ECE295, Data Assimila0on and Inverse Problems, Spring 2015
|
|
|
- Rhoda Perry
- 5 years ago
- Views:
Transcription
1 ECE295, Data Assimila0on and Inverse Problems, Spring 2015 Peter Gersto), , We meet Wednesday from 5 to 6:20pm in HHS 2305A Text for first 5 classes: Parameter EsGmaGon and Inverse Problems (2nd EdiGon) here under UCSD license Grading S Classes 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1, 2) 8 April, SVD (Aster ch 2 and 3) 15 April, RegularizaGon (ch 4) Numerical Example: Beamforming 22 April, Sparse methods (ch ) 29 April, Sparse methods 6 May, Bayesian methods and Monte Carlo methods (ch 11) Numerical Example: Ice flow from GPS 13 May, IntroducGon to sequengal Bayesian methods, Kalman Filter 20 May, Data assimilagon, EnKF 27 May, EnKF, Data assimilagon 3 June, Markov Chain Monte Carlo, PF Homework: You can use any programming language, matlab is the most obvious, Just the code to me (I dont need anything else). Call the files LastName_Ex. Homework is due 8am on Wednesday. That way we can discuss in class. Hw 1: Download the matlab codes for the book (cd_5.3). Run the 3 examples for chapter 2. Come to class with one quesgon about the examples. Due 8 April.


2 Inverse problems are everywhere When data only indirectly constrain quantities of interest 2
3 Thinking backwards Most people, if you describe a train of events to them will tell you what the result will be. There are few people, however that if you told them a result, would be able to evolve from their own inner consciousness what the steps were that led to that result. This power is what I mean when I talk of reasoning backward. Sherlock Holmes, A Study in Scarlet, Sir Arthur Conan Doyle (1887) 3
4 Reversing a forward problem 4
5 Anatomy of an inverse problem Hunting for gold at the beach with a gravimeter Gravimeter? Courtesy Heiner Igel 5
6 Forward modelling example: Treasure Hunt We have observed some values: 10, 23, 35, 45, 56 µ gals How can we relate the observed gravity values to the subsurface properties? Gravimeter? We know how to do the forward problem: ( ') ( r ) Gρ r Φ = dv ' r r' This equation relates the (observed) gravitational potential to the subsurface density. -> given a density model we can predict the gravity field at the surface! 6
7 Treasure Hunt: Trial and error What else do we know? Density sand: 2.2 g/cm 3 Density gold: 19.3 g/cm 3 Do we know these values exactly? Where is the box with gold? Gravimeter? One approach is trial and (t)error forward modelling Use the forward solution to calculate many models for a rectangular box situated somewhere in the ground and compare the theoretical (synthetic) data to the observations. 7
8 Treasure Hunt: model space But we have to define plausible models for the beach. We have to somehow describe the model geometrically. We introduce simplifying approximations Gravimeter? - divide the subsurface into rectangles with variable density - Let us assume a flat surface x x x x x surface gold sand 8
9 Treasure Hunt: Non- uniqueness Could we compute all possible models and compare the synthetic data with the observations? - at every rectangle two possibilities (sand or gold) ~ possible models Gravimeter (Age of universe ~10 17 s) Too many models! - We have possible models but only 5 observations! - It is likely that two or more models will fit the data (maybe exactly) Non-uniqueness is likely 9
10 Treasure hunt: a priori informagon Is there anything we know about the treasure? How large is the box? Is it still intact? Has it possibly disintegrated? What was the shape of the box? Gravimeter This is called a priori (or prior) information. It will allow us to define plausible, possible, and unlikely models: plausible possible unlikely 10
11 Treasure hunt: data uncertainges Things to consider in formulating the inverse problem Do we have errors in the data? Did the instruments work correctly? Do we have to correct for anything? (e.g. topography, tides,...) Gravimeter Are we using the right theory? Is a 2-D approximation adequate? Are there other materials present other than gold and sand? Are there adjacent masses which could influence observations? Answering these questions often requires introducing more simplifying assumptions and guesses. All inferences are dependent on these assumptions. (GIGO) 11
12 Treasure Hunt: solugons Models with less than 2% error. 12

13 Treasure Hunt: solugons Models with less than 1% error. 13
14 What we have learned from one example Inverse problems = inference about physical systems from data Gravimeter - Data usually contain errors (data uncertainties) - Physical theories require approximations - Infinitely many models will fit the data (non-uniqueness) - Our physical theory may be inaccurate (theoretical uncertainties) - Our forward problem may be highly nonlinear - We always have a finite amount of data Detailed questions are: How accurate are our data? How well can we solve the forward problem? What independent information do we have on the model space (a priori information)? 14
15 EsGmaGon and Appraisal 15
16 Ocean circulagon SequenGal inverse problems Observe temperature, current flow, acousgc travelgmes PredicGct ocean circulagon Numerical Weather PredicGon EvoluGon of an earthquake EvoluGon of a oilfield EvoluGon of a stock market Structural monitoring Tracking an airplane

 -15 60 40 20")
17 ICE flow 40 RS07 RS08 Lat (meters) Lon (meters) Elevation (meters)
18 Data assimilagon Data assimila0on is the process by which observagons are incorporated into a computer model of a real system. ApplicaGons of data assimilagon arise in many fields of geosciences, perhaps most importantly in weather forecasgng and hydrology. Data assimilagon proceeds by analysis cycles. In each analysis cycle, observagons of the current (and possibly past) state of a system are combined with the results from a numerical model (the forecast) to produce an analysis, which is considered as 'the best' esgmate of the current state of the system. This is called the analysis step. EssenGally, the analysis step tries to balance the uncertainty in the data and in the forecast. The model is then advanced in Gme and its result becomes the forecast in the next analysis cycle.
