The dynamics of the Forced Damped Pendulum. John Hubbard Cornell University and Université de Provence
|
|
|
- Lynn Rosanna Snow
- 5 years ago
- Views:
Transcription
1 The dynamics of the Forced Damped Pendulum John Hubbard Cornell University and Université de Provence
2 Three ways to view the pendulum
3 Three ways to view the pendulum 1. As a physical object
4 Three ways to view the pendulum 1. As a physical object If the bob is a magnet, an alternating electrical current through the axis creates an oscillating magnetic field which periodically excites the pendulum.
5 The forced damped pendulum is of central importance in engineering: It is the basic building block of every robot.
6 The forced damped pendulum is of central importance in engineering: It is the basic building block of every robot. Thus understanding the dynamics of the forced damped pendulum is absolutely fundamental: We will never understand robots if we don t understand that.
7 The forced damped pendulum is of central importance in engineering: It is the basic building block of every robot. Thus understanding the dynamics of the forced damped pendulum is absolutely fundamental: We will never understand robots if we don t understand that. As we will see, it is a lot more complicated than one might imagine.
8 mx = ax sin x + b cos ωt mass x acceleration = force In this case, the force has In mechanics, there is really only one law of motion: -ax 3 terms the friction ma=f. - sin x the force due to gravitation b cos wt the external force
9 2. As a differential equation mx = ax sin x + b cos ωt mass x acceleration = force In this case, the force has In mechanics, there is really only one law of motion: -ax 3 terms the friction ma=f. - sin x the force due to gravitation b cos wt the external force
10
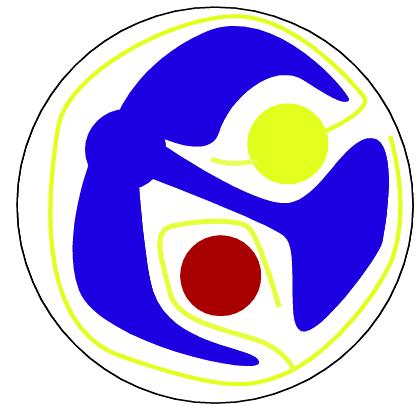
11 3. A Third representation of the dynamics of the pendulum is the following picture








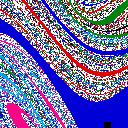




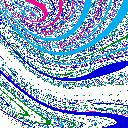
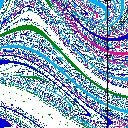


12 3. A Third representation of the dynamics of the pendulum is the following picture
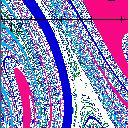
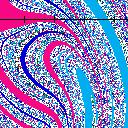
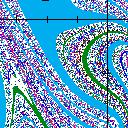
13 More precisely, the picture represents something about the pendulum represented by the differential equation x =.1x sin x + cos t A particular mass m=1 A particular friction coefficient a=.1 A particular forcing term b=1 have been chosen. If you modify the parameters, more specifically if you let b vary from.8 to 1.2, you get the following sequence of images.
14
15 The relation between the pendulum and the pictures To describe the relation, I will begin by describing the undamped, unforced pendulum, whose differential equation is x = sin x which we will write as the system x = y y = sin x
16 These trajectories go round and round these solutions oscillate These trajectories Text go round and round
17 We see three kinds of trajectories Oscillations around the stable equilibrium Trajectories which go round and round clockwise Trajectories which go round and round counterclockwise These are separated by the separatrices: movements that take infinite time to fall from the unstable upward equilibrium, pass through the downward position, and then take infinite time to climb back the the unstable upward position.
18 We see three kinds of trajectories Oscillations around the stable equilibrium Trajectories which go round and round clockwise Trajectories which go round and round counterclockwise These are separated by the separatrices: movements that take infinite time to fall from the unstable upward equilibrium, pass through the downward position, and then take infinite time to climb back the the unstable upward position. Now let us turn on a bit of friction
19
20 Now most trajectories are attracted to the downward position. But there are exceptional movements, still called separatrices, which instead take infinite time to approach the unstable upward position. These separate the movements that don t quite make it to the top from those that just make it over.
21 Now most trajectories are attracted to the downward position. But there are exceptional movements, still called separatrices, which instead take infinite time to approach the unstable upward position. These separate the movements that don t quite make it to the top from those that just make it over. Now let us turn on a bit of forcing
22 What makes the difference between these representations of the stable periodic motion Start at time t = 0 with initial position and velocity [ ] x(0) x (0). Then you will undergo a motion [ x(t) ] x (t), which will quite likely be attracted to the stable periodic motion. Which motion you are attracted to depends on how many times you go over the top before settling down
23 As we can see, it is a lot more complicated. Still, there is a pattern of sorts: After a random-looking initial walk, trajectories (some of them at least) appear to settle down to a stable periodic motion There is really only one stable periodic motion, which we see infinitely many times as., x(t) 4π, x(t) 2π, x(t), x(t) + 2π, x(t) +
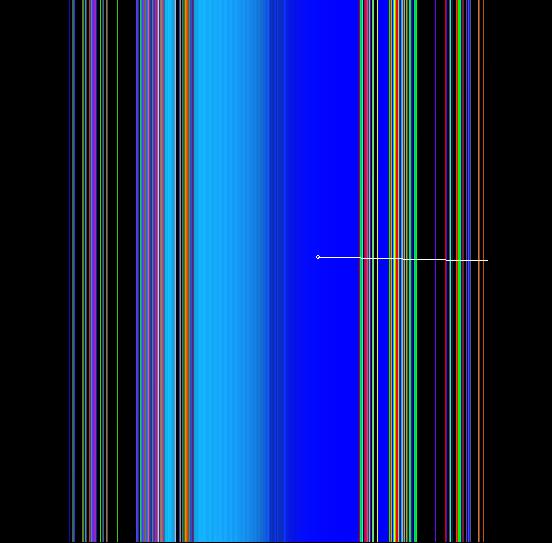
24 This point is colored blue because it is attracted to the blue cycle This point is colored red the red cycle because it is attracted to
25 Thus we can color the plane of initial positions and velocities which according to representation of the stable periodic motion attracts the trajectory with those initial conditions That is what the pictures represent.
