Mean field coupling of expanding circle maps
|
|
|
- Angelica Griffin
- 5 years ago
- Views:
Transcription
1 Department of Stochastics, TU Budapest October 2, 205.
2 Motivation José Koiller and Lai-Sang Young. Coupled map networks. Nonlinearity, 23(5):2, 200. Bastien Fernandez. Breaking of ergodicity in expanding systems of globally coupled piecewise affine circle maps. Journal of Statistical Physics, 54(4): , 204.
3 The coupled map system Phase space: T Dynamics: F µ = d Φ µ, where Φ µ (x) = x + ε 0 g(y x) dµ(y) mod (coupling) d(x) = 2x mod (site dynamics) 2 g(u) u
4 ( F µ (x) = 2 x + ε 0 ) g(y x) dµ(y) mod 0 ε Consider the system (F µ0, T). Let µ = (F µ0 ) µ 0. Then consider (F µ, T), and let µ 2 = (F µ ) µ... Question. lim t µ t =? Question 2. lim T T T t=0 µ t =? Question 3. "long-time behaviour of µ "?
5 Singular initial measure Initial measure: µ 0 = N δ xi. N i= Dynamics: ( ) F µ0 (x) = 2 x + ε N g(x i x) N i= mod. The pushforward of µ 0 : µ = (F µ0 ) µ 0 = N N δ Fµ0 (x i ). i=
6 A dynamical system on T N Consider the map ( (F ε,n (x)) s = 2 x s + ε N ) N g(x r x s ), s {,..., N}, r= x = (x s ) N s= T N. Piecewise affine map of T N. Expanding if ε < 2. finite number of ergodic acims (µ F ) with basin almost all of T N with densities in BV, see for example B. Saussol. Absolutely continuous invariant measures for multidimensional expanding maps. Israel Journal of Mathematics, 6(): , or D. Thomine. A spectral gap for transer operators of piecewise expanding maps, 200.
7 Each circle (x,..., x N ) + (t,..., t) mod is mapped onto another such circle (y,..., y N ) + (t,..., t) mod by stretching to twice its size then covering it twice. Ergodic components contain full such circles. The invariant density is actually constant on such circles. From this we can get, that the marginals of µ F have constant density, hence they are Lebesgue.
8 A(T ) = T (δ x,...,x N + + δ F T ε,n (x,...,x N ) ) µ F Because the marginals of µ F are Lebesgue (denoted by λ). A(T ) i = T (δ x i + + δ F T (x i )) λ. T µ t = T T t=0 T t=0 + N ( N N i= N δ xi + N δ N F (xi ) +... i= i= ) = N A(T ) i λ N δ F T (x i ) for Lebesgue a. e. x = (x i ) N i= TN. i=
9 Ergodic properties of (F ε,n, T N ) F 0,N is ergodic and mixing w. r. t. λ λ, F ε,n : a perturbation of F 0,N, F ε,n has a unique ergodic and mixing invariant measure if ε < ε 0 (N), for some small ε 0 (N), see G. Keller C. Liverani. Uniqueness of the SRB measure for piecewise expanding weakly coupled map lattices in any dimension. Communications in Mathemathical Physics, 262()33 50, Question: Is it true that there exists some ε (N), such that for ε > ε (N) the system fails to be ergodic (mixing)?
10 Breaking of ergodicity is only visible in the perpendicular direction to the main diagonal of the hypercube. New coordinates: u = N x s mod, s= u i+ = x i x i+ mod, i =,..., N We get a factor of the original system: G ε,n (u ) = 2 n (F ε,n (x)) s = 2u mod s= G ε,n (u i+ ) = (F ε,n (x)) i (F ε,n (x)) i+ mod, i =,..., N
11 { x, x + N,..., x + N } N share the same u-coordinates. G ε,n u : doubling map, invariant measure is Lebesgue G ε,n u2,...,u N : piecewise affine map of T N, expanding if ε < 2 : finite number of ergodic acims with basin almost all of T N with densities in BV, see again Saussol, Thomine. Acims of (G ε,n, T N ): µ G = λ ν
12 N=2, expanding case: 0 < ε < 2 F ε,2 (x, y) = (2x + εg(y x), 2y + εg(x y)) mod, x, y T. Notice: u = x + y 2(x + y) mod, u 2 = x y 2(x y) 2εg(x y) mod. Factor dynamical system: (x, y) ( x + 2, y + 2 G ε,2 (u, u 2 ) = (2u, 2u 2 2εg(u 2 )) mod, u, u 2 T. )
13 H(u 2 ) = 2u 2 2εg(u 2 ) mod The map H is conjugate with a linear Lorenz map of slope 2( ε). H(u 2 ) L(u 2 ) ε ε ε ε u 2 u 2
14 Theorem (Glendinning-Sparrow, 993) If a Lorenz map is not renormalizable, then it admits a unique mixing acim with support [0, ]. Theorem (W. Parry, 979) Let 2n+ 2 < 2( ε) < 2 n 2. A Lorenz map L with slope 2( ε) is n times renormalizable, R k L = L 2k Jk, 0 k < n, and the renormalizalion intervals form a nested sequence around 2 : 2 J k J k J J 0 = [0, ].
15 Corollary The Lorenz map L admits an ergodic acim and its attractor A = i=0 Li ([0, ]) is the union of 2 n mixing components if for the slope 2n+ 2 < 2( ε) < 2 n 2 holds. Ergodic invariant measure of H: µ H (mixing if ε < the attractor is the union of 2 n mixing components if 2 2 n < ε < 2 2 (n+) holds. Ergodic invariant measure of G ε,2 : µ G = λ µ H. Proposition F ε,2 admits an ergodic acim ( it is mixing if ε < attractor is the union of 2 n mixing components if 2 2 n < ε < 2 2 (n+) holds. ) 2 2, the ) 2 2,








16 Example: ε = 3 Figure : G /3,2 and tiling. Figure 2 : F /3,2.
17 N=3, expanding case: 0 < ε < 2 Factor map: F ε,3 (x, y, z) = (2x + 2ε (g(y x) + g(z x)), 3 2y + 2ε (g(x y) + g(z y)), 3 2z + 2ε (g(z x) + g(y z))), 3 mod, x, y, z T. u x + y + z; u 2, u 3 x y, y z (x, y, z) ( x + 3, y + 3, z + ( 3) x + 2 3, y + 2 3, z + 2 ) 3 G ε,3 (u, u 2, u 3 ) = (G ε,3(u ), G 2 ε,3(u 2, u 3 )).
18 G ε,3 (u ) = 2u mod, u T, G 2 ε,3(u 2, u 3 ) = (2u + 2ε 3 (g(u 2) g(u + u 2 ) 2g(u ), 2u 2 + 2ε 3 (g(u ) g(u + u 2 ) 2g(u 2 ))) mod, u, u 2 T v u Figure 3 : Phase space of G 2 ε,3.
19 u=ε /3 v=δ u+v=σ v= ε /3 u= δ u+v=+ε /3 u+v= ε /3 u=δ v=ε /3 u+v=2 σ v= δ u= ε /3 u=v (VIb) (Vb2) (VIb) v= u/2+ (Ib2) (Ib) (Vb) (IIb2) (IIb) (IVb) (IIIb) v= 2u+ (IVb2) (IIIb2) v= 2u+2 (VIa2) (Ia2) (VIa) (Ia) (Va) (Va2) v= u/2+/2 (IIa) (IVa) (IVa2) (IIIa) (IIa2) (IIIa2) Figure 4 : The attractor and the invariant sets.
20 I = x=a,b k=,2 (Ixk),..., VI = x=a,b k=,2 (VIxk) Proposition If ε , then the sets I, II,..., VI are invariant with respect to the map G 2 ε,3. Corollary If ε 4 0 2, the dynamical system governed by the map F ε,3 does not have a unique ergodic acim, it has at least six ergodic components.
