Math 5490 November 5, 2014
|
|
|
- Loren Watkins
- 5 years ago
- Views:
Transcription

1 Math 549 November 5, 214 Topics in Applied Mathematics: Introduction to the Mathematics of Climate Mondays and Wednesdays 2:3 3:45 Streaming video is available at Click on the link: "Live Streaming from 35 Lind Hall". Participation:



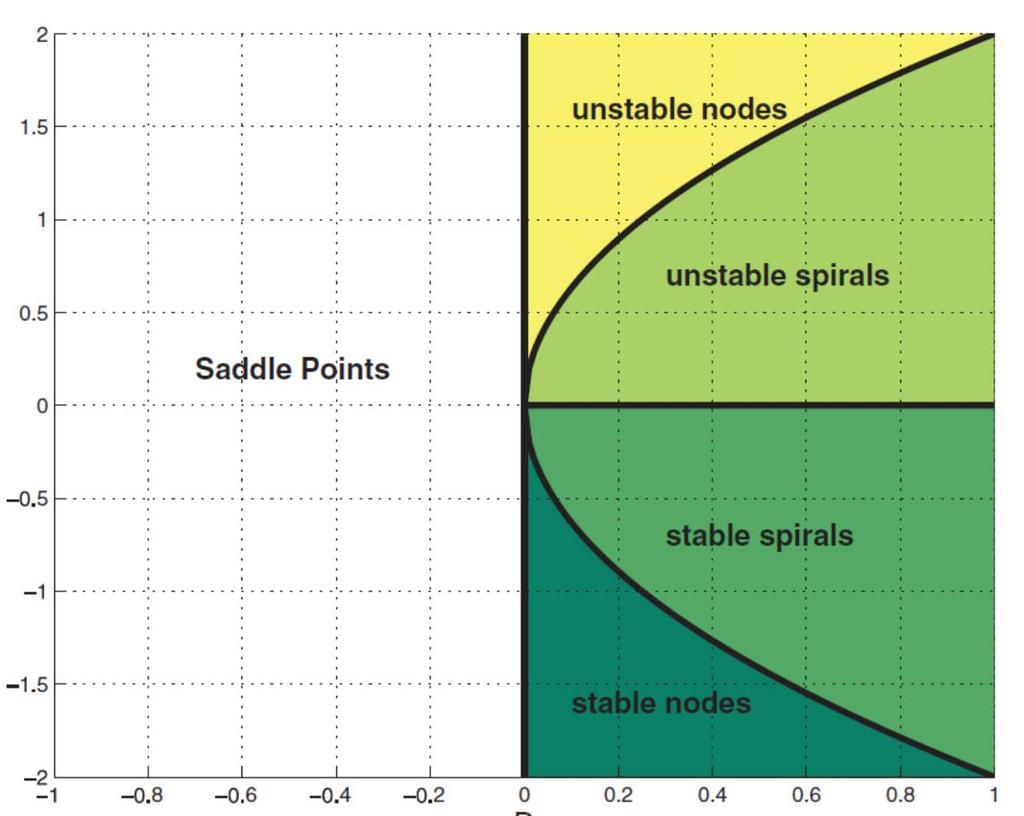
2 Classification trace determinant Kaper & Engler, 213
3 Topological Classification If neither eigenvalue has zero real part, then the system is called hyperbolic, in which case, there are only three classes: 1. saddles: One positive eigenvalue and one negative. The determinant is negative. 2. sources: Both eigenvalues have positive real part. The determinant is positive, and the trace is positive. 3. sinks: Both eigenvalues have negative real part. The determinant is positive, and the trace is negative. Every system in one of the three categories looks the same to a topologist (topological conjugacy).
4 Topological Classification saddle source trace sink determinant
5 Topological Classification Saddles : det < saddle source trace/ trace determinant 1 sink 1 determinant
6 Topological Classification Saddles : det < source saddle trace sink determinant
7 Topological Classification Sources det >, trace > saddle source trace trace determinant 1 sink 1 determinant
8 Topological Classification Sources det >, trace > source saddle trace sink determinant
9 Topological Classification Sinks det >, trace < saddle source trace trace determinant 1 sink 1 determinant
10 Topological Classification Sinks det >, trace < source saddle trace sink determinant
11 Topological Classification All sources look the same. Everything leaves.
12 Topological Classification All sinks look the same. Everything approaches the origin asymptotically.
13 Topological Classification One Variable x u u Let x u u u u u u 1 du u x u du u 1 Continuous, but not smooth at. u x du 1 du u u x 1 x u u du u
14 Topological Classification Two Variables Saddles dy x x 1 x u u 1 y v v du dv u v Continuous, but not smooth at (,). topologically conjugate
15 Topological Classification Sinks dy x x 1 x u u 1 y v v du dv u v Continuous, but not smooth at (,). topologically conjugate
16 Topological Classification What about spirals? dz ( 1 ) ix i ilog w z w we w Continuous, but not smooth at. dw w
17 Topological Classification Computation i dz i i 21 ( 1 iz ) ( ) i i 2 i 2 i 21 i i 2 i 2 z w w ww w w w dz z w ww w w w 2 2 i Multiply by w w i i i 1 i w 2 w w w w 2 w complex conjugate i i (1 iz ) (1 i) w w 1 ww i ww (1 i) ww ww ww 2ww i i 1 ww ww 2 ww (1 i) ww i i 2 2 ww 1 ww (1 i) ww ww ww 2ww ww iww (1 i) ww ww ww dw w add
18 Topological Classification What about spirals? dz ( 1 ) ix i ilog w z w we w Continuous, but not smooth at. dw w
19 Topological Classification All sinks are topologically conjugate, as are all sources and all saddles.
20 Topological Classification saddle source trace sink determinant
21 Rest points: Dynamical Systems Nonlinear Systems One Variable f ( x) f( x) If f( p), then x( t) p (constant) is a solution. Example x x 3 Rest points: 3 x x x 1 x 1 x 1,, and 1
22 Nonlinear Systems One Variable Rest points Example 2 x x 3 1 f(x) What about the stability of the rest points? x
23 Nonlinear Systems One Variable Rest points Example 2 x x 3 1 f(x) What about the stability of the rest points? x
24 Nonlinear Systems f ( x) Rest point p : f( p) Linear approximation: f ( x) f ( p) f ( p)( x p) f ( p)( x p) Introduce x p. Then f( x) f( p ) f( p) d f( x) f( p ) f( p) Basic Idea If is small, i.e., if x is close to p, d then solutions of f( p) d are close to solutions of f ( p). In particular, the rest point p is asymptotically stable for f ( x) d if the origin is asymptotically stable for f( p).
