Explicit examples of minimal hypersurfaces: a four-fold periodic minimal hypersurface in R 4 and beyond
|
|
|
- Shavonne Bradford
- 5 years ago
- Views:
Transcription
1 Explicit examples of minimal hypersurfaces: a four-fold periodic minimal hypersurface in R 4 and beyond Vladimir Tkachev Linköping University
2 1 Introduction 2 A four-fold periodic minimal hypersurface 3 Jordan algebra approach to cubic minimal cones
3 Why explicit examples? Consider a homogeneous cubic form in R 5 u 1(x) = x x5(x2 1 + x2 2 2x2 3 2x2 4 ) (x4(x2 2 x2 1 ) + 2x1x2x3). The set u 1 1 (0) S4 R 5 is an (isoparametric) minimal submanifold.
4 Why explicit examples? Consider a homogeneous cubic form in R 5 u 1(x) = x x5(x2 1 + x2 2 2x2 3 2x2 4 ) (x4(x2 2 x2 1 ) + 2x1x2x3). The set u 1 1 (0) S4 R 5 is an (isoparametric) minimal submanifold. É. Cartan (1938) proved that u 1 and its generalizations in R 8, R 14 and R 26 u d (x) := det x x 1 z 1 z 2 z 1 x x 1 z 3 z 2 z x 1, x R 3d+2, (1) are the only isoparametric polynomials corresponding to hypersurfaces in the Euclidean spheres having exactly 3 distinct constant principal curvatures. Here z k R d = Fd is the real division algebra of dimension d {1, 2, 4, 8}.
5 Why explicit examples? Consider a homogeneous cubic form in R 5 u 1(x) = x x5(x2 1 + x2 2 2x2 3 2x2 4 ) (x4(x2 2 x2 1 ) + 2x1x2x3). The set u 1 1 (0) S4 R 5 is an (isoparametric) minimal submanifold. É. Cartan (1938) proved that u 1 and its generalizations in R 8, R 14 and R 26 u d (x) := det x x 1 z 1 z 2 z 1 x x 1 z 3 z 2 z x 1, x R 3d+2, (1) are the only isoparametric polynomials corresponding to hypersurfaces in the Euclidean spheres having exactly 3 distinct constant principal curvatures. Here z k R d = Fd is the real division algebra of dimension d {1, 2, 4, 8}. Equivalently, u d are the only cubic polynomial solutions of Du(x) 2 = 9 x 4, u(x) = 0, x R n.
6 Why explicit examples? Consider a homogeneous cubic form in R 5 u 1(x) = x x5(x2 1 + x2 2 2x2 3 2x2 4 ) (x4(x2 2 x2 1 ) + 2x1x2x3). The set u 1 1 (0) S4 R 5 is an (isoparametric) minimal submanifold. É. Cartan (1938) proved that u 1 and its generalizations in R 8, R 14 and R 26 u d (x) := det x x 1 z 1 z 2 z 1 x x 1 z 3 z 2 z x 1, x R 3d+2, (1) are the only isoparametric polynomials corresponding to hypersurfaces in the Euclidean spheres having exactly 3 distinct constant principal curvatures. Here z k R d = Fd is the real division algebra of dimension d {1, 2, 4, 8}. Equivalently, u d are the only cubic polynomial solutions of Du(x) 2 = 9 x 4, u(x) = 0, x R n. It can be shown that u d (x) = 2N(x), x J 0, where J 0 is the trace free subspace of the formally real Jordan algebra J = h 3(F d ), d = 1, 2, 4, 8.
7 Why explicit examples? Consider a homogeneous cubic form in R 5 u 1(x) = x x5(x2 1 + x2 2 2x2 3 2x2 4 ) (x4(x2 2 x2 1 ) + 2x1x2x3). The set u 1 1 (0) S4 R 5 is an (isoparametric) minimal submanifold. É. Cartan (1938) proved that u 1 and its generalizations in R 8, R 14 and R 26 u d (x) := det x x 1 z 1 z 2 z 1 x x 1 z 3 z 2 z x 1, x R 3d+2, (1) are the only isoparametric polynomials corresponding to hypersurfaces in the Euclidean spheres having exactly 3 distinct constant principal curvatures. Here z k R d = Fd is the real division algebra of dimension d {1, 2, 4, 8}. Equivalently, u d are the only cubic polynomial solutions of Du(x) 2 = 9 x 4, u(x) = 0, x R n. It can be shown that u d (x) = 2N(x), x J 0, where J 0 is the trace free subspace of the formally real Jordan algebra J = h 3(F d ), d = 1, 2, 4, 8. N. Nadirashvili, S. Vlăduţ, V.T. (2011): u 1(x) x 1 is a viscosity solution to a uniformly elliptic Hessian equation F (D 2 u) = 0 in the unit ball in R 5.
8 Some general remarks Searching of explicit examples: they are also minimal in the sense that they are very distinguished in many respects.
9 Some general remarks Searching of explicit examples: they are also minimal in the sense that they are very distinguished in many respects. Classical (2D) minimal surface theory relies heavily on the Weierstrass-Enneper representation and complex analysis tools (uniqueness theorem, reflection principle etc) The codimension two case is also very distinguished: any complex hypersurface in C n = R 2n is always minimal. The only known explicit examples of complete minimal hypersurfaces in R n, n 3, are the catenoids, and minimal hypercones (in particular, the isoparametric ones). There are also known to exist some minimal graphs in R n, n 9 (E. Bombieri, de Giorgi, E. Giusti, L. Simon), the (immersed) analogues of Enneper s surface by J. Choe in R n for 4 n 7; the embedded analogues of Riemann one-periodic examples due to S. Kaabachi, F. Pacard in R n, n 3. None of the latter examples are known explicitly. W.Y. Hsiang (1967): find an appropriate classification of minimal hypercones in R n, at least of cubic minimal cones. V.T. (2012): It turns out that the most natural framework for studying cubic minimal cones is Jordan algebras (non-associative structures frequently appeared in connection with elliptic type PDE s); will be discussed later.
10 Minimal surfaces with harmonic level sets
11 Minimal surfaces with harmonic level sets Let h(z) : C m C be holomorphic and F : R k R be C 2 -smooth real valued. Define a hypersurface by the implicit equation M = {x R 2m+k = C m R k : F (t) = Re h(z)} Then M is minimal at its regular points if and only if Re where m α,β=1 h αβ h α h β + h(z) 2 F (t) 1 (F ) 0 mod (F (t) Re h(z)) is the mean curvature operator. 1 F = F 2 F k i,j=1 F ij F i F j Remark. Some important particular cases: F 0, h 0. For instance, the Lawson minimal cones in R 2n produced by h(z 1,..., z n) = z m zn mn, F 0. In fact, there are many other examples.
12 Minimal surfaces with harmonic level sets Consider the case k = m = 1. Then M = {x R 3 : F (x 1 ) = Re h(x 1 + x 2 1)}, can be thought of as a hypersurface R 3 with harmonic level sets. V.V. Sergienko, V.T. (1998) The surface M above is minimal if and only if h (z) = 1/g(z) (z = x 1 + x 2 1) with g(z) satisfying g (z)g(z) g 2 (z) = c R. Then the function F is found by F (t) + Y (F (t)) = 0, where Y (t) is well-defined by virtue of Re g g 2 = Y (Re h(z)). Remark. Notice that the resulting surface M, if non-empty, is automatically embedded because u(x) 2 = F 2 (x 1 ) + 1 g(z) 2 > 0, where u(x) = F (x 1 ) Re h(x 1 + x 2 1).
g(z) g 2 (z) = c R are (a) g(z) = az + b, (b)")

 = sin z h(z) = ln z h(z) = i ln z h(z) = e z h(w) = ln")
 = sin x 2")
13 Minimal surfaces with harmonic level sets The only possible solutions of g (z)g(z) g 2 (z) = c R are (a) g(z) = az + b, (b) g(z) = ae bz, and (c) g(z) = a sin(bz + c), a 2, b 2 R and c C which, in particular, yields: the catenoid the helicoid a Scherk type surface a doubly periodic surface g(z) = z g(z) = iz g(z) = e z g(z) = sin z h(z) = ln z h(z) = i ln z h(z) = e z h(w) = ln tanh z 2 The defining equations x x2 2 = cosh2 x 3 x 2 x 1 = tan x 3 exp x 3 = cos x 2 cos x 1 cn( kx 3 k, k) = sin x 2 sinh x 1
14 Triply-periodic minimal surfaces in R 3 Observe that all the above solutions have the following multiplicative form: φ 1(x 1)φ 2(x 2)φ 3(x 3) = 1. (2)
15 Triply-periodic minimal surfaces in R 3 Observe that all the above solutions have the following multiplicative form: φ 1(x 1)φ 2(x 2)φ 3(x 3) = 1. (2) V. Sergienko and V.T. (1998) Let (2) define a minimal surface in R 3. Suppose also that two of the functions φ i assume a zero value and satisfy φ 2 k = P k(φ 2 k ) for all k = 1, 2, 3. Then where the matrix is generating, i.e. a iα a iβ = a jγ a kγ. φ 12 = a 11 + a 12φ a13φ4 1 φ 22 = a 21 + a 22φ a23φ4 2 φ 2 3 = a 31 + a 32φ a33φ4 3 A := a (a22 + a23) a13 1 a 21 2 (a21 + a23) a23 1 a 31 2 (a21 + a22) a33 Remark. The corresponding results hold also true for maximal surfaces in the 3D Minkowski space-time (Sergienko V.V., V.T.; see some related results due to J. Hoppe).
m 2 (1+m 2 )(1 k 2 m 2 ) 1 (1+m 1+m 2 2 )k 2 (1+k 2 )(1 k 2 m 2 ) k 2 m 2 1 k 2 m 2 1 k 2 m 2 (1+k 2")
 = cn(x 1; 2 1 1 + k 2 ) cn(x 2; 1 1 + m 2 ) A triply periodic minimal surface with k = m = 1 2 A porous gasket (k")
16 Triply-periodic minimal surfaces in R 3 Example. A = 1 (1+k 1+k 2 2 )m 2 (1+m 2 )(1 k 2 m 2 ) 1 (1+m 1+m 2 2 )k 2 (1+k 2 )(1 k 2 m 2 ) k 2 m 2 1 k 2 m 2 1 k 2 m 2 (1+k 2 )(1+m 2 ) k2 1+k 2 m2 1+m k 2 m 2, k2 m 2 1, the corresponding triply periodic minimal surface x 3 km sn( 1 k 2 m ; km) = cn(x 1; k 2 ) cn(x 2; m 2 ) A triply periodic minimal surface with k = m = 1 2 A porous gasket (k = 8 and m = 1 9 ) ariational problems and Geometric PDE s June 21, 2013
17 Some further motivations and observations
18 Some further motivations and observations Some known examples of minimal hypersurfaces in R 4 in the additive form φ 1(x 1) + φ 2(x 2) + φ 3(x 3) + φ 4(x 4) = 0 a hyperplane, a 1y 1 + a 2y 2 + a 3y 3 + a 4y 4 = 0 the Clifford cone, eq. I: ln x 1 + ln x 2 ln x 3 ln x 4 = 0 (actually, x 1x 2 = x 3x 4) the Clifford cone, eq. II: x x2 2 x2 3 x2 4 = 0; the 3D-catenoid: x x2 2 + x2 3 1 sn 2 (x 4, 1) = 0 Remarks. (i) The 3D-catenoid can be thought as a one-periodic minimal hypersurface in R 4 (cf. the Riemann minimal surface in R 4 ). (ii) The same elliptic function sn(x, 1) also appears in the four-fold periodic example considered below.