19
20


21 FormulaGng inverse problems Regression What are d, m and G? Discrete or continuous? Linear or nonlinear? Why? What are the data? What are the model parameters? Unique or non-unique solution? y = a + bx 21



22 FormulaGng inverse problems Ballistic trajectory What are d, m and G? Discrete or continuous? Linear or nonlinear? Why? What are the data? What are the model parameters? Unique or non-unique solution? 22
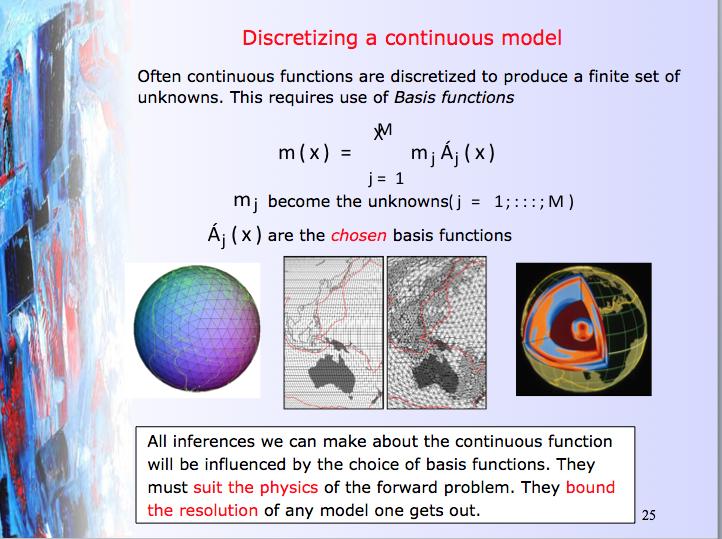
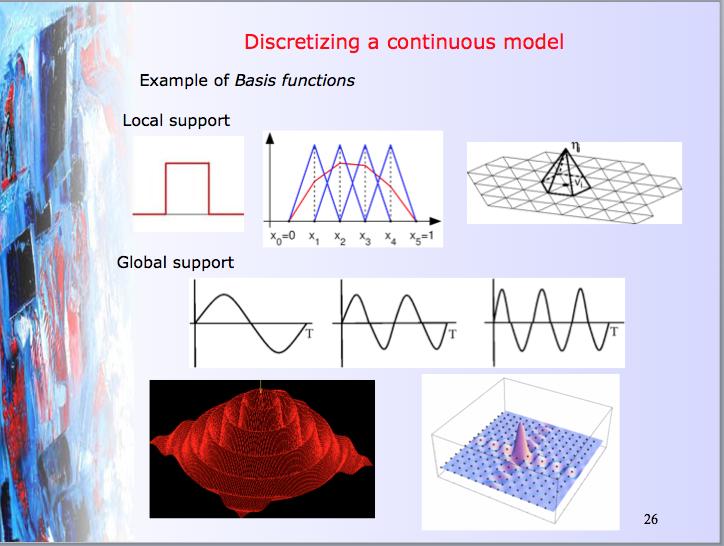
23 Recap: Characterizing inverse problems Inverse problems can be congnuous or discrete ConGnuous problems are o)en discregzed by choosing a set of basis funcgons and projecgng the congnuous funcgon on them. The forward problem is to take a model and predict observables that are compared to actual data. Contains the Physics of the problem. This o)en involves a mathemagcal model which is an approximagon to the real physics. The inverse problem is to take the data and constrain the model in some way. We may want to build a model or we may wish to ask a less precise quesgon of the data!


 error distribution.")
24 Over-determined: Linear discrete inverse problem To find the best fit model we can minimize the prediction error of the solution But the data contain errors. Let s assume these are independent and normally distributed, then we weight each residual inversely by the standard deviation of the corresponding (known) error distribution. We can obtain a least squares solution by minimizing the weighted prediction error of the solution. 4



25 Over-determined: Linear discrete inverse problem We seek the model vector m which minimizes Compare with maximum likelihood Note that this is a quadratic function of the model vector. Solution: Differentiate with respect to m and solve for the model vector which gives a zero gradient in This gives This is the least-squares solution. A solution to the normal equations: 3 5




26 Over-determined: Linear discrete inverse problem How does the Least-squares solution compare to the standard equations of linear regression? Given N data y i with independent normally distributed errors and standard deviations i what are the expressions for the model parameters m = [a,b] T? 6
27 Linear discrete inverse problem: Least squares What happens in the under and even-determined cases? Under-determined, N=1: Matrix has a zero determinant What and a is zero m? eigenvalue an infinite number of solutions exist Even-determined, N=2: r = d Gm = 0 What is the prediction error? Prediction error is zero! 7


28 Example: Over-determined, Linear discrete inverse problem The Ballistics example Given data and noise Calculate G Is the data fit good enough? And how to errors in data propagate into the solution? 8
29 The two questions in parameter estimation We have our fitted model parameters but we are far from finished! We need to: Assess the quality of the data fit. Goodness of fit: Does the model fit the data to within the statistical uncertainty of the noise? Estimate how errors in the data propagate into the model What are the errors on the model parameters? 9

30 Goodness of fit Once we have our least squares solution m LS how do we know whether the fit is good enough given the errors in the data? Use the prediction error at the least squares solution! If data errors are Gaussian this as a chi-square statistic 10
ECE295, Data Assimila0on and Inverse Problems, Spring 2015
 ECE295, Data Assimila0on and Inverse Problems, Spring 2015 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1 and 2) Slides 8 April, SVD (Aster ch 2 and 3) Slides 15 April, RegularizaFon (ch
ECE295, Data Assimila0on and Inverse Problems, Spring 2015 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1 and 2) Slides 8 April, SVD (Aster ch 2 and 3) Slides 15 April, RegularizaFon (ch
ECE295, Data Assimila0on and Inverse Problems, Spring 2015
 ECE295, Data Assimila0on and Inverse Problems, Spring 2015 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1 and 2) Slides 8 April, SVD (Aster ch 2 and 3) Slides 15 April, RegularizaFon (ch
ECE295, Data Assimila0on and Inverse Problems, Spring 2015 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1 and 2) Slides 8 April, SVD (Aster ch 2 and 3) Slides 15 April, RegularizaFon (ch
ECE295, Data Assimilation and Inverse Problems, Spring 2015
 ECE295, Data Assimilation and Inverse Problems, Spring 2015 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1 and 2) Slides 8 April, SVD (Aster ch 2 and 3) Slides 15 April, Regularization (ch
ECE295, Data Assimilation and Inverse Problems, Spring 2015 1 April, Intro; Linear discrete Inverse problems (Aster Ch 1 and 2) Slides 8 April, SVD (Aster ch 2 and 3) Slides 15 April, Regularization (ch
ECE285/SIO209, Machine learning for physical applications, Spring 2017
 ECE285/SIO209, Machine learning for physical applications, Spring 2017 Peter Gerstoft, 534-7768, gerstoft@ucsd.edu We meet Wednesday from 5 to 6:20pm in Spies Hall 330 Text Bishop Grading A or maybe S
ECE285/SIO209, Machine learning for physical applications, Spring 2017 Peter Gerstoft, 534-7768, gerstoft@ucsd.edu We meet Wednesday from 5 to 6:20pm in Spies Hall 330 Text Bishop Grading A or maybe S
Miscellaneous. Regarding reading materials. Again, ask questions (if you have) and ask them earlier
 and ask them earlier") Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
Miscellaneous Regarding reading materials Reading materials will be provided as needed If no assigned reading, it means I think the material from class is sufficient Should be enough for you to do your
STA 4273H: Sta-s-cal Machine Learning
 STA 4273H: Sta-s-cal Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 2 In our
STA 4273H: Sta-s-cal Machine Learning Russ Salakhutdinov Department of Computer Science! Department of Statistical Sciences! rsalakhu@cs.toronto.edu! h0p://www.cs.utoronto.ca/~rsalakhu/ Lecture 2 In our
Approximate Inference
 Approximate Inference Simulation has a name: sampling Sampling is a hot topic in machine learning, and it s really simple Basic idea: Draw N samples from a sampling distribution S Compute an approximate
Approximate Inference Simulation has a name: sampling Sampling is a hot topic in machine learning, and it s really simple Basic idea: Draw N samples from a sampling distribution S Compute an approximate
Mathematical Tools for Neuroscience (NEU 314) Princeton University, Spring 2016 Jonathan Pillow. Homework 8: Logistic Regression & Information Theory
 Princeton University, Spring 2016 Jonathan Pillow. Homework 8: Logistic Regression & Information Theory") Mathematical Tools for Neuroscience (NEU 34) Princeton University, Spring 206 Jonathan Pillow Homework 8: Logistic Regression & Information Theory Due: Tuesday, April 26, 9:59am Optimization Toolbox One
Mathematical Tools for Neuroscience (NEU 34) Princeton University, Spring 206 Jonathan Pillow Homework 8: Logistic Regression & Information Theory Due: Tuesday, April 26, 9:59am Optimization Toolbox One
Parallel Particle Filter in Julia
 Parallel Particle Filter in Julia Gustavo Goretkin December 12, 2011 1 / 27 First a disclaimer The project in a sentence. workings 2 / 27 First a disclaimer First a disclaimer The project in a sentence.
