Chapitre 4. Transition to chaos. 4.1 One-dimensional maps
|
|
|
- Willa Merry Butler
- 5 years ago
- Views:
Transcription
1 Chapitre 4 Transition to chaos In this chapter we will study how successive bifurcations can lead to chaos when a parameter is tuned. It is not an extensive review : there exists a lot of different manners to transit to chaos, we will just spend some time on the transistions that are rather well known. The understanding of the successive bifurcations leading to chaos is mostly based on the study of one-dimensional maps so that the first section of the chapter will be dedicated to some general useful tools for those kind of studies. The following parts are each dedicated to a transition to chaos : the second part describes the subharmonic cascade, the third one the intermittency phenomenon, and the last part the transition to chaos by quasi-periodicity. The description of each of those transitions will be done using a generic one-dimensional map typical of each road to chaos. The one-dimensional maps that will be studied can have several meanings. They can correspond to a model of a discrete dynamics : for example, the logistic function is used to describe successive generations in population dynamics. But we have also seen that a real, high-dimensional dynamics can be reduced in some conditions to a first return map which can be one-dimensional. Finally, from a pure mathematical point of view, the mere study of a one-dimensional map (as the study of the logistic map by M. J. Feigenbaum) can lead to a very good understanding of the mechanisms underlying chaos by itself. 4.1 One-dimensional maps Let s consider a one-dimensional map f : R R. We study the discrete dynamics given by the successive iterates of the function from an initial point x 0, which is then the initial condition of the time serie defined by : x n+1 = f(x n ). 95
2 96 CHAPITRE 4. TRANSITION TO CHAOS Graphical construction That kind of dynamics can be studied using a graphical construction. We draw the curve y = f(x) and we obtain the successive points using the line y = x : The intersection points of the curve y = f(x) and of the line y = x give the fixed points of the system as they obey to x = f(x ). Those fixed points can be stable or unstable, depending on the behavior of the successive iterates from a point in the vicinity of x Stability of the fixed points Using the tools we have learned in Chapter 1, to determine the stability of a fixed point x we study the iterates stemming from an initial condition x 0 very close to the fixed point x, i.e. x 0 = x + δx 0 with δx 0 x. We can then compute the first approximation of the iterates : x 1 = f(x 0 ) = f(x + δx 0 ) f(x ) + f (x )δx 0 = x + f (x )δx 0 We deduce δx 1 = x 1 x = f (x )δx 0. By iteration, we obtain : δx n = [f (x )] n δx 0 Consequently, and as we have already seen in Chapter 1, if f (x ) < 1, the fixed point is stable and if f (x ) > 1 it is unstable. The stability of the fixed point can thus be deduced graphically by checking the slope of the tangent to the curve in x.
3 4.2. SUBHARMONIC CASCADE Subharmonic cascade This transition is also named a period-doubling cascade : from a periodic behavior of period T, the increase of a parameter leads to a first bifurcation to a new periodic regime of period 2T, then to another one of period 4T, then 8T and so on. We thus observe successive 2 n T periodic regimes whith increasing n until we reach a value of the parameter for which the system becomes chaotic. This transition can be understood by studying the logistic map The logistic map We study the function : f(x) = rx(1 x), where r is a parameter. We will also study this discrete dynamics in the last computer session a Domain of study First, we want the dynamics to be bounded, i.e. that no time series go to infinity. This condition reduces the set of values of x that can be taken as initial conditions. The
4 98 CHAPITRE 4. TRANSITION TO CHAOS curve y = f(x) is a parabola whith a maximum for x = 1/2 and verifying f(0) = 0 and f(1) = 0. As f(1/2) = r/4, if 0 r 4, then for all x [0, 1], f(x) [0, 1]. We will thus consider the dynamics only on the intervall [0, 1] b Fixed points The fixed points are given by : x = rx rx 2 from which we deduce 2 fixed points : x = 0 which is always a fixed point, x = r 1 which exists only when 0 < r 1 < 1, i.e. when r > 1. r r We can see on the following graphs how this new fixed point appears when r increases : c Fixed points stabiity For 0 < r < 1 there is a unique fixed point x = 0. As f (0) = r, 0 < f (0) < 1, the fixed point is stable (see also graphs above).
5 4.2. SUBHARMONIC CASCADE 99 When r exceeds 1, the tangent in 0 becomes greater than 1 and the fixed point 0 becomes unstable. We can observe this change of slope of the curve at the origin on the previous figures. Simultaneously to that destabilization a new intersection of the curve with the line y = x occurs. For 1 < r < 3, the fixed point 0 is now unstable but there is a new fixed point : x = r 1. r ( ) r 1 f = 2 r, r d so that 1 < f (x ) < 1 for 1 < r < 3 and the new fixed point is stable in this range. When r increases above 3 this new fixed point becomes unstable but no new fixed point appears. Consequently, for r > 3 there are two fixed points but the two of them are unstable. Periodic dynamics of the iterate map For 3 < r < , the response of the system is periodic 1. Just after 3, in the permanent regime, the iterates oscillate between two values. This behavior can still be understood by a geometrical construction : To understand this behavior, the function to study is g = f f. Indeed, if we have an oscillation between x 1 and x 2, we have x 2 = f( x 1 ) and x 1 = f( x 2 ), so that x 1 = 1. See Matlab session.
6 100 CHAPITRE 4. TRANSITION TO CHAOS f (f( x 1 )) = g( x 1 ) and x 2 = f (f( x 2 )) = g( x 2 ), which means that x 1 and x 2 are fixed points of g. As a matter of fact, the drawing of the curves y = g(x) before and after r = 3 shows that two new fixed points appear for the function g for r > 3. Those two fixed points appear when the slope of the tangent to the curve y = g(x) in x = r 1 becomes greater than 1. The fixed point x = r 1 becomes then unstable and r r two new stable fixed points appear simultaneously on either sides of x. The bifurcation that occurs is consequently a pitchfork bifurcation. The mathematical study of g can be done. First, we compute the expression of g : To find the fixed points, we write g(x) = rf(x) (1 f(x)) = r [rx(1 x)] [1 rx(1 x)] = r 2 x(1 x) [1 rx(1 x)] x = r 2 x(1 x) [1 rx(1 x)] and then we factorize the polynom r 2 x(1 x) [1 rx(1 x)] x using the fact that r 1 r is a known root. We can then demonstrate that : x 1 = 1 + r (r 1) 2 4 2r which only exists when r 3. and x 2 = 1 + r + (r 1) 2 4 2r To study the stability of those fixed points, we have to calculate g ( x). We have g (x) = f (x)f (f(x)) so that g ( x 1 ) = f ( x 1 )f (f( x 1 )) = f ( x 1 )f ( x 2 ) = g ( x 2 ) Consequently, the two points have necessarily the same stability. The computation gives : g ( x 1,2 ) = r 2 + 2r + 4.
7 4.2. SUBHARMONIC CASCADE 101 The simultaneous destabilization of the the two points happen when g ( x) = 1, at the critical value r = = This destabilization of g is totally similar to the one which has happen to f for r = 3 and is exactly of the same nature. The study of the new periodic regime that arise after the destabilization of x 1 and x 2 can thus be done by studying the iterates of the function h = g g. The drawing the curves of the functions g = f f and h = g g = f f f f for r = 3.56 shows the four new fixed points of h after the destabilization of x 1 and x 2. The scenario we have describe for the moment from r > 3 is the following one : the fixed point x = r 1 of f, which we will consider to correspond to a limit cycle of r period T, becomes unstable at r 1 = 3 through a pitchfork bifurcation which gives rise to a periodic solution characterized by an oscillation between two points x 1 and x 2 (period 2T ). This limit cycle becomes unstable when r leading to a new periodic behavior corresponding to an oscillation between four points (period 4T ).
