12/20/2017. Lectures on Signals & systems Engineering. Designed and Presented by Dr. Ayman Elshenawy Elsefy
|
|
|
- Linda Snow
- 5 years ago
- Views:
Transcription


1 //7 ectures on Signals & systems Engineering Designed and Presented by Dr. Ayman Elshenawy Elsefy Dept. of Systems & Computer Eng. Al-Azhar University eaymanelshenawy@yahoo.com aplace Transform Applications x t = e at u t, a >, a R X S = + x t e st dt = = + + e at u t e st dt = e at e st dt + e (s+a)t dt = s + a e s+a e s+a = s + a =, Re s > a s + a

t dt =")

2 //7 x t = e at u t, a > + X S = x t e st dt + = e at u t e st dt = e at e st dt = e (s+a)t dt = s + a e s+a e s+a = s + a =, Re s < a s + a
 = If z is a zero, then X z = Poles of the aplace transform D(s) = p = then X p = Region of Convergence ROC Region of")
3 //7 Zeroes and Poles of rational aplace transform Zeroes and Poles of rational aplace transform N(s) X s = D(s) Zeroes of the aplace transform N(s) = If z is a zero, then X z = Poles of the aplace transform D(s) = p = then X p = Region of Convergence ROC Region of Convergence ROC 3
4 //7 Region of Convergence ROC Basic aplace Pairs xt X s t ut ut s s s a s a Poles ROC none Res s s Re s Re s e ut Re s a s a e at u t Res a s a t Res t Res u s u t Res e t u at e u t s a s at s a Re Re s s a a Example 9.3 Xs s Res X s s s Res X s Xs X s s t x t e u t Res j j j 5 6 4
5 // Time Shifting Shifting in s-domain xt X s st xt t X se Roc R Roc R xt X s st xt e X s s Roc R Roc R Res Example xt t kt k X s e st Res j T j T j pole-zero plot r j r r Res r r Re s j ROC r Res r Res Res r Res 7 8 Convolution Property Convolution Property x t X s Roc R xt X s Roc R x t xt XsX s Roc R R s Xs s Res s X s s Res X sx s Res x t xt t 9 5
6 //7 Example x t e ut x t e ut x t x t? t 3t 3 t x 5 t t t x t e ut e u Differentiation in the Time Domain xt Example Determine X s dxt sxs dt X s xt Roc R 4 Roc R s e e X s Xs X s s s e Res s 6 8 t Differentiation in the s-domain xt X s dx s tx t ds at te ut s a t e ut s a 3 at Roc R Roc R Res a Res a 9.7 Analysis and Characterization of TI Systems Using the aplace Transform t xt ht y Y s X sh s H s xt X s ht Hs yt Ys System Function or Transfer Function 3 4 6


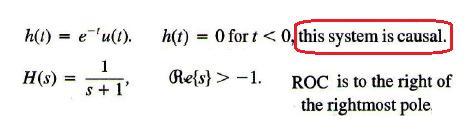
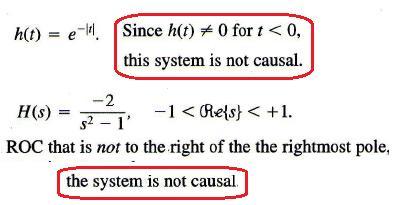

7 //7 Causality of TI Stability of TI 7
8 //7 s Hs s s a Res Causal, unstable system j j Transfer Function of the system TI Systems Characterized by inear Constant-Coefficient Differential Equations d y t N k M ak k k dt k k d x bk k dt t Y s H s X s M k N k k bk s ROC k a s k b - Res noncausal, stable system dyt 3yt xt dt c Res anticausal, unstable system j 9 3 Example Consider a causal TI system whose input and output related through an linear constant-coefficient differential equation of the form x t yt 3 y t y t y t x t Determine the unit step response of the system. t t s t e e u t H s s / C R / s / C 3 3 8
9 //7 Example 9.5 Consider an TI system with input x t e u, t 3t Output t t y t e e u t. (a) Determine the system function. (b) Justify the properties of the system. (c) Determine the differential equation of the system. s 3 H s Res - s s Example Consider a causal TI system, t t. xt e - t yt e - t 6 dht 4t. ht e ut but b unknown constant dt Hs Determine the system function and b. H s Res s s y t y t y t x t x t System Functions for Interconnections of TI Systems System Functions for Interconnections of TI Systems 9
10 //7 RC Circuit System Model Case RC Circuit System Model Case ( System Function & Impulse Response) RC Circuit System Model Case RC Circuit System Model Case ( System Function & Impulse Response) RC Circuit System Model Case

11 //7 Example: Example: Realization of Transfer Function Realization of Transfer Function First Order System
12 //7 Realization of Transfer Function Second Order System H s = s. +a s+a Realization of Transfer Function Second Order System H s = s. +a s+a Realization of Transfer Function Second Order System H s = s. +a s+a Realization of Transfer Function Second Order System H s = s. +a s+a
13 //7 Realization of Transfer Function Second Order System H s = s. +a s+a 3
Differential and Difference LTI systems
 Signals and Systems Lecture: 6 Differential and Difference LTI systems Differential and difference linear time-invariant (LTI) systems constitute an extremely important class of systems in engineering.
Signals and Systems Lecture: 6 Differential and Difference LTI systems Differential and difference linear time-invariant (LTI) systems constitute an extremely important class of systems in engineering.
