Narrow-band Receiver Radio Architectures
|
|
|
- Hope Potter
- 5 years ago
- Views:
Transcription
1 Now-bnd Receive Rdio chiecues
2 l l l l l Double-convesion single-qud Supeheodyne Diec-convesion Single-convesion singlequd, hoodyne, Zeo- Double-convesion double-qud Low- Refeences
3 Down-convesion; The ige poble: Desied signl LN ~ Blocke ige 3 Blocke level cn be odes of gniude lge hn desied signl f no blocke pesen, you sill fold he ige noise ~3dB SNR hi Feq Feq cos cos cos cos fe he lowpss file following ixe, he oupu is: oupu cos cos cos cos cos

4 The Supeheodyne chiecue: 4 OFF chip ge file file Pssive BPF LN The choice of he fequency: Relively low equies vey high-q ige file o povide decen ejecion he ige fequency, which nsles ino highe file pssbnd loss nd so highe Rx NF, nd highe cos. Relively high esuls in oe cuen consupion fo he subsequen sge cicuis, especilly he VG. ypicl fequency is 00-00MHz. One of he os obus nd low-cuen eceive chiecues equies sevel bulky off-chip coponens ~ ge file eoves boh blocke nd noise fo ige befoe downconvesion
5 plnning in Supehe chiecue: 5 OFF chip ge file file VG PLL ~ VCO Pssive BPF LN Q PLL ~ VCO Two sepe VCO s nd synhesizes e usully needed. The is usully fixed, while he is vible o down conve he desied signl o fll wihin he SW file bndwidh. The soluion is 3-4 chip soluion wih hee exenl SW files. should neve be de close o be n inege uliple of fo ny chnnel. The N h honic of he fixed could lek ino ixe cusing unwned ineod. blocke f n leks o ixe n
6 The ½ poble in supehe chiecue: blocke Supehe Rx 6 0 ½ Le us ssue hee is n undesied blocke hlf wy beween he desied signl nd he, s shown. Thee e wo echnis his blocke cn fold ono he desied bnd. The fis if he fon-end hs song second ode non-lineiy. ½ cos 0.5 cos blocke blocke blocke f he hs lso lge second ode coponen, he esul would be coponen of he blocke folding ono he bnd, igh on op of he desied bnd cos cos cos... blocke blocke Noe h he blocke folds wih wice is signl bndwidh due o he sque.
7 7 0 0 ½ ½ The second ens by which he blocke cn fold ono he desied bnd if he sge hs song second ode nonlineiy. cos0.5 cos bloc ke blocke blocke Noe gin hee h he blocke folds wih wice is signl bndwidh due o he sque. is heefoe n exeely ipon decision o chose he fequency so h hee is no song hlf blocke nywhee in he syse, o if hee is ny, he desied second ode nonlineiy of he eceive is cefully clculed.
8 Supehe; Dul convesion single-qud: 8 OFF chip ge file file VG ~ Pssive BPF LN Q Disdvnges: ~ equies sevel bulky off-chip SW files. genelly wo diffeen synhesizes e equied hee-chip soluion:, nd synhesize dvnges: obus. high-dynic nge SW files elxes h of he cive cicuis, dsiclly educing hei equied dynic nge.. Esie o design low cuen consupion <0 fo WCDM
9 9
10 0 ge suppession by pope phsing Hilbe chiecue: Pssive BPF LN 90 ~ 90 Σ B C C C C B cos cos cos cos cos cos sin sin sin sin sin cos cos cos cos cos cos cos ' file
11 Hilbe chiecue: Disdvnges: equies exeely good phse nd gin ching. Only ~35dB of ige ejecion is possible wihou iing o uning. This is no enough in soe pplicions whee he ige is 60dB highe hn he desied signl. consues oe cuen.. bi powe hungy dvnges: eliines he exenl ige SW file. offes bee inegion, bu sill second chip is needed fo finl down convesion 45 Pssive BPF LN ~ Σ D file odified bee cking chiecue B 35 C



12 pc of gin nd phse iblnce on ige ejecion Le us ssue h signls nd Q expeience non-idenicl gin. Fuheoe, he phse is no excly qudue nd hs soe phse eo. To find he ipc of boh gin nd phse iblnce on ige ejecion, le us e-wie he equions s follows:

13 ge ejecion equion The ige ejecion in db cn hen be wien s: is in d Fo sll : 3 Fo sll nd, he RR cn be ppoxied o: degees 0log db
14 Double convesion double qud chiecue: C 4 ige Pssive BPF Pssive BPF LN B + ige + signl Fis D F E + Σ - + Σ + Q ~ N second The dul convesion double qud chiecue hs he dvnge of de-sensiizing he eceive o gin nd phse iblnce of nd Q phs. Mke sue nd vlues e chosen so ige fo fis down-convesion flls ou of bnd ejeced by exenl SW pssive BP file.
15 5 E D Q F C B F B E D C B sin cos cos cos sin Lowpss sin sin cos Lowpss sin sin sin Lowpss cos cos cos Lowpss sin sin sin Lowpss cos cos cos Lowpss cos cos The bove nlysis ssues idel qudue geneion. Bu wh if hee e soe phse eos?
16 6 E D Q F C B F B E D C B sin cos cos cos sin Lowpss sin sin cos Lowpss sin sin sin Lowpss cos cos cos Lowpss sin sin sin Lowpss cos cos cos Lowpss cos cos gin eo nlysis: s seen he gin isch eo ges educed due o he poduc of wo sll vlues. ypicl gin eo of such chiecue cn be s good s 0.dB -sig.5ghz.
17 Phse eo nlysis: cos Lowpss cos B Lowpss sin C Lowpsscos D Lowpsssin E LowpssB cos F LowpssB sin cos cos cos sin sin cos cos sin sin sin sin cos cos Cn you deive he finl esul? Hoewok!!! 7
18 The diec convesion Zeo- chiecue: Why no eliine he copleely nd ix he signl wih n he exc se fequency s he desied signl? 8 in Pssive BPF LN 90 ~ Q in LPF fo Q LPF cos cos 0.5 cos in 0 sin 0.5 sin in No ige nyoe wih pefec /Q ching! Wh if hee is /Q isch in diec-convesion? Cn hee sill be n ige?
19 pc of /Q isch in diec-convesion chiecue: in LPF fo cos Q LPF in cos, nd finie /Q gin nd phse isch of nd, especively in sin coscos sinsin sincos cossin /Q coss lk ge fo se desied signl coposed of Q signl leking ino nd signl leking ino Q /Q coss lk. This esuls in degdion of SNR. Since he ige coes fo he signl iself, he ige ejecion equieen is llevied se by ge SNR of he eceive 9 -f f 0 fe ixe feq Negive feq ige lis
20 Pobles wih Zeo- convesion: 0. self ixing: Pssive BPF LN 90 ~ Vies wih nenn VSWR B Q p cos p p cos Dynic DC offse self ixing degdes DC-offse in diec-convesion eceive. Sic one cn be clibed ou bu dynic one ie vying cn be poble
21 . DC offse: 60dB gin Pssive BPF LN 90 ~ Q V DC offse V DC offse Since he signl is conveed down o DC, he signl ph pos ixe is DC coupled. This kes sligh DC offse o ppe s vols nd os likely o sue he subsequen bsebnd cicuiy. C coupling is expensive since lge C coupling cps should be used o chieve low highpss cone <khz. lso ny offse nsiens due o gin swiching will esul in lge DC nsien h will ke long ie few s fo khz cone o sele. Two coon echniques fo DC offse eovl: nlog sevo loops B digil DCoffse clibions
22 3. Sensiiviy o second ode disoion P: Le us ssue wo jes seped by Δf s s s s cos cos cos cos cos cos cos cn be seen hn he second ode disoion in he eceive esuls in wo low fequency disoion h folds ino he desied signl fe being downconveed ound DC:. The bsebnd odulion ound he je cie ges folded ino bsebnd wih wice bndwidh. The wo jes be gins ech ohe nd poduce coponen only Δf wy fo DC. f Δf is close enough, he M disoion will fll ino he desied signl bnd. Even if Δf does no fll wihin he desied signl bnd, i cn be close enough o clip he enie eceive if i does no ge fileed ou popely befoe i eches he VG. Noe h s cn be siple CW je in soe syses
