FALL UNIVERSITY OF NEVADA, LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING MEG 421 Automatic Controls Design Project
|
|
|
- Kevin Lawrence
- 5 years ago
- Views:
Transcription

1 FALL UNIVERSITY OF NEVADA, LAS VEGAS DEPARTMENT OF MECHANICAL ENGINEERING MEG 421 Automatic Controls Design Project Objective: The design project will give everyone in the class an opportunity to apply the knowledge gained in class in a reasonably realistic setting. We will analyze plants, their dynamics and other properties, and explore design strategies by which we can create a good controller while considering the existing constraints. General Rules for all Reports As Seniors, you will be graduating soon. Prepare the reports as you would for a supervisor at your place of employment. Make the report as clear and transparent as possible. Graphs and Figures * Figure 1 DC Motor with limiter Every graph must have a descriptive Title. Label and Scale All axes. If a plot contains multiple lines, you must add a legend explaining each curve. Add handwritten legends if needed. Do NOT paste Matlab Scope images into the report, since they do not contain proper labeling. VisSim or Simulink Models: Avoid overlapping and crossing lines a much as possible. Re-arrange the icons so that a clear path from left to right is visible.
2 The schedule below lists due dates and assignments for the individual parts of the project. Due dates are Wednesdays of the week listed, before class. Due Week Topic date 7 Wed. 10/19 Report #1 Part 1: Model the plant assigned to you. Each plant has one input and one output variable. Choose state variables, create free-body diagrams, and determine the plant s differential equation in state variable form, see examples on pages 10 and 11. Express the plant model in transfer function form (by hand or better in Mathcad), and compute all plant poles. If your model is nonlinear, e.g. the independent variable comprises sinusoidal or quadratic terms, linearize the model equation about its operating point. Part 2: Model the complete linear open-loop system including the plant. Specify input and output variables, disturbances, and transfer functions. The complete open-loop system begins with a controller (model initially as gain K), followed by an amplifier (with limiter in the nonlinear case), the actuator = DC motor (see also second lab handout File: lab2v.pdf or the DC motor discussion in the textbook, Chapter 2), and the system being controlled. No sensor is specified. Assume that the controlled directly available to the controller. Select an appropriately sized DC servomotor (see instructions below) and amplifier to drive the plant. Part 3: Create a Linear open-loop computer model as seen in Fig. 1 below, where the plant is represented as the transfer function of part 1. Use VisSim or Simulink. Do not yet define the nonlinear elements (Limiter and Coulomb friction) shown in Fig. 1. Submit: 1. The complete validated model of your plant, including all free-body diagrams used to derive the state equations. Validation: Show that your plant is stable, i.e. that it has NO poles in the right half of the s-plane, see below. 2. The plant model in transfer function format, see example below. If you compute the transfer function and plant poles in Mathcad (RECOMMENDED) please include your Mathcad model in the report. 3. Verify that the model is open-loop stable by computing all plant poles. Submissions containing unstable plant poles are not accepted. List the Plant transfer function and all plant poles. Any undamped oscillators in the plant will result in imaginary axis pole pairs. However, if you discover unstable poles in the right half of the s-plane, please review your plant model for errors. All assigned plants are open-loop stable and therefore cannot have poles in the right half of the s-plane. 4. Validated VisSim or Matlab model, 5. a plot of the open-loop step response, in VisSim or Matlab. Please select the time scales so that both the transition and the steady state are visible. Again: Submissions containing system models with rhp poles will not be accepted.
3 10 11/02 Report #2 Part 1: Using the validated plant model of report 1, create a Nonlinear model VisSim or Simulink model only. Place the limiter after the amplifier, see Fig. 1. If a limiter is not explicitly given in the manufacturer s motor data sheet, choose it such that it limits the actuator output at approx. 70% of its maximum current. Part 2: Using a unit step reference input, design a P-controller for approx. 20% overshoot (if your plant is too poorly damped, document this fact and design for a larger overshoot. If your plant has imaginary axis poles, the closed loop may be unstable with P-control for any gain K. If the closed loop is unstable, demonstrate this fact by plotting the plant s root locus). Simulate and plot the feedback system step response with P-control for two scenarios: (a) Linear Model : No Limiter (b) Nonlinear Model with Limiter. Show the complete block diagram of both linear and nonlinear feedback systems. Verify that the loop has negative feedback. Also, compute and plot the closed loop system response to an appropriately sized disturbance step (r = 0). Place the disturbance between servo amplifier output and plant input, see Fig. 1.
4 Notes on defining the Limiter: Physical significance: The limiter models the fact that no real actuator can deliver infinite power. Check your motor specifications sheet for the input voltage range (typically +/- 10 Volts DC or similar). These values constitute the VOLTAGE LIMITER in Fig. 1. Your servo-amplifier will also have a current limit (max. current spec.) which you can enter in the model of Fig. 1 as a CURRENT LIMITER. Model the limiter in Matlab Simulink or VisSim. Limiter Dynamics: Try the limiter at different load levels. You ll observe that the control loop will be linear as long as the voltage input to the amplifier is within the the input voltage range (typically +/- 10 Volts DC or similar). Only when the voltage exceeds the limits will you see clipping. Run your simulations at step sizes large enough that clipping is visible. Graphing with Simulink: Use the SCOPE feature only while designing your control loop. For submission, connect the variables you wish to plot to a SIMOUT block (located in sinks). plot the results using the plot command. Please add a descriptive title to each plot, label all axes, and add legends whenever you plot multiple variables in the same plot. Use the Matlab legend or gtext command to label curves. Here is a Matlab code example that plots two responses from a simulink model ContinDiscrete.mdl. sim('contindiscrete') figure(1) plot(ycd(:,1),ycd(:,2),':') hold on plot(ycd(:,1),ycd(:,3)) xlabel('time (sec)'); ylabel(' responses'); title(' Responses of Continuous vs. Discrete Control') gtext('continuous controller') gtext('discrete controller, T =.07') grid on
5 1.4 Responses of Continuous vs. Discrete Control 1.2 continuous controller discrete controller, T =.07 1 responses Time (sec) Submit: Plant mathematical model and both VisSim or Matlab models (a) and (b) Plots: 1. Closed loop step responses for (a) and (b) in the same graph. 2. Closed loop disturbance responses for (a) and (b) in the same graph. For both plots, select the time scales so that both the transition and the steady state are visible. Re. Assignment #3: Show detail in all Root Locus plots, see examples below:

6 Never submit this: The poles and zeros near the origin are invisible. Better: Zoom in to show detail: 11 11/09 Report #3 Objective: Your task is to optimize your controller design to meet the following goals: reduce the steady state error as much as possible. Raise damping ζ to an optimum. Ideally ζ should be in the range from 0.5 to 0.7. Minimize the response time to reach the steady state value. You ll find that a compromise between these multiple goals will be necessary, and in some cases, you may not be able to meet all goals. Document your design choices and explain how you arrived at your final design. Procedure: Analyze the plant root locus, and design a compensator for the plant. The compensator may consist of any combination of the following: lead, lag, allpass filter. Simulate the feedback system step response with your compensator. The allpass filter can be of use to move conjugate complex pole pairs away from the imaginary axis. Important: Use the Matlab SISOTOOL to design lead, lag, and allpass filters. Design not merely for the specified overshoot, but also ensure that the steady state error is as small as possible. Start with the lead and/or allpass first. You can combine several
7 compensators, but remember that the number of compensator zeros must never exceed the number of compensator poles. Only after completing the lead/allpass design, add a lag filter if this is beneficial, i.e. if lag reduces the steady state error further. The lag pole should be close to the origin. Document the final design in your report, list all compensator poles and zeros, list the compensator transfer function, and plot the closed loop step response of the final design. Note: If your plant has two imaginary axis pole pairs, and if you cannot stabilize the closed loop with an allpass filter, you may add damping up to ζ = 0.2 to one of the pole pairs. Example: The model below contains two imaginary axis pole pairs in the first and third row equations. M1 s 2 + K x ( s) s x2 Fs ( ) ( s) 2 x3 0 M2 + K2 Add damping up to ζ = 0.2 to ONE row only. If you choose to add damping to the first row, compute damping coefficient B according to Chapter 3 (e.g. Equation 3.64). In the case of the row-1 pole pair, the equivalences are ω n = K 1 /M 1, and B/M 1 = 2ζ ω n, allowing the computation of B. The modified model would then result as: M1 s 2 + Bs + K1 10 s s s 2 M2 + K2 If you choose to alter the damping of one pole pair, document all steps of the process, compute the altered transfer function, including its open-loop poles and zeros. You should now be able to control the remaining single pole pair on the imaginary axis with a lead compensator. Describe and document clearly: plant and compensator transfer functions, definition of limiter, closed loop block diagrams. Document clearly the process by which you arrived at your choice of (lead and/or lag) compensator. Design the linear system first and document results in the first two plots. After completion of the compensator design, analyze the closed loop with the limiter and compare, in the third plot, the effect of the finite amplifier power on closed loop performance. Submit: - Plant mathematical model and VisSim or Matlab models - Plant transfer function and all plant poles. Plots: root locus of linear system incl. the final compensator Comparison: closed loop step responses with P-control (from project 2) vs. new compensator, both in same graph.. closed loop step responses (a)(linear) and (b)(nonlinear), both in same graph /16 Report #4 Analyze Plant Frequency response, design lead and/or lag and/or allpass compensator for the plant in the Bode plot. Simulate the feedback system step response with lead and/or lag control. Important: Use the Matlab SISOTOOL to design lead, lag, and allpass filters. Design not merely for the specified overshoot, but also ensure that the steady state error is as small as possible. Design using the lead and/or allpass first. You can combine several x1 x2 x3 0 Fs () 0
