KINEMATICS OF RIGID BODIES
|
|
|
- William Webb
- 5 years ago
- Views:
Transcription
1 KINEMTICS OF RIGI OIES
 To generte, trnsmit or control motions by using cms, gers nd linkges of vrious types nd nlyze the displcement, velocity nd")
2 Introduction In rigid body kinemtics, e use the reltionships governing the displcement, velocity nd ccelertion, but must lso ccount for the rottionl motion of the body. escription of the motion of rigid bodies is importnt for to resons: 1) To generte, trnsmit or control motions by using cms, gers nd linkges of vrious types nd nlyze the displcement, velocity nd ccelertion of the motion to determine the design geometry of the mechnicl prts. Furthermore, s result of the motion generted, forces my be developed hich must be ccounted for in the design of the prts. ) To determine the motion of rigid body cused by the forces pplied to it. Clcultion of the motion of rocket under the influence of its thrust nd grvittionl ttrction is n exmple of such problem.
3 Rigid ody ssumption rigid body is system of prticles for hich the distnces beteen the prticles nd the ngle beteen the lines remin unchnged. Thus, if ech prticle of such body is locted by position vector from reference xes ttched to nd rotting ith the body, there ill be no chnge in ny position vector s mesured from these xes. Of course this is n ideliztion since ll solid mterils chnge shpe to some extent hen forces re pplied to them.

4 Nevertheless, if the movements ssocited ith the chnges in shpe re very smll compred ith the movements of the body s hole, then the ssumption of rigidity is usully cceptble. For exmple, the displcements due to the flutter of n ircrft ing do not ffect the description of the ircrft s hole nd thus the rigid body ssumption is cceptble. On the other hnd, if the problem is one of describing, s function of time, the internl ing stress due to ing flutter, then the reltive motions of portions of the ing cnnot be neglected, nd the ing my not be considered s rigid body.
5 Plne Motion rigid body executes plne motion hen ll prts of the body move in prllel plnes. The plne of motion is considered, for convenience, to be the plne hich contins the mss center, nd e tret the body s thin slb hose motion is confined to the plne of the slb. This ideliztion dequtely describes very lrge ctegory of rigid body motions encountered in engineering. The plne motion of rigid body is divided into severl ctegories:




6 Trnsltion It is ny motion in hich every line in the body remins prllel to its originl position t ll times. In trnsltion, there is no rottion of ny line in the body. In rectiliner trnsltion, ll points in the body move in prllel stright lines. Rocket test sled


7 In curviliner trnsltion, ll points move on congruent curves. In ech of the to cses of trnsltion, the motion of the body is completely specified by the motion of ny point in the body, since ll the points hve the sme motion.




8 Fixed xis Rottion Rottion bout fixed xis is the ngulr motion bout the xis. ll prticles in rigid body move in circulr pths bout the xis of rottion nd ll lines in the body hich re perpendiculr to the xis of rottion rotte through the sme ngle t the sme time.


9 Generl Plne Motion It is the combintion of trnsltion nd rottion.
10
11 We should note tht in ech of the exmples cited, the ctul pths of ll prticles in the body re projected onto the single plne of motion. nlysis of the plne motion of rigid bodies is ccomplished either by directly clculting the bsolute displcements nd their time derivtives from the geometry involved or by utilizing the principles of reltive motion.


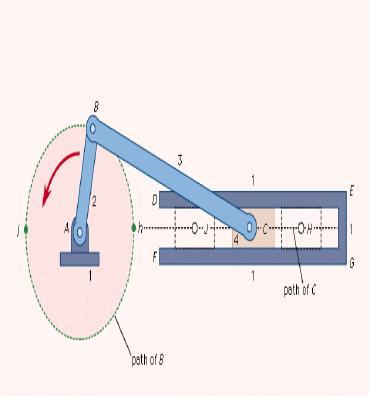
12 Rottion The rottion of rigid body is described by its ngulr motion. The figure shos rigid body hich is rotting s it undergoes plne motion in the plne of the figure. The ngulr positions of ny to lines 1 nd ttched to the body re specified by q 1 nd q mesured from ny convenient fixed reference direction. ecuse the ngle b is invrint, the reltion q = q 1 + b upon differentition ith respect to time gives q q 1 nd q q 1 or, during finite intervl, q = q 1. Thus, ll lines on rigid body in its plne of motion hve the sme ngulr displcement, the sme ngulr velocity nd the sme ngulr ccelertion.

13 The ngulr motion of line depends only on its ngulr position ith respect to ny rbitrry fixed reference nd on the time derivtives of the displcement. ngulr motion does not require the presence of fixed xis, norml to the plne of motion, bout hich the line nd the body rotte.
14 ngulr Motion Reltions The ngulr velocity nd ngulr ccelertion of rigid body in plne rottion re, respectively, the first nd second time derivtives of the ngulr position coordinte q of ny line in the plne of motion of the body. These definitions give ωdω dq q dt d dt α dq or or d q q dt q d q q dθ In ech of these reltions, the positive direction for nd, clockise or counterclockise, is the sme s tht chosen for q.
15 For rottion ith constnt ngulr ccelertion, the reltionships become 1 t t t q q q q Here q nd re the vlues of the ngulr position coordinte nd ngulr velocity t time t = nd t is the durtion of the motion considered. s seen, the reltionships given for the rotry motion of rigid bodies re nlogous to those derived for the prticle.

16 Rottion bout Fixed xis When rigid body rottes bout fixed xis, ll points other thn those on the xis move in concentric circles bout the fixed xis. Thus, for the rigid body in the figure rotting bout fixed xis norml to the plne of the figure through O, ny point such s moves in circle of rdius r. So the velocity nd the ccelertion of point cn be ritten s v r n t r r v / r v

17 These quntities my be expressed lterntively using the cross product reltionship of vector nottion. The vector formultion is especilly importnt in the nlysis of three dimensionl motion. The ngulr velocity of the rotting body my be expressed by the vector norml to the plne of rottion nd hving sense governed by the right hnd rule. From the definition of the vector cross product, the vector v is obtined by crossing into r. This cross product gives the correct mgnitude nd direction for. v r r The order of the vectors to be crossed must be retined. The reverse order gives r v v
18 The ccelertion of point is obtined by differentiting the cross product expression for, hich gives v r v r r r r v Here stnds for the ngulr ccelertion of the body. Thus, e cn rite r r r v t n
19 For three dimensionl motion of rigid body, the ngulr velocity vector my chnge direction s ell s mgnitude, nd in this cse, the ngulr ccelertion, hich is the time derivtive of ngulr velocity,, ill no longer be in the sme direction s.
20 PROLEMS 1. The ngulr velocity of ger is controlled ccording to = 1 3t, here in rd/s is positive in the clockise sense nd here t is the time in seconds. Find the net ngulr displcement q from the time t = to t = 3 s. lso find the totl number of revolutions N through hich the ger turns during the three seconds. d dq 6t dq dt dt dt q dq t dt, q 1t t 13 q 9 rd rd
21 PROLEMS oes the ger stop beteen t = nd t = 3 seconds? 1 3t q 1 q 16 dq dq t dt, q 1t t t 3 rd 1revolution dt N revolutions 1 3t 3, rd t rd, 1 s ( it q 1t stops N t 3 3 t t 7 s) rd revolutions rd

