A New Radiation Condition for Ships Travelling with Very Low Forward Speed
|
|
|
- Colin Nelson
- 6 years ago
- Views:
Transcription
1 A New Radiation Condition for Ships Travelling with Very Low Forward Speed *Zhi-Ming Yuan, Atilla Incecik, Laibing Jia Department of Naval Architecture, Ocean and Marine Engineering, University of Strathclyde, Henry Dyer Building, G4 LZ, Glasgow, UK Abstract: The 3-D Rankine source method is becoming a very popular method for the seakeeping problem, especially when marine vessels are travelling with forward speed. However, this method requires an accurate radiation condition to ensure that the waves propagate away from the ship. Considerable effort has been expanded for the accurate formulation of the radiation condition when a ship travels at the moderate to high speed range, and significant progress has been made in the last few decades when the Brard number τ is greater than.5. But for the very low forward speed problem (τ<.5), the ordinary radiation condition will not be valid since the scattered waves will propagate ahead of the vessel. The primary purpose of the present study which is to be presented in this paper is to investigate the formulation of a new radiation condition which can account for the very low forward speed problem. To verify this new radiation condition, a Wigley III hull has been modelled by using the 3-D panel method. The hydrodynamic coefficients and the wave pattern of the vessel at zero speed and travelling with very low and medium forward speeds are calculated separately. From the comparisons of the present results with experimental measurements, it can be concluded that the new radiation condition can accurately predict the hydrodynamic properties of vessels travelling with low to medium forward speed or stationary in waves. Keywords: Low forward speed; Rankine source method; Radiation condition; Wave pattern; Boundary element method. Introduction The prediction of hydrodynamic responses of marine structures with forward speed has drawn intensive attention for many decades. There are a considerable number of publications concerning the prediction of hydrodynamic responses of vessels travelling in waves. Based upon the Green function employed in the boundary integral formulation, these papers could be divided into two categories. In the first category, the translating and pulsating sources are only distributed on the wetted body surface. This method utilizes a Green function that satisfies the Kelvin free surface conditions, as well as the radiation condition (Newman, 985, 99). It is an effective method for the zero forward problems, but if the vessel is travelling with forward speed, this method still has some limitations. Firstly, it could not account for the near-field flow condition. Although some researchers (Lee and Sclavounos, 989; Nossen et al., 99) extended it to include the near-field free surface condition, the so-called irregular frequency still cannot be avoided. And it will bring singularity to the coefficient matrix equation. Secondly, it is impossible for the Green function to account for the interaction between the steady and unsteady flow. Corresponding author at: Dep. of Naval Architecture, Ocean & Marine Engineering, University of Strathclyde. Henry Dyer Building, G4 LZ, Glasgow, UK. Tel: + 44 () Fax: +44 () address: zhiming.yuan@strath.ac.uk
2 The second category is called Rankine source approach, which uses a very simple Green function in the boundary integral formulation. This method requires the sources distributed not only on the body surface, but also on the free surface and control surface. Therefore, a flexible choice of free-surface conditions can be realized in these methods. The coupled behavior between steady and unsteady wave potential could be expressed in a direct formula. Meanwhile, the nonlinearity on the free surface could also be added in the boundary condition. For these reasons, the Rankine source approach has been used by many investigators since it has been first proposed by Hess and Smith (Hess and Smith, 964). Investigators from MIT (Kring, 994; Nakos and Sclavounos, 99; Scalvounos and Nakos, 988) applied the Rankine source approach to model steady and unsteady waves as a ship moves in waves. An analysis technique developed by Sclavounos and Nakos (Scalvounos and Nakos, 988) for the propagation of gravity waves on a panelized free surface showed that a Rankine method could adequately predict the ship wave patterns and forces. Their work led to the development of a frequency-domain formulation for ship motions with a consistent linearization based upon the double body steady flow model which assumes small and moderate Froude numbers. Applications were reported by Nakos et al. (99). This model was extended to the time domain by Kring (994) who also proposed a physically rational set of Kutta conditions at a ship s transom stern. Recently, Gao et al. (Gao and Zou, 8) developed a high-order Rankine panel method based on Non- Uniform Rational B-Spline (NURBS) to solve the 3-D radiation and diffraction problems with forward speed. Their results had very good agreement with the experimental data. However, there are still some limitations for the extensive use of the Rankine source approach. First of all, the Rankine source method requires much more panels which will considerably increase the computation time, especially when the matrix equation is full range matrix. However, the computation time will strongly depend on the numerical method and computer language. As the performance of computers increase rapidly, it only takes less than minute to solve a 4 4 full range matrix using Matlab. Typically, the number of panels will be no more than,. The computation time is acceptable in engineering applications. Besides, the Rankine source method requires a suitable radiation boundary condition to account for the scattered waves in current. A very popular radiation condition for the forward speed problem, which is so-called upstream radiation condition, was proposed by Nakos (Nakos, 99). The free surface was truncated at some upstream points, and two boundary conditions were imposed at these points to ensure the consistency of the upstream truncation of the free surface. Another method to deal with the radiation condition is to move the source points on the free surface at some distance downstream (Jensen et al., 986). The results from these two methods show very good agreement with published experimental data when the Brard number τ (τ =uω/g) is greater than.5, since they are both based on the assumption that there is no scattered wave travelling ahead of the vessel. However, when the forward speed of the vessel is very low, the Brard number will smaller than.5. When this case occurs, the scattered waves could travel ahead of the vessel, and these traditional radiation conditions could no longer be valid. Low forward speed problem could occur when the ships are travelling in harbour areas or between tugs and vessels during escorting or manoeuvring and berthing operations as well as during ship-to-ship operations for cargo transfers during oil and gas offloading operations. It also occurs in transport and towage of the offshore structures to their operation sites. Coudray and Le Guen (99) compared the wave patterns generated by a submerged source for various simplifications of the linearized Neumann-Kelvin boundary condition at low value of τ =.8. Ba and Guillbaud (995) used Kelvin singularities to get a fast
 at various values of τ ranging from. to 4 and good agreement was achieved.")
3 and efficient method to compute the unsteady Green s function for different Froude numbers. They compared their wave patterns with that of Noblesse and Hendrix (99) at various values of τ ranging from. to 4 and good agreement was achieved. However, these studies were all based on the Green function which could satisfy the far field radiation condition automatically. The low forward speed problem can also be solved by using Rankine source panel method, but the main difficult is due to the numerical satisfaction of the radiation condition. To find a reasonable radiation condition for very low forward speed problem, Das and Cheung (a, b) provided an alternate solution to the boundary-value problem for forward speeds above and below the group velocity of the scattered waves. They corrected the Sommerfeld radiation condition by taking into account the Doppler shift of the scattered waves at the control surface that truncates the infinite fluid domain. They compared their results with the experimental data, and good agreement was achieved. In the present study, this new radiation condition of Das and Cheung (b) is adapted to complement of the boundary-value problem. A Wigley hull with different forward speeds will be studied. The results obtained are compared with Journee s experimental data (Journee, 99), which could verify the effectiveness of the new radiation condition. Mathematical formulations based on potential theory. Boundary value problem Fig. An example vessel and coordinate system Fig. shows a vessel travelling with a constant forward speed in a Cartesian coordinate system which is moving together with the body. The origin is located on the still water and axis Z points upward. X and Y axis is on the geometric centroid of the water-plane. Based on the assumption that the surrounding fluid is inviscid and incompressible, and that the motion is irrotational, the total velocity potential exists which satisfies the Laplace equation in the whole fluid domain. For linearization, the total potential can be decomposed into 3
4 s 7 i et ( x, t) u x ( x) Re ( x, y, z) e () where φ s is the steady potential and it is assumed to be small. φ (=,,, 6) is the radiation potential corresponding to the oscillations of the body in six degrees of freedom and η (=,,, 6) is the corresponding motion amplitude (η : surge; η : sway; η 3: heave; η 4: roll; η 5: pitch; η 6: yaw). φ is potential of the incident waves and η is the incident wave amplitude. φ 7 is the diffraction potential due to the diffraction wave amplitude η 7 with η 7= η and ω e is the encounter frequency, which can be written as e uk cos () Linear wave theory provides the potential for unit-amplitude incident waves as ig e k[ zi( xcos ysin )] (3) where k / g corresponds to head sea)., ω is the incident wave frequency, β is the angle of wave heading (β=8 deg When the steady wave flow is selected as a basic flow model, the steady perturbation potential φ s can then be solved by the following boundary value problem: in the fluid domain (4) s u x z s s g on the undisturbed free surface S f (5) s n un on the mean wetted part of the body surface S b (6) Moreover, a radiation condition in the far field control surface must be imposed to prevent the wave reflection from the truncated computational domain. This will be discussed in the next section. The unsteady perturbation potential φ can then be solved by the following boundary value problem: in the fluid domain (7) e ieu u g x x z on the undisturbed free surface S f (8) i n u m,,,...,6, 7 n e n on the mean wetted part of the body surface S b (9) 4