23 4. Sensiiviy o /f flicke noise noise densiy 00ni /f, slope 0dB/dec 3 Since he down conveed signl is ceneed ound DC low fequency, he device /f noise becoes ipon. Fo exple, if he /f noise cone of GSM eceive is hlf he desied signl bndwidh s shown bove, he degdion his could cuse o he effecive noise is ssuing noise inegion sing khz: n ve n ve 00k 00kHz khz df f 00kHz 00kHz 00k ln b 00k k ni bdf ; khz whee k 00n 00k 00k 00k.5 00kb 6.5n 00kHz i ; b n This is vey chllenging sk in CMOS design given he elively lge /f noise cone coped o bipol. Theefoe, device sizing is necessy o bing he device /f noise cone o n ccepble level <0.5dB noise ipc. i i 00kHz feq

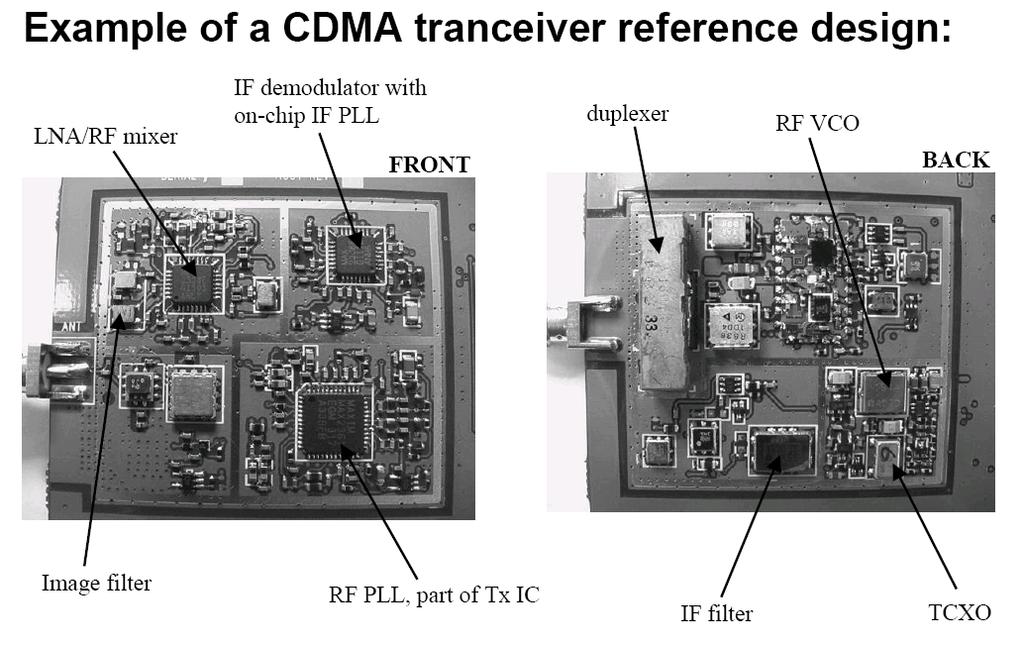
24 Diec-convesion eceive efeence design 4 dvnges: high inegion ge plfo fo uli- bnd eceive low powe no s good s supehe! Vey popul chiecue fo oden syses such s WiFi, 3G WCDM/UMTS, 4G LTE nd 5G
25 ge ejec files Low- chiecue: Blocke ige Pssive BPF LN 90 ~ Q 5 Why no void signl ound DC by choosing n fequency h is low enough so files nd cicuiy cn be ineged on chip, ye high enough o void he pobles ound DC. ypicl low fequency is one o wice he signl bndwidh. he single qud chiecue bove sill suffes sensiiviy of ige ejecion o phse nd gin isch. ypicl 35dB ige ejecion is no enough fo os syses o be ble o hndle lge ige signl wih finie dynic nge ineged cicuiy. Need RR clibions he ige ejec files pefo boh chnnel selecion nd ige ejecion he se ie. The design of such files will be discussed in subsequen lecues. Popul chiecue fo syses wih now-bnd signls h hs lge enegy conen close o DC such s Blueooh, GPS, nd GSM
26 The double qud low- chiecue: 6 Pssive BPF LN B D + Σ - + Σ + Q Cn be finie o zeo second C ~ poved ige ejecion due o desensiizion o qudue gin nd phse eo.
27 7 D C B Q q q q sin cos cos cos cos cos sin sin sin sin sin cos sin sin sin sin sin cos cos cos cos cos sin sin cos cos Signl ph nlysis: Se nlysis s befoe!
28 Refeences: [].. bidi, Rdio Fequency neged Cicuis fo Poble Counicions, Poc. CCC, Sn Diego, pp 5-58, My 994. [].. bidi, Diec Convesion Rdio Tnsceives fo Digil Counicions, Poc. SSCC, pp 86-87, Feb 995. [3] J. Clos, M. Seye Single-Chip 900MHz CMOS Receive Fon-end wih High Pefonce Low- Topology, EEE JSSC, Vol. 30, no., pp , Dec [4] B. Rzvi, Micoeleconics, Penice Hll P [5] J. Clos, M. Seye, CMOS Wieless Tnsceive Design, Kluwe cdeic Publishes [6] Pcicl Syse Design, Willi F. Egn, SBN: , Hdcove 46 pges, pil 003, Wiley-EEE Pess. 8
() t. () t r () t or v. ( t) () () ( ) = ( ) or ( ) () () () t or dv () () Section 10.4 Motion in Space: Velocity and Acceleration
 t. () t r () t or v. ( t) () () ( ) = ( ) or ( ) () () () t or dv () () Section 10.4 Motion in Space: Velocity and Acceleration") Secion 1.4 Moion in Spce: Velociy nd Acceleion We e going o dive lile deepe ino somehing we ve ledy inoduced, nmely () nd (). Discuss wih you neighbo he elionships beween posiion, velociy nd cceleion you
Secion 1.4 Moion in Spce: Velociy nd Acceleion We e going o dive lile deepe ino somehing we ve ledy inoduced, nmely () nd (). Discuss wih you neighbo he elionships beween posiion, velociy nd cceleion you
Circuits 24/08/2010. Question. Question. Practice Questions QV CV. Review Formula s RC R R R V IR ... Charging P IV I R ... E Pt.
 4/08/00 eview Fomul s icuis cice s BL B A B I I I I E...... s n n hging Q Q 0 e... n... Q Q n 0 e Q I I0e Dischging Q U Q A wie mde of bss nd nohe wie mde of silve hve he sme lengh, bu he dimee of he bss
4/08/00 eview Fomul s icuis cice s BL B A B I I I I E...... s n n hging Q Q 0 e... n... Q Q n 0 e Q I I0e Dischging Q U Q A wie mde of bss nd nohe wie mde of silve hve he sme lengh, bu he dimee of he bss
USING LOWER CLASS WEIGHTS TO CORRECT AND CHECK THE NONLINEARITY OF BALANCES
 USING OWER CSS WEIGHTS TO CORRECT ND CHECK THE NONINERITY OF BNCES Tiohy Chnglin Wng, Qiho Yun, hu Reichuh Mele-Toledo Insuens Shnghi Co. d, Shnghi, P R Chin Mele-Toledo GH, Geifensee, Swizelnd BSTRCT
USING OWER CSS WEIGHTS TO CORRECT ND CHECK THE NONINERITY OF BNCES Tiohy Chnglin Wng, Qiho Yun, hu Reichuh Mele-Toledo Insuens Shnghi Co. d, Shnghi, P R Chin Mele-Toledo GH, Geifensee, Swizelnd BSTRCT
f(x) dx with An integral having either an infinite limit of integration or an unbounded integrand is called improper. Here are two examples dx x x 2
 dx with An integral having either an infinite limit of integration or an unbounded integrand is called improper. Here are two examples dx x x 2") Impope Inegls To his poin we hve only consideed inegls f() wih he is of inegion nd b finie nd he inegnd f() bounded (nd in fc coninuous ecep possibly fo finiely mny jump disconinuiies) An inegl hving eihe
Impope Inegls To his poin we hve only consideed inegls f() wih he is of inegion nd b finie nd he inegnd f() bounded (nd in fc coninuous ecep possibly fo finiely mny jump disconinuiies) An inegl hving eihe
PHYSICS 102. Intro PHYSICS-ELECTROMAGNETISM
 PHYS 0 Suen Nme: Suen Numbe: FAUTY OF SIENE Viul Miem EXAMINATION PHYSIS 0 Ino PHYSIS-EETROMAGNETISM Emines: D. Yoichi Miyh INSTRUTIONS: Aemp ll 4 quesions. All quesions hve equl weighs 0 poins ech. Answes
PHYS 0 Suen Nme: Suen Numbe: FAUTY OF SIENE Viul Miem EXAMINATION PHYSIS 0 Ino PHYSIS-EETROMAGNETISM Emines: D. Yoichi Miyh INSTRUTIONS: Aemp ll 4 quesions. All quesions hve equl weighs 0 poins ech. Answes
Reinforcement learning
 CS 75 Mchine Lening Lecue b einfocemen lening Milos Huskech milos@cs.pi.edu 539 Senno Sque einfocemen lening We wn o len conol policy: : X A We see emples of bu oupus e no given Insed of we ge feedbck
CS 75 Mchine Lening Lecue b einfocemen lening Milos Huskech milos@cs.pi.edu 539 Senno Sque einfocemen lening We wn o len conol policy: : X A We see emples of bu oupus e no given Insed of we ge feedbck
Technical Vibration - text 2 - forced vibration, rotational vibration
 Technicl Viion - e - foced viion, oionl viion 4. oced viion, viion unde he consn eenl foce The viion unde he eenl foce. eenl The quesion is if he eenl foce e is consn o vying. If vying, wh is he foce funcion.
Technicl Viion - e - foced viion, oionl viion 4. oced viion, viion unde he consn eenl foce The viion unde he eenl foce. eenl The quesion is if he eenl foce e is consn o vying. If vying, wh is he foce funcion.
