LANMARK UNIVERSITY OMU-ARAN, KWARA STATE DEPARTMENT OF MECHANICAL ENGINEERING COURSE: MECHANICS OF MACHINE (MCE 322). LECTURER: ENGR.
|
|
|
- Harvey Reynolds
- 5 years ago
- Views:
Transcription
1 LANMARK UNIVERSITY OMU-ARAN, KWARA STATE DEPARTMENT OF MECHANICAL ENGINEERING COURSE: MECHANICS OF MACHINE (MCE 322). LECTURER: ENGR. IBIKUNLE ROTIMI ADEDAYO SIMPLE HARMONIC MOTION. Introduction Consider a particle moving round the circumference of a circle in an anticlockwise direction, with a constant angular velocity, as shown in Fig.1. Let P be the position of the particle at any instant, and N is the projection of P on the diameter XX of the circle. When the point P moves round the circumference of the circle from X to Y, then N moves from X to O. When P moves from Y to X, then N moves from O to X. Similarly when P moves from X to Y, then N moves from X to O and finally when P moves from Y to X, then N moves from O to X. Hence, as P completes one revolution, the point N completes one vibration about the point O. This to and fro motion of N is known as simple harmonic motion (S.H.M.). Fig.1. 1
2 1.2 Velocity and Acceleration of a Particle Moving with S.H.M Let us consider a particle, moving round the circumference of a circle of radius r, with a uniform angular velocity rad/s, as shown in Fig.2. Let P be any position of the particle after t seconds and Ɵ be the angle turned by the particle in t seconds. We know that Ɵ =.t If N is the projection of P on the diameter XX, then displacement of N from its mean position O is, always directed towards the Centre O; so that the motion of N is simple harmonic. x = r.cos Ɵ = r.cos. t... (i) The velocity of N is the component of the velocity of P parallel to XX, i.e. V N v sin Ɵ.r sinɵ r 2 x 2 )... (ii)... v r., and r sinɵ NP (r 2 x 2 ). Fig.2. Velocity and acceleration of particle. In general, a body is said to move or vibrate with simple harmonic motion, if it satisfies the following two conditions 1. Its acceleration is always directed towards the centre, known as point of reference or mean position; 2. Its acceleration is proportional to the distance from that point. Movements of a ship up and down in a vertical plane about transverse axis (called Pitching) and about longitude (called rolling) are in Simple Harmonic Motion. 2


3 1.3 Differential Equation of Simple Harmonic Motion In Fig.2, when t = 0, x = r i.e. when points P and N lie at X, we have from equation (iv), A = r Differentiating equation (iv), = - A..sin.t + B. cos t 3

4 1.4. Terms Used in Simple Harmonic Motion The following terms, commonly used in simple harmonic motion, are important from the subject point of view. 1. Amplitude. It is the maximum displacement of a body from its mean position. In Fig. 2, OX or OX is the amplitude of the particle P. The amplitude is always equal to the radius of the circle. 2. Periodic time. It is the time taken for one complete revolution of the particle. Periodic time, tp = 2 / seconds Notes: 1. In S.I. units, the unit of frequency is hertz (briefly written as Hz) which is equal to one cycle per second. 2. When the particle moves with angular simple harmonic motion, then the periodic time tp = 2 and frequency, n = HZ = 2 sec. Example 1.1. The piston of a steam engine moves with simple harmonic motion. The crank rotates at 120 r.p.m. with a stroke of 2 metres. Find the velocity and acceleration of the piston, when it is at a distance of 0.75 metre from the centre. 4
5 Solution. Given: N =120 r.p.m. or = 2 120/60 = 4 rad/s; 2r = 2 m or r = 1 m; x = 0.75 m Velocity of the piston We know that velocity of the piston, V= r 2 x 2 = 4 1 (0.75) 2 = 8.31 m/s. Acceleration of the piston We also know that acceleration of the piston, a =.x = (4 ) = m/s 2 Ans. Example 1.2. A point moves with simple harmonic motion. When this point is 0.75metre from the mid path, its velocity is 11 m/s and when 2 metres from the centre of its path its velocity is 3 m/s. Find its angular velocity, periodic time and its maximum acceleration. Squaring both sides, = 121 r = 9r or 112 r 2 = r2 = / 112 = or r = 2.07 m Substituting the value of r in equation (i), 5
6 6
7 1.5. Simple Pendulum A simple pendulum, in its simplest form, consists of heavy bob suspended at the end of a light inextensible and flexible string. The other end of the string is fixed at O, as shown in Fig. 3. Let L = Length of the string, m = Mass of the bob in kg, W = Weight of the bob in newtons = m.g, and Ɵ = Angle through which the string is displaced. Fig.3. Simple pendulum. When the bob is at A, the pendulum is in equilibrium position. If the bob is brought to B or C and released, it will start oscillating between the two positions B and C, with A as the mean position. It has been observed that if the angle Ɵ is very small (less than 4 ), the bob will have simple harmonic motion. Now, the couple tending to restore the bob to the equilibrium position or restoring torque, T = m.g sin Ɵ L Since angle Ɵ is very small, therefore sin Ɵ = Ɵ radians. T = m.g.l.ɵ We know that the mass moment of inertia of the bob about an axis through the point of suspension, I = mass (length) 2 = m.l 2 Angular acceleration of the string, = = = or = 7
8 1.6. Laws of Simple Pendulum The following laws of a simple pendulum are important from the subject point of view: 1. Law of isochronism. It states, The time period (t p ) of a simple pendulum does not depend upon its amplitude of vibration and remains the same, provided the angular amplitude (Ɵ) does not exceed Law of mass. It states, The time period (t p ) of a simple pendulum does not depend upon the mass of the body suspended at the free end of the string. 3. Law of length. It states, The time period (t p ) of a simple pendulum is directly proportional to L, where L is the length of the string. 4. Law of gravity. It states, The time period (t p ) of a simple pendulum is inversely proportional to g, where g is the acceleration due to gravity. Note: The above laws of a simple pendulum are true from the equation of the periodic time i.e. t p = 2 8
9 1.7. Closely-coiled Helical Spring Consider a closely-coiled helical spring, whose upper end is fixed, as shown in Fig. 4. Let a body be attached to the lower end. Let A A be the equilibrium position of the spring, after the mass is attached. If the spring is stretched up to BB and then released, the mass will move up and down with simple harmonic motion. Let m = Mass of the body in kg, W = Weight of the body in newtons = m.g, x = Displacement of the load below equilibrium position in metres, s = Stiffness of the spring in N/m i.e. restoring force per unit displacement from the equilibrium position, a = Acceleration of the body in m/s 2. We know that the deflection of the spring, =... (i) Then disturbing force = m.a And restoring force = s.x... (ii) Equating equations (i) and (ii), m.a = s.x* or The differential equation for the motion of the spring is m = - s x or =. (Here 2 = ) The ve sign indicates that the restoring force s.x is opposite to the direction of disturbing force. When we stretch a spring with a mass on the end and let it go, the mass will oscillate back and forth (if there is no friction). This oscillation is called S.H.M. 9

10 Fig. 4 Closely - coiled helical spring. Example 1.3. A helical spring, of negligible mass, and which is found to extend 0.25 mm under a mass of 1.5 kg, is made to support a mass of 60 kg. The spring and the mass system is displaced vertically through 12.5 mm and released. Determine the frequency of natural vibration of the system. Find also the velocity of the mass, when it is 5 mm below its rest position. Solution. Given: m = 60 kg ; r = 12.5 mm = m ; x = 5 mm = msince a mass of 1.5 kg extends the spring by 0.25 mm, therefore a mass of 60 kg will extend the spring by an amount, 10
11 1.8. Compound Pendulum When a rigid body is suspended vertically, and it oscillates with a small amplitude under the action of the force of gravity, the body is known as compound pendulum, as shown in Fig.5. Let m = Mass of the pendulum in kg, W = Weight of the pendulum in newtons = m.g, * We know that periodic time, t p = or = = 2 n = = 31.3 rad/s ( n = 1/tp) Fig. 5 k G = Radius of gyration about an axis through the centre of gravity G and perpendicular to the plane of motion, and h = Distance of point of suspension O from the centre of gravity G of the body. If the pendulum is given a small angular displacement Ɵ, then the couple tending to restore the pendulum to the equilibrium position OA, T = mg sin Ɵ h = m g h sin Ɵ Since Ɵ is very small, therefore substituting sin Ɵ = Ɵ radians, we get T = m g h Ɵ Now, the mass moment of inertia about the axis of suspension O, 11
12 Notes: 1. Comparing this equation with equation (ii) of simple pendulum, we see that the equivalent length of a simple pendulum, which gives the same frequency as compound pendulum, is L= 2. Since the equivalent length of simple pendulum (L) depends upon the distance between the point of suspension and the centre of gravity (G), therefore L can be changed by changing the position of point of suspension. This will, obviously, change the periodic time of a compound pendulum. The periodic time will be minimum if L is minimum. For L to be minimum, the differentiation of L with respect to h must be equal to zero, i.e. = 0 or = ( ) = 0 or = h Thus the periodic time of a compound pendulum is minimum when the distance between the point of suspension and the centre of gravity is equal to the radius of gyration of the body about its centre of gravity. Minimum periodic time of a compound pendulum, = 2... [Substituting h = k G in equation (i)] 12
13 Example 4.4. A uniform thin rod, as shown in Fig. 4.7, has a mass of 1 kg and carries a concentrated mass of 2.5 kg at B. The rod is hinged at A and is maintained in the horizontal position by a spring of stiffness 1.8 kn/m at C. Find the frequency of oscillation, neglecting the effect of the mass of the spring. Fig. 6. n = = 2.01 HZ. 13
14 Example 4.5. A small flywheel of mass 85 kg is suspended in a vertical plane as a compound pendulum. The distance of centre of gravity from the knife edge support is 100 mm and the flywheel makes 100 oscillations in 145 seconds. Find the moment of inertia of the flywheel through the centre of gravity. Solution. Given: m = 85 kg; h = 100 mm = 0.1 m Since the flywheel makes 100 oscillations in 145 seconds, therefore frequency of oscillation, n = 100/145 = 0.69 Hz Let L = Equivalent length of simple pendulum, and k G = Radius of gyration through C.G. We know that frequency of oscillation (n), and moment of inertia of the flywheel through the centre of gravity, I = m.k 2 G = = 3.6 kg-m 2 Ans. Example 4.9. A small connecting rod of mass 1.5 kg is suspended in a horizontal plane by two wires 1.25 m long. The wires are attached to the rod at points 120 mm on either side of the centre of gravity. If the rod makes 20 oscillations in 40 seconds, find the radius of gyration and the mass moment of inertia of the rod about a vertical axis through the centre of gravity. Solution. Given: m = 1.5 kg; l = 1.25 m; x = y = 120 mm = 0.12 m Since the rod makes 20 oscillations in 40 s, therefore frequency of oscillation, n = 20/40 = 0.5 Hz Radius of gyration of the connecting rod Let k G = Radius of gyration of the connecting rod. 14
