INVERSE MODEL APPROACH TO DISTURBANCE REJECTION AND DECOUPLING CONTROLLER DESIGN. Leonid Lyubchyk
|
|
|
- Miles Thornton
- 5 years ago
- Views:
Transcription
1 CINVESTAV Department of Automatic Control November 3, 20 INVERSE MODEL APPROACH TO DISTURBANCE REJECTION AND DECOUPLING CONTROLLER DESIGN Leonid Lyubchyk National Technical University of Ukraine Kharkov Polytechnic Institute
2 2 CONTENTS Disturbance decoupling controller design problem UIO based disturbance observer design Structural synthesis Parametric synthesis Disturbance decoupling controller (DDC) design DDC existence conditions Structural singularity: DDC with fast filter Closed-loop system with DDC analysis
3 Methods of disturbance influence reduction Disturbance attenuation methods 3 - Methods LQ and LQG optimization, N. Wiener, R. Kalman - Methods H optimization, G. Zames, J. Doyle, B. Francis - Methods of invariant sets, F. Blanchini, A.B. Kurzhansky - Invariant ellipsoids technique, B.T. Polyak, A.S. Poznyak - liner matrix inequalities, S. Boyd Disturbance rejection methods - Feed-forward control, Jean-Victor Poncelet, Invariance theory, G.V. Shipanov, Combined control, A.G. Ivachnenko, Two channelship principle, B.N. Petrov, Disturbance observer, C. Johnson, 97 - Internal model control, B. Francis, W. Wonham, Disturbance absorption, Ya.Z. Tsypkin, 99
 min, u u and closed-loop system x Ax BF ( ym ) Nw will be stable.")
4 4 Disturbance rejection problem Plant (controlled object) x y Ax Cx, Bu y m Nw Mx Disturbance w w w c } Control law u F y ) w ( m { w Control process w y, performance index v ( y) Find control u u, so that v( y ) min, u u and closed-loop system x Ax BF ( ym ) Nw will be stable. v ( y ) 0 absolute invariance v ( y ) - invariance under the stability and robustness requirements Attainable level of disturbance rejection lim v( y ) v( y ) ( w, ), w w, { A, B, C}
5 Control structures for disturbance rejection 5 Feedback control Disturbance attenuation Feedback / feedforward control Disturbance compensation
6 Control system with disturbance observer structure 6
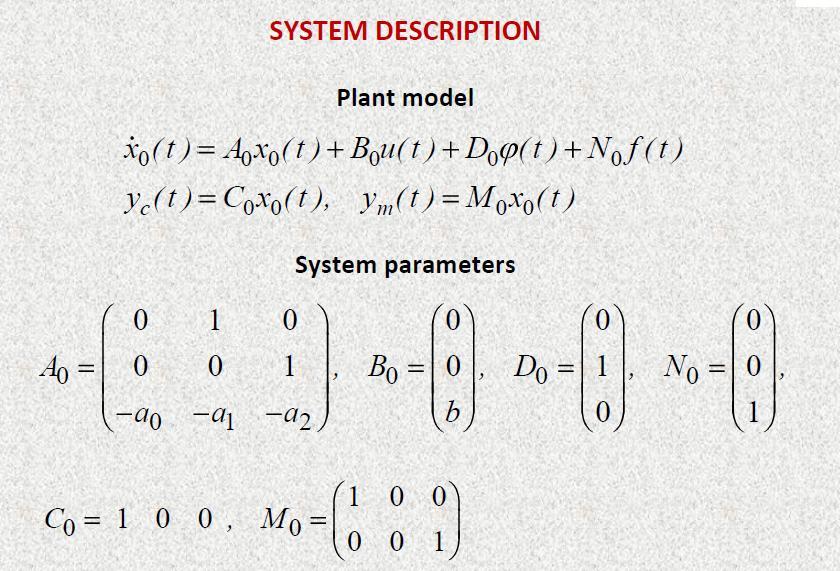
7 Output control problem 7 Consider a linear multivariable system described by the state-space model x( t ) Ax( t ) Bu( t ) Nf ( x( t ),t ), y ( t ) Cx( t ), y ( t ) Mx( t ), c m () q R - unknown distur- n m where x(t ) R - state vector, u(t ) R - control, f ( x(t ),t ) bance from certain class f ( x( t ),t ) = f, f c f x c f, 2 c r y ( t ) R, y m( t ) p R, - output controlled and measured variables respectively. We will assume that rank B m, rank C r, rank N q, rank M p. S ( ) CA B, Matrices CB S MN( 2 ) MA N are known as Markov parameters of system (). The integers, 2 are relative orders of control and disturbance transfer functions i.e. the minimal integers so that S CB( ) 0, S MN( 2 ) 0. 2
8 8 Output control problem Let the following assumptions take place: (a) rank B rank S ( ) r, CB (b) rank N rank S ( ) p. MN 2 (2) Without loss of generality for simplicity reason we will assume that 2 and use the notation S CB( ) S CB, S MN( ) S MN. The control problem is to find the control u( t ), depending from the measured variables, which ensure the reference signal reference model disturbances from certain class. Formally the control goal is * * y ( t ) tracking, which formed by the given y ( t ) A y ( t ) y ref ( t ) and disturbance f (( x ),t ) decoupling for all lim e (t ), t, where e c(t ) y (t ) y c(t ) - control error, constant. c * * - pre-established sufficiently small
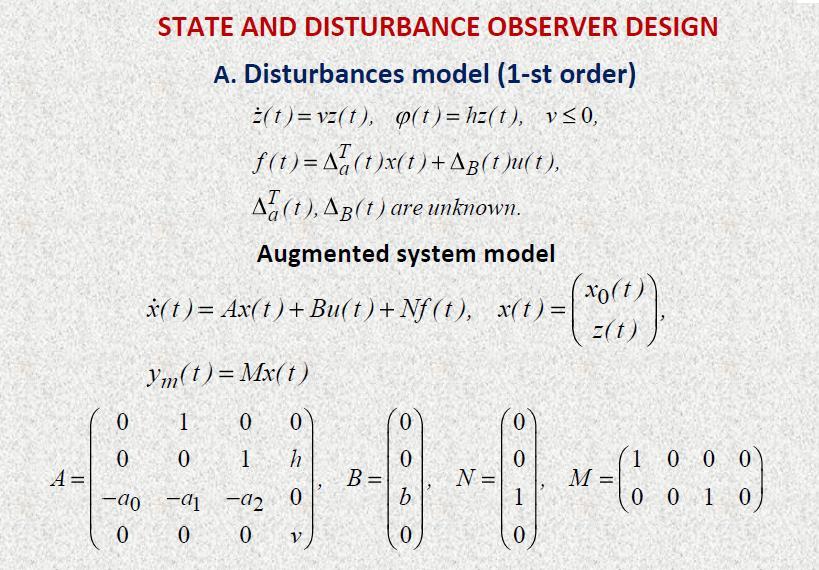
9 Inverse model based disturbance observer design 9 The first step of the DDC design procedure is the state and disturbance observer n p design using UIO approach. Let z(t ) Rx(t ) R be an aggregated auxiliary variables, where R is the appropriate aggregate matrix such as Then the state vector estimation may be obtained as follows T T rank M R n. y m z M R x, M R ( P Q), ˆx(t ) Py m(t ) Qx(t ) (3) where matrices n p n n p P R, Q R are defined as MP I, RQ I, PM QR I, p n p n MQ 0, RP 0. p,n p n p,p (4)
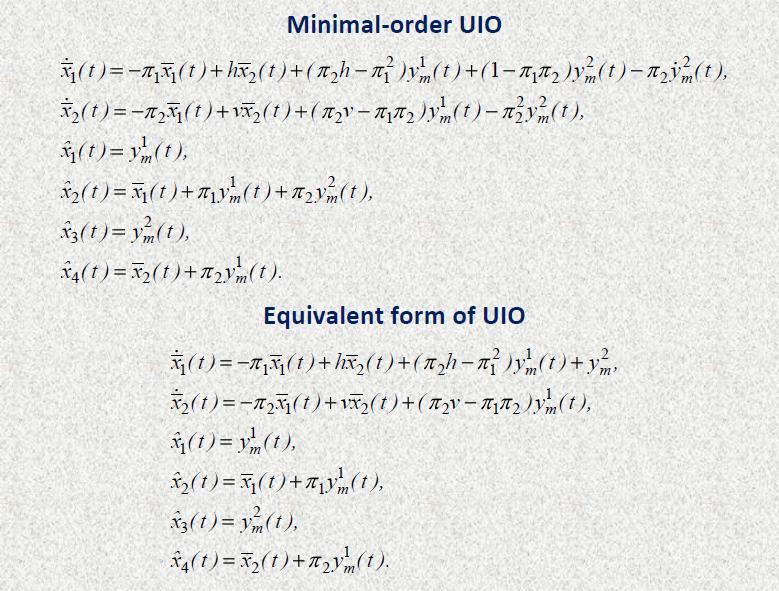
10 Unknown input observer. Structural synthesis 0 The aggregated vector estimation x( t ) is given by minimal-order UIO x( t ) Fx( t ) G y ( t ) Hy ( t ) G u( t ). (5) m m 0 The UIO parameters are determined from invariance conditions R HM A F R HM GM, RN HMN 0,G RB 0,G G FH. 0 (6) If assumption (2b) takes place, a solution of (5) may be obtained as F RΠ AQ, G RB, G RΠ AP, N 0 H RNS, Π I BS M, MN N n MN N (7)
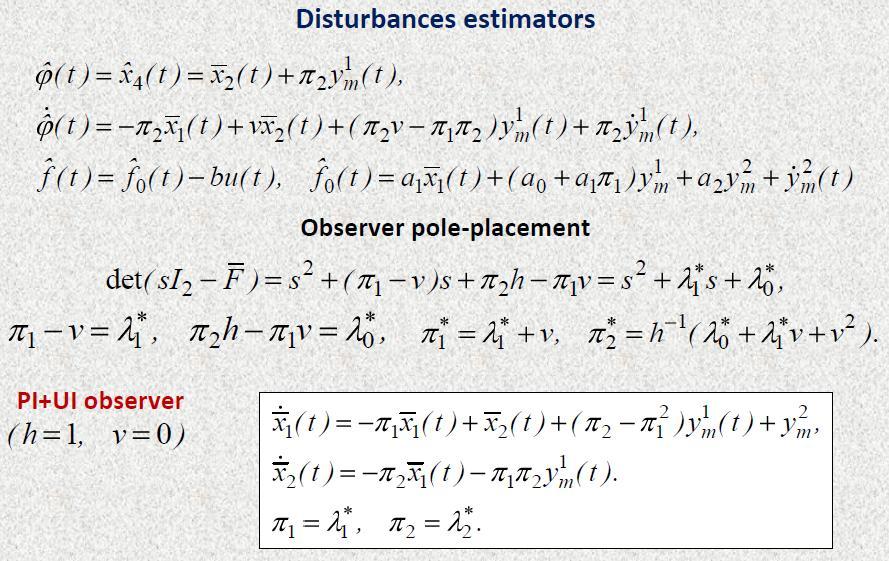