5 The radiation condition at infinity is also imposed to complete the boundary value problem, which will be discussed latter. The generalized normal vectors are defined as n n,,,3 x n, 4,5, 6 and n n, n, ) is the unit normal vector directed inward on body surface S b, x ( x, y, z) is the ( n3 position vector on S b. The m denotes the -th component of the so-called m-term, which can be expressed as () m n s,,,3 n x s, 4,5, 6 () The m-terms provide coupling effects between the steady and unsteady flows and involve the second derivatives of the steady potential. However, in the present study, we are interested in the very low forward speed problem. Therefore, the Neumann-Kelvin linearization can be used to simplify the m-terms, ( m, m, m ) (,,) 3 ( m, m, m ) (, n, n ) (). Radiation condition Fig. Sketch of Doppler shift 5
6 Fig. 3 Radiation condition Fig. shows the Doppler Shift of scattered wave field by a vessel travelling with constant forward speed u in the positive x direction. When a vessel is moving from point B to point O, the traveling time should be t=bo/u. During this period of time, the vessel produces scattered waves all along BO (the first scattered wave should arise at point B). The control surface here is defined as a circle with its centroid on point O and its radius as BO. If u is small, the travelling time t will be very long, which means the scattered waves produced at point B can travel a long distance. When it ust reaches point A, the wave group is reaching point O (the wave group velocity is half of scattered wave velocity). In this case, the Brard number τ=.5 (τ=u ω/g), u =u c (u c denotes the critical forward speed of the vessel at τ=.5) and the scattered wave can reach any points on the control surface. If τ<.5 and u <u c, the wave group will go head of the vessel. Therefore, the upstream radiation condition could not be used any longer. If τ>.5 and u >u c, the scattered wave can only get to point D, as shown in Fig. 3. On arc DA, there are no scattered waves reaching here, and it is defined as S C. To the contrary, arc BD is defined as S C, on which a different radiation condition should be imposed. From Fig. 3, the wave direction of a scattered wave reaching point D (x, y), which is produced at B, have been rotated by an angle θ (if there is no forward speed, the wave direction should be along OD. The velocity of the scattered wave is defined as c, BO/u =BD/c. According to the sine theorem, it can be easily transferred to u x y sin (3) c y The scattered wave velocity at D can be expressed as c k s (4) s 6
7 ks where ω s is the angular frequency of the scattered waves from a fixed reference point given as y s e uks cos[tan ] gks tanh ks d x (5) in which k s is the local wave number at D(x, y), and d is the water depth. Once the coordinates of any arbitrary point on the control surface are given, the unknowns θ and k s could be obtained by solving the nonlinear equation system (3)-(5). If one cannot find solutions, these points must be on the control surface S c. Otherwise, they are on S c. The radiation condition is defined as two different equations, n ik s cos (=,,, 6) on S c (6) (=,,, 6) on S c (7) Eq. (6) is an updated Sommerfeld radiation condition with forward speed correction. If the forward speed is zero, k s=k, θ = and Eq. (6) could reduce to the Sommerfeld radiation condition ik n (=,,, 6) on S c (8) Fig. 4 Rectangle control surface Fn=. Fn=. Fn=. Fn= Element number 7
8 ks Fig. 5 Local wave number on rectangle control surface Fig. 6 Circular control surface Fn=. Fn=. Fn=. Fn= Element number Fig. 7 Local wave number on circular control surface Fig. 4 and Fig. 6 show a Wigley hull traveling with different Froude number in the positive x direction and the free surface is truncated by a rectangle and circular control surface respectively. The control surface is dispersed into a series of discrete elements ( elements in the present model). Fig. 5 and Fig. 7 are the results of the local wave number k s on different control surfaces and different Froude numbers. k s = illustrates that no solution is found at these elements and these points are on S C. It can be found from Fig. 5 that as the Froude number increases, the range of S c shrinks. At Fn=, θ= and k s=k, which is a constant independent of the location. When Fn=., the scattered wave at B can only reach No.- elements, and for No.3- elements, no solution can be found here. When the Froude number increases to.3, only No.-5 elements on the downstream end can be influenced by the scattered waves. The values of k s are inversely proportional to the distance between B and the points on the control surface. Fig. 7 transmits the same information as Fig. 5, which indicates that the truncation of free surface could be arbitrary and k s and θ are only determined by the coordinates of the points on the control surface. However, in the numerical study, the free surface range will greatly influence the computational results, and this will be discussed in the next section..3 Equations of motion Once the unknown potential φ s and φ are solved, the steady pressure and the time-harmonic pressure can be obtained from Bernoulli s equation: 8
9 p u x s s s s (9) p ie ( s ux), =,,, 7 () The steady hydrodynamic forces are obtained by the pressure integral on the wetted body surface as follows: F p n ds, i=,,, 6 () s i s i Sb The wave making resistance can be defined as C w F s () u S where S is the area of the wetted body surface. The hydrodynamic force produced by the oscillatory motions of the vessel in the six degrees of freedom can be derived from the radiation potential as 6 6 D i i e i e i S b F p n ds i, i=,,, 6 (3) where i written as and i are the added mass and damping coefficients matrices respectively, which can be n ds, i, =,,, 6 (4) R i u e I i e x Sb n ds, i, =,,, 6 (5) I i u e R i e x Sb φ R is the real part of -th potential, and φ I is the imaginary part. The wave excitation force can be obtained by the integration of incident and diffraction pressure as ext i ( 7) i (6) Sb F p p n ds Applying Newton s second law, the six components of ship motions in the frequency domain can be obtained by solving the following equations of motions: 9
10 6 ext e Mi i iei K i Fi (7) The mass matrix M i and restoring matrix coefficient K i are given by M i m mzg m mzg mx G m mxg mzg I44 I46 mzg mxg I55 mxg I64 I66 (8) K i gaw gm w g( Iw VzB) gm w g( Iw VzB ) (9) where m is the body mass; (x G, y G, z G) is the center of gravity; I 44, I 55 and I 66 are the roll, pitch and yaw moments of inertia; the roll-yaw moment of inertia holds the symmetry relation I 46= I 64; A w is the water plane area; M w is the first moment of the water plane about the y-axis; I w and I w are the second moment of the water plane about the x-axis and y-axis respectively; V is the underwater volume; z B is the vertical center of buoyancy. The standard matrix solution routine provides the complex amplitude of the oscillatory motions from Eq. (7). Then, the wave elevation can be obtained from the dynamic free surface boundary condition in the form 7 7 ie ( ux ) ( ) g (3) s g 3 Numerical implementation 3. Discretization of the boundary integral In the numerical study, the boundary is divided into a number of quadrilateral panels with constant source density ( ), where (,, ) is the position vector on the boundary. If x ( x, y, z) is inside the fluid domain or on the boundary surface, the potential can be expressed by a source distribution on the boundary of the fluid domain:
11 ( x) ( ) G( x, ) ds (3) Sb S f Sc where φ denotes the steady potential φ s or the unsteady potential φ, function given by G( x, ) is the Rankine-type Green Gx (, ) ( x ) ( y ) ( z ) (3) If we have N panels on the body surface, free surface and control surface together, the potential in point x becomes ( x ) G( x, ) ds G (33) N N i i i, 4 4 Sb S f S c When the collocation point and the panel are close to each other, the influence coefficients G i can be calculated with analytical formulas listed by Prins (995) when the distance between the collocation point and the panel is large, these coefficients are calculated numerically. The same procedure can be applied to discretize the boundary integral for the velocity ( x ) G( x, ) ds G n (34) N N n i i i i i, 4 n 4 Sb S f Sc i i i The analytical formulas of the influence coefficients 3. Desingularied method n G i, are listed by Hess and Smith (964). The singularity distribution does not have to be located on the free surface itself, it can also be located at a short distance above the free surface, as long as the collocation points, where the boundary condition has to be satisfied, stay on the free surface. In practice, a distance of maximal three times the longitudinal size of a panel is possible (Bunnik, 999). In the present study, the raised distance z area of the i-th panel. i S i, where S i is the Special attentions should be paid on the second derivative of the potential on the free surface. Generally, the difference schemes can be divided in two classes: up wind difference schemes and central difference schemes. Although central difference schemes are supposed to be more accurate, the stabilizing properties of the upwind difference schemes are more desired in the forward speed problem (Bunnik, 999). Physically this can be explained by the face that new information on the wave pattern mainly comes from the upstream side, especially at high speeds, whereas the downstream side only contains old information. The first-order upwind difference scheme for the second derivative of the potential to x can be written as follows
12 ( x i) ( xi ) ( xi ) ( xi ) x x (35) 4 Validation and application In the numerical study, a Wigley III hull advancing in head sea is modelled by using the new radiation condition. Journee s (99) experimental results are quoted to verify the efficiency of the present model. The model can be defined as s B z x x y. D L L (36) The main dimensions of Wigley III model is shown in Table. Table Main dimensions of Wigley III hull Length, L (m) 3 Breadth, B (m).3 Draught, D(m).875 Displacement, V(m 3 ).78 Centre of rotation above base, KR(m).875 Centre of gravity above base, KG(m).7 Radius of inertia for pitch, k yy (m).75 The computational range on the free surface is extended to L upstream, L downstream and L sideways, where L=3m is the length of the vessel. Since the flow around a symmetric body is symmetric about x-z plane, only half computational domain is modelled. There are 3 panels on the body surface, 7 on free surface and on the control surface, which is shown in Fig. 8. But the free surface is extended to L upstream, 3L downstream and L sideways in the steady wave problem in order to simulate the full Kelvin wave.

13 Fig. 8 Panels of the computational model 4. Steady wave problem 3



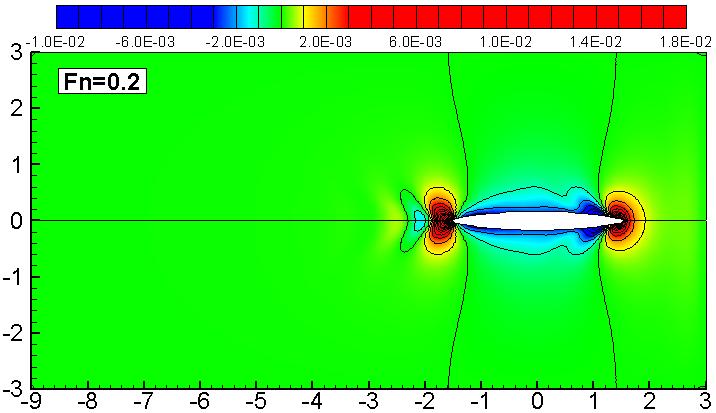
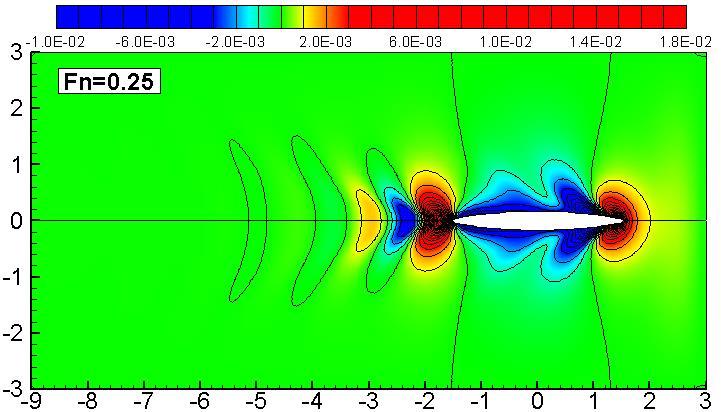
14 Fig. 9 Steady wave pattern at various speeds 4
.")

15 Cw* Present code Exp. (SRI) Exp. (TOKYO) Fn Fig. Wave making resistance of the Wigley hull Fig. 9 shows the comparison of the wave pattern around the Wigley hull at different Froude numbers ( F u / gl ). As can be seen in these figures, the steady wave elevation attenuates rapidly behind the n ship. The diverging waves are radiating from the bow together with the transverse waves following behind the stern. The Kelvin angle increases as the forward speed of the ship increases. At Fn=., the steady wave elevation is very small, which means the energy dissipation is relatively small at low forward speed. This can also be observed from the wave making resistance in Fig.. Compared with the ITTC experimental results (SRI: Ship Research Institute, Tokyo; TOKYO: University of Tokyo), the present results based on the steady flow is satisfactory. It can be found that in the very low forward speed region, the wave making resistance is quite small. 4. The radiation problem (a) Fn=, τ= (b) Fn=.37, τ=. 5
 Fn=.83, τ=.")



