MEG 741 Energy and Variational Methods in Mechanics I
|
|
|
- Ronald Pitts
- 5 years ago
- Views:
Transcription
1 EG 74 Energy nd rton ethod n echnc I Brendn J. O Tooe, Ph.D. Aocte Profeor of echnc Engneerng Hord R. Hughe Coege of Engneerng Unerty of Ned eg TBE B- (7) j@me.un.edu Chter 4: Structur Any ethod I: Bem Proem -
2 C Outne Sgn Conenton Fundment Reton Eement trce Stffne trce -
3 Sgn Conenton for Bem Eement N z x + + N Sgn Conenton N z x + + N Sgn Conenton -


4 Sgn Conenton for Bem Proem Sgn Conenton : Uuy ued hen nyzng em. The force on the end of the dgrm rereent the ntern recton Sgn Conenton : Uuy ued for Bem Sytem. Dcement nd nge re the me for oth conenton. -4


5 Stchng Beteen Sgn Conenton Ue to rereent force nd moment hen ung gn conenton Ue to rereent force nd moment hen ung gn conenton Equton for conertng gn conenton to gn conenton. -5
6 - the em for Sgn Conenton. the force (nd moment) of degnte the em for Sgn Conenton. the force (nd moment) of degnte K K Summry of Force ector Notton
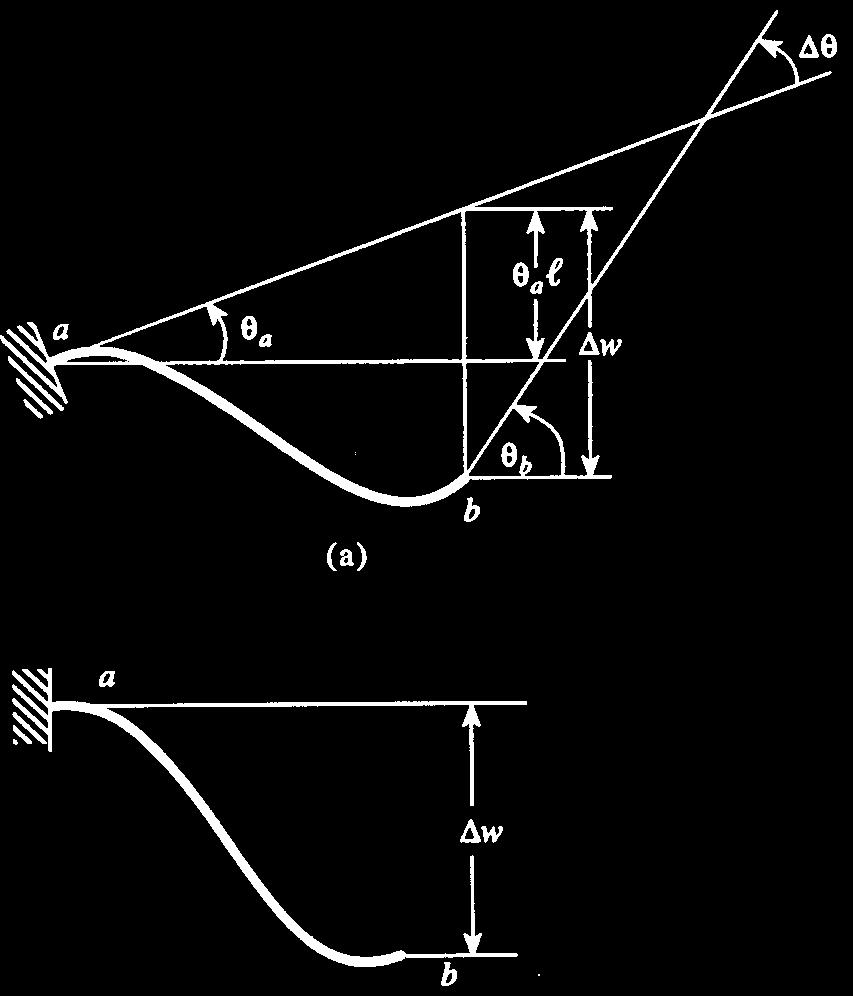
7 Fundment Reton for Bem Eement Sgn Conenton Equrum Reton Wrte Force nd oment equrum equton: + N Geometry of Deformton Shon ter ter Shon ter N -7
8 Geometry of Deformton -8

9 ter -9
10 Summry of Fundment Equrum Reton Geometry of Deformton ter -
11 - Trnfer trx for Bem The mtrx U trnfer the re,,, nd from xx to xx. The ector z of dcement nd force ced the tte ector ecue t fuy decre the reone or tte of the em. z U z
12 - Trnfer trx (contnued) ( ) + + U U U U U U The ector rereent dcement nd oe. The ector rereent force nd moment (th Sgn Conenton ). U rereent rgd ody dcement. U rereent mter. U (n th ce), rereent nfuence of rng, foundton, etc. U rereent equrum.
13 - Stffne trx The tffne mtrx for eement rete the dcement (nd oe) to the force (nd moment) t nd. The tffne mtrx defned ung force ector of Sgn Conenton
14 -4 Stffne trx (contnued) To comete the defnton of n eement, ector, rereentng ed od houd e dded to Ech term n the tffne mtrx, j, cn e condered the force deeoed t coordnte due to unt dcement t coordnte j, th other dcement equ to zero.
15 Fexty trx The fexty mtrx for eement rete the force (nd moment) to the dcement (nd oe) t nd. The fexty mtrx f the nere of the tffne mtrx. The reou tffne mtrx rete of the dcement to of the force, thout regrd to ho the eement uorted or contrned. The rgd ody dcement term cue ome of the ro or coumn of the tffne mtrx to e nery deendent. A fexty mtrx cnnot e found for the reou tffne mtrx ecue the nery deendent term me the mtrx ngur nd t cn not e nerted. A fexty mtrx cn e defned for reduced tffne mtrx tht defned for em th ecfc contrnt or oundry condton. -5
16 - Reduced Stffne trx nd Fexty trx for Smy Suorted Bem 4 4 equton. reducedytemof Exmnetheecondnd fourth ro 4 4 GenerStffne trx for Bem Eement: R R R R R R f
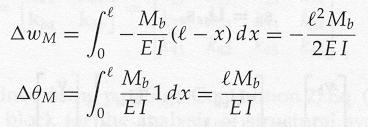
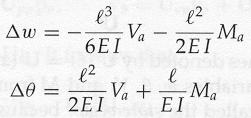
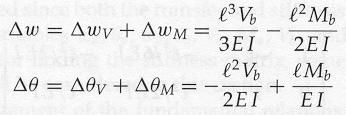
17 Exme: Fnd the reduced tffne mtrx retng force t the end of cnteer em to the dcement t the end. nd f f f f It uuy eer to determne the term n the fexty mtrx. Ech term, f j, the dcement t degree-of-freedom (DOF) due to unt force ed t DOF j. The degree of freedom for th roem re nd. f dcement due to unt her force. f dcement due to unt endng moment. f oe (rotton) due to unt her force. f oe (rotton) due to unt endng moment. -7
18 Exme: Dcement nd oe t the end of cnteer th n ed unt her force nd n ed unt endng moment. Deformed he f f Defecton nd oe for thee roem cn e found ung ny method from: Deformed he f f echnc of ter, Etcty theory, or Energy ethod -8
19 -9 Exme (Contnued): Fnd the reduced tffne mtrx retng force t the end of cnteer em to the dcement t the end. The fexty mtrx emed from the term found on the reou ge. f f f f The tffne mtrx found y nertng the fexty mtrx. 4
20 Stffne trx Bed on Poynom Tr Functon For em eement, t oe to determne tffne mtrx fry my from three dfferent ny technque: mechnc of mter, theory of etcty, energy method. For ome eement, t dffcut to determne the exct outon needed to formute the tffne mtrx. In thee ce, t oe to determne tffne mtrx y umng the dcement re ome oynom functon of oton. Th oynom tr functon method cn e ued to dere the me tffne mtrx defned reouy for em eement. -
21 Next C Stffne trx Bed on Poynom Tr Functon -
Dynamics of Linked Hierarchies. Constrained dynamics The Featherstone equations
 Dynm o Lnke Herrhe Contrne ynm The Fethertone equton Contrne ynm pply ore to one omponent, other omponent repotone, rom ner to r, to ty tne ontrnt F Contrne Boy Dynm Chpter 4 n: Mrth mpule-be Dynm Smulton
Dynm o Lnke Herrhe Contrne ynm The Fethertone equton Contrne ynm pply ore to one omponent, other omponent repotone, rom ner to r, to ty tne ontrnt F Contrne Boy Dynm Chpter 4 n: Mrth mpule-be Dynm Smulton
a = Acceleration Linear Motion Acceleration Changing Velocity All these Velocities? Acceleration and Freefall Physics 114
 Lner Accelerton nd Freell Phyc 4 Eyre Denton o ccelerton Both de o equton re equl Mgntude Unt Drecton (t ector!) Accelerton Mgntude Mgntude Unt Unt Drecton Drecton 4/3/07 Module 3-Phy4-Eyre 4/3/07 Module
Lner Accelerton nd Freell Phyc 4 Eyre Denton o ccelerton Both de o equton re equl Mgntude Unt Drecton (t ector!) Accelerton Mgntude Mgntude Unt Unt Drecton Drecton 4/3/07 Module 3-Phy4-Eyre 4/3/07 Module
x=0 x=0 Positive Negative Positions Positions x=0 Positive Negative Positions Positions
 Knemtc Quntte Lner Moton Phyc 101 Eyre Tme Intnt t Fundmentl Tme Interl Defned Poton x Fundmentl Dplcement Defned Aerge Velocty g Defned Aerge Accelerton g Defned Knemtc Quntte Scler: Mgntude Tme Intnt,