11 Inverse model-based disturbance observer Taking the unknown disturbance estimation in the form ˆ ˆ ˆ f ( t ) N x( t ) Ax( t ) Bu( t ). (8) The minimal-order state and disturbance observer (SDO) equation: x(t ) RΠN AQx(t ) RΠN APy m(t ) RNSMN y m(t ) RΠN Bu(t ), ˆf ( t ) C ( y ( t ) MAQx( t ) MAPy ( t ) S u( t )), N m m MB C S N PΩ. N MN N The estimation errors x e (t ) x(t ) x(t ˆ ), e ˆ f ( t ) f ( x,t ) f ( t ) (9) e ( t ) F R e ( t ), e ( t ) Qe ( t ), x x x x e ( t ) C MAQe ( t ). f N x (0)
12 Unknown input observer. Parametric synthesis Concretely define the matrices P I, Q, than with p 0 p,n p P Q P Q, P Q 2 2 R Q2 P2 I n p and P, Q 2 2 are arbitrary matrices with det Q 2 0. For system representation A A N A, M I, N A A N 2 p 0n p,p the observer dynamics matrix has the form: F R Q A P A Q, A A, A A N N A 2 N Ω I N N. N q p n p () (2)
13 Unknown input observer. Parametric synthesis 3 Thus the matrix Q 2 defines the similarity transformation and doesn t change the n p p spectrum of F R, which completely determined by arbitrary matrixp 2 R. The last may be choused by pole placement method if pair ( A 22,A 2) is observable. Such a condition is equivalent to the well-known UIO design solvability condition, namely observable of matrix pair ( Π, M ). The aggregate matrix R is determined up to an N arbitrary nonsingular matrix Q 2. F R) Q( A P A ) Q ( P2 Tuning parameters UIO pole placement Solvability conditions ( F( P * * * 2)) (... n p ) ( A 22, A 2 ) is observable
14 Regularized disturbance observer design 4 The observability condition is violated in the case when p q. Ω N 0 and F( R ) doesn t depend from P 2. At that In such singular case for the tuning properties guarantee it is possible to use the socalled regularized UIO, which ensure the appriximately invariance with respect the the unknown disturbance where 2 2 RN HCN H min (3) H 0 -regularization parameter. Then T T q MN MN N n H RNS I S S, Π I H M (4)
15 Regularized SDO design problem solution 5 F A P Ω A, A A N Ψ A, N 22 2 N N 2 T T q Ψ N I N N, T T T N q q q Ω I N N I N N I N N. (5) Estimation error equations for the regularized state and disturbance observer are the following: T x x q MN MN e ( t ) F e ( t ) RN I S S f ( x,t ), e ( t ) N PΩ H MAQe ( t ) f N N x T n q MN MN N I PM I S S f ( x,t ) and for small value of may be done sufficiently small. (6)
16 Disturbance compensator design 6 The disturbance compensative control is a function of reference signal and disturbance estimation in the form of TDF controller. In the usual case of square plant (r m ) under the assumption (2a) * u ( t ) S ( y ( t ) C x( t ) S ˆf ( t )), C A C CA. (7) CB ref Aˆ CN A If system structure non-singularity condition take place rank S m q, S m CB CN I S S S S I MN MB q (8) then disturbance estimation may be eliminated from the controller equation and DDC has the form of two-degree-of-freedom controller.
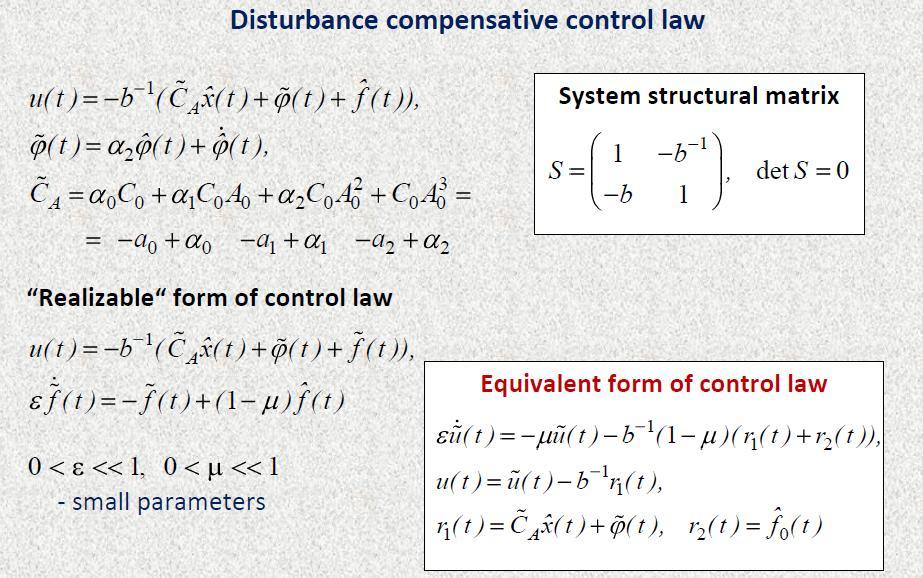
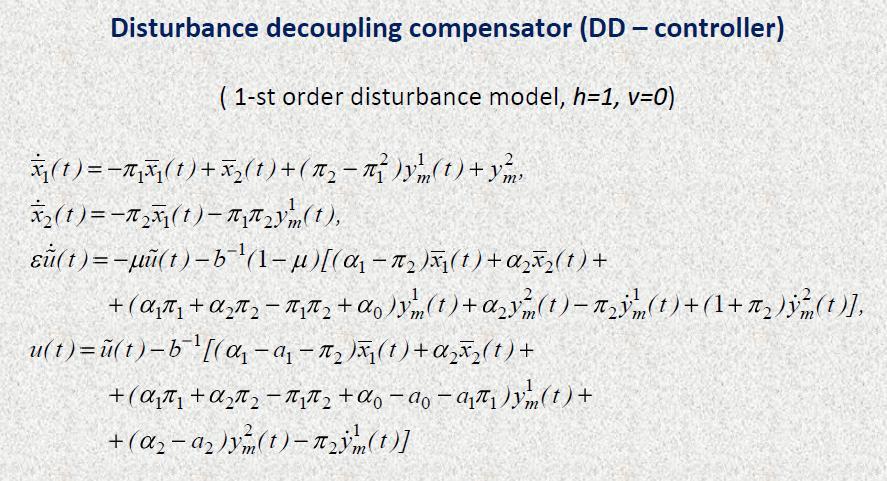
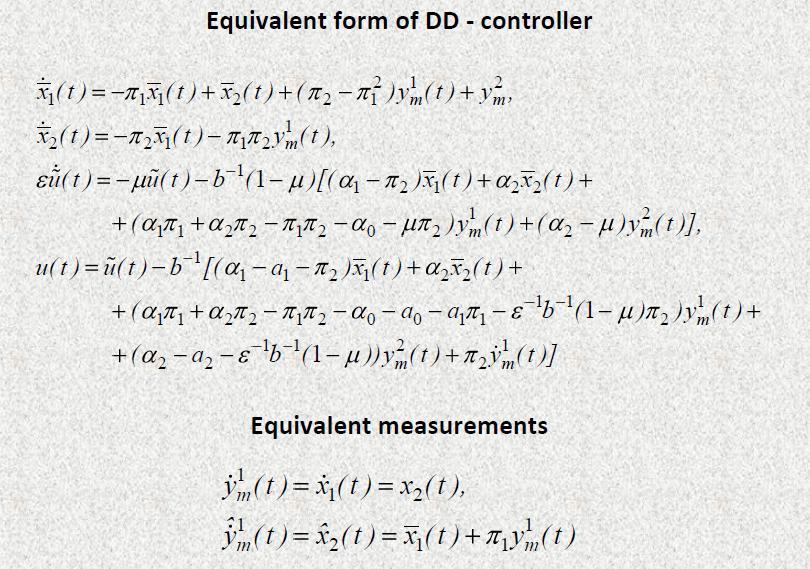
17 Disturbance decoupling controller design DDC equations are: S CN 0 0 N N N m N B ref CB ref A CB A N N m x( t ) F x( t ) RΠ A ( PΩ H )y ( t ) Π H y ( t ), (9) * det S ( C, B, N, M ) 0, u ( t ) S ( y ( t ) C Qx( t )) S C ( PΩ H )y ( t )), N B A B CB N MN F RΠ A Q, A A H C, H BS, H NS. det S ( C, B, N, M ) 0 The realizable controller may be obtained using the disturbance estimations dynamically transformed by the internal dynamic filter: * u ( t ) S CB( y ( t ) CAx( ˆ t ) SCN f ( t )) 0, 0 - small filter parameters (20) f ( t ) f ( t ) ( ) ˆf ( t ), DDC equations are: * u( t ) u( t ) ( )( ( t ) SCBS CN 2( t )), u ( t ) u( t ) ( t ), CB ref Aˆ 2 N m m ( t ) S ( y ( t ) C x( t )), ( t ) C ( y ( t ) MAQx( t ) MAPy ( t )). 0 7 (2)
18 Disturbance decoupling controller with fast filter structure 8
19 Closed-loop system with disturbance decoupling controller analysis 9 If system structural matrix S is nonsingular, the closed-loop system equation is: 0 0 x( t ) A x( t ) Π Nf ( t ) H y ( t ) Le ( t ), B B ref x A A H C Π A H A C, B A B B * (22) * The control goal is achieved with 0, if closed-loop system (22) is stable, e (t ) tends to zero due to properties of UIO. because x 0 For nonminimum-phase systems, matrix A is unstable. The problem of closedloop system stabilizing arises, moreover simple additional state feedback * ˆ u(t ) u (t ) Kx(t ) doesn t change closed-loop matrix spectrum because Π ( A BK ) 0. B In such a case the local optimal control method may be applied.