16 (c) Fn=.68, τ=. (d) Fn=.83, τ=.5 (e) Fn=.85, τ=.6 Fig. Radiation wave pattern induced by unit heave motion at very low forward speed 6
17 (a) Fn=., τ=.75 (b) Fn=.3, τ=.3 Fig. Radiation wave pattern induced by unit heave motion at medium forward speed Fig. and Fig. are the radiation wave pattern induced by unit heave motion. The wave length to ship length ratio of λ/l= in head sea corresponds to the critical conditions in ship design. In order to investigate how the new double Doppler shift radiation condition changes the radiation wave pattern in very low forward speed, we make the comparison between the present model and Sommerfeld radiation condition over various range of Brard number from to.3. The lower half of each sub-figure of Fig. shows the wave pattern obtained from Sommerfield radiation condition, while the radiation condition in the upper half account for the new double Doppler shift radiation condition defined by Eqs. (6)-(7). At zero forward speed, the wave elevation calculated from present radiation condition is exactly the same as that from Sommerfeld radiation condition. The waves propagate as a circle pattern beyond one wavelength from the center with the main radiation energy on either side of the vessel. From Fig. (b) and Fig. (c) we can find that even at very low forward speed, the Doppler shift becomes evident and it modifies the wave length. The wave length downstream is larger than the upstream wave length. It can also be found that if the new radiation condition associated with Doppler shift correction is used, the waves appear smooth and stable. While for the Sommerfeld radiation condition, there are some distortions and reflections from the control surface. As the Brard number increases to.5, or ust a little greater than.5, the forward speed of the vessel is equal to or greater than the wave group velocity. There should be no waves propagating ahead of the vessel. This phenomenon could be illustrated well from Fig. (d) and Fig. (e). And also, the wave pattern is smooth and stable by using the new model. At Fn=. and Fn=.3, the quiescent region ahead of the vessel expands, and the wave behaves as a V-shape downstream, which can be seen from Fig /V 3 53 /VL e L/g e L/g (a) Heave added mass induced by heave motion (b) Pitch added mass induced by heave motion 7
18 /Vg/L.5 53 /VLg/L e L/g e L/g (c) Heave damping induced by heave motion (d) Pitch damping induced by heave motion Fig. 3 Hydrodynamic coefficients of heave motion at Fn=.. (- -, Fn=;, Present calculation;, Experiment, η3=.5cm;, Experiment, η3=5cm) /VL /VL e L/g e L/g (a) Heave added mass induced by pitch motion (b) Pitch added mass induced by pitch motion /VLg/L /VL g/l e L/g e L/g (c) Heave damping induced by pitch motion (d) Pitch damping induced by pitch motion Fig. 4 Hydrodynamic coefficients of pitch motion at Fn=.. (- -, Fn=;, Present calculation;, Experiment, η5=.5 ;, Experiment, η5=3 ) 8

.")
 is used and the coupling effects between the steady and unsteady flows have been neglected.")

19 Fig. 3 and Fig. 4 compare the hydrodynamic coefficients between the present calculations and experimental results. Overall, the agreement is quite good in added mass and damping coefficients of heave and pitch motion. Discrepancy arises near τ=.5 ( L / g. 6 ). This phenomenon has also been observed by Kim and Shin (7) by using Green function method. The main reason for the difference lies on the steady wave m terms given by Eq. (). In the present code, the free-stream assumption of Eq. () is used and the coupling effects between the steady and unsteady flows have been neglected. However, this m-term appeared in the body boundary condition will bring some influences to the radiation problem, which is reflected in the hydrodynamic coefficients. In order to get better hydrodynamic coefficients, the double-body or steady-wave flow should be taken as the basic flow. Experimental data for very low forward speed is unfortunately not available. 4.3 The Diffraction problem e (a) Fn=, τ= (b) Fn=.37, τ=. (c) Fn=.68, τ=. (d) Fn=.83, τ=.5 9

20 (e) Fn=.85, τ=.6 Fig. 5 Diffraction wave pattern at very low forward speed (a) Fn=., τ=.75 (b) Fn=.3, τ=.3 Fig. 6 Diffraction wave pattern at medium forward speed Fig. 5 and Fig. 6 are the diffraction wave patterns induced by unit heave motion. The lower half of each sub-figure of Fig. 5 shows the wave pattern obtained from Sommerfield radiation condition, while the radiation condition in the upper half account for the new double Doppler shift radiation condition defined by Eqs. (6)-(7). At zero forward speed, the two radiation conditions are identical and produce the same wave pattern. But as the Brard number increases up to.6, as shown from Fig. 5 (b)-(c), the Doppler shift becomes evident and it modifies the wave length. Some distortions and reflections can be found in the Sommerfeld radiation condition, while the new radiation condition associated with Doppler shift correction provides a better solution of stable wave pattern. Fig. 6 shows the diffraction wave pattern induced by unit heave motion at medium forward speed of Fn=. and Fn=.3.
21 .8.8 F 3 / K F 5 /k K /L /L (a) (b) Fig. 7 Wave exciting forces at Fn=.. (- -, Fn=;, Present calculation;, Experiment). (a) Heave; (b) Pitch. Good agreement of wave exciting forces between the present calculation and experimental results can be observed in Fig. 7. The forward speed effect on the wave exciting forces is not significant. And it is different to the radiation problem that the diffraction potential does not strongly depend on the steady flow solution since m terms appear only in the body boundary condition for the radiation problem. 4.4 Response amplitude operator / /k /L /L (a) (b) Fig. 8 Response amplitude operators at Fn=.. (- -, Fn=;, Present calculation;, Experiment). (a) Heave; (b) Pitch. It can be seen from Fig. 8 that the heave and pitch RAO calculated by the present method agrees well with the model test results of Journee (99). Peak values in the heave and pitch RAOs can be observed at λ/l= and. corresponding to resonance of the Wigley hull in the respective motions. But at zero forward speed, there is no peak and the RAO curve differs considerably from the forward speed curve. 5 Conclusions A 3-D Rankine source panel method has been developed to predict the hydrodynamic properties of marine vessels travelling with very low or medium forward speeds. A new radiation condition is used when a
22 vessel moves with very low forward speed. This new radiation condition corrects the Sommerfeld radiation condition by taking into account of Doppler shift. A Wigley III hull travelling with very low or medium forward speed was considered to verify this radiation conditon. Comparing with the experimental data, the following conclusions can be reached: ) The new radiation condition associated with Doppler shift correction can provide a good solution of scatterd wave pattern at very low forward speed. The wave field appears more stable and reasonable than Sommerfeld radiation condition over a range of Brard number up to.6. ) The present method is also effective to predict the hydrodynamic properties of the vessel travelling with medium forward speed. The wave pattern at medium forward speed appears stable and there is no reflection from the control surface. The calculated wave exciting forces and motion RAOs have a very good agreement with the model test results. Small discrepancy appears in predicting the hydrodynamic coefficients in radiation problem due to the coupled effects between the steady flow and radiation potential being neglected, which should be taken into account in the body surface boundary condition in order to obtain more accurate results. Overall, the agreement is found satisfactory. 6 Acknowledgments The present work is mainly funded by Lloyd's Register. Authors are grateful to Lloyd s Register for their support. 7 References Ba, M., Guillbaud, M., 995. A fast method of evaluation for the translating and pulsating green's function. Ship Technology Research 4 (), Bunnik, T., 999. Seakeeping calculations for ships, taking into account the non-linear steady waves, PhD thesis. Delft University of Technology, The Netherlands. Coudray, T., Le Guen, J.F., 99. Validation of a 3-D Sea-Keeping Software, 4th CADMO, Madrid, pp Das, S., Cheung, K.F., a. Hydroelasticity of marine vessels advancing in a seaway. Journal of Fluids and Structures 34, 7-9. Das, S., Cheung, K.F., b. Scattered waves and motions of marine vessels advancing in a seaway. Wave Motion 49 (), Gao, Z., Zou, Z., 8. A NURBS-based high-order panel method for three-dimensional radiation and diffraction problems with forward speed. Ocean Engineering 35 (-), 7-8. Hess, J.L., Smith, A.M.O., 964. Calculation of nonlifting potential flow about arbitrary three-dimensional bodies. Journal of Ship Reaearch 8 (), -44. Jensen, G., Mi, Z.X., Söding, H., 986. Rankine source methods for numerical solutions of steady wave resistance problem, Proceedings of 6th Symposium on Naval Hydrodynamics, Berkeley, pp Journee, J.M.J., 99. Experiments and calculations on 4 Wigley hull forms in head waves, Report No. 99. Ship Hydromechanics Laboratory, Delft University of Technology, The Netherlands. Kim, B., Shin, Y., 7. Steady flow approximations in 3-D ship motion calculation. Journal of Ship Reaearch 5 (3), Kring, D.C., 994. Time domain ship motions by a three-dimensional Rankine panel method, PhD Thesis. MIT. Lee, C.H., Sclavounos, P.D., 989. Removing the irregular frequencies from integral equations in wave-body interactions. Journal of Fluid Mechanics 7,
23 Nakos, D.E., 99. Ship wave patterns and motions by a three dimensional Rankine panel method, PhD Thesis. MIT. Nakos, D.E., Sclavounos, P.D., 99. Steady and unsteady ship wave patterns. Journal of Fluid Mechanics 5, Newman, J.N., 985. Algorithms for the Free-Surface Green Function. Journal of Engineering Mathematics 8 (3), Newman, J.N., 99. The Approximation of Free-Surface Green Function, Wave Asymptotics, in: Martin, P.A.a.W., G.R. (Ed.), The Proceedings of the Meeting to Mark the Retirement of Professor Fritz Useel from the Beyer Chair of Applied Mathematics in University of Manchester. Cambridge University Press, pp Noblesse, F., Hendrix, D., 99. On the theory of potential flow about a ship advancing in waves. Journal of Ship Reaearch 36 (), 7-3. Nossen, J., Grue, J., Palm, E., 99. Wave forces on three-dimensional floating bodies with small forward speed. Journal of Fluid Mechanics 7, Prins, H.J., 995. Time domain calculations of drift forces and moments, PhD Thesis. Delft University of Technology, The Netherlands. Scalvounos, P.D., Nakos, D.E., 988. Stability analysis of panel methods for free surface flows with forward speed, 7th Symposium on Naval Hydrodynamics, Den Hague, Nederland. 3
Investigation of side wall and ship model interaction
 Yuan, Zhi-Ming and Incecik, Atilla (6) Investigation of side wall and ship model interaction. In: 6 International Conference on Maritime Technology, 6-7-6-6-7-8., This version is available at https://strathprints.strath.ac.uk/5797/
Yuan, Zhi-Ming and Incecik, Atilla (6) Investigation of side wall and ship model interaction. In: 6 International Conference on Maritime Technology, 6-7-6-6-7-8., This version is available at https://strathprints.strath.ac.uk/5797/
Seakeeping Models in the Frequency Domain
 Seakeeping Models in the Frequency Domain (Module 6) Dr Tristan Perez Centre for Complex Dynamic Systems and Control (CDSC) Prof. Thor I Fossen Department of Engineering Cybernetics 18/09/2007 One-day
Seakeeping Models in the Frequency Domain (Module 6) Dr Tristan Perez Centre for Complex Dynamic Systems and Control (CDSC) Prof. Thor I Fossen Department of Engineering Cybernetics 18/09/2007 One-day
1 POTENTIAL FLOW THEORY Formulation of the seakeeping problem
 1 POTENTIAL FLOW THEORY Formulation of the seakeeping problem Objective of the Chapter: Formulation of the potential flow around the hull of a ship advancing and oscillationg in waves Results of the Chapter:
1 POTENTIAL FLOW THEORY Formulation of the seakeeping problem Objective of the Chapter: Formulation of the potential flow around the hull of a ship advancing and oscillationg in waves Results of the Chapter:
Seakeeping characteristics of intact and damaged ship in the Adriatic Sea
 Towards Green Marine Technology and Transport Guedes Soares, Dejhalla & Pavleti (Eds) 2015 Taylor & Francis Group, London, ISBN 978-1-138-02887-6 Seakeeping characteristics of intact and damaged ship in
Towards Green Marine Technology and Transport Guedes Soares, Dejhalla & Pavleti (Eds) 2015 Taylor & Francis Group, London, ISBN 978-1-138-02887-6 Seakeeping characteristics of intact and damaged ship in
International Journal of Scientific & Engineering Research Volume 9, Issue 2, February ISSN
 International Journal of Scientific & Engineering Research Volume 9, Issue, February-8 48 Structural Response of a Standalone FPSO by Swell Wave in Offshore Nigeria Abam Tamunopekere Joshua*, Akaawase
International Journal of Scientific & Engineering Research Volume 9, Issue, February-8 48 Structural Response of a Standalone FPSO by Swell Wave in Offshore Nigeria Abam Tamunopekere Joshua*, Akaawase
TIME-DOMAIN SIMULATION OF THE WAVE-
 Chinese-German Joint ymposium on Hydraulic and Ocean Engineering, August 4-3, 8, Darmstadt TIME-DOMAIN IMULATION OF THE WAVE- CURRENT DIFFRACTION FROM 3D BOD Abstract: Zhen Liu, ing Gou and Bin Teng tate
Chinese-German Joint ymposium on Hydraulic and Ocean Engineering, August 4-3, 8, Darmstadt TIME-DOMAIN IMULATION OF THE WAVE- CURRENT DIFFRACTION FROM 3D BOD Abstract: Zhen Liu, ing Gou and Bin Teng tate
INVESTIGATION OF SEAKEEPING CHARACTERISTICS OF HIGH-SPEED CATAMARANS IN WAVES
 Journal of Marine Science and Technology, Vol. 12, No. 1, pp. 7-15 (2004) 7 INVESTIGATION OF SEAKEEPING CHARACTERISTICS OF HIGH-SPEED CATAMARANS IN WAVES Chih-Chung Fang* and Hoi-Sang Chan** Key words:
Journal of Marine Science and Technology, Vol. 12, No. 1, pp. 7-15 (2004) 7 INVESTIGATION OF SEAKEEPING CHARACTERISTICS OF HIGH-SPEED CATAMARANS IN WAVES Chih-Chung Fang* and Hoi-Sang Chan** Key words:
SEAKEEPING AND MANEUVERING Prof. Dr. S. Beji 2
 SEAKEEPING AND MANEUVERING Prof. Dr. S. Beji 2 Ship Motions Ship motions in a seaway are very complicated but can be broken down into 6-degrees of freedom motions relative to 3 mutually perpendicular axes
SEAKEEPING AND MANEUVERING Prof. Dr. S. Beji 2 Ship Motions Ship motions in a seaway are very complicated but can be broken down into 6-degrees of freedom motions relative to 3 mutually perpendicular axes
Motions and Resistance of a Ship in Regular Following Waves
 Reprinted: 01-11-2000 Revised: 03-10-2007 Website: www.shipmotions.nl Report 440, September 1976, Delft University of Technology, Ship Hydromechanics Laboratory, Mekelweg 2, 2628 CD Delft, The Netherlands.
