5%. 6
94 Meure of triet performce We hve c( t) e ζωt ζ i( ω d t φ) ω d ω ζ φ t ζ ζ Rie Time tr c( ) givig i( ω φ) 0 t r d t r or ω d t r φ 0 Thu ω t d r φ t ζ ζ t ζ ζ givig t r π β ω d ME4/TM34 Feedbck Cotrol Sytem 7
95 Meure of triet performce We hve c( t) e ζωt ζ i( ω d t φ) ω d ω ζ φ t ζ ζ Pek Time t p dc( t) dt t t p (iω d t p ) ω ζ e ζω t p 0 givig i 0 ω or ω dt p 0, π, π, 3π, t d p Therefore t p π ω d for the firt pek. ME4/TM34 Feedbck Cotrol Sytem 8
96 ME4/TM34 Feedbck Cotrol Sytem 9 We hve We hve ) i( ) ( φ ω ζ ζω t e t c d t ζ ζ φ t Mximum Overhoot Mximum Overhoot ζ ω ω d M p ) ( p p t c M ] ) / ( i[ ) / ( φ ω π ω ζ ω π ζω d d d e ) i( ) / ( φ π ζ π ζ ζ e A ) i( ζ φ π Therefore π ζ ζ ) / ( e M p Meure of triet performce Meure of triet performce
97 Meure of triet performce We hve c( t) e ζωt ζ i( ω d t φ) ω d ω ζ φ t ζ ζ Settlig Time t ζω The curve ± ( e t / ζ ) give the evelope curve of the triet repoe. t i foud to be pproximtely t 4T t 3T (% criterio) (5% criterio) where time cott ME4/TM34 Feedbck Cotrol Sytem T ζω 30
98 Ed ME4/TM34 Feedbck Cotrol Sytem 3
99 A Note o eglectig L O Slide 6 i the preettio o Sytem Repoe, it w metioed tht the iductce L c be eglected. Below re ome ote o thi. Coider the trfer fuctio ω V ( L ' R )( J We c re-write thi ω V ( τ )( τ ) b) where ', L / R R b τ d τ J / b. Coider the repoe to uit tep iput, V() /. The Ω( ) ( τ )( τ ) From the Lplce Trform Tble (Che Tble etry 7), we write the ivere trform /( τ τ ) Ω ( ) ( / τ )( / τ ) /( τ τ ) ϖ t ) ( (/ τ )(/ τ ) / τ / τ τ e τ t / τ t / τ ( e τ t / τ t / τ ( τ e τ e τ For implicity, coider the ce whe. Coider lo tht τ d with τ << τ with τ τ / 0. / t /0 The ω ( t) ( e 0e t ) () 9 If, becue τ << τ, we eglect τ, the we hve ) )
100 From Etry 4 i Dr Che Tble, we hve /0 Ω( ) ( τ ) (0 ) ( /0) /0 /0 t /0 t /0 ω ( t) ( e ) e () The two repoe repreeted by Equtio () d () re plotted i the figure below () () Time, ec The two curve how bove, plotted uig Equtio () d () re pproximtely imilr, meig tht we c eglect τ d the repoe will till be reobly ccurte with the impler trfer fuctio.
101 A Note o Derivtio of Pek Time, T p (Slide 7 i Sytem Repoe) The output repoe i c( t) e ζωt ζ i( ω t φ) d () with ω d ω ζ d Differetitig Eq () by prt, we hve d c( t) ( ζωe dt ζ ζωt ) i( ω t φ) d ζ φ t. ζ e ζωt ζ ( co( ω t φ) ω ) d d e ζωt ζ e ζωt ζ [ ζω i( ω t φ) ω co( ω t φ) ] d d d [ ζω ( i( ω t)coφ co( ω t)iφ) ω ( co( ω t)coφ i( ω t)iφ) ] d d d d d Notig tht co φ ζ d iφ ζ, we hve c& ( t) e e ζωt ζ ζωt ζ [( ζω coφ ω iφ)i( ω t) ( ζω iφ ω coφ)co( ω t) ] d d [( ζ ω ω ( ζ )) i( ωdt) ( ζω ζ ζ ωζ )co( ωdt) ] d d e ζωt ζ [ ω i( ω t) ] d Lettig c& ( t) 0 t t t p, we thu hve e ζω t p ζ [ ω i( ω t )] 0 d p. p Sice e ζω 0 for t <, t p we hve i( ω dt p ) 0 givig i( ω dt p ) 0, π,π,3π, Chooig the firt pek give t p π ω d
102 ME4/ME4E Feedbck Cotrol Sytem Stedy-Stte Chrcteritic ME4/TM34 Feedbck Cotrol Sytem
103 Sytem Type Coider the uity-feedbck ytem R E - G C ( T )( Tb ) L( Tm ) With G( ) (-) N ( T )( T ) L( T ) p The prmeter N ocited with the term S N i the deomitor repreet the Type of the ytem. Exmple: Type 0 if N0, Type if N d o o. A free term i the deomitor repreet itegrtio. The higher the type umber, the better the tedy-tte ccurcy of the cloed-loop cotrol ytem. However, the higher the ytem type, the greter the problem with ytem tbility. ME4/TM34 Feedbck Cotrol Sytem
104 Stedy-Stte Error Sttic Error Cott The me uity-feedbck ytem R E - G C Error Trfer fuctio E R R C C R R G ( G) G G G Thu E( ) R( ) G( ) E R G d the tedy-tte error i e lim e( t) e t lim E( ) 0 R( ) lim 0 G( ) ME4/TM34 Feedbck Cotrol Sytem 3
105 Stedy-Stte Error Sttic Error Cott e R( ) lim 0 G( ) For uit-tep iput R( ) d e lim G( ) 0 G(0) Sttic Poitio Error Cott, p i defied lim G( ) G(0) d 0 p e p ( T )( Tb ) L( Tm ) with G( ), N ( T )( T ) L( T ) p p for Type 0 ytem e for Type or higher ytem 0 p e ME4/TM34 Feedbck Cotrol Sytem 4
106 Stedy-Stte Error Sttic Error Cott For uit-rmp iput e R( ) lim 0 G( ) Sttic Velocity Error Cott, v i defied v lim G( ) 0 R ( ) d e lim lim 0 G( ) 0 G( ) d ( T )( Tb ) L( Tm ) with G( ), N ( T )( T ) L( T ) v v v 0 p for Type 0 ytem for Type ytem for Type or higher ytem e v e e e 0 ME4/TM34 Feedbck Cotrol Sytem 5
107 Stedy-Stte Error Sttic Error Cott For uit-ccelertio iput t r( t) for t 0, R ( ) ME4/TM34 Feedbck Cotrol Sytem e d R( ) lim 0 G( ) Sttic Accelertio Error Cott, i defied d ( T )( Tb ) L( Tm ) with G( ), N ( T )( T ) L( T ) 0 lim G( ) 0 p for Type 0 d Type ytem for Type ytem for Type 3 or higher ytem 3 e e lim G( ) G( ) e e e lim 0 6
108 Stedy-Stte Error Summry of tedy- Stte error Type 0 ytem Step Iput r Type ytem 0 Rmp Iput r t Type ytem 0 0 Accel. Iput r t / Type 0 ytem hve fiite tedy-tte error for tep iput d cot follow rmp iput. Type ytem hve zero tedy-tte error for tep iput, fiite error for rmp iput, d cot follow ccelertio iput. Type ytem re eeded to follow rmp iput with zero tedytte error. I geerl, the higher the ttic gi of the ope-loop trfer fuctio, G(), the mller the tedy-tte error. However, higher gi ormlly led to tbility problem. ME4/TM34 Feedbck Cotrol Sytem 7
109 Ed ME4/TM34 Feedbck Cotrol Sytem 8
110 ME4/ME4E Feedbck Cotrol Sytem Block Digrm Algebr ME4/TM34 Feedbck Cotrol Sytem
111 Block Digrm Repreettio A block digrm i grphicl tool c help u to viulize the model of ytem d evlute the mthemticl reltiohip betwee their elemet, uig their trfer fuctio. The Trfer Fuctio Block Iput R() G() Sytem C() Output G ( ) C( ) R( ) The trfer fuctio G() i defied oly for lier time-ivrit ytem d ot for olier ytem. I property of the ytem d i idepedet of the iput to the ytem. Commuttive G G GG Aocitive G G G G ME4/TM34 Feedbck Cotrol Sytem
112 Block Digrm Elemet The Summig Poit Siged iput Y X X Y - Z - Z output Ay umber of iput. Oly oe output ME4/TM34 Feedbck Cotrol Sytem 3
113 Block Digrm Algebr Whe mipultig block digrm, the origil reltiohip, or equtio, reltig the vriou vrible mut remi the me. Block i erie or ccded block X Y Z G G X G G Z Whe block re coected i erie, there mut be o lodig effect. ME4/TM34 Feedbck Cotrol Sytem 4
114 Block Digrm Algebr Block i prllel X G G Y X G G Y ME4/TM34 Feedbck Cotrol Sytem 5
115 ME4/TM34 Feedbck Cotrol Sytem 6 G Z X Y G Z X Y G X Y X G X Y X X G Y Z X G Y Z Block Digrm Algebr Block Digrm Algebr G G Z X Y G X Y /G X Z Y X G /G
116 Cloed-Loop Feedbck Sytem R E - G C B H R i clled the referece iput C i the output or cotrolled vrible B i the feedbck E (R B) i the error C E B E G GH i clled the feedforwrd trfer fuctio i clled the ope-loop trfer fuctio ME4/TM34 Feedbck Cotrol Sytem 7
117 Cloed-Loop Feedbck Sytem R E - B G H C C GE G(R B) G(R HC) C( GH) GR C R G GH C R i the cloed-loop trfer fuctio Alo E C G d E R G C R GH E R i clled the error trfer fuctio ME4/TM34 Feedbck Cotrol Sytem 8
118 Cloed-Loop Cotrol Feedbck Sytem D R E - M G c G p C B H G c G p M D i the cotroller trfer fuctio i the plt trfer fuctio i the mipulted vrible i the exterl diturbce C E G c G p i the feedforwrd trfer fuctio B E G G c p H i the ope-loop trfer fuctio ME4/TM34 Feedbck Cotrol Sytem 9
119 Cloed-Loop Cotrol Feedbck Sytem D R E M G c G p C - B H C R G GH G G c G G c p p H Aumig R 0, we c re-drw D C - G p G c H C D G GH G G p p G c H ME4/TM34 Feedbck Cotrol Sytem 0
120 Block Digrm Mipultio Exmple: Determie C()/R() D D E R - - F G C H I Whe mipultig block, mut eure C() doe ot chge, o tht C()/R() remi me. ME4/TM34 Feedbck Cotrol Sytem
121 Block Digrm Mipultio Exmple: Determie C()/R() We wih to move thi To move igl b to igl to before block F fter Block G Aume me of igl how b F-FcD b F-Fc(D/F)F ME4/TM34 Feedbck Cotrol Sytem
122 Block Digrm Mipultio Exmple: Determie C()/R() R - - D F D G E C R - D/F (D/F) - F b G E Eb C H H Gb I I E/G Eb C Gb Eb R - D/F - FG Gb C R - D/F - FG E/G C H H I C Gb (E/G)Gb I ME4/TM34 Feedbck Cotrol Sytem 3
123 Block Digrm Mipultio Exmple G GH R - D/F - FG H E/G C R - D/F FG FGH E/G C I I R - D FG F FGH I E G C R D FG E F FGH G D FG E I F FGH G C ME4/TM34 Feedbck Cotrol Sytem 4
124 Ed ME4/TM34 Feedbck Cotrol Sytem 5
125 ME4/ME4E Feedbck Cotrol Sytem Cocept of Sytem Stbility ME4/TM34 Feedbck Cotrol Sytem
126 ME4/TM34 Feedbck Cotrol Sytem Higher-Order Sytem repoe Higher-Order Sytem repoe Coider the cloed loop trfer fuctio Coider the cloed loop trfer fuctio ) ( ) ( ) ( ) ( ) ( D N G R C c c c m b b b b m m m m > with 0 0 L L The ytem i id to be higher-order ytem for >. There will be pole of G c (), or root of the deomitor D c (). G c () c thu be writte ) ( ) ( ) ( R C G c ) ( ) )( )( ( ) )( ( ) ( ) )( ( r r r q m p p p z z z ω ω ζ ω ω ζ ω ω ζ L L L ) ( r q where Rel Root Rel Root Complex root Complex root q j r k k k k k k k k k j j c b p ) ( ω ω ζ ζ ω ζω
127 ME4/TM34 Feedbck Cotrol Sytem 3 Higher-Order Sytem repoe Higher-Order Sytem repoe For uit tep iput, we c re-write C() i term of prtil frctio q j r k k k k k k k k k j j c b p C ) ( ) ( ω ω ζ ζ ω ζω i which we ume tht ll the pole re ditict, i.e. ot repeted. The time repoe will the be, by uig the Ivere Lplce Trform r k k k k j t t p j t e e t c k k j ) i( ) ( φ ω ζ ζ ω ζ where k k k ζ ζ φ t For tble repoe, the pole mut ll hve egtive rel prt. The repoe of tble higher-order ytem thu comprie um of umber of decyig expoetil curve d decyig dmped iuoidl curve.