20 Local optimal control for disturbance rejection y ( t ) C Ax( ˆ t ) S u( t ) S ˆf ( t ) u( t ) min (23) ref A CB CN The corresponding control law is given by u * u ( t ) D y ( t ) C Ax( ˆ t ) S ˆf ( t ) ref A CN * T T CB m CB CB CB D S u ( t ), D I S S S, (24) From (23) the equation of closed-loop system follows 0 0 x( t ) A ( )x( t ) BD y ( t ) Π Nf ( x,t ) L e ( t ), B n A B ref B x A ( ) A BD C Π A BD A C, Π I BD C. * (25)
21 Closed-loop system properties 2 Using the combined control * ˆ u(t ) u (t ) Kx(t ) find that T 0 0 m CB CB A (,K ) A ( ) B K, B B I S S, Closed-loop system with combined control may be stabilized, if matrix pair A 0( ), B is controllable. The control error is given by * T * c c CB m CB CB e ( t ) A e ( t ) S I S S u ( t ) (26) and control goal is achieved with * ( ). Attainable accuracy of control
22 22 Closed-loop two-time-scale system For the structural singular plant closed-loop system with DDC includes internal filter Singular perturbation 0 x( t ) A x( t ) Nf ( x( t ),t ) H S f ( t ) H y ( t ) Le ( t ), B CN B ref x f ( t ) f ( t ) ( ) f ( x( t ),t ) ( )e ( t ) (27) f The closed-loop system (27) is two-time scale system, in which slow motion under 0 coincides with the process in the system with ideal DDC and the fast one satisfied the dynamic equation: 0 0 E( )x( t ) A x( t ) B f ( x( t )). (28) 0 0 B CN 0 In 0 A H S N E( ), A, B. 0 I 0 I ( )I m q,n q q
23 Robust decoupling controller design 23 Fast motion stability problem reduced to the absolute stability problem of system (28) with nonlinearities from certain class. For the particular case of linear state-dependent uncertain disturbance f ( x(t ),t ) Ax(t ), where A, A c A is the system () dynamic matrix perturbation 0 0 A N A HBSCN A ( A ) (29) ( ) A Iq and fast motion stability analysis reduced to the robust stability problem 0 Re ( A ( )) -, c. (30) A A A
24 Disturbance decoupling controller existence conditions 24 Invertability conditions (a) rank B rank S ( ) r, CB (b) rank N rank S ( ) p. MN 2 Structural nonsingularity conditions rank S m q, S m C S CB CN I S S I N MB q Input (strong) observability conditions det 0, Iq CN SMBSCBSCN NA, M is observable (detectable)
25 DD existence conditions extension 25
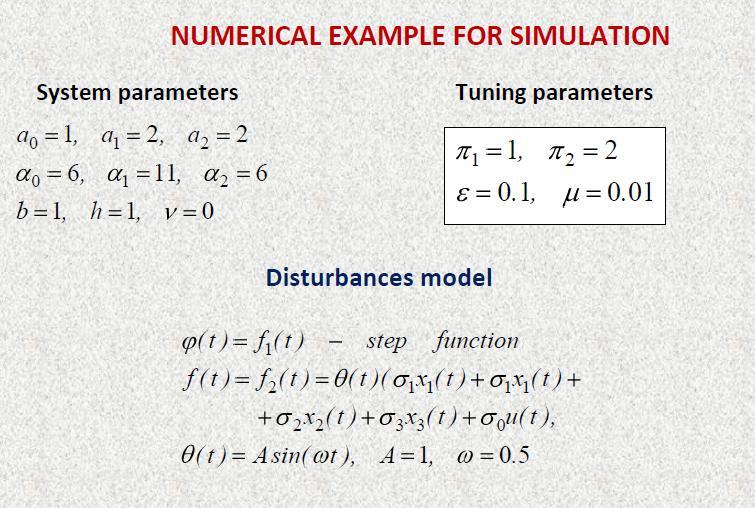
26 Example. Magnetic suspension disturbance rejection control Linearized mathematical model of the system x ( t ) x ( t ) 0 0 x 2( t ) 0 0 h x 2( t ) 0 0 u( t ) f 2( t ), x ( t ) a a a 0 x ( t ) b f ( t ) v f ( t ) c m m 3 y ( t ) x ( t ), y ( t ) x ( t ), y ( t ) x ( t ) where input f ( t) ( t) and state-dependent disturbances f 2 ( t) f ( x( t), u( t)), characterized the external forces and system's non-stationary parameters variations. 26 Control problem: using the measurements y m ( t) x( t), y m ( t) x3( t) find the control function u (t) so that the controlled output y c(t ) x (t ) (deviation from the desired position) tracks the signal, generated by reference model y (t ) 2y (t ) y (t ) 0y (t ) 0. 2
27 27
28 28
29 29
30 30
31 3
32 32
33 33
34 34

35 35 The designed DD controller has the structure of multivariable PI-controller with small parameters

36 PI controller Simulation results 36

37 Disturbance estimation by PI and UI observers 37

38 UIO based disturbance compensative controller 38
39 Disturbance decoupling controller 39

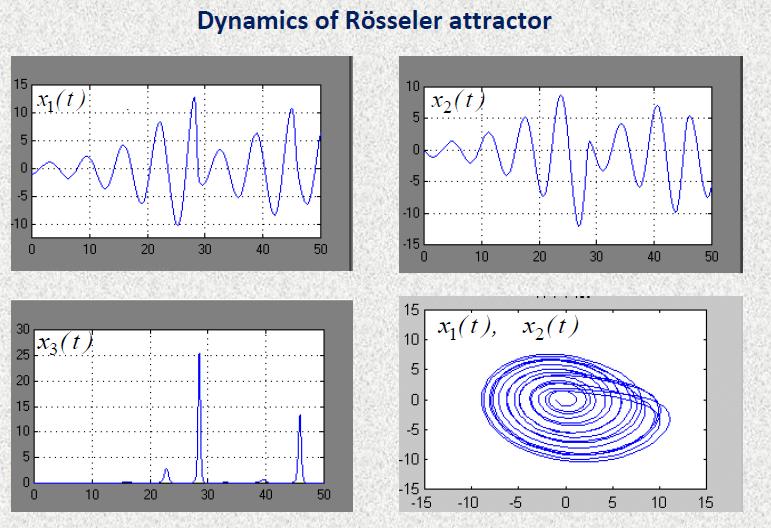
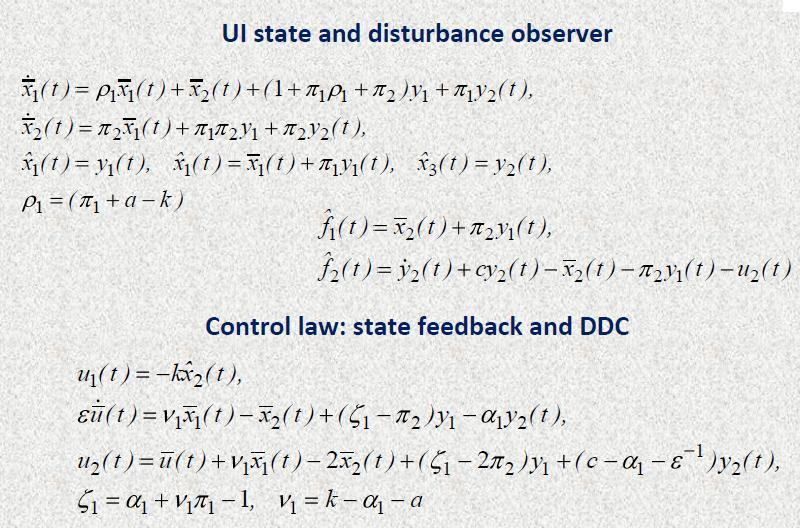
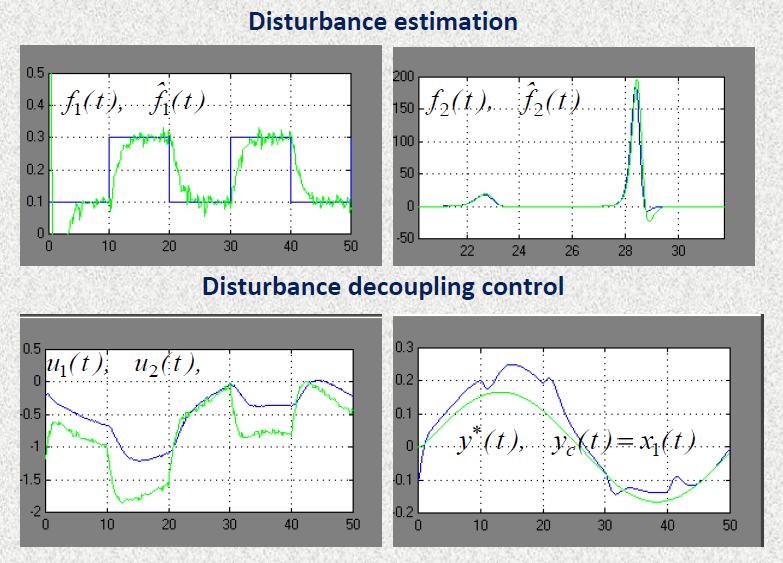
40 Example. Chaotic oscillator synchronisation 40
41 4
42 42
43 / 43
44 Conclusion 44 Disturbance decoupling compensator (DDC) design method for multivariable systems measurements is proposed using the UIO technique. The design procedure includes state and disturbance observer design and disturbance compensator design. If system structure non-singularity conditions take place, the disturbance estimation may be eliminated from the control law and DDC equations are obtained in the explicit form. For the case when such a conditions are violated the realizable form of the DDC should be included additional internal dynamic filter with small time constant. For two-time-scale closed-loop system if the fast motion is stable the slow one coincides with the processes in the system with ideal compensator.
