Linear Algebra. Session 12
|
|
|
- Godwin Davidson
- 5 years ago
- Views:
Transcription
1 Linear Algebra. Session 12 Dr. Marco A Roque Sol 08/01/2017
2 Example 12.1 Find the constant function that is the least squares fit to the following data x f(x) Solution c = 1 c = 0 f (x) = c c = 1 c = c
3 Then, the normal system is ( ) c = ( ) c = 1 4 ( ) = 1 (mean arithmetic value) Thus, the constant function is f (x) =
4 Example 12.2 Find the linear polynomial function that is the least squares fit to the following data x f(x) Solution c 1 = 1 c f (x) = c 1 + c 2 x 1 + c 2 = 0 c 1 + 2c 2 = 1 c 1 + 3c 2 = ( c1 c 2 ) =
5 Then, the nomal system is ( ) ( ) ( c1 c 2 Thus, the linear function is ( c1 ) = c 2 ) = ( 4 8 ) f (x) = x ( { c1 = 0.4 c 2 = 0.4 )
6 Example 12.3 Find the quadratic polynomial function that is the least squares fit to the following data x f(x) Solution c 1 = 1 f (x) = c 1 + c 2 x + c 3 x 2 c 1 + c 2 + c 3 = 0 c 1 + 2c 2 + 4c 3 = 1 c 1 + 3c 2 + 9c 3 = 2
7 Then, the nomal system is c 1 c 2 c 3 = c 1 c 2 c =
8 c 1 c 2 c 3 Thus, the quadratic function is = f (x) = x + 0.5x 2 c 1 = 0.9 c 2 = 1.1 c 3 = 0.5
9 Orthogonal sets Let <, > denote the scalar product in R n Definition Nonzero vectors v 1, v 2,, v k R n form an orthogonal set if they are orthogonal to each other: < v i, v j >= 0 for all i j. If, in addition, all vectors are of unit length, v i, v 1, v 2,, v k is called an orthonormal set. For instance, The standard basis e 1 = (1, 0, 0,..., 0), e 2 = (0, 1, 0,..., 0),, e n = (0, 0, 0,..., 1). It is an orthonormal set.
10 Orthonormal bases Suppose v 1, v 2,, v n is an orthonormal basis for R n (i.e., it is a basis and an orthonormal set). Theorem Let x = x 1 v 1 + x 2 v x n v n and y = y 1 v 1 + y 2 v y n v n where x i, y 1 R i) < x, y >= n i=i x iy i i) x = n i=i x iy i
11 proof i) n n < x, y >= x i v i, y j v j = i=i j=i n x i i=i j=i n y j v i, v j = ii) follows from i) when y = x n n x i v i, v j = i=i j=i n x i y i i=i
12 Suppose V is a subspace of R n. Let p be the orthogonal projection of a vector x R n onto V. If V is a one-dimensional subspace spanned by a v, then p = <x,v> <v,v> v If V admits an orthogonal basis v 1, v 2,, v k, then p = < x, v 1 > < v 1, v 1 > v 1 + < x, v 2 > < v 2, v 2 > v < x, v k > < v k, v k > v k Indeed, < p, v i >= k <x,v j > j=i <v j,v j > < v j, v i >= <x,v i > <v i,v i > < v i, v i >=< x, v i > < x p, v i >= 0 (x p) v i (x p) V.
13 Coordinates relative to an orthogonal basis Theorem If v 1, v 2,, v n is an orthogonal basis for R n, then x = < x, v 1 > < v 1, v 1 > v 1 + < x, v 2 > < v 2, v 2 > v < x, v n > < v n, v n > v n for any vector x R n Corollary If v 1, v 2,, v n is an orthonormal basis for R n, then z =< x, v 1 > v 1 + < x, v 2 > v < x, v n > v n for any vector x R n.
14 . Let V be a subspace of R n. Suppose x 1, x 2,, x k is a basis for V. Let v 1 = x 1 v 2 = x 2 <x 2,v 1 > <v 1,v 1 > v 1 v 3 = x 3 <x 3,v 1 > <v 1,v 1 > v 1 <x 3,v 2 > <v 2,v 2 > v 2 v k = x k <x k,v 1 > <v 1,v 1 > v 1 <x k,v 2 > <v 2,v 2 > v 2 <x k,v k 1 > <v k 1,v k 1 > v k 1 Then v 1, v 2,, v k is an orthogonal basis for V.
15 . Properties of the Gram-Schmidt process: Any basis x 1, x 2,, x k Orthogonal basis v 1, v 2,, v k v j = x j (α 1 x 1 α 2 x 2 α j 1 x j 1 ); 1 j k the span of v 1, v 2,, v j is the same as the span of x 1, x 2,, x j v j is orthogonal to x 1, x 2,, x j 1 v j = x j p j where p j is the orthogonal projection of the vector x j on the subspace spanned by x 1, x 2,..., x k v j is the distance from x j to the subspace spanned by x 1, x 2,..., x j 1
16 . Normalization Let V be a subspace of R n. Suppose v 1, v 2,, v k is an orthogonal basis for V Let w 1 = v 2 v 2, w 2 = v 2 v 2,..., w k = v k v k Then w 1, w 2,..., w k is an orthonormal basis for V. Theorem Any non-trivial subspace of R n admits an orthonormal basis.
17 . Example 12.4 Let Π the plane spanned by vectors x 1 = (1, 1, 0), x 2 = (0, 1, 1). i) Find the orthogonal projection of the vector y = (4, 0, 1) onto the plane Π. i) Find the distance from y to Π. Solution First we apply the Gram-Schmidt process to the basis x 1, x 2. v 1 = x 1 = (1, 0, 0)
18 . v 2 = x 2 <x 2,v 1 > <v 1,v 1 > v 1 = (0, 1, 1) 1 2 (1, 1, 0) = ( 1/2, 1/2, 1) v 3 = x 3 <x 3,v 1 > <v 1,v 1 > v 1 <x 3,v 2 > <v 2,v 2 > v 2 Now that v 1, v 2 is an orthogonal basis for Π, the orthogonal projection of y onto Π is p = < y, v 1 > < v 1, v 1 > v 1+ < y, v 2 > < v 2, v 2 > v 2 = 4 3 (1, 0, 0)+ ( 1/2, 1/2, 1) = (2, 2 3/2 The distance from y to Π is o = y p = (1, 1, 1) = 3
19 . Example 12.5 Find the distance from the point y = (0, 0, 0, 1) to the subspace V R 4 spanned by vectors x 1 = (1, 1, 1, 1), x 2 = (1, 1, 3, 1), x 3 = ( 3, 7, 1, 3),. Solution First we apply the Gram-Schmidt process to the basis x 1, x 2, x 3 and obtain an orthogonal basis v 1, v 2, v 3 for the subspace V Next we compute the orthogonal projection p of the vector y onto V p = < y, v 1 > < v 1, v 1 > v 1 + < y, v 2 > < v 2, v 2 > v 2 + < y, v 3 > < v 3, v 3 > v 3
20 . Then the distance from y to V equals to o = y p Alternatively, we can apply t he Gram-Schmidt process to vectors x 1, x 2, x 3, y. We should obtain an orthogonal system v 1, v 2, v 3, v 4. Then t he desired distance will be v 4. v 1 = x 1 = (1, 1, 1, 1) v 2 = x 2 <x 2,v 1 > <v 1,v 1 > v 1 = (1, 1, 3, 1) 4 4 (1, 1, 1, 1) = ( 1/2, 1/2, 1) v 3 = x 3 <x 3,v 1 > <v 1,v 1 > v 1 <x 3,v 2 > <v 2,v 2 > v 2 = ( 3, 7, 1, 3) 12 4 (1, 1, 1, 1) 16 8 (0, 2, 2, 0) = (0, 0, 0, 0)
21 . The Gram-Schmidt process can be used to check linear independence of vectors!. It failed because the vector x 3 is a linear combination of x 1 and x 2. V is a plane, not a 3 dimensional subspace. To fix things, it is enough to drop x 3, i.e., we should orthogonalize vectors x 1, x 2, y. ˆv 3 = y <y,v 1> <v 1,v 1 > v 1 <y,v 2> <v 2,v 2 > v 2 = (0, 0, 0, 1) 1 4 (1, 1, 1, 3) 0 8 (0, 2, 2, 0) = (1/4, 1/4, 1/4, 3/4) Then the distance from y to V equals to ˆv 3 = (1/4, 1/4, 1/4, 3/4) = 12 4
22 Norm The notion of norm generalizes the notion of length of a vector in R n. Definition. Let V be a vector space. A function α : V R n is called a norm on V if it has the following properties: α(x) 0, α(x) = 0 only for x = 0 (Positivy) α(rx) = r α(x) for all r R. (Homogeneity)
23 α(x + y) α(x) + α(y). (Triangle Inequality) Notation. The norm of a vector x V is usually denoted by x. Different norms on V are distinguished by subscripts, e.g., x 1 and x 2.