8 compensators, but remember that the number of compensator zeros must never exceed the number of compensator poles. Only after completing the lead/allpass design, add a lag filter if this is beneficial, i.e. if lag reduces the steady state error further.. The lag pole should be close to the origin. Document the final design in your report, list all compensator poles and zeros, list the compensator transfer function, and plot the closed loop step response of the final design. The Bode plot allows you to judge the effect of pole and zero placements better than the root locus plots. Place the compensator zero(s) such that you have an optimal phase margin at the gain crossover frequency. At the same time, the lead should be fast enough so that the magnitude plot crosses the 0-dB line as soon as possible. Describe and document clearly: plant and compensator transfer functions, definition of limiter, closed loop block diagrams. Document clearly the process by which you arrived at your choice of compensator. Design the linear system first and document results in the first two plots. After completion of the compensator design, add the limiter and compare, in the third plot, the effect of the finite amplifier power on closed loop performance. Submit: Plant mathematical model and VisSim or Matlab models Plots: Bode plots of linear system incl. the lead and/or lag compensator. Document how you chose the compensator, starting from the open-loop plant without lead and/or lag. After completing the design, show the Bode plot of the improved open-loop system including the lead and/or lag compensator and gain K of your choice. Comparison of (closed-loop) P-control vs. lead and/or lag control, both in same graph. closed loop step responses (a)(linear) and (b)(nonlinear), both in same graph /23 Final report: Review and finalize actuator needs. Review the actuator choice you made for report #1. Please recall that your actuator should deliver sufficient torque to deliver the same steady state response as the linear system. However, unlike the linear system which implicitly assumes an infinite power supply, use actual motor parameters from manufacturers specifications to select a motor/actuator that delivers the same steady state response as the linear system, but with power limited to perhaps 50% to 100% above the steady state power requirements. Define the limiter consistent with your DC motor and servo amplifier specifications. Document clearly how you transferred the DC motor specs to your block diagram. Define two realistic actuators (e.g. a marginal DC motor that can barely move the plant to the desired output value) and a large DC motor/servoamplifier (between 150% and 200% of the torque of the marginal design). Model both control loops with correctly defined output limiters. One design will deliver relatively low power and the other will deliver a faster response. Since actuators and servo amplifiers are typically expensive, present your supervisor two alternate design choices. Option 1 will normally be slower and less expensive. Option 2 will normally be faster and more costly. Submit: Plant mathematical model and VisSim or Matlab models, calculations of the limiter values for both actuator designs. Plot the following three closed loop system step responses in the same graph: (a) linear system step response, reflecting your best design. (b) both closed loop step responses for the two motor choices. (Include the spec sheets specifying motor torque constant and max. voltage/current). For the response plots, select the time scales so that both the transition and the steady state are visible.
9 Actuator selection for all plants: Build your model according to Fig. 1 in Matlab or Vissim. Use a DC Motor driven by a servo-amplifier to power all plants. You may initially use arbitrary values for the motor parameters. Add a plot to the output variable (output vs. time), apply perhaps an input voltage of 10V to the motor, and observe the output as you vary the motor torque constant, K t. Now modify the motor torque constant such that the motor can displace the output variable (by +/- 0.1m for translation type output), (or by +/- 0.5 radians if the output an angle) exhibits a rise time (see Chapter 3.4 for definitions) of about 300 ms or less. For systems with large masses or inertiae, slower step responses are in order, so use your judgment on what would constitute a reasonable motor choice in the context of your assignment. Using the servomotor vendor specs on the web, locate a motor that approximately meets the requirements. All servomotors require a servo-amplifier. The servo-amplifier is shown as gain K amp in Fig. 1. The servo-amplifier supplies the variable power requested by the controller. Select the servo-amplifier so that it matches approximately the motor specifications. You are free to select any real K t and V armature. Document your motor selection (URL and printout of motor specs). Identify an industrial motor that closely meets your application s requirements. You can find DC servomotor vendors on the web. See for instance: Include the motor selection and its list of parameters in report #1. Motor Dynamics Model: Follow example 2.11 in Franklin s book. The output of the motor is the torque τ(t). The standard DC servomotor model also contains a back-emf or speed voltage. You should neglect the back-emf because the motor speed is normally small. The transfer function for a voltage input and torque output now results as a first order term. If the motor is rigidly coupled to the first mass or inertia, simply add the motor inertia or its mass equivalent to the first dynamic element of your plant. Controller (model initially as gain, later as R(s) Lead controller) Volt age Controller K amp Actuator (model armature part of servo motor) Voltage Limiter Motor: K t /(Ls+R) Cur rent Current Limiter W(s) Disturbance Plant Y(s) Fig. 1 Motor Dynamics Model with Limiter(s)
10 Report #1: Developing the system model 1. Perform a free-body analysis for each inertia or mass. Remember: action = reaction, and make sure that the signs for springs and dampers are correct. See example at left. Make sure that all coupled springs and dampers respond correctly. For instance, if inertia J1 is coupled by a tension spring to mass M, the spring force must increase as the distance between J1 and M increases. 2. Apply Newton s law to each free-body mass/inertia. 3. Write your differential equation in matrix form, and use Laplace notation. Solving determinants and sorting terms is easiest in Mathcad. Use the symbolics menu. See also example below. 4. Your transfer function then results as output(s)/input(s), by applying Cramer s rule. Verify the open-loop stability of your plant by computing ALL plant poles. If you find any unstable poles, your model contains errors which you should correct before submitting the report. J 1 J text J 1 text 2 Start with the mass or inertia to which the external force/torque is applied. Here: Start with J 1 ω 2, θ 2 ω 1, θ 1 M A Inertia J 2 Force F Reaction is equal and opposite to the one at J 1 A Force F Load Torque r Inertia J 1 Reactions Reactions at J 2 : equal and Opposite to J 1 r Mass M Translation B Sample sixth-order Dynamics Model in Free-Body Analysis Matrix form, using Laplace notation: (done in Mathcad)
11 Sample Computation of the Plant poles (roots of the char. Equation) in Mathcad. You can use any other suitable software, e.g. Matlab. The char. Equation is shown below, note the bold = sign. In Mathcad, place cursor on the s-variable, then select Symbolics Variable Solve. The resulting solution vector is shown below. This plant is stable (no real parts > 0) Example: The Characteristic Equation: e-10s s s s s s has roots (poles) at: i Procedures: A progress report is due on each date listed. 2.24i 10 1
12 2. Use either VisSim or Matlab. You will be required to model linear as well as nonlinear systems. 3. Deliverables for each report include: Mathematical analysis, e.g. transfer functions, poles and zeros (linear model only). A plot of each VisSim or Simulink model used. Step response and other plots as specified in the schedule above. Use a report format similar to the format for the lab. See Individual assignments are listed below. Name Remarks Plant Schematic x 3 Albright,Jacob B
13 y Avelar,Lisett N Benavente,Ja mes Input is force Ft). is x 3 (t) = position of the last car relative to the middle car. K= 10 4 N/m/ B = 2*10 2 Ns/m M = 4500 kg, m= kg x 2 Bergstrom,Tre vor J






















14 Boles,Jeremia h θ = angle of rotation of beam J1 Spring Ks2 is unstretched at θ = 0. Assume that the angle θ is small and use linear approximati ons for sinθ or tanθ θ 1 Lever-Spring System. Input var: F1 = Force applied to Mass M1 in +x1- direction (down). Spring Stiffness 1 Ks1 80 N/m Spring Stiffness 2 Ks2 400 N/m, attached to ground Damping Coefficient Kd1 120 N s/m Rotational Inertia J1 12 Kg m^2 Mass of Block M1 15 Kg Distance from Fulcrum to Left End of Rod R1 = 0.3 m Distance from Fulcrum to Right End of Rod R2 = 0.7 m Bou Abdo, Rawad T ω 3 = angular velocity of the gear at θ 3 Brown,Robert J
15 ω 2 (t) angular velocity at θ 2 Burton,Mitchell P Data: Input is torque T(t) applied at J 1. θ 3 (t) Chagin Sanchez,Step hanie M
16 Charnkijtawaru sh,chanatan Input T(t), is x1(t) Christy,Jessic a M Conlin,Geoffre y M Active Suspension : A disturbance at B (change of terrain elevation z(t)) causes the cart to tilt. Control elevation y1 such that y1 = y2 Model the rotation θ(t) using a single constant inertia
17 Input F(t), θ(t),small angles Eckstein,Sally Fitzjerrells,Ale xander R
18 Input is force F(t). X 2 (t) Fjare,Paul D Frappier,Ann M Input is force F(t). x (t) = displacement of mass M. Inertia J is rolling only, no slipping relative to mass M. Spring K2 is attached to center of Inertia J1.