45 Thank you for your attention! 45
Control Systems Design
 ELEC4410 Control Systems Design Lecture 18: State Feedback Tracking and State Estimation Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 18:
ELEC4410 Control Systems Design Lecture 18: State Feedback Tracking and State Estimation Julio H. Braslavsky julio@ee.newcastle.edu.au School of Electrical Engineering and Computer Science Lecture 18:
Design Methods for Control Systems
 Design Methods for Control Systems Maarten Steinbuch TU/e Gjerrit Meinsma UT Dutch Institute of Systems and Control Winter term 2002-2003 Schedule November 25 MSt December 2 MSt Homework # 1 December 9
Design Methods for Control Systems Maarten Steinbuch TU/e Gjerrit Meinsma UT Dutch Institute of Systems and Control Winter term 2002-2003 Schedule November 25 MSt December 2 MSt Homework # 1 December 9
Spectral factorization and H 2 -model following
 Spectral factorization and H 2 -model following Fabio Morbidi Department of Mechanical Engineering, Northwestern University, Evanston, IL, USA MTNS - July 5-9, 2010 F. Morbidi (Northwestern Univ.) MTNS
Spectral factorization and H 2 -model following Fabio Morbidi Department of Mechanical Engineering, Northwestern University, Evanston, IL, USA MTNS - July 5-9, 2010 F. Morbidi (Northwestern Univ.) MTNS
Chapter 3. LQ, LQG and Control System Design. Dutch Institute of Systems and Control
 Chapter 3 LQ, LQG and Control System H 2 Design Overview LQ optimization state feedback LQG optimization output feedback H 2 optimization non-stochastic version of LQG Application to feedback system design
Chapter 3 LQ, LQG and Control System H 2 Design Overview LQ optimization state feedback LQG optimization output feedback H 2 optimization non-stochastic version of LQG Application to feedback system design
LMIs for Observability and Observer Design
 LMIs for Observability and Observer Design Matthew M. Peet Arizona State University Lecture 06: LMIs for Observability and Observer Design Observability Consider a system with no input: ẋ(t) = Ax(t), x(0)
LMIs for Observability and Observer Design Matthew M. Peet Arizona State University Lecture 06: LMIs for Observability and Observer Design Observability Consider a system with no input: ẋ(t) = Ax(t), x(0)
EL 625 Lecture 10. Pole Placement and Observer Design. ẋ = Ax (1)
") EL 625 Lecture 0 EL 625 Lecture 0 Pole Placement and Observer Design Pole Placement Consider the system ẋ Ax () The solution to this system is x(t) e At x(0) (2) If the eigenvalues of A all lie in the
EL 625 Lecture 0 EL 625 Lecture 0 Pole Placement and Observer Design Pole Placement Consider the system ẋ Ax () The solution to this system is x(t) e At x(0) (2) If the eigenvalues of A all lie in the
Time-Invariant Linear Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 2015
 Time-Invariant Linear Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 15 Asymptotic approach from time-varying to constant gains Elimination of cross weighting
Time-Invariant Linear Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 15 Asymptotic approach from time-varying to constant gains Elimination of cross weighting
Discussion on: Measurable signal decoupling with dynamic feedforward compensation and unknown-input observation for systems with direct feedthrough
 Discussion on: Measurable signal decoupling with dynamic feedforward compensation and unknown-input observation for systems with direct feedthrough H.L. Trentelman 1 The geometric approach In the last
Discussion on: Measurable signal decoupling with dynamic feedforward compensation and unknown-input observation for systems with direct feedthrough H.L. Trentelman 1 The geometric approach In the last
Min-Max Output Integral Sliding Mode Control for Multiplant Linear Uncertain Systems
 Proceedings of the 27 American Control Conference Marriott Marquis Hotel at Times Square New York City, USA, July -3, 27 FrC.4 Min-Max Output Integral Sliding Mode Control for Multiplant Linear Uncertain
Proceedings of the 27 American Control Conference Marriott Marquis Hotel at Times Square New York City, USA, July -3, 27 FrC.4 Min-Max Output Integral Sliding Mode Control for Multiplant Linear Uncertain
D(s) G(s) A control system design definition
 G(s) A control system design definition") R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
TRACKING AND DISTURBANCE REJECTION
 TRACKING AND DISTURBANCE REJECTION Sadegh Bolouki Lecture slides for ECE 515 University of Illinois, Urbana-Champaign Fall 2016 S. Bolouki (UIUC) 1 / 13 General objective: The output to track a reference
TRACKING AND DISTURBANCE REJECTION Sadegh Bolouki Lecture slides for ECE 515 University of Illinois, Urbana-Champaign Fall 2016 S. Bolouki (UIUC) 1 / 13 General objective: The output to track a reference
Topic # Feedback Control Systems
 Topic #17 16.31 Feedback Control Systems Deterministic LQR Optimal control and the Riccati equation Weight Selection Fall 2007 16.31 17 1 Linear Quadratic Regulator (LQR) Have seen the solutions to the
Topic #17 16.31 Feedback Control Systems Deterministic LQR Optimal control and the Riccati equation Weight Selection Fall 2007 16.31 17 1 Linear Quadratic Regulator (LQR) Have seen the solutions to the
CONTROL DESIGN FOR SET POINT TRACKING
 Chapter 5 CONTROL DESIGN FOR SET POINT TRACKING In this chapter, we extend the pole placement, observer-based output feedback design to solve tracking problems. By tracking we mean that the output is commanded
Chapter 5 CONTROL DESIGN FOR SET POINT TRACKING In this chapter, we extend the pole placement, observer-based output feedback design to solve tracking problems. By tracking we mean that the output is commanded
Chap. 3. Controlled Systems, Controllability
 Chap. 3. Controlled Systems, Controllability 1. Controllability of Linear Systems 1.1. Kalman s Criterion Consider the linear system ẋ = Ax + Bu where x R n : state vector and u R m : input vector. A :
Chap. 3. Controlled Systems, Controllability 1. Controllability of Linear Systems 1.1. Kalman s Criterion Consider the linear system ẋ = Ax + Bu where x R n : state vector and u R m : input vector. A :
Time-Invariant Linear Quadratic Regulators!
 Time-Invariant Linear Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 17 Asymptotic approach from time-varying to constant gains Elimination of cross weighting
Time-Invariant Linear Quadratic Regulators Robert Stengel Optimal Control and Estimation MAE 546 Princeton University, 17 Asymptotic approach from time-varying to constant gains Elimination of cross weighting
Pole placement control: state space and polynomial approaches Lecture 2
 : state space and polynomial approaches Lecture 2 : a state O. Sename 1 1 Gipsa-lab, CNRS-INPG, FRANCE Olivier.Sename@gipsa-lab.fr www.gipsa-lab.fr/ o.sename -based November 21, 2017 Outline : a state
: state space and polynomial approaches Lecture 2 : a state O. Sename 1 1 Gipsa-lab, CNRS-INPG, FRANCE Olivier.Sename@gipsa-lab.fr www.gipsa-lab.fr/ o.sename -based November 21, 2017 Outline : a state
LQR, Kalman Filter, and LQG. Postgraduate Course, M.Sc. Electrical Engineering Department College of Engineering University of Salahaddin
 LQR, Kalman Filter, and LQG Postgraduate Course, M.Sc. Electrical Engineering Department College of Engineering University of Salahaddin May 2015 Linear Quadratic Regulator (LQR) Consider a linear system
LQR, Kalman Filter, and LQG Postgraduate Course, M.Sc. Electrical Engineering Department College of Engineering University of Salahaddin May 2015 Linear Quadratic Regulator (LQR) Consider a linear system
State Feedback and State Estimators Linear System Theory and Design, Chapter 8.