Reprinted: 01-11-2000 Revised: 03-10-2007 Website: www.shipmotions.nl Report 440, September 1976, Delft University of Technology, Ship Hydromechanics Laboratory, Mekelweg 2, 2628 CD Delft, The Netherlands.
Min-Guk Seo, Dong-Min Park, Jae-Hoon Lee, Kyong-Hwan Kim, Yonghwan Kim
 International Research Exchange Meeting of Ship and Ocean Engineering in Osaka, December 1-, Osaka, Japan Comparative Study on Added Resistance Computation Min-Guk Seo, Dong-Min Park, Jae-Hoon Lee, Kyong-Hwan
International Research Exchange Meeting of Ship and Ocean Engineering in Osaka, December 1-, Osaka, Japan Comparative Study on Added Resistance Computation Min-Guk Seo, Dong-Min Park, Jae-Hoon Lee, Kyong-Hwan
Proceedings of the ASME th International Conference on Ocean, Offshore and Arctic Engineering OMAE2013 June 9-14, 2013, Nantes, France
 Proceedings of the ASME 2011 32th International Conference on Ocean, Offshore and Arctic Engineering OMAE2013 June 9-14, 2013, Nantes, France OMAE2013-10124 APPLYING STRIP THEORY BASED LINEAR SEAKEEPING
Proceedings of the ASME 2011 32th International Conference on Ocean, Offshore and Arctic Engineering OMAE2013 June 9-14, 2013, Nantes, France OMAE2013-10124 APPLYING STRIP THEORY BASED LINEAR SEAKEEPING
Simplified formulas of heave added mass coefficients at high frequency for various two-dimensional bodies in a finite water depth
 csnak, 2015 Int. J. Nav. Archit. Ocean Eng. (2015) 7:115~127 http://dx.doi.org/10.1515/ijnaoe-2015-0009 pissn: 2092-6782, eissn: 2092-6790 Simplified formulas of heave added mass coefficients at high frequency
csnak, 2015 Int. J. Nav. Archit. Ocean Eng. (2015) 7:115~127 http://dx.doi.org/10.1515/ijnaoe-2015-0009 pissn: 2092-6782, eissn: 2092-6790 Simplified formulas of heave added mass coefficients at high frequency
ADDED RESISTANCE IN WAVES OF INTACT AND DAMAGED SHIP IN THE ADRIATIC SEA
 Brodogradnja/Shipbilding Volume 66 Number, 15 Ivana Martić Nastia Degiuli ISSN 7-15X eissn 1845-5859 ADDED RESISTANCE IN WAVES OF INTACT AND DAMAGED SHIP IN THE ADRIATIC SEA Summary UDC 69.5.15.4(6.3)
Brodogradnja/Shipbilding Volume 66 Number, 15 Ivana Martić Nastia Degiuli ISSN 7-15X eissn 1845-5859 ADDED RESISTANCE IN WAVES OF INTACT AND DAMAGED SHIP IN THE ADRIATIC SEA Summary UDC 69.5.15.4(6.3)
ROLL MOTION OF A RORO-SHIP IN IRREGULAR FOLLOWING WAVES
 38 Journal of Marine Science and Technology, Vol. 9, o. 1, pp. 38-44 (2001) ROLL MOTIO OF A RORO-SHIP I IRREGULAR FOLLOWIG WAVES Jianbo Hua* and Wei-Hui Wang** Keywords: roll motion, parametric excitation,
38 Journal of Marine Science and Technology, Vol. 9, o. 1, pp. 38-44 (2001) ROLL MOTIO OF A RORO-SHIP I IRREGULAR FOLLOWIG WAVES Jianbo Hua* and Wei-Hui Wang** Keywords: roll motion, parametric excitation,
Semi-Displacement Vessel Including Applications to Calm-Water Broaching
 Potential-Flow Predictions of a Semi-Displacement Vessel Including pplications to Calm-Water roaching CeSOS Conference 29-May-2013 abak Ommani www.cesos.ntnu.no 29-May-2013, CeSOS Conference CeSOS Centre
Potential-Flow Predictions of a Semi-Displacement Vessel Including pplications to Calm-Water roaching CeSOS Conference 29-May-2013 abak Ommani www.cesos.ntnu.no 29-May-2013, CeSOS Conference CeSOS Centre
Hydrodynamic Forces on Floating Bodies
 Hydrodynamic Forces on Floating Bodies 13.42 Lecture Notes; c A.H. Techet 1. Forces on Large Structures For discussion in this section we will be considering bodies that are quite large compared to the
Hydrodynamic Forces on Floating Bodies 13.42 Lecture Notes; c A.H. Techet 1. Forces on Large Structures For discussion in this section we will be considering bodies that are quite large compared to the
Hydrodynamic analysis and modelling of ships
 Hydrodynamic analysis and modelling of ships Wave loading Harry B. Bingham Section for Coastal, Maritime & Structural Eng. Department of Mechanical Engineering Technical University of Denmark DANSIS møde
Hydrodynamic analysis and modelling of ships Wave loading Harry B. Bingham Section for Coastal, Maritime & Structural Eng. Department of Mechanical Engineering Technical University of Denmark DANSIS møde
SCALE MODEL TESTS OF A FISHING VESSEL IN ROLL MOTION PARAMETRIC RESONANCE
 N. Perez Síntesis Tecnológica. V.3 Nº 1 (26) 33-37 SCALE MODEL TESTS OF A FISHING VESSEL IN ROLL MOTION PARAMETRIC RESONANCE NELSON A. PEREZ M. Instituto de Ciencias Navales y Marítimas, M.Sc, nperez@uach.cl,
N. Perez Síntesis Tecnológica. V.3 Nº 1 (26) 33-37 SCALE MODEL TESTS OF A FISHING VESSEL IN ROLL MOTION PARAMETRIC RESONANCE NELSON A. PEREZ M. Instituto de Ciencias Navales y Marítimas, M.Sc, nperez@uach.cl,
1. Froude Krylov Excitation Force
 .016 Hydrodynamics eading #8.016 Hydrodynamics Prof. A.H. Techet 1. Froude Krylov Ecitation Force Ultimately, if we assume the body to be sufficiently small as not to affect the pressure field due to an
.016 Hydrodynamics eading #8.016 Hydrodynamics Prof. A.H. Techet 1. Froude Krylov Ecitation Force Ultimately, if we assume the body to be sufficiently small as not to affect the pressure field due to an
Application of the open source code Nemoh for modelling of added mass and damping in ship motion simulations
 DEGREE PROJECT IN MECHANICAL ENGINEERING, SECOND CYCLE, 30 CREDITS STOCKHOLM, SWEDEN 2018 Application of the open source code Nemoh for modelling of added mass and damping in ship motion simulations EMIL
DEGREE PROJECT IN MECHANICAL ENGINEERING, SECOND CYCLE, 30 CREDITS STOCKHOLM, SWEDEN 2018 Application of the open source code Nemoh for modelling of added mass and damping in ship motion simulations EMIL
Computational Analysis of Added Resistance in Short Waves
 13 International Research Exchange Meeting of Ship and Ocean Engineering in Osaka -1 December, Osaka, Japan Computational Analysis of Added Resistance in Short Waves Yonghwan Kim, Kyung-Kyu Yang and Min-Guk
13 International Research Exchange Meeting of Ship and Ocean Engineering in Osaka -1 December, Osaka, Japan Computational Analysis of Added Resistance in Short Waves Yonghwan Kim, Kyung-Kyu Yang and Min-Guk
Renewable Energy: Ocean Wave-Energy Conversion
 Renewable Energy: Ocean Wave-Energy Conversion India Institute of Science Bangalore, India 17 June 2011 David R. B. Kraemer, Ph.D. University of Wisconsin Platteville USA B.S.: My background Mechanical
Renewable Energy: Ocean Wave-Energy Conversion India Institute of Science Bangalore, India 17 June 2011 David R. B. Kraemer, Ph.D. University of Wisconsin Platteville USA B.S.: My background Mechanical
Fast computation of the Green function for steady ship wave resistance B. Ponizy", M. Ba", M. Gmlbaud\ F. Noblesse"
 Fast computation of the Green function for steady ship wave resistance B. Ponizy", M. Ba", M. Gmlbaud\ F. Noblesse" Guillaume VII 86684 Poitiers, France ^C.E.A.T., Universite de Poitiers, 4 3 Route de
Fast computation of the Green function for steady ship wave resistance B. Ponizy", M. Ba", M. Gmlbaud\ F. Noblesse" Guillaume VII 86684 Poitiers, France ^C.E.A.T., Universite de Poitiers, 4 3 Route de
WAMIT-MOSES Hydrodynamic Analysis Comparison Study. JRME, July 2000
 - Hydrodynamic Analysis Comparison Study - Hydrodynamic Analysis Comparison Study JRME, Prepared by Hull Engineering Department J. Ray McDermott Engineering, LLC 1 - Hydrodynamic Analysis Comparison Study
- Hydrodynamic Analysis Comparison Study - Hydrodynamic Analysis Comparison Study JRME, Prepared by Hull Engineering Department J. Ray McDermott Engineering, LLC 1 - Hydrodynamic Analysis Comparison Study
The use of a floating quay for container terminals. 1. Introduction
 The use of a floating quay for container terminals. M. van der Wel M.vanderWel@student.tudelft.nl Ir. J.G. de Gijt J.G.deGijt@tudelft.nl Public Works Rotterdam/TU Delft Ir. D. Dudok van Heel D.DudokvanHeel@gw.rotterdam.nl
The use of a floating quay for container terminals. M. van der Wel M.vanderWel@student.tudelft.nl Ir. J.G. de Gijt J.G.deGijt@tudelft.nl Public Works Rotterdam/TU Delft Ir. D. Dudok van Heel D.DudokvanHeel@gw.rotterdam.nl
On the evaluation quadratic forces on stationary bodies
 On the evaluation quadratic forces on stationary bodies Chang-Ho Lee AMIT Inc., Chestnut Hill MA, USA June 9, 006 Abstract. Conservation of momentum is applied to finite fluid volume surrounding a body
On the evaluation quadratic forces on stationary bodies Chang-Ho Lee AMIT Inc., Chestnut Hill MA, USA June 9, 006 Abstract. Conservation of momentum is applied to finite fluid volume surrounding a body
IJEScA. Motions Analysis of a Phinisi Ship Hull with New Strip Method. F. Mahmuddin 1, A. Fitriadhy 2 and S. Dewa 1 ABSTRACT 1.