24 Let V = R n and let x = (x 1, x 2,..., x n ) be a vector in V x = max{ x 1, x 2,..., x n } Positivity and homogeneity are obvious. Let x = (x 1, x 2,..., x n ) and y = (y 1, y 2,..., y n ). Then x + y = (x 1 + y 1, x 2 + y 2,..., x n + y n ) x i + y i x i + y i max j x j + max j y j max j x i + y i max j x j + max j y j x + y x + y
25 x 1 = x 1 + x x n Positivity and homogeneity are obvious. Let x = (x 1, x 2,..., x n ) and y = (y 1, y 2,..., y n ). Then x + y = (x 1 + y 1, x 2 + y 2,..., x n + y n ) x i + y i x i + y i i x i + y i i x i + i y i x + y 1 x 1 + y 1
26 x p = ( x 1 p + x 2 p x n p ) 1/p Positivity and homogeneity are obvious. Let x = (x 1, x 2,..., x n ) and y = (y 1, y 2,..., y n ). Then x + y = (x 1 + y 1, x 2 + y 2,..., x n + y n ). Now, using the Minkoswky Inequality ( x 1 + y 1 p + x 2 + y 2 p + + x n + y n p ( x 1 p + x 2 p + + x n p ) 1/p + ( y 1 p + y 2 p + + y n p ) 1/p with p > 0 it follows that x + y p x p + y p
27 Normed vector space Definition. A normed vector space is a vector space endowed with a norm. The norm defines a distance function on the normed vector space: dist(x, y) = y y. Then we say that a vector x is a good approximation of a vector x 0 if dist(x, x 0 ) is small. Also, we say that a sequence of vectors x 1, x 2,..., x n converges to a vector x if dist(x, x n ) 0 as n.
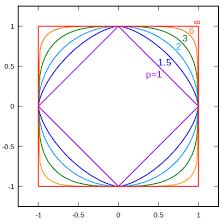
28 Unit circle on the normed vector space V = R n : {x V : x p = 1} x 1 = ( x 1 + x 2 x 3/2 = ( x 1 3/2 + x 2 3/2 ) 3/2 x 2 = ( x x 2 2 ) 1/2 x 3 = ( x x 2 3 ) 1/3 x 6 = ( x x 2 6 ) 1/6 x = max{ x 1 + x 2 }
29
30 V = C[a, b], f : [a, b] R f = max a x b f (x) f 1 = inta b f (x) dx f p = ( inta b f (x) p dx ) 1/p, p 1 Theorem f p is a norm on C[a, b] for any p 1
31 Abstract Linear Algebra The notion of inner product generalizes the notion of dot product of vectors in R n Definition Let V be a vector space. A function β : V V R usually denoted β(x, y) =< x, y > is called an inner product on V if it is positive, symmetric, and bilinear. That is, if i) < x, x > 0, < x, x >= 0 only for x = 0 (Positivity) ii) < x, y >=< y, x > (Symmetry)
32 Abstract Linear Algebra iii) < rx, y >= r < y, x > (Homogeneity ) iv) < x + y, z >=< x, z > + < y, z > (Distributive Law ) An inner product space is a vector space endowed with an inner product.
33 Abstract Linear Algebra V = R n Remarks < x, y >= x y = x 1 y 1 + x 2 y x n y n < x, y >= d 1 x 1 y 1 + d 2 x 2 y d n x n y n where d 1, d 2,..., d n > 0 < x, y >= (Dx) (Dy) where D is an invertible n n matrix. a) Invertibility of D is necessary to show that < x, x >= 0 x = 0 b) The second example is a particular case of the third one when D = diag(d 1/2 1, d 1/2 2,..., dn 1/2 ).
34 Abstract Linear Algebra Example 12.6 Find an inner product on R 2 such that < e 1, e 1 >= 1, < e 2, e 1 >= 3, and < e 1, e 2 >= 1 where e 1 = (1, 0), e 2 = (0, 1) Solution Let x = (x 1, x 2 ), y = (y 1, y 2 ) R 2. Then using bilinearity, we obtain < x, y >=< x 1 e 1 + x 2 e 2, y 1 e 1 + y 2 e 2 >= x 1 y 1 < e 1, e 1 > +x 1 y 2 < e 1, e 2 > +x 2 y 1 < e 2, e 1 > +y 1 y 1 < e 2, e 2 >=
35 Abstract Linear Algebra < x, y >= 2x 1 y 1 x 1 y 2 x 2 y 1 + 3x 2 y 2 It remains to check that < x, x > > 0 for x 0 Indeed, < x, x >= 2x 2 1 y 1 2x 1 x 2 + 3x 2 2 = (x 1 x 2 ) 2 + x x 2 2 > 0 for x 0
36 Abstract Linear Algebra V = M m,n (R), space of m n matrices. < A, B >= trace(ab T ) If A = (a ij ) and B = (b ij ), then < A, B >= m i=1 n j=1 a ijb ij V = C[a, b]. < f, g >= b a f (x)g(x)dx < f, g >= b a w(x)f (x)g(x)dx where w is bounded, piecewise continuous, and w > 0 everywhere on [a, b]. w is called the weight function
37 Abstract Linear Algebra Theorem Suppose < x, y > is an inner product on a vector space V. Then for all x, y V Proof < x, y > 2 < x, x >< y, y > For any t R let v t = x + ty then < v t, v t >=< x + ty, x + ty >=< x, x > +t < x, y > + t < y, x > +t 2 < y, y >
38 Abstract Linear Algebra Now, assume that y 0 and let t = <x,y> <y,y>. Then < v t, v t >=< x, x > <x,y>2 <y,y> since < v t, v t > 0 the desired inequality follows. In the case y = 0, we have < x, y >=< y, y >= 0
39 Abstract Linear Algebra Cauchy-Schwarz Inequality < x, y > < x, x > < y, y > Corollary < x, y > x y Corollary For any f, g C[a, b], ( b a f (x)g(x)dx ) 2 b a f (x) 2 dx b a g(x) 2 dx
40 Abstract Linear Algebra Norms induced by inner products Theorem Suppose < x, y > is an inner product on a vector space V. Then, x = < x, x > is a norm. Proof Positivity is obvious. Homogeneity: rx = < rx, rx > = r < x, x > = r x Triangle inequality (follows from Cauchy-Schwarzs): x + y 2 =< x + y, x + y >=< x, x > + < x, y > + < y, x > + < y, y >
41 Abstract Linear Algebra < x, x > + < x, y > + < y, x > + < y, y > x x y + y 2 = ( x + y ) 2
42 Abstract Linear Algebra The length of a vector in R n. x = x1 2 + x x n 2 ( b 1/2 The norm f 2 = a dx) f (x) 2 = on the vector space C[a, b] is induced by the inner product < f, g >= b a f (x)g(x)dx
43 Abstract Linear Algebra Angle Let V be an inner product space with an inner product <, > and the induced norm. Then < x, y > x y for all x, y V (the Cauchy-Schwarz inequality). Therefore we can define the angle between nonzero vectors in V by ) (x, y) = arcos ( <x,y> x y Then < x, y >= x y (x, y). In particular, vectors x and y are orthogonal (denoted x y if < x, y >= 0.
44 Abstract Linear Algebra Orthogonal sets Let V be an inner product space with an inner product <, > and the induced norm. Definition A nonempty set S V of nonzero vectors is called an orthogonal set if all vectors in S are mutually orthogonal. That is, 0 / S and < x, y >= 0 for any x, y S, x y. An orthogonal set S V is called orthonormal if x = 1 for any x S.
45 Abstract Linear Algebra Remark. Vectors v 1, v 2,..., v n V form an orthonormal set if and only if { 1, if i = j, < v i, v j >= 0, if i j,
46 . Singular Value Decomposition In this section, we assume throughout that A is an m n matrix with m n. (This assumption is made for convenience only; all the results will also hold if m < n). We will present a method for determining how close A is to a matrix of smaller rank. The method involves factoring A into a product UΣV T, where U is an m m orthogonal matrix, V is an n n orthogonal matrix, and Σ is an m n matrix whose off-diagonal entries are all 0 s and whose diagonal elements satisfy σ 1 σ 2 σ n 0
47 . Σ = σ 1 σ 2... σ n The σ s determined by this factorization are unique and are called the singular values of A. The factorization UΣV T is called the singular value decomposition of A, or, for short, the SVD of A.
48 . The SVD Theorem If A is an m n matrix, then A has a singular value decomposition Sketch of the proof A T A is a symmetric n n matrix. The eigenvalues of A T A are all real and it has an orthogonal diagonalizing matrix V. Furthermore, its eigenvalues must all be nonnegative. To see this point, let λ be an eigenvalue of A T A and x be an eigenvector belonging to λ. It follows that
49 . Ax 2 = x T A T Ax = x T λx = λx T x = λ x 2 λ = Ax 2 x 2 We may assume that the columns of V have been ordered so that the corresponding eigenvalues satisfy λ 1 λ 2 λ n 0. The singular values are given by σ j = λ j, j = 1, 2,..., n
50 . Let r denote the rank of A. The matrix A T A will also have rank r. Since A T A is symmetric, its rank equals the number of nonzero eigenvalues. Thus, σ 1 σ 2 σ r > 0 σ r+1 = σ r+2 = = σ n = 0 Now let V 1 = (v 1, v 2,..., v r, ) and V 2 = (v r+1, v r+2,..., v n, ) The column vectors of V 1 are eigenvectors of A T A belonging to λ i, i = 1, 2,..., r. The column vectors of V 2 are eigenvectors of A T A belonging to λ j = 0, j = r + 1, r + 2,..., n.
