Fast-Fourier Optimization
|
|
|
- Wilfred Blankenship
- 5 years ago
- Views:
Transcription

1 Fast-Fourier Optimization Robert J. Vanderbei August 21, 2012 ISMP 2012 Berlin Deutschland rvdb
2 The Plan... Brief Synopsis of Pupil-Mask Coronagraphy Fourier Transforms in 2D Brute Force vs. Smart Approach Applying it in an Optimization Context Some New Masks for High-Contrast Imaging Relation to the Fast Fourier Transform (FFT) Another Application: Compressed Sensing The Message... FFT Sparse Factorization: A = A 1 A 2 A k

3 Motivating Problem High-Contrast Imaging for Planet-Finding Build a telescope capable of finding Earth-like planets around nearby Sun-like stars. Problem is hard: Star is times brighter than the planet. Angular separation is small 0.01 arcseconds. Light is a wave: the star is not a pinpoint of light it has a diffraction pattern. Light is photons Poisson statistics. The diffraction pattern is the magnitude-squared of the Fourier transform of the telescope s pupil.
4 Pupil Apodization Let f(x, y) denote the transmissivity (i.e., apodization) at location (x, y) on the surface of a filter placed in the pupil of a telescope. The electromagnetic field in the image plane of such a telescope associated with an on-axis point source (i.e., a star) is proportional to the Fourier transform of the apodization f. Assuming that the telescope s opening has a radius of one, the Fourier transform can be written as f(ξ, η) = e 2πi(xξ+yη) f(x, y)dxdy. The intensity of the light in the image is proportional to the magnitude squared of f. Assuming that the underlying telescope has a circular opening of radius one, we impose the following constraint on f: f(x, y) = 0 for x 2 + y 2 > 1.
5 Optimized Apodizations Maximize light throughput subject to constraint that almost no light reaches a given dark zone D and other structural constraints: ( maximize f(x, y)dxdy = f(0, ) 0) subject to f(ξ, η) ε f(0, 0), (ξ, η) D, f(x, y) = 0, x 2 + y 2 > 1, 0 f(x, y) 1, for all x, y. Here, ε is a small positive constant (on the order of 10 5 ). In general, the Fourier transform f is complex valued. This optimization problem has a linear objective function and both linear constraints and second-order cone constraints. Hence, a discretized version can be solved (to a global optimum).
6 Exploiting Symmetry Assuming that the filter can be symmetric with respect to reflection about both axes (note: sometimes not possible), the Fourier transform can be written as f(ξ, η) = cos(2πxξ) cos(2πyη)f(x, y)dxdy. In this case, the Fourier transform is real and so the second-order cone constraints can be replaced with a pair of inequalities, ε f(0, 0) f(ξ, η) ε f(0, 0), making the problem an infinite dimensional linear programming problem. Curse of Dimensionality: 2 > 1.



 inscribed in")






7 Potpourri of Pupil Masks PSF for Single Prolate Spheroidal Pupil Clipboard Fig. 5. Left The single prolate spheroidal wave function shaped pupil aperture (Slepian 1965) inscribed in a circular aperture of unit area. Right The corresponding PSF plotted on a logarithmic scale with black areas below brightest. This mask has a single-exposure normalized discovery integration time of 4.6 with a small discovery space at the inner working distance (IWD). Clipboard
8 Discretization Consider a two-dimensional Fourier transform f(ξ, η) = Its discrete approximation can be computed as cos(2πxξ) cos(2πyη)f(x, y)dxdy. where n n f j1,j 2 = 4 cos(2πx k1 ξ j1 ) cos(2πy k2 η j2 )f k1,k 2 x y, 1 j 1, j 2 m, k 2 =1 k 1 =1 [ xk ] [ ] x = (k 1/2), 1 k n, ] [ y] ξ = (j 1/2), 1 j m, η j η f k1,k 2 = f(x k1, y k2 ), 1 k 1, k 2 n f j1,j 2 f(ξ j1, η j2 ), 1 j 1, j 2 m. [ y k ξj Complexity: m 2 n 2.
9 A Clever (and Trivial!) Idea The obvious brute force calculation requires m 2 n 2 operations. However, we can factor the double sum into a nested pair of sums. Introducing new variables that represent the inner sum, we get: n g j1,k 2 = 2 cos(2πx k1 ξ j1 )f k1,k 2 x, 1 j 1 m, 1 k 2 n, k 1 =1 n f j1,j 2 = 2 cos(2πy k2 η j2 )g j1,k 2 y, 1 j 1, j 2 m, k 2 =1 Formulated this way, the calculation requires only mn 2 + m 2 n operations.
10 Brute Force vs Clever Approach On the following page we show two ampl model formulations of this problem. On the left is the version expressed in the straightforward one-step manner. On the right is the ampl model for the same problem but with the Fourier transform expressed as a pair of transforms the so-called two-step process. The dark zone D is a pair of sectors of an annulus with inner radius 4 and outer radius 20. Except for the resolution, the two models produce the same result.
11 Two ampl Models param rho0 := 4; param rho1 := 20; param m := 35; # discretization parameter param n := 150; # discretization parameter param dx := 1/(2*n); param dy := dx; set Xs := setof {j in 0.5..n-0.5 by 1} j/(2*n); set Ys := Xs; set Pupil := setof {x in Xs, y in Ys: x^2+y^2<0.25} (x,y); set Xis := setof {j in 0..m} j*rho1/m; set Etas := Xis; set DarkHole := setof {xi in Xis, eta in Etas: xi^2+eta^2>=rho0^2 && xi^2+eta^2<=rho1^2 && eta <= xi } (xi,eta); var f {(x,y) in Pupil} >= 0, <= 1; var fhat {xi in Xis, eta in Etas}; maximize area: sum {(x,y) in Pupil} f[x,y]*dx*dy; subject to fhat_def {xi in Xis, eta in Etas}: fhat[xi,eta] = 4*sum {(x,y) in Pupil} f[x,y]*cos(2*pi*x*xi) *cos(2*pi*y*eta)*dx*dy; subject to sidelobe_pos {(xi,eta) in DarkHole}: fhat[xi,eta] <= 10^(-5)*fhat[0,0]; subject to sidelobe_neg {(xi,eta) in DarkHole}: -10^(-5)*fhat[0,0] <= fhat[xi,eta]; solve; param rho0 := 4; param rho1 := 20; param m := 35; # discretization parameter param n := 1000; # discretization parameter param dx := 1/(2*n); param dy := dx; set Xs := setof {j in 0.5..n-0.5 by 1} j/(2*n); set Ys := Xs; set Pupil := setof {x in Xs, y in Ys: x^2+y^2 < 0.25} (x,y); set Xis := setof {j in 0..m} j*rho1/m; set Etas := Xis; set DarkHole := setof {xi in Xis, eta in Etas: xi^2+eta^2>=rho0^2 && xi^2+eta^2<=rho1^2 && eta <= xi } (xi,eta); var f {(x,y) in Pupil} >= 0, <= 1; var g {xi in Xis, y in Ys}; var fhat {xi in Xis, eta in Etas}; maximize area: sum {(x,y) in Pupil} f[x,y]*dx*dy; subject to g_def {xi in Xis, y in Ys}: g[xi,y] = 2*sum {x in Xs: (x,y) in Pupil} f[x,y]*cos(2*pi*x*xi)*dx; subject to fhat_def {xi in Xis, eta in Etas}: fhat[xi,eta] = 2*sum {y in Ys} g[xi,y]*cos(2*pi*y*eta)*dy; subject to sidelobe_pos {(xi,eta) in DarkHole}: fhat[xi,eta] <= 10^(-5)*fhat[0,0]; subject to sidelobe_neg {(xi,eta) in DarkHole}: -10^(-5)*fhat[0,0] <= fhat[xi,eta]; solve;

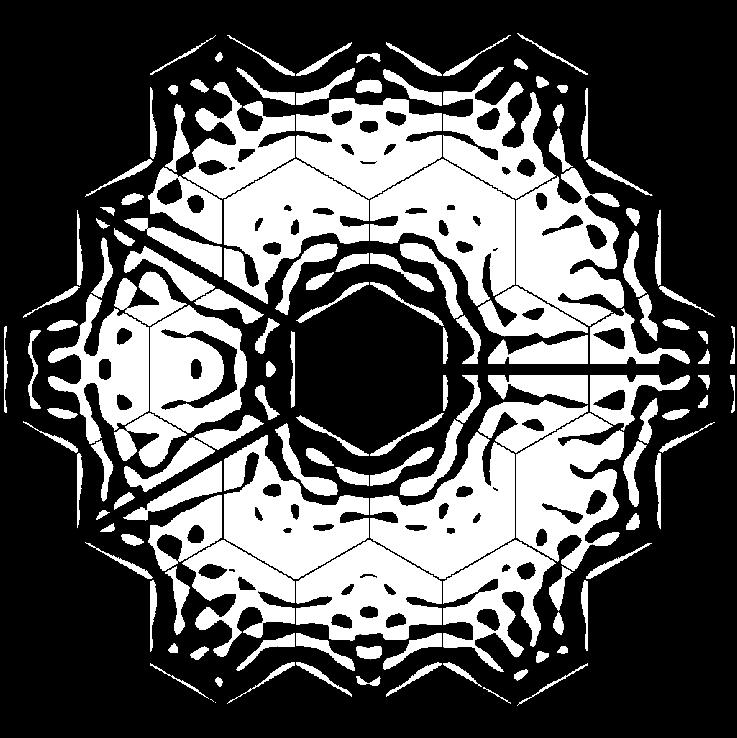
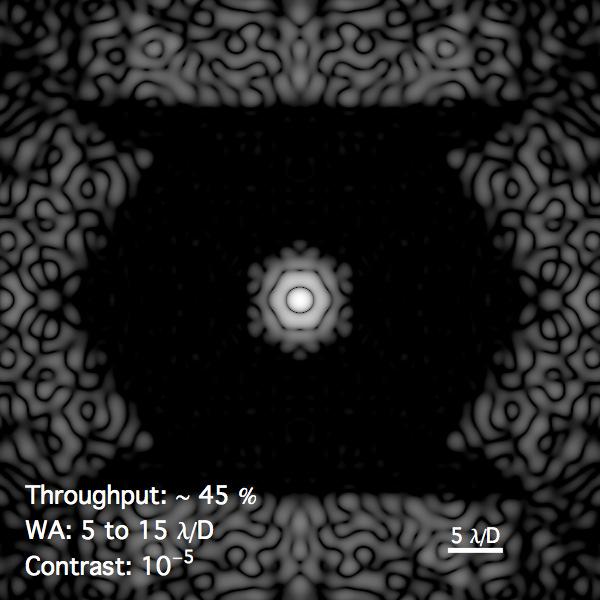
12 Optimal Solution Left. The optimal apodization found by either of the models shown on previous slide. Center. Plot of the star s image (using a linear stretch). Right. Logarithmic plot of the star s image (black = ). Notes: The apodization turns out to be purely opaque and transparent (i.e., a mask). The mask has islands and therefore must be laid on glass.