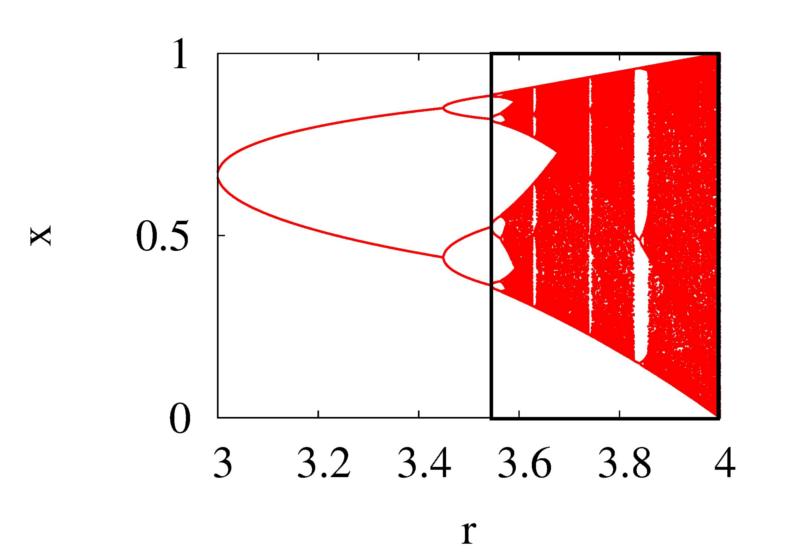
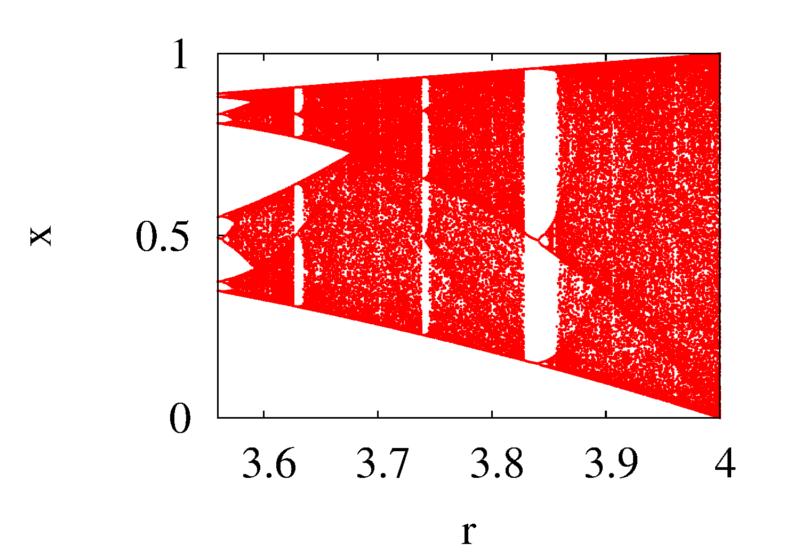
8 102 CHAPITRE 4. TRANSITION TO CHAOS We could pursued this analysis and observe successive pitchfork bifurcations giving each birth to a limit cycle of period twice the previous one. This process continues until a value of r called r : r 1 = 3 r 2 = r 3 = r 4 = r 5 = =... r = Dynamics after r For r > , we can observe either chaotic or periodic dynamics depending on the value of r. In the bifurcation diagram, where are represented the iterates of f in the permanent regime 2, aperiodic responses correspond to vertical lines where the points almost cover segments. We see in the following diagram that there are a lot of values of r for which the response is chaotic but there are also periodic windows, which correspond to values of r where periodicity is recovered. There are an infinity of such windows, we see only the larger ones on the following representations, the largest being the 3T window. 2. See Matlab session.
9 4.2. SUBHARMONIC CASCADE 103
10 104 CHAPITRE 4. TRANSITION TO CHAOS a Lyapounov exponent The chaotic or periodic behaviors can be identified by computing the Lyapounov exponent for each values of r, following the method we saw in the previous chapter : λ = 1 N N ln f (x i ) i=1 For r < r, the Lyapounov exponent is always negative. For r > r, for most of the values of r the Lyaponov exponent is positive, indicating that the regime is chaotic for most of the values of r. In fact, chaotic and periodic domains are closely intertwined : between two values of r for which the behavior is chaotic you can always find a window of values of r for which the behavior is periodic. The Lyapounov exponent for the periodic windows is then negative. Most of the periodic windows are so small that we cannot see them on the figure above because of the lack of resolution of this graph. As for the bifurcation diagram representation, we see only the larger windows.
11 4.2. SUBHARMONIC CASCADE b 3T window The study of this window imply to study the function f f f for values of r between 3.8 and 3.9 : The periodic window begins with the simultaneous emergence of 6 new fixed points : 3 stable and 3 unstable. They all appear by pairs of a stable and an unstable point through saddle-node bifurcations. The destabilization of the 3T window occurs through another cascade of period doubling leading to a succession of periodic behaviors : 6T, 12T,..., 3 2 n T. Other periodic windows (5T, 7T,...) can be found in the interval r < r < 4, but their analytical study is more difficult Universality a Qualitative point of view All the phenomenology that we have just studied using the logistic map is shared by a whole class of functions. All the functions that have the same general shape as the logistic function 3 present the same period-doubling cascade leading to a chaotic regime when the parameter is tuned. After r, the order of apparition of the periodic windows is the same. This succession of periodic windows embedded in chaotic regimes is called the universal sequence. For example, we show thereafter a study of the iterates of the function f(x) = r sin(πx), for x [0, 1] and r [0, 1] showing the similarity of the bifurcation diagrams between the logitic map and the sine one. 3. The functions have to be unimodal, i.e., continuous, differentiable, concave and with a maximum. Consequently, all the curves that are bell-shaped.
12 106 CHAPITRE 4. TRANSITION TO CHAOS Quantitative point of view For all those functions, the cascade of period-doubling comes from the fact that the destabilization mechanisms at each bifurcation is the same : only the scales on the axis change as well as the precise form of the function. This similarity can be already seen in the iterates of the logistic function. The following curves show that the parts of the curve of the iterates we need to study to understand
13 4.2. SUBHARMONIC CASCADE 107 each bifurcation have the same shape as the one of the logistic curve but at a smaller scale. In fact, after a proper renormalisation (i.e. a change of the scales of the graphs to superimposed the curves), we obtain from any unimodal function a sequence of unidimensional functions using the iterates f 2n and those sequences all converge to the same universal function. Because of this universal mechanism, the quantitative study of the values of the parameters for which the successive bifurcations occur : r 1, r 2, r 3,..., r n,..., leads to : r n r n 1 r n+1 r δ n n
14 108 CHAPITRE 4. TRANSITION TO CHAOS where δ is a universal constant (Feigenbaum constant), δ = Another scaling law characterizes the change of the size of the successive pitchforks along the vertical axis in the bifurcation diagram. This size corresponds to the distance between the location of the maximum of the initial function (1/2 in the case of the logistic map) and the closest fixed point : The ratio an a n+1 tends toward another universal constant : a n a α, n+1 n with α = This constant is linked to the size factor necessary to rescale the successive curves at each iteration. The limit universal curve is then defined implicitely by : ( x ) f(x) = αf 2. α
15 4.3. INTERMITTENCY Intermittency This kind of transition towards chaos is characterized by the apparition of bursts of irregular behaviors interrupting otherwise regular oscillations. When the parameter is tuned further towards chaos, those bursts are more and more prevalent until a fully chaotic regime is reached Type I intermittency The dynamics is now described by the following one-dimensional map : f(x) = x + ɛ + x 2, where ɛ is a small parameter ( ɛ 1). We study orbits given by the iterates x n+1 = f(x n ). The fixed points are given by : x = x + ɛ + (x ) 2, so that : if ɛ < 0, x = ± ɛ, if ɛ > 0, there are no fixed point. When ɛ < 0, we can determine the stability of the fixed points : f ( ɛ) = ɛ > 1, so that the fixed point + ɛ is unstable f ( ɛ) = 1 2 ɛ < 1, the fixed point ɛ is stable. Consequently, when the parameter ɛ increases from a small negative value to a small positive one, a pair of fixed points, one stable, one unstable, disappears. This scenario corresponds to an inverse saddle-node bifurcation. You can understand from the figures below why a saddle-node bifurcation is also called a tangent bifurcation. When ɛ 0 there are no more fixed points but if ɛ is small enough, the system will spend a lot of time in the region where the function is very close to the line y = x, as shown on the following geometric construction :
16 110 CHAPITRE 4. TRANSITION TO CHAOS When the system is trapped in this region, the observed response is very close to the periodic response which was existing just before the bifurcation, and was corresponding to the stable fixed point ɛ. When the system exits the channel between the curve y = f(x) and the line y = x, the next iterates can take very large values, which correspond to a burst in the temporal response. The system then explores the phase space before to be reinjected at the entrance of the channel where it will again be trapped. The closer to the bifurcation the system is, the longer the time spent in the channel will be. The observed behavior is then quasi-regular oscillations interrupted by irregular bursts. The duration quasi-regular oscillations between the bursts becomes shorter when moving away from the bifurcation Other intermittencies There exists other types of intermittencies but the general behavior : regular oscillations interrupted by bursts of irregular behavior, are common to all those transitions 4. For example, in the type III intermittency, the bursts display a subharmonic behavior and the one-dimensional map associated is : f(x) = (1 + ɛ)x + ax 2 + bx Transition by quasi-periodicity This transition has been proposed by D. Ruelle, F. Takens and S. Newhouse in The mathematical theorem underlying this transition is difficult. Roughly, it says that 3- frequencies quasi-periodicity is not robust : a T 3 torus does not withstand perturbations, however small. Consequently, if a system goes through three successive Hopf bifurcations, there is a very high probability that a strange attractor emerges after the third bifurcation. 4. For more details read the corresponding chapter in L ordre dans le chaos.