51 . Now let Σ 1 be the r r matrix defined by Σ 1 = σ 1 σ 2... σ n The m n matrix Σ is then given by ( ) Σ1 0 Σ = 0 0
52 . To complete the proof, we must show how to construct an m m orthogonal matrix U such that A = UΣV T AV = UΣ Comparing the first r columns of each side of the last equation, we see that Thus, if we define Av i = σ i v i, u i = 1 σ i Av i, i = 1, 2,..., r i = 1, 2,..., r
53 . and then it follows that U 1 = (u 1, u 2,..., u r ) AV 1 = U 1 Σ 1 The column vectors of U 1 form an orthonormal set. Thus, form an orthonormal basis for R(A). The vector space R(A) = N(A T ) has dimension m r. Let {u r+1, u r+2,, u n } be an orthonormal basis for N(A T ) and set U 2 = (u r+1, u r+2,..., u n )
54 . Setthe m n matrix U by U = (U 1, U 2 ) The the matrices U, Σ, and V satisfy A = UΣV T
55 . Observations Let A be an m n matrix with a singular value decomposition A = UΣV T. The singular values σ 1,..., σ n of A are unique; however, the matrices U and V are not unique. Since V diagonalizes A T A, it follows that the v j s are eigenvectors of A T A. Since AA T = UΣΣ T U T, it follows that U diagonalizes AA T and that the u j s are eigenvectors of AAT. The v j s are called the right singular vectors of A, and the u j s are called the left singular vectors of A.
56 . If A has rank r, then (i) v 1, v 2,..., v r form an orthonormal basis for R(A T ). (ii) v r+1, v r+2,..., v n form an orthonormal basis for N(A). (iii) u 1, u 2,..., u r form an orthonormal basis for R(A). (iv) u r+1, u r+2,..., u r+n form an orthonormal basis for N(A T ) The rank of the matrix A is equal to the number of its nonzero singular values (where singular values are counted according to multiplicity).
57 . In the case that A has rank r < n, if we set V 1 = (v 1, v 2,..., v r ) U 1 = (u 1, u 2,..., u r ) and define Σ 1 as before, then A = U 1 Σ 1 V T 1 This factorization, is called the compact form of the singular value decomposition of A. This form is useful in many applications
58 . Example 12.7 let A = Compute the singular values and the singular value decomposition of A Solution The matrix AA T = ( )
59 . has eigenvalues λ 1 = 4 and λ 2 = 0. Consequently, the singular values of A are σ 1 = 2 and σ 2 = 0 The eigenvalue λ 1 has eigenvectors of the form α(1, 1) T, and σ 2 has eigenvectors of the form β(1, 1) T. Therefore, the orthogonal matrix V = 1 2 ( )
60 . diagonalizes A T A. From what we discussed before, it follows that u 1 = 1 Av 1 = 1 σ ( 1/ 2 1/ 2 ) = 1/ 2 1/ 2 0 The remaining column vectors of U must form an orthonormal basis for N(A T ). We can compute a basis {x 2, x 3 } for N(A T ) in the usual way. x 2 = (1, 1, 0) T, x 3 = (0, 0, 1) T Since these vectors are already orthogonal, it is not necessary to use the Gram-Schmidt process to obtain an orthonormal basis.
61 . We need only set u 2 = 1 x 2 x 2 = ( 1 2, 1 2, 0) T, u 3 = 1 x 3 x 3 = (0, 0, 1) T It then follows that A = UΣV T = ( )
62 . OBS If A has singular value decomposition UΣV T, then A can be represented by the outer product expansion A = σ 1 u 1 v T 1 + σ 2 u 2 v T σ n u n v T n The closest matrix of rank k, is obtained by truncating this sum, after the first k terms: A = σ 1 u 1 v T 1 + σ 1 u 2 v T σ n u k v T k, k < n
MATH 304 Linear Algebra Lecture 19: Least squares problems (continued). Norms and inner products.
. Norms and inner products.") MATH 304 Linear Algebra Lecture 19: Least squares problems (continued). Norms and inner products. Orthogonal projection Theorem 1 Let V be a subspace of R n. Then any vector x R n is uniquely represented
MATH 304 Linear Algebra Lecture 19: Least squares problems (continued). Norms and inner products. Orthogonal projection Theorem 1 Let V be a subspace of R n. Then any vector x R n is uniquely represented
MATH 304 Linear Algebra Lecture 18: Orthogonal projection (continued). Least squares problems. Normed vector spaces.
. Least squares problems. Normed vector spaces.") MATH 304 Linear Algebra Lecture 18: Orthogonal projection (continued). Least squares problems. Normed vector spaces. Orthogonality Definition 1. Vectors x,y R n are said to be orthogonal (denoted x y)
MATH 304 Linear Algebra Lecture 18: Orthogonal projection (continued). Least squares problems. Normed vector spaces. Orthogonality Definition 1. Vectors x,y R n are said to be orthogonal (denoted x y)
Linear Algebra Massoud Malek
 CSUEB Linear Algebra Massoud Malek Inner Product and Normed Space In all that follows, the n n identity matrix is denoted by I n, the n n zero matrix by Z n, and the zero vector by θ n An inner product
CSUEB Linear Algebra Massoud Malek Inner Product and Normed Space In all that follows, the n n identity matrix is denoted by I n, the n n zero matrix by Z n, and the zero vector by θ n An inner product
MATH 304 Linear Algebra Lecture 20: The Gram-Schmidt process (continued). Eigenvalues and eigenvectors.
. Eigenvalues and eigenvectors.") MATH 304 Linear Algebra Lecture 20: The Gram-Schmidt process (continued). Eigenvalues and eigenvectors. Orthogonal sets Let V be a vector space with an inner product. Definition. Nonzero vectors v 1,v
MATH 304 Linear Algebra Lecture 20: The Gram-Schmidt process (continued). Eigenvalues and eigenvectors. Orthogonal sets Let V be a vector space with an inner product. Definition. Nonzero vectors v 1,v
DS-GA 1002 Lecture notes 0 Fall Linear Algebra. These notes provide a review of basic concepts in linear algebra.
 DS-GA 1002 Lecture notes 0 Fall 2016 Linear Algebra These notes provide a review of basic concepts in linear algebra. 1 Vector spaces You are no doubt familiar with vectors in R 2 or R 3, i.e. [ ] 1.1
DS-GA 1002 Lecture notes 0 Fall 2016 Linear Algebra These notes provide a review of basic concepts in linear algebra. 1 Vector spaces You are no doubt familiar with vectors in R 2 or R 3, i.e. [ ] 1.1
UNIT 6: The singular value decomposition.