22 PROLEMS. Lod is connected to double pulley by one of the to inextensible cbles shon. The motion of the pulley is controlled by cble C, hich hs constnt ccelertion of 9 cm/s nd n initil velocity of 1 cm/s, both directed to the right. etermine, ) The number of revolutions executed by the inner pulley for t = seconds. b) The velocity nd chnge in position of the lod fter seconds. c) The ccelertion of point on the rim of the inner pulley t t =. 3 cm 5 cm
23 ) The number of revolutions executed by the inner pulley for t = seconds. v r v C O O t v 3 r r o cm o O t 1 cm / s 1 q qo ot t Number of revolutions o v r r O t t x rev cm / s rd / s rd / s.4.3() 1rd / s rd, ( c) 1 q.4().3() 1 rev rd x 1.4 rd ( c) cm.3 5 cm rev
24 b) The velocity nd chnge in position of the lod fter seconds. v y r r 1 (5) q ( 5 cm / s )( 14. ) 7 cm ( uprds) c) The ccelertion of point on the rim of the inner pulley t t =. t t t n 9 cm / s r o.4 rd (3)(.4) 1/ 1. cm / s n o t / s 4.8 cm / s 3 cm 5 cm
25 PROLEMS 3. The motor shon is used to turn heel by the pulley ttched to it. If the pulley strts rotting from rest ith n ngulr ccelertion of = rd/s, determine the mgnitudes of the velocity nd ccelertion of point P on the heel, fter the heel hs turned 1 revolutions. ssume the trnsmission belt does not slip on the pulley nd the heel. q 6.83 rd s q r q r q (.4) q rd O () q 1 qo 1 rev rd rd / s C v v C P r r r 6.87(.4).75 m / s ( 15. ) (.4) 6.87 rd / s C t P n r.3.4 r.75 r rd / s.4(6.87) r C t m / s Pt.3 m / s s q r s q r P P n Pt 18.9 m / s
26 bsolute Motion In the first pproch in rigid body kinemtics, the bsolute motion nlysis, e mke use of the geometric reltions hich define the configurtion of the body involved nd then proceed to tke the time derivtives of the defining geometric reltions to obtin velocities nd ccelertions. The constrined motion of connected prticles is lso n bsolute motion nlysis. For the pulley configurtions, the relevnt velocities nd ccelertions ere determined by successive differentition of the lengths of the connecting cbles. In rigid body motion, the defining geometric reltions include both liner nd ngulr vribles nd, therefore, the time derivtives of these quntities ill involve both liner nd ngulr velocities nd liner nd ngulr ccelertions.
27 PROLEM heel of rdius r rolls on flt surfce ithout slipping. etermine the ngulr motion of the heel in terms of the liner motion of its center O. lso determine the ccelertion of point on the rim of the heel s the point comes into contct ith the surfce on hich the heel rolls.
28 The heel rolls to the right from the dshed to the full position ithout slipping. The liner displcement of the center O is s, hich is lso the rc length C' long the rim on hich the heel rolls. The rdil line CO rottes to the ne position C'O' through the ngle q, here q is mesured from the verticl direction. If the heel does not slip, the rc C' must equl the distnce s, since in rigid body ll points ill hve the sme displcement. Thus, the displcement reltionship nd its to time derivtives give s s s rq vo r q r r q r o (q is in rdins)
29 If the heel is sloing don, ill be directed opposite to v nd nd ill hve opposite directions. When point C hs moved long its cycloidl pth to C, its ne coordintes nd their time derivtives become x s r sin q rq r sin q r x r q r q cosq r r cosq v x r q r q cosq r q sin q r r cosq r sin q 1 cosq r sin q q sin q y r r cosq r1 cosq 1 cosq v v y r q sin q v rv sin q y r q cosq r q sin q r cosq r sin q r cosq sin q

30 For the desired instnt of contct, q = nd x y r Thus the ccelertion of point C on the rim t the instnt of contct ith the ground depends only on r nd nd is directed tord the center of the heel. If desired, the velocity nd ccelertion of C t ny position q my be obtined by riting the expressions v xi yj nd xi yj. If the heel slips s it rolls, the foregoing reltions ill no longer be vlid.

31 Reltive Velocity The second pproch to rigid body kinemtics uses the principles of reltive motion. In kinemtics of prticles for motion reltive to trnslting xes, e pplied the reltive velocity eqution v v v/ to the motions of to prticles nd. We no choose to points on the sme rigid body for our to prticles. The consequence of this choice is tht the motion of one point s seen by n observer trnslting ith the other point must be circulr since the rdil distnce to the observed point from the reference point does not chnge. This observtion is the key to the successful understnding of lrge mjority of problems in the plne motion of rigid bodies.

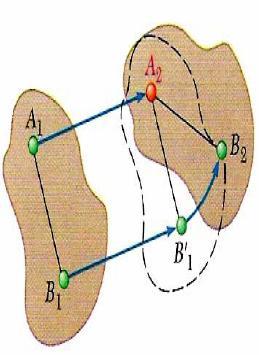
32 The figure shos rigid body moving in the plne of the figure from position to '' during time t. This movement my be visulized s occurring in to prts. First, the body trnsltes to the prllel position ''' ith the displcement r. Second, the body rottes bout ' through the ngle q, from the nonrotting reference xes x'-y' ttched to the reference point ', giving rise to the displcement r / of ith respect to.

33 To the nonrotting observer ttched to, the body ppers to undergo fixed xis rottion bout ith executing circulr motion. Point is rbitrrily chosen s the reference point for ttchment of the nonrotting reference xes x-y. Point could hve been used just s ell, in hich cse e ould observe to hve circulr motion bout considered fixed. In this cse, the sense of the rottion, counterclockise direction, is the sme hether e choose or s the reference, nd e see tht = -. r / r /
34 With s the reference point, the totl displcement of is r r r / Where r / hs the mgnitude rq s q pproches zero. We note tht the reltive liner motion r / is ccompnied by the bsolute ngulr motion q, s seen from the trnslting xes x' -y'. ividing the expression for r by the corresponding time intervl t nd pssing to the limit, e obtin the reltive velocity eqution v v v/ We should note tht in this expression the distnce r beteen nd remins constnt.
35 The mgnitude of the reltive velocity is thus seen to be hich, ith becomes r v / Using to represent the vector, e my rite the reltive velocity s the vector t r t r v t t q / lim / lim / / q r v / r / r Therefore, the reltive velocity eqution becomes r v v
36 Here, is the ngulr velocity vector norml to the plne of the motion in the sense determined by the right hnd rule. It should be noted tht the direction of the reltive velocity ill lys be perpendiculr to the line joining the points nd. Interprettion of the Reltive Velocity Eqution We cn better understnd the reltive velocity eqution by visulizing the trnsltion nd rottion components seprtely. trnsltion Fixed xis rottion
37 trnsltion Fixed xis rottion In the figure, point is chosen s the reference point nd the velocity of is the vector sum of the trnsltionl portion v, plus the rottionl portion v r, hich hs the / mgnitude v / =r, here q, the bsolute ngulr velocity of. The fct tht the reltive liner velocity is lys perpendiculr to the line joining the to points nd is n importnt key to the solution of mny problems.
38 Solution of the Reltive Velocity Eqution Solution of the reltive velocity eqution my be crried out by sclr or vector lgebr or by grphic interprettion. In the sclr pproch, ech term in the reltive motion eqution my be ritten in terms i j of its nd components, from hich e ill obtin to sclr equtions.
39 Reltive ccelertion Consider the eqution v v v/ hich describes the reltive velocities of to points nd in plne motion in terms of nonrotting reference xes. y differentiting the eqution ith respect to time, e obtin the reltive ccelertion eqution, hich is / v v v/ or This eqution sttes tht the ccelertion of point equls the vector sum of the ccelertion of point nd the ccelertion hich ppers to hve to nonrotting observer moving ith.
40 Reltive ccelertion ue to Rottion If points nd re locted on the sme rigid body nd in the plne of motion, the distnce r beteen them remins constnt so tht the observer moving ith perceives to hve circulr motion bout. ecuse the reltive motion is circulr, it follos tht the reltive ccelertion term ill hve both norml component directed from tord due to the chnge of direction of v / nd tngentil component perpendiculr to due to the chnge in mgnitude of v /. Thus, e my rite, / n / t Where the mgnitudes of the reltive ccelertion components re / v/ / v r / n t / r r
41 In vector nottion the ccelertion components re r / r / n t In these reltionships, is the ngulr velocity nd is the ngulr ccelertion of the body. The vector locting from is r. It is importnt to observe tht the reltive ccelertion terms depend on the respective bsolute ngulr velocity nd the bsolute ngulr ccelertion. The reltive ccelertion eqution, thus, becomes r r
42 Interprettion of the Reltive ccelertion Eqution The mening of reltive ccelertion eqution is indicted in the figure hich shos rigid body in plne motion ith points nd moving long seprte curved pths ith bsolute ccelertions nd. Contrry to the cse ith velocities, the ccelertions nd re, in generl, not tngent to the pths described by nd hen these pths re curviliner.


43 The figure shos the ccelertion of to be composed of to prts: the ccelertion of nd the ccelertion of ith respect to. sketch shoing the reference point s fixed is useful in disclosing the correct sense of the to components of the reltive ccelertion term.
44 lterntively, e my express the ccelertion of in terms of the ccelertion of, hich puts the nonrotting reference xes on rther thn. This order gives / / Here nd its n nd t components re the negtives of nd its n nd t components / ( ). / /