 1 Linear System Theory and Design, http://zitompul.wordpress.com 2 0 1 4 2 Homework 7: State Estimators (a) For the same system as discussed in previous slides, design another closed-loop state estimator,
1 Linear System Theory and Design, http://zitompul.wordpress.com 2 0 1 4 2 Homework 7: State Estimators (a) For the same system as discussed in previous slides, design another closed-loop state estimator,
Zeros and zero dynamics
 CHAPTER 4 Zeros and zero dynamics 41 Zero dynamics for SISO systems Consider a linear system defined by a strictly proper scalar transfer function that does not have any common zero and pole: g(s) =α p(s)
CHAPTER 4 Zeros and zero dynamics 41 Zero dynamics for SISO systems Consider a linear system defined by a strictly proper scalar transfer function that does not have any common zero and pole: g(s) =α p(s)
DESIGN OF ROBUST CONTROL SYSTEM FOR THE PMS MOTOR
 Journal of ELECTRICAL ENGINEERING, VOL 58, NO 6, 2007, 326 333 DESIGN OF ROBUST CONTROL SYSTEM FOR THE PMS MOTOR Ahmed Azaiz Youcef Ramdani Abdelkader Meroufel The field orientation control (FOC) consists
Journal of ELECTRICAL ENGINEERING, VOL 58, NO 6, 2007, 326 333 DESIGN OF ROBUST CONTROL SYSTEM FOR THE PMS MOTOR Ahmed Azaiz Youcef Ramdani Abdelkader Meroufel The field orientation control (FOC) consists
Every real system has uncertainties, which include system parametric uncertainties, unmodeled dynamics
 Sensitivity Analysis of Disturbance Accommodating Control with Kalman Filter Estimation Jemin George and John L. Crassidis University at Buffalo, State University of New York, Amherst, NY, 14-44 The design
Sensitivity Analysis of Disturbance Accommodating Control with Kalman Filter Estimation Jemin George and John L. Crassidis University at Buffalo, State University of New York, Amherst, NY, 14-44 The design
FINITE HORIZON ROBUST MODEL PREDICTIVE CONTROL USING LINEAR MATRIX INEQUALITIES. Danlei Chu, Tongwen Chen, Horacio J. Marquez
 FINITE HORIZON ROBUST MODEL PREDICTIVE CONTROL USING LINEAR MATRIX INEQUALITIES Danlei Chu Tongwen Chen Horacio J Marquez Department of Electrical and Computer Engineering University of Alberta Edmonton
FINITE HORIZON ROBUST MODEL PREDICTIVE CONTROL USING LINEAR MATRIX INEQUALITIES Danlei Chu Tongwen Chen Horacio J Marquez Department of Electrical and Computer Engineering University of Alberta Edmonton
and the nite horizon cost index with the nite terminal weighting matrix F > : N?1 X J(z r ; u; w) = [z(n)? z r (N)] T F [z(n)? z r (N)] + t= [kz? z r
![and the nite horizon cost index with the nite terminal weighting matrix F > : N?1 X J(z r ; u; w) = [z(n)? z r (N)] T F [z(n)? z r (N)] + t= [kz? z r](/thumbs/93/111826227.jpg "and the nite horizon cost index with the nite terminal weighting matrix F > : N?1 X J(z r ; u; w) = [z(n)? z r (N)] T F [z(n)? z r (N)] + t= [kz? z r") Intervalwise Receding Horizon H 1 -Tracking Control for Discrete Linear Periodic Systems Ki Baek Kim, Jae-Won Lee, Young Il. Lee, and Wook Hyun Kwon School of Electrical Engineering Seoul National University,
Intervalwise Receding Horizon H 1 -Tracking Control for Discrete Linear Periodic Systems Ki Baek Kim, Jae-Won Lee, Young Il. Lee, and Wook Hyun Kwon School of Electrical Engineering Seoul National University,
6.241 Dynamic Systems and Control
 6.241 Dynamic Systems and Control Lecture 24: H2 Synthesis Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology May 4, 2011 E. Frazzoli (MIT) Lecture 24: H 2 Synthesis May
6.241 Dynamic Systems and Control Lecture 24: H2 Synthesis Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology May 4, 2011 E. Frazzoli (MIT) Lecture 24: H 2 Synthesis May
Australian Journal of Basic and Applied Sciences, 3(4): , 2009 ISSN Modern Control Design of Power System
: , 2009 ISSN Modern Control Design of Power System") Australian Journal of Basic and Applied Sciences, 3(4): 4267-4273, 29 ISSN 99-878 Modern Control Design of Power System Atef Saleh Othman Al-Mashakbeh Tafila Technical University, Electrical Engineering
Australian Journal of Basic and Applied Sciences, 3(4): 4267-4273, 29 ISSN 99-878 Modern Control Design of Power System Atef Saleh Othman Al-Mashakbeh Tafila Technical University, Electrical Engineering
Fall 線性系統 Linear Systems. Chapter 08 State Feedback & State Estimators (SISO) Feng-Li Lian. NTU-EE Sep07 Jan08
 Feng-Li Lian. NTU-EE Sep07 Jan08") Fall 2007 線性系統 Linear Systems Chapter 08 State Feedback & State Estimators (SISO) Feng-Li Lian NTU-EE Sep07 Jan08 Materials used in these lecture notes are adopted from Linear System Theory & Design, 3rd.
Fall 2007 線性系統 Linear Systems Chapter 08 State Feedback & State Estimators (SISO) Feng-Li Lian NTU-EE Sep07 Jan08 Materials used in these lecture notes are adopted from Linear System Theory & Design, 3rd.
Synthesis of Controllers for Non-minimum Phase and Unstable Systems Using Non-sequential MIMO Quantitative Feedback Theory
 Synthesis of Controllers for Non-minimum Phase and Unstable Systems Using Non-sequential MIMO Quantitative Feedback Theory Chen-yang Lan Murray L Kerr Suhada Jayasuriya * Graduate Student Graduate Student
Synthesis of Controllers for Non-minimum Phase and Unstable Systems Using Non-sequential MIMO Quantitative Feedback Theory Chen-yang Lan Murray L Kerr Suhada Jayasuriya * Graduate Student Graduate Student
Problem Set 4 Solution 1
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Problem Set 4 Solution Problem 4. For the SISO feedback
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Problem Set 4 Solution Problem 4. For the SISO feedback
Problem Set 5 Solutions 1
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Problem Set 5 Solutions The problem set deals with Hankel
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Problem Set 5 Solutions The problem set deals with Hankel
1. Find the solution of the following uncontrolled linear system. 2 α 1 1
 Appendix B Revision Problems 1. Find the solution of the following uncontrolled linear system 0 1 1 ẋ = x, x(0) =. 2 3 1 Class test, August 1998 2. Given the linear system described by 2 α 1 1 ẋ = x +
Appendix B Revision Problems 1. Find the solution of the following uncontrolled linear system 0 1 1 ẋ = x, x(0) =. 2 3 1 Class test, August 1998 2. Given the linear system described by 2 α 1 1 ẋ = x +
Exam. 135 minutes, 15 minutes reading time
 Exam August 6, 208 Control Systems II (5-0590-00) Dr. Jacopo Tani Exam Exam Duration: 35 minutes, 5 minutes reading time Number of Problems: 35 Number of Points: 47 Permitted aids: 0 pages (5 sheets) A4.
Exam August 6, 208 Control Systems II (5-0590-00) Dr. Jacopo Tani Exam Exam Duration: 35 minutes, 5 minutes reading time Number of Problems: 35 Number of Points: 47 Permitted aids: 0 pages (5 sheets) A4.
Chapter 9 Observers, Model-based Controllers 9. Introduction In here we deal with the general case where only a subset of the states, or linear combin
 Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A. Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter 9 Observers,
Lectures on Dynamic Systems and Control Mohammed Dahleh Munther A. Dahleh George Verghese Department of Electrical Engineering and Computer Science Massachuasetts Institute of Technology c Chapter 9 Observers,
Lecture 7 : Generalized Plant and LFT form Dr.-Ing. Sudchai Boonto Assistant Professor
 Dr.-Ing. Sudchai Boonto Assistant Professor Department of Control System and Instrumentation Engineering King Mongkuts Unniversity of Technology Thonburi Thailand Linear Quadratic Gaussian The state space
Dr.-Ing. Sudchai Boonto Assistant Professor Department of Control System and Instrumentation Engineering King Mongkuts Unniversity of Technology Thonburi Thailand Linear Quadratic Gaussian The state space
SYSTEMTEORI - KALMAN FILTER VS LQ CONTROL
 SYSTEMTEORI - KALMAN FILTER VS LQ CONTROL 1. Optimal regulator with noisy measurement Consider the following system: ẋ = Ax + Bu + w, x(0) = x 0 where w(t) is white noise with Ew(t) = 0, and x 0 is a stochastic
SYSTEMTEORI - KALMAN FILTER VS LQ CONTROL 1. Optimal regulator with noisy measurement Consider the following system: ẋ = Ax + Bu + w, x(0) = x 0 where w(t) is white noise with Ew(t) = 0, and x 0 is a stochastic
Automatic Control II Computer exercise 3. LQG Design
 Uppsala University Information Technology Systems and Control HN,FS,KN 2000-10 Last revised by HR August 16, 2017 Automatic Control II Computer exercise 3 LQG Design Preparations: Read Chapters 5 and 9
Uppsala University Information Technology Systems and Control HN,FS,KN 2000-10 Last revised by HR August 16, 2017 Automatic Control II Computer exercise 3 LQG Design Preparations: Read Chapters 5 and 9
MIMO analysis: loop-at-a-time
 MIMO robustness MIMO analysis: loop-at-a-time y 1 y 2 P (s) + + K 2 (s) r 1 r 2 K 1 (s) Plant: P (s) = 1 s 2 + α 2 s α 2 α(s + 1) α(s + 1) s α 2. (take α = 10 in the following numerical analysis) Controller:
MIMO robustness MIMO analysis: loop-at-a-time y 1 y 2 P (s) + + K 2 (s) r 1 r 2 K 1 (s) Plant: P (s) = 1 s 2 + α 2 s α 2 α(s + 1) α(s + 1) s α 2. (take α = 10 in the following numerical analysis) Controller:
Integral action in state feedback control
 Automatic Control 1 in state feedback control Prof. Alberto Bemporad University of Trento Academic year 21-211 Prof. Alberto Bemporad (University of Trento) Automatic Control 1 Academic year 21-211 1 /
