Inverse Kinematics From Position to Angles
|
|
|
- Edmund Dorsey
- 5 years ago
- Views:
Transcription
1 Invere Knemat From Poton to Ange
2 Invere Knemat Gven a dered poton P & orentaton R o the end-eetor Y,, z, O, A, T z q,, n Fnd the jont varabe whh an brng the robot to the dered onguraton.


3 Sovabt 0 Gven the numera vaue o we attempt to nd vaue o,,, n. The PUMA 560: T Gven 0 a 6 numera vaue, 6T ove or6 jont ange,,,, 6. equaton and 6 unnown 6 equaton and 6 unnown nonnear, tranendenta equaton
4 Invere Knemat More dut. The equaton to ove are nonnear thu temat oed-orm outon not awa avaabe. Souton not unque. Redundant robot. Ebow-up/ebow-down onguraton. Robot dependent. outon!
5 The Worpae Worpae: voume o pae whh an be reahed b the end eetor Detrou worpae: voume o pae where the end eetor an be arbtrar orented Reahabe worpae: voume o pae whh the robot an reah n at eat one orentaton


6 Two-n manpuator I = reahabe wor pae a d o radu. The detrou Worpae a pont: orgn I there no detrou worpae. The reahabe wor pae a rng o outer radu + and nner radu -
7 Etene o Souton A outon to the IKP et the target beong to the worpae. Worpae omputaton ma be hard. In prate t made ea b pea degn o the robot.
8 Method o Souton A manpuator ovabe the jont varabe an be determned b an agorthm. The agorthm houd nd a pobe outon. Souton oed orm outon numera outon
9 umera Souton Reut n a numera, teratve outon to tem o equaton, or eampe ewton/raphon tehnque. Unnown number o operaton to ove. On return a nge outon. Aura dtated b uer. Beaue o thee reaon, th muh e derabe than a oed-orm outon. Can be apped to a robot.
10 Coed-orm outon Anata outon to tem o equaton Can be oved n a ed number o operaton thereore, omputatona at/nown peed Reut n a pobe outon to the manpuator nemat Oten dut or mpobe to nd Mot derabe or rea-tme ontro Mot derabe overa
11 Invere Knemat Probem Gven: Poton & Orentaton Fnd: jont oordnate o ED-EFFECTOR 0 T q, q, q 3,, q eed to ove at mot ndependent equaton n unnown.
12 Invere Knemat Probem ISSUES Etene o outon Worpae Detrou Worpae Le than 6 jont Jont mt prata Mutpe outon Crtera Agebra Sovabt oed orm numera Geometr number o outon = 6 d, r 0 or pont
13 Souton To Invere Knemat 0 T = 0 T T T 3 - T = A A A 3 A Gven: 0 T n n nz o o o z a a a z p p A p z θ -θ θ d θ θ θ - θ d θ r Fnd: q = q, q, q 3,, q jont oordnate
14 Souton To Invere Knemat 3 z z z z...a A A A p a o n p a o n p a o n Equaton 6 ndependent 6 redundant unnown LHS,j = RHS,j row =,, 3 oumn j =,, 3, 4
15 Souton To Invere Knemat Genera Approah: Ioate one jont varabe at a tme A - 0 T = A A 3 A = T unton o q unton o q,, q Loo or ontant eement n T Equate LHS,j = RHS,j Sove or q
16 Souton To Invere Knemat A - A -0 T = A 3 A = T unton o q 3,, q unton o q, q on one unnown q ne q ha been oved or Loo or ontant eement o T Equate LHS,j = RHS,j Sove or q Mabe an nd equaton nvovng q on ote: There no agorthm approah that 00% eetve Geometr ntuton requred
17 A Smpe Eampe Revoute and Prmat Jont Combned, Fndng : θ artan More Spea: θ artan artan pee that t n the rt quadrant Y S Fndng S: X S
18 Invere Knemat o a Two Ln Manpuator, Gven:,,, Fnd:, Redundan: A unque outon to th probem doe not et. ote, that ung the gven two outon are pobe. Sometme no outon pobe.,
19 The Geometr Souton,
20 The Geometr Souton, Ung the Law o Cone: aro θ oθ oθ θ o80 θ o80 o C ab b a Ung the Law o Cone: artan α α θ θ nθ θ n80 nθ n n C b B artan nθ arn θ Redundant ne oud be n the rt or ourth quadrant. Redundan aued ne ha two pobe vaue
21 The Agebra Souton,
22 aro θ n n n The Agebra Souton, θ θ θ 3 n θ o θ o θ On Unnown n o o n n n n o o o : b a b a b a b a b a b a ote
23 n o n o n n n o o o : a b b a b a b a b a b a ote n We now what rom the prevou de. We need to ove or. ow we have two equaton and two unnown n and o Subttutng or and mpng man tme ote th the aw o one and an be repaed b + arn θ

24 Invere Knemat Anata outon on wor or a ar mpe truture umera/teratve outon needed or a ompe truture
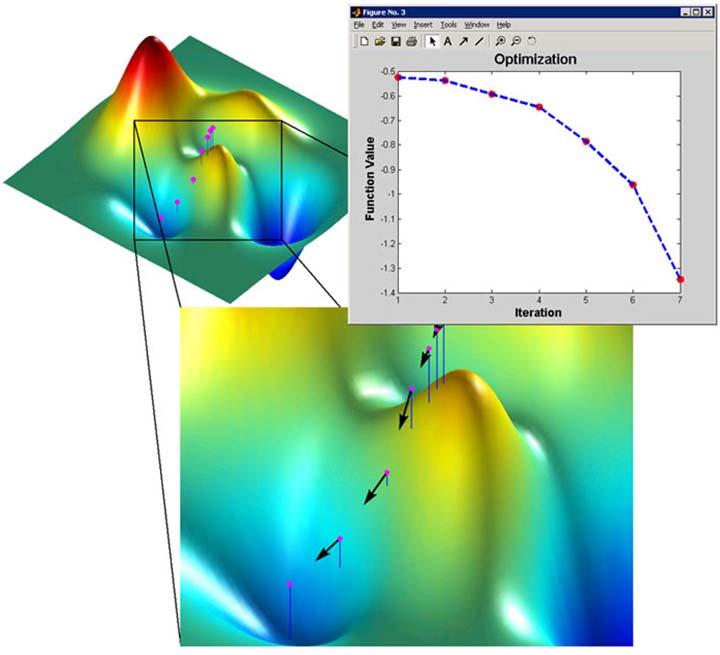
25 umera Approahe Invere nemat an be ormuated a an optmzaton probem
26 Funton Optmzaton Fndng the mnmum or nonnear unton
27 Formuaton So how to onvert the IK proe n an optmzaton unton? arg mn F θ θ θ C=C,C Bae 0,0
28 Iteratve Approahe Fnd the jont ange θ that mnmze the dtane between the hpothezed harater poton and uer peed poton arg mn C hpothezed poton peed poton θ θ θ C=C,C Bae 0,0

29 Iteratve Approahe Fnd the jont ange θ that mnmze the dtane between the hpothezed harater poton and uer peed poton arg mn, o o n n θ θ θ C=, Bae 0,0
30 Iteratve Approahe Mathemata, we an ormuate th a an optmzaton probem: arg mn The above probem an be oved b man nonnear optmzaton agorthm: - Steepet deent - Gau-newton - Levenberg-marquardt, et
31 Gradent-baed Optmzaton
32 Gau-ewton Approah Step : ntaze the jont ange wth 0 Step : update the jont ange:
33 Gau-ewton Approah Step : ntaze the jont ange wth 0 Step : update the jont ange: How an we dede the amount o update?
34 Gau-ewton Approah Step : ntaze the jont ange wth 0 Step : update the jont ange: arg mn
35 Gau-ewton Approah Step : ntaze the jont ange wth 0 Step : update the jont ange: arg mn Known!
36 Gau-ewton Approah Step : ntaze the jont ange wth 0 Step : update the jont ange: arg mn Taor ere epanon
37 Gau-ewton Approah Step : ntaze the jont ange wth Step : update the jont ange: mn arg mn arg 0 Taor ere epanon rearrange
38 Gau-ewton Approah Step : ntaze the jont ange wth Step : update the jont ange: mn arg mn arg 0 Taor ere epanon rearrange Can ou ove th optmzaton probem?