13 Close Up Brute force with n = 150 Two-step with n = 1000
14 Summary Problem Stats Comparison between a few sizes of the one-step and two-step models. Problem-specific stats. Model n m constraints variables nonzeros arith. ops. One step ,672 17,247,872 17,196,541,336 One step * * * * Two step ,672 24, ,240 3,972,909,664 Two step , ,660 7,738,352 11,854,305,444 Two step , ,715 29,610,332 23,532,807,719 Hardware/Solution-specific performance comparison data. Model n m iterations primal objective dual objective cpu time (sec) One step One step * * * * Two step Two step Two step
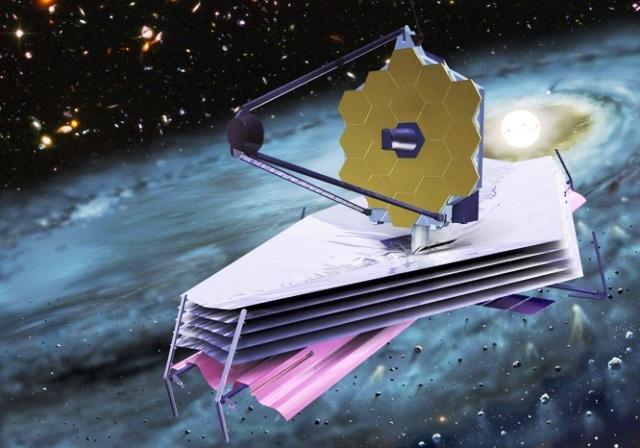
15 JWST



")
16 Repurposed Spy Satellite (Not the exact design)
17 Matrix Notation Let F := [f k1,k 2 ], G := [g j1,k 2 ], F := [ f j1,j 2 ], and K := [κ j1,k 2 ], where K denotes the m n Fourier kernel matrix whose elements are κ j1,k 2 = 2 cos(2πx k1 ξ j1 ) x. The two-dimensional Fourier transform F can be written simply as F = KF K T and the computation of the transform in two steps is just the statement that the two matrix multiplications can, and should, be done separately: G = KF F = GK T.
18 matlab Brute force method: for j1 in 1:m for j2 in 1:m fhat(j1,j2) = 0; for k1 in 1:n for k2 in 1:n fhat(j1,j2) = fhat(j1,j2) * cos(2*pi*x(k1)*xi(j1)) *... cos(2*pi*y(k2)*eta(j2)) *... f(k1,k2)*dx*dy; end end end end Two-step method: K = 2 * cos(2*pi*xi*x )*dx; fhat = K*f*K ;
19 Clever Idea Matrix Sparsification Linear Programming Paradigm Linear programming software solves problems in this form: maximize c T x subject to Ax = b, x 0, where b and c are given vectors and A is a given matrix. Of course, x is a vector. ampl converts a problem from its natural formulation to this paradigm and then hands it off to a solver.
20 Converting to the LP Paradigm Let f j, g j, and f j denote the column vectors of matrices F, G, and F : F = [f 1 f n ], G = [g 1 g n ], F [ = f 1 f ] m. We can list the elements of F, G and F in column vectors: f 1 g 1 vec(f ) =., vec(g) =. f n g n It is straightforward to check that vec(g) = K... K, vec( F ) = vec(f ) f 1. f m. and that vec( F ) = κ 1,1 I κ 1,n I.. κ m,1 I κ m,n I vec(g).
21 The Constraint Matrix One-Step Method Ax = b κ 1,1 K κ 1,n K I.. κ m,1 K κ m,n K..... I f 1. f ṋ f 1. f m = The big left block is a dense m 2 n 2 matrix.
22 The Constraint Matrix: Two-Step Method Ax = b K I K I κ 1,1 I κ 1,n I I..... κ m,1 I κ m,n I I... f 1. f n g 1. g ṋ f 1. f m = The big upper-left block is a sparse block-diagonal mn n 2 matrix with m 2 n nonzeros. The middle block is an m n matrix of sub-blocks which are each m m diagonal matrices. Hence, it is very sparse, containing only m 2 n nonzeros.
23 Fast Fourier Transform (FFT) One-dimensional Fourier transform: Discrete approximation: f j = f(ξ) = 1 1 e 2πixξ f(x)dx. n e 2πi k x j ξ f k x, m < j m. k= n+1 Let N = 2n and M = 2m. Suppose that N and M can be factored: N = N 0 N 1 and M = M 0 M 1. Suppose further that the factors are even: N 0 = 2n 0, N 1 = 2n 1, M 0 = 2m 0, and M 1 = 2m 1.
24 It s the same idea! If we now decompose our sequencing indices k and j into we get k = N 0 k 1 + k 0 and j = M 0 j 1 + j 0, f j0,j 1 = n 0 n 1 k 0 = n 0 +1 k 1 = n 1 +1 e 2πiN 0k 1 xm 0 j 1 ξ e 2πiN 0k 1 xj 0 ξ e 2πik 0 x(m 0 j 1 +j 0 ) ξ f k0,k 1 x. We want the first exponential factor to evaluate to one. To make that happen, we assume that N 0 M 0 x ξ is an integer. With that first exponential factor out of the way, we can again write down a two-step algorithm g j0,k 0 = f j0,j 1 = n 1 k 1 = n 1 +1 n 0 k 0 = n 0 +1 e 2πiN 0k 1 xj 0 ξ f k0,k 1 x, e 2πik 0 x(m 0 j 1 +j 0 ) ξ g j0,k 0, m 0 < j 0 m 0, n 0 < k 0 n 0, m 0 < j 0 m 0 m 1 < j 1 m 1.
25 Complexity The number of multiply/adds required for this two-step algorithm is NM 0 + MN 0 = MN ( ). M 1 N 1 If M N and M 1 N 1 N, the complexity simplifies to 2N N. Compared to the one-step algorithm, which takes N 2 multiply/adds, this two-step algorithm gives an improvement of a factor of N/2. Also, if M is much smaller than N, we get further improvement over the full N N case. Of course, if M 0, M 1, N 0, and N 1 can be further factored, then this two-step algorithm can be extended recursively. For the FFT, M and N are chosen to be a power of 3, or more commonly 2. In this case, the recursively applied algorithm is an N log 2 N algorithm.