 UNIT 6: The singular value decomposition. María Barbero Liñán Universidad Carlos III de Madrid Bachelor in Statistics and Business Mathematical methods II 2011-2012 A square matrix is symmetric if A T
UNIT 6: The singular value decomposition. María Barbero Liñán Universidad Carlos III de Madrid Bachelor in Statistics and Business Mathematical methods II 2011-2012 A square matrix is symmetric if A T
Chapter 3 Transformations
 Chapter 3 Transformations An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Linear Transformations A function is called a linear transformation if 1. for every and 2. for every If we fix the bases
Chapter 3 Transformations An Introduction to Optimization Spring, 2014 Wei-Ta Chu 1 Linear Transformations A function is called a linear transformation if 1. for every and 2. for every If we fix the bases
INNER PRODUCT SPACE. Definition 1
 INNER PRODUCT SPACE Definition 1 Suppose u, v and w are all vectors in vector space V and c is any scalar. An inner product space on the vectors space V is a function that associates with each pair of
INNER PRODUCT SPACE Definition 1 Suppose u, v and w are all vectors in vector space V and c is any scalar. An inner product space on the vectors space V is a function that associates with each pair of
Linear Algebra Review
 January 29, 2013 Table of contents Metrics Metric Given a space X, then d : X X R + 0 and z in X if: d(x, y) = 0 is equivalent to x = y d(x, y) = d(y, x) d(x, y) d(x, z) + d(z, y) is a metric is for all
January 29, 2013 Table of contents Metrics Metric Given a space X, then d : X X R + 0 and z in X if: d(x, y) = 0 is equivalent to x = y d(x, y) = d(y, x) d(x, y) d(x, z) + d(z, y) is a metric is for all
2. Review of Linear Algebra
 2. Review of Linear Algebra ECE 83, Spring 217 In this course we will represent signals as vectors and operators (e.g., filters, transforms, etc) as matrices. This lecture reviews basic concepts from linear
2. Review of Linear Algebra ECE 83, Spring 217 In this course we will represent signals as vectors and operators (e.g., filters, transforms, etc) as matrices. This lecture reviews basic concepts from linear
The Singular Value Decomposition
 The Singular Value Decomposition Philippe B. Laval KSU Fall 2015 Philippe B. Laval (KSU) SVD Fall 2015 1 / 13 Review of Key Concepts We review some key definitions and results about matrices that will
The Singular Value Decomposition Philippe B. Laval KSU Fall 2015 Philippe B. Laval (KSU) SVD Fall 2015 1 / 13 Review of Key Concepts We review some key definitions and results about matrices that will
Math 102, Winter Final Exam Review. Chapter 1. Matrices and Gaussian Elimination
 Math 0, Winter 07 Final Exam Review Chapter. Matrices and Gaussian Elimination { x + x =,. Different forms of a system of linear equations. Example: The x + 4x = 4. [ ] [ ] [ ] vector form (or the column
Math 0, Winter 07 Final Exam Review Chapter. Matrices and Gaussian Elimination { x + x =,. Different forms of a system of linear equations. Example: The x + 4x = 4. [ ] [ ] [ ] vector form (or the column
Applied Linear Algebra in Geoscience Using MATLAB
 Applied Linear Algebra in Geoscience Using MATLAB Contents Getting Started Creating Arrays Mathematical Operations with Arrays Using Script Files and Managing Data Two-Dimensional Plots Programming in
Applied Linear Algebra in Geoscience Using MATLAB Contents Getting Started Creating Arrays Mathematical Operations with Arrays Using Script Files and Managing Data Two-Dimensional Plots Programming in
Inner products. Theorem (basic properties): Given vectors u, v, w in an inner product space V, and a scalar k, the following properties hold:
: Given vectors u, v, w in an inner product space V, and a scalar k, the following properties hold:") Inner products Definition: An inner product on a real vector space V is an operation (function) that assigns to each pair of vectors ( u, v) in V a scalar u, v satisfying the following axioms: 1. u, v
Inner products Definition: An inner product on a real vector space V is an operation (function) that assigns to each pair of vectors ( u, v) in V a scalar u, v satisfying the following axioms: 1. u, v
Dimensionality Reduction: PCA. Nicholas Ruozzi University of Texas at Dallas
 Dimensionality Reduction: PCA Nicholas Ruozzi University of Texas at Dallas Eigenvalues λ is an eigenvalue of a matrix A R n n if the linear system Ax = λx has at least one non-zero solution If Ax = λx
Dimensionality Reduction: PCA Nicholas Ruozzi University of Texas at Dallas Eigenvalues λ is an eigenvalue of a matrix A R n n if the linear system Ax = λx has at least one non-zero solution If Ax = λx
Chapter 7: Symmetric Matrices and Quadratic Forms
 Chapter 7: Symmetric Matrices and Quadratic Forms (Last Updated: December, 06) These notes are derived primarily from Linear Algebra and its applications by David Lay (4ed). A few theorems have been moved
Chapter 7: Symmetric Matrices and Quadratic Forms (Last Updated: December, 06) These notes are derived primarily from Linear Algebra and its applications by David Lay (4ed). A few theorems have been moved
MATH 20F: LINEAR ALGEBRA LECTURE B00 (T. KEMP)
") MATH 20F: LINEAR ALGEBRA LECTURE B00 (T KEMP) Definition 01 If T (x) = Ax is a linear transformation from R n to R m then Nul (T ) = {x R n : T (x) = 0} = Nul (A) Ran (T ) = {Ax R m : x R n } = {b R m
MATH 20F: LINEAR ALGEBRA LECTURE B00 (T KEMP) Definition 01 If T (x) = Ax is a linear transformation from R n to R m then Nul (T ) = {x R n : T (x) = 0} = Nul (A) Ran (T ) = {Ax R m : x R n } = {b R m
Chapter 6 Inner product spaces
 Chapter 6 Inner product spaces 6.1 Inner products and norms Definition 1 Let V be a vector space over F. An inner product on V is a function, : V V F such that the following conditions hold. x+z,y = x,y
Chapter 6 Inner product spaces 6.1 Inner products and norms Definition 1 Let V be a vector space over F. An inner product on V is a function, : V V F such that the following conditions hold. x+z,y = x,y
Vector spaces. DS-GA 1013 / MATH-GA 2824 Optimization-based Data Analysis.
 Vector spaces DS-GA 1013 / MATH-GA 2824 Optimization-based Data Analysis http://www.cims.nyu.edu/~cfgranda/pages/obda_fall17/index.html Carlos Fernandez-Granda Vector space Consists of: A set V A scalar
Vector spaces DS-GA 1013 / MATH-GA 2824 Optimization-based Data Analysis http://www.cims.nyu.edu/~cfgranda/pages/obda_fall17/index.html Carlos Fernandez-Granda Vector space Consists of: A set V A scalar
Lecture 1: Review of linear algebra
 Lecture 1: Review of linear algebra Linear functions and linearization Inverse matrix, least-squares and least-norm solutions Subspaces, basis, and dimension Change of basis and similarity transformations
Lecture 1: Review of linear algebra Linear functions and linearization Inverse matrix, least-squares and least-norm solutions Subspaces, basis, and dimension Change of basis and similarity transformations
Ir O D = D = ( ) Section 2.6 Example 1. (Bottom of page 119) dim(v ) = dim(l(v, W )) = dim(v ) dim(f ) = dim(v )
 Section 2.6 Example 1. (Bottom of page 119) dim(v ) = dim(l(v, W )) = dim(v ) dim(f ) = dim(v )") Section 3.2 Theorem 3.6. Let A be an m n matrix of rank r. Then r m, r n, and, by means of a finite number of elementary row and column operations, A can be transformed into the matrix ( ) Ir O D = 1 O
Section 3.2 Theorem 3.6. Let A be an m n matrix of rank r. Then r m, r n, and, by means of a finite number of elementary row and column operations, A can be transformed into the matrix ( ) Ir O D = 1 O
Knowledge Discovery and Data Mining 1 (VO) ( )
 ( )") Knowledge Discovery and Data Mining 1 (VO) (707.003) Review of Linear Algebra Denis Helic KTI, TU Graz Oct 9, 2014 Denis Helic (KTI, TU Graz) KDDM1 Oct 9, 2014 1 / 74 Big picture: KDDM Probability Theory
Knowledge Discovery and Data Mining 1 (VO) (707.003) Review of Linear Algebra Denis Helic KTI, TU Graz Oct 9, 2014 Denis Helic (KTI, TU Graz) KDDM1 Oct 9, 2014 1 / 74 Big picture: KDDM Probability Theory
Review of Some Concepts from Linear Algebra: Part 2
 Review of Some Concepts from Linear Algebra: Part 2 Department of Mathematics Boise State University January 16, 2019 Math 566 Linear Algebra Review: Part 2 January 16, 2019 1 / 22 Vector spaces A set
Review of Some Concepts from Linear Algebra: Part 2 Department of Mathematics Boise State University January 16, 2019 Math 566 Linear Algebra Review: Part 2 January 16, 2019 1 / 22 Vector spaces A set
MATH 240 Spring, Chapter 1: Linear Equations and Matrices
 MATH 240 Spring, 2006 Chapter Summaries for Kolman / Hill, Elementary Linear Algebra, 8th Ed. Sections 1.1 1.6, 2.1 2.2, 3.2 3.8, 4.3 4.5, 5.1 5.3, 5.5, 6.1 6.5, 7.1 7.2, 7.4 DEFINITIONS Chapter 1: Linear
MATH 240 Spring, 2006 Chapter Summaries for Kolman / Hill, Elementary Linear Algebra, 8th Ed. Sections 1.1 1.6, 2.1 2.2, 3.2 3.8, 4.3 4.5, 5.1 5.3, 5.5, 6.1 6.5, 7.1 7.2, 7.4 DEFINITIONS Chapter 1: Linear
(a) If A is a 3 by 4 matrix, what does this tell us about its nullspace? Solution: dim N(A) 1, since rank(a) 3. Ax =
 If A is a 3 by 4 matrix, what does this tell us about its nullspace? Solution: dim N(A) 1, since rank(a) 3. Ax =") . (5 points) (a) If A is a 3 by 4 matrix, what does this tell us about its nullspace? dim N(A), since rank(a) 3. (b) If we also know that Ax = has no solution, what do we know about the rank of A? C(A)
. (5 points) (a) If A is a 3 by 4 matrix, what does this tell us about its nullspace? dim N(A), since rank(a) 3. (b) If we also know that Ax = has no solution, what do we know about the rank of A? C(A)
Properties of Matrices and Operations on Matrices
 Properties of Matrices and Operations on Matrices A common data structure for statistical analysis is a rectangular array or matris. Rows represent individual observational units, or just observations,
Properties of Matrices and Operations on Matrices A common data structure for statistical analysis is a rectangular array or matris. Rows represent individual observational units, or just observations,