128 Higher-Order Sytem repoe Plot of pole o the -ple Rel Pole d their effect o the repoe Im p p Re Rel pole o the S-Ple. Ech rel pole will cotribute term ito the repoe. The more egtive the pole, or the frther wy to the left from the Imgiry xi it i, the more rpidly the expoetil term decy to zero. I geerl, if two pole re uch tht p > 5 p, the the repoe cued by p i domit d tht for p c be eglected without lo of ccurcy. j e p t j ME4/TM34 Feedbck Cotrol Sytem 4
129 Higher-Order Sytem repoe Plot of pole o the -ple Complex cojugte pole d their effect o the repoe Im ζ k ω k Ech complex pir cotribute decyig dmped iuoidl term to the repoe. Lie of cott ζ ζω k φ The more egtive the rel prt ζω, k k or the frther wy to the left the pole Re re from the Imgiry xi, the more rpidly the term decy to zero. Complex cojugte pole o the S-Ple. φ k The gle the pole mke with the Rel Axi determie the dmpig rtio, the greter the gle, the le the dmpig rtio. φ k t ζ ζ k k ME4/TM34 Feedbck Cotrol Sytem 5
130 Some typicl repoe Stble ytem ME4/TM34 Feedbck Cotrol Sytem 6
131 Some typicl repoe Stble ytem ME4/TM34 Feedbck Cotrol Sytem 7
132 Some typicl repoe A Utble ytem ME4/TM34 Feedbck Cotrol Sytem 8
133 Higher-Order Sytem repoe Domit Pole Complex cojugte pole d their effect o the repoe Cloed-loop pole o the S-Ple. The reltive domice of cloedloop pole i determied by how fr they re from the Imgiry Axi, umig tht there re o zero erby. (Zero ffect the reltive mgitude of the cott term ocited with the pole, the cloer they re the more the effect.) Uully the repoe will be djuted uch tht oe pir of complex cojugte pole will be cloer to the Imgiry Axi reltive to ll the other pole d the repoe cued by thi pir domite the overll repoe. Thi pir i clled the domit cloed-loop pole. ME4/TM34 Feedbck Cotrol Sytem 9
134 Cocept of Sytem Stbility A ytem (lier or o-lier) i id to be BIBO (bouded iput, bouded output) tble if, for every bouded iput, the output i bouded for ll time. A LTI (Lier Time-Ivrit) ytem mut hve ll pole i the left-hlf of the -ple (egtive rel prt) for it to be tble. I other word, the root of the chrcteritic equtio mut ll hve egtive rel prt. If pole, or pole, lie o the imgiry xi, the ytem i criticlly, or limitedly, tble. If lier ytem i utble, eve i the bece of y iput, the output will grow without boud d become ifiitely lrge time goe to ifiity. ME4/TM34 Feedbck Cotrol Sytem 0
135 Routh Stbility Criterio A ytem i tble if ll the root of the ytem chrcteritic equtio hve egtive rel prt. G( ) H( ) 0 The problem i if the chrcteritic equtio i of order higher th two, it i ot ey to fid the root. (Of coure, there re computer progrm, e.g. MATLAB or OCTAVE, tht help with thi.) Fortutely, there i imple criterio, kow Routh Stbility Criterio (ometime lo kow the Routh-Hurwitz Stbility Criterio), which eble u to fid out the umber of root of the chrcteritic equtio tht lie o the right-hlf of the -ple, i.e. hve poitive rel prt, without hvig to fctor the chrcteritic polyomil. ME4/TM34 Feedbck Cotrol Sytem
136 Routh Stbility Criterio Procedure ) Form the chrcteritic equtio 0 S S S S 0 > 0 0 We ume tht 0; i.e. y zero root hve bee removed. Exmple: or ( ) 0 ue the equtio ) If y of the coefficiet i egtive or zero, the ytem i ot tble. 3) If ll the coefficiet re poitive, there i till o gurtee tht ll the root hve egtive rel prt. We the form the Routh Arry d ue the Routh Criterio to determie the umber of root with poitive rel prt. ME4/TM34 Feedbck Cotrol Sytem
137 ME4/TM34 Feedbck Cotrol Sytem f e e c c c b b b b L L L Routh Arry Routh Arry Routh Stbility Criterio Routh Stbility Criterio Chrcteritic equtio > S S S S > S S S S b b 3 0 b b b
138 ME4/TM34 Feedbck Cotrol Sytem f e e c c c b b b b L L L I developig the rry, etire row c be multiplied by poitive umber to implify the proce without ffectig the reult. I developig the rry, etire row c be multiplied by poitive umber to implify the proce without ffectig the reult. Routh Stbility Criterio Routh Stbility Criterio Similrly Similrly Routh Arry Routh Arry 3 b b b c 3 b b b c 3 5 b b b c 3 5 b b b c b b b c b b b c Routh Criterio tte tht the umber of root with poitive rel prt i equl to the umber of chge i ig of the coefficiet i the firt colum of the rry. Routh Criterio tte tht the umber of root with poitive rel prt i equl to the umber of chge i ig of the coefficiet i the firt colum of the rry. e e d d e f e e d d e f
139 Routh Stbility Criterio Exmple Determie the coditio for the followig equtio to hve oly root with egtive rel prt Routh Arry If 03 > 0, the there i o ig chge d there i o root with poitive rel prt. If, the there re two ig chge. Therefore 0 3 < 0 there re two root with poitive rel prt. ME4/TM34 Feedbck Cotrol Sytem 5
140 Routh Stbility Criterio Specil ce A zero occur i the firt colum of y row while the remiig term re ot zero, or there i o remiig term. Solutio: The zero term i replced by mll poitive umber d the rry i proceed ccordigly. Exmple Routh Arry ε 3 3 If the ig of the coefficiet i the row bove i the me tht below ( i thi ce), the there re pir of imgiry root. If the ig of the coefficiet i the row bove i differet from tht below, there i oe ig chge idictig oe root with poitive rel prt. ME4/TM34 Feedbck Cotrol Sytem 6
141 Routh Stbility Criterio Specil ce If ll the coefficiet, or the oly oe coefficiet, i derived row re zero, it me tht there re root of equl mgitude locted ymmetriclly bout the origi. Exmple: The chrcteritic equtio hve fctor uch ( σ )( σ ) or ( jω)( jω ). For uch ce, form uxiliry polyomil with the coefficiet of the row bove the ll-zero row d uig the coefficiet of the derivtive of thi polyomil to replce the ll-zero row. ME4/TM34 Feedbck Cotrol Sytem 7
142 Routh Stbility Criterio Specil ce Exmple Note tht becue ot ll the coefficiet re poitive, thi idicte tht there i t let oe root with poitive rel prt. Routh Arry Ue thi uxiliry polyomil 4 P( ) 48 P& ( ) New Routh Arry ME4/TM34 Feedbck Cotrol Sytem There i oe chge i ig i the firt colum oe root with ve rel prt. 8
143 Ed ME4/TM34 Feedbck Cotrol Sytem 9
144 ME4/ME4E Feedbck Cotrol Sytem Root Locu Alyi ME4/TM34 Feedbck Cotrol Sytem
145 Root Locu Alyi Coider the cloed-loop ytem R E - G C B H The triet repoe, d tbility, of the cloed-loop ytem i determied by the vlue of the root of the chrcteritic equtio G( ) H ( ) 0 or, i other word, the loctio of the cloed-loop pole o the ple. The ope-loop trfer fuctio c be writte i the form G( ) H ( ) where i djutble gi, the z d p re the zero d pole of the ope-loop trfer fuctio. A the gi chge, the vlue of the cloed-loop pole will chge d thu the triet repoe, d tbility. The root locu plot i plot of the loci of the cloed-loop pole o the -ple the gi vrie from 0 to ifiity. ME4/TM34 Feedbck Cotrol Sytem ( z )( z ( p )( p ) L( z ) L( m p ) )

146 Root Locu Alyi Exmple Coider the ytem with G( ) H ( ) ( )( ) Chrcteritic Eq: ( )( ) 0 Root Locu Plot Pole v P P P j j j j j j j j j j j j j j pole, thu 3 loci ME4/TM34 Feedbck Cotrol Sytem 3
147 Plottig the Root Loci The root loci re plotted either Mully, or Uig computer progrm uch OCTAVE (ey if you hve the progrm d kow how to ue it.) ME4/TM34 Feedbck Cotrol Sytem 4
148 Mul plottig Root Locu Cocept The Chrcteritic Equtio i firt writte i the form G( ) H( ) F( ) where i cott gi. 0 The root of the chrcteritic equtio re the vlue of which tify the equtio F( ) 80 for ±, ± 3, ± 5, Or whe F( ) 80 ±, ± 3, ± 5, The mgitude coditio i tified by hvig F( ) givig F( ) ME4/TM34 Feedbck Cotrol Sytem 5
149 Mul plottig Root Locu Cocept Determiig the phe gle for F() Coider G( ) H ( ) F( ) ( p )( ( z p )( ) p 3 )( p 4 ) The where F Note tht θ θ ± 360 ( 3 4 ) φ θ θ θ θ 80 φ θ θ θ θ ( ) z p ( ) ( ) p 3 ( p3,,3, ) ( 4 ) 4 p (z ) ±, ± 3, ± 5, (p ) φ -z -p θ Im 0 Re ME4/TM34 Feedbck Cotrol Sytem 6
150 Mul plottig Procedure d Guidelie ) Locte the pole d zero of the ope-loop trfer, G()H(), fuctio o the ple. ) There re my loci, or brche, pole of the G()H(). 3) Ech brch trt from pole of G()H() d ed i zero. If there re o zero i the fiite regio, the the zero re t ifiity. N( ) Reo: G( ) H ( ) 0 D( ) N( ) 0 D( ) Whe 0, D( ) 0 d root re root of D(). Whe >>, N ( ) 0 d root re root of N(). ME4/TM34 Feedbck Cotrol Sytem 7
