Introduction to Model Order Reduction
|
|
|
- Madeleine Marshall
- 5 years ago
- Views:
Transcription
1 Introduction to Model Order Reduction Lecture 1: Introduction and overview Henrik Sandberg Kin Cheong Sou Automatic Control Lab, KTH ACCESS Specialized Course Graduate level Ht 2010, period 1 1
2 Overview of Today s Lecture What is model (order) reduction? Why is it important? What is included in the course? What is not included? Preliminary program What is expected from you? How to pass? Sign up for course 2
3 Model (Order) Reduction ~ hits in Google web.mit.edu/mor/, Many different research communities use different forms of model reduction: Fluid dynamics Mechanics Computational biology Circuit design Control theory Many heuristics available. More or less wellmotivated. In early 1980 s some optimal approaches were developed (using AAK-lemma) in control theory. Not much known for nonlinear systems. 3
4 The Big Picture Physical/Artificial System + Data Modeling Modeling ODEs Discretization PDEs Model reduction Reduced number of ODEs ODE = Ordinary Differential Equation PDE = Partial Differential Equation Simulation Control Analysis 4
5 An Incomplete Problem Formulation Given an ODE of order n Find another ODE of order r with essentially the same properties. Not enough information for problem to make complete sense, although this captures the essence of the model-order-reduction problem. 5
6 Problem 1: The standard problem Given: Find: Such that 6
7 Problem 1 (cont d) Choice of input u(t) determines what states are excited. Could also reflect initial conditions x(0). Choice of output y(t) determines what property of the states we want to preserve. - Choice of inputs and outputs essential! 7
8 Problem 1 (cont d) Misfit~bound(r) Complexity~r The function bound(r) quantifies (or bounds) the complexity-misfit trade-off 8
9 Problem 1 (cont d) Often the linear problem will be treated: 9
10 Problem 1 (cont d) A good model-reduction method gives us: 1. bound(r) To help us choose a suitable approximation order r; and 2. a reduced-order model (f r,g r ) alt. (A r,b r,c r,d r ). Such methods exist for some classes of models (typically linear). Many heuristics fail to provide bound(r). 10
11 Why Decrease the Order? (Why complexity(g)=n?) Simulation: Each evaluation of f(x(t,u(t))) is O(n 2 ) operations in linear case. Simulation: Data compression, roughly O(n 2 ) numbers to store a linear model. Control: Computation time of LQG controller is O(n 3 ) operations (solve the Riccati equation). Control: Optimal controller is at least of order n can be hard to implement. Analysis: Curse of dimensionality. Problem complexity often exponential in number of equations (=order). 11
12 Why Define Misfit This Way? - Misfit is a measure of the worst-case error of the approximation. Can be pessimistic Other measures are possible, statistical for example. Worst-case error often good for control theory (robust control theory). Simple expressions of bound(r) are available for worst-case errors, but not for statistical error measures. 12
13 O(n 3 ) operations n ~ Provable stability, bound(r) exist Classification of Methods Focus of course O(r 2 n) operations n ~ 10 6 Not provable stability, bound(r) does not exist [Figure from Antoulas: Approximation of Large-Scale Dynamical Systems] 13



14 Example 1: Image compression (complexity ~ rank) 14
15 Example 2: Chemical Reactions Model reduction of a diesel exhaust catalyst from [Sandberg, 2006]. 15
")

16 Example 2 (cont d) Complexity-misfit trade-off 16
17 Example 2 (Cont d) Verification using r=1 and r=2 17
![Explanation Kalman decomposition: [Figure from Åström: Reglerteori] Only S os contribute to the mapping u(t) y(t).](/docs-images/80/81995308/images/18-2.jpg "Also, states in S os do not contribute equally.")
18 Explanation Kalman decomposition: [Figure from Åström: Reglerteori] Only S os contribute to the mapping u(t) y(t). Also, states in S os do not contribute equally. G r = S os is one obvious reduced model candidate, but we can often do much better! 18



19 Problem 2: Model Reduction with Structure Constraints States in the model G are physically constrained to certain blocks, for example. Example: G 1 is a plant. G 2 is a controller. 19
![Example 3: Networked Control Example from [Sandberg and Murray, 2007]. K is a decentralized controller of P.](/docs-images/80/81995308/images/20-2.jpg "G models P s interaction with the surrounding environment. G r is a local environment model, to be added to controller K.")
20 Example 3: Networked Control Example from [Sandberg and Murray, 2007]. K is a decentralized controller of P. G models P s interaction with the surrounding environment. G r is a local environment model, to be added to controller K. How to choose G r? 20
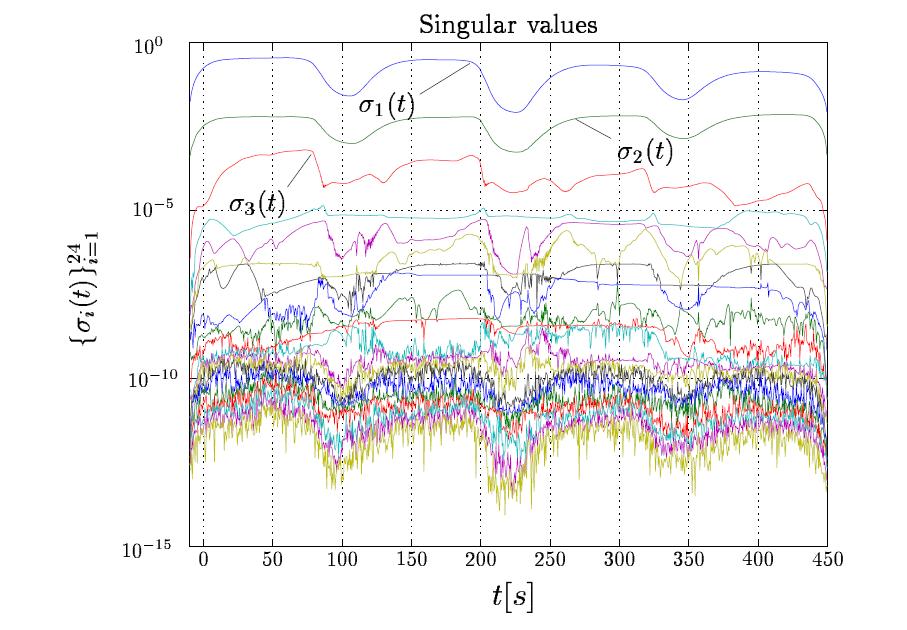
21 Example 3 (cont d) Environment G (solid blue) is a highly resonant system. In open loop, G is hard to reduce. In closed loop, only certain frequencies are important. Reduced models: G 4 (dashed red), G 6 (dashed green). 21
22 Example 3 (cont d) Upper plot: Load step response with/without G. Lower plot: Load step response with G 4 and G 6. A low-order environment model can compensate for a very complex environment! 22
23 Explanation Find proper inputs and outputs to each subsystem which reflect the subsystem s interaction with the global system. Then apply methods that solve Problem 1. Motivation: 1. Low-order feedback/feedforward controllers 2. Large interconnected systems in computer science and biology 3. Modular model reduction 23
24 What You Will Learn in the Course Norms of signals and systems, some Hilbert space theory. Realization theory: Observability and controllability from optimal control/estimation perspective. Principal Component Analysis (PCA)/Proper Orthogonal Decomposition (POD)/Singular Value Decomposition (SVD). Balanced truncation for linear systems, with extension to nonlinear systems. Hankel norm approximation. Uncertainty and robustness analysis of models (small-gain theorem), controller reduction. (Quasi-)convex optimization/lmi approaches Applications in Fluid Dynamics (by KTH Mechanics) 24
25 Course Basics Graduate level Pass/fail 7 ECTS Course code: FEL3500 Prerequisites: 1.Linear algebra 2.Basic systems theory (state-space models, controllability,observability etc.) 3.Familiarity with MATLAB 25