COMP 558 lecture 18 Nov. 15, 2010
 Least squares We have seen several least squares problems thus far, and we will see more in the upcoming lectures. For this reason it is good to have a more general picture of these problems and how to
Least squares We have seen several least squares problems thus far, and we will see more in the upcoming lectures. For this reason it is good to have a more general picture of these problems and how to
Maths for Signals and Systems Linear Algebra in Engineering
 Maths for Signals and Systems Linear Algebra in Engineering Lectures 13 15, Tuesday 8 th and Friday 11 th November 016 DR TANIA STATHAKI READER (ASSOCIATE PROFFESOR) IN SIGNAL PROCESSING IMPERIAL COLLEGE
Maths for Signals and Systems Linear Algebra in Engineering Lectures 13 15, Tuesday 8 th and Friday 11 th November 016 DR TANIA STATHAKI READER (ASSOCIATE PROFFESOR) IN SIGNAL PROCESSING IMPERIAL COLLEGE
Elementary linear algebra
 Chapter 1 Elementary linear algebra 1.1 Vector spaces Vector spaces owe their importance to the fact that so many models arising in the solutions of specific problems turn out to be vector spaces. The
Chapter 1 Elementary linear algebra 1.1 Vector spaces Vector spaces owe their importance to the fact that so many models arising in the solutions of specific problems turn out to be vector spaces. The
Lecture 2: Linear Algebra Review
 EE 227A: Convex Optimization and Applications January 19 Lecture 2: Linear Algebra Review Lecturer: Mert Pilanci Reading assignment: Appendix C of BV. Sections 2-6 of the web textbook 1 2.1 Vectors 2.1.1
EE 227A: Convex Optimization and Applications January 19 Lecture 2: Linear Algebra Review Lecturer: Mert Pilanci Reading assignment: Appendix C of BV. Sections 2-6 of the web textbook 1 2.1 Vectors 2.1.1
Math Linear Algebra II. 1. Inner Products and Norms
 Math 342 - Linear Algebra II Notes 1. Inner Products and Norms One knows from a basic introduction to vectors in R n Math 254 at OSU) that the length of a vector x = x 1 x 2... x n ) T R n, denoted x,
Math 342 - Linear Algebra II Notes 1. Inner Products and Norms One knows from a basic introduction to vectors in R n Math 254 at OSU) that the length of a vector x = x 1 x 2... x n ) T R n, denoted x,
Positive Definite Matrix
 1/29 Chia-Ping Chen Professor Department of Computer Science and Engineering National Sun Yat-sen University Linear Algebra Positive Definite, Negative Definite, Indefinite 2/29 Pure Quadratic Function
1/29 Chia-Ping Chen Professor Department of Computer Science and Engineering National Sun Yat-sen University Linear Algebra Positive Definite, Negative Definite, Indefinite 2/29 Pure Quadratic Function
Lecture notes: Applied linear algebra Part 1. Version 2
 Lecture notes: Applied linear algebra Part 1. Version 2 Michael Karow Berlin University of Technology karow@math.tu-berlin.de October 2, 2008 1 Notation, basic notions and facts 1.1 Subspaces, range and
Lecture notes: Applied linear algebra Part 1. Version 2 Michael Karow Berlin University of Technology karow@math.tu-berlin.de October 2, 2008 1 Notation, basic notions and facts 1.1 Subspaces, range and
Typical Problem: Compute.
 Math 2040 Chapter 6 Orhtogonality and Least Squares 6.1 and some of 6.7: Inner Product, Length and Orthogonality. Definition: If x, y R n, then x y = x 1 y 1 +... + x n y n is the dot product of x and
Math 2040 Chapter 6 Orhtogonality and Least Squares 6.1 and some of 6.7: Inner Product, Length and Orthogonality. Definition: If x, y R n, then x y = x 1 y 1 +... + x n y n is the dot product of x and
MAT Linear Algebra Collection of sample exams
 MAT 342 - Linear Algebra Collection of sample exams A-x. (0 pts Give the precise definition of the row echelon form. 2. ( 0 pts After performing row reductions on the augmented matrix for a certain system
MAT 342 - Linear Algebra Collection of sample exams A-x. (0 pts Give the precise definition of the row echelon form. 2. ( 0 pts After performing row reductions on the augmented matrix for a certain system
Lecture Notes 1: Vector spaces
 Optimization-based data analysis Fall 2017 Lecture Notes 1: Vector spaces In this chapter we review certain basic concepts of linear algebra, highlighting their application to signal processing. 1 Vector
Optimization-based data analysis Fall 2017 Lecture Notes 1: Vector spaces In this chapter we review certain basic concepts of linear algebra, highlighting their application to signal processing. 1 Vector
There are two things that are particularly nice about the first basis
 Orthogonality and the Gram-Schmidt Process In Chapter 4, we spent a great deal of time studying the problem of finding a basis for a vector space We know that a basis for a vector space can potentially
Orthogonality and the Gram-Schmidt Process In Chapter 4, we spent a great deal of time studying the problem of finding a basis for a vector space We know that a basis for a vector space can potentially
CS 143 Linear Algebra Review
 CS 143 Linear Algebra Review Stefan Roth September 29, 2003 Introductory Remarks This review does not aim at mathematical rigor very much, but instead at ease of understanding and conciseness. Please see
CS 143 Linear Algebra Review Stefan Roth September 29, 2003 Introductory Remarks This review does not aim at mathematical rigor very much, but instead at ease of understanding and conciseness. Please see
Linear Algebra Primer
 Linear Algebra Primer David Doria daviddoria@gmail.com Wednesday 3 rd December, 2008 Contents Why is it called Linear Algebra? 4 2 What is a Matrix? 4 2. Input and Output.....................................
Linear Algebra Primer David Doria daviddoria@gmail.com Wednesday 3 rd December, 2008 Contents Why is it called Linear Algebra? 4 2 What is a Matrix? 4 2. Input and Output.....................................
Basic Calculus Review
 Basic Calculus Review Lorenzo Rosasco ISML Mod. 2 - Machine Learning Vector Spaces Functionals and Operators (Matrices) Vector Space A vector space is a set V with binary operations +: V V V and : R V
Basic Calculus Review Lorenzo Rosasco ISML Mod. 2 - Machine Learning Vector Spaces Functionals and Operators (Matrices) Vector Space A vector space is a set V with binary operations +: V V V and : R V
Linear Algebra. Paul Yiu. Department of Mathematics Florida Atlantic University. Fall A: Inner products
 Linear Algebra Paul Yiu Department of Mathematics Florida Atlantic University Fall 2011 6A: Inner products In this chapter, the field F = R or C. We regard F equipped with a conjugation χ : F F. If F =
Linear Algebra Paul Yiu Department of Mathematics Florida Atlantic University Fall 2011 6A: Inner products In this chapter, the field F = R or C. We regard F equipped with a conjugation χ : F F. If F =
5.) For each of the given sets of vectors, determine whether or not the set spans R 3. Give reasons for your answers.
 For each of the given sets of vectors, determine whether or not the set spans R 3. Give reasons for your answers.") Linear Algebra - Test File - Spring Test # For problems - consider the following system of equations. x + y - z = x + y + 4z = x + y + 6z =.) Solve the system without using your calculator..) Find the
Linear Algebra - Test File - Spring Test # For problems - consider the following system of equations. x + y - z = x + y + 4z = x + y + 6z =.) Solve the system without using your calculator..) Find the
Linear Algebra Review. Vectors
 Linear Algebra Review 9/4/7 Linear Algebra Review By Tim K. Marks UCSD Borrows heavily from: Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Virginia de Sa (UCSD) Cogsci 8F Linear Algebra review Vectors
Linear Algebra Review 9/4/7 Linear Algebra Review By Tim K. Marks UCSD Borrows heavily from: Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Virginia de Sa (UCSD) Cogsci 8F Linear Algebra review Vectors
Further Mathematical Methods (Linear Algebra)
") Further Mathematical Methods (Linear Algebra) Solutions For The Examination Question (a) To be an inner product on the real vector space V a function x y which maps vectors x y V to R must be such that:
Further Mathematical Methods (Linear Algebra) Solutions For The Examination Question (a) To be an inner product on the real vector space V a function x y which maps vectors x y V to R must be such that:
Functional Analysis Review
 Outline 9.520: Statistical Learning Theory and Applications February 8, 2010 Outline 1 2 3 4 Vector Space Outline A vector space is a set V with binary operations +: V V V and : R V V such that for all
Outline 9.520: Statistical Learning Theory and Applications February 8, 2010 Outline 1 2 3 4 Vector Space Outline A vector space is a set V with binary operations +: V V V and : R V V such that for all
1. General Vector Spaces
 1.1. Vector space axioms. 1. General Vector Spaces Definition 1.1. Let V be a nonempty set of objects on which the operations of addition and scalar multiplication are defined. By addition we mean a rule
1.1. Vector space axioms. 1. General Vector Spaces Definition 1.1. Let V be a nonempty set of objects on which the operations of addition and scalar multiplication are defined. By addition we mean a rule
Problem Set (T) If A is an m n matrix, B is an n p matrix and D is a p s matrix, then show
 If A is an m n matrix, B is an n p matrix and D is a p s matrix, then show") MTH 0: Linear Algebra Department of Mathematics and Statistics Indian Institute of Technology - Kanpur Problem Set Problems marked (T) are for discussions in Tutorial sessions (T) If A is an m n matrix,
MTH 0: Linear Algebra Department of Mathematics and Statistics Indian Institute of Technology - Kanpur Problem Set Problems marked (T) are for discussions in Tutorial sessions (T) If A is an m n matrix,
Notes on singular value decomposition for Math 54. Recall that if A is a symmetric n n matrix, then A has real eigenvalues A = P DP 1 A = P DP T.