19 Some further motivations and observations A basic regularity property of n-dimensional area minimizing (or stable minimal) hypersurfaces is that the Hausdorff dimension of the singular set is less than or equal to n 7 (F. Almgren, E. Giusti, J. Simons, L. Simon, R. Schoen). Important questions: What kinds of singular sets actually occur? In particular, it would be interesting to characterize embedded minimal submanifolds of R n which have isolated singularities. Remark. On the other hand, isolated singularities for solutions of the maximal surface equation in R n, n 2, is a very common phenomenon (E. Calabi, L. Simon, R. Bartnik, K. Ecker, V. Miklyukov, A.A. Klyachin, V.A. Klyachin, I. Fernández, F.J. López, R. Souam). Here, the most natural problem is to characterize the singular data (the singular set with a prescribed asymptotic behaviour) which guarantee the existence of the corresponding maximal surfaces.
20 Some other motivations and observations Minimal hypersurfaces in R n with singularities: L. Caffarelli, R. Hardt, L. Simon (1984) showed that there exist (bordered) embedded minimal hypersurfaces in R n, n 4, with an isolated singularity but which is not a cone. N. Smale (1989) proved the existence of examples of stable embedded minimal hypersurfaces with boundary, in R n, n 8, with an arbitrary number of isolated singularities.
21 A four-fold periodic minimal hypersurface
22 Three remarkable lattices in R 4 = H We identify a vector x R 4 with the quaternion x 11 + ix 2 + jx 3 + kx 4 H. the checkerboard lattice: D 4 = {m Z 4 : 4 i=1 mi 0 mod 2} the Lipschitz integers: Z 4 = {m H : m i Z} = D 4 (1 + D 4) the F 4 lattice of the Hurwitz integers H = Z 4 (h + Z 4 ), where h = 1 (1 + i + j + k), 2 is an abelian ring (the densest possible lattice packing of balls in R 4 ). 1 ±1, ±i, ±j, ±k 2 (±1 ± i ± j ± k)... taken together the 16-cell the 8-cell (the hypercube) the 24-cell (after John C. Baez, Bull. Amer. Math. Soc., 2002) ariational problems and Geometric PDE s June 21, 2013
23 Lemniscatic functions Define the lemniscatic sine by sl 2 t = 1 sl 4 t, sl 0 = 0, (3) or by Jacobi s elliptic sine function: sl t = sn(x, 1), and denote by s(t) := sl(ϖt), and the associate lemniscatic cosine function c(t) = s(t ), where 1 dt ϖ = 2ω = = Γ( 1 4 )2 1 1 t 4 2 2π. Some important properties: the double periodicity: s(z + 2n 1 + 2i n 2 ) = s(z), n 1, n 2 Z; the multiplicative identity: s( 1z) = 1s(z). The Euler-Fangano identity: (1 + s 2 (t))(1 + c 2 (t)) = 2.
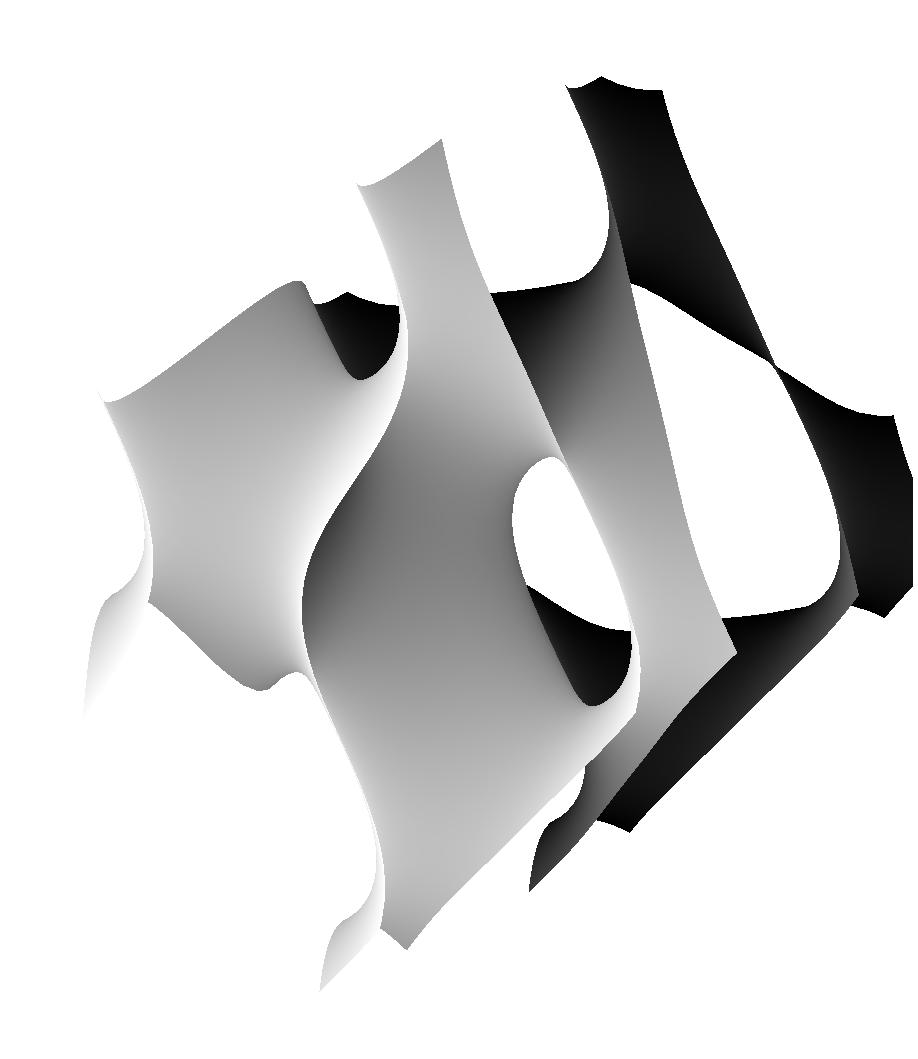
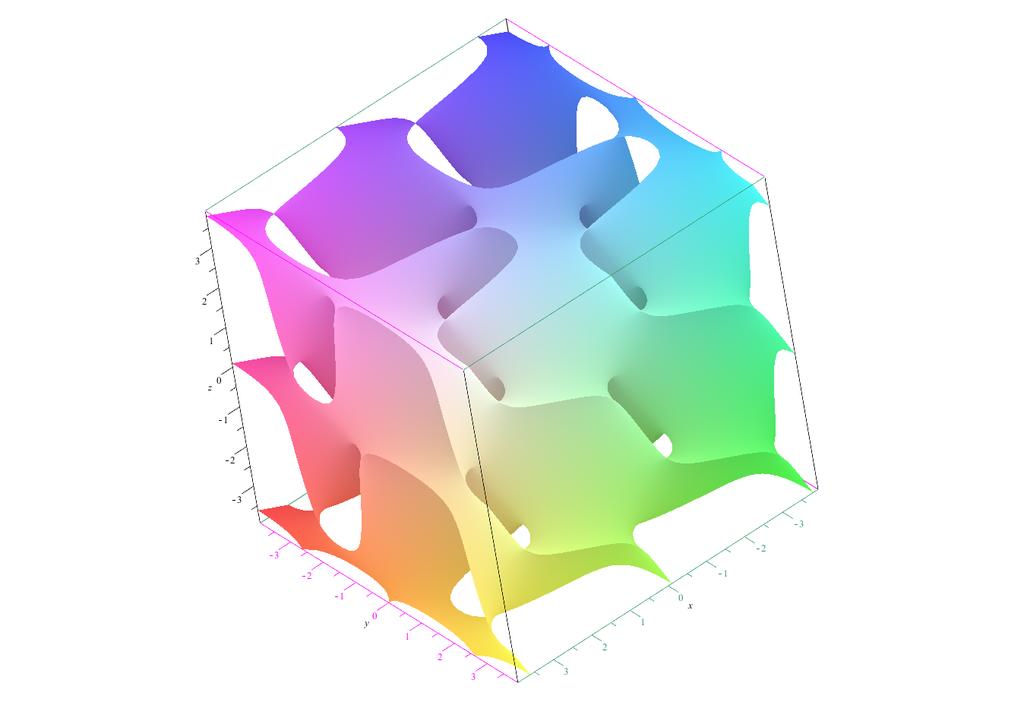
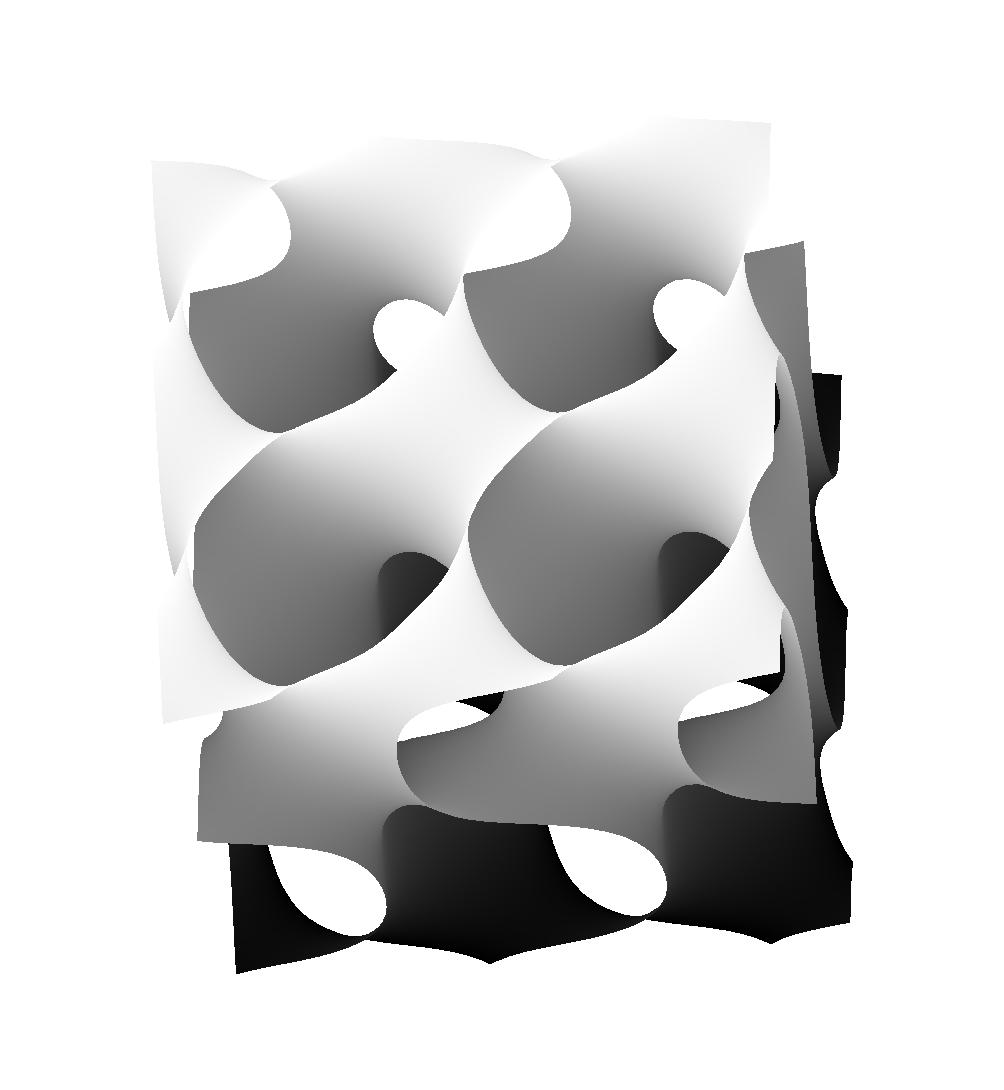
24 The construction Define S(x) = s(x 1)s(x 2) s(x 3)s(x 4) : R 4 R and M := S 1 (0) and define the skeleton of M by M 0 := {x R 4 : s(x 1)s(x 2) = s(x 3)s(x 4) = 0}. Proposition 1 (i) M \ Sing(M) is a smooth embedded minimal hypersurface in R 4, where Sing(M) = Z 4 (h + D 4), (ii) x M \ M 0 x (0, 1) 4 mod D 4.