Knemtc Quntte Lner Moton Phyc 101 Eyre Tme Intnt t Fundmentl Tme Interl Defned Poton x Fundmentl Dplcement Defned Aerge Velocty g Defned Aerge Accelerton g Defned Knemtc Quntte Scler: Mgntude Tme Intnt,
F í s. i c HARMONIC MOTION. A p l. i c a U C L M
 HRONI OTION 070311 1 Hooke w hrterzton of Sme Hrmon oton (SH) Veoty n eerton n hrmon moton. Exeme. Horzont n vert rng Sme enuum Phy enuum Energy n hrmon moton Dme hrmon moton Hooke w Srng ontnt The fore
HRONI OTION 070311 1 Hooke w hrterzton of Sme Hrmon oton (SH) Veoty n eerton n hrmon moton. Exeme. Horzont n vert rng Sme enuum Phy enuum Energy n hrmon moton Dme hrmon moton Hooke w Srng ontnt The fore
Robot Dynamics. Hesheng Wang Dept. of Automation Shanghai Jiao Tong University
 Robot Dyn Heheng Wng Dept. of Autoton Shngh Jo Tong Unverty Wht Robot Dyn? Robot dyn tude the reton between robot oton nd fore nd oent tng on the robot. x Rotton bout Fxed Ax The veoty v n be deterned
Robot Dyn Heheng Wng Dept. of Autoton Shngh Jo Tong Unverty Wht Robot Dyn? Robot dyn tude the reton between robot oton nd fore nd oent tng on the robot. x Rotton bout Fxed Ax The veoty v n be deterned
ELASTIC-VISCOPLASTIC HOMOGENIZATION ANALYSIS OF PLAIN-WOVEN GFRP LAMINATES WITH MISALIGNED PLAIN FABRICS
 8 TH INTERNTIONL CONFERENCE ON COMPOSITE MTERILS ELSTIC-VISCOPLSTIC HOMOGENIZTION NLYSIS OF PLIN-WOVEN GFRP LMINTES WITH MISLIGNED PLIN FBRICS S. Knmru, T. Mtsud * Deprtment of Engneerng Mechncs nd Energy,
8 TH INTERNTIONL CONFERENCE ON COMPOSITE MTERILS ELSTIC-VISCOPLSTIC HOMOGENIZTION NLYSIS OF PLIN-WOVEN GFRP LMINTES WITH MISLIGNED PLIN FBRICS S. Knmru, T. Mtsud * Deprtment of Engneerng Mechncs nd Energy,
Neural Network (Basic Ideas) Hung-yi Lee
 Hung-yi Lee") Neur Network (Bsc Ides) Hung-y Lee Lernng Lookng for Functon Speech Recognton f Hndwrtten Recognton f Wether forecst f Py vdeo gmes f wether tody Postons nd numer of enemes 你好 sunny tomorrow fre Frmework
Neur Network (Bsc Ides) Hung-y Lee Lernng Lookng for Functon Speech Recognton f Hndwrtten Recognton f Wether forecst f Py vdeo gmes f wether tody Postons nd numer of enemes 你好 sunny tomorrow fre Frmework
Kinematics Quantities. Linear Motion. Coordinate System. Kinematics Quantities. Velocity. Position. Don t Forget Units!
 Knemtc Quntte Lner Phyc 11 Eyre Tme Intnt t Fundmentl Tme Interl t Dened Poton Fundmentl Dplcement Dened Aerge g Dened Aerge Accelerton g Dened Knemtc Quntte Scler: Mgntude Tme Intnt, Tme Interl nd Speed
Knemtc Quntte Lner Phyc 11 Eyre Tme Intnt t Fundmentl Tme Interl t Dened Poton Fundmentl Dplcement Dened Aerge g Dened Aerge Accelerton g Dened Knemtc Quntte Scler: Mgntude Tme Intnt, Tme Interl nd Speed
The DMRG and Matrix Product States. Adrian Feiguin
 The DRG nd trix Product Stte Adrin Feiguin Why doe the DRG work??? ω In other word: wht mke the denity mtrix eigenvue ehve o nicey? good! d! Entngement We y tht two quntum ytem A nd re entnged when we
The DRG nd trix Product Stte Adrin Feiguin Why doe the DRG work??? ω In other word: wht mke the denity mtrix eigenvue ehve o nicey? good! d! Entngement We y tht two quntum ytem A nd re entnged when we
Haddow s Experiment:
 schemtc drwng of Hddow's expermentl set-up movng pston non-contctng moton sensor bems of sprng steel poston vres to djust frequences blocks of sold steel shker Hddow s Experment: terr frm Theoretcl nd
schemtc drwng of Hddow's expermentl set-up movng pston non-contctng moton sensor bems of sprng steel poston vres to djust frequences blocks of sold steel shker Hddow s Experment: terr frm Theoretcl nd
Graphical rules for SU(N)
") M/FP/Prours of Physque Théorque Invrnes n physs nd group theory Grph rues for SU(N) In ths proem, we de wth grph nguge, whh turns out to e very usefu when omputng group ftors n Yng-Ms fed theory onstruted
M/FP/Prours of Physque Théorque Invrnes n physs nd group theory Grph rues for SU(N) In ths proem, we de wth grph nguge, whh turns out to e very usefu when omputng group ftors n Yng-Ms fed theory onstruted
8. INVERSE Z-TRANSFORM
 8. INVERSE Z-TRANSFORM The proce by whch Z-trnform of tme ere, nmely X(), returned to the tme domn clled the nvere Z-trnform. The nvere Z-trnform defned by: Computer tudy Z X M-fle trn.m ued to fnd nvere
8. INVERSE Z-TRANSFORM The proce by whch Z-trnform of tme ere, nmely X(), returned to the tme domn clled the nvere Z-trnform. The nvere Z-trnform defned by: Computer tudy Z X M-fle trn.m ued to fnd nvere
4. Eccentric axial loading, cross-section core
 . Eccentrc xl lodng, cross-secton core Introducton We re strtng to consder more generl cse when the xl force nd bxl bendng ct smultneousl n the cross-secton of the br. B vrtue of Snt-Vennt s prncple we
. Eccentrc xl lodng, cross-secton core Introducton We re strtng to consder more generl cse when the xl force nd bxl bendng ct smultneousl n the cross-secton of the br. B vrtue of Snt-Vennt s prncple we
E-Companion: Mathematical Proofs
 E-omnon: Mthemtcl Poo Poo o emm : Pt DS Sytem y denton o t ey to vey tht t ncee n wth d ncee n We dene } ] : [ { M whee / We let the ttegy et o ech etle n DS e ]} [ ] [ : { M w whee M lge otve nume oth
E-omnon: Mthemtcl Poo Poo o emm : Pt DS Sytem y denton o t ey to vey tht t ncee n wth d ncee n We dene } ] : [ { M whee / We let the ttegy et o ech etle n DS e ]} [ ] [ : { M w whee M lge otve nume oth
Neural Network Introduction. Hung-yi Lee
 Neu Neto Intoducton Hung- ee Reve: Supevsed enng Mode Hpothess Functon Set f, f : : (e) Tnng: Pc the est Functon f * Best Functon f * Testng: f Tnng Dt : functon nput : functon output, ˆ,, ˆ, Neu Neto
Neu Neto Intoducton Hung- ee Reve: Supevsed enng Mode Hpothess Functon Set f, f : : (e) Tnng: Pc the est Functon f * Best Functon f * Testng: f Tnng Dt : functon nput : functon output, ˆ,, ˆ, Neu Neto