One-Sided Laplace Transform and Differential Equations
 One-Sided Laplace Transform and Differential Equations As in the dcrete-time case, the one-sided transform allows us to take initial conditions into account. Preliminaries The one-sided Laplace transform
One-Sided Laplace Transform and Differential Equations As in the dcrete-time case, the one-sided transform allows us to take initial conditions into account. Preliminaries The one-sided Laplace transform
ECE 3620: Laplace Transforms: Chapter 3:
 ECE 3620: Laplace Transforms: Chapter 3: 3.1-3.4 Prof. K. Chandra ECE, UMASS Lowell September 21, 2016 1 Analysis of LTI Systems in the Frequency Domain Thus far we have understood the relationship between
ECE 3620: Laplace Transforms: Chapter 3: 3.1-3.4 Prof. K. Chandra ECE, UMASS Lowell September 21, 2016 1 Analysis of LTI Systems in the Frequency Domain Thus far we have understood the relationship between
Chapter 6: The Laplace Transform. Chih-Wei Liu
 Chapter 6: The Laplace Transform Chih-Wei Liu Outline Introduction The Laplace Transform The Unilateral Laplace Transform Properties of the Unilateral Laplace Transform Inversion of the Unilateral Laplace
Chapter 6: The Laplace Transform Chih-Wei Liu Outline Introduction The Laplace Transform The Unilateral Laplace Transform Properties of the Unilateral Laplace Transform Inversion of the Unilateral Laplace
LTI Systems (Continuous & Discrete) - Basics
 - Basics") LTI Systems (Continuous & Discrete) - Basics 1. A system with an input x(t) and output y(t) is described by the relation: y(t) = t. x(t). This system is (a) linear and time-invariant (b) linear and time-varying
LTI Systems (Continuous & Discrete) - Basics 1. A system with an input x(t) and output y(t) is described by the relation: y(t) = t. x(t). This system is (a) linear and time-invariant (b) linear and time-varying
Module 4. Related web links and videos. 1. FT and ZT
 Module 4 Laplace transforms, ROC, rational systems, Z transform, properties of LT and ZT, rational functions, system properties from ROC, inverse transforms Related web links and videos Sl no Web link
Module 4 Laplace transforms, ROC, rational systems, Z transform, properties of LT and ZT, rational functions, system properties from ROC, inverse transforms Related web links and videos Sl no Web link
Stability. X(s) Y(s) = (s + 2) 2 (s 2) System has 2 poles: points where Y(s) -> at s = +2 and s = -2. Y(s) 8X(s) G 1 G 2
 Y(s) = (s + 2) 2 (s 2) System has 2 poles: points where Y(s) -> at s = +2 and s = -2. Y(s) 8X(s) G 1 G 2") Stability 8X(s) X(s) Y(s) = (s 2) 2 (s 2) System has 2 poles: points where Y(s) -> at s = 2 and s = -2 If all poles are in region where s < 0, system is stable in Fourier language s = jω G 0 - x3 x7 Y(s)
Stability 8X(s) X(s) Y(s) = (s 2) 2 (s 2) System has 2 poles: points where Y(s) -> at s = 2 and s = -2 If all poles are in region where s < 0, system is stable in Fourier language s = jω G 0 - x3 x7 Y(s)
2. Time-Domain Analysis of Continuous- Time Signals and Systems
 2. Time-Domain Analysis of Continuous- Time Signals and Systems 2.1. Continuous-Time Impulse Function (1.4.2) 2.2. Convolution Integral (2.2) 2.3. Continuous-Time Impulse Response (2.2) 2.4. Classification
2. Time-Domain Analysis of Continuous- Time Signals and Systems 2.1. Continuous-Time Impulse Function (1.4.2) 2.2. Convolution Integral (2.2) 2.3. Continuous-Time Impulse Response (2.2) 2.4. Classification
Definition of the Laplace transform. 0 x(t)e st dt
e st dt") Definition of the Laplace transform Bilateral Laplace Transform: X(s) = x(t)e st dt Unilateral (or one-sided) Laplace Transform: X(s) = 0 x(t)e st dt ECE352 1 Definition of the Laplace transform (cont.)
Definition of the Laplace transform Bilateral Laplace Transform: X(s) = x(t)e st dt Unilateral (or one-sided) Laplace Transform: X(s) = 0 x(t)e st dt ECE352 1 Definition of the Laplace transform (cont.)
GATE EE Topic wise Questions SIGNALS & SYSTEMS
 www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
Lecture 2. Introduction to Systems (Lathi )
") Lecture 2 Introduction to Systems (Lathi 1.6-1.8) Pier Luigi Dragotti Department of Electrical & Electronic Engineering Imperial College London URL: www.commsp.ee.ic.ac.uk/~pld/teaching/ E-mail: p.dragotti@imperial.ac.uk
Lecture 2 Introduction to Systems (Lathi 1.6-1.8) Pier Luigi Dragotti Department of Electrical & Electronic Engineering Imperial College London URL: www.commsp.ee.ic.ac.uk/~pld/teaching/ E-mail: p.dragotti@imperial.ac.uk
The Laplace Transform
 The Laplace Transform Introduction There are two common approaches to the developing and understanding the Laplace transform It can be viewed as a generalization of the CTFT to include some signals with
The Laplace Transform Introduction There are two common approaches to the developing and understanding the Laplace transform It can be viewed as a generalization of the CTFT to include some signals with
ECE 301: Signals and Systems Homework Assignment #5
 ECE 30: Signals and Systems Homework Assignment #5 Due on November, 205 Professor: Aly El Gamal TA: Xianglun Mao Aly El Gamal ECE 30: Signals and Systems Homework Assignment #5 Problem Problem Compute
ECE 30: Signals and Systems Homework Assignment #5 Due on November, 205 Professor: Aly El Gamal TA: Xianglun Mao Aly El Gamal ECE 30: Signals and Systems Homework Assignment #5 Problem Problem Compute
ENGIN 211, Engineering Math. Laplace Transforms
 ENGIN 211, Engineering Math Laplace Transforms 1 Why Laplace Transform? Laplace transform converts a function in the time domain to its frequency domain. It is a powerful, systematic method in solving
ENGIN 211, Engineering Math Laplace Transforms 1 Why Laplace Transform? Laplace transform converts a function in the time domain to its frequency domain. It is a powerful, systematic method in solving
Time Response Analysis (Part II)
") Time Response Analysis (Part II). A critically damped, continuous-time, second order system, when sampled, will have (in Z domain) (a) A simple pole (b) Double pole on real axis (c) Double pole on imaginary
Time Response Analysis (Part II). A critically damped, continuous-time, second order system, when sampled, will have (in Z domain) (a) A simple pole (b) Double pole on real axis (c) Double pole on imaginary
23 Mapping Continuous-Time Filters to Discrete-Time Filters
 23 Mapping Continuous-Time Filters to Discrete-Time Filters Solutions to Recommended Problems S23.1 (a) X,(z) = - 1-2z 2 Z i. (b) X 2 (z) = 0 (-3)"z = (-3)-"z" 1 z 3-'z < 1, n=o
23 Mapping Continuous-Time Filters to Discrete-Time Filters Solutions to Recommended Problems S23.1 (a) X,(z) = - 1-2z 2 Z i. (b) X 2 (z) = 0 (-3)"z = (-3)-"z" 1 z 3-'z < 1, n=o
so mathematically we can say that x d [n] is a discrete-time signal. The output of the DT system is also discrete, denoted by y d [n].
