Computational Neuroscience. Session 4-2
|
|
|
- Myra Harrison
- 5 years ago
- Views:
Transcription
1 Computational Neuroscience. Session 4-2 Dr. Marco A Roque Sol 06/21/2018
2 Two-Dimensional Two-Dimensional System In this section we will introduce methods of phase plane analysis of two-dimensional systems. C V = I g L (V E L ) g Na m (V )(V E Na ) g K n(v E K ) ṅ = (n /τ(v ) Most concepts will be illustrated using the I Na,p + I K -model in the figure next page
3 Two-Dimensional
4 Two-Dimensional Two-Dimensional System having leak current I L, persistent Na + current I Na,p with instantaneous activation knetic and a relatively slower persistent K + current I K with either high figure above. This model is equivalent in many respects to the well-known and widely used I Ca + I K -model proposed by Morris and Lecar (1981), see picture above-bottom, to describe voltage oscillations in the barnacle giant muscle fiber.
5 Two-Dimensional Planar Vector Fields. Two-dimensional dynamical systems, also called planar systems, are often written in the form ẋ = f (x, y) ẏ = g(x, y) where functions fandg describe the evolution of the two-dimensional state variable (x(t), y(t)). For any point (x 0, y 0 ) on the phase plane the vector (f (x 0, y 0 ), g(x 0, y 0 )) indicates the direction of change of the state variable.
6 Two-Dimensional Planar Vector Fields. For example, negative f (x 0, y 0 ) and positive g(x 0, y 0 ) imply that x(t) decreases and y(t) increases at this particular point. Since each point on the phase plane (x, y) has its own vector (f, g), the system above is said to define a vector field on the plane, also known as direction field or velocity field, Thus, the vector field defines the direction of motion; Depending on where you are, it tells you where you are going.
7 Two-Dimensional Planar Vector Fields. Let us consider a few examples. Two-dimensional system ẋ = 1 ẏ = 0
8 Two-Dimensional Planar Vector Fields. defines a constant horizontal vector field in the figure below since each point has a horizontal vector (1, 0) attached to it.
9 Two-Dimensional Planar Vector Fields. ẋ = 0 ẏ = 1 defines a constant vertical vector field since each point has a horizontal vector (0, 1) attached to it.
10 Two-Dimensional Planar Vector Fields.
11 Two-Dimensional Planar Vector Fields. ẋ = x ẏ = y defines a vector field that points to the origin (0, 0).

12 Two-Dimensional Planar Vector Fields.
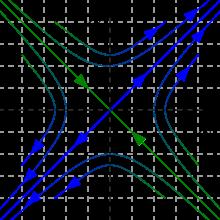
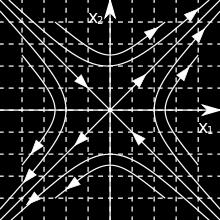
13 Two-Dimensional Planar Vector Fields. defines a saddle vector field. ẋ = y ẏ = x

14 Two-Dimensional Planar Vector Fields.
15 Two-Dimensional Nullclines. The set of points where the vector field changes its horizontal direction is called x-nullcline, and it is defined by the equation f (x, y) = 0. Indeed, at any such point x neither increases nor decreases because ẋ = 0. The x nullcline partitions the phase plane into two regions where x moves in opposite directions. Similarly, y-nullcline is defined by the equation g(x, y) = 0, and it denotes the set of points where the vector field changes its vertical direction. This nullcline partitions the phase plane into two regions where y either increases or decreases.
16 Two-Dimensional Nullclines. Both x and y nullclines partition the phase plane into 4 different regions: (a) x and y increase, (b) x decreases, y increases, (c) x and y decrease, and (d) x increases, y decreases, as we illustrate in the figure below
17 Two-Dimensional Nullclines.
18 Two-Dimensional Nullclines. Each point of intersection of nullclines is an equilibrium point, since f (x, y) = g(x, y) = 0 and hence ẋ = ẏ = 0. Conversely, every equilibrium of a two-dimensional system is the point of intersection of its nullclines.
19 Two-Dimensional Nullclines. Let us determine nullclines of the system ẋ = y ẏ = x it follows that x nullcline is the horizontal line y = 0, and it follows that y nullcline is the vertical line x = 0. These nullclines partition the phase plane into 4 quadrants having different directions of vector field. The intersection of the nullclines is the equilibrium (0, 0).
20 Two-Dimensional Nullclines. As another example, let us determine nullclines of the I Na,p + I K -model: C V = I g L (V E L ) g Na m (V )(V E Na ) g K n(v E K ) The V nullcline is given by the equation I g L (V E L ) g Na m (V )(V E Na ) g K n(v E K ) = 0 which has the solution n = I g L(V E L ) g Na m (V )(V E Na ) g K n(v E K ) (V nullcline)
21 Two-Dimensional Nullclines. It typically has the form of a cubic parabola
22 Two-Dimensional Nullclines. The equation n n = 0, defines the n nullcline n = n (n nullcline) which coincides with the K + steady-state activation function n (V ), though only an initial segment of this curve fits in the last figure.
23 Two-Dimensional Nullclines. It is easy to see how V - and n-nullclines partition the phase plane into four regions having different direction of the vector field: a) Both V and n increase: Both Na + and K + currents activate and lead to the upstroke of the action potential. b) V decreases but n still increases: Na + current deactivates but the slower K + current still activates and leads to the downstroke of the action potential.
24 Two-Dimensional Nullclines. c) Both V and n decrease: Both Na + and K + currents deactivate while V is small leading to a refractory period. d) V increases but n still decreases: Partial activation of Na + current combined with further deactivation of the residual K + current lead to relative refractory period, then to an excitable period, and possibly to another action potential.
25 Two-Dimensional Nullclines. The intersection of the V and n nullclines in the above figure is an equilibrium corresponding to the rest state. Because nullclines are so useful and important in geometrical analysis of dynamical systems, few scientists bother to plot vector fields.
26 Two-Dimensional Trajectories. A vector-function (x(t), y(t)) is a solution of the two-dimensional system ẋ = f (x, y) ẏ = g(x, y) starting with an initial condition (x(0), y(0)) = (x 0, y 0 ) when dx(t)/dt = f (x(t), y(t)) and dy(t)/dt = g(x(t), y(t)) at each t 0.
27 Two-Dimensional Trajectories. This requirement has a simple geometrical interpretation: A solution is a curve (x(t), y(t)) on the phase plane R 2 which is tangent to the vector field as we illustrate in the figure below. (Such a curve is often called a trajectory or an orbit ).
28 Two-Dimensional Trajectories.
29 Two-Dimensional Trajectories. Thus, to understand the geometry of a vector field, it is always useful to plot a few representative trajectories starting from various initial points. Due to the uniqueness of the solutions, the trajectories cannot cross, so they partition the phase space into various regions. This is an important step toward determining phase portrait of a two-dimensional system
30 Two-Dimensional Trajectories. Let us return to the I Na,p + I K -model C V = I g L (V E L ) g Na m (V )(V E Na ) g K n(v E K ) ṅ = (n /τ(v ) with low-threshold K + current and explain two odd phenomena: Failure to generate all-or-none action potentials and inability to have a fixed value of the threshold voltage.
31 Two-Dimensional Trajectories. Brief and strong current pulses in the figure below-top reset the value of the voltage variable V but do not change the value of the K + activation variable n. Thus, each voltage trace after the pulse corresponds to a trajectory starting with different values of V 0 but the same value n 0.
32 Two-Dimensional Trajectories.
33 Two-Dimensional Trajectories. We see that each trajectory makes a counter-clockwise excursion and returns to the rest state, however the size of the excursion depends on the initial value of the voltage variable and can be small (subthreshold response), intermediate, or large (action potential). This phenomenon was considered theoretically by FitzHugh in early sixties and demonstrated experimentally by Cole et al. (1970) using squid giant axon at higher than normal temperatures.
34 Two-Dimensional Trajectories. In the figure below-bottom we apply a long pre-pulse current of various amplitudes to reset the K + activation variable n to various values, and then a brief strong pulse to reset V to exactly 48mV.
35 Two-Dimensional Trajectories.
36 Two-Dimensional Trajectories. Each voltage trace after the pulse corresponds to a trajectory starting with the same V 0 = 48mV, but different values of n 0. We see that some trajectories return immediately to the rest state while others do so after generating an action potential.therefore, V = 48mV is a subthreshold value when n 0 is large, and superthreshold otherwise.
37 Two-Dimensional Limit cycles. A trajectory that forms a closed loop, as in the figure below is called a periodic trajectory, a limit cycle, or a periodic orbit (the latter is usually reserved for mappings, which we do not consider here).the existence of limit cycles is a major feature of two-dimensional systems that cannot exist in R
38 Two-Dimensional Limit cycles.
39 Two-Dimensional Limit cycles. If the initial point is on a limit cycle, then the solution (x(t), y(t)) stays on the cycle forever, and the system exhibits periodic behavior; i.e., x(t) = x(t + T ) and y(t) = y(t + T )(for all t) for some T > 0. The minimal T for which this equality holds is called the period of the limit cycle.
