Chapter 3 Convolution Representation
|
|
|
- Angelica Richards
- 5 years ago
- Views:
Transcription
1 Chapter 3 Convolution Representation
2 DT Unit-Impulse Response Consider the DT SISO system: xn [ ] System yn [ ] xn [ ] = δ[ n] If the input signal is and the system has no energy at n = 0, the output yn [ ] = hn [ ] is called the impulse response of the system δ[ n] System hn [ ]
![Example Consider the DT system described by yn [ ] + ayn [ 1] = bxn [ ] Its](/docs-images/90/104468043/images/3-0.jpg "impulse response can be found to be n ( a) b, n= 0,1,2, hn [ ] = 0, n = 1, 2,")
3 Example Consider the DT system described by yn [ ] + ayn [ 1] = bxn [ ] Its impulse response can be found to be n ( a) b, n= 0,1,2, hn [ ] = 0, n = 1, 2, 3,
4 Representing Signals in Terms of Shifted and Scaled Impulses Let x[n] be an arbitrary input signal to a DT LTI system Suppose that for This signal can be represented as xn [ ] = x[0] δ[ n] + x[1] δ[ n 1] + x[2] δ[ n 2] + = = i= 0 xn [ ] = 0 n = 1, 2, xi [] δ[ n i], n 0,1,2,

5 Exploiting Time-Invariance and Linearity yn [ ] = xihn [ ] [ i], n 0 i= 0
6 The Convolution Sum This particular summation is called the convolution sum yn [ ] = xihn [ ] [ i] i= 0 xn [ ] hn [ ] yn [ ] = xn [ ] hn [ ] Equation is called the convolution representation of the system Remark: a DT LTI system is completely described by its impulse response h[n]
7 Block Diagram Representation of DT LTI Systems Since the impulse response h[n] provides the complete description of a DT LTI system, we write xn [ ] hn [ ] yn [ ]
8 The Convolution Sum for Noncausal Signals Suppose that we have two signals x[n] and v[n] that are not zero for negative times (noncausal signals) Then, their convolution is expressed by the two-sided series yn [ ] = xivn [ ] [ i] i=
![Example: Convolution of Two Rectangular Pulses Suppose that both x[n] and](/docs-images/90/104468043/images/9-0.jpg "v[n] are equal to the rectangular pulse p[n] (causal signal) depicted")
9 Example: Convolution of Two Rectangular Pulses Suppose that both x[n] and v[n] are equal to the rectangular pulse p[n] (causal signal) depicted below
![The Folded Pulse v[ i] The signal is equal to](/docs-images/90/104468043/images/10-0.jpg "the pulse p[i] folded about the vertical axis")
10 The Folded Pulse v[ i] The signal is equal to the pulse p[i] folded about the vertical axis
![vn [ i ] xi](/docs-images/90/104468043/images/11-0.jpg "[] Sliding")
11 vn [ i ] xi [] Sliding over
![vn [ i ] xi []](/docs-images/90/104468043/images/12-0.jpg "Sliding over -")
12 vn [ i ] xi [] Sliding over - Cont d
![Plot of xn [ ]](/docs-images/90/104468043/images/13-0.jpg "vn [ ] Plot of")
13 Plot of xn [ ] vn [ ] Plot of
14 Properties of the Convolution Sum Associativity xn [ ] ( vn [ ] wn [ ]) = ( xn [ ] vn [ ]) wn [ ] Commutativity xn [ ] vn [ ] = vn [ ] xn [ ] Distributivity w.r.t. addition xn [ ] ( vn [ ] + wn [ ]) = xn [ ] vn [ ] + xn [ ] wn [ ]
15 Properties of the Convolution Sum - Cont d x [ q n ] = x [ n q ] v [ q n ] = v [ n q ] wn [ ] = xn [ ] vn [ ] w[ n q] = x [ n] v[ n] = x[ n] v [ n] Shift property: define then q Convolution with the unit impulse xn [ ] δ[ n] = xn [ ] Convolution with the shifted unit impulse xn [ ] δ [ n] = xn [ q] q q
16 Example: Computing Convolution with Matlab Consider the DT LTI system xn [ ] hn [ ] yn [ ] impulse response: input signal: hn [ ] = sin(0.5 n), n 0 xn [ ] = sin(0.2 n), n 0

![Cont d hn [ ] = sin(0.](/docs-images/90/104468043/images/17-1.jpg "5 n), n 0 xn [ ] = sin(0.")
17 Example: Computing Convolution with Matlab Cont d hn [ ] = sin(0.5 n), n 0 xn [ ] = sin(0.2 n), n 0
18 Example: Computing Convolution with Matlab Cont d Suppose we want to compute y[n] for n = 0,1,,40 Matlab code: n=0:40; x=sin(0.2*n); h=sin(0.5*n); y=conv(x,h); stem(n,y(1:length(n)))

19 Example: Computing Convolution with Matlab Cont d yn [ ] = xn [ ] hn [ ]
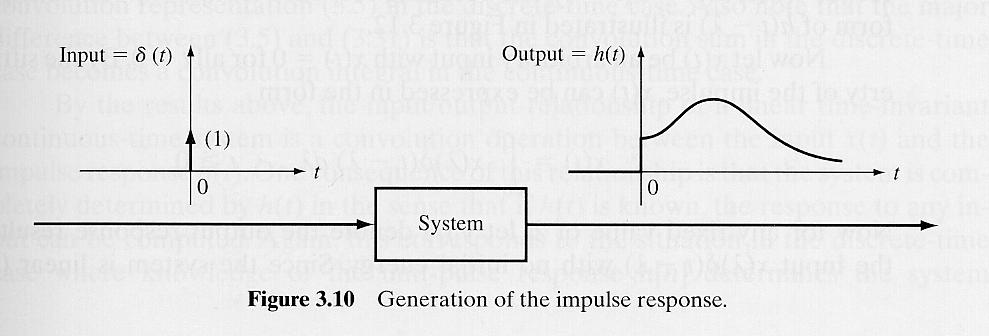
20 CT Unit-Impulse Response Consider the CT SISO system: xt () System yt () xt () = δ () t If the input signal is and the system has no energy at t = 0, the output yt () = ht () is called the impulse response of the system δ () t System ht ()
21 Exploiting Time-Invariance Let x[n] be an arbitrary input signal with xt () = 0, for t< 0 Using the sifting property of δ () t, we may write xt () = x( τδ ) ( t τ) dτ, t 0 0 Exploiting time-invariance invariance, it is δ ( t τ ) System ht ( τ )
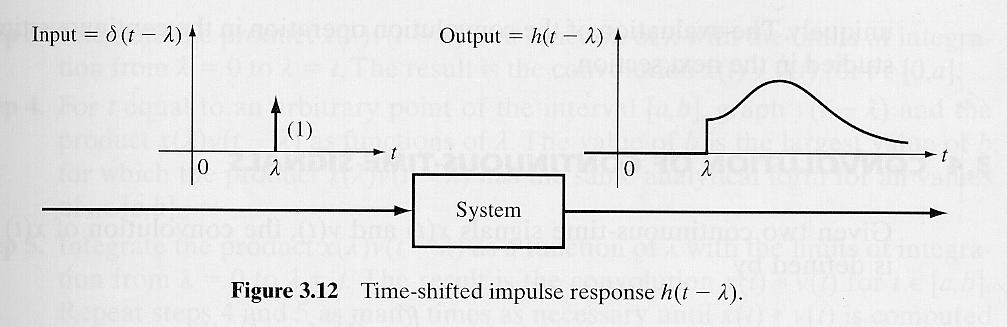
22 Exploiting Time-Invariance
23 Exploiting Linearity Exploiting linearity, it is yt () = x( τ) ht ( τ) dτ, t 0 0 x( ) h( t ) If the integrand τ τ does not contain an impulse located at τ = 0, the lower limit of the integral can be taken to be 0,i.e., yt () = x( τ) ht ( τ) dτ, t 0 0
24 The Convolution Integral This particular integration is called the convolution integral yt () = x( τ) ht ( τ) dτ, t 0 0 xt () ht () yt () = xt () ht () Equation is called the convolution representation of the system Remark: a CT LTI system is completely described by its impulse response h(t)
25 Block Diagram Representation of CT LTI Systems Since the impulse response h(t) provides the complete description of a CT LTI system, we write xt () ht () yt ()
26 Example: Analytical Computation of the Convolution Integral xt () = ht () = pt (), Suppose that where p(t) is the rectangular pulse depicted in figure pt () 0 T t
27 Example Cont d In order to compute the convolution integral yt () = x( τ) ht ( τ) dτ, t 0 0 we have to consider four cases:
28 Case 1: t 0 Example Cont d ht ( τ ) x( τ ) t T t 0 T τ yt () = 0
29 Case 2:0 t T Example Cont d ht ( τ ) x( τ ) t T 0 t T τ t yt () = dτ = t 0
30 Example Cont d Case 3: 0 t T T T t 2T x( τ ) ht ( τ ) 0 t T T t τ T yt () = dτ = T ( t T) = 2T t t T
31 Example Cont d Case 4: T t T 2T t x( τ ) ht ( τ ) 0 T t T t τ yt () = 0