![so mathematically we can say that x d [n] is a discrete-time signal. The output of the DT system is also discrete, denoted by y d [n].](/thumbs/93/111486327.jpg "so mathematically we can say that x d [n] is a discrete-time signal. The output of the DT system is also discrete, denoted by y d [n].") ELEC 36 LECURE NOES WEEK 9: Chapters 7&9 Chapter 7 (cont d) Discrete-ime Processing of Continuous-ime Signals It is often advantageous to convert a continuous-time signal into a discrete-time signal so
ELEC 36 LECURE NOES WEEK 9: Chapters 7&9 Chapter 7 (cont d) Discrete-ime Processing of Continuous-ime Signals It is often advantageous to convert a continuous-time signal into a discrete-time signal so
Module 4 : Laplace and Z Transform Problem Set 4
 Module 4 : Laplace and Z Transform Problem Set 4 Problem 1 The input x(t) and output y(t) of a causal LTI system are related to the block diagram representation shown in the figure. (a) Determine a differential
Module 4 : Laplace and Z Transform Problem Set 4 Problem 1 The input x(t) and output y(t) of a causal LTI system are related to the block diagram representation shown in the figure. (a) Determine a differential
EE Experiment 11 The Laplace Transform and Control System Characteristics
 EE216:11 1 EE 216 - Experiment 11 The Laplace Transform and Control System Characteristics Objectives: To illustrate computer usage in determining inverse Laplace transforms. Also to determine useful signal
EE216:11 1 EE 216 - Experiment 11 The Laplace Transform and Control System Characteristics Objectives: To illustrate computer usage in determining inverse Laplace transforms. Also to determine useful signal
3. Frequency-Domain Analysis of Continuous- Time Signals and Systems
 3. Frequency-Domain Analysis of Continuous- ime Signals and Systems 3.. Definition of Continuous-ime Fourier Series (3.3-3.4) 3.2. Properties of Continuous-ime Fourier Series (3.5) 3.3. Definition of Continuous-ime
3. Frequency-Domain Analysis of Continuous- ime Signals and Systems 3.. Definition of Continuous-ime Fourier Series (3.3-3.4) 3.2. Properties of Continuous-ime Fourier Series (3.5) 3.3. Definition of Continuous-ime
EE Homework 12 - Solutions. 1. The transfer function of the system is given to be H(s) = s j j
 = s j j") EE3054 - Homework 2 - Solutions. The transfer function of the system is given to be H(s) = s 2 +3s+3. Decomposing into partial fractions, H(s) = 0.5774j s +.5 0.866j + 0.5774j s +.5 + 0.866j. () (a) The
EE3054 - Homework 2 - Solutions. The transfer function of the system is given to be H(s) = s 2 +3s+3. Decomposing into partial fractions, H(s) = 0.5774j s +.5 0.866j + 0.5774j s +.5 + 0.866j. () (a) The
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE)
") QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
6.003 Homework #10 Solutions
 6.3 Homework # Solutions Problems. DT Fourier Series Determine the Fourier Series coefficients for each of the following DT signals, which are periodic in N = 8. x [n] / n x [n] n x 3 [n] n x 4 [n] / n
6.3 Homework # Solutions Problems. DT Fourier Series Determine the Fourier Series coefficients for each of the following DT signals, which are periodic in N = 8. x [n] / n x [n] n x 3 [n] n x 4 [n] / n
10 Transfer Matrix Models
 MIT EECS 6.241 (FALL 26) LECTURE NOTES BY A. MEGRETSKI 1 Transfer Matrix Models So far, transfer matrices were introduced for finite order state space LTI models, in which case they serve as an important
MIT EECS 6.241 (FALL 26) LECTURE NOTES BY A. MEGRETSKI 1 Transfer Matrix Models So far, transfer matrices were introduced for finite order state space LTI models, in which case they serve as an important
University of California at Berkeley College of Engineering Department of Electrical Engineering and Computer Sciences
 A Uiversity of Califoria at Berkeley College of Egieerig Departmet of Electrical Egieerig ad Computer Scieces U N I V E R S T H E I T Y O F LE T TH E R E B E LI G H T C A L I F O R N 8 6 8 I A EECS : Sigals
A Uiversity of Califoria at Berkeley College of Egieerig Departmet of Electrical Egieerig ad Computer Scieces U N I V E R S T H E I T Y O F LE T TH E R E B E LI G H T C A L I F O R N 8 6 8 I A EECS : Sigals
Circuit Analysis Using Fourier and Laplace Transforms
 EE2015: Electrical Circuits and Networks Nagendra Krishnapura https://wwweeiitmacin/ nagendra/ Department of Electrical Engineering Indian Institute of Technology, Madras Chennai, 600036, India July-November
EE2015: Electrical Circuits and Networks Nagendra Krishnapura https://wwweeiitmacin/ nagendra/ Department of Electrical Engineering Indian Institute of Technology, Madras Chennai, 600036, India July-November
Therefore the new Fourier coefficients are. Module 2 : Signals in Frequency Domain Problem Set 2. Problem 1
 Module 2 : Signals in Frequency Domain Problem Set 2 Problem 1 Let be a periodic signal with fundamental period T and Fourier series coefficients. Derive the Fourier series coefficients of each of the
Module 2 : Signals in Frequency Domain Problem Set 2 Problem 1 Let be a periodic signal with fundamental period T and Fourier series coefficients. Derive the Fourier series coefficients of each of the
EE 3054: Signals, Systems, and Transforms Summer It is observed of some continuous-time LTI system that the input signal.