26 Preliminary Schedule Week Date Topic 1 27/8 Lecture 1: Introduction. The model-order-reduction problem 2 3/9 Lecture 2: Model truncation, singular perturbation. 3 7/9 Exercise 1: Review of linear systems and Hilbert spaces etc. 9/9 Lecture 3: Linear systems: POD/PCA/SVD-based simplification 4 13/9 Exercise 2 17/9 Lecture 4: Linear systems: Gramians and balanced realizations 5 20/9 Exercise 3 24/9 Lecture 5: Linear systems: Balanced truncation and weighted extensions 6 27/9 Exercise 4 1/10 Lecture 6: Applications: Controller and nonlinear model reduction 7 4/10 Exercise 5 8/10 Lecture 7: Optimal model reduction: Hankel norm approximation 8 11/10 Exercise 6 15/10 Lecture 8: Applications in fluid mechanics, by Dan Henningson, KTH Mechanics. 9 18/10 Exercise 7 22/10 Lecture 9: Quasi-convex model reduction techniques, by Kin Cheong Sou 10 28/10 Project presentations 26
27 Course Material 1 Two books entirely devoted to model reduction are available: 1. Obinata and Anderson: Model Reduction for Control Systems Design 2. Antoulas: Approximation of Large-Scale Dynamical Systems These books are not required for the course (although they are very good). Complete references on webpage. Parts of robust control books are used instead 1. Green and Limebeer: Linear Robust Control 2. Doyle, Francis, and Tannenbaum: Feedback Control Theory Available freely on the internet. Links on course webpage. 27
28 Course Material 2 Relevant research articles will be distributed. Generally no slides. White/black board will be used. Minimalistic lecture notes provided every lecture, containing: 1. Summary of most important equations and notation (generally no proofs) 2. Exercises 3. Reading advice 28
29 To Get Credits, You Need to Complete 1. Exercises At the end of the course, at least 75% of the exercises should have been solved and turned in on time. 2. Project See upcoming slide. 3. Exam A 24h hand-in exam. 29
30 1. Exercises Every set of lecture notes comes with 2-4 exercises. Handed out at each lecture (except this lecture). Exercises to be solved and turned in to me 7 days after they have been handed out. Choose what exercises to solve yourself. At least 75% of the exercises should have been solved at the end of course. Cooperation allowed. The exercises are then discussed in the following exercise session. 30
31 2. Project Choose a model that preferably relates as much as possible to your own research project. If you don t have a good model, talk to me. You should write a report and turn it in at the end of the course. The report should (at least) contain the following sections: 1. Introduction. Describe or derive the model, and explain why it should be reduced. What is there to gain by model reduction? Give a clear problem formulation. Choices of inputs and outputs. 2. Apply and analyze the result of model reduction method 1 (R1) 3. Apply and analyze the result of model reduction method 2 (R2) 4. Summarize what has been achieved. What worked, what did not work. Objectives achieved? R1 and R2 can be methods we have talked about in the course, a method you have found in the literature, or a method you come up with yourself. Method choices should be well motivated. Project presentation on Thursday 28/10. 31
32 3. Exam 24 hours No cooperation allowed Problems similar to exercises 32
33 Next Lecture Friday September 3 rd at We start with the simplest methods: Modal truncation Singular perturbation Model projection Model-reduction-method complexity increases with time in the course. First set of exercises handed out First exercise session on Tuesday September 7 th will be devoted to repetition of basic linear systems concepts, Hilbert spaces, norms, operators, Hope to see you next week! 33
Introduction to Model Order Reduction
 KTH ROYAL INSTITUTE OF TECHNOLOGY Introduction to Model Order Reduction Lecture 1: Introduction and overview Henrik Sandberg, Bart Besselink, Madhu N. Belur Overview of Today s Lecture What is model (order)
KTH ROYAL INSTITUTE OF TECHNOLOGY Introduction to Model Order Reduction Lecture 1: Introduction and overview Henrik Sandberg, Bart Besselink, Madhu N. Belur Overview of Today s Lecture What is model (order)
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 8: Youla parametrization, LMIs, Model Reduction and Summary [Ch. 11-12] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 8: Youla, LMIs, Model Reduction
FEL3210 Multivariable Feedback Control Lecture 8: Youla parametrization, LMIs, Model Reduction and Summary [Ch. 11-12] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 8: Youla, LMIs, Model Reduction
SiMpLIfy: A Toolbox for Structured Model Reduction
 SiMpLIfy: A Toolbox for Structured Model Reduction Martin Biel, Farhad Farokhi, and Henrik Sandberg ACCESS Linnaeus Center, KTH Royal Institute of Technology Department of Electrical and Electronic Engineering,
SiMpLIfy: A Toolbox for Structured Model Reduction Martin Biel, Farhad Farokhi, and Henrik Sandberg ACCESS Linnaeus Center, KTH Royal Institute of Technology Department of Electrical and Electronic Engineering,
Lecture 12. Upcoming labs: Final Exam on 12/21/2015 (Monday)10:30-12:30
10:30-12:30") 289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
Finite-Time Thermodynamics of Port-Hamiltonian Systems
 Finite-Time Thermodynamics of Port-Hamiltonian Systems Henrik Sandberg Automatic Control Lab, ACCESS Linnaeus Centre, KTH (Currently on sabbatical leave at LIDS, MIT) Jean-Charles Delvenne CORE, UC Louvain
Finite-Time Thermodynamics of Port-Hamiltonian Systems Henrik Sandberg Automatic Control Lab, ACCESS Linnaeus Centre, KTH (Currently on sabbatical leave at LIDS, MIT) Jean-Charles Delvenne CORE, UC Louvain
AE 200 Engineering Analysis and Control of Aerospace Systems
 Instructor Info Credit Class Days / Time Office Location: ENG 272C Office Hours: Monday 4:00pm 6:30pm Email: kamran.turkoglu@sjsu.edu 3 units Tuesday, 6:00pm 8:45pm Classroom CL 222 Prerequisites TA: Contact
Instructor Info Credit Class Days / Time Office Location: ENG 272C Office Hours: Monday 4:00pm 6:30pm Email: kamran.turkoglu@sjsu.edu 3 units Tuesday, 6:00pm 8:45pm Classroom CL 222 Prerequisites TA: Contact
3 Gramians and Balanced Realizations
 3 Gramians and Balanced Realizations In this lecture, we use an optimization approach to find suitable realizations for truncation and singular perturbation of G. It turns out that the recommended realizations
3 Gramians and Balanced Realizations In this lecture, we use an optimization approach to find suitable realizations for truncation and singular perturbation of G. It turns out that the recommended realizations
EL2520 Control Theory and Practice
 EL2520 Control Theory and Practice Lecture 8: Linear quadratic control Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden Linear quadratic control Allows to compute the controller
EL2520 Control Theory and Practice Lecture 8: Linear quadratic control Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden Linear quadratic control Allows to compute the controller
Introduction. Dagmar Iber Jörg Stelling. CSB Deterministic, SS 2015, 1.