15 We know that frequency of oscillation (n), 0.5 = = = = /0.5 = 0.107m = 107mm. Mass moment of inertia of the connecting rod We know that mass moment of inertia, I = m (k G ) 2 = 1.5 (0.107) 2 = kg-m2 Ans. TUTORIALS A particle, moving with simple harmonic motion, performs 10 complete oscillations per minute and its speed, when at a distance of 80 mm from the centre of oscillation is 3/5 of the maximum speed. Find the amplitude, the maximum acceleration and the speed of the particle, when it is 60 mm from the centre of the oscillation. [Ans. 100 mm; mm/s2; mm/s] 2. A piston, moving with a simple harmonic motion, has a velocity of 8 m/s, when it is 1 metre from the centre position and a velocity of 4 m/s, when it is 2 metres from the centre. Find: 1. Amplitude, 2.Periodic time, 3. Maximum velocity, and 4. Maximum acceleration. [Ans m; s; 8.94 m/s; m/s2] 3. The plunger of a reciprocating pump is driven by a crank of radius 250 mm rotating at 12.5 rad/s. Assuming simple harmonic motion, determine the maximum velocity and maximum acceleration of the plunger. [Ans m/s; 39.1 m/s2] 4. A part of a machine of mass 4.54 kg has a reciprocating motion which is simple harmonic in character. It makes 200 complete oscillations in 1 minute. Find: 1. the accelerating force upon it and its velocity when it is 75 mm, from mid-stroke; 2. the maximum accelerating force, and 3. the maximum velocity if its total stroke is 225 mm i.e. if the amplitude of vibration is mm. [Ans N ; 1.76 m/s ; 224 N ; 2.36 m/s] 5. A helical spring of negligible mass is required to support a mass of 50 kg. The stiffness of the spring is 60 kn/m. The spring and the mass system is displaced vertically by 20 mm below the equilibrium position and then released. Find: 1. the frequency of natural vibration of the system; 2. the velocity and acceleration of the mass when it is 10 mm below the rest position. [Ans. 5.5 Hz; 0.6 m/s ; m/s2] 6. A spring of stiffness 2 kn/m is suspended vertically and two equal masses of 4 kg each are attached to the lower end. One of these masses is suddenly removed and the system oscillates. 15
16 Determine: 1. The amplitude of vibration, 2. the frequency of vibration, 3. the velocity and acceleration of the mass when passing through half amplitude position, and 4. kinetic energy of the vibration in joules. [Ans m; 3.56 Hz; 0.38 m/s, 4.9 m/s 2 ; J] 7. A vertical helical spring having a stiffness of 1540 N/m is clamped at its upper end and carries a mass of 20 kg attached to the lower end. The mass is displaced vertically through a distance of 120 mm and released. Find: 1. Frequency of oscillation; 2. Maximum velocity reached; 3. Maximum acceleration; and 4. Maximum value of the inertia force on the mass. [Ans Hz; m/s; 9.24 m/s 2 ; N] 8. A small flywheel having mass 90 kg is suspended in a vertical plane as a compound pendulum. The distance of centre of gravity from the knife edge support is 250 mm and the flywheel makes 50 oscillations in 64 seconds. Find the moment of inertia of the flywheel about an axis through the centre of gravity. [Ans. 3.6 kgm2]. 2.0 VIBRATION Introduction When elastic bodies such as a spring, a beam and a shaft are displaced from the equilibrium position by the application of external forces, and then released, they execute a vibratory motion. This is due to the reason that, when a body is displaced, the internal forces in the form of elastic or strain energy are present in the body. At release, these forces bring the body to its original position. When the body reaches the equilibrium position, the whole of the elastic or strain energy is converted into kinetic energy due to which the body continues to move in the opposite direction. The whole of the kinetic energy is again converted into strain energy due to which the body again returns to the equilibrium position. In this way, the vibratory motion is repeated indefinitely Terms Used in Vibratory Motion The following terms are commonly used in connection with the vibratory motions: 1. Period of vibration or time period. It is the time interval after which the motion is repeated itself. The period of vibration is usually expressed in seconds. 2. Cycle. It is the motion completed during one time period. 16
17 3. Frequency. It is the number of cycles described in one second. In S.I. units, the frequency is expressed in hertz (briefly written as Hz) which is equal to one cycle per second Types of Vibratory Motion The following types of vibratory motion are important from the subject point of view: 1. Free or natural vibrations. When no external force acts on the body, after giving it an initial displacement, then the body is said to be under free or natural vibrations. The frequency of the free vibrations is called free or natural frequency. 2. Forced vibrations. When the body vibrates under the influence of external force, then the body is said to be under forced vibrations. The external force applied to the body is a periodic disturbing force created by unbalance. The vibrations have the same frequency as the applied force. Note: When the frequency of the external force is same as that of the natural vibrations, resonance takes place. 3. Damped vibrations. When there is a reduction in amplitude over every cycle of vibration, the motion is said to be damped vibration. This is due to the fact that a certain amount of energy possessed by the vibrating system is always dissipated in overcoming frictional resistances to the motion Types of Free Vibrations The following three types of free vibrations are important from the subject point of view: 1. Longitudinal vibrations, 2. Transverse vibrations, and 3. Torsional vibrations. Consider a weightless constraint (spring or shaft) whose one end is fixed and the other end carrying a heavy disc, as shown in Fig.7. This system may execute one of the three above mentioned types of vibrations. 17
18 2. 1. Longitudinal vibrations. When the particles of the shaft or disc moves parallel to the axis of the shaft, as shown in Fig.7. (a), then the vibrations are known as longitudinal vibrations. In this case, the shaft is elongated and shortened alternately and thus the tensile and compressive stresses are induced alternately in the shaft. 2. Transverse vibrations. When the particles of the shaft or disc move approximately perpendicular to the axis of the shaft, as shown in Fig.7. (b), then the vibrations are known as transverse vibrations. In this case, the shaft is straight and bent alternately and bending stresses are induced in the shaft. 3. Torsional vibrations*. When the particles of the shaft or disc move in a circle about the axis of the shaft, as shown in Fig.7 (c), then the vibrations are known as torsional vibrations. In this case, the shaft is twisted and untwisted alternately and the torsional shear stresses are induced in the shaft. Note: If the limit of proportionality (i.e. stress proportional to strain) is not exceeded in the three types of vibrations, then the restoring force in longitudinal and transverse vibrations or the restoring couple in torsional vibrations which is exerted on the disc by the shaft (due to the stiffness of the shaft) is directly proportional to the displacement of the disc from its equilibrium or mean position. Hence it follows that the acceleration towards the equilibrium position is directly proportional to the displacement from that position and the vibration is, therefore, simple harmonic. 18
19 2.5. Natural Frequency of Free Longitudinal Vibrations The natural frequency of the free longitudinal vibrations may be determined by the following three methods: 1. Equilibrium Method Consider a constraint (i.e. spring) of negligible mass in an unstrained position, as shown in Fig. 8. (a). Let s = Stiffness of the constraint. It is the force required to produce unit displacement in the direction of vibration. It is usually expressed in N/m. m = Mass of the body suspended from the constraint in kg, W = Weight of the body in newtons = m.g, = Static deflection of the spring in metres due to weight W newtons, and x = Displacement given to the body by the external force, in metres. Fig.8. Natural frequency of free longitudinal vibrations. In the equilibrium position, as shown in Fig.8. (b), the gravitational pull W = m.g, is balanced by a force of spring, such that W = S.. Since the mass is now displaced from its equilibrium position by a distance x, as shown in Fig. 8 (c), and is then released, therefore after time t, 19
20 Time period, t p = = 2 20
21 2. Energy method We know that the kinetic energy is due to the motion of the body and the potential energy is with respect to a certain datum position which is equal to the amount of work required to move the body from the datum position. In the case of vibrations, the datum position is the mean or equilibrium position at which the potential energy of the body or the system is zero. In the free vibrations, no energy is transferred to the system or from the system. Therefore the summation of kinetic energy and potential energy must be a constant quantity which is same at all the times. In other words, We know that kinetic energy, K.E. = I/2.m.( ) 2 21
22 3. Rayleigh s method In this method, the maximum kinetic energy at the mean position is equal to the maximum potential energy (or strain energy) at the extreme position. Assuming the motion executed by the vibration to be simple harmonic, then x X sin.t... (i) where x = Displacement of the body from the mean position after time t seconds, and X = Maximum displacement from mean position to extreme position. Now, differentiating equation (i), we have and natural frequency, f n = = = Note: In all the above expressions, is known as natural circular frequency and is generally denoted by n. 22

23 2.6. Natural Frequency of Free Transverse Vibrations Consider a shaft of negligible mass, whose one end is fixed and the other end carries a body of weight W, as shown in Fig.9. Let s = Stiffness of shaft, = Static deflection due to weight of the body, x = Displacement of body from mean position after time t. m = Mass of body = W/g Restoring force = s.x and accelerating force = m... (ii) Equating equations (i) and (ii), the equation of motion becomes... (i) Fig. 9. Natural frequency of free transverse vibrations. 23
24 Example 2.1. A cantilever shaft 50 mm diameter and 300 mm long has a disc of mass 100 kg at its free end. The Young's modulus for the shaft material is 200 GN/m 2. Determine the frequency of longitudinal and transverse vibrations of the shaft. Solution. Given: d = 50 mm = 0.05 m; l = 300 mm = 0.3 m; m = 100 kg; E = 200 GN/m 2 = N/m 2 We know that cross-sectional area of the shaft, Solution. Given: d = 50 mm = 0.05 m; l = 300 mm = 0.03 m ; m = 100 kg ; E = 200 GN/m2 = N/m2 We know that cross-sectional area of the shaft, 24
25 2.7. Effect of Inertia of the Constraint in Longitudinal and Transverse Vibrations In deriving the expressions for natural frequency of longitudinal and transverse vibrations, we have neglected the inertia of the constraint i.e. shaft. We shall now discuss the effect of the inertia of the constraint, as below: 1. Longitudinal vibration Consider the constraint whose one end is fixed and other end is free as shown in Fig.10. Let m 1 = Mass of the constraint per unit length, l = Length of the constraint, m C = Total mass of the constraint = m 1.l, and v = Longitudinal velocity of the free end. 25