25 The construction Define S(x) = s(x 1)s(x 2) s(x 3)s(x 4) : R 4 R and M := S 1 (0) and define the skeleton of M by M 0 := {x R 4 : s(x 1)s(x 2) = s(x 3)s(x 4) = 0}. Proposition 1 (i) M \ Sing(M) is a smooth embedded minimal hypersurface in R 4, where Sing(M) = Z 4 (h + D 4), (ii) x M \ M 0 x (0, 1) 4 mod D 4. Proof. It is straightforward to verify that 1S(x) = S(x) a polynomial of s i where 1 is the mean curvature operator. Furthermore, 1 ϖ 2 S 2 (s s2 2 + s2 3 + s2 4 )(1 s2 1 s2 2 ) mod S. Thus, S vanishes at x M if either of the following holds: s(x 1) = s(x 2) = s(x 3) = s(x 4) = 0 x Z 4 (singularities of Z 4 -type) s(x 1) 2 s(x 2) 2 = 1 x h + D 4 (singularities of D 4-type)
 = ±(x 2 3 + x2 4 x2 1 x2 2 ) + O( x 4 ), as x 0, Question: If there exists a symmetry of R")
26 The singular set of M Singularities of Z 4 -type: if a Z 4 then S(a + x) = ±x 1x 2 ± x 3x 4 + O( x 4 ), as x 0. Singularities of D 4-type: if a = h + D 4 then S(a + x) = ±(x x2 4 x2 1 x2 2 ) + O( x 4 ), as x 0, Question: If there exists a symmetry of R 4 which interchanges the two types?

27 Some cross-section chips of M
28 A stratification of M ariational problems and Geometric PDE s June 21, 2013
 s 2 1 + s2 2 + s2 3 +, s i = s(x i), K R. s2 4 The level sets σ 1 (λ), 1 λ 1, foliate M as follows: Figure.")
29 A stratification of M The function σ(x) = 2 π arcsin(s(x1)s(x2)) : M R is well-defined smooth function on M \ Z 4 with K M σ 2 = (s2 1 + s2 2 ) (s2 3 + s2 4 ) s s2 2 + s2 3 +, s i = s(x i), K R. s2 4 The level sets σ 1 (λ), 1 λ 1, foliate M as follows: Figure. A singular foliation of M by the level sets of σ
30 The connectedness of M Proposition 2 M is path-connected.
31 The connectedness of M Proposition 2 M is path-connected. Proof. We will show that any point x M can be connected wit the origin in R 4. Notice that σ(a) = σ(b) =: λ, where σ(y) = s(y 1)s(y 2) : R 2 R and A = (x 1, x 2), A = (x 3, x 4), and observe that x = (y, y ) M if and only if σ(y) = σ(y ). Figure: The λ-level set of σ in the (x 1, x 2)- and (x 3, x 4)-planes respectively.
32 The connectedness of M Proposition 2 M is path-connected. Proof. We will show that any point x M can be connected wit the origin in R 4. Notice that σ(a) = σ(b) =: λ, where σ(y) = s(y 1)s(y 2) : R 2 R and A = (x 1, x 2), A = (x 3, x 4), and observe that x = (y, y ) M if and only if σ(y) = σ(y ). Figure: The λ-level set of σ in the (x 1, x 2)- and (x 3, x 4)-planes respectively.
33 The connectedness of M Proposition 2 M is path-connected. Proof. We will show that any point x M can be connected wit the origin in R 4. Notice that σ(a) = σ(b) =: λ, where σ(y) = s(y 1)s(y 2) : R 2 R and A = (x 1, x 2), A = (x 3, x 4), and observe that x = (y, y ) M if and only if σ(y) = σ(y ). Figure: The λ-level set of σ in the (x 1, x 2)- and (x 3, x 4)-planes respectively.
34 The connectedness of M Proposition 2 M is path-connected. Proof. We will show that any point x M can be connected wit the origin in R 4. Notice that σ(a) = σ(b) =: λ, where σ(y) = s(y 1)s(y 2) : R 2 R and A = (x 1, x 2), A = (x 3, x 4), and observe that x = (y, y ) M if and only if σ(y) = σ(y ). Figure: The λ-level set of σ in the (x 1, x 2)- and (x 3, x 4)-planes respectively.
35 Symmetries of M Proposition 3 Let T (M) be the group the translations of R 4 leaving M invariant. Then T (M) = D 4. Proof. The inclusion D 4 T (M) is by the anti-periodicity s(x + 1) = s(x). In the converse direction, suppose x m + x is in T (M). Then S(x 1, 0, x 3, 0) = 0 implies (x 1, 0, x 3, 0) M, and, thus, also (x 1 + m 1, m 2, x 3 + m 3, m 4 ) M, i.e. s(x 1 + m 1 )s(m 2 ) = s(x 3 + m 2 )s(m 4 ) for any x 1, x 3 R. This implies m 1, m 3 Z. Similarly, m 2, m 4 Z. Thus m Z 4. On the other hand, h M and s(m i ) = ( 1)m i imply Thus, m D 4, as required. ( 1) m 1+m 2 = ( 1) m 3+m 4.
36 Symmetries of M
37 Symmetries of M Proposition 4 The group of the orthogonal transformations of R 4 leaving M invariant is isomorphic to D 4 Z 4 2, where D 4 is the dihedral group (the symmetry group of the square). Proof. Let O(M) be the group of orthogonal automorphisms of M and define Σ 0 = {±1, ±i, ±j, ±k} Σ 1 = {(± 1 2, ± 1 2, ± 1 2, ± 1 2 ) : an even number minus signs} Σ 2 = {(± 1 2, ± 1 2, ± 1 2, ± 1 2 ) : an odd number minus signs} Each set consists of 8 unit vectors (the so-called Hurwitz units). Suppose U O(M). Then one can show that: O(M) stabilizes Σ := Sing(M) S 3 = Σ0 Σ 1 ;
38 Symmetries of M Proposition 4 The group of the orthogonal transformations of R 4 leaving M invariant is isomorphic to D 4 Z 4 2, where D 4 is the dihedral group (the symmetry group of the square). Proof. Let O(M) be the group of orthogonal automorphisms of M and define Σ 0 = {±1, ±i, ±j, ±k} Σ 1 = {(± 1 2, ± 1 2, ± 1 2, ± 1 2 ) : an even number minus signs} Σ 2 = {(± 1 2, ± 1 2, ± 1 2, ± 1 2 ) : an odd number minus signs} Each set consists of 8 unit vectors (the so-called Hurwitz units). Suppose U O(M). Then one can show that: O(M) stabilizes Σ := Sing(M) S 3 = Σ0 Σ 1 ; thus U : Σ Σ acts as a permutation;
39 Symmetries of M Proposition 4 The group of the orthogonal transformations of R 4 leaving M invariant is isomorphic to D 4 Z 4 2, where D 4 is the dihedral group (the symmetry group of the square). Proof. Let O(M) be the group of orthogonal automorphisms of M and define Σ 0 = {±1, ±i, ±j, ±k} Σ 1 = {(± 1 2, ± 1 2, ± 1 2, ± 1 2 ) : an even number minus signs} Σ 2 = {(± 1 2, ± 1 2, ± 1 2, ± 1 2 ) : an odd number minus signs} Each set consists of 8 unit vectors (the so-called Hurwitz units). Suppose U O(M). Then one can show that: O(M) stabilizes Σ := Sing(M) S 3 = Σ0 Σ 1 ; thus U : Σ Σ acts as a permutation; one has for the scalar product: Σi, Σ j = 0 or ±1 if i = j, and ± 2 1 if i j.
40 Symmetries of M Proposition 4 The group of the orthogonal transformations of R 4 leaving M invariant is isomorphic to D 4 Z 4 2, where D 4 is the dihedral group (the symmetry group of the square). Proof. Let O(M) be the group of orthogonal automorphisms of M and define Σ 0 = {±1, ±i, ±j, ±k} Σ 1 = {(± 1 2, ± 1 2, ± 1 2, ± 1 2 ) : an even number minus signs} Σ 2 = {(± 1 2, ± 1 2, ± 1 2, ± 1 2 ) : an odd number minus signs} Each set consists of 8 unit vectors (the so-called Hurwitz units). Suppose U O(M). Then one can show that: O(M) stabilizes Σ := Sing(M) S 3 = Σ0 Σ 1 ; thus U : Σ Σ acts as a permutation; one has for the scalar product: Σi, Σ j = 0 or ±1 if i = j, and ± 2 1 if i j. hence, it readily follows from Ux, Uy = x, y that U maps Σ0 onto either itself or Σ 1 ;
41 Symmetries of M Proposition 4 The group of the orthogonal transformations of R 4 leaving M invariant is isomorphic to D 4 Z 4 2, where D 4 is the dihedral group (the symmetry group of the square). Proof. Let O(M) be the group of orthogonal automorphisms of M and define Σ 0 = {±1, ±i, ±j, ±k} Σ 1 = {(± 1 2, ± 1 2, ± 1 2, ± 1 2 ) : an even number minus signs} Σ 2 = {(± 1 2, ± 1 2, ± 1 2, ± 1 2 ) : an odd number minus signs} Each set consists of 8 unit vectors (the so-called Hurwitz units). Suppose U O(M). Then one can show that: O(M) stabilizes Σ := Sing(M) S 3 = Σ0 Σ 1 ; thus U : Σ Σ acts as a permutation; one has for the scalar product: Σi, Σ j = 0 or ±1 if i = j, and ± 2 1 if i j. hence, it readily follows from Ux, Uy = x, y that U maps Σ0 onto either itself or Σ 1 ; since U stabilizes Σ one can show that it also stabilizes Σ0 Σ 1 Σ 2 ;
42 Symmetries of M Proposition 4 The group of the orthogonal transformations of R 4 leaving M invariant is isomorphic to D 4 Z 4 2, where D 4 is the dihedral group (the symmetry group of the square). Proof. Let O(M) be the group of orthogonal automorphisms of M and define Σ 0 = {±1, ±i, ±j, ±k} Σ 1 = {(± 1 2, ± 1 2, ± 1 2, ± 1 2 ) : an even number minus signs} Σ 2 = {(± 1 2, ± 1 2, ± 1 2, ± 1 2 ) : an odd number minus signs} Each set consists of 8 unit vectors (the so-called Hurwitz units). Suppose U O(M). Then one can show that: O(M) stabilizes Σ := Sing(M) S 3 = Σ0 Σ 1 ; thus U : Σ Σ acts as a permutation; one has for the scalar product: Σi, Σ j = 0 or ±1 if i = j, and ± 2 1 if i j. hence, it readily follows from Ux, Uy = x, y that U maps Σ0 onto either itself or Σ 1 ; since U stabilizes Σ one can show that it also stabilizes Σ0 Σ 1 Σ 2 ; It follows that U acts also as a permutation on the set {Σi : i = 1..3} stabilizing Σ 2.
43 Symmetries of M Next, since U : M M, one easily finds that the quadratic form q(x) = x 1x 2 x 3x 4 (corresponding to the Clifford cone singularity at the origin) is invariant up to a sign under the action of O(M).
44 Symmetries of M Next, since U : M M, one easily finds that the quadratic form q(x) = x 1x 2 x 3x 4 (corresponding to the Clifford cone singularity at the origin) is invariant up to a sign under the action of O(M). On the other hand, using the fact that U : Σ 2 Σ 2 and choosing an orthonormal basis in Σ 2, denoted by v i, i = 1, 2, 3, 4, as the column-vectors of the matrix B := 1 2 we find for any x = 4 i=1 yivi , and we also have q(x) = y y2 4 y2 1 y2 2 Uv i = ɛ iv α(i), 1 i 4, ɛ 2 i = 1, where α is a permutation which is actually is an element of the symmetry group of the square (the dihedral group) D 4. It follows that O(M) is a subgroup of the group of orthogonal transformations leaving Σ 2 invariant, i.e. D 4 Z 4 2.