26 Another Application: Compressed Sensing Here... minimize λ X 1 + E 2 2 subject to KXK T + E = B, X 0. B is the observed image, which is the 2D Fourier Transform of the true image X. E is a matrix of iid noise parameters (so-called shot noise). K is an m n Fourier kernel. λ is a positive parameter controlling the importance trade-off between the two terms of the objective function. A sparse formulation: minimize λ X 1 + E 2 2 subject to XK T Y = 0, KY + E = B, X 0.
27 A sparser formulation (based on K = K 1 K 2 ): minimize λ X 1 + E 2 2 subject to XK T 2 Y 2 = 0, Y 2 K T 1 Y 1 = 0, K 2 Y 1 Z 2 = 0, K 1 Z 2 + E = B, X 0.
28 References [1] R. Soummer, L. Pueyo, A. Sivaramakrishnan, and R.J. Vanderbei. Fast computation of lyot-style coronagraph propagation. Optics Express, 15(24): , [2] A. Carlotti, R. J. Vanderbei, and N. J. Kasdin. Optimal pupil apodizations for arbitrary apertures. Optics Express, 19(27): , [3] R. J. Vanderbei. Fast fourier optimization. Math. Prog. Comp., 4(1):53 69, 2012.
Fast-Fourier Optimization
 Fast-Fourier Optimization Robert J. Vanderbei Operations Research and Financial Engineering, Astrophysics, Computer Science, Mathematics, Mechanical and Aerospace Engineering Princeton University August
Fast-Fourier Optimization Robert J. Vanderbei Operations Research and Financial Engineering, Astrophysics, Computer Science, Mathematics, Mechanical and Aerospace Engineering Princeton University August
High-Contrast Imaging via Pupil Masking
 High-Contrast Imaging via Pupil Masking Robert J. Vanderbei July 24, 2013 AFTA-Math Workshop PCTS Princeton Univ. http://www.princeton.edu/ rvdb High-Contrast Imaging for Planet-Finding Build a telescope
High-Contrast Imaging via Pupil Masking Robert J. Vanderbei July 24, 2013 AFTA-Math Workshop PCTS Princeton Univ. http://www.princeton.edu/ rvdb High-Contrast Imaging for Planet-Finding Build a telescope
Fast Fourier Optimization and Related Sparsifications
 Fast Fourier Optimization and Related Sparsifications Robert J. Vanderbei 2014 June 24 ONR Grantees Meeting MIT http://www.princeton.edu/ rvdb The Plan... Introduction Fourier Transform Fourier Optimization
Fast Fourier Optimization and Related Sparsifications Robert J. Vanderbei 2014 June 24 ONR Grantees Meeting MIT http://www.princeton.edu/ rvdb The Plan... Introduction Fourier Transform Fourier Optimization
Extreme Optics and The Search for Earth-Like Planets
 Extreme Optics and The Search for Earth-Like Planets Robert J. Vanderbei November 21, 27 ORFE 522 Fun (Pre-Thanksgiving) Lecture Work supported by ONR and NASA/JPL http://www.princeton.edu/ rvdb ABSTRACT
Extreme Optics and The Search for Earth-Like Planets Robert J. Vanderbei November 21, 27 ORFE 522 Fun (Pre-Thanksgiving) Lecture Work supported by ONR and NASA/JPL http://www.princeton.edu/ rvdb ABSTRACT
The Search for Earth-Like Planets
 The Search for Earth-Like Planets Robert J. Vanderbei April 20, 2005 Page 1 of 34 Operations Research and Financial Engineering Princeton University Princeton, NJ 08544 http://www.princeton.edu/ rvdb Interior-Point
The Search for Earth-Like Planets Robert J. Vanderbei April 20, 2005 Page 1 of 34 Operations Research and Financial Engineering Princeton University Princeton, NJ 08544 http://www.princeton.edu/ rvdb Interior-Point
Designing a Space Telescope to Image Earth-like Planets
 Designing a Space Telescope to Image Earth-like Planets Robert J. Vanderbei Rutgers University December 4, 2002 Page 1 of 28 Member: Princeton University/Ball Aerospace TPF Team http://www.princeton.edu/
Designing a Space Telescope to Image Earth-like Planets Robert J. Vanderbei Rutgers University December 4, 2002 Page 1 of 28 Member: Princeton University/Ball Aerospace TPF Team http://www.princeton.edu/
Searching for Earth-Like Planets:
 Searching for Earth-Like Planets: NASA s Terrestrial Planet Finder Space Telescope Robert J. Vanderbei January 11, 2004 Amateur Astronomers Association of Princeton Peyton Hall, Princeton University Page
Searching for Earth-Like Planets: NASA s Terrestrial Planet Finder Space Telescope Robert J. Vanderbei January 11, 2004 Amateur Astronomers Association of Princeton Peyton Hall, Princeton University Page
Extreme Optics and The Search for Earth-Like Planets
 Extreme Optics and The Search for Earth-Like Planets Robert J. Vanderbei August 3, 2006 ISMP 2006 Rio de Janeiro Work supported by ONR and NASA/JPL http://www.princeton.edu/ rvdb ABSTRACT NASA/JPL plans
Extreme Optics and The Search for Earth-Like Planets Robert J. Vanderbei August 3, 2006 ISMP 2006 Rio de Janeiro Work supported by ONR and NASA/JPL http://www.princeton.edu/ rvdb ABSTRACT NASA/JPL plans
Making Dark Shadows with Linear Programming
 Making Dark Shadows with Linear Programming Robert J. Vanderbei 28 October 13 INFORMS 28 Washington DC http://www.princeton.edu/ rvdb Are We Alone? Indirect Detection Methods Over 3 planets found more
Making Dark Shadows with Linear Programming Robert J. Vanderbei 28 October 13 INFORMS 28 Washington DC http://www.princeton.edu/ rvdb Are We Alone? Indirect Detection Methods Over 3 planets found more
Optimization in Engineering Design
 Optimization in Engineering Design Robert J. Vanderbei 29 October 5 Computational Engineering and Science/HPC Lehigh University http://www.princeton.edu/ rvdb Collaborators Optimization: Dave Shanno, Rutgers
Optimization in Engineering Design Robert J. Vanderbei 29 October 5 Computational Engineering and Science/HPC Lehigh University http://www.princeton.edu/ rvdb Collaborators Optimization: Dave Shanno, Rutgers
Operations Scheduling for the LSST
 Operations Scheduling for the LSST Robert J. Vanderbei 2015 March 18 http://www.princeton.edu/ rvdb LSST Scheduler Workshop Tucson AZ Simple Optimization Problem Unconstrained max x R n f(x) The function
Operations Scheduling for the LSST Robert J. Vanderbei 2015 March 18 http://www.princeton.edu/ rvdb LSST Scheduler Workshop Tucson AZ Simple Optimization Problem Unconstrained max x R n f(x) The function
Sparsity Matters. Robert J. Vanderbei September 20. IDA: Center for Communications Research Princeton NJ.