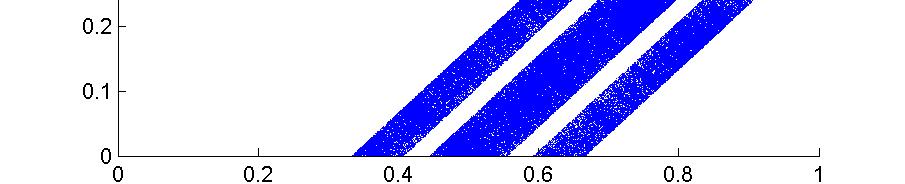
21 Figure 5 : ε = 0.2
22 Figure 6 : ε = 0.42
23 Let d be the quasimetric on T such that d(x, y) is the length of the counterclockwise arc from x to y. The invariant components correspond to the following type of states: I : II : III : IV : V : VI : {x, y, z S : d(x, y) < d(z, x) < d(y, z)}, {x, y, z S : d(x, y) < d(y, z) < d(z, x)}, {x, y, z S : d(y, z) < d(x, y) < d(z, x)}, {x, y, z S : d(y, z) < d(z, x) < d(x, y)}, {x, y, z S : d(z, x) < d(y, z) < d(x, y)}, {x, y, z S : d(z, x) < d(x, y) < d(y, z)}. Switch to the other hexagon: reverse the order of x, y, z on T N d(x, y), d(y, z), d(z, x) > ε 3
24 Contracting case: 2 < ε < N = 2: Gε,2 2 : 0 attracts every trajectory, F ε,2 : the diagonal x = y attracts every trajectory, and the map acts as the doubling map on it: the two sites synchronize N = 3: G 2 ε,3 : (0, 0) fixed point, ( 3, 3) ( 2 3, 2 3) periodic cycle attracts every trajectory. F ε,3 : an invariant circle, and two other circles mapped to each other give the attractor: either every site synchronizes, or the sites will be evenly placed on T and change order in each step.
25 N > 3 A T (x) = T (N ) T t=0 N ((Gε,N 2 )t+t 0 (x)) s? s= N = 4 and N = 5: A T A T ε ε Conjecture. There exists a threshold value ε(n) < 2, such that the system (F ε,n, T N ), ε(n) < ε < 2 has multiple ergodic components. These are related to the order of the distances between the sites: there are N! of them.
26 Absolutely continuous initial measure Let dµ = f dλ. Then ( F f (x) = 2 x + ε 0 ) g(y x)f (y) dy mod Let L Ff = L f. Then L f f (x) = y F (x) f f (y) F f (y). Let dµ 0 = f 0 dλ. Consider the system (F f0, T). Let f = L f0 f 0. Then let dµ = f dλ. Consider (F f, T), and let f 2 (x) = L f f... Question. lim t f t =? Question 2. "long-time behaviour of f "?
27 Let f C(T), dµ = f dλ. Facts about F f : F f C (T), Monotone increasing, Degree 2 covering map of T it has two invertible branches (the inverses of the branches will be denoted by y ( ), y 2 ( ))
28 The case of small ε Let f. Then F (x) = 2x mod and L f f (x) = ( ( x ) ( )) x + f + f = ( + ) = for all x T Theorem Let f 0 C (T) be a density such that f 0 TV δ. Assume that ε > 0 is such that ε < + 2δ. Then the density f of the pushforward measure (F µ0 ) µ 0 is in C (T) and has total variation for some c <. f TV c f 0 TV
29 Sketch of the proof: d L f f TV = 0 dx f (y)f f (y (x))y (x) (F f (y (x))) 2 Use that y F (x) f f (y) F f (y) + f (y 2 (x))y 2 (x) F f (y 2(x)) dx = f (y (x))y (x) 0 F f (y (x)) f (y)f f (y 2(x))y 2 (x) (F f (y 2(x))) 2 dx ( F f (x) = 2εf x ± ) 2 L f f TV + ε 2( εδ) 2 0 f (t) dt = + ε 2( εδ) 2 f TV
30 Case of large ε: strong coupling First we want to understand the sole effect of the coupling better. The coupling dynamics: Φ f (x) = x + ε 0 g(y x)f (y) d(y) mod. Let L Φf = L f be the associated transfer operator. We now calculate f = L f0 f 0, f 2 = L f f... Facts about Φ f : If f C(T), then it is a diffeomorphism of T, Monotone increasing.
31 Some limit behaviours Suppose f is supported on an interval of length 2 of mass if suppf [b, b 2 ]: on T. Center M(f ) = if suppf [0, b 2 ] [b, ]: M(f ) = b2 0 b2 b yf 0 (y) dy. (y + )f 0 (y) dy + yf 0 (y) dy b mod,
32 b M b 2 M b 2 b M + b 2 +
33 Let d be the quasimetric such that d(x, y) is the length of the clockwise arc from b to b 2. Proposition Let f 0 C(T) such that suppf 0 [b, b 2 ] or suppf 0 [0, b 2 ] [b, ], such that d(b, b 2 ) 2. The density f = L f f 0 is in C(T) and has support contained suppf [b, b 2 ], or suppf [0, b 2 ] [b, ], such that d(b, b 2 ) = ( ε)d(b, b 2 ), sup f = sup f 0 ε, M(f ) = M(f 0 )
34 sup f 0 ε sup f 0 f f 0 b b b 2 b 2
35 Proposition Let f 0 C(T) be 2 -periodic such that 0 xf 0(x) dx = 2. Then f C(T) is also 2 -periodic such that 0 xf (x) dx = 2, and f = ( ε) f 0, where denotes the constant function on T. 2
36 Back to F f and strong coupling Proposition Let f 0 C(T) such that suppf 0 [b, b 2 ] or suppf 0 [0, b 2 ] [b, ], such that d(b, b 2 ) 2. The density f = L f0 f 0 is in C(T) and has support contained suppf [b, b 2 ], or suppf [0, b 2 ] [b, ], such that d(b, b 2 ) = 2( ε)d(b, b 2 ), sup f = sup f 0 2( ε), M(f ) = 2M(f 0 ) mod
37 Note: 2( ε) if ε 2. sup f 0 2( ε) f sup f 0 f 0 b If ε = 2, then f is a translation of f 0 (on T). 2 b 2
38 Proposition Let 0 b < b 2 such that 2 < b 2 b < and let f 0 C(T) suppf 0 [b, b 2 ]. Let us assume that Let C = b2 2 0 f 0 (y) dy + f 0 (y) dy <. (T ) b (b 2 b ) 4 (b 2 b ) C ε <. The density f = L f0 f 0 C(T) has support contained in some interval [0, b 2 ] [b, 0] such that d(b, b 2 ) 2.
39 b b 2 b 2 2 b + 2
40 Summary of the absolutely continuous case Coupling dynamics (Φ f ): A well-concentrated initial distribution converges to a point measure supported on the center of mass. Certain symmetries in the initial distribution cause fast convergence to uniform distribution. Coupled dynamics (F f ): The density f is always invariant, other invariant densities exist when ε = 2. If ε is sufficiently small, the distribution converges the uniform. If ε is sufficiently large and the initial- distribution is well concentrated, the support of the distribution shrinks to a single point, while the center of mass shifts as the doubling map.
41 Thank you for your attention!
42 Coupling map: convergence to point mass when support is large Proposition Let f 0 C(T). Assume that f 0 (x) dx = xf 0 (x) dx = 2, 2 f 0 (x) dx = 2 The properties (S) and (S2) also hold for f = L f0 f 0. (S) (S2)
43 Proposition Let f 0 C(T) be such that f 0 (x) = f 0 ( x) for all x T. (S3) Then f = L f0 f 0 C(T) and also has property (S3).
44 Unimodal maps (P) f C (T), satisfies (S3) or (S) & (S2). (P2) f (0) = 0, f ( 2) = c(f ) > 0. (P3) f (0, 2) > 0, f (,) < 0. 2 If f 0 satisfies (P) (P3), then f = L f0 f 0 also satisfies (P) (P3). c(f ) = c(f 0) ε > c(f 0). 2 +δ f 0 (x) dx < 2 δ 2 +δ f (x) dx for all δ 2 δ ( 0, 2).
