Differential Equations
|
|
|
- Sophie Francis
- 5 years ago
- Views:
Transcription

1 Differential Equations
2
3
4 Overview of differential equation! Initial value problem! Explicit numeric methods! Implicit numeric methods! Modular implementation
5 Physics-based simulation An algorithm that produces a sequence of states over time under the laws of physics! What is a state?
6 Physics simulation x i differential equations x i+1 integrator x i x i+1 = x i + x x
7 Differential equations What is a differential equation?! It describes the relation between an unknown function and its derivatives! Ordinary differential equation (ODE)! is the relation that contains functions of only one independent variable and its derivatives
8 Ordinary differential equations An ODE is an equality equation involving a function and its derivatives known function ẋ(t) =f(x(t)) time derivative of the unknown function unknown function that evaluates the state given time What does it mean to solve an ODE?
9 Symbolic solutions Standard introductory differential equation courses focus on finding solutions analytically! Linear ODEs can be solved by integral transforms! Use DSolve[eqn,x,t] in Mathematica Differential equation: ẋ(t) = Solution: x(t) =e kt kx(t)
10 Numerical solutions In this class, we will be concerned with numerical solutions! Derivative function f is regarded as a black box! Given a numerical value x and t, the black box will return the time derivative of x
11 Physics-based simulation x i differential equations x i+1 integrator x i x i+1 = x i + x x
12 Overview of differential equation! Initial value problem! Explicit numeric methods! Implicit numeric methods! Modular implementation
13 Initial value problems In a canonical initial value problem, the behavior of the system is described by an ODE and its initial condition: ẋ = f(x, t) x(t 0 )=x 0 To solve x(t) numerically, we start out from x 0 and follow the changes defined by f thereafter
14 Vector field x 2 The differential equation can be visualized as a vector field ẋ = f(x,t) x 1


15 Quiz Which one is the vector field of ẋ = 0.5x?
16 Vector field x 2 The differential equation can be visualized as a vector field ẋ = f(x,t) How does the vector field look like if f depends directly on time? x 1
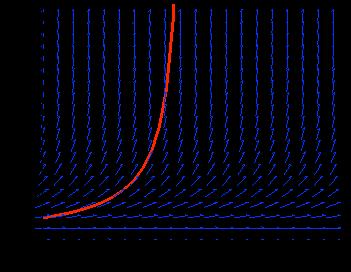
17 Integral curves t 0 f(x,t)dt f(x,t)
18 Physics-based simulation x i Newtonian laws gravity wind gust x i+1 elastic force.. integrator x x i x i+1 = x i + x
19 Overview of differential equation! Initial value problem! Explicit numeric methods! Implicit numeric methods! Modular implementation
20 Explicit Euler method How do we get to the next state from the current state? x(t 0 + h) x(t 0 ) p x(t 0 + h) =x 0 + hẋ(t 0 ) Instead of following real integral curve, p follows a polygonal path Discrete time step h determines the errors
21 Problems of Euler method Inaccuracy The circle turns into a spiral no matter how small the step size is
22 Problems of Euler method Instability ẋ = kx Symbolic solution: x(t) =e kt Oscillation: x(t) oscillates around equilibrium. Divergence: x(t) eventually goes to infinity (or negative infinity).
23 Problems of Euler method Instability ẋ = kx Symbolic solution: x(t) =e kt h < 1/k to avoid oscillation
24 Quiz Instability ẋ = kx Symbolic solution: x(t) =e kt What s the largest time step without divergence?
25 Quiz Instability ẋ = kx Symbolic solution: x(t) =e kt What s the largest time step without oscillation?
26 Accuracy of Euler method At each step, x(t) can be written in the form of Taylor series:! is a representation of a function as an infinite sum of terms calculated using! x(t 0 + h) =x(t 0 )+hẋ(t 0 )+ h2 2! ẍ(t 0)+ h3 3! x(3) (t 0 )+... hn the n x derivatives at a particular point n! t n What is the order of the error term in Euler method?! The cost per step is determined by the number of evaluations per step
27 Stability of Euler method Assume the derivative function is linear!! Look at x parallel to the largest eigenvector of A!! Note that eigenvalue d dt x = Ax d dt x = λx λ can be complex
28 The test equation Test equation advances x by!! x n+1 = x n + hλx n Solving gives!! x n =(1+hλ) n x 0 Condition of stability 1+hλ 1
29 Stability region Plot all the values of hλ on the complex plane where Euler method is stable
30 Real eigenvalue If eigenvalue is real and negative, what kind of the motion does x correspond to?! a damping motion smoothly coming to a halt! The threshold of time step!! h 2 λ What about the imaginary axis?
31 Imaginary eigenvalue If eigenvalue is pure imaginary, Euler method is unconditionally unstable! What motion does x look like if the eigenvalue is pure imaginary?! an oscillatory or circular motion! We need to look at other methods
32 The midpoint method 1. Compute an Euler step x = hf(x(t 0 )) 2. Evaluate f at the midpoint f mid = f(x(t 0 )+ x 2 ) 3. Take a step using f mid x(t 0 + h) =x(t 0 )+hf mid x(t + h) =x 0 + hf(x 0 + h 2 f(x 0))
33 Accuracy of midpoint Prove that the midpoint method has second order accuracy x(t + h) =x 0 + hf(x 0 + h 2 f(x 0)) x = h 2 f(x 0) f(x 0 + x) =f(x 0 )+ x f(x 0) x x(t + h) =x 0 + hf(x 0 )+ h2 2 f(x 0) f(x 0) x x(t + h) =x 0 + hẋ 0 + h2 2 ẍ0 + O(h 3 ) + O(x 2 ) + ho(x 2 )
34 Stability region x n+1 = x n + hλx n+ 1 2 = x n + hλ(x n hλx n) x n+1 = x n (1 + hλ (hλ)2 ) hλ = x + iy 1 [ 0 ] + [ x y ] [ x 2 y 2 2xy ] 1 [ 1+x + x 2 y 2 2 y + xy ] 1
35 Stability of midpoint Midpoint method has larger stability region, but still unstable on the imaginary axis
36 Quiz RK2 RK1 Consider a dynamic system where = 2 i2 What is the largest time step for RK1? What is the largest time step for RK2?
37 Runge-Kutta method Runge-Kutta is a numeric method of integrating ODEs by evaluating the derivatives at a few locations to cancel out lower-order error terms! Also an explicit method: x n+1 is an explicit function of x n
38 Runge-Kutta method q-stage p-order Runge-Kutta evaluates the derivative function q times in each iteration and its approximation of the next state is correct within O(h p+1 )! What order of Runge-Kutta does midpoint method correspond to?
39 4-stage 4 th order Runge-Kutta k 1 = hf(x 0,t 0 ) k 2 = hf(x 0 + k 1 2,t 0 + h 2 ) k 3 = hf(x 0 + k 2 2,t 0 + h 2 ) k 4 = hf(x 0 + k 3,t 0 + h) x(t 0 + h) = x k k k k 4 x 1. f(x 0,t 0 ) x 0 2. f(x 0 + k 1 2,t 0 + h 2 ) f(x 0 + k ,t 0 + h 2 ) x(t 0 + h) f(x 0 + k 3,t 0 + h) t 4.