 Introduction Dagmar Iber Jörg Stelling joerg.stelling@bsse.ethz.ch CSB Deterministic, SS 2015, 1 Origins of Systems Biology On this assumption of the passage of blood, made as a basis for argument, and
Introduction Dagmar Iber Jörg Stelling joerg.stelling@bsse.ethz.ch CSB Deterministic, SS 2015, 1 Origins of Systems Biology On this assumption of the passage of blood, made as a basis for argument, and
EET 3212 Control Systems. Control Systems Engineering, 6th Edition, Norman S. Nise December 2010, A. Goykadosh and M.
 NEW YORK CITY COLLEGE OF TECHNOLOGY The City University of New York 300 Jay Street Brooklyn, NY 11201-2983 Department of Electrical and Telecommunications Engineering Technology TEL (718) 260-5300 - FAX:
NEW YORK CITY COLLEGE OF TECHNOLOGY The City University of New York 300 Jay Street Brooklyn, NY 11201-2983 Department of Electrical and Telecommunications Engineering Technology TEL (718) 260-5300 - FAX:
EL2520 Control Theory and Practice
 So far EL2520 Control Theory and Practice r Fr wu u G w z n Lecture 5: Multivariable systems -Fy Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden SISO control revisited: Signal
So far EL2520 Control Theory and Practice r Fr wu u G w z n Lecture 5: Multivariable systems -Fy Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden SISO control revisited: Signal
Estimation, Detection, and Identification CMU 18752
 Estimation, Detection, and Identification CMU 18752 Graduate Course on the CMU/Portugal ECE PhD Program Spring 2008/2009 Instructor: Prof. Paulo Jorge Oliveira pjcro @ isr.ist.utl.pt Phone: +351 21 8418053
Estimation, Detection, and Identification CMU 18752 Graduate Course on the CMU/Portugal ECE PhD Program Spring 2008/2009 Instructor: Prof. Paulo Jorge Oliveira pjcro @ isr.ist.utl.pt Phone: +351 21 8418053
Lecture 5 Multivariate Linear Regression
 Lecture 5 Multivariate Linear Regression Dan Sheldon September 23, 2014 Topics Multivariate linear regression Model Cost function Normal equations Gradient descent Features Book Data 10 8 Weight (lbs.)
Lecture 5 Multivariate Linear Regression Dan Sheldon September 23, 2014 Topics Multivariate linear regression Model Cost function Normal equations Gradient descent Features Book Data 10 8 Weight (lbs.)
Control Systems I. Lecture 1: Introduction. Suggested Readings: Åström & Murray Ch. 1, Guzzella Ch. 1. Emilio Frazzoli
 Control Systems I Lecture 1: Introduction Suggested Readings: Åström & Murray Ch. 1, Guzzella Ch. 1 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 22, 2017 E. Frazzoli
Control Systems I Lecture 1: Introduction Suggested Readings: Åström & Murray Ch. 1, Guzzella Ch. 1 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 22, 2017 E. Frazzoli
EG4321/EG7040. Nonlinear Control. Dr. Matt Turner
 EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
Contents. PART I METHODS AND CONCEPTS 2. Transfer Function Approach Frequency Domain Representations... 42
 Contents Preface.............................................. xiii 1. Introduction......................................... 1 1.1 Continuous and Discrete Control Systems................. 4 1.2 Open-Loop
Contents Preface.............................................. xiii 1. Introduction......................................... 1 1.1 Continuous and Discrete Control Systems................. 4 1.2 Open-Loop
Exercise 8: Frequency Response of MIMO Systems
 Exercise 8: Frequency Response of MIMO Systems 8 Singular Value Decomposition (SVD The Singular Value Decomposition plays a central role in MIMO frequency response analysis Let s recall some concepts from
Exercise 8: Frequency Response of MIMO Systems 8 Singular Value Decomposition (SVD The Singular Value Decomposition plays a central role in MIMO frequency response analysis Let s recall some concepts from
AN OVERVIEW OF MODEL REDUCTION TECHNIQUES APPLIED TO LARGE-SCALE STRUCTURAL DYNAMICS AND CONTROL MOTIVATING EXAMPLE INVERTED PENDULUM
 Controls Lab AN OVERVIEW OF MODEL REDUCTION TECHNIQUES APPLIED TO LARGE-SCALE STRUCTURAL DYNAMICS AND CONTROL Eduardo Gildin (UT ICES and Rice Univ.) with Thanos Antoulas (Rice ECE) Danny Sorensen (Rice
Controls Lab AN OVERVIEW OF MODEL REDUCTION TECHNIQUES APPLIED TO LARGE-SCALE STRUCTURAL DYNAMICS AND CONTROL Eduardo Gildin (UT ICES and Rice Univ.) with Thanos Antoulas (Rice ECE) Danny Sorensen (Rice
Department of Mechanical Engineering MECH 221 (with MECH 224 & MATH 255) Engineering Science I
 Engineering Science I") Department of Mechanical Engineering MECH 221 (with MECH 224 & MATH 255) Engineering Science I Calendar Description: Rigid body kinetics and kinematics, basic electrical circuits, work and power, stress
Department of Mechanical Engineering MECH 221 (with MECH 224 & MATH 255) Engineering Science I Calendar Description: Rigid body kinetics and kinematics, basic electrical circuits, work and power, stress
Using Model Reduction techniques for simulating the heat transfer in electronic systems.
 Using Model Reduction techniques for simulating the heat transfer in electronic systems. -Pramod Mathai, Dr. Benjamin Shapiro, University of Maryland, College Park Abstract: There is an increasing need
Using Model Reduction techniques for simulating the heat transfer in electronic systems. -Pramod Mathai, Dr. Benjamin Shapiro, University of Maryland, College Park Abstract: There is an increasing need
CS168: The Modern Algorithmic Toolbox Lecture #8: How PCA Works
 CS68: The Modern Algorithmic Toolbox Lecture #8: How PCA Works Tim Roughgarden & Gregory Valiant April 20, 206 Introduction Last lecture introduced the idea of principal components analysis (PCA). The
CS68: The Modern Algorithmic Toolbox Lecture #8: How PCA Works Tim Roughgarden & Gregory Valiant April 20, 206 Introduction Last lecture introduced the idea of principal components analysis (PCA). The
Control Systems I. Lecture 1: Introduction. Suggested Readings: Åström & Murray Ch. 1. Jacopo Tani
 Control Systems I Lecture 1: Introduction Suggested Readings: Åström & Murray Ch. 1 Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 21, 2018 J. Tani, E. Frazzoli (ETH)
Control Systems I Lecture 1: Introduction Suggested Readings: Åström & Murray Ch. 1 Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 21, 2018 J. Tani, E. Frazzoli (ETH)
Kernel Methods in Machine Learning
 Kernel Methods in Machine Learning Autumn 2015 Lecture 1: Introduction Juho Rousu ICS-E4030 Kernel Methods in Machine Learning 9. September, 2015 uho Rousu (ICS-E4030 Kernel Methods in Machine Learning)
Kernel Methods in Machine Learning Autumn 2015 Lecture 1: Introduction Juho Rousu ICS-E4030 Kernel Methods in Machine Learning 9. September, 2015 uho Rousu (ICS-E4030 Kernel Methods in Machine Learning)
Introduction to Computer Control Systems
 Introduction to Computer Control Systems Lecture 1: Introduction Dave Zachariah Div. Systems and Control, Dept. Information Technology, Uppsala University October 28, 2014 (UU/Info Technology/SysCon) Intro.
Introduction to Computer Control Systems Lecture 1: Introduction Dave Zachariah Div. Systems and Control, Dept. Information Technology, Uppsala University October 28, 2014 (UU/Info Technology/SysCon) Intro.