 =")

















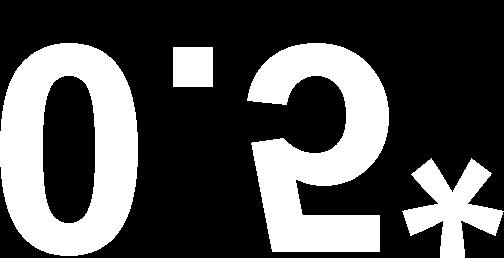
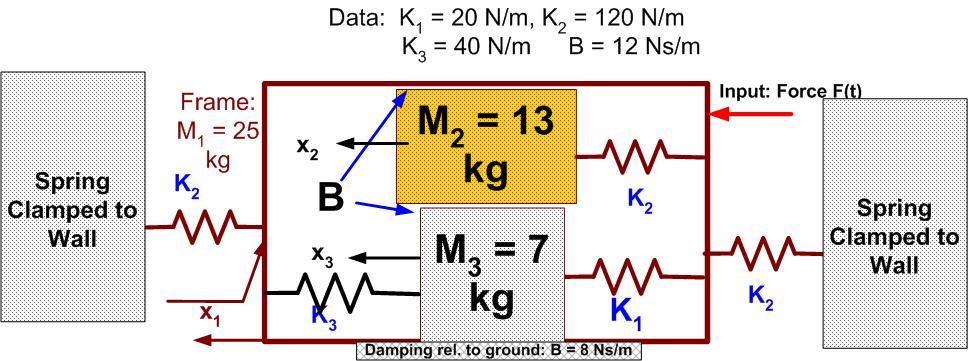
19 Input is force F(t). y (t) = displacement of mass m2. Inertia J1 is rolling only, no slipping relative to mass m2. Spring K3 is attached to center of Inertia J1. Data: Galli,Justin J 1 = 25 kgm 2, K 1 = K 2 =20 N/m, K 3 = 50 Nm/rad, b = 8 Ns/m, m1 = 15 kg m2 = 30 kg, r1= 1.5 m r2 = 0.3 m θ Ghanaatrad,R yan B
20 Input is force F(t). x (t) Gonzalez,Enri que L Input is torque T(t). Radius of Pulley : R = 0.5 m Hart,Dustin T Input is Force F(t) Pure rotation at inertia A. Center of A does not move. Hartman,Jessi ca N Herrera,Joshu a William Input is torque T(t). θ 4 N1 through N4 are the number of gear teeth given as: 12, 16, 20, 30 K 1 = 20 N/m, K 2 =30 Nm/rad, D = 50 Ns/m





. x(t)")













21 Data: J 5 = J 6 = 20 kg-m 2, J 1 = J2 = J 3 = J4 gears 1 through 4 inertia = 0.7 kg m 2 K 1 Input is torque T(t). x(t) k = 25 Nm/rad Lennon,Derek Litton,Kyle Torsional spring between N4 and Pinion gear: k = 19 Nm/rad Inertia at Pinion: J 4 = 4 kg-m 2 Force input is applied to right of uniform plate B, with dimensions 2m by 1.5 m. We wish to maintain the angle of rotation of B at zero. A unit disturbance step is applied at t=0 to the left side of plate B.
22 Input is armature voltage e a (t). x(t) Torsional spring between N2 and gear: k = 12 Nm/rad Inertia of Pinion Gear: J Gear = 12 kgm 2 k = 12 Nm/rad Magann,Brian Input is force f(t). x 2 (t) Monsalud,Dha ryl
23 y Mun,Bongjun Input is torque τa(t). x 3 (t) Nelson,Shelby E Data: J = 12 kg-m 2, K 1 = 25 Nm/rad, B = 20 Ns/m K 2 = K 3 =40 N/m R= 0.7 m, M= 30 kg
24 Input is torque τa(t). x(t) Data: J1 = 18 kgm 2, J2 = 25 kgm 2, K 1 = 20 Nm/rad, B = 30 Nms/rad K 2 = 35 N/m R= 0.5 m, M= 25 kg Orr,Katelyn Input T(t), θ 2 (t) Oslinker,Brian Matthew



























25 θ1(t) Poblete,Jonath an A Input is torque T(t). angular velocity ω 1 k = 20 Nm/rad Poon,Tik Ho Torsional spring between N1 and inertia to its left: k = 20 Nm/rad θ k = 20 Nm/rad Pratt,Timothy N


































26 Input is torque T(t). y Radius of inertia J 2 : R= 0.5 m Pulido,Jorge L θ Friction between Inertia J and Ground: B_ trans = 7 Ns/m Raj,Praveen θ Torsional Damping of Pendulum: B = 3 Nms/rad Rebman,Kyle W
































27 Reyburn,Matth ew H θ 2 Richardson IV,Norman E Input is force F(t). X 1 (t) = displacement of mass M 2. Ross,Stephani e









28 Ross,Tim W Assume small angles of rotation. Santos,Ronnie G
29 Schweter,Jona than M Ks1 = 15 N/m Kd2 = 8 Ns/m Silva,Daniel F

















30 Smith,Allan M Input is torque T(t). θ 3 (t) Stern,Jeremy T Sun,Hai Rui Contact Dr. Mauer for assignment
31 Viscous damping B is present in both inertiae J1 and J2: B = 20 Nms/rad Trabia,Sarah S Triay,Jose R Input is disturbance h(t) (road roughness) body tilt angle θ(t). Wheels are attached to Vargas,Sylvest the car mass through er Lirio spring and Data: M-body = 1200 kg, car body radius of gyration k = 1m C f = 2500 Ns/m C r = 2000 Ns/m, K f = =28000 N/m k r = N/m L f =0.9 m, L r =1.2 m

















32 damper. Use 2 wheels. M wheel = 25 kg Do not consider tire inertia. Suspension elasticity and damping are modeled by K and C as shown in the illustration Verdin,Bruno H Wheeler,Britta ny



















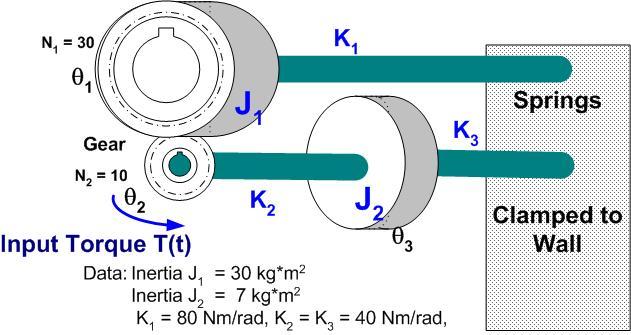
33 Input torque T(t) is applied at θ 2. Gear at θ 2 has no Inertia. θ 1 Damping at J2 is B = 7 Nms/rad Wu,Soloman G θ A Zeng,Zheng
Laboratory 11 Control Systems Laboratory ECE3557. State Feedback Controller for Position Control of a Flexible Joint
 Laboratory 11 State Feedback Controller for Position Control of a Flexible Joint 11.1 Objective The objective of this laboratory is to design a full state feedback controller for endpoint position control
Laboratory 11 State Feedback Controller for Position Control of a Flexible Joint 11.1 Objective The objective of this laboratory is to design a full state feedback controller for endpoint position control
Positioning Servo Design Example
 Positioning Servo Design Example 1 Goal. The goal in this design example is to design a control system that will be used in a pick-and-place robot to move the link of a robot between two positions. Usually
Positioning Servo Design Example 1 Goal. The goal in this design example is to design a control system that will be used in a pick-and-place robot to move the link of a robot between two positions. Usually
The basic principle to be used in mechanical systems to derive a mathematical model is Newton s law,
 Chapter. DYNAMIC MODELING Understanding the nature of the process to be controlled is a central issue for a control engineer. Thus the engineer must construct a model of the process with whatever information
Chapter. DYNAMIC MODELING Understanding the nature of the process to be controlled is a central issue for a control engineer. Thus the engineer must construct a model of the process with whatever information
MECH 3140 Final Project
 MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
AMME3500: System Dynamics & Control
 Stefan B. Williams May, 211 AMME35: System Dynamics & Control Assignment 4 Note: This assignment contributes 15% towards your final mark. This assignment is due at 4pm on Monday, May 3 th during Week 13
Stefan B. Williams May, 211 AMME35: System Dynamics & Control Assignment 4 Note: This assignment contributes 15% towards your final mark. This assignment is due at 4pm on Monday, May 3 th during Week 13
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Review
 Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
SRV02-Series Rotary Experiment # 1. Position Control. Student Handout
 SRV02-Series Rotary Experiment # 1 Position Control Student Handout SRV02-Series Rotary Experiment # 1 Position Control Student Handout 1. Objectives The objective in this experiment is to introduce the
SRV02-Series Rotary Experiment # 1 Position Control Student Handout SRV02-Series Rotary Experiment # 1 Position Control Student Handout 1. Objectives The objective in this experiment is to introduce the
Mechatronics Modeling and Analysis of Dynamic Systems Case-Study Exercise
 Mechatronics Modeling and Analysis of Dynamic Systems Case-Study Exercise Goal: This exercise is designed to take a real-world problem and apply the modeling and analysis concepts discussed in class. As
Mechatronics Modeling and Analysis of Dynamic Systems Case-Study Exercise Goal: This exercise is designed to take a real-world problem and apply the modeling and analysis concepts discussed in class. As
State Feedback Controller for Position Control of a Flexible Link
 Laboratory 12 Control Systems Laboratory ECE3557 Laboratory 12 State Feedback Controller for Position Control of a Flexible Link 12.1 Objective The objective of this laboratory is to design a full state
Laboratory 12 Control Systems Laboratory ECE3557 Laboratory 12 State Feedback Controller for Position Control of a Flexible Link 12.1 Objective The objective of this laboratory is to design a full state
Rotary Motion Servo Plant: SRV02. Rotary Experiment #11: 1-DOF Torsion. 1-DOF Torsion Position Control using QuaRC. Student Manual
 Rotary Motion Servo Plant: SRV02 Rotary Experiment #11: 1-DOF Torsion 1-DOF Torsion Position Control using QuaRC Student Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1 3. OVERVIEW OF
Rotary Motion Servo Plant: SRV02 Rotary Experiment #11: 1-DOF Torsion 1-DOF Torsion Position Control using QuaRC Student Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1 3. OVERVIEW OF
FEEDBACK CONTROL SYSTEMS