26 Fig. 10. Effect of inertia of the constraint in longitudinal vibrations. Consider a small element of the constraint at a distance x from the fixed end and of Length x. Velocity of the small element 26

27 2. Transverse vibration Consider a constraint whose one end is fixed and the other end is free as shown in Fig.11. Let m 1 = Mass of constraint per unit length, l = Length of the constraint, m C = Total mass of the constraint = m 1.l, and v = Transverse velocity of the free end. Consider a small element of the constraint at a distance x from the fixed end and of length x. The velocity of this element is Fig.11. Effect of inertia of the constraint in transverse vibrations. 27
28 28
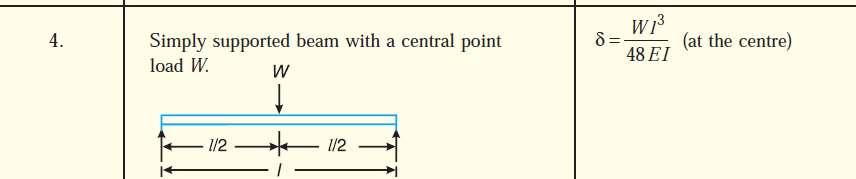
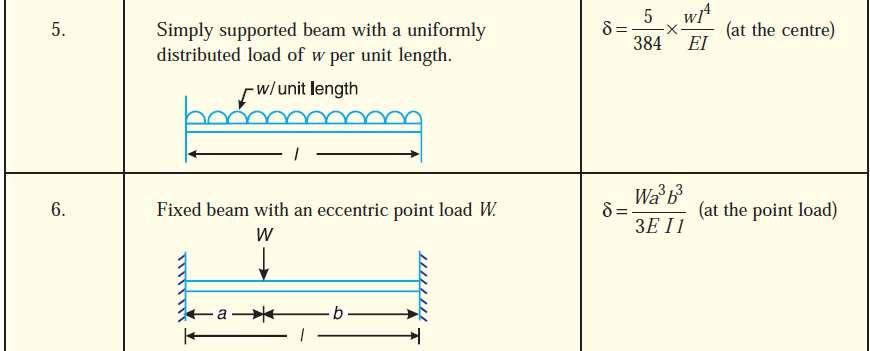
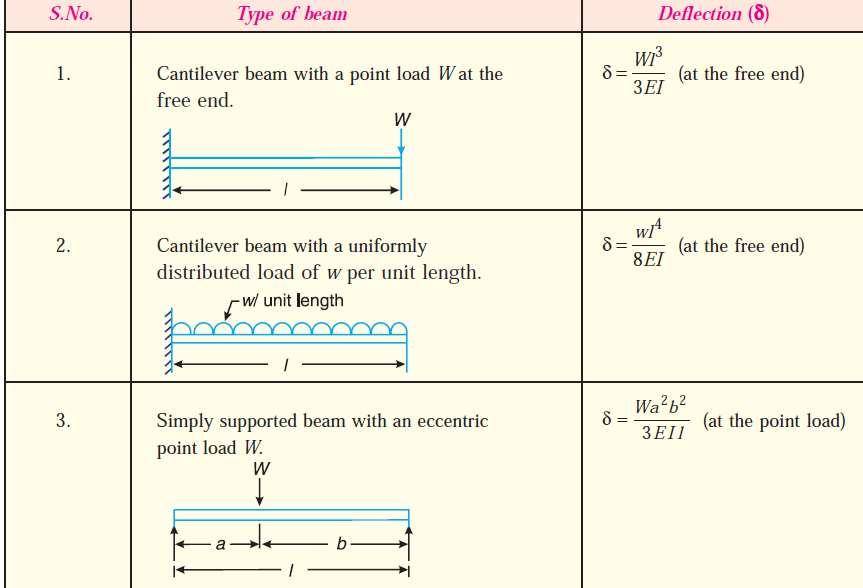
29 Notes: 1. If both the ends of the constraint are fixed, and the disc is situated in the middle of it, then proceeding in the similar way as discussed above, we may prove that the inertia of the constraint may be allowed for by adding disc. of its mass to the 2. If the constraint is like a simply supported beam, then of its mass may be added to the mass of the disc Natural Frequency of Free Transverse Vibrations Due to a Point Load Acting Over a Simply Supported Shaft Consider a shaft AB of length l, carrying a point load W at C which is at a distance of l 1 from A and l 2 from B, as shown in Fig. 12. A little consideration will show that when the shaft is deflected and suddenly released, it will make transverse vibrations. The deflection of the shaft is proportional to the load W and if the beam is deflected beyond the static equilibrium position then the load will vibrate with simple harmonic motion (as by a helical spring). If is the static deflection due to load W, then the natural frequency of the free transverse vibration is = = HZ (g = 9.81m/s 2 ) 29
30 Some of the values of the static deflection for the various types of beams and under various load conditions are given in the following table. Fig.12. Simply supported beam with a point load. Example 2.2. A shaft of length 0.75 m, supported freely at the ends, is carrying a body of mass 90 kg at 0.25 m from one end. Find the natural frequency of transverse vibration. Assume E = 200 GN/m2 and shaft diameter = 50 mm Solution. Given: l = 0.75 m; m = 90 kg; a = AC = 0.25 m; E = 200 GN/m 2 = N/m2; d = 50 mm = 0.05 m The shaft is shown in Fig.13. We know that moment of inertia of the shaft, I = = m 4 Fig. 13 = m 4 and static deflection at the load point (i.e. at point C), 30

31 = = = 0.1 m ( ) We know that natural frequency of transverse vibration, f n = = Hz Example 2.3. A flywheel is mounted on a vertical shaft as shown in Fig.14. The both ends of the shaft are fixed and its diameter is 50 mm. The flywheel has a mass of 500 kg. Find the natural frequencies of longitudinal and transverse vibrations. Take E = 200 GN/m 2. Fig. 14 Solution. Given: d = 50 mm = 0.05 m; m = 500 kg; E = 200 GN/m 2 = N/m 2 We know that cross-sectional area of shaft, A = 2 = m 2 and moment of inertia of shaft, I = 4 = m 4 Natural frequency of longitudinal vibration Let m 1 = Mass of flywheel carried by the length l 1. m m 1 = Mass of flywheel carried by length l 2. We know that extension of length l1 Similarly, compression of length l 2 = = i 31
32 = - ii Since extension of length l1 must be equal to compression of length l2, therefore equating equations (i) and (ii), m 1.l 1 (m m 1 ) l 2 m (500 m 1 ) m 1 or m kg Extension of length l 1, = m We know that natural frequency of transverse vibration, = = = 235 Hz Natural frequency of transverse vibration We know that the static deflection for a shaft fixed at both ends and carrying a point load is given by = = m... (Substituting W = m.g; a = l 1, and b = l 2 ) We know that natural frequency of transverse vibration, = = = 14.24HZ 2.9. Natural Frequency of Free Transverse Vibrations Due to Uniformly Distributed Load Acting Over a Simply Supported Shaft Consider a shaft AB carrying a uniformly distributed load of w per unit length as shown in Fig.15. Let y 1 = Static deflection at the middle of the shaft, a 1 = Amplitude of vibration at the middle of the shaft 32

33 w1 = uniformly distributed load per unit static deflection at the middle of the shaft = w/y1. Fig.15. Simply supported shaft carrying a uniformly distributed load. Now, consider a small section of the shaft at a distance x from A and length x. Let y = Static deflection at a distance x from A, and a = Amplitude of its vibration. Work done on this small section = = = 33

34 When the shaft is a simply supported, then the static deflection at a distance x from A is y = (x 4 2l x 3 + l 3 x) (v) Where w = uniformly distributed load unit length, E = Young s modulus for the material of the shaft, and I = Moment of inertia of the shaft. * It has been proved in books on Strength of Materials that maximum bending moment at a distance x from A is 34
35 35
36 2.10. Natural Frequency of Free Transverse Vibrations of a Shaft Fixed at Both Ends Carrying a Uniformly Distributed Load Consider a shaft AB fixed at both ends and carrying a uniformly distributed load of w per unit length as shown in Fig We know that the static deflection at a distance x from A is given by y = (x 4 + l 2 x 2 2l x 3 )..(i) 36

37 Fig.16. Shaft fixed at both carrying a uniformly distributed load. 37
38 38
39 Since the static deflection of a shaft fixed at both ends and carrying a uniformly distributed load is = or = f n = = HZ... (Substituting, g = 9.81 m/s 2 ) Natural Frequency of Free Transverse Vibrations for a Shaft Subjected to a Number of Point Loads Consider a shaft AB of negligible mass loaded with point loads W 1, W 2, W 3 and W 4 etc. in newton s, as shown in Fig.17. Let m 1, m 2, m 3 and m 4 etc. be the corresponding masses in kg. The natural frequency of such a shaft may be found out by the following two methods: 39
40 Fig.17. Shaft carrying a number of point loads. 1. Energy (or Rayleigh s) method Let y 1, y 2, y 3, y 4 etc. be total deflection under loads W1, W2, W3 and W4 etc. as shown in Fig.17. We know that maximum potential energy 40
41 41


42 2. Dunkerley s method The natural frequency of transverse vibration for a shaft carrying a number of point loads and uniformly distributed load is obtained from Dunkerley s empirical formula. According to this = fn = Natural frequency of transverse vibration of the shaft carrying point loads and uniformly distributed load. fn1, fn 2, fn 3, etc. = Natural frequency of transverse vibration of each point load. fn s = Natural frequency of transverse vibration of the uniformly distributed load (or due to the mass of the shaft). Now, consider a shaft AB loaded as shown in Fig.18. Fig.18. Shaft carrying a number of point loads and a uniformly distributed load. Let 1, 2, 3, etc. = Static deflection due to the load W 1, W 2, W 3 etc. when considered separately. 42
43 S = Static deflection due to the uniformly distributed load or due to the mass of the shaft. We know that natural frequency of transverse vibration due to load W 1, = HZ Similarly, natural frequency of transverse vibration due to load W2, = HZ and, natural frequency of transverse vibration due to load W3, = HZ Also natural frequency of transverse vibration due to uniformly distributed load or weight of the shaft, = HZ Therefore, according to Dunkerley s empirical formula, the natural frequency of the whole system, = = + = [ ] f n = HZ Notes: 1. when there is no uniformly distributed load or mass of the shaft is negligible, then S 0 f n = 2. The value of 1, 2, 3 etc. for a simply supported shaft may be obtained from the relation Where = Static deflection due to load W, a and b = Distances of the load from the ends, E = Young s modulus for the material of the shaft, I = Moment of inertia of the shaft, and l = Total length of the shaft. 43

44 Example 2.4. A shaft 50 mm diameter and 3 metres long is simply supported at the ends and carries three loads of 1000 N, 1500 N and 750 N at 1 m, 2 m and 2.5 m from the left support. The Young's modulus for shaft material is 200 GN/m2. Find the frequency of transverse vibration Fig. 19 Solution. Given: d = 50 mm = 0.05 m; l = 3 m, W1 = 1000 N; W2 = 1500 N ; W3 = 750 N; E = 200 GN/m2 = N/m2 The shaft carrying the loads is shown in Fig.19 We know that moment of inertia of the shaft, I = and the static deflection due to a point load W, = Static deflection due to a load of 1000 N, = = (Here a = 1 m, and b = 2 m) 44
45 2.12. Frequency of Free Damped Vibrations (Viscous Damping) We have already discussed that the motion of a body is resisted by frictional forces. In vibrating systems, the effect of friction is referred to as damping. The damping provided by fluid resistance is known as viscous damping. We have also discussed that in damped vibrations, the amplitude of the resulting vibration gradually diminishes. This is due to the reason that a certain amount of energy is always dissipated to overcome the frictional resistance. The resistance to the motion of the body is provided partly by the medium in which the vibration takes place and partly by the internal friction, and in some cases partly by a dash pot or other external damping device. Consider a vibrating system, as shown in Fig.20, in which a mass is suspended from one end of the spiral spring and the other end of which is fixed. A damper is provided between the mass and the rigid support. 45
46 Fig. 20. Frequency of free damped vibrations. Let m = Mass suspended from the spring, s = Stiffness of the spring, x = Displacement of the mass from the mean position at time t, = Static deflection of the spring = m.g/s, and c = Damping coefficient or the damping force per unit velocity. Since in viscous damping, it is assumed that the frictional resistance to the motion of the body is directly proportional to the speed of the movement, therefore Damping force or frictional force on the mass acting in opposite direction to the motion of the mass = Accelerating force on the mass, acting along the motion of the mass = Accelerating force on the mass, acting along the motion of the mass = s.x Therefore the equation of motion becomes = - (c ) (Negative sign indicates that the force opposes the motion) Or 46
47 Or The most general solution of the differential equation (i) with its right hand side equal to zero has only complementary function and it is given by X 1 = C 1 + C 1... (ii) Where C1 and C2 are two arbitrary constants which are to be determined from the initial conditions of the motion of the mass. It may be noted that the roots k 1 and k 2 may be real, complex conjugate (imaginary) or equal. We shall now discuss these three cases as below: * A system described by this equation is said to be a single degree of freedom harmonic oscillator with viscous damping. 47
48 48
49 49
50 We see from equation (vi), that the motion of the mass is simple harmonic whose circular damped frequency is d and the amplitude is A which diminishes exponentially with time as shown in Fig.21. Though the mass eventually returns to its equilibrium position because of its inertia, yet it overshoots and the oscillations may take some considerable time to die away, 50
] It is the same as discussed under free vibrations. 3.")