 Notes on singular value decomposition for Math 54 Recall that if A is a symmetric n n matrix, then A has real eigenvalues λ 1,, λ n (possibly repeated), and R n has an orthonormal basis v 1,, v n, where
Notes on singular value decomposition for Math 54 Recall that if A is a symmetric n n matrix, then A has real eigenvalues λ 1,, λ n (possibly repeated), and R n has an orthonormal basis v 1,, v n, where
Math 520 Exam 2 Topic Outline Sections 1 3 (Xiao/Dumas/Liaw) Spring 2008
 Spring 2008") Math 520 Exam 2 Topic Outline Sections 1 3 (Xiao/Dumas/Liaw) Spring 2008 Exam 2 will be held on Tuesday, April 8, 7-8pm in 117 MacMillan What will be covered The exam will cover material from the lectures
Math 520 Exam 2 Topic Outline Sections 1 3 (Xiao/Dumas/Liaw) Spring 2008 Exam 2 will be held on Tuesday, April 8, 7-8pm in 117 MacMillan What will be covered The exam will cover material from the lectures
MATH 323 Linear Algebra Lecture 12: Basis of a vector space (continued). Rank and nullity of a matrix.
. Rank and nullity of a matrix.") MATH 323 Linear Algebra Lecture 12: Basis of a vector space (continued). Rank and nullity of a matrix. Basis Definition. Let V be a vector space. A linearly independent spanning set for V is called a basis.
MATH 323 Linear Algebra Lecture 12: Basis of a vector space (continued). Rank and nullity of a matrix. Basis Definition. Let V be a vector space. A linearly independent spanning set for V is called a basis.
Contents. Appendix D (Inner Product Spaces) W-51. Index W-63
 W-51. Index W-63") Contents Appendix D (Inner Product Spaces W-5 Index W-63 Inner city space W-49 W-5 Chapter : Appendix D Inner Product Spaces The inner product, taken of any two vectors in an arbitrary vector space, generalizes
Contents Appendix D (Inner Product Spaces W-5 Index W-63 Inner city space W-49 W-5 Chapter : Appendix D Inner Product Spaces The inner product, taken of any two vectors in an arbitrary vector space, generalizes
Quadratic forms. Here. Thus symmetric matrices are diagonalizable, and the diagonalization can be performed by means of an orthogonal matrix.
 Quadratic forms 1. Symmetric matrices An n n matrix (a ij ) n ij=1 with entries on R is called symmetric if A T, that is, if a ij = a ji for all 1 i, j n. We denote by S n (R) the set of all n n symmetric
Quadratic forms 1. Symmetric matrices An n n matrix (a ij ) n ij=1 with entries on R is called symmetric if A T, that is, if a ij = a ji for all 1 i, j n. We denote by S n (R) the set of all n n symmetric
Section 7.5 Inner Product Spaces
 Section 7.5 Inner Product Spaces With the dot product defined in Chapter 6, we were able to study the following properties of vectors in R n. ) Length or norm of a vector u. ( u = p u u ) 2) Distance of
Section 7.5 Inner Product Spaces With the dot product defined in Chapter 6, we were able to study the following properties of vectors in R n. ) Length or norm of a vector u. ( u = p u u ) 2) Distance of
Chapter 4 Euclid Space
 Chapter 4 Euclid Space Inner Product Spaces Definition.. Let V be a real vector space over IR. A real inner product on V is a real valued function on V V, denoted by (, ), which satisfies () (x, y) = (y,
Chapter 4 Euclid Space Inner Product Spaces Definition.. Let V be a real vector space over IR. A real inner product on V is a real valued function on V V, denoted by (, ), which satisfies () (x, y) = (y,
7. Symmetric Matrices and Quadratic Forms
 Linear Algebra 7. Symmetric Matrices and Quadratic Forms CSIE NCU 1 7. Symmetric Matrices and Quadratic Forms 7.1 Diagonalization of symmetric matrices 2 7.2 Quadratic forms.. 9 7.4 The singular value
Linear Algebra 7. Symmetric Matrices and Quadratic Forms CSIE NCU 1 7. Symmetric Matrices and Quadratic Forms 7.1 Diagonalization of symmetric matrices 2 7.2 Quadratic forms.. 9 7.4 The singular value
Review problems for MA 54, Fall 2004.
 Review problems for MA 54, Fall 2004. Below are the review problems for the final. They are mostly homework problems, or very similar. If you are comfortable doing these problems, you should be fine on
Review problems for MA 54, Fall 2004. Below are the review problems for the final. They are mostly homework problems, or very similar. If you are comfortable doing these problems, you should be fine on
Algebra II. Paulius Drungilas and Jonas Jankauskas
 Algebra II Paulius Drungilas and Jonas Jankauskas Contents 1. Quadratic forms 3 What is quadratic form? 3 Change of variables. 3 Equivalence of quadratic forms. 4 Canonical form. 4 Normal form. 7 Positive
Algebra II Paulius Drungilas and Jonas Jankauskas Contents 1. Quadratic forms 3 What is quadratic form? 3 Change of variables. 3 Equivalence of quadratic forms. 4 Canonical form. 4 Normal form. 7 Positive
Chapter 6: Orthogonality
 Chapter 6: Orthogonality (Last Updated: November 7, 7) These notes are derived primarily from Linear Algebra and its applications by David Lay (4ed). A few theorems have been moved around.. Inner products
Chapter 6: Orthogonality (Last Updated: November 7, 7) These notes are derived primarily from Linear Algebra and its applications by David Lay (4ed). A few theorems have been moved around.. Inner products
MATH 1120 (LINEAR ALGEBRA 1), FINAL EXAM FALL 2011 SOLUTIONS TO PRACTICE VERSION
, FINAL EXAM FALL 2011 SOLUTIONS TO PRACTICE VERSION") MATH (LINEAR ALGEBRA ) FINAL EXAM FALL SOLUTIONS TO PRACTICE VERSION Problem (a) For each matrix below (i) find a basis for its column space (ii) find a basis for its row space (iii) determine whether
MATH (LINEAR ALGEBRA ) FINAL EXAM FALL SOLUTIONS TO PRACTICE VERSION Problem (a) For each matrix below (i) find a basis for its column space (ii) find a basis for its row space (iii) determine whether
The following definition is fundamental.
 1. Some Basics from Linear Algebra With these notes, I will try and clarify certain topics that I only quickly mention in class. First and foremost, I will assume that you are familiar with many basic
1. Some Basics from Linear Algebra With these notes, I will try and clarify certain topics that I only quickly mention in class. First and foremost, I will assume that you are familiar with many basic
Math Camp Lecture 4: Linear Algebra. Xiao Yu Wang. Aug 2010 MIT. Xiao Yu Wang (MIT) Math Camp /10 1 / 88
 Math Camp /10 1 / 88") Math Camp 2010 Lecture 4: Linear Algebra Xiao Yu Wang MIT Aug 2010 Xiao Yu Wang (MIT) Math Camp 2010 08/10 1 / 88 Linear Algebra Game Plan Vector Spaces Linear Transformations and Matrices Determinant
Math Camp 2010 Lecture 4: Linear Algebra Xiao Yu Wang MIT Aug 2010 Xiao Yu Wang (MIT) Math Camp 2010 08/10 1 / 88 Linear Algebra Game Plan Vector Spaces Linear Transformations and Matrices Determinant
The Singular Value Decomposition (SVD) and Principal Component Analysis (PCA)
 and Principal Component Analysis (PCA)") Chapter 5 The Singular Value Decomposition (SVD) and Principal Component Analysis (PCA) 5.1 Basics of SVD 5.1.1 Review of Key Concepts We review some key definitions and results about matrices that will
Chapter 5 The Singular Value Decomposition (SVD) and Principal Component Analysis (PCA) 5.1 Basics of SVD 5.1.1 Review of Key Concepts We review some key definitions and results about matrices that will
STA141C: Big Data & High Performance Statistical Computing
 STA141C: Big Data & High Performance Statistical Computing Numerical Linear Algebra Background Cho-Jui Hsieh UC Davis May 15, 2018 Linear Algebra Background Vectors A vector has a direction and a magnitude
STA141C: Big Data & High Performance Statistical Computing Numerical Linear Algebra Background Cho-Jui Hsieh UC Davis May 15, 2018 Linear Algebra Background Vectors A vector has a direction and a magnitude
MATH 423 Linear Algebra II Lecture 28: Inner product spaces.