 FEEDBAC CONTROL SYSTEMS. Control System Design. Open and Closed-Loop Control Systems 3. Why Closed-Loop Control? 4. Case Study --- Speed Control of a DC Motor 5. Steady-State Errors in Unity Feedback Control
FEEDBAC CONTROL SYSTEMS. Control System Design. Open and Closed-Loop Control Systems 3. Why Closed-Loop Control? 4. Case Study --- Speed Control of a DC Motor 5. Steady-State Errors in Unity Feedback Control
Mechatronics. MANE 4490 Fall 2002 Assignment # 1
 Mechatronics MANE 4490 Fall 2002 Assignment # 1 1. For each of the physical models shown in Figure 1, derive the mathematical model (equation of motion). All displacements are measured from the static
Mechatronics MANE 4490 Fall 2002 Assignment # 1 1. For each of the physical models shown in Figure 1, derive the mathematical model (equation of motion). All displacements are measured from the static
Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2)
") Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2) For all calculations in this book, you can use the MathCad software or any other mathematical software that you are familiar
Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2) For all calculations in this book, you can use the MathCad software or any other mathematical software that you are familiar
Mechatronics Engineering. Li Wen
 Mechatronics Engineering Li Wen Bio-inspired robot-dc motor drive Unstable system Mirko Kovac,EPFL Modeling and simulation of the control system Problems 1. Why we establish mathematical model of the control
Mechatronics Engineering Li Wen Bio-inspired robot-dc motor drive Unstable system Mirko Kovac,EPFL Modeling and simulation of the control system Problems 1. Why we establish mathematical model of the control
Lab 3: Quanser Hardware and Proportional Control
 Lab 3: Quanser Hardware and Proportional Control The worst wheel of the cart makes the most noise. Benjamin Franklin 1 Objectives The goal of this lab is to: 1. familiarize you with Quanser s QuaRC tools
Lab 3: Quanser Hardware and Proportional Control The worst wheel of the cart makes the most noise. Benjamin Franklin 1 Objectives The goal of this lab is to: 1. familiarize you with Quanser s QuaRC tools
Position Control Experiment MAE171a
 Position Control Experiment MAE171a January 11, 014 Prof. R.A. de Callafon, Dept. of MAE, UCSD TAs: Jeff Narkis, email: jnarkis@ucsd.edu Gil Collins, email: gwcollin@ucsd.edu Contents 1 Aim and Procedure
Position Control Experiment MAE171a January 11, 014 Prof. R.A. de Callafon, Dept. of MAE, UCSD TAs: Jeff Narkis, email: jnarkis@ucsd.edu Gil Collins, email: gwcollin@ucsd.edu Contents 1 Aim and Procedure
2.004 Dynamics and Control II Spring 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.004 Dynamics and Control II Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Institute
MIT OpenCourseWare http://ocw.mit.edu 2.004 Dynamics and Control II Spring 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. Massachusetts Institute
CHAPTER 1 Basic Concepts of Control System. CHAPTER 6 Hydraulic Control System
 CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
CHAPTER 1 Basic Concepts of Control System 1. What is open loop control systems and closed loop control systems? Compare open loop control system with closed loop control system. Write down major advantages
The Control of an Inverted Pendulum
 The Control of an Inverted Pendulum AAE 364L This experiment is devoted to the inverted pendulum. Clearly, the inverted pendulum will fall without any control. We will design a controller to balance the
The Control of an Inverted Pendulum AAE 364L This experiment is devoted to the inverted pendulum. Clearly, the inverted pendulum will fall without any control. We will design a controller to balance the
Lab 3: Model based Position Control of a Cart
 I. Objective Lab 3: Model based Position Control of a Cart The goal of this lab is to help understand the methodology to design a controller using the given plant dynamics. Specifically, we would do position
I. Objective Lab 3: Model based Position Control of a Cart The goal of this lab is to help understand the methodology to design a controller using the given plant dynamics. Specifically, we would do position
Feedback Control Systems
 ME Homework #0 Feedback Control Systems Last Updated November 06 Text problem 67 (Revised Chapter 6 Homework Problems- attached) 65 Chapter 6 Homework Problems 65 Transient Response of a Second Order Model
ME Homework #0 Feedback Control Systems Last Updated November 06 Text problem 67 (Revised Chapter 6 Homework Problems- attached) 65 Chapter 6 Homework Problems 65 Transient Response of a Second Order Model
Dr Ian R. Manchester
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Lab 6a: Pole Placement for the Inverted Pendulum
 Lab 6a: Pole Placement for the Inverted Pendulum Idiot. Above her head was the only stable place in the cosmos, the only refuge from the damnation of the Panta Rei, and she guessed it was the Pendulum
Lab 6a: Pole Placement for the Inverted Pendulum Idiot. Above her head was the only stable place in the cosmos, the only refuge from the damnation of the Panta Rei, and she guessed it was the Pendulum
Coupled Drive Apparatus Modelling and Simulation
 University of Ljubljana Faculty of Electrical Engineering Victor Centellas Gil Coupled Drive Apparatus Modelling and Simulation Diploma thesis Menthor: prof. dr. Maja Atanasijević-Kunc Ljubljana, 2015
University of Ljubljana Faculty of Electrical Engineering Victor Centellas Gil Coupled Drive Apparatus Modelling and Simulation Diploma thesis Menthor: prof. dr. Maja Atanasijević-Kunc Ljubljana, 2015
Introduction to Control (034040) lecture no. 2
 lecture no. 2") Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
(Refer Slide Time: 00:01:30 min)
") Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Control Engineering Prof. M. Gopal Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 3 Introduction to Control Problem (Contd.) Well friends, I have been giving you various
Final Exam April 30, 2013
 Final Exam Instructions: You have 120 minutes to complete this exam. This is a closed-book, closed-notes exam. You are allowed to use a calculator during the exam. Usage of mobile phones and other electronic
Final Exam Instructions: You have 120 minutes to complete this exam. This is a closed-book, closed-notes exam. You are allowed to use a calculator during the exam. Usage of mobile phones and other electronic
Example: DC Motor Speed Modeling
 Page 1 of 5 Example: DC Motor Speed Modeling Physical setup and system equations Design requirements MATLAB representation and open-loop response Physical setup and system equations A common actuator in
Page 1 of 5 Example: DC Motor Speed Modeling Physical setup and system equations Design requirements MATLAB representation and open-loop response Physical setup and system equations A common actuator in
R10 JNTUWORLD B 1 M 1 K 2 M 2. f(t) Figure 1
 Figure 1") Code No: R06 R0 SET - II B. Tech II Semester Regular Examinations April/May 03 CONTROL SYSTEMS (Com. to EEE, ECE, EIE, ECC, AE) Time: 3 hours Max. Marks: 75 Answer any FIVE Questions All Questions carry
Code No: R06 R0 SET - II B. Tech II Semester Regular Examinations April/May 03 CONTROL SYSTEMS (Com. to EEE, ECE, EIE, ECC, AE) Time: 3 hours Max. Marks: 75 Answer any FIVE Questions All Questions carry
UNIVERSITY OF WASHINGTON Department of Aeronautics and Astronautics
 UNIVERSITY OF WASHINGTON Department of Aeronautics and Astronautics Modeling and Control of a Flexishaft System March 19, 2003 Christopher Lum Travis Reisner Amanda Stephens Brian Hass AA/EE-448 Controls
