EXCE, steepest descent, conjugate gradient & BFGS
|
|
|
- Emmeline Thompson
- 5 years ago
- Views:
Transcription






1 Club Cast3M, 21th of November 2008 An amazng optmsaton problem P. Pegon & Ph. Capéran European Laboratory for Structural Assessment Jont Research Centre Ispra, Italy
2 An amazng optmsaton problem OUTLINE: Background: some results from photogrammetry The (VERY) smplfed optmsaton problem EXCE, steepest descent, conjugate gradent & BFGS The Gauss-Newton method (+ new operator GANE) Conclusons, further works & bblography
3 An amazng optmsaton problem OUTLINE: Background: some results from photogrammetry The (VERY) smplfed optmsaton problem EXCE, steepest descent, conjugate gradent & BFGS The Gauss-Newton method (+ new operator GANE) Conclusons, further works & bblography
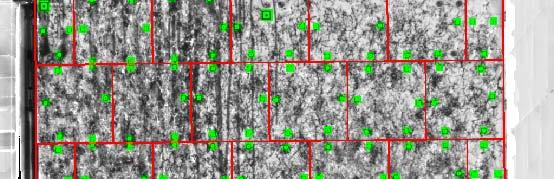
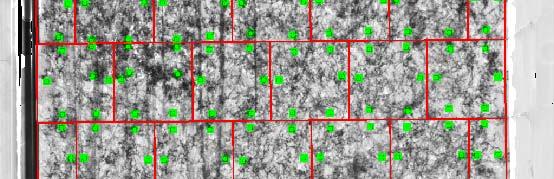

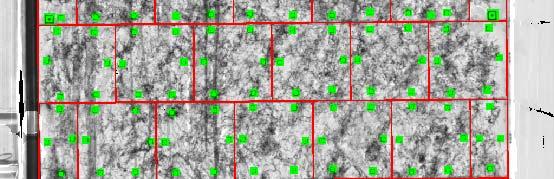
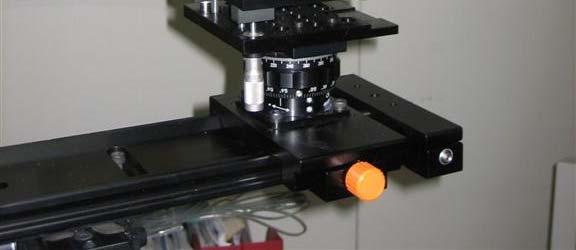

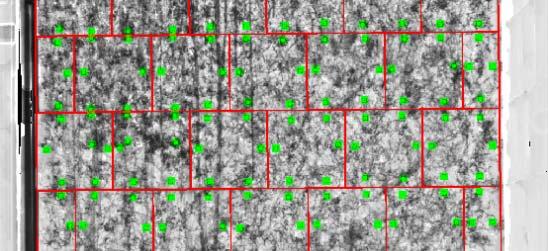
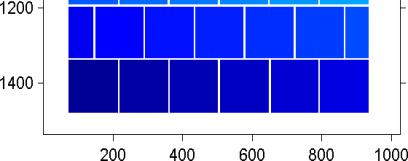
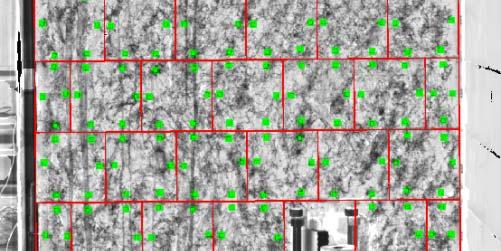
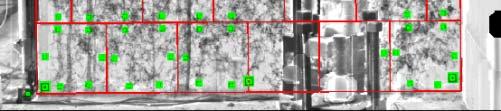
4 Background: some results from photogrammetry The structure ESECMASE The wall The camera 20cm 4096 grey levels, S/N 64 db, 1536x1024 pxels Kodak CCD KAF 1602E +-1.3mm/pxel
5 Background: some results from photogrammetry Intal t 0 Reference state Set of M nterpolaton functons on M reference sub-wndows Current t Current state Set of M current sub-wndows under trackng Gven one reference, C3 nterpolaton functon, W0 ( X ) Consder ts correspondng current dscrete functon ( ) wx C3 Analytc Template { P } { 1 n P + n } W0 ( T( xk ; P) ) T ( X; P ) parametrsed by jdjd { } Coordnate Transformaton P n Optmsaton on the Quadratc Error: k= 1.. K ( ( ) ( ( ))) 2 k 0 k P E( P) = w x ) W T x ; Wth respect to { } P n Trackng Method

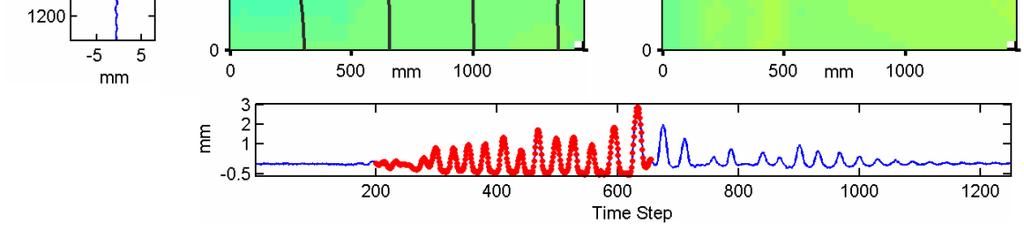
6 Background: some results from photogrammetry Comparson wth Hedenhan measurement (K g)
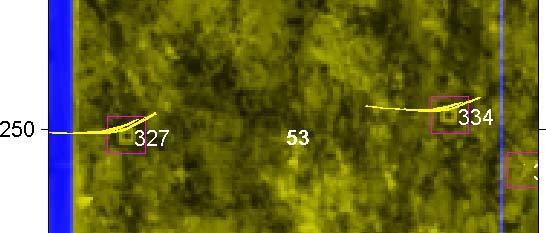
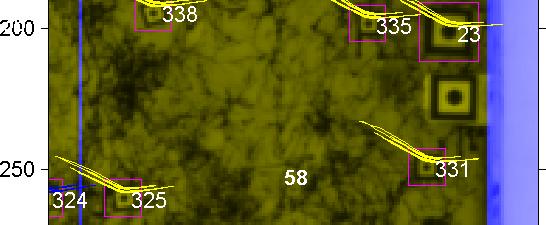
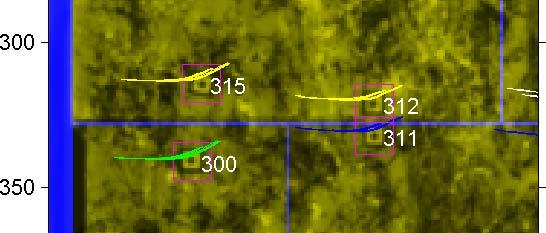
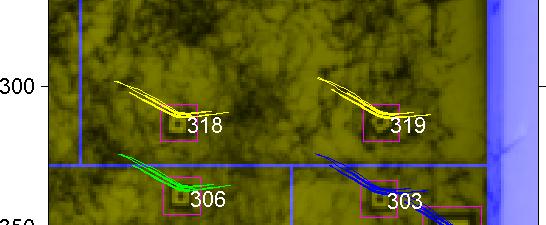

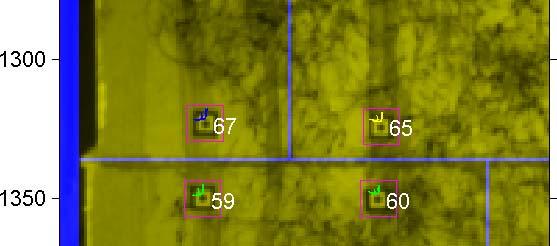
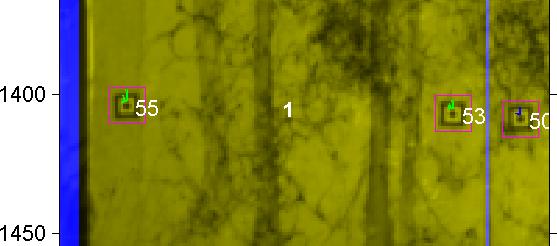
7 Dsplacement on targets Background: some results from photogrammetry

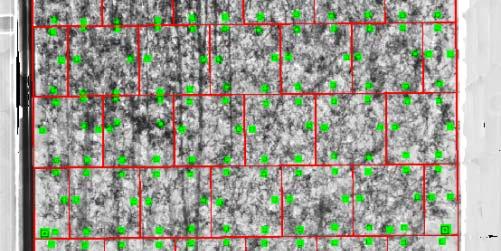



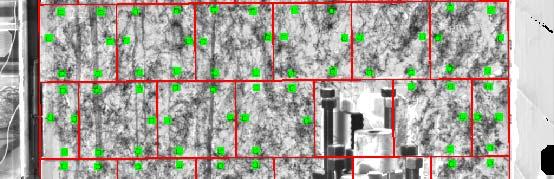
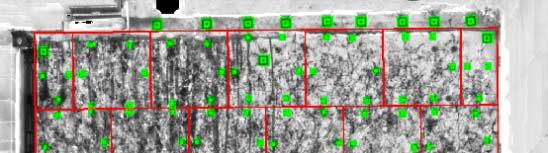
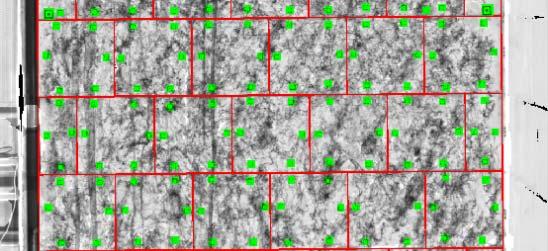
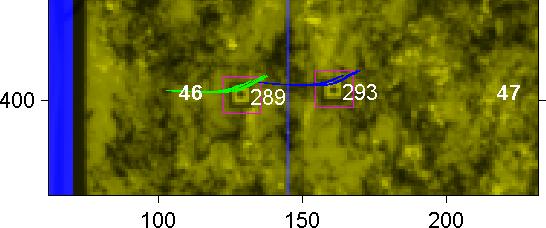
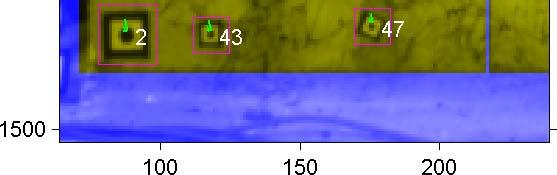
8 Dsplacement on texture Background: some results from photogrammetry
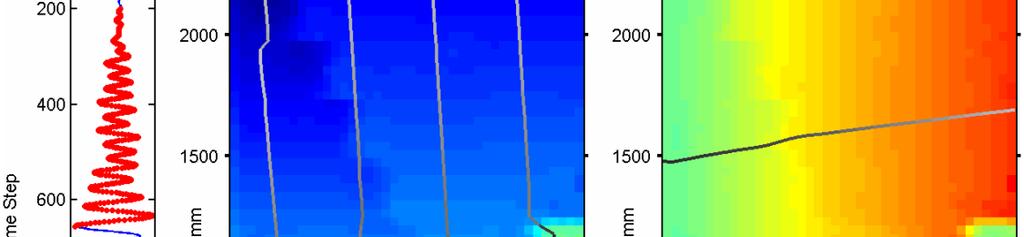
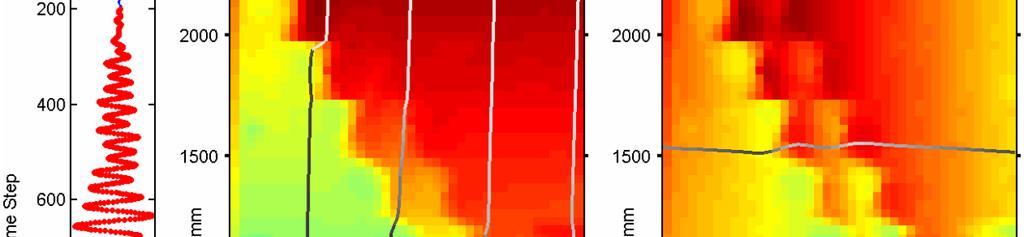
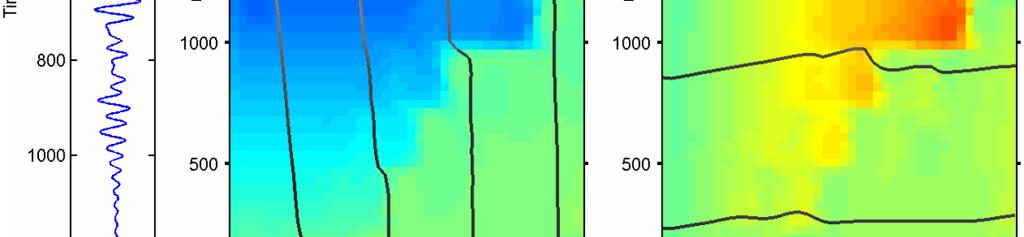
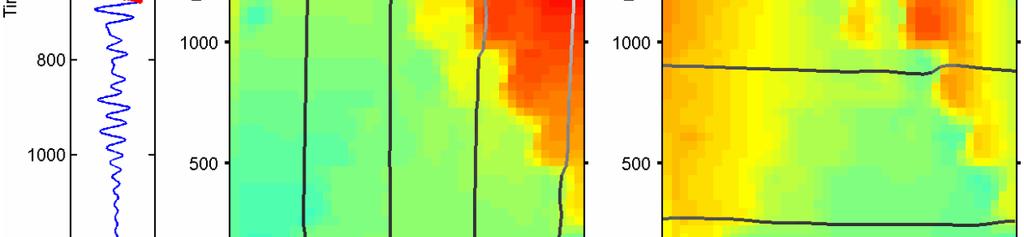
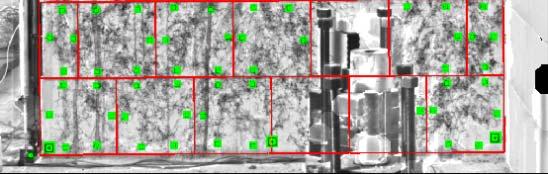
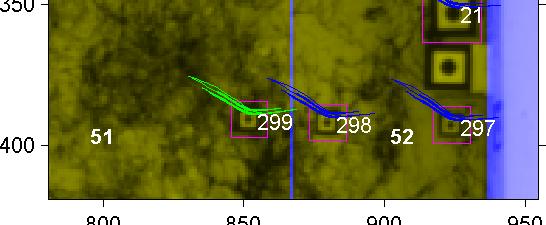
9 Background: some results from photogrammetry Dsplacement felds (K g)
10 An amazng optmsaton problem OUTLINE: Background: some results from photogrammetry The (VERY) smplfed optmsaton problem EXCE, steepest descent, conjugate gradent & BFGS The Gauss-Newton method (+ new operator GANE) Conclusons, further works & bblography