32 Example Cont d yt () = xt () ht () T 0 t 2T
33 Properties of the Convolution Integral Associativity xt () ( vt () wt ()) = ( xt () vt ()) wt () Commutativity xt () vt () = vt () xt () Distributivity w.r.t. addition xt () ( vt () + wt ()) = xt () vt () + xt () wt ()
34 Properties of the Convolution Integral - Cont d x () q t = x ( t q ) v () q t = v ( t q ) wt () = xt () vt () w( t q) = x () t v() t = x() t v () t Shift property: define then Convolution with the unit impulse q xt () δ () t = xt () Convolution with the shifted unit impulse xt () δ () t = xt ( q) q q
35 Properties of the Convolution Integral - Cont d Derivative property: if the signal x(t) is differentiable, then it is d dt dx() t xt () vt () = vt () dt [ ] If both x(t) and v(t) are differentiable, then it is also d 2 [ xt () vt ()] = dx t dv t 2 () () dt dt dt
36 Properties of the Convolution Integral - Cont d Integration property: define t then ( 1) x () t x( τ ) d t ( 1) v () t v( ) d ( 1) ( 1) ( 1) ( x v) () t = x () t v() t = x() t v () t τ τ τ
37 Representation of a CT LTI System in Terms of the Unit-Step Response Let g(t) be the response of a system with impulse response h(t) when xt () = ut () with no initial energy at time, i.e., t = 0 ut () ht () gt () Therefore, it is gt () = ht () ut ()
38 Representation of a CT LTI System in Terms of the Unit-Step Response Cont d Differentiating both sides Recalling that it is dg () t () () = dh t ut () = ht () du t dt dt dt du() t dt dg() t dt = δ () t and ht () = ht () δ () t = ht () or t gt () = h( τ ) dτ 0
06/12/ rws/jMc- modif SuFY10 (MPF) - Textbook Section IX 1
 - Textbook Section IX 1") IV. Continuous-Time Signals & LTI Systems [p. 3] Analog signal definition [p. 4] Periodic signal [p. 5] One-sided signal [p. 6] Finite length signal [p. 7] Impulse function [p. 9] Sampling property [p.11]
IV. Continuous-Time Signals & LTI Systems [p. 3] Analog signal definition [p. 4] Periodic signal [p. 5] One-sided signal [p. 6] Finite length signal [p. 7] Impulse function [p. 9] Sampling property [p.11]
2. CONVOLUTION. Convolution sum. Response of d.t. LTI systems at a certain input signal
 2. CONVOLUTION Convolution sum. Response of d.t. LTI systems at a certain input signal Any signal multiplied by the unit impulse = the unit impulse weighted by the value of the signal in 0: xn [ ] δ [
2. CONVOLUTION Convolution sum. Response of d.t. LTI systems at a certain input signal Any signal multiplied by the unit impulse = the unit impulse weighted by the value of the signal in 0: xn [ ] δ [
x(t) = t[u(t 1) u(t 2)] + 1[u(t 2) u(t 3)]
![x(t) = t[u(t 1) u(t 2)] + 1[u(t 2) u(t 3)]](/thumbs/96/128551587.jpg "x(t) = t[u(t 1) u(t 2)] + 1[u(t 2) u(t 3)]") ECE30 Summer II, 2006 Exam, Blue Version July 2, 2006 Name: Solution Score: 00/00 You must show all of your work for full credit. Calculators may NOT be used.. (5 points) x(t) = tu(t ) + ( t)u(t 2) u(t
ECE30 Summer II, 2006 Exam, Blue Version July 2, 2006 Name: Solution Score: 00/00 You must show all of your work for full credit. Calculators may NOT be used.. (5 points) x(t) = tu(t ) + ( t)u(t 2) u(t
EE 210. Signals and Systems Solutions of homework 2
 EE 2. Signals and Systems Solutions of homework 2 Spring 2 Exercise Due Date Week of 22 nd Feb. Problems Q Compute and sketch the output y[n] of each discrete-time LTI system below with impulse response
EE 2. Signals and Systems Solutions of homework 2 Spring 2 Exercise Due Date Week of 22 nd Feb. Problems Q Compute and sketch the output y[n] of each discrete-time LTI system below with impulse response
Interconnection of LTI Systems
 EENG226 Signals and Systems Chapter 2 Time-Domain Representations of Linear Time-Invariant Systems Interconnection of LTI Systems Prof. Dr. Hasan AMCA Electrical and Electronic Engineering Department (ee.emu.edu.tr)
EENG226 Signals and Systems Chapter 2 Time-Domain Representations of Linear Time-Invariant Systems Interconnection of LTI Systems Prof. Dr. Hasan AMCA Electrical and Electronic Engineering Department (ee.emu.edu.tr)
ECE 308 Discrete-Time Signals and Systems
 ECE 38-6 ECE 38 Discrete-Time Signals and Systems Z. Aliyazicioglu Electrical and Computer Engineering Department Cal Poly Pomona ECE 38-6 1 Intoduction Two basic methods for analyzing the response of
ECE 38-6 ECE 38 Discrete-Time Signals and Systems Z. Aliyazicioglu Electrical and Computer Engineering Department Cal Poly Pomona ECE 38-6 1 Intoduction Two basic methods for analyzing the response of
NAME: 13 February 2013 EE301 Signals and Systems Exam 1 Cover Sheet
 NAME: February EE Signals and Systems Exam Cover Sheet Test Duration: 75 minutes. Coverage: Chaps., Open Book but Closed Notes. One 8.5 in. x in. crib sheet Calculators NOT allowed. This test contains
NAME: February EE Signals and Systems Exam Cover Sheet Test Duration: 75 minutes. Coverage: Chaps., Open Book but Closed Notes. One 8.5 in. x in. crib sheet Calculators NOT allowed. This test contains
Ch 2: Linear Time-Invariant System
 Ch 2: Linear Time-Invariant System A system is said to be Linear Time-Invariant (LTI) if it possesses the basic system properties of linearity and time-invariance. Consider a system with an output signal
Ch 2: Linear Time-Invariant System A system is said to be Linear Time-Invariant (LTI) if it possesses the basic system properties of linearity and time-invariance. Consider a system with an output signal
Figure 1 A linear, time-invariant circuit. It s important to us that the circuit is both linear and time-invariant. To see why, let s us the notation
 Convolution In this section we consider the problem of determining the response of a linear, time-invariant circuit to an arbitrary input, x(t). This situation is illustrated in Figure 1 where x(t) is