UNIVERSITY OF WASHINGTON Department of Aeronautics and Astronautics Modeling and Control of a Flexishaft System March 19, 2003 Christopher Lum Travis Reisner Amanda Stephens Brian Hass AA/EE-448 Controls
Inverted Pendulum. Objectives
 Inverted Pendulum Objectives The objective of this lab is to experiment with the stabilization of an unstable system. The inverted pendulum problem is taken as an example and the animation program gives
Inverted Pendulum Objectives The objective of this lab is to experiment with the stabilization of an unstable system. The inverted pendulum problem is taken as an example and the animation program gives
Real-Time Implementation of a LQR-Based Controller for the Stabilization of a Double Inverted Pendulum
 Proceedings of the International MultiConference of Engineers and Computer Scientists 017 Vol I,, March 15-17, 017, Hong Kong Real-Time Implementation of a LQR-Based Controller for the Stabilization of
Proceedings of the International MultiConference of Engineers and Computer Scientists 017 Vol I,, March 15-17, 017, Hong Kong Real-Time Implementation of a LQR-Based Controller for the Stabilization of
Digital Control Semester Project
 Digital Control Semester Project Part I: Transform-Based Design 1 Introduction For this project you will be designing a digital controller for a system which consists of a DC motor driving a shaft with
Digital Control Semester Project Part I: Transform-Based Design 1 Introduction For this project you will be designing a digital controller for a system which consists of a DC motor driving a shaft with
Laboratory handouts, ME 340
 Laboratory handouts, ME 340 This document contains summary theory, solved exercises, prelab assignments, lab instructions, and report assignments for Lab 4. 2014-2016 Harry Dankowicz, unless otherwise
Laboratory handouts, ME 340 This document contains summary theory, solved exercises, prelab assignments, lab instructions, and report assignments for Lab 4. 2014-2016 Harry Dankowicz, unless otherwise
Example: Modeling DC Motor Position Physical Setup System Equations Design Requirements MATLAB Representation and Open-Loop Response
 Page 1 of 5 Example: Modeling DC Motor Position Physical Setup System Equations Design Requirements MATLAB Representation and Open-Loop Response Physical Setup A common actuator in control systems is the
Page 1 of 5 Example: Modeling DC Motor Position Physical Setup System Equations Design Requirements MATLAB Representation and Open-Loop Response Physical Setup A common actuator in control systems is the
Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #02: DC Motor Position Control. DC Motor Control Trainer (DCMCT) Student Manual
 Series: QNET Experiment #02: DC Motor Position Control. DC Motor Control Trainer (DCMCT) Student Manual") Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #02: DC Motor Position Control DC Motor Control Trainer (DCMCT) Student Manual Table of Contents 1 Laboratory Objectives1 2 References1 3 DCMCT Plant
Quanser NI-ELVIS Trainer (QNET) Series: QNET Experiment #02: DC Motor Position Control DC Motor Control Trainer (DCMCT) Student Manual Table of Contents 1 Laboratory Objectives1 2 References1 3 DCMCT Plant
D(s) G(s) A control system design definition
 G(s) A control system design definition") R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
Lab 1: Dynamic Simulation Using Simulink and Matlab
 Lab 1: Dynamic Simulation Using Simulink and Matlab Objectives In this lab you will learn how to use a program called Simulink to simulate dynamic systems. Simulink runs under Matlab and uses block diagrams
Lab 1: Dynamic Simulation Using Simulink and Matlab Objectives In this lab you will learn how to use a program called Simulink to simulate dynamic systems. Simulink runs under Matlab and uses block diagrams
Lab 5a: Pole Placement for the Inverted Pendulum
 Lab 5a: Pole Placement for the Inverted Pendulum November 1, 2011 1 Purpose The objective of this lab is to achieve simultaneous control of both the angular position of the pendulum and horizontal position
Lab 5a: Pole Placement for the Inverted Pendulum November 1, 2011 1 Purpose The objective of this lab is to achieve simultaneous control of both the angular position of the pendulum and horizontal position
DC Motor Position: System Modeling
 1 of 7 01/03/2014 22:07 Tips Effects TIPS ABOUT BASICS INDEX NEXT INTRODUCTION CRUISE CONTROL MOTOR SPEED MOTOR POSITION SUSPENSION INVERTED PENDULUM SYSTEM MODELING ANALYSIS DC Motor Position: System
1 of 7 01/03/2014 22:07 Tips Effects TIPS ABOUT BASICS INDEX NEXT INTRODUCTION CRUISE CONTROL MOTOR SPEED MOTOR POSITION SUSPENSION INVERTED PENDULUM SYSTEM MODELING ANALYSIS DC Motor Position: System
Video 5.1 Vijay Kumar and Ani Hsieh
 Video 5.1 Vijay Kumar and Ani Hsieh Robo3x-1.1 1 The Purpose of Control Input/Stimulus/ Disturbance System or Plant Output/ Response Understand the Black Box Evaluate the Performance Change the Behavior
Video 5.1 Vijay Kumar and Ani Hsieh Robo3x-1.1 1 The Purpose of Control Input/Stimulus/ Disturbance System or Plant Output/ Response Understand the Black Box Evaluate the Performance Change the Behavior
State Feedback MAE 433 Spring 2012 Lab 7
 State Feedback MAE 433 Spring 1 Lab 7 Prof. C. Rowley and M. Littman AIs: Brandt Belson, onathan Tu Princeton University April 4-7, 1 1 Overview This lab addresses the control of an inverted pendulum balanced
State Feedback MAE 433 Spring 1 Lab 7 Prof. C. Rowley and M. Littman AIs: Brandt Belson, onathan Tu Princeton University April 4-7, 1 1 Overview This lab addresses the control of an inverted pendulum balanced
Department of Electrical and Computer Engineering. EE461: Digital Control - Lab Manual
 Department of Electrical and Computer Engineering EE461: Digital Control - Lab Manual Winter 2011 EE 461 Experiment #1 Digital Control of DC Servomotor 1 Objectives The objective of this lab is to introduce
Department of Electrical and Computer Engineering EE461: Digital Control - Lab Manual Winter 2011 EE 461 Experiment #1 Digital Control of DC Servomotor 1 Objectives The objective of this lab is to introduce
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Root Locus
 Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Week Content Notes 1 Introduction 2 Frequency Domain Modelling 3 Transient Performance and the s-plane 4 Block Diagrams 5 Feedback System Characteristics Assign 1 Due 6 Root Locus 7 Root Locus 2 Assign
Lab #2: Digital Simulation of Torsional Disk Systems in LabVIEW
 Lab #2: Digital Simulation of Torsional Disk Systems in LabVIEW Objective The purpose of this lab is to increase your familiarity with LabVIEW, increase your mechanical modeling prowess, and give you simulation
Lab #2: Digital Simulation of Torsional Disk Systems in LabVIEW Objective The purpose of this lab is to increase your familiarity with LabVIEW, increase your mechanical modeling prowess, and give you simulation
Control of Manufacturing Processes
 Control of Manufacturing Processes Subject 2.830 Spring 2004 Lecture #18 Basic Control Loop Analysis" April 15, 2004 Revisit Temperature Control Problem τ dy dt + y = u τ = time constant = gain y ss =
Control of Manufacturing Processes Subject 2.830 Spring 2004 Lecture #18 Basic Control Loop Analysis" April 15, 2004 Revisit Temperature Control Problem τ dy dt + y = u τ = time constant = gain y ss =
Introduction to Controls
 EE 474 Review Exam 1 Name Answer each of the questions. Show your work. Note were essay-type answers are requested. Answer with complete sentences. Incomplete sentences will count heavily against the grade.