 Sparsity Matters Robert J. Vanderbei 2017 September 20 http://www.princeton.edu/ rvdb IDA: Center for Communications Research Princeton NJ The simplex method is 200 times faster... The simplex method is
Sparsity Matters Robert J. Vanderbei 2017 September 20 http://www.princeton.edu/ rvdb IDA: Center for Communications Research Princeton NJ The simplex method is 200 times faster... The simplex method is
Diffraction modelling for solar coronagraphy
 Diffraction modelling for solar coronagraphy Application to ASPIICS Raphaël Rougeot Laboratoire Lagrange, Nice 12/02/2018 12/02/2018 R.Rougeot 1 Outline 1) Proba-3 mission and ASPIICS 2) Diffraction from
Diffraction modelling for solar coronagraphy Application to ASPIICS Raphaël Rougeot Laboratoire Lagrange, Nice 12/02/2018 12/02/2018 R.Rougeot 1 Outline 1) Proba-3 mission and ASPIICS 2) Diffraction from
Diffraction model for the external occulter of the solar coronagraph ASPIICS
 Diffraction model for the external occulter of the solar coronagraph ASPIICS Raphaël Rougeot OCA, Nice 14/05/2018 14/05/2018 R.Rougeot 1 Outline 1) Proba-3 mission and ASPIICS 2) Diffraction from external
Diffraction model for the external occulter of the solar coronagraph ASPIICS Raphaël Rougeot OCA, Nice 14/05/2018 14/05/2018 R.Rougeot 1 Outline 1) Proba-3 mission and ASPIICS 2) Diffraction from external
Eliminating Poisson s Spot with Linear Programming
 Eliminating Poisson s Spot with Linear Programming Robert J. Vanderbei Abstract A leading design concept for NASA s upcoming planet-finding space telescope involves placing an occulter 72, km in front
Eliminating Poisson s Spot with Linear Programming Robert J. Vanderbei Abstract A leading design concept for NASA s upcoming planet-finding space telescope involves placing an occulter 72, km in front
arxiv:astro-ph/ v1 2 Oct 2002
 **TITLE** ASP Conference Series, Vol. **VOLUME***, **YEAR OF PUBLICATION** **NAMES OF EDITORS** The Extra-Solar Planet Imager (ESPI) arxiv:astro-ph/0210046v1 2 Oct 2002 P. Nisenson, G.J. Melnick, J. Geary,
**TITLE** ASP Conference Series, Vol. **VOLUME***, **YEAR OF PUBLICATION** **NAMES OF EDITORS** The Extra-Solar Planet Imager (ESPI) arxiv:astro-ph/0210046v1 2 Oct 2002 P. Nisenson, G.J. Melnick, J. Geary,
EXTREME OPTICS AND THE SEARCH FOR EARTH-LIKE PLANETS. Operations Research and Financial Engineering Princeton University. Revised February 3, 2006
 EXTREME OPTICS AND THE SEARCH FOR EARTH-LIKE PLANETS ROBERT J. VANDERBEI Operations Research and Financial Engineering Princeton University Revised February 3, 26 Abstract. In this paper I describe a new
EXTREME OPTICS AND THE SEARCH FOR EARTH-LIKE PLANETS ROBERT J. VANDERBEI Operations Research and Financial Engineering Princeton University Revised February 3, 26 Abstract. In this paper I describe a new
Linear Programming: Chapter 1 Introduction
 Linear Programming: Chapter 1 Introduction Robert J. Vanderbei October 17, 2007 Operations Research and Financial Engineering Princeton University Princeton, NJ 08544 http://www.princeton.edu/ rvdb Resource
Linear Programming: Chapter 1 Introduction Robert J. Vanderbei October 17, 2007 Operations Research and Financial Engineering Princeton University Princeton, NJ 08544 http://www.princeton.edu/ rvdb Resource
Coronagraphic Imaging of Exoplanets with NIRCam
 Coronagraphic Imaging of Exoplanets with NIRCam C. Beichman NASA Exoplanet Science Institute, Jet Propulsion Laboratory, California Institute of Technology For the NIRCam Team September 27, 2016 Copyright
Coronagraphic Imaging of Exoplanets with NIRCam C. Beichman NASA Exoplanet Science Institute, Jet Propulsion Laboratory, California Institute of Technology For the NIRCam Team September 27, 2016 Copyright
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 12 Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted for noncommercial,
Scientific Computing: An Introductory Survey Chapter 12 Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted for noncommercial,
Direct imaging and characterization of habitable planets with Colossus
 Direct imaging and characterization of habitable planets with Colossus Olivier Guyon Subaru Telescope, National Astronomical Observatory of Japan University of Arizona Contact: guyon@naoj.org 1 Large telescopes
Direct imaging and characterization of habitable planets with Colossus Olivier Guyon Subaru Telescope, National Astronomical Observatory of Japan University of Arizona Contact: guyon@naoj.org 1 Large telescopes
SGL Coronagraph Simulation
 SGL Coronagraph Simulation Hanying Zhou Jet Propulsion Laboratory/California Institute of Technology, 4800 Oak Grove Drive, Pasadena, CA 91109 USA 2018. California Institute of Technology. Government Sponsorship
SGL Coronagraph Simulation Hanying Zhou Jet Propulsion Laboratory/California Institute of Technology, 4800 Oak Grove Drive, Pasadena, CA 91109 USA 2018. California Institute of Technology. Government Sponsorship
High-contrast Coronagraph Development in China for Direct Imaging of Extra-solar Planets
 High-contrast Coronagraph Development in China for Direct Imaging of Extra-solar Planets Jiangpei Dou 1, Deqing Ren 1,2, Yongtian Zhu 1, Xi Zhang 1 1 Astronomical Observatories/Nanjing Institute of Astronomical
High-contrast Coronagraph Development in China for Direct Imaging of Extra-solar Planets Jiangpei Dou 1, Deqing Ren 1,2, Yongtian Zhu 1, Xi Zhang 1 1 Astronomical Observatories/Nanjing Institute of Astronomical
Pupil Phase Apodization for Achromatic Imaging of Extra-solar Planets
 Pupil Phase Apodization for Achromatic Imaging of Extra-solar Planets by Weidong Yang A Dissertation Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy Physics
Pupil Phase Apodization for Achromatic Imaging of Extra-solar Planets by Weidong Yang A Dissertation Submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy Physics
Application of Precision Deformable Mirrors to Space Astronomy
 Application of Precision Deformable Mirrors to Space Astronomy John Trauger, Dwight Moody Brian Gordon, Yekta Gursel (JPL) Mark Ealey, Roger Bagwell (Xinetics) Workshop on Innovative Designs for the Next
Application of Precision Deformable Mirrors to Space Astronomy John Trauger, Dwight Moody Brian Gordon, Yekta Gursel (JPL) Mark Ealey, Roger Bagwell (Xinetics) Workshop on Innovative Designs for the Next
Pupil Replication. Frank Spaan Alan Greenaway Erwan Prot Vincent Mourai
 Pupil Replication Frank Spaan Alan Greenaway Erwan Prot Vincent Mourai PREDRIS Pupil Replication for Extreme Dynamic Range Imaging Spectroscopy Start: 1 April 25 Two years, funded by PPARC Publication:
Pupil Replication Frank Spaan Alan Greenaway Erwan Prot Vincent Mourai PREDRIS Pupil Replication for Extreme Dynamic Range Imaging Spectroscopy Start: 1 April 25 Two years, funded by PPARC Publication:
Introduction to the FFT
 Introduction to the FFT 1 Introduction Assume that we have a signal fx where x denotes time. We would like to represent fx as a linear combination of functions e πiax or, equivalently, sinπax and cosπax
Introduction to the FFT 1 Introduction Assume that we have a signal fx where x denotes time. We would like to represent fx as a linear combination of functions e πiax or, equivalently, sinπax and cosπax
Christian Marois Lawrence Livermore National Laboratory
 Christian Marois Lawrence Livermore National Laboratory -Detecting Exoplanets -Speckle noise attenuation techniques with specialized observation schemes and post-processing algorithms -Current On-sky performances
Christian Marois Lawrence Livermore National Laboratory -Detecting Exoplanets -Speckle noise attenuation techniques with specialized observation schemes and post-processing algorithms -Current On-sky performances
a Write down the coordinates of the point on the curve where t = 2. b Find the value of t at the point on the curve with coordinates ( 5 4, 8).