MODULI SPACES AND DEFORMATION THEORY, CLASS 1. Contents 1. Preliminaries 1 2. Motivation for moduli spaces Deeper into that example 4
 MODULI SPACES AND DEFORMATION THEORY, CLASS 1 RAVI VAKIL Contents 1. Preliminaries 1 2. Motivation for moduli spaces 3 2.1. Deeper into that example 4 1. Preliminaries On the off chance that any of you
MODULI SPACES AND DEFORMATION THEORY, CLASS 1 RAVI VAKIL Contents 1. Preliminaries 1 2. Motivation for moduli spaces 3 2.1. Deeper into that example 4 1. Preliminaries On the off chance that any of you
Machine Learning (Spring 2012) Principal Component Analysis
 Principal Component Analysis") 1-71 Machine Learning (Spring 1) Principal Component Analysis Yang Xu This note is partly based on Chapter 1.1 in Chris Bishop s book on PRML and the lecture slides on PCA written by Carlos Guestrin in
1-71 Machine Learning (Spring 1) Principal Component Analysis Yang Xu This note is partly based on Chapter 1.1 in Chris Bishop s book on PRML and the lecture slides on PCA written by Carlos Guestrin in
Control Systems I. Lecture 2: Modeling. Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch Emilio Frazzoli
 Control Systems I Lecture 2: Modeling Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch. 2-3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 29, 2017 E. Frazzoli
Control Systems I Lecture 2: Modeling Suggested Readings: Åström & Murray Ch. 2-3, Guzzella Ch. 2-3 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 29, 2017 E. Frazzoli
H -Optimal Control and Related Minimax Design Problems
 Tamer Başar Pierre Bernhard H -Optimal Control and Related Minimax Design Problems A Dynamic Game Approach Second Edition 1995 Birkhäuser Boston Basel Berlin Contents Preface v 1 A General Introduction
Tamer Başar Pierre Bernhard H -Optimal Control and Related Minimax Design Problems A Dynamic Game Approach Second Edition 1995 Birkhäuser Boston Basel Berlin Contents Preface v 1 A General Introduction
TEACHING NUMERICAL LINEAR ALGEBRA AT THE UNDERGRADUATE LEVEL by Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University
 TEACHING NUMERICAL LINEAR ALGEBRA AT THE UNDERGRADUATE LEVEL by Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University DeKalb, IL 60115 E-mail: dattab@math.niu.edu What is Numerical
TEACHING NUMERICAL LINEAR ALGEBRA AT THE UNDERGRADUATE LEVEL by Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University DeKalb, IL 60115 E-mail: dattab@math.niu.edu What is Numerical
CS264: Beyond Worst-Case Analysis Lecture #15: Topic Modeling and Nonnegative Matrix Factorization
 CS264: Beyond Worst-Case Analysis Lecture #15: Topic Modeling and Nonnegative Matrix Factorization Tim Roughgarden February 28, 2017 1 Preamble This lecture fulfills a promise made back in Lecture #1,
CS264: Beyond Worst-Case Analysis Lecture #15: Topic Modeling and Nonnegative Matrix Factorization Tim Roughgarden February 28, 2017 1 Preamble This lecture fulfills a promise made back in Lecture #1,
A Singular Value Decomposition Based Closed Loop Stability Preserving Controller Reduction Method
 A Singular Value Decomposition Based Closed Loop Stability Preserving Controller Reduction Method Kin Cheong Sou and Anders Rantzer Abstract In this paper a controller reduction method which preserves
A Singular Value Decomposition Based Closed Loop Stability Preserving Controller Reduction Method Kin Cheong Sou and Anders Rantzer Abstract In this paper a controller reduction method which preserves
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 6: Robust stability and performance in MIMO systems [Ch.8] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 6: Robust Stability and Performance () FEL3210
FEL3210 Multivariable Feedback Control Lecture 6: Robust stability and performance in MIMO systems [Ch.8] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 6: Robust Stability and Performance () FEL3210
Linear algebra for MATH2601: Theory
 Linear algebra for MATH2601: Theory László Erdős August 12, 2000 Contents 1 Introduction 4 1.1 List of crucial problems............................... 5 1.2 Importance of linear algebra............................
Linear algebra for MATH2601: Theory László Erdős August 12, 2000 Contents 1 Introduction 4 1.1 List of crucial problems............................... 5 1.2 Importance of linear algebra............................
Linear Algebra Review
 Linear Algebra Review CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Linear Algebra Review 1 / 16 Midterm Exam Tuesday Feb
Linear Algebra Review CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Linear Algebra Review 1 / 16 Midterm Exam Tuesday Feb
Technical report bds:00-21
 Delft University of Technology Fac. of Information Technology and Systems Control Systems Engineering Technical report bds:00-21 Stability Analysis of Discrete Event Systems (by K.M. Passino and K.L. Burgess,
Delft University of Technology Fac. of Information Technology and Systems Control Systems Engineering Technical report bds:00-21 Stability Analysis of Discrete Event Systems (by K.M. Passino and K.L. Burgess,
SYLLABUS SEFS 540 / ESRM 490 B Optimization Techniques for Natural Resources Spring 2017
 SYLLABUS SEFS 540 / ESRM 490 B Optimization Techniques for Natural Resources Spring 2017 Lectures: Winkenwerder Hall 107, 4:50-5:50pm, MW Labs: Mary Gates Hall 030, 1:30-2:50pm, Th Course Web Site: http://faculty.washington.edu/toths/course.shtml
SYLLABUS SEFS 540 / ESRM 490 B Optimization Techniques for Natural Resources Spring 2017 Lectures: Winkenwerder Hall 107, 4:50-5:50pm, MW Labs: Mary Gates Hall 030, 1:30-2:50pm, Th Course Web Site: http://faculty.washington.edu/toths/course.shtml
Announcements Monday, November 13
 Announcements Monday, November 13 The third midterm is on this Friday, November 17. The exam covers 3.1, 3.2, 5.1, 5.2, 5.3, and 5.5. About half the problems will be conceptual, and the other half computational.
Announcements Monday, November 13 The third midterm is on this Friday, November 17. The exam covers 3.1, 3.2, 5.1, 5.2, 5.3, and 5.5. About half the problems will be conceptual, and the other half computational.