Convolution In this section we consider the problem of determining the response of a linear, time-invariant circuit to an arbitrary input, x(t). This situation is illustrated in Figure 1 where x(t) is
Question Paper Code : AEC11T02
 Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Hall Ticket No Question Paper Code : AEC11T02 VARDHAMAN COLLEGE OF ENGINEERING (AUTONOMOUS) Affiliated to JNTUH, Hyderabad Four Year B. Tech III Semester Tutorial Question Bank 2013-14 (Regulations: VCE-R11)
Using MATLAB with the Convolution Method
 ECE 350 Linear Systems I MATLAB Tutorial #5 Using MATLAB with the Convolution Method A linear system with input, x(t), and output, y(t), can be described in terms of its impulse response, h(t). x(t) h(t)
ECE 350 Linear Systems I MATLAB Tutorial #5 Using MATLAB with the Convolution Method A linear system with input, x(t), and output, y(t), can be described in terms of its impulse response, h(t). x(t) h(t)
Chapter 2 Time-Domain Representations of LTI Systems
 Chapter 2 Time-Domain Representations of LTI Systems 1 Introduction Impulse responses of LTI systems Linear constant-coefficients differential or difference equations of LTI systems Block diagram representations
Chapter 2 Time-Domain Representations of LTI Systems 1 Introduction Impulse responses of LTI systems Linear constant-coefficients differential or difference equations of LTI systems Block diagram representations
Rui Wang, Assistant professor Dept. of Information and Communication Tongji University.
 Linear Time Invariant (LTI) Systems Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Discrete-time LTI system: The convolution
Linear Time Invariant (LTI) Systems Rui Wang, Assistant professor Dept. of Information and Communication Tongji University it Email: ruiwang@tongji.edu.cn Outline Discrete-time LTI system: The convolution
LTI Systems (Continuous & Discrete) - Basics
 - Basics") LTI Systems (Continuous & Discrete) - Basics 1. A system with an input x(t) and output y(t) is described by the relation: y(t) = t. x(t). This system is (a) linear and time-invariant (b) linear and time-varying
LTI Systems (Continuous & Discrete) - Basics 1. A system with an input x(t) and output y(t) is described by the relation: y(t) = t. x(t). This system is (a) linear and time-invariant (b) linear and time-varying
NAME: 23 February 2017 EE301 Signals and Systems Exam 1 Cover Sheet
 NAME: 23 February 2017 EE301 Signals and Systems Exam 1 Cover Sheet Test Duration: 75 minutes Coverage: Chaps 1,2 Open Book but Closed Notes One 85 in x 11 in crib sheet Calculators NOT allowed DO NOT
NAME: 23 February 2017 EE301 Signals and Systems Exam 1 Cover Sheet Test Duration: 75 minutes Coverage: Chaps 1,2 Open Book but Closed Notes One 85 in x 11 in crib sheet Calculators NOT allowed DO NOT
EEL3135: Homework #4
 EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
EEL335: Homework #4 Problem : For each of the systems below, determine whether or not the system is () linear, () time-invariant, and (3) causal: (a) (b) (c) xn [ ] cos( 04πn) (d) xn [ ] xn [ ] xn [ 5]
Chapter 1 Fundamental Concepts
 Chapter 1 Fundamental Concepts 1 Signals A signal is a pattern of variation of a physical quantity, often as a function of time (but also space, distance, position, etc). These quantities are usually the
Chapter 1 Fundamental Concepts 1 Signals A signal is a pattern of variation of a physical quantity, often as a function of time (but also space, distance, position, etc). These quantities are usually the
Laplace Transforms and use in Automatic Control
 Laplace Transforms and use in Automatic Control P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: P.Santosh Krishna, SYSCON Recap Fourier series Fourier transform: aperiodic Convolution integral
Laplace Transforms and use in Automatic Control P.S. Gandhi Mechanical Engineering IIT Bombay Acknowledgements: P.Santosh Krishna, SYSCON Recap Fourier series Fourier transform: aperiodic Convolution integral
Therefore the new Fourier coefficients are. Module 2 : Signals in Frequency Domain Problem Set 2. Problem 1
 Module 2 : Signals in Frequency Domain Problem Set 2 Problem 1 Let be a periodic signal with fundamental period T and Fourier series coefficients. Derive the Fourier series coefficients of each of the
Module 2 : Signals in Frequency Domain Problem Set 2 Problem 1 Let be a periodic signal with fundamental period T and Fourier series coefficients. Derive the Fourier series coefficients of each of the
The Convolution Sum for Discrete-Time LTI Systems
 The Convolution Sum for Discrete-Time LTI Systems Andrew W. H. House 01 June 004 1 The Basics of the Convolution Sum Consider a DT LTI system, L. x(n) L y(n) DT convolution is based on an earlier result
The Convolution Sum for Discrete-Time LTI Systems Andrew W. H. House 01 June 004 1 The Basics of the Convolution Sum Consider a DT LTI system, L. x(n) L y(n) DT convolution is based on an earlier result
GATE EE Topic wise Questions SIGNALS & SYSTEMS
 www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
www.gatehelp.com GATE EE Topic wise Questions YEAR 010 ONE MARK Question. 1 For the system /( s + 1), the approximate time taken for a step response to reach 98% of the final value is (A) 1 s (B) s (C)
Chapter 5 Frequency Domain Analysis of Systems
 Chapter 5 Frequency Domain Analysis of Systems CT, LTI Systems Consider the following CT LTI system: xt () ht () yt () Assumption: the impulse response h(t) is absolutely integrable, i.e., ht ( ) dt< (this
Chapter 5 Frequency Domain Analysis of Systems CT, LTI Systems Consider the following CT LTI system: xt () ht () yt () Assumption: the impulse response h(t) is absolutely integrable, i.e., ht ( ) dt< (this
ECE 301 Division 1 Exam 1 Solutions, 10/6/2011, 8-9:45pm in ME 1061.