26 These pictures are complicated How do we go about understanding them? I am going to state two results about these pictures. They do not amount to a description But they both say that The forced damped pendulum is
27 These pictures are complicated How do we go about understanding them? I am going to state two results about these pictures. They do not amount to a description But they both say that The forced damped pendulum is chaotic
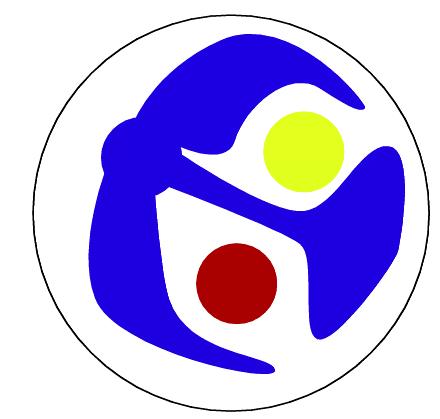
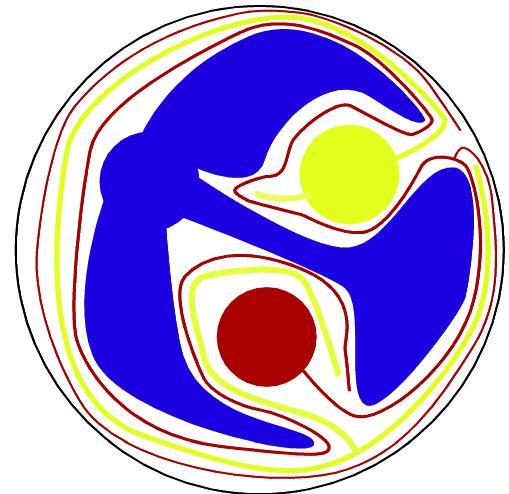
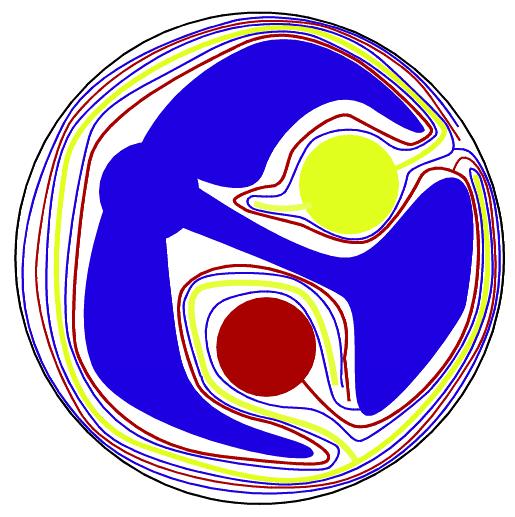
28 Lakes of Wada The basins of the attracting basins have the Wada property: Every point in the boundary of one basin is in the boundary of every other

29 Unless you are pretty tricky, 3 lakes will only have 2 triple points But Yoneyama found a way to have many more
30 On an island lived three philanthropists each owns a lake
31 The philanthropist with the blue lake goes to work
32 The philanthropist with the yellow lake goes to work
33 The philanthropist with the red lake goes to work
34 The philanthropist with the blue lake goes back to work
35 The lakes just get bigger and bigger, but at no time do two lakes touch. At the end of all the digging, the inhabitants don t have much dry land but they can reach arbitrarily little and get the beverage of their choice. If you sit on the edge of one of the lakes, you will see many streams of the other lakes nearly. This is what the pendulum pictures look like!

36 View from the yellow lake
37 Saying that the basins of the attracting motions have the Wada property is certainly a way of saying that the motions are chaotic: By an arbitrarily small perturbation of the initial condition, you can make the pendulum go anywhere. The second theorem also says that the motions are chaotic
38 Prescribing dynamics The pendulum has a natural unit of time, which is the period of the forcing term 2π with the units I chose. Let I k = {t 2kπ t < 2(k + 1)π} During one unit of time, the pendulum may do one of 4 things
39 Possible behaviors
40 Possible behaviors Cross the downward position once clockwise 1
41 Possible behaviors Cross the downward position once clockwise 1 Cross the downward position once counterclockwise -1
42 Possible behaviors Cross the downward position once clockwise 1 Cross the downward position once counterclockwise -1 Not cross the downward position 0
43 Possible behaviors Cross the downward position once clockwise 1 Cross the downward position once counterclockwise -1 Not cross the downward position 0 None of the above, for instance cross the NA downward position twice
44 For every biinfinite sequence..., s 2, s 1, s 0, s 1, s 2,... of symbols -1,0,1, there exists an initial position such that the corresponding motion x(0) x (0) x(t) x (t) will do s k during I k
45 Is this of any interest? If you think about it, you will see that the initial conditions leading to the prescribed motions of the previous theorem would have to be known with enormous precision if they are to realize even a small number of symbols. Thus the initial conditions described by the theorem are impossible to calculate, and even more difficult to set up in practice. Is the theorem therefore useless?
46 Just the opposite: is the flip side of
47 Just the opposite: Chaos is the flip side of
48 Just the opposite: Chaos is the flip side of Control
49 One consequence of the theorem is that modifying the forcing term f = b(t) cos ω 0 t, with b(t) b 0 arbitrarily small amplitude modulation am f = b 0 cos ω(t)t, with ω(t) ω 0 arbitrarily small frequency modulation fm You can make the pendulum do anything you want: You can control the pendulum with arbitrarily small cost.
50
51 that s all folks
52 that s all folks!
A plane autonomous system is a pair of simultaneous first-order differential equations,
 Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
Chapter 11 Phase-Plane Techniques 11.1 Plane Autonomous Systems A plane autonomous system is a pair of simultaneous first-order differential equations, ẋ = f(x, y), ẏ = g(x, y). This system has an equilibrium
How to work out really complicated motion. Iteration and Problem Solving Strategies. Let s go. Vertical spring-mass.
 Iteration and Problem Solving Strategies How to solve anything! How to work out really complicated motion Break it up into little tiny steps. Use an approximate method for each step. Add them all up. Vertical
Iteration and Problem Solving Strategies How to solve anything! How to work out really complicated motion Break it up into little tiny steps. Use an approximate method for each step. Add them all up. Vertical
The Forced Damped Pendulum: Chaos, Complication and Control.