25 Nonlinear Systems f ( x) Rest point p : f( p) Criteria The rest point p is asymptotically stable for f( x) if f( p). It is unstable if f( p).
26 Nonlinear Systems Example f ( x) x x 3 2 stable Rest points: 1,, and 1 f( x) 13x f( 1) f(1) 2, f() 1 Rest points 1 and 1 are stable, rest point is unstable. 2 f(x) x unstable
27 Nonlinear Systems Two Variables 1 f1( x1, x2) 2 f2( x1, x2) f( x), x, f : f( x) If f( p), then x( t) p (constant) is a solution (rest point) f( p) f ( p, p ) f ( p, p ) x () t p 1 1 x () t p 1 1
28 Nonlinear Systems dy Example 3 x x y y Rest points: x x 3 y x x 3 x 1 x 1 x y y y ( 1,), (,), and (1,)
29 If y(), then y( t), for all t. invariant line : x axis Dynamical Systems Nonlinear Systems Example dy 3 x x y y y rest points x How do we analyze the full system?
30 Nonlinear Systems 3 x x y dy y Preview
31 Nonlinear Systems Jacobian Matrix 1 2 f ( x, x ) f ( x, x ) f( x), x, f : Df ( x) f1 f1 ( x1, x2) ( x1, x2) x1 x 2 f2 f ( x 2 1, x2) ( x1, x2) x1 x 2
32 Nonlinear Systems Example dy 3 x x y y Df ( x, y) 2 1 3x Df ( 1,) Df (,) Df (1,) 1 1 1
33 Nonlinear Systems f ( x) Rest point p : f( p) Linear approximation: f ( x) f ( p) Df ( p)( x p) Df ( p)( x p) Introduce x p. Then f( x) f( p ) Df( p) d f( x) f( p ) Df( p) Basic Idea If is small, i.e., if x is close to p, d then solutions of f( p) d are close to solutions of Df ( p). In particular, the rest point p is asymptotically stable for f ( x) d if the origin is asymptotically stable for Df ( p).
34 Nonlinear Systems f ( x) Rest point p : f( p) Criteria The rest point p is saddle for f( x) if det D f( p). It is a source if det D ( ) and trace D ( ). f p f p f p f p It is a source if det D ( ) and trace D ( ).
35 dy Dynamical Systems 3 x x y y Nonlinear Systems Example Rest points: ( 1,), (,), and (1,) Df ( 1,) Df (,) Df (1,) det D f ( 1,) 2 trace D f ( 1,) 3 sink 2 discriminant D f ( 1,) ( 3) det D f (,) 1 saddle stable node
36 If y(), then y( t), for all t. invariant line : x axis Dynamical Systems Nonlinear Systems Example dy 3 x x y y y rest points x stable node saddle
Math 5490 November 12, 2014
 Math 5490 November 12, 2014 Topics in Applied Mathematics: Introduction to the Mathematics of Climate Mondays and Wednesdays 2:30 3:45 http://www.math.umn.edu/~mcgehee/teaching/math5490-2014-2fall/ Streaming
Math 5490 November 12, 2014 Topics in Applied Mathematics: Introduction to the Mathematics of Climate Mondays and Wednesdays 2:30 3:45 http://www.math.umn.edu/~mcgehee/teaching/math5490-2014-2fall/ Streaming
Math 312 Lecture Notes Linearization
 Math 3 Lecture Notes Linearization Warren Weckesser Department of Mathematics Colgate University 3 March 005 These notes discuss linearization, in which a linear system is used to approximate the behavior
Math 3 Lecture Notes Linearization Warren Weckesser Department of Mathematics Colgate University 3 March 005 These notes discuss linearization, in which a linear system is used to approximate the behavior
Def. (a, b) is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)
 is a critical point of the autonomous system. 1 Proper node (stable or unstable) 2 Improper node (stable or unstable)") Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
Types of critical points Def. (a, b) is a critical point of the autonomous system Math 216 Differential Equations Kenneth Harris kaharri@umich.edu Department of Mathematics University of Michigan November
Nonlinear Autonomous Dynamical systems of two dimensions. Part A
 Nonlinear Autonomous Dynamical systems of two dimensions Part A Nonlinear Autonomous Dynamical systems of two dimensions x f ( x, y), x(0) x vector field y g( xy, ), y(0) y F ( f, g) 0 0 f, g are continuous
Nonlinear Autonomous Dynamical systems of two dimensions Part A Nonlinear Autonomous Dynamical systems of two dimensions x f ( x, y), x(0) x vector field y g( xy, ), y(0) y F ( f, g) 0 0 f, g are continuous
Autonomous systems. Ordinary differential equations which do not contain the independent variable explicitly are said to be autonomous.
 Autonomous equations Autonomous systems Ordinary differential equations which do not contain the independent variable explicitly are said to be autonomous. i f i(x 1, x 2,..., x n ) for i 1,..., n As you
Autonomous equations Autonomous systems Ordinary differential equations which do not contain the independent variable explicitly are said to be autonomous. i f i(x 1, x 2,..., x n ) for i 1,..., n As you
2.10 Saddles, Nodes, Foci and Centers
 2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
2.10 Saddles, Nodes, Foci and Centers In Section 1.5, a linear system (1 where x R 2 was said to have a saddle, node, focus or center at the origin if its phase portrait was linearly equivalent to one
Phase Plane Analysis
 Phase Plane Analysis Phase plane analysis is one of the most important techniques for studying the behavior of nonlinear systems, since there is usually no analytical solution for a nonlinear system. Background
Phase Plane Analysis Phase plane analysis is one of the most important techniques for studying the behavior of nonlinear systems, since there is usually no analytical solution for a nonlinear system. Background
Chapter 6 Nonlinear Systems and Phenomena. Friday, November 2, 12
 Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
Chapter 6 Nonlinear Systems and Phenomena 6.1 Stability and the Phase Plane We now move to nonlinear systems Begin with the first-order system for x(t) d dt x = f(x,t), x(0) = x 0 In particular, consider
Problem set 7 Math 207A, Fall 2011 Solutions
 Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Problem set 7 Math 207A, Fall 2011 s 1. Classify the equilibrium (x, y) = (0, 0) of the system x t = x, y t = y + x 2. Is the equilibrium hyperbolic? Find an equation for the trajectories in (x, y)- phase
Lecture 38. Almost Linear Systems
 Math 245 - Mathematics of Physics and Engineering I Lecture 38. Almost Linear Systems April 20, 2012 Konstantin Zuev (USC) Math 245, Lecture 38 April 20, 2012 1 / 11 Agenda Stability Properties of Linear
Math 245 - Mathematics of Physics and Engineering I Lecture 38. Almost Linear Systems April 20, 2012 Konstantin Zuev (USC) Math 245, Lecture 38 April 20, 2012 1 / 11 Agenda Stability Properties of Linear
Math 3301 Homework Set Points ( ) ( ) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, ( ) ( ) ( ) ( )
 ( ) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, ( ) ( ) ( ) ( )") #7. ( pts) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, λ 5 λ 7 t t ce The general solution is then : 5 7 c c c x( 0) c c 9 9 c+ c c t 5t 7 e + e A sketch of
#7. ( pts) I ll leave it to you to verify that the eigenvalues and eigenvectors for this matrix are, λ 5 λ 7 t t ce The general solution is then : 5 7 c c c x( 0) c c 9 9 c+ c c t 5t 7 e + e A sketch of
Classification of Phase Portraits at Equilibria for u (t) = f( u(t))
 = f( u(t))") Classification of Phase Portraits at Equilibria for u t = f ut Transfer of Local Linearized Phase Portrait Transfer of Local Linearized Stability How to Classify Linear Equilibria Justification of the
Classification of Phase Portraits at Equilibria for u t = f ut Transfer of Local Linearized Phase Portrait Transfer of Local Linearized Stability How to Classify Linear Equilibria Justification of the
Continuous Threshold Policy Harvesting in Predator-Prey Models
 Continuous Threshold Policy Harvesting in Predator-Prey Models Jon Bohn and Kaitlin Speer Department of Mathematics, University of Wisconsin - Madison Department of Mathematics, Baylor University July
Continuous Threshold Policy Harvesting in Predator-Prey Models Jon Bohn and Kaitlin Speer Department of Mathematics, University of Wisconsin - Madison Department of Mathematics, Baylor University July
1 Introduction Definitons Markov... 2
 Compact course notes Dynamic systems Fall 2011 Professor: Y. Kudryashov transcribed by: J. Lazovskis Independent University of Moscow December 23, 2011 Contents 1 Introduction 2 1.1 Definitons...............................................