 EE 34: Signals, Systems, and Transforms Summer 7 Test No notes, closed book. Show your work. Simplify your answers. 3. It is observed of some continuous-time LTI system that the input signal = 3 u(t) produces
EE 34: Signals, Systems, and Transforms Summer 7 Test No notes, closed book. Show your work. Simplify your answers. 3. It is observed of some continuous-time LTI system that the input signal = 3 u(t) produces
20.6. Transfer Functions. Introduction. Prerequisites. Learning Outcomes
 Transfer Functions 2.6 Introduction In this Section we introduce the concept of a transfer function and then use this to obtain a Laplace transform model of a linear engineering system. (A linear engineering
Transfer Functions 2.6 Introduction In this Section we introduce the concept of a transfer function and then use this to obtain a Laplace transform model of a linear engineering system. (A linear engineering
Control Systems. Laplace domain analysis
 Control Systems Laplace domain analysis L. Lanari outline introduce the Laplace unilateral transform define its properties show its advantages in turning ODEs to algebraic equations define an Input/Output
Control Systems Laplace domain analysis L. Lanari outline introduce the Laplace unilateral transform define its properties show its advantages in turning ODEs to algebraic equations define an Input/Output
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2010
 [E2.5] IMPERIAL COLLEGE LONDON DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2010 EEE/ISE PART II MEng. BEng and ACGI SIGNALS AND LINEAR SYSTEMS Time allowed: 2:00 hours There are FOUR
[E2.5] IMPERIAL COLLEGE LONDON DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2010 EEE/ISE PART II MEng. BEng and ACGI SIGNALS AND LINEAR SYSTEMS Time allowed: 2:00 hours There are FOUR
On the Stability of Linear Systems
 On the Stability of Linear Systems by Daniele Sasso * Abstract The criteria of stability defined in the standard theory of linear systems aren t exhaustive and show some inconsistencies. In this article
On the Stability of Linear Systems by Daniele Sasso * Abstract The criteria of stability defined in the standard theory of linear systems aren t exhaustive and show some inconsistencies. In this article
Chap. 3 Laplace Transforms and Applications
 Chap 3 Laplace Transforms and Applications LS 1 Basic Concepts Bilateral Laplace Transform: where is a complex variable Region of Convergence (ROC): The region of s for which the integral converges Transform
Chap 3 Laplace Transforms and Applications LS 1 Basic Concepts Bilateral Laplace Transform: where is a complex variable Region of Convergence (ROC): The region of s for which the integral converges Transform
EE 210. Signals and Systems Solutions of homework 2
 EE 2. Signals and Systems Solutions of homework 2 Spring 2 Exercise Due Date Week of 22 nd Feb. Problems Q Compute and sketch the output y[n] of each discrete-time LTI system below with impulse response
EE 2. Signals and Systems Solutions of homework 2 Spring 2 Exercise Due Date Week of 22 nd Feb. Problems Q Compute and sketch the output y[n] of each discrete-time LTI system below with impulse response
e st f (t) dt = e st tf(t) dt = L {t f(t)} s
 dt = e st tf(t) dt = L {t f(t)} s") Additional operational properties How to find the Laplace transform of a function f (t) that is multiplied by a monomial t n, the transform of a special type of integral, and the transform of a periodic
Additional operational properties How to find the Laplace transform of a function f (t) that is multiplied by a monomial t n, the transform of a special type of integral, and the transform of a periodic
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 2.6 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
MIT OpenCourseWare http://ocw.mit.edu 2.6 Signal Processing: Continuous and Discrete Fall 2008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
ECEN 420 LINEAR CONTROL SYSTEMS. Lecture 2 Laplace Transform I 1/52
 1/52 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 2 Laplace Transform I Linear Time Invariant Systems A general LTI system may be described by the linear constant coefficient differential equation: a n d n
1/52 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 2 Laplace Transform I Linear Time Invariant Systems A general LTI system may be described by the linear constant coefficient differential equation: a n d n
Chapter 3 Convolution Representation
 Chapter 3 Convolution Representation DT Unit-Impulse Response Consider the DT SISO system: xn [ ] System yn [ ] xn [ ] = δ[ n] If the input signal is and the system has no energy at n = 0, the output yn
Chapter 3 Convolution Representation DT Unit-Impulse Response Consider the DT SISO system: xn [ ] System yn [ ] xn [ ] = δ[ n] If the input signal is and the system has no energy at n = 0, the output yn
9.5 The Transfer Function
 Lecture Notes on Control Systems/D. Ghose/2012 0 9.5 The Transfer Function Consider the n-th order linear, time-invariant dynamical system. dy a 0 y + a 1 dt + a d 2 y 2 dt + + a d n y 2 n dt b du 0u +
Lecture Notes on Control Systems/D. Ghose/2012 0 9.5 The Transfer Function Consider the n-th order linear, time-invariant dynamical system. dy a 0 y + a 1 dt + a d 2 y 2 dt + + a d n y 2 n dt b du 0u +
Control Systems. Frequency domain analysis. L. Lanari
 Control Systems m i l e r p r a in r e v y n is o Frequency domain analysis L. Lanari outline introduce the Laplace unilateral transform define its properties show its advantages in turning ODEs to algebraic
Control Systems m i l e r p r a in r e v y n is o Frequency domain analysis L. Lanari outline introduce the Laplace unilateral transform define its properties show its advantages in turning ODEs to algebraic
Lecture 5: Linear Systems. Transfer functions. Frequency Domain Analysis. Basic Control Design.