S Radio transmission and network access Exercise 1-2
 S-7.330 Rdio rnsmission nd nework ccess Exercise 1 - P1 In four-symbol digil sysem wih eqully probble symbols he pulses in he figure re used in rnsmission over AWGN-chnnel. s () s () s () s () 1 3 4 )
S-7.330 Rdio rnsmission nd nework ccess Exercise 1 - P1 In four-symbol digil sysem wih eqully probble symbols he pulses in he figure re used in rnsmission over AWGN-chnnel. s () s () s () s () 1 3 4 )
P441 Analytical Mechanics - I. Coupled Oscillators. c Alex R. Dzierba
 Lecure 3 Mondy - Deceber 5, 005 Wrien or ls upded: Deceber 3, 005 P44 Anlyicl Mechnics - I oupled Oscillors c Alex R. Dzierb oupled oscillors - rix echnique In Figure we show n exple of wo coupled oscillors,
Lecure 3 Mondy - Deceber 5, 005 Wrien or ls upded: Deceber 3, 005 P44 Anlyicl Mechnics - I oupled Oscillors c Alex R. Dzierb oupled oscillors - rix echnique In Figure we show n exple of wo coupled oscillors,
Ans: In the rectangular loop with the assigned direction for i2: di L dt , (1) where (2) a) At t = 0, i1(t) = I1U(t) is applied and (1) becomes
 where (2) a) At t = 0, i1(t) = I1U(t) is applied and (1) becomes") omewok # P7-3 ecngul loop of widh w nd heigh h is siued ne ve long wie cing cuen i s in Fig 7- ssume i o e ecngul pulse s shown in Fig 7- Find he induced cuen i in he ecngul loop whose self-inducnce is
omewok # P7-3 ecngul loop of widh w nd heigh h is siued ne ve long wie cing cuen i s in Fig 7- ssume i o e ecngul pulse s shown in Fig 7- Find he induced cuen i in he ecngul loop whose self-inducnce is
ÖRNEK 1: THE LINEAR IMPULSE-MOMENTUM RELATION Calculate the linear momentum of a particle of mass m=10 kg which has a. kg m s
 MÜHENDİSLİK MEKANİĞİ. HAFTA İMPULS- MMENTUM-ÇARPIŞMA Linea oenu of a paicle: The sybol L denoes he linea oenu and is defined as he ass ies he elociy of a paicle. L ÖRNEK : THE LINEAR IMPULSE-MMENTUM RELATIN
MÜHENDİSLİK MEKANİĞİ. HAFTA İMPULS- MMENTUM-ÇARPIŞMA Linea oenu of a paicle: The sybol L denoes he linea oenu and is defined as he ass ies he elociy of a paicle. L ÖRNEK : THE LINEAR IMPULSE-MMENTUM RELATIN
Circular Motion. Radians. One revolution is equivalent to which is also equivalent to 2π radians. Therefore we can.
 1 Cicula Moion Radians One evoluion is equivalen o 360 0 which is also equivalen o 2π adians. Theefoe we can say ha 360 = 2π adians, 180 = π adians, 90 = π 2 adians. Hence 1 adian = 360 2π Convesions Rule
1 Cicula Moion Radians One evoluion is equivalen o 360 0 which is also equivalen o 2π adians. Theefoe we can say ha 360 = 2π adians, 180 = π adians, 90 = π 2 adians. Hence 1 adian = 360 2π Convesions Rule
Physics 201, Lecture 5
 Phsics 1 Lecue 5 Tod s Topics n Moion in D (Chp 4.1-4.3): n D Kinemicl Quniies (sec. 4.1) n D Kinemics wih Consn Acceleion (sec. 4.) n D Pojecile (Sec 4.3) n Epeced fom Peiew: n Displcemen eloci cceleion
Phsics 1 Lecue 5 Tod s Topics n Moion in D (Chp 4.1-4.3): n D Kinemicl Quniies (sec. 4.1) n D Kinemics wih Consn Acceleion (sec. 4.) n D Pojecile (Sec 4.3) n Epeced fom Peiew: n Displcemen eloci cceleion
4.8 Improper Integrals
 4.8 Improper Inegrls Well you ve mde i hrough ll he inegrion echniques. Congrs! Unforunely for us, we sill need o cover one more inegrl. They re clled Improper Inegrls. A his poin, we ve only del wih inegrls
4.8 Improper Inegrls Well you ve mde i hrough ll he inegrion echniques. Congrs! Unforunely for us, we sill need o cover one more inegrl. They re clled Improper Inegrls. A his poin, we ve only del wih inegrls
COMP 465: Data Mining More on PageRank
 COMP 465: Dt Mnng Moe on PgeRnk Sldes Adpted Fo: www.ds.og (Mnng Mssve Dtsets) Powe Iteton: Set = 1/ 1: = 2: = Goto 1 Exple: d 1/3 1/3 5/12 9/24 6/15 = 1/3 3/6 1/3 11/24 6/15 1/3 1/6 3/12 1/6 3/15 Iteton
COMP 465: Dt Mnng Moe on PgeRnk Sldes Adpted Fo: www.ds.og (Mnng Mssve Dtsets) Powe Iteton: Set = 1/ 1: = 2: = Goto 1 Exple: d 1/3 1/3 5/12 9/24 6/15 = 1/3 3/6 1/3 11/24 6/15 1/3 1/6 3/12 1/6 3/15 Iteton
e t dt e t dt = lim e t dt T (1 e T ) = 1
 = 1") Improper Inegrls There re wo ypes of improper inegrls - hose wih infinie limis of inegrion, nd hose wih inegrnds h pproch some poin wihin he limis of inegrion. Firs we will consider inegrls wih infinie
Improper Inegrls There re wo ypes of improper inegrls - hose wih infinie limis of inegrion, nd hose wih inegrnds h pproch some poin wihin he limis of inegrion. Firs we will consider inegrls wih infinie
, on the power of the transmitter P t fed to it, and on the distance R between the antenna and the observation point as. r r t
 Lecue 6: Fiis Tansmission Equaion and Rada Range Equaion (Fiis equaion. Maximum ange of a wieless link. Rada coss secion. Rada equaion. Maximum ange of a ada. 1. Fiis ansmission equaion Fiis ansmission
Lecue 6: Fiis Tansmission Equaion and Rada Range Equaion (Fiis equaion. Maximum ange of a wieless link. Rada coss secion. Rada equaion. Maximum ange of a ada. 1. Fiis ansmission equaion Fiis ansmission
Some algorthim for solving system of linear volterra integral equation of second kind by using MATLAB 7 ALAN JALAL ABD ALKADER
 . Soe lgoi o solving syse o line vole inegl eqion o second ind by sing MATLAB 7 ALAN JALAL ABD ALKADER College o Edcion / Al- Msnsiiy Univesiy Depen o Meics تقديم البحث :-//7 قبول النشر:- //. Absc ( /
. Soe lgoi o solving syse o line vole inegl eqion o second ind by sing MATLAB 7 ALAN JALAL ABD ALKADER College o Edcion / Al- Msnsiiy Univesiy Depen o Meics تقديم البحث :-//7 قبول النشر:- //. Absc ( /
Week 8. Topic 2 Properties of Logarithms
 Week 8 Topic 2 Popeties of Logithms 1 Week 8 Topic 2 Popeties of Logithms Intoduction Since the esult of ithm is n eponent, we hve mny popeties of ithms tht e elted to the popeties of eponents. They e
Week 8 Topic 2 Popeties of Logithms 1 Week 8 Topic 2 Popeties of Logithms Intoduction Since the esult of ithm is n eponent, we hve mny popeties of ithms tht e elted to the popeties of eponents. They e
r r r r r EE334 Electromagnetic Theory I Todd Kaiser
 334 lecoagneic Theoy I Todd Kaise Maxwell s quaions: Maxwell s equaions wee developed on expeienal evidence and have been found o goven all classical elecoagneic phenoena. They can be wien in diffeenial
334 lecoagneic Theoy I Todd Kaise Maxwell s quaions: Maxwell s equaions wee developed on expeienal evidence and have been found o goven all classical elecoagneic phenoena. They can be wien in diffeenial
Forms of Energy. Mass = Energy. Page 1. SPH4U: Introduction to Work. Work & Energy. Particle Physics:
 SPH4U: Inroducion o ork ork & Energy ork & Energy Discussion Definiion Do Produc ork of consn force ork/kineic energy heore ork of uliple consn forces Coens One of he os iporn conceps in physics Alernive
SPH4U: Inroducion o ork ork & Energy ork & Energy Discussion Definiion Do Produc ork of consn force ork/kineic energy heore ork of uliple consn forces Coens One of he os iporn conceps in physics Alernive
Faraday s Law. To be able to find. motional emf transformer and motional emf. Motional emf
 Objecie F s w Tnsfome Moionl To be ble o fin nsfome. moionl nsfome n moionl. 331 1 331 Mwell s quion: ic Fiel D: Guss lw :KV : Guss lw H: Ampee s w Poin Fom Inegl Fom D D Q sufce loop H sufce H I enclose
Objecie F s w Tnsfome Moionl To be ble o fin nsfome. moionl nsfome n moionl. 331 1 331 Mwell s quion: ic Fiel D: Guss lw :KV : Guss lw H: Ampee s w Poin Fom Inegl Fom D D Q sufce loop H sufce H I enclose
Homework 5 for BST 631: Statistical Theory I Solutions, 09/21/2006
 Homewok 5 fo BST 63: Sisicl Theoy I Soluions, 9//6 Due Time: 5:PM Thusy, on 9/8/6. Polem ( oins). Book olem.8. Soluion: E = x f ( x) = ( x) f ( x) + ( x ) f ( x) = xf ( x) + xf ( x) + f ( x) f ( x) Accoing