Parallel Particle Filter in Julia Gustavo Goretkin December 12, 2011 1 / 27 First a disclaimer The project in a sentence. workings 2 / 27 First a disclaimer First a disclaimer The project in a sentence.
GAUSSIAN PROCESS REGRESSION
 GAUSSIAN PROCESS REGRESSION CSE 515T Spring 2015 1. BACKGROUND The kernel trick again... The Kernel Trick Consider again the linear regression model: y(x) = φ(x) w + ε, with prior p(w) = N (w; 0, Σ). The
GAUSSIAN PROCESS REGRESSION CSE 515T Spring 2015 1. BACKGROUND The kernel trick again... The Kernel Trick Consider again the linear regression model: y(x) = φ(x) w + ε, with prior p(w) = N (w; 0, Σ). The
Machine Learning for OR & FE
 Machine Learning for OR & FE Hidden Markov Models Martin Haugh Department of Industrial Engineering and Operations Research Columbia University Email: martin.b.haugh@gmail.com Additional References: David
Machine Learning for OR & FE Hidden Markov Models Martin Haugh Department of Industrial Engineering and Operations Research Columbia University Email: martin.b.haugh@gmail.com Additional References: David
Why do we care? Measurements. Handling uncertainty over time: predicting, estimating, recognizing, learning. Dealing with time
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 2004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
Forward Problems and their Inverse Solutions
 Forward Problems and their Inverse Solutions Sarah Zedler 1,2 1 King Abdullah University of Science and Technology 2 University of Texas at Austin February, 2013 Outline 1 Forward Problem Example Weather
Forward Problems and their Inverse Solutions Sarah Zedler 1,2 1 King Abdullah University of Science and Technology 2 University of Texas at Austin February, 2013 Outline 1 Forward Problem Example Weather
UVA CS 6316/4501 Fall 2016 Machine Learning. Lecture 6: Linear Regression Model with RegularizaEons. Dr. Yanjun Qi. University of Virginia
 UVA CS 6316/4501 Fall 2016 Machine Learning Lecture 6: Linear Regression Model with RegularizaEons Dr. Yanjun Qi University of Virginia Department of Computer Science 1 Where are we? è Five major secgons
UVA CS 6316/4501 Fall 2016 Machine Learning Lecture 6: Linear Regression Model with RegularizaEons Dr. Yanjun Qi University of Virginia Department of Computer Science 1 Where are we? è Five major secgons
STA414/2104 Statistical Methods for Machine Learning II
 STA414/2104 Statistical Methods for Machine Learning II Murat A. Erdogdu & David Duvenaud Department of Computer Science Department of Statistical Sciences Lecture 3 Slide credits: Russ Salakhutdinov Announcements
STA414/2104 Statistical Methods for Machine Learning II Murat A. Erdogdu & David Duvenaud Department of Computer Science Department of Statistical Sciences Lecture 3 Slide credits: Russ Salakhutdinov Announcements
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Intro to Linear & Nonlinear Optimization
 ECE 174 Intro to Linear & Nonlinear Optimization i Ken Kreutz-Delgado ECE Department, UCSD Contact Information Course Website Accessible from http://dsp.ucsd.edu/~kreutz Instructor Ken Kreutz-Delgado kreutz@ece.ucsd.eduucsd
ECE 174 Intro to Linear & Nonlinear Optimization i Ken Kreutz-Delgado ECE Department, UCSD Contact Information Course Website Accessible from http://dsp.ucsd.edu/~kreutz Instructor Ken Kreutz-Delgado kreutz@ece.ucsd.eduucsd
Par$cle Filters Part I: Theory. Peter Jan van Leeuwen Data- Assimila$on Research Centre DARC University of Reading
 Par$cle Filters Part I: Theory Peter Jan van Leeuwen Data- Assimila$on Research Centre DARC University of Reading Reading July 2013 Why Data Assimila$on Predic$on Model improvement: - Parameter es$ma$on
Par$cle Filters Part I: Theory Peter Jan van Leeuwen Data- Assimila$on Research Centre DARC University of Reading Reading July 2013 Why Data Assimila$on Predic$on Model improvement: - Parameter es$ma$on
The Inversion Problem: solving parameters inversion and assimilation problems
 The Inversion Problem: solving parameters inversion and assimilation problems UE Numerical Methods Workshop Romain Brossier romain.brossier@univ-grenoble-alpes.fr ISTerre, Univ. Grenoble Alpes Master 08/09/2016
The Inversion Problem: solving parameters inversion and assimilation problems UE Numerical Methods Workshop Romain Brossier romain.brossier@univ-grenoble-alpes.fr ISTerre, Univ. Grenoble Alpes Master 08/09/2016
Announcements. CS 188: Artificial Intelligence Fall VPI Example. VPI Properties. Reasoning over Time. Markov Models. Lecture 19: HMMs 11/4/2008
 CS 88: Artificial Intelligence Fall 28 Lecture 9: HMMs /4/28 Announcements Midterm solutions up, submit regrade requests within a week Midterm course evaluation up on web, please fill out! Dan Klein UC
CS 88: Artificial Intelligence Fall 28 Lecture 9: HMMs /4/28 Announcements Midterm solutions up, submit regrade requests within a week Midterm course evaluation up on web, please fill out! Dan Klein UC
CSC2515 Assignment #2
 CSC2515 Assignment #2 Due: Nov.4, 2pm at the START of class Worth: 18% Late assignments not accepted. 1 Pseudo-Bayesian Linear Regression (3%) In this question you will dabble in Bayesian statistics and
CSC2515 Assignment #2 Due: Nov.4, 2pm at the START of class Worth: 18% Late assignments not accepted. 1 Pseudo-Bayesian Linear Regression (3%) In this question you will dabble in Bayesian statistics and
Signal Modeling, Statistical Inference and Data Mining in Astrophysics
 ASTRONOMY 6523 Spring 2013 Signal Modeling, Statistical Inference and Data Mining in Astrophysics Course Approach The philosophy of the course reflects that of the instructor, who takes a dualistic view
ASTRONOMY 6523 Spring 2013 Signal Modeling, Statistical Inference and Data Mining in Astrophysics Course Approach The philosophy of the course reflects that of the instructor, who takes a dualistic view
CS491/691: Introduction to Aerial Robotics
 CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
CS491/691: Introduction to Aerial Robotics Topic: State Estimation Dr. Kostas Alexis (CSE) World state (or system state) Belief state: Our belief/estimate of the world state World state: Real state of