 ISS0031 Modeling and Identification Lecture 5: Linear Systems. Transfer functions. Frequency Domain Analysis. Basic Control Design. Aleksei Tepljakov, Ph.D. September 30, 2015 Linear Dynamic Systems Definition
ISS0031 Modeling and Identification Lecture 5: Linear Systems. Transfer functions. Frequency Domain Analysis. Basic Control Design. Aleksei Tepljakov, Ph.D. September 30, 2015 Linear Dynamic Systems Definition
2. CONVOLUTION. Convolution sum. Response of d.t. LTI systems at a certain input signal
 2. CONVOLUTION Convolution sum. Response of d.t. LTI systems at a certain input signal Any signal multiplied by the unit impulse = the unit impulse weighted by the value of the signal in 0: xn [ ] δ [
2. CONVOLUTION Convolution sum. Response of d.t. LTI systems at a certain input signal Any signal multiplied by the unit impulse = the unit impulse weighted by the value of the signal in 0: xn [ ] δ [
Lecture 9 Time-domain properties of convolution systems
 EE 12 spring 21-22 Handout #18 Lecture 9 Time-domain properties of convolution systems impulse response step response fading memory DC gain peak gain stability 9 1 Impulse response if u = δ we have y(t)
EE 12 spring 21-22 Handout #18 Lecture 9 Time-domain properties of convolution systems impulse response step response fading memory DC gain peak gain stability 9 1 Impulse response if u = δ we have y(t)
Identification Methods for Structural Systems. Prof. Dr. Eleni Chatzi System Stability - 26 March, 2014
 Prof. Dr. Eleni Chatzi System Stability - 26 March, 24 Fundamentals Overview System Stability Assume given a dynamic system with input u(t) and output x(t). The stability property of a dynamic system can
Prof. Dr. Eleni Chatzi System Stability - 26 March, 24 Fundamentals Overview System Stability Assume given a dynamic system with input u(t) and output x(t). The stability property of a dynamic system can
Laplace Transforms and use in Automatic Control
 Laplace Transforms and use in Automatic Control P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: P.Santosh Krishna, SYSCON Recap Fourier series Fourier transform: aperiodic Convolution integral
Laplace Transforms and use in Automatic Control P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: P.Santosh Krishna, SYSCON Recap Fourier series Fourier transform: aperiodic Convolution integral
Responses of Digital Filters Chapter Intended Learning Outcomes:
 Responses of Digital Filters Chapter Intended Learning Outcomes: (i) Understanding the relationships between impulse response, frequency response, difference equation and transfer function in characterizing
Responses of Digital Filters Chapter Intended Learning Outcomes: (i) Understanding the relationships between impulse response, frequency response, difference equation and transfer function in characterizing
STABILITY. Have looked at modeling dynamic systems using differential equations. and used the Laplace transform to help find step and impulse
 SIGNALS AND SYSTEMS: PAPER 3C1 HANDOUT 4. Dr David Corrigan 1. Electronic and Electrical Engineering Dept. corrigad@tcd.ie www.sigmedia.tv STABILITY Have looked at modeling dynamic systems using differential
SIGNALS AND SYSTEMS: PAPER 3C1 HANDOUT 4. Dr David Corrigan 1. Electronic and Electrical Engineering Dept. corrigad@tcd.ie www.sigmedia.tv STABILITY Have looked at modeling dynamic systems using differential
Ch 2: Linear Time-Invariant System
 Ch 2: Linear Time-Invariant System A system is said to be Linear Time-Invariant (LTI) if it possesses the basic system properties of linearity and time-invariance. Consider a system with an output signal
Ch 2: Linear Time-Invariant System A system is said to be Linear Time-Invariant (LTI) if it possesses the basic system properties of linearity and time-invariance. Consider a system with an output signal
ECE301 Fall, 2006 Exam 1 Soluation October 7, Name: Score: / Consider the system described by the differential equation
 ECE301 Fall, 2006 Exam 1 Soluation October 7, 2006 1 Name: Score: /100 You must show all of your work for full credit. Calculators may NOT be used. 1. Consider the system described by the differential
ECE301 Fall, 2006 Exam 1 Soluation October 7, 2006 1 Name: Score: /100 You must show all of your work for full credit. Calculators may NOT be used. 1. Consider the system described by the differential
(i) Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform
 Represent discrete-time signals using transform. (ii) Understand the relationship between transform and discrete-time Fourier transform") z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
z Transform Chapter Intended Learning Outcomes: (i) Represent discrete-time signals using transform (ii) Understand the relationship between transform and discrete-time Fourier transform (iii) Understand
CH.6 Laplace Transform
 CH.6 Laplace Transform Where does the Laplace transform come from? How to solve this mistery that where the Laplace transform come from? The starting point is thinking about power series. The power series
CH.6 Laplace Transform Where does the Laplace transform come from? How to solve this mistery that where the Laplace transform come from? The starting point is thinking about power series. The power series
L2 gains and system approximation quality 1
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.242, Fall 24: MODEL REDUCTION L2 gains and system approximation quality 1 This lecture discusses the utility
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.242, Fall 24: MODEL REDUCTION L2 gains and system approximation quality 1 This lecture discusses the utility
2 Classification of Continuous-Time Systems
 Continuous-Time Signals and Systems 1 Preliminaries Notation for a continuous-time signal: x(t) Notation: If x is the input to a system T and y the corresponding output, then we use one of the following
Continuous-Time Signals and Systems 1 Preliminaries Notation for a continuous-time signal: x(t) Notation: If x is the input to a system T and y the corresponding output, then we use one of the following
Problem Set 3: Solution Due on Mon. 7 th Oct. in class. Fall 2013
 EE 56: Digital Control Systems Problem Set 3: Solution Due on Mon 7 th Oct in class Fall 23 Problem For the causal LTI system described by the difference equation y k + 2 y k = x k, () (a) By first finding
EE 56: Digital Control Systems Problem Set 3: Solution Due on Mon 7 th Oct in class Fall 23 Problem For the causal LTI system described by the difference equation y k + 2 y k = x k, () (a) By first finding
Course Background. Loosely speaking, control is the process of getting something to do what you want it to do (or not do, as the case may be).
.") ECE4520/5520: Multivariable Control Systems I. 1 1 Course Background 1.1: From time to frequency domain Loosely speaking, control is the process of getting something to do what you want it to do (or not
ECE4520/5520: Multivariable Control Systems I. 1 1 Course Background 1.1: From time to frequency domain Loosely speaking, control is the process of getting something to do what you want it to do (or not
Chapter 2 Time-Domain Representations of LTI Systems
 Chapter 2 Time-Domain Representations of LTI Systems 1 Introduction Impulse responses of LTI systems Linear constant-coefficients differential or difference equations of LTI systems Block diagram representations
Chapter 2 Time-Domain Representations of LTI Systems 1 Introduction Impulse responses of LTI systems Linear constant-coefficients differential or difference equations of LTI systems Block diagram representations
EC Signals and Systems
 UNIT I CLASSIFICATION OF SIGNALS AND SYSTEMS Continuous time signals (CT signals), discrete time signals (DT signals) Step, Ramp, Pulse, Impulse, Exponential 1. Define Unit Impulse Signal [M/J 1], [M/J
UNIT I CLASSIFICATION OF SIGNALS AND SYSTEMS Continuous time signals (CT signals), discrete time signals (DT signals) Step, Ramp, Pulse, Impulse, Exponential 1. Define Unit Impulse Signal [M/J 1], [M/J
Module 4 : Laplace and Z Transform Lecture 36 : Analysis of LTI Systems with Rational System Functions
 Module 4 : Laplace and Z Transform Lecture 36 : Analysis of LTI Systems with Rational System Functions Objectives Scope of this Lecture: Previously we understood the meaning of causal systems, stable systems
Module 4 : Laplace and Z Transform Lecture 36 : Analysis of LTI Systems with Rational System Functions Objectives Scope of this Lecture: Previously we understood the meaning of causal systems, stable systems
NAME: ht () 1 2π. Hj0 ( ) dω Find the value of BW for the system having the following impulse response.