39 Gau-ewton Approah Step : ntaze the jont ange wth Step : update the jont ange: mn arg mn arg mn arg 0 Taor ere epanon rearrange Th a quadrat unton o
40 Gau-ewton Approah Optmzng an quadrat unton ea It ha an optma vaue when the gradent zero,...,,...,,..., M M M mn arg
41 Gau-ewton Approah Optmzng an quadrat unton ea It ha an optma vaue when the gradent zero,...,,...,,..., M M M mn arg b J Δθ Lnear equaton!
42 Gau-ewton Approah Optmzng an quadrat unton ea It ha an optma vaue when the gradent zero,...,,...,,..., M M M mn arg b J Δθ
43 Gau-ewton Approah Optmzng an quadrat unton ea It ha an optma vaue when the gradent zero,...,,...,,..., M M M mn arg b J Δθ b J J J T T
Jacobians: Velocities and Static Force.
 Jaoban: Veote and Stat Fore mrkabr Unerty o ehnoogy Computer Engneerng Inormaton ehnoogy Department http://e.aut.a.r/~hry/eture/robot-4/robot4.htm Derentaton o poton etor Derate o a etor: V Q d dt Q m
Jaoban: Veote and Stat Fore mrkabr Unerty o ehnoogy Computer Engneerng Inormaton ehnoogy Department http://e.aut.a.r/~hry/eture/robot-4/robot4.htm Derentaton o poton etor Derate o a etor: V Q d dt Q m
Numerical integration in more dimensions part 2. Remo Minero
 Numerca ntegraton n more dmensons part Remo Mnero Outne The roe of a mappng functon n mutdmensona ntegraton Gauss approach n more dmensons and quadrature rues Crtca anass of acceptabt of a gven quadrature
Numerca ntegraton n more dmensons part Remo Mnero Outne The roe of a mappng functon n mutdmensona ntegraton Gauss approach n more dmensons and quadrature rues Crtca anass of acceptabt of a gven quadrature
MARKOV CHAIN AND HIDDEN MARKOV MODEL
 MARKOV CHAIN AND HIDDEN MARKOV MODEL JIAN ZHANG JIANZHAN@STAT.PURDUE.EDU Markov chan and hdden Markov mode are probaby the smpest modes whch can be used to mode sequenta data,.e. data sampes whch are not
MARKOV CHAIN AND HIDDEN MARKOV MODEL JIAN ZHANG JIANZHAN@STAT.PURDUE.EDU Markov chan and hdden Markov mode are probaby the smpest modes whch can be used to mode sequenta data,.e. data sampes whch are not
IV. Performance Optimization
 IV. Performance Optmzaton A. Steepest descent algorthm defnton how to set up bounds on learnng rate mnmzaton n a lne (varyng learnng rate) momentum learnng examples B. Newton s method defnton Gauss-Newton
IV. Performance Optmzaton A. Steepest descent algorthm defnton how to set up bounds on learnng rate mnmzaton n a lne (varyng learnng rate) momentum learnng examples B. Newton s method defnton Gauss-Newton
Boundary Value Problems. Lecture Objectives. Ch. 27
 Boundar Vaue Probes Ch. 7 Lecture Obectves o understand the dfference between an nta vaue and boundar vaue ODE o be abe to understand when and how to app the shootng ethod and FD ethod. o understand what
Boundar Vaue Probes Ch. 7 Lecture Obectves o understand the dfference between an nta vaue and boundar vaue ODE o be abe to understand when and how to app the shootng ethod and FD ethod. o understand what
Example: Suppose we want to build a classifier that recognizes WebPages of graduate students.
 Exampe: Suppose we want to bud a cassfer that recognzes WebPages of graduate students. How can we fnd tranng data? We can browse the web and coect a sampe of WebPages of graduate students of varous unverstes.
Exampe: Suppose we want to bud a cassfer that recognzes WebPages of graduate students. How can we fnd tranng data? We can browse the web and coect a sampe of WebPages of graduate students of varous unverstes.
Deriving the Dual. Prof. Bennett Math of Data Science 1/13/06
 Dervng the Dua Prof. Bennett Math of Data Scence /3/06 Outne Ntty Grtty for SVM Revew Rdge Regresson LS-SVM=KRR Dua Dervaton Bas Issue Summary Ntty Grtty Need Dua of w, b, z w 2 2 mn st. ( x w ) = C z
Dervng the Dua Prof. Bennett Math of Data Scence /3/06 Outne Ntty Grtty for SVM Revew Rdge Regresson LS-SVM=KRR Dua Dervaton Bas Issue Summary Ntty Grtty Need Dua of w, b, z w 2 2 mn st. ( x w ) = C z
Cyclic Codes BCH Codes
 Cycc Codes BCH Codes Gaos Feds GF m A Gaos fed of m eements can be obtaned usng the symbos 0,, á, and the eements beng 0,, á, á, á 3 m,... so that fed F* s cosed under mutpcaton wth m eements. The operator
Cycc Codes BCH Codes Gaos Feds GF m A Gaos fed of m eements can be obtaned usng the symbos 0,, á, and the eements beng 0,, á, á, á 3 m,... so that fed F* s cosed under mutpcaton wth m eements. The operator
Generalized Linear Methods
 Generalzed Lnear Methods 1 Introducton In the Ensemble Methods the general dea s that usng a combnaton of several weak learner one could make a better learner. More formally, assume that we have a set
Generalzed Lnear Methods 1 Introducton In the Ensemble Methods the general dea s that usng a combnaton of several weak learner one could make a better learner. More formally, assume that we have a set
Associative Memories
 Assocatve Memores We consder now modes for unsupervsed earnng probems, caed auto-assocaton probems. Assocaton s the task of mappng patterns to patterns. In an assocatve memory the stmuus of an ncompete
Assocatve Memores We consder now modes for unsupervsed earnng probems, caed auto-assocaton probems. Assocaton s the task of mappng patterns to patterns. In an assocatve memory the stmuus of an ncompete
Multicommodity Distribution System Design
 Mummodt strbun stem esgn Consder the probem where ommodtes are produed and shpped from pants through potenta dstrbun enters C usmers. Pants C Cosmers Mummodt strbun stem esgn Consder the probem where ommodtes
Mummodt strbun stem esgn Consder the probem where ommodtes are produed and shpped from pants through potenta dstrbun enters C usmers. Pants C Cosmers Mummodt strbun stem esgn Consder the probem where ommodtes
Mean Field / Variational Approximations
 Mean Feld / Varatonal Appromatons resented by Jose Nuñez 0/24/05 Outlne Introducton Mean Feld Appromaton Structured Mean Feld Weghted Mean Feld Varatonal Methods Introducton roblem: We have dstrbuton but
Mean Feld / Varatonal Appromatons resented by Jose Nuñez 0/24/05 Outlne Introducton Mean Feld Appromaton Structured Mean Feld Weghted Mean Feld Varatonal Methods Introducton roblem: We have dstrbuton but
CIS526: Machine Learning Lecture 3 (Sept 16, 2003) Linear Regression. Preparation help: Xiaoying Huang. x 1 θ 1 output... θ M x M
 Linear Regression. Preparation help: Xiaoying Huang. x 1 θ 1 output... θ M x M") CIS56: achne Learnng Lecture 3 (Sept 6, 003) Preparaton help: Xaoyng Huang Lnear Regresson Lnear regresson can be represented by a functonal form: f(; θ) = θ 0 0 +θ + + θ = θ = 0 ote: 0 s a dummy attrbute
CIS56: achne Learnng Lecture 3 (Sept 6, 003) Preparaton help: Xaoyng Huang Lnear Regresson Lnear regresson can be represented by a functonal form: f(; θ) = θ 0 0 +θ + + θ = θ = 0 ote: 0 s a dummy attrbute
Homework Math 180: Introduction to GR Temple-Winter (3) Summarize the article:
 Summarize the article:") Homework Math 80: Introduton to GR Temple-Wnter 208 (3) Summarze the artle: https://www.udas.edu/news/dongwthout-dark-energy/ (4) Assume only the transformaton laws for etors. Let X P = a = a α y = Y α
Homework Math 80: Introduton to GR Temple-Wnter 208 (3) Summarze the artle: https://www.udas.edu/news/dongwthout-dark-energy/ (4) Assume only the transformaton laws for etors. Let X P = a = a α y = Y α
Nonlinear optimization and applications
 Nonlnear optzaton and applaton CSI 747 / MAH 689 Intrutor: I. Grva Wedneda 7: : p Contraned optzaton proble : R n R n X I E X Inequalt ontrant I { n R :... } Equalt ontrant E { n R :... p} Equalt ontrant....t.