40 High order Runge-Kutta RK3 and up are include part of the imaginary axis
41 Quiz If lambda is where the red dot is, which integrators can generate stable simulation? RK1 (A) RK4 only (B) RK4 and RK3 (C) RK4, RK3, and RK1
42 Stage vs. order p q The minimum number of stages necessary for an explicit method to attain order p is still an open problem Why is fourth order the most popular Runge Kutta method?
43 Adaptive step size Ideally, we want to choose h as large as possible, but not so large as to give us big error or instability! We can vary h as we march forward in time! Step doubling! Embedding estimate! Variable step, variable order
44 Step doubling Estimate x a by taking a full Euler step x a = x 0 + hf(x 0,t 0 ) e Estimate x b by taking two half Euler steps x temp = x 0 + h 2 f(x 0,t 0 ) x b = x temp + h 2 f(x temp,t 0 + h 2 ) e = x a x b is bound by O(h 2 ) Given error tolerance ϵ, what is the optimal step size? ( ϵ e)1 2 h
45 Quiz I use step doubling at the current step and the error is 0.4. Given that the error threshold of the simulation is set at 0.001, I should (A) Increase h by 400 times! (B) Decrease h by 400 times! (C) Increase h by 20 times! (D) Decrease h by 20 times
46 Embedding estimate Also called Runge-Kutta-Fehlberg! Compare two estimates of! x(t 0 + h) Fifth order Runge-Kutta with 6 stages! Forth order Runge-Kutta with 6 stages
47 Variable step, variable order Change between methods of different order as well as step based on obtained error estimates! These methods are currently the last work in numerical integration
48 Problems of explicit methods Do not work well with stiff ODEs! Simulation blows up if the step size is too big! Simulation progresses slowly if the step size is too small
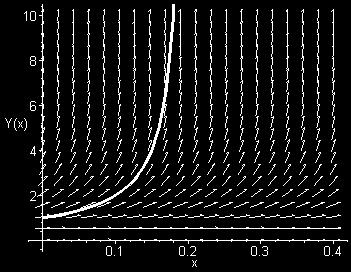
49 Example: a bead on the wire y(t) Y(t) =(x(t),y(t)) x(t) Ẏ = d dt ( x(t) y(t) ) = ( x(t) ky(t) ) Explicit Euler s method: Y new = Y 0 + hẏ(t 0)= ( x(t) y(t) ) + h ( x(t) ky(t) ) Y new = ( (1 h)x(t) (1 kh)y(t) )
50 Stiff equations Stiffness constant: k! Step size is limited by the largest k! Systems that has some big k s mixed in are called stiff system
51 Overview of differential equation! Initial value problem! Explicit numeric methods! Implicit numeric methods! Modular implementation
52 Implicit methods Explicit Euler: Y new = Y 0 + hf(y 0 ) Implicit Euler: Y new = Y 0 + hf(y new ) Solving for Y new such that! f, at time t 0 + h, points directly back at!!! Y 0
53 Implicit methods Our goal is to solve for Y new such that Y new = Y 0 + hf(y new ) Approximating f(y new ) by linearizing f(y) f(y new )=f(y 0 )+ Yf (Y 0 ), where Y = Y new Y 0 Y new = Y 0 + hf(y 0 )+h Yf (Y 0 ) ( ) 1 1 Y = h I f (Y 0 ) f(y 0 ) f(y,t)=ẏ(t) f(y,t) = f Y
54 Example: A bead on the wire Apply the implicit Euler method to the bead-on-wire example ( ) 1 1 Y = h I f (Y 0 ) f(y 0 ) [ ] x(t) f(y(t)) = ky(t) [ 1 0 f (Y(t)) = f(y(t)) = Y 0 k [ 1+h ] 1 [ ] Y = h 0 x0 1+kh 0 ky 0 = = h [ h h h 1+kh [ h h+1 x 0 h 1+kh ky 0 ] ][ ] x0 ky 0 ]
55 Example: A bead on the wire What is the largest step size the implicit Euler method can take? lim Y = lim h h [ = x 0 1 k ky 0 [ h h+1 x 0 h 1+kh ky 0 ] = ] [ x0 y 0 ] Y new = Y 0 +( Y 0 )=0
56 Quiz Consider a linear ODE in apple ẋ = f(x) = R x If h = 1 and the current state is apple What is the next state computed by an implicit integrator?
57 Stability of implicit Euler Test equation shows stable when!! 1 hλ 1 How does the stability region look like?
58 Problems of implicit Euler Implicit Euler could be stable even when physics is not!! Implicit Euler damps out motion unrealistically
59 Implicit vs. explicit correct solution: x(h) =e hk x ẋ(h) = kx(h) x(0) = 1 explicit Euler: implicit Euler: x(h) = x(h) =1 hk 1 1+hk h
60 Trapezoidal rule Take a half step of explicit Euler and a half step of implicit Euler!! x n+1 = x n + h( 1 2 f(x n)+ 1 2 f(x n+1)) Explicit Euler is under-stable, implicit Euler is over-stable, the combination is just right
61 Stability of Trapezoidal What is the test equation for Trapezoidal?!! hλ 0 Where is the stability region?! negative half-plane! Stability region is consistent with physics! Good for pure rotation
62 Terminology Explicit Euler is also called forward Euler! Implicit Euler is also called backward Euler
63 Overview of differential equation! Initial value problem! Explicit numeric methods! Implicit numeric methods! Modular implementation
64 Modular implementation Write integrator in terms of! Reusable code! Simple system implementation! Generic operations:! Get dim(x)! Get/Set x and t! Derivative evaluation at current (x, t)
65 Solver interface GetDim System (black box) Get/Set State Solver (integrator) Deriv Eval
66 Summary Explicit Euler is simple, but might not be stable; modified Euler may be a cheap alternative! RK4 allows for larger time step, but requires much more computation! Use implicit Euler for better stability, but beware of over-damp
67 Quiz When I tried to simulate an ideal spring using explicit Euler method, the simulation blew up very quickly after a few iterations. Which of the following actions will result in stable simulation? Why?!! 1. Reduce time step 2. Use midpoint method 3. Use implicit method 4. Use fourth order Runge Kutta method! 5. Use trapzoidal rule
Differential Equations
 Pysics-based simulation xi Differential Equations xi+1 xi xi+1 xi + x x Pysics-based simulation xi Wat is a differential equation? Differential equations describe te relation between an unknown function
Pysics-based simulation xi Differential Equations xi+1 xi xi+1 xi + x x Pysics-based simulation xi Wat is a differential equation? Differential equations describe te relation between an unknown function
Physically Based Modeling Differential Equation Basics
 Physically Based Modeling Differential Equation Basics Andrew Witkin and David Baraff Pixar Animation Studios Please note: This document is 2001 by Andrew Witkin and David Baraff. This chapter may be freely
Physically Based Modeling Differential Equation Basics Andrew Witkin and David Baraff Pixar Animation Studios Please note: This document is 2001 by Andrew Witkin and David Baraff. This chapter may be freely
Physically Based Modeling: Principles and Practice Differential Equation Basics
 Physically Based Modeling: Principles and Practice Differential Equation Basics Andrew Witkin and David Baraff Robotics Institute Carnegie Mellon University Please note: This document is 1997 by Andrew
Physically Based Modeling: Principles and Practice Differential Equation Basics Andrew Witkin and David Baraff Robotics Institute Carnegie Mellon University Please note: This document is 1997 by Andrew
CS 450 Numerical Analysis. Chapter 9: Initial Value Problems for Ordinary Differential Equations
 Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 9 Initial Value Problems for Ordinary Differential Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign
Scientific Computing: An Introductory Survey Chapter 9 Initial Value Problems for Ordinary Differential Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign
Lecture Notes to Accompany. Scientific Computing An Introductory Survey. by Michael T. Heath. Chapter 9
 Lecture Notes to Accompany Scientific Computing An Introductory Survey Second Edition by Michael T. Heath Chapter 9 Initial Value Problems for Ordinary Differential Equations Copyright c 2001. Reproduction
Lecture Notes to Accompany Scientific Computing An Introductory Survey Second Edition by Michael T. Heath Chapter 9 Initial Value Problems for Ordinary Differential Equations Copyright c 2001. Reproduction
Logistic Map, Euler & Runge-Kutta Method and Lotka-Volterra Equations
 Logistic Map, Euler & Runge-Kutta Method and Lotka-Volterra Equations S. Y. Ha and J. Park Department of Mathematical Sciences Seoul National University Sep 23, 2013 Contents 1 Logistic Map 2 Euler and
Logistic Map, Euler & Runge-Kutta Method and Lotka-Volterra Equations S. Y. Ha and J. Park Department of Mathematical Sciences Seoul National University Sep 23, 2013 Contents 1 Logistic Map 2 Euler and
Review Higher Order methods Multistep methods Summary HIGHER ORDER METHODS. P.V. Johnson. School of Mathematics. Semester
 HIGHER ORDER METHODS School of Mathematics Semester 1 2008 OUTLINE 1 REVIEW 2 HIGHER ORDER METHODS 3 MULTISTEP METHODS 4 SUMMARY OUTLINE 1 REVIEW 2 HIGHER ORDER METHODS 3 MULTISTEP METHODS 4 SUMMARY OUTLINE
HIGHER ORDER METHODS School of Mathematics Semester 1 2008 OUTLINE 1 REVIEW 2 HIGHER ORDER METHODS 3 MULTISTEP METHODS 4 SUMMARY OUTLINE 1 REVIEW 2 HIGHER ORDER METHODS 3 MULTISTEP METHODS 4 SUMMARY OUTLINE
ECE257 Numerical Methods and Scientific Computing. Ordinary Differential Equations
 ECE257 Numerical Methods and Scientific Computing Ordinary Differential Equations Today s s class: Stiffness Multistep Methods Stiff Equations Stiffness occurs in a problem where two or more independent
ECE257 Numerical Methods and Scientific Computing Ordinary Differential Equations Today s s class: Stiffness Multistep Methods Stiff Equations Stiffness occurs in a problem where two or more independent
Ordinary differential equation II
 Ordinary Differential Equations ISC-5315 1 Ordinary differential equation II 1 Some Basic Methods 1.1 Backward Euler method (implicit method) The algorithm looks like this: y n = y n 1 + hf n (1) In contrast
Ordinary Differential Equations ISC-5315 1 Ordinary differential equation II 1 Some Basic Methods 1.1 Backward Euler method (implicit method) The algorithm looks like this: y n = y n 1 + hf n (1) In contrast
NUMERICAL SOLUTION OF ODE IVPs. Overview
 NUMERICAL SOLUTION OF ODE IVPs 1 Quick review of direction fields Overview 2 A reminder about and 3 Important test: Is the ODE initial value problem? 4 Fundamental concepts: Euler s Method 5 Fundamental
NUMERICAL SOLUTION OF ODE IVPs 1 Quick review of direction fields Overview 2 A reminder about and 3 Important test: Is the ODE initial value problem? 4 Fundamental concepts: Euler s Method 5 Fundamental
What we ll do: Lecture 21. Ordinary Differential Equations (ODEs) Differential Equations. Ordinary Differential Equations
 Differential Equations. Ordinary Differential Equations") What we ll do: Lecture Ordinary Differential Equations J. Chaudhry Department of Mathematics and Statistics University of New Mexico Review ODEs Single Step Methods Euler s method (st order accurate) Runge-Kutta
What we ll do: Lecture Ordinary Differential Equations J. Chaudhry Department of Mathematics and Statistics University of New Mexico Review ODEs Single Step Methods Euler s method (st order accurate) Runge-Kutta
Fourth Order RK-Method
 Fourth Order RK-Method The most commonly used method is Runge-Kutta fourth order method. The fourth order RK-method is y i+1 = y i + 1 6 (k 1 + 2k 2 + 2k 3 + k 4 ), Ordinary Differential Equations (ODE)
Fourth Order RK-Method The most commonly used method is Runge-Kutta fourth order method. The fourth order RK-method is y i+1 = y i + 1 6 (k 1 + 2k 2 + 2k 3 + k 4 ), Ordinary Differential Equations (ODE)
Chapter 11 ORDINARY DIFFERENTIAL EQUATIONS
 Chapter 11 ORDINARY DIFFERENTIAL EQUATIONS The general form of a first order differential equations is = f(x, y) with initial condition y(a) = y a We seek the solution y = y(x) for x > a This is shown
Chapter 11 ORDINARY DIFFERENTIAL EQUATIONS The general form of a first order differential equations is = f(x, y) with initial condition y(a) = y a We seek the solution y = y(x) for x > a This is shown
Ordinary Differential Equations II
 Ordinary Differential Equations II CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Ordinary Differential Equations II 1 / 33 Almost Done! Last
Ordinary Differential Equations II CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Ordinary Differential Equations II 1 / 33 Almost Done! Last
Modeling & Simulation 2018 Lecture 12. Simulations
 Modeling & Simulation 2018 Lecture 12. Simulations Claudio Altafini Automatic Control, ISY Linköping University, Sweden Summary of lecture 7-11 1 / 32 Models of complex systems physical interconnections,
Modeling & Simulation 2018 Lecture 12. Simulations Claudio Altafini Automatic Control, ISY Linköping University, Sweden Summary of lecture 7-11 1 / 32 Models of complex systems physical interconnections,
Solving scalar IVP s : Runge-Kutta Methods
 Solving scalar IVP s : Runge-Kutta Methods Josh Engwer Texas Tech University March 7, NOTATION: h step size x n xt) t n+ t + h x n+ xt n+ ) xt + h) dx = ft, x) SCALAR IVP ASSUMED THROUGHOUT: dt xt ) =
Solving scalar IVP s : Runge-Kutta Methods Josh Engwer Texas Tech University March 7, NOTATION: h step size x n xt) t n+ t + h x n+ xt n+ ) xt + h) dx = ft, x) SCALAR IVP ASSUMED THROUGHOUT: dt xt ) =
Ordinary Differential Equations II
 Ordinary Differential Equations II CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Ordinary Differential Equations II 1 / 29 Almost Done! No
Ordinary Differential Equations II CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Ordinary Differential Equations II 1 / 29 Almost Done! No
Consistency and Convergence
 Jim Lambers MAT 77 Fall Semester 010-11 Lecture 0 Notes These notes correspond to Sections 1.3, 1.4 and 1.5 in the text. Consistency and Convergence We have learned that the numerical solution obtained
Jim Lambers MAT 77 Fall Semester 010-11 Lecture 0 Notes These notes correspond to Sections 1.3, 1.4 and 1.5 in the text. Consistency and Convergence We have learned that the numerical solution obtained
Numerical Methods - Initial Value Problems for ODEs
 Numerical Methods - Initial Value Problems for ODEs Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Initial Value Problems for ODEs 2013 1 / 43 Outline 1 Initial Value