 ECE 301 Division 1 Exam 1 Solutions, 10/6/011, 8-9:45pm in ME 1061. Your ID will be checked during the exam. Please bring a No. pencil to fill out the answer sheet. This is a closed-book exam. No calculators
ECE 301 Division 1 Exam 1 Solutions, 10/6/011, 8-9:45pm in ME 1061. Your ID will be checked during the exam. Please bring a No. pencil to fill out the answer sheet. This is a closed-book exam. No calculators
Problem Value Score No/Wrong Rec 3
 GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING QUIZ #3 DATE: 21-Nov-11 COURSE: ECE-2025 NAME: GT username: LAST, FIRST (ex: gpburdell3) 3 points 3 points 3 points Recitation
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING QUIZ #3 DATE: 21-Nov-11 COURSE: ECE-2025 NAME: GT username: LAST, FIRST (ex: gpburdell3) 3 points 3 points 3 points Recitation
Chapter 1 Fundamental Concepts
 Chapter 1 Fundamental Concepts Signals A signal is a pattern of variation of a physical quantity as a function of time, space, distance, position, temperature, pressure, etc. These quantities are usually
Chapter 1 Fundamental Concepts Signals A signal is a pattern of variation of a physical quantity as a function of time, space, distance, position, temperature, pressure, etc. These quantities are usually
Discussion Section #2, 31 Jan 2014
 Discussion Section #2, 31 Jan 2014 Lillian Ratliff 1 Unit Impulse The unit impulse (Dirac delta) has the following properties: { 0, t 0 δ(t) =, t = 0 ε ε δ(t) = 1 Remark 1. Important!: An ordinary function
Discussion Section #2, 31 Jan 2014 Lillian Ratliff 1 Unit Impulse The unit impulse (Dirac delta) has the following properties: { 0, t 0 δ(t) =, t = 0 ε ε δ(t) = 1 Remark 1. Important!: An ordinary function
ECE-314 Fall 2012 Review Questions for Midterm Examination II
 ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
ECE-314 Fall 2012 Review Questions for Midterm Examination II First, make sure you study all the problems and their solutions from homework sets 4-7. Then work on the following additional problems. Problem
信號與系統 Signals and Systems
 Spring 2010 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb10 Jun10 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Spring 2010 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb10 Jun10 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Chapter 2: Time-Domain Representations of Linear Time-Invariant Systems. Chih-Wei Liu
 Chapter : Time-Domain Representations of Linear Time-Invariant Systems Chih-Wei Liu Outline Characteristics of Systems Described by Differential and Difference Equations Block Diagram Representations State-Variable
Chapter : Time-Domain Representations of Linear Time-Invariant Systems Chih-Wei Liu Outline Characteristics of Systems Described by Differential and Difference Equations Block Diagram Representations State-Variable
New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2015 Final Exam
 New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2015 Name: Solve problems 1 3 and two from problems 4 7. Circle below which two of problems 4 7 you
New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2015 Name: Solve problems 1 3 and two from problems 4 7. Circle below which two of problems 4 7 you
Properties of LTI Systems
 Properties of LTI Systems Properties of Continuous Time LTI Systems Systems with or without memory: A system is memory less if its output at any time depends only on the value of the input at that same
Properties of LTI Systems Properties of Continuous Time LTI Systems Systems with or without memory: A system is memory less if its output at any time depends only on the value of the input at that same
New Mexico State University Klipsch School of Electrical Engineering. EE312 - Signals and Systems I Spring 2018 Exam #1
 New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Spring 2018 Exam #1 Name: Prob. 1 Prob. 2 Prob. 3 Prob. 4 Total / 30 points / 20 points / 25 points /
New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Spring 2018 Exam #1 Name: Prob. 1 Prob. 2 Prob. 3 Prob. 4 Total / 30 points / 20 points / 25 points /
NAME: 20 February 2014 EE301 Signals and Systems Exam 1 Cover Sheet
 NAME: February 4 EE Signals and Systems Exam Cover Sheet Test Duration: 75 minutes. Coverage: Chaps., Open Book but Closed Notes. One 8.5 in. x in. crib sheet Calculators NOT allowed. This test contains
NAME: February 4 EE Signals and Systems Exam Cover Sheet Test Duration: 75 minutes. Coverage: Chaps., Open Book but Closed Notes. One 8.5 in. x in. crib sheet Calculators NOT allowed. This test contains
信號與系統 Signals and Systems
 Spring 2015 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb15 Jun15 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
Spring 2015 信號與系統 Signals and Systems Chapter SS-2 Linear Time-Invariant Systems Feng-Li Lian NTU-EE Feb15 Jun15 Figures and images used in these lecture notes are adopted from Signals & Systems by Alan
E2.5 Signals & Linear Systems. Tutorial Sheet 1 Introduction to Signals & Systems (Lectures 1 & 2)
") E.5 Signals & Linear Systems Tutorial Sheet 1 Introduction to Signals & Systems (Lectures 1 & ) 1. Sketch each of the following continuous-time signals, specify if the signal is periodic/non-periodic,
E.5 Signals & Linear Systems Tutorial Sheet 1 Introduction to Signals & Systems (Lectures 1 & ) 1. Sketch each of the following continuous-time signals, specify if the signal is periodic/non-periodic,
2 Classification of Continuous-Time Systems
 Continuous-Time Signals and Systems 1 Preliminaries Notation for a continuous-time signal: x(t) Notation: If x is the input to a system T and y the corresponding output, then we use one of the following
Continuous-Time Signals and Systems 1 Preliminaries Notation for a continuous-time signal: x(t) Notation: If x is the input to a system T and y the corresponding output, then we use one of the following
1.4 Unit Step & Unit Impulse Functions
 1.4 Unit Step & Unit Impulse Functions 1.4.1 The Discrete-Time Unit Impulse and Unit-Step Sequences Unit Impulse Function: δ n = ቊ 0, 1, n 0 n = 0 Figure 1.28: Discrete-time Unit Impulse (sample) 1 [n]
1.4 Unit Step & Unit Impulse Functions 1.4.1 The Discrete-Time Unit Impulse and Unit-Step Sequences Unit Impulse Function: δ n = ቊ 0, 1, n 0 n = 0 Figure 1.28: Discrete-time Unit Impulse (sample) 1 [n]
2. Time-Domain Analysis of Continuous- Time Signals and Systems
 2. Time-Domain Analysis of Continuous- Time Signals and Systems 2.1. Continuous-Time Impulse Function (1.4.2) 2.2. Convolution Integral (2.2) 2.3. Continuous-Time Impulse Response (2.2) 2.4. Classification
2. Time-Domain Analysis of Continuous- Time Signals and Systems 2.1. Continuous-Time Impulse Function (1.4.2) 2.2. Convolution Integral (2.2) 2.3. Continuous-Time Impulse Response (2.2) 2.4. Classification
New Mexico State University Klipsch School of Electrical Engineering. EE312 - Signals and Systems I Fall 2017 Exam #1
 New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2017 Exam #1 Name: Prob. 1 Prob. 2 Prob. 3 Prob. 4 Total / 30 points / 20 points / 25 points / 25
New Mexico State University Klipsch School of Electrical Engineering EE312 - Signals and Systems I Fall 2017 Exam #1 Name: Prob. 1 Prob. 2 Prob. 3 Prob. 4 Total / 30 points / 20 points / 25 points / 25
Digital Signal Processing Lecture 5
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 5 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 5 Begüm Demir E-mail:
Z - Transform. It offers the techniques for digital filter design and frequency analysis of digital signals.