Nonlnear optzaton and applaton CSI 747 / MAH 689 Intrutor: I. Grva Wedneda 7: : p Contraned optzaton proble : R n R n X I E X Inequalt ontrant I { n R :... } Equalt ontrant E { n R :... p} Equalt ontrant....t.
Section 8.3 Polar Form of Complex Numbers
 80 Chapter 8 Secton 8 Polar Form of Complex Numbers From prevous classes, you may have encountered magnary numbers the square roots of negatve numbers and, more generally, complex numbers whch are the
80 Chapter 8 Secton 8 Polar Form of Complex Numbers From prevous classes, you may have encountered magnary numbers the square roots of negatve numbers and, more generally, complex numbers whch are the
A General Column Generation Algorithm Applied to System Reliability Optimization Problems
 A Genera Coumn Generaton Agorthm Apped to System Reabty Optmzaton Probems Lea Za, Davd W. Cot, Department of Industra and Systems Engneerng, Rutgers Unversty, Pscataway, J 08854, USA Abstract A genera
A Genera Coumn Generaton Agorthm Apped to System Reabty Optmzaton Probems Lea Za, Davd W. Cot, Department of Industra and Systems Engneerng, Rutgers Unversty, Pscataway, J 08854, USA Abstract A genera
HO 40 Solutions ( ) ˆ. j, and B v. F m x 10-3 kg = i + ( 4.19 x 10 4 m/s)ˆ. (( )ˆ i + ( 4.19 x 10 4 m/s )ˆ j ) ( 1.40 T )ˆ k.
 ˆ. j, and B v. F m x 10-3 kg = i + ( 4.19 x 10 4 m/s)ˆ. (( )ˆ i + ( 4.19 x 10 4 m/s )ˆ j ) ( 1.40 T )ˆ k.") .) m.8 x -3 g, q. x -8 C, ( 3. x 5 m/)ˆ, and (.85 T)ˆ The magnetc force : F q (. x -8 C) ( 3. x 5 m/)ˆ (.85 T)ˆ F.98 x -3 N F ma ( ˆ ˆ ) (.98 x -3 N) ˆ o a HO 4 Soluton F m (.98 x -3 N)ˆ.8 x -3 g.65 m.98
.) m.8 x -3 g, q. x -8 C, ( 3. x 5 m/)ˆ, and (.85 T)ˆ The magnetc force : F q (. x -8 C) ( 3. x 5 m/)ˆ (.85 T)ˆ F.98 x -3 N F ma ( ˆ ˆ ) (.98 x -3 N) ˆ o a HO 4 Soluton F m (.98 x -3 N)ˆ.8 x -3 g.65 m.98
CS4495/6495 Introduction to Computer Vision. 3C-L3 Calibrating cameras
 CS4495/6495 Introducton to Computer Vson 3C-L3 Calbratng cameras Fnally (last tme): Camera parameters Projecton equaton the cumulatve effect of all parameters: M (3x4) f s x ' 1 0 0 0 c R 0 I T 3 3 3 x1
CS4495/6495 Introducton to Computer Vson 3C-L3 Calbratng cameras Fnally (last tme): Camera parameters Projecton equaton the cumulatve effect of all parameters: M (3x4) f s x ' 1 0 0 0 c R 0 I T 3 3 3 x1
OPTIMISATION. Introduction Single Variable Unconstrained Optimisation Multivariable Unconstrained Optimisation Linear Programming
 OPTIMIATION Introducton ngle Varable Unconstraned Optmsaton Multvarable Unconstraned Optmsaton Lnear Programmng Chapter Optmsaton /. Introducton In an engneerng analss, sometmes etremtes, ether mnmum or
OPTIMIATION Introducton ngle Varable Unconstraned Optmsaton Multvarable Unconstraned Optmsaton Lnear Programmng Chapter Optmsaton /. Introducton In an engneerng analss, sometmes etremtes, ether mnmum or
[WAVES] 1. Waves and wave forces. Definition of waves
![[WAVES] 1. Waves and wave forces. Definition of waves](/thumbs/94/120548750.jpg "[WAVES] 1. Waves and wave forces. Definition of waves") 1. Waves and forces Defnton of s In the smuatons on ong-crested s are consdered. The drecton of these s (μ) s defned as sketched beow n the goba co-ordnate sstem: North West East South The eevaton can
1. Waves and forces Defnton of s In the smuatons on ong-crested s are consdered. The drecton of these s (μ) s defned as sketched beow n the goba co-ordnate sstem: North West East South The eevaton can
EXCE, steepest descent, conjugate gradient & BFGS
 Club Cast3M, 21th of November 2008 An amazng optmsaton problem P. Pegon & Ph. Capéran European Laboratory for Structural Assessment Jont Research Centre Ispra, Italy An amazng optmsaton problem OUTLINE:
Club Cast3M, 21th of November 2008 An amazng optmsaton problem P. Pegon & Ph. Capéran European Laboratory for Structural Assessment Jont Research Centre Ispra, Italy An amazng optmsaton problem OUTLINE:
Harmonic oscillator approximation
 armonc ocllator approxmaton armonc ocllator approxmaton Euaton to be olved We are fndng a mnmum of the functon under the retrcton where W P, P,..., P, Q, Q,..., Q P, P,..., P, Q, Q,..., Q lnwgner functon
armonc ocllator approxmaton armonc ocllator approxmaton Euaton to be olved We are fndng a mnmum of the functon under the retrcton where W P, P,..., P, Q, Q,..., Q P, P,..., P, Q, Q,..., Q lnwgner functon
ScienceDirect. Development of the System of Telecontrol by the Multilink Manipulator Installed on the Mobile Robot
 vaabe onne at www.enedret.om SeneDret roeda Engneerng 7 77 th D Internatona Sympoum on Integent anufaturng and utomaton, D Deveopment of the Sytem of Teeontro by the utnk anpuator Intaed on the obe obot
vaabe onne at www.enedret.om SeneDret roeda Engneerng 7 77 th D Internatona Sympoum on Integent anufaturng and utomaton, D Deveopment of the Sytem of Teeontro by the utnk anpuator Intaed on the obe obot
p 1 c 2 + p 2 c 2 + p 3 c p m c 2
 Where to put a faclty? Gven locatons p 1,..., p m n R n of m houses, want to choose a locaton c n R n for the fre staton. Want c to be as close as possble to all the house. We know how to measure dstance
Where to put a faclty? Gven locatons p 1,..., p m n R n of m houses, want to choose a locaton c n R n for the fre staton. Want c to be as close as possble to all the house. We know how to measure dstance
Supervised Learning. Neural Networks and Back-Propagation Learning. Credit Assignment Problem. Feedforward Network. Adaptive System.