EE 474 Review Exam 1 Name Answer each of the questions. Show your work. Note were essay-type answers are requested. Answer with complete sentences. Incomplete sentences will count heavily against the grade.
Course Summary. The course cannot be summarized in one lecture.
 Course Summary Unit 1: Introduction Unit 2: Modeling in the Frequency Domain Unit 3: Time Response Unit 4: Block Diagram Reduction Unit 5: Stability Unit 6: Steady-State Error Unit 7: Root Locus Techniques
Course Summary Unit 1: Introduction Unit 2: Modeling in the Frequency Domain Unit 3: Time Response Unit 4: Block Diagram Reduction Unit 5: Stability Unit 6: Steady-State Error Unit 7: Root Locus Techniques
1 x(k +1)=(Φ LH) x(k) = T 1 x 2 (k) x1 (0) 1 T x 2(0) T x 1 (0) x 2 (0) x(1) = x(2) = x(3) =
=(Φ LH) x(k) = T 1 x 2 (k) x1 (0) 1 T x 2(0) T x 1 (0) x 2 (0) x(1) = x(2) = x(3) =") 567 This is often referred to as Þnite settling time or deadbeat design because the dynamics will settle in a Þnite number of sample periods. This estimator always drives the error to zero in time 2T or
567 This is often referred to as Þnite settling time or deadbeat design because the dynamics will settle in a Þnite number of sample periods. This estimator always drives the error to zero in time 2T or
Department of Mechanical Engineering
 Department of Mechanical Engineering 2.010 CONTROL SYSTEMS PRINCIPLES Laboratory 2: Characterization of the Electro-Mechanical Plant Introduction: It is important (for future lab sessions) that we have
Department of Mechanical Engineering 2.010 CONTROL SYSTEMS PRINCIPLES Laboratory 2: Characterization of the Electro-Mechanical Plant Introduction: It is important (for future lab sessions) that we have
Control of Manufacturing Processes
 Control of Manufacturing Processes Subject 2.830 Spring 2004 Lecture #19 Position Control and Root Locus Analysis" April 22, 2004 The Position Servo Problem, reference position NC Control Robots Injection
Control of Manufacturing Processes Subject 2.830 Spring 2004 Lecture #19 Position Control and Root Locus Analysis" April 22, 2004 The Position Servo Problem, reference position NC Control Robots Injection
EE 380 EXAM II 3 November 2011 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO
: First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO") EE 380 EXAM II 3 November 2011 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
EE 380 EXAM II 3 November 2011 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
ECEN 420 LINEAR CONTROL SYSTEMS. Lecture 6 Mathematical Representation of Physical Systems II 1/67
 1/67 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 6 Mathematical Representation of Physical Systems II State Variable Models for Dynamic Systems u 1 u 2 u ṙ. Internal Variables x 1, x 2 x n y 1 y 2. y m Figure
1/67 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 6 Mathematical Representation of Physical Systems II State Variable Models for Dynamic Systems u 1 u 2 u ṙ. Internal Variables x 1, x 2 x n y 1 y 2. y m Figure
Lab 4 Numerical simulation of a crane
 Lab 4 Numerical simulation of a crane Agenda Time 10 min Item Review agenda Introduce the crane problem 95 min Lab activity I ll try to give you a 5- minute warning before the end of the lab period to
Lab 4 Numerical simulation of a crane Agenda Time 10 min Item Review agenda Introduce the crane problem 95 min Lab activity I ll try to give you a 5- minute warning before the end of the lab period to
A SHORT INTRODUCTION TO ADAMS
 A. AHADI, P. LIDSTRÖM, K. NILSSON A SHORT INTRODUCTION TO ADAMS FOR MECHANICAL ENGINEERS DIVISION OF MECHANICS DEPARTMENT OF MECHANICAL ENGINEERING LUND INSTITUTE OF TECHNOLOGY 2017 1 FOREWORD THESE EXERCISES
A. AHADI, P. LIDSTRÖM, K. NILSSON A SHORT INTRODUCTION TO ADAMS FOR MECHANICAL ENGINEERS DIVISION OF MECHANICS DEPARTMENT OF MECHANICAL ENGINEERING LUND INSTITUTE OF TECHNOLOGY 2017 1 FOREWORD THESE EXERCISES
University of Alberta ENGM 541: Modeling and Simulation of Engineering Systems Laboratory #7. M.G. Lipsett & M. Mashkournia 2011
 ENG M 54 Laboratory #7 University of Alberta ENGM 54: Modeling and Simulation of Engineering Systems Laboratory #7 M.G. Lipsett & M. Mashkournia 2 Mixed Systems Modeling with MATLAB & SIMULINK Mixed systems
ENG M 54 Laboratory #7 University of Alberta ENGM 54: Modeling and Simulation of Engineering Systems Laboratory #7 M.G. Lipsett & M. Mashkournia 2 Mixed Systems Modeling with MATLAB & SIMULINK Mixed systems
The Control of an Inverted Pendulum
 The Control of an Inverted Pendulum AAE 364L This experiment is devoted to the inverted pendulum. Clearly, the inverted pendulum will fall without any control. We will design a controller to balance the
The Control of an Inverted Pendulum AAE 364L This experiment is devoted to the inverted pendulum. Clearly, the inverted pendulum will fall without any control. We will design a controller to balance the
Dynamics and control of mechanical systems
 Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
Dynamics and control of mechanical systems Date Day 1 (03/05) - 05/05 Day 2 (07/05) Day 3 (09/05) Day 4 (11/05) Day 5 (14/05) Day 6 (16/05) Content Review of the basics of mechanics. Kinematics of rigid
TOPIC E: OSCILLATIONS EXAMPLES SPRING Q1. Find general solutions for the following differential equations:
 TOPIC E: OSCILLATIONS EXAMPLES SPRING 2019 Mathematics of Oscillating Systems Q1. Find general solutions for the following differential equations: Undamped Free Vibration Q2. A 4 g mass is suspended by
TOPIC E: OSCILLATIONS EXAMPLES SPRING 2019 Mathematics of Oscillating Systems Q1. Find general solutions for the following differential equations: Undamped Free Vibration Q2. A 4 g mass is suspended by
ECE 320 Linear Control Systems Winter Lab 1 Time Domain Analysis of a 1DOF Rectilinear System
 Amplitude ECE 3 Linear Control Systems Winter - Lab Time Domain Analysis of a DOF Rectilinear System Objective: Become familiar with the ECP control system and MATLAB interface Collect experimental data
Amplitude ECE 3 Linear Control Systems Winter - Lab Time Domain Analysis of a DOF Rectilinear System Objective: Become familiar with the ECP control system and MATLAB interface Collect experimental data
The control of a gantry
 The control of a gantry AAE 364L In this experiment we will design a controller for a gantry or crane. Without a controller the pendulum of crane will swing for a long time. The idea is to use control
The control of a gantry AAE 364L In this experiment we will design a controller for a gantry or crane. Without a controller the pendulum of crane will swing for a long time. The idea is to use control
Bangladesh University of Engineering and Technology. EEE 402: Control System I Laboratory
 Bangladesh University of Engineering and Technology Electrical and Electronic Engineering Department EEE 402: Control System I Laboratory Experiment No. 4 a) Effect of input waveform, loop gain, and system
Bangladesh University of Engineering and Technology Electrical and Electronic Engineering Department EEE 402: Control System I Laboratory Experiment No. 4 a) Effect of input waveform, loop gain, and system
Implementation Issues for the Virtual Spring
 Implementation Issues for the Virtual Spring J. S. Freudenberg EECS 461 Embedded Control Systems 1 Introduction One of the tasks in Lab 4 is to attach the haptic wheel to a virtual reference position with
Implementation Issues for the Virtual Spring J. S. Freudenberg EECS 461 Embedded Control Systems 1 Introduction One of the tasks in Lab 4 is to attach the haptic wheel to a virtual reference position with
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering 2.04A Systems and Controls Spring 2013
 MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering 2.04A Systems and Controls Spring 2013 Problem Set #4 Posted: Thursday, Mar. 7, 13 Due: Thursday, Mar. 14, 13 1. Sketch the Root
MASSACHUSETTS INSTITUTE OF TECHNOLOGY Department of Mechanical Engineering 2.04A Systems and Controls Spring 2013 Problem Set #4 Posted: Thursday, Mar. 7, 13 Due: Thursday, Mar. 14, 13 1. Sketch the Root
Application Note #3413
 Application Note #3413 Manual Tuning Methods Tuning the controller seems to be a difficult task to some users; however, after getting familiar with the theories and tricks behind it, one might find the
Application Note #3413 Manual Tuning Methods Tuning the controller seems to be a difficult task to some users; however, after getting familiar with the theories and tricks behind it, one might find the
Texas A & M University Department of Mechanical Engineering MEEN 364 Dynamic Systems and Controls Dr. Alexander G. Parlos
 Texas A & M University Department of Mechanical Engineering MEEN 364 Dynamic Systems and Controls Dr. Alexander G. Parlos Lecture 6: Modeling of Electromechanical Systems Principles of Motor Operation
Texas A & M University Department of Mechanical Engineering MEEN 364 Dynamic Systems and Controls Dr. Alexander G. Parlos Lecture 6: Modeling of Electromechanical Systems Principles of Motor Operation