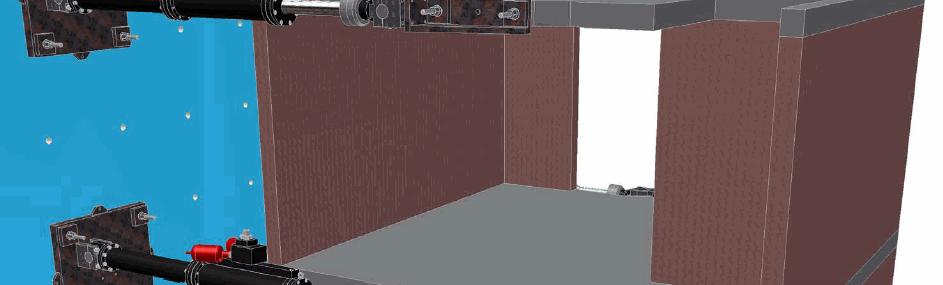
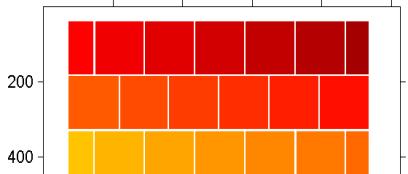
11 The (VERY) smplfed optmsaton problem In the elastc case 65 brcks E, = 1,...,65 ν = 0.3 Jonts E66 E66 E66 Kn =, Ks = e 2(1 e + ν ) Identfcaton of E???






12 The (VERY) smplfed optmsaton problem d s mposed d s measured d ( E ) E =1 1 σ ( E + ) = 5% The reference soluton s obtaned wth and
13 The (VERY) smplfed optmsaton problem Fnd E * { F E } argmn ( ) = E Where T ( ) ( ) ( ) F ( E ) = f E = f E f E ( ) + + f E = d( E) d ( E ) de ( ) = d( λe) (frst) problem!!!
14 The (VERY) smplfed optmsaton problem Numercal dervaton of the gradents F ( Ε ) FE ( 1,..., E + δ E,..., En ) FE ( 1,..., E δ E,..., En ) E 2δ E And also (later) f ( Ε ) f ( E 1,...,, E + δe,...,, E n) f( E 1,...,, E δe,...,, E n) E 2δ E
15 An amazng optmsaton problem OUTLINE: Background: some results from photogrammetry The (VERY) smplfed optmsaton problem EXCE, steepest descent, conjugate gradent & BFGS The Gauss-Newton method (+ new operator GANE) Conclusons, further works & bblography
16 EXCE, steepest descent, conjugate gradent & BFGS EXCE The EXCELL operator computes the mnmum of a functon F(X),the use method s the well-known MMA (Method of Movng Asymptotes) proposed by K.Svanberg. The purpose s to fnd the mnmum of a functon F(X) wth =1,N gven that : - the relatons Cj(X) < Cjmax (j>0 and j=1,m) must be satsfed - there are relatons on each unknown Xmn < X < Xmax The functons F and Cj are defned by the functon values and by ther dervatves at the startng pont X0. FE ( ), Cj( E )?????
17 EXCE, steepest descent, conjugate gradent & BFGS EXCE F( ( E ) = d ( E ) d + ( E + ) 1 st case 1 C ( E) = σ( E) σ ( E + ) < 0 C + + ( E ) = E E < 0, C ( E) = E E < nd case F( ( E ) = d ( E ) d + ( E + ) ( E) = σ( E) σ( E ) < 0, 2( E) = ( E E ) < ( E /100) 0 C C or F( E) = σ ( E) 3 rd case but no C ( E ) = d ( E ) d ( E ) / d ( E ) < convncng results
18 EXCE, steepest descent, conjugate gradent & BFGS Descent method: general format Descent drecton wth α T E E 0 d d F < E { F E α E } d = α > 0 + argmn ( ) Lne search Robust lne search??? E + = E +αe 1 d and loop on untl convergence Meanng of convergence??? E d Here we concentrate on!!!!!!!


19 EXCE, steepest descent, conjugate gradent & BFGS Steepest descent E st = F E d( E) d ( E ) / d ( E ) The convergence The convergence can be very slow!s

 g g 1")
 / d ( E ) Surprsngly slow")
20 EXCE, steepest descent, conjugate gradent & BFGS Conjugate gradent : the descent drectons are mutually orthogonal E = g + γ E g = F γ = 1 gc gc E 1 T ( g g ) g g 1 2 (wth precse lne search) d( E) d ( E ) / d ( E ) Surprsngly slow convergences



21 EXCE, steepest descent, conjugate gradent & BFGS BFGS: the Hessan matrx s teratvely constructed E = H F H = H bfgs bfgs E bfgs bfgs d( E) d ( E ) / d ( E ) BFGS=Broyden-Fletcher-Goldfarb-Shanno Surprsngly slow convergences
22 EXCE, steepest descent, conjugate gradent & BFGS Summary: Very slow convergence Hgh level asymptotc convergence plateau Concluson: we need to do better!
23 An amazng optmsaton problem OUTLINE: Background: some results from photogrammetry The (VERY) smplfed optmsaton problem EXCE, steepest descent, conjugate gradent & BFGS The Gauss-Newton method (+ new operator GANE) Conclusons, further works & bblography
24 The Gauss-Newton method (+ new operator GANE) Wrte the problem as a least square problem Fnd E * = x { F E } argmn ( ) Where m F( E) = f E = f E = f E f E ( ) ( ( )) 2 2 T ( ) ( ) ( ) = f E = d( E) d ( E ) and use t!
25 The Gauss-Newton method (+ new operator GANE) The Gauss-Newton Method Same cost as computng s F / Ej ( + δ ) ( ) + ( ) δ J( E) = ( E) f E E f E J E E Usng wth { } T E = argmn F( E+ δ E ) s gven by ( ) gn δ E j JJE gn f E j T = Jf= F Use E gn as a descent drecton Warnng: no ndetermnaton f the columns of are lnearly ndependent J
26 The Gauss-Newton method (+ new operator GANE) Operator GA(us-)NE(wton TAB2=GANE TAB1; CHPO1 RIGI1=GANE TAB1 'MATR'; Descrpton: The functon to mnmze s 2F(X)=f(X).f(X), and J(X)=df/dX The descent drecton s H soluton of: transpose(j)j H = -transpose(j)f Contents: TAB1 : Table of type 'VECTEUR' contanng TAB1. 0 = f(x) TAB1. 1 = df/dx1. TAB1. n = df/dxn CHPO1 : -transpose(j)f RIGI1 : transpose(j)j TAB2 : TABLE of type 'VECTEUR' contanng TAB2. 1 = H1. TAB2. n = Hn
 T ( JJ) s almost always rank 1 defcent (use of RESO ENSE ) 65 f f For nstance: = a ( a = 1")
 wth g E = a J 65 wth 66 65 E gn65 / Use GANE agan for fndng and complete wth E f f f = + a E E 65")
27 The Gauss-Newton method (+ new operator GANE) de ( ) = d ( λ E ) There s a second problem!!! (frst problem ) T ( JJ) s almost always rank 1 defcent (use of RESO ENSE ) 65 f f For nstance: = a ( a = 1 ( E66) for E = { 1} ) E E BUT 66 = 1 f GANE can be used to fnd out the a ( JJ T 65 65) a= J65 ) E 66 Assumng E = g( E ) wth g E = a J 65 wth E gn65 / Use GANE agan for fndng and complete wth E f f f = + a E E 65 E ae = gn66 gn = 1 66


 / d ( E ) wth")
28 The Gauss-Newton method (+ new operator GANE) And fnally! d( E) d ( E ) / d ( E ) wth max( E E + ) 10 7
 E + 66 ne +, n 1,2,4,8 66 = E = {")
 n = 1 n = 2 n = 3 n = 4 WARNING")
 10 E E +")
29 The Gauss-Newton method (+ new operator GANE) E + 66 ne +, n 1,2,4,8 66 = E = { 1} Substtutng wth (and stll startng from ) n = 1 n = 2 n = 3 n = 4 WARNING Sometmes RESO takes care tself of the ndetermnaton E + + E 7 max( ) 10 E E + E E wth
30 An amazng optmsaton problem OUTLINE: Background: some results from photogrammetry The (VERY) smplfed optmsaton problem EXCE, steepest descent, conjugate gradent & BFGS The Gauss-Newton method (+ new operator GANE) Conclusons, further works & bblography
31 Conclusons, further works & bblography Conclusons & further works Nothng s gven for free! Cast3M demonstrates agan ts ablty to help to understand (and solve) problems! Gauss-Newton s the root for other classcal methods Damped Gauss-Newton = Levenberg-Marquardt method T T (already n GANE) ( JJ+ μie ) = Jf= F Powell s Dog Leg Method Use of nosy expermental data lm Identfcaton of non-lnear models wth more refned meshes Lne search, convergence tests
32 Conclusons, further works & bblography Short bblography W.H. Press, S.A. Teukolsky, W.T. Vetterlng & B.P. Flannery, Numercal Recpes : The Art of Scentfc c Computng, 1986 H. Matths & G. Strang, The Soluton of Non-Lnear Fnte Element Equatons IJNME, 14, , 1626, 1979 K. Madsen, H.B. Nelsen & O. Tngleff Methods for Non-Lnear Least Squares Problems Techncal Unversty of Denmark, 2004 T. Charras & J. Kchenn L optmsaton dans CAST3M
IV. Performance Optimization
 IV. Performance Optmzaton A. Steepest descent algorthm defnton how to set up bounds on learnng rate mnmzaton n a lne (varyng learnng rate) momentum learnng examples B. Newton s method defnton Gauss-Newton
IV. Performance Optmzaton A. Steepest descent algorthm defnton how to set up bounds on learnng rate mnmzaton n a lne (varyng learnng rate) momentum learnng examples B. Newton s method defnton Gauss-Newton
Topic 5: Non-Linear Regression
 Topc 5: Non-Lnear Regresson The models we ve worked wth so far have been lnear n the parameters. They ve been of the form: y = Xβ + ε Many models based on economc theory are actually non-lnear n the parameters.
Topc 5: Non-Lnear Regresson The models we ve worked wth so far have been lnear n the parameters. They ve been of the form: y = Xβ + ε Many models based on economc theory are actually non-lnear n the parameters.
OPTIMISATION. Introduction Single Variable Unconstrained Optimisation Multivariable Unconstrained Optimisation Linear Programming
 OPTIMIATION Introducton ngle Varable Unconstraned Optmsaton Multvarable Unconstraned Optmsaton Lnear Programmng Chapter Optmsaton /. Introducton In an engneerng analss, sometmes etremtes, ether mnmum or
OPTIMIATION Introducton ngle Varable Unconstraned Optmsaton Multvarable Unconstraned Optmsaton Lnear Programmng Chapter Optmsaton /. Introducton In an engneerng analss, sometmes etremtes, ether mnmum or
Report on Image warping
 Report on Image warpng Xuan Ne, Dec. 20, 2004 Ths document summarzed the algorthms of our mage warpng soluton for further study, and there s a detaled descrpton about the mplementaton of these algorthms.
Report on Image warpng Xuan Ne, Dec. 20, 2004 Ths document summarzed the algorthms of our mage warpng soluton for further study, and there s a detaled descrpton about the mplementaton of these algorthms.
Lecture Notes on Linear Regression
 Lecture Notes on Lnear Regresson Feng L fl@sdueducn Shandong Unversty, Chna Lnear Regresson Problem In regresson problem, we am at predct a contnuous target value gven an nput feature vector We assume
Lecture Notes on Lnear Regresson Feng L fl@sdueducn Shandong Unversty, Chna Lnear Regresson Problem In regresson problem, we am at predct a contnuous target value gven an nput feature vector We assume
Convexity preserving interpolation by splines of arbitrary degree
 Computer Scence Journal of Moldova, vol.18, no.1(52), 2010 Convexty preservng nterpolaton by splnes of arbtrary degree Igor Verlan Abstract In the present paper an algorthm of C 2 nterpolaton of dscrete
Computer Scence Journal of Moldova, vol.18, no.1(52), 2010 Convexty preservng nterpolaton by splnes of arbtrary degree Igor Verlan Abstract In the present paper an algorthm of C 2 nterpolaton of dscrete
1 Matrix representations of canonical matrices
 1 Matrx representatons of canoncal matrces 2-d rotaton around the orgn: ( ) cos θ sn θ R 0 = sn θ cos θ 3-d rotaton around the x-axs: R x = 1 0 0 0 cos θ sn θ 0 sn θ cos θ 3-d rotaton around the y-axs:
1 Matrx representatons of canoncal matrces 2-d rotaton around the orgn: ( ) cos θ sn θ R 0 = sn θ cos θ 3-d rotaton around the x-axs: R x = 1 0 0 0 cos θ sn θ 0 sn θ cos θ 3-d rotaton around the y-axs:
CHAPTER 5 NUMERICAL EVALUATION OF DYNAMIC RESPONSE
 CHAPTER 5 NUMERICAL EVALUATION OF DYNAMIC RESPONSE Analytcal soluton s usually not possble when exctaton vares arbtrarly wth tme or f the system s nonlnear. Such problems can be solved by numercal tmesteppng
CHAPTER 5 NUMERICAL EVALUATION OF DYNAMIC RESPONSE Analytcal soluton s usually not possble when exctaton vares arbtrarly wth tme or f the system s nonlnear. Such problems can be solved by numercal tmesteppng
Solutions to exam in SF1811 Optimization, Jan 14, 2015
 Solutons to exam n SF8 Optmzaton, Jan 4, 25 3 3 O------O -4 \ / \ / The network: \/ where all lnks go from left to rght. /\ / \ / \ 6 O------O -5 2 4.(a) Let x = ( x 3, x 4, x 23, x 24 ) T, where the varable
Solutons to exam n SF8 Optmzaton, Jan 4, 25 3 3 O------O -4 \ / \ / The network: \/ where all lnks go from left to rght. /\ / \ / \ 6 O------O -5 2 4.(a) Let x = ( x 3, x 4, x 23, x 24 ) T, where the varable
Asymptotics of the Solution of a Boundary Value. Problem for One-Characteristic Differential. Equation Degenerating into a Parabolic Equation
 Nonl. Analyss and Dfferental Equatons, ol., 4, no., 5 - HIKARI Ltd, www.m-har.com http://dx.do.org/.988/nade.4.456 Asymptotcs of the Soluton of a Boundary alue Problem for One-Characterstc Dfferental Equaton
Nonl. Analyss and Dfferental Equatons, ol., 4, no., 5 - HIKARI Ltd, www.m-har.com http://dx.do.org/.988/nade.4.456 Asymptotcs of the Soluton of a Boundary alue Problem for One-Characterstc Dfferental Equaton
8.592J: Solutions for Assignment 7 Spring 2005
 8.59J: Solutons for Assgnment 7 Sprng 5 Problem 1 (a) A flament of length l can be created by addton of a monomer to one of length l 1 (at rate a) or removal of a monomer from a flament of length l + 1
8.59J: Solutons for Assgnment 7 Sprng 5 Problem 1 (a) A flament of length l can be created by addton of a monomer to one of length l 1 (at rate a) or removal of a monomer from a flament of length l + 1
Module 3: Element Properties Lecture 1: Natural Coordinates
 Module 3: Element Propertes Lecture : Natural Coordnates Natural coordnate system s bascally a local coordnate system whch allows the specfcaton of a pont wthn the element by a set of dmensonless numbers
Module 3: Element Propertes Lecture : Natural Coordnates Natural coordnate system s bascally a local coordnate system whch allows the specfcaton of a pont wthn the element by a set of dmensonless numbers
Body Models I-2. Gerard Pons-Moll and Bernt Schiele Max Planck Institute for Informatics
 Body Models I-2 Gerard Pons-Moll and Bernt Schele Max Planck Insttute for Informatcs December 18, 2017 What s mssng Gven correspondences, we can fnd the optmal rgd algnment wth Procrustes. PROBLEMS: How
Body Models I-2 Gerard Pons-Moll and Bernt Schele Max Planck Insttute for Informatcs December 18, 2017 What s mssng Gven correspondences, we can fnd the optmal rgd algnment wth Procrustes. PROBLEMS: How
Tracking with Kalman Filter
 Trackng wth Kalman Flter Scott T. Acton Vrgna Image and Vdeo Analyss (VIVA), Charles L. Brown Department of Electrcal and Computer Engneerng Department of Bomedcal Engneerng Unversty of Vrgna, Charlottesvlle,
Trackng wth Kalman Flter Scott T. Acton Vrgna Image and Vdeo Analyss (VIVA), Charles L. Brown Department of Electrcal and Computer Engneerng Department of Bomedcal Engneerng Unversty of Vrgna, Charlottesvlle,
Vector Norms. Chapter 7 Iterative Techniques in Matrix Algebra. Cauchy-Bunyakovsky-Schwarz Inequality for Sums. Distances. Convergence.
 Vector Norms Chapter 7 Iteratve Technques n Matrx Algebra Per-Olof Persson persson@berkeley.edu Department of Mathematcs Unversty of Calforna, Berkeley Math 128B Numercal Analyss Defnton A vector norm
Vector Norms Chapter 7 Iteratve Technques n Matrx Algebra Per-Olof Persson persson@berkeley.edu Department of Mathematcs Unversty of Calforna, Berkeley Math 128B Numercal Analyss Defnton A vector norm
MMA and GCMMA two methods for nonlinear optimization
 MMA and GCMMA two methods for nonlnear optmzaton Krster Svanberg Optmzaton and Systems Theory, KTH, Stockholm, Sweden. krlle@math.kth.se Ths note descrbes the algorthms used n the author s 2007 mplementatons
MMA and GCMMA two methods for nonlnear optmzaton Krster Svanberg Optmzaton and Systems Theory, KTH, Stockholm, Sweden. krlle@math.kth.se Ths note descrbes the algorthms used n the author s 2007 mplementatons
CIS526: Machine Learning Lecture 3 (Sept 16, 2003) Linear Regression. Preparation help: Xiaoying Huang. x 1 θ 1 output... θ M x M
 Linear Regression. Preparation help: Xiaoying Huang. x 1 θ 1 output... θ M x M") CIS56: achne Learnng Lecture 3 (Sept 6, 003) Preparaton help: Xaoyng Huang Lnear Regresson Lnear regresson can be represented by a functonal form: f(; θ) = θ 0 0 +θ + + θ = θ = 0 ote: 0 s a dummy attrbute
CIS56: achne Learnng Lecture 3 (Sept 6, 003) Preparaton help: Xaoyng Huang Lnear Regresson Lnear regresson can be represented by a functonal form: f(; θ) = θ 0 0 +θ + + θ = θ = 0 ote: 0 s a dummy attrbute
NUMERICAL DIFFERENTIATION
 NUMERICAL DIFFERENTIATION 1 Introducton Dfferentaton s a method to compute the rate at whch a dependent output y changes wth respect to the change n the ndependent nput x. Ths rate of change s called the
NUMERICAL DIFFERENTIATION 1 Introducton Dfferentaton s a method to compute the rate at whch a dependent output y changes wth respect to the change n the ndependent nput x. Ths rate of change s called the
A New Refinement of Jacobi Method for Solution of Linear System Equations AX=b
 Int J Contemp Math Scences, Vol 3, 28, no 17, 819-827 A New Refnement of Jacob Method for Soluton of Lnear System Equatons AX=b F Naem Dafchah Department of Mathematcs, Faculty of Scences Unversty of Gulan,
Int J Contemp Math Scences, Vol 3, 28, no 17, 819-827 A New Refnement of Jacob Method for Soluton of Lnear System Equatons AX=b F Naem Dafchah Department of Mathematcs, Faculty of Scences Unversty of Gulan,
coordinates. Then, the position vectors are described by
 Revewng, what we have dscussed so far: Generalzed coordnates Any number of varables (say, n) suffcent to specfy the confguraton of the system at each nstant to tme (need not be the mnmum number). In general,
Revewng, what we have dscussed so far: Generalzed coordnates Any number of varables (say, n) suffcent to specfy the confguraton of the system at each nstant to tme (need not be the mnmum number). In general,
Review of Taylor Series. Read Section 1.2
 Revew of Taylor Seres Read Secton 1.2 1 Power Seres A power seres about c s an nfnte seres of the form k = 0 k a ( x c) = a + a ( x c) + a ( x c) + a ( x c) k 2 3 0 1 2 3 + In many cases, c = 0, and the
Revew of Taylor Seres Read Secton 1.2 1 Power Seres A power seres about c s an nfnte seres of the form k = 0 k a ( x c) = a + a ( x c) + a ( x c) + a ( x c) k 2 3 0 1 2 3 + In many cases, c = 0, and the
= = = (a) Use the MATLAB command rref to solve the system. (b) Let A be the coefficient matrix and B be the right-hand side of the system.
 Use the MATLAB command rref to solve the system. (b) Let A be the coefficient matrix and B be the right-hand side of the system.") Chapter Matlab Exercses Chapter Matlab Exercses. Consder the lnear system of Example n Secton.. x x x y z y y z (a) Use the MATLAB command rref to solve the system. (b) Let A be the coeffcent matrx and
Chapter Matlab Exercses Chapter Matlab Exercses. Consder the lnear system of Example n Secton.. x x x y z y y z (a) Use the MATLAB command rref to solve the system. (b) Let A be the coeffcent matrx and
Erratum: A Generalized Path Integral Control Approach to Reinforcement Learning
 Journal of Machne Learnng Research 00-9 Submtted /0; Publshed 7/ Erratum: A Generalzed Path Integral Control Approach to Renforcement Learnng Evangelos ATheodorou Jonas Buchl Stefan Schaal Department of
Journal of Machne Learnng Research 00-9 Submtted /0; Publshed 7/ Erratum: A Generalzed Path Integral Control Approach to Renforcement Learnng Evangelos ATheodorou Jonas Buchl Stefan Schaal Department of
ELASTIC WAVE PROPAGATION IN A CONTINUOUS MEDIUM
 ELASTIC WAVE PROPAGATION IN A CONTINUOUS MEDIUM An elastc wave s a deformaton of the body that travels throughout the body n all drectons. We can examne the deformaton over a perod of tme by fxng our look
ELASTIC WAVE PROPAGATION IN A CONTINUOUS MEDIUM An elastc wave s a deformaton of the body that travels throughout the body n all drectons. We can examne the deformaton over a perod of tme by fxng our look
Inductance Calculation for Conductors of Arbitrary Shape
 CRYO/02/028 Aprl 5, 2002 Inductance Calculaton for Conductors of Arbtrary Shape L. Bottura Dstrbuton: Internal Summary In ths note we descrbe a method for the numercal calculaton of nductances among conductors
CRYO/02/028 Aprl 5, 2002 Inductance Calculaton for Conductors of Arbtrary Shape L. Bottura Dstrbuton: Internal Summary In ths note we descrbe a method for the numercal calculaton of nductances among conductors
APPENDIX A Some Linear Algebra
 APPENDIX A Some Lnear Algebra The collecton of m, n matrces A.1 Matrces a 1,1,..., a 1,n A = a m,1,..., a m,n wth real elements a,j s denoted by R m,n. If n = 1 then A s called a column vector. Smlarly,
APPENDIX A Some Lnear Algebra The collecton of m, n matrces A.1 Matrces a 1,1,..., a 1,n A = a m,1,..., a m,n wth real elements a,j s denoted by R m,n. If n = 1 then A s called a column vector. Smlarly,
( ) [ ( k) ( k) ( x) ( ) ( ) ( ) [ ] ξ [ ] [ ] [ ] ( )( ) i ( ) ( )( ) 2! ( ) = ( ) 3 Interpolation. Polynomial Approximation.
![( ) [ ( k) ( k) ( x) ( ) ( ) ( ) [ ] ξ [ ] [ ] [ ] ( )( ) i ( ) ( )( ) 2! ( ) = ( ) 3 Interpolation. Polynomial Approximation.](/thumbs/84/90601477.jpg "( ) [ ( k) ( k) ( x) ( ) ( ) ( ) [ ] ξ [ ] [ ] [ ] ( )( ) i ( ) ( )( ) 2! ( ) = ( ) 3 Interpolation. Polynomial Approximation.") 3 Interpolaton {( y } Gven:,,,,,, [ ] Fnd: y for some Mn, Ma Polynomal Appromaton Theorem (Weerstrass Appromaton Theorem --- estence ε [ ab] f( P( , then there ests a polynomal
3 Interpolaton {( y } Gven:,,,,,, [ ] Fnd: y for some Mn, Ma Polynomal Appromaton Theorem (Weerstrass Appromaton Theorem --- estence ε [ ab] f( P( , then there ests a polynomal
THE STURM-LIOUVILLE EIGENVALUE PROBLEM - A NUMERICAL SOLUTION USING THE CONTROL VOLUME METHOD
 Journal of Appled Mathematcs and Computatonal Mechancs 06, 5(), 7-36 www.amcm.pcz.pl p-iss 99-9965 DOI: 0.75/jamcm.06..4 e-iss 353-0588 THE STURM-LIOUVILLE EIGEVALUE PROBLEM - A UMERICAL SOLUTIO USIG THE
Journal of Appled Mathematcs and Computatonal Mechancs 06, 5(), 7-36 www.amcm.pcz.pl p-iss 99-9965 DOI: 0.75/jamcm.06..4 e-iss 353-0588 THE STURM-LIOUVILLE EIGEVALUE PROBLEM - A UMERICAL SOLUTIO USIG THE
Physics 5153 Classical Mechanics. D Alembert s Principle and The Lagrangian-1
 P. Guterrez Physcs 5153 Classcal Mechancs D Alembert s Prncple and The Lagrangan 1 Introducton The prncple of vrtual work provdes a method of solvng problems of statc equlbrum wthout havng to consder the
P. Guterrez Physcs 5153 Classcal Mechancs D Alembert s Prncple and The Lagrangan 1 Introducton The prncple of vrtual work provdes a method of solvng problems of statc equlbrum wthout havng to consder the
AERODYNAMICS I LECTURE 6 AERODYNAMICS OF A WING FUNDAMENTALS OF THE LIFTING-LINE THEORY
 LECTURE 6 AERODYNAMICS OF A WING FUNDAMENTALS OF THE LIFTING-LINE THEORY The Bot-Savart Law The velocty nduced by the sngular vortex lne wth the crculaton can be determned by means of the Bot- Savart formula
LECTURE 6 AERODYNAMICS OF A WING FUNDAMENTALS OF THE LIFTING-LINE THEORY The Bot-Savart Law The velocty nduced by the sngular vortex lne wth the crculaton can be determned by means of the Bot- Savart formula
8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS
 SECTION 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS 493 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS All the vector spaces you have studed thus far n the text are real vector spaces because the scalars
SECTION 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS 493 8.4 COMPLEX VECTOR SPACES AND INNER PRODUCTS All the vector spaces you have studed thus far n the text are real vector spaces because the scalars
Chapter Eight. Review and Summary. Two methods in solid mechanics ---- vectorial methods and energy methods or variational methods
 Chapter Eght Energy Method 8. Introducton 8. Stran energy expressons 8.3 Prncpal of statonary potental energy; several degrees of freedom ------ Castglano s frst theorem ---- Examples 8.4 Prncpal of statonary
Chapter Eght Energy Method 8. Introducton 8. Stran energy expressons 8.3 Prncpal of statonary potental energy; several degrees of freedom ------ Castglano s frst theorem ---- Examples 8.4 Prncpal of statonary
Multilayer Perceptron (MLP)
") Multlayer Perceptron (MLP) Seungjn Cho Department of Computer Scence and Engneerng Pohang Unversty of Scence and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjn@postech.ac.kr 1 / 20 Outlne
Multlayer Perceptron (MLP) Seungjn Cho Department of Computer Scence and Engneerng Pohang Unversty of Scence and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjn@postech.ac.kr 1 / 20 Outlne
The Two-scale Finite Element Errors Analysis for One Class of Thermoelastic Problem in Periodic Composites
 7 Asa-Pacfc Engneerng Technology Conference (APETC 7) ISBN: 978--6595-443- The Two-scale Fnte Element Errors Analyss for One Class of Thermoelastc Problem n Perodc Compostes Xaoun Deng Mngxang Deng ABSTRACT
7 Asa-Pacfc Engneerng Technology Conference (APETC 7) ISBN: 978--6595-443- The Two-scale Fnte Element Errors Analyss for One Class of Thermoelastc Problem n Perodc Compostes Xaoun Deng Mngxang Deng ABSTRACT
Mechanics Physics 151
 Mechancs Physcs 151 Lecture 3 Lagrange s Equatons (Goldsten Chapter 1) Hamlton s Prncple (Chapter 2) What We Dd Last Tme! Dscussed mult-partcle systems! Internal and external forces! Laws of acton and
Mechancs Physcs 151 Lecture 3 Lagrange s Equatons (Goldsten Chapter 1) Hamlton s Prncple (Chapter 2) What We Dd Last Tme! Dscussed mult-partcle systems! Internal and external forces! Laws of acton and
MAE140 - Linear Circuits - Fall 13 Midterm, October 31
 Instructons ME140 - Lnear Crcuts - Fall 13 Mdterm, October 31 () Ths exam s open book. You may use whatever wrtten materals you choose, ncludng your class notes and textbook. You may use a hand calculator
Instructons ME140 - Lnear Crcuts - Fall 13 Mdterm, October 31 () Ths exam s open book. You may use whatever wrtten materals you choose, ncludng your class notes and textbook. You may use a hand calculator
EEE 241: Linear Systems
 EEE : Lnear Systems Summary #: Backpropagaton BACKPROPAGATION The perceptron rule as well as the Wdrow Hoff learnng were desgned to tran sngle layer networks. They suffer from the same dsadvantage: they
EEE : Lnear Systems Summary #: Backpropagaton BACKPROPAGATION The perceptron rule as well as the Wdrow Hoff learnng were desgned to tran sngle layer networks. They suffer from the same dsadvantage: they
Solutions HW #2. minimize. Ax = b. Give the dual problem, and make the implicit equality constraints explicit. Solution.
 Solutons HW #2 Dual of general LP. Fnd the dual functon of the LP mnmze subject to c T x Gx h Ax = b. Gve the dual problem, and make the mplct equalty constrants explct. Soluton. 1. The Lagrangan s L(x,
Solutons HW #2 Dual of general LP. Fnd the dual functon of the LP mnmze subject to c T x Gx h Ax = b. Gve the dual problem, and make the mplct equalty constrants explct. Soluton. 1. The Lagrangan s L(x,
Georgia Tech PHYS 6124 Mathematical Methods of Physics I
 Georga Tech PHYS 624 Mathematcal Methods of Physcs I Instructor: Predrag Cvtanovć Fall semester 202 Homework Set #7 due October 30 202 == show all your work for maxmum credt == put labels ttle legends
Georga Tech PHYS 624 Mathematcal Methods of Physcs I Instructor: Predrag Cvtanovć Fall semester 202 Homework Set #7 due October 30 202 == show all your work for maxmum credt == put labels ttle legends
Chapter 12. Ordinary Differential Equation Boundary Value (BV) Problems
 Problems") Chapter. Ordnar Dfferental Equaton Boundar Value (BV) Problems In ths chapter we wll learn how to solve ODE boundar value problem. BV ODE s usuall gven wth x beng the ndependent space varable. p( x) q(
Chapter. Ordnar Dfferental Equaton Boundar Value (BV) Problems In ths chapter we wll learn how to solve ODE boundar value problem. BV ODE s usuall gven wth x beng the ndependent space varable. p( x) q(
Lorentz Group. Ling Fong Li. 1 Lorentz group Generators Simple representations... 3
 Lorentz Group Lng Fong L ontents Lorentz group. Generators............................................. Smple representatons..................................... 3 Lorentz group In the dervaton of Drac
Lorentz Group Lng Fong L ontents Lorentz group. Generators............................................. Smple representatons..................................... 3 Lorentz group In the dervaton of Drac
Finite Element Modelling of truss/cable structures
 Pet Schreurs Endhoven Unversty of echnology Department of Mechancal Engneerng Materals echnology November 3, 214 Fnte Element Modellng of truss/cable structures 1 Fnte Element Analyss of prestressed structures
Pet Schreurs Endhoven Unversty of echnology Department of Mechancal Engneerng Materals echnology November 3, 214 Fnte Element Modellng of truss/cable structures 1 Fnte Element Analyss of prestressed structures
Spin-rotation coupling of the angularly accelerated rigid body
 Spn-rotaton couplng of the angularly accelerated rgd body Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 E-mal: louaelzen@gmal.com November 1, 2017 All Rghts Reserved. Abstract Ths paper s
Spn-rotaton couplng of the angularly accelerated rgd body Loua Hassan Elzen Basher Khartoum, Sudan. Postal code:11123 E-mal: louaelzen@gmal.com November 1, 2017 All Rghts Reserved. Abstract Ths paper s
Linear Feature Engineering 11
 Lnear Feature Engneerng 11 2 Least-Squares 2.1 Smple least-squares Consder the followng dataset. We have a bunch of nputs x and correspondng outputs y. The partcular values n ths dataset are x y 0.23 0.19
Lnear Feature Engneerng 11 2 Least-Squares 2.1 Smple least-squares Consder the followng dataset. We have a bunch of nputs x and correspondng outputs y. The partcular values n ths dataset are x y 0.23 0.19
CSCI B609: Foundations of Data Science
 CSCI B609: Foundatons of Data Scence Lecture 13/14: Gradent Descent, Boostng and Learnng from Experts Sldes at http://grgory.us/data-scence-class.html Grgory Yaroslavtsev http://grgory.us Constraned Convex
CSCI B609: Foundatons of Data Scence Lecture 13/14: Gradent Descent, Boostng and Learnng from Experts Sldes at http://grgory.us/data-scence-class.html Grgory Yaroslavtsev http://grgory.us Constraned Convex
Solution of Linear System of Equations and Matrix Inversion Gauss Seidel Iteration Method
 Soluton of Lnear System of Equatons and Matr Inverson Gauss Sedel Iteraton Method It s another well-known teratve method for solvng a system of lnear equatons of the form a + a22 + + ann = b a2 + a222
Soluton of Lnear System of Equatons and Matr Inverson Gauss Sedel Iteraton Method It s another well-known teratve method for solvng a system of lnear equatons of the form a + a22 + + ann = b a2 + a222
New Method for Solving Poisson Equation. on Irregular Domains
 Appled Mathematcal Scences Vol. 6 01 no. 8 369 380 New Method for Solvng Posson Equaton on Irregular Domans J. Izadan and N. Karamooz Department of Mathematcs Facult of Scences Mashhad BranchIslamc Azad
Appled Mathematcal Scences Vol. 6 01 no. 8 369 380 New Method for Solvng Posson Equaton on Irregular Domans J. Izadan and N. Karamooz Department of Mathematcs Facult of Scences Mashhad BranchIslamc Azad
Review: Fit a line to N data points
 Revew: Ft a lne to data ponts Correlated parameters: L y = a x + b Orthogonal parameters: J y = a (x ˆ x + b For ntercept b, set a=0 and fnd b by optmal average: ˆ b = y, Var[ b ˆ ] = For slope a, set
Revew: Ft a lne to data ponts Correlated parameters: L y = a x + b Orthogonal parameters: J y = a (x ˆ x + b For ntercept b, set a=0 and fnd b by optmal average: ˆ b = y, Var[ b ˆ ] = For slope a, set
Snce h( q^; q) = hq ~ and h( p^ ; p) = hp, one can wrte ~ h hq hp = hq ~hp ~ (7) the uncertanty relaton for an arbtrary state. The states that mnmze t
 = hq ~ and h( p^ ; p) = hp, one can wrte ~ h hq hp = hq ~hp ~ (7) the uncertanty relaton for an arbtrary state. The states that mnmze t") 8.5: Many-body phenomena n condensed matter and atomc physcs Last moded: September, 003 Lecture. Squeezed States In ths lecture we shall contnue the dscusson of coherent states, focusng on ther propertes
8.5: Many-body phenomena n condensed matter and atomc physcs Last moded: September, 003 Lecture. Squeezed States In ths lecture we shall contnue the dscusson of coherent states, focusng on ther propertes
Professor Terje Haukaas University of British Columbia, Vancouver The Q4 Element
 Professor Terje Haukaas Unversty of Brtsh Columba, ancouver www.nrsk.ubc.ca The Q Element Ths document consders fnte elements that carry load only n ther plane. These elements are sometmes referred to
Professor Terje Haukaas Unversty of Brtsh Columba, ancouver www.nrsk.ubc.ca The Q Element Ths document consders fnte elements that carry load only n ther plane. These elements are sometmes referred to
Lecture 12: Discrete Laplacian
 Lecture 12: Dscrete Laplacan Scrbe: Tanye Lu Our goal s to come up wth a dscrete verson of Laplacan operator for trangulated surfaces, so that we can use t n practce to solve related problems We are mostly
Lecture 12: Dscrete Laplacan Scrbe: Tanye Lu Our goal s to come up wth a dscrete verson of Laplacan operator for trangulated surfaces, so that we can use t n practce to solve related problems We are mostly
Difference Equations
 Dfference Equatons c Jan Vrbk 1 Bascs Suppose a sequence of numbers, say a 0,a 1,a,a 3,... s defned by a certan general relatonshp between, say, three consecutve values of the sequence, e.g. a + +3a +1
Dfference Equatons c Jan Vrbk 1 Bascs Suppose a sequence of numbers, say a 0,a 1,a,a 3,... s defned by a certan general relatonshp between, say, three consecutve values of the sequence, e.g. a + +3a +1
Line Drawing and Clipping Week 1, Lecture 2
 CS 43 Computer Graphcs I Lne Drawng and Clppng Week, Lecture 2 Davd Breen, Wllam Regl and Maxm Peysakhov Geometrc and Intellgent Computng Laboratory Department of Computer Scence Drexel Unversty http://gcl.mcs.drexel.edu
CS 43 Computer Graphcs I Lne Drawng and Clppng Week, Lecture 2 Davd Breen, Wllam Regl and Maxm Peysakhov Geometrc and Intellgent Computng Laboratory Department of Computer Scence Drexel Unversty http://gcl.mcs.drexel.edu
Army Ants Tunneling for Classical Simulations
 Electronc Supplementary Materal (ESI) for Chemcal Scence. Ths journal s The Royal Socety of Chemstry 2014 electronc supplementary nformaton (ESI) for Chemcal Scence Army Ants Tunnelng for Classcal Smulatons
Electronc Supplementary Materal (ESI) for Chemcal Scence. Ths journal s The Royal Socety of Chemstry 2014 electronc supplementary nformaton (ESI) for Chemcal Scence Army Ants Tunnelng for Classcal Smulatons
Curve Fitting with the Least Square Method
 WIKI Document Number 5 Interpolaton wth Least Squares Curve Fttng wth the Least Square Method Mattheu Bultelle Department of Bo-Engneerng Imperal College, London Context We wsh to model the postve feedback
WIKI Document Number 5 Interpolaton wth Least Squares Curve Fttng wth the Least Square Method Mattheu Bultelle Department of Bo-Engneerng Imperal College, London Context We wsh to model the postve feedback
For now, let us focus on a specific model of neurons. These are simplified from reality but can achieve remarkable results.
 Neural Networks : Dervaton compled by Alvn Wan from Professor Jtendra Malk s lecture Ths type of computaton s called deep learnng and s the most popular method for many problems, such as computer vson
Neural Networks : Dervaton compled by Alvn Wan from Professor Jtendra Malk s lecture Ths type of computaton s called deep learnng and s the most popular method for many problems, such as computer vson
On the Interval Zoro Symmetric Single-step Procedure for Simultaneous Finding of Polynomial Zeros
 Appled Mathematcal Scences, Vol. 5, 2011, no. 75, 3693-3706 On the Interval Zoro Symmetrc Sngle-step Procedure for Smultaneous Fndng of Polynomal Zeros S. F. M. Rusl, M. Mons, M. A. Hassan and W. J. Leong
Appled Mathematcal Scences, Vol. 5, 2011, no. 75, 3693-3706 On the Interval Zoro Symmetrc Sngle-step Procedure for Smultaneous Fndng of Polynomal Zeros S. F. M. Rusl, M. Mons, M. A. Hassan and W. J. Leong
Numerical Heat and Mass Transfer
 Master degree n Mechancal Engneerng Numercal Heat and Mass Transfer 06-Fnte-Dfference Method (One-dmensonal, steady state heat conducton) Fausto Arpno f.arpno@uncas.t Introducton Why we use models and
Master degree n Mechancal Engneerng Numercal Heat and Mass Transfer 06-Fnte-Dfference Method (One-dmensonal, steady state heat conducton) Fausto Arpno f.arpno@uncas.t Introducton Why we use models and
Support Vector Machines
 Separatng boundary, defned by w Support Vector Machnes CISC 5800 Professor Danel Leeds Separatng hyperplane splts class 0 and class 1 Plane s defned by lne w perpendcular to plan Is data pont x n class
Separatng boundary, defned by w Support Vector Machnes CISC 5800 Professor Danel Leeds Separatng hyperplane splts class 0 and class 1 Plane s defned by lne w perpendcular to plan Is data pont x n class
Rigid body simulation
 Rgd bod smulaton Rgd bod smulaton Once we consder an object wth spacal etent, partcle sstem smulaton s no longer suffcent Problems Problems Unconstraned sstem rotatonal moton torques and angular momentum
Rgd bod smulaton Rgd bod smulaton Once we consder an object wth spacal etent, partcle sstem smulaton s no longer suffcent Problems Problems Unconstraned sstem rotatonal moton torques and angular momentum
Inexact Newton Methods for Inverse Eigenvalue Problems
 Inexact Newton Methods for Inverse Egenvalue Problems Zheng-jan Ba Abstract In ths paper, we survey some of the latest development n usng nexact Newton-lke methods for solvng nverse egenvalue problems.
Inexact Newton Methods for Inverse Egenvalue Problems Zheng-jan Ba Abstract In ths paper, we survey some of the latest development n usng nexact Newton-lke methods for solvng nverse egenvalue problems.
Salmon: Lectures on partial differential equations. Consider the general linear, second-order PDE in the form. ,x 2
 Salmon: Lectures on partal dfferental equatons 5. Classfcaton of second-order equatons There are general methods for classfyng hgher-order partal dfferental equatons. One s very general (applyng even to
Salmon: Lectures on partal dfferental equatons 5. Classfcaton of second-order equatons There are general methods for classfyng hgher-order partal dfferental equatons. One s very general (applyng even to
Lecture 6/7 (February 10/12, 2014) DIRAC EQUATION. The non-relativistic Schrödinger equation was obtained by noting that the Hamiltonian 2
 DIRAC EQUATION. The non-relativistic Schrödinger equation was obtained by noting that the Hamiltonian 2") P470 Lecture 6/7 (February 10/1, 014) DIRAC EQUATION The non-relatvstc Schrödnger equaton was obtaned by notng that the Hamltonan H = P (1) m can be transformed nto an operator form wth the substtutons
P470 Lecture 6/7 (February 10/1, 014) DIRAC EQUATION The non-relatvstc Schrödnger equaton was obtaned by notng that the Hamltonan H = P (1) m can be transformed nto an operator form wth the substtutons
STAT 309: MATHEMATICAL COMPUTATIONS I FALL 2018 LECTURE 16
 STAT 39: MATHEMATICAL COMPUTATIONS I FALL 218 LECTURE 16 1 why teratve methods f we have a lnear system Ax = b where A s very, very large but s ether sparse or structured (eg, banded, Toepltz, banded plus
STAT 39: MATHEMATICAL COMPUTATIONS I FALL 218 LECTURE 16 1 why teratve methods f we have a lnear system Ax = b where A s very, very large but s ether sparse or structured (eg, banded, Toepltz, banded plus
Some modelling aspects for the Matlab implementation of MMA
 Some modellng aspects for the Matlab mplementaton of MMA Krster Svanberg krlle@math.kth.se Optmzaton and Systems Theory Department of Mathematcs KTH, SE 10044 Stockholm September 2004 1. Consdered optmzaton
Some modellng aspects for the Matlab mplementaton of MMA Krster Svanberg krlle@math.kth.se Optmzaton and Systems Theory Department of Mathematcs KTH, SE 10044 Stockholm September 2004 1. Consdered optmzaton
MLE and Bayesian Estimation. Jie Tang Department of Computer Science & Technology Tsinghua University 2012
 MLE and Bayesan Estmaton Je Tang Department of Computer Scence & Technology Tsnghua Unversty 01 1 Lnear Regresson? As the frst step, we need to decde how we re gong to represent the functon f. One example:
MLE and Bayesan Estmaton Je Tang Department of Computer Scence & Technology Tsnghua Unversty 01 1 Lnear Regresson? As the frst step, we need to decde how we re gong to represent the functon f. One example:
CHAPTER 7 CONSTRAINED OPTIMIZATION 2: SQP AND GRG
 Chapter 7: Constraned Optmzaton CHAPER 7 CONSRAINED OPIMIZAION : SQP AND GRG Introducton In the prevous chapter we eamned the necessary and suffcent condtons for a constraned optmum. We dd not, however,
Chapter 7: Constraned Optmzaton CHAPER 7 CONSRAINED OPIMIZAION : SQP AND GRG Introducton In the prevous chapter we eamned the necessary and suffcent condtons for a constraned optmum. We dd not, however,
ALGORITHM FOR THE CALCULATION OF THE TWO VARIABLES CUBIC SPLINE FUNCTION
 ANALELE ŞTIINŢIFICE ALE UNIVERSITĂŢII AL.I. CUZA DIN IAŞI (S.N.) MATEMATICĂ, Tomul LIX, 013, f.1 DOI: 10.478/v10157-01-00-y ALGORITHM FOR THE CALCULATION OF THE TWO VARIABLES CUBIC SPLINE FUNCTION BY ION
ANALELE ŞTIINŢIFICE ALE UNIVERSITĂŢII AL.I. CUZA DIN IAŞI (S.N.) MATEMATICĂ, Tomul LIX, 013, f.1 DOI: 10.478/v10157-01-00-y ALGORITHM FOR THE CALCULATION OF THE TWO VARIABLES CUBIC SPLINE FUNCTION BY ION
b ), which stands for uniform distribution on the interval a x< b. = 0 elsewhere
, which stands for uniform distribution on the interval a x< b. = 0 elsewhere") Fall Analyss of Epermental Measurements B. Esensten/rev. S. Errede Some mportant probablty dstrbutons: Unform Bnomal Posson Gaussan/ormal The Unform dstrbuton s often called U( a, b ), hch stands for unform
Fall Analyss of Epermental Measurements B. Esensten/rev. S. Errede Some mportant probablty dstrbutons: Unform Bnomal Posson Gaussan/ormal The Unform dstrbuton s often called U( a, b ), hch stands for unform
5 The Rational Canonical Form
 5 The Ratonal Canoncal Form Here p s a monc rreducble factor of the mnmum polynomal m T and s not necessarly of degree one Let F p denote the feld constructed earler n the course, consstng of all matrces
5 The Ratonal Canoncal Form Here p s a monc rreducble factor of the mnmum polynomal m T and s not necessarly of degree one Let F p denote the feld constructed earler n the course, consstng of all matrces
The Second Anti-Mathima on Game Theory
 The Second Ant-Mathma on Game Theory Ath. Kehagas December 1 2006 1 Introducton In ths note we wll examne the noton of game equlbrum for three types of games 1. 2-player 2-acton zero-sum games 2. 2-player
The Second Ant-Mathma on Game Theory Ath. Kehagas December 1 2006 1 Introducton In ths note we wll examne the noton of game equlbrum for three types of games 1. 2-player 2-acton zero-sum games 2. 2-player
Lecture 2 Solution of Nonlinear Equations ( Root Finding Problems )
") Lecture Soluton o Nonlnear Equatons Root Fndng Problems Dentons Classcaton o Methods Analytcal Solutons Graphcal Methods Numercal Methods Bracketng Methods Open Methods Convergence Notatons Root Fndng
Lecture Soluton o Nonlnear Equatons Root Fndng Problems Dentons Classcaton o Methods Analytcal Solutons Graphcal Methods Numercal Methods Bracketng Methods Open Methods Convergence Notatons Root Fndng
A rapidly convergent descent method for minimization
 A rapdly convergent descent method for mnmzaton By R. Fletcher and M. J. D. Powell A powerful teratve descent method for fndng a local mnmum of a functon of several varables s descrbed. A number of theorems
A rapdly convergent descent method for mnmzaton By R. Fletcher and M. J. D. Powell A powerful teratve descent method for fndng a local mnmum of a functon of several varables s descrbed. A number of theorems
In this section is given an overview of the common elasticity models.
 Secton 4.1 4.1 Elastc Solds In ths secton s gven an overvew of the common elastcty models. 4.1.1 The Lnear Elastc Sold The classcal Lnear Elastc model, or Hooean model, has the followng lnear relatonshp
Secton 4.1 4.1 Elastc Solds In ths secton s gven an overvew of the common elastcty models. 4.1.1 The Lnear Elastc Sold The classcal Lnear Elastc model, or Hooean model, has the followng lnear relatonshp
Three views of mechanics
 Three vews of mechancs John Hubbard, n L. Gross s course February 1, 211 1 Introducton A mechancal system s manfold wth a Remannan metrc K : T M R called knetc energy and a functon V : M R called potental
Three vews of mechancs John Hubbard, n L. Gross s course February 1, 211 1 Introducton A mechancal system s manfold wth a Remannan metrc K : T M R called knetc energy and a functon V : M R called potental
8/25/17. Data Modeling. Data Modeling. Data Modeling. Patrice Koehl Department of Biological Sciences National University of Singapore
 8/5/17 Data Modelng Patrce Koehl Department of Bologcal Scences atonal Unversty of Sngapore http://www.cs.ucdavs.edu/~koehl/teachng/bl59 koehl@cs.ucdavs.edu Data Modelng Ø Data Modelng: least squares Ø
8/5/17 Data Modelng Patrce Koehl Department of Bologcal Scences atonal Unversty of Sngapore http://www.cs.ucdavs.edu/~koehl/teachng/bl59 koehl@cs.ucdavs.edu Data Modelng Ø Data Modelng: least squares Ø
CONTRAST ENHANCEMENT FOR MIMIMUM MEAN BRIGHTNESS ERROR FROM HISTOGRAM PARTITIONING INTRODUCTION
 CONTRAST ENHANCEMENT FOR MIMIMUM MEAN BRIGHTNESS ERROR FROM HISTOGRAM PARTITIONING N. Phanthuna 1,2, F. Cheevasuvt 2 and S. Chtwong 2 1 Department of Electrcal Engneerng, Faculty of Engneerng Rajamangala
CONTRAST ENHANCEMENT FOR MIMIMUM MEAN BRIGHTNESS ERROR FROM HISTOGRAM PARTITIONING N. Phanthuna 1,2, F. Cheevasuvt 2 and S. Chtwong 2 1 Department of Electrcal Engneerng, Faculty of Engneerng Rajamangala
Quantum Mechanics I - Session 4
 Quantum Mechancs I - Sesson 4 Aprl 3, 05 Contents Operators Change of Bass 4 3 Egenvectors and Egenvalues 5 3. Denton....................................... 5 3. Rotaton n D....................................
Quantum Mechancs I - Sesson 4 Aprl 3, 05 Contents Operators Change of Bass 4 3 Egenvectors and Egenvalues 5 3. Denton....................................... 5 3. Rotaton n D....................................
n α j x j = 0 j=1 has a nontrivial solution. Here A is the n k matrix whose jth column is the vector for all t j=0
 MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
Feature Selection: Part 1
 CSE 546: Machne Learnng Lecture 5 Feature Selecton: Part 1 Instructor: Sham Kakade 1 Regresson n the hgh dmensonal settng How do we learn when the number of features d s greater than the sample sze n?
CSE 546: Machne Learnng Lecture 5 Feature Selecton: Part 1 Instructor: Sham Kakade 1 Regresson n the hgh dmensonal settng How do we learn when the number of features d s greater than the sample sze n?
: Numerical Analysis Topic 2: Solution of Nonlinear Equations Lectures 5-11:
 764: Numercal Analyss Topc : Soluton o Nonlnear Equatons Lectures 5-: UIN Malang Read Chapters 5 and 6 o the tetbook 764_Topc Lecture 5 Soluton o Nonlnear Equatons Root Fndng Problems Dentons Classcaton
764: Numercal Analyss Topc : Soluton o Nonlnear Equatons Lectures 5-: UIN Malang Read Chapters 5 and 6 o the tetbook 764_Topc Lecture 5 Soluton o Nonlnear Equatons Root Fndng Problems Dentons Classcaton
Finite Element Solution Algorithm for Nonlinear Elasticity Problems by Domain Decomposition Method
 Fnte Element Soluton Algorthm for Nonlnear Elastcty Problems by Doman Decomposton Method Bedřch Sousedík Department of Mathematcs, Faculty of Cvl Engneerng, Czech Techncal Unversty n Prague, Thákurova
Fnte Element Soluton Algorthm for Nonlnear Elastcty Problems by Doman Decomposton Method Bedřch Sousedík Department of Mathematcs, Faculty of Cvl Engneerng, Czech Techncal Unversty n Prague, Thákurova
p 1 c 2 + p 2 c 2 + p 3 c p m c 2
 Where to put a faclty? Gven locatons p 1,..., p m n R n of m houses, want to choose a locaton c n R n for the fre staton. Want c to be as close as possble to all the house. We know how to measure dstance
Where to put a faclty? Gven locatons p 1,..., p m n R n of m houses, want to choose a locaton c n R n for the fre staton. Want c to be as close as possble to all the house. We know how to measure dstance
One Dimension Again. Chapter Fourteen
 hapter Fourteen One Dmenson Agan 4 Scalar Lne Integrals Now we agan consder the dea of the ntegral n one dmenson When we were ntroduced to the ntegral back n elementary school, we consdered only functons
hapter Fourteen One Dmenson Agan 4 Scalar Lne Integrals Now we agan consder the dea of the ntegral n one dmenson When we were ntroduced to the ntegral back n elementary school, we consdered only functons
SIO 224. m(r) =(ρ(r),k s (r),µ(r))
 =(ρ(r),k s (r),µ(r))") SIO 224 1. A bref look at resoluton analyss Here s some background for the Masters and Gubbns resoluton paper. Global Earth models are usually found teratvely by assumng a startng model and fndng small
SIO 224 1. A bref look at resoluton analyss Here s some background for the Masters and Gubbns resoluton paper. Global Earth models are usually found teratvely by assumng a startng model and fndng small
4DVAR, according to the name, is a four-dimensional variational method.
 4D-Varatonal Data Assmlaton (4D-Var) 4DVAR, accordng to the name, s a four-dmensonal varatonal method. 4D-Var s actually a drect generalzaton of 3D-Var to handle observatons that are dstrbuted n tme. The
4D-Varatonal Data Assmlaton (4D-Var) 4DVAR, accordng to the name, s a four-dmensonal varatonal method. 4D-Var s actually a drect generalzaton of 3D-Var to handle observatons that are dstrbuted n tme. The
Adjoint Methods of Sensitivity Analysis for Lyapunov Equation. Boping Wang 1, Kun Yan 2. University of Technology, Dalian , P. R.
 th World Congress on Structural and Multdscplnary Optmsaton 7 th - th, June 5, Sydney Australa Adjont Methods of Senstvty Analyss for Lyapunov Equaton Bopng Wang, Kun Yan Department of Mechancal and Aerospace
th World Congress on Structural and Multdscplnary Optmsaton 7 th - th, June 5, Sydney Australa Adjont Methods of Senstvty Analyss for Lyapunov Equaton Bopng Wang, Kun Yan Department of Mechancal and Aerospace
Lecture 2: Numerical Methods for Differentiations and Integrations
 Numercal Smulaton of Space Plasmas (I [AP-4036] Lecture 2 by Lng-Hsao Lyu March, 2018 Lecture 2: Numercal Methods for Dfferentatons and Integratons As we have dscussed n Lecture 1 that numercal smulaton
Numercal Smulaton of Space Plasmas (I [AP-4036] Lecture 2 by Lng-Hsao Lyu March, 2018 Lecture 2: Numercal Methods for Dfferentatons and Integratons As we have dscussed n Lecture 1 that numercal smulaton
UNIT 3 EXPRESSIONS AND EQUATIONS Lesson 4: Fundamental Theorem of Algebra. Instruction. Guided Practice Example 1
 Guded Practce 3.4. Example 1 Instructon For each equaton, state the number and type of solutons by frst fndng the dscrmnant. x + 3x =.4x x = 3x = x 9x + 1 = 6x 1. Fnd the dscrmnant of x + 3x =. The equaton
Guded Practce 3.4. Example 1 Instructon For each equaton, state the number and type of solutons by frst fndng the dscrmnant. x + 3x =.4x x = 3x = x 9x + 1 = 6x 1. Fnd the dscrmnant of x + 3x =. The equaton
Singular Value Decomposition: Theory and Applications
 Sngular Value Decomposton: Theory and Applcatons Danel Khashab Sprng 2015 Last Update: March 2, 2015 1 Introducton A = UDV where columns of U and V are orthonormal and matrx D s dagonal wth postve real
Sngular Value Decomposton: Theory and Applcatons Danel Khashab Sprng 2015 Last Update: March 2, 2015 1 Introducton A = UDV where columns of U and V are orthonormal and matrx D s dagonal wth postve real
Lecture Note 3. Eshelby s Inclusion II
 ME340B Elastcty of Mcroscopc Structures Stanford Unversty Wnter 004 Lecture Note 3. Eshelby s Incluson II Chrs Wenberger and We Ca c All rghts reserved January 6, 004 Contents 1 Incluson energy n an nfnte
ME340B Elastcty of Mcroscopc Structures Stanford Unversty Wnter 004 Lecture Note 3. Eshelby s Incluson II Chrs Wenberger and We Ca c All rghts reserved January 6, 004 Contents 1 Incluson energy n an nfnte
9 Characteristic classes
 THEODORE VORONOV DIFFERENTIAL GEOMETRY. Sprng 2009 [under constructon] 9 Characterstc classes 9.1 The frst Chern class of a lne bundle Consder a complex vector bundle E B of rank p. We shall construct
THEODORE VORONOV DIFFERENTIAL GEOMETRY. Sprng 2009 [under constructon] 9 Characterstc classes 9.1 The frst Chern class of a lne bundle Consder a complex vector bundle E B of rank p. We shall construct
Chapter 5. Solution of System of Linear Equations. Module No. 6. Solution of Inconsistent and Ill Conditioned Systems
 Numercal Analyss by Dr. Anta Pal Assstant Professor Department of Mathematcs Natonal Insttute of Technology Durgapur Durgapur-713209 emal: anta.bue@gmal.com 1 . Chapter 5 Soluton of System of Lnear Equatons
Numercal Analyss by Dr. Anta Pal Assstant Professor Department of Mathematcs Natonal Insttute of Technology Durgapur Durgapur-713209 emal: anta.bue@gmal.com 1 . Chapter 5 Soluton of System of Lnear Equatons
The Geometry of Logit and Probit
 The Geometry of Logt and Probt Ths short note s meant as a supplement to Chapters and 3 of Spatal Models of Parlamentary Votng and the notaton and reference to fgures n the text below s to those two chapters.
The Geometry of Logt and Probt Ths short note s meant as a supplement to Chapters and 3 of Spatal Models of Parlamentary Votng and the notaton and reference to fgures n the text below s to those two chapters.
MATH 5707 HOMEWORK 4 SOLUTIONS 2. 2 i 2p i E(X i ) + E(Xi 2 ) ä i=1. i=1
 + E(Xi 2 ) ä i=1. i=1") MATH 5707 HOMEWORK 4 SOLUTIONS CİHAN BAHRAN 1. Let v 1,..., v n R m, all lengths v are not larger than 1. Let p 1,..., p n [0, 1] be arbtrary and set w = p 1 v 1 + + p n v n. Then there exst ε 1,..., ε
MATH 5707 HOMEWORK 4 SOLUTIONS CİHAN BAHRAN 1. Let v 1,..., v n R m, all lengths v are not larger than 1. Let p 1,..., p n [0, 1] be arbtrary and set w = p 1 v 1 + + p n v n. Then there exst ε 1,..., ε
Some Comments on Accelerating Convergence of Iterative Sequences Using Direct Inversion of the Iterative Subspace (DIIS)
") Some Comments on Acceleratng Convergence of Iteratve Sequences Usng Drect Inverson of the Iteratve Subspace (DIIS) C. Davd Sherrll School of Chemstry and Bochemstry Georga Insttute of Technology May 1998
Some Comments on Acceleratng Convergence of Iteratve Sequences Usng Drect Inverson of the Iteratve Subspace (DIIS) C. Davd Sherrll School of Chemstry and Bochemstry Georga Insttute of Technology May 1998
2.29 Numerical Fluid Mechanics
 REVIEW Lecture 10: Sprng 2015 Lecture 11 Classfcaton of Partal Dfferental Equatons PDEs) and eamples wth fnte dfference dscretzatons Parabolc PDEs Ellptc PDEs Hyperbolc PDEs Error Types and Dscretzaton
REVIEW Lecture 10: Sprng 2015 Lecture 11 Classfcaton of Partal Dfferental Equatons PDEs) and eamples wth fnte dfference dscretzatons Parabolc PDEs Ellptc PDEs Hyperbolc PDEs Error Types and Dscretzaton
The Order Relation and Trace Inequalities for. Hermitian Operators
 Internatonal Mathematcal Forum, Vol 3, 08, no, 507-57 HIKARI Ltd, wwwm-hkarcom https://doorg/0988/mf088055 The Order Relaton and Trace Inequaltes for Hermtan Operators Y Huang School of Informaton Scence
Internatonal Mathematcal Forum, Vol 3, 08, no, 507-57 HIKARI Ltd, wwwm-hkarcom https://doorg/0988/mf088055 The Order Relaton and Trace Inequaltes for Hermtan Operators Y Huang School of Informaton Scence
Canonical transformations
 Canoncal transformatons November 23, 2014 Recall that we have defned a symplectc transformaton to be any lnear transformaton M A B leavng the symplectc form nvarant, Ω AB M A CM B DΩ CD Coordnate transformatons,
Canoncal transformatons November 23, 2014 Recall that we have defned a symplectc transformaton to be any lnear transformaton M A B leavng the symplectc form nvarant, Ω AB M A CM B DΩ CD Coordnate transformatons,
Computational Astrophysics
 Computatonal Astrophyscs Solvng for Gravty Alexander Knebe, Unversdad Autonoma de Madrd Computatonal Astrophyscs Solvng for Gravty the equatons full set of equatons collsonless matter (e.g. dark matter
Computatonal Astrophyscs Solvng for Gravty Alexander Knebe, Unversdad Autonoma de Madrd Computatonal Astrophyscs Solvng for Gravty the equatons full set of equatons collsonless matter (e.g. dark matter