 1 The Forced Damped Pendulum: Chaos, Complication and Control. John H. Hubbard We show that a simple differential equation modeling a garden-variety damped forced pendulum can ehibit etraordinarily complicated
1 The Forced Damped Pendulum: Chaos, Complication and Control. John H. Hubbard We show that a simple differential equation modeling a garden-variety damped forced pendulum can ehibit etraordinarily complicated
Nonlinear Oscillators: Free Response
 20 Nonlinear Oscillators: Free Response Tools Used in Lab 20 Pendulums To the Instructor: This lab is just an introduction to the nonlinear phase portraits, but the connection between phase portraits and
20 Nonlinear Oscillators: Free Response Tools Used in Lab 20 Pendulums To the Instructor: This lab is just an introduction to the nonlinear phase portraits, but the connection between phase portraits and
PH 120 Project # 2: Pendulum and chaos
 PH 120 Project # 2: Pendulum and chaos Due: Friday, January 16, 2004 In PH109, you studied a simple pendulum, which is an effectively massless rod of length l that is fixed at one end with a small mass
PH 120 Project # 2: Pendulum and chaos Due: Friday, January 16, 2004 In PH109, you studied a simple pendulum, which is an effectively massless rod of length l that is fixed at one end with a small mass
Chapter 1 Review of Equations and Inequalities
 Chapter 1 Review of Equations and Inequalities Part I Review of Basic Equations Recall that an equation is an expression with an equal sign in the middle. Also recall that, if a question asks you to solve
Chapter 1 Review of Equations and Inequalities Part I Review of Basic Equations Recall that an equation is an expression with an equal sign in the middle. Also recall that, if a question asks you to solve
MITOCW MIT8_01F16_w02s05v06_360p
 MITOCW MIT8_01F16_w02s05v06_360p One of our classic problems to analyze using Newton's second law is the motion of two blocks with a rope that's wrapped around a pulley. So imagine we have a pulley, P,
MITOCW MIT8_01F16_w02s05v06_360p One of our classic problems to analyze using Newton's second law is the motion of two blocks with a rope that's wrapped around a pulley. So imagine we have a pulley, P,
Answers to selected problems from Essential Physics, Chapter 10
 Answers to selected problems from Essential Physics, Chapter 10 1. (a) The red ones have the same speed as one another. The blue ones also have the same speed as one another, with a value twice the speed
Answers to selected problems from Essential Physics, Chapter 10 1. (a) The red ones have the same speed as one another. The blue ones also have the same speed as one another, with a value twice the speed
Oscillations. PHYS 101 Previous Exam Problems CHAPTER. Simple harmonic motion Mass-spring system Energy in SHM Pendulums
 PHYS 101 Previous Exam Problems CHAPTER 15 Oscillations Simple harmonic motion Mass-spring system Energy in SHM Pendulums 1. The displacement of a particle oscillating along the x axis is given as a function
PHYS 101 Previous Exam Problems CHAPTER 15 Oscillations Simple harmonic motion Mass-spring system Energy in SHM Pendulums 1. The displacement of a particle oscillating along the x axis is given as a function
Nonlinear Autonomous Systems of Differential
 Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Chapter 4 Nonlinear Autonomous Systems of Differential Equations 4.0 The Phase Plane: Linear Systems 4.0.1 Introduction Consider a system of the form x = A(x), (4.0.1) where A is independent of t. Such
Figure 1: Doing work on a block by pushing it across the floor.
 Work Let s imagine I have a block which I m pushing across the floor, shown in Figure 1. If I m moving the block at constant velocity, then I know that I have to apply a force to compensate the effects
Work Let s imagine I have a block which I m pushing across the floor, shown in Figure 1. If I m moving the block at constant velocity, then I know that I have to apply a force to compensate the effects
Thursday, August 4, 2011
 Chapter 16 Thursday, August 4, 2011 16.1 Springs in Motion: Hooke s Law and the Second-Order ODE We have seen alrealdy that differential equations are powerful tools for understanding mechanics and electro-magnetism.
Chapter 16 Thursday, August 4, 2011 16.1 Springs in Motion: Hooke s Law and the Second-Order ODE We have seen alrealdy that differential equations are powerful tools for understanding mechanics and electro-magnetism.
Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras
 Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture - 21 Central Potential and Central Force Ready now to take up the idea
Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture - 21 Central Potential and Central Force Ready now to take up the idea
Laboratory Instruction-Record Pages
 Laboratory Instruction-Record Pages The Driven Pendulum Geology 200 - Evolutionary Systems James Madison University Lynn S. Fichter and Steven J. Baedke Brief History of Swinging Many things in this universe
Laboratory Instruction-Record Pages The Driven Pendulum Geology 200 - Evolutionary Systems James Madison University Lynn S. Fichter and Steven J. Baedke Brief History of Swinging Many things in this universe
The Liapunov Method for Determining Stability (DRAFT)
") 44 The Liapunov Method for Determining Stability (DRAFT) 44.1 The Liapunov Method, Naively Developed In the last chapter, we discussed describing trajectories of a 2 2 autonomous system x = F(x) as level
44 The Liapunov Method for Determining Stability (DRAFT) 44.1 The Liapunov Method, Naively Developed In the last chapter, we discussed describing trajectories of a 2 2 autonomous system x = F(x) as level
Physics 101 Discussion Week 12 Explanation (2011)
") Physics 101 Discussion Week 12 Eplanation (2011) D12-1 Horizontal oscillation Q0. This is obviously about a harmonic oscillator. Can you write down Newton s second law in the (horizontal) direction? Let
Physics 101 Discussion Week 12 Eplanation (2011) D12-1 Horizontal oscillation Q0. This is obviously about a harmonic oscillator. Can you write down Newton s second law in the (horizontal) direction? Let
Making Sense of the Universe (Chapter 4) Why does the Earth go around the Sun? Part, but not all, of Chapter 4
 Why does the Earth go around the Sun? Part, but not all, of Chapter 4") Making Sense of the Universe (Chapter 4) Why does the Earth go around the Sun? Part, but not all, of Chapter 4 Based on part of Chapter 4 This material will be useful for understanding Chapters 8 and 11
Making Sense of the Universe (Chapter 4) Why does the Earth go around the Sun? Part, but not all, of Chapter 4 Based on part of Chapter 4 This material will be useful for understanding Chapters 8 and 11
Vibratory Motion -- Conceptual Solutions
 Vibratory Motion Vibratory Motion -- Conceptual Solutions 1.) An ideal spring attached to a mass m =.3 kg provides a force equal to -kx, where k = 47.33 nt/m is the spring's spring constant and x denotes
Vibratory Motion Vibratory Motion -- Conceptual Solutions 1.) An ideal spring attached to a mass m =.3 kg provides a force equal to -kx, where k = 47.33 nt/m is the spring's spring constant and x denotes
1. [30] Y&F a) Assuming a small angle displacement θ max < 0.1 rad, the period is very nearly
![1. [30] Y&F a) Assuming a small angle displacement θ max < 0.1 rad, the period is very nearly](/thumbs/84/89548463.jpg "1. [30] Y&F a) Assuming a small angle displacement θ max < 0.1 rad, the period is very nearly") PH1140 D09 Homework 3 Solution 1. [30] Y&F 13.48. a) Assuming a small angle displacement θ max < 0.1 rad, the period is very nearly T = π L =.84 s. g b) For the displacement θ max = 30 = 0.54 rad we use
PH1140 D09 Homework 3 Solution 1. [30] Y&F 13.48. a) Assuming a small angle displacement θ max < 0.1 rad, the period is very nearly T = π L =.84 s. g b) For the displacement θ max = 30 = 0.54 rad we use
How Do Objects Move? Describing Motion. Different Kinds of Motion
 How Do Objects Move? Describing Motion Different Kinds of Motion Motion is everywhere. The planets are in motion around the Sun. Cars are in motion as they are driven down the street. There s even motion
How Do Objects Move? Describing Motion Different Kinds of Motion Motion is everywhere. The planets are in motion around the Sun. Cars are in motion as they are driven down the street. There s even motion
PHYSICS 107. Lecture 8 Conservation Laws. For every action there is an equal and opposite reaction.