17 4.4. TRANSITION BY QUASI-PERIODICITY 111 We will first study a model which gives rise to quasi-periodic but also to frequency locking. Then we will describe how chaos can occur in this system First-return map The one-dimensional map describing this transition is based on a Poincaré section of the torus supporting the 2-frequencies quasi-periodic regime just before the last bifurcation. This section is a closed curve when the regime is indeed quasi-periodic, i.e. when the two frequencies are incommensurable : The one-dimensional variable used to described the system is the angle θ n giving the position of the n th point along the curve, using an arbitrary point as a reference (P 0 in the schematic example). For commodity, a variable which takes its values in the interval [0, 1] is preferred, so that finally the dynamical variable is : φ n = θn. The first return map 2π is the function g such as φ n+1 = g(φ n ). We know that for this kind of dynamics we need to characterize the ratio of the two effective frequencies of the system around the torus. This quantity is given by the winding number : φ n φ 0 σ = lim. n n
18 112 CHAPITRE 4. TRANSITION TO CHAOS When σ is irrational, the system is quasi-periodic. When the system is locked in frequency, σ is a rational p/q, the system is periodic and the Poincaré section displays a finite number of points, q if the section is well chosen. We have then a q-cycle φ 1, φ 2,..., φ q, and g q (φ i ) = φ i + p (mod 1) = φ i. The stability analysis is based on the calculation of : [g q ] (φ) = [ g q 1 g ] (φ) = g (φ) [g q 1] (g(φ)) = g (φ) [g q 2 g ] (g(φ)) = g (φ) g (g(φ)) [g q 2] ( g 2 (φ) ) = g (φ) g (g(φ)) g ( g 2 (φ) ) g ( g q 1 (φ) ) If we apply this formula to any point of a q cycle, we obtain : [g q (φ i )] = g (φ 1) g (φ 2) g (φ q), and the q cycle is stable when q g (φ i ) < 1. i= Arnold s model The archetypal first-return function for the study of the transition to chaos by quasiperiodicity is the following one : φ n+1 = φ n + α β 2π sin(2πφ n) (mod 1), the function is noted g α,β, so that φ n+1 = g α,β (φ n ), and g α,β (φ) = 1 β cos(2πφ). When β = 0, the equation corresponds exactly to the example of trajectories we studied at the beginning of chapter 3 of straight lines of constant slope on the unfold torus. Here the slope of the lines is α and corresponds to the ratio of the two frequencies. The behavior is then periodic or quasi-periodic depending on the value of α. In such an equation (φ n+1 = φ n + α), the two oscillators underlying the dynamics are uncoupled. No locking of the frequencies coming from dynamical reasons is possible. The coupling of the oscillators comes from the β parameter. When β > 0 we will be able to obtain locking or unlocking of the oscillators depending on the value of β for a given value of α.
19 4.4. TRANSITION BY QUASI-PERIODICITY a Frequency locking : Arnold s tongues Case σ = 1 : a winding number σ = 1 corresponds to a a frequency locking 1 : 1 and to a unique point on the Poincaré map. Consequently, it is a fixed point of the map : which leads to the relation φ = φ + α β 2π sin(2πφ ) 2πα β = sin(2πφ ). A solution, and thus a limit cycle, thus exist for 1 < 2πα < 1. Stable cycles verify β 1 β cos(2πφ ) < 1, so that for 0 < β < 1 the obtained limit cycle is always stable. This region of 1 : 1 locking is represented on the following diagram as the hatched area : If α and β are given, the stable fixed point can also be find using a graphical methods for the one-dimensional map : Each of those one-dimensional maps correspond to one of the points on the previous stability diagram. The first one (parameters : blue point on the stability diagram, first return map : blue curve) is the case of a stable fixed point corresponding to the 1 : 1 locking. In the second example (parameters : green point on the stability diagram, first return map :
20 114 CHAPITRE 4. TRANSITION TO CHAOS green curve), fixed points corresponding to φ = g(φ ) still exist but are they all unstable. In the last case (parameters : magenta point on the stability diagram, first return map : magenta curve), no fixed points of the form φ = g(φ ) exists. Case σ = p/q : For other values of σ = p/q, fixed points of the function g q α,β have to be found. For example, for the values of parameter (α = 0.345, β = 0.8) which were our example of a case without 1 : 1 frequency locking, the function g g g has 3 stable fixed points : The domain of existence of this 3 cycle can be studied. For a given value of β we can search for the interval of the values of α for which the fixed points exist and are stable : Studying systematically g 3 α,β, we obtain then a new set of tongues that we can add to the stability diagram.
21 4.4. TRANSITION BY QUASI-PERIODICITY 115 Repeating this study we obtain domains of frequency locking, called Arnold s tongues, that we can gather on a diagram. For a given 0 < β < 1, we have intervals of frequency locking separated by domains of quasi-periodicity. Figure 4.1 Figure from V. Croquette course http: // If we represent the winding number σ as a function of α, the graph looks like a staircase, called a devil s staircase, formed by horizontal plateaus corresponding to the locking domains. When β increases, the width of the stairs widened and the locking domains are wider and wider. At β = 1, the tongues are touching each other and the unlocked domains of quasi-periodicity form a set of points almost empty. The staircase is said to be complete, the sum of the width of all the stairs is equal to 1. Figure 4.2 Arnold s tongues, figure from V. Croquette course b Transition to chaos When β > 1, the tongues corresponding to frequency locking in the (α, β) plane overlap. Moreover, if we go back to the study of the one-dimensional map, we observe that the map is not any more inversible for β > 1 :
22 116 CHAPITRE 4. TRANSITION TO CHAOS The non-inversibility is the fact that several φ n+1 can have different antecedents. It appears when the curve is not monotoneous anymore. As g α,β (φ) = 1 β cos(2πφ), the noninversibility appears when the derivative can change sign, i.e. for β > 1. From the Poincaré section point of view it corresponds to a folding of the closed curve, which is an indication of the destruction of the torus. Figures from the book Deterministic Chaos, W.G Schuster and W. Just.
23 4.4. TRANSITION BY QUASI-PERIODICITY 117 In the domain β > 1, we can then observe chaos when the torus is destroyed. Still, some regions of locking persist for some values of the parameters, but outside those regions we observe chaos. Their is a close imbrication of chaotic domains and periodic domains in the parameter space. As for the other studied routes towards chaos, the main features of the transitions does not depend of the precise form of the considered map but of some generic properties of the first return map. Conclusion In this chapter we studied very briefly some routes towards chaos. What is important to note is that all those transitions depend only on a few general properties of the function describing the dynamics of the system. When a first-return map is closed to one of the model maps that have been presented in this chapter, the transition to chaos will be of the type of the corresponding model. This universality explain why those routes have been observed in very different systems. Much more transitions to chaos exist and most of them are far from being understood as well as the ones described here. Bibliography In English : Deterministic Chaos, An Introduction, H. G. Schuster and W. Just In French : L ordre dans le chaos, P. Bergé, Y. Pomeau, C. Vidal Cours DEA de V. Croquette, croquette/index.html
Chapter 4. Transition towards chaos. 4.1 One-dimensional maps
 Chapter 4 Transition towards chaos In this chapter we will study how successive bifurcations can lead to chaos when a parameter is tuned. It is not an extensive review : there exists a lot of different
Chapter 4 Transition towards chaos In this chapter we will study how successive bifurcations can lead to chaos when a parameter is tuned. It is not an extensive review : there exists a lot of different
Scenarios for the transition to chaos
 Scenarios for the transition to chaos Alessandro Torcini alessandro.torcini@cnr.it Istituto dei Sistemi Complessi - CNR - Firenze Istituto Nazionale di Fisica Nucleare - Sezione di Firenze Centro interdipartimentale
Scenarios for the transition to chaos Alessandro Torcini alessandro.torcini@cnr.it Istituto dei Sistemi Complessi - CNR - Firenze Istituto Nazionale di Fisica Nucleare - Sezione di Firenze Centro interdipartimentale
2 Discrete growth models, logistic map (Murray, Chapter 2)
") 2 Discrete growth models, logistic map (Murray, Chapter 2) As argued in Lecture 1 the population of non-overlapping generations can be modelled as a discrete dynamical system. This is an example of an
2 Discrete growth models, logistic map (Murray, Chapter 2) As argued in Lecture 1 the population of non-overlapping generations can be modelled as a discrete dynamical system. This is an example of an
Bifurcations in the Quadratic Map
 Chapter 14 Bifurcations in the Quadratic Map We will approach the study of the universal period doubling route to chaos by first investigating the details of the quadratic map. This investigation suggests
Chapter 14 Bifurcations in the Quadratic Map We will approach the study of the universal period doubling route to chaos by first investigating the details of the quadratic map. This investigation suggests
16 Period doubling route to chaos
 16 Period doubling route to chaos We now study the routes or scenarios towards chaos. We ask: How does the transition from periodic to strange attractor occur? The question is analogous to the study of
16 Period doubling route to chaos We now study the routes or scenarios towards chaos. We ask: How does the transition from periodic to strange attractor occur? The question is analogous to the study of
Nonlinear Dynamics and Chaos
 Ian Eisenman eisenman@fas.harvard.edu Geological Museum 101, 6-6352 Nonlinear Dynamics and Chaos Review of some of the topics covered in homework problems, based on section notes. December, 2005 Contents
Ian Eisenman eisenman@fas.harvard.edu Geological Museum 101, 6-6352 Nonlinear Dynamics and Chaos Review of some of the topics covered in homework problems, based on section notes. December, 2005 Contents
Chaos. Lendert Gelens. KU Leuven - Vrije Universiteit Brussel Nonlinear dynamics course - VUB
 Chaos Lendert Gelens KU Leuven - Vrije Universiteit Brussel www.gelenslab.org Nonlinear dynamics course - VUB Examples of chaotic systems: the double pendulum? θ 1 θ θ 2 Examples of chaotic systems: the
Chaos Lendert Gelens KU Leuven - Vrije Universiteit Brussel www.gelenslab.org Nonlinear dynamics course - VUB Examples of chaotic systems: the double pendulum? θ 1 θ θ 2 Examples of chaotic systems: the
Dynamical Systems and Chaos Part I: Theoretical Techniques. Lecture 4: Discrete systems + Chaos. Ilya Potapov Mathematics Department, TUT Room TD325
 Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
Example Chaotic Maps (that you can analyze)
") Example Chaotic Maps (that you can analyze) Reading for this lecture: NDAC, Sections.5-.7. Lecture 7: Natural Computation & Self-Organization, Physics 256A (Winter 24); Jim Crutchfield Monday, January
Example Chaotic Maps (that you can analyze) Reading for this lecture: NDAC, Sections.5-.7. Lecture 7: Natural Computation & Self-Organization, Physics 256A (Winter 24); Jim Crutchfield Monday, January
One Dimensional Dynamical Systems
 16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
PHY411 Lecture notes Part 4
 PHY411 Lecture notes Part 4 Alice Quillen February 1, 2016 Contents 0.1 Introduction.................................... 2 1 Bifurcations of one-dimensional dynamical systems 2 1.1 Saddle-node bifurcation.............................