Physics 2BL: Experiments in Mechanics and Electricity Summer Session I, 2012
 Physics BL: Experiments in Mechanics and Electricity Summer Session I, 01 Instructor: E-mail: Office: Office Hours: Phone: Tera (Bell) Austrum tbell@physics.ucsd.edu 164 Mayer Hall Addition TuTh 6-7 pm
Physics BL: Experiments in Mechanics and Electricity Summer Session I, 01 Instructor: E-mail: Office: Office Hours: Phone: Tera (Bell) Austrum tbell@physics.ucsd.edu 164 Mayer Hall Addition TuTh 6-7 pm
Announcements. CS 188: Artificial Intelligence Fall Markov Models. Example: Markov Chain. Mini-Forward Algorithm. Example
 CS 88: Artificial Intelligence Fall 29 Lecture 9: Hidden Markov Models /3/29 Announcements Written 3 is up! Due on /2 (i.e. under two weeks) Project 4 up very soon! Due on /9 (i.e. a little over two weeks)
CS 88: Artificial Intelligence Fall 29 Lecture 9: Hidden Markov Models /3/29 Announcements Written 3 is up! Due on /2 (i.e. under two weeks) Project 4 up very soon! Due on /9 (i.e. a little over two weeks)
MAT 211, Spring 2015, Introduction to Linear Algebra.
 MAT 211, Spring 2015, Introduction to Linear Algebra. Lecture 04, 53103: MWF 10-10:53 AM. Location: Library W4535 Contact: mtehrani@scgp.stonybrook.edu Final Exam: Monday 5/18/15 8:00 AM-10:45 AM The aim
MAT 211, Spring 2015, Introduction to Linear Algebra. Lecture 04, 53103: MWF 10-10:53 AM. Location: Library W4535 Contact: mtehrani@scgp.stonybrook.edu Final Exam: Monday 5/18/15 8:00 AM-10:45 AM The aim
Homework 4 will be posted tonight, due Wednesday, May 8.
 Multiscale Computing and Escape Problems Friday, April 26, 2013 2:01 PM Homework 4 will be posted tonight, due Wednesday, May 8. Multiscale computation is a way to use the ideas of asymptotic reductions
Multiscale Computing and Escape Problems Friday, April 26, 2013 2:01 PM Homework 4 will be posted tonight, due Wednesday, May 8. Multiscale computation is a way to use the ideas of asymptotic reductions
MITOCW watch?v=dztkqqy2jn4
 MITOCW watch?v=dztkqqy2jn4 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources for free. To
MITOCW watch?v=dztkqqy2jn4 The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources for free. To
6. Wiener and Kalman Filters
 6. Wiener and Kalman Filters 8 3 6.1. The Wiener Filter. The theory of filtering of stationary time series for a variety of purposes was constructed by Norbert Wiener in the 1940s for continuous time processes
6. Wiener and Kalman Filters 8 3 6.1. The Wiener Filter. The theory of filtering of stationary time series for a variety of purposes was constructed by Norbert Wiener in the 1940s for continuous time processes
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
SIO223A A Brief Introduction to Geophysical Modeling and Inverse Theory.
 SIO223A A Brief Introduction to Geophysical Modeling and Inverse Theory. Forward modeling: data model space space ˆd = f(x, m) m =(m 1,m 2,..., m N ) x =(x 1,x 2,x 3,..., x km ) ˆd =(ˆd 1, ˆd 2, ˆd 3,...,
SIO223A A Brief Introduction to Geophysical Modeling and Inverse Theory. Forward modeling: data model space space ˆd = f(x, m) m =(m 1,m 2,..., m N ) x =(x 1,x 2,x 3,..., x km ) ˆd =(ˆd 1, ˆd 2, ˆd 3,...,
Hidden Markov Models. Vibhav Gogate The University of Texas at Dallas
 Hidden Markov Models Vibhav Gogate The University of Texas at Dallas Intro to AI (CS 4365) Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell or Andrew Moore 1
Hidden Markov Models Vibhav Gogate The University of Texas at Dallas Intro to AI (CS 4365) Many slides over the course adapted from either Dan Klein, Luke Zettlemoyer, Stuart Russell or Andrew Moore 1
Gaussian Process Approximations of Stochastic Differential Equations
 Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Centre for Computational Statistics and Machine Learning University College London c.archambeau@cs.ucl.ac.uk CSML
Gaussian Process Approximations of Stochastic Differential Equations Cédric Archambeau Centre for Computational Statistics and Machine Learning University College London c.archambeau@cs.ucl.ac.uk CSML
Hidden Markov Models. Hal Daumé III. Computer Science University of Maryland CS 421: Introduction to Artificial Intelligence 19 Apr 2012
 Hidden Markov Models Hal Daumé III Computer Science University of Maryland me@hal3.name CS 421: Introduction to Artificial Intelligence 19 Apr 2012 Many slides courtesy of Dan Klein, Stuart Russell, or
Hidden Markov Models Hal Daumé III Computer Science University of Maryland me@hal3.name CS 421: Introduction to Artificial Intelligence 19 Apr 2012 Many slides courtesy of Dan Klein, Stuart Russell, or
= v = 2πr. = mv2 r. = v2 r. F g. a c. F c. Text: Chapter 12 Chapter 13. Chapter 13. Think and Explain: Think and Solve:
 NAME: Chapters 12, 13 & 14: Universal Gravitation Text: Chapter 12 Chapter 13 Think and Explain: Think and Explain: Think and Solve: Think and Solve: Chapter 13 Think and Explain: Think and Solve: Vocabulary:
NAME: Chapters 12, 13 & 14: Universal Gravitation Text: Chapter 12 Chapter 13 Think and Explain: Think and Explain: Think and Solve: Think and Solve: Chapter 13 Think and Explain: Think and Solve: Vocabulary:
Tools for Parameter Estimation and Propagation of Uncertainty
 Tools for Parameter Estimation and Propagation of Uncertainty Brian Borchers Department of Mathematics New Mexico Tech Socorro, NM 87801 borchers@nmt.edu Outline Models, parameters, parameter estimation,
Tools for Parameter Estimation and Propagation of Uncertainty Brian Borchers Department of Mathematics New Mexico Tech Socorro, NM 87801 borchers@nmt.edu Outline Models, parameters, parameter estimation,
Lecture 9. Time series prediction
 Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
Lecture 9 Time series prediction Prediction is about function fitting To predict we need to model There are a bewildering number of models for data we look at some of the major approaches in this lecture
Markov Models. CS 188: Artificial Intelligence Fall Example. Mini-Forward Algorithm. Stationary Distributions.