 MATH 423 Liner Algebr II Lecture 28: Inner product spces. Norm The notion of norm generlizes the notion of length of vector in R 3. Definition. Let V be vector spce over F, where F = R or C. A function
MATH 423 Liner Algebr II Lecture 28: Inner product spces. Norm The notion of norm generlizes the notion of length of vector in R 3. Definition. Let V be vector spce over F, where F = R or C. A function
Lecture 23: 6.1 Inner Products
 Lecture 23: 6.1 Inner Products Wei-Ta Chu 2008/12/17 Definition An inner product on a real vector space V is a function that associates a real number u, vwith each pair of vectors u and v in V in such
Lecture 23: 6.1 Inner Products Wei-Ta Chu 2008/12/17 Definition An inner product on a real vector space V is a function that associates a real number u, vwith each pair of vectors u and v in V in such
1. What is the determinant of the following matrix? a 1 a 2 4a 3 2a 2 b 1 b 2 4b 3 2b c 1. = 4, then det
 What is the determinant of the following matrix? 3 4 3 4 3 4 4 3 A 0 B 8 C 55 D 0 E 60 If det a a a 3 b b b 3 c c c 3 = 4, then det a a 4a 3 a b b 4b 3 b c c c 3 c = A 8 B 6 C 4 D E 3 Let A be an n n matrix
What is the determinant of the following matrix? 3 4 3 4 3 4 4 3 A 0 B 8 C 55 D 0 E 60 If det a a a 3 b b b 3 c c c 3 = 4, then det a a 4a 3 a b b 4b 3 b c c c 3 c = A 8 B 6 C 4 D E 3 Let A be an n n matrix
linearly indepedent eigenvectors as the multiplicity of the root, but in general there may be no more than one. For further discussion, assume matrice
 3. Eigenvalues and Eigenvectors, Spectral Representation 3.. Eigenvalues and Eigenvectors A vector ' is eigenvector of a matrix K, if K' is parallel to ' and ' 6, i.e., K' k' k is the eigenvalue. If is
3. Eigenvalues and Eigenvectors, Spectral Representation 3.. Eigenvalues and Eigenvectors A vector ' is eigenvector of a matrix K, if K' is parallel to ' and ' 6, i.e., K' k' k is the eigenvalue. If is
Finite-dimensional spaces. C n is the space of n-tuples x = (x 1,..., x n ) of complex numbers. It is a Hilbert space with the inner product
 of complex numbers. It is a Hilbert space with the inner product") Chapter 4 Hilbert Spaces 4.1 Inner Product Spaces Inner Product Space. A complex vector space E is called an inner product space (or a pre-hilbert space, or a unitary space) if there is a mapping (, )
Chapter 4 Hilbert Spaces 4.1 Inner Product Spaces Inner Product Space. A complex vector space E is called an inner product space (or a pre-hilbert space, or a unitary space) if there is a mapping (, )
MTH 2032 SemesterII
 MTH 202 SemesterII 2010-11 Linear Algebra Worked Examples Dr. Tony Yee Department of Mathematics and Information Technology The Hong Kong Institute of Education December 28, 2011 ii Contents Table of Contents
MTH 202 SemesterII 2010-11 Linear Algebra Worked Examples Dr. Tony Yee Department of Mathematics and Information Technology The Hong Kong Institute of Education December 28, 2011 ii Contents Table of Contents
Linear Algebra (Review) Volker Tresp 2017
 Volker Tresp 2017") Linear Algebra (Review) Volker Tresp 2017 1 Vectors k is a scalar (a number) c is a column vector. Thus in two dimensions, c = ( c1 c 2 ) (Advanced: More precisely, a vector is defined in a vector space.
Linear Algebra (Review) Volker Tresp 2017 1 Vectors k is a scalar (a number) c is a column vector. Thus in two dimensions, c = ( c1 c 2 ) (Advanced: More precisely, a vector is defined in a vector space.
MAT 610: Numerical Linear Algebra. James V. Lambers
 MAT 610: Numerical Linear Algebra James V Lambers January 16, 2017 2 Contents 1 Matrix Multiplication Problems 7 11 Introduction 7 111 Systems of Linear Equations 7 112 The Eigenvalue Problem 8 12 Basic
MAT 610: Numerical Linear Algebra James V Lambers January 16, 2017 2 Contents 1 Matrix Multiplication Problems 7 11 Introduction 7 111 Systems of Linear Equations 7 112 The Eigenvalue Problem 8 12 Basic
MATH 167: APPLIED LINEAR ALGEBRA Chapter 3
 MATH 167: APPLIED LINEAR ALGEBRA Chapter 3 Jesús De Loera, UC Davis February 18, 2012 Orthogonal Vectors and Subspaces (3.1). In real life vector spaces come with additional METRIC properties!! We have
MATH 167: APPLIED LINEAR ALGEBRA Chapter 3 Jesús De Loera, UC Davis February 18, 2012 Orthogonal Vectors and Subspaces (3.1). In real life vector spaces come with additional METRIC properties!! We have
Review of some mathematical tools
 MATHEMATICAL FOUNDATIONS OF SIGNAL PROCESSING Fall 2016 Benjamín Béjar Haro, Mihailo Kolundžija, Reza Parhizkar, Adam Scholefield Teaching assistants: Golnoosh Elhami, Hanjie Pan Review of some mathematical
MATHEMATICAL FOUNDATIONS OF SIGNAL PROCESSING Fall 2016 Benjamín Béjar Haro, Mihailo Kolundžija, Reza Parhizkar, Adam Scholefield Teaching assistants: Golnoosh Elhami, Hanjie Pan Review of some mathematical
Mathematics Department Stanford University Math 61CM/DM Inner products
 Mathematics Department Stanford University Math 61CM/DM Inner products Recall the definition of an inner product space; see Appendix A.8 of the textbook. Definition 1 An inner product space V is a vector
Mathematics Department Stanford University Math 61CM/DM Inner products Recall the definition of an inner product space; see Appendix A.8 of the textbook. Definition 1 An inner product space V is a vector
NORMS ON SPACE OF MATRICES
 NORMS ON SPACE OF MATRICES. Operator Norms on Space of linear maps Let A be an n n real matrix and x 0 be a vector in R n. We would like to use the Picard iteration method to solve for the following system
NORMS ON SPACE OF MATRICES. Operator Norms on Space of linear maps Let A be an n n real matrix and x 0 be a vector in R n. We would like to use the Picard iteration method to solve for the following system
LINEAR ALGEBRA REVIEW
 LINEAR ALGEBRA REVIEW JC Stuff you should know for the exam. 1. Basics on vector spaces (1) F n is the set of all n-tuples (a 1,... a n ) with a i F. It forms a VS with the operations of + and scalar multiplication
LINEAR ALGEBRA REVIEW JC Stuff you should know for the exam. 1. Basics on vector spaces (1) F n is the set of all n-tuples (a 1,... a n ) with a i F. It forms a VS with the operations of + and scalar multiplication
MATH 31 - ADDITIONAL PRACTICE PROBLEMS FOR FINAL
 MATH 3 - ADDITIONAL PRACTICE PROBLEMS FOR FINAL MAIN TOPICS FOR THE FINAL EXAM:. Vectors. Dot product. Cross product. Geometric applications. 2. Row reduction. Null space, column space, row space, left
MATH 3 - ADDITIONAL PRACTICE PROBLEMS FOR FINAL MAIN TOPICS FOR THE FINAL EXAM:. Vectors. Dot product. Cross product. Geometric applications. 2. Row reduction. Null space, column space, row space, left
. = V c = V [x]v (5.1) c 1. c k
![. = V c = V [x]v (5.1) c 1. c k](/thumbs/90/101201642.jpg ". = V c = V [x]v (5.1) c 1. c k") Chapter 5 Linear Algebra It can be argued that all of linear algebra can be understood using the four fundamental subspaces associated with a matrix Because they form the foundation on which we later work,
Chapter 5 Linear Algebra It can be argued that all of linear algebra can be understood using the four fundamental subspaces associated with a matrix Because they form the foundation on which we later work,
Conceptual Questions for Review
 Conceptual Questions for Review Chapter 1 1.1 Which vectors are linear combinations of v = (3, 1) and w = (4, 3)? 1.2 Compare the dot product of v = (3, 1) and w = (4, 3) to the product of their lengths.
Conceptual Questions for Review Chapter 1 1.1 Which vectors are linear combinations of v = (3, 1) and w = (4, 3)? 1.2 Compare the dot product of v = (3, 1) and w = (4, 3) to the product of their lengths.