Automatic Control 1 in state feedback control Prof. Alberto Bemporad University of Trento Academic year 21-211 Prof. Alberto Bemporad (University of Trento) Automatic Control 1 Academic year 21-211 1 /
EEE582 Homework Problems
 EEE582 Homework Problems HW. Write a state-space realization of the linearized model for the cruise control system around speeds v = 4 (Section.3, http://tsakalis.faculty.asu.edu/notes/models.pdf). Use
EEE582 Homework Problems HW. Write a state-space realization of the linearized model for the cruise control system around speeds v = 4 (Section.3, http://tsakalis.faculty.asu.edu/notes/models.pdf). Use
3.1 Overview 3.2 Process and control-loop interactions
 3. Multivariable 3.1 Overview 3.2 and control-loop interactions 3.2.1 Interaction analysis 3.2.2 Closed-loop stability 3.3 Decoupling control 3.3.1 Basic design principle 3.3.2 Complete decoupling 3.3.3
3. Multivariable 3.1 Overview 3.2 and control-loop interactions 3.2.1 Interaction analysis 3.2.2 Closed-loop stability 3.3 Decoupling control 3.3.1 Basic design principle 3.3.2 Complete decoupling 3.3.3
Linear System Theory
 Linear System Theory Wonhee Kim Chapter 6: Controllability & Observability Chapter 7: Minimal Realizations May 2, 217 1 / 31 Recap State space equation Linear Algebra Solutions of LTI and LTV system Stability
Linear System Theory Wonhee Kim Chapter 6: Controllability & Observability Chapter 7: Minimal Realizations May 2, 217 1 / 31 Recap State space equation Linear Algebra Solutions of LTI and LTV system Stability
Static Output Feedback Stabilisation with H Performance for a Class of Plants
 Static Output Feedback Stabilisation with H Performance for a Class of Plants E. Prempain and I. Postlethwaite Control and Instrumentation Research, Department of Engineering, University of Leicester,
Static Output Feedback Stabilisation with H Performance for a Class of Plants E. Prempain and I. Postlethwaite Control and Instrumentation Research, Department of Engineering, University of Leicester,
EL2520 Control Theory and Practice
 EL2520 Control Theory and Practice Lecture 8: Linear quadratic control Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden Linear quadratic control Allows to compute the controller
EL2520 Control Theory and Practice Lecture 8: Linear quadratic control Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden Linear quadratic control Allows to compute the controller
Intro. Computer Control Systems: F8
 Intro. Computer Control Systems: F8 Properties of state-space descriptions and feedback Dave Zachariah Dept. Information Technology, Div. Systems and Control 1 / 22 dave.zachariah@it.uu.se F7: Quiz! 2
Intro. Computer Control Systems: F8 Properties of state-space descriptions and feedback Dave Zachariah Dept. Information Technology, Div. Systems and Control 1 / 22 dave.zachariah@it.uu.se F7: Quiz! 2
A Simple Derivation of Right Interactor for Tall Transfer Function Matrices and its Application to Inner-Outer Factorization Continuous-Time Case
 A Simple Derivation of Right Interactor for Tall Transfer Function Matrices and its Application to Inner-Outer Factorization Continuous-Time Case ATARU KASE Osaka Institute of Technology Department of
A Simple Derivation of Right Interactor for Tall Transfer Function Matrices and its Application to Inner-Outer Factorization Continuous-Time Case ATARU KASE Osaka Institute of Technology Department of
LINEAR QUADRATIC GAUSSIAN
 ECE553: Multivariable Control Systems II. LINEAR QUADRATIC GAUSSIAN.: Deriving LQG via separation principle We will now start to look at the design of controllers for systems Px.t/ D A.t/x.t/ C B u.t/u.t/
ECE553: Multivariable Control Systems II. LINEAR QUADRATIC GAUSSIAN.: Deriving LQG via separation principle We will now start to look at the design of controllers for systems Px.t/ D A.t/x.t/ C B u.t/u.t/
Comparison of four state observer design algorithms for MIMO system
 Archives of Control Sciences Volume 23(LIX), 2013 No. 2, pages 131 144 Comparison of four state observer design algorithms for MIMO system VINODH KUMAR. E, JOVITHA JEROME and S. AYYAPPAN A state observer
Archives of Control Sciences Volume 23(LIX), 2013 No. 2, pages 131 144 Comparison of four state observer design algorithms for MIMO system VINODH KUMAR. E, JOVITHA JEROME and S. AYYAPPAN A state observer
5. Observer-based Controller Design
 EE635 - Control System Theory 5. Observer-based Controller Design Jitkomut Songsiri state feedback pole-placement design regulation and tracking state observer feedback observer design LQR and LQG 5-1
EE635 - Control System Theory 5. Observer-based Controller Design Jitkomut Songsiri state feedback pole-placement design regulation and tracking state observer feedback observer design LQR and LQG 5-1
The disturbance decoupling problem (DDP)
") CHAPTER 3 The disturbance decoupling problem (DDP) Consider the system 3.1. Geometric formulation { ẋ = Ax + Bu + Ew y = Cx. Problem 3.1 (Disturbance decoupling). Find a state feedback u = Fx+ v such that
CHAPTER 3 The disturbance decoupling problem (DDP) Consider the system 3.1. Geometric formulation { ẋ = Ax + Bu + Ew y = Cx. Problem 3.1 (Disturbance decoupling). Find a state feedback u = Fx+ v such that
Linear Quadratic Gausssian Control Design with Loop Transfer Recovery
 Linear Quadratic Gausssian Control Design with Loop Transfer Recovery Leonid Freidovich Department of Mathematics Michigan State University MI 48824, USA e-mail:leonid@math.msu.edu http://www.math.msu.edu/
Linear Quadratic Gausssian Control Design with Loop Transfer Recovery Leonid Freidovich Department of Mathematics Michigan State University MI 48824, USA e-mail:leonid@math.msu.edu http://www.math.msu.edu/
Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents
 Navtech Part #s Volume 1 #1277 Volume 2 #1278 Volume 3 #1279 3 Volume Set #1280 Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents Volume 1 Preface Contents
Navtech Part #s Volume 1 #1277 Volume 2 #1278 Volume 3 #1279 3 Volume Set #1280 Stochastic Models, Estimation and Control Peter S. Maybeck Volumes 1, 2 & 3 Tables of Contents Volume 1 Preface Contents
Linear Quadratic Zero-Sum Two-Person Differential Games Pierre Bernhard June 15, 2013
 Linear Quadratic Zero-Sum Two-Person Differential Games Pierre Bernhard June 15, 2013 Abstract As in optimal control theory, linear quadratic (LQ) differential games (DG) can be solved, even in high dimension,
Linear Quadratic Zero-Sum Two-Person Differential Games Pierre Bernhard June 15, 2013 Abstract As in optimal control theory, linear quadratic (LQ) differential games (DG) can be solved, even in high dimension,
A Control Methodology for Constrained Linear Systems Based on Positive Invariance of Polyhedra
 A Control Methodology for Constrained Linear Systems Based on Positive Invariance of Polyhedra Jean-Claude HENNET LAAS-CNRS Toulouse, France Co-workers: Marina VASSILAKI University of Patras, GREECE Jean-Paul
A Control Methodology for Constrained Linear Systems Based on Positive Invariance of Polyhedra Jean-Claude HENNET LAAS-CNRS Toulouse, France Co-workers: Marina VASSILAKI University of Patras, GREECE Jean-Paul
Lifted approach to ILC/Repetitive Control
 Lifted approach to ILC/Repetitive Control Okko H. Bosgra Maarten Steinbuch TUD Delft Centre for Systems and Control TU/e Control System Technology Dutch Institute of Systems and Control DISC winter semester
Lifted approach to ILC/Repetitive Control Okko H. Bosgra Maarten Steinbuch TUD Delft Centre for Systems and Control TU/e Control System Technology Dutch Institute of Systems and Control DISC winter semester
Applications of Controlled Invariance to the l 1 Optimal Control Problem
 Applications of Controlled Invariance to the l 1 Optimal Control Problem Carlos E.T. Dórea and Jean-Claude Hennet LAAS-CNRS 7, Ave. du Colonel Roche, 31077 Toulouse Cédex 4, FRANCE Phone : (+33) 61 33
Applications of Controlled Invariance to the l 1 Optimal Control Problem Carlos E.T. Dórea and Jean-Claude Hennet LAAS-CNRS 7, Ave. du Colonel Roche, 31077 Toulouse Cédex 4, FRANCE Phone : (+33) 61 33
Output Regulation of Uncertain Nonlinear Systems with Nonlinear Exosystems
 Output Regulation of Uncertain Nonlinear Systems with Nonlinear Exosystems Zhengtao Ding Manchester School of Engineering, University of Manchester Oxford Road, Manchester M3 9PL, United Kingdom zhengtaoding@manacuk
Output Regulation of Uncertain Nonlinear Systems with Nonlinear Exosystems Zhengtao Ding Manchester School of Engineering, University of Manchester Oxford Road, Manchester M3 9PL, United Kingdom zhengtaoding@manacuk
INTEGRATED ARCHITECTURE OF ACTUATOR FAULT DIAGNOSIS AND ACCOMMODATION
 INTEGRATED ARCHITECTURE OF ACTUATOR FAULT DIAGNOSIS AND ACCOMMODATION Rim Hamdaoui, Safa Guesmi, Rafika Elharabi and Med Naceur Abdelkrim UR. Modelling, Analysis and Systems Control, University of Gabes,
INTEGRATED ARCHITECTURE OF ACTUATOR FAULT DIAGNOSIS AND ACCOMMODATION Rim Hamdaoui, Safa Guesmi, Rafika Elharabi and Med Naceur Abdelkrim UR. Modelling, Analysis and Systems Control, University of Gabes,
State Feedback and State Estimators Linear System Theory and Design, Chapter 8.