51 Fig. 21 Underdamping or small damping. Note: When no damper is provided in the system, then c = 0. Therefore the frequency of the undamped vibration, f n =... [Substituting c = 0, in equation (vii)] It is the same as discussed under free vibrations. 3. When the roots are equal (critical damping) If ( ) =, then the radical becomes zero and the two roots k1 and k 2 are equal. This is a case of critical damping. In other words, the critical 51
52 damping is said to occur when frequency of damped vibration (f d ) is zero (i.e. motion is aperiodic). This type of damping is also avoided because the mass moves back rapidly to its equilibrium position, in the shortest possible time. For critical damping, equation (ii) may be written as Damping Factor or Damping Ratio The ratio of the actual damping coefficient (c) to the critical damping coefficient (C c ) is known as damping factor or damping ratio. Mathematically, Damping factor = =... ( Cc 2 ) The damping factor is the measure of the relative amount of damping in the existing system with that necessary for the critical damped system Logarithmic Decrement It is defined as the natural logarithm of the amplitude reduction factor. The amplitude reduction factor is the ratio of any two successive amplitudes on the same side of the mean position. If x 1 and x 2 are successive values of the amplitude on the same side of the mean position, as shown in Fig.22, then amplitude reduction factor, 52
53 In general, amplitude reduction factor, = = =. = = = constant Logarithmic decrement, 53 ( ) Example 2.5 A vibrating system consists of a mass of 200 kg, a spring of stiffness 80 N/mm and a damper with damping coefficient of 800 N/m/s. Determine the frequency of vibration of the system. Solution. Given: m = 200 kg; s = 80 N/mm = N/m; c = 800 N/m/s We know that circular frequency of undamped vibrations, = 20 rad/s And circular frequency of damped vibrations,
54 = = ( a c / 2m) = ( ) = 19.9rad/s Frequency of vibration of the system, f d d / / Hz Ans. Example 2.6. The following data are given for a vibratory system with viscous damping: Mass = 2.5 kg; spring constant = 3 N/mm and the amplitude decreases to 0.25 of the initial value after five consecutive cycles. Determine the damping coefficient of the damper in the system. Solution. Given: m = 2.5 kg; s = 3 N/mm = 3000 N/m; x 6 = 0.25 x 1 We know that natural circular frequency of vibration, (1.32) = a Squaring both sides, = or or = a / (1200-a 2 ) 54

55 = 39.5a 2 ; a 2 = or a = 1.53 We know that a = C/2m or C = a = 1.53 /m/s Example 2.7. An instrument vibrates with a frequency of 1 Hz when there is no damping. When the damping is provided, the frequency of damped vibrations was observed to be 0.9 Hz. Find 1. The damping factor, and 2. Logarithmic decrement. Solution. Given: f n = 1 Hz; f d = 0.9 Hz 1. Damping factor Let m = Mass of the instrument in kg, c = Damping coefficient or damping force per unit velocity in N/m/s, and c c = Critical damping coefficient in N/m/s. We know that natural circular frequency of undamped vibrations, n 2 f n rad/s And circular frequency of damped vibrations, d 2 fd rad/s We also know that circular frequency of damped vibrations ( d), 55
56 Example 2.8. The measurements on a mechanical vibrating system show that it has a mass of 8 kg and that the springs can be combined to give an equivalent spring of stiffness 5.4 N/mm. If the vibrating system have a dashpot attached which exerts a force of 40 N when the mass has a velocity of 1 m/s, find: 1. critical damping coefficient, 2. damping factor, 3. Logarithmic decrement, and 4. ratio of two consecutive amplitudes. Solution. Given: m = 8 kg; s = 5.4 N/mm = 5400 N/m Since the force exerted by dashpot is 40 N, and the mass has a velocity of 1 m/s, therefore Damping coefficient (actual), c = 40 N/m/s We know that ( ) =a.t p or = a 0.5 = 0.67a or 1.61 = 0.67a or a = 2.4..( ) 56
57 Example 2.9. A coil of spring stiffness 4 N/mm supports vertically a mass of 20 kg at the free end. The motion is resisted by the oil dashpot. It is found that the amplitude at the beginning of the fourth cycle is 0.8 times the amplitude of the previous vibration. Determine the damping force per unit velocity. Also find the ratio of the frequency of damped and undamped vibrations. Solution. Given: s = 4 N/mm = 4000 N/m; m = 20 kg Damping force per unit velocity Let c = Damping force in newtons per unit velocity i.e. in N/m/s x n = Amplitude at the beginning of the third cycle, x n+1 = Amplitude at the beginning of the fourth cycle = 0.8 x n... (Given) Squaring both sides 0.05 = = 10/39.5a 2 = 0.25 or a = 0.5 We know that a = c/2m, then c = a 2m = = 20 N/m/s 57
58 Ratio of the frequencies Let f n1 = Frequency of damped vibrations = f n2 =Frequency of undamped vibrations = = = = =... ( = Example A machine of mass 75 kg is mounted on springs and is fitted with a dashpot to damp out vibrations. There are three springs each of stiffness 10 N/mm and it is found that the amplitude of vibration diminishes from 38.4 mm to 6.4 mm in two complete oscillations. Assuming that the damping force varies as the velocity, determine: 1. the resistance of the dashpot at unit velocity; 2. the ratio of the frequency of the damped vibration to the frequency of the undamped vibration; and 3. the periodic time of the damped vibration. Solution. Given: m = 75 kg; s = 10 N/mm = N/m; x 1 = 38.4 mm = m; x 3 = 6.4 mm = m Since the stiffness of each spring is N/m and there are 3 springs, therefore total stiffness, s N/m We know that natural circular frequency of motion, = = = 20rad/s 1. Resistance of the dashpot at unit velocity Let c = Resistance of the dashpot in newtons at unit velocity i.e. in N/m/s, x 2 = Amplitude after one complete oscillation in metres, and x 3 = Amplitude after two complete oscillations in metres. We know that [ ] = [ ] 58
59 Or * + = ( ) = 2.45 We also know that log e = log 2.45 or 0.8 = a a =0.8951= (Squaring both sides) a 2 = 7.94 or a = 2.8 We know that a = c / 2m c = a 2m = = 420 N/m/s Ans. Example The mass of a single degree damped vibrating system is 7.5 kg and makes 24 free oscillations in 14 seconds when disturbed from its equilibrium position. The amplitude of vibration reduces to 0.25 of its initial value after five oscillations. Determine: 1. stiffness of the spring, 2. logarithmic decrement, and 3. damping factor, i.e. the ratio of the system damping to critical damping. Solution. Given: m = 7.5 kg Since 24 oscillations are made in 14 seconds, therefore frequency of free vibrations, fn = 24/14 = 1.7 and 2 fn rad/s 59
60 1. Stiffness of the spring Let s = Stiffness of the spring in N/m. We know that ( s /m or s ( (10.7) = 860 N/m Ans. 2. Logarithmic decrement Let x1 = Initial amplitude, X6 = Final amplitude after five oscillations = 0.25 x1... (Given) = [ ] 60
This equation of motion may be solved either by differential equation method or by graphical method as discussed below:
 2.15. Frequency of Under Damped Forced Vibrations Consider a system consisting of spring, mass and damper as shown in Fig. 22. Let the system is acted upon by an external periodic (i.e. simple harmonic)
2.15. Frequency of Under Damped Forced Vibrations Consider a system consisting of spring, mass and damper as shown in Fig. 22. Let the system is acted upon by an external periodic (i.e. simple harmonic)
Engineering Science OUTCOME 2 - TUTORIAL 3 FREE VIBRATIONS
 Unit 2: Unit code: QCF Level: 4 Credit value: 5 Engineering Science L/60/404 OUTCOME 2 - TUTORIAL 3 FREE VIBRATIONS UNIT CONTENT OUTCOME 2 Be able to determine the behavioural characteristics of elements
Unit 2: Unit code: QCF Level: 4 Credit value: 5 Engineering Science L/60/404 OUTCOME 2 - TUTORIAL 3 FREE VIBRATIONS UNIT CONTENT OUTCOME 2 Be able to determine the behavioural characteristics of elements
ENGINEERING COUNCIL DYNAMICS OF MECHANICAL SYSTEMS D225 TUTORIAL 10 NATURAL VIBRATIONS ONE DEGREE OF FREEDOM
 ENGINEERING COUNCIL DYNAMICS OF MECHANICAL SYSTEMS D5 TUTORIAL 0 NATURAL VIBRATIONS ONE DEGREE OF FREEDOM On completion of this tutorial you should be able to do the following. Explain the meaning of degrees
ENGINEERING COUNCIL DYNAMICS OF MECHANICAL SYSTEMS D5 TUTORIAL 0 NATURAL VIBRATIONS ONE DEGREE OF FREEDOM On completion of this tutorial you should be able to do the following. Explain the meaning of degrees
Chapter 12 Vibrations and Waves Simple Harmonic Motion page
 Chapter 2 Vibrations and Waves 2- Simple Harmonic Motion page 438-45 Hooke s Law Periodic motion the object has a repeated motion that follows the same path, the object swings to and fro. Examples: a pendulum
Chapter 2 Vibrations and Waves 2- Simple Harmonic Motion page 438-45 Hooke s Law Periodic motion the object has a repeated motion that follows the same path, the object swings to and fro. Examples: a pendulum
Chapter 15. Oscillatory Motion
 Chapter 15 Oscillatory Motion Part 2 Oscillations and Mechanical Waves Periodic motion is the repeating motion of an object in which it continues to return to a given position after a fixed time interval.
Chapter 15 Oscillatory Motion Part 2 Oscillations and Mechanical Waves Periodic motion is the repeating motion of an object in which it continues to return to a given position after a fixed time interval.
UNIT-I (FORCE ANALYSIS)
") DHANALAKSHMI SRINIVASAN INSTITUTE OF RESEACH AND TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK ME2302 DYNAMICS OF MACHINERY III YEAR/ V SEMESTER UNIT-I (FORCE ANALYSIS) PART-A (2 marks)
DHANALAKSHMI SRINIVASAN INSTITUTE OF RESEACH AND TECHNOLOGY DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK ME2302 DYNAMICS OF MACHINERY III YEAR/ V SEMESTER UNIT-I (FORCE ANALYSIS) PART-A (2 marks)
Periodic Motion. Periodic motion is motion of an object that. regularly repeats
 Periodic Motion Periodic motion is motion of an object that regularly repeats The object returns to a given position after a fixed time interval A special kind of periodic motion occurs in mechanical systems
Periodic Motion Periodic motion is motion of an object that regularly repeats The object returns to a given position after a fixed time interval A special kind of periodic motion occurs in mechanical systems
STRUCTURAL DYNAMICS BASICS:
 BASICS: STRUCTURAL DYNAMICS Real-life structures are subjected to loads which vary with time Except self weight of the structure, all other loads vary with time In many cases, this variation of the load
BASICS: STRUCTURAL DYNAMICS Real-life structures are subjected to loads which vary with time Except self weight of the structure, all other loads vary with time In many cases, this variation of the load
Chapter 14 Oscillations. Copyright 2009 Pearson Education, Inc.