Homewok 5 fo BST 63: Sisicl Theoy I Soluions, 9//6 Due Time: 5:PM Thusy, on 9/8/6. Polem ( oins). Book olem.8. Soluion: E = x f ( x) = ( x) f ( x) + ( x ) f ( x) = xf ( x) + xf ( x) + f ( x) f ( x) Accoing
Science Advertisement Intergovernmental Panel on Climate Change: The Physical Science Basis 2/3/2007 Physics 253
 Science Adeisemen Inegoenmenl Pnel on Clime Chnge: The Phsicl Science Bsis hp://www.ipcc.ch/spmfeb7.pdf /3/7 Phsics 53 hp://www.fonews.com/pojecs/pdf/spmfeb7.pdf /3/7 Phsics 53 3 Sus: Uni, Chpe 3 Vecos
Science Adeisemen Inegoenmenl Pnel on Clime Chnge: The Phsicl Science Bsis hp://www.ipcc.ch/spmfeb7.pdf /3/7 Phsics 53 hp://www.fonews.com/pojecs/pdf/spmfeb7.pdf /3/7 Phsics 53 3 Sus: Uni, Chpe 3 Vecos
Lecture 18: Kinetics of Phase Growth in a Two-component System: general kinetics analysis based on the dilute-solution approximation
 Lecue 8: Kineics of Phase Gowh in a Two-componen Sysem: geneal kineics analysis based on he dilue-soluion appoximaion Today s opics: In he las Lecues, we leaned hee diffeen ways o descibe he diffusion
Lecue 8: Kineics of Phase Gowh in a Two-componen Sysem: geneal kineics analysis based on he dilue-soluion appoximaion Today s opics: In he las Lecues, we leaned hee diffeen ways o descibe he diffusion
Fig. 1S. The antenna construction: (a) main geometrical parameters, (b) the wire support pillar and (c) the console link between wire and coaxial
 main geometrical parameters, (b) the wire support pillar and (c) the console link between wire and coaxial") a b c Fig. S. The anenna consucion: (a) ain geoeical paaees, (b) he wie suppo pilla and (c) he console link beween wie and coaial pobe. Fig. S. The anenna coss-secion in he y-z plane. Accoding o [], he
a b c Fig. S. The anenna consucion: (a) ain geoeical paaees, (b) he wie suppo pilla and (c) he console link beween wie and coaial pobe. Fig. S. The anenna coss-secion in he y-z plane. Accoding o [], he
Low-complexity Algorithms for MIMO Multiplexing Systems
 Low-complexiy Algoihms fo MIMO Muliplexing Sysems Ouline Inoducion QRD-M M algoihm Algoihm I: : o educe he numbe of suviving pahs. Algoihm II: : o educe he numbe of candidaes fo each ansmied signal. :
Low-complexiy Algoihms fo MIMO Muliplexing Sysems Ouline Inoducion QRD-M M algoihm Algoihm I: : o educe he numbe of suviving pahs. Algoihm II: : o educe he numbe of candidaes fo each ansmied signal. :
Computer Propagation Analysis Tools
 Compue Popagaion Analysis Tools. Compue Popagaion Analysis Tools Inoducion By now you ae pobably geing he idea ha pedicing eceived signal sengh is a eally impoan as in he design of a wieless communicaion
Compue Popagaion Analysis Tools. Compue Popagaion Analysis Tools Inoducion By now you ae pobably geing he idea ha pedicing eceived signal sengh is a eally impoan as in he design of a wieless communicaion
D zone schemes
 Ch. 5. Enegy Bnds in Cysls 5.. -D zone schemes Fee elecons E k m h Fee elecons in cysl sinα P + cosα cosk α cos α cos k cos( k + π n α k + πn mv ob P 0 h cos α cos k n α k + π m h k E Enegy is peiodic
Ch. 5. Enegy Bnds in Cysls 5.. -D zone schemes Fee elecons E k m h Fee elecons in cysl sinα P + cosα cosk α cos α cos k cos( k + π n α k + πn mv ob P 0 h cos α cos k n α k + π m h k E Enegy is peiodic
ENGI 4430 Advanced Calculus for Engineering Faculty of Engineering and Applied Science Problem Set 9 Solutions [Theorems of Gauss and Stokes]
![ENGI 4430 Advanced Calculus for Engineering Faculty of Engineering and Applied Science Problem Set 9 Solutions [Theorems of Gauss and Stokes]](/thumbs/91/106162145.jpg "ENGI 4430 Advanced Calculus for Engineering Faculty of Engineering and Applied Science Problem Set 9 Solutions [Theorems of Gauss and Stokes]") ENGI 44 Avance alculus fo Engineeing Faculy of Engineeing an Applie cience Poblem e 9 oluions [Theoems of Gauss an okes]. A fla aea A is boune by he iangle whose veices ae he poins P(,, ), Q(,, ) an R(,,
ENGI 44 Avance alculus fo Engineeing Faculy of Engineeing an Applie cience Poblem e 9 oluions [Theoems of Gauss an okes]. A fla aea A is boune by he iangle whose veices ae he poins P(,, ), Q(,, ) an R(,,
ME 141. Engineering Mechanics
 ME 141 Engineeing Mechnics Lecue 13: Kinemics of igid bodies hmd Shhedi Shkil Lecue, ep. of Mechnicl Engg, UET E-mil: sshkil@me.bue.c.bd, shkil6791@gmil.com Websie: eche.bue.c.bd/sshkil Couesy: Veco Mechnics
ME 141 Engineeing Mechnics Lecue 13: Kinemics of igid bodies hmd Shhedi Shkil Lecue, ep. of Mechnicl Engg, UET E-mil: sshkil@me.bue.c.bd, shkil6791@gmil.com Websie: eche.bue.c.bd/sshkil Couesy: Veco Mechnics
Lecture 22 Electromagnetic Waves
 Lecue Elecomagneic Waves Pogam: 1. Enegy caied by he wave (Poyning veco).. Maxwell s equaions and Bounday condiions a inefaces. 3. Maeials boundaies: eflecion and efacion. Snell s Law. Quesions you should
Lecue Elecomagneic Waves Pogam: 1. Enegy caied by he wave (Poyning veco).. Maxwell s equaions and Bounday condiions a inefaces. 3. Maeials boundaies: eflecion and efacion. Snell s Law. Quesions you should
Contraction Mapping Principle Approach to Differential Equations
 epl Journl of Science echnology 0 (009) 49-53 Conrcion pping Principle pproch o Differenil Equions Bishnu P. Dhungn Deprmen of hemics, hendr Rn Cmpus ribhuvn Universiy, Khmu epl bsrc Using n eension of
epl Journl of Science echnology 0 (009) 49-53 Conrcion pping Principle pproch o Differenil Equions Bishnu P. Dhungn Deprmen of hemics, hendr Rn Cmpus ribhuvn Universiy, Khmu epl bsrc Using n eension of
An Open cycle and Closed cycle Gas Turbine Engines. Methods to improve the performance of simple gas turbine plants
 An Open cycle and losed cycle Gas ubine Engines Mehods o impove he pefomance of simple gas ubine plans I egeneaive Gas ubine ycle: he empeaue of he exhaus gases in a simple gas ubine is highe han he empeaue
An Open cycle and losed cycle Gas ubine Engines Mehods o impove he pefomance of simple gas ubine plans I egeneaive Gas ubine ycle: he empeaue of he exhaus gases in a simple gas ubine is highe han he empeaue
Solvability of nonlinear Klein-Gordon equation by Laplace Decomposition Method
 Vol. 84 pp. 37-4 Jly 5 DOI:.5897/JMCSR4.57 icle Nbe: 63F95459 ISSN 6-973 Copyigh 5 hos ein he copyigh of his icle hp://www.cdeicjonls.og/jmcsr ficn Jonl of Mheics nd Cope Science Resech Fll Lengh Resech
Vol. 84 pp. 37-4 Jly 5 DOI:.5897/JMCSR4.57 icle Nbe: 63F95459 ISSN 6-973 Copyigh 5 hos ein he copyigh of his icle hp://www.cdeicjonls.og/jmcsr ficn Jonl of Mheics nd Cope Science Resech Fll Lengh Resech
Relative and Circular Motion
 Relaie and Cicula Moion a) Relaie moion b) Cenipeal acceleaion Mechanics Lecue 3 Slide 1 Mechanics Lecue 3 Slide 2 Time on Video Pelecue Looks like mosly eeyone hee has iewed enie pelecue GOOD! Thank you
Relaie and Cicula Moion a) Relaie moion b) Cenipeal acceleaion Mechanics Lecue 3 Slide 1 Mechanics Lecue 3 Slide 2 Time on Video Pelecue Looks like mosly eeyone hee has iewed enie pelecue GOOD! Thank you
Physics 2A HW #3 Solutions
 Chper 3 Focus on Conceps: 3, 4, 6, 9 Problems: 9, 9, 3, 41, 66, 7, 75, 77 Phsics A HW #3 Soluions Focus On Conceps 3-3 (c) The ccelerion due o grvi is he sme for boh blls, despie he fc h he hve differen
Chper 3 Focus on Conceps: 3, 4, 6, 9 Problems: 9, 9, 3, 41, 66, 7, 75, 77 Phsics A HW #3 Soluions Focus On Conceps 3-3 (c) The ccelerion due o grvi is he sme for boh blls, despie he fc h he hve differen
ANALYSIS OF KINEMATICS AND KINETOSTATICS OF FOUR-BAR LINKAGE MECHANISM BASED ON GIVEN PROGRAM
 SINTII POINGS IV INTNTIONL ONGSS "MINS. TNOLОGIS. MTILS." 7 - SUMM SSSION NLSIS O KINMTIS N KINTOSTTIS O OU- LINKG MNISM S ON GIVN POGM W ISSN - PINT ISSN - Pof.soc.. Shl Pof.soc.. Likj. * Pof.ss.. ji.
SINTII POINGS IV INTNTIONL ONGSS "MINS. TNOLОGIS. MTILS." 7 - SUMM SSSION NLSIS O KINMTIS N KINTOSTTIS O OU- LINKG MNISM S ON GIVN POGM W ISSN - PINT ISSN - Pof.soc.. Shl Pof.soc.. Likj. * Pof.ss.. ji.