FUNDAMENTALS ON ALGEBRA MATRICES AND DETERMINANTS
 Dol Bgyoko (0 FUNDAMENTALS ON ALGEBRA MATRICES AND DETERMINANTS Introducton Expressons of the form P(x o + x + x + + n x n re clled polynomls The coeffcents o,, n re ndependent of x nd the exponents 0,,,
Dol Bgyoko (0 FUNDAMENTALS ON ALGEBRA MATRICES AND DETERMINANTS Introducton Expressons of the form P(x o + x + x + + n x n re clled polynomls The coeffcents o,, n re ndependent of x nd the exponents 0,,,
EE Control Systems LECTURE 8
 Coyright F.L. Lewi 999 All right reerved Udted: Sundy, Ferury, 999 EE 44 - Control Sytem LECTURE 8 REALIZATION AND CANONICAL FORMS A liner time-invrint (LTI) ytem cn e rereented in mny wy, including: differentil
Coyright F.L. Lewi 999 All right reerved Udted: Sundy, Ferury, 999 EE 44 - Control Sytem LECTURE 8 REALIZATION AND CANONICAL FORMS A liner time-invrint (LTI) ytem cn e rereented in mny wy, including: differentil
MEG 741 Energy and Variational Methods in Mechanics I
 ME 7 Energy n rition Methos in Mechnics I Brenn J. O ooe, Ph.D. Associte Professor of Mechnic Engineering Hor R. Hghes Coege of Engineering Uniersity of e Ls egs BE B- (7) 895-885 j@me.n.e Chter : Strctr
ME 7 Energy n rition Methos in Mechnics I Brenn J. O ooe, Ph.D. Associte Professor of Mechnic Engineering Hor R. Hghes Coege of Engineering Uniersity of e Ls egs BE B- (7) 895-885 j@me.n.e Chter : Strctr
? plate in A G in
 Proble (0 ponts): The plstc block shon s bonded to rgd support nd to vertcl plte to hch 0 kp lod P s ppled. Knong tht for the plstc used G = 50 ks, deterne the deflecton of the plte. Gven: G 50 ks, P 0
Proble (0 ponts): The plstc block shon s bonded to rgd support nd to vertcl plte to hch 0 kp lod P s ppled. Knong tht for the plstc used G = 50 ks, deterne the deflecton of the plte. Gven: G 50 ks, P 0
v v at 1 2 d vit at v v 2a d
 SPH3UW Unt. Accelerton n One Denon Pge o 9 Note Phyc Inventory Accelerton the rte o chnge o velocty. Averge ccelerton, ve the chnge n velocty dvded by the te ntervl, v v v ve. t t v dv Intntneou ccelerton
SPH3UW Unt. Accelerton n One Denon Pge o 9 Note Phyc Inventory Accelerton the rte o chnge o velocty. Averge ccelerton, ve the chnge n velocty dvded by the te ntervl, v v v ve. t t v dv Intntneou ccelerton
Position and Speed Control. Industrial Electrical Engineering and Automation Lund University, Sweden
 Poton nd Speed Control Lund Unverty, Seden Generc Structure R poer Reference Sh tte Voltge Current Control ytem M Speed Poton Ccde Control * θ Poton * Speed * control control - - he ytem contn to ntegrton.
Poton nd Speed Control Lund Unverty, Seden Generc Structure R poer Reference Sh tte Voltge Current Control ytem M Speed Poton Ccde Control * θ Poton * Speed * control control - - he ytem contn to ntegrton.
Rank One Update And the Google Matrix by Al Bernstein Signal Science, LLC
 Introducton Rnk One Updte And the Google Mtrx y Al Bernsten Sgnl Scence, LLC www.sgnlscence.net here re two dfferent wys to perform mtrx multplctons. he frst uses dot product formulton nd the second uses
Introducton Rnk One Updte And the Google Mtrx y Al Bernsten Sgnl Scence, LLC www.sgnlscence.net here re two dfferent wys to perform mtrx multplctons. he frst uses dot product formulton nd the second uses
Let us look at a linear equation for a one-port network, for example some load with a reflection coefficient s, Figure L6.
 ECEN 5004, prng 08 Actve Mcrowve Crcut Zoy Popovc, Unverty of Colordo, Boulder LECURE 5 IGNAL FLOW GRAPH FOR MICROWAVE CIRCUI ANALYI In mny text on mcrowve mplfer (e.g. the clc one by Gonzlez), gnl flow-grph
ECEN 5004, prng 08 Actve Mcrowve Crcut Zoy Popovc, Unverty of Colordo, Boulder LECURE 5 IGNAL FLOW GRAPH FOR MICROWAVE CIRCUI ANALYI In mny text on mcrowve mplfer (e.g. the clc one by Gonzlez), gnl flow-grph
Torsion, Thermal Effects and Indeterminacy
 ENDS Note Set 7 F007bn orson, herml Effects nd Indetermncy Deformton n orsonlly Loded Members Ax-symmetrc cross sectons subjected to xl moment or torque wll remn plne nd undstorted. At secton, nternl torque
ENDS Note Set 7 F007bn orson, herml Effects nd Indetermncy Deformton n orsonlly Loded Members Ax-symmetrc cross sectons subjected to xl moment or torque wll remn plne nd undstorted. At secton, nternl torque
SVMs for regression Multilayer neural networks
 Lecture SVMs for regresson Muter neur netors Mos Husrecht mos@cs.ptt.edu 539 Sennott Squre Support vector mchne SVM SVM mmze the mrgn round the seprtng hperpne. he decson functon s fu specfed suset of
Lecture SVMs for regresson Muter neur netors Mos Husrecht mos@cs.ptt.edu 539 Sennott Squre Support vector mchne SVM SVM mmze the mrgn round the seprtng hperpne. he decson functon s fu specfed suset of
Name: SID: Discussion Session:
 Nme: SID: Dscusson Sesson: hemcl Engneerng hermodynmcs -- Fll 008 uesdy, Octoer, 008 Merm I - 70 mnutes 00 onts otl losed Book nd Notes (5 ponts). onsder n del gs wth constnt het cpctes. Indcte whether
Nme: SID: Dscusson Sesson: hemcl Engneerng hermodynmcs -- Fll 008 uesdy, Octoer, 008 Merm I - 70 mnutes 00 onts otl losed Book nd Notes (5 ponts). onsder n del gs wth constnt het cpctes. Indcte whether
Theory of Rotation. Chapter 8+9 of the textbook Elementary Physics 2. This is an article from my home page:
 Theory of Rotton Chpter 8+9 of the textbook Eeentry Physcs Ths s n rtce fro y hoe pge: www.oewtthnsen.dk Oe Wtt-Hnsen 977 (6) Acknowedgent Ths pper s dgtzed trnston fro Dnsh of chpter n textbook on physcs
Theory of Rotton Chpter 8+9 of the textbook Eeentry Physcs Ths s n rtce fro y hoe pge: www.oewtthnsen.dk Oe Wtt-Hnsen 977 (6) Acknowedgent Ths pper s dgtzed trnston fro Dnsh of chpter n textbook on physcs