Numerical Methods - Initial Value Problems for ODEs Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Initial Value Problems for ODEs 2013 1 / 43 Outline 1 Initial Value
Stability regions of Runge-Kutta methods. Stephan Houben Eindhoven University of Technology
 Stability regions of Runge-Kutta methods Stephan Houben Eindhoven University of Technology February 19, 2002 1 Overview of the talk 1. Quick review of some concepts 2. Stability regions 3. L-stability
Stability regions of Runge-Kutta methods Stephan Houben Eindhoven University of Technology February 19, 2002 1 Overview of the talk 1. Quick review of some concepts 2. Stability regions 3. L-stability
Chapter 6 Nonlinear Systems and Phenomena. Friday, November 2, 12
 Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
8.1 Introduction. Consider the initial value problem (IVP):
:") 8.1 Introduction Consider the initial value problem (IVP): y dy dt = f(t, y), y(t 0)=y 0, t 0 t T. Geometrically: solutions are a one parameter family of curves y = y(t) in(t, y)-plane. Assume solution
8.1 Introduction Consider the initial value problem (IVP): y dy dt = f(t, y), y(t 0)=y 0, t 0 t T. Geometrically: solutions are a one parameter family of curves y = y(t) in(t, y)-plane. Assume solution
Integration of Ordinary Differential Equations
 Integration of Ordinary Differential Equations Com S 477/577 Nov 7, 00 1 Introduction The solution of differential equations is an important problem that arises in a host of areas. Many differential equations
Integration of Ordinary Differential Equations Com S 477/577 Nov 7, 00 1 Introduction The solution of differential equations is an important problem that arises in a host of areas. Many differential equations
Ordinary Differential Equations
 Chapter 13 Ordinary Differential Equations We motivated the problem of interpolation in Chapter 11 by transitioning from analzying to finding functions. That is, in problems like interpolation and regression,
Chapter 13 Ordinary Differential Equations We motivated the problem of interpolation in Chapter 11 by transitioning from analzying to finding functions. That is, in problems like interpolation and regression,
Numerical Methods for Initial Value Problems; Harmonic Oscillators
 Lab 1 Numerical Methods for Initial Value Problems; Harmonic Oscillators Lab Objective: Implement several basic numerical methods for initial value problems (IVPs), and use them to study harmonic oscillators.
Lab 1 Numerical Methods for Initial Value Problems; Harmonic Oscillators Lab Objective: Implement several basic numerical methods for initial value problems (IVPs), and use them to study harmonic oscillators.
Numerical solution of ODEs
 Numerical solution of ODEs Arne Morten Kvarving Department of Mathematical Sciences Norwegian University of Science and Technology November 5 2007 Problem and solution strategy We want to find an approximation
Numerical solution of ODEs Arne Morten Kvarving Department of Mathematical Sciences Norwegian University of Science and Technology November 5 2007 Problem and solution strategy We want to find an approximation
Solving Ordinary Differential equations
 Solving Ordinary Differential equations Taylor methods can be used to build explicit methods with higher order of convergence than Euler s method. The main difficult of these methods is the computation
Solving Ordinary Differential equations Taylor methods can be used to build explicit methods with higher order of convergence than Euler s method. The main difficult of these methods is the computation
Numerical Methods for Initial Value Problems; Harmonic Oscillators
 1 Numerical Methods for Initial Value Problems; Harmonic Oscillators Lab Objective: Implement several basic numerical methods for initial value problems (IVPs), and use them to study harmonic oscillators.
1 Numerical Methods for Initial Value Problems; Harmonic Oscillators Lab Objective: Implement several basic numerical methods for initial value problems (IVPs), and use them to study harmonic oscillators.
Identification Methods for Structural Systems. Prof. Dr. Eleni Chatzi Lecture March, 2016
 Prof. Dr. Eleni Chatzi Lecture 4-09. March, 2016 Fundamentals Overview Multiple DOF Systems State-space Formulation Eigenvalue Analysis The Mode Superposition Method The effect of Damping on Structural
Prof. Dr. Eleni Chatzi Lecture 4-09. March, 2016 Fundamentals Overview Multiple DOF Systems State-space Formulation Eigenvalue Analysis The Mode Superposition Method The effect of Damping on Structural
Ordinary differential equations - Initial value problems
 Education has produced a vast population able to read but unable to distinguish what is worth reading. G.M. TREVELYAN Chapter 6 Ordinary differential equations - Initial value problems In this chapter
Education has produced a vast population able to read but unable to distinguish what is worth reading. G.M. TREVELYAN Chapter 6 Ordinary differential equations - Initial value problems In this chapter
Numerical Methods for Differential Equations
 Numerical Methods for Differential Equations Chapter 2: Runge Kutta and Linear Multistep methods Gustaf Söderlind and Carmen Arévalo Numerical Analysis, Lund University Textbooks: A First Course in the
Numerical Methods for Differential Equations Chapter 2: Runge Kutta and Linear Multistep methods Gustaf Söderlind and Carmen Arévalo Numerical Analysis, Lund University Textbooks: A First Course in the
Initial value problems for ordinary differential equations
 Initial value problems for ordinary differential equations Xiaojing Ye, Math & Stat, Georgia State University Spring 2019 Numerical Analysis II Xiaojing Ye, Math & Stat, Georgia State University 1 IVP
Initial value problems for ordinary differential equations Xiaojing Ye, Math & Stat, Georgia State University Spring 2019 Numerical Analysis II Xiaojing Ye, Math & Stat, Georgia State University 1 IVP
A Brief Introduction to Numerical Methods for Differential Equations
 A Brief Introduction to Numerical Methods for Differential Equations January 10, 2011 This tutorial introduces some basic numerical computation techniques that are useful for the simulation and analysis
A Brief Introduction to Numerical Methods for Differential Equations January 10, 2011 This tutorial introduces some basic numerical computation techniques that are useful for the simulation and analysis
Mathematics for chemical engineers. Numerical solution of ordinary differential equations
 Mathematics for chemical engineers Drahoslava Janovská Numerical solution of ordinary differential equations Initial value problem Winter Semester 2015-2016 Outline 1 Introduction 2 One step methods Euler
Mathematics for chemical engineers Drahoslava Janovská Numerical solution of ordinary differential equations Initial value problem Winter Semester 2015-2016 Outline 1 Introduction 2 One step methods Euler
Physics 115/242 Comparison of methods for integrating the simple harmonic oscillator.