151 Mul plottig Procedure d Guidelie 4) The loci exit o the rel xi oly to the left of odd umber of pole d/or zero. Complex pole d/or zero hve o effect becue, for poit o the rel xi, the gle ivolved re equl d oppoite. Coider tet poit,, o the rel xi how. Every pir of complex cojugte pole (or zero) will cotribute pir of gle, d uch tht θ θ θ θ 360 They c thu be igored. -z -3 θ -p - θ - θ 3 -p 3 Im j j 0 -j Re -p -j ME4/TM34 Feedbck Cotrol Sytem 8
152 Mul plottig Procedure d Guidelie 4) The loci exit o the rel xi oly to the left of odd umber of pole d/or zero. Complex pole d/or zero hve o effect becue, for poit o the rel xi, the gle ivolved re equl d oppoite. Coider tet poit,, o the rel xi how. Ech rel pole or zero to the left of poit doe ot cotribute to the gle um d thu c be igored. Ech pole/zero to the right of poit cotribute gle of ± 80. A odd umber of them will thu cotribute totl of 80 where ±, ± 3, ± 5, -z -3 θ -p -p - θ - θ 3 -p 3 Im j j 0 -j -j Re ME4/TM34 Feedbck Cotrol Sytem 9
153 Locu exit to left of odd No. of zero/pole Exmple: Coider the chrcteritic equtio GH ( 3) ( j)( j) ( z) ( p )( p ) F( ) Coider tet poit,, o the Oe rel zero t -z-3; xi to the left of the pole t 0. Oe zero t 0; -p Im j j Complex cojugte pole t -p--j, d -p-j -z p 0 0 Re -j -p -j ME4/TM34 Feedbck Cotrol Sytem 0
154 Locu exit to left of odd No. of zero/pole Exmple: Coider the chrcteritic equtio GH ( 3) ( j)( j) ( z) ( p )( p ) F( ) Coider tet poit, S, o the rel xi to the left of ONE pole t 0. -p Im j Thi tet poit will be prt of the root locu if F( ) 80 p θ j Or φ θ θ θ 80 3 Note tht, d θ ϑ θ 3 0 φ 0 80 Poit S form prt of the root locu. -z φ -3 z p - θ 3 -p - θp 0 0 -j -j Re ME4/TM34 Feedbck Cotrol Sytem
155 Locu exit to left of odd No. of zero/pole Exmple: Coider the chrcteritic equtio GH ( 3) ( z) F( ) ( j)( j) ( p )( p ) Coider tet poit, S, o the rel xi to the left of the zero t -3. Note tht, d Thu ϑ θ 3 0 φ θ 80 F() 0 -p -p p -z φ -3-3 θ Im Im j j j j pθ 0 00 Re Re Poit S i ot prt of of the root locu. Note S i to the left of eve No. of zero/pole z p -p -p θ 3 -j -j -j -j ME4/TM34 Feedbck Cotrol Sytem
156 Mul plottig Procedure d Guidelie 5) Becue complex root mut occur i cojugte pir, i.e. ymmetricl bout the rel xi, the root-locu plot i ymmetricl bout the rel xi. 6) Loci which termite t ifiity pproch ymptote i doig o. For tet poit S t ifiity, ech pole/zero cotribute equl phe gle. Thu for ( Z P) θ 80 ±, ± 3, ± 5, -p θ -z -p θ θ Im 0 Re Z/PNo. of zero/pole θ θ 80 Z P -p 3 ME4/TM34 Feedbck Cotrol Sytem 3
157 Mul plottig Procedure d Guidelie 7) All the ymptote trt from poit o the rel xi with coordite Im σ pi P Z Exmple: For m z i j j G( ) H ( ) ( )( ) Re The θ 60, 80, 300 Z P 0 3 -j -j σ ME4/TM34 Feedbck Cotrol Sytem 4
158 Mul plottig Procedure d Guidelie 8) Brek-i d brekwy poit (o rel xi) At brek-i poit, vlue of icree the loci move oto the rel xi d wy from the brek-i poit. At brekwy poit, vlue of icree log the rel xi from both ide d rech mximum t the brekwy poit. Alog the rel xi,. σ Thu, t the brek-i or brekwy poit, d d σ provided >0 d root loci. ME4/TM34 Feedbck Cotrol Sytem 0 σ exit o the Brek-i pt. Brekwy pt. 5
159 Mul plottig Procedure d Guidelie 9) Imgiry Axi Croig Two pproche: ) Ue Routh Criteri to determie the vlue of t which the ytem i criticlly tble. Thi i idicted by vlue of zero i the firt colum but with o ig chge i the firt colum of the Routh Arry. b) Sice the root re o the imgiry xi, by lettig jω i the chrcteritic equtio d olve for ω d. Thi i doe by equtig both the rel d imgiry prt of the chrcteritic equtio to zero. Im Axi Croig ME4/TM34 Feedbck Cotrol Sytem 6
160 Mul plottig Procedure d Guidelie 0) Agle of Deprture from complex pole d Agle of Arrivl from complex zero. Agle of Deprture Thi i doe by tkig tet poit very cloe to the complex pole, or zero, d pplyig the gulr criteri. ME4/TM34 Feedbck Cotrol Sytem 7
161 Mul plottig Procedure d Guidelie 0) Agle of Deprture from complex pole d Agle of Arrivl from complex zero. θ Im -p Thi i doe by tkig tet poit very cloe to the complex pole, or zero, d pplyig the gulr criteri. Exmple, for digrm o right, -z φ 0 Re φ ( θ θ ) ± 80 θ -p ME4/TM34 Feedbck Cotrol Sytem 8
162 Exmple Root Locu Plot MATLAB Progrm >> ghtf([],[ 0]) Trfer fuctio: ^3 ^ >> rlocu(gh) Pole t 0, ± j ME4/TM34 Feedbck Cotrol Sytem 9
163 Exmple Root Locu Plot MATLAB Progrm >> hzpk([-3-4],[0 -],[]) Zero/pole/gi: (3) (4) () >> rlocu(h) >> Pole t 0, - Zero t -3, -4 ME4/TM34 Feedbck Cotrol Sytem 0
164 Exmple Root Locu Plot MATLAB Progrm >> gtf([],[ 5]) Trfer fuctio: ^ 5 >> gzpk([-],[0 -],[]) Zero/pole/gi: () () >> ghg*g Zero/pole/gi: () () (^ 5) >> rlocu(gh) Pole t Zero t 0,, ± j ME4/TM34 Feedbck Cotrol Sytem
![Exmple Root Locu Plot MATLAB Progrm >> gtf([],[ 5]) Trfer fuctio: ------------- ^ 5 >> gzpk([],[0-4],[]) Zero/pole/gi:](/docs-images/73/68152945/images/165-0.jpg "------- (4) >> ghg*g Zero/pole/gi: ---------------------- (4) (^ 5) >> rlocu(gh) Pole t 0, 4, ± j ME4/TM34 Feedbck Cotrol")
165 Exmple Root Locu Plot MATLAB Progrm >> gtf([],[ 5]) Trfer fuctio: ^ 5 >> gzpk([],[0-4],[]) Zero/pole/gi: (4) >> ghg*g Zero/pole/gi: (4) (^ 5) >> rlocu(gh) Pole t 0, 4, ± j ME4/TM34 Feedbck Cotrol Sytem
Chapter #2 EEE Subsea Control and Communication Systems
 EEE 87 Chpter # EEE 87 Sube Cotrol d Commuictio Sytem Trfer fuctio Pole loctio d -ple Time domi chrcteritic Extr pole d zero Chpter /8 EEE 87 Trfer fuctio Lplce Trform Ued oly o LTI ytem Differetil expreio
EEE 87 Chpter # EEE 87 Sube Cotrol d Commuictio Sytem Trfer fuctio Pole loctio d -ple Time domi chrcteritic Extr pole d zero Chpter /8 EEE 87 Trfer fuctio Lplce Trform Ued oly o LTI ytem Differetil expreio
ELEC 372 LECTURE NOTES, WEEK 6 Dr. Amir G. Aghdam Concordia University
 ELEC 37 LECTURE NOTES, WEE 6 Dr mir G ghdm Cocordi Uiverity Prt of thee ote re dpted from the mteril i the followig referece: Moder Cotrol Sytem by Richrd C Dorf d Robert H Bihop, Pretice Hll Feedbck Cotrol
ELEC 37 LECTURE NOTES, WEE 6 Dr mir G ghdm Cocordi Uiverity Prt of thee ote re dpted from the mteril i the followig referece: Moder Cotrol Sytem by Richrd C Dorf d Robert H Bihop, Pretice Hll Feedbck Cotrol
Chapter #5 EEE Control Systems
 Sprig EEE Chpter #5 EEE Cotrol Sytem Deig Bed o Root Locu Chpter / Sprig EEE Deig Bed Root Locu Led Cotrol (equivlet to PD cotrol) Ued whe the tedy tte propertie of the ytem re ok but there i poor performce,
Sprig EEE Chpter #5 EEE Cotrol Sytem Deig Bed o Root Locu Chpter / Sprig EEE Deig Bed Root Locu Led Cotrol (equivlet to PD cotrol) Ued whe the tedy tte propertie of the ytem re ok but there i poor performce,
Chap8 - Freq 1. Frequency Response
 Chp8 - Freq Frequecy Repoe Chp8 - Freq Aged Prelimirie Firt order ytem Frequecy repoe Low-p filter Secod order ytem Clicl olutio Frequecy repoe Higher order ytem Chp8 - Freq 3 Frequecy repoe Stedy-tte
Chp8 - Freq Frequecy Repoe Chp8 - Freq Aged Prelimirie Firt order ytem Frequecy repoe Low-p filter Secod order ytem Clicl olutio Frequecy repoe Higher order ytem Chp8 - Freq 3 Frequecy repoe Stedy-tte
Chapter #3 EEE Subsea Control and Communication Systems
 EEE 87 Chter #3 EEE 87 Sube Cotrol d Commuictio Sytem Cloed loo ytem Stedy tte error PID cotrol Other cotroller Chter 3 /3 EEE 87 Itroductio The geerl form for CL ytem: C R ', where ' c ' H or Oe Loo (OL)
EEE 87 Chter #3 EEE 87 Sube Cotrol d Commuictio Sytem Cloed loo ytem Stedy tte error PID cotrol Other cotroller Chter 3 /3 EEE 87 Itroductio The geerl form for CL ytem: C R ', where ' c ' H or Oe Loo (OL)
ME2142/TM3142 Introduction to Feedback Control Systems First half: Professor POO Aun Neow Second half: Professor V Subramaniam
 ME4/TM34 Itroductio to Feedbck Cotrol Syte Firt hlf: Profeor POO Au Neow Secod hlf: Profeor V Subri Textbook: Textbook: Moder Moder Cotrol Cotrol Syte Syte by by Richrd Richrd Doff Doff d d Robert Robert
ME4/TM34 Itroductio to Feedbck Cotrol Syte Firt hlf: Profeor POO Au Neow Secod hlf: Profeor V Subri Textbook: Textbook: Moder Moder Cotrol Cotrol Syte Syte by by Richrd Richrd Doff Doff d d Robert Robert
Mathematical modeling of dynamic systems: Chapter 3: Mathematical modeling of dynamic systems. Linearization of nonlinear systems:
 hpter : themticl modelig of dymic ytem Itructor: S. Frhdi themticl modelig of dymic ytem: Simplicity veru ccurcy: it i poible to improve the ccurcy of mthemticl model by icreig it compleity. Lier ytem:
hpter : themticl modelig of dymic ytem Itructor: S. Frhdi themticl modelig of dymic ytem: Simplicity veru ccurcy: it i poible to improve the ccurcy of mthemticl model by icreig it compleity. Lier ytem:
Frequency-domain Characteristics of Discrete-time LTI Systems
 requecy-domi Chrcteristics of Discrete-time LTI Systems Prof. Siripog Potisuk LTI System descriptio Previous bsis fuctio: uit smple or DT impulse The iput sequece is represeted s lier combitio of shifted
requecy-domi Chrcteristics of Discrete-time LTI Systems Prof. Siripog Potisuk LTI System descriptio Previous bsis fuctio: uit smple or DT impulse The iput sequece is represeted s lier combitio of shifted
ROUTH-HURWITZ CRITERION
 Automti Cotrol Sytem, Deprtmet of Mehtroi Egieerig, Germ Jordi Uiverity Routh-Hurwitz Criterio ite.google.om/ite/ziydmoud 7 ROUTH-HURWITZ CRITERION The Routh-Hurwitz riterio i lytil proedure for determiig
Automti Cotrol Sytem, Deprtmet of Mehtroi Egieerig, Germ Jordi Uiverity Routh-Hurwitz Criterio ite.google.om/ite/ziydmoud 7 ROUTH-HURWITZ CRITERION The Routh-Hurwitz riterio i lytil proedure for determiig
Note 7 Root-Locus Techniques
 Lecture Note of Cotrol Syte I - ME 43/Alyi d Sythei of Lier Cotrol Syte - ME862 Note 7 Root-Locu Techique Deprtet of Mechicl Egieerig, Uiverity Of Sktchew, 57 Cpu Drive, Sktoo, S S7N 5A9, Cd Lecture Note
Lecture Note of Cotrol Syte I - ME 43/Alyi d Sythei of Lier Cotrol Syte - ME862 Note 7 Root-Locu Techique Deprtet of Mechicl Egieerig, Uiverity Of Sktchew, 57 Cpu Drive, Sktoo, S S7N 5A9, Cd Lecture Note
DEPARTMENT OF ELECTRICAL &ELECTRONICS ENGINEERING SIGNALS AND SYSTEMS. Assoc. Prof. Dr. Burak Kelleci. Spring 2018
 DEPARTMENT OF ELECTRICAL &ELECTRONICS ENGINEERING SIGNALS AND SYSTEMS Assoc. Prof. Dr. Bur Kelleci Sprig 8 OUTLINE The Z-Trsform The Regio of covergece for the Z-trsform The Iverse Z-Trsform Geometric
DEPARTMENT OF ELECTRICAL &ELECTRONICS ENGINEERING SIGNALS AND SYSTEMS Assoc. Prof. Dr. Bur Kelleci Sprig 8 OUTLINE The Z-Trsform The Regio of covergece for the Z-trsform The Iverse Z-Trsform Geometric
All the Laplace Transform you will encounter has the following form: Rational function X(s)
") EE G Note: Chpter Itructor: Cheug Pge - - Iverio of Rtiol Fuctio All the Lplce Trform you will ecouter h the followig form: m m m m e τ 0...... Rtiol fuctio Dely Why? Rtiol fuctio come out turlly from
EE G Note: Chpter Itructor: Cheug Pge - - Iverio of Rtiol Fuctio All the Lplce Trform you will ecouter h the followig form: m m m m e τ 0...... Rtiol fuctio Dely Why? Rtiol fuctio come out turlly from
Chapter 10: The Z-Transform Adapted from: Lecture notes from MIT, Binghamton University Dr. Hamid R. Rabiee Fall 2013
 Sigls & Systems Chpter 0: The Z-Trsform Adpted from: Lecture otes from MIT, Bighmto Uiversity Dr. Hmid R. Rbiee Fll 03 Lecture 5 Chpter 0 Lecture 6 Chpter 0 Outlie Itroductio to the -Trsform Properties
Sigls & Systems Chpter 0: The Z-Trsform Adpted from: Lecture otes from MIT, Bighmto Uiversity Dr. Hmid R. Rbiee Fll 03 Lecture 5 Chpter 0 Lecture 6 Chpter 0 Outlie Itroductio to the -Trsform Properties
UNIT #5 SEQUENCES AND SERIES COMMON CORE ALGEBRA II
 Awer Key Nme: Dte: UNIT # SEQUENCES AND SERIES COMMON CORE ALGEBRA II Prt I Quetio. For equece defied by f? () () 08 6 6 f d f f, which of the followig i the vlue of f f f f f f 0 6 6 08 (). I the viul
Awer Key Nme: Dte: UNIT # SEQUENCES AND SERIES COMMON CORE ALGEBRA II Prt I Quetio. For equece defied by f? () () 08 6 6 f d f f, which of the followig i the vlue of f f f f f f 0 6 6 08 (). I the viul
=> PARALLEL INTERCONNECTION. Basic Properties LTI Systems. The Commutative Property. Convolution. The Commutative Property. The Distributive Property
 Lier Time-Ivrit Bsic Properties LTI The Commuttive Property The Distributive Property The Associtive Property Ti -6.4 / Chpter Covolutio y ] x ] ] x ]* ] x ] ] y] y ( t ) + x( τ ) h( t τ ) dτ x( t) * h(
Lier Time-Ivrit Bsic Properties LTI The Commuttive Property The Distributive Property The Associtive Property Ti -6.4 / Chpter Covolutio y ] x ] ] x ]* ] x ] ] y] y ( t ) + x( τ ) h( t τ ) dτ x( t) * h(
EVALUATING DEFINITE INTEGRALS
 Chpter 4 EVALUATING DEFINITE INTEGRALS If the defiite itegrl represets re betwee curve d the x-xis, d if you c fid the re by recogizig the shpe of the regio, the you c evlute the defiite itegrl. Those
Chpter 4 EVALUATING DEFINITE INTEGRALS If the defiite itegrl represets re betwee curve d the x-xis, d if you c fid the re by recogizig the shpe of the regio, the you c evlute the defiite itegrl. Those
THE NATIONAL UNIVERSITY OF IRELAND, CORK COLÁISTE NA hollscoile, CORCAIGH UNIVERSITY COLLEGE, CORK SUMMER EXAMINATION 2005 FIRST ENGINEERING
 OLLSCOIL NA héireann, CORCAIGH THE NATIONAL UNIVERSITY OF IRELAND, CORK COLÁISTE NA hollscoile, CORCAIGH UNIVERSITY COLLEGE, CORK SUMMER EXAMINATION 2005 FIRST ENGINEERING MATHEMATICS MA008 Clculus d Lier
OLLSCOIL NA héireann, CORCAIGH THE NATIONAL UNIVERSITY OF IRELAND, CORK COLÁISTE NA hollscoile, CORCAIGH UNIVERSITY COLLEGE, CORK SUMMER EXAMINATION 2005 FIRST ENGINEERING MATHEMATICS MA008 Clculus d Lier
Section 6.3: Geometric Sequences
 40 Chpter 6 Sectio 6.: Geometric Sequeces My jobs offer ul cost-of-livig icrese to keep slries cosistet with ifltio. Suppose, for exmple, recet college grdute fids positio s sles mger erig ul slry of $6,000.
40 Chpter 6 Sectio 6.: Geometric Sequeces My jobs offer ul cost-of-livig icrese to keep slries cosistet with ifltio. Suppose, for exmple, recet college grdute fids positio s sles mger erig ul slry of $6,000.
ELEC 372 LECTURE NOTES, WEEK 4 Dr. Amir G. Aghdam Concordia University
 ELEC 37 LECTURE NOTES, WEE 4 Dr Amir G Aghdam Cocordia Uiverity Part of thee ote are adapted from the material i the followig referece: Moder Cotrol Sytem by Richard C Dorf ad Robert H Bihop, Pretice Hall
ELEC 37 LECTURE NOTES, WEE 4 Dr Amir G Aghdam Cocordia Uiverity Part of thee ote are adapted from the material i the followig referece: Moder Cotrol Sytem by Richard C Dorf ad Robert H Bihop, Pretice Hall
Chapter 10: The Z-Transform Adapted from: Lecture notes from MIT, Binghamton University Hamid R. Rabiee Arman Sepehr Fall 2010
 Sigls & Systems Chpter 0: The Z-Trsform Adpted from: Lecture otes from MIT, Bighmto Uiversity Hmid R. Riee Arm Sepehr Fll 00 Lecture 5 Chpter 0 Outlie Itroductio to the -Trsform Properties of the ROC of
Sigls & Systems Chpter 0: The Z-Trsform Adpted from: Lecture otes from MIT, Bighmto Uiversity Hmid R. Riee Arm Sepehr Fll 00 Lecture 5 Chpter 0 Outlie Itroductio to the -Trsform Properties of the ROC of
BC Calculus Path to a Five Problems
 BC Clculus Pth to Five Problems # Topic Completed U -Substitutio Rule Itegrtio by Prts 3 Prtil Frctios 4 Improper Itegrls 5 Arc Legth 6 Euler s Method 7 Logistic Growth 8 Vectors & Prmetrics 9 Polr Grphig
BC Clculus Pth to Five Problems # Topic Completed U -Substitutio Rule Itegrtio by Prts 3 Prtil Frctios 4 Improper Itegrls 5 Arc Legth 6 Euler s Method 7 Logistic Growth 8 Vectors & Prmetrics 9 Polr Grphig
INTEGRATION TECHNIQUES (TRIG, LOG, EXP FUNCTIONS)
") Mthemtics Revisio Guides Itegrtig Trig, Log d Ep Fuctios Pge of MK HOME TUITION Mthemtics Revisio Guides Level: AS / A Level AQA : C Edecel: C OCR: C OCR MEI: C INTEGRATION TECHNIQUES (TRIG, LOG, EXP FUNCTIONS)
Mthemtics Revisio Guides Itegrtig Trig, Log d Ep Fuctios Pge of MK HOME TUITION Mthemtics Revisio Guides Level: AS / A Level AQA : C Edecel: C OCR: C OCR MEI: C INTEGRATION TECHNIQUES (TRIG, LOG, EXP FUNCTIONS)
2.1.1 Definition The Z-transform of a sequence x [n] is simply defined as (2.1) X re x k re x k r
![2.1.1 Definition The Z-transform of a sequence x [n] is simply defined as (2.1) X re x k re x k r](/thumbs/82/85448174.jpg "2.1.1 Definition The Z-transform of a sequence x [n] is simply defined as (2.1) X re x k re x k r") Z-Trsforms. INTRODUCTION TO Z-TRANSFORM The Z-trsform is coveiet d vluble tool for represetig, lyig d desigig discrete-time sigls d systems. It plys similr role i discrete-time systems to tht which Lplce
Z-Trsforms. INTRODUCTION TO Z-TRANSFORM The Z-trsform is coveiet d vluble tool for represetig, lyig d desigig discrete-time sigls d systems. It plys similr role i discrete-time systems to tht which Lplce
SM2H. Unit 2 Polynomials, Exponents, Radicals & Complex Numbers Notes. 3.1 Number Theory
 SMH Uit Polyomils, Epoets, Rdicls & Comple Numbers Notes.1 Number Theory .1 Addig, Subtrctig, d Multiplyig Polyomils Notes Moomil: A epressio tht is umber, vrible, or umbers d vribles multiplied together.
SMH Uit Polyomils, Epoets, Rdicls & Comple Numbers Notes.1 Number Theory .1 Addig, Subtrctig, d Multiplyig Polyomils Notes Moomil: A epressio tht is umber, vrible, or umbers d vribles multiplied together.
EECE 301 Signals & Systems Prof. Mark Fowler
 EECE 30 Sigal & Sytem Prof. Mark Fowler Note Set #8 C-T Sytem: Laplace Traform Solvig Differetial Equatio Readig Aigmet: Sectio 6.4 of Kame ad Heck / Coure Flow Diagram The arrow here how coceptual flow
EECE 30 Sigal & Sytem Prof. Mark Fowler Note Set #8 C-T Sytem: Laplace Traform Solvig Differetial Equatio Readig Aigmet: Sectio 6.4 of Kame ad Heck / Coure Flow Diagram The arrow here how coceptual flow
State space systems analysis
 State pace ytem aalyi Repreetatio of a ytem i tate-pace (tate-pace model of a ytem To itroduce the tate pace formalim let u tart with a eample i which the ytem i dicuio i a imple electrical circuit with
State pace ytem aalyi Repreetatio of a ytem i tate-pace (tate-pace model of a ytem To itroduce the tate pace formalim let u tart with a eample i which the ytem i dicuio i a imple electrical circuit with
1. (25 points) Use the limit definition of the definite integral and the sum formulas to compute. [1 x + x2
 Use the limit definition of the definite integral and the sum formulas to compute. [1 x + x2") Mth 3, Clculus II Fil Exm Solutios. (5 poits) Use the limit defiitio of the defiite itegrl d the sum formuls to compute 3 x + x. Check your swer by usig the Fudmetl Theorem of Clculus. Solutio: The limit
Mth 3, Clculus II Fil Exm Solutios. (5 poits) Use the limit defiitio of the defiite itegrl d the sum formuls to compute 3 x + x. Check your swer by usig the Fudmetl Theorem of Clculus. Solutio: The limit
Introduction to Modern Control Theory
 Itroductio to Moder Cotrol Theory MM : Itroductio to Stte-Spce Method MM : Cotrol Deig for Full Stte Feedck MM 3: Etitor Deig MM 4: Itroductio of the Referece Iput MM 5: Itegrl Cotrol d Rout Trckig //4
Itroductio to Moder Cotrol Theory MM : Itroductio to Stte-Spce Method MM : Cotrol Deig for Full Stte Feedck MM 3: Etitor Deig MM 4: Itroductio of the Referece Iput MM 5: Itegrl Cotrol d Rout Trckig //4
0 otherwise. sin( nx)sin( kx) 0 otherwise. cos( nx) sin( kx) dx 0 for all integers n, k.
sin( kx) 0 otherwise. cos( nx) sin( kx) dx 0 for all integers n, k.") . Computtio of Fourier Series I this sectio, we compute the Fourier coefficiets, f ( x) cos( x) b si( x) d b, i the Fourier series To do this, we eed the followig result o the orthogolity of the trigoometric
. Computtio of Fourier Series I this sectio, we compute the Fourier coefficiets, f ( x) cos( x) b si( x) d b, i the Fourier series To do this, we eed the followig result o the orthogolity of the trigoometric
( a n ) converges or diverges.
 converges or diverges.") Chpter Ifiite Series Pge of Sectio E Rtio Test Chpter : Ifiite Series By the ed of this sectio you will be ble to uderstd the proof of the rtio test test series for covergece by pplyig the rtio test pprecite
Chpter Ifiite Series Pge of Sectio E Rtio Test Chpter : Ifiite Series By the ed of this sectio you will be ble to uderstd the proof of the rtio test test series for covergece by pplyig the rtio test pprecite
Area, Volume, Rotations, Newton s Method
 Are, Volume, Rottio, Newto Method Are etwee curve d the i A ( ) d Are etwee curve d the y i A ( y) yd yc Are etwee curve A ( ) g( ) d where ( ) i the "top" d g( ) i the "ottom" yd Are etwee curve A ( y)
Are, Volume, Rottio, Newto Method Are etwee curve d the i A ( ) d Are etwee curve d the y i A ( y) yd yc Are etwee curve A ( ) g( ) d where ( ) i the "top" d g( ) i the "ottom" yd Are etwee curve A ( y)
POWER SERIES R. E. SHOWALTER
 POWER SERIES R. E. SHOWALTER. sequeces We deote by lim = tht the limit of the sequece { } is the umber. By this we me tht for y ε > 0 there is iteger N such tht < ε for ll itegers N. This mkes precise
POWER SERIES R. E. SHOWALTER. sequeces We deote by lim = tht the limit of the sequece { } is the umber. By this we me tht for y ε > 0 there is iteger N such tht < ε for ll itegers N. This mkes precise
Remarks: (a) The Dirac delta is the function zero on the domain R {0}.
 The Dirac delta is the function zero on the domain R {0}.") Sectio Objective(s): The Dirc s Delt. Mi Properties. Applictios. The Impulse Respose Fuctio. 4.4.. The Dirc Delt. 4.4. Geerlized Sources Defiitio 4.4.. The Dirc delt geerlized fuctio is the limit δ(t)
Sectio Objective(s): The Dirc s Delt. Mi Properties. Applictios. The Impulse Respose Fuctio. 4.4.. The Dirc Delt. 4.4. Geerlized Sources Defiitio 4.4.. The Dirc delt geerlized fuctio is the limit δ(t)
BC Calculus Review Sheet
 BC Clculus Review Sheet Whe you see the words. 1. Fid the re of the ubouded regio represeted by the itegrl (sometimes 1 f ( ) clled horizotl improper itegrl). This is wht you thik of doig.... Fid the re
BC Clculus Review Sheet Whe you see the words. 1. Fid the re of the ubouded regio represeted by the itegrl (sometimes 1 f ( ) clled horizotl improper itegrl). This is wht you thik of doig.... Fid the re
Infinite Series Sequences: terms nth term Listing Terms of a Sequence 2 n recursively defined n+1 Pattern Recognition for Sequences Ex:
 Ifiite Series Sequeces: A sequece i defied s fuctio whose domi is the set of positive itegers. Usully it s esier to deote sequece i subscript form rther th fuctio ottio.,, 3, re the terms of the sequece
Ifiite Series Sequeces: A sequece i defied s fuctio whose domi is the set of positive itegers. Usully it s esier to deote sequece i subscript form rther th fuctio ottio.,, 3, re the terms of the sequece
Spherical refracting surface. Here, the outgoing rays are on the opposite side of the surface from the Incoming rays.
 Sphericl refrctig urfce Here, the outgoig ry re o the oppoite ide of the urfce from the Icomig ry. The oject i t P. Icomig ry PB d PV form imge t P. All prxil ry from P which trike the phericl urfce will
Sphericl refrctig urfce Here, the outgoig ry re o the oppoite ide of the urfce from the Icomig ry. The oject i t P. Icomig ry PB d PV form imge t P. All prxil ry from P which trike the phericl urfce will
Chapter 7 Infinite Series
 MA Ifiite Series Asst.Prof.Dr.Supree Liswdi Chpter 7 Ifiite Series Sectio 7. Sequece A sequece c be thought of s list of umbers writte i defiite order:,,...,,... 2 The umber is clled the first term, 2
MA Ifiite Series Asst.Prof.Dr.Supree Liswdi Chpter 7 Ifiite Series Sectio 7. Sequece A sequece c be thought of s list of umbers writte i defiite order:,,...,,... 2 The umber is clled the first term, 2
Options: Calculus. O C.1 PG #2, 3b, 4, 5ace O C.2 PG.24 #1 O D PG.28 #2, 3, 4, 5, 7 O E PG #1, 3, 4, 5 O F PG.
 O C. PG.-3 #, 3b, 4, 5ce O C. PG.4 # Optios: Clculus O D PG.8 #, 3, 4, 5, 7 O E PG.3-33 #, 3, 4, 5 O F PG.36-37 #, 3 O G. PG.4 #c, 3c O G. PG.43 #, O H PG.49 #, 4, 5, 6, 7, 8, 9, 0 O I. PG.53-54 #5, 8
O C. PG.-3 #, 3b, 4, 5ce O C. PG.4 # Optios: Clculus O D PG.8 #, 3, 4, 5, 7 O E PG.3-33 #, 3, 4, 5 O F PG.36-37 #, 3 O G. PG.4 #c, 3c O G. PG.43 #, O H PG.49 #, 4, 5, 6, 7, 8, 9, 0 O I. PG.53-54 #5, 8
Vectors. Vectors in Plane ( 2
 Vectors Vectors i Ple ( ) The ide bout vector is to represet directiol force Tht mes tht every vector should hve two compoets directio (directiol slope) d mgitude (the legth) I the ple we preset vector
Vectors Vectors i Ple ( ) The ide bout vector is to represet directiol force Tht mes tht every vector should hve two compoets directio (directiol slope) d mgitude (the legth) I the ple we preset vector
1.3 Continuous Functions and Riemann Sums
 mth riem sums, prt 0 Cotiuous Fuctios d Riem Sums I Exmple we sw tht lim Lower() = lim Upper() for the fuctio!! f (x) = + x o [0, ] This is o ccidet It is exmple of the followig theorem THEOREM Let f be
mth riem sums, prt 0 Cotiuous Fuctios d Riem Sums I Exmple we sw tht lim Lower() = lim Upper() for the fuctio!! f (x) = + x o [0, ] This is o ccidet It is exmple of the followig theorem THEOREM Let f be
Asymptotic Properties of Solutions of Two Dimensional Neutral Difference Systems
 Avilble t http://pvmuedu/m Appl Appl Mth ISSN: 192-9466 Vol 8, Iue 2 (December 21), pp 585 595 Applictio d Applied Mthemtic: A Itertiol Jourl (AAM) Aymptotic Propertie of Solutio of Two Dimeiol Neutrl
Avilble t http://pvmuedu/m Appl Appl Mth ISSN: 192-9466 Vol 8, Iue 2 (December 21), pp 585 595 Applictio d Applied Mthemtic: A Itertiol Jourl (AAM) Aymptotic Propertie of Solutio of Two Dimeiol Neutrl
Chapter 2 Infinite Series Page 1 of 9
 Chpter Ifiite eries Pge of 9 Chpter : Ifiite eries ectio A Itroductio to Ifiite eries By the ed of this sectio you will be ble to uderstd wht is met by covergece d divergece of ifiite series recogise geometric
Chpter Ifiite eries Pge of 9 Chpter : Ifiite eries ectio A Itroductio to Ifiite eries By the ed of this sectio you will be ble to uderstd wht is met by covergece d divergece of ifiite series recogise geometric
INFINITE SERIES. ,... having infinite number of terms is called infinite sequence and its indicated sum, i.e., a 1
 Appedix A.. Itroductio As discussed i the Chpter 9 o Sequeces d Series, sequece,,...,,... hvig ifiite umber of terms is clled ifiite sequece d its idicted sum, i.e., + + +... + +... is clled ifite series
Appedix A.. Itroductio As discussed i the Chpter 9 o Sequeces d Series, sequece,,...,,... hvig ifiite umber of terms is clled ifiite sequece d its idicted sum, i.e., + + +... + +... is clled ifite series
ROBUST STABILITY OF CONVEX COMBINATION OF TWO FRACTIONAL DEGREE CHARACTERISTIC POLYNOMIALS
 ct mechic et utomtic, vol.2 o.2 (28) ROBUST STABILITY OF CONVEX COMBINATION OF TWO FRACTIONAL DEGREE CHARACTERISTIC POLYNOMIALS Mikołj BUSŁOWICZ * * Chir of Automtic d Electroic, Fculty of Electricl Egieerig
ct mechic et utomtic, vol.2 o.2 (28) ROBUST STABILITY OF CONVEX COMBINATION OF TWO FRACTIONAL DEGREE CHARACTERISTIC POLYNOMIALS Mikołj BUSŁOWICZ * * Chir of Automtic d Electroic, Fculty of Electricl Egieerig
ELECTRONICS & COMMUNICATIONS DEP. 3rd YEAR, 2010/2011 CONTROL ENGINEERING. SHEET 2 Bode Plot
 CAIRO UNIVERITY FACULTY OF ENGINEERING ELECTRONIC & COMMUNICATION DEP. 3rd YEAR, 00/0 CONTROL ENGINEERING HEET Bode Plot [] Drw the symptotic Bode plots for ech of the followig trsfer fuctios: ) ( 0.5
CAIRO UNIVERITY FACULTY OF ENGINEERING ELECTRONIC & COMMUNICATION DEP. 3rd YEAR, 00/0 CONTROL ENGINEERING HEET Bode Plot [] Drw the symptotic Bode plots for ech of the followig trsfer fuctios: ) ( 0.5
Section IV.6: The Master Method and Applications
 Sectio IV.6: The Mster Method d Applictios Defiitio IV.6.1: A fuctio f is symptoticlly positive if d oly if there exists rel umer such tht f(x) > for ll x >. A cosequece of this defiitio is tht fuctio
Sectio IV.6: The Mster Method d Applictios Defiitio IV.6.1: A fuctio f is symptoticlly positive if d oly if there exists rel umer such tht f(x) > for ll x >. A cosequece of this defiitio is tht fuctio
z line a) Draw the single phase equivalent circuit. b) Calculate I BC.
 Draw the single phase equivalent circuit. b) Calculate I BC.") ECE 2260 F 08 HW 7 prob 4 solutio EX: V gyb' b' b B V gyc' c' c C = 101 0 V = 1 + j0.2 Ω V gyb' = 101 120 V = 6 + j0. Ω V gyc' = 101 +120 V z LΔ = 9 j1.5 Ω ) Drw the sigle phse equivlet circuit. b) Clculte
ECE 2260 F 08 HW 7 prob 4 solutio EX: V gyb' b' b B V gyc' c' c C = 101 0 V = 1 + j0.2 Ω V gyb' = 101 120 V = 6 + j0. Ω V gyc' = 101 +120 V z LΔ = 9 j1.5 Ω ) Drw the sigle phse equivlet circuit. b) Clculte
Week 13 Notes: 1) Riemann Sum. Aim: Compute Area Under a Graph. Suppose we want to find out the area of a graph, like the one on the right:
 Riemann Sum. Aim: Compute Area Under a Graph. Suppose we want to find out the area of a graph, like the one on the right:") Week 1 Notes: 1) Riem Sum Aim: Compute Are Uder Grph Suppose we wt to fid out the re of grph, like the oe o the right: We wt to kow the re of the red re. Here re some wys to pproximte the re: We cut the
Week 1 Notes: 1) Riem Sum Aim: Compute Are Uder Grph Suppose we wt to fid out the re of grph, like the oe o the right: We wt to kow the re of the red re. Here re some wys to pproximte the re: We cut the
Chapter System of Equations
 hpter 4.5 System of Equtios After redig th chpter, you should be ble to:. setup simulteous lier equtios i mtrix form d vice-vers,. uderstd the cocept of the iverse of mtrix, 3. kow the differece betwee
hpter 4.5 System of Equtios After redig th chpter, you should be ble to:. setup simulteous lier equtios i mtrix form d vice-vers,. uderstd the cocept of the iverse of mtrix, 3. kow the differece betwee
lecture 16: Introduction to Least Squares Approximation
 97 lecture 16: Itroductio to Lest Squres Approximtio.4 Lest squres pproximtio The miimx criterio is ituitive objective for pproximtig fuctio. However, i my cses it is more ppelig (for both computtio d
97 lecture 16: Itroductio to Lest Squres Approximtio.4 Lest squres pproximtio The miimx criterio is ituitive objective for pproximtig fuctio. However, i my cses it is more ppelig (for both computtio d
Content: Essential Calculus, Early Transcendentals, James Stewart, 2007 Chapter 1: Functions and Limits., in a set B.
 Review Sheet: Chpter Cotet: Essetil Clculus, Erly Trscedetls, Jmes Stewrt, 007 Chpter : Fuctios d Limits Cocepts, Defiitios, Lws, Theorems: A fuctio, f, is rule tht ssigs to ech elemet i set A ectly oe
Review Sheet: Chpter Cotet: Essetil Clculus, Erly Trscedetls, Jmes Stewrt, 007 Chpter : Fuctios d Limits Cocepts, Defiitios, Lws, Theorems: A fuctio, f, is rule tht ssigs to ech elemet i set A ectly oe
Definite Integral. The Left and Right Sums
 Clculus Li Vs Defiite Itegrl. The Left d Right Sums The defiite itegrl rises from the questio of fidig the re betwee give curve d x-xis o itervl. The re uder curve c be esily clculted if the curve is give
Clculus Li Vs Defiite Itegrl. The Left d Right Sums The defiite itegrl rises from the questio of fidig the re betwee give curve d x-xis o itervl. The re uder curve c be esily clculted if the curve is give
Taylor Polynomials. The Tangent Line. (a, f (a)) and has the same slope as the curve y = f (x) at that point. It is the best
) and has the same slope as the curve y = f (x) at that point. It is the best") Tylor Polyomils Let f () = e d let p() = 1 + + 1 + 1 6 3 Without usig clcultor, evlute f (1) d p(1) Ok, I m still witig With little effort it is possible to evlute p(1) = 1 + 1 + 1 (144) + 6 1 (178) =
Tylor Polyomils Let f () = e d let p() = 1 + + 1 + 1 6 3 Without usig clcultor, evlute f (1) d p(1) Ok, I m still witig With little effort it is possible to evlute p(1) = 1 + 1 + 1 (144) + 6 1 (178) =
Chapter 7. , and is unknown and n 30 then X ~ t n
 Chpter 7 Sectio 7. t-ditributio ( 3) Summry: C.L.T. : If the rdom mple of ize 3 come from ukow popultio with me d S.D. where i kow or ukow, the X ~ N,. Note: The hypothei tetig d cofidece itervl re built
Chpter 7 Sectio 7. t-ditributio ( 3) Summry: C.L.T. : If the rdom mple of ize 3 come from ukow popultio with me d S.D. where i kow or ukow, the X ~ N,. Note: The hypothei tetig d cofidece itervl re built
Graphing Review Part 3: Polynomials
 Grphig Review Prt : Polomils Prbols Recll, tht the grph of f ( ) is prbol. It is eve fuctio, hece it is smmetric bout the bout the -is. This mes tht f ( ) f ( ). Its grph is show below. The poit ( 0,0)
Grphig Review Prt : Polomils Prbols Recll, tht the grph of f ( ) is prbol. It is eve fuctio, hece it is smmetric bout the bout the -is. This mes tht f ( ) f ( ). Its grph is show below. The poit ( 0,0)
Chapter 11 Design of State Variable Feedback Systems
 Chpter Desig of Stte Vrible Feedbck Systems This chpter dels with the desig of cotrollers utilizig stte feedbck We will cosider three mjor subjects: Cotrollbility d observbility d the the procedure for
Chpter Desig of Stte Vrible Feedbck Systems This chpter dels with the desig of cotrollers utilizig stte feedbck We will cosider three mjor subjects: Cotrollbility d observbility d the the procedure for
The Reimann Integral is a formal limit definition of a definite integral
 MATH 136 The Reim Itegrl The Reim Itegrl is forml limit defiitio of defiite itegrl cotiuous fuctio f. The costructio is s follows: f ( x) dx for Reim Itegrl: Prtitio [, ] ito suitervls ech hvig the equl
MATH 136 The Reim Itegrl The Reim Itegrl is forml limit defiitio of defiite itegrl cotiuous fuctio f. The costructio is s follows: f ( x) dx for Reim Itegrl: Prtitio [, ] ito suitervls ech hvig the equl
1999 by CRC Press LLC
 Poulri A. D. The Melli Trform The Hdboo of Formul d Tble for Sigl Proceig. Ed. Alexder D. Poulri Boc Rto: CRC Pre LLC,999 999 by CRC Pre LLC 8 The Melli Trform 8. The Melli Trform 8. Propertie of Melli
Poulri A. D. The Melli Trform The Hdboo of Formul d Tble for Sigl Proceig. Ed. Alexder D. Poulri Boc Rto: CRC Pre LLC,999 999 by CRC Pre LLC 8 The Melli Trform 8. The Melli Trform 8. Propertie of Melli
Tranformations. Some slides adapted from Octavia Camps
 Trformtio Some lide dpted from Octvi Cmp A m 3 3 m m 3m m Mtrice 5K C c m ij A ij m b ij B A d B mut hve the me dimeio m 3 Mtrice p m m p B A C H @K?J H @K?J m k kj ik ij b c A d B mut hve A d B mut hve
Trformtio Some lide dpted from Octvi Cmp A m 3 3 m m 3m m Mtrice 5K C c m ij A ij m b ij B A d B mut hve the me dimeio m 3 Mtrice p m m p B A C H @K?J H @K?J m k kj ik ij b c A d B mut hve A d B mut hve
Unit 1. Extending the Number System. 2 Jordan School District
 Uit Etedig the Number System Jord School District Uit Cluster (N.RN. & N.RN.): Etedig Properties of Epoets Cluster : Etedig properties of epoets.. Defie rtiol epoets d eted the properties of iteger epoets
Uit Etedig the Number System Jord School District Uit Cluster (N.RN. & N.RN.): Etedig Properties of Epoets Cluster : Etedig properties of epoets.. Defie rtiol epoets d eted the properties of iteger epoets
Discrete-Time Signals & Systems
 Chpter 2 Discrete-Time Sigls & Systems 清大電機系林嘉文 cwli@ee.thu.edu.tw 03-57352 Discrete-Time Sigls Sigls re represeted s sequeces of umbers, clled smples Smple vlue of typicl sigl or sequece deoted s x =
Chpter 2 Discrete-Time Sigls & Systems 清大電機系林嘉文 cwli@ee.thu.edu.tw 03-57352 Discrete-Time Sigls Sigls re represeted s sequeces of umbers, clled smples Smple vlue of typicl sigl or sequece deoted s x =
 n. A Very Interesting Example + + = d. + x3. + 5x4. math 131 power series, part ii 7. One of the first power series we examined was. 2!