A FAMILY OF PIECEWISE EXPANDING MAPS HAVING SINGULAR MEASURE AS A LIMIT OF ACIM S
 A FAMILY OF PIECEWISE EXPANDING MAPS HAVING SINGULAR MEASURE AS A LIMIT OF ACIM S ZHENYANG LI, PAWE L GÓ, ABRAHAM BOYARSKY, HARALD PROPPE, AND PEYMAN ESLAMI Abstract Keller [9] introduced families of W
A FAMILY OF PIECEWISE EXPANDING MAPS HAVING SINGULAR MEASURE AS A LIMIT OF ACIM S ZHENYANG LI, PAWE L GÓ, ABRAHAM BOYARSKY, HARALD PROPPE, AND PEYMAN ESLAMI Abstract Keller [9] introduced families of W
Rigorous approximation of invariant measures for IFS Joint work April 8, with 2016 S. 1 Galat / 21
 Rigorous approximation of invariant measures for IFS Joint work with S. Galatolo e I. Nisoli Maurizio Monge maurizio.monge@im.ufrj.br Universidade Federal do Rio de Janeiro April 8, 2016 Rigorous approximation
Rigorous approximation of invariant measures for IFS Joint work with S. Galatolo e I. Nisoli Maurizio Monge maurizio.monge@im.ufrj.br Universidade Federal do Rio de Janeiro April 8, 2016 Rigorous approximation
Lorenz like flows. Maria José Pacifico. IM-UFRJ Rio de Janeiro - Brasil. Lorenz like flows p. 1
 Lorenz like flows Maria José Pacifico pacifico@im.ufrj.br IM-UFRJ Rio de Janeiro - Brasil Lorenz like flows p. 1 Main goals The main goal is to explain the results (Galatolo-P) Theorem A. (decay of correlation
Lorenz like flows Maria José Pacifico pacifico@im.ufrj.br IM-UFRJ Rio de Janeiro - Brasil Lorenz like flows p. 1 Main goals The main goal is to explain the results (Galatolo-P) Theorem A. (decay of correlation
Properties for systems with weak invariant manifolds
 Statistical properties for systems with weak invariant manifolds Faculdade de Ciências da Universidade do Porto Joint work with José F. Alves Workshop rare & extreme Gibbs-Markov-Young structure Let M
Statistical properties for systems with weak invariant manifolds Faculdade de Ciências da Universidade do Porto Joint work with José F. Alves Workshop rare & extreme Gibbs-Markov-Young structure Let M
STRONGER LASOTA-YORKE INEQUALITY FOR ONE-DIMENSIONAL PIECEWISE EXPANDING TRANSFORMATIONS
 PROCEEDNGS OF THE AMERCAN MATHEMATCAL SOCETY Volume 00, Number 0, Pages 000 000 S 0002-9939(XX)0000-0 STRONGER LASOTA-YORKE NEQUALTY FOR ONE-DMENSONAL PECEWSE EXPANDNG TRANSFORMATONS PEYMAN ESLAM AND PAWEL
PROCEEDNGS OF THE AMERCAN MATHEMATCAL SOCETY Volume 00, Number 0, Pages 000 000 S 0002-9939(XX)0000-0 STRONGER LASOTA-YORKE NEQUALTY FOR ONE-DMENSONAL PECEWSE EXPANDNG TRANSFORMATONS PEYMAN ESLAM AND PAWEL
A Family of Piecewise Expanding Maps having Singular Measure as a limit of ACIM s
 Ergod. Th. & Dynam. Sys. (,, Printed in the United Kingdom c Cambridge University Press A Family of Piecewise Expanding Maps having Singular Measure as a it of ACIM s Zhenyang Li,Pawe l Góra, Abraham Boyarsky,
Ergod. Th. & Dynam. Sys. (,, Printed in the United Kingdom c Cambridge University Press A Family of Piecewise Expanding Maps having Singular Measure as a it of ACIM s Zhenyang Li,Pawe l Góra, Abraham Boyarsky,
Renormalization for Lorenz maps
 Renormalization for Lorenz maps Denis Gaidashev, Matematiska Institutionen, Uppsala Universitet Tieste, June 5, 2012 D. Gaidashev, Uppsala Universitet () Renormalization for Lorenz maps Tieste, June 5,
Renormalization for Lorenz maps Denis Gaidashev, Matematiska Institutionen, Uppsala Universitet Tieste, June 5, 2012 D. Gaidashev, Uppsala Universitet () Renormalization for Lorenz maps Tieste, June 5,
Periodic Sinks and Observable Chaos
 Periodic Sinks and Observable Chaos Systems of Study: Let M = S 1 R. T a,b,l : M M is a three-parameter family of maps defined by where θ S 1, r R. θ 1 = a+θ +Lsin2πθ +r r 1 = br +blsin2πθ Outline of Contents:
Periodic Sinks and Observable Chaos Systems of Study: Let M = S 1 R. T a,b,l : M M is a three-parameter family of maps defined by where θ S 1, r R. θ 1 = a+θ +Lsin2πθ +r r 1 = br +blsin2πθ Outline of Contents:
The Banach Tarski Paradox and Amenability Lecture 23: Unitary Representations and Amenability. 23 October 2012
 The Banach Tarski Paradox and Amenability Lecture 23: Unitary Representations and Amenability 23 October 2012 Subgroups of amenable groups are amenable One of today s aims is to prove: Theorem Let G be
The Banach Tarski Paradox and Amenability Lecture 23: Unitary Representations and Amenability 23 October 2012 Subgroups of amenable groups are amenable One of today s aims is to prove: Theorem Let G be
2. Isometries and Rigid Motions of the Real Line
 21 2. Isometries and Rigid Motions of the Real Line Suppose two metric spaces have different names but are essentially the same geometrically. Then we need a way of relating the two spaces. Similarly,
21 2. Isometries and Rigid Motions of the Real Line Suppose two metric spaces have different names but are essentially the same geometrically. Then we need a way of relating the two spaces. Similarly,
MATH MEASURE THEORY AND FOURIER ANALYSIS. Contents
 MATH 3969 - MEASURE THEORY AND FOURIER ANALYSIS ANDREW TULLOCH Contents 1. Measure Theory 2 1.1. Properties of Measures 3 1.2. Constructing σ-algebras and measures 3 1.3. Properties of the Lebesgue measure
MATH 3969 - MEASURE THEORY AND FOURIER ANALYSIS ANDREW TULLOCH Contents 1. Measure Theory 2 1.1. Properties of Measures 3 1.2. Constructing σ-algebras and measures 3 1.3. Properties of the Lebesgue measure
Breaking of Ergodicity in Expanding Systems of Globally Coupled Piecewise Affine Circle Maps
 Breaking of Ergodicity in Expanding Systems of Globally Coupled Piecewise Affine Circle Maps Bastien Fernandez To cite this version: Bastien Fernandez. Breaking of Ergodicity in Expanding Systems of Globally
Breaking of Ergodicity in Expanding Systems of Globally Coupled Piecewise Affine Circle Maps Bastien Fernandez To cite this version: Bastien Fernandez. Breaking of Ergodicity in Expanding Systems of Globally
SRB measures for non-uniformly hyperbolic systems
 SRB measures for non-uniformly hyperbolic systems Vaughn Climenhaga University of Maryland October 21, 2010 Joint work with Dmitry Dolgopyat and Yakov Pesin 1 and classical results Definition of SRB measure
SRB measures for non-uniformly hyperbolic systems Vaughn Climenhaga University of Maryland October 21, 2010 Joint work with Dmitry Dolgopyat and Yakov Pesin 1 and classical results Definition of SRB measure
Module 2: Reflecting on One s Problems
 MATH55 Module : Reflecting on One s Problems Main Math concepts: Translations, Reflections, Graphs of Equations, Symmetry Auxiliary ideas: Working with quadratics, Mobius maps, Calculus, Inverses I. Transformations
MATH55 Module : Reflecting on One s Problems Main Math concepts: Translations, Reflections, Graphs of Equations, Symmetry Auxiliary ideas: Working with quadratics, Mobius maps, Calculus, Inverses I. Transformations
Smooth Livšic regularity for piecewise expanding maps
 Smooth Livšic regularity for piecewise expanding maps Matthew Nicol Tomas Persson July 22 2010 Abstract We consider the regularity of measurable solutions χ to the cohomological equation φ = χ T χ where
Smooth Livšic regularity for piecewise expanding maps Matthew Nicol Tomas Persson July 22 2010 Abstract We consider the regularity of measurable solutions χ to the cohomological equation φ = χ T χ where
TYPICAL POINTS FOR ONE-PARAMETER FAMILIES OF PIECEWISE EXPANDING MAPS OF THE INTERVAL
 TYPICAL POINTS FOR ONE-PARAMETER FAMILIES OF PIECEWISE EXPANDING MAPS OF THE INTERVAL DANIEL SCHNELLMANN Abstract. Let I R be an interval and T a : [0, ] [0, ], a I, a oneparameter family of piecewise
TYPICAL POINTS FOR ONE-PARAMETER FAMILIES OF PIECEWISE EXPANDING MAPS OF THE INTERVAL DANIEL SCHNELLMANN Abstract. Let I R be an interval and T a : [0, ] [0, ], a I, a oneparameter family of piecewise
Introduction Hyperbolic systems Beyond hyperbolicity Counter-examples. Physical measures. Marcelo Viana. IMPA - Rio de Janeiro
 IMPA - Rio de Janeiro Asymptotic behavior General observations A special case General problem Let us consider smooth transformations f : M M on some (compact) manifold M. Analogous considerations apply
IMPA - Rio de Janeiro Asymptotic behavior General observations A special case General problem Let us consider smooth transformations f : M M on some (compact) manifold M. Analogous considerations apply
Forchheimer Equations in Porous Media - Part III
 Forchheimer Equations in Porous Media - Part III Luan Hoang, Akif Ibragimov Department of Mathematics and Statistics, Texas Tech niversity http://www.math.umn.edu/ lhoang/ luan.hoang@ttu.edu Applied Mathematics
Forchheimer Equations in Porous Media - Part III Luan Hoang, Akif Ibragimov Department of Mathematics and Statistics, Texas Tech niversity http://www.math.umn.edu/ lhoang/ luan.hoang@ttu.edu Applied Mathematics
Proof: The coding of T (x) is the left shift of the coding of x. φ(t x) n = L if T n+1 (x) L
 is the left shift of the coding of x. φ(t x) n = L if T n+1 (x) L") Lecture 24: Defn: Topological conjugacy: Given Z + d (resp, Zd ), actions T, S a topological conjugacy from T to S is a homeomorphism φ : M N s.t. φ T = S φ i.e., φ T n = S n φ for all n Z + d (resp, Zd
Lecture 24: Defn: Topological conjugacy: Given Z + d (resp, Zd ), actions T, S a topological conjugacy from T to S is a homeomorphism φ : M N s.t. φ T = S φ i.e., φ T n = S n φ for all n Z + d (resp, Zd
3 (Due ). Let A X consist of points (x, y) such that either x or y is a rational number. Is A measurable? What is its Lebesgue measure?