FBE / Advanced Topics in Engineering Mathematics. Date Fall Credits 3 credits Course Title
 Date Fall 2015-2016 Credits 3 credits Course Title Course Number Math 501 Advanced Topics in Engineering Mathematics Pre-requisite (s) None Co-requisite (s) None Hours 36 Out of Class 90 Work Hours Place
Date Fall 2015-2016 Credits 3 credits Course Title Course Number Math 501 Advanced Topics in Engineering Mathematics Pre-requisite (s) None Co-requisite (s) None Hours 36 Out of Class 90 Work Hours Place
Contents. 1 State-Space Linear Systems 5. 2 Linearization Causality, Time Invariance, and Linearity 31
 Contents Preamble xiii Linear Systems I Basic Concepts 1 I System Representation 3 1 State-Space Linear Systems 5 1.1 State-Space Linear Systems 5 1.2 Block Diagrams 7 1.3 Exercises 11 2 Linearization
Contents Preamble xiii Linear Systems I Basic Concepts 1 I System Representation 3 1 State-Space Linear Systems 5 1.1 State-Space Linear Systems 5 1.2 Block Diagrams 7 1.3 Exercises 11 2 Linearization
ECE 516: System Control Engineering
 ECE 516: System Control Engineering This course focuses on the analysis and design of systems control. This course will introduce time-domain systems dynamic control fundamentals and their design issues
ECE 516: System Control Engineering This course focuses on the analysis and design of systems control. This course will introduce time-domain systems dynamic control fundamentals and their design issues
CONTROL SYSTEMS, ROBOTICS AND AUTOMATION CONTENTS VOLUME VII
 CONTENTS VOLUME VII Control of Linear Multivariable Systems 1 Katsuhisa Furuta,Tokyo Denki University, School of Science and Engineering, Ishizaka, Hatoyama, Saitama, Japan 1. Linear Multivariable Systems
CONTENTS VOLUME VII Control of Linear Multivariable Systems 1 Katsuhisa Furuta,Tokyo Denki University, School of Science and Engineering, Ishizaka, Hatoyama, Saitama, Japan 1. Linear Multivariable Systems
Review: transient and steady-state response; DC gain and the FVT Today s topic: system-modeling diagrams; prototype 2nd-order system
 Plan of the Lecture Review: transient and steady-state response; DC gain and the FVT Today s topic: system-modeling diagrams; prototype 2nd-order system Plan of the Lecture Review: transient and steady-state
Plan of the Lecture Review: transient and steady-state response; DC gain and the FVT Today s topic: system-modeling diagrams; prototype 2nd-order system Plan of the Lecture Review: transient and steady-state
AUTOMATIC CONTROL. Andrea M. Zanchettin, PhD Spring Semester, Introduction to Automatic Control & Linear systems (time domain)
") 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Introduction to Automatic Control & Linear systems (time domain) 2 What is automatic control? From Wikipedia Control theory is an interdisciplinary
1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Introduction to Automatic Control & Linear systems (time domain) 2 What is automatic control? From Wikipedia Control theory is an interdisciplinary
Operator based robust right coprime factorization and control of nonlinear systems
 Operator based robust right coprime factorization and control of nonlinear systems September, 2011 Ni Bu The Graduate School of Engineering (Doctor s Course) TOKYO UNIVERSITY OF AGRICULTURE AND TECHNOLOGY
Operator based robust right coprime factorization and control of nonlinear systems September, 2011 Ni Bu The Graduate School of Engineering (Doctor s Course) TOKYO UNIVERSITY OF AGRICULTURE AND TECHNOLOGY
A brief introduction to robust H control
 A brief introduction to robust H control Jean-Marc Biannic System Control and Flight Dynamics Department ONERA, Toulouse. http://www.onera.fr/staff/jean-marc-biannic/ http://jm.biannic.free.fr/ European
A brief introduction to robust H control Jean-Marc Biannic System Control and Flight Dynamics Department ONERA, Toulouse. http://www.onera.fr/staff/jean-marc-biannic/ http://jm.biannic.free.fr/ European
arxiv: v1 [math.oc] 17 Oct 2014
![arxiv: v1 [math.oc] 17 Oct 2014](/thumbs/88/117008567.jpg "arxiv: v1 [math.oc] 17 Oct 2014") SiMpLIfy: A Toolbox for Structured Model Reduction Martin Biel, Farhad Farokhi, and Henrik Sandberg arxiv:1414613v1 [mathoc] 17 Oct 214 Abstract In this paper, we present a toolbox for structured model
SiMpLIfy: A Toolbox for Structured Model Reduction Martin Biel, Farhad Farokhi, and Henrik Sandberg arxiv:1414613v1 [mathoc] 17 Oct 214 Abstract In this paper, we present a toolbox for structured model
Linear System Theory. Wonhee Kim Lecture 1. March 7, 2018
 Linear System Theory Wonhee Kim Lecture 1 March 7, 2018 1 / 22 Overview Course Information Prerequisites Course Outline What is Control Engineering? Examples of Control Systems Structure of Control Systems
Linear System Theory Wonhee Kim Lecture 1 March 7, 2018 1 / 22 Overview Course Information Prerequisites Course Outline What is Control Engineering? Examples of Control Systems Structure of Control Systems
Wednesday, 10 September 2008
 MA211 : Calculus, Part 1 Lecture 2: Sets and Functions Dr Niall Madden (Mathematics, NUI Galway) Wednesday, 10 September 2008 MA211 Lecture 2: Sets and Functions 1/33 Outline 1 Short review of sets 2 Sets
MA211 : Calculus, Part 1 Lecture 2: Sets and Functions Dr Niall Madden (Mathematics, NUI Galway) Wednesday, 10 September 2008 MA211 Lecture 2: Sets and Functions 1/33 Outline 1 Short review of sets 2 Sets
Outline. Wednesday, 10 September Schedule. Welcome to MA211. MA211 : Calculus, Part 1 Lecture 2: Sets and Functions
 Outline MA211 : Calculus, Part 1 Lecture 2: Sets and Functions Dr Niall Madden (Mathematics, NUI Galway) Wednesday, 10 September 2008 1 Short review of sets 2 The Naturals: N The Integers: Z The Rationals:
Outline MA211 : Calculus, Part 1 Lecture 2: Sets and Functions Dr Niall Madden (Mathematics, NUI Galway) Wednesday, 10 September 2008 1 Short review of sets 2 The Naturals: N The Integers: Z The Rationals:
Introduction to Modern Control MT 2016
 CDT Autonomous and Intelligent Machines & Systems Introduction to Modern Control MT 2016 Alessandro Abate Outline of this module Instructors: A. Abate, P.J. Goulart, K. Margellos Teaching Assistants: A.
CDT Autonomous and Intelligent Machines & Systems Introduction to Modern Control MT 2016 Alessandro Abate Outline of this module Instructors: A. Abate, P.J. Goulart, K. Margellos Teaching Assistants: A.
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
CO350 Linear Programming Chapter 5: Basic Solutions
 CO350 Linear Programming Chapter 5: Basic Solutions 30th May 005 Chapter 5: Basic Solutions 1 Last week, we learn Recap Definition of a basis B of matrix A. Definition of basic solution x of Ax = b determined
CO350 Linear Programming Chapter 5: Basic Solutions 30th May 005 Chapter 5: Basic Solutions 1 Last week, we learn Recap Definition of a basis B of matrix A. Definition of basic solution x of Ax = b determined
OPTIMAL CONTROL AND ESTIMATION
 OPTIMAL CONTROL AND ESTIMATION Robert F. Stengel Department of Mechanical and Aerospace Engineering Princeton University, Princeton, New Jersey DOVER PUBLICATIONS, INC. New York CONTENTS 1. INTRODUCTION
OPTIMAL CONTROL AND ESTIMATION Robert F. Stengel Department of Mechanical and Aerospace Engineering Princeton University, Princeton, New Jersey DOVER PUBLICATIONS, INC. New York CONTENTS 1. INTRODUCTION
The integrating factor method (Sect. 1.1)
") The integrating factor method (Sect. 1.1) Overview of differential equations. Linear Ordinary Differential Equations. The integrating factor method. Constant coefficients. The Initial Value Problem. Overview
The integrating factor method (Sect. 1.1) Overview of differential equations. Linear Ordinary Differential Equations. The integrating factor method. Constant coefficients. The Initial Value Problem. Overview
Upper and Lower Bounds of Frequency Interval Gramians for a Class of Perturbed Linear Systems Shaker, Hamid Reza
 Aalborg Universitet Upper and Lower Bounds of Frequency Interval Gramians for a Class of Perturbed Linear Systems Shaker, Hamid Reza Published in: 7th IFAC Symposium on Robust Control Design DOI (link
Aalborg Universitet Upper and Lower Bounds of Frequency Interval Gramians for a Class of Perturbed Linear Systems Shaker, Hamid Reza Published in: 7th IFAC Symposium on Robust Control Design DOI (link
Modeling & Simulation 2018 Lecture 12. Simulations
 Modeling & Simulation 2018 Lecture 12. Simulations Claudio Altafini Automatic Control, ISY Linköping University, Sweden Summary of lecture 7-11 1 / 32 Models of complex systems physical interconnections,
Modeling & Simulation 2018 Lecture 12. Simulations Claudio Altafini Automatic Control, ISY Linköping University, Sweden Summary of lecture 7-11 1 / 32 Models of complex systems physical interconnections,
Preface. Figures Figures appearing in the text were prepared using MATLAB R. For product information, please contact:
 Linear algebra forms the basis for much of modern mathematics theoretical, applied, and computational. The purpose of this book is to provide a broad and solid foundation for the study of advanced mathematics.