 mth power series, prt ii 7 A Very Iterestig Emple Oe of the first power series we emied ws! + +! + + +!! + I Emple 58 we used the rtio test to show tht the itervl of covergece ws (, ) Sice the series coverges
mth power series, prt ii 7 A Very Iterestig Emple Oe of the first power series we emied ws! + +! + + +!! + I Emple 58 we used the rtio test to show tht the itervl of covergece ws (, ) Sice the series coverges
The Exponential Function
 The Epoetil Fuctio Defiitio: A epoetil fuctio with bse is defied s P for some costt P where 0 d. The most frequetly used bse for epoetil fuctio is the fmous umber e.788... E.: It hs bee foud tht oyge cosumptio
The Epoetil Fuctio Defiitio: A epoetil fuctio with bse is defied s P for some costt P where 0 d. The most frequetly used bse for epoetil fuctio is the fmous umber e.788... E.: It hs bee foud tht oyge cosumptio
CONTROL SYSTEMS LABORATORY ECE311 LAB 3: Control Design Using the Root Locus
 CONTROL SYSTEMS LABORATORY ECE311 LAB 3: Control Deign Uing the Root Locu 1 Purpoe The purpoe of thi lbortory i to deign cruie control ytem for cr uing the root locu. 2 Introduction Diturbnce D( ) = d
CONTROL SYSTEMS LABORATORY ECE311 LAB 3: Control Deign Uing the Root Locu 1 Purpoe The purpoe of thi lbortory i to deign cruie control ytem for cr uing the root locu. 2 Introduction Diturbnce D( ) = d
Chapter Real Numbers
 Chpter. - Rel Numbers Itegers: coutig umbers, zero, d the egtive of the coutig umbers. ex: {,-3, -, -,,,, 3, } Rtiol Numbers: quotiets of two itegers with ozero deomitor; termitig or repetig decimls. ex:
Chpter. - Rel Numbers Itegers: coutig umbers, zero, d the egtive of the coutig umbers. ex: {,-3, -, -,,,, 3, } Rtiol Numbers: quotiets of two itegers with ozero deomitor; termitig or repetig decimls. ex:
A GENERAL METHOD FOR SOLVING ORDINARY DIFFERENTIAL EQUATIONS: THE FROBENIUS (OR SERIES) METHOD
 METHOD") Diol Bgoo () A GENERAL METHOD FOR SOLVING ORDINARY DIFFERENTIAL EQUATIONS: THE FROBENIUS (OR SERIES) METHOD I. Itroductio The first seprtio of vribles (see pplictios to Newto s equtios) is ver useful method
Diol Bgoo () A GENERAL METHOD FOR SOLVING ORDINARY DIFFERENTIAL EQUATIONS: THE FROBENIUS (OR SERIES) METHOD I. Itroductio The first seprtio of vribles (see pplictios to Newto s equtios) is ver useful method
MA123, Chapter 9: Computing some integrals (pp )
") MA13, Chpter 9: Computig some itegrls (pp. 189-05) Dte: Chpter Gols: Uderstd how to use bsic summtio formuls to evlute more complex sums. Uderstd how to compute its of rtiol fuctios t ifiity. Uderstd how
MA13, Chpter 9: Computig some itegrls (pp. 189-05) Dte: Chpter Gols: Uderstd how to use bsic summtio formuls to evlute more complex sums. Uderstd how to compute its of rtiol fuctios t ifiity. Uderstd how
u t u 0 ( 7) Intuitively, the maximum principles can be explained by the following observation. Recall
 Intuitively, the maximum principles can be explained by the following observation. Recall") Oct. Heat Equatio M aximum priciple I thi lecture we will dicu the maximum priciple ad uiquee of olutio for the heat equatio.. Maximum priciple. The heat equatio alo ejoy maximum priciple a the Laplace
Oct. Heat Equatio M aximum priciple I thi lecture we will dicu the maximum priciple ad uiquee of olutio for the heat equatio.. Maximum priciple. The heat equatio alo ejoy maximum priciple a the Laplace
MASSACHUSETTS INSTITUTE of TECHNOLOGY Department of Mechanical Engineering 2.71/ OPTICS - - Spring Term, 2014
 .7/.70 Optic, Spri 04, Solutio for Quiz MASSACHUSETTS INSTITUTE of TECHNOLOGY Deprtmet of Mechicl Eieeri.7/.70 OPTICS - - Spri Term, 04 Solutio for Quiz Iued Wed. 03//04 Problem. The ive opticl ytem i
.7/.70 Optic, Spri 04, Solutio for Quiz MASSACHUSETTS INSTITUTE of TECHNOLOGY Deprtmet of Mechicl Eieeri.7/.70 OPTICS - - Spri Term, 04 Solutio for Quiz Iued Wed. 03//04 Problem. The ive opticl ytem i
The Performance of Feedback Control Systems
 The Performace of Feedbac Cotrol Sytem Objective:. Secify the meaure of erformace time-domai the firt te i the deig roce Percet overhoot / Settlig time T / Time to rie / Steady-tate error e. ut igal uch
The Performace of Feedbac Cotrol Sytem Objective:. Secify the meaure of erformace time-domai the firt te i the deig roce Percet overhoot / Settlig time T / Time to rie / Steady-tate error e. ut igal uch
STABILITY and Routh-Hurwitz Stability Criterion
 Krdeniz Technicl Univerity Deprtment of Electricl nd Electronic Engineering 6080 Trbzon, Turkey Chpter 8- nd Routh-Hurwitz Stbility Criterion Bu der notlrı dece bu deri ln öğrencilerin kullnımın çık olup,
Krdeniz Technicl Univerity Deprtment of Electricl nd Electronic Engineering 6080 Trbzon, Turkey Chpter 8- nd Routh-Hurwitz Stbility Criterion Bu der notlrı dece bu deri ln öğrencilerin kullnımın çık olup,
MTH 146 Class 16 Notes
 MTH 46 Clss 6 Notes 0.4- Cotiued Motivtio: We ow cosider the rc legth of polr curve. Suppose we wish to fid the legth of polr curve curve i terms of prmetric equtios s: r f where b. We c view the cos si
MTH 46 Clss 6 Notes 0.4- Cotiued Motivtio: We ow cosider the rc legth of polr curve. Suppose we wish to fid the legth of polr curve curve i terms of prmetric equtios s: r f where b. We c view the cos si
PROGRESSIONS AND SERIES
 PROGRESSIONS AND SERIES A sequece is lso clled progressio. We ow study three importt types of sequeces: () The Arithmetic Progressio, () The Geometric Progressio, () The Hrmoic Progressio. Arithmetic Progressio.
PROGRESSIONS AND SERIES A sequece is lso clled progressio. We ow study three importt types of sequeces: () The Arithmetic Progressio, () The Geometric Progressio, () The Hrmoic Progressio. Arithmetic Progressio.
ELG4156 Design of State Variable Feedback Systems
 ELG456 Desig of Stte Vrible Feedbck Systems This chpter dels with the desig of cotrollers utilizig stte feedbck We will cosider three mjor subjects: Cotrollbility d observbility d the the procedure for
ELG456 Desig of Stte Vrible Feedbck Systems This chpter dels with the desig of cotrollers utilizig stte feedbck We will cosider three mjor subjects: Cotrollbility d observbility d the the procedure for
2. The Laplace Transform
 . The Lplce Trnform. Review of Lplce Trnform Theory Pierre Simon Mrqui de Lplce (749-87 French tronomer, mthemticin nd politicin, Miniter of Interior for 6 wee under Npoleon, Preident of Acdemie Frncie
. The Lplce Trnform. Review of Lplce Trnform Theory Pierre Simon Mrqui de Lplce (749-87 French tronomer, mthemticin nd politicin, Miniter of Interior for 6 wee under Npoleon, Preident of Acdemie Frncie
Linear Open Loop Systems
 Colordo School of Me CHEN43 Trfer Fucto Ler Ope Loop Sytem Ler Ope Loop Sytem... Trfer Fucto for Smple Proce... Exmple Trfer Fucto Mercury Thermometer... 2 Derblty of Devto Vrble... 3 Trfer Fucto for Proce
Colordo School of Me CHEN43 Trfer Fucto Ler Ope Loop Sytem Ler Ope Loop Sytem... Trfer Fucto for Smple Proce... Exmple Trfer Fucto Mercury Thermometer... 2 Derblty of Devto Vrble... 3 Trfer Fucto for Proce
Math 3B Midterm Review
 Mth 3B Midterm Review Writte by Victori Kl vtkl@mth.ucsb.edu SH 643u Office Hours: R 11:00 m - 1:00 pm Lst updted /15/015 Here re some short otes o Sectios 7.1-7.8 i your ebook. The best idictio of wht
Mth 3B Midterm Review Writte by Victori Kl vtkl@mth.ucsb.edu SH 643u Office Hours: R 11:00 m - 1:00 pm Lst updted /15/015 Here re some short otes o Sectios 7.1-7.8 i your ebook. The best idictio of wht
Approximate Integration
 Study Sheet (7.7) Approimte Itegrtio I this sectio, we will ler: How to fid pproimte vlues of defiite itegrls. There re two situtios i which it is impossile to fid the ect vlue of defiite itegrl. Situtio:
Study Sheet (7.7) Approimte Itegrtio I this sectio, we will ler: How to fid pproimte vlues of defiite itegrls. There re two situtios i which it is impossile to fid the ect vlue of defiite itegrl. Situtio:
National Quali cations AHEXEMPLAR PAPER ONLY
 Ntiol Quli ctios AHEXEMPLAR PAPER ONLY EP/AH/0 Mthemtics Dte Not pplicble Durtio hours Totl mrks 00 Attempt ALL questios. You my use clcultor. Full credit will be give oly to solutios which coti pproprite
Ntiol Quli ctios AHEXEMPLAR PAPER ONLY EP/AH/0 Mthemtics Dte Not pplicble Durtio hours Totl mrks 00 Attempt ALL questios. You my use clcultor. Full credit will be give oly to solutios which coti pproprite
SUTCLIFFE S NOTES: CALCULUS 2 SWOKOWSKI S CHAPTER 11
 UTCLIFFE NOTE: CALCULU WOKOWKI CHAPTER Ifiite eries Coverget or Diverget eries Cosider the sequece If we form the ifiite sum 0, 00, 000, 0 00 000, we hve wht is clled ifiite series We wt to fid the sum
UTCLIFFE NOTE: CALCULU WOKOWKI CHAPTER Ifiite eries Coverget or Diverget eries Cosider the sequece If we form the ifiite sum 0, 00, 000, 0 00 000, we hve wht is clled ifiite series We wt to fid the sum
Student Success Center Elementary Algebra Study Guide for the ACCUPLACER (CPT)
") Studet Success Ceter Elemetry Algebr Study Guide for the ACCUPLACER (CPT) The followig smple questios re similr to the formt d cotet of questios o the Accuplcer Elemetry Algebr test. Reviewig these smples
Studet Success Ceter Elemetry Algebr Study Guide for the ACCUPLACER (CPT) The followig smple questios re similr to the formt d cotet of questios o the Accuplcer Elemetry Algebr test. Reviewig these smples
Statistics for Financial Engineering Session 1: Linear Algebra Review March 18 th, 2006