45 Proposition 5 Let and Then Φ(x) := s(x 1 )s(x 2 ) s(x 3 )s(x 4 ) (1 + s 2 ( x 1+x 2 2 )s 2 ( x 3+x 4 2 )) (1 + s 2 ( x 1 x 2 2 )s 2 ( x 3 x 4 2 )) A = Φ 1 (0) = M Φ(Ax) = Φ(x), A is a reflection in R 4 leaving invariant the holes D 4 + h 2 and A : Σ 2 Σ 2. More precisely, A is an orthogonal involution Σ 0 onto Σ 1 ; It follows, in particular, that M is invariant under the A-action.
46 Some remarks and open questions
47 Some remarks and open questions The only regular polytopes in R n other than the n-simplex, n-cube, and n-orthoplex are the dodecahedron and icosahedron in R 3 and three special polytopes in R 4 : the 24-cell, 120-cell, and 600-cell. The 24-cell is self-dual while the 120-cell and the 600-cell are dual to each other. In each R n there is a generalisation of the cube tiling. The only regular tilings other than cube tilings are two regular tilings of R 2 the dual tilings by triangles and hexagons and two dual tilings of R 4, by 24-cells and 4-orthoplexes.
48 Some remarks and open questions It would be desirable to find a quaternionic representation of the function Φ(x).
49 Some remarks and open questions It would be desirable to find a quaternionic representation of the function Φ(x). One can show that there is no regularly embedded minimal hypersurfaces in R 4 with exactly the same symmetry group as M. Does there exist a D 4-periodic embedded non-singular minimal hypersurface in R 4?
50 Some remarks and open questions It would be desirable to find a quaternionic representation of the function Φ(x). One can show that there is no regularly embedded minimal hypersurfaces in R 4 with exactly the same symmetry group as M. Does there exist a D 4-periodic embedded non-singular minimal hypersurface in R 4? What about E 8 in R 8 (some connection to the Clifford-Simons cones and entire minimal graphs) or the Leech lattice in R 24?
51 Some remarks and open questions It would be desirable to find a quaternionic representation of the function Φ(x). One can show that there is no regularly embedded minimal hypersurfaces in R 4 with exactly the same symmetry group as M. Does there exist a D 4-periodic embedded non-singular minimal hypersurface in R 4? What about E 8 in R 8 (some connection to the Clifford-Simons cones and entire minimal graphs) or the Leech lattice in R 24? Is it possible to glue minimal cones along periodic lattices in R n as skeletons to obtain complete embedded (periodic) minimal hypersurfaces?
52 Some remarks and open questions It would be desirable to find a quaternionic representation of the function Φ(x). One can show that there is no regularly embedded minimal hypersurfaces in R 4 with exactly the same symmetry group as M. Does there exist a D 4-periodic embedded non-singular minimal hypersurface in R 4? What about E 8 in R 8 (some connection to the Clifford-Simons cones and entire minimal graphs) or the Leech lattice in R 24? Is it possible to glue minimal cones along periodic lattices in R n as skeletons to obtain complete embedded (periodic) minimal hypersurfaces? What kind of isolated singularities can occur for higher-dimensional periodic minimal hypersurfaces? Are they necessarily algebraic?
53 Radial eigencubics Recall that 1u = u 2 u n i,j=1 u ij u i u j, u : Rn R. Definition A polynomial solution of 1u 0 mod u is called an eigenfunction. An eigenfunction of deg u = 3 is called an eigencubic. A solution of 1u(x) = λ x 2 u is called a radial eigencubic.
 = λ x 2 u is called a radial eigencubic. V.T.")
54 Radial eigencubics Recall that 1u = u 2 u n i,j=1 u ij u i u j, u : Rn R. Definition A polynomial solution of 1u 0 mod u is called an eigenfunction. An eigenfunction of deg u = 3 is called an eigencubic. A solution of 1u(x) = λ x 2 u is called a radial eigencubic. V.T. (2010) Any radial eigencubic if harmonic; The cubic trace identity holds: tr(d 2 u) 3 = 3(n 1 1)λu(x), where n 1 Z 0 ; Any radial eigencubic belongs to either of the following families: a Clifford type eigencubic (an infinite family associated with Clifford symmetric systems); exceptional eigencubics (for example, the Cartan isoparametric cubics in R n, n = 5, 8, 14, 26); only finitely many members exist:
55 A short introduction into Jordan algebras
56 A short introduction into Jordan algebras P. Jordan (1932): a program to discover a new algebraic setting for quantum mechanics by capture intrinsic algebraic properties of Hermitian matrices. A Jordan (J.) algebra J is vector space with a bilinear commutative product : J J J satisfying the the Jordan identity x 2 (x y) = x (x 2 y) The algebra J is formally real if additionally x 2 + y 2 = 0 implies x = y = 0. For any x J, the subalgebra J(x) generated by x is associative. The rank of J is max{dim J(x) : x J} and the minimum polynomial of x is m x(λ) = λ r σ 1(x)λ r ( 1) r σ r(x) such that m x(x) = 0. σ 1(x) = Tr x = the generic trace of x, σ n(x) = N(x) = the generic norm (or generic determinant) of x. Example 1. An associative algebra becomes a J. algebra with x y = 1 2 (xy + yx). Example 2. The Jordan algebra of n n matrices over R: rank x = n, Tr x = tr x, N(x) = det x.
57 Formally real Jordan algebras Classification of formally real Jordan algebras P. Jordan, J. von Neumann, E. Wigner, On an algebraic generalization of the quantum mechanical formalism, Annals of Math., 1934 Any (finite-dimensional) formally real J. algebra is a direct sum of the simple ones: the algebra h n(f 1) of symmetric matrices over the reals; the algebra h n(f 2) of Hermitian matrices over the complexes; the algebra h n(f 4) of Hermitian matrices over the quaternions; the spin factors J(R n+1 ) with (x 0, x) (y 0, y) = (x 0y 0 + x, y ; x 0y + y 0x); h 3(F 8), the Albert exceptional algebra. In particular, the only possible formally real J. algebras J with rank(j) = 3 are: a Jordan algebra the norm of a trace free element J = h 3(F d ), d = 1, 2, 4, 8 2N(x) = ud (x) J = R J(R n+1 ) 2N(x) = 4x 3 n 3xn x 2 J = F 3 1 = R R R 2N(x) = x 3 2 3x2x2 1 Remark. V.T. (2012): the second column is exactly the only cubic solutions to Du(x) 2 = 9 x 4. and provided an explicit correspondence between cubic solutions of the latter equation and formally real cubic Jordan algebras.
58 Hessian algebras Definition A Hessian (non-associative in general) algebra is a vector space V over F with a non-degenerate scalar product,, a cubic form N : V F (F is R or C), and a multiplication on V defined by x#y, z = N(x; y; z) = x y zn. Notice that the multiplication is necessarily is associative: xy, z = x, yz.
59 Hessian algebras Definition A Hessian (non-associative in general) algebra is a vector space V over F with a non-degenerate scalar product,, a cubic form N : V F (F is R or C), and a multiplication on V defined by x#y, z = N(x; y; z) = x y zn. Notice that the multiplication is necessarily is associative: xy, z = x, yz. Theorem (V.T., 2012) A cubic form u is a radial eigencubic on V = R n if and only if the Hessian algebra on V associated with u possesses the following relation: x 2 x 2 + 4x x 3 4 x 2 x 2 16N(x)x = 0, u(x) := 1 6 x2, x, for any element x V.
60 Cubic cones via Jordan algebras Theorem (V.T., 2012]) Let V be the Hessian algebra associated with a minimal radial cubic u. Then it contains a naturally embedded non-trivial Jordan algebra J. The radial eigencubic u is Clifford if and only if the associated Jordan algebra J is reduced.
61 Cubic cones via Jordan algebras Theorem (V.T., 2012]) Let V be the Hessian algebra associated with a minimal radial cubic u. Then it contains a naturally embedded non-trivial Jordan algebra J. The radial eigencubic u is Clifford if and only if the associated Jordan algebra J is reduced. Theorem (V.T., 2012]) Let V be a cubic Jordan algebra and W be a subspace of V. Assume that there exists a basis {e i} 1 i n of W such that (a) n i=1 e# i W ; (b) the linear mapping α(v). = n i=1 T (v; ei)ei : V W commute with the adjoint map: α(v # ) = (α(v)) # mod W. Then the generic norm N(x) = N( i xiei) is a radial eigencubic in Rn satisfying 1N(x) = 2T (α(x); x) N(x). (4)
62 Thank you!
EXERCISES IN MODULAR FORMS I (MATH 726) (2) Prove that a lattice L is integral if and only if its Gram matrix has integer coefficients.
 (2) Prove that a lattice L is integral if and only if its Gram matrix has integer coefficients.") EXERCISES IN MODULAR FORMS I (MATH 726) EYAL GOREN, MCGILL UNIVERSITY, FALL 2007 (1) We define a (full) lattice L in R n to be a discrete subgroup of R n that contains a basis for R n. Prove that L is
EXERCISES IN MODULAR FORMS I (MATH 726) EYAL GOREN, MCGILL UNIVERSITY, FALL 2007 (1) We define a (full) lattice L in R n to be a discrete subgroup of R n that contains a basis for R n. Prove that L is
Jordan algebras, non-linear PDE s and integrability
 Jordan algebras, non-linear PDE s and integrability With warm wishes to Dmitri Prokhorov on his 65 birthday Vladimir Tkachev Åsö Vuxenutbildning / KTH, Stockholm, Sweden Why Jordan algebras? One of reasons
Jordan algebras, non-linear PDE s and integrability With warm wishes to Dmitri Prokhorov on his 65 birthday Vladimir Tkachev Åsö Vuxenutbildning / KTH, Stockholm, Sweden Why Jordan algebras? One of reasons
Manoj K. Keshari 1 and Satya Mandal 2.
 K 0 of hypersurfaces defined by x 2 1 +... + x 2 n = ±1 Manoj K. Keshari 1 and Satya Mandal 2 1 Department of Mathematics, IIT Mumbai, Mumbai - 400076, India 2 Department of Mathematics, University of
K 0 of hypersurfaces defined by x 2 1 +... + x 2 n = ±1 Manoj K. Keshari 1 and Satya Mandal 2 1 Department of Mathematics, IIT Mumbai, Mumbai - 400076, India 2 Department of Mathematics, University of
An eightfold path to E 8
 An eightfold path to E 8 Robert A. Wilson First draft 17th November 2008; this version 29th April 2012 Introduction Finite-dimensional real reflection groups were classified by Coxeter [2]. In two dimensions,
An eightfold path to E 8 Robert A. Wilson First draft 17th November 2008; this version 29th April 2012 Introduction Finite-dimensional real reflection groups were classified by Coxeter [2]. In two dimensions,
6 Orthogonal groups. O 2m 1 q. q 2i 1 q 2i. 1 i 1. 1 q 2i 2. O 2m q. q m m 1. 1 q 2i 1 i 1. 1 q 2i. i 1. 2 q 1 q i 1 q i 1. m 1.
 6 Orthogonal groups We now turn to the orthogonal groups. These are more difficult, for two related reasons. First, it is not always true that the group of isometries with determinant 1 is equal to its
6 Orthogonal groups We now turn to the orthogonal groups. These are more difficult, for two related reasons. First, it is not always true that the group of isometries with determinant 1 is equal to its
Problems in Linear Algebra and Representation Theory
 Problems in Linear Algebra and Representation Theory (Most of these were provided by Victor Ginzburg) The problems appearing below have varying level of difficulty. They are not listed in any specific
Problems in Linear Algebra and Representation Theory (Most of these were provided by Victor Ginzburg) The problems appearing below have varying level of difficulty. They are not listed in any specific
CALCULUS ON MANIFOLDS. 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M =
 CALCULUS ON MANIFOLDS 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M = a M T am, called the tangent bundle, is itself a smooth manifold, dim T M = 2n. Example 1.