 Physics 115/4 Comparison of methods for integrating the simple harmonic oscillator. Peter Young I. THE SIMPLE HARMONIC OSCILLATOR The energy (sometimes called the Hamiltonian ) of the simple harmonic oscillator
Physics 115/4 Comparison of methods for integrating the simple harmonic oscillator. Peter Young I. THE SIMPLE HARMONIC OSCILLATOR The energy (sometimes called the Hamiltonian ) of the simple harmonic oscillator
Math 660 Lecture 4: FDM for evolutionary equations: ODE solvers
 Math 660 Lecture 4: FDM for evolutionary equations: ODE solvers Consider the ODE u (t) = f(t, u(t)), u(0) = u 0, where u could be a vector valued function. Any ODE can be reduced to a first order system,
Math 660 Lecture 4: FDM for evolutionary equations: ODE solvers Consider the ODE u (t) = f(t, u(t)), u(0) = u 0, where u could be a vector valued function. Any ODE can be reduced to a first order system,
The family of Runge Kutta methods with two intermediate evaluations is defined by
 AM 205: lecture 13 Last time: Numerical solution of ordinary differential equations Today: Additional ODE methods, boundary value problems Thursday s lecture will be given by Thomas Fai Assignment 3 will
AM 205: lecture 13 Last time: Numerical solution of ordinary differential equations Today: Additional ODE methods, boundary value problems Thursday s lecture will be given by Thomas Fai Assignment 3 will
Numerical Methods for the Solution of Differential Equations
 Numerical Methods for the Solution of Differential Equations Markus Grasmair Vienna, winter term 2011 2012 Analytical Solutions of Ordinary Differential Equations 1. Find the general solution of the differential
Numerical Methods for the Solution of Differential Equations Markus Grasmair Vienna, winter term 2011 2012 Analytical Solutions of Ordinary Differential Equations 1. Find the general solution of the differential
Ordinary Differential Equations
 Ordinary Differential Equations We call Ordinary Differential Equation (ODE) of nth order in the variable x, a relation of the kind: where L is an operator. If it is a linear operator, we call the equation
Ordinary Differential Equations We call Ordinary Differential Equation (ODE) of nth order in the variable x, a relation of the kind: where L is an operator. If it is a linear operator, we call the equation
ODE Runge-Kutta methods
 ODE Runge-Kutta methods The theory (very short excerpts from lectures) First-order initial value problem We want to approximate the solution Y(x) of a system of first-order ordinary differential equations
ODE Runge-Kutta methods The theory (very short excerpts from lectures) First-order initial value problem We want to approximate the solution Y(x) of a system of first-order ordinary differential equations
Ordinary Differential Equations
 CHAPTER 8 Ordinary Differential Equations 8.1. Introduction My section 8.1 will cover the material in sections 8.1 and 8.2 in the book. Read the book sections on your own. I don t like the order of things
CHAPTER 8 Ordinary Differential Equations 8.1. Introduction My section 8.1 will cover the material in sections 8.1 and 8.2 in the book. Read the book sections on your own. I don t like the order of things
Lecture 4: Numerical solution of ordinary differential equations
 Lecture 4: Numerical solution of ordinary differential equations Department of Mathematics, ETH Zürich General explicit one-step method: Consistency; Stability; Convergence. High-order methods: Taylor
Lecture 4: Numerical solution of ordinary differential equations Department of Mathematics, ETH Zürich General explicit one-step method: Consistency; Stability; Convergence. High-order methods: Taylor
Numerical Differential Equations: IVP
 Chapter 11 Numerical Differential Equations: IVP **** 4/16/13 EC (Incomplete) 11.1 Initial Value Problem for Ordinary Differential Equations We consider the problem of numerically solving a differential
Chapter 11 Numerical Differential Equations: IVP **** 4/16/13 EC (Incomplete) 11.1 Initial Value Problem for Ordinary Differential Equations We consider the problem of numerically solving a differential
Ordinary Differential Equations I
 Ordinary Differential Equations I CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Ordinary Differential Equations I 1 / 32 Theme of Last Few
Ordinary Differential Equations I CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Ordinary Differential Equations I 1 / 32 Theme of Last Few
Solving Ordinary Differential Equations
 Solving Ordinary Differential Equations Sanzheng Qiao Department of Computing and Software McMaster University March, 2014 Outline 1 Initial Value Problem Euler s Method Runge-Kutta Methods Multistep Methods
Solving Ordinary Differential Equations Sanzheng Qiao Department of Computing and Software McMaster University March, 2014 Outline 1 Initial Value Problem Euler s Method Runge-Kutta Methods Multistep Methods
Math Numerical Analysis Homework #4 Due End of term. y = 2y t 3y2 t 3, 1 t 2, y(1) = 1. n=(b-a)/h+1; % the number of steps we need to take
 = 1. n=(b-a)/h+1; % the number of steps we need to take") Math 32 - Numerical Analysis Homework #4 Due End of term Note: In the following y i is approximation of y(t i ) and f i is f(t i,y i ).. Consider the initial value problem, y = 2y t 3y2 t 3, t 2, y() =.
Math 32 - Numerical Analysis Homework #4 Due End of term Note: In the following y i is approximation of y(t i ) and f i is f(t i,y i ).. Consider the initial value problem, y = 2y t 3y2 t 3, t 2, y() =.