45 Solution of the Reltive ccelertion Eqution s in the cse of the reltive velocity eqution, the reltive ccelertion eqution my be crried out by sclr or vector lgebr or by grphicl construction. ecuse the norml ccelertion components depend on velocities, it is generlly necessry to solve for the velocities before the ccelertion clcultions cn be mde.
KINEMATICS OF RIGID BODIES
 KINEMTICS OF RIGID ODIES Introduction In rigid body kinemtics, e use the reltionships governing the displcement, velocity nd ccelertion, but must lso ccount for the rottionl motion of the body. Description
KINEMTICS OF RIGID ODIES Introduction In rigid body kinemtics, e use the reltionships governing the displcement, velocity nd ccelertion, but must lso ccount for the rottionl motion of the body. Description
THREE-DIMENSIONAL KINEMATICS OF RIGID BODIES
 THREE-DIMENSIONAL KINEMATICS OF RIGID BODIES 1. TRANSLATION Figure shows rigid body trnslting in three-dimensionl spce. Any two points in the body, such s A nd B, will move long prllel stright lines if
THREE-DIMENSIONAL KINEMATICS OF RIGID BODIES 1. TRANSLATION Figure shows rigid body trnslting in three-dimensionl spce. Any two points in the body, such s A nd B, will move long prllel stright lines if
INTRODUCTION. The three general approaches to the solution of kinetics problems are:
 INTRODUCTION According to Newton s lw, prticle will ccelerte when it is subjected to unblnced forces. Kinetics is the study of the reltions between unblnced forces nd the resulting chnges in motion. The
INTRODUCTION According to Newton s lw, prticle will ccelerte when it is subjected to unblnced forces. Kinetics is the study of the reltions between unblnced forces nd the resulting chnges in motion. The
Partial Derivatives. Limits. For a single variable function f (x), the limit lim
, the limit lim") Limits Prtil Derivtives For single vrible function f (x), the limit lim x f (x) exists only if the right-hnd side limit equls to the left-hnd side limit, i.e., lim f (x) = lim f (x). x x + For two vribles
Limits Prtil Derivtives For single vrible function f (x), the limit lim x f (x) exists only if the right-hnd side limit equls to the left-hnd side limit, i.e., lim f (x) = lim f (x). x x + For two vribles
E S dition event Vector Mechanics for Engineers: Dynamics h Due, next Wednesday, 07/19/2006! 1-30
 Vector Mechnics for Engineers: Dynmics nnouncement Reminders Wednesdy s clss will strt t 1:00PM. Summry of the chpter 11 ws posted on website nd ws sent you by emil. For the students, who needs hrdcopy,
Vector Mechnics for Engineers: Dynmics nnouncement Reminders Wednesdy s clss will strt t 1:00PM. Summry of the chpter 11 ws posted on website nd ws sent you by emil. For the students, who needs hrdcopy,
Analytically, vectors will be represented by lowercase bold-face Latin letters, e.g. a, r, q.
 1.1 Vector Alger 1.1.1 Sclrs A physicl quntity which is completely descried y single rel numer is clled sclr. Physiclly, it is something which hs mgnitude, nd is completely descried y this mgnitude. Exmples
1.1 Vector Alger 1.1.1 Sclrs A physicl quntity which is completely descried y single rel numer is clled sclr. Physiclly, it is something which hs mgnitude, nd is completely descried y this mgnitude. Exmples
ME 141. Lecture 10: Kinetics of particles: Newton s 2 nd Law
 ME 141 Engineering Mechnics Lecture 10: Kinetics of prticles: Newton s nd Lw Ahmd Shhedi Shkil Lecturer, Dept. of Mechnicl Engg, BUET E-mil: sshkil@me.buet.c.bd, shkil6791@gmil.com Website: techer.buet.c.bd/sshkil
ME 141 Engineering Mechnics Lecture 10: Kinetics of prticles: Newton s nd Lw Ahmd Shhedi Shkil Lecturer, Dept. of Mechnicl Engg, BUET E-mil: sshkil@me.buet.c.bd, shkil6791@gmil.com Website: techer.buet.c.bd/sshkil
13.4 Work done by Constant Forces
 13.4 Work done by Constnt Forces We will begin our discussion of the concept of work by nlyzing the motion of n object in one dimension cted on by constnt forces. Let s consider the following exmple: push
13.4 Work done by Constnt Forces We will begin our discussion of the concept of work by nlyzing the motion of n object in one dimension cted on by constnt forces. Let s consider the following exmple: push
Dynamics and control of mechanical systems. Content
 Dynmics nd control of mechnicl systems Dte Dy 1 (01/08) Dy (03/08) Dy 3 (05/08) Dy 4 (07/08) Dy 5 (09/08) Dy 6 (11/08) Content Review of the bsics of mechnics. Kinemtics of rigid bodies plne motion of
Dynmics nd control of mechnicl systems Dte Dy 1 (01/08) Dy (03/08) Dy 3 (05/08) Dy 4 (07/08) Dy 5 (09/08) Dy 6 (11/08) Content Review of the bsics of mechnics. Kinemtics of rigid bodies plne motion of
2/20/ :21 AM. Chapter 11. Kinematics of Particles. Mohammad Suliman Abuhaiba,Ph.D., P.E.
 //15 11:1 M Chpter 11 Kinemtics of Prticles 1 //15 11:1 M Introduction Mechnics Mechnics = science which describes nd predicts the conditions of rest or motion of bodies under the ction of forces It is
//15 11:1 M Chpter 11 Kinemtics of Prticles 1 //15 11:1 M Introduction Mechnics Mechnics = science which describes nd predicts the conditions of rest or motion of bodies under the ction of forces It is
Plate Theory. Section 11: PLATE BENDING ELEMENTS
 Section : PLATE BENDING ELEMENTS Plte Theor A plte is structurl element hose mid surfce lies in flt plne. The dimension in the direction norml to the plne is referred to s the thickness of the plte. A
Section : PLATE BENDING ELEMENTS Plte Theor A plte is structurl element hose mid surfce lies in flt plne. The dimension in the direction norml to the plne is referred to s the thickness of the plte. A
Plate Theory. Section 13: PLATE BENDING ELEMENTS
 Section : PLATE BENDING ELEENTS Wshkeic College of Engineering Plte Theor A plte is structurl element hose mid surfce lies in flt plne. The dimension in the direction norml to the plne is referred to s
Section : PLATE BENDING ELEENTS Wshkeic College of Engineering Plte Theor A plte is structurl element hose mid surfce lies in flt plne. The dimension in the direction norml to the plne is referred to s
Chapter 4 Contravariance, Covariance, and Spacetime Diagrams
 Chpter 4 Contrvrince, Covrince, nd Spcetime Digrms 4. The Components of Vector in Skewed Coordintes We hve seen in Chpter 3; figure 3.9, tht in order to show inertil motion tht is consistent with the Lorentz
Chpter 4 Contrvrince, Covrince, nd Spcetime Digrms 4. The Components of Vector in Skewed Coordintes We hve seen in Chpter 3; figure 3.9, tht in order to show inertil motion tht is consistent with the Lorentz
2. VECTORS AND MATRICES IN 3 DIMENSIONS
 2 VECTORS AND MATRICES IN 3 DIMENSIONS 21 Extending the Theory of 2-dimensionl Vectors x A point in 3-dimensionl spce cn e represented y column vector of the form y z z-xis y-xis z x y x-xis Most of the
2 VECTORS AND MATRICES IN 3 DIMENSIONS 21 Extending the Theory of 2-dimensionl Vectors x A point in 3-dimensionl spce cn e represented y column vector of the form y z z-xis y-xis z x y x-xis Most of the
Week 10: Line Integrals
 Week 10: Line Integrls Introduction In this finl week we return to prmetrised curves nd consider integrtion long such curves. We lredy sw this in Week 2 when we integrted long curve to find its length.
Week 10: Line Integrls Introduction In this finl week we return to prmetrised curves nd consider integrtion long such curves. We lredy sw this in Week 2 when we integrted long curve to find its length.
Review of Calculus, cont d
 Jim Lmbers MAT 460 Fll Semester 2009-10 Lecture 3 Notes These notes correspond to Section 1.1 in the text. Review of Clculus, cont d Riemnn Sums nd the Definite Integrl There re mny cses in which some
Jim Lmbers MAT 460 Fll Semester 2009-10 Lecture 3 Notes These notes correspond to Section 1.1 in the text. Review of Clculus, cont d Riemnn Sums nd the Definite Integrl There re mny cses in which some
DYNAMICS. Kinematics of Rigid Bodies VECTOR MECHANICS FOR ENGINEERS: Tenth Edition CHAPTER
 Tenth E CHTER 15 VECTOR MECHNICS FOR ENGINEERS: YNMICS Ferdinnd. eer E. Russell Johnston, Jr. hillip J. Cornwell Lecture Notes: rin. Self Cliforni olytechnic Stte Uniersity Kinemtics of Rigid odies 013