 PHYSICS 107 Lecture 8 Conservation Laws Newton s Third Law This is usually stated as: For every action there is an equal and opposite reaction. However in this form it's a little vague. I prefer the form:
PHYSICS 107 Lecture 8 Conservation Laws Newton s Third Law This is usually stated as: For every action there is an equal and opposite reaction. However in this form it's a little vague. I prefer the form:
The phenomenon: complex motion, unusual geometry
 Part I The phenomenon: complex motion, unusual geometry Chapter 1 Chaotic motion 1.1 What is chaos? Certain long-lasting, sustained motion repeats itself exactly, periodically. Examples from everyday life
Part I The phenomenon: complex motion, unusual geometry Chapter 1 Chaotic motion 1.1 What is chaos? Certain long-lasting, sustained motion repeats itself exactly, periodically. Examples from everyday life
F = ma, F R + F S = mx.
 Mechanical Vibrations As we mentioned in Section 3.1, linear equations with constant coefficients come up in many applications; in this section, we will specifically study spring and shock absorber systems
Mechanical Vibrations As we mentioned in Section 3.1, linear equations with constant coefficients come up in many applications; in this section, we will specifically study spring and shock absorber systems
Resonance and response
 Chapter 2 Resonance and response Last updated September 20, 2008 In this section of the course we begin with a very simple system a mass hanging from a spring and see how some remarkable ideas emerge.
Chapter 2 Resonance and response Last updated September 20, 2008 In this section of the course we begin with a very simple system a mass hanging from a spring and see how some remarkable ideas emerge.
Math 312 Lecture Notes Linear Two-dimensional Systems of Differential Equations
 Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Measuring the Universal Gravitational Constant, G
 Measuring the Universal Gravitational Constant, G Introduction: The universal law of gravitation states that everything in the universe is attracted to everything else. It seems reasonable that everything
Measuring the Universal Gravitational Constant, G Introduction: The universal law of gravitation states that everything in the universe is attracted to everything else. It seems reasonable that everything
Physics. Chapter 9 Gravity
 Physics Chapter 9 Gravity The Newtonian Synthesis Gravity is a Universal Force The Newtonian Synthesis According to legend, Newton discovered gravity while sitting under an apple tree. The Falling Moon
Physics Chapter 9 Gravity The Newtonian Synthesis Gravity is a Universal Force The Newtonian Synthesis According to legend, Newton discovered gravity while sitting under an apple tree. The Falling Moon
Chapter 3: Second Order ODE 3.8 Elements of Particle Dy
 Chapter 3: Second Order ODE 3.8 Elements of Particle Dynamics 3 March 2018 Objective The objective of this section is to explain that any second degree linear ODE represents the motion of a particle. This
Chapter 3: Second Order ODE 3.8 Elements of Particle Dynamics 3 March 2018 Objective The objective of this section is to explain that any second degree linear ODE represents the motion of a particle. This
Theoretical physics. Deterministic chaos in classical physics. Martin Scholtz
 Theoretical physics Deterministic chaos in classical physics Martin Scholtz scholtzzz@gmail.com Fundamental physical theories and role of classical mechanics. Intuitive characteristics of chaos. Newton
Theoretical physics Deterministic chaos in classical physics Martin Scholtz scholtzzz@gmail.com Fundamental physical theories and role of classical mechanics. Intuitive characteristics of chaos. Newton
From Last Time. Gravitational forces are apparent at a wide range of scales. Obeys
 From Last Time Gravitational forces are apparent at a wide range of scales. Obeys F gravity (Mass of object 1) (Mass of object 2) square of distance between them F = 6.7 10-11 m 1 m 2 d 2 Gravitational
From Last Time Gravitational forces are apparent at a wide range of scales. Obeys F gravity (Mass of object 1) (Mass of object 2) square of distance between them F = 6.7 10-11 m 1 m 2 d 2 Gravitational
Nonlinear dynamics & chaos BECS
 Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Nonlinear dynamics & chaos BECS-114.7151 Phase portraits Focus: nonlinear systems in two dimensions General form of a vector field on the phase plane: Vector notation: Phase portraits Solution x(t) describes
Mass on a Horizontal Spring
 Course- B.Sc. Applied Physical Science (Computer Science) Year- IInd, Sem- IVth Subject Physics Paper- XIVth, Electromagnetic Theory Lecture No. 22, Simple Harmonic Motion Introduction Hello friends in
Course- B.Sc. Applied Physical Science (Computer Science) Year- IInd, Sem- IVth Subject Physics Paper- XIVth, Electromagnetic Theory Lecture No. 22, Simple Harmonic Motion Introduction Hello friends in
Dynamics. What You Will Learn. Introduction. Relating Position, Velocity, Acceleration and Time. Examples
 Dynamics What You Will Learn How to relate position, velocity, acceleration and time. How to relate force and motion. Introduction The study of dynamics is the study of motion, including the speed and
Dynamics What You Will Learn How to relate position, velocity, acceleration and time. How to relate force and motion. Introduction The study of dynamics is the study of motion, including the speed and
Magnetism and Gravity
 Imagine that you had two superpowers. Both powers allow you to move things without touching them. You can even move things located on the other side of a wall! One power is the ability to pull anything
Imagine that you had two superpowers. Both powers allow you to move things without touching them. You can even move things located on the other side of a wall! One power is the ability to pull anything
Circular Motion Concept Questions
 Circular Motion Concept Questions Question 1 A bead is given a small push at the top of a hoop (position A) and is constrained to slide around a frictionless circular wire (in a vertical plane). Circle
Circular Motion Concept Questions Question 1 A bead is given a small push at the top of a hoop (position A) and is constrained to slide around a frictionless circular wire (in a vertical plane). Circle
Unit 1: Equilibrium and Center of Mass
 Unit 1: Equilibrium and Center of Mass FORCES What is a force? Forces are a result of the interaction between two objects. They push things, pull things, keep things together, pull things apart. It s really
Unit 1: Equilibrium and Center of Mass FORCES What is a force? Forces are a result of the interaction between two objects. They push things, pull things, keep things together, pull things apart. It s really
KIRCHHOFF S LAWS. Learn how to analyze more complicated circuits with more than one voltage source and numerous resistors.