 Part 7: Neura Networ & earnng /2/05 Superved earnng Neura Networ and Bac-Propagaton earnng Produce dered output for tranng nput Generaze reaonaby & appropratey to other nput Good exampe: pattern recognton
Part 7: Neura Networ & earnng /2/05 Superved earnng Neura Networ and Bac-Propagaton earnng Produce dered output for tranng nput Generaze reaonaby & appropratey to other nput Good exampe: pattern recognton
COMPLEX NUMBERS AND QUADRATIC EQUATIONS
 COMPLEX NUMBERS AND QUADRATIC EQUATIONS INTRODUCTION We know that x 0 for all x R e the square of a real number (whether postve, negatve or ero) s non-negatve Hence the equatons x, x, x + 7 0 etc are not
COMPLEX NUMBERS AND QUADRATIC EQUATIONS INTRODUCTION We know that x 0 for all x R e the square of a real number (whether postve, negatve or ero) s non-negatve Hence the equatons x, x, x + 7 0 etc are not
LECTURE 21 Mohr s Method for Calculation of General Displacements. 1 The Reciprocal Theorem
 V. DEMENKO MECHANICS OF MATERIALS 05 LECTURE Mohr s Method for Cacuaton of Genera Dspacements The Recproca Theorem The recproca theorem s one of the genera theorems of strength of materas. It foows drect
V. DEMENKO MECHANICS OF MATERIALS 05 LECTURE Mohr s Method for Cacuaton of Genera Dspacements The Recproca Theorem The recproca theorem s one of the genera theorems of strength of materas. It foows drect
Small signal analysis
 Small gnal analy. ntroducton Let u conder the crcut hown n Fg., where the nonlnear retor decrbed by the equaton g v havng graphcal repreentaton hown n Fg.. ( G (t G v(t v Fg. Fg. a D current ource wherea
Small gnal analy. ntroducton Let u conder the crcut hown n Fg., where the nonlnear retor decrbed by the equaton g v havng graphcal repreentaton hown n Fg.. ( G (t G v(t v Fg. Fg. a D current ource wherea
Dynamic Analysis Of An Off-Road Vehicle Frame
 Proceedngs of the 8th WSEAS Int. Conf. on NON-LINEAR ANALYSIS, NON-LINEAR SYSTEMS AND CHAOS Dnamc Anass Of An Off-Road Vehce Frame ŞTEFAN TABACU, NICOLAE DORU STĂNESCU, ION TABACU Automotve Department,
Proceedngs of the 8th WSEAS Int. Conf. on NON-LINEAR ANALYSIS, NON-LINEAR SYSTEMS AND CHAOS Dnamc Anass Of An Off-Road Vehce Frame ŞTEFAN TABACU, NICOLAE DORU STĂNESCU, ION TABACU Automotve Department,
Research on Complex Networks Control Based on Fuzzy Integral Sliding Theory
 Advanced Scence and Technoogy Letters Vo.83 (ISA 205), pp.60-65 http://dx.do.org/0.4257/ast.205.83.2 Research on Compex etworks Contro Based on Fuzzy Integra Sdng Theory Dongsheng Yang, Bngqng L, 2, He
Advanced Scence and Technoogy Letters Vo.83 (ISA 205), pp.60-65 http://dx.do.org/0.4257/ast.205.83.2 Research on Compex etworks Contro Based on Fuzzy Integra Sdng Theory Dongsheng Yang, Bngqng L, 2, He
Neural networks. Nuno Vasconcelos ECE Department, UCSD
 Neural networs Nuno Vasconcelos ECE Department, UCSD Classfcaton a classfcaton problem has two types of varables e.g. X - vector of observatons (features) n the world Y - state (class) of the world x X
Neural networs Nuno Vasconcelos ECE Department, UCSD Classfcaton a classfcaton problem has two types of varables e.g. X - vector of observatons (features) n the world Y - state (class) of the world x X
Research Article H Estimates for Discrete-Time Markovian Jump Linear Systems
 Mathematca Probems n Engneerng Voume 213 Artce ID 945342 7 pages http://dxdoorg/11155/213/945342 Research Artce H Estmates for Dscrete-Tme Markovan Jump Lnear Systems Marco H Terra 1 Gdson Jesus 2 and
Mathematca Probems n Engneerng Voume 213 Artce ID 945342 7 pages http://dxdoorg/11155/213/945342 Research Artce H Estmates for Dscrete-Tme Markovan Jump Lnear Systems Marco H Terra 1 Gdson Jesus 2 and
Homework 9 for BST 631: Statistical Theory I Problems, 11/02/2006
 Due Tme: 5:00PM Thursda, on /09/006 Problem (8 ponts) Book problem 45 Let U = X + and V = X, then the jont pmf of ( UV, ) s θ λ θ e λ e f( u, ) = ( = 0, ; u =, +, )! ( u )! Then f( u, ) u θ λ f ( x x+
Due Tme: 5:00PM Thursda, on /09/006 Problem (8 ponts) Book problem 45 Let U = X + and V = X, then the jont pmf of ( UV, ) s θ λ θ e λ e f( u, ) = ( = 0, ; u =, +, )! ( u )! Then f( u, ) u θ λ f ( x x+
Multi-joint kinematics and dynamics
 ut-ont nematcs and dnamcs Emo odorov pped athematcs omputer Scence and Engneerng Unverst o Washngton Knematcs n generazed vs. artesan coordnates generazed artesan dm() euas the number o degrees o reedom
ut-ont nematcs and dnamcs Emo odorov pped athematcs omputer Scence and Engneerng Unverst o Washngton Knematcs n generazed vs. artesan coordnates generazed artesan dm() euas the number o degrees o reedom
Dynamic Programming. Preview. Dynamic Programming. Dynamic Programming. Dynamic Programming (Example: Fibonacci Sequence)
") /24/27 Prevew Fbonacc Sequence Longest Common Subsequence Dynamc programmng s a method for solvng complex problems by breakng them down nto smpler sub-problems. It s applcable to problems exhbtng the propertes
/24/27 Prevew Fbonacc Sequence Longest Common Subsequence Dynamc programmng s a method for solvng complex problems by breakng them down nto smpler sub-problems. It s applcable to problems exhbtng the propertes
Pattern Classification
 Pattern Classfcaton All materals n these sldes ere taken from Pattern Classfcaton (nd ed) by R. O. Duda, P. E. Hart and D. G. Stork, John Wley & Sons, 000 th the permsson of the authors and the publsher
Pattern Classfcaton All materals n these sldes ere taken from Pattern Classfcaton (nd ed) by R. O. Duda, P. E. Hart and D. G. Stork, John Wley & Sons, 000 th the permsson of the authors and the publsher
Additional File 1 - Detailed explanation of the expression level CPD
 Addtonal Fle - Detaled explanaton of the expreon level CPD A mentoned n the man text, the man CPD for the uterng model cont of two ndvdual factor: P( level gen P( level gen P ( level gen 2 (.).. CPD factor
Addtonal Fle - Detaled explanaton of the expreon level CPD A mentoned n the man text, the man CPD for the uterng model cont of two ndvdual factor: P( level gen P( level gen P ( level gen 2 (.).. CPD factor
Outline and Reading. Dynamic Programming. Dynamic Programming revealed. Computing Fibonacci. The General Dynamic Programming Technique
 Outlne and Readng Dynamc Programmng The General Technque ( 5.3.2) -1 Knapsac Problem ( 5.3.3) Matrx Chan-Product ( 5.3.1) Dynamc Programmng verson 1.4 1 Dynamc Programmng verson 1.4 2 Dynamc Programmng
Outlne and Readng Dynamc Programmng The General Technque ( 5.3.2) -1 Knapsac Problem ( 5.3.3) Matrx Chan-Product ( 5.3.1) Dynamc Programmng verson 1.4 1 Dynamc Programmng verson 1.4 2 Dynamc Programmng
Problem Points Score Total 100
 Physcs 450 Solutons of Sample Exam I Problem Ponts Score 1 8 15 3 17 4 0 5 0 Total 100 All wor must be shown n order to receve full credt. Wor must be legble and comprehensble wth answers clearly ndcated.
Physcs 450 Solutons of Sample Exam I Problem Ponts Score 1 8 15 3 17 4 0 5 0 Total 100 All wor must be shown n order to receve full credt. Wor must be legble and comprehensble wth answers clearly ndcated.
Strain Energy in Linear Elastic Solids
 Duke Unverst Department of Cv and Envronmenta Engneerng CEE 41L. Matr Structura Anass Fa, Henr P. Gavn Stran Energ n Lnear Eastc Sods Consder a force, F, apped gradua to a structure. Let D be the resutng
Duke Unverst Department of Cv and Envronmenta Engneerng CEE 41L. Matr Structura Anass Fa, Henr P. Gavn Stran Energ n Lnear Eastc Sods Consder a force, F, apped gradua to a structure. Let D be the resutng
n α j x j = 0 j=1 has a nontrivial solution. Here A is the n k matrix whose jth column is the vector for all t j=0
 MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
MODULE 2 Topcs: Lnear ndependence, bass and dmenson We have seen that f n a set of vectors one vector s a lnear combnaton of the remanng vectors n the set then the span of the set s unchanged f that vector
EEL 6266 Power System Operation and Control. Chapter 3 Economic Dispatch Using Dynamic Programming
 EEL 6266 Power System Operaton and Control Chapter 3 Economc Dspatch Usng Dynamc Programmng Pecewse Lnear Cost Functons Common practce many utltes prefer to represent ther generator cost functons as sngle-
EEL 6266 Power System Operaton and Control Chapter 3 Economc Dspatch Usng Dynamc Programmng Pecewse Lnear Cost Functons Common practce many utltes prefer to represent ther generator cost functons as sngle-
Calculation of time complexity (3%)
") Problem 1. (30%) Calculaton of tme complexty (3%) Gven n ctes, usng exhaust search to see every result takes O(n!). Calculaton of tme needed to solve the problem (2%) 40 ctes:40! dfferent tours 40 add
Problem 1. (30%) Calculaton of tme complexty (3%) Gven n ctes, usng exhaust search to see every result takes O(n!). Calculaton of tme needed to solve the problem (2%) 40 ctes:40! dfferent tours 40 add
Vector Norms. Chapter 7 Iterative Techniques in Matrix Algebra. Cauchy-Bunyakovsky-Schwarz Inequality for Sums. Distances. Convergence.