.") Worksheet A 1 A curve is given by the parametric equations x = t + 1, y = 4 t. a Write down the coordinates of the point on the curve where t =. b Find the value of t at the point on the curve with coordinates
Worksheet A 1 A curve is given by the parametric equations x = t + 1, y = 4 t. a Write down the coordinates of the point on the curve where t =. b Find the value of t at the point on the curve with coordinates
Terrestrial Planet Detection Approaches: Externally Occulted Hybrid Coronagraphs
 Terrestrial Planet Detection Approaches: Externally Occulted Hybrid Coronagraphs Richard G. Lyon a, John A. Gualtieri b, Ruslan Belikov a a NASA/Goddard Space Flight Center, Greenbelt, MD; b GST, Greenbelt,
Terrestrial Planet Detection Approaches: Externally Occulted Hybrid Coronagraphs Richard G. Lyon a, John A. Gualtieri b, Ruslan Belikov a a NASA/Goddard Space Flight Center, Greenbelt, MD; b GST, Greenbelt,
Understanding Speckle Noise and Dynamic Range in Coronagraphic Images
 Understanding Speckle Noise and Dynamic Range in Coronagraphic Images Remi Soummer American Museum of Natural History New York rsoummer@amnh.org Collaborators University of Nice: Claude Aime, Andre Ferrari
Understanding Speckle Noise and Dynamic Range in Coronagraphic Images Remi Soummer American Museum of Natural History New York rsoummer@amnh.org Collaborators University of Nice: Claude Aime, Andre Ferrari
6 The SVD Applied to Signal and Image Deblurring
 6 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
6 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
15-780: LinearProgramming
 15-780: LinearProgramming J. Zico Kolter February 1-3, 2016 1 Outline Introduction Some linear algebra review Linear programming Simplex algorithm Duality and dual simplex 2 Outline Introduction Some linear
15-780: LinearProgramming J. Zico Kolter February 1-3, 2016 1 Outline Introduction Some linear algebra review Linear programming Simplex algorithm Duality and dual simplex 2 Outline Introduction Some linear
High Dynamic Range and the Search for Planets
 Brown Dwarfs IAU Symposium, Vol. 211, 2003 E. L. Martín, ed. High Dynamic Range and the Search for Planets A. T. Tokunaga, C. Ftaclas, J. R. Kuhn, and P. Baudoz Institute for Astronomy, Univ. of Hawaii,
Brown Dwarfs IAU Symposium, Vol. 211, 2003 E. L. Martín, ed. High Dynamic Range and the Search for Planets A. T. Tokunaga, C. Ftaclas, J. R. Kuhn, and P. Baudoz Institute for Astronomy, Univ. of Hawaii,
8 The SVD Applied to Signal and Image Deblurring
 8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
8 The SVD Applied to Signal and Image Deblurring
 8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
8 The SVD Applied to Signal and Image Deblurring We will discuss the restoration of one-dimensional signals and two-dimensional gray-scale images that have been contaminated by blur and noise. After an
Problem structure in semidefinite programs arising in control and signal processing
 Problem structure in semidefinite programs arising in control and signal processing Lieven Vandenberghe Electrical Engineering Department, UCLA Joint work with: Mehrdad Nouralishahi, Tae Roh Semidefinite
Problem structure in semidefinite programs arising in control and signal processing Lieven Vandenberghe Electrical Engineering Department, UCLA Joint work with: Mehrdad Nouralishahi, Tae Roh Semidefinite
15. Conic optimization
 L. Vandenberghe EE236C (Spring 216) 15. Conic optimization conic linear program examples modeling duality 15-1 Generalized (conic) inequalities Conic inequality: a constraint x K where K is a convex cone
L. Vandenberghe EE236C (Spring 216) 15. Conic optimization conic linear program examples modeling duality 15-1 Generalized (conic) inequalities Conic inequality: a constraint x K where K is a convex cone
Exoplanet High Contrast Imaging: Space
 Exoplanet High Contrast Imaging: Space Eric Cady Jet Propulsion Laboratory, California Institute of Technology KISS Short Course: Mastering the Wave The Whys and Hows of Exoplanet Imaging August 22, 2016
Exoplanet High Contrast Imaging: Space Eric Cady Jet Propulsion Laboratory, California Institute of Technology KISS Short Course: Mastering the Wave The Whys and Hows of Exoplanet Imaging August 22, 2016
Linear Programming: Chapter 15 Structural Optimization
 Linear Programming: Chapter 15 Structural Optimization Robert J. Vanderbei November 4, 2007 Operations Research and Financial Engineering Princeton University Princeton, NJ 08544 http://www.princeton.edu/
Linear Programming: Chapter 15 Structural Optimization Robert J. Vanderbei November 4, 2007 Operations Research and Financial Engineering Princeton University Princeton, NJ 08544 http://www.princeton.edu/
14.1. Multiple Integration. Iterated Integrals and Area in the Plane. Iterated Integrals. Iterated Integrals. MAC2313 Calculus III - Chapter 14
 14 Multiple Integration 14.1 Iterated Integrals and Area in the Plane Objectives Evaluate an iterated integral. Use an iterated integral to find the area of a plane region. Copyright Cengage Learning.
14 Multiple Integration 14.1 Iterated Integrals and Area in the Plane Objectives Evaluate an iterated integral. Use an iterated integral to find the area of a plane region. Copyright Cengage Learning.
Imaging Survey for Faint Companions with Shaped Pupil Masks 1
 Imaging Survey for Faint Companions with Shaped Pupil Masks 1 Jian Ge, John Debes, Anne Watson & Abhijit Chakraborty 55 Davey Lab, Department of Astronomy & Astrophysics, Penn State University, University
Imaging Survey for Faint Companions with Shaped Pupil Masks 1 Jian Ge, John Debes, Anne Watson & Abhijit Chakraborty 55 Davey Lab, Department of Astronomy & Astrophysics, Penn State University, University
Fast Angular Synchronization for Phase Retrieval via Incomplete Information
 Fast Angular Synchronization for Phase Retrieval via Incomplete Information Aditya Viswanathan a and Mark Iwen b a Department of Mathematics, Michigan State University; b Department of Mathematics & Department
Fast Angular Synchronization for Phase Retrieval via Incomplete Information Aditya Viswanathan a and Mark Iwen b a Department of Mathematics, Michigan State University; b Department of Mathematics & Department
INTERIOR-POINT METHODS ROBERT J. VANDERBEI JOINT WORK WITH H. YURTTAN BENSON REAL-WORLD EXAMPLES BY J.O. COLEMAN, NAVAL RESEARCH LAB
 1 INTERIOR-POINT METHODS FOR SECOND-ORDER-CONE AND SEMIDEFINITE PROGRAMMING ROBERT J. VANDERBEI JOINT WORK WITH H. YURTTAN BENSON REAL-WORLD EXAMPLES BY J.O. COLEMAN, NAVAL RESEARCH LAB Outline 2 Introduction
1 INTERIOR-POINT METHODS FOR SECOND-ORDER-CONE AND SEMIDEFINITE PROGRAMMING ROBERT J. VANDERBEI JOINT WORK WITH H. YURTTAN BENSON REAL-WORLD EXAMPLES BY J.O. COLEMAN, NAVAL RESEARCH LAB Outline 2 Introduction
Chapter 5. Diffraction Part 2
 EE 430.43.00 06. nd Semester Chapter 5. Diffraction Part 06. 0. 0. Changhee Lee School of Electrical and Computer Engineering Seoul National niv. chlee7@snu.ac.kr /7 Changhee Lee, SN, Korea 5.5 Fresnel
EE 430.43.00 06. nd Semester Chapter 5. Diffraction Part 06. 0. 0. Changhee Lee School of Electrical and Computer Engineering Seoul National niv. chlee7@snu.ac.kr /7 Changhee Lee, SN, Korea 5.5 Fresnel
Complex Analysis, Stein and Shakarchi The Fourier Transform
 Complex Analysis, Stein and Shakarchi Chapter 4 The Fourier Transform Yung-Hsiang Huang 2017.11.05 1 Exercises 1. Suppose f L 1 (), and f 0. Show that f 0. emark 1. This proof is observed by Newmann (published
Complex Analysis, Stein and Shakarchi Chapter 4 The Fourier Transform Yung-Hsiang Huang 2017.11.05 1 Exercises 1. Suppose f L 1 (), and f 0. Show that f 0. emark 1. This proof is observed by Newmann (published
TEST CODE: MMA (Objective type) 2015 SYLLABUS
 2015 SYLLABUS") TEST CODE: MMA (Objective type) 2015 SYLLABUS Analytical Reasoning Algebra Arithmetic, geometric and harmonic progression. Continued fractions. Elementary combinatorics: Permutations and combinations,
TEST CODE: MMA (Objective type) 2015 SYLLABUS Analytical Reasoning Algebra Arithmetic, geometric and harmonic progression. Continued fractions. Elementary combinatorics: Permutations and combinations,
Optimization for Compressed Sensing
 Optimization for Compressed Sensing Robert J. Vanderbei 2014 March 21 Dept. of Industrial & Systems Engineering University of Florida http://www.princeton.edu/ rvdb Lasso Regression The problem is to solve
Optimization for Compressed Sensing Robert J. Vanderbei 2014 March 21 Dept. of Industrial & Systems Engineering University of Florida http://www.princeton.edu/ rvdb Lasso Regression The problem is to solve
Primal-Dual Interior-Point Methods for Linear Programming based on Newton s Method
 Primal-Dual Interior-Point Methods for Linear Programming based on Newton s Method Robert M. Freund March, 2004 2004 Massachusetts Institute of Technology. The Problem The logarithmic barrier approach