CS520: numerical ODEs (Ch.2)
") .. CS520: numerical ODEs (Ch.2) Uri Ascher Department of Computer Science University of British Columbia ascher@cs.ubc.ca people.cs.ubc.ca/ ascher/520.html Uri Ascher (UBC) CPSC 520: ODEs (Ch. 2) Fall
.. CS520: numerical ODEs (Ch.2) Uri Ascher Department of Computer Science University of British Columbia ascher@cs.ubc.ca people.cs.ubc.ca/ ascher/520.html Uri Ascher (UBC) CPSC 520: ODEs (Ch. 2) Fall
Computational Techniques Prof. Dr. Niket Kaisare Department of Chemical Engineering Indian Institute of Technology, Madras
 Computational Techniques Prof. Dr. Niket Kaisare Department of Chemical Engineering Indian Institute of Technology, Madras Module No. # 07 Lecture No. # 05 Ordinary Differential Equations (Refer Slide
Computational Techniques Prof. Dr. Niket Kaisare Department of Chemical Engineering Indian Institute of Technology, Madras Module No. # 07 Lecture No. # 05 Ordinary Differential Equations (Refer Slide
Physically Based Modeling: Principles and Practice Implicit Methods for Differential Equations
 Pysically Based Modeling: Principles and Practice Implicit Metods for Differential Equations David Baraff Robotics Institute Carnegie Mellon University Please note: Tis document is 997 by David Baraff
Pysically Based Modeling: Principles and Practice Implicit Metods for Differential Equations David Baraff Robotics Institute Carnegie Mellon University Please note: Tis document is 997 by David Baraff
Applied Math for Engineers
 Applied Math for Engineers Ming Zhong Lecture 15 March 28, 2018 Ming Zhong (JHU) AMS Spring 2018 1 / 28 Recap Table of Contents 1 Recap 2 Numerical ODEs: Single Step Methods 3 Multistep Methods 4 Method
Applied Math for Engineers Ming Zhong Lecture 15 March 28, 2018 Ming Zhong (JHU) AMS Spring 2018 1 / 28 Recap Table of Contents 1 Recap 2 Numerical ODEs: Single Step Methods 3 Multistep Methods 4 Method
Numerical Methods for Differential Equations
 CHAPTER 5 Numerical Methods for Differential Equations In this chapter we will discuss a few of the many numerical methods which can be used to solve initial value problems and one-dimensional boundary
CHAPTER 5 Numerical Methods for Differential Equations In this chapter we will discuss a few of the many numerical methods which can be used to solve initial value problems and one-dimensional boundary
APPLICATIONS OF FD APPROXIMATIONS FOR SOLVING ORDINARY DIFFERENTIAL EQUATIONS
 LECTURE 10 APPLICATIONS OF FD APPROXIMATIONS FOR SOLVING ORDINARY DIFFERENTIAL EQUATIONS Ordinary Differential Equations Initial Value Problems For Initial Value problems (IVP s), conditions are specified
LECTURE 10 APPLICATIONS OF FD APPROXIMATIONS FOR SOLVING ORDINARY DIFFERENTIAL EQUATIONS Ordinary Differential Equations Initial Value Problems For Initial Value problems (IVP s), conditions are specified
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Numerical Methods for ODEs. Lectures for PSU Summer Programs Xiantao Li
 Numerical Methods for ODEs Lectures for PSU Summer Programs Xiantao Li Outline Introduction Some Challenges Numerical methods for ODEs Stiff ODEs Accuracy Constrained dynamics Stability Coarse-graining
Numerical Methods for ODEs Lectures for PSU Summer Programs Xiantao Li Outline Introduction Some Challenges Numerical methods for ODEs Stiff ODEs Accuracy Constrained dynamics Stability Coarse-graining
Mini project ODE, TANA22
 Mini project ODE, TANA22 Filip Berglund (filbe882) Linh Nguyen (linng299) Amanda Åkesson (amaak531) October 2018 1 1 Introduction Carl David Tohmé Runge (1856 1927) was a German mathematician and a prominent
Mini project ODE, TANA22 Filip Berglund (filbe882) Linh Nguyen (linng299) Amanda Åkesson (amaak531) October 2018 1 1 Introduction Carl David Tohmé Runge (1856 1927) was a German mathematician and a prominent
Chapter 8. Numerical Solution of Ordinary Differential Equations. Module No. 1. Runge-Kutta Methods
 Numerical Analysis by Dr. Anita Pal Assistant Professor Department of Mathematics National Institute of Technology Durgapur Durgapur-71309 email: anita.buie@gmail.com 1 . Chapter 8 Numerical Solution of
Numerical Analysis by Dr. Anita Pal Assistant Professor Department of Mathematics National Institute of Technology Durgapur Durgapur-71309 email: anita.buie@gmail.com 1 . Chapter 8 Numerical Solution of
 Notes for Numerical Analysis Math 5466 by S. Adjerid Virginia Polytechnic Institute and State University (A Rough Draft) Contents Numerical Methods for ODEs 5. Introduction............................
Notes for Numerical Analysis Math 5466 by S. Adjerid Virginia Polytechnic Institute and State University (A Rough Draft) Contents Numerical Methods for ODEs 5. Introduction............................
Ordinary Differential Equations I
 Ordinary Differential Equations I CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Ordinary Differential Equations I 1 / 27 Theme of Last Three
Ordinary Differential Equations I CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Ordinary Differential Equations I 1 / 27 Theme of Last Three
Chapter 6 - Ordinary Differential Equations
 Chapter 6 - Ordinary Differential Equations 7.1 Solving Initial-Value Problems In this chapter, we will be interested in the solution of ordinary differential equations. Ordinary differential equations
Chapter 6 - Ordinary Differential Equations 7.1 Solving Initial-Value Problems In this chapter, we will be interested in the solution of ordinary differential equations. Ordinary differential equations
Finite Difference and Finite Element Methods
 Finite Difference and Finite Element Methods Georgy Gimel farb COMPSCI 369 Computational Science 1 / 39 1 Finite Differences Difference Equations 3 Finite Difference Methods: Euler FDMs 4 Finite Element
Finite Difference and Finite Element Methods Georgy Gimel farb COMPSCI 369 Computational Science 1 / 39 1 Finite Differences Difference Equations 3 Finite Difference Methods: Euler FDMs 4 Finite Element
4 Stability analysis of finite-difference methods for ODEs
 MATH 337, by T. Lakoba, University of Vermont 36 4 Stability analysis of finite-difference methods for ODEs 4.1 Consistency, stability, and convergence of a numerical method; Main Theorem In this Lecture
MATH 337, by T. Lakoba, University of Vermont 36 4 Stability analysis of finite-difference methods for ODEs 4.1 Consistency, stability, and convergence of a numerical method; Main Theorem In this Lecture
The Chemical Kinetics Time Step a detailed lecture. Andrew Conley ACOM Division
 The Chemical Kinetics Time Step a detailed lecture Andrew Conley ACOM Division Simulation Time Step Deep convection Shallow convection Stratiform tend (sedimentation, detrain, cloud fraction, microphysics)
The Chemical Kinetics Time Step a detailed lecture Andrew Conley ACOM Division Simulation Time Step Deep convection Shallow convection Stratiform tend (sedimentation, detrain, cloud fraction, microphysics)
Ordinary Differential Equations (ODEs)
") Ordinary Differential Equations (ODEs) 1 Computer Simulations Why is computation becoming so important in physics? One reason is that most of our analytical tools such as differential calculus are best
Ordinary Differential Equations (ODEs) 1 Computer Simulations Why is computation becoming so important in physics? One reason is that most of our analytical tools such as differential calculus are best
[ ] is a vector of size p.