Compact course notes Dynamic systems Fall 2011 Professor: Y. Kudryashov transcribed by: J. Lazovskis Independent University of Moscow December 23, 2011 Contents 1 Introduction 2 1.1 Definitons...............................................
Calculus and Differential Equations II
 MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
MATH 250 B Second order autonomous linear systems We are mostly interested with 2 2 first order autonomous systems of the form { x = a x + b y y = c x + d y where x and y are functions of t and a, b, c,
Nonlinear Dynamics of Neural Firing
 Nonlinear Dynamics of Neural Firing BENG/BGGN 260 Neurodynamics University of California, San Diego Week 3 BENG/BGGN 260 Neurodynamics (UCSD) Nonlinear Dynamics of Neural Firing Week 3 1 / 16 Reading Materials
Nonlinear Dynamics of Neural Firing BENG/BGGN 260 Neurodynamics University of California, San Diego Week 3 BENG/BGGN 260 Neurodynamics (UCSD) Nonlinear Dynamics of Neural Firing Week 3 1 / 16 Reading Materials
Find the general solution of the system y = Ay, where
 Math Homework # March, 9..3. Find the general solution of the system y = Ay, where 5 Answer: The matrix A has characteristic polynomial p(λ = λ + 7λ + = λ + 3(λ +. Hence the eigenvalues are λ = 3and λ
Math Homework # March, 9..3. Find the general solution of the system y = Ay, where 5 Answer: The matrix A has characteristic polynomial p(λ = λ + 7λ + = λ + 3(λ +. Hence the eigenvalues are λ = 3and λ
ODE, part 2. Dynamical systems, differential equations
 ODE, part 2 Anna-Karin Tornberg Mathematical Models, Analysis and Simulation Fall semester, 2011 Dynamical systems, differential equations Consider a system of n first order equations du dt = f(u, t),
ODE, part 2 Anna-Karin Tornberg Mathematical Models, Analysis and Simulation Fall semester, 2011 Dynamical systems, differential equations Consider a system of n first order equations du dt = f(u, t),
MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation.
 MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation. Bifurcation theory The object of bifurcation theory is to study changes that maps undergo
MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation. Bifurcation theory The object of bifurcation theory is to study changes that maps undergo
MathQuest: Differential Equations
 MathQuest: Differential Equations Geometry of Systems 1. The differential equation d Y dt = A Y has two straight line solutions corresponding to [ ] [ ] 1 1 eigenvectors v 1 = and v 2 2 = that are shown
MathQuest: Differential Equations Geometry of Systems 1. The differential equation d Y dt = A Y has two straight line solutions corresponding to [ ] [ ] 1 1 eigenvectors v 1 = and v 2 2 = that are shown
Math 331 Homework Assignment Chapter 7 Page 1 of 9
 Math Homework Assignment Chapter 7 Page of 9 Instructions: Please make sure to demonstrate every step in your calculations. Return your answers including this homework sheet back to the instructor as a
Math Homework Assignment Chapter 7 Page of 9 Instructions: Please make sure to demonstrate every step in your calculations. Return your answers including this homework sheet back to the instructor as a
April 13, We now extend the structure of the horseshoe to more general kinds of invariant. x (v) λ n v.