PHY411 Lecture notes Part 4 Alice Quillen February 1, 2016 Contents 0.1 Introduction.................................... 2 1 Bifurcations of one-dimensional dynamical systems 2 1.1 Saddle-node bifurcation.............................
Unit Ten Summary Introduction to Dynamical Systems and Chaos
 Unit Ten Summary Introduction to Dynamical Systems Dynamical Systems A dynamical system is a system that evolves in time according to a well-defined, unchanging rule. The study of dynamical systems is
Unit Ten Summary Introduction to Dynamical Systems Dynamical Systems A dynamical system is a system that evolves in time according to a well-defined, unchanging rule. The study of dynamical systems is
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10)
 Fake Past Exam (TT 10)") Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
Solutions for B8b (Nonlinear Systems) Fake Past Exam (TT 10) Mason A. Porter 15/05/2010 1 Question 1 i. (6 points) Define a saddle-node bifurcation and show that the first order system dx dt = r x e x
... it may happen that small differences in the initial conditions produce very great ones in the final phenomena. Henri Poincaré
 Chapter 2 Dynamical Systems... it may happen that small differences in the initial conditions produce very great ones in the final phenomena. Henri Poincaré One of the exciting new fields to arise out
Chapter 2 Dynamical Systems... it may happen that small differences in the initial conditions produce very great ones in the final phenomena. Henri Poincaré One of the exciting new fields to arise out
Introduction to Dynamical Systems Basic Concepts of Dynamics
 Introduction to Dynamical Systems Basic Concepts of Dynamics A dynamical system: Has a notion of state, which contains all the information upon which the dynamical system acts. A simple set of deterministic
Introduction to Dynamical Systems Basic Concepts of Dynamics A dynamical system: Has a notion of state, which contains all the information upon which the dynamical system acts. A simple set of deterministic
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
Chapter 3. Gumowski-Mira Map. 3.1 Introduction
 Chapter 3 Gumowski-Mira Map 3.1 Introduction Non linear recurrence relations model many real world systems and help in analysing their possible asymptotic behaviour as the parameters are varied [17]. Here
Chapter 3 Gumowski-Mira Map 3.1 Introduction Non linear recurrence relations model many real world systems and help in analysing their possible asymptotic behaviour as the parameters are varied [17]. Here
THREE DIMENSIONAL SYSTEMS. Lecture 6: The Lorenz Equations
 THREE DIMENSIONAL SYSTEMS Lecture 6: The Lorenz Equations 6. The Lorenz (1963) Equations The Lorenz equations were originally derived by Saltzman (1962) as a minimalist model of thermal convection in a
THREE DIMENSIONAL SYSTEMS Lecture 6: The Lorenz Equations 6. The Lorenz (1963) Equations The Lorenz equations were originally derived by Saltzman (1962) as a minimalist model of thermal convection in a
TWO DIMENSIONAL FLOWS. Lecture 5: Limit Cycles and Bifurcations
 TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
INTRODUCTION TO CHAOS THEORY T.R.RAMAMOHAN C-MMACS BANGALORE
 INTRODUCTION TO CHAOS THEORY BY T.R.RAMAMOHAN C-MMACS BANGALORE -560037 SOME INTERESTING QUOTATIONS * PERHAPS THE NEXT GREAT ERA OF UNDERSTANDING WILL BE DETERMINING THE QUALITATIVE CONTENT OF EQUATIONS;
INTRODUCTION TO CHAOS THEORY BY T.R.RAMAMOHAN C-MMACS BANGALORE -560037 SOME INTERESTING QUOTATIONS * PERHAPS THE NEXT GREAT ERA OF UNDERSTANDING WILL BE DETERMINING THE QUALITATIVE CONTENT OF EQUATIONS;
2 One-dimensional models in discrete time
 2 One-dimensional models in discrete time So far, we have assumed that demographic events happen continuously over time and can thus be written as rates. For many biological species with overlapping generations
2 One-dimensional models in discrete time So far, we have assumed that demographic events happen continuously over time and can thus be written as rates. For many biological species with overlapping generations
Chapter 19. Circle Map Properties for K<1. The one dimensional circle map. x n+1 = x n + K 2π sin 2πx n, (19.1)
") Chapter 19 Circle Map The one dimensional circle map x n+1 = x n + K 2π sin 2πx n, (19.1) where we can collapse values of x to the range 0 x 1, is sufficiently simple that much is known rigorously [1],
Chapter 19 Circle Map The one dimensional circle map x n+1 = x n + K 2π sin 2πx n, (19.1) where we can collapse values of x to the range 0 x 1, is sufficiently simple that much is known rigorously [1],
Chaos. Dr. Dylan McNamara people.uncw.edu/mcnamarad
 Chaos Dr. Dylan McNamara people.uncw.edu/mcnamarad Discovery of chaos Discovered in early 1960 s by Edward N. Lorenz (in a 3-D continuous-time model) Popularized in 1976 by Sir Robert M. May as an example
Chaos Dr. Dylan McNamara people.uncw.edu/mcnamarad Discovery of chaos Discovered in early 1960 s by Edward N. Lorenz (in a 3-D continuous-time model) Popularized in 1976 by Sir Robert M. May as an example
LECTURE 8: DYNAMICAL SYSTEMS 7
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
6.2 Their Derivatives
 Exponential Functions and 6.2 Their Derivatives Copyright Cengage Learning. All rights reserved. Exponential Functions and Their Derivatives The function f(x) = 2 x is called an exponential function because
Exponential Functions and 6.2 Their Derivatives Copyright Cengage Learning. All rights reserved. Exponential Functions and Their Derivatives The function f(x) = 2 x is called an exponential function because
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II.
 Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
v n+1 = v T + (v 0 - v T )exp(-[n +1]/ N )
![v n+1 = v T + (v 0 - v T )exp(-[n +1]/ N )](/thumbs/87/97076064.jpg "v n+1 = v T + (v 0 - v T )exp(-[n +1]/ N )") Notes on Dynamical Systems (continued) 2. Maps The surprisingly complicated behavior of the physical pendulum, and many other physical systems as well, can be more readily understood by examining their
Notes on Dynamical Systems (continued) 2. Maps The surprisingly complicated behavior of the physical pendulum, and many other physical systems as well, can be more readily understood by examining their
The Big, Big Picture (Bifurcations II)
") The Big, Big Picture (Bifurcations II) Reading for this lecture: NDAC, Chapter 8 and Sec. 10.0-10.4. 1 Beyond fixed points: Bifurcation: Qualitative change in behavior as a control parameter is (slowly)
The Big, Big Picture (Bifurcations II) Reading for this lecture: NDAC, Chapter 8 and Sec. 10.0-10.4. 1 Beyond fixed points: Bifurcation: Qualitative change in behavior as a control parameter is (slowly)
Math 345 Intro to Math Biology Lecture 7: Models of System of Nonlinear Difference Equations
 Math 345 Intro to Math Biology Lecture 7: Models of System of Nonlinear Difference Equations Junping Shi College of William and Mary, USA Equilibrium Model: x n+1 = f (x n ), here f is a nonlinear function
Math 345 Intro to Math Biology Lecture 7: Models of System of Nonlinear Difference Equations Junping Shi College of William and Mary, USA Equilibrium Model: x n+1 = f (x n ), here f is a nonlinear function
Homework 2 Modeling complex systems, Stability analysis, Discrete-time dynamical systems, Deterministic chaos
 Homework 2 Modeling complex systems, Stability analysis, Discrete-time dynamical systems, Deterministic chaos (Max useful score: 100 - Available points: 125) 15-382: Collective Intelligence (Spring 2018)
Homework 2 Modeling complex systems, Stability analysis, Discrete-time dynamical systems, Deterministic chaos (Max useful score: 100 - Available points: 125) 15-382: Collective Intelligence (Spring 2018)
Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients. Takayuki Yamaguchi
 Hokkaido Mathematical Journal Vol. 44 (2015) p. 277 312 Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients Takayuki Yamaguchi (Received March 13,
Hokkaido Mathematical Journal Vol. 44 (2015) p. 277 312 Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients Takayuki Yamaguchi (Received March 13,
SPATIOTEMPORAL CHAOS IN COUPLED MAP LATTICE. Itishree Priyadarshini. Prof. Biplab Ganguli
 SPATIOTEMPORAL CHAOS IN COUPLED MAP LATTICE By Itishree Priyadarshini Under the Guidance of Prof. Biplab Ganguli Department of Physics National Institute of Technology, Rourkela CERTIFICATE This is to
SPATIOTEMPORAL CHAOS IN COUPLED MAP LATTICE By Itishree Priyadarshini Under the Guidance of Prof. Biplab Ganguli Department of Physics National Institute of Technology, Rourkela CERTIFICATE This is to
A MINIMAL 2-D QUADRATIC MAP WITH QUASI-PERIODIC ROUTE TO CHAOS
 International Journal of Bifurcation and Chaos, Vol. 18, No. 5 (2008) 1567 1577 c World Scientific Publishing Company A MINIMAL 2-D QUADRATIC MAP WITH QUASI-PERIODIC ROUTE TO CHAOS ZERAOULIA ELHADJ Department
International Journal of Bifurcation and Chaos, Vol. 18, No. 5 (2008) 1567 1577 c World Scientific Publishing Company A MINIMAL 2-D QUADRATIC MAP WITH QUASI-PERIODIC ROUTE TO CHAOS ZERAOULIA ELHADJ Department
MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation
 MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation 1 Bifurcations in Multiple Dimensions When we were considering one-dimensional systems, we saw that subtle changes in parameter
MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation 1 Bifurcations in Multiple Dimensions When we were considering one-dimensional systems, we saw that subtle changes in parameter
CLASSIFICATION OF BIFURCATIONS AND ROUTES TO CHAOS IN A VARIANT OF MURALI LAKSHMANAN CHUA CIRCUIT
 International Journal of Bifurcation and Chaos, Vol. 12, No. 4 (2002) 783 813 c World Scientific Publishing Company CLASSIFICATION OF BIFURCATIONS AND ROUTES TO CHAOS IN A VARIANT OF MURALI LAKSHMANAN
International Journal of Bifurcation and Chaos, Vol. 12, No. 4 (2002) 783 813 c World Scientific Publishing Company CLASSIFICATION OF BIFURCATIONS AND ROUTES TO CHAOS IN A VARIANT OF MURALI LAKSHMANAN
Multistability and nonsmooth bifurcations in the quasiperiodically forced circle map
 Multistability and nonsmooth bifurcations in the quasiperiodically forced circle map arxiv:nlin/0005032v1 [nlin.cd] 16 May 2000 Hinke Osinga School of Mathematical Sciences, University of Exeter, Exeter
Multistability and nonsmooth bifurcations in the quasiperiodically forced circle map arxiv:nlin/0005032v1 [nlin.cd] 16 May 2000 Hinke Osinga School of Mathematical Sciences, University of Exeter, Exeter
Chaos in the Dynamics of the Family of Mappings f c (x) = x 2 x + c
 = x 2 x + c") IOSR Journal of Mathematics (IOSR-JM) e-issn: 78-578, p-issn: 319-765X. Volume 10, Issue 4 Ver. IV (Jul-Aug. 014), PP 108-116 Chaos in the Dynamics of the Family of Mappings f c (x) = x x + c Mr. Kulkarni
IOSR Journal of Mathematics (IOSR-JM) e-issn: 78-578, p-issn: 319-765X. Volume 10, Issue 4 Ver. IV (Jul-Aug. 014), PP 108-116 Chaos in the Dynamics of the Family of Mappings f c (x) = x x + c Mr. Kulkarni
Chaos in the Hénon-Heiles system
 Chaos in the Hénon-Heiles system University of Karlstad Christian Emanuelsson Analytical Mechanics FYGC04 Abstract This paper briefly describes how the Hénon-Helies system exhibits chaos. First some subjects
Chaos in the Hénon-Heiles system University of Karlstad Christian Emanuelsson Analytical Mechanics FYGC04 Abstract This paper briefly describes how the Hénon-Helies system exhibits chaos. First some subjects
Chapter 1. Introduction
 Chapter 1 Introduction 1.1 What is Phase-Locked Loop? The phase-locked loop (PLL) is an electronic system which has numerous important applications. It consists of three elements forming a feedback loop:
Chapter 1 Introduction 1.1 What is Phase-Locked Loop? The phase-locked loop (PLL) is an electronic system which has numerous important applications. It consists of three elements forming a feedback loop:
Announcements. Topics: Homework:
 Topics: Announcements - section 2.6 (limits at infinity [skip Precise Definitions (middle of pg. 134 end of section)]) - sections 2.1 and 2.7 (rates of change, the derivative) - section 2.8 (the derivative
Topics: Announcements - section 2.6 (limits at infinity [skip Precise Definitions (middle of pg. 134 end of section)]) - sections 2.1 and 2.7 (rates of change, the derivative) - section 2.8 (the derivative
Simple approach to the creation of a strange nonchaotic attractor in any chaotic system
 PHYSICAL REVIEW E VOLUME 59, NUMBER 5 MAY 1999 Simple approach to the creation of a strange nonchaotic attractor in any chaotic system J. W. Shuai 1, * and K. W. Wong 2, 1 Department of Biomedical Engineering,
PHYSICAL REVIEW E VOLUME 59, NUMBER 5 MAY 1999 Simple approach to the creation of a strange nonchaotic attractor in any chaotic system J. W. Shuai 1, * and K. W. Wong 2, 1 Department of Biomedical Engineering,
Fundamentals of Dynamical Systems / Discrete-Time Models. Dr. Dylan McNamara people.uncw.edu/ mcnamarad
 Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
56 CHAPTER 3. POLYNOMIAL FUNCTIONS
 56 CHAPTER 3. POLYNOMIAL FUNCTIONS Chapter 4 Rational functions and inequalities 4.1 Rational functions Textbook section 4.7 4.1.1 Basic rational functions and asymptotes As a first step towards understanding
56 CHAPTER 3. POLYNOMIAL FUNCTIONS Chapter 4 Rational functions and inequalities 4.1 Rational functions Textbook section 4.7 4.1.1 Basic rational functions and asymptotes As a first step towards understanding
The nonsmooth pitchfork bifurcation. Glendinning, Paul. MIMS EPrint: Manchester Institute for Mathematical Sciences School of Mathematics