 Z - Transform The z-transform is a very important tool in describing and analyzing digital systems. It offers the techniques for digital filter design and frequency analysis of digital signals. Definition
Z - Transform The z-transform is a very important tool in describing and analyzing digital systems. It offers the techniques for digital filter design and frequency analysis of digital signals. Definition
Ch 4: The Continuous-Time Fourier Transform
 Ch 4: The Continuous-Time Fourier Transform Fourier Transform of x(t) Inverse Fourier Transform jt X ( j) x ( t ) e dt jt x ( t ) X ( j) e d 2 Ghulam Muhammad, King Saud University Continuous-time aperiodic
Ch 4: The Continuous-Time Fourier Transform Fourier Transform of x(t) Inverse Fourier Transform jt X ( j) x ( t ) e dt jt x ( t ) X ( j) e d 2 Ghulam Muhammad, King Saud University Continuous-time aperiodic
 DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
DIGITAL SIGNAL PROCESSING UNIT 1 SIGNALS AND SYSTEMS 1. What is a continuous and discrete time signal? Continuous time signal: A signal x(t) is said to be continuous if it is defined for all time t. Continuous
The objective of this LabVIEW Mini Project was to understand the following concepts:
 1. Objective The objective of this LabVIEW Mini Project was to understand the following concepts: The convolution of two functions Creating LABVIEW Virtual Instruments see the visual representation of
1. Objective The objective of this LabVIEW Mini Project was to understand the following concepts: The convolution of two functions Creating LABVIEW Virtual Instruments see the visual representation of
ECEN 420 LINEAR CONTROL SYSTEMS. Lecture 2 Laplace Transform I 1/52
 1/52 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 2 Laplace Transform I Linear Time Invariant Systems A general LTI system may be described by the linear constant coefficient differential equation: a n d n
1/52 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 2 Laplace Transform I Linear Time Invariant Systems A general LTI system may be described by the linear constant coefficient differential equation: a n d n
ELEG 305: Digital Signal Processing
 ELEG 305: Digital Signal Processing Lecture : Design of Digital IIR Filters (Part I) Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner (Univ.
ELEG 305: Digital Signal Processing Lecture : Design of Digital IIR Filters (Part I) Kenneth E. Barner Department of Electrical and Computer Engineering University of Delaware Fall 008 K. E. Barner (Univ.
Convolution. Define a mathematical operation on discrete-time signals called convolution, represented by *. Given two discrete-time signals x 1, x 2,
 Filters Filters So far: Sound signals, connection to Fourier Series, Introduction to Fourier Series and Transforms, Introduction to the FFT Today Filters Filters: Keep part of the signal we are interested
Filters Filters So far: Sound signals, connection to Fourier Series, Introduction to Fourier Series and Transforms, Introduction to the FFT Today Filters Filters: Keep part of the signal we are interested
Aspects of Continuous- and Discrete-Time Signals and Systems
 Aspects of Continuous- and Discrete-Time Signals and Systems C.S. Ramalingam Department of Electrical Engineering IIT Madras C.S. Ramalingam (EE Dept., IIT Madras) Networks and Systems 1 / 45 Scaling the
Aspects of Continuous- and Discrete-Time Signals and Systems C.S. Ramalingam Department of Electrical Engineering IIT Madras C.S. Ramalingam (EE Dept., IIT Madras) Networks and Systems 1 / 45 Scaling the
ENGIN 211, Engineering Math. Laplace Transforms
 ENGIN 211, Engineering Math Laplace Transforms 1 Why Laplace Transform? Laplace transform converts a function in the time domain to its frequency domain. It is a powerful, systematic method in solving
ENGIN 211, Engineering Math Laplace Transforms 1 Why Laplace Transform? Laplace transform converts a function in the time domain to its frequency domain. It is a powerful, systematic method in solving
e st f (t) dt = e st tf(t) dt = L {t f(t)} s
 dt = e st tf(t) dt = L {t f(t)} s") Additional operational properties How to find the Laplace transform of a function f (t) that is multiplied by a monomial t n, the transform of a special type of integral, and the transform of a periodic
Additional operational properties How to find the Laplace transform of a function f (t) that is multiplied by a monomial t n, the transform of a special type of integral, and the transform of a periodic
Noise - irrelevant data; variability in a quantity that has no meaning or significance. In most cases this is modeled as a random variable.
 1.1 Signals and Systems Signals convey information. Systems respond to (or process) information. Engineers desire mathematical models for signals and systems in order to solve design problems efficiently
1.1 Signals and Systems Signals convey information. Systems respond to (or process) information. Engineers desire mathematical models for signals and systems in order to solve design problems efficiently
Chapter 2: Linear systems & sinusoids OVE EDFORS DEPT. OF EIT, LUND UNIVERSITY
 Chapter 2: Linear systems & sinusoids OVE EDFORS DEPT. OF EIT, LUND UNIVERSITY Learning outcomes After this lecture, the student should understand what a linear system is, including linearity conditions,
Chapter 2: Linear systems & sinusoids OVE EDFORS DEPT. OF EIT, LUND UNIVERSITY Learning outcomes After this lecture, the student should understand what a linear system is, including linearity conditions,
Module 1: Signals & System
 Module 1: Signals & System Lecture 6: Basic Signals in Detail Basic Signals in detail We now introduce formally some of the basic signals namely 1) The Unit Impulse function. 2) The Unit Step function
Module 1: Signals & System Lecture 6: Basic Signals in Detail Basic Signals in detail We now introduce formally some of the basic signals namely 1) The Unit Impulse function. 2) The Unit Step function
Chapter 5 Frequency Domain Analysis of Systems
 Chapter 5 Frequency Domain Analysis of Systems CT, LTI Systems Consider the following CT LTI system: xt () ht () yt () Assumption: the impulse response h(t) is absolutely integrable, i.e., ht ( ) dt< (this
Chapter 5 Frequency Domain Analysis of Systems CT, LTI Systems Consider the following CT LTI system: xt () ht () yt () Assumption: the impulse response h(t) is absolutely integrable, i.e., ht ( ) dt< (this
ENSC327 Communications Systems 2: Fourier Representations. Jie Liang School of Engineering Science Simon Fraser University
 ENSC327 Communications Systems 2: Fourier Representations Jie Liang School of Engineering Science Simon Fraser University 1 Outline Chap 2.1 2.5: Signal Classifications Fourier Transform Dirac Delta Function
ENSC327 Communications Systems 2: Fourier Representations Jie Liang School of Engineering Science Simon Fraser University 1 Outline Chap 2.1 2.5: Signal Classifications Fourier Transform Dirac Delta Function
Digital Signal Processing Lecture 3 - Discrete-Time Systems
 Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Digital Signal Processing - Discrete-Time Systems Electrical Engineering and Computer Science University of Tennessee, Knoxville August 25, 2015 Overview 1 2 3 4 5 6 7 8 Introduction Three components of
Lecture 2 Discrete-Time LTI Systems: Introduction
 Lecture 2 Discrete-Time LTI Systems: Introduction Outline 2.1 Classification of Systems.............................. 1 2.1.1 Memoryless................................. 1 2.1.2 Causal....................................