 KIRCHHOFF S LAWS Lab Goals: Learn how to analyze more complicated circuits with more than one voltage source and numerous resistors. Lab Notebooks: Write descriptions of all of your experiments in your
KIRCHHOFF S LAWS Lab Goals: Learn how to analyze more complicated circuits with more than one voltage source and numerous resistors. Lab Notebooks: Write descriptions of all of your experiments in your
Chapter 15+ Revisit Oscillations and Simple Harmonic Motion
 Chapter 15+ Revisit Oscillations and Simple Harmonic Motion Revisit: Oscillations Simple harmonic motion To-Do: Pendulum oscillations Derive the parallel axis theorem for moments of inertia and apply it
Chapter 15+ Revisit Oscillations and Simple Harmonic Motion Revisit: Oscillations Simple harmonic motion To-Do: Pendulum oscillations Derive the parallel axis theorem for moments of inertia and apply it
4.1 KINEMATICS OF SIMPLE HARMONIC MOTION 4.2 ENERGY CHANGES DURING SIMPLE HARMONIC MOTION 4.3 FORCED OSCILLATIONS AND RESONANCE Notes
 4.1 KINEMATICS OF SIMPLE HARMONIC MOTION 4.2 ENERGY CHANGES DURING SIMPLE HARMONIC MOTION 4.3 FORCED OSCILLATIONS AND RESONANCE Notes I. DEFINING TERMS A. HOW ARE OSCILLATIONS RELATED TO WAVES? II. EQUATIONS
4.1 KINEMATICS OF SIMPLE HARMONIC MOTION 4.2 ENERGY CHANGES DURING SIMPLE HARMONIC MOTION 4.3 FORCED OSCILLATIONS AND RESONANCE Notes I. DEFINING TERMS A. HOW ARE OSCILLATIONS RELATED TO WAVES? II. EQUATIONS
Physics 6010, Fall Relevant Sections in Text: Introduction
 Physics 6010, Fall 2016 Introduction. Configuration space. Equations of Motion. Velocity Phase Space. Relevant Sections in Text: 1.1 1.4 Introduction This course principally deals with the variational
Physics 6010, Fall 2016 Introduction. Configuration space. Equations of Motion. Velocity Phase Space. Relevant Sections in Text: 1.1 1.4 Introduction This course principally deals with the variational
Physics 12 Unit 2: Vector Dynamics
 1 Physics 12 Unit 2: Vector Dynamics In this unit you will extend your study of forces. In particular, we will examine force as a vector quantity; this will involve solving problems where forces must be
1 Physics 12 Unit 2: Vector Dynamics In this unit you will extend your study of forces. In particular, we will examine force as a vector quantity; this will involve solving problems where forces must be
1 The pendulum equation
 Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
Math 270 Honors ODE I Fall, 2008 Class notes # 5 A longer than usual homework assignment is at the end. The pendulum equation We now come to a particularly important example, the equation for an oscillating
5. Forces and Free-Body Diagrams
 5. Forces and Free-Body Diagrams A) Overview We will begin by introducing the bulk of the new forces we will use in this course. We will start with the weight of an object, the gravitational force near
5. Forces and Free-Body Diagrams A) Overview We will begin by introducing the bulk of the new forces we will use in this course. We will start with the weight of an object, the gravitational force near
2 = = 0 Thus, the number which is largest in magnitude is equal to the number which is smallest in magnitude.
 Limits at Infinity Two additional topics of interest with its are its as x ± and its where f(x) ±. Before we can properly discuss the notion of infinite its, we will need to begin with a discussion on
Limits at Infinity Two additional topics of interest with its are its as x ± and its where f(x) ±. Before we can properly discuss the notion of infinite its, we will need to begin with a discussion on
Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras
 Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture 05 The Fundamental Forces of Nature In this lecture, we will discuss the
Mechanics, Heat, Oscillations and Waves Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture 05 The Fundamental Forces of Nature In this lecture, we will discuss the
Figure 1: Schematic of ship in still water showing the action of bouyancy and weight to right the ship.
 MULTI-DIMENSIONAL SYSTEM: In this computer simulation we will explore a nonlinear multi-dimensional system. As before these systems are governed by equations of the form x 1 = f 1 x 2 = f 2.. x n = f n
MULTI-DIMENSIONAL SYSTEM: In this computer simulation we will explore a nonlinear multi-dimensional system. As before these systems are governed by equations of the form x 1 = f 1 x 2 = f 2.. x n = f n
Math Assignment 5
 Math 2280 - Assignment 5 Dylan Zwick Fall 2013 Section 3.4-1, 5, 18, 21 Section 3.5-1, 11, 23, 28, 35, 47, 56 Section 3.6-1, 2, 9, 17, 24 1 Section 3.4 - Mechanical Vibrations 3.4.1 - Determine the period
Math 2280 - Assignment 5 Dylan Zwick Fall 2013 Section 3.4-1, 5, 18, 21 Section 3.5-1, 11, 23, 28, 35, 47, 56 Section 3.6-1, 2, 9, 17, 24 1 Section 3.4 - Mechanical Vibrations 3.4.1 - Determine the period
ME8230 Nonlinear Dynamics
 ME8230 Nonlinear Dynamics Lecture 1, part 1 Introduction, some basic math background, and some random examples Prof. Manoj Srinivasan Mechanical and Aerospace Engineering srinivasan.88@osu.edu Spring mass
ME8230 Nonlinear Dynamics Lecture 1, part 1 Introduction, some basic math background, and some random examples Prof. Manoj Srinivasan Mechanical and Aerospace Engineering srinivasan.88@osu.edu Spring mass
Topic 5 Notes Jeremy Orloff. 5 Homogeneous, linear, constant coefficient differential equations
 Topic 5 Notes Jeremy Orloff 5 Homogeneous, linear, constant coefficient differential equations 5.1 Goals 1. Be able to solve homogeneous constant coefficient linear differential equations using the method
Topic 5 Notes Jeremy Orloff 5 Homogeneous, linear, constant coefficient differential equations 5.1 Goals 1. Be able to solve homogeneous constant coefficient linear differential equations using the method
1 Oscillations MEI Conference 2009
 1 Oscillations MEI Conference 2009 Some Background Information There is a film clip you can get from Youtube of the Tacoma Narrows Bridge called Galloping Gertie. This shows vibrations in the bridge increasing
1 Oscillations MEI Conference 2009 Some Background Information There is a film clip you can get from Youtube of the Tacoma Narrows Bridge called Galloping Gertie. This shows vibrations in the bridge increasing
DYNAMICAL SYSTEMS
 0.42 DYNAMICAL SYSTEMS Week Lecture Notes. What is a dynamical system? Probably the best way to begin this discussion is with arguably a most general and yet least helpful statement: Definition. A dynamical
0.42 DYNAMICAL SYSTEMS Week Lecture Notes. What is a dynamical system? Probably the best way to begin this discussion is with arguably a most general and yet least helpful statement: Definition. A dynamical
You may use your books and notes. Moreover, you are encouraged to freely discuss the questions..which doesn't mean copying answers.