 Motions Analysis of a Phinisi Ship Hull with New Strip Method ABSTRACT F. Mahmuddin 1, A. Fitriadhy 2 and S. Dewa 1 1 Naval Architecture Department, Engineering Faculty, Hasanuddin University, Indonesia
Motions Analysis of a Phinisi Ship Hull with New Strip Method ABSTRACT F. Mahmuddin 1, A. Fitriadhy 2 and S. Dewa 1 1 Naval Architecture Department, Engineering Faculty, Hasanuddin University, Indonesia
Development of formulas allowing to predict hydrodynamic responses of inland vessels operated within the range of navigation 0.6 Hs 2.
 Gian Carlo Matheus Torres 6 th EMship cycle: October 2015 February 2017 Master Thesis Development of formulas allowing to predict hydrodynamic responses of inland vessels operated within the range of navigation
Gian Carlo Matheus Torres 6 th EMship cycle: October 2015 February 2017 Master Thesis Development of formulas allowing to predict hydrodynamic responses of inland vessels operated within the range of navigation
Optimal Design of FPSO Vessels
 November 2, 201 Optimal Design of FPSO Vessels Ezebuchi Akandu PhD, MTech, BTech, COREN, RINA, MNSE Department of Marine Engineering, Rivers State University, Port Harcourt, Nigeria akandu.ezebuchi@ust.edu.ng
November 2, 201 Optimal Design of FPSO Vessels Ezebuchi Akandu PhD, MTech, BTech, COREN, RINA, MNSE Department of Marine Engineering, Rivers State University, Port Harcourt, Nigeria akandu.ezebuchi@ust.edu.ng
Study on Motions of a Floating Body under Composite External Loads
 137 Study on Motions of a Floating Body under Composite External Loads by Kunihiro Ikegami*, Member Masami Matsuura*, Member Summary In the field of marine engineering, various types of floating bodies
137 Study on Motions of a Floating Body under Composite External Loads by Kunihiro Ikegami*, Member Masami Matsuura*, Member Summary In the field of marine engineering, various types of floating bodies
Trajectory Tracking of a Near-Surface Torpedo using Numerical Methods
 ISSN (Print) : 2347-671 An ISO 3297: 27 Certified Organization Vol.4, Special Issue 12, September 215 Trajectory Tracking of a Near-Surface Torpedo using Numerical Methods Anties K. Martin, Anubhav C.A.,
ISSN (Print) : 2347-671 An ISO 3297: 27 Certified Organization Vol.4, Special Issue 12, September 215 Trajectory Tracking of a Near-Surface Torpedo using Numerical Methods Anties K. Martin, Anubhav C.A.,
Numerical Study of the Roll Decay of Intact and Damaged Ships by Q. Gao and D. Vassalos
 Session 7 Stability of Damaged Ships Numerical Simulation of Progressive Flooding and Capsize Numerical Study of the Roll Decay of Intact and Damaged Ships by Q. Gao and D. Vassalos Qiuxin Gao and Dracos
Session 7 Stability of Damaged Ships Numerical Simulation of Progressive Flooding and Capsize Numerical Study of the Roll Decay of Intact and Damaged Ships by Q. Gao and D. Vassalos Qiuxin Gao and Dracos
DYNAMIC CHARACTERISTICS OF OFFSHORE TENSION LEG PLATFORMS UNDER HYDRODYNAMIC FORCES
 International Journal of Civil Engineering (IJCE) ISSN(P): 2278-9987; ISSN(E): 2278-9995 Vol. 3, Issue 1, Jan 214, 7-16 IASET DYNAMIC CHARACTERISTICS OF OFFSHORE TENSION LEG PLATFORMS UNDER HYDRODYNAMIC
International Journal of Civil Engineering (IJCE) ISSN(P): 2278-9987; ISSN(E): 2278-9995 Vol. 3, Issue 1, Jan 214, 7-16 IASET DYNAMIC CHARACTERISTICS OF OFFSHORE TENSION LEG PLATFORMS UNDER HYDRODYNAMIC
Ship seakeeping in UKC determination a further study on wave force transfer functions
 Scientific Journals Maritime University of Szczecin Zeszyty Naukowe Akademia Morska w Szczecinie, 3() z. pp. 5 5, 3() z. s. 5 5 Ship seakeeping in UKC determination a further study on wave force transfer
Scientific Journals Maritime University of Szczecin Zeszyty Naukowe Akademia Morska w Szczecinie, 3() z. pp. 5 5, 3() z. s. 5 5 Ship seakeeping in UKC determination a further study on wave force transfer
Design, Construction & Operation of LNG/LPG Ships, November, Glasgow, UK
 Design, Construction & Operation of LNG/LPG Ships, 29-3 November, Glasgow, UK SLOSHING AND SWIRLING IN MEMBRANE LNG TANKS AND THEIR COUPLING EFFECTS WITH SHIP MOTION M Arai and G M Karuka, Yokohama National
Design, Construction & Operation of LNG/LPG Ships, 29-3 November, Glasgow, UK SLOSHING AND SWIRLING IN MEMBRANE LNG TANKS AND THEIR COUPLING EFFECTS WITH SHIP MOTION M Arai and G M Karuka, Yokohama National
Estimating Maneuvering and Seakeeping Characteristics with Neural Networks
 070131-071 1 Estimating Maneuvering and Seakeeping Characteristics with Neural Networks Paulo Triunfante Martins 1, Victor Lobo 2, Member, IEEE Maneuvering and seakeeping are two very important naval architecture
070131-071 1 Estimating Maneuvering and Seakeeping Characteristics with Neural Networks Paulo Triunfante Martins 1, Victor Lobo 2, Member, IEEE Maneuvering and seakeeping are two very important naval architecture
13.42 LECTURE 13: FLUID FORCES ON BODIES. Using a two dimensional cylinder within a two-dimensional flow we can demonstrate some of the principles
 13.42 LECTURE 13: FLUID FORCES ON BODIES SPRING 2003 c A. H. TECHET & M.S. TRIANTAFYLLOU 1. Morrison s Equation Using a two dimensional cylinder within a two-dimensional flow we can demonstrate some of
13.42 LECTURE 13: FLUID FORCES ON BODIES SPRING 2003 c A. H. TECHET & M.S. TRIANTAFYLLOU 1. Morrison s Equation Using a two dimensional cylinder within a two-dimensional flow we can demonstrate some of
INVESTIGATION OF MOTIONS OF CATAMARANS IN REGULAR WAVES II
 Pergaoion cean Engng, Vol. 24, No. 10, pp. 949-966, 1997 1997 Elsevier Science Ltd. All rights reserved Printed in Great Britain 0029-8018/97 $17.00 + 0.00 PII: S0029-8018(97)00056-X INVESTIGATIN F MTINS
Pergaoion cean Engng, Vol. 24, No. 10, pp. 949-966, 1997 1997 Elsevier Science Ltd. All rights reserved Printed in Great Britain 0029-8018/97 $17.00 + 0.00 PII: S0029-8018(97)00056-X INVESTIGATIN F MTINS
Time-Domain Calculations of Drift Forces and Moments. Henk Prins
 Time-Domain Calculations of Drift Forces and Moments Henk Prins Time-Domain Calculations of Drift Forces and Moments Tijdsdomein Berekeningen van Drift Krachten en Momenten PROEFSCHRIFT ter verkrijging
Time-Domain Calculations of Drift Forces and Moments Henk Prins Time-Domain Calculations of Drift Forces and Moments Tijdsdomein Berekeningen van Drift Krachten en Momenten PROEFSCHRIFT ter verkrijging
Simple Estimation of Wave Added Resistance from Experiments in Transient and Irregular Water Waves
 Simple Estimation of Wave Added Resistance from Experiments in Transient and Irregular Water Waves by Tsugukiyo Hirayama*, Member Xuefeng Wang*, Member Summary Experiments in transient water waves are
Simple Estimation of Wave Added Resistance from Experiments in Transient and Irregular Water Waves by Tsugukiyo Hirayama*, Member Xuefeng Wang*, Member Summary Experiments in transient water waves are
NUMERICAL ANALYSIS OF A FLOATING HARBOR SYSTEM AND COMPARISON WITH EXPERIMENTAL RESULTS. A Thesis HEONYONG KANG
 NUMERICAL ANALYSIS OF A FLOATING HARBOR SYSTEM AND COMPARISON WITH EXPERIMENTAL RESULTS A Thesis by HEONYONG KANG Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment
NUMERICAL ANALYSIS OF A FLOATING HARBOR SYSTEM AND COMPARISON WITH EXPERIMENTAL RESULTS A Thesis by HEONYONG KANG Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment
Coupled Heave-Pitch Motions and Froude Krylov Excitation Forces
 Coupled Heave-Pitch Motions and Froude Krylov Excitation Forces 13.42 Lecture Notes; Spring 2004; c A.H. Techet 1. Coupled Equation of Motion in Heave and Pitch Once we have set up the simple equation
Coupled Heave-Pitch Motions and Froude Krylov Excitation Forces 13.42 Lecture Notes; Spring 2004; c A.H. Techet 1. Coupled Equation of Motion in Heave and Pitch Once we have set up the simple equation
Hull-tether-riser dynamics of deep water tension leg platforms
 Fluid Structure Interaction V 15 Hull-tether-riser dynamics of deep water tension leg platforms R. Jayalekshmi 1, R. Sundaravadivelu & V. G. Idichandy 1 Department of Civil Engineering, NSS College of
Fluid Structure Interaction V 15 Hull-tether-riser dynamics of deep water tension leg platforms R. Jayalekshmi 1, R. Sundaravadivelu & V. G. Idichandy 1 Department of Civil Engineering, NSS College of
Fundamentals of Fluid Dynamics: Waves in Fluids
 Fundamentals of Fluid Dynamics: Waves in Fluids Introductory Course on Multiphysics Modelling TOMASZ G. ZIELIŃSKI (after: D.J. ACHESON s Elementary Fluid Dynamics ) bluebox.ippt.pan.pl/ tzielins/ Institute
Fundamentals of Fluid Dynamics: Waves in Fluids Introductory Course on Multiphysics Modelling TOMASZ G. ZIELIŃSKI (after: D.J. ACHESON s Elementary Fluid Dynamics ) bluebox.ippt.pan.pl/ tzielins/ Institute
RANS Computational Fluid Dynamics Predictions of Pitch and Heave Ship Motions in Head Seas
 Journal of Ship Research, Vol. 49, No. 2, June 2005, pp. 80 97 RANS Computational Fluid Dynamics Predictions of Pitch and Heave Ship Motions in Head Seas Gabriel David Weymouth, Robert Vance Wilson, and
Journal of Ship Research, Vol. 49, No. 2, June 2005, pp. 80 97 RANS Computational Fluid Dynamics Predictions of Pitch and Heave Ship Motions in Head Seas Gabriel David Weymouth, Robert Vance Wilson, and