 CS 88: Artificial Intelligence Fall 27 Lecture 2: HMMs /6/27 Markov Models A Markov model is a chain-structured BN Each node is identically distributed (stationarity) Value of X at a given time is called
CS 88: Artificial Intelligence Fall 27 Lecture 2: HMMs /6/27 Markov Models A Markov model is a chain-structured BN Each node is identically distributed (stationarity) Value of X at a given time is called
CS 188: Artificial Intelligence Spring 2009
 CS 188: Artificial Intelligence Spring 2009 Lecture 21: Hidden Markov Models 4/7/2009 John DeNero UC Berkeley Slides adapted from Dan Klein Announcements Written 3 deadline extended! Posted last Friday
CS 188: Artificial Intelligence Spring 2009 Lecture 21: Hidden Markov Models 4/7/2009 John DeNero UC Berkeley Slides adapted from Dan Klein Announcements Written 3 deadline extended! Posted last Friday
Probability in Programming. Prakash Panangaden School of Computer Science McGill University
 Probability in Programming Prakash Panangaden School of Computer Science McGill University Two crucial issues Two crucial issues Correctness of software: Two crucial issues Correctness of software: with
Probability in Programming Prakash Panangaden School of Computer Science McGill University Two crucial issues Two crucial issues Correctness of software: Two crucial issues Correctness of software: with
Fitting a Straight Line to Data
 Fitting a Straight Line to Data Thanks for your patience. Finally we ll take a shot at real data! The data set in question is baryonic Tully-Fisher data from http://astroweb.cwru.edu/sparc/btfr Lelli2016a.mrt,
Fitting a Straight Line to Data Thanks for your patience. Finally we ll take a shot at real data! The data set in question is baryonic Tully-Fisher data from http://astroweb.cwru.edu/sparc/btfr Lelli2016a.mrt,
Why do we care? Examples. Bayes Rule. What room am I in? Handling uncertainty over time: predicting, estimating, recognizing, learning
 Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Handling uncertainty over time: predicting, estimating, recognizing, learning Chris Atkeson 004 Why do we care? Speech recognition makes use of dependence of words and phonemes across time. Knowing where
Gaussian Quiz. Preamble to The Humble Gaussian Distribution. David MacKay 1
 Preamble to The Humble Gaussian Distribution. David MacKay Gaussian Quiz H y y y 3. Assuming that the variables y, y, y 3 in this belief network have a joint Gaussian distribution, which of the following
Preamble to The Humble Gaussian Distribution. David MacKay Gaussian Quiz H y y y 3. Assuming that the variables y, y, y 3 in this belief network have a joint Gaussian distribution, which of the following
Gaussian Filtering Strategies for Nonlinear Systems
 Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
Gaussian Filtering Strategies for Nonlinear Systems Canonical Nonlinear Filtering Problem ~u m+1 = ~ f (~u m )+~ m+1 ~v m+1 = ~g(~u m+1 )+~ o m+1 I ~ f and ~g are nonlinear & deterministic I Noise/Errors
2D Image Processing. Bayes filter implementation: Kalman filter
 2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
2D Image Processing Bayes filter implementation: Kalman filter Prof. Didier Stricker Dr. Gabriele Bleser Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model. David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC
 Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Lagrangian Data Assimilation and Manifold Detection for a Point-Vortex Model David Darmon, AMSC Kayo Ide, AOSC, IPST, CSCAMM, ESSIC Background Data Assimilation Iterative process Forecast Analysis Background
Introduction to Machine Learning
 Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
Introduction to Machine Learning Brown University CSCI 1950-F, Spring 2012 Prof. Erik Sudderth Lecture 25: Markov Chain Monte Carlo (MCMC) Course Review and Advanced Topics Many figures courtesy Kevin
18.06 Problem Set 8 Due Wednesday, 23 April 2008 at 4 pm in
 18.06 Problem Set 8 Due Wednesday, 23 April 2008 at 4 pm in 2-106. Problem 1: Do problem 3 in section 6.5 (pg. 339) in the book. The matrix A encodes the quadratic f = x 2 + 4xy + 9y 2. Completing the
18.06 Problem Set 8 Due Wednesday, 23 April 2008 at 4 pm in 2-106. Problem 1: Do problem 3 in section 6.5 (pg. 339) in the book. The matrix A encodes the quadratic f = x 2 + 4xy + 9y 2. Completing the
When one of things that you don t know is the number of things that you don t know
 When one of things that you don t know is the number of things that you don t know Malcolm Sambridge Research School of Earth Sciences, Australian National University Canberra, Australia. Sambridge. M.,
When one of things that you don t know is the number of things that you don t know Malcolm Sambridge Research School of Earth Sciences, Australian National University Canberra, Australia. Sambridge. M.,
Intro to Linear & Nonlinear Optimization
 ECE 174 Intro to Linear & Nonlinear Optimization Ken Kreutz-Delgado ECE Department UCSD Version 10.5.2017 Contact Information Fall 2017 Course Website Accessible from http://dsp.ucsd.edu/~kreutz/; Piazza:
ECE 174 Intro to Linear & Nonlinear Optimization Ken Kreutz-Delgado ECE Department UCSD Version 10.5.2017 Contact Information Fall 2017 Course Website Accessible from http://dsp.ucsd.edu/~kreutz/; Piazza:
Kalman filtering and friends: Inference in time series models. Herke van Hoof slides mostly by Michael Rubinstein
 Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Kalman filtering and friends: Inference in time series models Herke van Hoof slides mostly by Michael Rubinstein Problem overview Goal Estimate most probable state at time k using measurement up to time
Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi
 Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 41 Pulse Code Modulation (PCM) So, if you remember we have been talking
Communication Engineering Prof. Surendra Prasad Department of Electrical Engineering Indian Institute of Technology, Delhi Lecture - 41 Pulse Code Modulation (PCM) So, if you remember we have been talking
The Ensemble Kalman Filter:
 p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen, Ocean Dynamics, Vol 5, No p. The Ensemble
p.1 The Ensemble Kalman Filter: Theoretical formulation and practical implementation Geir Evensen Norsk Hydro Research Centre, Bergen, Norway Based on Evensen, Ocean Dynamics, Vol 5, No p. The Ensemble
Fundamental Probability and Statistics
 Fundamental Probability and Statistics "There are known knowns. These are things we know that we know. There are known unknowns. That is to say, there are things that we know we don't know. But there are
Fundamental Probability and Statistics "There are known knowns. These are things we know that we know. There are known unknowns. That is to say, there are things that we know we don't know. But there are
Lecture Note 2: Estimation and Information Theory
 Univ. of Michigan - NAME 568/EECS 568/ROB 530 Winter 2018 Lecture Note 2: Estimation and Information Theory Lecturer: Maani Ghaffari Jadidi Date: April 6, 2018 2.1 Estimation A static estimation problem
Univ. of Michigan - NAME 568/EECS 568/ROB 530 Winter 2018 Lecture Note 2: Estimation and Information Theory Lecturer: Maani Ghaffari Jadidi Date: April 6, 2018 2.1 Estimation A static estimation problem
At-A-Glance SIAM Events Mobile App
 At-A-Glance SIAM Events Mobile App Scan the QR code with any QR reader and download the TripBuilder EventMobile app to your iphone, ipad, itouch or Android mobile device.you can also visit www.tripbuildermedia.com/apps/siamevents
At-A-Glance SIAM Events Mobile App Scan the QR code with any QR reader and download the TripBuilder EventMobile app to your iphone, ipad, itouch or Android mobile device.you can also visit www.tripbuildermedia.com/apps/siamevents
This is Solving Linear Systems, chapter 3 from the book Advanced Algebra (index.html) (v. 1.0).
 (v. 1.0).") This is Solving Linear Systems, chapter 3 from the book Advanced Algebra (index.html) (v. 1.0). This book is licensed under a Creative Commons by-nc-sa 3.0 (http://creativecommons.org/licenses/by-nc-sa/
This is Solving Linear Systems, chapter 3 from the book Advanced Algebra (index.html) (v. 1.0). This book is licensed under a Creative Commons by-nc-sa 3.0 (http://creativecommons.org/licenses/by-nc-sa/
Newton s Law of Motion
 Newton s Law of Motion Physics 211 Syracuse University, Physics 211 Spring 2019 Walter Freeman February 7, 2019 W. Freeman Newton s Law of Motion February 7, 2019 1 / 21 Announcements Homework 3 due next
Newton s Law of Motion Physics 211 Syracuse University, Physics 211 Spring 2019 Walter Freeman February 7, 2019 W. Freeman Newton s Law of Motion February 7, 2019 1 / 21 Announcements Homework 3 due next
Statistical Methods in Applied Computer Science
 DD2447, DD3342 Statistical Methods in Applied Computer Science Stefan Arnborg, KTH http://www.nada.kth.se/~stefan SYLLABUS Common statistical models and their use: Bayesian, testing, and fiducial statistical
DD2447, DD3342 Statistical Methods in Applied Computer Science Stefan Arnborg, KTH http://www.nada.kth.se/~stefan SYLLABUS Common statistical models and their use: Bayesian, testing, and fiducial statistical
Learning Energy-Based Models of High-Dimensional Data
 Learning Energy-Based Models of High-Dimensional Data Geoffrey Hinton Max Welling Yee-Whye Teh Simon Osindero www.cs.toronto.edu/~hinton/energybasedmodelsweb.htm Discovering causal structure as a goal
Learning Energy-Based Models of High-Dimensional Data Geoffrey Hinton Max Welling Yee-Whye Teh Simon Osindero www.cs.toronto.edu/~hinton/energybasedmodelsweb.htm Discovering causal structure as a goal
HOW TO WRITE PROOFS. Dr. Min Ru, University of Houston
 HOW TO WRITE PROOFS Dr. Min Ru, University of Houston One of the most difficult things you will attempt in this course is to write proofs. A proof is to give a legal (logical) argument or justification
HOW TO WRITE PROOFS Dr. Min Ru, University of Houston One of the most difficult things you will attempt in this course is to write proofs. A proof is to give a legal (logical) argument or justification
For final project discussion every afternoon Mark and I will be available
 Worshop report 1. Daniels report is on website 2. Don t expect to write it based on listening to one project (we had 6 only 2 was sufficient quality) 3. I suggest writing it on one presentation. 4. Include
Worshop report 1. Daniels report is on website 2. Don t expect to write it based on listening to one project (we had 6 only 2 was sufficient quality) 3. I suggest writing it on one presentation. 4. Include
ADAPTIVE FILTER THEORY
 ADAPTIVE FILTER THEORY Fourth Edition Simon Haykin Communications Research Laboratory McMaster University Hamilton, Ontario, Canada Front ice Hall PRENTICE HALL Upper Saddle River, New Jersey 07458 Preface
ADAPTIVE FILTER THEORY Fourth Edition Simon Haykin Communications Research Laboratory McMaster University Hamilton, Ontario, Canada Front ice Hall PRENTICE HALL Upper Saddle River, New Jersey 07458 Preface
Introduction to Stochastic Processes
 Stat251/551 (Spring 2017) Stochastic Processes Lecture: 1 Introduction to Stochastic Processes Lecturer: Sahand Negahban Scribe: Sahand Negahban 1 Organization Issues We will use canvas as the course webpage.
Stat251/551 (Spring 2017) Stochastic Processes Lecture: 1 Introduction to Stochastic Processes Lecturer: Sahand Negahban Scribe: Sahand Negahban 1 Organization Issues We will use canvas as the course webpage.