 Chapter 14 Oscillations Oscillations of a Spring Simple Harmonic Motion Energy in the Simple Harmonic Oscillator Simple Harmonic Motion Related to Uniform Circular Motion The Simple Pendulum The Physical
Chapter 14 Oscillations Oscillations of a Spring Simple Harmonic Motion Energy in the Simple Harmonic Oscillator Simple Harmonic Motion Related to Uniform Circular Motion The Simple Pendulum The Physical
ME2302 DYNAMICS OF MACHINERY
 ME2302 DYNAMICS OF MACHINERY TWO MARKS QUESTION AND ANSWERS 1. What are the conditions for a body to be in static and dynamic equilibrium? Necessary and sufficient conditions for static and dynamic equilibrium
ME2302 DYNAMICS OF MACHINERY TWO MARKS QUESTION AND ANSWERS 1. What are the conditions for a body to be in static and dynamic equilibrium? Necessary and sufficient conditions for static and dynamic equilibrium
TOPIC E: OSCILLATIONS SPRING 2019
 TOPIC E: OSCILLATIONS SPRING 2019 1. Introduction 1.1 Overview 1.2 Degrees of freedom 1.3 Simple harmonic motion 2. Undamped free oscillation 2.1 Generalised mass-spring system: simple harmonic motion
TOPIC E: OSCILLATIONS SPRING 2019 1. Introduction 1.1 Overview 1.2 Degrees of freedom 1.3 Simple harmonic motion 2. Undamped free oscillation 2.1 Generalised mass-spring system: simple harmonic motion
Oscillatory Motion SHM
 Chapter 15 Oscillatory Motion SHM Dr. Armen Kocharian Periodic Motion Periodic motion is motion of an object that regularly repeats The object returns to a given position after a fixed time interval A
Chapter 15 Oscillatory Motion SHM Dr. Armen Kocharian Periodic Motion Periodic motion is motion of an object that regularly repeats The object returns to a given position after a fixed time interval A
Simple Harmonic Motion
 Chapter 9 Simple Harmonic Motion In This Chapter: Restoring Force Elastic Potential Energy Simple Harmonic Motion Period and Frequency Displacement, Velocity, and Acceleration Pendulums Restoring Force
Chapter 9 Simple Harmonic Motion In This Chapter: Restoring Force Elastic Potential Energy Simple Harmonic Motion Period and Frequency Displacement, Velocity, and Acceleration Pendulums Restoring Force
Members Subjected to Torsional Loads
 Members Subjected to Torsional Loads Torsion of circular shafts Definition of Torsion: Consider a shaft rigidly clamped at one end and twisted at the other end by a torque T = F.d applied in a plane perpendicular
Members Subjected to Torsional Loads Torsion of circular shafts Definition of Torsion: Consider a shaft rigidly clamped at one end and twisted at the other end by a torque T = F.d applied in a plane perpendicular
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Introduction to vibration
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Introduction to vibration Module 15 Lecture 38 Vibration of Rigid Bodies Part-1 Today,
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Introduction to vibration Module 15 Lecture 38 Vibration of Rigid Bodies Part-1 Today,
C7047. PART A Answer all questions, each carries 5 marks.
 7047 Reg No.: Total Pages: 3 Name: Max. Marks: 100 PJ DUL KLM TEHNOLOGIL UNIVERSITY FIRST SEMESTER.TEH DEGREE EXMINTION, DEEMER 2017 ourse ode: E100 ourse Name: ENGINEERING MEHNIS PRT nswer all questions,
7047 Reg No.: Total Pages: 3 Name: Max. Marks: 100 PJ DUL KLM TEHNOLOGIL UNIVERSITY FIRST SEMESTER.TEH DEGREE EXMINTION, DEEMER 2017 ourse ode: E100 ourse Name: ENGINEERING MEHNIS PRT nswer all questions,
Chapter 14: Periodic motion
 Chapter 14: Periodic motion Describing oscillations Simple harmonic motion Energy of simple harmonic motion Applications of simple harmonic motion Simple pendulum & physical pendulum Damped oscillations
Chapter 14: Periodic motion Describing oscillations Simple harmonic motion Energy of simple harmonic motion Applications of simple harmonic motion Simple pendulum & physical pendulum Damped oscillations
Dynamics of Machinery
 Dynamics of Machinery Two Mark Questions & Answers Varun B Page 1 Force Analysis 1. Define inertia force. Inertia force is an imaginary force, which when acts upon a rigid body, brings it to an equilibrium
Dynamics of Machinery Two Mark Questions & Answers Varun B Page 1 Force Analysis 1. Define inertia force. Inertia force is an imaginary force, which when acts upon a rigid body, brings it to an equilibrium
Lectures Chapter 10 (Cutnell & Johnson, Physics 7 th edition)
") PH 201-4A spring 2007 Simple Harmonic Motion Lectures 24-25 Chapter 10 (Cutnell & Johnson, Physics 7 th edition) 1 The Ideal Spring Springs are objects that exhibit elastic behavior. It will return back
PH 201-4A spring 2007 Simple Harmonic Motion Lectures 24-25 Chapter 10 (Cutnell & Johnson, Physics 7 th edition) 1 The Ideal Spring Springs are objects that exhibit elastic behavior. It will return back
1. What would be the value of F1 to balance the system if F2=20N? 20cm T =? 20kg
 1. What would be the value of F1 to balance the system if F2=20N? F2 5cm 20cm F1 (a) 3 N (b) 5 N (c) 4N (d) None of the above 2. The stress in a wire of diameter 2 mm, if a load of 100 gram is applied
1. What would be the value of F1 to balance the system if F2=20N? F2 5cm 20cm F1 (a) 3 N (b) 5 N (c) 4N (d) None of the above 2. The stress in a wire of diameter 2 mm, if a load of 100 gram is applied
18.12 FORCED-DAMPED VIBRATIONS
 8. ORCED-DAMPED VIBRATIONS Vibrations A mass m is attached to a helical spring and is suspended from a fixed support as before. Damping is also provided in the system ith a dashpot (ig. 8.). Before the
8. ORCED-DAMPED VIBRATIONS Vibrations A mass m is attached to a helical spring and is suspended from a fixed support as before. Damping is also provided in the system ith a dashpot (ig. 8.). Before the
Quantitative Skills in AP Physics 1
 This chapter focuses on some of the quantitative skills that are important in your AP Physics 1 course. These are not all of the skills that you will learn, practice, and apply during the year, but these
This chapter focuses on some of the quantitative skills that are important in your AP Physics 1 course. These are not all of the skills that you will learn, practice, and apply during the year, but these
Chapter 10 Lecture Outline. Copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display.
 Chapter 10 Lecture Outline Copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display. 1 Chapter 10: Elasticity and Oscillations Elastic Deformations Hooke s Law Stress and
Chapter 10 Lecture Outline Copyright The McGraw-Hill Companies, Inc. Permission required for reproduction or display. 1 Chapter 10: Elasticity and Oscillations Elastic Deformations Hooke s Law Stress and
Oscillations. PHYS 101 Previous Exam Problems CHAPTER. Simple harmonic motion Mass-spring system Energy in SHM Pendulums
 PHYS 101 Previous Exam Problems CHAPTER 15 Oscillations Simple harmonic motion Mass-spring system Energy in SHM Pendulums 1. The displacement of a particle oscillating along the x axis is given as a function
PHYS 101 Previous Exam Problems CHAPTER 15 Oscillations Simple harmonic motion Mass-spring system Energy in SHM Pendulums 1. The displacement of a particle oscillating along the x axis is given as a function
PHYS 1114, Lecture 33, April 10 Contents:
 PHYS 1114, Lecture 33, April 10 Contents: 1 This class is o cially cancelled, and has been replaced by the common exam Tuesday, April 11, 5:30 PM. A review and Q&A session is scheduled instead during class
PHYS 1114, Lecture 33, April 10 Contents: 1 This class is o cially cancelled, and has been replaced by the common exam Tuesday, April 11, 5:30 PM. A review and Q&A session is scheduled instead during class
T1 T e c h n i c a l S e c t i o n
 1.5 Principles of Noise Reduction A good vibration isolation system is reducing vibration transmission through structures and thus, radiation of these vibration into air, thereby reducing noise. There
1.5 Principles of Noise Reduction A good vibration isolation system is reducing vibration transmission through structures and thus, radiation of these vibration into air, thereby reducing noise. There
Physics General Physics. Lecture 24 Oscillating Systems. Fall 2016 Semester Prof. Matthew Jones
 Physics 22000 General Physics Lecture 24 Oscillating Systems Fall 2016 Semester Prof. Matthew Jones 1 2 Oscillating Motion We have studied linear motion objects moving in straight lines at either constant
Physics 22000 General Physics Lecture 24 Oscillating Systems Fall 2016 Semester Prof. Matthew Jones 1 2 Oscillating Motion We have studied linear motion objects moving in straight lines at either constant
QUESTION BANK SEMESTER: III SUBJECT NAME: MECHANICS OF SOLIDS
 QUESTION BANK SEMESTER: III SUBJECT NAME: MECHANICS OF SOLIDS UNIT 1- STRESS AND STRAIN PART A (2 Marks) 1. Define longitudinal strain and lateral strain. 2. State Hooke s law. 3. Define modular ratio,
QUESTION BANK SEMESTER: III SUBJECT NAME: MECHANICS OF SOLIDS UNIT 1- STRESS AND STRAIN PART A (2 Marks) 1. Define longitudinal strain and lateral strain. 2. State Hooke s law. 3. Define modular ratio,
VTU-NPTEL-NMEICT Project
 MODULE-II --- SINGLE DOF FREE S VTU-NPTEL-NMEICT Project Progress Report The Project on Development of Remaining Three Quadrants to NPTEL Phase-I under grant in aid NMEICT, MHRD, New Delhi SME Name : Course
MODULE-II --- SINGLE DOF FREE S VTU-NPTEL-NMEICT Project Progress Report The Project on Development of Remaining Three Quadrants to NPTEL Phase-I under grant in aid NMEICT, MHRD, New Delhi SME Name : Course
CHAPTER 12 OSCILLATORY MOTION
 CHAPTER 1 OSCILLATORY MOTION Before starting the discussion of the chapter s concepts it is worth to define some terms we will use frequently in this chapter: 1. The period of the motion, T, is the time
CHAPTER 1 OSCILLATORY MOTION Before starting the discussion of the chapter s concepts it is worth to define some terms we will use frequently in this chapter: 1. The period of the motion, T, is the time
Chapter 14 Periodic Motion
 Chapter 14 Periodic Motion 1 Describing Oscillation First, we want to describe the kinematical and dynamical quantities associated with Simple Harmonic Motion (SHM), for example, x, v x, a x, and F x.
Chapter 14 Periodic Motion 1 Describing Oscillation First, we want to describe the kinematical and dynamical quantities associated with Simple Harmonic Motion (SHM), for example, x, v x, a x, and F x.
WEEKS 8-9 Dynamics of Machinery
 WEEKS 8-9 Dynamics of Machinery References Theory of Machines and Mechanisms, J.J.Uicker, G.R.Pennock ve J.E. Shigley, 2011 Mechanical Vibrations, Singiresu S. Rao, 2010 Mechanical Vibrations: Theory and
WEEKS 8-9 Dynamics of Machinery References Theory of Machines and Mechanisms, J.J.Uicker, G.R.Pennock ve J.E. Shigley, 2011 Mechanical Vibrations, Singiresu S. Rao, 2010 Mechanical Vibrations: Theory and
Dept of ECE, SCMS Cochin
 B B2B109 Pages: 3 Reg. No. Name: APJ ABDUL KALAM TECHNOLOGICAL UNIVERSITY SECOND SEMESTER B.TECH DEGREE EXAMINATION, MAY 2017 Course Code: BE 100 Course Name: ENGINEERING MECHANICS Max. Marks: 100 Duration:
B B2B109 Pages: 3 Reg. No. Name: APJ ABDUL KALAM TECHNOLOGICAL UNIVERSITY SECOND SEMESTER B.TECH DEGREE EXAMINATION, MAY 2017 Course Code: BE 100 Course Name: ENGINEERING MECHANICS Max. Marks: 100 Duration:
TOPIC E: OSCILLATIONS EXAMPLES SPRING Q1. Find general solutions for the following differential equations:
 TOPIC E: OSCILLATIONS EXAMPLES SPRING 2019 Mathematics of Oscillating Systems Q1. Find general solutions for the following differential equations: Undamped Free Vibration Q2. A 4 g mass is suspended by
TOPIC E: OSCILLATIONS EXAMPLES SPRING 2019 Mathematics of Oscillating Systems Q1. Find general solutions for the following differential equations: Undamped Free Vibration Q2. A 4 g mass is suspended by
Chapter 14. Oscillations. Oscillations Introductory Terminology Simple Harmonic Motion:
 Chapter 14 Oscillations Oscillations Introductory Terminology Simple Harmonic Motion: Kinematics Energy Examples of Simple Harmonic Oscillators Damped and Forced Oscillations. Resonance. Periodic Motion
Chapter 14 Oscillations Oscillations Introductory Terminology Simple Harmonic Motion: Kinematics Energy Examples of Simple Harmonic Oscillators Damped and Forced Oscillations. Resonance. Periodic Motion
EXERCISE - 01 NEETIIT.COM. d x dt. = 2 x 2 (4)
") 1. The acceleration of a particle executing S.H.M. is (1) Always directed towards the equillibrium position () Always towards the one end (3) Continuously changing in direction () Maximum at the mean position.