( ) Chapter 3: Free Vibration of the Breakwater. 3.1 Introduction
 Chapter 3: Free Vibration of the Breakwater. 3.1 Introduction") Chapter : Free Vibration of the Breakwater. Introduction Before conducting forcing analyses on the breakwater, a free vibration study is necessary. This chapter will describe the analysis conducted to
Chapter : Free Vibration of the Breakwater. Introduction Before conducting forcing analyses on the breakwater, a free vibration study is necessary. This chapter will describe the analysis conducted to
Research and application of 2-D water entry simulation (constant velocity)
") Research and application of 2-D water entry simulation (constant velocity) College of Shipbuilding and Engineering Harbin Engineering University ------------- Zhu Xin Supervisor: Prof. Duan Wen-yang 1
Research and application of 2-D water entry simulation (constant velocity) College of Shipbuilding and Engineering Harbin Engineering University ------------- Zhu Xin Supervisor: Prof. Duan Wen-yang 1
Seakeeping of Ships. { ζ + a } 3 ζ 3, ζ = ξ + i η (1)
") Seakeeping of Ships By Professor Masashi KASHIWAGI Problem Set: No. Date: 27 January 2010 Due: 28 February 2010 By using the computer program (iem2d.f) for the boundary-element (Green function) method
Seakeeping of Ships By Professor Masashi KASHIWAGI Problem Set: No. Date: 27 January 2010 Due: 28 February 2010 By using the computer program (iem2d.f) for the boundary-element (Green function) method
Theory of Ship Waves (Wave-Body Interaction Theory) Quiz No. 2, April 25, 2018
 Quiz No. 2, April 25, 2018") Quiz No. 2, April 25, 2018 (1) viscous effects (2) shear stress (3) normal pressure (4) pursue (5) bear in mind (6) be denoted by (7) variation (8) adjacent surfaces (9) be composed of (10) integrand (11)
Quiz No. 2, April 25, 2018 (1) viscous effects (2) shear stress (3) normal pressure (4) pursue (5) bear in mind (6) be denoted by (7) variation (8) adjacent surfaces (9) be composed of (10) integrand (11)
Review of Fundamental Equations Supplementary notes on Section 1.2 and 1.3
 Review of Fundamental Equations Supplementary notes on Section. and.3 Introduction of the velocity potential: irrotational motion: ω = u = identity in the vector analysis: ϕ u = ϕ Basic conservation principles:
Review of Fundamental Equations Supplementary notes on Section. and.3 Introduction of the velocity potential: irrotational motion: ω = u = identity in the vector analysis: ϕ u = ϕ Basic conservation principles:
Numerical modelling and simulation of. floating oil storage tanks considering the. sloshing effect
 Numerical modelling and simulation of floating oil storage tanks considering the sloshing effect Xiao Liu June 2017 Master Thesis Department of Marine Technology Norwegian University of Science and Technology
Numerical modelling and simulation of floating oil storage tanks considering the sloshing effect Xiao Liu June 2017 Master Thesis Department of Marine Technology Norwegian University of Science and Technology
Radiation and diffraction of a submerged sphere
 Radiation and diffraction of a submerged sphere S. H. Mousavizadeganl, M. Rahman2 & M. G. Satish3 'Dept. of Mechanical Engineering, Dalhousie University, Canada 2Dept. of Engineering Mathematics, Dalhousie
Radiation and diffraction of a submerged sphere S. H. Mousavizadeganl, M. Rahman2 & M. G. Satish3 'Dept. of Mechanical Engineering, Dalhousie University, Canada 2Dept. of Engineering Mathematics, Dalhousie
Department of Aerospace and Ocean Engineering Graduate Study Specialization in Ocean Engineering. Written Preliminary Examination Information
 Department of Aerospace and Ocean Engineering Graduate Study Specialization in Ocean Engineering Written Preliminary Examination Information Faculty: Professors W. Neu, O. Hughes, A. Brown, M. Allen Test
Department of Aerospace and Ocean Engineering Graduate Study Specialization in Ocean Engineering Written Preliminary Examination Information Faculty: Professors W. Neu, O. Hughes, A. Brown, M. Allen Test
INFLUENCE OF TETHER LENGTH IN THE RESPONSE BEHAVIOR OF SQUARE TENSION LEG PLATFORM IN REGULAR WAVES
 INFLUENCE OF TETHER LENGTH IN THE RESPONSE BEHAVIOR OF SQUARE TENSION LEG PLATFOR IN REGULAR WAVES 1 Amr R. El-gamal, 2 Ashraf Essa, 1 Faculty of Engineering, Benha Univ., Egypt, 2 Associated prof., National
INFLUENCE OF TETHER LENGTH IN THE RESPONSE BEHAVIOR OF SQUARE TENSION LEG PLATFOR IN REGULAR WAVES 1 Amr R. El-gamal, 2 Ashraf Essa, 1 Faculty of Engineering, Benha Univ., Egypt, 2 Associated prof., National
DEVELOPMENT OF A COMPUTER PROGRAM FOR THREE DIMENSIONAL FREQUENCY DOMAIN ANALYSIS OF ZERO SPEED FIRST ORDER WAVE BODY INTERACTION.
 DEVELOPMENT OF A COMPUTER PROGRAM FOR THREE DIMENSIONAL FREQUENCY DOMAIN ANALYSIS OF ZERO SPEED FIRST ORDER WAVE BODY INTERACTION A Thesis by AMITAVA GUHA Submitted to the Office of Graduate Studies of
DEVELOPMENT OF A COMPUTER PROGRAM FOR THREE DIMENSIONAL FREQUENCY DOMAIN ANALYSIS OF ZERO SPEED FIRST ORDER WAVE BODY INTERACTION A Thesis by AMITAVA GUHA Submitted to the Office of Graduate Studies of
A simplified method for calculating propeller thrust decrease for a ship sailing on a given shipping lane
 POLISH MARITIME RESEARCH 2(82) 2014 Vol 21; pp. 27-33 10.2478/pomr-2014-0015 A simplified method for calculating propeller thrust decrease for a ship sailing on a given shipping lane Katarzyna Zelazny,
POLISH MARITIME RESEARCH 2(82) 2014 Vol 21; pp. 27-33 10.2478/pomr-2014-0015 A simplified method for calculating propeller thrust decrease for a ship sailing on a given shipping lane Katarzyna Zelazny,
SIMPLIFICATION BY MATHEMATIC MODEL TO SOLVE THE EXPERIMENTAL OF SLOSHING EFFECT ON THE FPSO VESSEL
 European International Journal of Science and Technology Vol. 3 No. 5 June, 2014 SIMPLIFICATION BY MATHEMATIC MODEL TO SOLVE THE EXPERIMENTAL OF SLOSHING EFFECT ON THE FPSO VESSEL LuhutTumpalParulianSinaga
European International Journal of Science and Technology Vol. 3 No. 5 June, 2014 SIMPLIFICATION BY MATHEMATIC MODEL TO SOLVE THE EXPERIMENTAL OF SLOSHING EFFECT ON THE FPSO VESSEL LuhutTumpalParulianSinaga
Evaluation of Hydrodynamic Performance of a Damaged Ship in Waves
 Evaluation of Hydrodynamic Performance of a Damaged Ship in Waves Sa Young Hong, Seok-Kyu Cho, Byoung Wan Kim, Gyeong Jung Lee, Ki-Sup Kim Maritime and Ocean Engineering Research Institute/KORDI, Daejeon,
Evaluation of Hydrodynamic Performance of a Damaged Ship in Waves Sa Young Hong, Seok-Kyu Cho, Byoung Wan Kim, Gyeong Jung Lee, Ki-Sup Kim Maritime and Ocean Engineering Research Institute/KORDI, Daejeon,
MODELLING RECURRENCE MOTION OF A LARGE VOLUME SEMI- SUBMERSIBLE
 Jurnal Mekanikal December 2012, No 35, 13-27 MODELLING RECURRENCE MOTION OF A LARGE VOLUME SEMI- SUBMERSIBLE Agoes Priyanto *, Adi Maimun and Dwi Putra Rishandi Faculty of Mechanical Engineering, Universiti
Jurnal Mekanikal December 2012, No 35, 13-27 MODELLING RECURRENCE MOTION OF A LARGE VOLUME SEMI- SUBMERSIBLE Agoes Priyanto *, Adi Maimun and Dwi Putra Rishandi Faculty of Mechanical Engineering, Universiti
Effect of Tethers Tension Force in the Behavior of a Tension Leg Platform Subjected to Hydrodynamic Force Amr R. El-Gamal, Ashraf Essa, Ayman Ismail
 Vol:7, No:1, 13 Effect of Tethers Tension Force in the Behavior of a Tension Leg Platform Subjected to Hydrodynamic Force Amr R. El-Gamal, Ashraf Essa, Ayman Ismail International Science Index, Bioengineering
Vol:7, No:1, 13 Effect of Tethers Tension Force in the Behavior of a Tension Leg Platform Subjected to Hydrodynamic Force Amr R. El-Gamal, Ashraf Essa, Ayman Ismail International Science Index, Bioengineering
COMPUTATION OF ADDED MASS AND DAMPING COEFFICIENTS DUE TO A HEAVING CYLINDER
 J. Appl. Math. & Computing Vol. 3(007), No. 1 -, pp. 17-140 Website: http://jamc.net COMPUTATION OF ADDED MASS AND DAMPING COEFFICIENTS DUE TO A HEAVING CYLINDER DAMBARU D BHATTA Abstract. We present the
J. Appl. Math. & Computing Vol. 3(007), No. 1 -, pp. 17-140 Website: http://jamc.net COMPUTATION OF ADDED MASS AND DAMPING COEFFICIENTS DUE TO A HEAVING CYLINDER DAMBARU D BHATTA Abstract. We present the
IDENTIFICATION OF SHIP PROPELLER TORSIONAL VIBRATIONS
 Journal of KONES Powertrain and Transport, Vol., No. 015 IDENTIFICATION OF SHIP PROPELLER TORSIONAL VIBRATIONS Jan Rosłanowski Gdynia Maritime University, Faculty of Marine Engineering Morska Street 81-87,
Journal of KONES Powertrain and Transport, Vol., No. 015 IDENTIFICATION OF SHIP PROPELLER TORSIONAL VIBRATIONS Jan Rosłanowski Gdynia Maritime University, Faculty of Marine Engineering Morska Street 81-87,
SEAKEEPING FOR THE T-CRAFT USING LINEAR POTENTIAL AND NONLINEAR DYNAMIC METHODS. A Thesis JOHN CHRISTIAN BANDAS
 SEAKEEPING FOR THE T-CRAFT USING LINEAR POTENTIAL AND NONLINEAR DYNAMIC METHODS A Thesis by JOHN CHRISTIAN BANDAS Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment
SEAKEEPING FOR THE T-CRAFT USING LINEAR POTENTIAL AND NONLINEAR DYNAMIC METHODS A Thesis by JOHN CHRISTIAN BANDAS Submitted to the Office of Graduate Studies of Texas A&M University in partial fulfillment
Student name: This is a closed book examination. You are allowed 1 sheet of 8.5 x 11 paper with notes.