Linear Models for Regression
 Linear Models for Regression Machine Learning Torsten Möller Möller/Mori 1 Reading Chapter 3 of Pattern Recognition and Machine Learning by Bishop Chapter 3+5+6+7 of The Elements of Statistical Learning
Linear Models for Regression Machine Learning Torsten Möller Möller/Mori 1 Reading Chapter 3 of Pattern Recognition and Machine Learning by Bishop Chapter 3+5+6+7 of The Elements of Statistical Learning
Stoichiometry. Cartoon courtesy of NearingZero.net
 Stoichiometry Cartoon courtesy of NearingZero.net Stoichiometry In solving a problem of this sort, the grand thing is to be able to reason backward. This is a very useful accomplishment, and a very easy
Stoichiometry Cartoon courtesy of NearingZero.net Stoichiometry In solving a problem of this sort, the grand thing is to be able to reason backward. This is a very useful accomplishment, and a very easy
Discrete Mathematics and Probability Theory Spring 2014 Anant Sahai Note 10
 EECS 70 Discrete Mathematics and Probability Theory Spring 2014 Anant Sahai Note 10 Introduction to Basic Discrete Probability In the last note we considered the probabilistic experiment where we flipped
EECS 70 Discrete Mathematics and Probability Theory Spring 2014 Anant Sahai Note 10 Introduction to Basic Discrete Probability In the last note we considered the probabilistic experiment where we flipped
Organization. I MCMC discussion. I project talks. I Lecture.
 Organization I MCMC discussion I project talks. I Lecture. Content I Uncertainty Propagation Overview I Forward-Backward with an Ensemble I Model Reduction (Intro) Uncertainty Propagation in Causal Systems
Organization I MCMC discussion I project talks. I Lecture. Content I Uncertainty Propagation Overview I Forward-Backward with an Ensemble I Model Reduction (Intro) Uncertainty Propagation in Causal Systems
At A Glance. UQ16 Mobile App.
 At A Glance UQ16 Mobile App Scan the QR code with any QR reader and download the TripBuilder EventMobile app to your iphone, ipad, itouch or Android mobile device. To access the app or the HTML 5 version,
At A Glance UQ16 Mobile App Scan the QR code with any QR reader and download the TripBuilder EventMobile app to your iphone, ipad, itouch or Android mobile device. To access the app or the HTML 5 version,
Development of Stochastic Artificial Neural Networks for Hydrological Prediction
 Development of Stochastic Artificial Neural Networks for Hydrological Prediction G. B. Kingston, M. F. Lambert and H. R. Maier Centre for Applied Modelling in Water Engineering, School of Civil and Environmental
Development of Stochastic Artificial Neural Networks for Hydrological Prediction G. B. Kingston, M. F. Lambert and H. R. Maier Centre for Applied Modelling in Water Engineering, School of Civil and Environmental
Gaussian Processes. Le Song. Machine Learning II: Advanced Topics CSE 8803ML, Spring 2012
 Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
The Kalman Filter ImPr Talk
 The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
The Kalman Filter ImPr Talk Ged Ridgway Centre for Medical Image Computing November, 2006 Outline What is the Kalman Filter? State Space Models Kalman Filter Overview Bayesian Updating of Estimates Kalman
Probabilistic Graphical Models
 Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Probabilistic Graphical Models Brown University CSCI 2950-P, Spring 2013 Prof. Erik Sudderth Lecture 13: Learning in Gaussian Graphical Models, Non-Gaussian Inference, Monte Carlo Methods Some figures
Expectation Propagation in Dynamical Systems
 Expectation Propagation in Dynamical Systems Marc Peter Deisenroth Joint Work with Shakir Mohamed (UBC) August 10, 2012 Marc Deisenroth (TU Darmstadt) EP in Dynamical Systems 1 Motivation Figure : Complex
Expectation Propagation in Dynamical Systems Marc Peter Deisenroth Joint Work with Shakir Mohamed (UBC) August 10, 2012 Marc Deisenroth (TU Darmstadt) EP in Dynamical Systems 1 Motivation Figure : Complex
Detection and Estimation Theory
 Detection and Estimation Theory Instructor: Prof. Namrata Vaswani Dept. of Electrical and Computer Engineering Iowa State University http://www.ece.iastate.edu/ namrata Slide 1 What is Estimation and Detection
Detection and Estimation Theory Instructor: Prof. Namrata Vaswani Dept. of Electrical and Computer Engineering Iowa State University http://www.ece.iastate.edu/ namrata Slide 1 What is Estimation and Detection
9/12/17. Types of learning. Modeling data. Supervised learning: Classification. Supervised learning: Regression. Unsupervised learning: Clustering
 Types of learning Modeling data Supervised: we know input and targets Goal is to learn a model that, given input data, accurately predicts target data Unsupervised: we know the input only and want to make
Types of learning Modeling data Supervised: we know input and targets Goal is to learn a model that, given input data, accurately predicts target data Unsupervised: we know the input only and want to make
Stochastic Analogues to Deterministic Optimizers
 Stochastic Analogues to Deterministic Optimizers ISMP 2018 Bordeaux, France Vivak Patel Presented by: Mihai Anitescu July 6, 2018 1 Apology I apologize for not being here to give this talk myself. I injured
Stochastic Analogues to Deterministic Optimizers ISMP 2018 Bordeaux, France Vivak Patel Presented by: Mihai Anitescu July 6, 2018 1 Apology I apologize for not being here to give this talk myself. I injured
Physics 1140 Fall 2013 Introduction to Experimental Physics
 Physics 1140 Fall 2013 Introduction to Experimental Physics Joanna Atkin Lecture 5: Recap of Error Propagation and Gaussian Statistics Graphs and linear fitting Experimental analysis Typically make repeat
Physics 1140 Fall 2013 Introduction to Experimental Physics Joanna Atkin Lecture 5: Recap of Error Propagation and Gaussian Statistics Graphs and linear fitting Experimental analysis Typically make repeat
Monday, October 24, Trigonometry, Period 3
 Monday, Trigonometry, Period 3 Lesson Overview: Warm Up Go over homework Writing Sinusoidal Functions to Model Simple Harmonic Motion 1 Recap: The past few classes, we ve been talking about simple harmonic
Monday, Trigonometry, Period 3 Lesson Overview: Warm Up Go over homework Writing Sinusoidal Functions to Model Simple Harmonic Motion 1 Recap: The past few classes, we ve been talking about simple harmonic
OPTIMAL ESTIMATION of DYNAMIC SYSTEMS
 CHAPMAN & HALL/CRC APPLIED MATHEMATICS -. AND NONLINEAR SCIENCE SERIES OPTIMAL ESTIMATION of DYNAMIC SYSTEMS John L Crassidis and John L. Junkins CHAPMAN & HALL/CRC A CRC Press Company Boca Raton London
CHAPMAN & HALL/CRC APPLIED MATHEMATICS -. AND NONLINEAR SCIENCE SERIES OPTIMAL ESTIMATION of DYNAMIC SYSTEMS John L Crassidis and John L. Junkins CHAPMAN & HALL/CRC A CRC Press Company Boca Raton London