 Vector Norms Chapter 7 Iteratve Technques n Matrx Algebra Per-Olof Persson persson@berkeley.edu Department of Mathematcs Unversty of Calforna, Berkeley Math 128B Numercal Analyss Defnton A vector norm
Vector Norms Chapter 7 Iteratve Technques n Matrx Algebra Per-Olof Persson persson@berkeley.edu Department of Mathematcs Unversty of Calforna, Berkeley Math 128B Numercal Analyss Defnton A vector norm
Exercises of Fundamentals of Chemical Processes
 Department of Energ Poltecnco d Mlano a Lambruschn 4 2056 MILANO Exercses of undamentals of Chemcal Processes Prof. Ganpero Gropp Exercse 7 ) Estmaton of the composton of the streams at the ext of an sothermal
Department of Energ Poltecnco d Mlano a Lambruschn 4 2056 MILANO Exercses of undamentals of Chemcal Processes Prof. Ganpero Gropp Exercse 7 ) Estmaton of the composton of the streams at the ext of an sothermal
Lecture Notes on Linear Regression
 Lecture Notes on Lnear Regresson Feng L fl@sdueducn Shandong Unversty, Chna Lnear Regresson Problem In regresson problem, we am at predct a contnuous target value gven an nput feature vector We assume
Lecture Notes on Lnear Regresson Feng L fl@sdueducn Shandong Unversty, Chna Lnear Regresson Problem In regresson problem, we am at predct a contnuous target value gven an nput feature vector We assume
Chapter 6 Hidden Markov Models. Chaochun Wei Spring 2018
 896 920 987 2006 Chapter 6 Hdden Markov Modes Chaochun We Sprng 208 Contents Readng materas Introducton to Hdden Markov Mode Markov chans Hdden Markov Modes Parameter estmaton for HMMs 2 Readng Rabner,
896 920 987 2006 Chapter 6 Hdden Markov Modes Chaochun We Sprng 208 Contents Readng materas Introducton to Hdden Markov Mode Markov chans Hdden Markov Modes Parameter estmaton for HMMs 2 Readng Rabner,
Optimal Design of Multi-loop PI Controllers for Enhanced Disturbance Rejection in Multivariable Processes
 Proeedng of the 3rd WSEAS/IASME Internatonal Conferene on Dynamal Sytem and Control, Arahon, Frane, Otober 3-5, 2007 72 Optmal Degn of Mult-loop PI Controller for Enhaned Dturbane Rejeton n Multvarable
Proeedng of the 3rd WSEAS/IASME Internatonal Conferene on Dynamal Sytem and Control, Arahon, Frane, Otober 3-5, 2007 72 Optmal Degn of Mult-loop PI Controller for Enhaned Dturbane Rejeton n Multvarable
Example: (13320, 22140) =? Solution #1: The divisors of are 1, 2, 3, 4, 5, 6, 9, 10, 12, 15, 18, 20, 27, 30, 36, 41,
 =? Solution #1: The divisors of are 1, 2, 3, 4, 5, 6, 9, 10, 12, 15, 18, 20, 27, 30, 36, 41,") The greatest common dvsor of two ntegers a and b (not both zero) s the largest nteger whch s a common factor of both a and b. We denote ths number by gcd(a, b), or smply (a, b) when there s no confuson
The greatest common dvsor of two ntegers a and b (not both zero) s the largest nteger whch s a common factor of both a and b. We denote ths number by gcd(a, b), or smply (a, b) when there s no confuson
Logistic Regression. CAP 5610: Machine Learning Instructor: Guo-Jun QI
 Logstc Regresson CAP 561: achne Learnng Instructor: Guo-Jun QI Bayes Classfer: A Generatve model odel the posteror dstrbuton P(Y X) Estmate class-condtonal dstrbuton P(X Y) for each Y Estmate pror dstrbuton
Logstc Regresson CAP 561: achne Learnng Instructor: Guo-Jun QI Bayes Classfer: A Generatve model odel the posteror dstrbuton P(Y X) Estmate class-condtonal dstrbuton P(X Y) for each Y Estmate pror dstrbuton
Curve Fitting with the Least Square Method
 WIKI Document Number 5 Interpolaton wth Least Squares Curve Fttng wth the Least Square Method Mattheu Bultelle Department of Bo-Engneerng Imperal College, London Context We wsh to model the postve feedback
WIKI Document Number 5 Interpolaton wth Least Squares Curve Fttng wth the Least Square Method Mattheu Bultelle Department of Bo-Engneerng Imperal College, London Context We wsh to model the postve feedback
T E C O L O T E R E S E A R C H, I N C.
 T E C O L O T E R E S E A R C H, I N C. B rdg n g En g neern g a nd Econo mcs S nce 1973 THE MINIMUM-UNBIASED-PERCENTAGE ERROR (MUPE) METHOD IN CER DEVELOPMENT Thrd Jont Annual ISPA/SCEA Internatonal Conference
T E C O L O T E R E S E A R C H, I N C. B rdg n g En g neern g a nd Econo mcs S nce 1973 THE MINIMUM-UNBIASED-PERCENTAGE ERROR (MUPE) METHOD IN CER DEVELOPMENT Thrd Jont Annual ISPA/SCEA Internatonal Conference
Reliability Sensitivity Algorithm Based on Stratified Importance Sampling Method for Multiple Failure Modes Systems
 Chnese Journa o Aeronautcs 3(010) 660-669 Chnese Journa o Aeronautcs www.esever.com/ocate/ca Reabty Senstvty Agorthm Based on Strated Importance Sampng Method or Mutpe aure Modes Systems Zhang eng a, u
Chnese Journa o Aeronautcs 3(010) 660-669 Chnese Journa o Aeronautcs www.esever.com/ocate/ca Reabty Senstvty Agorthm Based on Strated Importance Sampng Method or Mutpe aure Modes Systems Zhang eng a, u
Body Models I-2. Gerard Pons-Moll and Bernt Schiele Max Planck Institute for Informatics
 Body Models I-2 Gerard Pons-Moll and Bernt Schele Max Planck Insttute for Informatcs December 18, 2017 What s mssng Gven correspondences, we can fnd the optmal rgd algnment wth Procrustes. PROBLEMS: How
Body Models I-2 Gerard Pons-Moll and Bernt Schele Max Planck Insttute for Informatcs December 18, 2017 What s mssng Gven correspondences, we can fnd the optmal rgd algnment wth Procrustes. PROBLEMS: How
MOMENTS OF NONIDENTICAL ORDER STATISTICS FROM BURR XII DISTRIBUTION WITH GAMMA AND NORMAL OUTLIERS
 Journa of Matheat and Statt, 9 (): 5-6, 3 ISSN 549-3644 3 Sene Puaton do:.3844/p.3.5.6 Puhed Onne 9 () 3 (http://www.thepu.o/.to) MOMENTS OF NONIDENTIAL ORDER STATISTIS FROM BURR XII DISTRIBUTION WITH
Journa of Matheat and Statt, 9 (): 5-6, 3 ISSN 549-3644 3 Sene Puaton do:.3844/p.3.5.6 Puhed Onne 9 () 3 (http://www.thepu.o/.to) MOMENTS OF NONIDENTIAL ORDER STATISTIS FROM BURR XII DISTRIBUTION WITH
Neural network-based athletics performance prediction optimization model applied research
 Avaabe onne www.jocpr.com Journa of Chemca and Pharmaceutca Research, 04, 6(6):8-5 Research Artce ISSN : 0975-784 CODEN(USA) : JCPRC5 Neura networ-based athetcs performance predcton optmzaton mode apped
Avaabe onne www.jocpr.com Journa of Chemca and Pharmaceutca Research, 04, 6(6):8-5 Research Artce ISSN : 0975-784 CODEN(USA) : JCPRC5 Neura networ-based athetcs performance predcton optmzaton mode apped
Chapter 5. Solution of System of Linear Equations. Module No. 6. Solution of Inconsistent and Ill Conditioned Systems
 Numercal Analyss by Dr. Anta Pal Assstant Professor Department of Mathematcs Natonal Insttute of Technology Durgapur Durgapur-713209 emal: anta.bue@gmal.com 1 . Chapter 5 Soluton of System of Lnear Equatons
Numercal Analyss by Dr. Anta Pal Assstant Professor Department of Mathematcs Natonal Insttute of Technology Durgapur Durgapur-713209 emal: anta.bue@gmal.com 1 . Chapter 5 Soluton of System of Lnear Equatons
Implicit Integration Henyey Method
 Implct Integraton Henyey Method In realstc stellar evoluton codes nstead of a drect ntegraton usng for example the Runge-Kutta method one employs an teratve mplct technque. Ths s because the structure
Implct Integraton Henyey Method In realstc stellar evoluton codes nstead of a drect ntegraton usng for example the Runge-Kutta method one employs an teratve mplct technque. Ths s because the structure
Feature Selection: Part 1
 CSE 546: Machne Learnng Lecture 5 Feature Selecton: Part 1 Instructor: Sham Kakade 1 Regresson n the hgh dmensonal settng How do we learn when the number of features d s greater than the sample sze n?