. Let A X consist of points (x, y) such that either x or y is a rational number. Is A measurable? What is its Lebesgue measure?") MA 645-4A (Real Analysis), Dr. Chernov Homework assignment 1 (Due ). Show that the open disk x 2 + y 2 < 1 is a countable union of planar elementary sets. Show that the closed disk x 2 + y 2 1 is a countable
MA 645-4A (Real Analysis), Dr. Chernov Homework assignment 1 (Due ). Show that the open disk x 2 + y 2 < 1 is a countable union of planar elementary sets. Show that the closed disk x 2 + y 2 1 is a countable
Kevin James. MTHSC 206 Section 16.4 Green s Theorem
 MTHSC 206 Section 16.4 Green s Theorem Theorem Let C be a positively oriented, piecewise smooth, simple closed curve in R 2. Let D be the region bounded by C. If P(x, y)( and Q(x, y) have continuous partial
MTHSC 206 Section 16.4 Green s Theorem Theorem Let C be a positively oriented, piecewise smooth, simple closed curve in R 2. Let D be the region bounded by C. If P(x, y)( and Q(x, y) have continuous partial
Homogenization for chaotic dynamical systems
 Homogenization for chaotic dynamical systems David Kelly Ian Melbourne Department of Mathematics / Renci UNC Chapel Hill Mathematics Institute University of Warwick November 3, 2013 Duke/UNC Probability
Homogenization for chaotic dynamical systems David Kelly Ian Melbourne Department of Mathematics / Renci UNC Chapel Hill Mathematics Institute University of Warwick November 3, 2013 Duke/UNC Probability
One dimensional Maps
 Chapter 4 One dimensional Maps The ordinary differential equation studied in chapters 1-3 provide a close link to actual physical systems it is easy to believe these equations provide at least an approximate
Chapter 4 One dimensional Maps The ordinary differential equation studied in chapters 1-3 provide a close link to actual physical systems it is easy to believe these equations provide at least an approximate
If Λ = M, then we call the system an almost Anosov diffeomorphism.
 Ergodic Theory of Almost Hyperbolic Systems Huyi Hu Department of Mathematics, Pennsylvania State University, University Park, PA 16802, USA, E-mail:hu@math.psu.edu (In memory of Professor Liao Shantao)
Ergodic Theory of Almost Hyperbolic Systems Huyi Hu Department of Mathematics, Pennsylvania State University, University Park, PA 16802, USA, E-mail:hu@math.psu.edu (In memory of Professor Liao Shantao)
ANALYSIS QUALIFYING EXAM FALL 2017: SOLUTIONS. 1 cos(nx) lim. n 2 x 2. g n (x) = 1 cos(nx) n 2 x 2. x 2.
 lim. n 2 x 2. g n (x) = 1 cos(nx) n 2 x 2. x 2.") ANALYSIS QUALIFYING EXAM FALL 27: SOLUTIONS Problem. Determine, with justification, the it cos(nx) n 2 x 2 dx. Solution. For an integer n >, define g n : (, ) R by Also define g : (, ) R by g(x) = g n
ANALYSIS QUALIFYING EXAM FALL 27: SOLUTIONS Problem. Determine, with justification, the it cos(nx) n 2 x 2 dx. Solution. For an integer n >, define g n : (, ) R by Also define g : (, ) R by g(x) = g n
Hamiltonian partial differential equations and Painlevé transcendents
 The 6th TIMS-OCAMI-WASEDA Joint International Workshop on Integrable Systems and Mathematical Physics March 22-26, 2014 Hamiltonian partial differential equations and Painlevé transcendents Boris DUBROVIN
The 6th TIMS-OCAMI-WASEDA Joint International Workshop on Integrable Systems and Mathematical Physics March 22-26, 2014 Hamiltonian partial differential equations and Painlevé transcendents Boris DUBROVIN
2 Two-Point Boundary Value Problems
 2 Two-Point Boundary Value Problems Another fundamental equation, in addition to the heat eq. and the wave eq., is Poisson s equation: n j=1 2 u x 2 j The unknown is the function u = u(x 1, x 2,..., x
2 Two-Point Boundary Value Problems Another fundamental equation, in addition to the heat eq. and the wave eq., is Poisson s equation: n j=1 2 u x 2 j The unknown is the function u = u(x 1, x 2,..., x
On a Homoclinic Group that is not Isomorphic to the Character Group *
 QUALITATIVE THEORY OF DYNAMICAL SYSTEMS, 1 6 () ARTICLE NO. HA-00000 On a Homoclinic Group that is not Isomorphic to the Character Group * Alex Clark University of North Texas Department of Mathematics
QUALITATIVE THEORY OF DYNAMICAL SYSTEMS, 1 6 () ARTICLE NO. HA-00000 On a Homoclinic Group that is not Isomorphic to the Character Group * Alex Clark University of North Texas Department of Mathematics
Set oriented numerics
 Set oriented numerics Oliver Junge Center for Mathematics Technische Universität München Applied Koopmanism, MFO, February 2016 Motivation Complicated dynamics ( chaos ) Edward N. Lorenz, 1917-2008 Sensitive
Set oriented numerics Oliver Junge Center for Mathematics Technische Universität München Applied Koopmanism, MFO, February 2016 Motivation Complicated dynamics ( chaos ) Edward N. Lorenz, 1917-2008 Sensitive
CHEM 10113, Quiz 5 October 26, 2011
 CHEM 10113, Quiz 5 October 26, 2011 Name (please print) All equations must be balanced and show phases for full credit. Significant figures count, show charges as appropriate, and please box your answers!
CHEM 10113, Quiz 5 October 26, 2011 Name (please print) All equations must be balanced and show phases for full credit. Significant figures count, show charges as appropriate, and please box your answers!
Math 127C, Spring 2006 Final Exam Solutions. x 2 ), g(y 1, y 2 ) = ( y 1 y 2, y1 2 + y2) 2. (g f) (0) = g (f(0))f (0).
, g(y 1, y 2 ) = ( y 1 y 2, y1 2 + y2) 2. (g f) (0) = g (f(0))f (0).") Math 27C, Spring 26 Final Exam Solutions. Define f : R 2 R 2 and g : R 2 R 2 by f(x, x 2 (sin x 2 x, e x x 2, g(y, y 2 ( y y 2, y 2 + y2 2. Use the chain rule to compute the matrix of (g f (,. By the chain
Math 27C, Spring 26 Final Exam Solutions. Define f : R 2 R 2 and g : R 2 R 2 by f(x, x 2 (sin x 2 x, e x x 2, g(y, y 2 ( y y 2, y 2 + y2 2. Use the chain rule to compute the matrix of (g f (,. By the chain
2 Functions of random variables
 2 Functions of random variables A basic statistical model for sample data is a collection of random variables X 1,..., X n. The data are summarised in terms of certain sample statistics, calculated as
2 Functions of random variables A basic statistical model for sample data is a collection of random variables X 1,..., X n. The data are summarised in terms of certain sample statistics, calculated as
MATH 614 Dynamical Systems and Chaos Lecture 38: Ergodicity (continued). Mixing.
. Mixing.") MATH 614 Dynamical Systems and Chaos Lecture 38: Ergodicity (continued). Mixing. Ergodic theorems Let (X,B,µ) be a measured space and T : X X be a measure-preserving transformation. Birkhoff s Ergodic
MATH 614 Dynamical Systems and Chaos Lecture 38: Ergodicity (continued). Mixing. Ergodic theorems Let (X,B,µ) be a measured space and T : X X be a measure-preserving transformation. Birkhoff s Ergodic
S chauder Theory. x 2. = log( x 1 + x 2 ) + 1 ( x 1 + x 2 ) 2. ( 5) x 1 + x 2 x 1 + x 2. 2 = 2 x 1. x 1 x 2. 1 x 1.