![[ ] is a vector of size p.](/thumbs/96/127815952.jpg "[ ] is a vector of size p.") Lecture 11 Copyright by Hongyun Wang, UCSC Recap: General form of explicit Runger-Kutta methods for solving y = F( y, t) k i = hfy n + i1 j =1 c ij k j, t n + d i h, i = 1,, p + p j =1 b j k j A Runge-Kutta
Lecture 11 Copyright by Hongyun Wang, UCSC Recap: General form of explicit Runger-Kutta methods for solving y = F( y, t) k i = hfy n + i1 j =1 c ij k j, t n + d i h, i = 1,, p + p j =1 b j k j A Runge-Kutta
Fundamentals Physics
 Fundamentals Physics And Differential Equations 1 Dynamics Dynamics of a material point Ideal case, but often sufficient Dynamics of a solid Including rotation, torques 2 Position, Velocity, Acceleration
Fundamentals Physics And Differential Equations 1 Dynamics Dynamics of a material point Ideal case, but often sufficient Dynamics of a solid Including rotation, torques 2 Position, Velocity, Acceleration
Explicit One-Step Methods
 Chapter 1 Explicit One-Step Methods Remark 11 Contents This class presents methods for the numerical solution of explicit systems of initial value problems for ordinary differential equations of first
Chapter 1 Explicit One-Step Methods Remark 11 Contents This class presents methods for the numerical solution of explicit systems of initial value problems for ordinary differential equations of first
Initial value problems for ordinary differential equations
 AMSC/CMSC 660 Scientific Computing I Fall 2008 UNIT 5: Numerical Solution of Ordinary Differential Equations Part 1 Dianne P. O Leary c 2008 The Plan Initial value problems (ivps) for ordinary differential
AMSC/CMSC 660 Scientific Computing I Fall 2008 UNIT 5: Numerical Solution of Ordinary Differential Equations Part 1 Dianne P. O Leary c 2008 The Plan Initial value problems (ivps) for ordinary differential
Virtual Reality & Physically-Based Simulation
 Virtual Reality & Physically-Based Simulation Mass-Spring-Systems G. Zachmann University of Bremen, Germany cgvr.cs.uni-bremen.de Definition: A mass-spring system is a system consisting of: 1. A set of
Virtual Reality & Physically-Based Simulation Mass-Spring-Systems G. Zachmann University of Bremen, Germany cgvr.cs.uni-bremen.de Definition: A mass-spring system is a system consisting of: 1. A set of
CDS 101 Precourse Phase Plane Analysis and Stability
 CDS 101 Precourse Phase Plane Analysis and Stability Melvin Leok Control and Dynamical Systems California Institute of Technology Pasadena, CA, 26 September, 2002. mleok@cds.caltech.edu http://www.cds.caltech.edu/
CDS 101 Precourse Phase Plane Analysis and Stability Melvin Leok Control and Dynamical Systems California Institute of Technology Pasadena, CA, 26 September, 2002. mleok@cds.caltech.edu http://www.cds.caltech.edu/
Numerical methods for physics simulations.
 Numerical methods for physics simulations. Claude Lacoursière HPC2N/VRlab, Umeå Universiy, Umeå, Sweden, and CMLabs Simulations, Montréal, Canada May 8, 26 Typeset by FoilTEX May 5th 26 Outline Typeset
Numerical methods for physics simulations. Claude Lacoursière HPC2N/VRlab, Umeå Universiy, Umeå, Sweden, and CMLabs Simulations, Montréal, Canada May 8, 26 Typeset by FoilTEX May 5th 26 Outline Typeset
Solution of ordinary Differential Equations
 42 Chapter 4 Solution of ordinary Differential Equations Highly suggested Reading Press et al., 1992. Numerical Recipes, 2nd Edition. Chapter 16. (Good description). See also chapter 17. And Matlab help
42 Chapter 4 Solution of ordinary Differential Equations Highly suggested Reading Press et al., 1992. Numerical Recipes, 2nd Edition. Chapter 16. (Good description). See also chapter 17. And Matlab help
Graded Project #1. Part 1. Explicit Runge Kutta methods. Goals Differential Equations FMN130 Gustaf Söderlind and Carmen Arévalo
 2008-11-07 Graded Project #1 Differential Equations FMN130 Gustaf Söderlind and Carmen Arévalo This homework is due to be handed in on Wednesday 12 November 2008 before 13:00 in the post box of the numerical
2008-11-07 Graded Project #1 Differential Equations FMN130 Gustaf Söderlind and Carmen Arévalo This homework is due to be handed in on Wednesday 12 November 2008 before 13:00 in the post box of the numerical
Ordinary Differential Equations
 Ordinary Differential Equations Michael H. F. Wilkinson Institute for Mathematics and Computing Science University of Groningen The Netherlands December 2005 Overview What are Ordinary Differential Equations
Ordinary Differential Equations Michael H. F. Wilkinson Institute for Mathematics and Computing Science University of Groningen The Netherlands December 2005 Overview What are Ordinary Differential Equations
Numerical Methods for Differential Equations
 Numerical Methods for Differential Equations Chapter 2: Runge Kutta and Multistep Methods Gustaf Söderlind Numerical Analysis, Lund University Contents V4.16 1. Runge Kutta methods 2. Embedded RK methods
Numerical Methods for Differential Equations Chapter 2: Runge Kutta and Multistep Methods Gustaf Söderlind Numerical Analysis, Lund University Contents V4.16 1. Runge Kutta methods 2. Embedded RK methods
Differential Equations
 Differential Equations Definitions Finite Differences Taylor Series based Methods: Euler Method Runge-Kutta Methods Improved Euler, Midpoint methods Runge Kutta (2nd, 4th order) methods Predictor-Corrector
Differential Equations Definitions Finite Differences Taylor Series based Methods: Euler Method Runge-Kutta Methods Improved Euler, Midpoint methods Runge Kutta (2nd, 4th order) methods Predictor-Corrector
Worksheet 8 Sample Solutions
 Technische Universität München WS 2016/17 Lehrstuhl für Informatik V Scientific Computing Univ.-Prof. Dr. M. Bader 19.12.2016/21.12.2016 M.Sc. S. Seckler, M.Sc. D. Jarema Worksheet 8 Sample Solutions Ordinary
Technische Universität München WS 2016/17 Lehrstuhl für Informatik V Scientific Computing Univ.-Prof. Dr. M. Bader 19.12.2016/21.12.2016 M.Sc. S. Seckler, M.Sc. D. Jarema Worksheet 8 Sample Solutions Ordinary
Numerical Algorithms for ODEs/DAEs (Transient Analysis)
") Numerical Algorithms for ODEs/DAEs (Transient Analysis) Slide 1 Solving Differential Equation Systems d q ( x(t)) + f (x(t)) + b(t) = 0 dt DAEs: many types of solutions useful DC steady state: state no
Numerical Algorithms for ODEs/DAEs (Transient Analysis) Slide 1 Solving Differential Equation Systems d q ( x(t)) + f (x(t)) + b(t) = 0 dt DAEs: many types of solutions useful DC steady state: state no
Scientific Computing with Case Studies SIAM Press, Lecture Notes for Unit V Solution of
 Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit V Solution of Differential Equations Part 1 Dianne P. O Leary c 2008 1 The
Scientific Computing with Case Studies SIAM Press, 2009 http://www.cs.umd.edu/users/oleary/sccswebpage Lecture Notes for Unit V Solution of Differential Equations Part 1 Dianne P. O Leary c 2008 1 The
Dynamical Systems. August 13, 2013
 Dynamical Systems Joshua Wilde, revised by Isabel Tecu, Takeshi Suzuki and María José Boccardi August 13, 2013 Dynamical Systems are systems, described by one or more equations, that evolve over time.
Dynamical Systems Joshua Wilde, revised by Isabel Tecu, Takeshi Suzuki and María José Boccardi August 13, 2013 Dynamical Systems are systems, described by one or more equations, that evolve over time.
Lecture V: The game-engine loop & Time Integration
 Lecture V: The game-engine loop & Time Integration The Basic Game-Engine Loop Previous state: " #, %(#) ( #, )(#) Forces -(#) Integrate velocities and positions Resolve Interpenetrations Per-body change
Lecture V: The game-engine loop & Time Integration The Basic Game-Engine Loop Previous state: " #, %(#) ( #, )(#) Forces -(#) Integrate velocities and positions Resolve Interpenetrations Per-body change
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 5 Chapter 21 Numerical Differentiation PowerPoints organized by Dr. Michael R. Gustafson II, Duke University 1 All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 5 Chapter 21 Numerical Differentiation PowerPoints organized by Dr. Michael R. Gustafson II, Duke University 1 All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
AIMS Exercise Set # 1
 AIMS Exercise Set #. Determine the form of the single precision floating point arithmetic used in the computers at AIMS. What is the largest number that can be accurately represented? What is the smallest
AIMS Exercise Set #. Determine the form of the single precision floating point arithmetic used in the computers at AIMS. What is the largest number that can be accurately represented? What is the smallest
AMS 147 Computational Methods and Applications Lecture 09 Copyright by Hongyun Wang, UCSC. Exact value. Effect of round-off error.