 1 2π. Hj0 ( ) dω Find the value of BW for the system having the following impulse response.") University of California at Berkeley Department of Electrical Engineering and Computer Sciences Professor J. M. Kahn, EECS 120, Fall 1998 Final Examination, Wednesday, December 16, 1998, 5-8 pm NAME: 1.
University of California at Berkeley Department of Electrical Engineering and Computer Sciences Professor J. M. Kahn, EECS 120, Fall 1998 Final Examination, Wednesday, December 16, 1998, 5-8 pm NAME: 1.
ECE 301 Division 1, Fall 2006 Instructor: Mimi Boutin Final Examination
 ECE 30 Division, all 2006 Instructor: Mimi Boutin inal Examination Instructions:. Wait for the BEGIN signal before opening this booklet. In the meantime, read the instructions below and fill out the requested
ECE 30 Division, all 2006 Instructor: Mimi Boutin inal Examination Instructions:. Wait for the BEGIN signal before opening this booklet. In the meantime, read the instructions below and fill out the requested
New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2015 Final Exam
 New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2015 Name: Solve problems 1 3 and two from problems 4 7. Circle below which two of problems 4 7 you
New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2015 Name: Solve problems 1 3 and two from problems 4 7. Circle below which two of problems 4 7 you
Problem Set #7 Solutions Due: Friday June 1st, 2018 at 5 PM.
 EE102B Spring 2018 Signal Processing and Linear Systems II Goldsmith Problem Set #7 Solutions Due: Friday June 1st, 2018 at 5 PM. 1. Laplace Transform Convergence (10 pts) Determine whether each of the
EE102B Spring 2018 Signal Processing and Linear Systems II Goldsmith Problem Set #7 Solutions Due: Friday June 1st, 2018 at 5 PM. 1. Laplace Transform Convergence (10 pts) Determine whether each of the
Chapter 1 Fundamental Concepts
 Chapter 1 Fundamental Concepts 1 Signals A signal is a pattern of variation of a physical quantity, often as a function of time (but also space, distance, position, etc). These quantities are usually the
Chapter 1 Fundamental Concepts 1 Signals A signal is a pattern of variation of a physical quantity, often as a function of time (but also space, distance, position, etc). These quantities are usually the
Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals
 Understanding the relationship between transform and the Fourier transform for discrete-time signals") z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
z Transform Chapter Intended Learning Outcomes: (i) Understanding the relationship between transform and the Fourier transform for discrete-time signals (ii) Understanding the characteristics and properties
Basic Procedures for Common Problems
 Basic Procedures for Common Problems ECHE 550, Fall 2002 Steady State Multivariable Modeling and Control 1 Determine what variables are available to manipulate (inputs, u) and what variables are available
Basic Procedures for Common Problems ECHE 550, Fall 2002 Steady State Multivariable Modeling and Control 1 Determine what variables are available to manipulate (inputs, u) and what variables are available
EECE 3620: Linear Time-Invariant Systems: Chapter 2
 EECE 3620: Linear Time-Invariant Systems: Chapter 2 Prof. K. Chandra ECE, UMASS Lowell September 7, 2016 1 Continuous Time Systems In the context of this course, a system can represent a simple or complex
EECE 3620: Linear Time-Invariant Systems: Chapter 2 Prof. K. Chandra ECE, UMASS Lowell September 7, 2016 1 Continuous Time Systems In the context of this course, a system can represent a simple or complex
Chapter 4 : Laplace Transform
 4. Itroductio Laplace trasform is a alterative to solve the differetial equatio by the complex frequecy domai ( s = σ + jω), istead of the usual time domai. The DE ca be easily trasformed ito a algebraic
4. Itroductio Laplace trasform is a alterative to solve the differetial equatio by the complex frequecy domai ( s = σ + jω), istead of the usual time domai. The DE ca be easily trasformed ito a algebraic
Notes 17 largely plagiarized by %khc
 1 Notes 17 largely plagiarized by %khc 1 Laplace Transforms The Fourier transform allowed us to determine the frequency content of a signal, and the Fourier transform of an impulse response gave us the
1 Notes 17 largely plagiarized by %khc 1 Laplace Transforms The Fourier transform allowed us to determine the frequency content of a signal, and the Fourier transform of an impulse response gave us the
Control Systems Engineering (Chapter 2. Modeling in the Frequency Domain) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Systems Engineering (Chapter 2. Modeling in the Frequency Domain) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Overview Review on Laplace transform Learn about transfer
Control Systems Engineering (Chapter 2. Modeling in the Frequency Domain) Prof. Kwang-Chun Ho kwangho@hansung.ac.kr Tel: 02-760-4253 Fax:02-760-4435 Overview Review on Laplace transform Learn about transfer
Unit 2: Modeling in the Frequency Domain Part 2: The Laplace Transform. The Laplace Transform. The need for Laplace
 Unit : Modeling in the Frequency Domain Part : Engineering 81: Control Systems I Faculty of Engineering & Applied Science Memorial University of Newfoundland January 1, 010 1 Pair Table Unit, Part : Unit,
Unit : Modeling in the Frequency Domain Part : Engineering 81: Control Systems I Faculty of Engineering & Applied Science Memorial University of Newfoundland January 1, 010 1 Pair Table Unit, Part : Unit,
ECE 3793 Matlab Project 3
 ECE 3793 Matlab Project 3 Spring 2017 Dr. Havlicek DUE: 04/25/2017, 11:59 PM What to Turn In: Make one file that contains your solution for this assignment. It can be an MS WORD file or a PDF file. Make
ECE 3793 Matlab Project 3 Spring 2017 Dr. Havlicek DUE: 04/25/2017, 11:59 PM What to Turn In: Make one file that contains your solution for this assignment. It can be an MS WORD file or a PDF file. Make
Chapter 13 Z Transform