CALCULUS ON MANIFOLDS 1. Riemannian manifolds Recall that for any smooth manifold M, dim M = n, the union T M = a M T am, called the tangent bundle, is itself a smooth manifold, dim T M = 2n. Example 1.
arxiv: v1 [math.gr] 8 Nov 2008
![arxiv: v1 [math.gr] 8 Nov 2008](/thumbs/79/80291227.jpg "arxiv: v1 [math.gr] 8 Nov 2008") SUBSPACES OF 7 7 SKEW-SYMMETRIC MATRICES RELATED TO THE GROUP G 2 arxiv:0811.1298v1 [math.gr] 8 Nov 2008 ROD GOW Abstract. Let K be a field of characteristic different from 2 and let C be an octonion algebra
SUBSPACES OF 7 7 SKEW-SYMMETRIC MATRICES RELATED TO THE GROUP G 2 arxiv:0811.1298v1 [math.gr] 8 Nov 2008 ROD GOW Abstract. Let K be a field of characteristic different from 2 and let C be an octonion algebra
CHAPTER 3. Gauss map. In this chapter we will study the Gauss map of surfaces in R 3.
 CHAPTER 3 Gauss map In this chapter we will study the Gauss map of surfaces in R 3. 3.1. Surfaces in R 3 Let S R 3 be a submanifold of dimension 2. Let {U i, ϕ i } be a DS on S. For any p U i we have a
CHAPTER 3 Gauss map In this chapter we will study the Gauss map of surfaces in R 3. 3.1. Surfaces in R 3 Let S R 3 be a submanifold of dimension 2. Let {U i, ϕ i } be a DS on S. For any p U i we have a
L(C G (x) 0 ) c g (x). Proof. Recall C G (x) = {g G xgx 1 = g} and c g (x) = {X g Ad xx = X}. In general, it is obvious that
 0 ) c g (x). Proof. Recall C G (x) = {g G xgx 1 = g} and c g (x) = {X g Ad xx = X}. In general, it is obvious that") ALGEBRAIC GROUPS 61 5. Root systems and semisimple Lie algebras 5.1. Characteristic 0 theory. Assume in this subsection that chark = 0. Let me recall a couple of definitions made earlier: G is called reductive
ALGEBRAIC GROUPS 61 5. Root systems and semisimple Lie algebras 5.1. Characteristic 0 theory. Assume in this subsection that chark = 0. Let me recall a couple of definitions made earlier: G is called reductive
Course 311: Michaelmas Term 2005 Part III: Topics in Commutative Algebra
 Course 311: Michaelmas Term 2005 Part III: Topics in Commutative Algebra D. R. Wilkins Contents 3 Topics in Commutative Algebra 2 3.1 Rings and Fields......................... 2 3.2 Ideals...............................
Course 311: Michaelmas Term 2005 Part III: Topics in Commutative Algebra D. R. Wilkins Contents 3 Topics in Commutative Algebra 2 3.1 Rings and Fields......................... 2 3.2 Ideals...............................
Math Linear Algebra II. 1. Inner Products and Norms
 Math 342 - Linear Algebra II Notes 1. Inner Products and Norms One knows from a basic introduction to vectors in R n Math 254 at OSU) that the length of a vector x = x 1 x 2... x n ) T R n, denoted x,
Math 342 - Linear Algebra II Notes 1. Inner Products and Norms One knows from a basic introduction to vectors in R n Math 254 at OSU) that the length of a vector x = x 1 x 2... x n ) T R n, denoted x,
QUADRATIC ELEMENTS IN A CENTRAL SIMPLE ALGEBRA OF DEGREE FOUR
 QUADRATIC ELEMENTS IN A CENTRAL SIMPLE ALGEBRA OF DEGREE FOUR MARKUS ROST Contents Introduction 1 1. Preliminaries 2 2. Construction of quadratic elements 2 3. Existence of biquadratic subextensions 4
QUADRATIC ELEMENTS IN A CENTRAL SIMPLE ALGEBRA OF DEGREE FOUR MARKUS ROST Contents Introduction 1 1. Preliminaries 2 2. Construction of quadratic elements 2 3. Existence of biquadratic subextensions 4
Exterior powers and Clifford algebras
 10 Exterior powers and Clifford algebras In this chapter, various algebraic constructions (exterior products and Clifford algebras) are used to embed some geometries related to projective and polar spaces
10 Exterior powers and Clifford algebras In this chapter, various algebraic constructions (exterior products and Clifford algebras) are used to embed some geometries related to projective and polar spaces
Division Algebras. Konrad Voelkel
 Division Algebras Konrad Voelkel 2015-01-27 Contents 1 Big Picture 1 2 Algebras 2 2.1 Finite fields................................... 2 2.2 Algebraically closed fields........................... 2 2.3
Division Algebras Konrad Voelkel 2015-01-27 Contents 1 Big Picture 1 2 Algebras 2 2.1 Finite fields................................... 2 2.2 Algebraically closed fields........................... 2 2.3
1 Structures 2. 2 Framework of Riemann surfaces Basic configuration Holomorphic functions... 3
 Compact course notes Riemann surfaces Fall 2011 Professor: S. Lvovski transcribed by: J. Lazovskis Independent University of Moscow December 23, 2011 Contents 1 Structures 2 2 Framework of Riemann surfaces
Compact course notes Riemann surfaces Fall 2011 Professor: S. Lvovski transcribed by: J. Lazovskis Independent University of Moscow December 23, 2011 Contents 1 Structures 2 2 Framework of Riemann surfaces
Math 429/581 (Advanced) Group Theory. Summary of Definitions, Examples, and Theorems by Stefan Gille
 Group Theory. Summary of Definitions, Examples, and Theorems by Stefan Gille") Math 429/581 (Advanced) Group Theory Summary of Definitions, Examples, and Theorems by Stefan Gille 1 2 0. Group Operations 0.1. Definition. Let G be a group and X a set. A (left) operation of G on X is
Math 429/581 (Advanced) Group Theory Summary of Definitions, Examples, and Theorems by Stefan Gille 1 2 0. Group Operations 0.1. Definition. Let G be a group and X a set. A (left) operation of G on X is
Introduction to Modern Quantum Field Theory
 Department of Mathematics University of Texas at Arlington Arlington, TX USA Febuary, 2016 Recall Einstein s famous equation, E 2 = (Mc 2 ) 2 + (c p) 2, where c is the speed of light, M is the classical
Department of Mathematics University of Texas at Arlington Arlington, TX USA Febuary, 2016 Recall Einstein s famous equation, E 2 = (Mc 2 ) 2 + (c p) 2, where c is the speed of light, M is the classical
Special Lecture - The Octionions
 Special Lecture - The Octionions March 15, 2013 1 R 1.1 Definition Not much needs to be said here. From the God given natural numbers, we algebraically build Z and Q. Then create a topology from the distance
Special Lecture - The Octionions March 15, 2013 1 R 1.1 Definition Not much needs to be said here. From the God given natural numbers, we algebraically build Z and Q. Then create a topology from the distance
DIFFERENTIAL GEOMETRY HW 12
 DIFFERENTIAL GEOMETRY HW 1 CLAY SHONKWILER 3 Find the Lie algebra so(n) of the special orthogonal group SO(n), and the explicit formula for the Lie bracket there. Proof. Since SO(n) is a subgroup of GL(n),
DIFFERENTIAL GEOMETRY HW 1 CLAY SHONKWILER 3 Find the Lie algebra so(n) of the special orthogonal group SO(n), and the explicit formula for the Lie bracket there. Proof. Since SO(n) is a subgroup of GL(n),
Combinatorics and geometry of E 7
 Combinatorics and geometry of E 7 Steven Sam University of California, Berkeley September 19, 2012 1/24 Outline Macdonald representations Vinberg representations Root system Weyl group 7 points in P 2
Combinatorics and geometry of E 7 Steven Sam University of California, Berkeley September 19, 2012 1/24 Outline Macdonald representations Vinberg representations Root system Weyl group 7 points in P 2
Some notes on Coxeter groups
 Some notes on Coxeter groups Brooks Roberts November 28, 2017 CONTENTS 1 Contents 1 Sources 2 2 Reflections 3 3 The orthogonal group 7 4 Finite subgroups in two dimensions 9 5 Finite subgroups in three
Some notes on Coxeter groups Brooks Roberts November 28, 2017 CONTENTS 1 Contents 1 Sources 2 2 Reflections 3 3 The orthogonal group 7 4 Finite subgroups in two dimensions 9 5 Finite subgroups in three
Existence and Regularity of Stable Branched Minimal Hypersurfaces
 Pure and Applied Mathematics Quarterly Volume 3, Number 2 (Special Issue: In honor of Leon Simon, Part 1 of 2 ) 569 594, 2007 Existence and Regularity of Stable Branched Minimal Hypersurfaces Neshan Wickramasekera
Pure and Applied Mathematics Quarterly Volume 3, Number 2 (Special Issue: In honor of Leon Simon, Part 1 of 2 ) 569 594, 2007 Existence and Regularity of Stable Branched Minimal Hypersurfaces Neshan Wickramasekera
arxiv: v6 [math.mg] 9 May 2014
![arxiv: v6 [math.mg] 9 May 2014](/thumbs/83/88763528.jpg "arxiv: v6 [math.mg] 9 May 2014") arxiv:1311.0131v6 [math.mg] 9 May 2014 A Clifford algebraic Approach to Line Geometry Daniel Klawitter Abstract. In this paper we combine methods from projective geometry, Klein s model, and Clifford algebra.
arxiv:1311.0131v6 [math.mg] 9 May 2014 A Clifford algebraic Approach to Line Geometry Daniel Klawitter Abstract. In this paper we combine methods from projective geometry, Klein s model, and Clifford algebra.
Chern numbers and Hilbert Modular Varieties
 Chern numbers and Hilbert Modular Varieties Dylan Attwell-Duval Department of Mathematics and Statistics McGill University Montreal, Quebec attwellduval@math.mcgill.ca April 9, 2011 A Topological Point
Chern numbers and Hilbert Modular Varieties Dylan Attwell-Duval Department of Mathematics and Statistics McGill University Montreal, Quebec attwellduval@math.mcgill.ca April 9, 2011 A Topological Point
A Problem of Hsiang-Palais-Terng on Isoparametric Submanifolds
 arxiv:math/0312251v1 [math.dg] 12 Dec 2003 A Problem of Hsiang-Palais-Terng on Isoparametric Submanifolds Haibao Duan Institute of Mathematics, Chinese Academy of Sciences, Beijing 100080, dhb@math.ac.cn
arxiv:math/0312251v1 [math.dg] 12 Dec 2003 A Problem of Hsiang-Palais-Terng on Isoparametric Submanifolds Haibao Duan Institute of Mathematics, Chinese Academy of Sciences, Beijing 100080, dhb@math.ac.cn
COURSE SUMMARY FOR MATH 504, FALL QUARTER : MODERN ALGEBRA
 COURSE SUMMARY FOR MATH 504, FALL QUARTER 2017-8: MODERN ALGEBRA JAROD ALPER Week 1, Sept 27, 29: Introduction to Groups Lecture 1: Introduction to groups. Defined a group and discussed basic properties
COURSE SUMMARY FOR MATH 504, FALL QUARTER 2017-8: MODERN ALGEBRA JAROD ALPER Week 1, Sept 27, 29: Introduction to Groups Lecture 1: Introduction to groups. Defined a group and discussed basic properties
1. Let r, s, t, v be the homogeneous relations defined on the set M = {2, 3, 4, 5, 6} by
 Seminar 1 1. Which ones of the usual symbols of addition, subtraction, multiplication and division define an operation (composition law) on the numerical sets N, Z, Q, R, C? 2. Let A = {a 1, a 2, a 3 }.
Seminar 1 1. Which ones of the usual symbols of addition, subtraction, multiplication and division define an operation (composition law) on the numerical sets N, Z, Q, R, C? 2. Let A = {a 1, a 2, a 3 }.