 + 1 ( x 1 + x 2 ) 2. ( 5) x 1 + x 2 x 1 + x 2. 2 = 2 x 1. x 1 x 2. 1 x 1.") Sep. 1 9 Intuitively, the solution u to the Poisson equation S chauder Theory u = f 1 should have better regularity than the right hand side f. In particular one expects u to be twice more differentiable
Sep. 1 9 Intuitively, the solution u to the Poisson equation S chauder Theory u = f 1 should have better regularity than the right hand side f. In particular one expects u to be twice more differentiable
Sec. 14.3: Partial Derivatives. All of the following are ways of representing the derivative. y dx
 Math 2204 Multivariable Calc Chapter 14: Partial Derivatives I. Review from math 1225 A. First Derivative Sec. 14.3: Partial Derivatives 1. Def n : The derivative of the function f with respect to the
Math 2204 Multivariable Calc Chapter 14: Partial Derivatives I. Review from math 1225 A. First Derivative Sec. 14.3: Partial Derivatives 1. Def n : The derivative of the function f with respect to the
SEMICONJUGACY TO A MAP OF A CONSTANT SLOPE
 SEMICONJUGACY TO A MAP OF A CONSTANT SLOPE Abstract. It is well known that a continuous piecewise monotone interval map with positive topological entropy is semiconjugate to a map of a constant slope and
SEMICONJUGACY TO A MAP OF A CONSTANT SLOPE Abstract. It is well known that a continuous piecewise monotone interval map with positive topological entropy is semiconjugate to a map of a constant slope and
On the smoothness of the conjugacy between circle maps with a break
 On the smoothness of the conjugacy between circle maps with a break Konstantin Khanin and Saša Kocić 2 Department of Mathematics, University of Toronto, Toronto, ON, Canada M5S 2E4 2 Department of Mathematics,
On the smoothness of the conjugacy between circle maps with a break Konstantin Khanin and Saša Kocić 2 Department of Mathematics, University of Toronto, Toronto, ON, Canada M5S 2E4 2 Department of Mathematics,
Math 23b Practice Final Summer 2011
 Math 2b Practice Final Summer 211 1. (1 points) Sketch or describe the region of integration for 1 x y and interchange the order to dy dx dz. f(x, y, z) dz dy dx Solution. 1 1 x z z f(x, y, z) dy dx dz
Math 2b Practice Final Summer 211 1. (1 points) Sketch or describe the region of integration for 1 x y and interchange the order to dy dx dz. f(x, y, z) dz dy dx Solution. 1 1 x z z f(x, y, z) dy dx dz
SHOCK WAVES FOR RADIATIVE HYPERBOLIC ELLIPTIC SYSTEMS
 SHOCK WAVES FOR RADIATIVE HYPERBOLIC ELLIPTIC SYSTEMS CORRADO LATTANZIO, CORRADO MASCIA, AND DENIS SERRE Abstract. The present paper deals with the following hyperbolic elliptic coupled system, modelling
SHOCK WAVES FOR RADIATIVE HYPERBOLIC ELLIPTIC SYSTEMS CORRADO LATTANZIO, CORRADO MASCIA, AND DENIS SERRE Abstract. The present paper deals with the following hyperbolic elliptic coupled system, modelling
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II.
 Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
lim n C1/n n := ρ. [f(y) f(x)], y x =1 [f(x) f(y)] [g(x) g(y)]. (x,y) E A E(f, f),
![lim n C1/n n := ρ. [f(y) f(x)], y x =1 [f(x) f(y)] [g(x) g(y)]. (x,y) E A E(f, f),](/thumbs/76/73980372.jpg "lim n C1/n n := ρ. [f(y) f(x)], y x =1 [f(x) f(y)] [g(x) g(y)]. (x,y) E A E(f, f),") 1 Part I Exercise 1.1. Let C n denote the number of self-avoiding random walks starting at the origin in Z of length n. 1. Show that (Hint: Use C n+m C n C m.) lim n C1/n n = inf n C1/n n := ρ.. Show that
1 Part I Exercise 1.1. Let C n denote the number of self-avoiding random walks starting at the origin in Z of length n. 1. Show that (Hint: Use C n+m C n C m.) lim n C1/n n = inf n C1/n n := ρ.. Show that
6.2 Fubini s Theorem. (µ ν)(c) = f C (x) dµ(x). (6.2) Proof. Note that (X Y, A B, µ ν) must be σ-finite as well, so that.
(c) = f C (x) dµ(x). (6.2) Proof. Note that (X Y, A B, µ ν) must be σ-finite as well, so that.") 6.2 Fubini s Theorem Theorem 6.2.1. (Fubini s theorem - first form) Let (, A, µ) and (, B, ν) be complete σ-finite measure spaces. Let C = A B. Then for each µ ν- measurable set C C the section x C is
6.2 Fubini s Theorem Theorem 6.2.1. (Fubini s theorem - first form) Let (, A, µ) and (, B, ν) be complete σ-finite measure spaces. Let C = A B. Then for each µ ν- measurable set C C the section x C is
PHY411 Lecture notes Part 5
 PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
Invariances in spectral estimates. Paris-Est Marne-la-Vallée, January 2011
 Invariances in spectral estimates Franck Barthe Dario Cordero-Erausquin Paris-Est Marne-la-Vallée, January 2011 Notation Notation Given a probability measure ν on some Euclidean space, the Poincaré constant
Invariances in spectral estimates Franck Barthe Dario Cordero-Erausquin Paris-Est Marne-la-Vallée, January 2011 Notation Notation Given a probability measure ν on some Euclidean space, the Poincaré constant
Math 172 Problem Set 5 Solutions
 Math 172 Problem Set 5 Solutions 2.4 Let E = {(t, x : < x b, x t b}. To prove integrability of g, first observe that b b b f(t b b g(x dx = dt t dx f(t t dtdx. x Next note that f(t/t χ E is a measurable
Math 172 Problem Set 5 Solutions 2.4 Let E = {(t, x : < x b, x t b}. To prove integrability of g, first observe that b b b f(t b b g(x dx = dt t dx f(t t dtdx. x Next note that f(t/t χ E is a measurable
Eigenfunctions for smooth expanding circle maps
 December 3, 25 1 Eigenfunctions for smooth expanding circle maps Gerhard Keller and Hans-Henrik Rugh December 3, 25 Abstract We construct a real-analytic circle map for which the corresponding Perron-
December 3, 25 1 Eigenfunctions for smooth expanding circle maps Gerhard Keller and Hans-Henrik Rugh December 3, 25 Abstract We construct a real-analytic circle map for which the corresponding Perron-
CHAPTER 1. Metric Spaces. 1. Definition and examples
 CHAPTER Metric Spaces. Definition and examples Metric spaces generalize and clarify the notion of distance in the real line. The definitions will provide us with a useful tool for more general applications
CHAPTER Metric Spaces. Definition and examples Metric spaces generalize and clarify the notion of distance in the real line. The definitions will provide us with a useful tool for more general applications
6.2 Brief review of fundamental concepts about chaotic systems
 6.2 Brief review of fundamental concepts about chaotic systems Lorenz (1963) introduced a 3-variable model that is a prototypical example of chaos theory. These equations were derived as a simplification
6.2 Brief review of fundamental concepts about chaotic systems Lorenz (1963) introduced a 3-variable model that is a prototypical example of chaos theory. These equations were derived as a simplification
Problem set 7 Math 207A, Fall 2011 Solutions
 Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Discrete Geometry. Problem 1. Austin Mohr. April 26, 2012
 Discrete Geometry Austin Mohr April 26, 2012 Problem 1 Theorem 1 (Linear Programming Duality). Suppose x, y, b, c R n and A R n n, Ax b, x 0, A T y c, and y 0. If x maximizes c T x and y minimizes b T
Discrete Geometry Austin Mohr April 26, 2012 Problem 1 Theorem 1 (Linear Programming Duality). Suppose x, y, b, c R n and A R n n, Ax b, x 0, A T y c, and y 0. If x maximizes c T x and y minimizes b T
Mathematical modelling of collective behavior
 Mathematical modelling of collective behavior Young-Pil Choi Fakultät für Mathematik Technische Universität München This talk is based on joint works with José A. Carrillo, Maxime Hauray, and Samir Salem
Mathematical modelling of collective behavior Young-Pil Choi Fakultät für Mathematik Technische Universität München This talk is based on joint works with José A. Carrillo, Maxime Hauray, and Samir Salem
HARMONIC ANALYSIS. Date:
 HARMONIC ANALYSIS Contents. Introduction 2. Hardy-Littlewood maximal function 3. Approximation by convolution 4. Muckenhaupt weights 4.. Calderón-Zygmund decomposition 5. Fourier transform 6. BMO (bounded
HARMONIC ANALYSIS Contents. Introduction 2. Hardy-Littlewood maximal function 3. Approximation by convolution 4. Muckenhaupt weights 4.. Calderón-Zygmund decomposition 5. Fourier transform 6. BMO (bounded
LESSON 23: EXTREMA OF FUNCTIONS OF 2 VARIABLES OCTOBER 25, 2017
 LESSON : EXTREMA OF FUNCTIONS OF VARIABLES OCTOBER 5, 017 Just like with functions of a single variable, we want to find the minima (plural of minimum) and maxima (plural of maximum) of functions of several
LESSON : EXTREMA OF FUNCTIONS OF VARIABLES OCTOBER 5, 017 Just like with functions of a single variable, we want to find the minima (plural of minimum) and maxima (plural of maximum) of functions of several
Green s Functions and Distributions
 CHAPTER 9 Green s Functions and Distributions 9.1. Boundary Value Problems We would like to study, and solve if possible, boundary value problems such as the following: (1.1) u = f in U u = g on U, where
CHAPTER 9 Green s Functions and Distributions 9.1. Boundary Value Problems We would like to study, and solve if possible, boundary value problems such as the following: (1.1) u = f in U u = g on U, where
THE STRUCTURE OF THE SPACE OF INVARIANT MEASURES
 THE STRUCTURE OF THE SPACE OF INVARIANT MEASURES VAUGHN CLIMENHAGA Broadly, a dynamical system is a set X with a map f : X is discrete time. Continuous time considers a flow ϕ t : Xö. mostly consider discrete
THE STRUCTURE OF THE SPACE OF INVARIANT MEASURES VAUGHN CLIMENHAGA Broadly, a dynamical system is a set X with a map f : X is discrete time. Continuous time considers a flow ϕ t : Xö. mostly consider discrete
Part II Probability and Measure
 Part II Probability and Measure Theorems Based on lectures by J. Miller Notes taken by Dexter Chua Michaelmas 2016 These notes are not endorsed by the lecturers, and I have modified them (often significantly)
Part II Probability and Measure Theorems Based on lectures by J. Miller Notes taken by Dexter Chua Michaelmas 2016 These notes are not endorsed by the lecturers, and I have modified them (often significantly)