 Section: Oscillations Take-Home Test You may use your books and notes. Moreover, you are encouraged to freely discuss the questions..which doesn't mean copying answers. 1. In simple harmonic motion, the
Section: Oscillations Take-Home Test You may use your books and notes. Moreover, you are encouraged to freely discuss the questions..which doesn't mean copying answers. 1. In simple harmonic motion, the
CHAPTER 6 VECTOR CALCULUS. We ve spent a lot of time so far just looking at all the different ways you can graph
 CHAPTER 6 VECTOR CALCULUS We ve spent a lot of time so far just looking at all the different ways you can graph things and describe things in three dimensions, and it certainly seems like there is a lot
CHAPTER 6 VECTOR CALCULUS We ve spent a lot of time so far just looking at all the different ways you can graph things and describe things in three dimensions, and it certainly seems like there is a lot
MITOCW 2. Harmonic Oscillators with Damping
 MITOCW 2. Harmonic Oscillators with Damping The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources
MITOCW 2. Harmonic Oscillators with Damping The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources
APPM 2460 CHAOTIC DYNAMICS
 APPM 2460 CHAOTIC DYNAMICS 1. Introduction Today we ll continue our exploration of dynamical systems, focusing in particular upon systems who exhibit a type of strange behavior known as chaos. We will
APPM 2460 CHAOTIC DYNAMICS 1. Introduction Today we ll continue our exploration of dynamical systems, focusing in particular upon systems who exhibit a type of strange behavior known as chaos. We will
0.1 Infinite Limits 2 = (2 1) =. Finally, we conclude that
 =. Finally, we conclude that") 0. Infinite Limits The concept of infinity (or symbolically, ) plays an important role in calculus. This concept is related to the boundedness of a function. Definition 0.. (Bounded Function). A function
0. Infinite Limits The concept of infinity (or symbolically, ) plays an important role in calculus. This concept is related to the boundedness of a function. Definition 0.. (Bounded Function). A function
ENGI Duffing s Equation Page 4.65
 ENGI 940 4. - Duffing s Equation Page 4.65 4. Duffing s Equation Among the simplest models of damped non-linear forced oscillations of a mechanical or electrical system with a cubic stiffness term is Duffing
ENGI 940 4. - Duffing s Equation Page 4.65 4. Duffing s Equation Among the simplest models of damped non-linear forced oscillations of a mechanical or electrical system with a cubic stiffness term is Duffing
Important because SHM is a good model to describe vibrations of a guitar string, vibrations of atoms in molecules, etc.
 Simple Harmonic Motion Oscillatory motion under a restoring force proportional to the amount of displacement from equilibrium A restoring force is a force that tries to move the system back to equilibrium
Simple Harmonic Motion Oscillatory motion under a restoring force proportional to the amount of displacement from equilibrium A restoring force is a force that tries to move the system back to equilibrium
Chapter 4 Force and Motion
 Chapter 4 Force and Motion Units of Chapter 4 The Concepts of Force and Net Force Inertia and Newton s First Law of Motion Newton s Second Law of Motion Newton s Third Law of Motion More on Newton s Laws:
Chapter 4 Force and Motion Units of Chapter 4 The Concepts of Force and Net Force Inertia and Newton s First Law of Motion Newton s Second Law of Motion Newton s Third Law of Motion More on Newton s Laws:
Concept Questions with Answers. Concept Questions with Answers W11D2. Concept Questions Review
 Concept Questions with W11D2 Concept Questions Review W11D2 2 Concept Questions with W7D1 W07D1 Magnetic Dipoles, Force and Torque on a Dipole, Experiment 2 W07D1 Magnetic Dipoles, Torque and Force on
Concept Questions with W11D2 Concept Questions Review W11D2 2 Concept Questions with W7D1 W07D1 Magnetic Dipoles, Force and Torque on a Dipole, Experiment 2 W07D1 Magnetic Dipoles, Torque and Force on
Unit 3: Gravitational, Electric and Magnetic Fields Unit Test
 Unit 3: Gravitational, Electric and Magnetic Fields Unit Test Name: Knowledge & Understanding Application Thinking & Inquiry Communication Total 15 18 5 6 44 Part 1: Multiple Choice 1. Two charged spheres
Unit 3: Gravitational, Electric and Magnetic Fields Unit Test Name: Knowledge & Understanding Application Thinking & Inquiry Communication Total 15 18 5 6 44 Part 1: Multiple Choice 1. Two charged spheres
University of Alabama Department of Physics and Astronomy. Problem Set 4
 University of Alabama Department of Physics and Astronomy PH 26 LeClair Fall 20 Problem Set 4. A battery has an ideal voltage V and an internal resistance r. A variable load resistance R is connected to
University of Alabama Department of Physics and Astronomy PH 26 LeClair Fall 20 Problem Set 4. A battery has an ideal voltage V and an internal resistance r. A variable load resistance R is connected to
Ph211 Summer 09 HW #4, week of 07/13 07/16. Ch6: 44, 46, 52; Ch7: 29, 41. (Knight, 2nd Ed).
.") Solutions 1 for HW #4: Ch6: 44, 46, 52; Ch7: 29, 41. (Knight, 2nd Ed). We make use of: equations of kinematics, and Newton s Laws. You also (routinely) need to handle components of a vector, in nearly
Solutions 1 for HW #4: Ch6: 44, 46, 52; Ch7: 29, 41. (Knight, 2nd Ed). We make use of: equations of kinematics, and Newton s Laws. You also (routinely) need to handle components of a vector, in nearly
A tricky node-voltage situation
 A tricky node-voltage situation The node-method will always work you can always generate enough equations to determine all of the node voltages. The prescribed method quite well, but there is one situation
A tricky node-voltage situation The node-method will always work you can always generate enough equations to determine all of the node voltages. The prescribed method quite well, but there is one situation
Project 3: Pendulum. Physics 2300 Spring 2018 Lab partner
 Physics 2300 Spring 2018 Name Lab partner Project 3: Pendulum In this project you will explore the behavior of a pendulum. There is no better example of a system that seems simple at first but turns out
Physics 2300 Spring 2018 Name Lab partner Project 3: Pendulum In this project you will explore the behavior of a pendulum. There is no better example of a system that seems simple at first but turns out
Copyright (c) 2006 Warren Weckesser
 2006 Warren Weckesser") 2.2. PLANAR LINEAR SYSTEMS 3 2.2. Planar Linear Systems We consider the linear system of two first order differential equations or equivalently, = ax + by (2.7) dy = cx + dy [ d x x = A x, where x =, and
2.2. PLANAR LINEAR SYSTEMS 3 2.2. Planar Linear Systems We consider the linear system of two first order differential equations or equivalently, = ax + by (2.7) dy = cx + dy [ d x x = A x, where x =, and
Lab 5: Rotational Motion II
 Lab 5: Rotational Motion II Written October-November 1986 by Nancy Bronder '86, Tom Budka '89, Bob Hamwey GS, D. Mook revised by Mook, K. Muenchinger '93 and E. Pleger '94 July-November 1991 and by Melissa
Lab 5: Rotational Motion II Written October-November 1986 by Nancy Bronder '86, Tom Budka '89, Bob Hamwey GS, D. Mook revised by Mook, K. Muenchinger '93 and E. Pleger '94 July-November 1991 and by Melissa
Notice that this is not just theory. Applying +5 F and -5 F in a point, has exactly the same effect as applying no force in this point at all.
 1 2 3 4 In this text is explained why our universe exists and why there are nature s laws. The explanation is given in two parts: Part 1: Why does our universe exist? Part 2: Why does nature s laws exist?
1 2 3 4 In this text is explained why our universe exists and why there are nature s laws. The explanation is given in two parts: Part 1: Why does our universe exist? Part 2: Why does nature s laws exist?