 Sttistics for Ficil Egieerig Sessio : Lier Algebr Review rch 8 th, 6 Topics Itroductio to trices trix opertios Determits d Crmer s rule Eigevlues d Eigevectors Quiz The cotet of Sessio my be fmilir to
Sttistics for Ficil Egieerig Sessio : Lier Algebr Review rch 8 th, 6 Topics Itroductio to trices trix opertios Determits d Crmer s rule Eigevlues d Eigevectors Quiz The cotet of Sessio my be fmilir to
Schrödinger Equation Via Laplace-Beltrami Operator
 IOSR Jourl of Mthemtics (IOSR-JM) e-issn: 78-578, p-issn: 39-765X. Volume 3, Issue 6 Ver. III (Nov. - Dec. 7), PP 9-95 www.iosrjourls.org Schrödiger Equtio Vi Lplce-Beltrmi Opertor Esi İ Eskitşçioğlu,
IOSR Jourl of Mthemtics (IOSR-JM) e-issn: 78-578, p-issn: 39-765X. Volume 3, Issue 6 Ver. III (Nov. - Dec. 7), PP 9-95 www.iosrjourls.org Schrödiger Equtio Vi Lplce-Beltrmi Opertor Esi İ Eskitşçioğlu,
10.5 Power Series. In this section, we are going to start talking about power series. A power series is a series of the form
 0.5 Power Series I the lst three sectios, we ve spet most of tht time tlkig bout how to determie if series is coverget or ot. Now it is time to strt lookig t some specific kids of series d we will evetully
0.5 Power Series I the lst three sectios, we ve spet most of tht time tlkig bout how to determie if series is coverget or ot. Now it is time to strt lookig t some specific kids of series d we will evetully
Qn Suggested Solution Marking Scheme 1 y. G1 Shape with at least 2 [2]
![Qn Suggested Solution Marking Scheme 1 y. G1 Shape with at least 2 [2]](/thumbs/92/110299844.jpg "Qn Suggested Solution Marking Scheme 1 y. G1 Shape with at least 2 [2]") Mrkig Scheme for HCI 8 Prelim Pper Q Suggested Solutio Mrkig Scheme y G Shpe with t lest [] fetures correct y = f'( ) G ll fetures correct SR: The mimum poit could be i the first or secod qudrt. -itercept
Mrkig Scheme for HCI 8 Prelim Pper Q Suggested Solutio Mrkig Scheme y G Shpe with t lest [] fetures correct y = f'( ) G ll fetures correct SR: The mimum poit could be i the first or secod qudrt. -itercept
ALGEBRA. Set of Equations. have no solution 1 b1. Dependent system has infinitely many solutions
 Qudrtic Equtios ALGEBRA Remider theorem: If f() is divided b( ), the remider is f(). Fctor theorem: If ( ) is fctor of f(), the f() = 0. Ivolutio d Evlutio ( + b) = + b + b ( b) = + b b ( + b) 3 = 3 +
Qudrtic Equtios ALGEBRA Remider theorem: If f() is divided b( ), the remider is f(). Fctor theorem: If ( ) is fctor of f(), the f() = 0. Ivolutio d Evlutio ( + b) = + b + b ( b) = + b b ( + b) 3 = 3 +
Numerical Solutions of Fredholm Integral Equations Using Bernstein Polynomials
 Numericl Solutios of Fredholm Itegrl Equtios Usig erstei Polyomils A. Shiri, M. S. Islm Istitute of Nturl Scieces, Uited Itertiol Uiversity, Dhk-, gldesh Deprtmet of Mthemtics, Uiversity of Dhk, Dhk-,
Numericl Solutios of Fredholm Itegrl Equtios Usig erstei Polyomils A. Shiri, M. S. Islm Istitute of Nturl Scieces, Uited Itertiol Uiversity, Dhk-, gldesh Deprtmet of Mthemtics, Uiversity of Dhk, Dhk-,
A New Estimator Using Auxiliary Information in Stratified Adaptive Cluster Sampling
 Ope Jourl of ttitic, 03, 3, 78-8 ttp://d.doi.org/0.436/oj.03.3403 Publied Olie eptember 03 (ttp://www.cirp.org/jourl/oj) New Etimtor Uig uilir Iformtio i trtified dptive Cluter mplig Nippor Cutim *, Moc
Ope Jourl of ttitic, 03, 3, 78-8 ttp://d.doi.org/0.436/oj.03.3403 Publied Olie eptember 03 (ttp://www.cirp.org/jourl/oj) New Etimtor Uig uilir Iformtio i trtified dptive Cluter mplig Nippor Cutim *, Moc
( ) dx ; f ( x ) is height and Δx is
 dx ; f ( x ) is height and Δx is") Mth : 6.3 Defiite Itegrls from Riem Sums We just sw tht the exct re ouded y cotiuous fuctio f d the x xis o the itervl x, ws give s A = lim A exct RAM, where is the umer of rectgles i the Rectgulr Approximtio
Mth : 6.3 Defiite Itegrls from Riem Sums We just sw tht the exct re ouded y cotiuous fuctio f d the x xis o the itervl x, ws give s A = lim A exct RAM, where is the umer of rectgles i the Rectgulr Approximtio
MAS221 Analysis, Semester 2 Exercises
 MAS22 Alysis, Semester 2 Exercises Srh Whitehouse (Exercises lbelled * my be more demdig.) Chpter Problems: Revisio Questio () Stte the defiitio of covergece of sequece of rel umbers, ( ), to limit. (b)
MAS22 Alysis, Semester 2 Exercises Srh Whitehouse (Exercises lbelled * my be more demdig.) Chpter Problems: Revisio Questio () Stte the defiitio of covergece of sequece of rel umbers, ( ), to limit. (b)
GRAPHING LINEAR EQUATIONS. Linear Equations. x l ( 3,1 ) _x-axis. Origin ( 0, 0 ) Slope = change in y change in x. Equation for l 1.
 _x-axis. Origin ( 0, 0 ) Slope = change in y change in x. Equation for l 1.") GRAPHING LINEAR EQUATIONS Qudrt II Qudrt I ORDERED PAIR: The first umer i the ordered pir is the -coordite d the secod umer i the ordered pir is the y-coordite. (, ) Origi ( 0, 0 ) _-is Lier Equtios Qudrt
GRAPHING LINEAR EQUATIONS Qudrt II Qudrt I ORDERED PAIR: The first umer i the ordered pir is the -coordite d the secod umer i the ordered pir is the y-coordite. (, ) Origi ( 0, 0 ) _-is Lier Equtios Qudrt
UNIVERSITY OF BRISTOL. Examination for the Degrees of B.Sc. and M.Sci. (Level C/4) ANALYSIS 1B, SOLUTIONS MATH (Paper Code MATH-10006)
 ANALYSIS 1B, SOLUTIONS MATH (Paper Code MATH-10006)") UNIVERSITY OF BRISTOL Exmitio for the Degrees of B.Sc. d M.Sci. (Level C/4) ANALYSIS B, SOLUTIONS MATH 6 (Pper Code MATH-6) My/Jue 25, hours 3 miutes This pper cotis two sectios, A d B. Plese use seprte
UNIVERSITY OF BRISTOL Exmitio for the Degrees of B.Sc. d M.Sci. (Level C/4) ANALYSIS B, SOLUTIONS MATH 6 (Pper Code MATH-6) My/Jue 25, hours 3 miutes This pper cotis two sectios, A d B. Plese use seprte
REVISION SHEET FP1 (AQA) ALGEBRA. E.g., if 2x
 ALGEBRA. E.g., if 2x") The mi ides re: The reltioships betwee roots d coefficiets i polyomil (qudrtic) equtios Fidig polyomil equtios with roots relted to tht of give oe the Further Mthemtics etwork wwwfmetworkorguk V 7 REVISION
The mi ides re: The reltioships betwee roots d coefficiets i polyomil (qudrtic) equtios Fidig polyomil equtios with roots relted to tht of give oe the Further Mthemtics etwork wwwfmetworkorguk V 7 REVISION
ELEG 5173L Digital Signal Processing Ch. 2 The Z-Transform
 Deprtmet of Electricl Egieerig Uiversity of Arkss ELEG 573L Digitl Sigl Processig Ch. The Z-Trsform Dr. Jigxi Wu wuj@urk.edu OUTLINE The Z-Trsform Properties Iverse Z-Trsform Z-Trsform of LTI system Z-TRANSFORM
Deprtmet of Electricl Egieerig Uiversity of Arkss ELEG 573L Digitl Sigl Processig Ch. The Z-Trsform Dr. Jigxi Wu wuj@urk.edu OUTLINE The Z-Trsform Properties Iverse Z-Trsform Z-Trsform of LTI system Z-TRANSFORM
Limit of a function:
 - Limit of fuctio: We sy tht f ( ) eists d is equl with (rel) umer L if f( ) gets s close s we wt to L if is close eough to (This defiitio c e geerlized for L y syig tht f( ) ecomes s lrge (or s lrge egtive
- Limit of fuctio: We sy tht f ( ) eists d is equl with (rel) umer L if f( ) gets s close s we wt to L if is close eough to (This defiitio c e geerlized for L y syig tht f( ) ecomes s lrge (or s lrge egtive
DIGITAL SIGNAL PROCESSING LECTURE 5
 DIGITAL SIGNAL PROCESSING LECTURE 5 Fll K8-5 th Semester Thir Muhmmd tmuhmmd_7@yhoo.com Cotet d Figures re from Discrete-Time Sigl Processig, e by Oppeheim, Shfer, d Buck, 999- Pretice Hll Ic. The -Trsform
DIGITAL SIGNAL PROCESSING LECTURE 5 Fll K8-5 th Semester Thir Muhmmd tmuhmmd_7@yhoo.com Cotet d Figures re from Discrete-Time Sigl Processig, e by Oppeheim, Shfer, d Buck, 999- Pretice Hll Ic. The -Trsform
Advanced Control Theory
 Advced Cotrol Theory Review of Cotrol Sytem chibum@eoultech.c.kr Outlie Simle feedbck cotrol Advced Cotrol Theory Feedbck Sytem U V Y m Motly H - r : the referece iut - y m : the outut of the ytem - e
Advced Cotrol Theory Review of Cotrol Sytem chibum@eoultech.c.kr Outlie Simle feedbck cotrol Advced Cotrol Theory Feedbck Sytem U V Y m Motly H - r : the referece iut - y m : the outut of the ytem - e
5.1 - Areas and Distances
 Mth 3B Midterm Review Writte by Victori Kl vtkl@mth.ucsb.edu SH 63u Office Hours: R 9:5 - :5m The midterm will cover the sectios for which you hve received homework d feedbck Sectios.9-6.5 i your book.
Mth 3B Midterm Review Writte by Victori Kl vtkl@mth.ucsb.edu SH 63u Office Hours: R 9:5 - :5m The midterm will cover the sectios for which you hve received homework d feedbck Sectios.9-6.5 i your book.
The Weierstrass Approximation Theorem
 The Weierstrss Approximtio Theorem Jmes K. Peterso Deprtmet of Biologicl Scieces d Deprtmet of Mthemticl Scieces Clemso Uiversity Februry 26, 2018 Outlie The Wierstrss Approximtio Theorem MtLb Implemettio
The Weierstrss Approximtio Theorem Jmes K. Peterso Deprtmet of Biologicl Scieces d Deprtmet of Mthemticl Scieces Clemso Uiversity Februry 26, 2018 Outlie The Wierstrss Approximtio Theorem MtLb Implemettio
y udv uv y v du 7.1 INTEGRATION BY PARTS
 7. INTEGRATION BY PARTS Ever differetitio rule hs correspodig itegrtio rule. For istce, the Substitutio Rule for itegrtio correspods to the Chi Rule for differetitio. The rule tht correspods to the Product
7. INTEGRATION BY PARTS Ever differetitio rule hs correspodig itegrtio rule. For istce, the Substitutio Rule for itegrtio correspods to the Chi Rule for differetitio. The rule tht correspods to the Product