Lecture 2 Discrete-Time LTI Systems: Introduction Outline 2.1 Classification of Systems.............................. 1 2.1.1 Memoryless................................. 1 2.1.2 Causal....................................
Analog vs. discrete signals
 Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
Analog vs. discrete signals Continuous-time signals are also known as analog signals because their amplitude is analogous (i.e., proportional) to the physical quantity they represent. Discrete-time signals
ECE 301 Fall 2011 Division 1 Homework 5 Solutions
 ECE 301 Fall 2011 ivision 1 Homework 5 Solutions Reading: Sections 2.4, 3.1, and 3.2 in the textbook. Problem 1. Suppose system S is initially at rest and satisfies the following input-output difference
ECE 301 Fall 2011 ivision 1 Homework 5 Solutions Reading: Sections 2.4, 3.1, and 3.2 in the textbook. Problem 1. Suppose system S is initially at rest and satisfies the following input-output difference
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE)
") QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
QUESTION BANK SIGNALS AND SYSTEMS (4 th SEM ECE) 1. For the signal shown in Fig. 1, find x(2t + 3). i. Fig. 1 2. What is the classification of the systems? 3. What are the Dirichlet s conditions of Fourier
Digital Signal Processing. Midterm 1 Solution
 EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
EE 123 University of California, Berkeley Anant Sahai February 15, 27 Digital Signal Processing Instructions Midterm 1 Solution Total time allowed for the exam is 8 minutes Some useful formulas: Discrete
Cosc 3451 Signals and Systems. What is a system? Systems Terminology and Properties of Systems
 Cosc 3451 Signals and Systems Systems Terminology and Properties of Systems What is a system? an entity that manipulates one or more signals to yield new signals (often to accomplish a function) can be
Cosc 3451 Signals and Systems Systems Terminology and Properties of Systems What is a system? an entity that manipulates one or more signals to yield new signals (often to accomplish a function) can be
Linear Systems. ! Textbook: Strum, Contemporary Linear Systems using MATLAB.
 Linear Systems LS 1! Textbook: Strum, Contemporary Linear Systems using MATLAB.! Contents 1. Basic Concepts 2. Continuous Systems a. Laplace Transforms and Applications b. Frequency Response of Continuous
Linear Systems LS 1! Textbook: Strum, Contemporary Linear Systems using MATLAB.! Contents 1. Basic Concepts 2. Continuous Systems a. Laplace Transforms and Applications b. Frequency Response of Continuous
Signals and Systems Chapter 2
 Signals and Systems Chapter 2 Continuous-Time Systems Prof. Yasser Mostafa Kadah Overview of Chapter 2 Systems and their classification Linear time-invariant systems System Concept Mathematical transformation
Signals and Systems Chapter 2 Continuous-Time Systems Prof. Yasser Mostafa Kadah Overview of Chapter 2 Systems and their classification Linear time-invariant systems System Concept Mathematical transformation
Digital Signal Processing Lecture 4
 Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Remote Sensing Laboratory Dept. of Information Engineering and Computer Science University of Trento Via Sommarive, 14, I-38123 Povo, Trento, Italy Digital Signal Processing Lecture 4 Begüm Demir E-mail:
Introduction to DSP Time Domain Representation of Signals and Systems
 Introduction to DSP Time Domain Representation of Signals and Systems Dr. Waleed Al-Hanafy waleed alhanafy@yahoo.com Faculty of Electronic Engineering, Menoufia Univ., Egypt Digital Signal Processing (ECE407)
Introduction to DSP Time Domain Representation of Signals and Systems Dr. Waleed Al-Hanafy waleed alhanafy@yahoo.com Faculty of Electronic Engineering, Menoufia Univ., Egypt Digital Signal Processing (ECE407)
The Continuous Time Fourier Transform
 COMM 401: Signals & Systems Theory Lecture 8 The Continuous Time Fourier Transform Fourier Transform Continuous time CT signals Discrete time DT signals Aperiodic signals nonperiodic periodic signals Aperiodic
COMM 401: Signals & Systems Theory Lecture 8 The Continuous Time Fourier Transform Fourier Transform Continuous time CT signals Discrete time DT signals Aperiodic signals nonperiodic periodic signals Aperiodic
(t ) a 1. (t ).x 1..y 1
 a 1. (t ).x 1..y 1") Introduction to the convolution Experiment # 4 LTI S ystems & Convolution Amongst the concepts that cause the most confusion to electrical engineering students, the Convolution Integral stands as a repeat
Introduction to the convolution Experiment # 4 LTI S ystems & Convolution Amongst the concepts that cause the most confusion to electrical engineering students, the Convolution Integral stands as a repeat
3.2 Complex Sinusoids and Frequency Response of LTI Systems
 3. Introduction. A signal can be represented as a weighted superposition of complex sinusoids. x(t) or x[n]. LTI system: LTI System Output = A weighted superposition of the system response to each complex
3. Introduction. A signal can be represented as a weighted superposition of complex sinusoids. x(t) or x[n]. LTI system: LTI System Output = A weighted superposition of the system response to each complex
Frequency Response (III) Lecture 26:
 Lecture 26:") EECS 20 N March 21, 2001 Lecture 26: Frequency Response (III) Laurent El Ghaoui 1 outline reading assignment: Chapter 8 of Lee and Varaiya we ll concentrate on continuous-time systems: convolution integral
EECS 20 N March 21, 2001 Lecture 26: Frequency Response (III) Laurent El Ghaoui 1 outline reading assignment: Chapter 8 of Lee and Varaiya we ll concentrate on continuous-time systems: convolution integral
Lecture V: Linear difference and differential equations
 Lecture V: Linear difference and differential equations BME 171: Signals and Systems Duke University September 10, 2008 This lecture Plan for the lecture: 1 Discrete-time systems linear difference equations
Lecture V: Linear difference and differential equations BME 171: Signals and Systems Duke University September 10, 2008 This lecture Plan for the lecture: 1 Discrete-time systems linear difference equations
Problem Value
 GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 30-Apr-04 COURSE: ECE-2025 NAME: GT #: LAST, FIRST Recitation Section: Circle the date & time when your Recitation
GEORGIA INSTITUTE OF TECHNOLOGY SCHOOL of ELECTRICAL & COMPUTER ENGINEERING FINAL EXAM DATE: 30-Apr-04 COURSE: ECE-2025 NAME: GT #: LAST, FIRST Recitation Section: Circle the date & time when your Recitation
Discrete-Time Systems
 FIR Filters With this chapter we turn to systems as opposed to signals. The systems discussed in this chapter are finite impulse response (FIR) digital filters. The term digital filter arises because these
FIR Filters With this chapter we turn to systems as opposed to signals. The systems discussed in this chapter are finite impulse response (FIR) digital filters. The term digital filter arises because these
The Johns Hopkins University Department of Electrical and Computer Engineering Introduction to Linear Systems Fall 2002.