Tenth E CHTER 15 VECTOR MECHNICS FOR ENGINEERS: YNMICS Ferdinnd. eer E. Russell Johnston, Jr. hillip J. Cornwell Lecture Notes: rin. Self Cliforni olytechnic Stte Uniersity Kinemtics of Rigid odies 013
Lecture 5. Today: Motion in many dimensions: Circular motion. Uniform Circular Motion
 Lecture 5 Physics 2A Olg Dudko UCSD Physics Tody: Motion in mny dimensions: Circulr motion. Newton s Lws of Motion. Lws tht nswer why questions bout motion. Forces. Inerti. Momentum. Uniform Circulr Motion
Lecture 5 Physics 2A Olg Dudko UCSD Physics Tody: Motion in mny dimensions: Circulr motion. Newton s Lws of Motion. Lws tht nswer why questions bout motion. Forces. Inerti. Momentum. Uniform Circulr Motion
The Properties of Stars
 10/11/010 The Properties of Strs sses Using Newton s Lw of Grvity to Determine the ss of Celestil ody ny two prticles in the universe ttrct ech other with force tht is directly proportionl to the product
10/11/010 The Properties of Strs sses Using Newton s Lw of Grvity to Determine the ss of Celestil ody ny two prticles in the universe ttrct ech other with force tht is directly proportionl to the product
PhysicsAndMathsTutor.com
 1. A uniform circulr disc hs mss m, centre O nd rdius. It is free to rotte bout fixed smooth horizontl xis L which lies in the sme plne s the disc nd which is tngentil to the disc t the point A. The disc
1. A uniform circulr disc hs mss m, centre O nd rdius. It is free to rotte bout fixed smooth horizontl xis L which lies in the sme plne s the disc nd which is tngentil to the disc t the point A. The disc
2A1A Vector Algebra and Calculus I
 Vector Algebr nd Clculus I (23) 2AA 2AA Vector Algebr nd Clculus I Bugs/queries to sjrob@robots.ox.c.uk Michelms 23. The tetrhedron in the figure hs vertices A, B, C, D t positions, b, c, d, respectively.
Vector Algebr nd Clculus I (23) 2AA 2AA Vector Algebr nd Clculus I Bugs/queries to sjrob@robots.ox.c.uk Michelms 23. The tetrhedron in the figure hs vertices A, B, C, D t positions, b, c, d, respectively.
DEFINITION OF ASSOCIATIVE OR DIRECT PRODUCT AND ROTATION OF VECTORS
 3 DEFINITION OF ASSOCIATIVE OR DIRECT PRODUCT AND ROTATION OF VECTORS This chpter summrizes few properties of Cli ord Algebr nd describe its usefulness in e ecting vector rottions. 3.1 De nition of Associtive
3 DEFINITION OF ASSOCIATIVE OR DIRECT PRODUCT AND ROTATION OF VECTORS This chpter summrizes few properties of Cli ord Algebr nd describe its usefulness in e ecting vector rottions. 3.1 De nition of Associtive
2/2/ :36 AM. Chapter 11. Kinematics of Particles. Mohammad Suliman Abuhaiba,Ph.D., P.E.
 //16 1:36 AM Chpter 11 Kinemtics of Prticles 1 //16 1:36 AM First Em Wednesdy 4//16 3 //16 1:36 AM Introduction Mechnics Mechnics = science which describes nd predicts the conditions of rest or motion
//16 1:36 AM Chpter 11 Kinemtics of Prticles 1 //16 1:36 AM First Em Wednesdy 4//16 3 //16 1:36 AM Introduction Mechnics Mechnics = science which describes nd predicts the conditions of rest or motion
#6A&B Magnetic Field Mapping
 #6A& Mgnetic Field Mpping Gol y performing this lb experiment, you will: 1. use mgnetic field mesurement technique bsed on Frdy s Lw (see the previous experiment),. study the mgnetic fields generted by
#6A& Mgnetic Field Mpping Gol y performing this lb experiment, you will: 1. use mgnetic field mesurement technique bsed on Frdy s Lw (see the previous experiment),. study the mgnetic fields generted by
Job No. Sheet 1 of 8 Rev B. Made by IR Date Aug Checked by FH/NB Date Oct Revised by MEB Date April 2006
 Job o. Sheet 1 of 8 Rev B 10, Route de Limours -78471 St Rémy Lès Chevreuse Cedex rnce Tel : 33 (0)1 30 85 5 00 x : 33 (0)1 30 5 75 38 CLCULTO SHEET Stinless Steel Vloristion Project Design Exmple 5 Welded
Job o. Sheet 1 of 8 Rev B 10, Route de Limours -78471 St Rémy Lès Chevreuse Cedex rnce Tel : 33 (0)1 30 85 5 00 x : 33 (0)1 30 5 75 38 CLCULTO SHEET Stinless Steel Vloristion Project Design Exmple 5 Welded
APPLICATIONS OF THE DEFINITE INTEGRAL
 APPLICATIONS OF THE DEFINITE INTEGRAL. Volume: Slicing, disks nd wshers.. Volumes by Slicing. Suppose solid object hs boundries extending from x =, to x = b, nd tht its cross-section in plne pssing through
APPLICATIONS OF THE DEFINITE INTEGRAL. Volume: Slicing, disks nd wshers.. Volumes by Slicing. Suppose solid object hs boundries extending from x =, to x = b, nd tht its cross-section in plne pssing through
Version 001 HW#6 - Circular & Rotational Motion arts (00223) 1
 1") Version 001 HW#6 - Circulr & ottionl Motion rts (00223) 1 This print-out should hve 14 questions. Multiple-choice questions my continue on the next column or pge find ll choices before nswering. Circling
Version 001 HW#6 - Circulr & ottionl Motion rts (00223) 1 This print-out should hve 14 questions. Multiple-choice questions my continue on the next column or pge find ll choices before nswering. Circling
Conducting Ellipsoid and Circular Disk
 1 Problem Conducting Ellipsoid nd Circulr Disk Kirk T. McDonld Joseph Henry Lbortories, Princeton University, Princeton, NJ 08544 (September 1, 00) Show tht the surfce chrge density σ on conducting ellipsoid,
1 Problem Conducting Ellipsoid nd Circulr Disk Kirk T. McDonld Joseph Henry Lbortories, Princeton University, Princeton, NJ 08544 (September 1, 00) Show tht the surfce chrge density σ on conducting ellipsoid,
a < a+ x < a+2 x < < a+n x = b, n A i n f(x i ) x. i=1 i=1
 x. i=1 i=1") Mth 33 Volume Stewrt 5.2 Geometry of integrls. In this section, we will lern how to compute volumes using integrls defined by slice nlysis. First, we recll from Clculus I how to compute res. Given the
Mth 33 Volume Stewrt 5.2 Geometry of integrls. In this section, we will lern how to compute volumes using integrls defined by slice nlysis. First, we recll from Clculus I how to compute res. Given the
Lecture XVII. Vector functions, vector and scalar fields Definition 1 A vector-valued function is a map associating vectors to real numbers, that is
 Lecture XVII Abstrct We introduce the concepts of vector functions, sclr nd vector fields nd stress their relevnce in pplied sciences. We study curves in three-dimensionl Eucliden spce nd introduce the
Lecture XVII Abstrct We introduce the concepts of vector functions, sclr nd vector fields nd stress their relevnce in pplied sciences. We study curves in three-dimensionl Eucliden spce nd introduce the
1/31/ :33 PM. Chapter 11. Kinematics of Particles. Mohammad Suliman Abuhaiba,Ph.D., P.E.
 1/31/18 1:33 PM Chpter 11 Kinemtics of Prticles 1 1/31/18 1:33 PM First Em Sturdy 1//18 3 1/31/18 1:33 PM Introduction Mechnics Mechnics = science which describes nd predicts conditions of rest or motion
1/31/18 1:33 PM Chpter 11 Kinemtics of Prticles 1 1/31/18 1:33 PM First Em Sturdy 1//18 3 1/31/18 1:33 PM Introduction Mechnics Mechnics = science which describes nd predicts conditions of rest or motion
Plane curvilinear motion is the motion of a particle along a curved path which lies in a single plane.
 Plne curiliner motion is the motion of prticle long cured pth which lies in single plne. Before the description of plne curiliner motion in n specific set of coordintes, we will use ector nlsis to describe
Plne curiliner motion is the motion of prticle long cured pth which lies in single plne. Before the description of plne curiliner motion in n specific set of coordintes, we will use ector nlsis to describe
3. Vectors. Vectors: quantities which indicate both magnitude and direction. Examples: displacemement, velocity, acceleration
 Rutgers University Deprtment of Physics & Astronomy 01:750:271 Honors Physics I Lecture 3 Pge 1 of 57 3. Vectors Vectors: quntities which indicte both mgnitude nd direction. Exmples: displcemement, velocity,
Rutgers University Deprtment of Physics & Astronomy 01:750:271 Honors Physics I Lecture 3 Pge 1 of 57 3. Vectors Vectors: quntities which indicte both mgnitude nd direction. Exmples: displcemement, velocity,
Plates on elastic foundation
 Pltes on elstic foundtion Circulr elstic plte, xil-symmetric lod, Winkler soil (fter Timoshenko & Woinowsky-Krieger (1959) - Chpter 8) Prepred by Enzo Mrtinelli Drft version ( April 016) Introduction Winkler