2. Work each problem on the exam booklet in the space provided.
 ECE470 EXAM # SOLUTIONS SPRING 08 Intructon:. Cloed-book, cloed-note, open-mnd exm.. Work ech problem on the exm booklet n the pce provded.. Wrte netly nd clerly for prtl credt. Cro out ny mterl you do
ECE470 EXAM # SOLUTIONS SPRING 08 Intructon:. Cloed-book, cloed-note, open-mnd exm.. Work ech problem on the exm booklet n the pce provded.. Wrte netly nd clerly for prtl credt. Cro out ny mterl you do
2.12 Pull Back, Push Forward and Lie Time Derivatives
 Secton 2.2 2.2 Pull Bck Push Forwrd nd e me Dertes hs secton s n the mn concerned wth the follown ssue: n oserer ttched to fxed sy Crtesn coordnte system wll see mterl moe nd deform oer tme nd wll osere
Secton 2.2 2.2 Pull Bck Push Forwrd nd e me Dertes hs secton s n the mn concerned wth the follown ssue: n oserer ttched to fxed sy Crtesn coordnte system wll see mterl moe nd deform oer tme nd wll osere
UNIVERSITY OF IOANNINA DEPARTMENT OF ECONOMICS. M.Sc. in Economics MICROECONOMIC THEORY I. Problem Set II
 Mcroeconomc Theory I UNIVERSITY OF IOANNINA DEPARTMENT OF ECONOMICS MSc n Economcs MICROECONOMIC THEORY I Techng: A Lptns (Note: The number of ndctes exercse s dffculty level) ()True or flse? If V( y )
Mcroeconomc Theory I UNIVERSITY OF IOANNINA DEPARTMENT OF ECONOMICS MSc n Economcs MICROECONOMIC THEORY I Techng: A Lptns (Note: The number of ndctes exercse s dffculty level) ()True or flse? If V( y )
Chapter 6 Plane Motion of Rigid Bodies
 Chpe 6 Pne oon of Rd ode 6. Equon of oon fo Rd bod. 6., 6., 6.3 Conde d bod ced upon b ee een foce,, 3,. We cn ume h he bod mde of e numbe n of pce of m Δm (,,, n). Conden f he moon of he m cene of he
Chpe 6 Pne oon of Rd ode 6. Equon of oon fo Rd bod. 6., 6., 6.3 Conde d bod ced upon b ee een foce,, 3,. We cn ume h he bod mde of e numbe n of pce of m Δm (,,, n). Conden f he moon of he m cene of he
The Schur-Cohn Algorithm
 Modelng, Estmton nd Otml Flterng n Sgnl Processng Mohmed Njm Coyrght 8, ISTE Ltd. Aendx F The Schur-Cohn Algorthm In ths endx, our m s to resent the Schur-Cohn lgorthm [] whch s often used s crteron for
Modelng, Estmton nd Otml Flterng n Sgnl Processng Mohmed Njm Coyrght 8, ISTE Ltd. Aendx F The Schur-Cohn Algorthm In ths endx, our m s to resent the Schur-Cohn lgorthm [] whch s often used s crteron for
VECTORS AND TENSORS IV.1.1. INTRODUCTION
 Chpter IV Vector nd Tensor Anlyss IV. Vectors nd Tensors Septemer 5, 08 05 IV. VECTORS AND TENSORS IV... INTRODUCTION In mthemtcs nd mechncs, we he to operte wth qunttes whch requre dfferent mthemtcl ojects
Chpter IV Vector nd Tensor Anlyss IV. Vectors nd Tensors Septemer 5, 08 05 IV. VECTORS AND TENSORS IV... INTRODUCTION In mthemtcs nd mechncs, we he to operte wth qunttes whch requre dfferent mthemtcl ojects
Lecture 36. Finite Element Methods
 CE 60: Numercl Methods Lecture 36 Fnte Element Methods Course Coordntor: Dr. Suresh A. Krth, Assocte Professor, Deprtment of Cvl Engneerng, IIT Guwht. In the lst clss, we dscussed on the ppromte methods
CE 60: Numercl Methods Lecture 36 Fnte Element Methods Course Coordntor: Dr. Suresh A. Krth, Assocte Professor, Deprtment of Cvl Engneerng, IIT Guwht. In the lst clss, we dscussed on the ppromte methods
Angular Momentum in Spherical Symmetry
 Angu Moentu n Sphec Set Angu Moentu n Sphec Set 6 Quntu Mechncs Pof. Y. F. Chen Angu Moentu n Sphec Set The concept of ngu oentu ps cuc oe n the theedenson 3D Schödnge we equton. The ethod of septon w
Angu Moentu n Sphec Set Angu Moentu n Sphec Set 6 Quntu Mechncs Pof. Y. F. Chen Angu Moentu n Sphec Set The concept of ngu oentu ps cuc oe n the theedenson 3D Schödnge we equton. The ethod of septon w
Multiple view geometry
 EECS 442 Computer vson Multple vew geometry Perspectve Structure from Moton - Perspectve structure from moton prolem - mgutes - lgerc methods - Fctorzton methods - Bundle djustment - Self-clrton Redng:
EECS 442 Computer vson Multple vew geometry Perspectve Structure from Moton - Perspectve structure from moton prolem - mgutes - lgerc methods - Fctorzton methods - Bundle djustment - Self-clrton Redng:
Electrical Circuits II (ECE233b)
") Electrcal Crcut II (ECE33b) Applcaton of Laplace Tranform to Crcut Analy Anet Dounav The Unverty of Wetern Ontaro Faculty of Engneerng Scence Crcut Element Retance Tme Doman (t) v(t) R v(t) = R(t) Frequency
Electrcal Crcut II (ECE33b) Applcaton of Laplace Tranform to Crcut Analy Anet Dounav The Unverty of Wetern Ontaro Faculty of Engneerng Scence Crcut Element Retance Tme Doman (t) v(t) R v(t) = R(t) Frequency
COMPLEX NUMBERS INDEX
 COMPLEX NUMBERS INDEX. The hstory of the complex numers;. The mgnry unt I ;. The Algerc form;. The Guss plne; 5. The trgonometrc form;. The exponentl form; 7. The pplctons of the complex numers. School
COMPLEX NUMBERS INDEX. The hstory of the complex numers;. The mgnry unt I ;. The Algerc form;. The Guss plne; 5. The trgonometrc form;. The exponentl form; 7. The pplctons of the complex numers. School
Chemical Reaction Engineering
 Lecture 20 hemcl Recton Engneerng (RE) s the feld tht studes the rtes nd mechnsms of chemcl rectons nd the desgn of the rectors n whch they tke plce. Lst Lecture Energy Blnce Fundmentls F 0 E 0 F E Q W
Lecture 20 hemcl Recton Engneerng (RE) s the feld tht studes the rtes nd mechnsms of chemcl rectons nd the desgn of the rectors n whch they tke plce. Lst Lecture Energy Blnce Fundmentls F 0 E 0 F E Q W
Lecture 8: Camera Calibration
 Lecture 8: Cer Clbrton rofessor Fe-Fe L Stnford Vson Lb Fe-Fe L 9-Oct- Wht we wll lern tody? Revew cer preters Affne cer odel (roble Set (Q4)) Cer clbrton Vnshng ponts nd lnes (roble Set (Q)) Redng: [F]
Lecture 8: Cer Clbrton rofessor Fe-Fe L Stnford Vson Lb Fe-Fe L 9-Oct- Wht we wll lern tody? Revew cer preters Affne cer odel (roble Set (Q4)) Cer clbrton Vnshng ponts nd lnes (roble Set (Q)) Redng: [F]
Chemical Reaction Engineering
 Lecture 20 hemcl Recton Engneerng (RE) s the feld tht studes the rtes nd mechnsms of chemcl rectons nd the desgn of the rectors n whch they tke plce. Lst Lecture Energy Blnce Fundmentls F E F E + Q! 0
Lecture 20 hemcl Recton Engneerng (RE) s the feld tht studes the rtes nd mechnsms of chemcl rectons nd the desgn of the rectors n whch they tke plce. Lst Lecture Energy Blnce Fundmentls F E F E + Q! 0
Lecture 4: Piecewise Cubic Interpolation
 Lecture notes on Vrtonl nd Approxmte Methods n Appled Mthemtcs - A Perce UBC Lecture 4: Pecewse Cubc Interpolton Compled 6 August 7 In ths lecture we consder pecewse cubc nterpolton n whch cubc polynoml
Lecture notes on Vrtonl nd Approxmte Methods n Appled Mthemtcs - A Perce UBC Lecture 4: Pecewse Cubc Interpolton Compled 6 August 7 In ths lecture we consder pecewse cubc nterpolton n whch cubc polynoml
Synchronous Generator Modeling Using SimuLink
 ynhronou Genertor Moelng Ung mun Outlne ner Moel Ung Eulent Crut ner Moel Ung Emee Mt Nonlner Moel Eulent Crut on Ax From we get m m l m t t m l r ) ( t t m l ) ( t t m l ) ( Eulent Crut on Ax From we
ynhronou Genertor Moelng Ung mun Outlne ner Moel Ung Eulent Crut ner Moel Ung Emee Mt Nonlner Moel Eulent Crut on Ax From we get m m l m t t m l r ) ( t t m l ) ( t t m l ) ( Eulent Crut on Ax From we