40 Two-Dimensional Limit cycles. A limit cycle is said to be asymptotically stable if any trajectory with the initial point sufficiently near the cycle approaches the cycle as t. Such asymptotically stable limit cycles are often called limit cycle attractors, since they attract all nearby trajectories. Otherwise are called asymptotically unstable
41 Two-Dimensional Limit cycles.
42 Two-Dimensional Limit cycles. The stable limit cycle in the figure below-b is an attractor. The unstable limit cycle in the below-a figure is often called a repeller, since it repels all nearby trajectories. Notice that there is always at least one equilibrium inside any limit cycle on a plane.
43 Two-Dimensional Limit cycles. The limit cycle in the figure below-top is also an attractor; It corresponds to the periodic (tonic) spiking of the the I Na,p + I K -model.
44 Two-Dimensional Limit cycles. In the below figure we depict limit cycles of three types of neurons recorded in vitro. Since we do not know the state of the internal variables, such as the magnitude of the activation and inactivation of Na + and K + currents, we plot the cycles on the (V, V 0 )-plane, where V 0 is the time derivative of V.
45 Two-Dimensional Limit cycles.
46 Two-Dimensional Relaxation Oscillators. Many models in science and engineering can be reduced to two-dimensional fast/slow systems of the form ẋ = f (x, y) (fast variable) ẏ = µg(x, y) (slow variable)
47 Two-Dimensional Relaxation Oscillators. where small parameter µ describes the ratio of time scales of variables x and y. Typically, fast variable x has a cubic-like nullcline that intersects the y nullcline somewhere in the middle branch, as in the figure below-a, resulting in relaxation oscillations.
48 Two-Dimensional Relaxation Oscillators.
49 Two-Dimensional Relaxation Oscillators. The periodic trajectory of the system slides down along the left (stable) branch of the cubic nullcline until it reaches the left knee A. At this moment, it quickly jumps to the point B and then slowly slides up along the right (also stable) branch of the cubic nullcline. Upon reaching the right knee C, the system jumps to the left branch and starts to slide down again, thereby completing one oscillation.
50 Two-Dimensional Relaxation Oscillators. Relaxation oscillations are easy to grasp conceptually, but some of their features are quite difficult to study mathematically. Notice that the jumps in the figure below-a, are nearly horizontal - a distinctive signature of relaxation oscillations that is due to the disparately different time scales in the system.
51 Two-Dimensional Relaxation Oscillators.
52 Two-Dimensional Relaxation Oscillators. Although many neuronal models have fast and slow time scales and could be reduced to the fast/slow form above, they do not exhibit relaxation oscillations because the parameter µ is not small enough.
53 Two-Dimensional Local linear analysis. Consider a two-dimensional dynamical system ẋ = f (x, y) ẏ = µg(x, y) having an equilibrium point (x 0, y 0 ). The nonlinear functions f and g can be linearized near the equilibrium; i.e., written in the form f (x, y) = a(x x 0 ) + b(y y 0 ) + higher terms g(x, y) = c(x x 0 ) + d(y y 0 ) + higher terms
54 Two-Dimensional Local linear analysis. here higher-order terms include (xx 0 )2, (xx0)(yy 0 ), (xx 0 ), etc., and a = f x (x 0, y 0 ); b = f y (x 0, y 0 ) c = g x (x 0, y 0 ); d = g y (x 0, y 0 )
55 Two-Dimensional Local linear analysis. are partial derivatives of f and g with respect of the state variables x and y evaluated at the equilibrium (x 0, y 0 ) (first, evaluate the derivatives, then substitute x = x 0 and y = y 0 ).Many questions regarding the stability of the equilibrium can be answered by considering the corresponding linear system u = au + bw ẇ = cu + dw where u = x x 0 and w = y y 0 are the deviations from the equilibrium, and the higher-order terms, u 2, uw, w 2, u 3, etc., are neglected. We can write this system in the matrix form
56 Two-Dimensional Local linear analysis. ( u ẇ ) ( a b = c d ) ( u w ) The linearization matrix is ( a b L = c d )
57 Two-Dimensional Local linear analysis. is called the Jacobian matrix of the system at the equilibrium (x 0, y 0 ). For example, the Jacobian matrix of the system at the origin is L 0 = ẋ = y ẏ = x ( It is important to remember that Jacobian matrices are defined for equilibria, and that a nonlinear system can have many equilibria and hence many different Jacobian matrices. )
58 Two-Dimensional Eigenvalues and eigenvectors. A non-zero vector v R 2 is said to be an eigenvector of the matrix L corresponding to the eigenvalue λ if Lv = λv; (matrix notation) For example, above the matrix L 0 has two eigenvectors v 1 = ( 1 1 ) ( ) 1 v 2 = 1
59 Two-Dimensional Eigenvalues and eigenvectors. corresponding to the eigenvalues λ 1 = 1 and λ 2 = 1, respectively. Any textbook on linear algebra explains how to find eigenvectors and eigenvalues of an arbitrary matrix. Eigenvalues play important role in analysis of stability of equilibria. To find the eigenvalues of a 2 2-matrix L, one solves the characteristic equation ( ) a b det(l) = det c d This equation can be written in the polynomial form (a λ)(d λ) bc = 0 or
60 Two-Dimensional Eigenvalues and eigenvectors. λ 2 τλ + = 0; τ = a + d = tr(l). = ad bc = det(l) and they are either real (when τ 2 4 0), complex-conjugate (when τ 2 4 < 0. or repeated (when τ 2 4 = 0) When a, 2 2-matrx, have two eigenvalues with distinct (independent) eigenvectors, the solution of the linear system has the form ( u(t) w(t) ) = c 1 e λ1t v 1 + c 2 e λ2t v 2
61 Two-Dimensional Eigenvalues and eigenvectors. where c 1 and c 2 are constants that depend on the initial condition. This formula is valid for real and complex-conjugate eigenvalues. When both eigenvalues are negative (or have negative real parts), u(t) 0 and w(t) 0, meaning x(t) x 0 and y(t) y 0, so that the equilibrium (x 0, y 0 ) is exponentially (and hence asymptotically) stable. It is unstable when at least one eigenvalue is positive or has a positive real part. We denote stable equilibria as filled circles and unstable equilibria as open circles throughout the notes.
62 Two-Dimensional Local equivalence. An equilibrium whose Jacobian matrix does not have zero eigenvalues or eigenvalues with zero real part, is called hyperbolic.such an equilibrium can be stable or unstable. The Hartman-Grobman theorem states that the vector-field and hence the dynamic of a nonlinear system, e.g., near such a hyperbolic equilibrium is topologically equivalent to its linearization.
63 Two-Dimensional Local equivalence. That is, the higher-order terms that are neglected when the original system is substituted by its linearization, do not play any qualitative role. Thus, understanding and classifying the geometry of vector-fields of linear systems provide an exhaustive description of all possible behaviors of nonlinear systems near hyperbolic equilibria.
64 Two-Dimensional Local equivalence. A zero eigenvalue (or eigenvalues with zero real parts) arise when the equilibrium undergoes a bifurcation and such equilibria are called non-hyperbolic. Linear analysis cannot answer the question of stability of a nonlinear system in this case, since small nonlinear (high-order) terms play a crucial role here. We denote equilibria undergoing a bifurcation as half-filled circles.

65 Two-Dimensional Classification of equilibria. Besides defining the stability of an equilibrium, the eigenvalues also define the geometry of the vector field near the equilibrium, as we illustrate in the figure below. There are three major types of equilibria:
66 Two-Dimensional Classification of equilibria. Node. The eigenvalues are real and of the same sign. The node is stable when the eigenvalues are negative, and unstable when they are positive. The trajectories tend to converge to or diverge from the node along the eigenvector corresponding to the eigenvalue having smallest absolute value.

67 Two-Dimensional Classification of equilibria. Stable Node Unstable Node
68 Two-Dimensional Classification of equilibria. Saddle. The eigenvalues are real and of the opposite signs. Saddles are always unstable, since one of the eigenvalues is always positive. Most trajectories approach saddle equilibrium along the eigenvector corresponding to negative (stable) eigenvalue and then diverge from the saddle along the eigenvector corresponding to positive (unstable) eigenvalue.
69 Two-Dimensional Classification of equilibria. Saddle Point
70 Two-Dimensional Classification of equilibria. Focus.The eigenvalues are complex-conjugate. Foci are stable when the eigenvalues have negative real parts, and unstable when the eigenvalues have positive real parts. The imaginary part of the eigenvalues determine the frequency of rotation of trajectories around the focus equilibrium. When the system undergoes a saddle-node bifurcation, one of the eigenvalues becomes zero and a mixed type of equilibrium occurs. There could be other types of mixed equilibria, such as saddle-focus, focus-node, etc., in dynamical systems having dimension three and up.