 1 Linear System Theory and Design, http://zitompul.wordpress.com 2 0 1 4 State Estimator In previous section, we have discussed the state feedback, based on the assumption that all state variables are
1 Linear System Theory and Design, http://zitompul.wordpress.com 2 0 1 4 State Estimator In previous section, we have discussed the state feedback, based on the assumption that all state variables are
Chapter 2. Classical Control System Design. Dutch Institute of Systems and Control
 Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Chapter 2 Classical Control System Design Overview Ch. 2. 2. Classical control system design Introduction Introduction Steady-state Steady-state errors errors Type Type k k systems systems Integral Integral
Nonlinear Observers. Jaime A. Moreno. Eléctrica y Computación Instituto de Ingeniería Universidad Nacional Autónoma de México
 Nonlinear Observers Jaime A. Moreno JMorenoP@ii.unam.mx Eléctrica y Computación Instituto de Ingeniería Universidad Nacional Autónoma de México XVI Congreso Latinoamericano de Control Automático October
Nonlinear Observers Jaime A. Moreno JMorenoP@ii.unam.mx Eléctrica y Computación Instituto de Ingeniería Universidad Nacional Autónoma de México XVI Congreso Latinoamericano de Control Automático October
PARAMETERIZATION OF STATE FEEDBACK GAINS FOR POLE PLACEMENT
 PARAMETERIZATION OF STATE FEEDBACK GAINS FOR POLE PLACEMENT Hans Norlander Systems and Control, Department of Information Technology Uppsala University P O Box 337 SE 75105 UPPSALA, Sweden HansNorlander@ituuse
PARAMETERIZATION OF STATE FEEDBACK GAINS FOR POLE PLACEMENT Hans Norlander Systems and Control, Department of Information Technology Uppsala University P O Box 337 SE 75105 UPPSALA, Sweden HansNorlander@ituuse
ẋ n = f n (x 1,...,x n,u 1,...,u m ) (5) y 1 = g 1 (x 1,...,x n,u 1,...,u m ) (6) y p = g p (x 1,...,x n,u 1,...,u m ) (7)
 (5) y 1 = g 1 (x 1,...,x n,u 1,...,u m ) (6) y p = g p (x 1,...,x n,u 1,...,u m ) (7)") EEE582 Topical Outline A.A. Rodriguez Fall 2007 GWC 352, 965-3712 The following represents a detailed topical outline of the course. It attempts to highlight most of the key concepts to be covered and
EEE582 Topical Outline A.A. Rodriguez Fall 2007 GWC 352, 965-3712 The following represents a detailed topical outline of the course. It attempts to highlight most of the key concepts to be covered and
Partial Eigenvalue Assignment in Linear Systems: Existence, Uniqueness and Numerical Solution
 Partial Eigenvalue Assignment in Linear Systems: Existence, Uniqueness and Numerical Solution Biswa N. Datta, IEEE Fellow Department of Mathematics Northern Illinois University DeKalb, IL, 60115 USA e-mail:
Partial Eigenvalue Assignment in Linear Systems: Existence, Uniqueness and Numerical Solution Biswa N. Datta, IEEE Fellow Department of Mathematics Northern Illinois University DeKalb, IL, 60115 USA e-mail:
Stability, Pole Placement, Observers and Stabilization
 Stability, Pole Placement, Observers and Stabilization 1 1, The Netherlands DISC Course Mathematical Models of Systems Outline 1 Stability of autonomous systems 2 The pole placement problem 3 Stabilization
Stability, Pole Placement, Observers and Stabilization 1 1, The Netherlands DISC Course Mathematical Models of Systems Outline 1 Stability of autonomous systems 2 The pole placement problem 3 Stabilization
Output Adaptive Model Reference Control of Linear Continuous State-Delay Plant
 Output Adaptive Model Reference Control of Linear Continuous State-Delay Plant Boris M. Mirkin and Per-Olof Gutman Faculty of Agricultural Engineering Technion Israel Institute of Technology Haifa 3, Israel
Output Adaptive Model Reference Control of Linear Continuous State-Delay Plant Boris M. Mirkin and Per-Olof Gutman Faculty of Agricultural Engineering Technion Israel Institute of Technology Haifa 3, Israel
H-Infinity Controller Design for a Continuous Stirred Tank Reactor
 International Journal of Electronic and Electrical Engineering. ISSN 974-2174 Volume 7, Number 8 (214), pp. 767-772 International Research Publication House http://www.irphouse.com H-Infinity Controller
International Journal of Electronic and Electrical Engineering. ISSN 974-2174 Volume 7, Number 8 (214), pp. 767-772 International Research Publication House http://www.irphouse.com H-Infinity Controller
SUCCESSIVE POLE SHIFTING USING SAMPLED-DATA LQ REGULATORS. Sigeru Omatu
 SUCCESSIVE POLE SHIFING USING SAMPLED-DAA LQ REGULAORS oru Fujinaka Sigeru Omatu Graduate School of Engineering, Osaka Prefecture University, 1-1 Gakuen-cho, Sakai, 599-8531 Japan Abstract: Design of sampled-data
SUCCESSIVE POLE SHIFING USING SAMPLED-DAA LQ REGULAORS oru Fujinaka Sigeru Omatu Graduate School of Engineering, Osaka Prefecture University, 1-1 Gakuen-cho, Sakai, 599-8531 Japan Abstract: Design of sampled-data
The parameterization of all. of all two-degree-of-freedom strongly stabilizing controllers
 The parameterization stabilizing controllers 89 The parameterization of all two-degree-of-freedom strongly stabilizing controllers Tatsuya Hoshikawa, Kou Yamada 2, Yuko Tatsumi 3, Non-members ABSTRACT
The parameterization stabilizing controllers 89 The parameterization of all two-degree-of-freedom strongly stabilizing controllers Tatsuya Hoshikawa, Kou Yamada 2, Yuko Tatsumi 3, Non-members ABSTRACT
ROBUST PASSIVE OBSERVER-BASED CONTROL FOR A CLASS OF SINGULAR SYSTEMS
 INTERNATIONAL JOURNAL OF INFORMATON AND SYSTEMS SCIENCES Volume 5 Number 3-4 Pages 480 487 c 2009 Institute for Scientific Computing and Information ROBUST PASSIVE OBSERVER-BASED CONTROL FOR A CLASS OF
INTERNATIONAL JOURNAL OF INFORMATON AND SYSTEMS SCIENCES Volume 5 Number 3-4 Pages 480 487 c 2009 Institute for Scientific Computing and Information ROBUST PASSIVE OBSERVER-BASED CONTROL FOR A CLASS OF
Multivariable MRAC with State Feedback for Output Tracking
 29 American Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June 1-12, 29 WeA18.5 Multivariable MRAC with State Feedback for Output Tracking Jiaxing Guo, Yu Liu and Gang Tao Department
29 American Control Conference Hyatt Regency Riverfront, St. Louis, MO, USA June 1-12, 29 WeA18.5 Multivariable MRAC with State Feedback for Output Tracking Jiaxing Guo, Yu Liu and Gang Tao Department
Robust Internal Model Control for Impulse Elimination of Singular Systems
 International Journal of Control Science and Engineering ; (): -7 DOI:.59/j.control.. Robust Internal Model Control for Impulse Elimination of Singular Systems M. M. Share Pasandand *, H. D. Taghirad Department
International Journal of Control Science and Engineering ; (): -7 DOI:.59/j.control.. Robust Internal Model Control for Impulse Elimination of Singular Systems M. M. Share Pasandand *, H. D. Taghirad Department
QFT Framework for Robust Tuning of Power System Stabilizers
 45-E-PSS-75 QFT Framework for Robust Tuning of Power System Stabilizers Seyyed Mohammad Mahdi Alavi, Roozbeh Izadi-Zamanabadi Department of Control Engineering, Aalborg University, Denmark Correspondence
45-E-PSS-75 QFT Framework for Robust Tuning of Power System Stabilizers Seyyed Mohammad Mahdi Alavi, Roozbeh Izadi-Zamanabadi Department of Control Engineering, Aalborg University, Denmark Correspondence
Optimization problems on the rank and inertia of the Hermitian matrix expression A BX (BX) with applications
 with applications") Optimization problems on the rank and inertia of the Hermitian matrix expression A BX (BX) with applications Yongge Tian China Economics and Management Academy, Central University of Finance and Economics,
Optimization problems on the rank and inertia of the Hermitian matrix expression A BX (BX) with applications Yongge Tian China Economics and Management Academy, Central University of Finance and Economics,
A Necessary and Sufficient Condition for High-Frequency Robustness of Non-Strictly-Proper Feedback Systems
 A Necessary and Sufficient Condition for High-Frequency Robustness of Non-Strictly-Proper Feedback Systems Daniel Cobb Department of Electrical Engineering University of Wisconsin Madison WI 53706-1691
A Necessary and Sufficient Condition for High-Frequency Robustness of Non-Strictly-Proper Feedback Systems Daniel Cobb Department of Electrical Engineering University of Wisconsin Madison WI 53706-1691
Modeling and Analysis of Dynamic Systems
 Modeling and Analysis of Dynamic Systems by Dr. Guillaume Ducard Fall 2016 Institute for Dynamic Systems and Control ETH Zurich, Switzerland based on script from: Prof. Dr. Lino Guzzella 1/33 Outline 1
Modeling and Analysis of Dynamic Systems by Dr. Guillaume Ducard Fall 2016 Institute for Dynamic Systems and Control ETH Zurich, Switzerland based on script from: Prof. Dr. Lino Guzzella 1/33 Outline 1
Course on Model Predictive Control Part II Linear MPC design
 Course on Model Predictive Control Part II Linear MPC design Gabriele Pannocchia Department of Chemical Engineering, University of Pisa, Italy Email: g.pannocchia@diccism.unipi.it Facoltà di Ingegneria,
Course on Model Predictive Control Part II Linear MPC design Gabriele Pannocchia Department of Chemical Engineering, University of Pisa, Italy Email: g.pannocchia@diccism.unipi.it Facoltà di Ingegneria,
Theory in Model Predictive Control :" Constraint Satisfaction and Stability!
 Theory in Model Predictive Control :" Constraint Satisfaction and Stability Colin Jones, Melanie Zeilinger Automatic Control Laboratory, EPFL Example: Cessna Citation Aircraft Linearized continuous-time
Theory in Model Predictive Control :" Constraint Satisfaction and Stability Colin Jones, Melanie Zeilinger Automatic Control Laboratory, EPFL Example: Cessna Citation Aircraft Linearized continuous-time
Massachusetts Institute of Technology. Department of Electrical Engineering and Computer Science : MULTIVARIABLE CONTROL SYSTEMS by A.