A Result on a Cyclic Polynomials
 Gen. Math. Note, Vol. 6, No., Feruary 05, pp. 59-65 ISSN 9-78 Copyrght ICSRS Pulcaton, 05.-cr.org Avalale free onlne at http:.geman.n A Reult on a Cyclc Polynomal S.A. Wahd Department of Mathematc & Stattc
Gen. Math. Note, Vol. 6, No., Feruary 05, pp. 59-65 ISSN 9-78 Copyrght ICSRS Pulcaton, 05.-cr.org Avalale free onlne at http:.geman.n A Reult on a Cyclc Polynomal S.A. Wahd Department of Mathematc & Stattc
Design of Recursive Digital Filters IIR
 Degn of Recurve Dgtal Flter IIR The outut from a recurve dgtal flter deend on one or more revou outut value, a well a on nut t nvolve feedbac. A recurve flter ha an nfnte mule reone (IIR). The mulve reone
Degn of Recurve Dgtal Flter IIR The outut from a recurve dgtal flter deend on one or more revou outut value, a well a on nut t nvolve feedbac. A recurve flter ha an nfnte mule reone (IIR). The mulve reone
KINETIC AND STATIC ANALYSIS AT UNLOADED RUNNING ON MECHANISMS OF PARALLEL GANG SHEARS TYPE ASSIGNED FOR CUTTING THE METALLURGICAL PRODUCTS
 nns of the Unversty of Petroşn echnc ngneerng 9 (7) 5-7 5 KINTI N STTI NLYSIS T UNLO UNNIN ON HNISS O PLLL N SHS TYP SSIN O UTTIN TH TLLUIL POUTS IN UIUL HIN 1 ; VSIL ZI ; TOO VSIU bstrct: In ths study
nns of the Unversty of Petroşn echnc ngneerng 9 (7) 5-7 5 KINTI N STTI NLYSIS T UNLO UNNIN ON HNISS O PLLL N SHS TYP SSIN O UTTIN TH TLLUIL POUTS IN UIUL HIN 1 ; VSIL ZI ; TOO VSIU bstrct: In ths study
Support vector machines for regression
 S 75 Mchne ernng ecture 5 Support vector mchnes for regresson Mos Huskrecht mos@cs.ptt.edu 539 Sennott Squre S 75 Mchne ernng he decson oundr: ˆ he decson: Support vector mchnes ˆ α SV ˆ sgn αˆ SV!!: Decson
S 75 Mchne ernng ecture 5 Support vector mchnes for regresson Mos Huskrecht mos@cs.ptt.edu 539 Sennott Squre S 75 Mchne ernng he decson oundr: ˆ he decson: Support vector mchnes ˆ α SV ˆ sgn αˆ SV!!: Decson
S-Domain Analysis. s-domain Circuit Analysis. EE695K VLSI Interconnect. Time domain (t domain) Complex frequency domain (s domain) Laplace Transform L
 Complex frequency domain (s domain) Laplace Transform L") EE695K S nterconnect S-Doman naly -Doman rcut naly Tme doman t doman near rcut aplace Tranform omplex frequency doman doman Tranformed rcut Dfferental equaton lacal technque epone waveform aplace Tranform
EE695K S nterconnect S-Doman naly -Doman rcut naly Tme doman t doman near rcut aplace Tranform omplex frequency doman doman Tranformed rcut Dfferental equaton lacal technque epone waveform aplace Tranform
Lecture 4 Single View Metrology. Lecture 4 Single View Metrology = $! $ $ " World ref. system. Calibration Problem
 Lecture 4 Singe View Metroog Professor Siio Srese Comuttion Vision nd Geometr L Siio Srese Lecture 4-6-Jn-5 Lecture 4 Singe View Metroog Reiew cirtion nd D trnsformtions Vnishing oints nd ines Estimting
Lecture 4 Singe View Metroog Professor Siio Srese Comuttion Vision nd Geometr L Siio Srese Lecture 4-6-Jn-5 Lecture 4 Singe View Metroog Reiew cirtion nd D trnsformtions Vnishing oints nd ines Estimting
College of Engineering Department of Electronics and Communication Engineering. Test 1 With Model Answer
 Name: Student D Number: Secton Number: 01/0/03/04 A/B Lecturer: Dr Jamaludn/ Dr Jehana Ermy/ Dr Azn Wat Table Number: College of Engneerng Department of Electroncs and Communcaton Engneerng Test 1 Wth
Name: Student D Number: Secton Number: 01/0/03/04 A/B Lecturer: Dr Jamaludn/ Dr Jehana Ermy/ Dr Azn Wat Table Number: College of Engneerng Department of Electroncs and Communcaton Engneerng Test 1 Wth
A NEW APPROACH IN THE RAYLEIGH - SCHRÖDINGER PERTURBATION THEORY FOR THE ROVIBRATIONAL PROBLEM
 Lebanee Scence Journal, Vol., No., A NEW APPROACH IN THE RAYLEIGH - SCHRÖDINGER PERTURBATION THEORY FOR THE ROVIBRATIONAL PROBLEM M. Korek Faculty of Scence, Berut Arab Unerty, P.O.Box - Rad El Solh, Berut
Lebanee Scence Journal, Vol., No., A NEW APPROACH IN THE RAYLEIGH - SCHRÖDINGER PERTURBATION THEORY FOR THE ROVIBRATIONAL PROBLEM M. Korek Faculty of Scence, Berut Arab Unerty, P.O.Box - Rad El Solh, Berut
Study of Trapezoidal Fuzzy Linear System of Equations S. M. Bargir 1, *, M. S. Bapat 2, J. D. Yadav 3 1
 mercn Interntonl Journl of Reserch n cence Technology Engneerng & Mthemtcs vlble onlne t http://wwwsrnet IN (Prnt: 38-349 IN (Onlne: 38-3580 IN (CD-ROM: 38-369 IJRTEM s refereed ndexed peer-revewed multdscplnry
mercn Interntonl Journl of Reserch n cence Technology Engneerng & Mthemtcs vlble onlne t http://wwwsrnet IN (Prnt: 38-349 IN (Onlne: 38-3580 IN (CD-ROM: 38-369 IJRTEM s refereed ndexed peer-revewed multdscplnry
Energy Storage Elements: Capacitors and Inductors
 CHAPTER 6 Energy Storage Elements: Capactors and Inductors To ths pont n our study of electronc crcuts, tme has not been mportant. The analyss and desgns we hae performed so far hae been statc, and all
CHAPTER 6 Energy Storage Elements: Capactors and Inductors To ths pont n our study of electronc crcuts, tme has not been mportant. The analyss and desgns we hae performed so far hae been statc, and all
AT100 - Introductory Algebra. Section 2.7: Inequalities. x a. x a. x < a
 Section 2.7: Inequlities In this section, we will Determine if given vlue is solution to n inequlity Solve given inequlity or compound inequlity; give the solution in intervl nottion nd the solution 2.7
Section 2.7: Inequlities In this section, we will Determine if given vlue is solution to n inequlity Solve given inequlity or compound inequlity; give the solution in intervl nottion nd the solution 2.7
Jens Siebel (University of Applied Sciences Kaiserslautern) An Interactive Introduction to Complex Numbers
 An Interactive Introduction to Complex Numbers") Jens Sebel (Unversty of Appled Scences Kserslutern) An Interctve Introducton to Complex Numbers 1. Introducton We know tht some polynoml equtons do not hve ny solutons on R/. Exmple 1.1: Solve x + 1= for
Jens Sebel (Unversty of Appled Scences Kserslutern) An Interctve Introducton to Complex Numbers 1. Introducton We know tht some polynoml equtons do not hve ny solutons on R/. Exmple 1.1: Solve x + 1= for
Chapter Eight. Review and Summary. Two methods in solid mechanics ---- vectorial methods and energy methods or variational methods
 Chapter Eght Energy Method 8. Introducton 8. Stran energy expressons 8.3 Prncpal of statonary potental energy; several degrees of freedom ------ Castglano s frst theorem ---- Examples 8.4 Prncpal of statonary
Chapter Eght Energy Method 8. Introducton 8. Stran energy expressons 8.3 Prncpal of statonary potental energy; several degrees of freedom ------ Castglano s frst theorem ---- Examples 8.4 Prncpal of statonary
Introduction to statically indeterminate structures
 Sttics of Buiding Structures I., EASUS Introduction to stticy indeterminte structures Deprtment of Structur echnics Fcuty of Civi Engineering, VŠB-Technic University of Ostrv Outine of Lecture Stticy indeterminte
Sttics of Buiding Structures I., EASUS Introduction to stticy indeterminte structures Deprtment of Structur echnics Fcuty of Civi Engineering, VŠB-Technic University of Ostrv Outine of Lecture Stticy indeterminte
The meaning of d Alembert s principle for rigid systems and link mechanisms