1. The acceleration of a particle executing S.H.M. is (1) Always directed towards the equillibrium position () Always towards the one end (3) Continuously changing in direction () Maximum at the mean position.
EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION
 1 EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION The course on Mechanical Vibration is an important part of the Mechanical Engineering undergraduate curriculum. It is necessary for the development
1 EQUIVALENT SINGLE-DEGREE-OF-FREEDOM SYSTEM AND FREE VIBRATION The course on Mechanical Vibration is an important part of the Mechanical Engineering undergraduate curriculum. It is necessary for the development
UNIT 1 STRESS STRAIN AND DEFORMATION OF SOLIDS, STATES OF STRESS 1. Define stress. When an external force acts on a body, it undergoes deformation.
 UNIT 1 STRESS STRAIN AND DEFORMATION OF SOLIDS, STATES OF STRESS 1. Define stress. When an external force acts on a body, it undergoes deformation. At the same time the body resists deformation. The magnitude
UNIT 1 STRESS STRAIN AND DEFORMATION OF SOLIDS, STATES OF STRESS 1. Define stress. When an external force acts on a body, it undergoes deformation. At the same time the body resists deformation. The magnitude
Class XI Physics Syllabus One Paper Three Hours Max Marks: 70
 Class XI Physics Syllabus 2013 One Paper Three Hours Max Marks: 70 Class XI Weightage Unit I Physical World & Measurement 03 Unit II Kinematics 10 Unit III Laws of Motion 10 Unit IV Work, Energy & Power
Class XI Physics Syllabus 2013 One Paper Three Hours Max Marks: 70 Class XI Weightage Unit I Physical World & Measurement 03 Unit II Kinematics 10 Unit III Laws of Motion 10 Unit IV Work, Energy & Power
Physics 2001/2051 The Compound Pendulum Experiment 4 and Helical Springs
 PY001/051 Compound Pendulum and Helical Springs Experiment 4 Physics 001/051 The Compound Pendulum Experiment 4 and Helical Springs Prelab 1 Read the following background/setup and ensure you are familiar
PY001/051 Compound Pendulum and Helical Springs Experiment 4 Physics 001/051 The Compound Pendulum Experiment 4 and Helical Springs Prelab 1 Read the following background/setup and ensure you are familiar
Oscillations. Oscillations and Simple Harmonic Motion
 Oscillations AP Physics C Oscillations and Simple Harmonic Motion 1 Equilibrium and Oscillations A marble that is free to roll inside a spherical bowl has an equilibrium position at the bottom of the bowl
Oscillations AP Physics C Oscillations and Simple Harmonic Motion 1 Equilibrium and Oscillations A marble that is free to roll inside a spherical bowl has an equilibrium position at the bottom of the bowl
Physics. Student Materials Advanced Higher. Tutorial Problems Mechanics HIGHER STILL. Spring 2000
 Spring 2000 HIGHER STILL Physics Student Materials Advanced Higher Tutorial Problems Mechanics TUTORIAL 1 You will find tutorials on each topic. The fully worked out answers are available. The idea is
Spring 2000 HIGHER STILL Physics Student Materials Advanced Higher Tutorial Problems Mechanics TUTORIAL 1 You will find tutorials on each topic. The fully worked out answers are available. The idea is
WORK SHEET FOR MEP311
 EXPERIMENT II-1A STUDY OF PRESSURE DISTRIBUTIONS IN LUBRICATING OIL FILMS USING MICHELL TILTING PAD APPARATUS OBJECTIVE To study generation of pressure profile along and across the thick fluid film (converging,
EXPERIMENT II-1A STUDY OF PRESSURE DISTRIBUTIONS IN LUBRICATING OIL FILMS USING MICHELL TILTING PAD APPARATUS OBJECTIVE To study generation of pressure profile along and across the thick fluid film (converging,
Raymond A. Serway Chris Vuille. Chapter Thirteen. Vibrations and Waves
 Raymond A. Serway Chris Vuille Chapter Thirteen Vibrations and Waves Periodic Motion and Waves Periodic motion is one of the most important kinds of physical behavior Will include a closer look at Hooke
Raymond A. Serway Chris Vuille Chapter Thirteen Vibrations and Waves Periodic Motion and Waves Periodic motion is one of the most important kinds of physical behavior Will include a closer look at Hooke
Chapter 14 (Oscillations) Key concept: Downloaded from
 Key concept: Downloaded from") Chapter 14 (Oscillations) Multiple Choice Questions Single Correct Answer Type Q1. The displacement of a particle is represented by the equation. The motion of the particle is (a) simple harmonic with
Chapter 14 (Oscillations) Multiple Choice Questions Single Correct Answer Type Q1. The displacement of a particle is represented by the equation. The motion of the particle is (a) simple harmonic with
QUESTION BANK DEPARTMENT: CIVIL SEMESTER: III SUBJECT CODE: CE2201 SUBJECT NAME: MECHANICS OF SOLIDS UNIT 1- STRESS AND STRAIN PART A
 DEPARTMENT: CIVIL SUBJECT CODE: CE2201 QUESTION BANK SEMESTER: III SUBJECT NAME: MECHANICS OF SOLIDS UNIT 1- STRESS AND STRAIN PART A (2 Marks) 1. Define longitudinal strain and lateral strain. 2. State
DEPARTMENT: CIVIL SUBJECT CODE: CE2201 QUESTION BANK SEMESTER: III SUBJECT NAME: MECHANICS OF SOLIDS UNIT 1- STRESS AND STRAIN PART A (2 Marks) 1. Define longitudinal strain and lateral strain. 2. State
Mathematical Modeling and response analysis of mechanical systems are the subjects of this chapter.
 Chapter 3 Mechanical Systems A. Bazoune 3.1 INRODUCION Mathematical Modeling and response analysis of mechanical systems are the subjects of this chapter. 3. MECHANICAL ELEMENS Any mechanical system consists
Chapter 3 Mechanical Systems A. Bazoune 3.1 INRODUCION Mathematical Modeling and response analysis of mechanical systems are the subjects of this chapter. 3. MECHANICAL ELEMENS Any mechanical system consists
C. points X and Y only. D. points O, X and Y only. (Total 1 mark)
") Grade 11 Physics -- Homework 16 -- Answers on a separate sheet of paper, please 1. A cart, connected to two identical springs, is oscillating with simple harmonic motion between two points X and Y that
Grade 11 Physics -- Homework 16 -- Answers on a separate sheet of paper, please 1. A cart, connected to two identical springs, is oscillating with simple harmonic motion between two points X and Y that
INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad
 Dundigal, Hyderabad") INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 043 AERONAUTICAL ENGINEERING DEFINITIONS AND TERMINOLOGY Course Name : ENGINEERING MECHANICS Course Code : AAEB01 Program :
INSTITUTE OF AERONAUTICAL ENGINEERING (Autonomous) Dundigal, Hyderabad - 500 043 AERONAUTICAL ENGINEERING DEFINITIONS AND TERMINOLOGY Course Name : ENGINEERING MECHANICS Course Code : AAEB01 Program :
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK. Subject code/name: ME2254/STRENGTH OF MATERIALS Year/Sem:II / IV
 KINGS COLLEGE OF ENGINEERING DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK Subject code/name: ME2254/STRENGTH OF MATERIALS Year/Sem:II / IV UNIT I STRESS, STRAIN DEFORMATION OF SOLIDS PART A (2 MARKS)
KINGS COLLEGE OF ENGINEERING DEPARTMENT OF MECHANICAL ENGINEERING QUESTION BANK Subject code/name: ME2254/STRENGTH OF MATERIALS Year/Sem:II / IV UNIT I STRESS, STRAIN DEFORMATION OF SOLIDS PART A (2 MARKS)
Structural Dynamics Lecture 4. Outline of Lecture 4. Multi-Degree-of-Freedom Systems. Formulation of Equations of Motions. Undamped Eigenvibrations.
 Outline of Multi-Degree-of-Freedom Systems Formulation of Equations of Motions. Newton s 2 nd Law Applied to Free Masses. D Alembert s Principle. Basic Equations of Motion for Forced Vibrations of Linear
Outline of Multi-Degree-of-Freedom Systems Formulation of Equations of Motions. Newton s 2 nd Law Applied to Free Masses. D Alembert s Principle. Basic Equations of Motion for Forced Vibrations of Linear
OSCILLATIONS ABOUT EQUILIBRIUM
 OSCILLATIONS ABOUT EQUILIBRIUM Chapter 13 Units of Chapter 13 Periodic Motion Simple Harmonic Motion Connections between Uniform Circular Motion and Simple Harmonic Motion The Period of a Mass on a Spring
OSCILLATIONS ABOUT EQUILIBRIUM Chapter 13 Units of Chapter 13 Periodic Motion Simple Harmonic Motion Connections between Uniform Circular Motion and Simple Harmonic Motion The Period of a Mass on a Spring
Outline. Hook s law. Mass spring system Simple harmonic motion Travelling waves Waves in string Sound waves
 Outline Hook s law. Mass spring system Simple harmonic motion Travelling waves Waves in string Sound waves Hooke s Law Force is directly proportional to the displacement of the object from the equilibrium
Outline Hook s law. Mass spring system Simple harmonic motion Travelling waves Waves in string Sound waves Hooke s Law Force is directly proportional to the displacement of the object from the equilibrium
MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question.
 Exam Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) A 4.8-kg block attached to a spring executes simple harmonic motion on a frictionless
Exam Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) A 4.8-kg block attached to a spring executes simple harmonic motion on a frictionless
Mechatronics. MANE 4490 Fall 2002 Assignment # 1
 Mechatronics MANE 4490 Fall 2002 Assignment # 1 1. For each of the physical models shown in Figure 1, derive the mathematical model (equation of motion). All displacements are measured from the static
Mechatronics MANE 4490 Fall 2002 Assignment # 1 1. For each of the physical models shown in Figure 1, derive the mathematical model (equation of motion). All displacements are measured from the static
Chapter a. Spring constant, k : The change in the force per unit length change of the spring. b. Coefficient of subgrade reaction, k:
 Principles of Soil Dynamics 3rd Edition Das SOLUTIONS MANUAL Full clear download (no formatting errors) at: https://testbankreal.com/download/principles-soil-dynamics-3rd-editiondas-solutions-manual/ Chapter
Principles of Soil Dynamics 3rd Edition Das SOLUTIONS MANUAL Full clear download (no formatting errors) at: https://testbankreal.com/download/principles-soil-dynamics-3rd-editiondas-solutions-manual/ Chapter
Page kg kg kg kg (Total 1 mark) Q4. The diagram shows two positions, X and Y, o the Ea th s su fa e.