September 20 Homework Solutions
 College of Engineering nd Compuer Science Mechnicl Engineering Deprmen Mechnicl Engineering A Seminr in Engineering Anlysis Fll 7 Number 66 Insrucor: Lrry Creo Sepember Homework Soluions Find he specrum
College of Engineering nd Compuer Science Mechnicl Engineering Deprmen Mechnicl Engineering A Seminr in Engineering Anlysis Fll 7 Number 66 Insrucor: Lrry Creo Sepember Homework Soluions Find he specrum
T-Match: Matching Techniques For Driving Yagi-Uda Antennas: T-Match. 2a s. Z in. (Sections 9.5 & 9.7 of Balanis)
") 3/0/018 _mch.doc Pge 1 of 6 T-Mch: Mching Techniques For Driving Ygi-Ud Anenns: T-Mch (Secions 9.5 & 9.7 of Blnis) l s l / l / in The T-Mch is shun-mching echnique h cn be used o feed he driven elemen
3/0/018 _mch.doc Pge 1 of 6 T-Mch: Mching Techniques For Driving Ygi-Ud Anenns: T-Mch (Secions 9.5 & 9.7 of Blnis) l s l / l / in The T-Mch is shun-mching echnique h cn be used o feed he driven elemen
Previously. Extensions to backstepping controller designs. Tracking using backstepping Suppose we consider the general system
 436-459 Advnced contol nd utomtion Extensions to bckstepping contolle designs Tcking Obseves (nonline dmping) Peviously Lst lectue we looked t designing nonline contolles using the bckstepping technique
436-459 Advnced contol nd utomtion Extensions to bckstepping contolle designs Tcking Obseves (nonline dmping) Peviously Lst lectue we looked t designing nonline contolles using the bckstepping technique
Ch.4 Motion in 2D. Ch.4 Motion in 2D
 Moion in plne, such s in he sceen, is clled 2-dimensionl (2D) moion. 1. Posiion, displcemen nd eloci ecos If he picle s posiion is ( 1, 1 ) 1, nd ( 2, 2 ) 2, he posiions ecos e 1 = 1 1 2 = 2 2 Aege eloci
Moion in plne, such s in he sceen, is clled 2-dimensionl (2D) moion. 1. Posiion, displcemen nd eloci ecos If he picle s posiion is ( 1, 1 ) 1, nd ( 2, 2 ) 2, he posiions ecos e 1 = 1 1 2 = 2 2 Aege eloci
General Non-Arbitrage Model. I. Partial Differential Equation for Pricing A. Traded Underlying Security
 1 Geneal Non-Abiage Model I. Paial Diffeenial Equaion fo Picing A. aded Undelying Secuiy 1. Dynamics of he Asse Given by: a. ds = µ (S, )d + σ (S, )dz b. he asse can be eihe a sock, o a cuency, an index,
1 Geneal Non-Abiage Model I. Paial Diffeenial Equaion fo Picing A. aded Undelying Secuiy 1. Dynamics of he Asse Given by: a. ds = µ (S, )d + σ (S, )dz b. he asse can be eihe a sock, o a cuency, an index,
SOME USEFUL MATHEMATICS
 SOME USEFU MAHEMAICS SOME USEFU MAHEMAICS I is esy o mesure n preic he behvior of n elecricl circui h conins only c volges n currens. However, mos useful elecricl signls h crry informion vry wih ime. Since
SOME USEFU MAHEMAICS SOME USEFU MAHEMAICS I is esy o mesure n preic he behvior of n elecricl circui h conins only c volges n currens. However, mos useful elecricl signls h crry informion vry wih ime. Since
Answers to test yourself questions
 Answes to test youself questions opic Descibing fields Gm Gm Gm Gm he net field t is: g ( d / ) ( 4d / ) d d Gm Gm Gm Gm Gm Gm b he net potentil t is: V d / 4d / d 4d d d V e 4 7 9 49 J kg 7 7 Gm d b E
Answes to test youself questions opic Descibing fields Gm Gm Gm Gm he net field t is: g ( d / ) ( 4d / ) d d Gm Gm Gm Gm Gm Gm b he net potentil t is: V d / 4d / d 4d d d V e 4 7 9 49 J kg 7 7 Gm d b E
4/3/2017. PHY 712 Electrodynamics 9-9:50 AM MWF Olin 103
 PHY 7 Eleodnais 9-9:50 AM MWF Olin 0 Plan fo Leue 0: Coninue eading Chap Snhoon adiaion adiaion fo eleon snhoon deies adiaion fo asonoial objes in iula obis 0/05/07 PHY 7 Sping 07 -- Leue 0 0/05/07 PHY
PHY 7 Eleodnais 9-9:50 AM MWF Olin 0 Plan fo Leue 0: Coninue eading Chap Snhoon adiaion adiaion fo eleon snhoon deies adiaion fo asonoial objes in iula obis 0/05/07 PHY 7 Sping 07 -- Leue 0 0/05/07 PHY
f t f a f x dx By Lin McMullin f x dx= f b f a. 2
 Accumulion: Thoughs On () By Lin McMullin f f f d = + The gols of he AP* Clculus progrm include he semen, Sudens should undersnd he definie inegrl s he ne ccumulion of chnge. 1 The Topicl Ouline includes
Accumulion: Thoughs On () By Lin McMullin f f f d = + The gols of he AP* Clculus progrm include he semen, Sudens should undersnd he definie inegrl s he ne ccumulion of chnge. 1 The Topicl Ouline includes
Average & instantaneous velocity and acceleration Motion with constant acceleration
 Physics 7: Lecure Reminders Discussion nd Lb secions sr meeing ne week Fill ou Pink dd/drop form if you need o swich o differen secion h is FULL. Do i TODAY. Homework Ch. : 5, 7,, 3,, nd 6 Ch.: 6,, 3 Submission
Physics 7: Lecure Reminders Discussion nd Lb secions sr meeing ne week Fill ou Pink dd/drop form if you need o swich o differen secion h is FULL. Do i TODAY. Homework Ch. : 5, 7,, 3,, nd 6 Ch.: 6,, 3 Submission
 WORK POWER AND ENERGY Consevaive foce a) A foce is said o be consevaive if he wok done by i is independen of pah followed by he body b) Wok done by a consevaive foce fo a closed pah is zeo c) Wok done
WORK POWER AND ENERGY Consevaive foce a) A foce is said o be consevaive if he wok done by i is independen of pah followed by he body b) Wok done by a consevaive foce fo a closed pah is zeo c) Wok done
5-1. We apply Newton s second law (specifically, Eq. 5-2). F = ma = ma sin 20.0 = 1.0 kg 2.00 m/s sin 20.0 = 0.684N. ( ) ( )
. F = ma = ma sin 20.0 = 1.0 kg 2.00 m/s sin 20.0 = 0.684N. ( ) ( )") 5-1. We apply Newon s second law (specfcally, Eq. 5-). (a) We fnd he componen of he foce s ( ) ( ) F = ma = ma cos 0.0 = 1.00kg.00m/s cos 0.0 = 1.88N. (b) The y componen of he foce s ( ) ( ) F = ma = ma
5-1. We apply Newon s second law (specfcally, Eq. 5-). (a) We fnd he componen of he foce s ( ) ( ) F = ma = ma cos 0.0 = 1.00kg.00m/s cos 0.0 = 1.88N. (b) The y componen of he foce s ( ) ( ) F = ma = ma
Derivation of the differential equation of motion
 Divion of h iffnil quion of oion Fis h noions fin h will us fo h ivion of h iffnil quion of oion. Rollo is hough o -insionl isk. xnl ius of h ll isnc cn of ll (O) - IDU s cn of gviy (M) θ ngl of inclinion
Divion of h iffnil quion of oion Fis h noions fin h will us fo h ivion of h iffnil quion of oion. Rollo is hough o -insionl isk. xnl ius of h ll isnc cn of ll (O) - IDU s cn of gviy (M) θ ngl of inclinion
Addition & Subtraction of Polynomials
 Addiion & Sucion of Polynomil Addiion of Polynomil: Adding wo o moe olynomil i imly me of dding like em. The following ocedue hould e ued o dd olynomil 1. Remove enhee if hee e enhee. Add imil em. Wie
Addiion & Sucion of Polynomil Addiion of Polynomil: Adding wo o moe olynomil i imly me of dding like em. The following ocedue hould e ued o dd olynomil 1. Remove enhee if hee e enhee. Add imil em. Wie
Radial geodesics in Schwarzschild spacetime
 Rdil geodesics in Schwzschild spcetime Spheiclly symmetic solutions to the Einstein eqution tke the fom ds dt d dθ sin θdϕ whee is constnt. We lso hve the connection components, which now tke the fom using
Rdil geodesics in Schwzschild spcetime Spheiclly symmetic solutions to the Einstein eqution tke the fom ds dt d dθ sin θdϕ whee is constnt. We lso hve the connection components, which now tke the fom using
e 2t u(t) e 2t u(t) =?