 Chapter 13 Z Transform 1. -transform 2. Inverse -transform 3. Properties of -transform 4. Solution to Difference Equation 5. Calculating output using -transform 6. DTFT and -transform 7. Stability Analysis
Chapter 13 Z Transform 1. -transform 2. Inverse -transform 3. Properties of -transform 4. Solution to Difference Equation 5. Calculating output using -transform 6. DTFT and -transform 7. Stability Analysis
ECE-202 FINAL April 30, 2018 CIRCLE YOUR DIVISION
 ECE 202 Final, Spring 8 ECE-202 FINAL April 30, 208 Name: (Please print clearly.) Student Email: CIRCLE YOUR DIVISION DeCarlo- 7:30-8:30 DeCarlo-:30-2:45 2025 202 INSTRUCTIONS There are 34 multiple choice
ECE 202 Final, Spring 8 ECE-202 FINAL April 30, 208 Name: (Please print clearly.) Student Email: CIRCLE YOUR DIVISION DeCarlo- 7:30-8:30 DeCarlo-:30-2:45 2025 202 INSTRUCTIONS There are 34 multiple choice
06/12/ rws/jMc- modif SuFY10 (MPF) - Textbook Section IX 1
 - Textbook Section IX 1") IV. Continuous-Time Signals & LTI Systems [p. 3] Analog signal definition [p. 4] Periodic signal [p. 5] One-sided signal [p. 6] Finite length signal [p. 7] Impulse function [p. 9] Sampling property [p.11]
IV. Continuous-Time Signals & LTI Systems [p. 3] Analog signal definition [p. 4] Periodic signal [p. 5] One-sided signal [p. 6] Finite length signal [p. 7] Impulse function [p. 9] Sampling property [p.11]
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM. COURSE: ECE 3084A (Prof. Michaels)
") GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 09-Dec-13 COURSE: ECE 3084A (Prof. Michaels) NAME: STUDENT #: LAST, FIRST Write your name on the front page
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 09-Dec-13 COURSE: ECE 3084A (Prof. Michaels) NAME: STUDENT #: LAST, FIRST Write your name on the front page
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM. COURSE: ECE 3084A (Prof. Michaels)
") GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 30-Apr-14 COURSE: ECE 3084A (Prof. Michaels) NAME: STUDENT #: LAST, FIRST Write your name on the front page
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 30-Apr-14 COURSE: ECE 3084A (Prof. Michaels) NAME: STUDENT #: LAST, FIRST Write your name on the front page
Ch 4: The Continuous-Time Fourier Transform
 Ch 4: The Continuous-Time Fourier Transform Fourier Transform of x(t) Inverse Fourier Transform jt X ( j) x ( t ) e dt jt x ( t ) X ( j) e d 2 Ghulam Muhammad, King Saud University Continuous-time aperiodic
Ch 4: The Continuous-Time Fourier Transform Fourier Transform of x(t) Inverse Fourier Transform jt X ( j) x ( t ) e dt jt x ( t ) X ( j) e d 2 Ghulam Muhammad, King Saud University Continuous-time aperiodic
Signals and Systems Chapter 2
 Signals and Systems Chapter 2 Continuous-Time Systems Prof. Yasser Mostafa Kadah Overview of Chapter 2 Systems and their classification Linear time-invariant systems System Concept Mathematical transformation
Signals and Systems Chapter 2 Continuous-Time Systems Prof. Yasser Mostafa Kadah Overview of Chapter 2 Systems and their classification Linear time-invariant systems System Concept Mathematical transformation
Introduction & Laplace Transforms Lectures 1 & 2
 Introduction & Lectures 1 & 2, Professor Department of Electrical and Computer Engineering Colorado State University Fall 2016 Control System Definition of a Control System Group of components that collectively
Introduction & Lectures 1 & 2, Professor Department of Electrical and Computer Engineering Colorado State University Fall 2016 Control System Definition of a Control System Group of components that collectively
MAE143A Signals & Systems - Homework 5, Winter 2013 due by the end of class Tuesday February 12, 2013.
 MAE43A Signals & Systems - Homework 5, Winter 23 due by the end of class Tuesday February 2, 23. If left under my door, then straight to the recycling bin with it. This week s homework will be a refresher
MAE43A Signals & Systems - Homework 5, Winter 23 due by the end of class Tuesday February 2, 23. If left under my door, then straight to the recycling bin with it. This week s homework will be a refresher
EC6303 SIGNALS AND SYSTEMS
 EC 6303-SIGNALS & SYSTEMS UNIT I CLASSIFICATION OF SIGNALS AND SYSTEMS 1. Define Signal. Signal is a physical quantity that varies with respect to time, space or a n y other independent variable.(or) It
EC 6303-SIGNALS & SYSTEMS UNIT I CLASSIFICATION OF SIGNALS AND SYSTEMS 1. Define Signal. Signal is a physical quantity that varies with respect to time, space or a n y other independent variable.(or) It
Each problem is worth 25 points, and you may solve the problems in any order.
 EE 120: Signals & Systems Department of Electrical Engineering and Computer Sciences University of California, Berkeley Midterm Exam #2 April 11, 2016, 2:10-4:00pm Instructions: There are four questions
EE 120: Signals & Systems Department of Electrical Engineering and Computer Sciences University of California, Berkeley Midterm Exam #2 April 11, 2016, 2:10-4:00pm Instructions: There are four questions
信號與系統 Signals and Systems
 Spring 2010 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb10 Jun10 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Spring 2010 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb10 Jun10 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
University Question Paper Solution
 Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
Unit 1: Introduction University Question Paper Solution 1. Determine whether the following systems are: i) Memoryless, ii) Stable iii) Causal iv) Linear and v) Time-invariant. i) y(n)= nx(n) ii) y(t)=
ECE 301 Division 1, Fall 2008 Instructor: Mimi Boutin Final Examination Instructions:
 ECE 30 Division, all 2008 Instructor: Mimi Boutin inal Examination Instructions:. Wait for the BEGIN signal before opening this booklet. In the meantime, read the instructions below and fill out the requested
ECE 30 Division, all 2008 Instructor: Mimi Boutin inal Examination Instructions:. Wait for the BEGIN signal before opening this booklet. In the meantime, read the instructions below and fill out the requested
Grades will be determined by the correctness of your answers (explanations are not required).