10. Smooth Varieties. 82 Andreas Gathmann
 82 Andreas Gathmann 10. Smooth Varieties Let a be a point on a variety X. In the last chapter we have introduced the tangent cone C a X as a way to study X locally around a (see Construction 9.20). It
82 Andreas Gathmann 10. Smooth Varieties Let a be a point on a variety X. In the last chapter we have introduced the tangent cone C a X as a way to study X locally around a (see Construction 9.20). It
Clifford Algebras and Spin Groups
 Clifford Algebras and Spin Groups Math G4344, Spring 2012 We ll now turn from the general theory to examine a specific class class of groups: the orthogonal groups. Recall that O(n, R) is the group of
Clifford Algebras and Spin Groups Math G4344, Spring 2012 We ll now turn from the general theory to examine a specific class class of groups: the orthogonal groups. Recall that O(n, R) is the group of
Linear Algebra. Min Yan
 Linear Algebra Min Yan January 2, 2018 2 Contents 1 Vector Space 7 1.1 Definition................................. 7 1.1.1 Axioms of Vector Space..................... 7 1.1.2 Consequence of Axiom......................
Linear Algebra Min Yan January 2, 2018 2 Contents 1 Vector Space 7 1.1 Definition................................. 7 1.1.1 Axioms of Vector Space..................... 7 1.1.2 Consequence of Axiom......................
LECTURE 3: REPRESENTATION THEORY OF SL 2 (C) AND sl 2 (C)
 AND sl 2 (C)") LECTURE 3: REPRESENTATION THEORY OF SL 2 (C) AND sl 2 (C) IVAN LOSEV Introduction We proceed to studying the representation theory of algebraic groups and Lie algebras. Algebraic groups are the groups
LECTURE 3: REPRESENTATION THEORY OF SL 2 (C) AND sl 2 (C) IVAN LOSEV Introduction We proceed to studying the representation theory of algebraic groups and Lie algebras. Algebraic groups are the groups
On John type ellipsoids
 On John type ellipsoids B. Klartag Tel Aviv University Abstract Given an arbitrary convex symmetric body K R n, we construct a natural and non-trivial continuous map u K which associates ellipsoids to
On John type ellipsoids B. Klartag Tel Aviv University Abstract Given an arbitrary convex symmetric body K R n, we construct a natural and non-trivial continuous map u K which associates ellipsoids to
Elementary linear algebra
 Chapter 1 Elementary linear algebra 1.1 Vector spaces Vector spaces owe their importance to the fact that so many models arising in the solutions of specific problems turn out to be vector spaces. The
Chapter 1 Elementary linear algebra 1.1 Vector spaces Vector spaces owe their importance to the fact that so many models arising in the solutions of specific problems turn out to be vector spaces. The
DIFFERENTIAL GEOMETRY CLASS NOTES INSTRUCTOR: F. MARQUES. September 25, 2015
 DIFFERENTIAL GEOMETRY CLASS NOTES INSTRUCTOR: F. MARQUES MAGGIE MILLER September 25, 2015 1. 09/16/2015 1.1. Textbooks. Textbooks relevant to this class are Riemannian Geometry by do Carmo Riemannian Geometry
DIFFERENTIAL GEOMETRY CLASS NOTES INSTRUCTOR: F. MARQUES MAGGIE MILLER September 25, 2015 1. 09/16/2015 1.1. Textbooks. Textbooks relevant to this class are Riemannian Geometry by do Carmo Riemannian Geometry
over a field F with char F 2: we define
 Chapter 3 Involutions In this chapter, we define the standard involution (also called conjugation) on a quaternion algebra. In this way, we characterize division quaternion algebras as noncommutative division
Chapter 3 Involutions In this chapter, we define the standard involution (also called conjugation) on a quaternion algebra. In this way, we characterize division quaternion algebras as noncommutative division
Lecture 21 - Jordan Algebras and Projective Spaces
 Lecture 1 - Jordan Algebras and Projective Spaces April 15, 013 References: Jordan Operator Algebras. H. Hanche-Olsen and E. Stormer The Octonions. J. Baez 1 Jordan Algebras 1.1 Definition and examples
Lecture 1 - Jordan Algebras and Projective Spaces April 15, 013 References: Jordan Operator Algebras. H. Hanche-Olsen and E. Stormer The Octonions. J. Baez 1 Jordan Algebras 1.1 Definition and examples
η = (e 1 (e 2 φ)) # = e 3
) # = e 3") Research Statement My research interests lie in differential geometry and geometric analysis. My work has concentrated according to two themes. The first is the study of submanifolds of spaces with riemannian
Research Statement My research interests lie in differential geometry and geometric analysis. My work has concentrated according to two themes. The first is the study of submanifolds of spaces with riemannian
Lie Algebra of Unit Tangent Bundle in Minkowski 3-Space
 INTERNATIONAL ELECTRONIC JOURNAL OF GEOMETRY VOLUME 12 NO. 1 PAGE 1 (2019) Lie Algebra of Unit Tangent Bundle in Minkowski 3-Space Murat Bekar (Communicated by Levent Kula ) ABSTRACT In this paper, a one-to-one
INTERNATIONAL ELECTRONIC JOURNAL OF GEOMETRY VOLUME 12 NO. 1 PAGE 1 (2019) Lie Algebra of Unit Tangent Bundle in Minkowski 3-Space Murat Bekar (Communicated by Levent Kula ) ABSTRACT In this paper, a one-to-one
Chapter 1. Preliminaries. The purpose of this chapter is to provide some basic background information. Linear Space. Hilbert Space.
 Chapter 1 Preliminaries The purpose of this chapter is to provide some basic background information. Linear Space Hilbert Space Basic Principles 1 2 Preliminaries Linear Space The notion of linear space
Chapter 1 Preliminaries The purpose of this chapter is to provide some basic background information. Linear Space Hilbert Space Basic Principles 1 2 Preliminaries Linear Space The notion of linear space
Brunn Minkowski Theory in Minkowski space-times. François Fillastre Université de Cergy Pontoise France
 Brunn Minkowski Theory in Minkowski space-times François Fillastre Université de Cergy Pontoise France Convex bodies A convex body is a (non empty) compact convex set of R d+1 Convex bodies A convex body
Brunn Minkowski Theory in Minkowski space-times François Fillastre Université de Cergy Pontoise France Convex bodies A convex body is a (non empty) compact convex set of R d+1 Convex bodies A convex body
Algebraic Curves and Riemann Surfaces
 Algebraic Curves and Riemann Surfaces Rick Miranda Graduate Studies in Mathematics Volume 5 If American Mathematical Society Contents Preface xix Chapter I. Riemann Surfaces: Basic Definitions 1 1. Complex
Algebraic Curves and Riemann Surfaces Rick Miranda Graduate Studies in Mathematics Volume 5 If American Mathematical Society Contents Preface xix Chapter I. Riemann Surfaces: Basic Definitions 1 1. Complex
1 Hermitian symmetric spaces: examples and basic properties
 Contents 1 Hermitian symmetric spaces: examples and basic properties 1 1.1 Almost complex manifolds............................................ 1 1.2 Hermitian manifolds................................................
Contents 1 Hermitian symmetric spaces: examples and basic properties 1 1.1 Almost complex manifolds............................................ 1 1.2 Hermitian manifolds................................................
(3) Let Y be a totally bounded subset of a metric space X. Then the closure Y of Y
 Let Y be a totally bounded subset of a metric space X. Then the closure Y of Y") () Consider A = { q Q : q 2 2} as a subset of the metric space (Q, d), where d(x, y) = x y. Then A is A) closed but not open in Q B) open but not closed in Q C) neither open nor closed in Q D) both open
() Consider A = { q Q : q 2 2} as a subset of the metric space (Q, d), where d(x, y) = x y. Then A is A) closed but not open in Q B) open but not closed in Q C) neither open nor closed in Q D) both open
Title Project Summary
 Title Project Summary The aim of the project is an estimation theory of those special functions of analysis called zeta functions after the zeta function of Euler (1730). The desired estimates generalize
Title Project Summary The aim of the project is an estimation theory of those special functions of analysis called zeta functions after the zeta function of Euler (1730). The desired estimates generalize
Algebra Exam Syllabus
 Algebra Exam Syllabus The Algebra comprehensive exam covers four broad areas of algebra: (1) Groups; (2) Rings; (3) Modules; and (4) Linear Algebra. These topics are all covered in the first semester graduate
Algebra Exam Syllabus The Algebra comprehensive exam covers four broad areas of algebra: (1) Groups; (2) Rings; (3) Modules; and (4) Linear Algebra. These topics are all covered in the first semester graduate
The Classification of Automorphism Groups of Rational Elliptic Surfaces With Section
 University of Pennsylvania ScholarlyCommons Publicly Accessible Penn Dissertations Spring 5-16-011 The Classification of Automorphism Groups of Rational Elliptic Surfaces With Section Tolga Karayayla tkarayay@math.upenn.edu
University of Pennsylvania ScholarlyCommons Publicly Accessible Penn Dissertations Spring 5-16-011 The Classification of Automorphism Groups of Rational Elliptic Surfaces With Section Tolga Karayayla tkarayay@math.upenn.edu
Small zeros of hermitian forms over quaternion algebras. Lenny Fukshansky Claremont McKenna College & IHES (joint work with W. K.
 Small zeros of hermitian forms over quaternion algebras Lenny Fukshansky Claremont McKenna College & IHES (joint work with W. K. Chan) Institut de Mathématiques de Jussieu October 21, 2010 1 Cassels Theorem
Small zeros of hermitian forms over quaternion algebras Lenny Fukshansky Claremont McKenna College & IHES (joint work with W. K. Chan) Institut de Mathématiques de Jussieu October 21, 2010 1 Cassels Theorem
BERNARD RUSSO. University of California, Irvine
 A HOLOMORPHIC CHARACTERIZATION OF OPERATOR ALGEBRAS (JOINT WORK WITH MATT NEAL) BERNARD RUSSO University of California, Irvine UNIVERSITY OF CALIFORNIA, IRVINE ANALYSIS SEMINAR OCTOBER 16, 2012 KEYWORDS
A HOLOMORPHIC CHARACTERIZATION OF OPERATOR ALGEBRAS (JOINT WORK WITH MATT NEAL) BERNARD RUSSO University of California, Irvine UNIVERSITY OF CALIFORNIA, IRVINE ANALYSIS SEMINAR OCTOBER 16, 2012 KEYWORDS
where m is the maximal ideal of O X,p. Note that m/m 2 is a vector space. Suppose that we are given a morphism
 8. Smoothness and the Zariski tangent space We want to give an algebraic notion of the tangent space. In differential geometry, tangent vectors are equivalence classes of maps of intervals in R into the
8. Smoothness and the Zariski tangent space We want to give an algebraic notion of the tangent space. In differential geometry, tangent vectors are equivalence classes of maps of intervals in R into the
Hyperbolic Weyl Groups
 Hyperbolic Weyl Groups Alex Feingold 1 Daniel Vallières 1,2 1 Department of Mathematical Sciences, State University of New York Binghamton, New York, 2 Mathematics and Statistics Department, University
Hyperbolic Weyl Groups Alex Feingold 1 Daniel Vallières 1,2 1 Department of Mathematical Sciences, State University of New York Binghamton, New York, 2 Mathematics and Statistics Department, University
Part II. Geometry and Groups. Year
 Part II Year 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2014 Paper 4, Section I 3F 49 Define the limit set Λ(G) of a Kleinian group G. Assuming that G has no finite orbit in H 3 S 2, and that Λ(G),
Part II Year 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2014 Paper 4, Section I 3F 49 Define the limit set Λ(G) of a Kleinian group G. Assuming that G has no finite orbit in H 3 S 2, and that Λ(G),
12. Hilbert Polynomials and Bézout s Theorem
 12. Hilbert Polynomials and Bézout s Theorem 95 12. Hilbert Polynomials and Bézout s Theorem After our study of smooth cubic surfaces in the last chapter, let us now come back to the general theory of
12. Hilbert Polynomials and Bézout s Theorem 95 12. Hilbert Polynomials and Bézout s Theorem After our study of smooth cubic surfaces in the last chapter, let us now come back to the general theory of
INSTANTON MODULI AND COMPACTIFICATION MATTHEW MAHOWALD
 INSTANTON MODULI AND COMPACTIFICATION MATTHEW MAHOWALD () Instanton (definition) (2) ADHM construction (3) Compactification. Instantons.. Notation. Throughout this talk, we will use the following notation:
INSTANTON MODULI AND COMPACTIFICATION MATTHEW MAHOWALD () Instanton (definition) (2) ADHM construction (3) Compactification. Instantons.. Notation. Throughout this talk, we will use the following notation:
Minimal submanifolds: old and new
 Minimal submanifolds: old and new Richard Schoen Stanford University - Chen-Jung Hsu Lecture 1, Academia Sinica, ROC - December 2, 2013 Plan of Lecture Part 1: Volume, mean curvature, and minimal submanifolds
Minimal submanifolds: old and new Richard Schoen Stanford University - Chen-Jung Hsu Lecture 1, Academia Sinica, ROC - December 2, 2013 Plan of Lecture Part 1: Volume, mean curvature, and minimal submanifolds
Geometry. Separating Maps of the Lattice E 8 and Triangulations of the Eight-Dimensional Torus. G. Dartois and A. Grigis.