 e 2t u(t) =?") EE : Signals, Sysems, and Transforms Fall 7. Skech he convoluion of he following wo signals. Tes No noes, closed book. f() Show your work. Simplify your answers. g(). Using he convoluion inegral, find
EE : Signals, Sysems, and Transforms Fall 7. Skech he convoluion of he following wo signals. Tes No noes, closed book. f() Show your work. Simplify your answers. g(). Using he convoluion inegral, find
The Production of Polarization
 Physics 36: Waves Lecue 13 3/31/211 The Poducion of Polaizaion Today we will alk abou he poducion of polaized ligh. We aleady inoduced he concep of he polaizaion of ligh, a ansvese EM wave. To biefly eview
Physics 36: Waves Lecue 13 3/31/211 The Poducion of Polaizaion Today we will alk abou he poducion of polaized ligh. We aleady inoduced he concep of he polaizaion of ligh, a ansvese EM wave. To biefly eview
22.615, MHD Theory of Fusion Systems Prof. Freidberg Lecture 9: The High Beta Tokamak
 .65, MHD Theory of Fusion Sysems Prof. Freidberg Lecure 9: The High e Tokmk Summry of he Properies of n Ohmic Tokmk. Advnges:. good euilibrium (smll shif) b. good sbiliy ( ) c. good confinemen ( τ nr )
.65, MHD Theory of Fusion Sysems Prof. Freidberg Lecure 9: The High e Tokmk Summry of he Properies of n Ohmic Tokmk. Advnges:. good euilibrium (smll shif) b. good sbiliy ( ) c. good confinemen ( τ nr )
One of the common descriptions of curvilinear motion uses path variables, which are measurements made along the tangent t and normal n to the path of
 Oe of he commo descipios of cuilie moio uses ph ibles, which e mesuemes mde log he ge d oml o he ph of he picles. d e wo ohogol xes cosideed sepely fo eey is of moio. These coodies poide ul descipio fo
Oe of he commo descipios of cuilie moio uses ph ibles, which e mesuemes mde log he ge d oml o he ph of he picles. d e wo ohogol xes cosideed sepely fo eey is of moio. These coodies poide ul descipio fo
BINOMIAL THEOREM OBJECTIVE PROBLEMS in the expansion of ( 3 +kx ) are equal. Then k =
 are equal. Then k =") wwwskshieduciocom BINOMIAL HEOREM OBJEIVE PROBLEMS he coefficies of, i e esio of k e equl he k /7 If e coefficie of, d ems i e i AP, e e vlue of is he coefficies i e,, 7 ems i e esio of e i AP he 7 7 em
wwwskshieduciocom BINOMIAL HEOREM OBJEIVE PROBLEMS he coefficies of, i e esio of k e equl he k /7 If e coefficie of, d ems i e i AP, e e vlue of is he coefficies i e,, 7 ems i e esio of e i AP he 7 7 em
(a) Counter-Clockwise (b) Clockwise ()N (c) No rotation (d) Not enough information
 Counter-Clockwise (b) Clockwise ()N (c) No rotation (d) Not enough information") m m m00 kg dult, m0 kg bby. he seesw stts fom est. Which diection will it ottes? ( Counte-Clockwise (b Clockwise ( (c o ottion ti (d ot enough infomtion Effect of Constnt et oque.3 A constnt non-zeo toque
m m m00 kg dult, m0 kg bby. he seesw stts fom est. Which diection will it ottes? ( Counte-Clockwise (b Clockwise ( (c o ottion ti (d ot enough infomtion Effect of Constnt et oque.3 A constnt non-zeo toque
The shortest path between two truths in the real domain passes through the complex domain. J. Hadamard
 Complex Analysis R.G. Halbud R.Halbud@ucl.ac.uk Depamen of Mahemaics Univesiy College London 202 The shoes pah beween wo uhs in he eal domain passes hough he complex domain. J. Hadamad Chape The fis fundamenal
Complex Analysis R.G. Halbud R.Halbud@ucl.ac.uk Depamen of Mahemaics Univesiy College London 202 The shoes pah beween wo uhs in he eal domain passes hough he complex domain. J. Hadamad Chape The fis fundamenal
Chapter 10. Simple Harmonic Motion and Elasticity. Goals for Chapter 10
 Chper 0 Siple Hronic Moion nd Elsiciy Gols or Chper 0 o ollow periodic oion o sudy o siple hronic oion. o sole equions o siple hronic oion. o use he pendulu s prooypicl syse undergoing siple hronic oion.
Chper 0 Siple Hronic Moion nd Elsiciy Gols or Chper 0 o ollow periodic oion o sudy o siple hronic oion. o sole equions o siple hronic oion. o use he pendulu s prooypicl syse undergoing siple hronic oion.
Today - Lecture 13. Today s lecture continue with rotations, torque, Note that chapters 11, 12, 13 all involve rotations
 Today - Lecue 13 Today s lecue coninue wih oaions, oque, Noe ha chapes 11, 1, 13 all inole oaions slide 1 eiew Roaions Chapes 11 & 1 Viewed fom aboe (+z) Roaional, o angula elociy, gies angenial elociy
Today - Lecue 13 Today s lecue coninue wih oaions, oque, Noe ha chapes 11, 1, 13 all inole oaions slide 1 eiew Roaions Chapes 11 & 1 Viewed fom aboe (+z) Roaional, o angula elociy, gies angenial elociy
the king's singers And So It Goes the colour of song Words and Vusic by By Joel LEONARD Arranged by Bob Chilcott
 085850 SATB div cppell US $25 So Goes Wods nd Vusic by By Joel Anged by Bob Chilco he king's singes L he colou of song A H EXCLUSVELY DSTRBUTED BY LEONARD (Fom The King's Singes 25h Annivesy Jubilee) So
085850 SATB div cppell US $25 So Goes Wods nd Vusic by By Joel Anged by Bob Chilco he king's singes L he colou of song A H EXCLUSVELY DSTRBUTED BY LEONARD (Fom The King's Singes 25h Annivesy Jubilee) So
Lecture 10. Solution of Nonlinear Equations - II
 Fied point Poblems Lectue Solution o Nonline Equtions - II Given unction g : R R, vlue such tht gis clled ied point o the unction g, since is unchnged when g is pplied to it. Whees with nonline eqution
Fied point Poblems Lectue Solution o Nonline Equtions - II Given unction g : R R, vlue such tht gis clled ied point o the unction g, since is unchnged when g is pplied to it. Whees with nonline eqution
Lecture 17: Kinetics of Phase Growth in a Two-component System:
 Lecue 17: Kineics of Phase Gowh in a Two-componen Sysem: descipion of diffusion flux acoss he α/ ineface Today s opics Majo asks of oday s Lecue: how o deive he diffusion flux of aoms. Once an incipien
Lecue 17: Kineics of Phase Gowh in a Two-componen Sysem: descipion of diffusion flux acoss he α/ ineface Today s opics Majo asks of oday s Lecue: how o deive he diffusion flux of aoms. Once an incipien
MTH 146 Class 11 Notes
 8.- Are of Surfce of Revoluion MTH 6 Clss Noes Suppose we wish o revolve curve C round n is nd find he surfce re of he resuling solid. Suppose f( ) is nonnegive funcion wih coninuous firs derivive on he
8.- Are of Surfce of Revoluion MTH 6 Clss Noes Suppose we wish o revolve curve C round n is nd find he surfce re of he resuling solid. Suppose f( ) is nonnegive funcion wih coninuous firs derivive on he
Read Range Analysis of Passive RFID Systems for Manufacturing Control Systems
 Red Rnge Anlysis of Pssive RFID Sysems fo Mnufcuing Conol Sysems M. Keskilmmi, L. Sydänheimo, P. Slonen, M. Kivikoski leconics Tmpee Univesiy of Technology P.O. Box 69, FIN-3311 Tmpee FINLAND Absc: - An
Red Rnge Anlysis of Pssive RFID Sysems fo Mnufcuing Conol Sysems M. Keskilmmi, L. Sydänheimo, P. Slonen, M. Kivikoski leconics Tmpee Univesiy of Technology P.O. Box 69, FIN-3311 Tmpee FINLAND Absc: - An
10 m, so the distance from the Sun to the Moon during a solar eclipse is. The mass of the Sun, Earth, and Moon are = =
 Chpte 1 nivesl Gvittion 11 *P1. () The un-th distnce is 1.4 nd the th-moon 8 distnce is.84, so the distnce fom the un to the Moon duing sol eclipse is 11 8 11 1.4.84 = 1.4 The mss of the un, th, nd Moon
Chpte 1 nivesl Gvittion 11 *P1. () The un-th distnce is 1.4 nd the th-moon 8 distnce is.84, so the distnce fom the un to the Moon duing sol eclipse is 11 8 11 1.4.84 = 1.4 The mss of the un, th, nd Moon
PHYSICS 1210 Exam 1 University of Wyoming 14 February points
 PHYSICS 1210 Em 1 Uniersiy of Wyoming 14 Februry 2013 150 poins This es is open-noe nd closed-book. Clculors re permied bu compuers re no. No collborion, consulion, or communicion wih oher people (oher
PHYSICS 1210 Em 1 Uniersiy of Wyoming 14 Februry 2013 150 poins This es is open-noe nd closed-book. Clculors re permied bu compuers re no. No collborion, consulion, or communicion wih oher people (oher
Fundamental Vehicle Loads & Their Estimation
 Fundaenal Vehicle Loads & Thei Esiaion The silified loads can only be alied in he eliinay design sage when he absence of es o siulaion daa They should always be qualified and udaed as oe infoaion becoes
Fundaenal Vehicle Loads & Thei Esiaion The silified loads can only be alied in he eliinay design sage when he absence of es o siulaion daa They should always be qualified and udaed as oe infoaion becoes
Mark Scheme (Results) January 2008
 January 2008") Mk Scheme (Results) Jnuy 00 GCE GCE Mthemtics (6679/0) Edecel Limited. Registeed in Englnd nd Wles No. 4496750 Registeed Office: One90 High Holbon, London WCV 7BH Jnuy 00 6679 Mechnics M Mk Scheme Question
Mk Scheme (Results) Jnuy 00 GCE GCE Mthemtics (6679/0) Edecel Limited. Registeed in Englnd nd Wles No. 4496750 Registeed Office: One90 High Holbon, London WCV 7BH Jnuy 00 6679 Mechnics M Mk Scheme Question
Technical Appendix for Inventory Management for an Assembly System with Product or Component Returns, DeCroix and Zipkin, Management Science 2005.