CSE 546: Machne Learnng Lecture 5 Feature Selecton: Part 1 Instructor: Sham Kakade 1 Regresson n the hgh dmensonal settng How do we learn when the number of features d s greater than the sample sze n?
Stat 543 Exam 2 Spring 2016
 Stat 543 Exam 2 Sprng 206 I have nether gven nor receved unauthorzed assstance on ths exam. Name Sgned Date Name Prnted Ths Exam conssts of questons. Do at least 0 of the parts of the man exam. I wll score
Stat 543 Exam 2 Sprng 206 I have nether gven nor receved unauthorzed assstance on ths exam. Name Sgned Date Name Prnted Ths Exam conssts of questons. Do at least 0 of the parts of the man exam. I wll score
Lectures - Week 4 Matrix norms, Conditioning, Vector Spaces, Linear Independence, Spanning sets and Basis, Null space and Range of a Matrix
 Lectures - Week 4 Matrx norms, Condtonng, Vector Spaces, Lnear Independence, Spannng sets and Bass, Null space and Range of a Matrx Matrx Norms Now we turn to assocatng a number to each matrx. We could
Lectures - Week 4 Matrx norms, Condtonng, Vector Spaces, Lnear Independence, Spannng sets and Bass, Null space and Range of a Matrx Matrx Norms Now we turn to assocatng a number to each matrx. We could
Chapter 11. Supplemental Text Material. The method of steepest ascent can be derived as follows. Suppose that we have fit a firstorder
 S-. The Method of Steepet cent Chapter. Supplemental Text Materal The method of teepet acent can be derved a follow. Suppoe that we have ft a frtorder model y = β + β x and we wh to ue th model to determne
S-. The Method of Steepet cent Chapter. Supplemental Text Materal The method of teepet acent can be derved a follow. Suppoe that we have ft a frtorder model y = β + β x and we wh to ue th model to determne
Lecture 21: Numerical methods for pricing American type derivatives
 Lecture 21: Numercal methods for prcng Amercan type dervatves Xaoguang Wang STAT 598W Aprl 10th, 2014 (STAT 598W) Lecture 21 1 / 26 Outlne 1 Fnte Dfference Method Explct Method Penalty Method (STAT 598W)
Lecture 21: Numercal methods for prcng Amercan type dervatves Xaoguang Wang STAT 598W Aprl 10th, 2014 (STAT 598W) Lecture 21 1 / 26 Outlne 1 Fnte Dfference Method Explct Method Penalty Method (STAT 598W)
A A Non-Constructible Equilibrium 1
 A A Non-Contructbe Equbrum 1 The eampe depct a eparabe contet wth three payer and one prze of common vaue 1 (o v ( ) =1 c ( )). I contruct an equbrum (C, G, G) of the contet, n whch payer 1 bet-repone
A A Non-Contructbe Equbrum 1 The eampe depct a eparabe contet wth three payer and one prze of common vaue 1 (o v ( ) =1 c ( )). I contruct an equbrum (C, G, G) of the contet, n whch payer 1 bet-repone
APPENDIX A Some Linear Algebra
 APPENDIX A Some Lnear Algebra The collecton of m, n matrces A.1 Matrces a 1,1,..., a 1,n A = a m,1,..., a m,n wth real elements a,j s denoted by R m,n. If n = 1 then A s called a column vector. Smlarly,
APPENDIX A Some Lnear Algebra The collecton of m, n matrces A.1 Matrces a 1,1,..., a 1,n A = a m,1,..., a m,n wth real elements a,j s denoted by R m,n. If n = 1 then A s called a column vector. Smlarly,
Chapter 6 The Effect of the GPS Systematic Errors on Deformation Parameters
 Chapter 6 The Effect of the GPS Sytematc Error on Deformaton Parameter 6.. General Beutler et al., (988) dd the frt comprehenve tudy on the GPS ytematc error. Baed on a geometrc approach and aumng a unform
Chapter 6 The Effect of the GPS Sytematc Error on Deformaton Parameter 6.. General Beutler et al., (988) dd the frt comprehenve tudy on the GPS ytematc error. Baed on a geometrc approach and aumng a unform
σ τ τ τ σ τ τ τ σ Review Chapter Four States of Stress Part Three Review Review
 Chapter Four States of Stress Part Three When makng your choce n lfe, do not neglect to lve. Samuel Johnson Revew When we use matrx notaton to show the stresses on an element The rows represent the axs
Chapter Four States of Stress Part Three When makng your choce n lfe, do not neglect to lve. Samuel Johnson Revew When we use matrx notaton to show the stresses on an element The rows represent the axs
Lecture 10 Support Vector Machines II
 Lecture 10 Support Vector Machnes II 22 February 2016 Taylor B. Arnold Yale Statstcs STAT 365/665 1/28 Notes: Problem 3 s posted and due ths upcomng Frday There was an early bug n the fake-test data; fxed
Lecture 10 Support Vector Machnes II 22 February 2016 Taylor B. Arnold Yale Statstcs STAT 365/665 1/28 Notes: Problem 3 s posted and due ths upcomng Frday There was an early bug n the fake-test data; fxed
Mathematics TASKS. GCSE to ASIA-level BRIDGING. tangent lines at a drffarent paint on the surface
 Mathematcs GCSE to ASA-eve BRDGNG TASKS tangent nes at a drffarent pant on the surface Pease compete one ne from the task st eow. A students must compete the mdde task: worked examp :!car task *Topc st
Mathematcs GCSE to ASA-eve BRDGNG TASKS tangent nes at a drffarent pant on the surface Pease compete one ne from the task st eow. A students must compete the mdde task: worked examp :!car task *Topc st
Topic 5: Non-Linear Regression
 Topc 5: Non-Lnear Regresson The models we ve worked wth so far have been lnear n the parameters. They ve been of the form: y = Xβ + ε Many models based on economc theory are actually non-lnear n the parameters.
Topc 5: Non-Lnear Regresson The models we ve worked wth so far have been lnear n the parameters. They ve been of the form: y = Xβ + ε Many models based on economc theory are actually non-lnear n the parameters.