71 Two-Dimensional Classification of equilibria.
72 Two-Dimensional Classification of equilibria.
73 Two-Dimensional Classification of equilibria. Depending upon the value of the injected current I, the I Na,p + I K -model with a low-threshold K + current has a stable focus or an unstable focus surrounded by a stable limit cycle. In the figure below we depict the vector field and nullclines of the same model with a high-threshold K + current. As one expects from the shape of the steady-state I-V curve in the figure below, the model has three equilibria: a stable node, a saddle, and an unstable focus. Notice that the third equilibrium is unstable even though the I-V relation has a positive slope around it.
74 Two-Dimensional Classification of equilibria.
75 Two-Dimensional FitzHugh-Nagumo Model. The FitzHugh-Nagumo model (FitzHugh 1961, Nagumo et al. 1962) V = V (a V )(V 1) w + I ẇ = bv cw imitates generation of action potentials by Hodgkin-Huxley-type models having cubic (N-shaped) nullclines as in previous figures.
76 Two-Dimensional FitzHugh-Nagumo Model. Here V mimics the membrane voltage and the recovery variable w, mimics activation of an outward current. Parameter I mimics the injected current, and for the sake of simplicity we set I = 0 in this analysis. Parameter a describes the shape of the cubic parabola V (a V )(V 1), and parameters b > 0 and c 0 describe the kinetics of the recovery variable w. When b and c are small, the model may exhibit relaxation oscillations.
77 Two-Dimensional FitzHugh-Nagumo Model. Nullclines of the FitzHugh-Nagumo model have the cubic and linear form w = V (a V )(V 1) + I (V nullcline) w = bv /c (w nullcline) and they can intersect in one, two, or three points resulting in one, two, or three equilibria, all ofwhich may be unstable. Below we consider the simple case I = 0, so that the origin, (0, 0), is an equilibrium.indeed, the nullclines of the model, depicted in the figure below, always intersect at (0, 0) in this case.
78 Two-Dimensional FitzHugh-Nagumo Model.
79 Two-Dimensional FitzHugh-Nagumo Model. The intersection may occur on the left or middle branch of the cubic V nullcline depending on the sign of the parameter a. Let us determine how the stability of the equilibrium (0, 0) depends on the parameters a, b, and c. When c == 0. The Jacobian matrix of the FitzHugh-Nagumo modelat the equilibrium (0, 0) has the form ( ) a 1 L = b c
80 Two-Dimensional FitzHugh-Nagumo Model. It is easy to check that τ = tr(l) = a c; = det(l) = ac + b and Using the stability diagram, we conclude that the equilibrium is stable when τ < 0 and > 0.Both conditions are always satisfied when a > 0, hence the equilibrium is indeed stable. However,both conditions may also be satisfied for negative a, therefore, the equilibrium in this case, also be stable.
81 Two-Dimensional FitzHugh-Nagumo Model. Thus, the equilibrium loses stability not at the left knee, but slightly to the right of it, so that a part of the âăijunstable branchâăi of the cubic nullcline is actually stable. The part is small when b and c are small, i.e., when the system is in a relaxation regime. V = V (a V )(V 1) w + I ẇ = bv cw
82 Two-Dimensional FitzHugh-Nagumo Model. Phase Portraits An important step in geometrical analysis of dynamical systems is sketching of their phase portraits. The phase portrait of a two-dimensional system is a partitioning of the phase plane into orbits or trajectories. Instead of depicting all possible trajectories, it usually suffices to depict some representative trajectories. The phase portrait contains all important information about qualitative behavior of the dynamical system, such as relative location and stability of equilibria, their attraction domains, separatrices, limit cycles, and other special trajectories.
83 Two-Dimensional FitzHugh-Nagumo Model. Bistability and attraction domains Non-linear two-dimensional systems can have many co-existing attractors. For example, the FitzHugh-Nagumo model with nullclines depicted in the figure below has two stable equilibria separated by an unstable equilibrium. Such a system is called bistable (multi-stable when there are more than two attractors).
84 Two-Dimensional FitzHugh-Nagumo Model. Bistability and attraction domains
85 Two-Dimensional FitzHugh-Nagumo Model. Bistability and attraction domains Depending on the initial conditions, the trajectory may approach the left or right equilibrium. Shaded area denotes the attraction domain of the right equilibrium; that is, the set of all initial conditions that lead to this equilibrium. Since there are only two attractors, the complementary white area denotes the attraction domain of the other equilibrium. The domains are separated not by equilibria as in one-dimensional case, but by special trajectories called separatrices.
86 Two-Dimensional FitzHugh-Nagumo Model. Bistability and attraction domains Many neural models are bistable or can be made bistable when the parameters have appropriate values. Often bistability results from the co0existence of an equilibrium attractor corresponding to the rest state and a limit cycle attractor corresponding to the repetitive firing state. In the figure below-top depicts one of many possible cases. Here we use the I Na,p + I K -model with a high-threshold fast K + current. The rest state exists due to the balance of partially activated Na + and leak currents.
87 Two-Dimensional FitzHugh-Nagumo Model. Bistability and attraction domains
88 Two-Dimensional FitzHugh-Nagumo Model. Bistability and attraction domains The rest state exists due to the balance of partially activated Na + and leak currents. The repetitive spiking state persists because K + current deactivates too fast and cannot bring the membrane potential into the subthreshold voltage range.
89 Two-Dimensional FitzHugh-Nagumo Model. Bistability and attraction domains If the initial state is in the shaded area, which is the attraction domain of the limit cycle attractor, the trajectory approaches the limit cycle attractor and the neuron fires an infinite train of action potentials.
90 Two-Dimensional FitzHugh-Nagumo Model. Stable/unstable manifolds In contrast to one-dimensional systems, unstable equilibria in two-dimensional systems do not separate attraction domains. Nevertheless, they play an important role in defining the boundary of attraction domains, as in the previous figure. In both cases the attraction domains are separated by a pair of trajectories, called separatrices, that converge to the saddle equilibrium. Such trajectories form a stable manifold of a saddle point. Locally, the manifold is parallel to the eigenvector corresponding to the negative (stable) eigenvalue. See the figure below-bottom
91 Two-Dimensional FitzHugh-Nagumo Model. Stable/unstable manifolds
92 Two-Dimensional FitzHugh-Nagumo Model. Stable/unstable manifolds Similarly, the unstable manifold of a saddle is formed by the two trajectories that originate exactly from the saddle (or approach the saddle if the time is reversed). Locally, the unstable manifold is parallel to the eigenvector corresponding to the positive (unstable) eigenvalue. The stable manifold of the saddle plays the role of a threshold, since it separates rest and spiking states. We illustrate this concept in the below figure-bottom
93 Two-Dimensional FitzHugh-Nagumo Model. Stable/unstable manifolds
94 Two-Dimensional FitzHugh-Nagumo Model. Stable/unstable manifolds If the initial state of the system denoted as A is in the shaded area, the trajectory will converge to the spiking attractor (right) no matter how close the initial condition to the stable manifold is. In contrast, if the initial condition denoted as B is in the white area, the trajectory will converge to the rest attractor (left). If the initial condition is precisely on the stable manifold (point C), the trajectory converges neither to rest nor to spiking state, but to the saddle equilibrium.
95 Two-Dimensional FitzHugh-Nagumo Model. Homoclinic/heteroclinic trajectories Of course, this case is highly unstable and small perturbations will certainly push the trajectory to one or the other side. The important message here is that, a threshold is not a point, i.e., a single voltage value, but a trajectory on the phase plane. The figure below-bottom shows that trajectories forming the unstable manifold originate from the saddle. Where do they go? Similarly, the trajectories forming the stable manifold terminate at the saddle; Where do they come from?
96 Two-Dimensional FitzHugh-Nagumo Model. Homoclinic/heteroclinic trajectories
97 Two-Dimensional FitzHugh-Nagumo Model. Homoclinic/heteroclinic trajectories We say that a trajectory is heteroclinic if it originates at one equilibrium and terminates at another equilibrium.

98 Two-Dimensional FitzHugh-Nagumo Model. Homoclinic/heteroclinic trajectories A trajectory is homoclinic if it originates and terminates at the same equilibrium.
99 Two-Dimensional FitzHugh-Nagumo Model. Homoclinic/heteroclinic trajectories Both types of trajectories play an important role in geometrical analysis of dynamical systems. Heteroclinic trajectories connect unstable and stable equilibria, as in the figure below and they are ubiquitous in dynamical systems having two or more equilibrium points.