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Q-Parameterization 1 This lecture introduces the so-called
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Q-Parameterization 1 This lecture introduces the so-called
Research Article State-PID Feedback for Pole Placement of LTI Systems
 Mathematical Problems in Engineering Volume 211, Article ID 92943, 2 pages doi:1.1155/211/92943 Research Article State-PID Feedback for Pole Placement of LTI Systems Sarawut Sujitjorn and Witchupong Wiboonjaroen
Mathematical Problems in Engineering Volume 211, Article ID 92943, 2 pages doi:1.1155/211/92943 Research Article State-PID Feedback for Pole Placement of LTI Systems Sarawut Sujitjorn and Witchupong Wiboonjaroen
LQ Control of a Two Wheeled Inverted Pendulum Process
 Uppsala University Information Technology Dept. of Systems and Control KN,HN,FS 2000-10 Last rev. September 12, 2017 by HR Reglerteknik II Instruction to the laboratory work LQ Control of a Two Wheeled
Uppsala University Information Technology Dept. of Systems and Control KN,HN,FS 2000-10 Last rev. September 12, 2017 by HR Reglerteknik II Instruction to the laboratory work LQ Control of a Two Wheeled
State Regulator. Advanced Control. design of controllers using pole placement and LQ design rules
 Advanced Control State Regulator Scope design of controllers using pole placement and LQ design rules Keywords pole placement, optimal control, LQ regulator, weighting matrixes Prerequisites Contact state
Advanced Control State Regulator Scope design of controllers using pole placement and LQ design rules Keywords pole placement, optimal control, LQ regulator, weighting matrixes Prerequisites Contact state
Internal Model Control of A Class of Continuous Linear Underactuated Systems
 Internal Model Control of A Class of Continuous Linear Underactuated Systems Asma Mezzi Tunis El Manar University, Automatic Control Research Laboratory, LA.R.A, National Engineering School of Tunis (ENIT),
Internal Model Control of A Class of Continuous Linear Underactuated Systems Asma Mezzi Tunis El Manar University, Automatic Control Research Laboratory, LA.R.A, National Engineering School of Tunis (ENIT),
Lecture 9. Introduction to Kalman Filtering. Linear Quadratic Gaussian Control (LQG) G. Hovland 2004
 G. Hovland 2004") MER42 Advanced Control Lecture 9 Introduction to Kalman Filtering Linear Quadratic Gaussian Control (LQG) G. Hovland 24 Announcement No tutorials on hursday mornings 8-9am I will be present in all practical
MER42 Advanced Control Lecture 9 Introduction to Kalman Filtering Linear Quadratic Gaussian Control (LQG) G. Hovland 24 Announcement No tutorials on hursday mornings 8-9am I will be present in all practical
FRTN 15 Predictive Control
 Department of AUTOMATIC CONTROL FRTN 5 Predictive Control Final Exam March 4, 27, 8am - 3pm General Instructions This is an open book exam. You may use any book you want, including the slides from the
Department of AUTOMATIC CONTROL FRTN 5 Predictive Control Final Exam March 4, 27, 8am - 3pm General Instructions This is an open book exam. You may use any book you want, including the slides from the
Iterative Learning Control Analysis and Design I
 Iterative Learning Control Analysis and Design I Electronics and Computer Science University of Southampton Southampton, SO17 1BJ, UK etar@ecs.soton.ac.uk http://www.ecs.soton.ac.uk/ Contents Basics Representations
Iterative Learning Control Analysis and Design I Electronics and Computer Science University of Southampton Southampton, SO17 1BJ, UK etar@ecs.soton.ac.uk http://www.ecs.soton.ac.uk/ Contents Basics Representations
Recent Advances in Positive Systems: The Servomechanism Problem
 Recent Advances in Positive Systems: The Servomechanism Problem 47 th IEEE Conference on Decision and Control December 28. Bartek Roszak and Edward J. Davison Systems Control Group, University of Toronto
Recent Advances in Positive Systems: The Servomechanism Problem 47 th IEEE Conference on Decision and Control December 28. Bartek Roszak and Edward J. Davison Systems Control Group, University of Toronto
Prashant Mhaskar, Nael H. El-Farra & Panagiotis D. Christofides. Department of Chemical Engineering University of California, Los Angeles
 HYBRID PREDICTIVE OUTPUT FEEDBACK STABILIZATION OF CONSTRAINED LINEAR SYSTEMS Prashant Mhaskar, Nael H. El-Farra & Panagiotis D. Christofides Department of Chemical Engineering University of California,
HYBRID PREDICTIVE OUTPUT FEEDBACK STABILIZATION OF CONSTRAINED LINEAR SYSTEMS Prashant Mhaskar, Nael H. El-Farra & Panagiotis D. Christofides Department of Chemical Engineering University of California,
MODERN CONTROL DESIGN
 CHAPTER 8 MODERN CONTROL DESIGN The classical design techniques of Chapters 6 and 7 are based on the root-locus and frequency response that utilize only the plant output for feedback with a dynamic controller
CHAPTER 8 MODERN CONTROL DESIGN The classical design techniques of Chapters 6 and 7 are based on the root-locus and frequency response that utilize only the plant output for feedback with a dynamic controller
Multi-Model Adaptive Regulation for a Family of Systems Containing Different Zero Structures
 Preprints of the 19th World Congress The International Federation of Automatic Control Multi-Model Adaptive Regulation for a Family of Systems Containing Different Zero Structures Eric Peterson Harry G.
Preprints of the 19th World Congress The International Federation of Automatic Control Multi-Model Adaptive Regulation for a Family of Systems Containing Different Zero Structures Eric Peterson Harry G.
Output Regulation of the Tigan System
 Output Regulation of the Tigan System Dr. V. Sundarapandian Professor (Systems & Control Eng.), Research and Development Centre Vel Tech Dr. RR & Dr. SR Technical University Avadi, Chennai-6 6, Tamil Nadu,
Output Regulation of the Tigan System Dr. V. Sundarapandian Professor (Systems & Control Eng.), Research and Development Centre Vel Tech Dr. RR & Dr. SR Technical University Avadi, Chennai-6 6, Tamil Nadu,
Linear State Feedback Controller Design
 Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Assignment For EE5101 - Linear Systems Sem I AY2010/2011 Linear State Feedback Controller Design Phang Swee King A0033585A Email: king@nus.edu.sg NGS/ECE Dept. Faculty of Engineering National University
Control of Electromechanical Systems
 Control of Electromechanical Systems November 3, 27 Exercise Consider the feedback control scheme of the motor speed ω in Fig., where the torque actuation includes a time constant τ A =. s and a disturbance
Control of Electromechanical Systems November 3, 27 Exercise Consider the feedback control scheme of the motor speed ω in Fig., where the torque actuation includes a time constant τ A =. s and a disturbance
AN OPTIMIZATION-BASED APPROACH FOR QUASI-NONINTERACTING CONTROL. Jose M. Araujo, Alexandre C. Castro and Eduardo T. F. Santos
 ICIC Express Letters ICIC International c 2008 ISSN 1881-803X Volume 2, Number 4, December 2008 pp. 395 399 AN OPTIMIZATION-BASED APPROACH FOR QUASI-NONINTERACTING CONTROL Jose M. Araujo, Alexandre C.
ICIC Express Letters ICIC International c 2008 ISSN 1881-803X Volume 2, Number 4, December 2008 pp. 395 399 AN OPTIMIZATION-BASED APPROACH FOR QUASI-NONINTERACTING CONTROL Jose M. Araujo, Alexandre C.
Unit 11 - Week 7: Quantitative feedback theory (Part 1/2)
") X reviewer3@nptel.iitm.ac.in Courses» Control System Design Announcements Course Ask a Question Progress Mentor FAQ Unit 11 - Week 7: Quantitative feedback theory (Part 1/2) Course outline How to access
X reviewer3@nptel.iitm.ac.in Courses» Control System Design Announcements Course Ask a Question Progress Mentor FAQ Unit 11 - Week 7: Quantitative feedback theory (Part 1/2) Course outline How to access
High-Gain Observers in Nonlinear Feedback Control. Lecture # 2 Separation Principle
 High-Gain Observers in Nonlinear Feedback Control Lecture # 2 Separation Principle High-Gain ObserversinNonlinear Feedback ControlLecture # 2Separation Principle p. 1/4 The Class of Systems ẋ = Ax + Bφ(x,
High-Gain Observers in Nonlinear Feedback Control Lecture # 2 Separation Principle High-Gain ObserversinNonlinear Feedback ControlLecture # 2Separation Principle p. 1/4 The Class of Systems ẋ = Ax + Bφ(x,
Lecture 2 and 3: Controllability of DT-LTI systems
 1 Lecture 2 and 3: Controllability of DT-LTI systems Spring 2013 - EE 194, Advanced Control (Prof Khan) January 23 (Wed) and 28 (Mon), 2013 I LTI SYSTEMS Recall that continuous-time LTI systems can be
1 Lecture 2 and 3: Controllability of DT-LTI systems Spring 2013 - EE 194, Advanced Control (Prof Khan) January 23 (Wed) and 28 (Mon), 2013 I LTI SYSTEMS Recall that continuous-time LTI systems can be
The norms can also be characterized in terms of Riccati inequalities.
 9 Analysis of stability and H norms Consider the causal, linear, time-invariant system ẋ(t = Ax(t + Bu(t y(t = Cx(t Denote the transfer function G(s := C (si A 1 B. Theorem 85 The following statements
9 Analysis of stability and H norms Consider the causal, linear, time-invariant system ẋ(t = Ax(t + Bu(t y(t = Cx(t Denote the transfer function G(s := C (si A 1 B. Theorem 85 The following statements
Research Article Stabilization Analysis and Synthesis of Discrete-Time Descriptor Markov Jump Systems with Partially Unknown Transition Probabilities
 Research Journal of Applied Sciences, Engineering and Technology 7(4): 728-734, 214 DOI:1.1926/rjaset.7.39 ISSN: 24-7459; e-issn: 24-7467 214 Maxwell Scientific Publication Corp. Submitted: February 25,
Research Journal of Applied Sciences, Engineering and Technology 7(4): 728-734, 214 DOI:1.1926/rjaset.7.39 ISSN: 24-7459; e-issn: 24-7467 214 Maxwell Scientific Publication Corp. Submitted: February 25,
A Comparative Study on Automatic Flight Control for small UAV
 Proceedings of the 5 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'18) Niagara Falls, Canada June 7 9, 18 Paper No. 13 DOI: 1.11159/cdsr18.13 A Comparative Study on Automatic
Proceedings of the 5 th International Conference of Control, Dynamic Systems, and Robotics (CDSR'18) Niagara Falls, Canada June 7 9, 18 Paper No. 13 DOI: 1.11159/cdsr18.13 A Comparative Study on Automatic
Modern Control Systems
 Modern Control Systems Matthew M. Peet Arizona State University Lecture 09: Observability Observability For Static Full-State Feedback, we assume knowledge of the Full-State. In reality, we only have measurements
Modern Control Systems Matthew M. Peet Arizona State University Lecture 09: Observability Observability For Static Full-State Feedback, we assume knowledge of the Full-State. In reality, we only have measurements
Analysis and Synthesis of Single-Input Single-Output Control Systems
 Lino Guzzella Analysis and Synthesis of Single-Input Single-Output Control Systems l+kja» \Uja>)W2(ja»\ um Contents 1 Definitions and Problem Formulations 1 1.1 Introduction 1 1.2 Definitions 1 1.2.1 Systems
Lino Guzzella Analysis and Synthesis of Single-Input Single-Output Control Systems l+kja» \Uja>)W2(ja»\ um Contents 1 Definitions and Problem Formulations 1 1.1 Introduction 1 1.2 Definitions 1 1.2.1 Systems