Some Comments on Accelerating Convergence of Iterative Sequences Using Direct Inversion of the Iterative Subspace (DIIS)
") Some Comments on Acceleratng Convergence of Iteratve Sequences Usng Drect Inverson of the Iteratve Subspace (DIIS) C. Davd Sherrll School of Chemstry and Bochemstry Georga Insttute of Technology May 1998
Some Comments on Acceleratng Convergence of Iteratve Sequences Usng Drect Inverson of the Iteratve Subspace (DIIS) C. Davd Sherrll School of Chemstry and Bochemstry Georga Insttute of Technology May 1998
The Fundamental Theorem of Algebra. Objective To use the Fundamental Theorem of Algebra to solve polynomial equations with complex solutions
 5-6 The Fundamental Theorem of Algebra Content Standards N.CN.7 Solve quadratc equatons wth real coeffcents that have comple solutons. N.CN.8 Etend polnomal denttes to the comple numbers. Also N.CN.9,
5-6 The Fundamental Theorem of Algebra Content Standards N.CN.7 Solve quadratc equatons wth real coeffcents that have comple solutons. N.CN.8 Etend polnomal denttes to the comple numbers. Also N.CN.9,
Review: Fit a line to N data points
 Revew: Ft a lne to data ponts Correlated parameters: L y = a x + b Orthogonal parameters: J y = a (x ˆ x + b For ntercept b, set a=0 and fnd b by optmal average: ˆ b = y, Var[ b ˆ ] = For slope a, set
Revew: Ft a lne to data ponts Correlated parameters: L y = a x + b Orthogonal parameters: J y = a (x ˆ x + b For ntercept b, set a=0 and fnd b by optmal average: ˆ b = y, Var[ b ˆ ] = For slope a, set
1.050 Engineering Mechanics I. Summary of variables/concepts. Lecture 27-37
 .5 Engneeng Mechancs I Summa of vaabes/concepts Lectue 7-37 Vaabe Defnton Notes & ments f secant f tangent f a b a f b f a Convet of a functon a b W v W F v R Etena wok N N δ δ N Fee eneg an pementa fee
.5 Engneeng Mechancs I Summa of vaabes/concepts Lectue 7-37 Vaabe Defnton Notes & ments f secant f tangent f a b a f b f a Convet of a functon a b W v W F v R Etena wok N N δ δ N Fee eneg an pementa fee
Lower Bounding Procedures for the Single Allocation Hub Location Problem
 Lower Boundng Procedures for the Snge Aocaton Hub Locaton Probem Borzou Rostam 1,2 Chrstoph Buchhem 1,4 Fautät für Mathemat, TU Dortmund, Germany J. Faban Meer 1,3 Uwe Causen 1 Insttute of Transport Logstcs,
Lower Boundng Procedures for the Snge Aocaton Hub Locaton Probem Borzou Rostam 1,2 Chrstoph Buchhem 1,4 Fautät für Mathemat, TU Dortmund, Germany J. Faban Meer 1,3 Uwe Causen 1 Insttute of Transport Logstcs,
Multilayer Perceptrons and Backpropagation. Perceptrons. Recap: Perceptrons. Informatics 1 CG: Lecture 6. Mirella Lapata
 Multlayer Perceptrons and Informatcs CG: Lecture 6 Mrella Lapata School of Informatcs Unversty of Ednburgh mlap@nf.ed.ac.uk Readng: Kevn Gurney s Introducton to Neural Networks, Chapters 5 6.5 January,
Multlayer Perceptrons and Informatcs CG: Lecture 6 Mrella Lapata School of Informatcs Unversty of Ednburgh mlap@nf.ed.ac.uk Readng: Kevn Gurney s Introducton to Neural Networks, Chapters 5 6.5 January,
ON THE BEHAVIOR OF THE CONJUGATE-GRADIENT METHOD ON ILL-CONDITIONED PROBLEMS
 ON THE BEHAVIOR OF THE CONJUGATE-GRADIENT METHOD ON I-CONDITIONED PROBEM Anders FORGREN Technca Report TRITA-MAT-006-O Department of Mathematcs Roya Insttute of Technoogy January 006 Abstract We study
ON THE BEHAVIOR OF THE CONJUGATE-GRADIENT METHOD ON I-CONDITIONED PROBEM Anders FORGREN Technca Report TRITA-MAT-006-O Department of Mathematcs Roya Insttute of Technoogy January 006 Abstract We study
Team. Outline. Statistics and Art: Sampling, Response Error, Mixed Models, Missing Data, and Inference
 Team Stattc and Art: Samplng, Repone Error, Mxed Model, Mng Data, and nference Ed Stanek Unverty of Maachuett- Amhert, USA 9/5/8 9/5/8 Outlne. Example: Doe-repone Model n Toxcology. ow to Predct Realzed
Team Stattc and Art: Samplng, Repone Error, Mxed Model, Mng Data, and nference Ed Stanek Unverty of Maachuett- Amhert, USA 9/5/8 9/5/8 Outlne. Example: Doe-repone Model n Toxcology. ow to Predct Realzed
CSCI B609: Foundations of Data Science
 CSCI B609: Foundatons of Data Scence Lecture 13/14: Gradent Descent, Boostng and Learnng from Experts Sldes at http://grgory.us/data-scence-class.html Grgory Yaroslavtsev http://grgory.us Constraned Convex
CSCI B609: Foundatons of Data Scence Lecture 13/14: Gradent Descent, Boostng and Learnng from Experts Sldes at http://grgory.us/data-scence-class.html Grgory Yaroslavtsev http://grgory.us Constraned Convex
Basic Dynamic Model. Basic Dynamic Model. Unified Motion/Force Control. Unified Motion/Force Control ( ) Operational Space Dynamics.
 Operational Space Dynamics.") Moble Robot Manpulaton Oussaa Khatb Robotcs Laboratory Departent of Coputer Scence Stanford Unversty Wth the Stanford-Schenan Ar Wth the PUMA 6 Stanford Free-Flyng Robot Stanford Robotc Platfors (993)
Moble Robot Manpulaton Oussaa Khatb Robotcs Laboratory Departent of Coputer Scence Stanford Unversty Wth the Stanford-Schenan Ar Wth the PUMA 6 Stanford Free-Flyng Robot Stanford Robotc Platfors (993)
Lecture 10: Multi-body simulation 1 (MBS 1) Steinbachstraße 53 B Tel.: (80)
 Steinbachstraße 53 B Tel.: (80)") Leture : Mut-bod uaton (MBS ) eron-n-harge: Dp.-Ing. Mare Fe Stenbahtraße 5 B e.: (8) 744 E-a: M.Fe@wz.rwth-aahen.de Vrtua ahne too Modeng and Suaton Leture: Mut-bod uaton V- Vrtua ahne too Modeng and
Leture : Mut-bod uaton (MBS ) eron-n-harge: Dp.-Ing. Mare Fe Stenbahtraße 5 B e.: (8) 744 E-a: M.Fe@wz.rwth-aahen.de Vrtua ahne too Modeng and Suaton Leture: Mut-bod uaton V- Vrtua ahne too Modeng and
Statistical Analysis of Environmental Data - Academic Year Prof. Fernando Sansò CLUSTER ANALYSIS
 Statstal Analyss o Envronmental Data - Aadem Year 008-009 Pro. Fernando Sansò EXERCISES - PAR CLUSER ANALYSIS Supervsed Unsupervsed Determnst Stohast Determnst Stohast Dsrmnant Analyss Bayesan Herarhal
Statstal Analyss o Envronmental Data - Aadem Year 008-009 Pro. Fernando Sansò EXERCISES - PAR CLUSER ANALYSIS Supervsed Unsupervsed Determnst Stohast Determnst Stohast Dsrmnant Analyss Bayesan Herarhal
Expectation Maximization Mixture Models HMMs
 -755 Machne Learnng for Sgnal Processng Mture Models HMMs Class 9. 2 Sep 200 Learnng Dstrbutons for Data Problem: Gven a collecton of eamples from some data, estmate ts dstrbuton Basc deas of Mamum Lelhood
-755 Machne Learnng for Sgnal Processng Mture Models HMMs Class 9. 2 Sep 200 Learnng Dstrbutons for Data Problem: Gven a collecton of eamples from some data, estmate ts dstrbuton Basc deas of Mamum Lelhood
Optimization Models for Heterogeneous Protocols
 Optmzaton Modes for Heterogeneous Protocos Steven Low CS, EE netab.caltech.edu wth J. Doye, S. Hegde, L. L, A. Tang, J. Wang, Catech M. Chang, Prnceton Outne Internet protocos Horzonta decomposton TCP-AQM
Optmzaton Modes for Heterogeneous Protocos Steven Low CS, EE netab.caltech.edu wth J. Doye, S. Hegde, L. L, A. Tang, J. Wang, Catech M. Chang, Prnceton Outne Internet protocos Horzonta decomposton TCP-AQM
Presenters. Muscle Modeling. John Rasmussen (Presenter) Arne Kiis (Host) The web cast will begin in a few minutes.