 Discrete Comput Geom 3:555 567 (000) DOI: 0.007/s004540000 Discrete & Computational Geometry 000 Springer-Verlag New York Inc. Separating Maps of the Lattice E 8 and Triangulations of the Eight-Dimensional
Discrete Comput Geom 3:555 567 (000) DOI: 0.007/s004540000 Discrete & Computational Geometry 000 Springer-Verlag New York Inc. Separating Maps of the Lattice E 8 and Triangulations of the Eight-Dimensional
Stable minimal cones in R 8 and R 9 with constant scalar curvature
 Revista Colombiana de Matemáticas Volumen 6 (2002), páginas 97 106 Stable minimal cones in R 8 and R 9 with constant scalar curvature Oscar Perdomo* Universidad del Valle, Cali, COLOMBIA Abstract. In this
Revista Colombiana de Matemáticas Volumen 6 (2002), páginas 97 106 Stable minimal cones in R 8 and R 9 with constant scalar curvature Oscar Perdomo* Universidad del Valle, Cali, COLOMBIA Abstract. In this
Math Exam 2, October 14, 2008
 Math 96 - Exam 2, October 4, 28 Name: Problem (5 points Find all solutions to the following system of linear equations, check your work: x + x 2 x 3 2x 2 2x 3 2 x x 2 + x 3 2 Solution Let s perform Gaussian
Math 96 - Exam 2, October 4, 28 Name: Problem (5 points Find all solutions to the following system of linear equations, check your work: x + x 2 x 3 2x 2 2x 3 2 x x 2 + x 3 2 Solution Let s perform Gaussian
Linear connections on Lie groups
 Linear connections on Lie groups The affine space of linear connections on a compact Lie group G contains a distinguished line segment with endpoints the connections L and R which make left (resp. right)
Linear connections on Lie groups The affine space of linear connections on a compact Lie group G contains a distinguished line segment with endpoints the connections L and R which make left (resp. right)
Polynomial mappings into a Stiefel manifold and immersions
 Polynomial mappings into a Stiefel manifold and immersions Iwona Krzyżanowska Zbigniew Szafraniec November 2011 Abstract For a polynomial mapping from S n k to the Stiefel manifold Ṽk(R n ), where n k
Polynomial mappings into a Stiefel manifold and immersions Iwona Krzyżanowska Zbigniew Szafraniec November 2011 Abstract For a polynomial mapping from S n k to the Stiefel manifold Ṽk(R n ), where n k
Outline of the Seminar Topics on elliptic curves Saarbrücken,
 Outline of the Seminar Topics on elliptic curves Saarbrücken, 11.09.2017 Contents A Number theory and algebraic geometry 2 B Elliptic curves 2 1 Rational points on elliptic curves (Mordell s Theorem) 5
Outline of the Seminar Topics on elliptic curves Saarbrücken, 11.09.2017 Contents A Number theory and algebraic geometry 2 B Elliptic curves 2 1 Rational points on elliptic curves (Mordell s Theorem) 5
div(f ) = D and deg(d) = deg(f ) = d i deg(f i ) (compare this with the definitions for smooth curves). Let:
 = D and deg(d) = deg(f ) = d i deg(f i ) (compare this with the definitions for smooth curves). Let:") Algebraic Curves/Fall 015 Aaron Bertram 4. Projective Plane Curves are hypersurfaces in the plane CP. When nonsingular, they are Riemann surfaces, but we will also consider plane curves with singularities.
Algebraic Curves/Fall 015 Aaron Bertram 4. Projective Plane Curves are hypersurfaces in the plane CP. When nonsingular, they are Riemann surfaces, but we will also consider plane curves with singularities.
The moduli space of binary quintics
 The moduli space of binary quintics A.A.du Plessis and C.T.C.Wall November 10, 2005 1 Invariant theory From classical invariant theory (we refer to the version in [2]), we find that the ring of (SL 2 )invariants
The moduli space of binary quintics A.A.du Plessis and C.T.C.Wall November 10, 2005 1 Invariant theory From classical invariant theory (we refer to the version in [2]), we find that the ring of (SL 2 )invariants
BERNARD RUSSO. University of California, Irvine
 A HOLOMORPHIC CHARACTERIZATION OF OPERATOR ALGEBRAS (JOINT WORK WITH MATT NEAL) BERNARD RUSSO University of California, Irvine UNIVERSITY OF HOUSTON GREAT PLAINS OPERATOR THEORY SYMPOSIUM MAY 30-JUNE 2,
A HOLOMORPHIC CHARACTERIZATION OF OPERATOR ALGEBRAS (JOINT WORK WITH MATT NEAL) BERNARD RUSSO University of California, Irvine UNIVERSITY OF HOUSTON GREAT PLAINS OPERATOR THEORY SYMPOSIUM MAY 30-JUNE 2,
1. General Vector Spaces
 1.1. Vector space axioms. 1. General Vector Spaces Definition 1.1. Let V be a nonempty set of objects on which the operations of addition and scalar multiplication are defined. By addition we mean a rule
1.1. Vector space axioms. 1. General Vector Spaces Definition 1.1. Let V be a nonempty set of objects on which the operations of addition and scalar multiplication are defined. By addition we mean a rule
APPENDIX A. Background Mathematics. A.1 Linear Algebra. Vector algebra. Let x denote the n-dimensional column vector with components x 1 x 2.
 APPENDIX A Background Mathematics A. Linear Algebra A.. Vector algebra Let x denote the n-dimensional column vector with components 0 x x 2 B C @. A x n Definition 6 (scalar product). The scalar product
APPENDIX A Background Mathematics A. Linear Algebra A.. Vector algebra Let x denote the n-dimensional column vector with components 0 x x 2 B C @. A x n Definition 6 (scalar product). The scalar product
Hopf Fibrations. Consider a classical magnetization field in R 3 which is longitidinally stiff and transversally soft.
 Helmut Eschrig Leibniz-Institut für Festkörper- und Werkstofforschung Dresden Leibniz-Institute for Solid State and Materials Research Dresden Hopf Fibrations Consider a classical magnetization field in
Helmut Eschrig Leibniz-Institut für Festkörper- und Werkstofforschung Dresden Leibniz-Institute for Solid State and Materials Research Dresden Hopf Fibrations Consider a classical magnetization field in
LECTURE 25-26: CARTAN S THEOREM OF MAXIMAL TORI. 1. Maximal Tori
 LECTURE 25-26: CARTAN S THEOREM OF MAXIMAL TORI 1. Maximal Tori By a torus we mean a compact connected abelian Lie group, so a torus is a Lie group that is isomorphic to T n = R n /Z n. Definition 1.1.
LECTURE 25-26: CARTAN S THEOREM OF MAXIMAL TORI 1. Maximal Tori By a torus we mean a compact connected abelian Lie group, so a torus is a Lie group that is isomorphic to T n = R n /Z n. Definition 1.1.
Introduction to Group Theory
 Chapter 10 Introduction to Group Theory Since symmetries described by groups play such an important role in modern physics, we will take a little time to introduce the basic structure (as seen by a physicist)
Chapter 10 Introduction to Group Theory Since symmetries described by groups play such an important role in modern physics, we will take a little time to introduce the basic structure (as seen by a physicist)
Compact symetric bilinear forms
 Compact symetric bilinear forms Mihai Mathematics Department UC Santa Barbara IWOTA 2006 IWOTA 2006 Compact forms [1] joint work with: J. Danciger (Stanford) S. Garcia (Pomona
Compact symetric bilinear forms Mihai Mathematics Department UC Santa Barbara IWOTA 2006 IWOTA 2006 Compact forms [1] joint work with: J. Danciger (Stanford) S. Garcia (Pomona
LECTURE 5: SURFACES IN PROJECTIVE SPACE. 1. Projective space
 LECTURE 5: SURFACES IN PROJECTIVE SPACE. Projective space Definition: The n-dimensional projective space P n is the set of lines through the origin in the vector space R n+. P n may be thought of as the
LECTURE 5: SURFACES IN PROJECTIVE SPACE. Projective space Definition: The n-dimensional projective space P n is the set of lines through the origin in the vector space R n+. P n may be thought of as the
ARCS IN FINITE PROJECTIVE SPACES. Basic objects and definitions
 ARCS IN FINITE PROJECTIVE SPACES SIMEON BALL Abstract. These notes are an outline of a course on arcs given at the Finite Geometry Summer School, University of Sussex, June 26-30, 2017. Let K denote an
ARCS IN FINITE PROJECTIVE SPACES SIMEON BALL Abstract. These notes are an outline of a course on arcs given at the Finite Geometry Summer School, University of Sussex, June 26-30, 2017. Let K denote an
GRE Subject test preparation Spring 2016 Topic: Abstract Algebra, Linear Algebra, Number Theory.