Bayes Nets: Sampling
 Bayes Nets: Sampling [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] Approximate Inference:
Bayes Nets: Sampling [These slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials are available at http://ai.berkeley.edu.] Approximate Inference:
Learning outcomes: You will learn:
 1 Learning outcomes: You will learn: 1. To state that forces can change the state of rest or motion of a body change the size and/or shape of a body bring about turning effects in objects (e.g. levers)
1 Learning outcomes: You will learn: 1. To state that forces can change the state of rest or motion of a body change the size and/or shape of a body bring about turning effects in objects (e.g. levers)
CSEP 573: Artificial Intelligence
 CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1 Outline Probabilistic
CSEP 573: Artificial Intelligence Hidden Markov Models Luke Zettlemoyer Many slides over the course adapted from either Dan Klein, Stuart Russell, Andrew Moore, Ali Farhadi, or Dan Weld 1 Outline Probabilistic
An introduction to plotting data
 An introduction to plotting data Eric D. Black California Institute of Technology v2.0 1 Introduction Plotting data is one of the essential skills every scientist must have. We use it on a near-daily basis
An introduction to plotting data Eric D. Black California Institute of Technology v2.0 1 Introduction Plotting data is one of the essential skills every scientist must have. We use it on a near-daily basis
Bayesian Concept Learning
 Learning from positive and negative examples Bayesian Concept Learning Chen Yu Indiana University With both positive and negative examples, it is easy to define a boundary to separate these two. Just with
Learning from positive and negative examples Bayesian Concept Learning Chen Yu Indiana University With both positive and negative examples, it is easy to define a boundary to separate these two. Just with
4. DATA ASSIMILATION FUNDAMENTALS
 4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
4. DATA ASSIMILATION FUNDAMENTALS... [the atmosphere] "is a chaotic system in which errors introduced into the system can grow with time... As a consequence, data assimilation is a struggle between chaotic
Results: MCMC Dancers, q=10, n=500
 Motivation Sampling Methods for Bayesian Inference How to track many INTERACTING targets? A Tutorial Frank Dellaert Results: MCMC Dancers, q=10, n=500 1 Probabilistic Topological Maps Results Real-Time
Motivation Sampling Methods for Bayesian Inference How to track many INTERACTING targets? A Tutorial Frank Dellaert Results: MCMC Dancers, q=10, n=500 1 Probabilistic Topological Maps Results Real-Time
Math 350: An exploration of HMMs through doodles.
 Math 350: An exploration of HMMs through doodles. Joshua Little (407673) 19 December 2012 1 Background 1.1 Hidden Markov models. Markov chains (MCs) work well for modelling discrete-time processes, or
Math 350: An exploration of HMMs through doodles. Joshua Little (407673) 19 December 2012 1 Background 1.1 Hidden Markov models. Markov chains (MCs) work well for modelling discrete-time processes, or
Learning from Data: Regression
 November 3, 2005 http://www.anc.ed.ac.uk/ amos/lfd/ Classification or Regression? Classification: want to learn a discrete target variable. Regression: want to learn a continuous target variable. Linear
November 3, 2005 http://www.anc.ed.ac.uk/ amos/lfd/ Classification or Regression? Classification: want to learn a discrete target variable. Regression: want to learn a continuous target variable. Linear
Linear Models for Regression CS534
 Linear Models for Regression CS534 Example Regression Problems Predict housing price based on House size, lot size, Location, # of rooms Predict stock price based on Price history of the past month Predict
Linear Models for Regression CS534 Example Regression Problems Predict housing price based on House size, lot size, Location, # of rooms Predict stock price based on Price history of the past month Predict
CSE 473: Artificial Intelligence
 CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
CSE 473: Artificial Intelligence Hidden Markov Models Dieter Fox --- University of Washington [Most slides were created by Dan Klein and Pieter Abbeel for CS188 Intro to AI at UC Berkeley. All CS188 materials
State Space Models for Wind Forecast Correction
 for Wind Forecast Correction Valérie 1 Pierre Ailliot 2 Anne Cuzol 1 1 Université de Bretagne Sud 2 Université de Brest MAS - 2008/28/08 Outline 1 2 Linear Model : an adaptive bias correction Non Linear
for Wind Forecast Correction Valérie 1 Pierre Ailliot 2 Anne Cuzol 1 1 Université de Bretagne Sud 2 Université de Brest MAS - 2008/28/08 Outline 1 2 Linear Model : an adaptive bias correction Non Linear
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
PILCO: A Model-Based and Data-Efficient Approach to Policy Search
 PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
PILCO: A Model-Based and Data-Efficient Approach to Policy Search (M.P. Deisenroth and C.E. Rasmussen) CSC2541 November 4, 2016 PILCO Graphical Model PILCO Probabilistic Inference for Learning COntrol
Recent Advances in Bayesian Inference Techniques
 Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Data Assimilation Research Testbed Tutorial
 Data Assimilation Research Testbed Tutorial Section 3: Hierarchical Group Filters and Localization Version 2.: September, 26 Anderson: Ensemble Tutorial 9//6 Ways to deal with regression sampling error:
Data Assimilation Research Testbed Tutorial Section 3: Hierarchical Group Filters and Localization Version 2.: September, 26 Anderson: Ensemble Tutorial 9//6 Ways to deal with regression sampling error:
(Extended) Kalman Filter
 Kalman Filter") (Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
(Extended) Kalman Filter Brian Hunt 7 June 2013 Goals of Data Assimilation (DA) Estimate the state of a system based on both current and all past observations of the system, using a model for the system
Convex envelopes, cardinality constrained optimization and LASSO. An application in supervised learning: support vector machines (SVMs)
") ORF 523 Lecture 8 Princeton University Instructor: A.A. Ahmadi Scribe: G. Hall Any typos should be emailed to a a a@princeton.edu. 1 Outline Convexity-preserving operations Convex envelopes, cardinality
ORF 523 Lecture 8 Princeton University Instructor: A.A. Ahmadi Scribe: G. Hall Any typos should be emailed to a a a@princeton.edu. 1 Outline Convexity-preserving operations Convex envelopes, cardinality
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.
Autonomous Mobile Robot Design Topic: Extended Kalman Filter Dr. Kostas Alexis (CSE) These slides relied on the lectures from C. Stachniss, J. Sturm and the book Probabilistic Robotics from Thurn et al.