 Arne Kiis (Host) The web cast will begin in a few minutes.") Muscle Modelng If a part of my screen n mssng from your Vew, please press Sharng -> Vew -> Autoft The web cast wll begn n a few mnutes. Introducton (~5 mn) Overvew (~5 mn) Muscle knematcs (~10 mn) Muscle
Muscle Modelng If a part of my screen n mssng from your Vew, please press Sharng -> Vew -> Autoft The web cast wll begn n a few mnutes. Introducton (~5 mn) Overvew (~5 mn) Muscle knematcs (~10 mn) Muscle
Estimation of a proportion under a certain two-stage sampling design
 Etmaton of a roorton under a certan two-tage amng degn Danutė Kraavcatė nttute of athematc and nformatc Lthuana Stattc Lthuana Lthuana e-ma: raav@tmt Abtract The am of th aer to demontrate wth exame that
Etmaton of a roorton under a certan two-tage amng degn Danutė Kraavcatė nttute of athematc and nformatc Lthuana Stattc Lthuana Lthuana e-ma: raav@tmt Abtract The am of th aer to demontrate wth exame that
Chapter Eight. Review and Summary. Two methods in solid mechanics ---- vectorial methods and energy methods or variational methods
 Chapter Eght Energy Method 8. Introducton 8. Stran energy expressons 8.3 Prncpal of statonary potental energy; several degrees of freedom ------ Castglano s frst theorem ---- Examples 8.4 Prncpal of statonary
Chapter Eght Energy Method 8. Introducton 8. Stran energy expressons 8.3 Prncpal of statonary potental energy; several degrees of freedom ------ Castglano s frst theorem ---- Examples 8.4 Prncpal of statonary
Machine Learning: and 15781, 2003 Assignment 4
 ahne Learnng: 070 and 578, 003 Assgnment 4. VC Dmenson 30 onts Consder the spae of nstane X orrespondng to all ponts n the D x, plane. Gve the VC dmenson of the followng hpothess spaes. No explanaton requred.
ahne Learnng: 070 and 578, 003 Assgnment 4. VC Dmenson 30 onts Consder the spae of nstane X orrespondng to all ponts n the D x, plane. Gve the VC dmenson of the followng hpothess spaes. No explanaton requred.
1 Matrix representations of canonical matrices
 1 Matrx representatons of canoncal matrces 2-d rotaton around the orgn: ( ) cos θ sn θ R 0 = sn θ cos θ 3-d rotaton around the x-axs: R x = 1 0 0 0 cos θ sn θ 0 sn θ cos θ 3-d rotaton around the y-axs:
1 Matrx representatons of canoncal matrces 2-d rotaton around the orgn: ( ) cos θ sn θ R 0 = sn θ cos θ 3-d rotaton around the x-axs: R x = 1 0 0 0 cos θ sn θ 0 sn θ cos θ 3-d rotaton around the y-axs:
EN40: Dynamics and Vibrations. Homework 7: Rigid Body Kinematics
 N40: ynamcs and Vbratons Homewor 7: Rgd Body Knematcs School of ngneerng Brown Unversty 1. In the fgure below, bar AB rotates counterclocwse at 4 rad/s. What are the angular veloctes of bars BC and C?.
N40: ynamcs and Vbratons Homewor 7: Rgd Body Knematcs School of ngneerng Brown Unversty 1. In the fgure below, bar AB rotates counterclocwse at 4 rad/s. What are the angular veloctes of bars BC and C?.
Inthem-machine flow shop problem, a set of jobs, each
 THE ASYMPTOTIC OPTIMALITY OF THE SPT RULE FOR THE FLOW SHOP MEAN COMPLETION TIME PROBLEM PHILIP KAMINSKY Industra Engneerng and Operatons Research, Unversty of Caforna, Bereey, Caforna 9470, amnsy@eor.bereey.edu
THE ASYMPTOTIC OPTIMALITY OF THE SPT RULE FOR THE FLOW SHOP MEAN COMPLETION TIME PROBLEM PHILIP KAMINSKY Industra Engneerng and Operatons Research, Unversty of Caforna, Bereey, Caforna 9470, amnsy@eor.bereey.edu
Kinematics and geometry review. Based on figures from J Xiao
 Knematcs and geometr ree Based on fgres from J Xao Otlne ee obot Manlators obot onfgraton obot ecfcaton Nmber of Aes DOF recson eeatablt Knematcs relmnar World frame ont frame end-effector frame otaton
Knematcs and geometr ree Based on fgres from J Xao Otlne ee obot Manlators obot onfgraton obot ecfcaton Nmber of Aes DOF recson eeatablt Knematcs relmnar World frame ont frame end-effector frame otaton
Newton s Method for One - Dimensional Optimization - Theory
 Numercal Methods Newton s Method for One - Dmensonal Optmzaton - Theory For more detals on ths topc Go to Clck on Keyword Clck on Newton s Method for One- Dmensonal Optmzaton You are free to Share to copy,
Numercal Methods Newton s Method for One - Dmensonal Optmzaton - Theory For more detals on ths topc Go to Clck on Keyword Clck on Newton s Method for One- Dmensonal Optmzaton You are free to Share to copy,
Classification as a Regression Problem
 Target varable y C C, C,, ; Classfcaton as a Regresson Problem { }, 3 L C K To treat classfcaton as a regresson problem we should transform the target y nto numercal values; The choce of numercal class
Target varable y C C, C,, ; Classfcaton as a Regresson Problem { }, 3 L C K To treat classfcaton as a regresson problem we should transform the target y nto numercal values; The choce of numercal class
Root Locus Techniques
 Root Locu Technque ELEC 32 Cloed-Loop Control The control nput u t ynthezed baed on the a pror knowledge of the ytem plant, the reference nput r t, and the error gnal, e t The control ytem meaure the output,
Root Locu Technque ELEC 32 Cloed-Loop Control The control nput u t ynthezed baed on the a pror knowledge of the ytem plant, the reference nput r t, and the error gnal, e t The control ytem meaure the output,
Note 2. Ling fong Li. 1 Klein Gordon Equation Probablity interpretation Solutions to Klein-Gordon Equation... 2
 Note 2 Lng fong L Contents Ken Gordon Equaton. Probabty nterpretaton......................................2 Soutons to Ken-Gordon Equaton............................... 2 2 Drac Equaton 3 2. Probabty nterpretaton.....................................
Note 2 Lng fong L Contents Ken Gordon Equaton. Probabty nterpretaton......................................2 Soutons to Ken-Gordon Equaton............................... 2 2 Drac Equaton 3 2. Probabty nterpretaton.....................................
CS 331 DESIGN AND ANALYSIS OF ALGORITHMS DYNAMIC PROGRAMMING. Dr. Daisy Tang
 CS DESIGN ND NLYSIS OF LGORITHMS DYNMIC PROGRMMING Dr. Dasy Tang Dynamc Programmng Idea: Problems can be dvded nto stages Soluton s a sequence o decsons and the decson at the current stage s based on the
CS DESIGN ND NLYSIS OF LGORITHMS DYNMIC PROGRMMING Dr. Dasy Tang Dynamc Programmng Idea: Problems can be dvded nto stages Soluton s a sequence o decsons and the decson at the current stage s based on the
PHYS 705: Classical Mechanics. Calculus of Variations II
 1 PHYS 705: Classcal Mechancs Calculus of Varatons II 2 Calculus of Varatons: Generalzaton (no constrant yet) Suppose now that F depends on several dependent varables : We need to fnd such that has a statonary
1 PHYS 705: Classcal Mechancs Calculus of Varatons II 2 Calculus of Varatons: Generalzaton (no constrant yet) Suppose now that F depends on several dependent varables : We need to fnd such that has a statonary
12 th National Congress on Theoretical and Applied Mechanics September 2013, Saints Constantine and Helena, Varna, Bulgaria
 th Natonal Congress on Theoretal and Appled Mehans 3-6 September 03 Sants Constantne and Helena Varna Bulgara APPLICATION OF GEARING PRIMITIVES TO SKEW AXES GEAR SET SYNTHESIS PART : MATHEMATICAL MODEL
th Natonal Congress on Theoretal and Appled Mehans 3-6 September 03 Sants Constantne and Helena Varna Bulgara APPLICATION OF GEARING PRIMITIVES TO SKEW AXES GEAR SET SYNTHESIS PART : MATHEMATICAL MODEL