 Techc Appedx fo Iveoy geme fo Assemy Sysem wh Poduc o Compoe eus ecox d Zp geme Scece 2005 Lemm µ µ s c Poof If J d µ > µ he ˆ 0 µ µ µ µ µ µ µ µ Sm gumes essh he esu f µ ˆ > µ > µ > µ o K ˆ If J he so
Techc Appedx fo Iveoy geme fo Assemy Sysem wh Poduc o Compoe eus ecox d Zp geme Scece 2005 Lemm µ µ s c Poof If J d µ > µ he ˆ 0 µ µ µ µ µ µ µ µ Sm gumes essh he esu f µ ˆ > µ > µ > µ o K ˆ If J he so
How to Prove the Riemann Hypothesis Author: Fayez Fok Al Adeh.
 How o Prove he Riemnn Hohesis Auhor: Fez Fok Al Adeh. Presiden of he Srin Cosmologicl Socie P.O.Bo,387,Dmscus,Sri Tels:963--77679,735 Emil:hf@scs-ne.org Commens: 3 ges Subj-Clss: Funcionl nlsis, comle
How o Prove he Riemnn Hohesis Auhor: Fez Fok Al Adeh. Presiden of he Srin Cosmologicl Socie P.O.Bo,387,Dmscus,Sri Tels:963--77679,735 Emil:hf@scs-ne.org Commens: 3 ges Subj-Clss: Funcionl nlsis, comle
Motion. Part 2: Constant Acceleration. Acceleration. October Lab Physics. Ms. Levine 1. Acceleration. Acceleration. Units for Acceleration.
 Moion Accelerion Pr : Consn Accelerion Accelerion Accelerion Accelerion is he re of chnge of velociy. = v - vo = Δv Δ ccelerion = = v - vo chnge of velociy elpsed ime Accelerion is vecor, lhough in one-dimensionl
Moion Accelerion Pr : Consn Accelerion Accelerion Accelerion Accelerion is he re of chnge of velociy. = v - vo = Δv Δ ccelerion = = v - vo chnge of velociy elpsed ime Accelerion is vecor, lhough in one-dimensionl
0 for t < 0 1 for t > 0
 8.0 Sep nd del funcions Auhor: Jeremy Orloff The uni Sep Funcion We define he uni sep funcion by u() = 0 for < 0 for > 0 I is clled he uni sep funcion becuse i kes uni sep = 0. I is someimes clled he Heviside
8.0 Sep nd del funcions Auhor: Jeremy Orloff The uni Sep Funcion We define he uni sep funcion by u() = 0 for < 0 for > 0 I is clled he uni sep funcion becuse i kes uni sep = 0. I is someimes clled he Heviside
Reinforcement learning
 Lecue 3 Reinfocemen leaning Milos Hauskech milos@cs.pi.edu 539 Senno Squae Reinfocemen leaning We wan o lean he conol policy: : X A We see examples of x (bu oupus a ae no given) Insead of a we ge a feedback
Lecue 3 Reinfocemen leaning Milos Hauskech milos@cs.pi.edu 539 Senno Squae Reinfocemen leaning We wan o lean he conol policy: : X A We see examples of x (bu oupus a ae no given) Insead of a we ge a feedback
6. Gas dynamics. Ideal gases Speed of infinitesimal disturbances in still gas
 6. Gs dynmics Dr. Gergely Krisóf De. of Fluid echnics, BE Februry, 009. Seed of infiniesiml disurbnces in sill gs dv d, dv d, Coninuiy: ( dv)( ) dv omenum r r heorem: ( ( dv) ) d 3443 4 q m dv d dv llievi
6. Gs dynmics Dr. Gergely Krisóf De. of Fluid echnics, BE Februry, 009. Seed of infiniesiml disurbnces in sill gs dv d, dv d, Coninuiy: ( dv)( ) dv omenum r r heorem: ( ( dv) ) d 3443 4 q m dv d dv llievi
ANSWERS TO EVEN NUMBERED EXERCISES IN CHAPTER 2
 ANSWERS TO EVEN NUMBERED EXERCISES IN CHAPTER Seion Eerise -: Coninuiy of he uiliy funion Le λ ( ) be he monooni uiliy funion defined in he proof of eisene of uiliy funion If his funion is oninuous y hen
ANSWERS TO EVEN NUMBERED EXERCISES IN CHAPTER Seion Eerise -: Coninuiy of he uiliy funion Le λ ( ) be he monooni uiliy funion defined in he proof of eisene of uiliy funion If his funion is oninuous y hen
Lecture 5. Chapter 3. Electromagnetic Theory, Photons, and Light
 Lecue 5 Chape 3 lecomagneic Theo, Phoons, and Ligh Gauss s Gauss s Faada s Ampèe- Mawell s + Loen foce: S C ds ds S C F dl dl q Mawell equaions d d qv A q A J ds ds In mae fields ae defined hough ineacion
Lecue 5 Chape 3 lecomagneic Theo, Phoons, and Ligh Gauss s Gauss s Faada s Ampèe- Mawell s + Loen foce: S C ds ds S C F dl dl q Mawell equaions d d qv A q A J ds ds In mae fields ae defined hough ineacion
Week 10: DTMC Applications Ranking Web Pages & Slotted ALOHA. Network Performance 10-1
 Week : DTMC Alictions Rnking Web ges & Slotted ALOHA etwok efonce - Outline Aly the theoy of discete tie Mkov chins: Google s nking of web-ges Wht ge is the use ost likely seching fo? Foulte web-gh s Mkov
Week : DTMC Alictions Rnking Web ges & Slotted ALOHA etwok efonce - Outline Aly the theoy of discete tie Mkov chins: Google s nking of web-ges Wht ge is the use ost likely seching fo? Foulte web-gh s Mkov
Motion on a Curve and Curvature
 Moion on Cue nd Cuue his uni is bsed on Secions 9. & 9.3, Chpe 9. All ssigned edings nd execises e fom he exbook Objecies: Mke cein h you cn define, nd use in conex, he ems, conceps nd fomuls lised below:
Moion on Cue nd Cuue his uni is bsed on Secions 9. & 9.3, Chpe 9. All ssigned edings nd execises e fom he exbook Objecies: Mke cein h you cn define, nd use in conex, he ems, conceps nd fomuls lised below:
Non-sinusoidal Signal Generators
 Non-sinusoidal Signal Geneaos ecangle, iangle, saw ooh, pulse, ec. Muliibao cicuis: asable no sable saes (wo quasi-sable saes; i emains in each sae fo pedeemined imes) monosable one sable sae, one unsable
Non-sinusoidal Signal Geneaos ecangle, iangle, saw ooh, pulse, ec. Muliibao cicuis: asable no sable saes (wo quasi-sable saes; i emains in each sae fo pedeemined imes) monosable one sable sae, one unsable
Sections 3.1 and 3.4 Exponential Functions (Growth and Decay)
") Secions 3.1 and 3.4 Eponenial Funcions (Gowh and Decay) Chape 3. Secions 1 and 4 Page 1 of 5 Wha Would You Rahe Have... $1million, o double you money evey day fo 31 days saing wih 1cen? Day Cens Day Cens
Secions 3.1 and 3.4 Eponenial Funcions (Gowh and Decay) Chape 3. Secions 1 and 4 Page 1 of 5 Wha Would You Rahe Have... $1million, o double you money evey day fo 31 days saing wih 1cen? Day Cens Day Cens
Optimization. x = 22 corresponds to local maximum by second derivative test
 Optimiztion Lectue 17 discussed the exteme vlues of functions. This lectue will pply the lesson fom Lectue 17 to wod poblems. In this section, it is impotnt to emembe we e in Clculus I nd e deling one-vible
Optimiztion Lectue 17 discussed the exteme vlues of functions. This lectue will pply the lesson fom Lectue 17 to wod poblems. In this section, it is impotnt to emembe we e in Clculus I nd e deling one-vible
Generalized Fibonacci-Type Sequence and its Properties
 Geelized Fibocci-Type Sequece d is Popeies Ompsh Sihwl shw Vys Devshi Tuoil Keshv Kuj Mdsu (MP Idi Resech Schol Fculy of Sciece Pcific Acdemy of Highe Educio d Resech Uivesiy Udipu (Rj Absc: The Fibocci
Geelized Fibocci-Type Sequece d is Popeies Ompsh Sihwl shw Vys Devshi Tuoil Keshv Kuj Mdsu (MP Idi Resech Schol Fculy of Sciece Pcific Acdemy of Highe Educio d Resech Uivesiy Udipu (Rj Absc: The Fibocci
LECTURE 5. is defined by the position vectors r, 1. and. The displacement vector (from P 1 to P 2 ) is defined through r and 1.