.") 6.00 (Fall 20) Final Examination December 9, 20 Name: Kerberos Username: Please circle your section number: Section Time 2 am pm 4 2 pm Grades will be determined by the correctness of your answers (explanations
6.00 (Fall 20) Final Examination December 9, 20 Name: Kerberos Username: Please circle your section number: Section Time 2 am pm 4 2 pm Grades will be determined by the correctness of your answers (explanations
JUST THE MATHS UNIT NUMBER LAPLACE TRANSFORMS 3 (Differential equations) A.J.Hobson
 A.J.Hobson") JUST THE MATHS UNIT NUMBER 16.3 LAPLACE TRANSFORMS 3 (Differential equations) by A.J.Hobson 16.3.1 Examples of solving differential equations 16.3.2 The general solution of a differential equation 16.3.3
JUST THE MATHS UNIT NUMBER 16.3 LAPLACE TRANSFORMS 3 (Differential equations) by A.J.Hobson 16.3.1 Examples of solving differential equations 16.3.2 The general solution of a differential equation 16.3.3
Advanced Analog Building Blocks. Prof. Dr. Peter Fischer, Dr. Wei Shen, Dr. Albert Comerma, Dr. Johannes Schemmel, etc
 Advanced Analog Building Blocks Prof. Dr. Peter Fischer, Dr. Wei Shen, Dr. Albert Comerma, Dr. Johannes Schemmel, etc 1 Topics 1. S domain and Laplace Transform Zeros and Poles 2. Basic and Advanced current
Advanced Analog Building Blocks Prof. Dr. Peter Fischer, Dr. Wei Shen, Dr. Albert Comerma, Dr. Johannes Schemmel, etc 1 Topics 1. S domain and Laplace Transform Zeros and Poles 2. Basic and Advanced current
NAME: 23 February 2017 EE301 Signals and Systems Exam 1 Cover Sheet
 NAME: 23 February 2017 EE301 Signals and Systems Exam 1 Cover Sheet Test Duration: 75 minutes Coverage: Chaps 1,2 Open Book but Closed Notes One 85 in x 11 in crib sheet Calculators NOT allowed DO NOT
NAME: 23 February 2017 EE301 Signals and Systems Exam 1 Cover Sheet Test Duration: 75 minutes Coverage: Chaps 1,2 Open Book but Closed Notes One 85 in x 11 in crib sheet Calculators NOT allowed DO NOT
ECE 3793 Matlab Project 3 Solution
 ECE 3793 Matlab Project 3 Solution Spring 27 Dr. Havlicek. (a) In text problem 9.22(d), we are given X(s) = s + 2 s 2 + 7s + 2 4 < Re {s} < 3. The following Matlab statements determine the partial fraction
ECE 3793 Matlab Project 3 Solution Spring 27 Dr. Havlicek. (a) In text problem 9.22(d), we are given X(s) = s + 2 s 2 + 7s + 2 4 < Re {s} < 3. The following Matlab statements determine the partial fraction
ECE 301 Division 1 Exam 1 Solutions, 10/6/2011, 8-9:45pm in ME 1061.
 ECE 301 Division 1 Exam 1 Solutions, 10/6/011, 8-9:45pm in ME 1061. Your ID will be checked during the exam. Please bring a No. pencil to fill out the answer sheet. This is a closed-book exam. No calculators
ECE 301 Division 1 Exam 1 Solutions, 10/6/011, 8-9:45pm in ME 1061. Your ID will be checked during the exam. Please bring a No. pencil to fill out the answer sheet. This is a closed-book exam. No calculators
信號與系統 Signals and Systems
 Spring 2015 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb15 Jun15 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Spring 2015 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb15 Jun15 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Identification Methods for Structural Systems
 Prof. Dr. Eleni Chatzi System Stability Fundamentals Overview System Stability Assume given a dynamic system with input u(t) and output x(t). The stability property of a dynamic system can be defined from
Prof. Dr. Eleni Chatzi System Stability Fundamentals Overview System Stability Assume given a dynamic system with input u(t) and output x(t). The stability property of a dynamic system can be defined from
Solving a RLC Circuit using Convolution with DERIVE for Windows
 Solving a RLC Circuit using Convolution with DERIVE for Windows Michel Beaudin École de technologie supérieure, rue Notre-Dame Ouest Montréal (Québec) Canada, H3C K3 mbeaudin@seg.etsmtl.ca - Introduction
Solving a RLC Circuit using Convolution with DERIVE for Windows Michel Beaudin École de technologie supérieure, rue Notre-Dame Ouest Montréal (Québec) Canada, H3C K3 mbeaudin@seg.etsmtl.ca - Introduction
UNIT-II Z-TRANSFORM. This expression is also called a one sided z-transform. This non causal sequence produces positive powers of z in X (z).
.") Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
MAE143 A - Signals and Systems - Winter 11 Midterm, February 2nd
 MAE43 A - Signals and Systems - Winter Midterm, February 2nd Instructions (i) This exam is open book. You may use whatever written materials you choose, including your class notes and textbook. You may
MAE43 A - Signals and Systems - Winter Midterm, February 2nd Instructions (i) This exam is open book. You may use whatever written materials you choose, including your class notes and textbook. You may
The Laplace Transform
 The Laplace Transform Generalizing the Fourier Transform The CTFT expresses a time-domain signal as a linear combination of complex sinusoids of the form e jωt. In the generalization of the CTFT to the
The Laplace Transform Generalizing the Fourier Transform The CTFT expresses a time-domain signal as a linear combination of complex sinusoids of the form e jωt. In the generalization of the CTFT to the
Properties of the Autocorrelation Function
 Properties of the Autocorrelation Function I The autocorrelation function of a (real-valued) random process satisfies the following properties: 1. R X (t, t) 0 2. R X (t, u) =R X (u, t) (symmetry) 3. R
Properties of the Autocorrelation Function I The autocorrelation function of a (real-valued) random process satisfies the following properties: 1. R X (t, t) 0 2. R X (t, u) =R X (u, t) (symmetry) 3. R
Outline. Classical Control. Lecture 2
 Outline Outline Outline Review of Material from Lecture 2 New Stuff - Outline Review of Lecture System Performance Effect of Poles Review of Material from Lecture System Performance Effect of Poles 2 New
Outline Outline Outline Review of Material from Lecture 2 New Stuff - Outline Review of Lecture System Performance Effect of Poles Review of Material from Lecture System Performance Effect of Poles 2 New
( ) ( ) ω = X x t e dt
 ( ) ω = X x t e dt") The Laplace Tranform The Laplace Tranform generalize the Fourier Traform for the entire complex plane For an ignal x(t) the pectrum, or it Fourier tranform i (if it exit): t X x t e dt ω = For the ame
The Laplace Tranform The Laplace Tranform generalize the Fourier Traform for the entire complex plane For an ignal x(t) the pectrum, or it Fourier tranform i (if it exit): t X x t e dt ω = For the ame