Contents. Dynamics and control of mechanical systems. Focus on
 Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
Dynamics and control of mechanical systems Date Day 1 (01/08) Day 2 (03/08) Day 3 (05/08) Day 4 (07/08) Day 5 (09/08) Day 6 (11/08) Content Review of the basics of mechanics. Kinematics of rigid bodies
MAS107 Control Theory Exam Solutions 2008
 MAS07 CONTROL THEORY. HOVLAND: EXAM SOLUTION 2008 MAS07 Control Theory Exam Solutions 2008 Geir Hovland, Mechatronics Group, Grimstad, Norway June 30, 2008 C. Repeat question B, but plot the phase curve
MAS07 CONTROL THEORY. HOVLAND: EXAM SOLUTION 2008 MAS07 Control Theory Exam Solutions 2008 Geir Hovland, Mechatronics Group, Grimstad, Norway June 30, 2008 C. Repeat question B, but plot the phase curve
ENGG4420 LECTURE 7. CHAPTER 1 BY RADU MURESAN Page 1. September :29 PM
 CHAPTER 1 BY RADU MURESAN Page 1 ENGG4420 LECTURE 7 September 21 10 2:29 PM MODELS OF ELECTRIC CIRCUITS Electric circuits contain sources of electric voltage and current and other electronic elements such
CHAPTER 1 BY RADU MURESAN Page 1 ENGG4420 LECTURE 7 September 21 10 2:29 PM MODELS OF ELECTRIC CIRCUITS Electric circuits contain sources of electric voltage and current and other electronic elements such
SRV02-Series Rotary Experiment # 7. Rotary Inverted Pendulum. Student Handout
 SRV02-Series Rotary Experiment # 7 Rotary Inverted Pendulum Student Handout SRV02-Series Rotary Experiment # 7 Rotary Inverted Pendulum Student Handout 1. Objectives The objective in this experiment is
SRV02-Series Rotary Experiment # 7 Rotary Inverted Pendulum Student Handout SRV02-Series Rotary Experiment # 7 Rotary Inverted Pendulum Student Handout 1. Objectives The objective in this experiment is
Introduction to Feedback Control
 Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Due Wednesday, February 6th EE/MFS 599 HW #5
 Due Wednesday, February 6th EE/MFS 599 HW #5 You may use Matlab/Simulink wherever applicable. Consider the standard, unity-feedback closed loop control system shown below where G(s) = /[s q (s+)(s+9)]
Due Wednesday, February 6th EE/MFS 599 HW #5 You may use Matlab/Simulink wherever applicable. Consider the standard, unity-feedback closed loop control system shown below where G(s) = /[s q (s+)(s+9)]
Index. Index. More information. in this web service Cambridge University Press
 A-type elements, 4 7, 18, 31, 168, 198, 202, 219, 220, 222, 225 A-type variables. See Across variable ac current, 172, 251 ac induction motor, 251 Acceleration rotational, 30 translational, 16 Accumulator,
A-type elements, 4 7, 18, 31, 168, 198, 202, 219, 220, 222, 225 A-type variables. See Across variable ac current, 172, 251 ac induction motor, 251 Acceleration rotational, 30 translational, 16 Accumulator,
CYBER EXPLORATION LABORATORY EXPERIMENTS
 CYBER EXPLORATION LABORATORY EXPERIMENTS 1 2 Cyber Exploration oratory Experiments Chapter 2 Experiment 1 Objectives To learn to use MATLAB to: (1) generate polynomial, (2) manipulate polynomials, (3)
CYBER EXPLORATION LABORATORY EXPERIMENTS 1 2 Cyber Exploration oratory Experiments Chapter 2 Experiment 1 Objectives To learn to use MATLAB to: (1) generate polynomial, (2) manipulate polynomials, (3)
Inverted Pendulum System
 Introduction Inverted Pendulum System This lab experiment consists of two experimental procedures, each with sub parts. Experiment 1 is used to determine the system parameters needed to implement a controller.
Introduction Inverted Pendulum System This lab experiment consists of two experimental procedures, each with sub parts. Experiment 1 is used to determine the system parameters needed to implement a controller.
ECEn 483 / ME 431 Case Studies. Randal W. Beard Brigham Young University
 ECEn 483 / ME 431 Case Studies Randal W. Beard Brigham Young University Updated: December 2, 2014 ii Contents 1 Single Link Robot Arm 1 2 Pendulum on a Cart 9 3 Satellite Attitude Control 17 4 UUV Roll
ECEn 483 / ME 431 Case Studies Randal W. Beard Brigham Young University Updated: December 2, 2014 ii Contents 1 Single Link Robot Arm 1 2 Pendulum on a Cart 9 3 Satellite Attitude Control 17 4 UUV Roll
System Modeling: Motor position, θ The physical parameters for the dc motor are:
 Dept. of EEE, KUET, Sessional on EE 3202: Expt. # 2 2k15 Batch Experiment No. 02 Name of the experiment: Modeling of Physical systems and study of their closed loop response Objective: (i) (ii) (iii) (iv)
Dept. of EEE, KUET, Sessional on EE 3202: Expt. # 2 2k15 Batch Experiment No. 02 Name of the experiment: Modeling of Physical systems and study of their closed loop response Objective: (i) (ii) (iii) (iv)
ECSE 4962 Control Systems Design. A Brief Tutorial on Control Design
 ECSE 4962 Control Systems Design A Brief Tutorial on Control Design Instructor: Professor John T. Wen TA: Ben Potsaid http://www.cat.rpi.edu/~wen/ecse4962s04/ Don t Wait Until The Last Minute! You got
ECSE 4962 Control Systems Design A Brief Tutorial on Control Design Instructor: Professor John T. Wen TA: Ben Potsaid http://www.cat.rpi.edu/~wen/ecse4962s04/ Don t Wait Until The Last Minute! You got
CALIFORNIA INSTITUTE OF TECHNOLOGY Control and Dynamical Systems
 R. M. Murray Fall 2004 CALIFORNIA INSTITUTE OF TECHNOLOGY Control and Dynamical Systems CDS 101/110 Homework Set #2 Issued: 4 Oct 04 Due: 11 Oct 04 Note: In the upper left hand corner of the first page
R. M. Murray Fall 2004 CALIFORNIA INSTITUTE OF TECHNOLOGY Control and Dynamical Systems CDS 101/110 Homework Set #2 Issued: 4 Oct 04 Due: 11 Oct 04 Note: In the upper left hand corner of the first page
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING
 KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING QUESTION BANK SUB.NAME : CONTROL SYSTEMS BRANCH : ECE YEAR : II SEMESTER: IV 1. What is control system? 2. Define open
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING QUESTION BANK SUB.NAME : CONTROL SYSTEMS BRANCH : ECE YEAR : II SEMESTER: IV 1. What is control system? 2. Define open
Manufacturing Equipment Control
 QUESTION 1 An electric drive spindle has the following parameters: J m = 2 1 3 kg m 2, R a = 8 Ω, K t =.5 N m/a, K v =.5 V/(rad/s), K a = 2, J s = 4 1 2 kg m 2, and K s =.3. Ignore electrical dynamics
QUESTION 1 An electric drive spindle has the following parameters: J m = 2 1 3 kg m 2, R a = 8 Ω, K t =.5 N m/a, K v =.5 V/(rad/s), K a = 2, J s = 4 1 2 kg m 2, and K s =.3. Ignore electrical dynamics
University of Utah Electrical & Computer Engineering Department ECE 3510 Lab 9 Inverted Pendulum
 University of Utah Electrical & Computer Engineering Department ECE 3510 Lab 9 Inverted Pendulum p1 ECE 3510 Lab 9, Inverted Pendulum M. Bodson, A. Stolp, 4/2/13 rev, 4/9/13 Objectives The objective of
University of Utah Electrical & Computer Engineering Department ECE 3510 Lab 9 Inverted Pendulum p1 ECE 3510 Lab 9, Inverted Pendulum M. Bodson, A. Stolp, 4/2/13 rev, 4/9/13 Objectives The objective of
Laboratory handout 5 Mode shapes and resonance
 laboratory handouts, me 34 82 Laboratory handout 5 Mode shapes and resonance In this handout, material and assignments marked as optional can be skipped when preparing for the lab, but may provide a useful
laboratory handouts, me 34 82 Laboratory handout 5 Mode shapes and resonance In this handout, material and assignments marked as optional can be skipped when preparing for the lab, but may provide a useful
Electrical Machine & Automatic Control (EEE-409) (ME-II Yr) UNIT-3 Content: Signals u(t) = 1 when t 0 = 0 when t <0
 (ME-II Yr) UNIT-3 Content: Signals u(t) = 1 when t 0 = 0 when t <0") Electrical Machine & Automatic Control (EEE-409) (ME-II Yr) UNIT-3 Content: Modeling of Mechanical : linear mechanical elements, force-voltage and force current analogy, and electrical analog of simple
Electrical Machine & Automatic Control (EEE-409) (ME-II Yr) UNIT-3 Content: Modeling of Mechanical : linear mechanical elements, force-voltage and force current analogy, and electrical analog of simple
Industrial Servo System
 Industrial Servo System Introduction The goal of this lab is to investigate how the dynamic response of a closed-loop system can be used to estimate the mass moment of inertia. The investigation will require
Industrial Servo System Introduction The goal of this lab is to investigate how the dynamic response of a closed-loop system can be used to estimate the mass moment of inertia. The investigation will require
Massachusetts Institute of Technology Department of Mechanical Engineering Dynamics and Control II Design Project
 Massachusetts Institute of Technology Department of Mechanical Engineering.4 Dynamics and Control II Design Project ACTIVE DAMPING OF TALL BUILDING VIBRATIONS: CONTINUED Franz Hover, 5 November 7 Review
Massachusetts Institute of Technology Department of Mechanical Engineering.4 Dynamics and Control II Design Project ACTIVE DAMPING OF TALL BUILDING VIBRATIONS: CONTINUED Franz Hover, 5 November 7 Review
PLANAR KINETICS OF A RIGID BODY: WORK AND ENERGY Today s Objectives: Students will be able to: 1. Define the various ways a force and couple do work.