 13.012 Marine Hydrodynamics for Ocean Engineers Fall 2004 Quiz #2 Student name: This is a closed book examination. You are allowed 1 sheet of 8.5 x 11 paper with notes. For the problems in Section A, fill
13.012 Marine Hydrodynamics for Ocean Engineers Fall 2004 Quiz #2 Student name: This is a closed book examination. You are allowed 1 sheet of 8.5 x 11 paper with notes. For the problems in Section A, fill
MAE 101A. Homework 7 - Solutions 3/12/2018
 MAE 101A Homework 7 - Solutions 3/12/2018 Munson 6.31: The stream function for a two-dimensional, nonviscous, incompressible flow field is given by the expression ψ = 2(x y) where the stream function has
MAE 101A Homework 7 - Solutions 3/12/2018 Munson 6.31: The stream function for a two-dimensional, nonviscous, incompressible flow field is given by the expression ψ = 2(x y) where the stream function has
A Discussion About Seakeeping and Manoeuvring Models For Surface Vessels
 A Discussion About Seakeeping and Manoeuvring Models For Surface Vessels Tristan Perez, Thor I. Fossen and Asgeir Sørensen Technical Report (MSS-TR-001) Marine System Simulator (MSS) Group (http://www.cesos.ntnu.no/mss/)
A Discussion About Seakeeping and Manoeuvring Models For Surface Vessels Tristan Perez, Thor I. Fossen and Asgeir Sørensen Technical Report (MSS-TR-001) Marine System Simulator (MSS) Group (http://www.cesos.ntnu.no/mss/)
Final Exam TTK4190 Guidance and Control
 Trondheim Department of engineering Cybernetics Contact person: Professor Thor I. Fossen Phone: 73 59 43 61 Cell: 91 89 73 61 Email: tif@itk.ntnu.no Final Exam TTK4190 Guidance and Control Friday May 15,
Trondheim Department of engineering Cybernetics Contact person: Professor Thor I. Fossen Phone: 73 59 43 61 Cell: 91 89 73 61 Email: tif@itk.ntnu.no Final Exam TTK4190 Guidance and Control Friday May 15,
Prediction of Semi-Submersible s Motion Response by Using Diffraction Potential Theory and Heave Viscous Damping Correction
 Jurnal Teknologi Full paper Prediction of Semi-Submersible s Motion Response by Using Diffraction Potential Theory and Heave Viscous Damping Correction C. L. Siow a, Jaswar Koto a,b*, Hassan Abby c, N.
Jurnal Teknologi Full paper Prediction of Semi-Submersible s Motion Response by Using Diffraction Potential Theory and Heave Viscous Damping Correction C. L. Siow a, Jaswar Koto a,b*, Hassan Abby c, N.
NONLINEAR BEHAVIOR OF A SINGLE- POINT MOORING SYSTEM FOR FLOATING OFFSHORE WIND TURBINE
 NONLINEAR BEHAVIOR OF A SINGLE- POINT MOORING SYSTEM FOR FLOATING OFFSHORE WIND TURBINE Ma Chong, Iijima Kazuhiro, Masahiko Fujikubo Dept. of Naval Architecture and Ocean Engineering OSAKA UNIVERSITY RESEARCH
NONLINEAR BEHAVIOR OF A SINGLE- POINT MOORING SYSTEM FOR FLOATING OFFSHORE WIND TURBINE Ma Chong, Iijima Kazuhiro, Masahiko Fujikubo Dept. of Naval Architecture and Ocean Engineering OSAKA UNIVERSITY RESEARCH
Review on Vortex-Induced Vibration for Wave Propagation Class
 Review on Vortex-Induced Vibration for Wave Propagation Class By Zhibiao Rao What s Vortex-Induced Vibration? In fluid dynamics, vortex-induced vibrations (VIV) are motions induced on bodies interacting
Review on Vortex-Induced Vibration for Wave Propagation Class By Zhibiao Rao What s Vortex-Induced Vibration? In fluid dynamics, vortex-induced vibrations (VIV) are motions induced on bodies interacting
Den Danske Maritime Fond projekt: , DTU Mek; Post Doc, udvikling af software The Final Report. Report. Mostafa Amini Afshar Harry Bingham
 Den Danske Maritime Fond projekt: 4-88, DTU Mek; Post Doc, udvikling af software The Final Report Report Mostafa Amini Afshar Harry Bingham Contents Project summary.......................................
Den Danske Maritime Fond projekt: 4-88, DTU Mek; Post Doc, udvikling af software The Final Report Report Mostafa Amini Afshar Harry Bingham Contents Project summary.......................................
Investigation of ship maneuvering with hydrodynamic effects between ship and bank
 Journal of Mechanical Science and Technology Journal of Mechanical Science and Technology (8) 3~36 www.springerlink.com/content/738-494 Investigation of ship maneuvering with hydrodynamic effects between
Journal of Mechanical Science and Technology Journal of Mechanical Science and Technology (8) 3~36 www.springerlink.com/content/738-494 Investigation of ship maneuvering with hydrodynamic effects between
Professor T.S. Jang. Naval Architecture and Ocean Engineering Naval Architecture and Ocean Engineering
 Professor T.S. Jang E-mail: taek@pusan.ac.kr Homepage: http://home.pusan.ac.kr/~wave Laboratory: Ocean Engineering Laboratory (http://jang.pusan.ac.kr/) Affiliation: Naval Architecture and Ocean Engineering,
Professor T.S. Jang E-mail: taek@pusan.ac.kr Homepage: http://home.pusan.ac.kr/~wave Laboratory: Ocean Engineering Laboratory (http://jang.pusan.ac.kr/) Affiliation: Naval Architecture and Ocean Engineering,
Semi-Submersible Heave Response Study Using Diffraction Potential Theory with Viscous Damping Correction
 Semi-Submersible Heave Response Study Using Diffraction Potential Theory with Viscous Damping Correction a) Mechanical Engineering, Universiti Teknologi Malaysia b) Ocean and Aerospace Research Institute,
Semi-Submersible Heave Response Study Using Diffraction Potential Theory with Viscous Damping Correction a) Mechanical Engineering, Universiti Teknologi Malaysia b) Ocean and Aerospace Research Institute,
Theoretical Review on Prediction of Motion Response using Diffraction Potential and Morison
 Theoretical Review on Prediction of Motion Response using Diffraction Potential and Morison C.L.Siow, a, J. Koto, a,b,*, H.Yasukawa, c A.Matsuda, d D.Terada, d, C. Guedes Soares, e a) Department of Aeronautics,
Theoretical Review on Prediction of Motion Response using Diffraction Potential and Morison C.L.Siow, a, J. Koto, a,b,*, H.Yasukawa, c A.Matsuda, d D.Terada, d, C. Guedes Soares, e a) Department of Aeronautics,
ASSESSMENT OF STRESS CONCENTRATIONS IN LARGE CONTAINER SHIPS USING BEAM HYDROELASTIC MODEL
 ASSESSMENT OF STRESS CONCENTRATIONS IN LARGE CONTAINER SHIPS USING BEAM HYDROELASTIC MODEL Ivo Senjanović, Nikola Vladimir Faculty of Mechanical Engineering and Naval Architecture, University of Zagreb,
ASSESSMENT OF STRESS CONCENTRATIONS IN LARGE CONTAINER SHIPS USING BEAM HYDROELASTIC MODEL Ivo Senjanović, Nikola Vladimir Faculty of Mechanical Engineering and Naval Architecture, University of Zagreb,
Strongly nonlinear long gravity waves in uniform shear flows
 Strongly nonlinear long gravity waves in uniform shear flows Wooyoung Choi Department of Naval Architecture and Marine Engineering, University of Michigan, Ann Arbor, Michigan 48109, USA Received 14 January
Strongly nonlinear long gravity waves in uniform shear flows Wooyoung Choi Department of Naval Architecture and Marine Engineering, University of Michigan, Ann Arbor, Michigan 48109, USA Received 14 January
Ship structure dynamic analysis - effects of made assumptions on computation results
 Ship structure dynamic analysis - effects of made assumptions on computation results Lech Murawski Centrum Techniki Okrętowej S. A. (Ship Design and Research Centre) ABSTRACT The paper presents identification
Ship structure dynamic analysis - effects of made assumptions on computation results Lech Murawski Centrum Techniki Okrętowej S. A. (Ship Design and Research Centre) ABSTRACT The paper presents identification
A COMPUTATIONALLY EFFICIENT METHOD FOR NONLINEAR MULTIHULL SEAKEEPING
 A COMPUTATIONALLY EFFICIENT METHOD FOR NONLINEAR MULTIHULL SEAKEEPING by William F. Belnap A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Naval
A COMPUTATIONALLY EFFICIENT METHOD FOR NONLINEAR MULTIHULL SEAKEEPING by William F. Belnap A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy (Naval
OCEAN WAVES AND OSCILLATING SYSTEMS
 OCEAN WAVES AND OSCILLATING SYSTEMS LINEAR INTERACTIONS INCLUDING WAVE-ENERGY EXTRACTION JOHANNES FALNES Department of Physics Norwegian University of Science and Technology NTNU CAMBRIDGE UNIVERSITY PRESS
OCEAN WAVES AND OSCILLATING SYSTEMS LINEAR INTERACTIONS INCLUDING WAVE-ENERGY EXTRACTION JOHANNES FALNES Department of Physics Norwegian University of Science and Technology NTNU CAMBRIDGE UNIVERSITY PRESS
Time dependent singularities in incompressible potential flow
 Time dependent singularities in incompressible potential flow Daniel Weihs Department of Aerospace Engineering and Autonomous Systems Program Technion, Haifa 32000, Israel Abstract The flow-field resulting
Time dependent singularities in incompressible potential flow Daniel Weihs Department of Aerospace Engineering and Autonomous Systems Program Technion, Haifa 32000, Israel Abstract The flow-field resulting
CE MECHANICS OF FLUIDS
 CE60 - MECHANICS OF FLUIDS (FOR III SEMESTER) UNIT II FLUID STATICS & KINEMATICS PREPARED BY R.SURYA, M.E Assistant Professor DEPARTMENT OF CIVIL ENGINEERING DEPARTMENT OF CIVIL ENGINEERING SRI VIDYA COLLEGE