 De Bedeutung de d Alembertchen Prnzpe für trre Syteme und Gelenkmechnmen (Fortetzung) Arch der Mth und Phy () (90) 98-6 The menng of d Alembert prncple for rgd ytem nd lnk mechnm By KARL HEUN n Berln Trnlted
De Bedeutung de d Alembertchen Prnzpe für trre Syteme und Gelenkmechnmen (Fortetzung) Arch der Mth und Phy () (90) 98-6 The menng of d Alembert prncple for rgd ytem nd lnk mechnm By KARL HEUN n Berln Trnlted
Chapter Unary Matrix Operations
 Chpter 04.04 Ury trx Opertos After redg ths chpter, you should be ble to:. kow wht ury opertos mes,. fd the trspose of squre mtrx d t s reltoshp to symmetrc mtrces,. fd the trce of mtrx, d 4. fd the ermt
Chpter 04.04 Ury trx Opertos After redg ths chpter, you should be ble to:. kow wht ury opertos mes,. fd the trspose of squre mtrx d t s reltoshp to symmetrc mtrces,. fd the trce of mtrx, d 4. fd the ermt
Accelerator Physics. G. A. Krafft Jefferson Lab Old Dominion University Lecture 5
 Accelertor Phyic G. A. Krfft Jefferon L Old Dominion Univerity Lecture 5 ODU Accelertor Phyic Spring 15 Inhomogeneou Hill Eqution Fundmentl trnvere eqution of motion in prticle ccelertor for mll devition
Accelertor Phyic G. A. Krfft Jefferon L Old Dominion Univerity Lecture 5 ODU Accelertor Phyic Spring 15 Inhomogeneou Hill Eqution Fundmentl trnvere eqution of motion in prticle ccelertor for mll devition
ESCI 342 Atmospheric Dynamics I Lesson 1 Vectors and Vector Calculus
 ESI 34 tmospherc Dnmcs I Lesson 1 Vectors nd Vector lculus Reference: Schum s Outlne Seres: Mthemtcl Hndbook of Formuls nd Tbles Suggested Redng: Mrtn Secton 1 OORDINTE SYSTEMS n orthonorml coordnte sstem
ESI 34 tmospherc Dnmcs I Lesson 1 Vectors nd Vector lculus Reference: Schum s Outlne Seres: Mthemtcl Hndbook of Formuls nd Tbles Suggested Redng: Mrtn Secton 1 OORDINTE SYSTEMS n orthonorml coordnte sstem
Effects of polarization on the reflected wave
 Lecture Notes. L Ros PPLIED OPTICS Effects of polrzton on the reflected wve Ref: The Feynmn Lectures on Physcs, Vol-I, Secton 33-6 Plne of ncdence Z Plne of nterfce Fg. 1 Y Y r 1 Glss r 1 Glss Fg. Reflecton
Lecture Notes. L Ros PPLIED OPTICS Effects of polrzton on the reflected wve Ref: The Feynmn Lectures on Physcs, Vol-I, Secton 33-6 Plne of ncdence Z Plne of nterfce Fg. 1 Y Y r 1 Glss r 1 Glss Fg. Reflecton
Analysis of Variance and Design of Experiments-II
 Anly of Vrne Degn of Experment-II MODULE VI LECTURE - 8 SPLIT-PLOT AND STRIP-PLOT DESIGNS Dr Shlbh Deprtment of Mthemt & Sttt Indn Inttute of Tehnology Knpur Tretment ontrt: Mn effet The uefulne of hvng
Anly of Vrne Degn of Experment-II MODULE VI LECTURE - 8 SPLIT-PLOT AND STRIP-PLOT DESIGNS Dr Shlbh Deprtment of Mthemt & Sttt Indn Inttute of Tehnology Knpur Tretment ontrt: Mn effet The uefulne of hvng
p (i.e., the set of all nonnegative real numbers). Similarly, Z will denote the set of all
. Similarly, Z will denote the set of all") th Prelmnry E 689 Lecture Notes by B. Yo 0. Prelmnry Notton themtcl Prelmnres It s ssumed tht the reder s fmlr wth the noton of set nd ts elementry oertons, nd wth some bsc logc oertors, e.g. x A : x s
th Prelmnry E 689 Lecture Notes by B. Yo 0. Prelmnry Notton themtcl Prelmnres It s ssumed tht the reder s fmlr wth the noton of set nd ts elementry oertons, nd wth some bsc logc oertors, e.g. x A : x s
CENTROID (AĞIRLIK MERKEZİ )
") CENTOD (ĞLK MEKEZİ ) centrod s geometrcl concept rsng from prllel forces. Tus, onl prllel forces possess centrod. Centrod s tougt of s te pont were te wole wegt of pscl od or sstem of prtcles s lumped.
CENTOD (ĞLK MEKEZİ ) centrod s geometrcl concept rsng from prllel forces. Tus, onl prllel forces possess centrod. Centrod s tougt of s te pont were te wole wegt of pscl od or sstem of prtcles s lumped.
UNIT 7. THE FUNDAMENTAL EQUATIONS OF HYPERSURFACE THEORY
 UNIT 7. THE FUNDAMENTAL EQUATIONS OF HYPERSURFACE THEORY ================================================================================================================================================================================================================================================
UNIT 7. THE FUNDAMENTAL EQUATIONS OF HYPERSURFACE THEORY ================================================================================================================================================================================================================================================
Electrochemical Thermodynamics. Interfaces and Energy Conversion
 CHE465/865, 2006-3, Lecture 6, 18 th Sep., 2006 Electrochemcl Thermodynmcs Interfces nd Energy Converson Where does the energy contrbuton F zϕ dn come from? Frst lw of thermodynmcs (conservton of energy):
CHE465/865, 2006-3, Lecture 6, 18 th Sep., 2006 Electrochemcl Thermodynmcs Interfces nd Energy Converson Where does the energy contrbuton F zϕ dn come from? Frst lw of thermodynmcs (conservton of energy):
CE 160 Lab 2 Notes: Shear and Moment Diagrams for Beams
 E 160 Lb 2 Notes: Sher nd oment Digrms for ems Sher nd moment digrms re plots of how the internl bending moment nd sher vry long the length of the bem. Sign onvention for nd onsider the rbitrrily loded
E 160 Lb 2 Notes: Sher nd oment Digrms for ems Sher nd moment digrms re plots of how the internl bending moment nd sher vry long the length of the bem. Sign onvention for nd onsider the rbitrrily loded
Quick Visit to Bernoulli Land
 Although we have een the Bernoull equaton and een t derved before, th next note how t dervaton for an uncopreble & nvcd flow. The dervaton follow that of Kuethe &Chow ot cloely (I lke t better than Anderon).
Although we have een the Bernoull equaton and een t derved before, th next note how t dervaton for an uncopreble & nvcd flow. The dervaton follow that of Kuethe &Chow ot cloely (I lke t better than Anderon).
and decompose in cycles of length two
 Permutaton of Proceedng of the Natona Conference On Undergraduate Reearch (NCUR) 006 Domncan Unverty of Caforna San Rafae, Caforna Apr - 4, 007 that are gven by bnoma and decompoe n cyce of ength two Yeena
Permutaton of Proceedng of the Natona Conference On Undergraduate Reearch (NCUR) 006 Domncan Unverty of Caforna San Rafae, Caforna Apr - 4, 007 that are gven by bnoma and decompoe n cyce of ength two Yeena
Call Auction Markets with Risk-Averse Specialists
 Theoretc Economc Letter 0 75-79 http://oorg/0436/te0030 Puhe Onne My 0 (http://wwwscrporg/journ/te) C Aucton Mret wth R-Aere Spect Poo Vte Deprtment of Economc Unerty of Pecr Ve Pnro Ity Em: pte@uncht
Theoretc Economc Letter 0 75-79 http://oorg/0436/te0030 Puhe Onne My 0 (http://wwwscrporg/journ/te) C Aucton Mret wth R-Aere Spect Poo Vte Deprtment of Economc Unerty of Pecr Ve Pnro Ity Em: pte@uncht
Lecture 9-3/8/10-14 Spatial Description and Transformation
 Letue 9-8- tl Deton nd nfomton Homewo No. Due 9. Fme ngement onl. Do not lulte...8..7.8 Otonl et edt hot oof tht = - Homewo No. egned due 9 tud eton.-.. olve oblem:.....7.8. ee lde 6 7. e Mtlb on. f oble.
Letue 9-8- tl Deton nd nfomton Homewo No. Due 9. Fme ngement onl. Do not lulte...8..7.8 Otonl et edt hot oof tht = - Homewo No. egned due 9 tud eton.-.. olve oblem:.....7.8. ee lde 6 7. e Mtlb on. f oble.