 GRE Subject test preparation Spring 2016 Topic: Abstract Algebra, Linear Algebra, Number Theory. Linear Algebra Standard matrix manipulation to compute the kernel, intersection of subspaces, column spaces,
GRE Subject test preparation Spring 2016 Topic: Abstract Algebra, Linear Algebra, Number Theory. Linear Algebra Standard matrix manipulation to compute the kernel, intersection of subspaces, column spaces,
Linear Algebra. Workbook
 Linear Algebra Workbook Paul Yiu Department of Mathematics Florida Atlantic University Last Update: November 21 Student: Fall 2011 Checklist Name: A B C D E F F G H I J 1 2 3 4 5 6 7 8 9 10 xxx xxx xxx
Linear Algebra Workbook Paul Yiu Department of Mathematics Florida Atlantic University Last Update: November 21 Student: Fall 2011 Checklist Name: A B C D E F F G H I J 1 2 3 4 5 6 7 8 9 10 xxx xxx xxx
Lecture 1. Toric Varieties: Basics
 Lecture 1. Toric Varieties: Basics Taras Panov Lomonosov Moscow State University Summer School Current Developments in Geometry Novosibirsk, 27 August1 September 2018 Taras Panov (Moscow University) Lecture
Lecture 1. Toric Varieties: Basics Taras Panov Lomonosov Moscow State University Summer School Current Developments in Geometry Novosibirsk, 27 August1 September 2018 Taras Panov (Moscow University) Lecture
Modern Geometric Structures and Fields
 Modern Geometric Structures and Fields S. P. Novikov I.A.TaJmanov Translated by Dmitry Chibisov Graduate Studies in Mathematics Volume 71 American Mathematical Society Providence, Rhode Island Preface
Modern Geometric Structures and Fields S. P. Novikov I.A.TaJmanov Translated by Dmitry Chibisov Graduate Studies in Mathematics Volume 71 American Mathematical Society Providence, Rhode Island Preface
The Spinor Representation
 The Spinor Representation Math G4344, Spring 2012 As we have seen, the groups Spin(n) have a representation on R n given by identifying v R n as an element of the Clifford algebra C(n) and having g Spin(n)
The Spinor Representation Math G4344, Spring 2012 As we have seen, the groups Spin(n) have a representation on R n given by identifying v R n as an element of the Clifford algebra C(n) and having g Spin(n)
THE EULER CHARACTERISTIC OF A LIE GROUP
 THE EULER CHARACTERISTIC OF A LIE GROUP JAY TAYLOR 1 Examples of Lie Groups The following is adapted from [2] We begin with the basic definition and some core examples Definition A Lie group is a smooth
THE EULER CHARACTERISTIC OF A LIE GROUP JAY TAYLOR 1 Examples of Lie Groups The following is adapted from [2] We begin with the basic definition and some core examples Definition A Lie group is a smooth
Algebra Questions. May 13, Groups 1. 2 Classification of Finite Groups 4. 3 Fields and Galois Theory 5. 4 Normal Forms 9
 Algebra Questions May 13, 2013 Contents 1 Groups 1 2 Classification of Finite Groups 4 3 Fields and Galois Theory 5 4 Normal Forms 9 5 Matrices and Linear Algebra 10 6 Rings 11 7 Modules 13 8 Representation
Algebra Questions May 13, 2013 Contents 1 Groups 1 2 Classification of Finite Groups 4 3 Fields and Galois Theory 5 4 Normal Forms 9 5 Matrices and Linear Algebra 10 6 Rings 11 7 Modules 13 8 Representation
BRST and Dirac Cohomology
 BRST and Dirac Cohomology Peter Woit Columbia University Dartmouth Math Dept., October 23, 2008 Peter Woit (Columbia University) BRST and Dirac Cohomology October 2008 1 / 23 Outline 1 Introduction 2 Representation
BRST and Dirac Cohomology Peter Woit Columbia University Dartmouth Math Dept., October 23, 2008 Peter Woit (Columbia University) BRST and Dirac Cohomology October 2008 1 / 23 Outline 1 Introduction 2 Representation
1 Fields and vector spaces
 1 Fields and vector spaces In this section we revise some algebraic preliminaries and establish notation. 1.1 Division rings and fields A division ring, or skew field, is a structure F with two binary
1 Fields and vector spaces In this section we revise some algebraic preliminaries and establish notation. 1.1 Division rings and fields A division ring, or skew field, is a structure F with two binary
MATH 326: RINGS AND MODULES STEFAN GILLE
 MATH 326: RINGS AND MODULES STEFAN GILLE 1 2 STEFAN GILLE 1. Rings We recall first the definition of a group. 1.1. Definition. Let G be a non empty set. The set G is called a group if there is a map called
MATH 326: RINGS AND MODULES STEFAN GILLE 1 2 STEFAN GILLE 1. Rings We recall first the definition of a group. 1.1. Definition. Let G be a non empty set. The set G is called a group if there is a map called
Department of Mathematics, University of California, Berkeley. GRADUATE PRELIMINARY EXAMINATION, Part A Fall Semester 2016
 Department of Mathematics, University of California, Berkeley YOUR 1 OR 2 DIGIT EXAM NUMBER GRADUATE PRELIMINARY EXAMINATION, Part A Fall Semester 2016 1. Please write your 1- or 2-digit exam number on
Department of Mathematics, University of California, Berkeley YOUR 1 OR 2 DIGIT EXAM NUMBER GRADUATE PRELIMINARY EXAMINATION, Part A Fall Semester 2016 1. Please write your 1- or 2-digit exam number on
Highest-weight Theory: Verma Modules
 Highest-weight Theory: Verma Modules Math G4344, Spring 2012 We will now turn to the problem of classifying and constructing all finitedimensional representations of a complex semi-simple Lie algebra (or,
Highest-weight Theory: Verma Modules Math G4344, Spring 2012 We will now turn to the problem of classifying and constructing all finitedimensional representations of a complex semi-simple Lie algebra (or,
Problem set 2. Math 212b February 8, 2001 due Feb. 27
 Problem set 2 Math 212b February 8, 2001 due Feb. 27 Contents 1 The L 2 Euler operator 1 2 Symplectic vector spaces. 2 2.1 Special kinds of subspaces....................... 3 2.2 Normal forms..............................
Problem set 2 Math 212b February 8, 2001 due Feb. 27 Contents 1 The L 2 Euler operator 1 2 Symplectic vector spaces. 2 2.1 Special kinds of subspaces....................... 3 2.2 Normal forms..............................
Part II. Riemann Surfaces. Year
 Part II Year 2018 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2018 96 Paper 2, Section II 23F State the uniformisation theorem. List without proof the Riemann surfaces which are uniformised
Part II Year 2018 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2018 96 Paper 2, Section II 23F State the uniformisation theorem. List without proof the Riemann surfaces which are uniformised
Background on Chevalley Groups Constructed from a Root System
 Background on Chevalley Groups Constructed from a Root System Paul Tokorcheck Department of Mathematics University of California, Santa Cruz 10 October 2011 Abstract In 1955, Claude Chevalley described
Background on Chevalley Groups Constructed from a Root System Paul Tokorcheck Department of Mathematics University of California, Santa Cruz 10 October 2011 Abstract In 1955, Claude Chevalley described
Group Theory - QMII 2017
 Group Theory - QMII 017 Reminder Last time we said that a group element of a matrix lie group can be written as an exponent: U = e iαaxa, a = 1,..., N. We called X a the generators, we have N of them,
Group Theory - QMII 017 Reminder Last time we said that a group element of a matrix lie group can be written as an exponent: U = e iαaxa, a = 1,..., N. We called X a the generators, we have N of them,
Algebraic Number Theory
 TIFR VSRP Programme Project Report Algebraic Number Theory Milind Hegde Under the guidance of Prof. Sandeep Varma July 4, 2015 A C K N O W L E D G M E N T S I would like to express my thanks to TIFR for
TIFR VSRP Programme Project Report Algebraic Number Theory Milind Hegde Under the guidance of Prof. Sandeep Varma July 4, 2015 A C K N O W L E D G M E N T S I would like to express my thanks to TIFR for
Special cubic fourfolds
 Special cubic fourfolds 1 Hodge diamonds Let X be a cubic fourfold, h H 2 (X, Z) be the (Poincaré dual to the) hyperplane class. We have h 4 = deg(x) = 3. By the Lefschetz hyperplane theorem, one knows
Special cubic fourfolds 1 Hodge diamonds Let X be a cubic fourfold, h H 2 (X, Z) be the (Poincaré dual to the) hyperplane class. We have h 4 = deg(x) = 3. By the Lefschetz hyperplane theorem, one knows
Multivariable Calculus
 2 Multivariable Calculus 2.1 Limits and Continuity Problem 2.1.1 (Fa94) Let the function f : R n R n satisfy the following two conditions: (i) f (K ) is compact whenever K is a compact subset of R n. (ii)
2 Multivariable Calculus 2.1 Limits and Continuity Problem 2.1.1 (Fa94) Let the function f : R n R n satisfy the following two conditions: (i) f (K ) is compact whenever K is a compact subset of R n. (ii)
4. Killing form, root space inner product, and commutation relations * version 1.5 *
 4. Killing form, root space inner product, and commutation relations * version 1.5 * Matthew Foster September 12, 2016 Contents 4.1 Weights in the Cartan-Weyl basis; rank-r bases for H and H 1 4.2 The
4. Killing form, root space inner product, and commutation relations * version 1.5 * Matthew Foster September 12, 2016 Contents 4.1 Weights in the Cartan-Weyl basis; rank-r bases for H and H 1 4.2 The
10. Cartan Weyl basis
 10. Cartan Weyl basis 1 10. Cartan Weyl basis From this point on, the discussion will be restricted to semi-simple Lie algebras, which are the ones of principal interest in physics. In dealing with the
10. Cartan Weyl basis 1 10. Cartan Weyl basis From this point on, the discussion will be restricted to semi-simple Lie algebras, which are the ones of principal interest in physics. In dealing with the
Lecture 2: Linear Algebra Review
 EE 227A: Convex Optimization and Applications January 19 Lecture 2: Linear Algebra Review Lecturer: Mert Pilanci Reading assignment: Appendix C of BV. Sections 2-6 of the web textbook 1 2.1 Vectors 2.1.1
EE 227A: Convex Optimization and Applications January 19 Lecture 2: Linear Algebra Review Lecturer: Mert Pilanci Reading assignment: Appendix C of BV. Sections 2-6 of the web textbook 1 2.1 Vectors 2.1.1
On the singular elements of a semisimple Lie algebra and the generalized Amitsur-Levitski Theorem
 On the singular elements of a semisimple Lie algebra and the generalized Amitsur-Levitski Theorem Bertram Kostant, MIT Conference on Representations of Reductive Groups Salt Lake City, Utah July 10, 2013
On the singular elements of a semisimple Lie algebra and the generalized Amitsur-Levitski Theorem Bertram Kostant, MIT Conference on Representations of Reductive Groups Salt Lake City, Utah July 10, 2013
SOME SPECIAL KLEINIAN GROUPS AND THEIR ORBIFOLDS
 Proyecciones Vol. 21, N o 1, pp. 21-50, May 2002. Universidad Católica del Norte Antofagasta - Chile SOME SPECIAL KLEINIAN GROUPS AND THEIR ORBIFOLDS RUBÉN HIDALGO Universidad Técnica Federico Santa María
Proyecciones Vol. 21, N o 1, pp. 21-50, May 2002. Universidad Católica del Norte Antofagasta - Chile SOME SPECIAL KLEINIAN GROUPS AND THEIR ORBIFOLDS RUBÉN HIDALGO Universidad Técnica Federico Santa María
Bott Periodicity and Clifford Algebras
 Bott Periodicity and Clifford Algebras Kyler Siegel November 27, 2012 Contents 1 Introduction 1 2 Clifford Algebras 3 3 Vector Fields on Spheres 6 4 Division Algebras 7 1 Introduction Recall for that a
Bott Periodicity and Clifford Algebras Kyler Siegel November 27, 2012 Contents 1 Introduction 1 2 Clifford Algebras 3 3 Vector Fields on Spheres 6 4 Division Algebras 7 1 Introduction Recall for that a
Tutorial 5 Clifford Algebra and so(n)
") Tutorial 5 Clifford Algebra and so(n) 1 Definition of Clifford Algebra A set of N Hermitian matrices γ 1, γ,..., γ N obeying the anti-commutator γ i, γ j } = δ ij I (1) is the basis for an algebra called
Tutorial 5 Clifford Algebra and so(n) 1 Definition of Clifford Algebra A set of N Hermitian matrices γ 1, γ,..., γ N obeying the anti-commutator γ i, γ j } = δ ij I (1) is the basis for an algebra called
The relationship between framed bordism and skew-framed bordism
 The relationship between framed bordism and sew-framed bordism Pyotr M. Ahmet ev and Peter J. Eccles Abstract A sew-framing of an immersion is an isomorphism between the normal bundle of the immersion
The relationship between framed bordism and sew-framed bordism Pyotr M. Ahmet ev and Peter J. Eccles Abstract A sew-framing of an immersion is an isomorphism between the normal bundle of the immersion
ABSTRACT ALGEBRA WITH APPLICATIONS
 ABSTRACT ALGEBRA WITH APPLICATIONS IN TWO VOLUMES VOLUME I VECTOR SPACES AND GROUPS KARLHEINZ SPINDLER Darmstadt, Germany Marcel Dekker, Inc. New York Basel Hong Kong Contents f Volume I Preface v VECTOR
ABSTRACT ALGEBRA WITH APPLICATIONS IN TWO VOLUMES VOLUME I VECTOR SPACES AND GROUPS KARLHEINZ SPINDLER Darmstadt, Germany Marcel Dekker, Inc. New York Basel Hong Kong Contents f Volume I Preface v VECTOR