 The Johns Hopkins University Department of Electrical and Computer Engineering 505.460 Introduction to Linear Systems Fall 2002 Final exam Name: You are allowed to use: 1. Table 3.1 (page 206) & Table
The Johns Hopkins University Department of Electrical and Computer Engineering 505.460 Introduction to Linear Systems Fall 2002 Final exam Name: You are allowed to use: 1. Table 3.1 (page 206) & Table
UNIT-II Z-TRANSFORM. This expression is also called a one sided z-transform. This non causal sequence produces positive powers of z in X (z).
.") Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Page no: 1 UNIT-II Z-TRANSFORM The Z-Transform The direct -transform, properties of the -transform, rational -transforms, inversion of the transform, analysis of linear time-invariant systems in the -
Analog Signals and Systems and their properties
 Analog Signals and Systems and their properties Main Course Objective: Recall course objectives Understand the fundamentals of systems/signals interaction (know how systems can transform or filter signals)
Analog Signals and Systems and their properties Main Course Objective: Recall course objectives Understand the fundamentals of systems/signals interaction (know how systems can transform or filter signals)
Examples. 2-input, 1-output discrete-time systems: 1-input, 1-output discrete-time systems:
 Discrete-Time s - I Time-Domain Representation CHAPTER 4 These lecture slides are based on "Digital Signal Processing: A Computer-Based Approach, 4th ed." textbook by S.K. Mitra and its instructor materials.
Discrete-Time s - I Time-Domain Representation CHAPTER 4 These lecture slides are based on "Digital Signal Processing: A Computer-Based Approach, 4th ed." textbook by S.K. Mitra and its instructor materials.
2.161 Signal Processing: Continuous and Discrete Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu.6 Signal Processing: Continuous and Discrete Fall 008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
MIT OpenCourseWare http://ocw.mit.edu.6 Signal Processing: Continuous and Discrete Fall 008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. MASSACHUSETTS
Chap 4. State-Space Solutions and
 Chap 4. State-Space Solutions and Realizations Outlines 1. Introduction 2. Solution of LTI State Equation 3. Equivalent State Equations 4. Realizations 5. Solution of Linear Time-Varying (LTV) Equations
Chap 4. State-Space Solutions and Realizations Outlines 1. Introduction 2. Solution of LTI State Equation 3. Equivalent State Equations 4. Realizations 5. Solution of Linear Time-Varying (LTV) Equations
Differential and Difference LTI systems
 Signals and Systems Lecture: 6 Differential and Difference LTI systems Differential and difference linear time-invariant (LTI) systems constitute an extremely important class of systems in engineering.
Signals and Systems Lecture: 6 Differential and Difference LTI systems Differential and difference linear time-invariant (LTI) systems constitute an extremely important class of systems in engineering.
CH.3 Continuous-Time Linear Time-Invariant System
 CH.3 Continuous-Time Linear Time-Invariant System 1 LTI System Characterization 1.1 what does LTI mean? In Ch.2, the properties of the system are investigated. We are particularly interested in linear
CH.3 Continuous-Time Linear Time-Invariant System 1 LTI System Characterization 1.1 what does LTI mean? In Ch.2, the properties of the system are investigated. We are particularly interested in linear
Professor Fearing EECS120/Problem Set 2 v 1.01 Fall 2016 Due at 4 pm, Fri. Sep. 9 in HW box under stairs (1st floor Cory) Reading: O&W Ch 1, Ch2.
 Reading: O&W Ch 1, Ch2.") Professor Fearing EECS120/Problem Set 2 v 1.01 Fall 20 Due at 4 pm, Fri. Sep. 9 in HW box under stairs (1st floor Cory) Reading: O&W Ch 1, Ch2. Note: Π(t) = u(t + 1) u(t 1 ), and r(t) = tu(t) where u(t)
Professor Fearing EECS120/Problem Set 2 v 1.01 Fall 20 Due at 4 pm, Fri. Sep. 9 in HW box under stairs (1st floor Cory) Reading: O&W Ch 1, Ch2. Note: Π(t) = u(t + 1) u(t 1 ), and r(t) = tu(t) where u(t)
Computing inverse Laplace Transforms.
 Review Exam 3. Sections 4.-4.5 in Lecture Notes. 60 minutes. 7 problems. 70 grade attempts. (0 attempts per problem. No partial grading. (Exceptions allowed, ask you TA. Integration table included. Complete
Review Exam 3. Sections 4.-4.5 in Lecture Notes. 60 minutes. 7 problems. 70 grade attempts. (0 attempts per problem. No partial grading. (Exceptions allowed, ask you TA. Integration table included. Complete
EC Signals and Systems
 UNIT I CLASSIFICATION OF SIGNALS AND SYSTEMS Continuous time signals (CT signals), discrete time signals (DT signals) Step, Ramp, Pulse, Impulse, Exponential 1. Define Unit Impulse Signal [M/J 1], [M/J
UNIT I CLASSIFICATION OF SIGNALS AND SYSTEMS Continuous time signals (CT signals), discrete time signals (DT signals) Step, Ramp, Pulse, Impulse, Exponential 1. Define Unit Impulse Signal [M/J 1], [M/J
Review of Frequency Domain Fourier Series: Continuous periodic frequency components
 Today we will review: Review of Frequency Domain Fourier series why we use it trig form & exponential form how to get coefficients for each form Eigenfunctions what they are how they relate to LTI systems
Today we will review: Review of Frequency Domain Fourier series why we use it trig form & exponential form how to get coefficients for each form Eigenfunctions what they are how they relate to LTI systems
Lecture 2. Introduction to Systems (Lathi )
") Lecture 2 Introduction to Systems (Lathi 1.6-1.8) Pier Luigi Dragotti Department of Electrical & Electronic Engineering Imperial College London URL: www.commsp.ee.ic.ac.uk/~pld/teaching/ E-mail: p.dragotti@imperial.ac.uk
Lecture 2 Introduction to Systems (Lathi 1.6-1.8) Pier Luigi Dragotti Department of Electrical & Electronic Engineering Imperial College London URL: www.commsp.ee.ic.ac.uk/~pld/teaching/ E-mail: p.dragotti@imperial.ac.uk
S&S S&S S&S. Signals and Systems (18-396) Spring Semester, Department of Electrical and Computer Engineering
 Spring Semester, Department of Electrical and Computer Engineering") S&S S&S S&S Signals Systems (-96) Spring Semester, 2009 Department of Electrical Computer Engineering SOLUTION OF DIFFERENTIAL AND DIFFERENCE EQUATIONS Note: These notes summarize the comments from the
S&S S&S S&S Signals Systems (-96) Spring Semester, 2009 Department of Electrical Computer Engineering SOLUTION OF DIFFERENTIAL AND DIFFERENCE EQUATIONS Note: These notes summarize the comments from the
DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2010
 [E2.5] IMPERIAL COLLEGE LONDON DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2010 EEE/ISE PART II MEng. BEng and ACGI SIGNALS AND LINEAR SYSTEMS Time allowed: 2:00 hours There are FOUR
[E2.5] IMPERIAL COLLEGE LONDON DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2010 EEE/ISE PART II MEng. BEng and ACGI SIGNALS AND LINEAR SYSTEMS Time allowed: 2:00 hours There are FOUR
ECE 301 Division 1 Final Exam Solutions, 12/12/2011, 3:20-5:20pm in PHYS 114.