 Q4. The diagram shows two positions, X and Y, o the Ea th s su fa e.") Q1. body moves with simple harmonic motion of amplitude and frequency What is the magnitude of the acceleration when the body is at maximum displacement? zero 4π 2 b 2 b 2 PhysicsndMathsTutor.com Page
Q1. body moves with simple harmonic motion of amplitude and frequency What is the magnitude of the acceleration when the body is at maximum displacement? zero 4π 2 b 2 b 2 PhysicsndMathsTutor.com Page
Varuvan Vadivelan. Institute of Technology LAB MANUAL. : 2013 : B.E. MECHANICAL ENGINEERING : III Year / V Semester. Regulation Branch Year & Semester
 Varuvan Vadivelan Institute of Technology Dharmapuri 636 703 LAB MANUAL Regulation Branch Year & Semester : 2013 : B.E. MECHANICAL ENGINEERING : III Year / V Semester ME 6511 - DYNAMICS LABORATORY GENERAL
Varuvan Vadivelan Institute of Technology Dharmapuri 636 703 LAB MANUAL Regulation Branch Year & Semester : 2013 : B.E. MECHANICAL ENGINEERING : III Year / V Semester ME 6511 - DYNAMICS LABORATORY GENERAL
Physics Mechanics. Lecture 32 Oscillations II
 Physics 170 - Mechanics Lecture 32 Oscillations II Gravitational Potential Energy A plot of the gravitational potential energy U g looks like this: Energy Conservation Total mechanical energy of an object
Physics 170 - Mechanics Lecture 32 Oscillations II Gravitational Potential Energy A plot of the gravitational potential energy U g looks like this: Energy Conservation Total mechanical energy of an object
Axis Balanced Forces Centripetal force. Change in velocity Circular Motion Circular orbit Collision. Conservation of Energy
 When something changes its velocity The rate of change of velocity of a moving object. Can result from a change in speed and/or a change in direction On surface of earth, value is 9.8 ms-²; increases nearer
When something changes its velocity The rate of change of velocity of a moving object. Can result from a change in speed and/or a change in direction On surface of earth, value is 9.8 ms-²; increases nearer
AP Physics. Harmonic Motion. Multiple Choice. Test E
 AP Physics Harmonic Motion Multiple Choice Test E A 0.10-Kg block is attached to a spring, initially unstretched, of force constant k = 40 N m as shown below. The block is released from rest at t = 0 sec.
AP Physics Harmonic Motion Multiple Choice Test E A 0.10-Kg block is attached to a spring, initially unstretched, of force constant k = 40 N m as shown below. The block is released from rest at t = 0 sec.
COMPOUND PENDULUM. AIM: 01. To determine the radius of gyration k of given compo pendulum. 02. To verify the relation
 COMPOUND PENDULUM AIM: 01. To determine the radius of gyration k of given compo pendulum. 02. To verify the relation T= 2 π 2 2 K + (OG) g (OG) Where, T = Periodic time sec. K = Radius of gyration about
COMPOUND PENDULUM AIM: 01. To determine the radius of gyration k of given compo pendulum. 02. To verify the relation T= 2 π 2 2 K + (OG) g (OG) Where, T = Periodic time sec. K = Radius of gyration about
Chapter 15. Oscillations
 Chapter 15 Oscillations 15.1 Simple Harmonic Motion Oscillatory Motion: Motion which is periodic in time; motion that repeats itself in time. Examples: SHM: Power line oscillates when the wind blows past.
Chapter 15 Oscillations 15.1 Simple Harmonic Motion Oscillatory Motion: Motion which is periodic in time; motion that repeats itself in time. Examples: SHM: Power line oscillates when the wind blows past.
本教材僅供教學使用, 勿做其他用途, 以維護智慧財產權
 本教材內容主要取自課本 Physics for Scientists and Engineers with Modern Physics 7th Edition. Jewett & Serway. 注意 本教材僅供教學使用, 勿做其他用途, 以維護智慧財產權 教材網址 : https://sites.google.com/site/ndhugp1 1 Chapter 15 Oscillatory Motion
本教材內容主要取自課本 Physics for Scientists and Engineers with Modern Physics 7th Edition. Jewett & Serway. 注意 本教材僅供教學使用, 勿做其他用途, 以維護智慧財產權 教材網址 : https://sites.google.com/site/ndhugp1 1 Chapter 15 Oscillatory Motion
OSCILLATIONS.
 OSCILLATIONS Periodic Motion and Oscillatory motion If a body repeats its motion along a certain path, about a fixed point, at a definite interval of time, it is said to have a periodic motion If a body
OSCILLATIONS Periodic Motion and Oscillatory motion If a body repeats its motion along a certain path, about a fixed point, at a definite interval of time, it is said to have a periodic motion If a body
The student will experimentally determine the parameters to represent the behavior of a damped oscillatory system of one degree of freedom.
 Practice 3 NAME STUDENT ID LAB GROUP PROFESSOR INSTRUCTOR Vibrations of systems of one degree of freedom with damping QUIZ 10% PARTICIPATION & PRESENTATION 5% INVESTIGATION 10% DESIGN PROBLEM 15% CALCULATIONS
Practice 3 NAME STUDENT ID LAB GROUP PROFESSOR INSTRUCTOR Vibrations of systems of one degree of freedom with damping QUIZ 10% PARTICIPATION & PRESENTATION 5% INVESTIGATION 10% DESIGN PROBLEM 15% CALCULATIONS
PHYSICS. Course Structure. Unit Topics Marks. Physical World and Measurement. 1 Physical World. 2 Units and Measurements.
 PHYSICS Course Structure Unit Topics Marks I Physical World and Measurement 1 Physical World 2 Units and Measurements II Kinematics 3 Motion in a Straight Line 23 4 Motion in a Plane III Laws of Motion
PHYSICS Course Structure Unit Topics Marks I Physical World and Measurement 1 Physical World 2 Units and Measurements II Kinematics 3 Motion in a Straight Line 23 4 Motion in a Plane III Laws of Motion
Measurement Techniques for Engineers. Motion and Vibration Measurement
 Measurement Techniques for Engineers Motion and Vibration Measurement Introduction Quantities that may need to be measured are velocity, acceleration and vibration amplitude Quantities useful in predicting
Measurement Techniques for Engineers Motion and Vibration Measurement Introduction Quantities that may need to be measured are velocity, acceleration and vibration amplitude Quantities useful in predicting
Oscillations. Phys101 Lectures 28, 29. Key points: Simple Harmonic Motion (SHM) SHM Related to Uniform Circular Motion The Simple Pendulum
 SHM Related to Uniform Circular Motion The Simple Pendulum") Phys101 Lectures 8, 9 Oscillations Key points: Simple Harmonic Motion (SHM) SHM Related to Uniform Circular Motion The Simple Pendulum Ref: 11-1,,3,4. Page 1 Oscillations of a Spring If an object oscillates
Phys101 Lectures 8, 9 Oscillations Key points: Simple Harmonic Motion (SHM) SHM Related to Uniform Circular Motion The Simple Pendulum Ref: 11-1,,3,4. Page 1 Oscillations of a Spring If an object oscillates
MODEL PAPER CLASS XI PHYSICS (GROUP 1) BLUEPRINT Name of chapter (1)
 BLUEPRINT Name of chapter (1)") sr. no. MODEL PAPER CLASS XI PHYSICS (GROUP ) BLUEPRINT Name of chapter VSAQ () SA-I (2) SA-II (3) Value based (4) LA(5) Total 70 Physical world and measurement 3 2 Kinematics 2 3,3 5 3 Laws of motion
sr. no. MODEL PAPER CLASS XI PHYSICS (GROUP ) BLUEPRINT Name of chapter VSAQ () SA-I (2) SA-II (3) Value based (4) LA(5) Total 70 Physical world and measurement 3 2 Kinematics 2 3,3 5 3 Laws of motion
Step 1: Mathematical Modeling
 083 Mechanical Vibrations Lesson Vibration Analysis Procedure The analysis of a vibrating system usually involves four steps: mathematical modeling derivation of the governing uations solution of the uations
083 Mechanical Vibrations Lesson Vibration Analysis Procedure The analysis of a vibrating system usually involves four steps: mathematical modeling derivation of the governing uations solution of the uations
not to be republished NCERT OSCILLATIONS Chapter Fourteen MCQ I π y = 3 cos 2ωt The displacement of a particle is represented by the equation
 Chapter Fourteen OSCILLATIONS MCQ I 14.1 The displacement of a particle is represented by the equation π y = 3 cos 2ωt 4. The motion of the particle is (a) simple harmonic with period 2p/w. (b) simple
Chapter Fourteen OSCILLATIONS MCQ I 14.1 The displacement of a particle is represented by the equation π y = 3 cos 2ωt 4. The motion of the particle is (a) simple harmonic with period 2p/w. (b) simple
Chapter 14 Oscillations. Copyright 2009 Pearson Education, Inc.
 Chapter 14 Oscillations 14-1 Oscillations of a Spring If an object vibrates or oscillates back and forth over the same path, each cycle taking the same amount of time, the motion is called periodic. The
Chapter 14 Oscillations 14-1 Oscillations of a Spring If an object vibrates or oscillates back and forth over the same path, each cycle taking the same amount of time, the motion is called periodic. The
STRESS STRAIN AND DEFORMATION OF SOLIDS, STATES OF STRESS
 1 UNIT I STRESS STRAIN AND DEFORMATION OF SOLIDS, STATES OF STRESS 1. Define: Stress When an external force acts on a body, it undergoes deformation. At the same time the body resists deformation. The
1 UNIT I STRESS STRAIN AND DEFORMATION OF SOLIDS, STATES OF STRESS 1. Define: Stress When an external force acts on a body, it undergoes deformation. At the same time the body resists deformation. The
OSCILLATIONS OF A SPRING-MASS SYSTEM AND A TORSIONAL PENDULUM
 EXPERIMENT Spring-Mass System and a Torsional Pendulum OSCILLATIONS OF A SPRING-MASS SYSTEM AND A TORSIONAL PENDULUM Structure.1 Introduction Objectives. Determination of Spring Constant Static Method
EXPERIMENT Spring-Mass System and a Torsional Pendulum OSCILLATIONS OF A SPRING-MASS SYSTEM AND A TORSIONAL PENDULUM Structure.1 Introduction Objectives. Determination of Spring Constant Static Method
Harmonic Oscillator. Mass-Spring Oscillator Resonance The Pendulum. Physics 109 Experiment Number 12
 Harmonic Oscillator Mass-Spring Oscillator Resonance The Pendulum Physics 109 Experiment Number 12 Outline Simple harmonic motion The vertical mass-spring system Driven oscillations and resonance The pendulum
Harmonic Oscillator Mass-Spring Oscillator Resonance The Pendulum Physics 109 Experiment Number 12 Outline Simple harmonic motion The vertical mass-spring system Driven oscillations and resonance The pendulum
Department of Mechanical Engineering ME6505- DYNAMICS OF MACHINES. Two Marks Question and answer UNIT I FORCE ANALYSIS AND FLYWHEELS
 Department of Mechanical Engineering ME6505- DYNAMICS OF MACHINES Two Marks Question and answer UNIT I FORCE ANALYSIS AND FLYWHEELS 1. Distinguish between space diagram and free body diagram Space Diagram
Department of Mechanical Engineering ME6505- DYNAMICS OF MACHINES Two Marks Question and answer UNIT I FORCE ANALYSIS AND FLYWHEELS 1. Distinguish between space diagram and free body diagram Space Diagram
Unit 2: Simple Harmonic Motion (SHM)
") Unit 2: Simple Harmonic Motion (SHM) THE MOST COMMON FORM OF MOTION FALL 2015 Objectives: Define SHM specifically and give an example. Write and apply formulas for finding the frequency f, period T, w
Unit 2: Simple Harmonic Motion (SHM) THE MOST COMMON FORM OF MOTION FALL 2015 Objectives: Define SHM specifically and give an example. Write and apply formulas for finding the frequency f, period T, w
Section 1 Simple Harmonic Motion. Chapter 11. Preview. Objectives Hooke s Law Sample Problem Simple Harmonic Motion The Simple Pendulum
 Section 1 Simple Harmonic Motion Preview Objectives Hooke s Law Sample Problem Simple Harmonic Motion The Simple Pendulum Section 1 Simple Harmonic Motion Objectives Identify the conditions of simple harmonic
Section 1 Simple Harmonic Motion Preview Objectives Hooke s Law Sample Problem Simple Harmonic Motion The Simple Pendulum Section 1 Simple Harmonic Motion Objectives Identify the conditions of simple harmonic
Fundamentals Physics. Chapter 15 Oscillations
 Fundamentals Physics Tenth Edition Halliday Chapter 15 Oscillations 15-1 Simple Harmonic Motion (1 of 20) Learning Objectives 15.01 Distinguish simple harmonic motion from other types of periodic motion.