Linear algebra forms the basis for much of modern mathematics theoretical, applied, and computational. The purpose of this book is to provide a broad and solid foundation for the study of advanced mathematics.
The Important State Coordinates of a Nonlinear System
 The Important State Coordinates of a Nonlinear System Arthur J. Krener 1 University of California, Davis, CA and Naval Postgraduate School, Monterey, CA ajkrener@ucdavis.edu Summary. We offer an alternative
The Important State Coordinates of a Nonlinear System Arthur J. Krener 1 University of California, Davis, CA and Naval Postgraduate School, Monterey, CA ajkrener@ucdavis.edu Summary. We offer an alternative
CDS Final Exam
 CDS 22 - Final Exam Instructor: Danielle C. Tarraf December 4, 2007 INSTRUCTIONS : Please read carefully! () Description & duration of the exam: The exam consists of 6 problems. You have a total of 24
CDS 22 - Final Exam Instructor: Danielle C. Tarraf December 4, 2007 INSTRUCTIONS : Please read carefully! () Description & duration of the exam: The exam consists of 6 problems. You have a total of 24
Dissipativity. Outline. Motivation. Dissipative Systems. M. Sami Fadali EBME Dept., UNR
 Dissipativity M. Sami Fadali EBME Dept., UNR 1 Outline Differential storage functions. QSR Dissipativity. Algebraic conditions for dissipativity. Stability of dissipative systems. Feedback Interconnections
Dissipativity M. Sami Fadali EBME Dept., UNR 1 Outline Differential storage functions. QSR Dissipativity. Algebraic conditions for dissipativity. Stability of dissipative systems. Feedback Interconnections
 2018 SPRING PHYS 8011 Classical mechanics I (as of Apr. 19/2018) The course syllabus is a general plan for the course; deviations announced to the class by the instructor may be necessary. A FRIENDLY REMINDER:
2018 SPRING PHYS 8011 Classical mechanics I (as of Apr. 19/2018) The course syllabus is a general plan for the course; deviations announced to the class by the instructor may be necessary. A FRIENDLY REMINDER:
Announcements Monday, November 13
 Announcements Monday, November 13 The third midterm is on this Friday, November 17 The exam covers 31, 32, 51, 52, 53, and 55 About half the problems will be conceptual, and the other half computational
Announcements Monday, November 13 The third midterm is on this Friday, November 17 The exam covers 31, 32, 51, 52, 53, and 55 About half the problems will be conceptual, and the other half computational
Designing Information Devices and Systems II Fall 2018 Elad Alon and Miki Lustig Homework 9
 EECS 16B Designing Information Devices and Systems II Fall 18 Elad Alon and Miki Lustig Homework 9 This homework is due Wednesday, October 31, 18, at 11:59pm. Self grades are due Monday, November 5, 18,
EECS 16B Designing Information Devices and Systems II Fall 18 Elad Alon and Miki Lustig Homework 9 This homework is due Wednesday, October 31, 18, at 11:59pm. Self grades are due Monday, November 5, 18,
Computational Modeling for Physical Sciences
 Computational Modeling for Physical Sciences Since the invention of computers the use of computational modeling and simulations have revolutionized the way we study physical systems. Their applications
Computational Modeling for Physical Sciences Since the invention of computers the use of computational modeling and simulations have revolutionized the way we study physical systems. Their applications
LINEAR SYSTEMS THEORY
 LINEAR SYSTEMS THEORY 2ND EDITION João P. Hespanha December 22, 2017 Disclaimer: This is a draft and probably contains a few typos. Comments and information about typos are welcome. Please contact the
LINEAR SYSTEMS THEORY 2ND EDITION João P. Hespanha December 22, 2017 Disclaimer: This is a draft and probably contains a few typos. Comments and information about typos are welcome. Please contact the
Reduced Basis Method for Parametric
 1/24 Reduced Basis Method for Parametric H 2 -Optimal Control Problems NUMOC2017 Andreas Schmidt, Bernard Haasdonk Institute for Applied Analysis and Numerical Simulation, University of Stuttgart andreas.schmidt@mathematik.uni-stuttgart.de
1/24 Reduced Basis Method for Parametric H 2 -Optimal Control Problems NUMOC2017 Andreas Schmidt, Bernard Haasdonk Institute for Applied Analysis and Numerical Simulation, University of Stuttgart andreas.schmidt@mathematik.uni-stuttgart.de
LU Factorization. LU factorization is the most common way of solving linear systems! Ax = b LUx = b
 AM 205: lecture 7 Last time: LU factorization Today s lecture: Cholesky factorization, timing, QR factorization Reminder: assignment 1 due at 5 PM on Friday September 22 LU Factorization LU factorization
AM 205: lecture 7 Last time: LU factorization Today s lecture: Cholesky factorization, timing, QR factorization Reminder: assignment 1 due at 5 PM on Friday September 22 LU Factorization LU factorization
ME451 Kinematics and Dynamics of Machine Systems
 ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
ME451 Kinematics and Dynamics of Machine Systems Introduction to Dynamics Newmark Integration Formula [not in the textbook] December 9, 2014 Dan Negrut ME451, Fall 2014 University of Wisconsin-Madison
Lecture 4: Analysis of MIMO Systems
 Lecture 4: Analysis of MIMO Systems Norms The concept of norm will be extremely useful for evaluating signals and systems quantitatively during this course In the following, we will present vector norms
Lecture 4: Analysis of MIMO Systems Norms The concept of norm will be extremely useful for evaluating signals and systems quantitatively during this course In the following, we will present vector norms
BALANCING-RELATED MODEL REDUCTION FOR DATA-SPARSE SYSTEMS
 BALANCING-RELATED Peter Benner Professur Mathematik in Industrie und Technik Fakultät für Mathematik Technische Universität Chemnitz Computational Methods with Applications Harrachov, 19 25 August 2007
BALANCING-RELATED Peter Benner Professur Mathematik in Industrie und Technik Fakultät für Mathematik Technische Universität Chemnitz Computational Methods with Applications Harrachov, 19 25 August 2007
MAT 343 Laboratory 6 The SVD decomposition and Image Compression
 MA 4 Laboratory 6 he SVD decomposition and Image Compression In this laboratory session we will learn how to Find the SVD decomposition of a matrix using MALAB Use the SVD to perform Image Compression
MA 4 Laboratory 6 he SVD decomposition and Image Compression In this laboratory session we will learn how to Find the SVD decomposition of a matrix using MALAB Use the SVD to perform Image Compression
CDS 101/110a: Lecture 1.1 Introduction to Feedback & Control. CDS 101/110 Course Sequence
 CDS 101/110a: Lecture 1.1 Introduction to Feedback & Control Richard M. Murray 28 September 2015 Goals: Give an overview of CDS 101/110: course structure & administration Define feedback systems and learn