 ECE 301 Division 1 Final Exam Solutions, 12/12/2011, 3:20-5:20pm in PHYS 114. The exam for both sections of ECE 301 is conducted in the same room, but the problems are completely different. Your ID will
ECE 301 Division 1 Final Exam Solutions, 12/12/2011, 3:20-5:20pm in PHYS 114. The exam for both sections of ECE 301 is conducted in the same room, but the problems are completely different. Your ID will
EE361: Signals and System II
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE361: Signals and System II Introduction http://www.ee.unlv.edu/~b1morris/ee361/ 2 Class Website http://www.ee.unlv.edu/~b1morris/ee361/ This
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu EE361: Signals and System II Introduction http://www.ee.unlv.edu/~b1morris/ee361/ 2 Class Website http://www.ee.unlv.edu/~b1morris/ee361/ This
Discrete-time signals and systems
 Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
Discrete-time signals and systems 1 DISCRETE-TIME DYNAMICAL SYSTEMS x(t) G y(t) Linear system: Output y(n) is a linear function of the inputs sequence: y(n) = k= h(k)x(n k) h(k): impulse response of the
EECS20n, Solution to Mock Midterm 2, 11/17/00
 EECS20n, Solution to Mock Midterm 2, /7/00. 5 points Write the following in Cartesian coordinates (i.e. in the form x + jy) (a) point j 3 j 2 + j =0 (b) 2 points k=0 e jkπ/6 = ej2π/6 =0 e jπ/6 (c) 2 points(
EECS20n, Solution to Mock Midterm 2, /7/00. 5 points Write the following in Cartesian coordinates (i.e. in the form x + jy) (a) point j 3 j 2 + j =0 (b) 2 points k=0 e jkπ/6 = ej2π/6 =0 e jπ/6 (c) 2 points(
Lecture 6: Time-Domain Analysis of Continuous-Time Systems Dr.-Ing. Sudchai Boonto
 Lecture 6: Time-Domain Analysis of Continuous-Time Systems Dr-Ing Sudchai Boonto Department of Control System and Instrumentation Engineering King Mongkut s Unniversity of Technology Thonburi Thailand
Lecture 6: Time-Domain Analysis of Continuous-Time Systems Dr-Ing Sudchai Boonto Department of Control System and Instrumentation Engineering King Mongkut s Unniversity of Technology Thonburi Thailand
Lecture 1: Pragmatic Introduction to Stochastic Differential Equations
 Lecture 1: Pragmatic Introduction to Stochastic Differential Equations Simo Särkkä Aalto University, Finland (visiting at Oxford University, UK) November 13, 2013 Simo Särkkä (Aalto) Lecture 1: Pragmatic
Lecture 1: Pragmatic Introduction to Stochastic Differential Equations Simo Särkkä Aalto University, Finland (visiting at Oxford University, UK) November 13, 2013 Simo Särkkä (Aalto) Lecture 1: Pragmatic
Introduction to DFT. Deployment of Telecommunication Infrastructures. Azadeh Faridi DTIC UPF, Spring 2009
 Introduction to DFT Deployment of Telecommunication Infrastructures Azadeh Faridi DTIC UPF, Spring 2009 1 Review of Fourier Transform Many signals can be represented by a fourier integral of the following
Introduction to DFT Deployment of Telecommunication Infrastructures Azadeh Faridi DTIC UPF, Spring 2009 1 Review of Fourier Transform Many signals can be represented by a fourier integral of the following
CLTI System Response (4A) Young Won Lim 4/11/15
 Young Won Lim 4/11/15") CLTI System Response (4A) Copyright (c) 2011-2015 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2
CLTI System Response (4A) Copyright (c) 2011-2015 Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version 1.2
NAME: ht () 1 2π. Hj0 ( ) dω Find the value of BW for the system having the following impulse response.
 1 2π. Hj0 ( ) dω Find the value of BW for the system having the following impulse response.") University of California at Berkeley Department of Electrical Engineering and Computer Sciences Professor J. M. Kahn, EECS 120, Fall 1998 Final Examination, Wednesday, December 16, 1998, 5-8 pm NAME: 1.
University of California at Berkeley Department of Electrical Engineering and Computer Sciences Professor J. M. Kahn, EECS 120, Fall 1998 Final Examination, Wednesday, December 16, 1998, 5-8 pm NAME: 1.
Solution 7 August 2015 ECE301 Signals and Systems: Final Exam. Cover Sheet
 Solution 7 August 2015 ECE301 Signals and Systems: Final Exam Cover Sheet Test Duration: 120 minutes Coverage: Chap. 1, 2, 3, 4, 5, 7 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes
Solution 7 August 2015 ECE301 Signals and Systems: Final Exam Cover Sheet Test Duration: 120 minutes Coverage: Chap. 1, 2, 3, 4, 5, 7 One 8.5" x 11" crib sheet is allowed. Calculators, textbooks, notes
EECE 3620: Linear Time-Invariant Systems: Chapter 2
 EECE 3620: Linear Time-Invariant Systems: Chapter 2 Prof. K. Chandra ECE, UMASS Lowell September 7, 2016 1 Continuous Time Systems In the context of this course, a system can represent a simple or complex
EECE 3620: Linear Time-Invariant Systems: Chapter 2 Prof. K. Chandra ECE, UMASS Lowell September 7, 2016 1 Continuous Time Systems In the context of this course, a system can represent a simple or complex
Chapter 7: The z-transform
 Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.
Chapter 7: The -Transform ECE352 1 The -Transform - definition Continuous-time systems: e st H(s) y(t) = e st H(s) e st is an eigenfunction of the LTI system h(t), and H(s) is the corresponding eigenvalue.