Primal-Dual Interior-Point Methods for Linear Programming based on Newton s Method Robert M. Freund March, 2004 2004 Massachusetts Institute of Technology. The Problem The logarithmic barrier approach
Lecture4 INF-MAT : 5. Fast Direct Solution of Large Linear Systems
 Lecture4 INF-MAT 4350 2010: 5. Fast Direct Solution of Large Linear Systems Tom Lyche Centre of Mathematics for Applications, Department of Informatics, University of Oslo September 16, 2010 Test Matrix
Lecture4 INF-MAT 4350 2010: 5. Fast Direct Solution of Large Linear Systems Tom Lyche Centre of Mathematics for Applications, Department of Informatics, University of Oslo September 16, 2010 Test Matrix
An Optical/UV Space Coronagraph Concept for the Terrestrial Planet Finder
 An Optical/UV Space Coronagraph Concept for the Terrestrial Planet Finder N.J. Kasdin 1, R.A. Brown 2, C.J. Burrows 3, S. Kilston 4, M. Kuchner 5, M.G. Littman 1, M.C. Noecker 4, S. Seager 6,D.N. Spergel
An Optical/UV Space Coronagraph Concept for the Terrestrial Planet Finder N.J. Kasdin 1, R.A. Brown 2, C.J. Burrows 3, S. Kilston 4, M. Kuchner 5, M.G. Littman 1, M.C. Noecker 4, S. Seager 6,D.N. Spergel
Fast ADMM for Sum of Squares Programs Using Partial Orthogonality
 Fast ADMM for Sum of Squares Programs Using Partial Orthogonality Antonis Papachristodoulou Department of Engineering Science University of Oxford www.eng.ox.ac.uk/control/sysos antonis@eng.ox.ac.uk with
Fast ADMM for Sum of Squares Programs Using Partial Orthogonality Antonis Papachristodoulou Department of Engineering Science University of Oxford www.eng.ox.ac.uk/control/sysos antonis@eng.ox.ac.uk with
III. Applications in convex optimization
 III. Applications in convex optimization nonsymmetric interior-point methods partial separability and decomposition partial separability first order methods interior-point methods Conic linear optimization
III. Applications in convex optimization nonsymmetric interior-point methods partial separability and decomposition partial separability first order methods interior-point methods Conic linear optimization
Fourier Bases on the Skewed Sierpinski Gasket
 Fourier Bases on the Skewed Sierpinski Gasket Calvin Hotchkiss University Nebraska-Iowa Functional Analysis Seminar November 5, 2016 Part 1: A Fast Fourier Transform for Fractal Approximations The Fractal
Fourier Bases on the Skewed Sierpinski Gasket Calvin Hotchkiss University Nebraska-Iowa Functional Analysis Seminar November 5, 2016 Part 1: A Fast Fourier Transform for Fractal Approximations The Fractal
The moment-lp and moment-sos approaches
 The moment-lp and moment-sos approaches LAAS-CNRS and Institute of Mathematics, Toulouse, France CIRM, November 2013 Semidefinite Programming Why polynomial optimization? LP- and SDP- CERTIFICATES of POSITIVITY
The moment-lp and moment-sos approaches LAAS-CNRS and Institute of Mathematics, Toulouse, France CIRM, November 2013 Semidefinite Programming Why polynomial optimization? LP- and SDP- CERTIFICATES of POSITIVITY
Physics I : Oscillations and Waves Prof. S. Bharadwaj Department of Physics and Meteorology Indian Institute of Technology, Kharagpur
 Physics I : Oscillations and Waves Prof. S. Bharadwaj Department of Physics and Meteorology Indian Institute of Technology, Kharagpur Lecture - 21 Diffraction-II Good morning. In the last class, we had
Physics I : Oscillations and Waves Prof. S. Bharadwaj Department of Physics and Meteorology Indian Institute of Technology, Kharagpur Lecture - 21 Diffraction-II Good morning. In the last class, we had
ADVANCING HIGH-CONTRAST ADAPTIVE OPTICS
 ADVANCING HIGH-CONTRAST ADAPTIVE OPTICS S. Mark Ammons LLNL Bruce Macintosh Stanford University Lisa Poyneer LLNL Dave Palmer LLNL and the Gemini Planet Imager Team ABSTRACT A long-standing challenge has
ADVANCING HIGH-CONTRAST ADAPTIVE OPTICS S. Mark Ammons LLNL Bruce Macintosh Stanford University Lisa Poyneer LLNL Dave Palmer LLNL and the Gemini Planet Imager Team ABSTRACT A long-standing challenge has
Fast and Robust Phase Retrieval
 Fast and Robust Phase Retrieval Aditya Viswanathan aditya@math.msu.edu CCAM Lunch Seminar Purdue University April 18 2014 0 / 27 Joint work with Yang Wang Mark Iwen Research supported in part by National
Fast and Robust Phase Retrieval Aditya Viswanathan aditya@math.msu.edu CCAM Lunch Seminar Purdue University April 18 2014 0 / 27 Joint work with Yang Wang Mark Iwen Research supported in part by National
EE 367 / CS 448I Computational Imaging and Display Notes: Image Deconvolution (lecture 6)
") EE 367 / CS 448I Computational Imaging and Display Notes: Image Deconvolution (lecture 6) Gordon Wetzstein gordon.wetzstein@stanford.edu This document serves as a supplement to the material discussed in
EE 367 / CS 448I Computational Imaging and Display Notes: Image Deconvolution (lecture 6) Gordon Wetzstein gordon.wetzstein@stanford.edu This document serves as a supplement to the material discussed in
optical / IR: photon counting flux density or magnitude corresponds to number of electrons per second (mean rate)
") optical / IR: photon counting flux density or magnitude corresponds to number of electrons per second (mean rate) N electrons/sec = ɛ F λ λa hc/λ 0 efficiency factor flux density x bandpass x collecting
optical / IR: photon counting flux density or magnitude corresponds to number of electrons per second (mean rate) N electrons/sec = ɛ F λ λa hc/λ 0 efficiency factor flux density x bandpass x collecting
Design reference mission construction for planet finders
 Design reference mission construction for planet finders SPIE Astronomical Telescopes and Instrumentation Dmitry Savransky and N. Jeremy Kasdin Department of Mechanical and Aerospace Engineering Princeton
Design reference mission construction for planet finders SPIE Astronomical Telescopes and Instrumentation Dmitry Savransky and N. Jeremy Kasdin Department of Mechanical and Aerospace Engineering Princeton
Sparsity and Compressed Sensing
 Sparsity and Compressed Sensing Jalal Fadili Normandie Université-ENSICAEN, GREYC Mathematical coffees 2017 Recap: linear inverse problems Dictionary Sensing Sensing Sensing = y m 1 H m n y y 2 R m H A
Sparsity and Compressed Sensing Jalal Fadili Normandie Université-ENSICAEN, GREYC Mathematical coffees 2017 Recap: linear inverse problems Dictionary Sensing Sensing Sensing = y m 1 H m n y y 2 R m H A
GPI Feasibility and P2 Checks
 GPI Feasibility and Phase II Checks The goal of this presentation is to be able to do a proper technical asessment of a GPI proposal and spot the most common GPI Phase II issues. It should be noted that
GPI Feasibility and Phase II Checks The goal of this presentation is to be able to do a proper technical asessment of a GPI proposal and spot the most common GPI Phase II issues. It should be noted that
Introduction to Compressed Sensing
 Introduction to Compressed Sensing Alejandro Parada, Gonzalo Arce University of Delaware August 25, 2016 Motivation: Classical Sampling 1 Motivation: Classical Sampling Issues Some applications Radar Spectral
Introduction to Compressed Sensing Alejandro Parada, Gonzalo Arce University of Delaware August 25, 2016 Motivation: Classical Sampling 1 Motivation: Classical Sampling Issues Some applications Radar Spectral
Kernel Method: Data Analysis with Positive Definite Kernels
 Kernel Method: Data Analysis with Positive Definite Kernels 2. Positive Definite Kernel and Reproducing Kernel Hilbert Space Kenji Fukumizu The Institute of Statistical Mathematics. Graduate University
Kernel Method: Data Analysis with Positive Definite Kernels 2. Positive Definite Kernel and Reproducing Kernel Hilbert Space Kenji Fukumizu The Institute of Statistical Mathematics. Graduate University
New Stable Periodic Solutions to the n-body Problem
 New Stable Periodic Solutions to the n-body Problem Robert J. Vanderbei 2014 Feb 17 Program in Applied and Computational Mathematics Princeton University http://www.princeton.edu/ rvdb Lagrange Style Orbits
New Stable Periodic Solutions to the n-body Problem Robert J. Vanderbei 2014 Feb 17 Program in Applied and Computational Mathematics Princeton University http://www.princeton.edu/ rvdb Lagrange Style Orbits
Lecture 2: Linear Algebra Review
 EE 227A: Convex Optimization and Applications January 19 Lecture 2: Linear Algebra Review Lecturer: Mert Pilanci Reading assignment: Appendix C of BV. Sections 2-6 of the web textbook 1 2.1 Vectors 2.1.1
EE 227A: Convex Optimization and Applications January 19 Lecture 2: Linear Algebra Review Lecturer: Mert Pilanci Reading assignment: Appendix C of BV. Sections 2-6 of the web textbook 1 2.1 Vectors 2.1.1
TEST CODE: MIII (Objective type) 2010 SYLLABUS
 2010 SYLLABUS") TEST CODE: MIII (Objective type) 200 SYLLABUS Algebra Permutations and combinations. Binomial theorem. Theory of equations. Inequalities. Complex numbers and De Moivre s theorem. Elementary set theory.