CS 246 Review of Linear Algebra 01/17/19
 1 Linear algebra In this section we will discuss vectors and matrices. We denote the (i, j)th entry of a matrix A as A ij, and the ith entry of a vector as v i. 1.1 Vectors and vector operations A vector
1 Linear algebra In this section we will discuss vectors and matrices. We denote the (i, j)th entry of a matrix A as A ij, and the ith entry of a vector as v i. 1.1 Vectors and vector operations A vector
Lecture 3: Review of Linear Algebra
 ECE 83 Fall 2 Statistical Signal Processing instructor: R Nowak Lecture 3: Review of Linear Algebra Very often in this course we will represent signals as vectors and operators (eg, filters, transforms,
ECE 83 Fall 2 Statistical Signal Processing instructor: R Nowak Lecture 3: Review of Linear Algebra Very often in this course we will represent signals as vectors and operators (eg, filters, transforms,
2. Linear algebra. matrices and vectors. linear equations. range and nullspace of matrices. function of vectors, gradient and Hessian
 FE661 - Statistical Methods for Financial Engineering 2. Linear algebra Jitkomut Songsiri matrices and vectors linear equations range and nullspace of matrices function of vectors, gradient and Hessian
FE661 - Statistical Methods for Financial Engineering 2. Linear algebra Jitkomut Songsiri matrices and vectors linear equations range and nullspace of matrices function of vectors, gradient and Hessian
LINEAR ALGEBRA 1, 2012-I PARTIAL EXAM 3 SOLUTIONS TO PRACTICE PROBLEMS
 LINEAR ALGEBRA, -I PARTIAL EXAM SOLUTIONS TO PRACTICE PROBLEMS Problem (a) For each of the two matrices below, (i) determine whether it is diagonalizable, (ii) determine whether it is orthogonally diagonalizable,
LINEAR ALGEBRA, -I PARTIAL EXAM SOLUTIONS TO PRACTICE PROBLEMS Problem (a) For each of the two matrices below, (i) determine whether it is diagonalizable, (ii) determine whether it is orthogonally diagonalizable,
Definitions for Quizzes
 Definitions for Quizzes Italicized text (or something close to it) will be given to you. Plain text is (an example of) what you should write as a definition. [Bracketed text will not be given, nor does
Definitions for Quizzes Italicized text (or something close to it) will be given to you. Plain text is (an example of) what you should write as a definition. [Bracketed text will not be given, nor does
Lecture 3: Review of Linear Algebra
 ECE 83 Fall 2 Statistical Signal Processing instructor: R Nowak, scribe: R Nowak Lecture 3: Review of Linear Algebra Very often in this course we will represent signals as vectors and operators (eg, filters,
ECE 83 Fall 2 Statistical Signal Processing instructor: R Nowak, scribe: R Nowak Lecture 3: Review of Linear Algebra Very often in this course we will represent signals as vectors and operators (eg, filters,
Basic Elements of Linear Algebra
 A Basic Review of Linear Algebra Nick West nickwest@stanfordedu September 16, 2010 Part I Basic Elements of Linear Algebra Although the subject of linear algebra is much broader than just vectors and matrices,
A Basic Review of Linear Algebra Nick West nickwest@stanfordedu September 16, 2010 Part I Basic Elements of Linear Algebra Although the subject of linear algebra is much broader than just vectors and matrices,
Stat 159/259: Linear Algebra Notes
 Stat 159/259: Linear Algebra Notes Jarrod Millman November 16, 2015 Abstract These notes assume you ve taken a semester of undergraduate linear algebra. In particular, I assume you are familiar with the
Stat 159/259: Linear Algebra Notes Jarrod Millman November 16, 2015 Abstract These notes assume you ve taken a semester of undergraduate linear algebra. In particular, I assume you are familiar with the
Linear Algebra (Review) Volker Tresp 2018
 Volker Tresp 2018") Linear Algebra (Review) Volker Tresp 2018 1 Vectors k, M, N are scalars A one-dimensional array c is a column vector. Thus in two dimensions, ( ) c1 c = c 2 c i is the i-th component of c c T = (c 1, c
Linear Algebra (Review) Volker Tresp 2018 1 Vectors k, M, N are scalars A one-dimensional array c is a column vector. Thus in two dimensions, ( ) c1 c = c 2 c i is the i-th component of c c T = (c 1, c
Economics 204 Summer/Fall 2010 Lecture 10 Friday August 6, 2010
 Economics 204 Summer/Fall 2010 Lecture 10 Friday August 6, 2010 Diagonalization of Symmetric Real Matrices (from Handout Definition 1 Let δ ij = { 1 if i = j 0 if i j A basis V = {v 1,..., v n } of R n
Economics 204 Summer/Fall 2010 Lecture 10 Friday August 6, 2010 Diagonalization of Symmetric Real Matrices (from Handout Definition 1 Let δ ij = { 1 if i = j 0 if i j A basis V = {v 1,..., v n } of R n
IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET
 IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET This is a (not quite comprehensive) list of definitions and theorems given in Math 1553. Pay particular attention to the ones in red. Study Tip For each
IMPORTANT DEFINITIONS AND THEOREMS REFERENCE SHEET This is a (not quite comprehensive) list of definitions and theorems given in Math 1553. Pay particular attention to the ones in red. Study Tip For each
BASIC ALGORITHMS IN LINEAR ALGEBRA. Matrices and Applications of Gaussian Elimination. A 2 x. A T m x. A 1 x A T 1. A m x
 BASIC ALGORITHMS IN LINEAR ALGEBRA STEVEN DALE CUTKOSKY Matrices and Applications of Gaussian Elimination Systems of Equations Suppose that A is an n n matrix with coefficents in a field F, and x = (x,,
BASIC ALGORITHMS IN LINEAR ALGEBRA STEVEN DALE CUTKOSKY Matrices and Applications of Gaussian Elimination Systems of Equations Suppose that A is an n n matrix with coefficents in a field F, and x = (x,,
Computational math: Assignment 1
 Computational math: Assignment 1 Thanks Ting Gao for her Latex file 11 Let B be a 4 4 matrix to which we apply the following operations: 1double column 1, halve row 3, 3add row 3 to row 1, 4interchange
Computational math: Assignment 1 Thanks Ting Gao for her Latex file 11 Let B be a 4 4 matrix to which we apply the following operations: 1double column 1, halve row 3, 3add row 3 to row 1, 4interchange
MATH 431: FIRST MIDTERM. Thursday, October 3, 2013.
 MATH 431: FIRST MIDTERM Thursday, October 3, 213. (1) An inner product on the space of matrices. Let V be the vector space of 2 2 real matrices (that is, the algebra Mat 2 (R), but without the mulitiplicative
MATH 431: FIRST MIDTERM Thursday, October 3, 213. (1) An inner product on the space of matrices. Let V be the vector space of 2 2 real matrices (that is, the algebra Mat 2 (R), but without the mulitiplicative
The Singular Value Decomposition and Least Squares Problems
 The Singular Value Decomposition and Least Squares Problems Tom Lyche Centre of Mathematics for Applications, Department of Informatics, University of Oslo September 27, 2009 Applications of SVD solving
The Singular Value Decomposition and Least Squares Problems Tom Lyche Centre of Mathematics for Applications, Department of Informatics, University of Oslo September 27, 2009 Applications of SVD solving
1 Last time: least-squares problems
 MATH Linear algebra (Fall 07) Lecture Last time: least-squares problems Definition. If A is an m n matrix and b R m, then a least-squares solution to the linear system Ax = b is a vector x R n such that
MATH Linear algebra (Fall 07) Lecture Last time: least-squares problems Definition. If A is an m n matrix and b R m, then a least-squares solution to the linear system Ax = b is a vector x R n such that
Chapter 1. Preliminaries. The purpose of this chapter is to provide some basic background information. Linear Space. Hilbert Space.
 Chapter 1 Preliminaries The purpose of this chapter is to provide some basic background information. Linear Space Hilbert Space Basic Principles 1 2 Preliminaries Linear Space The notion of linear space
Chapter 1 Preliminaries The purpose of this chapter is to provide some basic background information. Linear Space Hilbert Space Basic Principles 1 2 Preliminaries Linear Space The notion of linear space
Glossary of Linear Algebra Terms. Prepared by Vince Zaccone For Campus Learning Assistance Services at UCSB
 Glossary of Linear Algebra Terms Basis (for a subspace) A linearly independent set of vectors that spans the space Basic Variable A variable in a linear system that corresponds to a pivot column in the
Glossary of Linear Algebra Terms Basis (for a subspace) A linearly independent set of vectors that spans the space Basic Variable A variable in a linear system that corresponds to a pivot column in the
1. Foundations of Numerics from Advanced Mathematics. Linear Algebra
 Foundations of Numerics from Advanced Mathematics Linear Algebra Linear Algebra, October 23, 22 Linear Algebra Mathematical Structures a mathematical structure consists of one or several sets and one or
Foundations of Numerics from Advanced Mathematics Linear Algebra Linear Algebra, October 23, 22 Linear Algebra Mathematical Structures a mathematical structure consists of one or several sets and one or
235 Final exam review questions
 5 Final exam review questions Paul Hacking December 4, 0 () Let A be an n n matrix and T : R n R n, T (x) = Ax the linear transformation with matrix A. What does it mean to say that a vector v R n is an
5 Final exam review questions Paul Hacking December 4, 0 () Let A be an n n matrix and T : R n R n, T (x) = Ax the linear transformation with matrix A. What does it mean to say that a vector v R n is an
Math 24 Spring 2012 Sample Homework Solutions Week 8
 Math 4 Spring Sample Homework Solutions Week 8 Section 5. (.) Test A M (R) for diagonalizability, and if possible find an invertible matrix Q and a diagonal matrix D such that Q AQ = D. ( ) 4 (c) A =.
Math 4 Spring Sample Homework Solutions Week 8 Section 5. (.) Test A M (R) for diagonalizability, and if possible find an invertible matrix Q and a diagonal matrix D such that Q AQ = D. ( ) 4 (c) A =.