A non-turing-recognizable language
 CS 360: Introduction to the Theory of Computing John Watrous, University of Waterloo A non-turing-recognizable language 1 OVERVIEW Thus far in the course we have seen many examples of decidable languages
CS 360: Introduction to the Theory of Computing John Watrous, University of Waterloo A non-turing-recognizable language 1 OVERVIEW Thus far in the course we have seen many examples of decidable languages
The Big Picture. Discuss Examples of unpredictability. Odds, Stanisław Lem, The New Yorker (1974) Chaos, Scientific American (1986)
 Chaos, Scientific American (1986)") The Big Picture Discuss Examples of unpredictability Odds, Stanisław Lem, The New Yorker (1974) Chaos, Scientific American (1986) Lecture 2: Natural Computation & Self-Organization, Physics 256A (Winter
The Big Picture Discuss Examples of unpredictability Odds, Stanisław Lem, The New Yorker (1974) Chaos, Scientific American (1986) Lecture 2: Natural Computation & Self-Organization, Physics 256A (Winter
Physics Mechanics. Lecture 32 Oscillations II
 Physics 170 - Mechanics Lecture 32 Oscillations II Gravitational Potential Energy A plot of the gravitational potential energy U g looks like this: Energy Conservation Total mechanical energy of an object
Physics 170 - Mechanics Lecture 32 Oscillations II Gravitational Potential Energy A plot of the gravitational potential energy U g looks like this: Energy Conservation Total mechanical energy of an object
Consider a particle in 1D at position x(t), subject to a force F (x), so that mẍ = F (x). Define the kinetic energy to be.
, subject to a force F (x), so that mẍ = F (x). Define the kinetic energy to be.") Chapter 4 Energy and Stability 4.1 Energy in 1D Consider a particle in 1D at position x(t), subject to a force F (x), so that mẍ = F (x). Define the kinetic energy to be T = 1 2 mẋ2 and the potential energy
Chapter 4 Energy and Stability 4.1 Energy in 1D Consider a particle in 1D at position x(t), subject to a force F (x), so that mẍ = F (x). Define the kinetic energy to be T = 1 2 mẋ2 and the potential energy
Class 4: More Pendulum results
 Class 4: More Pendulum results The pendulum is a mechanical problem with a long and interesting history, from Galileo s first ansatz that the period was independent of the amplitude based on watching priests
Class 4: More Pendulum results The pendulum is a mechanical problem with a long and interesting history, from Galileo s first ansatz that the period was independent of the amplitude based on watching priests
The maximum kinetic energy is directly proportional to the frequency. The time for one oscillation is directly proportional to the frequency.
 Q1.For a body performing simple harmonic motion, which one of the following statements is correct? The maximum kinetic energy is directly proportional to the frequency. The time for one oscillation is
Q1.For a body performing simple harmonic motion, which one of the following statements is correct? The maximum kinetic energy is directly proportional to the frequency. The time for one oscillation is
ConcepTest PowerPoints
 ConcepTest PowerPoints Chapter 4 Physics: Principles with Applications, 6 th edition Giancoli 2005 Pearson Prentice Hall This work is protected by United States copyright laws and is provided solely for
ConcepTest PowerPoints Chapter 4 Physics: Principles with Applications, 6 th edition Giancoli 2005 Pearson Prentice Hall This work is protected by United States copyright laws and is provided solely for
Chapter 1. Harmonic Oscillator. 1.1 Energy Analysis
 Chapter 1 Harmonic Oscillator Figure 1.1 illustrates the prototypical harmonic oscillator, the mass-spring system. A mass is attached to one end of a spring. The other end of the spring is attached to
Chapter 1 Harmonic Oscillator Figure 1.1 illustrates the prototypical harmonic oscillator, the mass-spring system. A mass is attached to one end of a spring. The other end of the spring is attached to
LECTURE 8: DYNAMICAL SYSTEMS 7
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
Properties of Motion. Force. Examples of Forces. Basics terms and concepts. Isaac Newton
 Properties of Motion It took about 2500 years to different generations of philosophers, mathematicians and astronomers to understand Aristotle's theory of Natural Motion and Violent Motion: Falling bodies
Properties of Motion It took about 2500 years to different generations of philosophers, mathematicians and astronomers to understand Aristotle's theory of Natural Motion and Violent Motion: Falling bodies
Plasma Physics Prof. V. K. Tripathi Department of Physics Indian Institute of Technology, Delhi
 Plasma Physics Prof. V. K. Tripathi Department of Physics Indian Institute of Technology, Delhi Module No. # 01 Lecture No. # 22 Adiabatic Invariance of Magnetic Moment and Mirror Confinement Today, we
Plasma Physics Prof. V. K. Tripathi Department of Physics Indian Institute of Technology, Delhi Module No. # 01 Lecture No. # 22 Adiabatic Invariance of Magnetic Moment and Mirror Confinement Today, we
Math 266: Phase Plane Portrait
 Math 266: Phase Plane Portrait Long Jin Purdue, Spring 2018 Review: Phase line for an autonomous equation For a single autonomous equation y = f (y) we used a phase line to illustrate the equilibrium solutions
Math 266: Phase Plane Portrait Long Jin Purdue, Spring 2018 Review: Phase line for an autonomous equation For a single autonomous equation y = f (y) we used a phase line to illustrate the equilibrium solutions
MAS212 Assignment #2: The damped driven pendulum
 MAS Assignment #: The damped driven pendulum Sam Dolan (January 8 Introduction In this assignment we study the motion of a rigid pendulum of length l and mass m, shown in Fig., using both analytical and
MAS Assignment #: The damped driven pendulum Sam Dolan (January 8 Introduction In this assignment we study the motion of a rigid pendulum of length l and mass m, shown in Fig., using both analytical and
(Refer Slide Time: 0:21)
") Theory of Computation Prof. Somenath Biswas Department of Computer Science and Engineering Indian Institute of Technology Kanpur Lecture 7 A generalisation of pumping lemma, Non-deterministic finite automata
Theory of Computation Prof. Somenath Biswas Department of Computer Science and Engineering Indian Institute of Technology Kanpur Lecture 7 A generalisation of pumping lemma, Non-deterministic finite automata
Forces. Unit 2. Why are forces important? In this Unit, you will learn: Key words. Previously PHYSICS 219
 Previously Remember From Page 218 Forces are pushes and pulls that can move or squash objects. An object s speed is the distance it travels every second; if its speed increases, it is accelerating. Unit
Previously Remember From Page 218 Forces are pushes and pulls that can move or squash objects. An object s speed is the distance it travels every second; if its speed increases, it is accelerating. Unit
Special Classical Physical Systems
 Chapter 6 Special Classical Physical Systems 6.1 Introduction In order to understand the ideas of modern physics, it is essential to understand the operations of some special classical systems. Not only
Chapter 6 Special Classical Physical Systems 6.1 Introduction In order to understand the ideas of modern physics, it is essential to understand the operations of some special classical systems. Not only
Unforced Mechanical Vibrations
 Unforced Mechanical Vibrations Today we begin to consider applications of second order ordinary differential equations. 1. Spring-Mass Systems 2. Unforced Systems: Damped Motion 1 Spring-Mass Systems We
Unforced Mechanical Vibrations Today we begin to consider applications of second order ordinary differential equations. 1. Spring-Mass Systems 2. Unforced Systems: Damped Motion 1 Spring-Mass Systems We
Computational Physics (6810): Session 8
: Session 8") Computational Physics (6810): Session 8 Dick Furnstahl Nuclear Theory Group OSU Physics Department February 24, 2014 Differential equation solving Session 7 Preview Session 8 Stuff Solving differential
Computational Physics (6810): Session 8 Dick Furnstahl Nuclear Theory Group OSU Physics Department February 24, 2014 Differential equation solving Session 7 Preview Session 8 Stuff Solving differential
Worksheet #04 Newton s Laws of Motion & Free-Body-Diagram.