 Lecture 09 Copyrigt by Hongyun Wang, UCSC Recap: Te total error in numerical differentiation fl( f ( x + fl( f ( x E T ( = f ( x Numerical result from a computer Exact value = e + f x+ Discretization error
Lecture 09 Copyrigt by Hongyun Wang, UCSC Recap: Te total error in numerical differentiation fl( f ( x + fl( f ( x E T ( = f ( x Numerical result from a computer Exact value = e + f x+ Discretization error
PowerPoints organized by Dr. Michael R. Gustafson II, Duke University
 Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Part 6 Chapter 20 Initial-Value Problems PowerPoints organized by Dr. Michael R. Gustafson II, Duke University All images copyright The McGraw-Hill Companies, Inc. Permission required for reproduction
Lecture IV: Time Discretization
 Lecture IV: Time Discretization Motivation Kinematics: continuous motion in continuous time Computer simulation: Discrete time steps t Discrete Space (mesh particles) Updating Position Force induces acceleration.
Lecture IV: Time Discretization Motivation Kinematics: continuous motion in continuous time Computer simulation: Discrete time steps t Discrete Space (mesh particles) Updating Position Force induces acceleration.
The Finite Element Method for the Analysis of Non-Linear and Dynamic Systems: Non-Linear Dynamics Part I
 The Finite Element Method for the Analysis of Non-Linear and Dynamic Systems: Non-Linear Dynamics Part I Prof. Dr. Eleni Chatzi Dr. Giuseppe Abbiati, Dr. Konstantinos Agathos Lecture 5/Part A - 23 November,
The Finite Element Method for the Analysis of Non-Linear and Dynamic Systems: Non-Linear Dynamics Part I Prof. Dr. Eleni Chatzi Dr. Giuseppe Abbiati, Dr. Konstantinos Agathos Lecture 5/Part A - 23 November,
Bindel, Fall 2011 Intro to Scientific Computing (CS 3220) Week 12: Monday, Apr 18. HW 7 is posted, and will be due in class on 4/25.
 Week 12: Monday, Apr 18. HW 7 is posted, and will be due in class on 4/25.") Logistics Week 12: Monday, Apr 18 HW 6 is due at 11:59 tonight. HW 7 is posted, and will be due in class on 4/25. The prelim is graded. An analysis and rubric are on CMS. Problem du jour For implicit methods
Logistics Week 12: Monday, Apr 18 HW 6 is due at 11:59 tonight. HW 7 is posted, and will be due in class on 4/25. The prelim is graded. An analysis and rubric are on CMS. Problem du jour For implicit methods
Computational project: Modelling a simple quadrupole mass spectrometer
 Computational project: Modelling a simple quadrupole mass spectrometer Martin Duy Tat a, Anders Hagen Jarmund a a Norges Teknisk-Naturvitenskapelige Universitet, Trondheim, Norway. Abstract In this project
Computational project: Modelling a simple quadrupole mass spectrometer Martin Duy Tat a, Anders Hagen Jarmund a a Norges Teknisk-Naturvitenskapelige Universitet, Trondheim, Norway. Abstract In this project
Ordinary Differential Equations: Initial Value problems (IVP)
") Chapter Ordinary Differential Equations: Initial Value problems (IVP) Many engineering applications can be modeled as differential equations (DE) In this book, our emphasis is about how to use computer
Chapter Ordinary Differential Equations: Initial Value problems (IVP) Many engineering applications can be modeled as differential equations (DE) In this book, our emphasis is about how to use computer
Numerical Solutions to Partial Differential Equations
 Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University The Implicit Schemes for the Model Problem The Crank-Nicolson scheme and θ-scheme
Numerical Solutions to Partial Differential Equations Zhiping Li LMAM and School of Mathematical Sciences Peking University The Implicit Schemes for the Model Problem The Crank-Nicolson scheme and θ-scheme
Ordinary Differential Equations
 Ordinary Differential Equations Introduction: first order ODE We are given a function f(t,y) which describes a direction field in the (t,y) plane an initial point (t 0,y 0 ) We want to find a function
Ordinary Differential Equations Introduction: first order ODE We are given a function f(t,y) which describes a direction field in the (t,y) plane an initial point (t 0,y 0 ) We want to find a function
THE TRAPEZOIDAL QUADRATURE RULE
 y 1 Computing area under y=1/(1+x^2) 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Trapezoidal rule x THE TRAPEZOIDAL QUADRATURE RULE From Chapter 5, we have the quadrature
y 1 Computing area under y=1/(1+x^2) 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1 Trapezoidal rule x THE TRAPEZOIDAL QUADRATURE RULE From Chapter 5, we have the quadrature
Lecture 5: Single Step Methods
 Lecture 5: Single Step Methods J.K. Ryan@tudelft.nl WI3097TU Delft Institute of Applied Mathematics Delft University of Technology 1 October 2012 () Single Step Methods 1 October 2012 1 / 44 Outline 1
Lecture 5: Single Step Methods J.K. Ryan@tudelft.nl WI3097TU Delft Institute of Applied Mathematics Delft University of Technology 1 October 2012 () Single Step Methods 1 October 2012 1 / 44 Outline 1
Constrained dynamics
 Constrained dynamics Simple particle system In principle, you can make just about anything out of spring systems In practice, you can make just about anything as long as it s jello Hard constraints Constraint
Constrained dynamics Simple particle system In principle, you can make just about anything out of spring systems In practice, you can make just about anything as long as it s jello Hard constraints Constraint
STABILITY. Phase portraits and local stability
 MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
Numerical Methods for Ordinary Differential Equations
 CHAPTER 1 Numerical Methods for Ordinary Differential Equations In this chapter we discuss numerical method for ODE. We will discuss the two basic methods, Euler s Method and Runge-Kutta Method. 1. Numerical
CHAPTER 1 Numerical Methods for Ordinary Differential Equations In this chapter we discuss numerical method for ODE. We will discuss the two basic methods, Euler s Method and Runge-Kutta Method. 1. Numerical
1 The pendulum equation
 Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
FIRST-ORDER ORDINARY DIFFERENTIAL EQUATIONS III: Numerical and More Analytic Methods David Levermore Department of Mathematics University of Maryland
 FIRST-ORDER ORDINARY DIFFERENTIAL EQUATIONS III: Numerical and More Analytic Methods David Levermore Department of Mathematics University of Maryland 30 September 0 Because the presentation of this material
FIRST-ORDER ORDINARY DIFFERENTIAL EQUATIONS III: Numerical and More Analytic Methods David Levermore Department of Mathematics University of Maryland 30 September 0 Because the presentation of this material