 λ n v.") April 3, 005 - Hyperbolic Sets We now extend the structure of the horseshoe to more general kinds of invariant sets. Let r, and let f D r (M) where M is a Riemannian manifold. A compact f invariant set
April 3, 005 - Hyperbolic Sets We now extend the structure of the horseshoe to more general kinds of invariant sets. Let r, and let f D r (M) where M is a Riemannian manifold. A compact f invariant set
3 Stability and Lyapunov Functions
 CDS140a Nonlinear Systems: Local Theory 02/01/2011 3 Stability and Lyapunov Functions 3.1 Lyapunov Stability Denition: An equilibrium point x 0 of (1) is stable if for all ɛ > 0, there exists a δ > 0 such
CDS140a Nonlinear Systems: Local Theory 02/01/2011 3 Stability and Lyapunov Functions 3.1 Lyapunov Stability Denition: An equilibrium point x 0 of (1) is stable if for all ɛ > 0, there exists a δ > 0 such
Math 1270 Honors ODE I Fall, 2008 Class notes # 14. x 0 = F (x; y) y 0 = G (x; y) u 0 = au + bv = cu + dv
 y 0 = G (x; y) u 0 = au + bv = cu + dv") Math 1270 Honors ODE I Fall, 2008 Class notes # 1 We have learned how to study nonlinear systems x 0 = F (x; y) y 0 = G (x; y) (1) by linearizing around equilibrium points. If (x 0 ; y 0 ) is an equilibrium
Math 1270 Honors ODE I Fall, 2008 Class notes # 1 We have learned how to study nonlinear systems x 0 = F (x; y) y 0 = G (x; y) (1) by linearizing around equilibrium points. If (x 0 ; y 0 ) is an equilibrium
Di erential Equations
 9.3 Math 3331 Di erential Equations 9.3 Phase Plane Portraits Jiwen He Department of Mathematics, University of Houston jiwenhe@math.uh.edu math.uh.edu/ jiwenhe/math3331 Jiwen He, University of Houston
9.3 Math 3331 Di erential Equations 9.3 Phase Plane Portraits Jiwen He Department of Mathematics, University of Houston jiwenhe@math.uh.edu math.uh.edu/ jiwenhe/math3331 Jiwen He, University of Houston
Physics: spring-mass system, planet motion, pendulum. Biology: ecology problem, neural conduction, epidemics
 Applications of nonlinear ODE systems: Physics: spring-mass system, planet motion, pendulum Chemistry: mixing problems, chemical reactions Biology: ecology problem, neural conduction, epidemics Economy:
Applications of nonlinear ODE systems: Physics: spring-mass system, planet motion, pendulum Chemistry: mixing problems, chemical reactions Biology: ecology problem, neural conduction, epidemics Economy:
Math 266: Phase Plane Portrait
 Math 266: Phase Plane Portrait Long Jin Purdue, Spring 2018 Review: Phase line for an autonomous equation For a single autonomous equation y = f (y) we used a phase line to illustrate the equilibrium solutions
Math 266: Phase Plane Portrait Long Jin Purdue, Spring 2018 Review: Phase line for an autonomous equation For a single autonomous equation y = f (y) we used a phase line to illustrate the equilibrium solutions
0 as an eigenvalue. degenerate
 Math 1 Topics since the third exam Chapter 9: Non-linear Sstems of equations x1: Tpical Phase Portraits The structure of the solutions to a linear, constant coefficient, sstem of differential equations
Math 1 Topics since the third exam Chapter 9: Non-linear Sstems of equations x1: Tpical Phase Portraits The structure of the solutions to a linear, constant coefficient, sstem of differential equations
Chapter 9 Global Nonlinear Techniques
 Chapter 9 Global Nonlinear Techniques Consider nonlinear dynamical system 0 Nullcline X 0 = F (X) = B @ f 1 (X) f 2 (X). f n (X) x j nullcline = fx : f j (X) = 0g equilibrium solutions = intersection of
Chapter 9 Global Nonlinear Techniques Consider nonlinear dynamical system 0 Nullcline X 0 = F (X) = B @ f 1 (X) f 2 (X). f n (X) x j nullcline = fx : f j (X) = 0g equilibrium solutions = intersection of
Math 215/255: Elementary Differential Equations I Harish N Dixit, Department of Mathematics, UBC
 Math 215/255: Elementary Differential Equations I Harish N Dixit, Department of Mathematics, UBC First Order Equations Linear Equations y + p(x)y = q(x) Write the equation in the standard form, Calculate
Math 215/255: Elementary Differential Equations I Harish N Dixit, Department of Mathematics, UBC First Order Equations Linear Equations y + p(x)y = q(x) Write the equation in the standard form, Calculate
= F ( x; µ) (1) where x is a 2-dimensional vector, µ is a parameter, and F :
 (1) where x is a 2-dimensional vector, µ is a parameter, and F :") 1 Bifurcations Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 A bifurcation is a qualitative change
1 Bifurcations Richard Bertram Department of Mathematics and Programs in Neuroscience and Molecular Biophysics Florida State University Tallahassee, Florida 32306 A bifurcation is a qualitative change
MATH 215/255 Solutions to Additional Practice Problems April dy dt
 . For the nonlinear system MATH 5/55 Solutions to Additional Practice Problems April 08 dx dt = x( x y, dy dt = y(.5 y x, x 0, y 0, (a Show that if x(0 > 0 and y(0 = 0, then the solution (x(t, y(t of the
. For the nonlinear system MATH 5/55 Solutions to Additional Practice Problems April 08 dx dt = x( x y, dy dt = y(.5 y x, x 0, y 0, (a Show that if x(0 > 0 and y(0 = 0, then the solution (x(t, y(t of the
Section 5.4 (Systems of Linear Differential Equation); 9.5 Eigenvalues and Eigenvectors, cont d
; 9.5 Eigenvalues and Eigenvectors, cont d") Section 5.4 (Systems of Linear Differential Equation); 9.5 Eigenvalues and Eigenvectors, cont d July 6, 2009 Today s Session Today s Session A Summary of This Session: Today s Session A Summary of This
Section 5.4 (Systems of Linear Differential Equation); 9.5 Eigenvalues and Eigenvectors, cont d July 6, 2009 Today s Session Today s Session A Summary of This Session: Today s Session A Summary of This
Student name: Student ID: Math 265 (Butler) Midterm III, 10 November 2011
 Midterm III, 10 November 2011") Student name: Student ID: Math 265 (Butler) Midterm III, November 2 This test is closed book and closed notes. No calculator is allowed for this test. For full credit show all of your work (legibly!).
Student name: Student ID: Math 265 (Butler) Midterm III, November 2 This test is closed book and closed notes. No calculator is allowed for this test. For full credit show all of your work (legibly!).
Hello everyone, Best, Josh
 Hello everyone, As promised, the chart mentioned in class about what kind of critical points you get with different types of eigenvalues are included on the following pages (The pages are an ecerpt from
Hello everyone, As promised, the chart mentioned in class about what kind of critical points you get with different types of eigenvalues are included on the following pages (The pages are an ecerpt from