CDS 101/110a: Lecture 1.1 Introduction to Feedback & Control Richard M. Murray 28 September 2015 Goals: Give an overview of CDS 101/110: course structure & administration Define feedback systems and learn
Mathematical Relationships Between Representations of Structure in Linear Interconnected Dynamical Systems
 American Control Conference on O'Farrell Street, San Francisco, CA, USA June 9 - July, Mathematical Relationships Between Representations of Structure in Linear Interconnected Dynamical Systems E. Yeung,
American Control Conference on O'Farrell Street, San Francisco, CA, USA June 9 - July, Mathematical Relationships Between Representations of Structure in Linear Interconnected Dynamical Systems E. Yeung,
Intro to Linear & Nonlinear Optimization
 ECE 174 Intro to Linear & Nonlinear Optimization i Ken Kreutz-Delgado ECE Department, UCSD Contact Information Course Website Accessible from http://dsp.ucsd.edu/~kreutz Instructor Ken Kreutz-Delgado kreutz@ece.ucsd.eduucsd
ECE 174 Intro to Linear & Nonlinear Optimization i Ken Kreutz-Delgado ECE Department, UCSD Contact Information Course Website Accessible from http://dsp.ucsd.edu/~kreutz Instructor Ken Kreutz-Delgado kreutz@ece.ucsd.eduucsd
The model reduction algorithm proposed is based on an iterative two-step LMI scheme. The convergence of the algorithm is not analyzed but examples sho
 Model Reduction from an H 1 /LMI perspective A. Helmersson Department of Electrical Engineering Linkoping University S-581 8 Linkoping, Sweden tel: +6 1 816 fax: +6 1 86 email: andersh@isy.liu.se September
Model Reduction from an H 1 /LMI perspective A. Helmersson Department of Electrical Engineering Linkoping University S-581 8 Linkoping, Sweden tel: +6 1 816 fax: +6 1 86 email: andersh@isy.liu.se September
ECE317 : Feedback and Control
 ECE317 : Feedback and Control Lecture : Steady-state error Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling Analysis Design Laplace
ECE317 : Feedback and Control Lecture : Steady-state error Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling Analysis Design Laplace
Chapter 3. Tohru Katayama
 Subspace Methods for System Identification Chapter 3 Tohru Katayama Subspace Methods Reading Group UofA, Edmonton Barnabás Póczos May 14, 2009 Preliminaries before Linear Dynamical Systems Hidden Markov
Subspace Methods for System Identification Chapter 3 Tohru Katayama Subspace Methods Reading Group UofA, Edmonton Barnabás Póczos May 14, 2009 Preliminaries before Linear Dynamical Systems Hidden Markov
Differential Geometry for Image Processing
 MSc TU/e Course: Differential Geometry for Image Processing Teachers: R. Duits MF 7.072 (responsible teacher, lecturer) E.J. Bekkers MF 7.074 (teacher, instructor) Course Description: This MSc course aims
MSc TU/e Course: Differential Geometry for Image Processing Teachers: R. Duits MF 7.072 (responsible teacher, lecturer) E.J. Bekkers MF 7.074 (teacher, instructor) Course Description: This MSc course aims
Project TOUCAN. A Study of a Two-Can System. Prof. R.G. Longoria Update Fall ME 144L Prof. R.G. Longoria Dynamic Systems and Controls Laboratory
 Project TOUCAN A Study of a Two-Can System Prof. R.G. Longoria Update Fall 2009 Laboratory Goals Gain familiarity with building models that reflect reality. Show how a model can be used to guide physical
Project TOUCAN A Study of a Two-Can System Prof. R.G. Longoria Update Fall 2009 Laboratory Goals Gain familiarity with building models that reflect reality. Show how a model can be used to guide physical
Empirical Gramians and Balanced Truncation for Model Reduction of Nonlinear Systems
 Empirical Gramians and Balanced Truncation for Model Reduction of Nonlinear Systems Antoni Ras Departament de Matemàtica Aplicada 4 Universitat Politècnica de Catalunya Lecture goals To review the basic
Empirical Gramians and Balanced Truncation for Model Reduction of Nonlinear Systems Antoni Ras Departament de Matemàtica Aplicada 4 Universitat Politècnica de Catalunya Lecture goals To review the basic
Résonance et contrôle en cavité ouverte
 Résonance et contrôle en cavité ouverte Jérôme Hœpffner KTH, Sweden Avec Espen Åkervik, Uwe Ehrenstein, Dan Henningson Outline The flow case Investigation tools resonance Reduced dynamic model for feedback
Résonance et contrôle en cavité ouverte Jérôme Hœpffner KTH, Sweden Avec Espen Åkervik, Uwe Ehrenstein, Dan Henningson Outline The flow case Investigation tools resonance Reduced dynamic model for feedback
Frequency-Weighted Model Reduction with Applications to Structured Models
 27 American Control Conference http://.cds.caltech.edu/~murray/papers/sm7-acc.html Frequency-Weighted Model Reduction ith Applications to Structured Models Henrik Sandberg and Richard M. Murray Abstract
27 American Control Conference http://.cds.caltech.edu/~murray/papers/sm7-acc.html Frequency-Weighted Model Reduction ith Applications to Structured Models Henrik Sandberg and Richard M. Murray Abstract
Lecture 7 : Generalized Plant and LFT form Dr.-Ing. Sudchai Boonto Assistant Professor
 Dr.-Ing. Sudchai Boonto Assistant Professor Department of Control System and Instrumentation Engineering King Mongkuts Unniversity of Technology Thonburi Thailand Linear Quadratic Gaussian The state space
Dr.-Ing. Sudchai Boonto Assistant Professor Department of Control System and Instrumentation Engineering King Mongkuts Unniversity of Technology Thonburi Thailand Linear Quadratic Gaussian The state space
Network Structure Preserving Model Reduction with Weak A Priori Structural Information
 Network Structure Preserving Model Reduction with Weak A Priori Structural Information E. Yeung, J. Gonçalves, H. Sandberg, S. Warnick Information and Decision Algorithms Laboratories Brigham Young University,
Network Structure Preserving Model Reduction with Weak A Priori Structural Information E. Yeung, J. Gonçalves, H. Sandberg, S. Warnick Information and Decision Algorithms Laboratories Brigham Young University,
DECENTRALIZED CONTROL DESIGN USING LMI MODEL REDUCTION
 Journal of ELECTRICAL ENGINEERING, VOL. 58, NO. 6, 2007, 307 312 DECENTRALIZED CONTROL DESIGN USING LMI MODEL REDUCTION Szabolcs Dorák Danica Rosinová Decentralized control design approach based on partial
Journal of ELECTRICAL ENGINEERING, VOL. 58, NO. 6, 2007, 307 312 DECENTRALIZED CONTROL DESIGN USING LMI MODEL REDUCTION Szabolcs Dorák Danica Rosinová Decentralized control design approach based on partial
CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER
 114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
114 CHAPTER 5 ROBUSTNESS ANALYSIS OF THE CONTROLLER 5.1 INTRODUCTION Robust control is a branch of control theory that explicitly deals with uncertainty in its approach to controller design. It also refers