 is defined through r and 1.") LECTURE 5 ] DESCRIPTION OF PARTICLE MOTION IN SPACE -The displcemen, veloci nd cceleion in -D moion evel hei veco nue (diecion) houh he cuion h one mus p o hei sin. Thei full veco menin ppes when he picle
LECTURE 5 ] DESCRIPTION OF PARTICLE MOTION IN SPACE -The displcemen, veloci nd cceleion in -D moion evel hei veco nue (diecion) houh he cuion h one mus p o hei sin. Thei full veco menin ppes when he picle
Motion. ( (3 dim) ( (1 dim) dt. Equations of Motion (Constant Acceleration) Newton s Law and Weight. Magnitude of the Frictional Force
 ( (1 dim) dt. Equations of Motion (Constant Acceleration) Newton s Law and Weight. Magnitude of the Frictional Force") Insucos: ield/mche PHYSICS DEPARTMENT PHY 48 Em Sepeme 6, 4 Nme pin, ls fis: Signue: On m hono, I he neihe gien no eceied unuhoied id on his eminion. YOUR TEST NUMBER IS THE 5-DIGIT NUMBER AT THE TOP O
Insucos: ield/mche PHYSICS DEPARTMENT PHY 48 Em Sepeme 6, 4 Nme pin, ls fis: Signue: On m hono, I he neihe gien no eceied unuhoied id on his eminion. YOUR TEST NUMBER IS THE 5-DIGIT NUMBER AT THE TOP O
LAPLACE TRANSFORMS. 1. Basic transforms
 LAPLACE TRANSFORMS. Bic rnform In hi coure, Lplce Trnform will be inroduced nd heir properie exmined; ble of common rnform will be buil up; nd rnform will be ued o olve ome dierenil equion by rnforming
LAPLACE TRANSFORMS. Bic rnform In hi coure, Lplce Trnform will be inroduced nd heir properie exmined; ble of common rnform will be buil up; nd rnform will be ued o olve ome dierenil equion by rnforming
Two-Pion Exchange Currents in Photodisintegration of the Deuteron
 Two-Pion Exchange Cuens in Phoodisinegaion of he Deueon Dagaa Rozędzik and Jacek Goak Jagieonian Univesiy Kaków MENU00 3 May 00 Wiiasbug Conen Chia Effecive Fied Theoy ChEFT Eecoagneic cuen oeaos wihin
Two-Pion Exchange Cuens in Phoodisinegaion of he Deueon Dagaa Rozędzik and Jacek Goak Jagieonian Univesiy Kaków MENU00 3 May 00 Wiiasbug Conen Chia Effecive Fied Theoy ChEFT Eecoagneic cuen oeaos wihin
ENGR 1990 Engineering Mathematics The Integral of a Function as a Function
 ENGR 1990 Engineering Mhemics The Inegrl of Funcion s Funcion Previously, we lerned how o esime he inegrl of funcion f( ) over some inervl y dding he res of finie se of rpezoids h represen he re under
ENGR 1990 Engineering Mhemics The Inegrl of Funcion s Funcion Previously, we lerned how o esime he inegrl of funcion f( ) over some inervl y dding he res of finie se of rpezoids h represen he re under
X-Ray Notes, Part III
 oll 6 X-y oe 3: Pe X-Ry oe, P III oe Deeo Coe oupu o x-y ye h look lke h: We efe ue of que lhly ffee efo h ue y ovk: Co: C ΔS S Sl o oe Ro: SR S Co o oe Ro: CR ΔS C SR Pevouly, we ee he SR fo ye hv pxel
oll 6 X-y oe 3: Pe X-Ry oe, P III oe Deeo Coe oupu o x-y ye h look lke h: We efe ue of que lhly ffee efo h ue y ovk: Co: C ΔS S Sl o oe Ro: SR S Co o oe Ro: CR ΔS C SR Pevouly, we ee he SR fo ye hv pxel
INTEGRALS. Exercise 1. Let f : [a, b] R be bounded, and let P and Q be partitions of [a, b]. Prove that if P Q then U(P ) U(Q) and L(P ) L(Q).
![INTEGRALS. Exercise 1. Let f : [a, b] R be bounded, and let P and Q be partitions of [a, b]. Prove that if P Q then U(P ) U(Q) and L(P ) L(Q).](/thumbs/78/77677920.jpg "INTEGRALS. Exercise 1. Let f : [a, b] R be bounded, and let P and Q be partitions of [a, b]. Prove that if P Q then U(P ) U(Q) and L(P ) L(Q).") INTEGRALS JOHN QUIGG Eercise. Le f : [, b] R be bounded, nd le P nd Q be priions of [, b]. Prove h if P Q hen U(P ) U(Q) nd L(P ) L(Q). Soluion: Le P = {,..., n }. Since Q is obined from P by dding finiely
INTEGRALS JOHN QUIGG Eercise. Le f : [, b] R be bounded, nd le P nd Q be priions of [, b]. Prove h if P Q hen U(P ) U(Q) nd L(P ) L(Q). Soluion: Le P = {,..., n }. Since Q is obined from P by dding finiely
Electronic Supplementary Material
 Electonic Supplementy Mteil On the coevolution of socil esponsiveness nd behvioul consistency Mx Wolf, G Snde vn Doon & Fnz J Weissing Poc R Soc B 78, 440-448; 0 Bsic set-up of the model Conside the model
Electonic Supplementy Mteil On the coevolution of socil esponsiveness nd behvioul consistency Mx Wolf, G Snde vn Doon & Fnz J Weissing Poc R Soc B 78, 440-448; 0 Bsic set-up of the model Conside the model
Primal and Weakly Primal Sub Semi Modules
 Aein Inenionl Jounl of Conepoy eeh Vol 4 No ; Jnuy 204 Pil nd Wekly Pil ub ei odule lik Bineh ub l hei Depen Jodn Univeiy of iene nd Tehnology Ibid 220 Jodn Ab Le be ouive eiing wih ideniy nd n -ei odule
Aein Inenionl Jounl of Conepoy eeh Vol 4 No ; Jnuy 204 Pil nd Wekly Pil ub ei odule lik Bineh ub l hei Depen Jodn Univeiy of iene nd Tehnology Ibid 220 Jodn Ab Le be ouive eiing wih ideniy nd n -ei odule
7 Wave Equation in Higher Dimensions
 7 Wave Equaion in Highe Dimensions We now conside he iniial-value poblem fo he wave equaion in n dimensions, u c u x R n u(x, φ(x u (x, ψ(x whee u n i u x i x i. (7. 7. Mehod of Spheical Means Ref: Evans,
7 Wave Equaion in Highe Dimensions We now conside he iniial-value poblem fo he wave equaion in n dimensions, u c u x R n u(x, φ(x u (x, ψ(x whee u n i u x i x i. (7. 7. Mehod of Spheical Means Ref: Evans,
Classification of Equations Characteristics
 Clssiiion o Eqions Cheisis Consie n elemen o li moing in wo imensionl spe enoe s poin P elow. The ph o P is inie he line. The posiion ile is s so h n inemenl isne long is s. Le he goening eqions e epesene
Clssiiion o Eqions Cheisis Consie n elemen o li moing in wo imensionl spe enoe s poin P elow. The ph o P is inie he line. The posiion ile is s so h n inemenl isne long is s. Le he goening eqions e epesene
On The Estimation of Two Missing Values in Randomized Complete Block Designs
 Mahemaical Theoy and Modeling ISSN 45804 (Pape ISSN 505 (Online Vol.6, No.7, 06 www.iise.og On The Esimaion of Two Missing Values in Randomized Complee Bloc Designs EFFANGA, EFFANGA OKON AND BASSE, E.
Mahemaical Theoy and Modeling ISSN 45804 (Pape ISSN 505 (Online Vol.6, No.7, 06 www.iise.og On The Esimaion of Two Missing Values in Randomized Complee Bloc Designs EFFANGA, EFFANGA OKON AND BASSE, E.
Summary: Binomial Expansion...! r. where
 Summy: Biomil Epsio 009 M Teo www.techmejcmth-sg.wes.com ) Re-cp of Additiol Mthemtics Biomil Theoem... whee )!!(! () The fomul is ville i MF so studets do ot eed to memoise it. () The fomul pplies oly
Summy: Biomil Epsio 009 M Teo www.techmejcmth-sg.wes.com ) Re-cp of Additiol Mthemtics Biomil Theoem... whee )!!(! () The fomul is ville i MF so studets do ot eed to memoise it. () The fomul pplies oly
Stress Analysis of Infinite Plate with Elliptical Hole
 Sess Analysis of Infinie Plae ih Ellipical Hole Mohansing R Padeshi*, D. P. K. Shaa* * ( P.G.Suden, Depaen of Mechanical Engg, NRI s Insiue of Infoaion Science & Technology, Bhopal, India) * ( Head of,
Sess Analysis of Infinie Plae ih Ellipical Hole Mohansing R Padeshi*, D. P. K. Shaa* * ( P.G.Suden, Depaen of Mechanical Engg, NRI s Insiue of Infoaion Science & Technology, Bhopal, India) * ( Head of,
MATHEMATICAL FOUNDATIONS FOR APPROXIMATING PARTICLE BEHAVIOUR AT RADIUS OF THE PLANCK LENGTH
 Fundamenal Jounal of Mahemaical Phsics Vol 3 Issue 013 Pages 55-6 Published online a hp://wwwfdincom/ MATHEMATICAL FOUNDATIONS FOR APPROXIMATING PARTICLE BEHAVIOUR AT RADIUS OF THE PLANCK LENGTH Univesias
Fundamenal Jounal of Mahemaical Phsics Vol 3 Issue 013 Pages 55-6 Published online a hp://wwwfdincom/ MATHEMATICAL FOUNDATIONS FOR APPROXIMATING PARTICLE BEHAVIOUR AT RADIUS OF THE PLANCK LENGTH Univesias