Pltes on elstic foundtion Circulr elstic plte, xil-symmetric lod, Winkler soil (fter Timoshenko & Woinowsky-Krieger (1959) - Chpter 8) Prepred by Enzo Mrtinelli Drft version ( April 016) Introduction Winkler
Mathematics. Area under Curve.
 Mthemtics Are under Curve www.testprepkrt.com Tle of Content 1. Introduction.. Procedure of Curve Sketching. 3. Sketching of Some common Curves. 4. Are of Bounded Regions. 5. Sign convention for finding
Mthemtics Are under Curve www.testprepkrt.com Tle of Content 1. Introduction.. Procedure of Curve Sketching. 3. Sketching of Some common Curves. 4. Are of Bounded Regions. 5. Sign convention for finding
Plane curvilinear motion is the motion of a particle along a curved path which lies in a single plane.
 Plne curiliner motion is the motion of prticle long cured pth which lies in single plne. Before the description of plne curiliner motion in n specific set of coordintes, we will use ector nlsis to describe
Plne curiliner motion is the motion of prticle long cured pth which lies in single plne. Before the description of plne curiliner motion in n specific set of coordintes, we will use ector nlsis to describe
Classical Mechanics. From Molecular to Con/nuum Physics I WS 11/12 Emiliano Ippoli/ October, 2011
 Clssicl Mechnics From Moleculr to Con/nuum Physics I WS 11/12 Emilino Ippoli/ October, 2011 Wednesdy, October 12, 2011 Review Mthemtics... Physics Bsic thermodynmics Temperture, idel gs, kinetic gs theory,
Clssicl Mechnics From Moleculr to Con/nuum Physics I WS 11/12 Emilino Ippoli/ October, 2011 Wednesdy, October 12, 2011 Review Mthemtics... Physics Bsic thermodynmics Temperture, idel gs, kinetic gs theory,
Forces from Strings Under Tension A string under tension medites force: the mgnitude of the force from section of string is the tension T nd the direc
 Physics 170 Summry of Results from Lecture Kinemticl Vribles The position vector ~r(t) cn be resolved into its Crtesin components: ~r(t) =x(t)^i + y(t)^j + z(t)^k. Rtes of Chnge Velocity ~v(t) = d~r(t)=
Physics 170 Summry of Results from Lecture Kinemticl Vribles The position vector ~r(t) cn be resolved into its Crtesin components: ~r(t) =x(t)^i + y(t)^j + z(t)^k. Rtes of Chnge Velocity ~v(t) = d~r(t)=
Physics 201 Lab 3: Measurement of Earth s local gravitational field I Data Acquisition and Preliminary Analysis Dr. Timothy C. Black Summer I, 2018
 Physics 201 Lb 3: Mesurement of Erth s locl grvittionl field I Dt Acquisition nd Preliminry Anlysis Dr. Timothy C. Blck Summer I, 2018 Theoreticl Discussion Grvity is one of the four known fundmentl forces.
Physics 201 Lb 3: Mesurement of Erth s locl grvittionl field I Dt Acquisition nd Preliminry Anlysis Dr. Timothy C. Blck Summer I, 2018 Theoreticl Discussion Grvity is one of the four known fundmentl forces.
State space systems analysis (continued) Stability. A. Definitions A system is said to be Asymptotically Stable (AS) when it satisfies
 Stability. A. Definitions A system is said to be Asymptotically Stable (AS) when it satisfies") Stte spce systems nlysis (continued) Stbility A. Definitions A system is sid to be Asymptoticlly Stble (AS) when it stisfies ut () = 0, t > 0 lim xt () 0. t A system is AS if nd only if the impulse response
Stte spce systems nlysis (continued) Stbility A. Definitions A system is sid to be Asymptoticlly Stble (AS) when it stisfies ut () = 0, t > 0 lim xt () 0. t A system is AS if nd only if the impulse response
BME 207 Introduction to Biomechanics Spring 2018
 April 6, 28 UNIVERSITY O RHODE ISAND Deprtment of Electricl, Computer nd Biomedicl Engineering BME 27 Introduction to Biomechnics Spring 28 Homework 8 Prolem 14.6 in the textook. In ddition to prts -e,
April 6, 28 UNIVERSITY O RHODE ISAND Deprtment of Electricl, Computer nd Biomedicl Engineering BME 27 Introduction to Biomechnics Spring 28 Homework 8 Prolem 14.6 in the textook. In ddition to prts -e,
Math 124A October 04, 2011
 Mth 4A October 04, 0 Viktor Grigoryn 4 Vibrtions nd het flow In this lecture we will derive the wve nd het equtions from physicl principles. These re second order constnt coefficient liner PEs, which model
Mth 4A October 04, 0 Viktor Grigoryn 4 Vibrtions nd het flow In this lecture we will derive the wve nd het equtions from physicl principles. These re second order constnt coefficient liner PEs, which model
l 2 p2 n 4n 2, the total surface area of the
 Week 6 Lectures Sections 7.5, 7.6 Section 7.5: Surfce re of Revolution Surfce re of Cone: Let C be circle of rdius r. Let P n be n n-sided regulr polygon of perimeter p n with vertices on C. Form cone
Week 6 Lectures Sections 7.5, 7.6 Section 7.5: Surfce re of Revolution Surfce re of Cone: Let C be circle of rdius r. Let P n be n n-sided regulr polygon of perimeter p n with vertices on C. Form cone
10 Vector Integral Calculus
 Vector Integrl lculus Vector integrl clculus extends integrls s known from clculus to integrls over curves ("line integrls"), surfces ("surfce integrls") nd solids ("volume integrls"). These integrls hve
Vector Integrl lculus Vector integrl clculus extends integrls s known from clculus to integrls over curves ("line integrls"), surfces ("surfce integrls") nd solids ("volume integrls"). These integrls hve
Math 8 Winter 2015 Applications of Integration
 Mth 8 Winter 205 Applictions of Integrtion Here re few importnt pplictions of integrtion. The pplictions you my see on n exm in this course include only the Net Chnge Theorem (which is relly just the Fundmentl
Mth 8 Winter 205 Applictions of Integrtion Here re few importnt pplictions of integrtion. The pplictions you my see on n exm in this course include only the Net Chnge Theorem (which is relly just the Fundmentl
Electrical Drive 4 th Class
 University Of Technology Electricl nd Electronics Deprtment Dr Nofl ohmmed Ther Al Kyt A drive consist of three min prts : prime mover; energy trnsmitting device nd ctul pprtus (lod), hich perform the
University Of Technology Electricl nd Electronics Deprtment Dr Nofl ohmmed Ther Al Kyt A drive consist of three min prts : prime mover; energy trnsmitting device nd ctul pprtus (lod), hich perform the
AP Physics 1. Slide 1 / 71. Slide 2 / 71. Slide 3 / 71. Circular Motion. Topics of Uniform Circular Motion (UCM)
") Slide 1 / 71 Slide 2 / 71 P Physics 1 irculr Motion 2015-12-02 www.njctl.org Topics of Uniform irculr Motion (UM) Slide 3 / 71 Kinemtics of UM lick on the topic to go to tht section Period, Frequency,
Slide 1 / 71 Slide 2 / 71 P Physics 1 irculr Motion 2015-12-02 www.njctl.org Topics of Uniform irculr Motion (UM) Slide 3 / 71 Kinemtics of UM lick on the topic to go to tht section Period, Frequency,
The Wave Equation I. MA 436 Kurt Bryan
 1 Introduction The Wve Eqution I MA 436 Kurt Bryn Consider string stretching long the x xis, of indeterminte (or even infinite!) length. We wnt to derive n eqution which models the motion of the string
1 Introduction The Wve Eqution I MA 436 Kurt Bryn Consider string stretching long the x xis, of indeterminte (or even infinite!) length. We wnt to derive n eqution which models the motion of the string
Consequently, the temperature must be the same at each point in the cross section at x. Let:
 HW 2 Comments: L1-3. Derive the het eqution for n inhomogeneous rod where the therml coefficients used in the derivtion of the het eqution for homogeneous rod now become functions of position x in the
HW 2 Comments: L1-3. Derive the het eqution for n inhomogeneous rod where the therml coefficients used in the derivtion of the het eqution for homogeneous rod now become functions of position x in the
Higher Checklist (Unit 3) Higher Checklist (Unit 3) Vectors
 Higher Checklist (Unit 3) Vectors") Vectors Skill Achieved? Know tht sclr is quntity tht hs only size (no direction) Identify rel-life exmples of sclrs such s, temperture, mss, distnce, time, speed, energy nd electric chrge Know tht vector
Vectors Skill Achieved? Know tht sclr is quntity tht hs only size (no direction) Identify rel-life exmples of sclrs such s, temperture, mss, distnce, time, speed, energy nd electric chrge Know tht vector
A REVIEW OF CALCULUS CONCEPTS FOR JDEP 384H. Thomas Shores Department of Mathematics University of Nebraska Spring 2007