7 Planar systems of linear ODE
 7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
1. For each function, find all of its critical points and then classify each point as a local extremum or saddle point.
 Solutions Review for Exam # Math 6. For each function, find all of its critical points and then classify each point as a local extremum or saddle point. a fx, y x + 6xy + y Solution.The gradient of f is
Solutions Review for Exam # Math 6. For each function, find all of its critical points and then classify each point as a local extremum or saddle point. a fx, y x + 6xy + y Solution.The gradient of f is
6.3. Nonlinear Systems of Equations
 G. NAGY ODE November,.. Nonlinear Systems of Equations Section Objective(s): Part One: Two-Dimensional Nonlinear Systems. ritical Points and Linearization. The Hartman-Grobman Theorem. Part Two: ompeting
G. NAGY ODE November,.. Nonlinear Systems of Equations Section Objective(s): Part One: Two-Dimensional Nonlinear Systems. ritical Points and Linearization. The Hartman-Grobman Theorem. Part Two: ompeting
ENGI Linear Approximation (2) Page Linear Approximation to a System of Non-Linear ODEs (2)
 Page Linear Approximation to a System of Non-Linear ODEs (2)") ENGI 940 4.06 - Linear Approximation () Page 4. 4.06 Linear Approximation to a System of Non-Linear ODEs () From sections 4.0 and 4.0, the non-linear system dx dy = x = P( x, y), = y = Q( x, y) () with
ENGI 940 4.06 - Linear Approximation () Page 4. 4.06 Linear Approximation to a System of Non-Linear ODEs () From sections 4.0 and 4.0, the non-linear system dx dy = x = P( x, y), = y = Q( x, y) () with
Vectors, matrices, eigenvalues and eigenvectors
 Vectors, matrices, eigenvalues and eigenvectors 1 ( ) ( ) ( ) Scaling a vector: 0.5V 2 0.5 2 1 = 0.5 = = 1 0.5 1 0.5 ( ) ( ) ( ) ( ) Adding two vectors: V + W 2 1 2 + 1 3 = + = = 1 3 1 + 3 4 ( ) ( ) a
Vectors, matrices, eigenvalues and eigenvectors 1 ( ) ( ) ( ) Scaling a vector: 0.5V 2 0.5 2 1 = 0.5 = = 1 0.5 1 0.5 ( ) ( ) ( ) ( ) Adding two vectors: V + W 2 1 2 + 1 3 = + = = 1 3 1 + 3 4 ( ) ( ) a
An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems
 An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems Scott Zimmerman MATH181HM: Dynamical Systems Spring 2008 1 Introduction The Hartman-Grobman and Poincaré-Bendixon Theorems
An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems Scott Zimmerman MATH181HM: Dynamical Systems Spring 2008 1 Introduction The Hartman-Grobman and Poincaré-Bendixon Theorems
Stability of Dynamical systems
 Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
Stability of Dynamical systems Stability Isolated equilibria Classification of Isolated Equilibria Attractor and Repeller Almost linear systems Jacobian Matrix Stability Consider an autonomous system u
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 The pendulum equation
 Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Problem set 6 Math 207A, Fall 2011 Solutions. 1. A two-dimensional gradient system has the form
 Problem set 6 Math 207A, Fall 2011 s 1 A two-dimensional gradient sstem has the form x t = W (x,, x t = W (x, where W (x, is a given function (a If W is a quadratic function W (x, = 1 2 ax2 + bx + 1 2
Problem set 6 Math 207A, Fall 2011 s 1 A two-dimensional gradient sstem has the form x t = W (x,, x t = W (x, where W (x, is a given function (a If W is a quadratic function W (x, = 1 2 ax2 + bx + 1 2
Vector Field Topology. Ronald Peikert SciVis Vector Field Topology 8-1
 Vector Field Topology Ronald Peikert SciVis 2007 - Vector Field Topology 8-1 Vector fields as ODEs What are conditions for existence and uniqueness of streamlines? For the initial value problem i x ( t)
Vector Field Topology Ronald Peikert SciVis 2007 - Vector Field Topology 8-1 Vector fields as ODEs What are conditions for existence and uniqueness of streamlines? For the initial value problem i x ( t)
Math 232, Final Test, 20 March 2007
 Math 232, Final Test, 20 March 2007 Name: Instructions. Do any five of the first six questions, and any five of the last six questions. Please do your best, and show all appropriate details in your solutions.
Math 232, Final Test, 20 March 2007 Name: Instructions. Do any five of the first six questions, and any five of the last six questions. Please do your best, and show all appropriate details in your solutions.
MTH4101 CALCULUS II REVISION NOTES. 1. COMPLEX NUMBERS (Thomas Appendix 7 + lecture notes) ax 2 + bx + c = 0. x = b ± b 2 4ac 2a. i = 1.
 ax 2 + bx + c = 0. x = b ± b 2 4ac 2a. i = 1.") MTH4101 CALCULUS II REVISION NOTES 1. COMPLEX NUMBERS (Thomas Appendix 7 + lecture notes) 1.1 Introduction Types of numbers (natural, integers, rationals, reals) The need to solve quadratic equations:
MTH4101 CALCULUS II REVISION NOTES 1. COMPLEX NUMBERS (Thomas Appendix 7 + lecture notes) 1.1 Introduction Types of numbers (natural, integers, rationals, reals) The need to solve quadratic equations:
Math 4B Notes. Written by Victoria Kala SH 6432u Office Hours: T 12:45 1:45pm Last updated 7/24/2016
 Math 4B Notes Written by Victoria Kala vtkala@math.ucsb.edu SH 6432u Office Hours: T 2:45 :45pm Last updated 7/24/206 Classification of Differential Equations The order of a differential equation is the
Math 4B Notes Written by Victoria Kala vtkala@math.ucsb.edu SH 6432u Office Hours: T 2:45 :45pm Last updated 7/24/206 Classification of Differential Equations The order of a differential equation is the
PHY411 Lecture notes Part 5
 PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
MAT 22B - Lecture Notes
 MAT 22B - Lecture Notes 4 September 205 Solving Systems of ODE Last time we talked a bit about how systems of ODE arise and why they are nice for visualization. Now we'll talk about the basics of how to
MAT 22B - Lecture Notes 4 September 205 Solving Systems of ODE Last time we talked a bit about how systems of ODE arise and why they are nice for visualization. Now we'll talk about the basics of how to
8 Vector Field Topology
 Vector fields as ODEs What are conditions for eistence and uniqueness of streamlines? 8 Vector Field Topology For the initial value problem ( t) = v( ( t) ) i t = 0 0 a solution eists if the velocity field
Vector fields as ODEs What are conditions for eistence and uniqueness of streamlines? 8 Vector Field Topology For the initial value problem ( t) = v( ( t) ) i t = 0 0 a solution eists if the velocity field