TEST CODE: MIII (Objective type) 200 SYLLABUS Algebra Permutations and combinations. Binomial theorem. Theory of equations. Inequalities. Complex numbers and De Moivre s theorem. Elementary set theory.
The uniform uncertainty principle and compressed sensing Harmonic analysis and related topics, Seville December 5, 2008
 The uniform uncertainty principle and compressed sensing Harmonic analysis and related topics, Seville December 5, 2008 Emmanuel Candés (Caltech), Terence Tao (UCLA) 1 Uncertainty principles A basic principle
The uniform uncertainty principle and compressed sensing Harmonic analysis and related topics, Seville December 5, 2008 Emmanuel Candés (Caltech), Terence Tao (UCLA) 1 Uncertainty principles A basic principle
Active wavefront control for high contrast exoplanet imaging from space
 Active wavefront control for high contrast exoplanet imaging from space John Trauger Spirit of Lyot Conference U.C. Berkeley 6 June 2007 Testbed operations and modeling at JPL: John Trauger, Brian Kern,
Active wavefront control for high contrast exoplanet imaging from space John Trauger Spirit of Lyot Conference U.C. Berkeley 6 June 2007 Testbed operations and modeling at JPL: John Trauger, Brian Kern,
6-1 The Positivstellensatz P. Parrilo and S. Lall, ECC
 6-1 The Positivstellensatz P. Parrilo and S. Lall, ECC 2003 2003.09.02.10 6. The Positivstellensatz Basic semialgebraic sets Semialgebraic sets Tarski-Seidenberg and quantifier elimination Feasibility
6-1 The Positivstellensatz P. Parrilo and S. Lall, ECC 2003 2003.09.02.10 6. The Positivstellensatz Basic semialgebraic sets Semialgebraic sets Tarski-Seidenberg and quantifier elimination Feasibility
! Circular Convolution. " Linear convolution with circular convolution. ! Discrete Fourier Transform. " Linear convolution through circular
 Previously ESE 531: Digital Signal Processing Lec 22: April 18, 2017 Fast Fourier Transform (con t)! Circular Convolution " Linear convolution with circular convolution! Discrete Fourier Transform " Linear
Previously ESE 531: Digital Signal Processing Lec 22: April 18, 2017 Fast Fourier Transform (con t)! Circular Convolution " Linear convolution with circular convolution! Discrete Fourier Transform " Linear
Exoplanets Direct imaging. Direct method of exoplanet detection. Direct imaging: observational challenges
 Black body flux (in units 10-26 W m -2 Hz -1 ) of some Solar System bodies as seen from 10 pc. A putative hot Jupiter is also shown. The planets have two peaks in their spectra. The short-wavelength peak
Black body flux (in units 10-26 W m -2 Hz -1 ) of some Solar System bodies as seen from 10 pc. A putative hot Jupiter is also shown. The planets have two peaks in their spectra. The short-wavelength peak
From structures to heuristics to global solvers
 From structures to heuristics to global solvers Timo Berthold Zuse Institute Berlin DFG Research Center MATHEON Mathematics for key technologies OR2013, 04/Sep/13, Rotterdam Outline From structures to
From structures to heuristics to global solvers Timo Berthold Zuse Institute Berlin DFG Research Center MATHEON Mathematics for key technologies OR2013, 04/Sep/13, Rotterdam Outline From structures to
Size properties of wavelet packets generated using finite filters
 Rev. Mat. Iberoamericana, 18 (2002, 249 265 Size properties of wavelet packets generated using finite filters Morten Nielsen Abstract We show that asymptotic estimates for the growth in L p (R- norm of
Rev. Mat. Iberoamericana, 18 (2002, 249 265 Size properties of wavelet packets generated using finite filters Morten Nielsen Abstract We show that asymptotic estimates for the growth in L p (R- norm of
Statistics of undeveloped speckles in partially polarized light
 1st AO4ELT conference, 09006 (2010) DOI:10.1051/ao4elt/201009006 Owned by the authors, published by EDP Sciences, 2010 Statistics of undeveloped speckles in partially polarized light Natalia Yaitskova
1st AO4ELT conference, 09006 (2010) DOI:10.1051/ao4elt/201009006 Owned by the authors, published by EDP Sciences, 2010 Statistics of undeveloped speckles in partially polarized light Natalia Yaitskova
A new class of pseudodifferential operators with mixed homogenities
 A new class of pseudodifferential operators with mixed homogenities Po-Lam Yung University of Oxford Jan 20, 2014 Introduction Given a smooth distribution of hyperplanes on R N (or more generally on a
A new class of pseudodifferential operators with mixed homogenities Po-Lam Yung University of Oxford Jan 20, 2014 Introduction Given a smooth distribution of hyperplanes on R N (or more generally on a
Commissioning of the Hanle Autoguider
 Commissioning of the Hanle Autoguider Copenhagen University Observatory Edited November 10, 2005 Figure 1: First light image for the Hanle autoguider, obtained on September 17, 2005. A 5 second exposure
Commissioning of the Hanle Autoguider Copenhagen University Observatory Edited November 10, 2005 Figure 1: First light image for the Hanle autoguider, obtained on September 17, 2005. A 5 second exposure
Research Reports on Mathematical and Computing Sciences
 ISSN 1342-284 Research Reports on Mathematical and Computing Sciences Exploiting Sparsity in Linear and Nonlinear Matrix Inequalities via Positive Semidefinite Matrix Completion Sunyoung Kim, Masakazu
ISSN 1342-284 Research Reports on Mathematical and Computing Sciences Exploiting Sparsity in Linear and Nonlinear Matrix Inequalities via Positive Semidefinite Matrix Completion Sunyoung Kim, Masakazu
Two-Dimensional Signal Processing and Image De-noising
 Two-Dimensional Signal Processing and Image De-noising Alec Koppel, Mark Eisen, Alejandro Ribeiro March 12, 2018 Until now, we considered (one-dimensional) discrete signals of the form x : [0, N 1] C of
Two-Dimensional Signal Processing and Image De-noising Alec Koppel, Mark Eisen, Alejandro Ribeiro March 12, 2018 Until now, we considered (one-dimensional) discrete signals of the form x : [0, N 1] C of
A PROJECTED HESSIAN GAUSS-NEWTON ALGORITHM FOR SOLVING SYSTEMS OF NONLINEAR EQUATIONS AND INEQUALITIES
 IJMMS 25:6 2001) 397 409 PII. S0161171201002290 http://ijmms.hindawi.com Hindawi Publishing Corp. A PROJECTED HESSIAN GAUSS-NEWTON ALGORITHM FOR SOLVING SYSTEMS OF NONLINEAR EQUATIONS AND INEQUALITIES
IJMMS 25:6 2001) 397 409 PII. S0161171201002290 http://ijmms.hindawi.com Hindawi Publishing Corp. A PROJECTED HESSIAN GAUSS-NEWTON ALGORITHM FOR SOLVING SYSTEMS OF NONLINEAR EQUATIONS AND INEQUALITIES
The shapes of faint galaxies: A window unto mass in the universe
 Lecture 15 The shapes of faint galaxies: A window unto mass in the universe Intensity weighted second moments Optimal filtering Weak gravitational lensing Shear components Shear detection Inverse problem:
Lecture 15 The shapes of faint galaxies: A window unto mass in the universe Intensity weighted second moments Optimal filtering Weak gravitational lensing Shear components Shear detection Inverse problem:
CSCI 250: Intro to Robotics. Spring Term 2017 Prof. Levy. Computer Vision: A Brief Survey
 CSCI 25: Intro to Robotics Spring Term 27 Prof. Levy Computer Vision: A Brief Survey What Is Computer Vision? Higher-order tasks Face recognition Object recognition (Deep Learning) What Is Computer Vision?
CSCI 25: Intro to Robotics Spring Term 27 Prof. Levy Computer Vision: A Brief Survey What Is Computer Vision? Higher-order tasks Face recognition Object recognition (Deep Learning) What Is Computer Vision?