GIST 4302/5302: Spatial Analysis and Modeling
 GIST 4302/5302: Spatial Analysis and Modeling Spring 2014 Lectures: Tuesdays & Thursdays 2:00pm-2:50pm, Holden Hall 00038 Lab sessions: Tuesdays or Thursdays 3:00pm-4:50pm or Wednesday 1:00pm-2:50pm, Holden
GIST 4302/5302: Spatial Analysis and Modeling Spring 2014 Lectures: Tuesdays & Thursdays 2:00pm-2:50pm, Holden Hall 00038 Lab sessions: Tuesdays or Thursdays 3:00pm-4:50pm or Wednesday 1:00pm-2:50pm, Holden
1 Cricket chirps: an example
 Notes for 2016-09-26 1 Cricket chirps: an example Did you know that you can estimate the temperature by listening to the rate of chirps? The data set in Table 1 1. represents measurements of the number
Notes for 2016-09-26 1 Cricket chirps: an example Did you know that you can estimate the temperature by listening to the rate of chirps? The data set in Table 1 1. represents measurements of the number
Tensor network simulations of strongly correlated quantum systems
 CENTRE FOR QUANTUM TECHNOLOGIES NATIONAL UNIVERSITY OF SINGAPORE AND CLARENDON LABORATORY UNIVERSITY OF OXFORD Tensor network simulations of strongly correlated quantum systems Stephen Clark LXXT[[[GSQPEFS\EGYOEGXMZMXMIWUYERXYQGSYVWI
CENTRE FOR QUANTUM TECHNOLOGIES NATIONAL UNIVERSITY OF SINGAPORE AND CLARENDON LABORATORY UNIVERSITY OF OXFORD Tensor network simulations of strongly correlated quantum systems Stephen Clark LXXT[[[GSQPEFS\EGYOEGXMZMXMIWUYERXYQGSYVWI
Two well known examples. Applications of structured low-rank approximation. Approximate realisation = Model reduction. System realisation
 Two well known examples Applications of structured low-rank approximation Ivan Markovsky System realisation Discrete deconvolution School of Electronics and Computer Science University of Southampton The
Two well known examples Applications of structured low-rank approximation Ivan Markovsky System realisation Discrete deconvolution School of Electronics and Computer Science University of Southampton The
Math Partial Differential Equations
 Math 531 - Partial Differential Equations to Partial Differential Equations Joseph M. Mahaffy, jmahaffy@sdsu.edu Department of Mathematics and Statistics Dynamical Systems Group Computational Sciences
Math 531 - Partial Differential Equations to Partial Differential Equations Joseph M. Mahaffy, jmahaffy@sdsu.edu Department of Mathematics and Statistics Dynamical Systems Group Computational Sciences
Announcements Monday, September 18
 Announcements Monday, September 18 WeBWorK 1.4, 1.5 are due on Wednesday at 11:59pm. The first midterm is on this Friday, September 22. Midterms happen during recitation. The exam covers through 1.5. About
Announcements Monday, September 18 WeBWorK 1.4, 1.5 are due on Wednesday at 11:59pm. The first midterm is on this Friday, September 22. Midterms happen during recitation. The exam covers through 1.5. About
M E M O R A N D U M. Faculty Senate approved November 1, 2018
 M E M O R A N D U M Faculty Senate approved November 1, 2018 TO: FROM: Deans and Chairs Becky Bitter, Sr. Assistant Registrar DATE: October 23, 2018 SUBJECT: Minor Change Bulletin No. 5 The courses listed
M E M O R A N D U M Faculty Senate approved November 1, 2018 TO: FROM: Deans and Chairs Becky Bitter, Sr. Assistant Registrar DATE: October 23, 2018 SUBJECT: Minor Change Bulletin No. 5 The courses listed
SAT-Solvers: propositional logic in action
 SAT-Solvers: propositional logic in action Russell Impagliazzo, with assistence from Cameron Held October 22, 2013 1 Personal Information A reminder that my office is 4248 CSE, my office hours for CSE
SAT-Solvers: propositional logic in action Russell Impagliazzo, with assistence from Cameron Held October 22, 2013 1 Personal Information A reminder that my office is 4248 CSE, my office hours for CSE
Interdisciplinary Guided Research. Dynamical Systems & Scientific Computing
 Interdisciplinary Guided Research at tthe Edge of Dynamical Systems & Scientific Computing Ernst Otto Fischer-Lehrpreis 2011 der TU München Dr. Tobias Neckel Dr. (Fakultät für Informatik) (Fakultät für
Interdisciplinary Guided Research at tthe Edge of Dynamical Systems & Scientific Computing Ernst Otto Fischer-Lehrpreis 2011 der TU München Dr. Tobias Neckel Dr. (Fakultät für Informatik) (Fakultät für
Prerequisite: Math 40 or Math 41B with a minimum grade of C, or the equivalent.
 MATH 80 Intermediate Algebra #0630 El Camino College Room: MCS 219A MTWTH 11:30 12:40pm Fall 2011 Instructor: GREG FRY email: gfry@elcamino.edu Voice Mail: 310-660-3573 (5220) Office: MCS 104U Office Hours:
MATH 80 Intermediate Algebra #0630 El Camino College Room: MCS 219A MTWTH 11:30 12:40pm Fall 2011 Instructor: GREG FRY email: gfry@elcamino.edu Voice Mail: 310-660-3573 (5220) Office: MCS 104U Office Hours:
MAS156: Mathematics (Electrical and Aerospace)
") MAS156: Mathematics (Electrical and Aerospace) Dr Sam Marsh mas-engineering@sheffield.ac.uk Tuesday 17th October 2017, 1pm Diamond LT4 Course matters Online tests Some people had problems in the early
MAS156: Mathematics (Electrical and Aerospace) Dr Sam Marsh mas-engineering@sheffield.ac.uk Tuesday 17th October 2017, 1pm Diamond LT4 Course matters Online tests Some people had problems in the early
MAT 211, Spring 2015, Introduction to Linear Algebra.
 MAT 211, Spring 2015, Introduction to Linear Algebra. Lecture 04, 53103: MWF 10-10:53 AM. Location: Library W4535 Contact: mtehrani@scgp.stonybrook.edu Final Exam: Monday 5/18/15 8:00 AM-10:45 AM The aim
MAT 211, Spring 2015, Introduction to Linear Algebra. Lecture 04, 53103: MWF 10-10:53 AM. Location: Library W4535 Contact: mtehrani@scgp.stonybrook.edu Final Exam: Monday 5/18/15 8:00 AM-10:45 AM The aim
Introduction to Machine Learning. PCA and Spectral Clustering. Introduction to Machine Learning, Slides: Eran Halperin
 1 Introduction to Machine Learning PCA and Spectral Clustering Introduction to Machine Learning, 2013-14 Slides: Eran Halperin Singular Value Decomposition (SVD) The singular value decomposition (SVD)
1 Introduction to Machine Learning PCA and Spectral Clustering Introduction to Machine Learning, 2013-14 Slides: Eran Halperin Singular Value Decomposition (SVD) The singular value decomposition (SVD)
Lecture 9. Introduction to Kalman Filtering. Linear Quadratic Gaussian Control (LQG) G. Hovland 2004
 G. Hovland 2004") MER42 Advanced Control Lecture 9 Introduction to Kalman Filtering Linear Quadratic Gaussian Control (LQG) G. Hovland 24 Announcement No tutorials on hursday mornings 8-9am I will be present in all practical
MER42 Advanced Control Lecture 9 Introduction to Kalman Filtering Linear Quadratic Gaussian Control (LQG) G. Hovland 24 Announcement No tutorials on hursday mornings 8-9am I will be present in all practical