Models Involving Interactions between Predator and Prey Populations
 Models Involving Interactions between Predator and Prey Populations Matthew Mitchell Georgia College and State University December 30, 2015 Abstract Predator-prey models are used to show the intricate
Models Involving Interactions between Predator and Prey Populations Matthew Mitchell Georgia College and State University December 30, 2015 Abstract Predator-prey models are used to show the intricate
MATH 251 Final Examination December 16, 2015 FORM A. Name: Student Number: Section:
 MATH 5 Final Examination December 6, 5 FORM A Name: Student Number: Section: This exam has 7 questions for a total of 5 points. In order to obtain full credit for partial credit problems, all work must
MATH 5 Final Examination December 6, 5 FORM A Name: Student Number: Section: This exam has 7 questions for a total of 5 points. In order to obtain full credit for partial credit problems, all work must
Some Dynamical Behaviors In Lorenz Model
 International Journal Of Computational Engineering Research (ijceronline.com) Vol. Issue. 7 Some Dynamical Behaviors In Lorenz Model Dr. Nabajyoti Das Assistant Professor, Department of Mathematics, Jawaharlal
International Journal Of Computational Engineering Research (ijceronline.com) Vol. Issue. 7 Some Dynamical Behaviors In Lorenz Model Dr. Nabajyoti Das Assistant Professor, Department of Mathematics, Jawaharlal
DYNAMICAL SYSTEMS. I Clark: Robinson. Stability, Symbolic Dynamics, and Chaos. CRC Press Boca Raton Ann Arbor London Tokyo
 DYNAMICAL SYSTEMS Stability, Symbolic Dynamics, and Chaos I Clark: Robinson CRC Press Boca Raton Ann Arbor London Tokyo Contents Chapter I. Introduction 1 1.1 Population Growth Models, One Population 2
DYNAMICAL SYSTEMS Stability, Symbolic Dynamics, and Chaos I Clark: Robinson CRC Press Boca Raton Ann Arbor London Tokyo Contents Chapter I. Introduction 1 1.1 Population Growth Models, One Population 2
Kinematics of fluid motion
 Chapter 4 Kinematics of fluid motion 4.1 Elementary flow patterns Recall the discussion of flow patterns in Chapter 1. The equations for particle paths in a three-dimensional, steady fluid flow are dx
Chapter 4 Kinematics of fluid motion 4.1 Elementary flow patterns Recall the discussion of flow patterns in Chapter 1. The equations for particle paths in a three-dimensional, steady fluid flow are dx
Local Phase Portrait of Nonlinear Systems Near Equilibria
 Local Phase Portrait of Nonlinear Sstems Near Equilibria [1] Consider 1 = 6 1 1 3 1, = 3 1. ( ) (a) Find all equilibrium solutions of the sstem ( ). (b) For each equilibrium point, give the linear approimating
Local Phase Portrait of Nonlinear Sstems Near Equilibria [1] Consider 1 = 6 1 1 3 1, = 3 1. ( ) (a) Find all equilibrium solutions of the sstem ( ). (b) For each equilibrium point, give the linear approimating
Math 53 Homework 7 Solutions
 Math 5 Homework 7 Solutions Section 5.. To find the mass of the lamina, we integrate ρ(x, y over the box: m a b a a + x + y dy y + x y + y yb y b + bx + b bx + bx + b x ab + a b + ab a b + ab + ab. We
Math 5 Homework 7 Solutions Section 5.. To find the mass of the lamina, we integrate ρ(x, y over the box: m a b a a + x + y dy y + x y + y yb y b + bx + b bx + bx + b x ab + a b + ab a b + ab + ab. We
154 Chapter 9 Hints, Answers, and Solutions The particular trajectories are highlighted in the phase portraits below.
 54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
54 Chapter 9 Hints, Answers, and Solutions 9. The Phase Plane 9.. 4. The particular trajectories are highlighted in the phase portraits below... 3. 4. 9..5. Shown below is one possibility with x(t) and
Math 216 First Midterm 19 October, 2017
 Math 6 First Midterm 9 October, 7 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Math 6 First Midterm 9 October, 7 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Bifurcation Analysis of Non-linear Differential Equations
 Bifurcation Analysis of Non-linear Differential Equations Caitlin McCann 0064570 Supervisor: Dr. Vasiev September 01 - May 013 Contents 1 Introduction 3 Definitions 4 3 Ordinary Differential Equations
Bifurcation Analysis of Non-linear Differential Equations Caitlin McCann 0064570 Supervisor: Dr. Vasiev September 01 - May 013 Contents 1 Introduction 3 Definitions 4 3 Ordinary Differential Equations
Solutions Chapter 9. u. (c) u(t) = 1 e t + c 2 e 3 t! c 1 e t 3c 2 e 3 t. (v) (a) u(t) = c 1 e t cos 3t + c 2 e t sin 3t. (b) du
 u(t) = 1 e t + c 2 e 3 t! c 1 e t 3c 2 e 3 t. (v) (a) u(t) = c 1 e t cos 3t + c 2 e t sin 3t. (b) du") Solutions hapter 9 dode 9 asic Solution Techniques 9 hoose one or more of the following differential equations, and then: (a) Solve the equation directly (b) Write down its phase plane equivalent, and
Solutions hapter 9 dode 9 asic Solution Techniques 9 hoose one or more of the following differential equations, and then: (a) Solve the equation directly (b) Write down its phase plane equivalent, and
Half of Final Exam Name: Practice Problems October 28, 2014
 Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Characterization of the stability boundary of nonlinear autonomous dynamical systems in the presence of a saddle-node equilibrium point of type 0
 Anais do CNMAC v.2 ISSN 1984-82X Characterization of the stability boundary of nonlinear autonomous dynamical systems in the presence of a saddle-node equilibrium point of type Fabíolo M. Amaral Departamento
Anais do CNMAC v.2 ISSN 1984-82X Characterization of the stability boundary of nonlinear autonomous dynamical systems in the presence of a saddle-node equilibrium point of type Fabíolo M. Amaral Departamento
Differential Equations 2280 Sample Midterm Exam 3 with Solutions Exam Date: 24 April 2015 at 12:50pm
 Differential Equations 228 Sample Midterm Exam 3 with Solutions Exam Date: 24 April 25 at 2:5pm Instructions: This in-class exam is 5 minutes. No calculators, notes, tables or books. No answer check is
Differential Equations 228 Sample Midterm Exam 3 with Solutions Exam Date: 24 April 25 at 2:5pm Instructions: This in-class exam is 5 minutes. No calculators, notes, tables or books. No answer check is
Global Stability Analysis on a Predator-Prey Model with Omnivores