( nonlinear constraints)
") Wavelet Design & Applications Basic requirements: Admissibility (single constraint) Orthogonality ( nonlinear constraints) Sparse Representation Smooth functions well approx. by Fourier High-frequency
Wavelet Design & Applications Basic requirements: Admissibility (single constraint) Orthogonality ( nonlinear constraints) Sparse Representation Smooth functions well approx. by Fourier High-frequency
Numerical Methods I Non-Square and Sparse Linear Systems
 Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
Numerical Methods I Non-Square and Sparse Linear Systems Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 September 25th, 2014 A. Donev (Courant
Inderjit Dhillon The University of Texas at Austin
 Inderjit Dhillon The University of Texas at Austin ( Universidad Carlos III de Madrid; 15 th June, 2012) (Based on joint work with J. Brickell, S. Sra, J. Tropp) Introduction 2 / 29 Notion of distance
Inderjit Dhillon The University of Texas at Austin ( Universidad Carlos III de Madrid; 15 th June, 2012) (Based on joint work with J. Brickell, S. Sra, J. Tropp) Introduction 2 / 29 Notion of distance
Optimality, Duality, Complementarity for Constrained Optimization
 Optimality, Duality, Complementarity for Constrained Optimization Stephen Wright University of Wisconsin-Madison May 2014 Wright (UW-Madison) Optimality, Duality, Complementarity May 2014 1 / 41 Linear
Optimality, Duality, Complementarity for Constrained Optimization Stephen Wright University of Wisconsin-Madison May 2014 Wright (UW-Madison) Optimality, Duality, Complementarity May 2014 1 / 41 Linear
The SPICA Coronagraph
 The SPICA Coronagraph 2007, Jun 7 th, UC BERKELEY K. Enya 1, L. Abe 2, S. Tanaka 1, T. Nakagawa 1, M. Tamura 2, H. Kataza 1, O. Guyon 3, SPICA Working Group ( 1: ISAS/JAXA, 2: NAOJ, 3: NAOJ/SUBARU observatory)
The SPICA Coronagraph 2007, Jun 7 th, UC BERKELEY K. Enya 1, L. Abe 2, S. Tanaka 1, T. Nakagawa 1, M. Tamura 2, H. Kataza 1, O. Guyon 3, SPICA Working Group ( 1: ISAS/JAXA, 2: NAOJ, 3: NAOJ/SUBARU observatory)
CSC Linear Programming and Combinatorial Optimization Lecture 10: Semidefinite Programming
 CSC2411 - Linear Programming and Combinatorial Optimization Lecture 10: Semidefinite Programming Notes taken by Mike Jamieson March 28, 2005 Summary: In this lecture, we introduce semidefinite programming
CSC2411 - Linear Programming and Combinatorial Optimization Lecture 10: Semidefinite Programming Notes taken by Mike Jamieson March 28, 2005 Summary: In this lecture, we introduce semidefinite programming
Transform methods. and its inverse can be used to analyze certain time-dependent PDEs. f(x) sin(sxπ/(n + 1))
 sin(sxπ/(n + 1))") AMSC/CMSC 661 Scientific Computing II Spring 2010 Transforms and Wavelets Dianne P. O Leary c 2005,2010 Some motivations: Transform methods The Fourier transform Fv(ξ) = ˆv(ξ) = v(x)e ix ξ dx, R d and
AMSC/CMSC 661 Scientific Computing II Spring 2010 Transforms and Wavelets Dianne P. O Leary c 2005,2010 Some motivations: Transform methods The Fourier transform Fv(ξ) = ˆv(ξ) = v(x)e ix ξ dx, R d and
6.1 Matrices. Definition: A Matrix A is a rectangular array of the form. A 11 A 12 A 1n A 21. A 2n. A m1 A m2 A mn A 22.
 61 Matrices Definition: A Matrix A is a rectangular array of the form A 11 A 12 A 1n A 21 A 22 A 2n A m1 A m2 A mn The size of A is m n, where m is the number of rows and n is the number of columns The
61 Matrices Definition: A Matrix A is a rectangular array of the form A 11 A 12 A 1n A 21 A 22 A 2n A m1 A m2 A mn The size of A is m n, where m is the number of rows and n is the number of columns The
High contrast imaging at 3-5 microns. Philip M. Hinz University of Arizona Matt Kenworthy, Ari Heinze, John Codona, Roger Angel
 High contrast imaging at 3-5 microns Philip M. Hinz University of Arizona Matt Kenworthy, Ari Heinze, John Codona, Roger Angel University of Arizona ABSTRACT The 6.5 m MMT with its integrated deformable
High contrast imaging at 3-5 microns Philip M. Hinz University of Arizona Matt Kenworthy, Ari Heinze, John Codona, Roger Angel University of Arizona ABSTRACT The 6.5 m MMT with its integrated deformable
High Contrast Imaging: New Techniques and Scientific Perspectives for ELTs
 High Contrast Imaging: New Techniques and Scientific Perspectives for ELTs Is there a path to life What game changing finding with ELTs? technologies can get us there? Olivier Guyon Subaru Telescope &
High Contrast Imaging: New Techniques and Scientific Perspectives for ELTs Is there a path to life What game changing finding with ELTs? technologies can get us there? Olivier Guyon Subaru Telescope &
COMSOL Design Tool: Simulations of Optical Components Week 6: Waveguides and propagation S matrix
 COMSOL Design Tool: Simulations of Optical Components Week 6: Waveguides and propagation S matrix Nikola Dordevic and Yannick Salamin 30.10.2017 1 Content Revision Wave Propagation Losses Wave Propagation
COMSOL Design Tool: Simulations of Optical Components Week 6: Waveguides and propagation S matrix Nikola Dordevic and Yannick Salamin 30.10.2017 1 Content Revision Wave Propagation Losses Wave Propagation
MATH 220 solution to homework 4
 MATH 22 solution to homework 4 Problem. Define v(t, x) = u(t, x + bt), then v t (t, x) a(x + u bt) 2 (t, x) =, t >, x R, x2 v(, x) = f(x). It suffices to show that v(t, x) F = max y R f(y). We consider
MATH 22 solution to homework 4 Problem. Define v(t, x) = u(t, x + bt), then v t (t, x) a(x + u bt) 2 (t, x) =, t >, x R, x2 v(, x) = f(x). It suffices to show that v(t, x) F = max y R f(y). We consider
CSCI5654 (Linear Programming, Fall 2013) Lecture-8. Lecture 8 Slide# 1
 Lecture-8. Lecture 8 Slide# 1") CSCI5654 (Linear Programming, Fall 2013) Lecture-8 Lecture 8 Slide# 1 Today s Lecture 1. Recap of dual variables and strong duality. 2. Complementary Slackness Theorem. 3. Interpretation of dual variables.
CSCI5654 (Linear Programming, Fall 2013) Lecture-8 Lecture 8 Slide# 1 Today s Lecture 1. Recap of dual variables and strong duality. 2. Complementary Slackness Theorem. 3. Interpretation of dual variables.
Constrained optimization
 Constrained optimization DS-GA 1013 / MATH-GA 2824 Optimization-based Data Analysis http://www.cims.nyu.edu/~cfgranda/pages/obda_fall17/index.html Carlos Fernandez-Granda Compressed sensing Convex constrained
Constrained optimization DS-GA 1013 / MATH-GA 2824 Optimization-based Data Analysis http://www.cims.nyu.edu/~cfgranda/pages/obda_fall17/index.html Carlos Fernandez-Granda Compressed sensing Convex constrained
Linear Programming: Chapter 5 Duality
 Linear Programming: Chapter 5 Duality Robert J. Vanderbei September 30, 2010 Slides last edited on October 5, 2010 Operations Research and Financial Engineering Princeton University Princeton, NJ 08544
Linear Programming: Chapter 5 Duality Robert J. Vanderbei September 30, 2010 Slides last edited on October 5, 2010 Operations Research and Financial Engineering Princeton University Princeton, NJ 08544
How Giovanni s Balloon Borne Telescope Contributed to Today s Search for Life on Exoplanets
 How Giovanni s Balloon Borne Telescope Contributed to Today s Search for Life on Exoplanets Wesley A. Jet Propulsion Laboratory, California Ins:tute of Technology Symposium for Giovanni Fazio Harvard Smithsonian
How Giovanni s Balloon Borne Telescope Contributed to Today s Search for Life on Exoplanets Wesley A. Jet Propulsion Laboratory, California Ins:tute of Technology Symposium for Giovanni Fazio Harvard Smithsonian
The Lyot Project Status and Results
 The Lyot Project Status and Results Anand Sivaramakrishnan American Museum of Natural History NSF Center for Adaptive Optics Stony Brook University 941-channel AO on 3.6m AEOS telescope FPM 0.35 in H-band
The Lyot Project Status and Results Anand Sivaramakrishnan American Museum of Natural History NSF Center for Adaptive Optics Stony Brook University 941-channel AO on 3.6m AEOS telescope FPM 0.35 in H-band