 Worksheet #04 1. Three identical blocks are pushed across a table at constant speed as shown below. The hand pushes horizontally. There is friction between the table and the bricks. We shall call the stack
Worksheet #04 1. Three identical blocks are pushed across a table at constant speed as shown below. The hand pushes horizontally. There is friction between the table and the bricks. We shall call the stack
Chapter 2 PARAMETRIC OSCILLATOR
 CHAPTER- Chapter PARAMETRIC OSCILLATOR.1 Introduction A simple pendulum consists of a mass m suspended from a string of length L which is fixed at a pivot P. When simple pendulum is displaced to an initial
CHAPTER- Chapter PARAMETRIC OSCILLATOR.1 Introduction A simple pendulum consists of a mass m suspended from a string of length L which is fixed at a pivot P. When simple pendulum is displaced to an initial
Lecture 11: Extrema. Nathan Pflueger. 2 October 2013
 Lecture 11: Extrema Nathan Pflueger 2 October 201 1 Introduction In this lecture we begin to consider the notion of extrema of functions on chosen intervals. This discussion will continue in the lectures
Lecture 11: Extrema Nathan Pflueger 2 October 201 1 Introduction In this lecture we begin to consider the notion of extrema of functions on chosen intervals. This discussion will continue in the lectures
Intermediate Physics PHYS102
 Intermediate Physics PHYS102 Dr Richard H. Cyburt Assistant Professor of Physics My office: 402c in the Science Building My phone: (304) 384-6006 My email: rcyburt@concord.edu My webpage: www.concord.edu/rcyburt
Intermediate Physics PHYS102 Dr Richard H. Cyburt Assistant Professor of Physics My office: 402c in the Science Building My phone: (304) 384-6006 My email: rcyburt@concord.edu My webpage: www.concord.edu/rcyburt
Chapter 4 Dynamics: Newton s Laws of Motion
 Chapter 4 Dynamics: Newton s Laws of Motion Force Newton s First Law of Motion Mass Newton s Second Law of Motion Newton s Third Law of Motion Weight the Force of Gravity; and the Normal Force Applications
Chapter 4 Dynamics: Newton s Laws of Motion Force Newton s First Law of Motion Mass Newton s Second Law of Motion Newton s Third Law of Motion Weight the Force of Gravity; and the Normal Force Applications
4. Complex Oscillations
 4. Complex Oscillations The most common use of complex numbers in physics is for analyzing oscillations and waves. We will illustrate this with a simple but crucially important model, the damped harmonic
4. Complex Oscillations The most common use of complex numbers in physics is for analyzing oscillations and waves. We will illustrate this with a simple but crucially important model, the damped harmonic
Physics 2211 A & B Quiz #2 Solutions Fall P sin θ = µ k P cos θ + mg
 Physics 2211 A & B Quiz #2 Solutions Fall 2016 I. (16 points) A block of mass m is sliding up a vertical wall at constant non-zero velocity v 0, due to an applied force P pushing against it at an angle
Physics 2211 A & B Quiz #2 Solutions Fall 2016 I. (16 points) A block of mass m is sliding up a vertical wall at constant non-zero velocity v 0, due to an applied force P pushing against it at an angle
week 8 The Magnetic Field
 week 8 The Magnetic Field General Principles General Principles Applications Start with magnetic forces on moving charges and currents A positive charge enters a uniform magnetic field as shown. What is
week 8 The Magnetic Field General Principles General Principles Applications Start with magnetic forces on moving charges and currents A positive charge enters a uniform magnetic field as shown. What is
Question 13.1a Harmonic Motion I
 Question 13.1a Harmonic Motion I A mass on a spring in SHM has a) 0 amplitude A and period T. What b) A/2 is the total distance traveled by c) A the mass after a time interval T? d) 2A e) 4A Question 13.1a
Question 13.1a Harmonic Motion I A mass on a spring in SHM has a) 0 amplitude A and period T. What b) A/2 is the total distance traveled by c) A the mass after a time interval T? d) 2A e) 4A Question 13.1a
LAB 10 - HARMONIC MOTION AND THE PENDULUM
 L10-1 Name Date Partners LAB 10 - HARMONIC MOION AND HE PENDULUM θ L Groove marking the center of mass Photogate s = 0 s F tan mg θ OVERVIEW Figure 1 A body is said to be in a position of stable equilibrium
L10-1 Name Date Partners LAB 10 - HARMONIC MOION AND HE PENDULUM θ L Groove marking the center of mass Photogate s = 0 s F tan mg θ OVERVIEW Figure 1 A body is said to be in a position of stable equilibrium
V. Graph Sketching and Max-Min Problems
 V. Graph Sketching and Max-Min Problems The signs of the first and second derivatives of a function tell us something about the shape of its graph. In this chapter we learn how to find that information.
V. Graph Sketching and Max-Min Problems The signs of the first and second derivatives of a function tell us something about the shape of its graph. In this chapter we learn how to find that information.
S13 PHY321: Final May 1, NOTE: Show all your work. No credit for unsupported answers. Turn the front page only when advised by the instructor!
 Name: Student ID: S13 PHY321: Final May 1, 2013 NOTE: Show all your work. No credit for unsupported answers. Turn the front page only when advised by the instructor! The exam consists of 6 problems (60
Name: Student ID: S13 PHY321: Final May 1, 2013 NOTE: Show all your work. No credit for unsupported answers. Turn the front page only when advised by the instructor! The exam consists of 6 problems (60
Hi, my name is Dr. Ann Weaver of Argosy University. This WebEx is about something in statistics called z-
 Hi, my name is Dr. Ann Weaver of Argosy University. This WebEx is about something in statistics called z- Scores. I have two purposes for this WebEx, one, I just want to show you how to use z-scores in
Hi, my name is Dr. Ann Weaver of Argosy University. This WebEx is about something in statistics called z- Scores. I have two purposes for this WebEx, one, I just want to show you how to use z-scores in
MITOCW ocw-18_02-f07-lec02_220k
 MITOCW ocw-18_02-f07-lec02_220k The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources for free.
MITOCW ocw-18_02-f07-lec02_220k The following content is provided under a Creative Commons license. Your support will help MIT OpenCourseWare continue to offer high quality educational resources for free.