1.3 Group Actions. Exercise Prove that a CAT(1) piecewise spherical simplicial complex is metrically flag.
 piecewise spherical simplicial complex is metrically flag.") Exercise 1.2.6. Prove that a CAT(1) piecewise spherical simplicial complex is metrically flag. 1.3 Group Actions Definition 1.3.1. Let X be a metric space, and let λ : X X be an isometry. The displacement
Exercise 1.2.6. Prove that a CAT(1) piecewise spherical simplicial complex is metrically flag. 1.3 Group Actions Definition 1.3.1. Let X be a metric space, and let λ : X X be an isometry. The displacement
A Short Introduction to Ergodic Theory of Numbers. Karma Dajani
 A Short Introduction to Ergodic Theory of Numbers Karma Dajani June 3, 203 2 Contents Motivation and Examples 5 What is Ergodic Theory? 5 2 Number Theoretic Examples 6 2 Measure Preserving, Ergodicity
A Short Introduction to Ergodic Theory of Numbers Karma Dajani June 3, 203 2 Contents Motivation and Examples 5 What is Ergodic Theory? 5 2 Number Theoretic Examples 6 2 Measure Preserving, Ergodicity
For example, the real line is σ-finite with respect to Lebesgue measure, since
 More Measure Theory In this set of notes we sketch some results in measure theory that we don t have time to cover in full. Most of the results can be found in udin s eal & Complex Analysis. Some of the
More Measure Theory In this set of notes we sketch some results in measure theory that we don t have time to cover in full. Most of the results can be found in udin s eal & Complex Analysis. Some of the
DYNAMICAL CUBES AND A CRITERIA FOR SYSTEMS HAVING PRODUCT EXTENSIONS
 DYNAMICAL CUBES AND A CRITERIA FOR SYSTEMS HAVING PRODUCT EXTENSIONS SEBASTIÁN DONOSO AND WENBO SUN Abstract. For minimal Z 2 -topological dynamical systems, we introduce a cube structure and a variation
DYNAMICAL CUBES AND A CRITERIA FOR SYSTEMS HAVING PRODUCT EXTENSIONS SEBASTIÁN DONOSO AND WENBO SUN Abstract. For minimal Z 2 -topological dynamical systems, we introduce a cube structure and a variation
Math 265H: Calculus III Practice Midterm II: Fall 2014
 Name: Section #: Math 65H: alculus III Practice Midterm II: Fall 14 Instructions: This exam has 7 problems. The number of points awarded for each question is indicated in the problem. Answer each question
Name: Section #: Math 65H: alculus III Practice Midterm II: Fall 14 Instructions: This exam has 7 problems. The number of points awarded for each question is indicated in the problem. Answer each question
MATH 614 Dynamical Systems and Chaos Lecture 15: Maps of the circle.
 MATH 614 Dynamical Systems and Chaos Lecture 15: Maps of the circle. Circle S 1. S 1 = {(x,y) R 2 : x 2 + y 2 = 1} S 1 = {z C : z = 1} T 1 = R/Z T 1 = R/2πZ α : S 1 [0,2π), angular coordinate α : S 1 R/2πZ
MATH 614 Dynamical Systems and Chaos Lecture 15: Maps of the circle. Circle S 1. S 1 = {(x,y) R 2 : x 2 + y 2 = 1} S 1 = {z C : z = 1} T 1 = R/Z T 1 = R/2πZ α : S 1 [0,2π), angular coordinate α : S 1 R/2πZ
arxiv: v2 [math.nt] 25 Oct 2018
![arxiv: v2 [math.nt] 25 Oct 2018](/thumbs/89/99054909.jpg "arxiv: v2 [math.nt] 25 Oct 2018") arxiv:80.0248v2 [math.t] 25 Oct 208 Convergence rate for Rényi-type continued fraction expansions Gabriela Ileana Sebe Politehnica University of Bucharest, Faculty of Applied Sciences, Splaiul Independentei
arxiv:80.0248v2 [math.t] 25 Oct 208 Convergence rate for Rényi-type continued fraction expansions Gabriela Ileana Sebe Politehnica University of Bucharest, Faculty of Applied Sciences, Splaiul Independentei
Lecture 13 - Wednesday April 29th
 Lecture 13 - Wednesday April 29th jacques@ucsdedu Key words: Systems of equations, Implicit differentiation Know how to do implicit differentiation, how to use implicit and inverse function theorems 131
Lecture 13 - Wednesday April 29th jacques@ucsdedu Key words: Systems of equations, Implicit differentiation Know how to do implicit differentiation, how to use implicit and inverse function theorems 131
Chapter 3. Riemannian Manifolds - I. The subject of this thesis is to extend the combinatorial curve reconstruction approach to curves
 Chapter 3 Riemannian Manifolds - I The subject of this thesis is to extend the combinatorial curve reconstruction approach to curves embedded in Riemannian manifolds. A Riemannian manifold is an abstraction
Chapter 3 Riemannian Manifolds - I The subject of this thesis is to extend the combinatorial curve reconstruction approach to curves embedded in Riemannian manifolds. A Riemannian manifold is an abstraction
Convergence of Multivariate Quantile Surfaces
 Convergence of Multivariate Quantile Surfaces Adil Ahidar Institut de Mathématiques de Toulouse - CERFACS August 30, 2013 Adil Ahidar (Institut de Mathématiques de Toulouse Convergence - CERFACS) of Multivariate
Convergence of Multivariate Quantile Surfaces Adil Ahidar Institut de Mathématiques de Toulouse - CERFACS August 30, 2013 Adil Ahidar (Institut de Mathématiques de Toulouse Convergence - CERFACS) of Multivariate
SOLUTIONS OF SELECTED PROBLEMS
 SOLUTIONS OF SELECTED PROBLEMS Problem 36, p. 63 If µ(e n < and χ En f in L, then f is a.e. equal to a characteristic function of a measurable set. Solution: By Corollary.3, there esists a subsequence
SOLUTIONS OF SELECTED PROBLEMS Problem 36, p. 63 If µ(e n < and χ En f in L, then f is a.e. equal to a characteristic function of a measurable set. Solution: By Corollary.3, there esists a subsequence
Hyperbolic Geometry on Geometric Surfaces
 Mathematics Seminar, 15 September 2010 Outline Introduction Hyperbolic geometry Abstract surfaces The hemisphere model as a geometric surface The Poincaré disk model as a geometric surface Conclusion Introduction
Mathematics Seminar, 15 September 2010 Outline Introduction Hyperbolic geometry Abstract surfaces The hemisphere model as a geometric surface The Poincaré disk model as a geometric surface Conclusion Introduction
3. (a) What is a simple function? What is an integrable function? How is f dµ defined? Define it first
 What is a simple function? What is an integrable function? How is f dµ defined? Define it first") Math 632/6321: Theory of Functions of a Real Variable Sample Preinary Exam Questions 1. Let (, M, µ) be a measure space. (a) Prove that if µ() < and if 1 p < q
Math 632/6321: Theory of Functions of a Real Variable Sample Preinary Exam Questions 1. Let (, M, µ) be a measure space. (a) Prove that if µ() < and if 1 p < q
MATH 614 Dynamical Systems and Chaos Lecture 11: Maps of the circle.
 MATH 614 Dynamical Systems and Chaos Lecture 11: Maps of the circle. Circle S 1. S 1 = {(x,y) R 2 : x 2 + y 2 = 1} S 1 = {z C : z = 1} T 1 = R/Z T 1 = R/2πZ α : S 1 [0,2π), angular coordinate α : S 1 R/2πZ
MATH 614 Dynamical Systems and Chaos Lecture 11: Maps of the circle. Circle S 1. S 1 = {(x,y) R 2 : x 2 + y 2 = 1} S 1 = {z C : z = 1} T 1 = R/Z T 1 = R/2πZ α : S 1 [0,2π), angular coordinate α : S 1 R/2πZ
1/12/05: sec 3.1 and my article: How good is the Lebesgue measure?, Math. Intelligencer 11(2) (1989),
 (1989),") Real Analysis 2, Math 651, Spring 2005 April 26, 2005 1 Real Analysis 2, Math 651, Spring 2005 Krzysztof Chris Ciesielski 1/12/05: sec 3.1 and my article: How good is the Lebesgue measure?, Math. Intelligencer
Real Analysis 2, Math 651, Spring 2005 April 26, 2005 1 Real Analysis 2, Math 651, Spring 2005 Krzysztof Chris Ciesielski 1/12/05: sec 3.1 and my article: How good is the Lebesgue measure?, Math. Intelligencer
An adaptive subdivision technique for the approximation of attractors and invariant measures. Part II: Proof of convergence
 An adaptive subdivision technique for the approximation of attractors and invariant measures. Part II: Proof of convergence Oliver Junge Department of Mathematics and Computer Science University of Paderborn
An adaptive subdivision technique for the approximation of attractors and invariant measures. Part II: Proof of convergence Oliver Junge Department of Mathematics and Computer Science University of Paderborn
Lecture 4 Lebesgue spaces and inequalities
 Lecture 4: Lebesgue spaces and inequalities 1 of 10 Course: Theory of Probability I Term: Fall 2013 Instructor: Gordan Zitkovic Lecture 4 Lebesgue spaces and inequalities Lebesgue spaces We have seen how
Lecture 4: Lebesgue spaces and inequalities 1 of 10 Course: Theory of Probability I Term: Fall 2013 Instructor: Gordan Zitkovic Lecture 4 Lebesgue spaces and inequalities Lebesgue spaces We have seen how
ANALYSIS QUALIFYING EXAM FALL 2016: SOLUTIONS. = lim. F n
 ANALYSIS QUALIFYING EXAM FALL 206: SOLUTIONS Problem. Let m be Lebesgue measure on R. For a subset E R and r (0, ), define E r = { x R: dist(x, E) < r}. Let E R be compact. Prove that m(e) = lim m(e /n).
ANALYSIS QUALIFYING EXAM FALL 206: SOLUTIONS Problem. Let m be Lebesgue measure on R. For a subset E R and r (0, ), define E r = { x R: dist(x, E) < r}. Let E R be compact. Prove that m(e) = lim m(e /n).
The Banach Tarski Paradox and Amenability Lecture 20: Invariant Mean implies Reiter s Property. 11 October 2012
 The Banach Tarski Paradox and Amenability Lecture 20: Invariant Mean implies Reiter s Property 11 October 2012 Invariant means and amenability Definition Let be a locally compact group. An invariant mean
The Banach Tarski Paradox and Amenability Lecture 20: Invariant Mean implies Reiter s Property 11 October 2012 Invariant means and amenability Definition Let be a locally compact group. An invariant mean
Global minimization. Chapter Upper and lower bounds
 Chapter 1 Global minimization The issues related to the behavior of global minimization problems along a sequence of functionals F are by now well understood, and mainly rely on the concept of -limit.
Chapter 1 Global minimization The issues related to the behavior of global minimization problems along a sequence of functionals F are by now well understood, and mainly rely on the concept of -limit.
ULAM S METHOD FOR SOME NON-UNIFORMLY EXPANDING MAPS
 ULAM S METHOD FOR SOME NON-UNIFORMLY EXPANDING MAPS RUA MURRAY Abstract. Certain dynamical systems on the interval with indifferent fixed points admit invariant probability measures which are absolutely
ULAM S METHOD FOR SOME NON-UNIFORMLY EXPANDING MAPS RUA MURRAY Abstract. Certain dynamical systems on the interval with indifferent fixed points admit invariant probability measures which are absolutely
Coexistence of Zero and Nonzero Lyapunov Exponents
 Coexistence of Zero and Nonzero Lyapunov Exponents Jianyu Chen Pennsylvania State University July 13, 2011 Outline Notions and Background Hyperbolicity Coexistence Construction of M 5 Construction of the
Coexistence of Zero and Nonzero Lyapunov Exponents Jianyu Chen Pennsylvania State University July 13, 2011 Outline Notions and Background Hyperbolicity Coexistence Construction of M 5 Construction of the
Qualifying Exams I, Jan where µ is the Lebesgue measure on [0,1]. In this problems, all functions are assumed to be in L 1 [0,1].
![Qualifying Exams I, Jan where µ is the Lebesgue measure on [0,1]. In this problems, all functions are assumed to be in L 1 [0,1].](/thumbs/83/87073327.jpg "Qualifying Exams I, Jan where µ is the Lebesgue measure on [0,1]. In this problems, all functions are assumed to be in L 1 [0,1].") Qualifying Exams I, Jan. 213 1. (Real Analysis) Suppose f j,j = 1,2,... and f are real functions on [,1]. Define f j f in measure if and only if for any ε > we have lim µ{x [,1] : f j(x) f(x) > ε} = j
Qualifying Exams I, Jan. 213 1. (Real Analysis) Suppose f j,j = 1,2,... and f are real functions on [,1]. Define f j f in measure if and only if for any ε > we have lim µ{x [,1] : f j(x) f(x) > ε} = j
Dynamical Systems and Stochastic Processes.
 Dynamical Systems and Stochastic Processes. P. Collet Centre de Physique Théorique CNRS UMR 7644 Ecole Polytechnique F-91128 Palaiseau Cedex France e-mail: collet@cpht.polytechnique.fr April 23, 2008 Abstract
Dynamical Systems and Stochastic Processes. P. Collet Centre de Physique Théorique CNRS UMR 7644 Ecole Polytechnique F-91128 Palaiseau Cedex France e-mail: collet@cpht.polytechnique.fr April 23, 2008 Abstract
Physical measures of discretizations of generic diffeomorphisms
 Ergod. Th. & Dynam. Sys. (2018), 38, 1422 1458 doi:10.1017/etds.2016.70 c Cambridge University Press, 2016 Physical measures of discretizations of generic diffeomorphisms PIERRE-ANTOINE GUIHÉNEUF Université
Ergod. Th. & Dynam. Sys. (2018), 38, 1422 1458 doi:10.1017/etds.2016.70 c Cambridge University Press, 2016 Physical measures of discretizations of generic diffeomorphisms PIERRE-ANTOINE GUIHÉNEUF Université
Rigorous pointwise approximations for invariant densities of non-uniformly expanding maps
 Ergod. Th. & Dynam. Sys. 5, 35, 8 44 c Cambridge University Press, 4 doi:.7/etds.3.9 Rigorous pointwise approximations or invariant densities o non-uniormly expanding maps WAEL BAHSOUN, CHRISTOPHER BOSE
Ergod. Th. & Dynam. Sys. 5, 35, 8 44 c Cambridge University Press, 4 doi:.7/etds.3.9 Rigorous pointwise approximations or invariant densities o non-uniormly expanding maps WAEL BAHSOUN, CHRISTOPHER BOSE
Entropy production for a class of inverse SRB measures
 Entropy production for a class of inverse SRB measures Eugen Mihailescu and Mariusz Urbański Keywords: Inverse SRB measures, folded repellers, Anosov endomorphisms, entropy production. Abstract We study
Entropy production for a class of inverse SRB measures Eugen Mihailescu and Mariusz Urbański Keywords: Inverse SRB measures, folded repellers, Anosov endomorphisms, entropy production. Abstract We study
MAT 257, Handout 13: December 5-7, 2011.