Introduction To Robotics (Kinematics, Dynamics, and Design)
") ntroducton To obotcs Kneatcs, Dynacs, and Desgn SESSON # 6: l Meghdar, Professor School of Mechancal Engneerng Sharf Unersty of Technology Tehran, N 365-9567 Hoepage: http://eghdar.sharf.edu So far we
ntroducton To obotcs Kneatcs, Dynacs, and Desgn SESSON # 6: l Meghdar, Professor School of Mechancal Engneerng Sharf Unersty of Technology Tehran, N 365-9567 Hoepage: http://eghdar.sharf.edu So far we
Chapter 5 Bending Moments and Shear Force Diagrams for Beams
 Chpter 5 ending Moments nd Sher Force Digrms for ems n ddition to illy loded brs/rods (e.g. truss) nd torsionl shfts, the structurl members my eperience some lods perpendiculr to the is of the bem nd will
Chpter 5 ending Moments nd Sher Force Digrms for ems n ddition to illy loded brs/rods (e.g. truss) nd torsionl shfts, the structurl members my eperience some lods perpendiculr to the is of the bem nd will
ECE470 EXAM #3 SOLUTIONS SPRING Work each problem on the exam booklet in the space provided.
 C470 XAM # SOLUTIOS SPRIG 07 Intructon:. Cloed-book, cloed-note, open-mnd exm.. Work ech problem on the exm booklet n the pce provded.. Wrte netly nd clerly or prtl credt. Cro out ny mterl you do not wnt
C470 XAM # SOLUTIOS SPRIG 07 Intructon:. Cloed-book, cloed-note, open-mnd exm.. Work ech problem on the exm booklet n the pce provded.. Wrte netly nd clerly or prtl credt. Cro out ny mterl you do not wnt
Lecture 3 Camera Models 2 & Camera Calibration. Professor Silvio Savarese Computational Vision and Geometry Lab
 Lecture Cer Models Cer Clbrton rofessor Slvo Svrese Coputtonl Vson nd Geoetry Lb Slvo Svrese Lecture - Jn 7 th, 8 Lecture Cer Models Cer Clbrton Recp of cer odels Cer clbrton proble Cer clbrton wth rdl
Lecture Cer Models Cer Clbrton rofessor Slvo Svrese Coputtonl Vson nd Geoetry Lb Slvo Svrese Lecture - Jn 7 th, 8 Lecture Cer Models Cer Clbrton Recp of cer odels Cer clbrton proble Cer clbrton wth rdl
Copyright 2004 by Oxford University Press, Inc.
 JT as an Amplfer &a Swtch, Large Sgnal Operaton, Graphcal Analyss, JT at D, asng JT, Small Sgnal Operaton Model, Hybrd P-Model, TModel. Lecture # 7 1 Drecton of urrent Flow & Operaton for Amplfer Applcaton
JT as an Amplfer &a Swtch, Large Sgnal Operaton, Graphcal Analyss, JT at D, asng JT, Small Sgnal Operaton Model, Hybrd P-Model, TModel. Lecture # 7 1 Drecton of urrent Flow & Operaton for Amplfer Applcaton
The Design of M-Channel Linear Phase Wavelet-Like Filter Banks
 The Degn of -Chnne Lner Phe Wveet-Le Fter Bn X.. Xe B. Peng X. J. G.. Sh nd A. Fernndez-Vzquez Schoo of Eectronc Engneerng Xdn Unverty X n Chn xmxe@m.xdn.edu.cn bpeng@eee.org m.xoun@gm.com gmh@xdn.edu.cnfernn@noep.mx
The Degn of -Chnne Lner Phe Wveet-Le Fter Bn X.. Xe B. Peng X. J. G.. Sh nd A. Fernndez-Vzquez Schoo of Eectronc Engneerng Xdn Unverty X n Chn xmxe@m.xdn.edu.cn bpeng@eee.org m.xoun@gm.com gmh@xdn.edu.cnfernn@noep.mx
Demand. Demand and Comparative Statics. Graphically. Marshallian Demand. ECON 370: Microeconomic Theory Summer 2004 Rice University Stanley Gilbert
 Demnd Demnd nd Comrtve Sttcs ECON 370: Mcroeconomc Theory Summer 004 Rce Unversty Stnley Glbert Usng the tools we hve develoed u to ths ont, we cn now determne demnd for n ndvdul consumer We seek demnd
Demnd Demnd nd Comrtve Sttcs ECON 370: Mcroeconomc Theory Summer 004 Rce Unversty Stnley Glbert Usng the tools we hve develoed u to ths ont, we cn now determne demnd for n ndvdul consumer We seek demnd
VECTORS VECTORS VECTORS VECTORS. 2. Vector Representation. 1. Definition. 3. Types of Vectors. 5. Vector Operations I. 4. Equal and Opposite Vectors
 1. Defnton A vetor s n entt tht m represent phsl quntt tht hs mgntude nd dreton s opposed to slr tht ls dreton.. Vetor Representton A vetor n e represented grphll n rrow. The length of the rrow s the mgntude
1. Defnton A vetor s n entt tht m represent phsl quntt tht hs mgntude nd dreton s opposed to slr tht ls dreton.. Vetor Representton A vetor n e represented grphll n rrow. The length of the rrow s the mgntude
Scattering cross section (scattering width)
") Scatterng cro ecton (catterng wdth) We aw n the begnnng how a catterng cro ecton defned for a fnte catterer n ter of the cattered power An nfnte cylnder, however, not a fnte object The feld radated by
Scatterng cro ecton (catterng wdth) We aw n the begnnng how a catterng cro ecton defned for a fnte catterer n ter of the cattered power An nfnte cylnder, however, not a fnte object The feld radated by
Analysis of Geometric, Zernike and United Moment Invariants Techniques Based on Intra-class Evaluation
 0 Ffth Interntonl Conference on Intellgent Systes, odellng nd Sulton Anlyss of Geoetrc, ernke nd Unted oent Invrnts Technques Bsed on Intr-clss Evluton ohd Wf srudn *, Shhrul z Ykob, Roze Rzf Othn, Iszdy
0 Ffth Interntonl Conference on Intellgent Systes, odellng nd Sulton Anlyss of Geoetrc, ernke nd Unted oent Invrnts Technques Bsed on Intr-clss Evluton ohd Wf srudn *, Shhrul z Ykob, Roze Rzf Othn, Iszdy
Boise State University Department of Electrical and Computer Engineering ECE 212L Circuit Analysis and Design Lab
 Bose State Unersty Department of Electrcal and omputer Engneerng EE 1L rcut Analyss and Desgn Lab Experment #8: The Integratng and Dfferentatng Op-Amp rcuts 1 Objectes The objectes of ths laboratory experment
Bose State Unersty Department of Electrcal and omputer Engneerng EE 1L rcut Analyss and Desgn Lab Experment #8: The Integratng and Dfferentatng Op-Amp rcuts 1 Objectes The objectes of ths laboratory experment
Figure XX.1.1 Plane truss structure
 Truss Eements Formution. TRUSS ELEMENT.1 INTRODUTION ne truss struture is ste struture on the sis of tringe, s shown in Fig..1.1. The end of memer is pin juntion whih does not trnsmit moment. As for the
Truss Eements Formution. TRUSS ELEMENT.1 INTRODUTION ne truss struture is ste struture on the sis of tringe, s shown in Fig..1.1. The end of memer is pin juntion whih does not trnsmit moment. As for the
CHAPTER X PHASE-CHANGE PROBLEMS
 Chapter X Phae-Change Problem December 3, 18 917 CHAPER X PHASE-CHANGE PROBLEMS X.1 Introducton Clacal Stefan Problem Geometry of Phae Change Problem Interface Condton X. Analytcal Soluton for Soldfcaton
Chapter X Phae-Change Problem December 3, 18 917 CHAPER X PHASE-CHANGE PROBLEMS X.1 Introducton Clacal Stefan Problem Geometry of Phae Change Problem Interface Condton X. Analytcal Soluton for Soldfcaton
Circuits II EE221. Instructor: Kevin D. Donohue. Instantaneous, Average, RMS, and Apparent Power, and, Maximum Power Transfer, and Power Factors
 Crcuts II EE1 Unt 3 Instructor: Ken D. Donohue Instantaneous, Aerage, RMS, and Apparent Power, and, Maxmum Power pp ransfer, and Power Factors Power Defntons/Unts: Work s n unts of newton-meters or joules
Crcuts II EE1 Unt 3 Instructor: Ken D. Donohue Instantaneous, Aerage, RMS, and Apparent Power, and, Maxmum Power pp ransfer, and Power Factors Power Defntons/Unts: Work s n unts of newton-meters or joules
n α j x j = 0 j=1 has a nontrivial solution. Here A is the n k matrix whose jth column is the vector for all t j=0
 MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
Chapter #3 EEE Subsea Control and Communication Systems
 EEE 87 Chter #3 EEE 87 Sube Cotrol d Commuictio Sytem Cloed loo ytem Stedy tte error PID cotrol Other cotroller Chter 3 /3 EEE 87 Itroductio The geerl form for CL ytem: C R ', where ' c ' H or Oe Loo (OL)
EEE 87 Chter #3 EEE 87 Sube Cotrol d Commuictio Sytem Cloed loo ytem Stedy tte error PID cotrol Other cotroller Chter 3 /3 EEE 87 Itroductio The geerl form for CL ytem: C R ', where ' c ' H or Oe Loo (OL)
Physics for Scientists and Engineers I
 Phscs for Scentsts nd Engneers I PHY 48, Secton 4 Dr. Betr Roldán Cuen Unverst of Centrl Flord, Phscs Deprtment, Orlndo, FL Chpter - Introducton I. Generl II. Interntonl Sstem of Unts III. Converson of
Phscs for Scentsts nd Engneers I PHY 48, Secton 4 Dr. Betr Roldán Cuen Unverst of Centrl Flord, Phscs Deprtment, Orlndo, FL Chpter - Introducton I. Generl II. Interntonl Sstem of Unts III. Converson of
Engineering Tensors. Friday November 16, h30 -Muddy Charles. A BEH430 review session by Thomas Gervais.