 PLANAR KINETICS OF A RIGID BODY: WORK AND ENERGY Today s Objectives: Students will be able to: 1. Define the various ways a force and couple do work. In-Class Activities: 2. Apply the principle of work
PLANAR KINETICS OF A RIGID BODY: WORK AND ENERGY Today s Objectives: Students will be able to: 1. Define the various ways a force and couple do work. In-Class Activities: 2. Apply the principle of work
PID Control. Objectives
 PID Control Objectives The objective of this lab is to study basic design issues for proportional-integral-derivative control laws. Emphasis is placed on transient responses and steady-state errors. The
PID Control Objectives The objective of this lab is to study basic design issues for proportional-integral-derivative control laws. Emphasis is placed on transient responses and steady-state errors. The
Control of Electromechanical Systems
 Control of Electromechanical Systems November 3, 27 Exercise Consider the feedback control scheme of the motor speed ω in Fig., where the torque actuation includes a time constant τ A =. s and a disturbance
Control of Electromechanical Systems November 3, 27 Exercise Consider the feedback control scheme of the motor speed ω in Fig., where the torque actuation includes a time constant τ A =. s and a disturbance
Controls Problems for Qualifying Exam - Spring 2014
 Controls Problems for Qualifying Exam - Spring 2014 Problem 1 Consider the system block diagram given in Figure 1. Find the overall transfer function T(s) = C(s)/R(s). Note that this transfer function
Controls Problems for Qualifying Exam - Spring 2014 Problem 1 Consider the system block diagram given in Figure 1. Find the overall transfer function T(s) = C(s)/R(s). Note that this transfer function
(b) A unity feedback system is characterized by the transfer function. Design a suitable compensator to meet the following specifications:
 A unity feedback system is characterized by the transfer function. Design a suitable compensator to meet the following specifications:") 1. (a) The open loop transfer function of a unity feedback control system is given by G(S) = K/S(1+0.1S)(1+S) (i) Determine the value of K so that the resonance peak M r of the system is equal to 1.4.
1. (a) The open loop transfer function of a unity feedback control system is given by G(S) = K/S(1+0.1S)(1+S) (i) Determine the value of K so that the resonance peak M r of the system is equal to 1.4.
Vibrations Qualifying Exam Study Material
 Vibrations Qualifying Exam Study Material The candidate is expected to have a thorough understanding of engineering vibrations topics. These topics are listed below for clarification. Not all instructors
Vibrations Qualifying Exam Study Material The candidate is expected to have a thorough understanding of engineering vibrations topics. These topics are listed below for clarification. Not all instructors
Contents. PART I METHODS AND CONCEPTS 2. Transfer Function Approach Frequency Domain Representations... 42
 Contents Preface.............................................. xiii 1. Introduction......................................... 1 1.1 Continuous and Discrete Control Systems................. 4 1.2 Open-Loop
Contents Preface.............................................. xiii 1. Introduction......................................... 1 1.1 Continuous and Discrete Control Systems................. 4 1.2 Open-Loop
THE REACTION WHEEL PENDULUM
 THE REACTION WHEEL PENDULUM By Ana Navarro Yu-Han Sun Final Report for ECE 486, Control Systems, Fall 2013 TA: Dan Soberal 16 December 2013 Thursday 3-6pm Contents 1. Introduction... 1 1.1 Sensors (Encoders)...
THE REACTION WHEEL PENDULUM By Ana Navarro Yu-Han Sun Final Report for ECE 486, Control Systems, Fall 2013 TA: Dan Soberal 16 December 2013 Thursday 3-6pm Contents 1. Introduction... 1 1.1 Sensors (Encoders)...
DSC HW 4: Assigned 7/9/11, Due 7/18/12 Page 1
 DSC HW 4: Assigned 7/9/11, Due 7/18/12 Page 1 A schematic for a small laboratory electromechanical shaker is shown below, along with a bond graph that can be used for initial modeling studies. Our intent
DSC HW 4: Assigned 7/9/11, Due 7/18/12 Page 1 A schematic for a small laboratory electromechanical shaker is shown below, along with a bond graph that can be used for initial modeling studies. Our intent
Linear Control Systems Solution to Assignment #1
 Linear Control Systems Solution to Assignment # Instructor: H. Karimi Issued: Mehr 0, 389 Due: Mehr 8, 389 Solution to Exercise. a) Using the superposition property of linear systems we can compute the
Linear Control Systems Solution to Assignment # Instructor: H. Karimi Issued: Mehr 0, 389 Due: Mehr 8, 389 Solution to Exercise. a) Using the superposition property of linear systems we can compute the
SAMPLE SOLUTION TO EXAM in MAS501 Control Systems 2 Autumn 2015
 FACULTY OF ENGINEERING AND SCIENCE SAMPLE SOLUTION TO EXAM in MAS501 Control Systems 2 Autumn 2015 Lecturer: Michael Ruderman Problem 1: Frequency-domain analysis and control design (15 pt) Given is a
FACULTY OF ENGINEERING AND SCIENCE SAMPLE SOLUTION TO EXAM in MAS501 Control Systems 2 Autumn 2015 Lecturer: Michael Ruderman Problem 1: Frequency-domain analysis and control design (15 pt) Given is a
Chapter three. Mathematical Modeling of mechanical end electrical systems. Laith Batarseh
 Chapter three Mathematical Modeling of mechanical end electrical systems Laith Batarseh 1 Next Previous Mathematical Modeling of mechanical end electrical systems Dynamic system modeling Definition of
Chapter three Mathematical Modeling of mechanical end electrical systems Laith Batarseh 1 Next Previous Mathematical Modeling of mechanical end electrical systems Dynamic system modeling Definition of
Linear Systems Theory
 ME 3253 Linear Systems Theory Review Class Overview and Introduction 1. How to build dynamic system model for physical system? 2. How to analyze the dynamic system? -- Time domain -- Frequency domain (Laplace
ME 3253 Linear Systems Theory Review Class Overview and Introduction 1. How to build dynamic system model for physical system? 2. How to analyze the dynamic system? -- Time domain -- Frequency domain (Laplace
Rotary Motion Servo Plant: SRV02. Rotary Experiment #01: Modeling. SRV02 Modeling using QuaRC. Student Manual
 Rotary Motion Servo Plant: SRV02 Rotary Experiment #01: Modeling SRV02 Modeling using QuaRC Student Manual SRV02 Modeling Laboratory Student Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1
Rotary Motion Servo Plant: SRV02 Rotary Experiment #01: Modeling SRV02 Modeling using QuaRC Student Manual SRV02 Modeling Laboratory Student Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1