 MAT 257, Handout 13: December 5-7, 2011. The Change of Variables Theorem. In these notes, I try to make more explicit some parts of Spivak s proof of the Change of Variable Theorem, and to supply most
MAT 257, Handout 13: December 5-7, 2011. The Change of Variables Theorem. In these notes, I try to make more explicit some parts of Spivak s proof of the Change of Variable Theorem, and to supply most
LYAPUNOV EXPONENTS AND STABILITY FOR THE STOCHASTIC DUFFING-VAN DER POL OSCILLATOR
 LYAPUNOV EXPONENTS AND STABILITY FOR THE STOCHASTIC DUFFING-VAN DER POL OSCILLATOR Peter H. Baxendale Department of Mathematics University of Southern California Los Angeles, CA 90089-3 USA baxendal@math.usc.edu
LYAPUNOV EXPONENTS AND STABILITY FOR THE STOCHASTIC DUFFING-VAN DER POL OSCILLATOR Peter H. Baxendale Department of Mathematics University of Southern California Los Angeles, CA 90089-3 USA baxendal@math.usc.edu
MATH 0350 PRACTICE FINAL FALL 2017 SAMUEL S. WATSON. a c. b c.
 MATH 35 PRACTICE FINAL FALL 17 SAMUEL S. WATSON Problem 1 Verify that if a and b are nonzero vectors, the vector c = a b + b a bisects the angle between a and b. The cosine of the angle between a and c
MATH 35 PRACTICE FINAL FALL 17 SAMUEL S. WATSON Problem 1 Verify that if a and b are nonzero vectors, the vector c = a b + b a bisects the angle between a and b. The cosine of the angle between a and c
University of Houston, Department of Mathematics Numerical Analysis, Fall 2005
 3 Numerical Solution of Nonlinear Equations and Systems 3.1 Fixed point iteration Reamrk 3.1 Problem Given a function F : lr n lr n, compute x lr n such that ( ) F(x ) = 0. In this chapter, we consider
3 Numerical Solution of Nonlinear Equations and Systems 3.1 Fixed point iteration Reamrk 3.1 Problem Given a function F : lr n lr n, compute x lr n such that ( ) F(x ) = 0. In this chapter, we consider
10. The ergodic theory of hyperbolic dynamical systems
 10. The ergodic theory of hyperbolic dynamical systems 10.1 Introduction In Lecture 8 we studied thermodynamic formalism for shifts of finite type by defining a suitable transfer operator acting on a certain
10. The ergodic theory of hyperbolic dynamical systems 10.1 Introduction In Lecture 8 we studied thermodynamic formalism for shifts of finite type by defining a suitable transfer operator acting on a certain
Lecture Notes Introduction to Ergodic Theory
 Lecture Notes Introduction to Ergodic Theory Tiago Pereira Department of Mathematics Imperial College London Our course consists of five introductory lectures on probabilistic aspects of dynamical systems,
Lecture Notes Introduction to Ergodic Theory Tiago Pereira Department of Mathematics Imperial College London Our course consists of five introductory lectures on probabilistic aspects of dynamical systems,
1. If 1, ω, ω 2, -----, ω 9 are the 10 th roots of unity, then (1 + ω) (1 + ω 2 ) (1 + ω 9 ) is A) 1 B) 1 C) 10 D) 0
 (1 + ω 2 ) (1 + ω 9 ) is A) 1 B) 1 C) 10 D) 0") 4 INUTES. If, ω, ω, -----, ω 9 are the th roots of unity, then ( + ω) ( + ω ) ----- ( + ω 9 ) is B) D) 5. i If - i = a + ib, then a =, b = B) a =, b = a =, b = D) a =, b= 3. Find the integral values for
4 INUTES. If, ω, ω, -----, ω 9 are the th roots of unity, then ( + ω) ( + ω ) ----- ( + ω 9 ) is B) D) 5. i If - i = a + ib, then a =, b = B) a =, b = a =, b = D) a =, b= 3. Find the integral values for
1 Assignment 1: Nonlinear dynamics (due September
 Assignment : Nonlinear dynamics (due September 4, 28). Consider the ordinary differential equation du/dt = cos(u). Sketch the equilibria and indicate by arrows the increase or decrease of the solutions.
Assignment : Nonlinear dynamics (due September 4, 28). Consider the ordinary differential equation du/dt = cos(u). Sketch the equilibria and indicate by arrows the increase or decrease of the solutions.
THEOREMS, ETC., FOR MATH 515
 THEOREMS, ETC., FOR MATH 515 Proposition 1 (=comment on page 17). If A is an algebra, then any finite union or finite intersection of sets in A is also in A. Proposition 2 (=Proposition 1.1). For every
THEOREMS, ETC., FOR MATH 515 Proposition 1 (=comment on page 17). If A is an algebra, then any finite union or finite intersection of sets in A is also in A. Proposition 2 (=Proposition 1.1). For every
Chernov Memorial Lectures
 Chernov Memorial Lectures Hyperbolic Billiards, a personal outlook. Lecture Two The functional analytic approach to Billiards Liverani Carlangelo Università di Roma Tor Vergata Penn State, 7 October 2017
Chernov Memorial Lectures Hyperbolic Billiards, a personal outlook. Lecture Two The functional analytic approach to Billiards Liverani Carlangelo Università di Roma Tor Vergata Penn State, 7 October 2017
Lozi-like maps. M. Misiurewicz and S. Štimac. May 13, 2017
 Lozi-like maps M. Misiurewicz and S. Štimac May 13, 017 Abstract We define a broad class of piecewise smooth plane homeomorphisms which have properties similar to the properties of Lozi maps, including
Lozi-like maps M. Misiurewicz and S. Štimac May 13, 017 Abstract We define a broad class of piecewise smooth plane homeomorphisms which have properties similar to the properties of Lozi maps, including
ON DIFFERENT WAYS OF CONSTRUCTING RELEVANT INVARIANT MEASURES
 UNIVERSITY OF JYVÄSKYLÄ DEPARTMENT OF MATHEMATICS AND STATISTICS REPORT 106 UNIVERSITÄT JYVÄSKYLÄ INSTITUT FÜR MATHEMATIK UND STATISTIK BERICHT 106 ON DIFFERENT WAYS OF CONSTRUCTING RELEVANT INVARIANT
UNIVERSITY OF JYVÄSKYLÄ DEPARTMENT OF MATHEMATICS AND STATISTICS REPORT 106 UNIVERSITÄT JYVÄSKYLÄ INSTITUT FÜR MATHEMATIK UND STATISTIK BERICHT 106 ON DIFFERENT WAYS OF CONSTRUCTING RELEVANT INVARIANT
Crew of25 Men Start Monday On Showboat. Many Permanent Improvements To Be Made;Project Under WPA
 U G G G U 2 93 YX Y q 25 3 < : z? 0 (? 8 0 G 936 x z x z? \ 9 7500 00? 5 q 938 27? 60 & 69? 937 q? G x? 937 69 58 } x? 88 G # x 8 > x G 0 G 0 x 8 x 0 U 93 6 ( 2 x : X 7 8 G G G q x U> x 0 > x < x G U 5
U G G G U 2 93 YX Y q 25 3 < : z? 0 (? 8 0 G 936 x z x z? \ 9 7500 00? 5 q 938 27? 60 & 69? 937 q? G x? 937 69 58 } x? 88 G # x 8 > x G 0 G 0 x 8 x 0 U 93 6 ( 2 x : X 7 8 G G G q x U> x 0 > x < x G U 5
CHAPTER 6. Differentiation
 CHPTER 6 Differentiation The generalization from elementary calculus of differentiation in measure theory is less obvious than that of integration, and the methods of treating it are somewhat involved.
CHPTER 6 Differentiation The generalization from elementary calculus of differentiation in measure theory is less obvious than that of integration, and the methods of treating it are somewhat involved.
Burgers equation in the complex plane. Govind Menon Division of Applied Mathematics Brown University
 Burgers equation in the complex plane Govind Menon Division of Applied Mathematics Brown University What this talk contains Interesting instances of the appearance of Burgers equation in the complex plane
Burgers equation in the complex plane Govind Menon Division of Applied Mathematics Brown University What this talk contains Interesting instances of the appearance of Burgers equation in the complex plane
Perturbed Gaussian Copula
 Perturbed Gaussian Copula Jean-Pierre Fouque Xianwen Zhou August 8, 6 Abstract Gaussian copula is by far the most popular copula used in the financial industry in default dependency modeling. However,
Perturbed Gaussian Copula Jean-Pierre Fouque Xianwen Zhou August 8, 6 Abstract Gaussian copula is by far the most popular copula used in the financial industry in default dependency modeling. However,
02. Measure and integral. 1. Borel-measurable functions and pointwise limits
 (October 3, 2017) 02. Measure and integral Paul Garrett garrett@math.umn.edu http://www.math.umn.edu/ garrett/ [This document is http://www.math.umn.edu/ garrett/m/real/notes 2017-18/02 measure and integral.pdf]
(October 3, 2017) 02. Measure and integral Paul Garrett garrett@math.umn.edu http://www.math.umn.edu/ garrett/ [This document is http://www.math.umn.edu/ garrett/m/real/notes 2017-18/02 measure and integral.pdf]