Fundamentals Physics Tenth Edition Halliday Chapter 15 Oscillations 15-1 Simple Harmonic Motion (1 of 20) Learning Objectives 15.01 Distinguish simple harmonic motion from other types of periodic motion.
Energy Considerations
 Physics 42200 Waves & Oscillations Lecture 4 French, Chapter 3 Spring 2016 Semester Matthew Jones Energy Considerations The force in Hooke s law is = Potential energy can be used to describe conservative
Physics 42200 Waves & Oscillations Lecture 4 French, Chapter 3 Spring 2016 Semester Matthew Jones Energy Considerations The force in Hooke s law is = Potential energy can be used to describe conservative
Balancing of Masses. 1. Balancing of a Single Rotating Mass By a Single Mass Rotating in the Same Plane
 lecture - 1 Balancing of Masses Theory of Machine Balancing of Masses A car assembly line. In this chapter we shall discuss the balancing of unbalanced forces caused by rotating masses, in order to minimize
lecture - 1 Balancing of Masses Theory of Machine Balancing of Masses A car assembly line. In this chapter we shall discuss the balancing of unbalanced forces caused by rotating masses, in order to minimize
Physics 161 Lecture 17 Simple Harmonic Motion. October 30, 2018
 Physics 161 Lecture 17 Simple Harmonic Motion October 30, 2018 1 Lecture 17: learning objectives Review from lecture 16 - Second law of thermodynamics. - In pv cycle process: ΔU = 0, Q add = W by gass
Physics 161 Lecture 17 Simple Harmonic Motion October 30, 2018 1 Lecture 17: learning objectives Review from lecture 16 - Second law of thermodynamics. - In pv cycle process: ΔU = 0, Q add = W by gass
Oscillations and Waves
 Oscillations and Waves Oscillation: Wave: Examples of oscillations: 1. mass on spring (eg. bungee jumping) 2. pendulum (eg. swing) 3. object bobbing in water (eg. buoy, boat) 4. vibrating cantilever (eg.
Oscillations and Waves Oscillation: Wave: Examples of oscillations: 1. mass on spring (eg. bungee jumping) 2. pendulum (eg. swing) 3. object bobbing in water (eg. buoy, boat) 4. vibrating cantilever (eg.
Chapter 14 Oscillations
 Chapter 14 Oscillations If an object vibrates or oscillates back and forth over the same path, each cycle taking the same amount of time, the motion is called periodic. The mass and spring system is a
Chapter 14 Oscillations If an object vibrates or oscillates back and forth over the same path, each cycle taking the same amount of time, the motion is called periodic. The mass and spring system is a
D.A.V. PUBLIC SCHOOL, UPPAL S SOUTHEND, SECTOR 49, GURUGRAM CLASS XI (PHYSICS) Academic plan for
 Academic plan for") D.A.V. PUBLIC SCHOOL, UPPAL S SOUTHEND, SECTOR 49, GURUGRAM CLASS XI (PHYSICS) Academic plan for 2017-2018 UNIT NAME OF UNIT WEIGHTAGE 1. 2. 3. Physical World and Measurement Kinemetics Laws of Motion
D.A.V. PUBLIC SCHOOL, UPPAL S SOUTHEND, SECTOR 49, GURUGRAM CLASS XI (PHYSICS) Academic plan for 2017-2018 UNIT NAME OF UNIT WEIGHTAGE 1. 2. 3. Physical World and Measurement Kinemetics Laws of Motion
Good Vibes: Introduction to Oscillations
 Good Vibes: Introduction to Oscillations Description: Several conceptual and qualitative questions related to main characteristics of simple harmonic motion: amplitude, displacement, period, frequency,
Good Vibes: Introduction to Oscillations Description: Several conceptual and qualitative questions related to main characteristics of simple harmonic motion: amplitude, displacement, period, frequency,
CE6306 STRENGTH OF MATERIALS TWO MARK QUESTIONS WITH ANSWERS ACADEMIC YEAR
 CE6306 STRENGTH OF MATERIALS TWO MARK QUESTIONS WITH ANSWERS ACADEMIC YEAR 2014-2015 UNIT - 1 STRESS, STRAIN AND DEFORMATION OF SOLIDS PART- A 1. Define tensile stress and tensile strain. The stress induced
CE6306 STRENGTH OF MATERIALS TWO MARK QUESTIONS WITH ANSWERS ACADEMIC YEAR 2014-2015 UNIT - 1 STRESS, STRAIN AND DEFORMATION OF SOLIDS PART- A 1. Define tensile stress and tensile strain. The stress induced
Oscillations. Simple Harmonic Motion (SHM) Position, Velocity, Acceleration SHM Forces SHM Energy Period of oscillation Damping and Resonance
 Position, Velocity, Acceleration SHM Forces SHM Energy Period of oscillation Damping and Resonance") Oscillations Simple Harmonic Motion (SHM) Position, Velocity, Acceleration SHM Forces SHM Energy Period of oscillation Damping and Resonance 1 Revision problem Please try problem #31 on page 480 A pendulum
Oscillations Simple Harmonic Motion (SHM) Position, Velocity, Acceleration SHM Forces SHM Energy Period of oscillation Damping and Resonance 1 Revision problem Please try problem #31 on page 480 A pendulum
Use the following to answer question 1:
 Use the following to answer question 1: On an amusement park ride, passengers are seated in a horizontal circle of radius 7.5 m. The seats begin from rest and are uniformly accelerated for 21 seconds to
Use the following to answer question 1: On an amusement park ride, passengers are seated in a horizontal circle of radius 7.5 m. The seats begin from rest and are uniformly accelerated for 21 seconds to
Essential Physics I. Lecture 9:
 Essential Physics I E I Lecture 9: 15-06-15 Last lecture: review Conservation of momentum: p = m v p before = p after m 1 v 1,i + m 2 v 2,i = m 1 v 1,f + m 2 v 2,f m 1 m 1 m 2 m 2 Elastic collision: +
Essential Physics I E I Lecture 9: 15-06-15 Last lecture: review Conservation of momentum: p = m v p before = p after m 1 v 1,i + m 2 v 2,i = m 1 v 1,f + m 2 v 2,f m 1 m 1 m 2 m 2 Elastic collision: +
Introduction to Mechanical Vibration
 2103433 Introduction to Mechanical Vibration Nopdanai Ajavakom (NAV) 1 Course Topics Introduction to Vibration What is vibration? Basic concepts of vibration Modeling Linearization Single-Degree-of-Freedom
2103433 Introduction to Mechanical Vibration Nopdanai Ajavakom (NAV) 1 Course Topics Introduction to Vibration What is vibration? Basic concepts of vibration Modeling Linearization Single-Degree-of-Freedom
Mass on a Horizontal Spring
 Course- B.Sc. Applied Physical Science (Computer Science) Year- IInd, Sem- IVth Subject Physics Paper- XIVth, Electromagnetic Theory Lecture No. 22, Simple Harmonic Motion Introduction Hello friends in
Course- B.Sc. Applied Physical Science (Computer Science) Year- IInd, Sem- IVth Subject Physics Paper- XIVth, Electromagnetic Theory Lecture No. 22, Simple Harmonic Motion Introduction Hello friends in
g E. An object whose weight on 6 Earth is 5.0 N is dropped from rest above the Moon s surface. What is its momentum after falling for 3.0s?
 PhysicsndMathsTutor.com 1 1. Take the acceleration due to gravity, g E, as 10 m s on the surface of the Earth. The acceleration due to gravity on the surface of the Moon is g E. n object whose weight on
PhysicsndMathsTutor.com 1 1. Take the acceleration due to gravity, g E, as 10 m s on the surface of the Earth. The acceleration due to gravity on the surface of the Moon is g E. n object whose weight on
Wheel and Axle. Author: Joseph Harrison. Research Ans Aerospace Engineering 1 Expert, Monash University
 Wheel and Axle Author: Joseph Harrison British Middle-East Center for studies & Research info@bmcsr.com http:// bmcsr.com Research Ans Aerospace Engineering 1 Expert, Monash University Introduction A solid
Wheel and Axle Author: Joseph Harrison British Middle-East Center for studies & Research info@bmcsr.com http:// bmcsr.com Research Ans Aerospace Engineering 1 Expert, Monash University Introduction A solid
Torsion Spring Oscillator with Dry Friction
 Torsion Spring Oscillator with Dry Friction Manual Eugene Butikov Annotation. The manual includes a description of the simulated physical system and a summary of the relevant theoretical material for students
Torsion Spring Oscillator with Dry Friction Manual Eugene Butikov Annotation. The manual includes a description of the simulated physical system and a summary of the relevant theoretical material for students
You may use your books and notes. Moreover, you are encouraged to freely discuss the questions..which doesn't mean copying answers.
 Section: Oscillations Take-Home Test You may use your books and notes. Moreover, you are encouraged to freely discuss the questions..which doesn't mean copying answers. 1. In simple harmonic motion, the
Section: Oscillations Take-Home Test You may use your books and notes. Moreover, you are encouraged to freely discuss the questions..which doesn't mean copying answers. 1. In simple harmonic motion, the
Grade XI. Physics Exam Preparation Booklet. Chapter-wise Important Questions. #GrowWithGreen
 Grade XI Physics Exam Preparation Booklet Chapter-wise Important Questions #GrowWithGreen Units and Measurements Q1. After reading the physics book, Anamika recalled and noted down the expression for the
Grade XI Physics Exam Preparation Booklet Chapter-wise Important Questions #GrowWithGreen Units and Measurements Q1. After reading the physics book, Anamika recalled and noted down the expression for the
Sub. Code:
 Important Instructions to examiners: ) The answers should be examined by key words and not as word-to-word as given in the model answer scheme. ) The model answer and the answer written by candidate may
Important Instructions to examiners: ) The answers should be examined by key words and not as word-to-word as given in the model answer scheme. ) The model answer and the answer written by candidate may
Simple Harmonic Motion Test Tuesday 11/7
 Simple Harmonic Motion Test Tuesday 11/7 Chapter 11 Vibrations and Waves 1 If an object vibrates or oscillates back and forth over the same path, each cycle taking the same amount of time, the motion is
Simple Harmonic Motion Test Tuesday 11/7 Chapter 11 Vibrations and Waves 1 If an object vibrates or oscillates back and forth over the same path, each cycle taking the same amount of time, the motion is