100 Two-Dimensional FitzHugh-Nagumo Model. Homoclinic/heteroclinic trajectories In fact, there are infinitely many heteroclinic trajectories in the above figure, since all trajectories inside the bold loop originate at the unstable focus and terminate at the stable node (Find the exceptional trajectory that ends elsewhere). In contrast, homoclinic trajectories are rare. First, a homoclinic trajectory diverges from an equilibrium, therefore the equilibrium must be unstable. Next, the trajectory makes a loop and returns to the same equilibrium, as in the figure below-top
101 Two-Dimensional FitzHugh-Nagumo Model. Homoclinic/heteroclinic trajectories
102 Two-Dimensional FitzHugh-Nagumo Model. Homoclinic/heteroclinic trajectories It needs to hit the unstable equilibrium precisely, since a small error would make it deviate from the unstable equilibrium. Though uncommon, homoclinic trajectories indicate that the system undergoes a bifurcation - appearance or disappearance of a limit cycle. The homoclinic trajectory in the figure below-top indicates that the limit cycle is about to (dis)appear via saddle homoclinic orbit. The homoclinic trajectory in in the figure below-bottom indicates that a limit cycle is about to (dis)appear via saddle-node on invariant circle bifurcation.
103 Two-Dimensional FitzHugh-Nagumo Model. Homoclinic/heteroclinic trajectories
104 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation In the figure below-top we simulate the injection of a ramp current I into the I Na,p + I K -model having high-threshold K + current.our goal is to understand the transition from the rest state to repetitive spiking.
105 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation
106 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation When I is small, the phase portrait of the model is similar to the one depicted in the figure below for I = 0.
107 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation There are two equilibria in the low-voltage range-stable node corresponding to the rest state and a saddle. The equilibria are the intersections of the cubic V nullcline and the n nullcline.increasing the parameter I changes the shape of the cubic nullcline and shifts it upward, but does not change the n nullcline.
108 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation This results in decreasing the distance between the equilibria, until they coalesce as in the figure below-bottom so that the nullclines only touch each other in the low-voltage range.
109 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation
110 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation Further increase of I results in the disappearance of the saddle and node equilibrium, and hence in the disappearance of the rest state. The new phase portrait is depicted in the figure below-bottom; it has only a limit cycle attractor corresponding to repetitive firing.
111 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation
112 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation We see that increasing I past the value I = 4.51 results in transition from rest to periodic spiking dynamics. What kind of a bifurcation occurs when I = 4.51? Using the previous material introduce about bifurcation, we can immediately recognize the saddle-node bifurcation, whose major steps are summarized in the figure below
113 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation
114 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation As a bifurcation parameter changes, the saddle and the node equilibrium approach each other, coalesce, and then annihilate each other so there are no equilibria left. When coalescent, the joint equilibrium is neither a saddle nor a node, but a saddle-node. Its major feature is that it has precisely one zero eigenvalue, and it is stable on the one side of the neighborhood and unstable on the other side. It is a relatively simple exercise to determine bifurcation diagrams for saddle-node bifurcations in neuronal models. For this, we just need to determine all equilibria of the model and how they depend on the injected current I.
115 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation Any equilibrium of the I Na,p + I K -model satisfies the one-dimensional equation 0 = I g L (V E L ) g Na m (V )(V E Na ) g k n (V )(V E k ) where n = n (V ). Instead of solving this equation for V, we use V as a free parameter and solve it for I, I = g L (V E L ) + g Na m (V )(V E Na ) + g k n (V )(V E k ) and then depict the solution as a curve in the (I, V ) plane in the figure below-top. In the magnification (Figure below-top-right)
116 Two-Dimensional FitzHugh-Nagumo Model. Saddle-node bifurcation
117 Two-Dimensional one can clearly see how two branches of equilibria approach and annihilate each other as I approaches the bifurcation value FitzHugh-Nagumo Model. Andronov-Hopf bifurcation In the figure below-bottom, we repeat the current ramp experiment using the I Na,p + I K -model with low-threshold K + current.
118 Two-Dimensional
119 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation Phase portrait of such a model is simple - it has a unique equilibrium, as we illustrate in the figure below. When I is small, the equilibrium is a stable focus corresponding to the rest state.
120 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation
121 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation When I increases past I = 12, the focus loses stability and gives birth to a small-amplitude limit cycle attractor. The amplitude of the limit cycle grows as I increases. We see that increasing I beyond I = 12 results in the transition from rest to spiking behavior. What kind of a bifurcation is there? Recall that stable foci have a pair of complex-conjugate eigenvalues with negative real part. When I increases, the real part of the eigenvalues also increases until it becomes zero (at I = 12) and then positive (when I > 12) meaning that the focus is no longer stable.
122 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation The transitional from stable to unstable focus described above is called Andronov-Hopf bifurcation. It occurs when the eigenvalues become purely imaginary, as it happens when I = 12. We will study Andronov-Hopf bifurcations, which has two subclasses, namely, supercritical or subcritical. The former corresponds to a birth of a small-amplitude limit cycle attractor, as in the figure below. The latter corresponds to a death of an unstable limit cycle.
123 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation
124 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation In the figure below-left we plot the solution of the equilibrium curve, as an attempt to determine the bifurcation diagram for the Andronov-Hopf bifurcation in the I Na,p + I K -model. However, all we can see is that the equilibrium persists as I increases, but there is no information on its stability or on the existence of a limit cycle attractor.
125 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation
126 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation To study the limit cycle attractor, we need to simulate the model with various values of parameter I. For each I, we disregard the transient period and plot min V (t) and maxv (t) on the (I, V )-plane, as in the figure below-right. When I is small, the solutions converge to the stable equilibrium, and both minv (t) and maxv (t) are equal to the resting voltage.
127 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation
128 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation When I increases past I = 12, the minv (t) and maxv (t) values start to diverge, meaning that there is a limit cycle attractor whose amplitude increases as I does. This method is appropriate for analysis of supercritical Andronov-Hopf bifurcations but it fails for subcritical Andronov-Hopf bifurcations. Why? In the figure below depicts an interesting phenomenon observed in many biological neurons - excitation block. Spiking activity of the layer 5 pyramidal neuron of ratâăźs visual cortex is blocked by strong excitation, i.e., injection of strong depolarizing current.
129 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation
130 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation The geometry of this phenomenon is illustrated in the figure below.
131 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation As the magnitude of the injected current increases, the unstable equilibrium, which is the intersection point of the nullclines, moves to right branch of the cubic V nullcline and becomes stable. The limit cycle shrinks and the spiking activity disappears, typically but not necessarily via supercritical Andronov-Hopf type. Thus, the I Na,p + I K -model with low-threshold K + current can exhibit two such bifurcations in response to ramping up of the injected current, one leading to the appearance of periodic spiking activity and then one leading to its disappearance as in the previous figure.
132 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation Supercritical and subcritical Andronov-Hopf bifurcations in neurons result in slightly different neuro-computational properties. In contrast, the saddle-node and Andronov-Hopf bifurcations result in dramatically different neuro-computational properties.
133 Two-Dimensional FitzHugh-Nagumo Model. Andronov-Hopf bifurcation In particular, neurons near saddle-node bifurcation act as integrators - they prefer high-frequency nput; The higher the frequency of the input, the sooner they fire. In contrast, neural systems near Andronov-Hopf bifurcation have damped oscillatory potentials and they act as resonators - they prefer oscillatory input with the same frequency as that of damped oscillations. Increasing the frequency may delay or even terminate their response.
Dynamical Systems in Neuroscience: Elementary Bifurcations
 Dynamical Systems in Neuroscience: Elementary Bifurcations Foris Kuang May 2017 1 Contents 1 Introduction 3 2 Definitions 3 3 Hodgkin-Huxley Model 3 4 Morris-Lecar Model 4 5 Stability 5 5.1 Linear ODE..............................................
Dynamical Systems in Neuroscience: Elementary Bifurcations Foris Kuang May 2017 1 Contents 1 Introduction 3 2 Definitions 3 3 Hodgkin-Huxley Model 3 4 Morris-Lecar Model 4 5 Stability 5 5.1 Linear ODE..............................................