 ngneerng Tensors References: BH4 reew sesson b Thoms Gers tgers@mt.ed Long, RR, Mechncs of Solds nd lds, Prentce-Hll, 96, pp - Deen, WD, nlss of trnsport phenomen, Oford, 998, p. 55-56 Goodbod, M, Crtesn
ngneerng Tensors References: BH4 reew sesson b Thoms Gers tgers@mt.ed Long, RR, Mechncs of Solds nd lds, Prentce-Hll, 96, pp - Deen, WD, nlss of trnsport phenomen, Oford, 998, p. 55-56 Goodbod, M, Crtesn
Note: Please use the actual date you accessed this material in your citation.
 MIT OpenCourseWare http://ocw.mt.edu 6.13/ESD.13J Electromagnetcs and Applcatons, Fall 5 Please use the followng ctaton format: Markus Zahn, Erch Ippen, and Davd Staeln, 6.13/ESD.13J Electromagnetcs and
MIT OpenCourseWare http://ocw.mt.edu 6.13/ESD.13J Electromagnetcs and Applcatons, Fall 5 Please use the followng ctaton format: Markus Zahn, Erch Ippen, and Davd Staeln, 6.13/ESD.13J Electromagnetcs and
APPENDIX F A DISPLACEMENT-BASED BEAM ELEMENT WITH SHEAR DEFORMATIONS. Never use a Cubic Function Approximation for a Non-Prismatic Beam
 APPENDIX F A DISPACEMENT-BASED BEAM EEMENT WITH SHEAR DEFORMATIONS Never use a Cubc Functon Approxmaton for a Non-Prsmatc Beam F. INTRODUCTION { XE "Shearng Deformatons" }In ths appendx a unque development
APPENDIX F A DISPACEMENT-BASED BEAM EEMENT WITH SHEAR DEFORMATIONS Never use a Cubc Functon Approxmaton for a Non-Prsmatc Beam F. INTRODUCTION { XE "Shearng Deformatons" }In ths appendx a unque development
SUMMARY OF STOICHIOMETRIC RELATIONS AND MEASURE OF REACTIONS' PROGRESS AND COMPOSITION FOR MULTIPLE REACTIONS
 UMMAY OF TOICHIOMETIC ELATION AND MEAUE OF EACTION' POGE AND COMPOITION FO MULTIPLE EACTION UPDATED 0/4/03 - AW APPENDIX A. In case of multple reactons t s mportant to fnd the number of ndependent reactons.
UMMAY OF TOICHIOMETIC ELATION AND MEAUE OF EACTION' POGE AND COMPOITION FO MULTIPLE EACTION UPDATED 0/4/03 - AW APPENDIX A. In case of multple reactons t s mportant to fnd the number of ndependent reactons.
ENGI 1313 Mechanics I
 ENGI 11 Mechancs I Lecture 40: Center of Gravty, Center of Mass and Geometrc Centrod Shan Kenny, Ph.D., P.Eng. ssstant Professor Faculty of Engneerng and ppled Scence Memoral Unversty of Nefoundland spkenny@engr.mun.ca
ENGI 11 Mechancs I Lecture 40: Center of Gravty, Center of Mass and Geometrc Centrod Shan Kenny, Ph.D., P.Eng. ssstant Professor Faculty of Engneerng and ppled Scence Memoral Unversty of Nefoundland spkenny@engr.mun.ca
Periodic Learning of B-spline Models for Output PDF Control: Application to MWD Control
 2005 Amercn Contro Conference June 8-10, 2005. Portnd, OR, USA WeB12.6 Perodc Lernng of B-spne Modes for Output PDF Contro: Appcton to MWD Contro H. Wng *, J. F. Zhng nd H. Yue Astrct Perodc ernng of B-spne
2005 Amercn Contro Conference June 8-10, 2005. Portnd, OR, USA WeB12.6 Perodc Lernng of B-spne Modes for Output PDF Contro: Appcton to MWD Contro H. Wng *, J. F. Zhng nd H. Yue Astrct Perodc ernng of B-spne
Geometric Correction or Georeferencing
 Geoetrc Correcton or Georeferencng GEOREFERENCING: fro ge to p Coordntes on erth: (λ, φ) ge: (, ) p: (, ) rel nteger Trnsfortons (nvolvng deforton): erth-to-ge: χ erth-to-p: ψ (crtogrphc proecton) ge-to-p:
Geoetrc Correcton or Georeferencng GEOREFERENCING: fro ge to p Coordntes on erth: (λ, φ) ge: (, ) p: (, ) rel nteger Trnsfortons (nvolvng deforton): erth-to-ge: χ erth-to-p: ψ (crtogrphc proecton) ge-to-p:
Rectilinear motion. Lecture 2: Kinematics of Particles. External motion is known, find force. External forces are known, find motion
 Lecture : Kneatcs of Partcles Rectlnear oton Straght-Lne oton [.1] Analtcal solutons for poston/veloct [.1] Solvng equatons of oton Analtcal solutons (1 D revew) [.1] Nuercal solutons [.1] Nuercal ntegraton
Lecture : Kneatcs of Partcles Rectlnear oton Straght-Lne oton [.1] Analtcal solutons for poston/veloct [.1] Solvng equatons of oton Analtcal solutons (1 D revew) [.1] Nuercal solutons [.1] Nuercal ntegraton
Chapter 8. Momentum, Impulse and Collisions (continued) 10/22/2014 Physics 218
 10/22/2014 Physics 218") Chater 8 Moentu, Iulse and Collsons (contnued 0//04 Physcs 8 Learnng Goals The eanng of the oentu of a artcle(syste and how the ulse of the net force actng on a artcle causes the oentu to change. The condtons
Chater 8 Moentu, Iulse and Collsons (contnued 0//04 Physcs 8 Learnng Goals The eanng of the oentu of a artcle(syste and how the ulse of the net force actng on a artcle causes the oentu to change. The condtons
Linear Open Loop Systems
 Colordo School of Me CHEN43 Trfer Fucto Ler Ope Loop Sytem Ler Ope Loop Sytem... Trfer Fucto for Smple Proce... Exmple Trfer Fucto Mercury Thermometer... 2 Derblty of Devto Vrble... 3 Trfer Fucto for Proce
Colordo School of Me CHEN43 Trfer Fucto Ler Ope Loop Sytem Ler Ope Loop Sytem... Trfer Fucto for Smple Proce... Exmple Trfer Fucto Mercury Thermometer... 2 Derblty of Devto Vrble... 3 Trfer Fucto for Proce
Study on the Normal and Skewed Distribution of Isometric Grouping
 Open Journ of Sttstcs 7-5 http://dx.do.org/.36/ojs..56 Pubshed Onne October (http://www.scp.org/journ/ojs) Study on the orm nd Skewed Dstrbuton of Isometrc Groupng Zhensheng J Wenk J Schoo of Economcs
Open Journ of Sttstcs 7-5 http://dx.do.org/.36/ojs..56 Pubshed Onne October (http://www.scp.org/journ/ojs) Study on the orm nd Skewed Dstrbuton of Isometrc Groupng Zhensheng J Wenk J Schoo of Economcs