 The nonsmooth pitchfork bifurcation Glendinning, Paul 2004 MIMS EPrint: 2006.89 Manchester Institute for Mathematical Sciences School of Mathematics The University of Manchester Reports available from:
The nonsmooth pitchfork bifurcation Glendinning, Paul 2004 MIMS EPrint: 2006.89 Manchester Institute for Mathematical Sciences School of Mathematics The University of Manchester Reports available from:
The influence of noise on two- and three-frequency quasi-periodicity in a simple model system
 arxiv:1712.06011v1 [nlin.cd] 16 Dec 2017 The influence of noise on two- and three-frequency quasi-periodicity in a simple model system A.P. Kuznetsov, S.P. Kuznetsov and Yu.V. Sedova December 19, 2017
arxiv:1712.06011v1 [nlin.cd] 16 Dec 2017 The influence of noise on two- and three-frequency quasi-periodicity in a simple model system A.P. Kuznetsov, S.P. Kuznetsov and Yu.V. Sedova December 19, 2017
Lecture 6. Lorenz equations and Malkus' waterwheel Some properties of the Lorenz Eq.'s Lorenz Map Towards definitions of:
 Lecture 6 Chaos Lorenz equations and Malkus' waterwheel Some properties of the Lorenz Eq.'s Lorenz Map Towards definitions of: Chaos, Attractors and strange attractors Transient chaos Lorenz Equations
Lecture 6 Chaos Lorenz equations and Malkus' waterwheel Some properties of the Lorenz Eq.'s Lorenz Map Towards definitions of: Chaos, Attractors and strange attractors Transient chaos Lorenz Equations
One dimensional Maps
 Chapter 4 One dimensional Maps The ordinary differential equation studied in chapters 1-3 provide a close link to actual physical systems it is easy to believe these equations provide at least an approximate
Chapter 4 One dimensional Maps The ordinary differential equation studied in chapters 1-3 provide a close link to actual physical systems it is easy to believe these equations provide at least an approximate
A Two-dimensional Discrete Mapping with C Multifold Chaotic Attractors
 EJTP 5, No. 17 (2008) 111 124 Electronic Journal of Theoretical Physics A Two-dimensional Discrete Mapping with C Multifold Chaotic Attractors Zeraoulia Elhadj a, J. C. Sprott b a Department of Mathematics,
EJTP 5, No. 17 (2008) 111 124 Electronic Journal of Theoretical Physics A Two-dimensional Discrete Mapping with C Multifold Chaotic Attractors Zeraoulia Elhadj a, J. C. Sprott b a Department of Mathematics,
On Riddled Sets and Bifurcations of Chaotic Attractors
 Applied Mathematical Sciences, Vol. 1, 2007, no. 13, 603-614 On Riddled Sets and Bifurcations of Chaotic Attractors I. Djellit Department of Mathematics University of Annaba B.P. 12, 23000 Annaba, Algeria
Applied Mathematical Sciences, Vol. 1, 2007, no. 13, 603-614 On Riddled Sets and Bifurcations of Chaotic Attractors I. Djellit Department of Mathematics University of Annaba B.P. 12, 23000 Annaba, Algeria
Phase Desynchronization as a Mechanism for Transitions to High-Dimensional Chaos
 Commun. Theor. Phys. (Beijing, China) 35 (2001) pp. 682 688 c International Academic Publishers Vol. 35, No. 6, June 15, 2001 Phase Desynchronization as a Mechanism for Transitions to High-Dimensional
Commun. Theor. Phys. (Beijing, China) 35 (2001) pp. 682 688 c International Academic Publishers Vol. 35, No. 6, June 15, 2001 Phase Desynchronization as a Mechanism for Transitions to High-Dimensional
Chaotic motion. Phys 750 Lecture 9
 Chaotic motion Phys 750 Lecture 9 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t =0to
Chaotic motion Phys 750 Lecture 9 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t =0to
CHAOS -SOME BASIC CONCEPTS
 CHAOS -SOME BASIC CONCEPTS Anders Ekberg INTRODUCTION This report is my exam of the "Chaos-part" of the course STOCHASTIC VIBRATIONS. I m by no means any expert in the area and may well have misunderstood
CHAOS -SOME BASIC CONCEPTS Anders Ekberg INTRODUCTION This report is my exam of the "Chaos-part" of the course STOCHASTIC VIBRATIONS. I m by no means any expert in the area and may well have misunderstood
Lecture 1: A Preliminary to Nonlinear Dynamics and Chaos
 Lecture 1: A Preliminary to Nonlinear Dynamics and Chaos Autonomous Systems A set of coupled autonomous 1st-order ODEs. Here "autonomous" means that the right hand side of the equations does not explicitly
Lecture 1: A Preliminary to Nonlinear Dynamics and Chaos Autonomous Systems A set of coupled autonomous 1st-order ODEs. Here "autonomous" means that the right hand side of the equations does not explicitly
DRIVEN and COUPLED OSCILLATORS. I Parametric forcing The pendulum in 1:2 resonance Santiago de Compostela
 DRIVEN and COUPLED OSCILLATORS I Parametric forcing The pendulum in 1:2 resonance Santiago de Compostela II Coupled oscillators Resonance tongues Huygens s synchronisation III Coupled cell system with
DRIVEN and COUPLED OSCILLATORS I Parametric forcing The pendulum in 1:2 resonance Santiago de Compostela II Coupled oscillators Resonance tongues Huygens s synchronisation III Coupled cell system with
Solutions to homework assignment #7 Math 119B UC Davis, Spring for 1 r 4. Furthermore, the derivative of the logistic map is. L r(x) = r(1 2x).
 = r(1 2x).") Solutions to homework assignment #7 Math 9B UC Davis, Spring 0. A fixed point x of an interval map T is called superstable if T (x ) = 0. Find the value of 0 < r 4 for which the logistic map L r has a
Solutions to homework assignment #7 Math 9B UC Davis, Spring 0. A fixed point x of an interval map T is called superstable if T (x ) = 0. Find the value of 0 < r 4 for which the logistic map L r has a
CHAPTER 2 FEIGENBAUM UNIVERSALITY IN 1-DIMENSIONAL NONLINEAR ALGEBRAIC MAPS
 CHAPTER 2 FEIGENBAUM UNIVERSALITY IN 1-DIMENSIONAL NONLINEAR ALGEBRAIC MAPS The chief aim of this chapter is to discuss the dynamical behaviour of some 1-dimensional discrete maps. In this chapter, we
CHAPTER 2 FEIGENBAUM UNIVERSALITY IN 1-DIMENSIONAL NONLINEAR ALGEBRAIC MAPS The chief aim of this chapter is to discuss the dynamical behaviour of some 1-dimensional discrete maps. In this chapter, we
Example of a Blue Sky Catastrophe
 PUB:[SXG.TEMP]TRANS2913EL.PS 16-OCT-2001 11:08:53.21 SXG Page: 99 (1) Amer. Math. Soc. Transl. (2) Vol. 200, 2000 Example of a Blue Sky Catastrophe Nikolaĭ Gavrilov and Andrey Shilnikov To the memory of
PUB:[SXG.TEMP]TRANS2913EL.PS 16-OCT-2001 11:08:53.21 SXG Page: 99 (1) Amer. Math. Soc. Transl. (2) Vol. 200, 2000 Example of a Blue Sky Catastrophe Nikolaĭ Gavrilov and Andrey Shilnikov To the memory of
Solution to Homework #4 Roy Malka
 1. Show that the map: Solution to Homework #4 Roy Malka F µ : x n+1 = x n + µ x 2 n x n R (1) undergoes a saddle-node bifurcation at (x, µ) = (0, 0); show that for µ < 0 it has no fixed points whereas
1. Show that the map: Solution to Homework #4 Roy Malka F µ : x n+1 = x n + µ x 2 n x n R (1) undergoes a saddle-node bifurcation at (x, µ) = (0, 0); show that for µ < 0 it has no fixed points whereas
Lecture 3. Dynamical Systems in Continuous Time
 Lecture 3. Dynamical Systems in Continuous Time University of British Columbia, Vancouver Yue-Xian Li November 2, 2017 1 3.1 Exponential growth and decay A Population With Generation Overlap Consider a
Lecture 3. Dynamical Systems in Continuous Time University of British Columbia, Vancouver Yue-Xian Li November 2, 2017 1 3.1 Exponential growth and decay A Population With Generation Overlap Consider a
Phase Locking and Dimensions Related to Highly Critical Circle Maps
 Phase Locking and Dimensions Related to Highly Critical Circle Maps Karl E. Weintraub Department of Mathematics University of Michigan Ann Arbor, MI 48109 lrak@umich.edu July 8, 2005 Abstract This article
Phase Locking and Dimensions Related to Highly Critical Circle Maps Karl E. Weintraub Department of Mathematics University of Michigan Ann Arbor, MI 48109 lrak@umich.edu July 8, 2005 Abstract This article
Nonlinear Dynamics. Moreno Marzolla Dip. di Informatica Scienza e Ingegneria (DISI) Università di Bologna.
 Università di Bologna.") Nonlinear Dynamics Moreno Marzolla Dip. di Informatica Scienza e Ingegneria (DISI) Università di Bologna http://www.moreno.marzolla.name/ 2 Introduction: Dynamics of Simple Maps 3 Dynamical systems A dynamical
Nonlinear Dynamics Moreno Marzolla Dip. di Informatica Scienza e Ingegneria (DISI) Università di Bologna http://www.moreno.marzolla.name/ 2 Introduction: Dynamics of Simple Maps 3 Dynamical systems A dynamical
The Sine Map. Jory Griffin. May 1, 2013
 The Sine Map Jory Griffin May, 23 Introduction Unimodal maps on the unit interval are among the most studied dynamical systems. Perhaps the two most frequently mentioned are the logistic map and the tent
The Sine Map Jory Griffin May, 23 Introduction Unimodal maps on the unit interval are among the most studied dynamical systems. Perhaps the two most frequently mentioned are the logistic map and the tent
Problem Set Number 2, j/2.036j MIT (Fall 2014)
") Problem Set Number 2, 18.385j/2.036j MIT (Fall 2014) Rodolfo R. Rosales (MIT, Math. Dept.,Cambridge, MA 02139) Due Mon., September 29, 2014. 1 Inverse function problem #01. Statement: Inverse function
Problem Set Number 2, 18.385j/2.036j MIT (Fall 2014) Rodolfo R. Rosales (MIT, Math. Dept.,Cambridge, MA 02139) Due Mon., September 29, 2014. 1 Inverse function problem #01. Statement: Inverse function
Nonlinear Oscillations and Chaos
 CHAPTER 4 Nonlinear Oscillations and Chaos 4-. l l = l + d s d d l l = l + d m θ m (a) (b) (c) The unetended length of each spring is, as shown in (a). In order to attach the mass m, each spring must be
CHAPTER 4 Nonlinear Oscillations and Chaos 4-. l l = l + d s d d l l = l + d m θ m (a) (b) (c) The unetended length of each spring is, as shown in (a). In order to attach the mass m, each spring must be
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: April 06, 2018, at 14 00 18 00 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: April 06, 2018, at 14 00 18 00 Johanneberg Kristian
Generalized Huberman-Rudnick scaling law and robustness of q-gaussian probability distributions. Abstract
 Generalized Huberman-Rudnick scaling law and robustness of q-gaussian probability distributions Ozgur Afsar 1, and Ugur Tirnakli 1,2, 1 Department of Physics, Faculty of Science, Ege University, 35100
Generalized Huberman-Rudnick scaling law and robustness of q-gaussian probability distributions Ozgur Afsar 1, and Ugur Tirnakli 1,2, 1 Department of Physics, Faculty of Science, Ege University, 35100
RELAXATION AND TRANSIENTS IN A TIME-DEPENDENT LOGISTIC MAP
 International Journal of Bifurcation and Chaos, Vol. 12, No. 7 (2002) 1667 1674 c World Scientific Publishing Company RELAATION AND TRANSIENTS IN A TIME-DEPENDENT LOGISTIC MAP EDSON D. LEONEL, J. KAMPHORST
International Journal of Bifurcation and Chaos, Vol. 12, No. 7 (2002) 1667 1674 c World Scientific Publishing Company RELAATION AND TRANSIENTS IN A TIME-DEPENDENT LOGISTIC MAP EDSON D. LEONEL, J. KAMPHORST
Part II. Dynamical Systems. Year
 Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 34 Paper 1, Section II 30A Consider the dynamical system where β > 1 is a constant. ẋ = x + x 3 + βxy 2, ẏ = y + βx 2
Part II Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2017 34 Paper 1, Section II 30A Consider the dynamical system where β > 1 is a constant. ẋ = x + x 3 + βxy 2, ẏ = y + βx 2
Chapter 23. Predicting Chaos The Shift Map and Symbolic Dynamics
 Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
Torus Maps from Weak Coupling of Strong Resonances
 Torus Maps from Weak Coupling of Strong Resonances John Guckenheimer Alexander I. Khibnik October 5, 1999 Abstract This paper investigates a family of diffeomorphisms of the two dimensional torus derived
Torus Maps from Weak Coupling of Strong Resonances John Guckenheimer Alexander I. Khibnik October 5, 1999 Abstract This paper investigates a family of diffeomorphisms of the two dimensional torus derived
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
Bifurcation of Fixed Points
 Bifurcation of Fixed Points CDS140B Lecturer: Wang Sang Koon Winter, 2005 1 Introduction ẏ = g(y, λ). where y R n, λ R p. Suppose it has a fixed point at (y 0, λ 0 ), i.e., g(y 0, λ 0 ) = 0. Two Questions:
Bifurcation of Fixed Points CDS140B Lecturer: Wang Sang Koon Winter, 2005 1 Introduction ẏ = g(y, λ). where y R n, λ R p. Suppose it has a fixed point at (y 0, λ 0 ), i.e., g(y 0, λ 0 ) = 0. Two Questions:
Solution to Homework #5 Roy Malka 1. Questions 2,3,4 of Homework #5 of M. Cross class. dv (x) dx
 dx") Solution to Homework #5 Roy Malka. Questions 2,,4 of Homework #5 of M. Cross class. Bifurcations: (M. Cross) Consider the bifurcations of the stationary solutions of a particle undergoing damped one dimensional
Solution to Homework #5 Roy Malka. Questions 2,,4 of Homework #5 of M. Cross class. Bifurcations: (M. Cross) Consider the bifurcations of the stationary solutions of a particle undergoing damped one dimensional
Chapter 1 Bifurcations and Chaos in Dynamical Systems
 Chapter 1 Bifurcations and Chaos in Dynamical Systems Complex system theory deals with dynamical systems containing often a large number of variables. It extends dynamical system theory, which deals with
Chapter 1 Bifurcations and Chaos in Dynamical Systems Complex system theory deals with dynamical systems containing often a large number of variables. It extends dynamical system theory, which deals with
Estimating Lyapunov Exponents from Time Series. Gerrit Ansmann
 Estimating Lyapunov Exponents from Time Series Gerrit Ansmann Example: Lorenz system. Two identical Lorenz systems with initial conditions; one is slightly perturbed (10 14 ) at t = 30: 20 x 2 1 0 20 20
Estimating Lyapunov Exponents from Time Series Gerrit Ansmann Example: Lorenz system. Two identical Lorenz systems with initial conditions; one is slightly perturbed (10 14 ) at t = 30: 20 x 2 1 0 20 20
What Every Electrical Engineer Should Know about Nonlinear Circuits and Systems
 What Every Electrical Engineer Should Know about Nonlinear Circuits and Systems Michael Peter Kennedy FIEEE University College Cork, Ireland 2013 IEEE CAS Society, Santa Clara Valley Chapter 05 August
What Every Electrical Engineer Should Know about Nonlinear Circuits and Systems Michael Peter Kennedy FIEEE University College Cork, Ireland 2013 IEEE CAS Society, Santa Clara Valley Chapter 05 August
Contents Dynamical Systems Stability of Dynamical Systems: Linear Approach
 Contents 1 Dynamical Systems... 1 1.1 Introduction... 1 1.2 DynamicalSystems andmathematical Models... 1 1.3 Kinematic Interpretation of a System of Differential Equations... 3 1.4 Definition of a Dynamical
Contents 1 Dynamical Systems... 1 1.1 Introduction... 1 1.2 DynamicalSystems andmathematical Models... 1 1.3 Kinematic Interpretation of a System of Differential Equations... 3 1.4 Definition of a Dynamical
Chapter 2 Chaos theory and its relationship to complexity
 Chapter 2 Chaos theory and its relationship to complexity David Kernick This chapter introduces chaos theory and the concept of non-linearity. It highlights the importance of reiteration and the system
Chapter 2 Chaos theory and its relationship to complexity David Kernick This chapter introduces chaos theory and the concept of non-linearity. It highlights the importance of reiteration and the system
Chaotic motion. Phys 420/580 Lecture 10
 Chaotic motion Phys 420/580 Lecture 10 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t
Chaotic motion Phys 420/580 Lecture 10 Finite-difference equations Finite difference equation approximates a differential equation as an iterative map (x n+1,v n+1 )=M[(x n,v n )] Evolution from time t
Strange Attractors and Chaotic Behavior of a Mathematical Model for a Centrifugal Filter with Feedback
 Advances in Dynamical Systems and Applications ISSN 0973-5321, Volume 4, Number 2, pp. 179 194 (2009) http://campus.mst.edu/adsa Strange Attractors and Chaotic Behavior of a Mathematical Model for a Centrifugal
Advances in Dynamical Systems and Applications ISSN 0973-5321, Volume 4, Number 2, pp. 179 194 (2009) http://campus.mst.edu/adsa Strange Attractors and Chaotic Behavior of a Mathematical Model for a Centrifugal
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: August 22, 2018, at 08 30 12 30 Johanneberg Jan Meibohm,
Lecture2 The implicit function theorem. Bifurcations.
 Lecture2 The implicit function theorem. Bifurcations. 1 Review:Newton s method. The existence theorem - the assumptions. Basins of attraction. 2 The implicit function theorem. 3 Bifurcations of iterations.
Lecture2 The implicit function theorem. Bifurcations. 1 Review:Newton s method. The existence theorem - the assumptions. Basins of attraction. 2 The implicit function theorem. 3 Bifurcations of iterations.
arxiv:cond-mat/ v1 8 Jan 2004
 Multifractality and nonextensivity at the edge of chaos of unimodal maps E. Mayoral and A. Robledo arxiv:cond-mat/0401128 v1 8 Jan 2004 Instituto de Física, Universidad Nacional Autónoma de México, Apartado
Multifractality and nonextensivity at the edge of chaos of unimodal maps E. Mayoral and A. Robledo arxiv:cond-mat/0401128 v1 8 Jan 2004 Instituto de Física, Universidad Nacional Autónoma de México, Apartado
Slow manifold structure and the emergence of mixed-mode oscillations
 Slow manifold structure and the emergence of mixed-mode oscillations Andrei Goryachev Chemical Physics Theory Group, Department of Chemistry, University of Toronto, Toronto, ON M5S 3H6, Canada Peter Strizhak
Slow manifold structure and the emergence of mixed-mode oscillations Andrei Goryachev Chemical Physics Theory Group, Department of Chemistry, University of Toronto, Toronto, ON M5S 3H6, Canada Peter Strizhak
Hamiltonian Chaos and the standard map
 Hamiltonian Chaos and the standard map Outline: What happens for small perturbation? Questions of long time stability? Poincare section and twist maps. Area preserving mappings. Standard map as time sections
Hamiltonian Chaos and the standard map Outline: What happens for small perturbation? Questions of long time stability? Poincare section and twist maps. Area preserving mappings. Standard map as time sections
Math 2 Variable Manipulation Part 7 Absolute Value & Inequalities
 Math 2 Variable Manipulation Part 7 Absolute Value & Inequalities 1 MATH 1 REVIEW SOLVING AN ABSOLUTE VALUE EQUATION Absolute value is a measure of distance; how far a number is from zero. In practice,
Math 2 Variable Manipulation Part 7 Absolute Value & Inequalities 1 MATH 1 REVIEW SOLVING AN ABSOLUTE VALUE EQUATION Absolute value is a measure of distance; how far a number is from zero. In practice,
2 Discrete Dynamical Systems: Maps
 19 2 Discrete Dynamical Systems: Maps 2.1 Introduction Many physical systems displaying chaotic behavior are accurately described by mathematical models derived from well-understood physical principles.
19 2 Discrete Dynamical Systems: Maps 2.1 Introduction Many physical systems displaying chaotic behavior are accurately described by mathematical models derived from well-understood physical principles.
Oscillatory Motion. Simple pendulum: linear Hooke s Law restoring force for small angular deviations. small angle approximation. Oscillatory solution
 Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ small angle approximation θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic
Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ small angle approximation θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic
Oscillatory Motion. Simple pendulum: linear Hooke s Law restoring force for small angular deviations. Oscillatory solution
 Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic angular frequency
Oscillatory Motion Simple pendulum: linear Hooke s Law restoring force for small angular deviations d 2 θ dt 2 = g l θ θ l Oscillatory solution θ(t) =θ 0 sin(ωt + φ) F with characteristic angular frequency
CHALMERS, GÖTEBORGS UNIVERSITET. EXAM for DYNAMICAL SYSTEMS. COURSE CODES: TIF 155, FIM770GU, PhD
 CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 08, 2018, at 08 30 12 30 Johanneberg Kristian
CHALMERS, GÖTEBORGS UNIVERSITET EXAM for DYNAMICAL SYSTEMS COURSE CODES: TIF 155, FIM770GU, PhD Time: Place: Teachers: Allowed material: Not allowed: January 08, 2018, at 08 30 12 30 Johanneberg Kristian
Physics 106b: Lecture 7 25 January, 2018
 Physics 106b: Lecture 7 25 January, 2018 Hamiltonian Chaos: Introduction Integrable Systems We start with systems that do not exhibit chaos, but instead have simple periodic motion (like the SHO) with
Physics 106b: Lecture 7 25 January, 2018 Hamiltonian Chaos: Introduction Integrable Systems We start with systems that do not exhibit chaos, but instead have simple periodic motion (like the SHO) with
Higher Portfolio Quadratics and Polynomials
 Higher Portfolio Quadratics and Polynomials Higher 5. Quadratics and Polynomials Section A - Revision Section This section will help you revise previous learning which is required in this topic R1 I have
Higher Portfolio Quadratics and Polynomials Higher 5. Quadratics and Polynomials Section A - Revision Section This section will help you revise previous learning which is required in this topic R1 I have
AP * Calculus Review. Limits, Continuity, and the Definition of the Derivative
 AP * Calculus Review Limits, Continuity, and the Definition of the Derivative Teacher Packet Advanced Placement and AP are registered trademark of the College Entrance Examination Board. The College Board
AP * Calculus Review Limits, Continuity, and the Definition of the Derivative Teacher Packet Advanced Placement and AP are registered trademark of the College Entrance Examination Board. The College Board
Dynamical Systems: Lecture 1 Naima Hammoud
 Dynamical Systems: Lecture 1 Naima Hammoud Feb 21, 2017 What is dynamics? Dynamics is the study of systems that evolve in time What is dynamics? Dynamics is the study of systems that evolve in time a system
Dynamical Systems: Lecture 1 Naima Hammoud Feb 21, 2017 What is dynamics? Dynamics is the study of systems that evolve in time What is dynamics? Dynamics is the study of systems that evolve in time a system
Invariant manifolds of the Bonhoeffer-van der Pol oscillator
 Invariant manifolds of the Bonhoeffer-van der Pol oscillator R. Benítez 1, V. J. Bolós 2 1 Dpto. Matemáticas, Centro Universitario de Plasencia, Universidad de Extremadura. Avda. Virgen del Puerto 2. 10600,
Invariant manifolds of the Bonhoeffer-van der Pol oscillator R. Benítez 1, V. J. Bolós 2 1 Dpto. Matemáticas, Centro Universitario de Plasencia, Universidad de Extremadura. Avda. Virgen del Puerto 2. 10600,
( ) f ( x 1 ) . x 2. To find the average rate of change, use the slope formula, m = f x 2
 f ( x 1 ) . x 2. To find the average rate of change, use the slope formula, m = f x 2") Common Core Regents Review Functions Quadratic Functions (Graphs) A quadratic function has the form y = ax 2 + bx + c. It is an equation with a degree of two because its highest exponent is 2. The graph
Common Core Regents Review Functions Quadratic Functions (Graphs) A quadratic function has the form y = ax 2 + bx + c. It is an equation with a degree of two because its highest exponent is 2. The graph
2 Qualitative theory of non-smooth dynamical systems
 2 Qualitative theory of non-smooth dynamical systems In this chapter, we give an overview of the basic theory of both smooth and non-smooth dynamical systems, to be expanded upon in later chapters. In
2 Qualitative theory of non-smooth dynamical systems In this chapter, we give an overview of the basic theory of both smooth and non-smooth dynamical systems, to be expanded upon in later chapters. In
Simplest Chaotic Flows with Involutional Symmetries
 International Journal of Bifurcation and Chaos, Vol. 24, No. 1 (2014) 1450009 (9 pages) c World Scientific Publishing Company DOI: 10.1142/S0218127414500096 Simplest Chaotic Flows with Involutional Symmetries
International Journal of Bifurcation and Chaos, Vol. 24, No. 1 (2014) 1450009 (9 pages) c World Scientific Publishing Company DOI: 10.1142/S0218127414500096 Simplest Chaotic Flows with Involutional Symmetries
ONE DIMENSIONAL CHAOTIC DYNAMICAL SYSTEMS
 Journal of Pure and Applied Mathematics: Advances and Applications Volume 0 Number 0 Pages 69-0 ONE DIMENSIONAL CHAOTIC DYNAMICAL SYSTEMS HENA RANI BISWAS Department of Mathematics University of Barisal
Journal of Pure and Applied Mathematics: Advances and Applications Volume 0 Number 0 Pages 69-0 ONE DIMENSIONAL CHAOTIC DYNAMICAL SYSTEMS HENA RANI BISWAS Department of Mathematics University of Barisal
Self-Replication, Self-Destruction, and Spatio-Temporal Chaos in the Gray-Scott Model
 Letter Forma, 15, 281 289, 2000 Self-Replication, Self-Destruction, and Spatio-Temporal Chaos in the Gray-Scott Model Yasumasa NISHIURA 1 * and Daishin UEYAMA 2 1 Laboratory of Nonlinear Studies and Computations,
Letter Forma, 15, 281 289, 2000 Self-Replication, Self-Destruction, and Spatio-Temporal Chaos in the Gray-Scott Model Yasumasa NISHIURA 1 * and Daishin UEYAMA 2 1 Laboratory of Nonlinear Studies and Computations,