Mathematical Modeling I
 Mathematical Modeling I Dr. Zachariah Sinkala Department of Mathematical Sciences Middle Tennessee State University Murfreesboro Tennessee 37132, USA November 5, 2011 1d systems To understand more complex
Mathematical Modeling I Dr. Zachariah Sinkala Department of Mathematical Sciences Middle Tennessee State University Murfreesboro Tennessee 37132, USA November 5, 2011 1d systems To understand more complex
Dynamical Systems in Neuroscience: The Geometry of Excitability and Bursting
 Dynamical Systems in Neuroscience: The Geometry of Excitability and Bursting Eugene M. Izhikevich The MIT Press Cambridge, Massachusetts London, England Contents Preface xv 1 Introduction 1 1.1 Neurons
Dynamical Systems in Neuroscience: The Geometry of Excitability and Bursting Eugene M. Izhikevich The MIT Press Cambridge, Massachusetts London, England Contents Preface xv 1 Introduction 1 1.1 Neurons
Nonlinear Dynamics of Neural Firing
 Nonlinear Dynamics of Neural Firing BENG/BGGN 260 Neurodynamics University of California, San Diego Week 3 BENG/BGGN 260 Neurodynamics (UCSD) Nonlinear Dynamics of Neural Firing Week 3 1 / 16 Reading Materials
Nonlinear Dynamics of Neural Firing BENG/BGGN 260 Neurodynamics University of California, San Diego Week 3 BENG/BGGN 260 Neurodynamics (UCSD) Nonlinear Dynamics of Neural Firing Week 3 1 / 16 Reading Materials
Chapter 24 BIFURCATIONS
 Chapter 24 BIFURCATIONS Abstract Keywords: Phase Portrait Fixed Point Saddle-Node Bifurcation Diagram Codimension-1 Hysteresis Hopf Bifurcation SNIC Page 1 24.1 Introduction In linear systems, responses
Chapter 24 BIFURCATIONS Abstract Keywords: Phase Portrait Fixed Point Saddle-Node Bifurcation Diagram Codimension-1 Hysteresis Hopf Bifurcation SNIC Page 1 24.1 Introduction In linear systems, responses
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
= F ( x; µ) (1) where x is a 2-dimensional vector, µ is a parameter, and F :
 (1) where x is a 2-dimensional vector, µ is a parameter, and F :") 1 Bifurcations Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 A bifurcation is a qualitative change
1 Bifurcations Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 A bifurcation is a qualitative change
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II.
 Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
3 Action Potentials - Brutal Approximations
 Physics 172/278 - David Kleinfeld - Fall 2004; Revised Winter 2015 3 Action Potentials - Brutal Approximations The Hodgkin-Huxley equations for the behavior of the action potential in squid, and similar
Physics 172/278 - David Kleinfeld - Fall 2004; Revised Winter 2015 3 Action Potentials - Brutal Approximations The Hodgkin-Huxley equations for the behavior of the action potential in squid, and similar
Models Involving Interactions between Predator and Prey Populations
 Models Involving Interactions between Predator and Prey Populations Matthew Mitchell Georgia College and State University December 30, 2015 Abstract Predator-prey models are used to show the intricate
Models Involving Interactions between Predator and Prey Populations Matthew Mitchell Georgia College and State University December 30, 2015 Abstract Predator-prey models are used to show the intricate
7 Planar systems of linear ODE
 7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
CHAPTER 1. Bifurcations in the Fast Dynamics of Neurons: Implications for Bursting
 CHAPTER 1 Bifurcations in the Fast Dynamics of Neurons: Implications for Bursting John Guckenheimer Mathematics Department, Cornell University Ithaca, NY 14853 Joseph H. Tien Center for Applied Mathematics,
CHAPTER 1 Bifurcations in the Fast Dynamics of Neurons: Implications for Bursting John Guckenheimer Mathematics Department, Cornell University Ithaca, NY 14853 Joseph H. Tien Center for Applied Mathematics,
Bifurcation examples in neuronal models
 Bifurcation examples in neuronal models Romain Veltz / Olivier Faugeras October 15th 214 Outline Most figures from textbook of Izhikevich 1 Codim 1 bifurcations of equilibria 2 Codim 1 bifurcations of
Bifurcation examples in neuronal models Romain Veltz / Olivier Faugeras October 15th 214 Outline Most figures from textbook of Izhikevich 1 Codim 1 bifurcations of equilibria 2 Codim 1 bifurcations of
Copyright (c) 2006 Warren Weckesser
 2006 Warren Weckesser") 2.2. PLANAR LINEAR SYSTEMS 3 2.2. Planar Linear Systems We consider the linear system of two first order differential equations or equivalently, = ax + by (2.7) dy = cx + dy [ d x x = A x, where x =, and
2.2. PLANAR LINEAR SYSTEMS 3 2.2. Planar Linear Systems We consider the linear system of two first order differential equations or equivalently, = ax + by (2.7) dy = cx + dy [ d x x = A x, where x =, and
6.3.4 Action potential
 I ion C m C m dφ dt Figure 6.8: Electrical circuit model of the cell membrane. Normally, cells are net negative inside the cell which results in a non-zero resting membrane potential. The membrane potential
I ion C m C m dφ dt Figure 6.8: Electrical circuit model of the cell membrane. Normally, cells are net negative inside the cell which results in a non-zero resting membrane potential. The membrane potential
Math 312 Lecture Notes Linear Two-dimensional Systems of Differential Equations
 Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Example of a Blue Sky Catastrophe
 PUB:[SXG.TEMP]TRANS2913EL.PS 16-OCT-2001 11:08:53.21 SXG Page: 99 (1) Amer. Math. Soc. Transl. (2) Vol. 200, 2000 Example of a Blue Sky Catastrophe Nikolaĭ Gavrilov and Andrey Shilnikov To the memory of
PUB:[SXG.TEMP]TRANS2913EL.PS 16-OCT-2001 11:08:53.21 SXG Page: 99 (1) Amer. Math. Soc. Transl. (2) Vol. 200, 2000 Example of a Blue Sky Catastrophe Nikolaĭ Gavrilov and Andrey Shilnikov To the memory of
7 Two-dimensional bifurcations
 7 Two-dimensional bifurcations As in one-dimensional systems: fixed points may be created, destroyed, or change stability as parameters are varied (change of topological equivalence ). In addition closed
7 Two-dimensional bifurcations As in one-dimensional systems: fixed points may be created, destroyed, or change stability as parameters are varied (change of topological equivalence ). In addition closed
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
One Dimensional Dynamical Systems
 16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
Stability of Dynamical systems
 Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
2.10 Saddles, Nodes, Foci and Centers
 2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
Towards a Global Theory of Singularly Perturbed Dynamical Systems John Guckenheimer Cornell University
 Towards a Global Theory of Singularly Perturbed Dynamical Systems John Guckenheimer Cornell University Dynamical systems with multiple time scales arise naturally in many domains. Models of neural systems
Towards a Global Theory of Singularly Perturbed Dynamical Systems John Guckenheimer Cornell University Dynamical systems with multiple time scales arise naturally in many domains. Models of neural systems
Complex Dynamic Systems: Qualitative vs Quantitative analysis
 Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
Complex Dynamic Systems: Qualitative vs Quantitative analysis Complex Dynamic Systems Chiara Mocenni Department of Information Engineering and Mathematics University of Siena (mocenni@diism.unisi.it) Dynamic
A showcase of torus canards in neuronal bursters
 Journal of Mathematical Neuroscience (2012) 2:3 DOI 10.1186/2190-8567-2-3 RESEARCH OpenAccess A showcase of torus canards in neuronal bursters John Burke Mathieu Desroches Anna M Barry Tasso J Kaper Mark
Journal of Mathematical Neuroscience (2012) 2:3 DOI 10.1186/2190-8567-2-3 RESEARCH OpenAccess A showcase of torus canards in neuronal bursters John Burke Mathieu Desroches Anna M Barry Tasso J Kaper Mark
Spike-adding canard explosion of bursting oscillations
 Spike-adding canard explosion of bursting oscillations Paul Carter Mathematical Institute Leiden University Abstract This paper examines a spike-adding bifurcation phenomenon whereby small amplitude canard
Spike-adding canard explosion of bursting oscillations Paul Carter Mathematical Institute Leiden University Abstract This paper examines a spike-adding bifurcation phenomenon whereby small amplitude canard
Problem Set Number 02, j/2.036j MIT (Fall 2018)
") Problem Set Number 0, 18.385j/.036j MIT (Fall 018) Rodolfo R. Rosales (MIT, Math. Dept., room -337, Cambridge, MA 0139) September 6, 018 Due October 4, 018. Turn it in (by 3PM) at the Math. Problem Set
Problem Set Number 0, 18.385j/.036j MIT (Fall 018) Rodolfo R. Rosales (MIT, Math. Dept., room -337, Cambridge, MA 0139) September 6, 018 Due October 4, 018. Turn it in (by 3PM) at the Math. Problem Set
Problem set 7 Math 207A, Fall 2011 Solutions
 Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
MANY scientists believe that pulse-coupled neural networks
 IEEE TRANSACTIONS ON NEURAL NETWORKS, VOL. 10, NO. 3, MAY 1999 499 Class 1 Neural Excitability, Conventional Synapses, Weakly Connected Networks, and Mathematical Foundations of Pulse-Coupled Models Eugene
IEEE TRANSACTIONS ON NEURAL NETWORKS, VOL. 10, NO. 3, MAY 1999 499 Class 1 Neural Excitability, Conventional Synapses, Weakly Connected Networks, and Mathematical Foundations of Pulse-Coupled Models Eugene
Canonical Neural Models 1
 Canonical Neural Models 1 Frank Hoppensteadt 1 and Eugene zhikevich 2 ntroduction Mathematical modeling is a powerful tool in studying fundamental principles of information processing in the brain. Unfortunately,
Canonical Neural Models 1 Frank Hoppensteadt 1 and Eugene zhikevich 2 ntroduction Mathematical modeling is a powerful tool in studying fundamental principles of information processing in the brain. Unfortunately,
Single-Cell and Mean Field Neural Models
 1 Single-Cell and Mean Field Neural Models Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 The neuron
1 Single-Cell and Mean Field Neural Models Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 The neuron
Introduction to bifurcations
 Introduction to bifurcations Marc R. Roussel September 6, Introduction Most dynamical systems contain parameters in addition to variables. A general system of ordinary differential equations (ODEs) could
Introduction to bifurcations Marc R. Roussel September 6, Introduction Most dynamical systems contain parameters in addition to variables. A general system of ordinary differential equations (ODEs) could
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 14, 2019, at 08 30 12 30 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 14, 2019, at 08 30 12 30 Johanneberg Kristian
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Nonlinear Autonomous Systems of Differential
 Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Chapter 6 Nonlinear Systems and Phenomena. Friday, November 2, 12
 Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
1 Hodgkin-Huxley Theory of Nerve Membranes: The FitzHugh-Nagumo model
 1 Hodgkin-Huxley Theory of Nerve Membranes: The FitzHugh-Nagumo model Alan Hodgkin and Andrew Huxley developed the first quantitative model of the propagation of an electrical signal (the action potential)
1 Hodgkin-Huxley Theory of Nerve Membranes: The FitzHugh-Nagumo model Alan Hodgkin and Andrew Huxley developed the first quantitative model of the propagation of an electrical signal (the action potential)
Neural Modeling and Computational Neuroscience. Claudio Gallicchio
 Neural Modeling and Computational Neuroscience Claudio Gallicchio 1 Neuroscience modeling 2 Introduction to basic aspects of brain computation Introduction to neurophysiology Neural modeling: Elements
Neural Modeling and Computational Neuroscience Claudio Gallicchio 1 Neuroscience modeling 2 Introduction to basic aspects of brain computation Introduction to neurophysiology Neural modeling: Elements
MATH 215/255 Solutions to Additional Practice Problems April dy dt
 . For the nonlinear system MATH 5/55 Solutions to Additional Practice Problems April 08 dx dt = x( x y, dy dt = y(.5 y x, x 0, y 0, (a Show that if x(0 > 0 and y(0 = 0, then the solution (x(t, y(t of the
. For the nonlinear system MATH 5/55 Solutions to Additional Practice Problems April 08 dx dt = x( x y, dy dt = y(.5 y x, x 0, y 0, (a Show that if x(0 > 0 and y(0 = 0, then the solution (x(t, y(t of the
Neural Excitability in a Subcritical Hopf Oscillator with a Nonlinear Feedback
 Neural Excitability in a Subcritical Hopf Oscillator with a Nonlinear Feedback Gautam C Sethia and Abhijit Sen Institute for Plasma Research, Bhat, Gandhinagar 382 428, INDIA Motivation Neural Excitability
Neural Excitability in a Subcritical Hopf Oscillator with a Nonlinear Feedback Gautam C Sethia and Abhijit Sen Institute for Plasma Research, Bhat, Gandhinagar 382 428, INDIA Motivation Neural Excitability
Section 9.3 Phase Plane Portraits (for Planar Systems)
") Section 9.3 Phase Plane Portraits (for Planar Systems) Key Terms: Equilibrium point of planer system yꞌ = Ay o Equilibrium solution Exponential solutions o Half-line solutions Unstable solution Stable
Section 9.3 Phase Plane Portraits (for Planar Systems) Key Terms: Equilibrium point of planer system yꞌ = Ay o Equilibrium solution Exponential solutions o Half-line solutions Unstable solution Stable
The selection of mixed-mode oscillations in a Hodgkin-Huxley model with multiple timescales
 CHAOS 18, 015105 2008 The selection of mixed-mode oscillations in a Hodgkin-Huxley model with multiple timescales Jonathan Rubin Department of Mathematics, University of Pittsburgh, Pittsburgh, Pennsylvania
CHAOS 18, 015105 2008 The selection of mixed-mode oscillations in a Hodgkin-Huxley model with multiple timescales Jonathan Rubin Department of Mathematics, University of Pittsburgh, Pittsburgh, Pennsylvania
1. < 0: the eigenvalues are real and have opposite signs; the fixed point is a saddle point
 Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
Solving a Linear System τ = trace(a) = a + d = λ 1 + λ 2 λ 1,2 = τ± = det(a) = ad bc = λ 1 λ 2 Classification of Fixed Points τ 2 4 1. < 0: the eigenvalues are real and have opposite signs; the fixed point
Synchronization of Elliptic Bursters
 SIAM REVIEW Vol. 43,No. 2,pp. 315 344 c 2001 Society for Industrial and Applied Mathematics Synchronization of Elliptic Bursters Eugene M. Izhikevich Abstract. Periodic bursting behavior in neurons is
SIAM REVIEW Vol. 43,No. 2,pp. 315 344 c 2001 Society for Industrial and Applied Mathematics Synchronization of Elliptic Bursters Eugene M. Izhikevich Abstract. Periodic bursting behavior in neurons is
Lotka Volterra Predator-Prey Model with a Predating Scavenger
 Lotka Volterra Predator-Prey Model with a Predating Scavenger Monica Pescitelli Georgia College December 13, 2013 Abstract The classic Lotka Volterra equations are used to model the population dynamics
Lotka Volterra Predator-Prey Model with a Predating Scavenger Monica Pescitelli Georgia College December 13, 2013 Abstract The classic Lotka Volterra equations are used to model the population dynamics
Is chaos possible in 1d? - yes - no - I don t know. What is the long term behavior for the following system if x(0) = π/2?
 = π/2?") Is chaos possible in 1d? - yes - no - I don t know What is the long term behavior for the following system if x(0) = π/2? In the insect outbreak problem, what kind of bifurcation occurs at fixed value
Is chaos possible in 1d? - yes - no - I don t know What is the long term behavior for the following system if x(0) = π/2? In the insect outbreak problem, what kind of bifurcation occurs at fixed value
10 Back to planar nonlinear systems
 10 Back to planar nonlinear sstems 10.1 Near the equilibria Recall that I started talking about the Lotka Volterra model as a motivation to stud sstems of two first order autonomous equations of the form
10 Back to planar nonlinear sstems 10.1 Near the equilibria Recall that I started talking about the Lotka Volterra model as a motivation to stud sstems of two first order autonomous equations of the form
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
Mixed mode oscillations as a mechanism for pseudo-plateau bursting
 J Comput Neurosci (2010) 28:443 458 DOI 10.1007/s10827-010-0226-7 Mixed mode oscillations as a mechanism for pseudo-plateau bursting Theodore Vo Richard Bertram Joel Tabak Martin Wechselberger Received:
J Comput Neurosci (2010) 28:443 458 DOI 10.1007/s10827-010-0226-7 Mixed mode oscillations as a mechanism for pseudo-plateau bursting Theodore Vo Richard Bertram Joel Tabak Martin Wechselberger Received:
Dynamical systems tutorial. Gregor Schöner, INI, RUB
 Dynamical systems tutorial Gregor Schöner, INI, RUB Dynamical systems: Tutorial the word dynamics time-varying measures range of a quantity forces causing/accounting for movement => dynamical systems dynamical
Dynamical systems tutorial Gregor Schöner, INI, RUB Dynamical systems: Tutorial the word dynamics time-varying measures range of a quantity forces causing/accounting for movement => dynamical systems dynamical
Dynamical Systems and Chaos Part I: Theoretical Techniques. Lecture 4: Discrete systems + Chaos. Ilya Potapov Mathematics Department, TUT Room TD325
 Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
LIMIT CYCLE OSCILLATORS
 MCB 137 EXCITABLE & OSCILLATORY SYSTEMS WINTER 2008 LIMIT CYCLE OSCILLATORS The Fitzhugh-Nagumo Equations The best example of an excitable phenomenon is the firing of a nerve: according to the Hodgkin
MCB 137 EXCITABLE & OSCILLATORY SYSTEMS WINTER 2008 LIMIT CYCLE OSCILLATORS The Fitzhugh-Nagumo Equations The best example of an excitable phenomenon is the firing of a nerve: according to the Hodgkin
Simple models of neurons!! Lecture 4!
 Simple models of neurons!! Lecture 4! 1! Recap: Phase Plane Analysis! 2! FitzHugh-Nagumo Model! Membrane potential K activation variable Notes from Zillmer, INFN 3! FitzHugh Nagumo Model Demo! 4! Phase
Simple models of neurons!! Lecture 4! 1! Recap: Phase Plane Analysis! 2! FitzHugh-Nagumo Model! Membrane potential K activation variable Notes from Zillmer, INFN 3! FitzHugh Nagumo Model Demo! 4! Phase
154 Chapter 9 Hints, Answers, and Solutions The particular trajectories are highlighted in the phase portraits below.
 54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
Electrophysiology of the neuron
 School of Mathematical Sciences G4TNS Theoretical Neuroscience Electrophysiology of the neuron Electrophysiology is the study of ionic currents and electrical activity in cells and tissues. The work of
School of Mathematical Sciences G4TNS Theoretical Neuroscience Electrophysiology of the neuron Electrophysiology is the study of ionic currents and electrical activity in cells and tissues. The work of
Nonlinear Control Lecture 2:Phase Plane Analysis
 Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2010 r. Farzaneh Abdollahi Nonlinear Control Lecture 2 1/53
Nonlinear Control Lecture 2:Phase Plane Analysis Farzaneh Abdollahi Department of Electrical Engineering Amirkabir University of Technology Fall 2010 r. Farzaneh Abdollahi Nonlinear Control Lecture 2 1/53
Journal of Differential Equations
 J. Differential Equations 248 (2010 2841 2888 Contents lists available at ScienceDirect Journal of Differential Equations www.elsevier.com/locate/jde Local analysis near a folded saddle-node singularity
J. Differential Equations 248 (2010 2841 2888 Contents lists available at ScienceDirect Journal of Differential Equations www.elsevier.com/locate/jde Local analysis near a folded saddle-node singularity
MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation
 MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation 1 Bifurcations in Multiple Dimensions When we were considering one-dimensional systems, we saw that subtle changes in parameter
MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation 1 Bifurcations in Multiple Dimensions When we were considering one-dimensional systems, we saw that subtle changes in parameter
2182. Hopf bifurcation analysis and control of three-dimensional Prescott neuron model
 2182. Hopf bifurcation analysis and control of three-dimensional Prescott neuron model Chunhua Yuan 1, Jiang Wang 2 School of Electrical Engineering and Automation, Tianjin University, Tianjin, China 2
2182. Hopf bifurcation analysis and control of three-dimensional Prescott neuron model Chunhua Yuan 1, Jiang Wang 2 School of Electrical Engineering and Automation, Tianjin University, Tianjin, China 2
Examples include: (a) the Lorenz system for climate and weather modeling (b) the Hodgkin-Huxley system for neuron modeling
 the Lorenz system for climate and weather modeling (b) the Hodgkin-Huxley system for neuron modeling") 1 Introduction Many natural processes can be viewed as dynamical systems, where the system is represented by a set of state variables and its evolution governed by a set of differential equations. Examples
1 Introduction Many natural processes can be viewed as dynamical systems, where the system is represented by a set of state variables and its evolution governed by a set of differential equations. Examples
Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form
 Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form d x x 1 = A, where A = dt y y a11 a 12 a 21 a 22 Here the entries of the coefficient matrix
Linear Planar Systems Math 246, Spring 2009, Professor David Levermore We now consider linear systems of the form d x x 1 = A, where A = dt y y a11 a 12 a 21 a 22 Here the entries of the coefficient matrix
Single neuron models. L. Pezard Aix-Marseille University
 Single neuron models L. Pezard Aix-Marseille University Biophysics Biological neuron Biophysics Ionic currents Passive properties Active properties Typology of models Compartmental models Differential
Single neuron models L. Pezard Aix-Marseille University Biophysics Biological neuron Biophysics Ionic currents Passive properties Active properties Typology of models Compartmental models Differential
EE222 - Spring 16 - Lecture 2 Notes 1
 EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10)
 Fake Past Exam (TT 10)") Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Chapter 7. Nonlinear Systems. 7.1 Introduction
 Nonlinear Systems Chapter 7 The scientist does not study nature because it is useful; he studies it because he delights in it, and he delights in it because it is beautiful. - Jules Henri Poincaré (1854-1912)
Nonlinear Systems Chapter 7 The scientist does not study nature because it is useful; he studies it because he delights in it, and he delights in it because it is beautiful. - Jules Henri Poincaré (1854-1912)
Localized activity patterns in excitatory neuronal networks
 Localized activity patterns in excitatory neuronal networks Jonathan Rubin Amitabha Bose February 3, 2004 Abstract. The existence of localized activity patterns, or bumps, has been investigated in a variety
Localized activity patterns in excitatory neuronal networks Jonathan Rubin Amitabha Bose February 3, 2004 Abstract. The existence of localized activity patterns, or bumps, has been investigated in a variety
APPPHYS217 Tuesday 25 May 2010
 APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
TWO DIMENSIONAL FLOWS. Lecture 5: Limit Cycles and Bifurcations
 TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
E209A: Analysis and Control of Nonlinear Systems Problem Set 3 Solutions
 E09A: Analysis and Control of Nonlinear Systems Problem Set 3 Solutions Michael Vitus Stanford University Winter 007 Problem : Planar phase portraits. Part a Figure : Problem a This phase portrait is correct.
E09A: Analysis and Control of Nonlinear Systems Problem Set 3 Solutions Michael Vitus Stanford University Winter 007 Problem : Planar phase portraits. Part a Figure : Problem a This phase portrait is correct.
Mathematical Foundations of Neuroscience - Lecture 3. Electrophysiology of neurons - continued
 Mathematical Foundations of Neuroscience - Lecture 3. Electrophysiology of neurons - continued Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland
Mathematical Foundations of Neuroscience - Lecture 3. Electrophysiology of neurons - continued Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland
BIFURCATION ANALYSIS OF A GENERAL CLASS OF NONLINEAR INTEGRATE-AND-FIRE NEURONS
 SIAM J. APPL. MATH. Vol. 68, No. 4, pp. 45 79 c 28 Society for Industrial and Applied Mathematics BIFURCATION ANALYSIS OF A GENERAL CLASS OF NONLINEAR INTEGRATE-AND-FIRE NEURONS JONATHAN TOUBOUL Abstract.
SIAM J. APPL. MATH. Vol. 68, No. 4, pp. 45 79 c 28 Society for Industrial and Applied Mathematics BIFURCATION ANALYSIS OF A GENERAL CLASS OF NONLINEAR INTEGRATE-AND-FIRE NEURONS JONATHAN TOUBOUL Abstract.
A Study of the Van der Pol Equation
 A Study of the Van der Pol Equation Kai Zhe Tan, s1465711 September 16, 2016 Abstract The Van der Pol equation is famous for modelling biological systems as well as being a good model to study its multiple
A Study of the Van der Pol Equation Kai Zhe Tan, s1465711 September 16, 2016 Abstract The Van der Pol equation is famous for modelling biological systems as well as being a good model to study its multiple
Calculus and Differential Equations II
 MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
Stochastic differential equations in neuroscience
 Stochastic differential equations in neuroscience Nils Berglund MAPMO, Orléans (CNRS, UMR 6628) http://www.univ-orleans.fr/mapmo/membres/berglund/ Barbara Gentz, Universität Bielefeld Damien Landon, MAPMO-Orléans
Stochastic differential equations in neuroscience Nils Berglund MAPMO, Orléans (CNRS, UMR 6628) http://www.univ-orleans.fr/mapmo/membres/berglund/ Barbara Gentz, Universität Bielefeld Damien Landon, MAPMO-Orléans
Physics: spring-mass system, planet motion, pendulum. Biology: ecology problem, neural conduction, epidemics
 Applications of nonlinear ODE systems: Physics: spring-mass system, planet motion, pendulum Chemistry: mixing problems, chemical reactions Biology: ecology problem, neural conduction, epidemics Economy:
Applications of nonlinear ODE systems: Physics: spring-mass system, planet motion, pendulum Chemistry: mixing problems, chemical reactions Biology: ecology problem, neural conduction, epidemics Economy:
Fundamentals of Dynamical Systems / Discrete-Time Models. Dr. Dylan McNamara people.uncw.edu/ mcnamarad
 Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Classification of Phase Portraits at Equilibria for u (t) = f( u(t))
 = f( u(t))") Classification of Phase Portraits at Equilibria for u t = f ut Transfer of Local Linearized Phase Portrait Transfer of Local Linearized Stability How to Classify Linear Equilibria Justification of the
Classification of Phase Portraits at Equilibria for u t = f ut Transfer of Local Linearized Phase Portrait Transfer of Local Linearized Stability How to Classify Linear Equilibria Justification of the
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
QUARTERLY OF APPLIED MATHEMATICS
 QUARTERLY OF APPLIED MATHEMATICS Volume LIV December 1996 Number 4 DECEMBER 1996, PAGES 601-607 ON EXISTENCE OF PERIODIC ORBITS FOR THE FITZHUGH NERVE SYSTEM By S. A. TRESKOV and E. P. VOLOKITIN Institute
QUARTERLY OF APPLIED MATHEMATICS Volume LIV December 1996 Number 4 DECEMBER 1996, PAGES 601-607 ON EXISTENCE OF PERIODIC ORBITS FOR THE FITZHUGH NERVE SYSTEM By S. A. TRESKOV and E. P. VOLOKITIN Institute
MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation.
 MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation. Bifurcation theory The object of bifurcation theory is to study changes that maps undergo
MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation. Bifurcation theory The object of bifurcation theory is to study changes that maps undergo
Dynamical systems in neuroscience. Pacific Northwest Computational Neuroscience Connection October 1-2, 2010
 Dynamical systems in neuroscience Pacific Northwest Computational Neuroscience Connection October 1-2, 2010 What do I mean by a dynamical system? Set of state variables Law that governs evolution of state
Dynamical systems in neuroscience Pacific Northwest Computational Neuroscience Connection October 1-2, 2010 What do I mean by a dynamical system? Set of state variables Law that governs evolution of state
Linearization of Differential Equation Models
 Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
Linearization of Differential Equation Models 1 Motivation We cannot solve most nonlinear models, so we often instead try to get an overall feel for the way the model behaves: we sometimes talk about looking
Biological Modeling of Neural Networks
 Week 3 part 1 : Rection of the Hodgkin-Huxley Model 3.1 From Hodgkin-Huxley to 2D Biological Modeling of Neural Netorks - Overvie: From 4 to 2 dimensions - MathDetour 1: Exploiting similarities - MathDetour
Week 3 part 1 : Rection of the Hodgkin-Huxley Model 3.1 From Hodgkin-Huxley to 2D Biological Modeling of Neural Netorks - Overvie: From 4 to 2 dimensions - MathDetour 1: Exploiting similarities - MathDetour
Phase Locking. 1 of of 10. The PRC's amplitude determines which frequencies a neuron locks to. The PRC's slope determines if locking is stable
 Printed from the Mathematica Help Browser 1 1 of 10 Phase Locking A neuron phase-locks to a periodic input it spikes at a fixed delay [Izhikevich07]. The PRC's amplitude determines which frequencies a
Printed from the Mathematica Help Browser 1 1 of 10 Phase Locking A neuron phase-locks to a periodic input it spikes at a fixed delay [Izhikevich07]. The PRC's amplitude determines which frequencies a
Edward Lorenz. Professor of Meteorology at the Massachusetts Institute of Technology
 The Lorenz system Edward Lorenz Professor of Meteorology at the Massachusetts Institute of Technology In 1963 derived a three dimensional system in efforts to model long range predictions for the weather
The Lorenz system Edward Lorenz Professor of Meteorology at the Massachusetts Institute of Technology In 1963 derived a three dimensional system in efforts to model long range predictions for the weather
Solutions to Final Exam Sample Problems, Math 246, Spring 2011
 Solutions to Final Exam Sample Problems, Math 246, Spring 2 () Consider the differential equation dy dt = (9 y2 )y 2 (a) Identify its equilibrium (stationary) points and classify their stability (b) Sketch
Solutions to Final Exam Sample Problems, Math 246, Spring 2 () Consider the differential equation dy dt = (9 y2 )y 2 (a) Identify its equilibrium (stationary) points and classify their stability (b) Sketch
Single-Compartment Neural Models
 Single-Compartment Neural Models BENG/BGGN 260 Neurodynamics University of California, San Diego Week 2 BENG/BGGN 260 Neurodynamics (UCSD) Single-Compartment Neural Models Week 2 1 / 18 Reading Materials
Single-Compartment Neural Models BENG/BGGN 260 Neurodynamics University of California, San Diego Week 2 BENG/BGGN 260 Neurodynamics (UCSD) Single-Compartment Neural Models Week 2 1 / 18 Reading Materials
Half of Final Exam Name: Practice Problems October 28, 2014
 Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
arxiv: v3 [math.ds] 27 Nov 2013
![arxiv: v3 [math.ds] 27 Nov 2013](/thumbs/83/88959060.jpg "arxiv: v3 [math.ds] 27 Nov 2013") Modeling the modulation of neuronal bursting: a singularity theory approach arxiv:1305.7364v3 [math.ds] 27 Nov 2013 Alessio Franci 1,, Guillaume Drion 2,3, & Rodolphe Sepulchre 2,4 1 INRIA Lille-Nord Europe,
Modeling the modulation of neuronal bursting: a singularity theory approach arxiv:1305.7364v3 [math.ds] 27 Nov 2013 Alessio Franci 1,, Guillaume Drion 2,3, & Rodolphe Sepulchre 2,4 1 INRIA Lille-Nord Europe,
Def. (a, b) is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)
 is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)") Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
Biophysical Basis for Three Distinct Dynamical Mechanisms of Action Potential Initiation
 Biophysical Basis for Three Distinct Dynamical Mechanisms of Action Potential Initiation Steven A. Prescott 1,2 *, Yves De Koninck 3, Terrence J. Sejnowski 1,2,4 1 Computational Neurobiology Laboratory,
Biophysical Basis for Three Distinct Dynamical Mechanisms of Action Potential Initiation Steven A. Prescott 1,2 *, Yves De Koninck 3, Terrence J. Sejnowski 1,2,4 1 Computational Neurobiology Laboratory,
Voltage-clamp and Hodgkin-Huxley models
 Voltage-clamp and Hodgkin-Huxley models Read: Hille, Chapters 2-5 (best) Koch, Chapters 6, 8, 9 See also Clay, J. Neurophysiol. 80:903-913 (1998) (for a recent version of the HH squid axon model) Rothman
Voltage-clamp and Hodgkin-Huxley models Read: Hille, Chapters 2-5 (best) Koch, Chapters 6, 8, 9 See also Clay, J. Neurophysiol. 80:903-913 (1998) (for a recent version of the HH squid axon model) Rothman
Dynamics of Modified Leslie-Gower Predator-Prey Model with Predator Harvesting
 International Journal of Basic & Applied Sciences IJBAS-IJENS Vol:13 No:05 55 Dynamics of Modified Leslie-Gower Predator-Prey Model with Predator Harvesting K. Saleh Department of Mathematics, King Fahd
International Journal of Basic & Applied Sciences IJBAS-IJENS Vol:13 No:05 55 Dynamics of Modified Leslie-Gower Predator-Prey Model with Predator Harvesting K. Saleh Department of Mathematics, King Fahd
A Mathematical Study of Electrical Bursting in Pituitary Cells
 A Mathematical Study of Electrical Bursting in Pituitary Cells Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Collaborators on
A Mathematical Study of Electrical Bursting in Pituitary Cells Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Collaborators on
Bifurcation Analysis of Neuronal Bursters Models
 Bifurcation Analysis of Neuronal Bursters Models B. Knowlton, W. McClure, N. Vu REU Final Presentation August 3, 2017 Overview Introduction Stability Bifurcations The Hindmarsh-Rose Model Our Contributions
Bifurcation Analysis of Neuronal Bursters Models B. Knowlton, W. McClure, N. Vu REU Final Presentation August 3, 2017 Overview Introduction Stability Bifurcations The Hindmarsh-Rose Model Our Contributions
Multistability in Bursting Patterns in a Model of a Multifunctional Central Pattern Generator.
 Georgia State University ScholarWorks @ Georgia State University Mathematics Theses Department of Mathematics and Statistics 7-15-2009 Multistability in Bursting Patterns in a Model of a Multifunctional
Georgia State University ScholarWorks @ Georgia State University Mathematics Theses Department of Mathematics and Statistics 7-15-2009 Multistability in Bursting Patterns in a Model of a Multifunctional
CHAPTER 6 HOPF-BIFURCATION IN A TWO DIMENSIONAL NONLINEAR DIFFERENTIAL EQUATION
 CHAPTER 6 HOPF-BIFURCATION IN A TWO DIMENSIONAL NONLINEAR DIFFERENTIAL EQUATION [Discussion on this chapter is based on our paper entitled Hopf-Bifurcation Ina Two Dimensional Nonlinear Differential Equation,
CHAPTER 6 HOPF-BIFURCATION IN A TWO DIMENSIONAL NONLINEAR DIFFERENTIAL EQUATION [Discussion on this chapter is based on our paper entitled Hopf-Bifurcation Ina Two Dimensional Nonlinear Differential Equation,
Mathematical Analysis of Bursting Electrical Activity in Nerve and Endocrine Cells
 Mathematical Analysis of Bursting Electrical Activity in Nerve and Endocrine Cells Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University
Mathematical Analysis of Bursting Electrical Activity in Nerve and Endocrine Cells Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University
Practice Problems for Final Exam
 Math 1280 Spring 2016 Practice Problems for Final Exam Part 2 (Sections 6.6, 6.7, 6.8, and chapter 7) S o l u t i o n s 1. Show that the given system has a nonlinear center at the origin. ẋ = 9y 5y 5,
Math 1280 Spring 2016 Practice Problems for Final Exam Part 2 (Sections 6.6, 6.7, 6.8, and chapter 7) S o l u t i o n s 1. Show that the given system has a nonlinear center at the origin. ẋ = 9y 5y 5,