 Applied Mathematical Sciences, Vol. 9, 215, no. 36, 1771-1782 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/1.12988/ams.215.512 Global Stability Analysis on a Predator-Prey Model with Omnivores Puji Andayani
Applied Mathematical Sciences, Vol. 9, 215, no. 36, 1771-1782 HIKARI Ltd, www.m-hikari.com http://dx.doi.org/1.12988/ams.215.512 Global Stability Analysis on a Predator-Prey Model with Omnivores Puji Andayani
Part II Problems and Solutions
 Problem 1: [Complex and repeated eigenvalues] (a) The population of long-tailed weasels and meadow voles on Nantucket Island has been studied by biologists They measure the populations relative to a baseline,
Problem 1: [Complex and repeated eigenvalues] (a) The population of long-tailed weasels and meadow voles on Nantucket Island has been studied by biologists They measure the populations relative to a baseline,
Announcements Wednesday, November 7
 Announcements Wednesday, November 7 The third midterm is on Friday, November 6 That is one week from this Friday The exam covers 45, 5, 52 53, 6, 62, 64, 65 (through today s material) WeBWorK 6, 62 are
Announcements Wednesday, November 7 The third midterm is on Friday, November 6 That is one week from this Friday The exam covers 45, 5, 52 53, 6, 62, 64, 65 (through today s material) WeBWorK 6, 62 are
Fundamentals of Dynamical Systems / Discrete-Time Models. Dr. Dylan McNamara people.uncw.edu/ mcnamarad
 Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
ENGI Duffing s Equation Page 4.65
 ENGI 940 4. - Duffing s Equation Page 4.65 4. Duffing s Equation Among the simplest models of damped non-linear forced oscillations of a mechanical or electrical system with a cubic stiffness term is Duffing
ENGI 940 4. - Duffing s Equation Page 4.65 4. Duffing s Equation Among the simplest models of damped non-linear forced oscillations of a mechanical or electrical system with a cubic stiffness term is Duffing
Bishop Kelley High School Summer Math Program Course: Honors Pre-Calculus
 017 018 Summer Math Program Course: Honors Pre-Calculus NAME: DIRECTIONS: Show all work in the packet. Make sure you are aware of the calculator policy for this course. No matter when you have math, this
017 018 Summer Math Program Course: Honors Pre-Calculus NAME: DIRECTIONS: Show all work in the packet. Make sure you are aware of the calculator policy for this course. No matter when you have math, this
CHAPTER 6 HOPF-BIFURCATION IN A TWO DIMENSIONAL NONLINEAR DIFFERENTIAL EQUATION
 CHAPTER 6 HOPF-BIFURCATION IN A TWO DIMENSIONAL NONLINEAR DIFFERENTIAL EQUATION [Discussion on this chapter is based on our paper entitled Hopf-Bifurcation Ina Two Dimensional Nonlinear Differential Equation,
CHAPTER 6 HOPF-BIFURCATION IN A TWO DIMENSIONAL NONLINEAR DIFFERENTIAL EQUATION [Discussion on this chapter is based on our paper entitled Hopf-Bifurcation Ina Two Dimensional Nonlinear Differential Equation,
1. (a) (5 points) Find the unit tangent and unit normal vectors T and N to the curve. r (t) = 3 cos t, 0, 3 sin t, r ( 3π
 (5 points) Find the unit tangent and unit normal vectors T and N to the curve. r (t) = 3 cos t, 0, 3 sin t, r ( 3π") 1. a) 5 points) Find the unit tangent and unit normal vectors T and N to the curve at the point P 3, 3π, r t) 3 cos t, 4t, 3 sin t 3 ). b) 5 points) Find curvature of the curve at the point P. olution:
1. a) 5 points) Find the unit tangent and unit normal vectors T and N to the curve at the point P 3, 3π, r t) 3 cos t, 4t, 3 sin t 3 ). b) 5 points) Find curvature of the curve at the point P. olution:
MATH 251 Final Examination December 19, 2012 FORM A. Name: Student Number: Section:
 MATH 251 Final Examination December 19, 2012 FORM A Name: Student Number: Section: This exam has 17 questions for a total of 150 points. In order to obtain full credit for partial credit problems, all
MATH 251 Final Examination December 19, 2012 FORM A Name: Student Number: Section: This exam has 17 questions for a total of 150 points. In order to obtain full credit for partial credit problems, all
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
Coupled differential equations
 Coupled differential equations Example: dy 1 dy 11 1 1 1 1 1 a y a y b x a y a y b x Consider the case with b1 b d y1 a11 a1 y1 y a1 ay dy y y e y 4/1/18 One way to address this sort of problem, is to
Coupled differential equations Example: dy 1 dy 11 1 1 1 1 1 a y a y b x a y a y b x Consider the case with b1 b d y1 a11 a1 y1 y a1 ay dy y y e y 4/1/18 One way to address this sort of problem, is to
STABILITY. Phase portraits and local stability
 MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
MAS271 Methods for differential equations Dr. R. Jain STABILITY Phase portraits and local stability We are interested in system of ordinary differential equations of the form ẋ = f(x, y), ẏ = g(x, y),
Solutions to Test #1 MATH 2421
 Solutions to Test # MATH Pulhalskii/Kawai (#) Decide whether the following properties are TRUE or FALSE for arbitrary vectors a; b; and c: Circle your answer. [Remember, TRUE means that the statement is
Solutions to Test # MATH Pulhalskii/Kawai (#) Decide whether the following properties are TRUE or FALSE for arbitrary vectors a; b; and c: Circle your answer. [Remember, TRUE means that the statement is
Dynamics and Bifurcations in Predator-Prey Models with Refuge, Dispersal and Threshold Harvesting
 Dynamics and Bifurcations in Predator-Prey Models with Refuge, Dispersal and Threshold Harvesting August 2012 Overview Last Model ẋ = αx(1 x) a(1 m)xy 1+c(1 m)x H(x) ẏ = dy + b(1 m)xy 1+c(1 m)x (1) where
Dynamics and Bifurcations in Predator-Prey Models with Refuge, Dispersal and Threshold Harvesting August 2012 Overview Last Model ẋ = αx(1 x) a(1 m)xy 1+c(1 m)x H(x) ẏ = dy + b(1 m)xy 1+c(1 m)x (1) where
Section 4.5. Integration and Expectation
 4.5. Integration and Expectation 1 Section 4.5. Integration and Expectation Note. In this section we consider integrals of scalar valued functions of a vector and matrix valued functions of a scalar. We
4.5. Integration and Expectation 1 Section 4.5. Integration and Expectation Note. In this section we consider integrals of scalar valued functions of a vector and matrix valued functions of a scalar. We
In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation.