 A REVIEW OF CALCULUS CONCEPTS FOR JDEP 384H Thoms Shores Deprtment of Mthemtics University of Nebrsk Spring 2007 Contents Rtes of Chnge nd Derivtives 1 Dierentils 4 Are nd Integrls 5 Multivrite Clculus
A REVIEW OF CALCULUS CONCEPTS FOR JDEP 384H Thoms Shores Deprtment of Mthemtics University of Nebrsk Spring 2007 Contents Rtes of Chnge nd Derivtives 1 Dierentils 4 Are nd Integrls 5 Multivrite Clculus
Section 14.3 Arc Length and Curvature
 Section 4.3 Arc Length nd Curvture Clculus on Curves in Spce In this section, we ly the foundtions for describing the movement of n object in spce.. Vector Function Bsics In Clc, formul for rc length in
Section 4.3 Arc Length nd Curvture Clculus on Curves in Spce In this section, we ly the foundtions for describing the movement of n object in spce.. Vector Function Bsics In Clc, formul for rc length in
Topics Covered AP Calculus AB
 Topics Covered AP Clculus AB ) Elementry Functions ) Properties of Functions i) A function f is defined s set of ll ordered pirs (, y), such tht for ech element, there corresponds ectly one element y.
Topics Covered AP Clculus AB ) Elementry Functions ) Properties of Functions i) A function f is defined s set of ll ordered pirs (, y), such tht for ech element, there corresponds ectly one element y.
x = b a N. (13-1) The set of points used to subdivide the range [a, b] (see Fig. 13.1) is
![x = b a N. (13-1) The set of points used to subdivide the range [a, b] (see Fig. 13.1) is](/thumbs/85/92368455.jpg "x = b a N. (13-1) The set of points used to subdivide the range [a, b] (see Fig. 13.1) is") Jnury 28, 2002 13. The Integrl The concept of integrtion, nd the motivtion for developing this concept, were described in the previous chpter. Now we must define the integrl, crefully nd completely. According
Jnury 28, 2002 13. The Integrl The concept of integrtion, nd the motivtion for developing this concept, were described in the previous chpter. Now we must define the integrl, crefully nd completely. According
CAPACITORS AND DIELECTRICS
 Importnt Definitions nd Units Cpcitnce: CAPACITORS AND DIELECTRICS The property of system of electricl conductors nd insultors which enbles it to store electric chrge when potentil difference exists between
Importnt Definitions nd Units Cpcitnce: CAPACITORS AND DIELECTRICS The property of system of electricl conductors nd insultors which enbles it to store electric chrge when potentil difference exists between
Lecture 13 - Linking E, ϕ, and ρ
 Lecture 13 - Linking E, ϕ, nd ρ A Puzzle... Inner-Surfce Chrge Density A positive point chrge q is locted off-center inside neutrl conducting sphericl shell. We know from Guss s lw tht the totl chrge on
Lecture 13 - Linking E, ϕ, nd ρ A Puzzle... Inner-Surfce Chrge Density A positive point chrge q is locted off-center inside neutrl conducting sphericl shell. We know from Guss s lw tht the totl chrge on
Prof. Anchordoqui. Problems set # 4 Physics 169 March 3, 2015
 Prof. Anchordoui Problems set # 4 Physics 169 Mrch 3, 15 1. (i) Eight eul chrges re locted t corners of cube of side s, s shown in Fig. 1. Find electric potentil t one corner, tking zero potentil to be
Prof. Anchordoui Problems set # 4 Physics 169 Mrch 3, 15 1. (i) Eight eul chrges re locted t corners of cube of side s, s shown in Fig. 1. Find electric potentil t one corner, tking zero potentil to be
Polynomials and Division Theory
 Higher Checklist (Unit ) Higher Checklist (Unit ) Polynomils nd Division Theory Skill Achieved? Know tht polynomil (expression) is of the form: n x + n x n + n x n + + n x + x + 0 where the i R re the
Higher Checklist (Unit ) Higher Checklist (Unit ) Polynomils nd Division Theory Skill Achieved? Know tht polynomil (expression) is of the form: n x + n x n + n x n + + n x + x + 0 where the i R re the
- 5 - TEST 2. This test is on the final sections of this session's syllabus and. should be attempted by all students.
 - 5 - TEST 2 This test is on the finl sections of this session's syllbus nd should be ttempted by ll students. Anything written here will not be mrked. - 6 - QUESTION 1 [Mrks 22] A thin non-conducting
- 5 - TEST 2 This test is on the finl sections of this session's syllbus nd should be ttempted by ll students. Anything written here will not be mrked. - 6 - QUESTION 1 [Mrks 22] A thin non-conducting
Curves. Differential Geometry Lia Vas
 Differentil Geometry Li Vs Curves Differentil Geometry Introduction. Differentil geometry is mthemticl discipline tht uses methods of multivrible clculus nd liner lgebr to study problems in geometry. In
Differentil Geometry Li Vs Curves Differentil Geometry Introduction. Differentil geometry is mthemticl discipline tht uses methods of multivrible clculus nd liner lgebr to study problems in geometry. In
A. Limits - L Hopital s Rule ( ) How to find it: Try and find limits by traditional methods (plugging in). If you get 0 0 or!!, apply C.! 1 6 C.
 How to find it: Try and find limits by traditional methods (plugging in). If you get 0 0 or!!, apply C.! 1 6 C.") A. Limits - L Hopitl s Rule Wht you re finding: L Hopitl s Rule is used to find limits of the form f ( x) lim where lim f x x! c g x ( ) = or lim f ( x) = limg( x) = ". ( ) x! c limg( x) = 0 x! c x! c
A. Limits - L Hopitl s Rule Wht you re finding: L Hopitl s Rule is used to find limits of the form f ( x) lim where lim f x x! c g x ( ) = or lim f ( x) = limg( x) = ". ( ) x! c limg( x) = 0 x! c x! c
Goals: Determine how to calculate the area described by a function. Define the definite integral. Explore the relationship between the definite
 Unit #8 : The Integrl Gols: Determine how to clculte the re described by function. Define the definite integrl. Eplore the reltionship between the definite integrl nd re. Eplore wys to estimte the definite
Unit #8 : The Integrl Gols: Determine how to clculte the re described by function. Define the definite integrl. Eplore the reltionship between the definite integrl nd re. Eplore wys to estimte the definite
Dynamics: Newton s Laws of Motion
 Lecture 7 Chpter 4 Physics I 09.25.2013 Dynmics: Newton s Lws of Motion Solving Problems using Newton s lws Course website: http://fculty.uml.edu/andriy_dnylov/teching/physicsi Lecture Cpture: http://echo360.uml.edu/dnylov2013/physics1fll.html
Lecture 7 Chpter 4 Physics I 09.25.2013 Dynmics: Newton s Lws of Motion Solving Problems using Newton s lws Course website: http://fculty.uml.edu/andriy_dnylov/teching/physicsi Lecture Cpture: http://echo360.uml.edu/dnylov2013/physics1fll.html
Thomas Whitham Sixth Form
 Thoms Whithm Sith Form Pure Mthemtics Unit C Alger Trigonometry Geometry Clculus Vectors Trigonometry Compound ngle formule sin sin cos cos Pge A B sin Acos B cos Asin B A B sin Acos B cos Asin B A B cos
Thoms Whithm Sith Form Pure Mthemtics Unit C Alger Trigonometry Geometry Clculus Vectors Trigonometry Compound ngle formule sin sin cos cos Pge A B sin Acos B cos Asin B A B sin Acos B cos Asin B A B cos
Magnetic forces on a moving charge. EE Lecture 26. Lorentz Force Law and forces on currents. Laws of magnetostatics
 Mgnetic forces on moving chrge o fr we ve studied electric forces between chrges t rest, nd the currents tht cn result in conducting medium 1. Mgnetic forces on chrge 2. Lws of mgnetosttics 3. Mgnetic
Mgnetic forces on moving chrge o fr we ve studied electric forces between chrges t rest, nd the currents tht cn result in conducting medium 1. Mgnetic forces on chrge 2. Lws of mgnetosttics 3. Mgnetic
Centre of Mass, Moments, Torque
 Centre of ss, oments, Torque Centre of ss If you support body t its center of mss (in uniform grvittionl field) it blnces perfectly. Tht s the definition of the center of mss of the body. If the body consists
Centre of ss, oments, Torque Centre of ss If you support body t its center of mss (in uniform grvittionl field) it blnces perfectly. Tht s the definition of the center of mss of the body. If the body consists
Definition of Continuity: The function f(x) is continuous at x = a if f(a) exists and lim
 is continuous at x = a if f(a) exists and lim") Mth 9 Course Summry/Study Guide Fll, 2005 [1] Limits Definition of Limit: We sy tht L is the limit of f(x) s x pproches if f(x) gets closer nd closer to L s x gets closer nd closer to. We write lim f(x)
Mth 9 Course Summry/Study Guide Fll, 2005 [1] Limits Definition of Limit: We sy tht L is the limit of f(x) s x pproches if f(x) gets closer nd closer to L s x gets closer nd closer to. We write lim f(x)
1 Bending of a beam with a rectangular section
 1 Bending of bem with rectngulr section x3 Episseur b M x 2 x x 1 2h M Figure 1 : Geometry of the bem nd pplied lod The bem in figure 1 hs rectngur section (thickness 2h, width b. The pplied lod is pure
1 Bending of bem with rectngulr section x3 Episseur b M x 2 x x 1 2h M Figure 1 : Geometry of the bem nd pplied lod The bem in figure 1 hs rectngur section (thickness 2h, width b. The pplied lod is pure
7.1 Integral as Net Change and 7.2 Areas in the Plane Calculus
 7.1 Integrl s Net Chnge nd 7. Ares in the Plne Clculus 7.1 INTEGRAL AS NET CHANGE Notecrds from 7.1: Displcement vs Totl Distnce, Integrl s Net Chnge We hve lredy seen how the position of n oject cn e
7.1 Integrl s Net Chnge nd 7. Ares in the Plne Clculus 7.1 INTEGRAL AS NET CHANGE Notecrds from 7.1: Displcement vs Totl Distnce, Integrl s Net Chnge We hve lredy seen how the position of n oject cn e
Chapter 2. Constraints, Lagrange s equations
 Chpter Constrints, Lgrnge s equtions Section Constrints The position of the prticle or system follows certin rules due to constrints: Holonomic constrint: f (r. r,... r n, t) = 0 Constrints tht re not
Chpter Constrints, Lgrnge s equtions Section Constrints The position of the prticle or system follows certin rules due to constrints: Holonomic constrint: f (r. r,... r n, t) = 0 Constrints tht re not
Properties of Integrals, Indefinite Integrals. Goals: Definition of the Definite Integral Integral Calculations using Antiderivatives
 Block #6: Properties of Integrls, Indefinite Integrls Gols: Definition of the Definite Integrl Integrl Clcultions using Antiderivtives Properties of Integrls The Indefinite Integrl 1 Riemnn Sums - 1 Riemnn
Block #6: Properties of Integrls, Indefinite Integrls Gols: Definition of the Definite Integrl Integrl Clcultions using Antiderivtives Properties of Integrls The Indefinite Integrl 1 Riemnn Sums - 1 Riemnn
KINETICS OF RIGID BODIES PROBLEMS
 KINETICS OF RIID ODIES PROLEMS PROLEMS 1. The 6 kg frme C nd the 4 kg uniform slender br of length l slide with negligible friction long the fied horizontl br under the ction of the 80 N force. Clculte
KINETICS OF RIID ODIES PROLEMS PROLEMS 1. The 6 kg frme C nd the 4 kg uniform slender br of length l slide with negligible friction long the fied horizontl br under the ction of the 80 N force. Clculte
Math 0230 Calculus 2 Lectures
 Mth Clculus Lectures Chpter 7 Applictions of Integrtion Numertion of sections corresponds to the text Jmes Stewrt, Essentil Clculus, Erly Trnscendentls, Second edition. Section 7. Ares Between Curves Two
Mth Clculus Lectures Chpter 7 Applictions of Integrtion Numertion of sections corresponds to the text Jmes Stewrt, Essentil Clculus, Erly Trnscendentls, Second edition. Section 7. Ares Between Curves Two
Time : 3 hours 03 - Mathematics - March 2007 Marks : 100 Pg - 1 S E CT I O N - A
 Time : hours 0 - Mthemtics - Mrch 007 Mrks : 100 Pg - 1 Instructions : 1. Answer ll questions.. Write your nswers ccording to the instructions given below with the questions.. Begin ech section on new
Time : hours 0 - Mthemtics - Mrch 007 Mrks : 100 Pg - 1 Instructions : 1. Answer ll questions.. Write your nswers ccording to the instructions given below with the questions.. Begin ech section on new
Best Approximation in the 2-norm
 Jim Lmbers MAT 77 Fll Semester 1-11 Lecture 1 Notes These notes correspond to Sections 9. nd 9.3 in the text. Best Approximtion in the -norm Suppose tht we wish to obtin function f n (x) tht is liner combintion
Jim Lmbers MAT 77 Fll Semester 1-11 Lecture 1 Notes These notes correspond to Sections 9. nd 9.3 in the text. Best Approximtion in the -norm Suppose tht we wish to obtin function f n (x) tht is liner combintion
Kirchhoff and Mindlin Plates
 Kirchhoff nd Mindlin Pltes A plte significntly longer in two directions compred with the third, nd it crries lod perpendiculr to tht plne. The theory for pltes cn be regrded s n extension of bem theory,
Kirchhoff nd Mindlin Pltes A plte significntly longer in two directions compred with the third, nd it crries lod perpendiculr to tht plne. The theory for pltes cn be regrded s n extension of bem theory,
A. Limits - L Hopital s Rule. x c. x c. f x. g x. x c 0 6 = 1 6. D. -1 E. nonexistent. ln ( x 1 ) 1 x 2 1. ( x 2 1) 2. 2x x 1.
 1 x 2 1. ( x 2 1) 2. 2x x 1.") A. Limits - L Hopitl s Rule Wht you re finding: L Hopitl s Rule is used to find limits of the form f ( ) lim where lim f or lim f limg. c g = c limg( ) = c = c = c How to find it: Try nd find limits by
A. Limits - L Hopitl s Rule Wht you re finding: L Hopitl s Rule is used to find limits of the form f ( ) lim where lim f or lim f limg. c g = c limg( ) = c = c = c How to find it: Try nd find limits by
4. Calculus of Variations
 4. Clculus of Vritions Introduction - Typicl Problems The clculus of vritions generlises the theory of mxim nd minim. Exmple (): Shortest distnce between two points. On given surfce (e.g. plne), nd the
4. Clculus of Vritions Introduction - Typicl Problems The clculus of vritions generlises the theory of mxim nd minim. Exmple (): Shortest distnce between two points. On given surfce (e.g. plne), nd the
3. Vectors. Home Page. Title Page. Page 2 of 37. Go Back. Full Screen. Close. Quit
 Rutgers University Deprtment of Physics & Astronomy 01:750:271 Honors Physics I Lecture 3 Pge 1 of 37 3. Vectors Gols: To define vector components nd dd vectors. To introduce nd mnipulte unit vectors.
Rutgers University Deprtment of Physics & Astronomy 01:750:271 Honors Physics I Lecture 3 Pge 1 of 37 3. Vectors Gols: To define vector components nd dd vectors. To introduce nd mnipulte unit vectors.
Simple Harmonic Motion I Sem
 Simple Hrmonic Motion I Sem Sllus: Differentil eqution of liner SHM. Energ of prticle, potentil energ nd kinetic energ (derivtion), Composition of two rectngulr SHM s hving sme periods, Lissjous figures.
Simple Hrmonic Motion I Sem Sllus: Differentil eqution of liner SHM. Energ of prticle, potentil energ nd kinetic energ (derivtion), Composition of two rectngulr SHM s hving sme periods, Lissjous figures.
7.1 Integral as Net Change Calculus. What is the total distance traveled? What is the total displacement?
 7.1 Integrl s Net Chnge Clculus 7.1 INTEGRAL AS NET CHANGE Distnce versus Displcement We hve lredy seen how the position of n oject cn e found y finding the integrl of the velocity function. The chnge
7.1 Integrl s Net Chnge Clculus 7.1 INTEGRAL AS NET CHANGE Distnce versus Displcement We hve lredy seen how the position of n oject cn e found y finding the integrl of the velocity function. The chnge
Conservation Law. Chapter Goal. 5.2 Theory
 Chpter 5 Conservtion Lw 5.1 Gol Our long term gol is to understnd how mny mthemticl models re derived. We study how certin quntity chnges with time in given region (sptil domin). We first derive the very
Chpter 5 Conservtion Lw 5.1 Gol Our long term gol is to understnd how mny mthemticl models re derived. We study how certin quntity chnges with time in given region (sptil domin). We first derive the very
Calculus of Variations
 Clculus of Vritions Com S 477/577 Notes) Yn-Bin Ji Dec 4, 2017 1 Introduction A functionl ssigns rel number to ech function or curve) in some clss. One might sy tht functionl is function of nother function
Clculus of Vritions Com S 477/577 Notes) Yn-Bin Ji Dec 4, 2017 1 Introduction A functionl ssigns rel number to ech function or curve) in some clss. One might sy tht functionl is function of nother function
Definite integral. Mathematics FRDIS MENDELU
 Definite integrl Mthemtics FRDIS MENDELU Simon Fišnrová Brno 1 Motivtion - re under curve Suppose, for simplicity, tht y = f(x) is nonnegtive nd continuous function defined on [, b]. Wht is the re of the
Definite integrl Mthemtics FRDIS MENDELU Simon Fišnrová Brno 1 Motivtion - re under curve Suppose, for simplicity, tht y = f(x) is nonnegtive nd continuous function defined on [, b]. Wht is the re of the
Simulation of Eclipsing Binary Star Systems. Abstract
 Simultion of Eclipsing Binry Str Systems Boris Yim 1, Kenny Chn 1, Rphel Hui 1 Wh Yn College Kowloon Diocesn Boys School Abstrct This report briefly introduces the informtion on eclipsing binry str systems.
Simultion of Eclipsing Binry Str Systems Boris Yim 1, Kenny Chn 1, Rphel Hui 1 Wh Yn College Kowloon Diocesn Boys School Abstrct This report briefly introduces the informtion on eclipsing binry str systems.
Linear Inequalities: Each of the following carries five marks each: 1. Solve the system of equations graphically.
 Liner Inequlities: Ech of the following crries five mrks ech:. Solve the system of equtions grphiclly. x + 2y 8, 2x + y 8, x 0, y 0 Solution: Considerx + 2y 8.. () Drw the grph for x + 2y = 8 by line.it
Liner Inequlities: Ech of the following crries five mrks ech:. Solve the system of equtions grphiclly. x + 2y 8, 2x + y 8, x 0, y 0 Solution: Considerx + 2y 8.. () Drw the grph for x + 2y = 8 by line.it
Sample Problems for the Final of Math 121, Fall, 2005
 Smple Problems for the Finl of Mth, Fll, 5 The following is collection of vrious types of smple problems covering sections.8,.,.5, nd.8 6.5 of the text which constitute only prt of the common Mth Finl.
Smple Problems for the Finl of Mth, Fll, 5 The following is collection of vrious types of smple problems covering sections.8,.,.5, nd.8 6.5 of the text which constitute only prt of the common Mth Finl.
First Semester Review Calculus BC
 First Semester Review lculus. Wht is the coordinte of the point of inflection on the grph of Multiple hoice: No lcultor y 3 3 5 4? 5 0 0 3 5 0. The grph of piecewise-liner function f, for 4, is shown below.
First Semester Review lculus. Wht is the coordinte of the point of inflection on the grph of Multiple hoice: No lcultor y 3 3 5 4? 5 0 0 3 5 0. The grph of piecewise-liner function f, for 4, is shown below.
Problem Solving 7: Faraday s Law Solution
 MASSACHUSETTS NSTTUTE OF TECHNOLOGY Deprtment of Physics: 8.02 Prolem Solving 7: Frdy s Lw Solution Ojectives 1. To explore prticulr sitution tht cn led to chnging mgnetic flux through the open surfce
MASSACHUSETTS NSTTUTE OF TECHNOLOGY Deprtment of Physics: 8.02 Prolem Solving 7: Frdy s Lw Solution Ojectives 1. To explore prticulr sitution tht cn led to chnging mgnetic flux through the open surfce
PDE Notes. Paul Carnig. January ODE s vs PDE s 1
 PDE Notes Pul Crnig Jnury 2014 Contents 1 ODE s vs PDE s 1 2 Section 1.2 Het diffusion Eqution 1 2.1 Fourier s w of Het Conduction............................. 2 2.2 Energy Conservtion.....................................
PDE Notes Pul Crnig Jnury 2014 Contents 1 ODE s vs PDE s 1 2 Section 1.2 Het diffusion Eqution 1 2.1 Fourier s w of Het Conduction............................. 2 2.2 Energy Conservtion.....................................
HIGHER SCHOOL CERTIFICATE EXAMINATION MATHEMATICS 3 UNIT (ADDITIONAL) AND 3/4 UNIT (COMMON) Time allowed Two hours (Plus 5 minutes reading time)
 AND 3/4 UNIT (COMMON) Time allowed Two hours (Plus 5 minutes reading time)") HIGHER SCHOOL CERTIFICATE EXAMINATION 998 MATHEMATICS 3 UNIT (ADDITIONAL) AND 3/4 UNIT (COMMON) Time llowed Two hours (Plus 5 minutes reding time) DIRECTIONS TO CANDIDATES Attempt ALL questions ALL questions
HIGHER SCHOOL CERTIFICATE EXAMINATION 998 MATHEMATICS 3 UNIT (ADDITIONAL) AND 3/4 UNIT (COMMON) Time llowed Two hours (Plus 5 minutes reding time) DIRECTIONS TO CANDIDATES Attempt ALL questions ALL questions
Definite integral. Mathematics FRDIS MENDELU. Simona Fišnarová (Mendel University) Definite integral MENDELU 1 / 30
 Definite integral MENDELU 1 / 30") Definite integrl Mthemtics FRDIS MENDELU Simon Fišnrová (Mendel University) Definite integrl MENDELU / Motivtion - re under curve Suppose, for simplicity, tht y = f(x) is nonnegtive nd continuous function
Definite integrl Mthemtics FRDIS MENDELU Simon Fišnrová (Mendel University) Definite integrl MENDELU / Motivtion - re under curve Suppose, for simplicity, tht y = f(x) is nonnegtive nd continuous function
Year 12 Mathematics Extension 2 HSC Trial Examination 2014
 Yer Mthemtics Etension HSC Tril Emintion 04 Generl Instructions. Reding time 5 minutes Working time hours Write using blck or blue pen. Blck pen is preferred. Bord-pproved clcultors my be used A tble of
Yer Mthemtics Etension HSC Tril Emintion 04 Generl Instructions. Reding time 5 minutes Working time hours Write using blck or blue pen. Blck pen is preferred. Bord-pproved clcultors my be used A tble of
200 points 5 Problems on 4 Pages and 20 Multiple Choice/Short Answer Questions on 5 pages 1 hour, 48 minutes
 PHYSICS 132 Smple Finl 200 points 5 Problems on 4 Pges nd 20 Multiple Choice/Short Answer Questions on 5 pges 1 hour, 48 minutes Student Nme: Recittion Instructor (circle one): nme1 nme2 nme3 nme4 Write
PHYSICS 132 Smple Finl 200 points 5 Problems on 4 Pges nd 20 Multiple Choice/Short Answer Questions on 5 pges 1 hour, 48 minutes Student Nme: Recittion Instructor (circle one): nme1 nme2 nme3 nme4 Write
JUST THE MATHS UNIT NUMBER INTEGRATION APPLICATIONS 6 (First moments of an arc) A.J.Hobson
 A.J.Hobson") JUST THE MATHS UNIT NUMBER 13.6 INTEGRATION APPLICATIONS 6 (First moments of n rc) by A.J.Hobson 13.6.1 Introduction 13.6. First moment of n rc bout the y-xis 13.6.3 First moment of n rc bout the x-xis
JUST THE MATHS UNIT NUMBER 13.6 INTEGRATION APPLICATIONS 6 (First moments of n rc) by A.J.Hobson 13.6.1 Introduction 13.6. First moment of n rc bout the y-xis 13.6.3 First moment of n rc bout the x-xis
ragsdale (zdr82) HW2 ditmire (58335) 1
 HW2 ditmire (58335) 1") rgsdle (zdr82) HW2 ditmire (58335) This print-out should hve 22 questions. Multiple-choice questions my continue on the next column or pge find ll choices before nswering. 00 0.0 points A chrge of 8. µc
rgsdle (zdr82) HW2 ditmire (58335) This print-out should hve 22 questions. Multiple-choice questions my continue on the next column or pge find ll choices before nswering. 00 0.0 points A chrge of 8. µc
k ) and directrix x = h p is A focal chord is a line segment which passes through the focus of a parabola and has endpoints on the parabola.
 and directrix x = h p is A focal chord is a line segment which passes through the focus of a parabola and has endpoints on the parabola.") Stndrd Eqution of Prol with vertex ( h, k ) nd directrix y = k p is ( x h) p ( y k ) = 4. Verticl xis of symmetry Stndrd Eqution of Prol with vertex ( h, k ) nd directrix x = h p is ( y k ) p( x h) = 4.
Stndrd Eqution of Prol with vertex ( h, k ) nd directrix y = k p is ( x h) p ( y k ) = 4. Verticl xis of symmetry Stndrd Eqution of Prol with vertex ( h, k ) nd directrix x = h p is ( y k ) p( x h) = 4.
Chapter 2. Vectors. 2.1 Vectors Scalars and Vectors
 Chpter 2 Vectors 2.1 Vectors 2.1.1 Sclrs nd Vectors A vector is quntity hving both mgnitude nd direction. Emples of vector quntities re velocity, force nd position. One cn represent vector in n-dimensionl
Chpter 2 Vectors 2.1 Vectors 2.1.1 Sclrs nd Vectors A vector is quntity hving both mgnitude nd direction. Emples of vector quntities re velocity, force nd position. One cn represent vector in n-dimensionl
5.7 Improper Integrals
 458 pplictions of definite integrls 5.7 Improper Integrls In Section 5.4, we computed the work required to lift pylod of mss m from the surfce of moon of mss nd rdius R to height H bove the surfce of the
458 pplictions of definite integrls 5.7 Improper Integrls In Section 5.4, we computed the work required to lift pylod of mss m from the surfce of moon of mss nd rdius R to height H bove the surfce of the
CONIC SECTIONS. Chapter 11
 CONIC SECTIONS Chpter. Overview.. Sections of cone Let l e fied verticl line nd m e nother line intersecting it t fied point V nd inclined to it t n ngle α (Fig..). Fig.. Suppose we rotte the line m round
CONIC SECTIONS Chpter. Overview.. Sections of cone Let l e fied verticl line nd m e nother line intersecting it t fied point V nd inclined to it t n ngle α (Fig..). Fig.. Suppose we rotte the line m round