CE60 - MECHANICS OF FLUIDS (FOR III SEMESTER) UNIT II FLUID STATICS & KINEMATICS PREPARED BY R.SURYA, M.E Assistant Professor DEPARTMENT OF CIVIL ENGINEERING DEPARTMENT OF CIVIL ENGINEERING SRI VIDYA COLLEGE
THE LINEAR NUMERICAL ANALYSIS OF DISPLACEMENT RESPONSE AMPLITUDE OPERATOR, BASED ON THE HYDROELASTICITY THEORY, FOR A BARGE TEST SHIP
 APPIED PHYSICS MECHANICS THE INEAR NUMERICA ANAYSIS OF DISPACEMENT RESPONSE AMPITUDE OPERATOR, BASED ON THE HYDROEASTICITY THEORY, FOR A BARGE TEST SHIP EONARD DOMNIªORU 1, IVIU STOICESCU 1, DANIEA DOMNIªORU
APPIED PHYSICS MECHANICS THE INEAR NUMERICA ANAYSIS OF DISPACEMENT RESPONSE AMPITUDE OPERATOR, BASED ON THE HYDROEASTICITY THEORY, FOR A BARGE TEST SHIP EONARD DOMNIªORU 1, IVIU STOICESCU 1, DANIEA DOMNIªORU
Mooring Model for Barge Tows in Lock Chamber
 Mooring Model for Barge Tows in Lock Chamber by Richard L. Stockstill BACKGROUND: Extensive research has been conducted in the area of modeling mooring systems in sea environments where the forcing function
Mooring Model for Barge Tows in Lock Chamber by Richard L. Stockstill BACKGROUND: Extensive research has been conducted in the area of modeling mooring systems in sea environments where the forcing function
NONLINEAR DYNAMICS ON PARAMETRIC ROLL RESONANCE WITH REALISTIC NUMERICAL MODELLING
 8 th International Conference on 81 NONLINEAR DYNAMICS ON PARAMETRIC ROLL RESONANCE WITH REALISTIC NUMERICAL MODELLING Naoya Umeda*, Hirotada Hashimoto*, Dracos Vassalos**, Shinichi Urano* and Kenji Okou*
8 th International Conference on 81 NONLINEAR DYNAMICS ON PARAMETRIC ROLL RESONANCE WITH REALISTIC NUMERICAL MODELLING Naoya Umeda*, Hirotada Hashimoto*, Dracos Vassalos**, Shinichi Urano* and Kenji Okou*
Ship Nonlinear Rolling and Roll Angle Reconstruction Based on FIR
 Open Access Library Journal Ship Nonlinear Rolling and Roll Angle Reconstruction Based on FIR Jianhui Lu 1,2*, Chunlei Zhang 2, Shaonan Chen 2, Yunxia Wu 2 1 Shandong Province Key Laboratory of Ocean Engineering,
Open Access Library Journal Ship Nonlinear Rolling and Roll Angle Reconstruction Based on FIR Jianhui Lu 1,2*, Chunlei Zhang 2, Shaonan Chen 2, Yunxia Wu 2 1 Shandong Province Key Laboratory of Ocean Engineering,
NUMERICAL MODELLING AND STUDY OF PARAMETRIC ROLLING FOR C11 CONTAINERSHIP IN REGULAR HEAD SEAS USING CONSISTENT STRIP THEORY
 Brodogradnja/Shipbuilding/Open access Volume 68 Number 3, 217 Kaiye HU Rui WANG Shan MA Wenyang DUAN Wenhao XU Rui DENG http://dx.doi.org/1.21278/brod6839 ISSN 7-215X eissn 185-5859 NUMERICAL MODELLING
Brodogradnja/Shipbuilding/Open access Volume 68 Number 3, 217 Kaiye HU Rui WANG Shan MA Wenyang DUAN Wenhao XU Rui DENG http://dx.doi.org/1.21278/brod6839 ISSN 7-215X eissn 185-5859 NUMERICAL MODELLING
A coupled hydrodynamic/structural model for ship/ramp/barge interface
 Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection - A coupled hydrodynamic/structural model for ship/ramp/barge interface Dalakos, Antonios. Monterey, California. Naval
Calhoun: The NPS Institutional Archive Theses and Dissertations Thesis Collection - A coupled hydrodynamic/structural model for ship/ramp/barge interface Dalakos, Antonios. Monterey, California. Naval
A numerical investigation of second-order difference-frequency forces and motions of a moored ship in shallow water
 J. Ocean Eng. Mar. Energy (205) :57 79 DOI 0.007/s40722-05-004-6 RESEARCH ARTICLE A numerical investigation of second-order difference-frequency forces and motions of a moored ship in shallow water Jikun
J. Ocean Eng. Mar. Energy (205) :57 79 DOI 0.007/s40722-05-004-6 RESEARCH ARTICLE A numerical investigation of second-order difference-frequency forces and motions of a moored ship in shallow water Jikun
Numerical comparison of two boundary meshless methods for water wave problems
 Boundary Elements and Other Mesh Reduction Methods XXXVI 115 umerical comparison of two boundary meshless methods for water wave problems Zatianina Razafizana 1,2, Wen Chen 2 & Zhuo-Jia Fu 2 1 College
Boundary Elements and Other Mesh Reduction Methods XXXVI 115 umerical comparison of two boundary meshless methods for water wave problems Zatianina Razafizana 1,2, Wen Chen 2 & Zhuo-Jia Fu 2 1 College
The effect of disturbances on the flows under a sluice gate and past an inclined plate
 J. Fluid Mech. (7), vol. 576, pp. 475 49. c 7 Cambridge University Press doi:.7/s7486 Printed in the United Kingdom 475 The effect of disturbances on the flows under a sluice gate and past an inclined
J. Fluid Mech. (7), vol. 576, pp. 475 49. c 7 Cambridge University Press doi:.7/s7486 Printed in the United Kingdom 475 The effect of disturbances on the flows under a sluice gate and past an inclined
Gian Carlo Matheus Torres
 Development of simplified formulas to determine wave induced loads on inland vessels operated in stretches of water within the range of navigation IN(0.6 x 2) Master Thesis presented in partial fulfillment
Development of simplified formulas to determine wave induced loads on inland vessels operated in stretches of water within the range of navigation IN(0.6 x 2) Master Thesis presented in partial fulfillment
Kelvin Helmholtz Instability
 Kelvin Helmholtz Instability A. Salih Department of Aerospace Engineering Indian Institute of Space Science and Technology, Thiruvananthapuram November 00 One of the most well known instabilities in fluid
Kelvin Helmholtz Instability A. Salih Department of Aerospace Engineering Indian Institute of Space Science and Technology, Thiruvananthapuram November 00 One of the most well known instabilities in fluid
OPTIMIZING WAVE FARM LAYOUTS UNDER UNCERTAINTY
 Proceedings of the 3 rd Marine Energy Technology Symposium METS April 7-9,, Washington, D.C. OPTIMIZING WAVE FARM LAYOUTS UNDER UNCERTAINTY Lawrence V. Snyder Dept. of Industrial and Systems Engr. Lehigh
Proceedings of the 3 rd Marine Energy Technology Symposium METS April 7-9,, Washington, D.C. OPTIMIZING WAVE FARM LAYOUTS UNDER UNCERTAINTY Lawrence V. Snyder Dept. of Industrial and Systems Engr. Lehigh
SAMPLE CHAPTERS UNESCO EOLSS WAVES IN THE OCEANS. Wolfgang Fennel Institut für Ostseeforschung Warnemünde (IOW) an der Universität Rostock,Germany
 an der Universität Rostock,Germany") WAVES IN THE OCEANS Wolfgang Fennel Institut für Ostseeforschung Warnemünde (IOW) an der Universität Rostock,Germany Keywords: Wind waves, dispersion, internal waves, inertial oscillations, inertial waves,
WAVES IN THE OCEANS Wolfgang Fennel Institut für Ostseeforschung Warnemünde (IOW) an der Universität Rostock,Germany Keywords: Wind waves, dispersion, internal waves, inertial oscillations, inertial waves,
Overview of BV R&D activities in Marine Hydrodynamics
 Overview of BV R&D activities in Marine Hydrodynamics Special attention to hydro-structure interactions Šime Malenica Bureau Veritas Marine & Offshore Division Research Department Harbin, 29th of June
Overview of BV R&D activities in Marine Hydrodynamics Special attention to hydro-structure interactions Šime Malenica Bureau Veritas Marine & Offshore Division Research Department Harbin, 29th of June
Offshore Hydromechanics Module 1
 Offshore Hydromechanics Module 1 Dr. ir. Pepijn de Jong 4. Potential Flows part 2 Introduction Topics of Module 1 Problems of interest Chapter 1 Hydrostatics Chapter 2 Floating stability Chapter 2 Constant
Offshore Hydromechanics Module 1 Dr. ir. Pepijn de Jong 4. Potential Flows part 2 Introduction Topics of Module 1 Problems of interest Chapter 1 Hydrostatics Chapter 2 Floating stability Chapter 2 Constant
Aalto University School of Engineering
 Aalto University School of Engineering Kul-24.4140 Ship Dynamics (P) Lecture 9 Loads Where is this lecture on the course? Design Framework Lecture 5: Equations of Motion Environment Lecture 6: Strip Theory
Aalto University School of Engineering Kul-24.4140 Ship Dynamics (P) Lecture 9 Loads Where is this lecture on the course? Design Framework Lecture 5: Equations of Motion Environment Lecture 6: Strip Theory
Surface Tension Effect on a Two Dimensional. Channel Flow against an Inclined Wall
 Applied Mathematical Sciences, Vol. 1, 007, no. 7, 313-36 Surface Tension Effect on a Two Dimensional Channel Flow against an Inclined Wall A. Merzougui *, H. Mekias ** and F. Guechi ** * Département de
Applied Mathematical Sciences, Vol. 1, 007, no. 7, 313-36 Surface Tension Effect on a Two Dimensional Channel Flow against an Inclined Wall A. Merzougui *, H. Mekias ** and F. Guechi ** * Département de
Wave Driven Free Surface Motion in the Gap between a Tanker and an FLNG Barge
 Wave Driven Free Surface Motion in the Gap between a Tanker and an FLNG Barge L. Sun a, R. Eatock Taylor a,b and P. H. Taylor b a Centre for Offshore Research & Engineering and Department of Civil & Environmental
Wave Driven Free Surface Motion in the Gap between a Tanker and an FLNG Barge L. Sun a, R. Eatock Taylor a,b and P. H. Taylor b a Centre for Offshore Research & Engineering and Department of Civil & Environmental