 1 2 Linear Systems In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation 21 Matrix ODEs Let and is a scalar A linear function satisfies Linear superposition ) Linear
1 2 Linear Systems In these chapter 2A notes write vectors in boldface to reduce the ambiguity of the notation 21 Matrix ODEs Let and is a scalar A linear function satisfies Linear superposition ) Linear
Note: Each problem is worth 14 points except numbers 5 and 6 which are 15 points. = 3 2
 Math Prelim II Solutions Spring Note: Each problem is worth points except numbers 5 and 6 which are 5 points. x. Compute x da where is the region in the second quadrant between the + y circles x + y and
Math Prelim II Solutions Spring Note: Each problem is worth points except numbers 5 and 6 which are 5 points. x. Compute x da where is the region in the second quadrant between the + y circles x + y and
Nonlinear Autonomous Systems of Differential
 Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
ENGI Partial Differentiation Page y f x
 ENGI 3424 4 Partial Differentiation Page 4-01 4. Partial Differentiation For functions of one variable, be found unambiguously by differentiation: y f x, the rate of change of the dependent variable can
ENGI 3424 4 Partial Differentiation Page 4-01 4. Partial Differentiation For functions of one variable, be found unambiguously by differentiation: y f x, the rate of change of the dependent variable can
Travelling waves. Chapter 8. 1 Introduction
 Chapter 8 Travelling waves 1 Introduction One of the cornerstones in the study of both linear and nonlinear PDEs is the wave propagation. A wave is a recognizable signal which is transferred from one part
Chapter 8 Travelling waves 1 Introduction One of the cornerstones in the study of both linear and nonlinear PDEs is the wave propagation. A wave is a recognizable signal which is transferred from one part
Chapter 8 Equilibria in Nonlinear Systems
 Chapter 8 Equilibria in Nonlinear Sstems Recall linearization for Nonlinear dnamical sstems in R n : X 0 = F (X) : if X 0 is an equilibrium, i.e., F (X 0 ) = 0; then its linearization is U 0 = AU; A =
Chapter 8 Equilibria in Nonlinear Sstems Recall linearization for Nonlinear dnamical sstems in R n : X 0 = F (X) : if X 0 is an equilibrium, i.e., F (X 0 ) = 0; then its linearization is U 0 = AU; A =
Department of Mathematics IIT Guwahati
 Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
Stability of Linear Systems in R 2 Department of Mathematics IIT Guwahati A system of first order differential equations is called autonomous if the system can be written in the form dx 1 dt = g 1(x 1,
Topic # /31 Feedback Control Systems. Analysis of Nonlinear Systems Lyapunov Stability Analysis
 Topic # 16.30/31 Feedback Control Systems Analysis of Nonlinear Systems Lyapunov Stability Analysis Fall 010 16.30/31 Lyapunov Stability Analysis Very general method to prove (or disprove) stability of
Topic # 16.30/31 Feedback Control Systems Analysis of Nonlinear Systems Lyapunov Stability Analysis Fall 010 16.30/31 Lyapunov Stability Analysis Very general method to prove (or disprove) stability of
ANSWERS Final Exam Math 250b, Section 2 (Professor J. M. Cushing), 15 May 2008 PART 1
, 15 May 2008 PART 1") ANSWERS Final Exam Math 50b, Section (Professor J. M. Cushing), 5 May 008 PART. (0 points) A bacterial population x grows exponentially according to the equation x 0 = rx, where r>0is the per unit rate
ANSWERS Final Exam Math 50b, Section (Professor J. M. Cushing), 5 May 008 PART. (0 points) A bacterial population x grows exponentially according to the equation x 0 = rx, where r>0is the per unit rate
CHAPTER 5 KINEMATICS OF FLUID MOTION
 CHAPTER 5 KINEMATICS OF FLUID MOTION 5. ELEMENTARY FLOW PATTERNS Recall the discussion of flow patterns in Chapter. The equations for particle paths in a three-dimensional, steady fluid flow are dx -----
CHAPTER 5 KINEMATICS OF FLUID MOTION 5. ELEMENTARY FLOW PATTERNS Recall the discussion of flow patterns in Chapter. The equations for particle paths in a three-dimensional, steady fluid flow are dx -----
Sample Solutions of Assignment 10 for MAT3270B
 Sample Solutions of Assignment 1 for MAT327B 1. For the following ODEs, (a) determine all critical points; (b) find the corresponding linear system near each critical point; (c) find the eigenvalues of
Sample Solutions of Assignment 1 for MAT327B 1. For the following ODEs, (a) determine all critical points; (b) find the corresponding linear system near each critical point; (c) find the eigenvalues of
Math 216 Final Exam 24 April, 2017
 Math 216 Final Exam 24 April, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Math 216 Final Exam 24 April, 2017 This sample exam is provided to serve as one component of your studying for this exam in this course. Please note that it is not guaranteed to cover the material that
Course Outline. 2. Vectors in V 3.
 1. Vectors in V 2. Course Outline a. Vectors and scalars. The magnitude and direction of a vector. The zero vector. b. Graphical vector algebra. c. Vectors in component form. Vector algebra with components.
1. Vectors in V 2. Course Outline a. Vectors and scalars. The magnitude and direction of a vector. The zero vector. b. Graphical vector algebra. c. Vectors in component form. Vector algebra with components.
Pullbacks, Isometries & Conformal Maps
 Pullbacks, Isometries & Conformal Maps Outline 1. Pullbacks Let V and W be vector spaces, and let T : V W be an injective linear transformation. Given an inner product, on W, the pullback of, is the inner
Pullbacks, Isometries & Conformal Maps Outline 1. Pullbacks Let V and W be vector spaces, and let T : V W be an injective linear transformation. Given an inner product, on W, the pullback of, is the inner
Outline. Learning Objectives. References. Lecture 2: Second-order Systems
 Outline Lecture 2: Second-order Systems! Techniques based on linear systems analysis! Phase-plane analysis! Example: Neanderthal / Early man competition! Hartman-Grobman theorem -- validity of linearizations!
Outline Lecture 2: Second-order Systems! Techniques based on linear systems analysis! Phase-plane analysis! Example: Neanderthal / Early man competition! Hartman-Grobman theorem -- validity of linearizations!
Section 9.3 Phase Plane Portraits (for Planar Systems)
") Section 9.3 Phase Plane Portraits (for Planar Systems) Key Terms: Equilibrium point of planer system yꞌ = Ay o Equilibrium solution Exponential solutions o Half-line solutions Unstable solution Stable
Section 9.3 Phase Plane Portraits (for Planar Systems) Key Terms: Equilibrium point of planer system yꞌ = Ay o Equilibrium solution Exponential solutions o Half-line solutions Unstable solution Stable
MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation
 MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation 1 Bifurcations in Multiple Dimensions When we were considering one-dimensional systems, we saw that subtle changes in parameter
MATH 415, WEEK 11: Bifurcations in Multiple Dimensions, Hopf Bifurcation 1 Bifurcations in Multiple Dimensions When we were considering one-dimensional systems, we saw that subtle changes in parameter
Math 265 (Butler) Practice Midterm III B (Solutions)
 Practice Midterm III B (Solutions)") Math 265 (Butler) Practice Midterm III B (Solutions). Set up (but do not evaluate) an integral for the surface area of the surface f(x, y) x 2 y y over the region x, y 4. We have that the surface are is
Math 265 (Butler) Practice Midterm III B (Solutions). Set up (but do not evaluate) an integral for the surface area of the surface f(x, y) x 2 y y over the region x, y 4. We have that the surface are is
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes