Simple Chaotic Oscillator: From Mathematical Model to Practical Experiment
|
|
|
- Helen Stephens
- 6 years ago
- Views:
Transcription
1 6 J. PERŽELA, Z. KOLKA, S. HANUS, SIMPLE CHAOIC OSCILLAOR: FROM MAHEMAICAL MODEL Simple Chaotic Oscillator: From Mathematical Model to Practical Experiment Jiří PERŽELA, Zdeněk KOLKA, Stanislav HANUS Dept. of Radio Electronics, Brno University of echnology, Purkyňova 8, 6 00 Brno, Czech Republic xpetrz07@stud.feec.vutbr.cz Abstract. his paper shows the circuitry implementation and practical verification of the autonomous nonlinear oscillator. Since it is described by a single third-order differential equation, its state variables can be considered as the position, velocity and acceleration and thus have direct connection to a real physical system. Moreover, for some specific configurations of internal system parameters, it can exhibit a period doubling bifurcation leading to chaos. wo different structures of the nonlinear element were verified by a comparison of numerically integrated trajectory with the oscilloscope screenshots. Keywords Nonlinear oscillator, chaos, Lyapunov exponents, circuit realization, measurement.. Introduction It is well known that many physical systems with some time evolution can be described by a set of generally nonlinear differential equations. It seems that an electronic circuit is an easy way how to construct a dynamical system which represents a given mathematical model. hat is why we often use this approach for the purpose of studying dynamical motion, which can be simple (fixed points, limit cycles) as well as very complicated (chaos). We can also see some universality behind the construction of chaotic oscillators, because we are not interested in the concrete physical interpretation of the individual state variables. For example, chaos was recently reported in the scientific fields such as chemistry, mechanics, economy, biology, etc. For lumped electronic circuit, the necessary condition is a finite number of the state variables and, of course, a complexity of the synthesized network grows in accordance with growing dimension of the dynamical system. he very first discovered chaotic oscillator was deeply described in [], and is so far the only dynamical system where the presence of chaos was confirmed numerically, experimentally as well as mathematically. hese equations, taking name after its discoverer as the Chua s equations, belong to extensive group of dynamical systems covered by a following state space representation in compact matrix form x& = A x + b h ( w x) (a) where x R is a vector of the state variables, A is a square matrix and b, w are column vectors. he saturation-type nonlinearity of the form h ( w x) = 0.5( w x + w x ), (b) separates the state space by two parallel boundary planes U ± into the three affine regions making a brief analysis possible and quite simple. Due to the symmetrical vector field with respect to the origin, the dynamical behavior in both outer regions D ± of the state space is the same and determined by the roots of the characteristic polynomial det ( s E A) = ( s υ )( s υ )( s υ ) = and similarly for single inner region D 0 = s q s + q s q = 0, (a) [ s E ( A + b w ) ] = ( s µ )( s µ )( s ) = det µ = s p s + p s p = 0, (b) where E is the unity matrix. In the parameter space of some interest we can assume one fixed point per state space region, namely and ( A + b w ) x = 0 x = ( 0 0 ) x = ± A inner inner 0 b outer, det ( ) 0, (a) A. (b) he main property of the chaotic solution is in extreme sensitivity to the changes of the initial conditions. It implies that we can not obtain closed-form analytic solution, so our analysis is restricted to the numerical integration. here is always some uncertainty in the initial state so that any predictions about future behavior are no longer available. Moreover, the chaotic attractor is dense having a fractional topological dimension. No-intersection theorem means that for chaos there must be at least three state variables.
2 RADIOENGINEERING, VOL. 5, NO., APRIL Mathematical Model Note that the dynamical system expressed as () is linear in each region of the state space, with the behavior given uniquely by eigenvalues, roots of the characteristic polynomial. o model any type of motion of such a class of dynamical systems, the parameter space must be at least six-dimensional. Now, we try to reduce this amount as much as possible, preserving a global qualitative behavior. o specify the parameter window where the chaos becomes possible, we should first recall the relations between eigenvalues and their equivalent numbers p i s and q i s. Substituting s= /+Λ into () leads to a reduced cubic polynomial of the form where Λ + Λ + η = 0 9 η = 6 7. (5) Let denote and (4) = + +. (6a) ψ pos, neg = η + ± η. (6b) For >0 we have one real λ = ψ pos + /, (7) and a pair of complex conjugated numbers σ±ωi with the following real and imaginary part σ = ψ pos + /, ω = ψ /. (8) / neg In these terms i =p i or i =q i depending on the region of the state space. he relations between eigenvalues and their equivalent numbers are given by the formulas σ λ = +, λ ( σ ω ) = σ ω + σ λ = +, +. (9) In the case of double-scroll attractor, state space geometry is D ± : R u R s and D 0 : R u R s while for producing the so-called double-hook attractor it should be D ± : R u R s together with D 0 : R u R s R s. In spite of the obvious restrictions of the eigenvalues resulting from the terms (9), the inner region can behave like an overdamped circuit. o date, no double-hook attractor produced by a nonlinear oscillator was reported. Searching for such a configuration of system parameters leading to some structure of chaotic attractor [6] is the topic of our future study. he process of reduction of internal system parameters is based on the equivalence of some pair q i and p i with the same order. Since the parameter directly corresponds to λ we have immedietely outer inner λ < q 0, λ > p 0, (0) 0 < 0 > leading to the condition q p. If this is satisfied, there is just one equilibrium point per region as necessary for generation of chaotic attractors. Starting with the reference dynamical system of class C presented in [] and taking into account q =p and q =p we can write the differential equations describing the new dynamical system as d x / dt = y, d y / dt = z, ( x) d z / dt q z q y + g, () = where the piecewise-linear (PWL) function x = q x + p q h x. () ( ) ( ) ( ) g he fixed points located inside regions D ± migrate along the x axis with the ratio outer ( ± p q 0 0) x =. () / m Note that these fixed points can eventually enter D 0 region. It is evident that q 0. Similarly, p 0 otherwise there is an equilibrium line in the inner state space segment. Due to the dissipativity of the system, one must have q <0. Next, let write a basic conditions using a signum function, i.e. sign(σ inner ) sign(σ outer ) and σ inner <0. hen, terms (9) lead to q, < σ + ω outer q λ >. (4) Note that all conditions above are in accordance with a formation of hyperbolic equilibria, where σ 0. o preserve σ outer >0, i.e. the saddle-focus of index equilibria in D ± we have ψ pos <min(-q /, q /). he process of doublescroll attractor evolution is briefly discussed by means of Fig. 4. It is evident that both boundary planes U ± can not be coplanar with any eigenplane denoted as ep or eigenvector marked as ev. Nevertheless, to acquire a better overview on the global dynamics, one can make a linear transformation of coordinates. For example, if the state matrix is in a real Jordan form, ev is orthogonal to ep. In spite of this, making a rigorous mathematical proof of chaos is a nontrivial task. Here, we simply suppose that the so-called Shilnikov s theorems [7] are fulfilled, its detailed form will be given elsewhere. In further text, we adopt the following constant set of the parameters q =-0.6, q = (5) he same numbers also appear in []. Now, let see what eigenvalues hold for the partial cases of the Fig. 4. For the first picture it is σ outer =-0.05, λ outer =-0.50, σ inner =-0.57, λ inner =0.545 and for the last picture the corresponding eigenvalues are σ outer =0.7, λ outer =-0.94, σ inner =-0.57, λ inner =0.545.
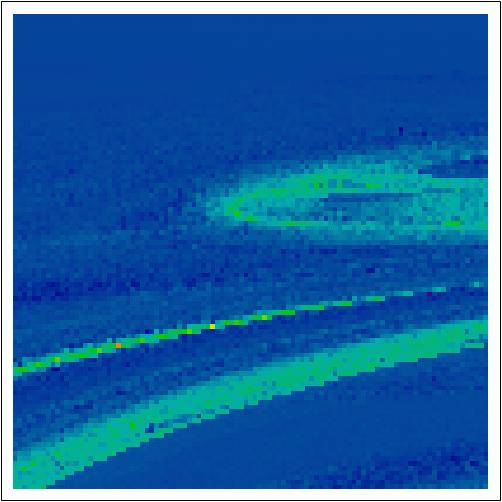
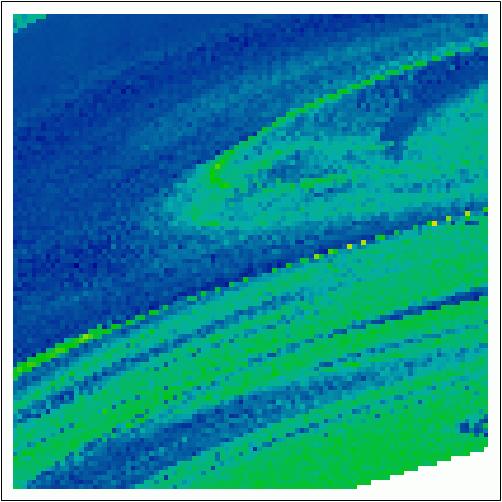
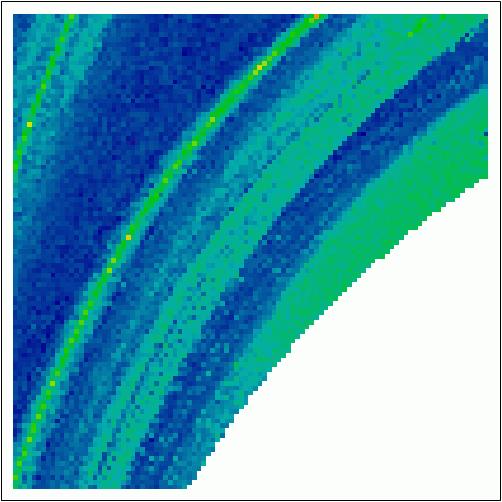
3 8 J. PERŽELA, Z. KOLKA, S. HANUS, SIMPLE CHAOIC OSCILLAOR: FROM MAHEMAICAL MODEL Let define the volume element in the tangent space of the vector field. We can classify the type of the attractor by using the concept of one-dimensional Lyapunov exponent (LE), which measures the average rate of the convergence or divergence of two neighborhood trajectories. here are just three LE and, in accordance with the natural definition of chaos, one LE must be positive and one equals to zero. Because of the dissipation, the last one must be negative with the largest absolute value, as the element is shrinking with the time progression. Fig. and Fig. illustrate how the largest one-dimensional LE varies with the two natural bifurcation parameters p and q (with respect to circuit). Each of these graphs consist of 00 point, computed for final time t max =400. A standard Gram-Smith orthogonalization were performed during the estimation after each t= step. he significance of colors is shown in Fig.. From this point of view, light blue marks a trivial fixed point and inside the white areas entire solution suddenly becomes unbounded. Selected state trajectories of some interest were also numerically simulated by using Math- CAD and build-in 4 th order Runge-Kutta iteration method with time interval t (0, 600), iteration step =0.06 and initial conditions x o =( ). he results are shown in Fig., with color scale growing along the vertical axis.. Circuitry Implementation he algebraical simplicity of the differential equations does not guarantee also its easy physical implementation. In spite of this, the new dynamical system () has one big advantage if compared to a classical first ODE equivalent of Chua s equation [4]. It is much more easy to practically realize () with four independent parameters than a system with six parameters. he straightforward circuit synthesis is usually based on basic building blocks such as inverting integrator, differential amplifiers and PWL transfer function. Such realization leads to a large number of circuit elements. Here, we are going to use a completely different approach. It is evident that we can recast () into the single differential equation of the third-order. hus, we can realize this dynamical system by parallel connection of the third-order admittance function together with a nonlinear resistor having PWL or polynomial AV curve. For admittance function shown in Fig. 5 we can derive the expression () s C C C R R s + C C ( R + R ) s + ( C C )s Y + =. o obtain a common-valued circuit elements, a current and time rescaling have been performed leading to following listing of linear capacitors and resistors C =C =5 nf, C =6 nf, R =0 kω, R =0 kω, (7) and operational amplifier AD7. For experimental verification, we suppose that (7) does not change. wo different configurations of the active nonlinear resistor have been used, i.e. PWL resistor shown in Fig. 6 and polynomial resistor with the structure given by Fig. 7. In the first case, N4007 diodes and current-feedback amplifier AD844 has been used to form a basic negative slope of the final AV curve. he voltages of two independent external dc sources should be chosen carefully low to preserve CFOA working in the linear regime. Let consider some level of idealization resulting into the equations U + = U, C I = I +, I = 0, C O U = U. (8) he input admittance of the PWL resistor in the region D 0 then becomes Y = /, (9a) input R neg while in both outer segments of the vector field it is input ( Rslope + Rd ) Rneg Y = / /, (9b) where R d is a differential resistance of a diode in the forward direction. We can derive the fundamental condition for the existence of three fixed points in the form R slope +R d <R neg which is equivalent to the intersection of the PWL AV characteristics of the resistor with the load line identical with horizontal axis i 0. For the same impedance norm used above, we can observe a double-scroll attractor if R neg =0 kω, R slope = kω. (0) Note that the voltage output of CFOA is buffered and directly represents the state variable x(t). We can approximate the PWL curve by a third-order polynomial function. For this purpose, two four-quadrant analog multipliers AD6 can be used, both with transfer function W=K(X-X)(Y-Y)+Z, where K=0.. It is not hard to derive the analytic expression i = f K R Ra c ( u) = u + u a R Rd R b which generates a double-scroll attractor when, () R a =R b =. kω, R c = kω, R d =0 kω. () Nonlinear oscillator works in hybrid voltage/current mode. Fig. 8 is an example of the time dependence of the chaotic waveform, namely b(t) and d(t). In the end, some oscilloscope HP5460B screenshots of selected chaotic attractors are presented in Fig. 9, making use of the XY view mode. Similarly, Fig. 0 shows a qualitatively equivalent chaotic structure for a polynomial nonlinearity. It is worth nothing that also Pspice circuit simulator gives us the same results for our oscillator with both types of the nonlinearity. Moreover, several other types of PWL AV characteristics can produce a chaotic waveform such as signum, sigmoid, goniometrical or exponential functions. For the first case, one can make use of a single comparator. he remaining functions are much more difficult to implement.
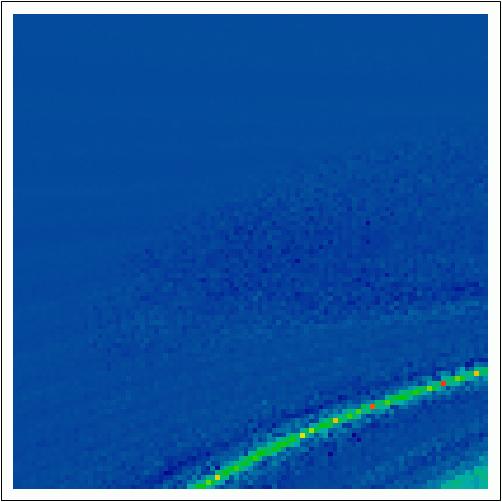
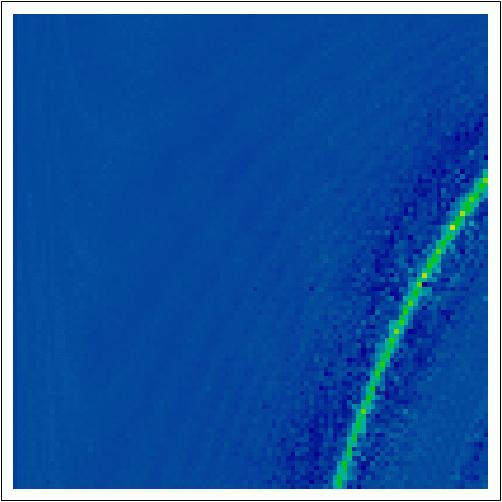
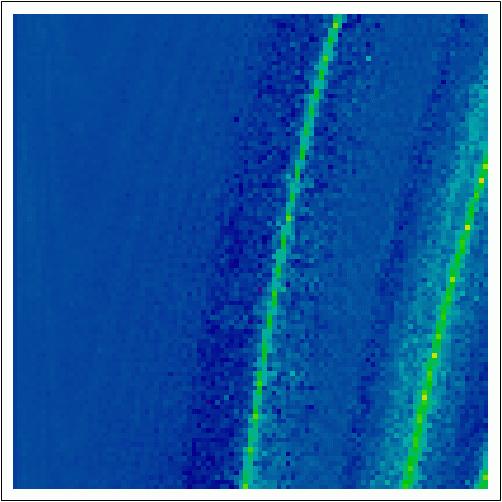
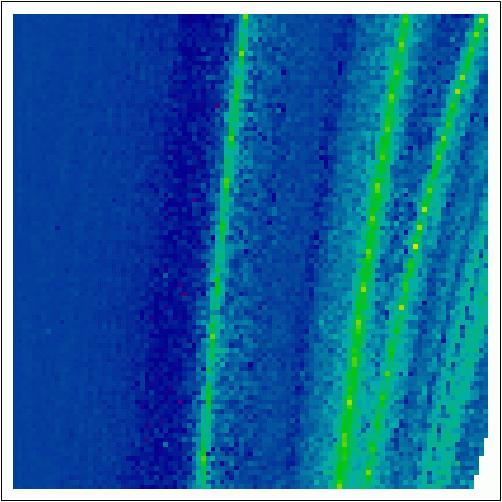
4 RADIOENGINEERING, VOL. 5, NO., APRIL Fig.. Largest LE as a function of two internal system parameters: horizontal axis p (0, ) and vertical axis q (-, -5).



")
. Fig.")

5 0 J. PERŽELA, Z. KOLKA, S. HANUS, SIMPLE CHAOIC OSCILLAOR: FROM MAHEMAICAL MODEL Fig.. Largest LE as a function of two internal system parameter: horizontal axis p (, 6) and vertical axis q (-, -). Fig.. Perspective views on different state space attractors: a) double-scroll b) funnel c) single-scroll.
 q =-0.4 b) q =-0.")
. Fig. 9.")





6 RADIOENGINEERING, VOL. 5, NO., APRIL 006 Fig. 4. Evolution of the double-scroll attractor with p =0.8 and: a) q =-0.4 b) q =-0.6 c) q =-0.8 d) q =-.. Fig. 8. Chaotic waveform in time domain, on-diode voltage. Fig. 5. hird-order admittance function Y(s). Fig. 9. Plane projections of selected chaotic steady states. Fig. 6. hree-segment PWL resistor. Fig. 7. Nonlinear resistor with polynomial AV characteristics. 4. Conclusion Although the nonlinear oscillator belongs to the dynamical systems of class C, it can not be realized by using a classical circuit synthesis, since it leads to the unrealistic values of circuit components [5]. he physical realization is very simple, removing the necessity of using cumbersome inductors with weakly defined inductance. Precise tuning of the circuit parameters allows us to observe different structures of chaotic attractors, corresponding transient events, periodical signals having a fundamental frequency as well as multiple-periodic harmonic waveforms. Practical measurements can prove a very good final agreement with theoretical expectations. hus, this circuit is well suited for

![References [] CHUA, L. O., KOMURO, M., MASUMOO,. he double scroll family. IEEE rans. on CAS I, 986, vol., no., p. 07 7. [] POSPÍŠIL, J., KOLKA, Z., HORSKÁ, J., BRZOBOHAÝ, J.](/docs-images/78/77455572/images/7-1.jpg "New reference state model of the third-order piecewise-linear dynamical system. Radioengineering, 000, vol. 9, no., p. 4. [] SPRO, J. C., LINZ, S. J. Algebraically simple chaotic flows.")
![International Journal of Chaos heory and Applications, 000, vol. 5, no., p. 0. [4] POSPÍŠIL, J., KOLKA, Z., HORSKÁ, J., BRZOBOHAÝ, J. Simplest ODE equivalents of Chua s equations.](/docs-images/78/77455572/images/7-2.jpg "International Journal of Bifurcation and Chaos, 000, vol. 0, no., p.. [5] CHUA, L. O., LIN, G. N. Canonical realization of Chua s circuit family. IEEE rans. on CAS I, 990, vol.")
![7, no. 7, p. 885 90. [6] SILVA, CH. P., CHUA, L. O. he overdamped double-scroll family. International Journal of Circuit heory and Applications, 988, vol. 6, p. 0.](/docs-images/78/77455572/images/7-3.jpg "Fig. 0. Plane projections of selected chaotic steady states. [7] SILVA, CH. P. Shilnikov s theorem A tutorial. IEEE rans. on CAS I, 99, vol. 40, no. 0, p. 675 68.")


7 J. PERŽELA, Z. KOLKA, S. HANUS, SIMPLE CHAOIC OSCILLAOR: FROM MAHEMAICAL MODEL laboratory experiments and educational purposed. During these measurements, we also verify that the chaotic signal has a continuous and broad-band frequency spectrum. his property can be used in many applications. References [] CHUA, L. O., KOMURO, M., MASUMOO,. he double scroll family. IEEE rans. on CAS I, 986, vol., no., p [] POSPÍŠIL, J., KOLKA, Z., HORSKÁ, J., BRZOBOHAÝ, J. New reference state model of the third-order piecewise-linear dynamical system. Radioengineering, 000, vol. 9, no., p. 4. [] SPRO, J. C., LINZ, S. J. Algebraically simple chaotic flows. International Journal of Chaos heory and Applications, 000, vol. 5, no., p. 0. [4] POSPÍŠIL, J., KOLKA, Z., HORSKÁ, J., BRZOBOHAÝ, J. Simplest ODE equivalents of Chua s equations. International Journal of Bifurcation and Chaos, 000, vol. 0, no., p.. [5] CHUA, L. O., LIN, G. N. Canonical realization of Chua s circuit family. IEEE rans. on CAS I, 990, vol. 7, no. 7, p [6] SILVA, CH. P., CHUA, L. O. he overdamped double-scroll family. International Journal of Circuit heory and Applications, 988, vol. 6, p. 0. Fig. 0. Plane projections of selected chaotic steady states. [7] SILVA, CH. P. Shilnikov s theorem A tutorial. IEEE rans. on CAS I, 99, vol. 40, no. 0, p About Authors Jiří PERŽELA was born in Brno, Czech Republic, in 978. Currently, he is a PhD. student at the Dept. of Radio Electronics with research interest focused on chaos and related topics. Fig.. Voltages at the output of both multipliers. Acknowledgements he research described in this paper was financially supported by the projects GAČR no. 0/0/H05, GAČR no. 0/04/0469 and MSM Zdeněk KOLKA was born in Brno, Czech Republic, in 969. At present, he is an Associate Professor at the Dept. of Radio Electronics. He is interested in PWL modeling, circuit simulation and nonlinear dynamical systems. Stanislav HANUS was born in Brno, Czech Republic, in 950. He is an Associate Professor at the Dept. of Radio Electronics with research interest concentrated on wireless and mobile communications.
On the Possibility of Chaos Destruction via Parasitic Properties of the Used Active Devices
 On the Possibility of Chaos Destruction via Parasitic Properties of the Used Active Devices ZDENEK HRUBOS Brno University of Technology Department of Radio Electronics Purkynova 8, 62 00 Brno CZECH REPUBLIC
On the Possibility of Chaos Destruction via Parasitic Properties of the Used Active Devices ZDENEK HRUBOS Brno University of Technology Department of Radio Electronics Purkynova 8, 62 00 Brno CZECH REPUBLIC
A SYSTEMATIC APPROACH TO GENERATING n-scroll ATTRACTORS
 International Journal of Bifurcation and Chaos, Vol. 12, No. 12 (22) 297 2915 c World Scientific Publishing Company A SYSTEMATIC APPROACH TO ENERATIN n-scroll ATTRACTORS UO-QUN ZHON, KIM-FUN MAN and UANRON
International Journal of Bifurcation and Chaos, Vol. 12, No. 12 (22) 297 2915 c World Scientific Publishing Company A SYSTEMATIC APPROACH TO ENERATIN n-scroll ATTRACTORS UO-QUN ZHON, KIM-FUN MAN and UANRON
Implementing Memristor Based Chaotic Circuits
 Implementing Memristor Based Chaotic Circuits Bharathwaj Muthuswamy Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2009-156 http://www.eecs.berkeley.edu/pubs/techrpts/2009/eecs-2009-156.html
Implementing Memristor Based Chaotic Circuits Bharathwaj Muthuswamy Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2009-156 http://www.eecs.berkeley.edu/pubs/techrpts/2009/eecs-2009-156.html
A simple electronic circuit to demonstrate bifurcation and chaos
 A simple electronic circuit to demonstrate bifurcation and chaos P R Hobson and A N Lansbury Brunel University, Middlesex Chaos has generated much interest recently, and many of the important features
A simple electronic circuit to demonstrate bifurcation and chaos P R Hobson and A N Lansbury Brunel University, Middlesex Chaos has generated much interest recently, and many of the important features
Optimal Piecewise-Linear Approximation of the Quadratic Chaotic Dynamics
 0 J. PETRŽELA, OPTIMAL PIECEWISE-LINEAR APPROXIMATION OF THE QUADRATIC CHAOTIC DYNAMICS Optimal Piecewise-Linear Approximation of the Quadratic Chaotic Dynamics Jiří PETRŽELA Dept. of Radio Electronics,
0 J. PETRŽELA, OPTIMAL PIECEWISE-LINEAR APPROXIMATION OF THE QUADRATIC CHAOTIC DYNAMICS Optimal Piecewise-Linear Approximation of the Quadratic Chaotic Dynamics Jiří PETRŽELA Dept. of Radio Electronics,
Experimental Characterization of Nonlinear Dynamics from Chua s Circuit
 Experimental Characterization of Nonlinear Dynamics from Chua s Circuit Patrick Chang, Edward Coyle, John Parker, Majid Sodagar NLD class final presentation 12/04/2012 Outline Introduction Experiment setup
Experimental Characterization of Nonlinear Dynamics from Chua s Circuit Patrick Chang, Edward Coyle, John Parker, Majid Sodagar NLD class final presentation 12/04/2012 Outline Introduction Experiment setup
Construction of Classes of Circuit-Independent Chaotic Oscillators Using Passive-Only Nonlinear Devices
 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 48, NO. 3, MARCH 2001 289 Construction of Classes of Circuit-Independent Chaotic Oscillators Using Passive-Only Nonlinear
IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS I: FUNDAMENTAL THEORY AND APPLICATIONS, VOL. 48, NO. 3, MARCH 2001 289 Construction of Classes of Circuit-Independent Chaotic Oscillators Using Passive-Only Nonlinear
Experimental Characterization of Nonlinear Dynamics from Chua s Circuit
 Experimental Characterization of Nonlinear Dynamics from Chua s Circuit John Parker*, 1 Majid Sodagar, 1 Patrick Chang, 1 and Edward Coyle 1 School of Physics, Georgia Institute of Technology, Atlanta,
Experimental Characterization of Nonlinear Dynamics from Chua s Circuit John Parker*, 1 Majid Sodagar, 1 Patrick Chang, 1 and Edward Coyle 1 School of Physics, Georgia Institute of Technology, Atlanta,
Chua s Oscillator Using CCTA
 Chua s Oscillator Using CCTA Chandan Kumar Choubey 1, Arun Pandey 2, Akanksha Sahani 3, Pooja Kadam 4, Nishikant Surwade 5 1,2,3,4,5 Department of Electronics and Telecommunication, Dr. D. Y. Patil School
Chua s Oscillator Using CCTA Chandan Kumar Choubey 1, Arun Pandey 2, Akanksha Sahani 3, Pooja Kadam 4, Nishikant Surwade 5 1,2,3,4,5 Department of Electronics and Telecommunication, Dr. D. Y. Patil School
Majid Sodagar, 1 Patrick Chang, 1 Edward Coyler, 1 and John Parke 1 School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA
 Experimental Characterization of Chua s Circuit Majid Sodagar, 1 Patrick Chang, 1 Edward Coyler, 1 and John Parke 1 School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA (Dated:
Experimental Characterization of Chua s Circuit Majid Sodagar, 1 Patrick Chang, 1 Edward Coyler, 1 and John Parke 1 School of Physics, Georgia Institute of Technology, Atlanta, Georgia 30332, USA (Dated:
Chaos in Modified CFOA-Based Inductorless Sinusoidal Oscillators Using a Diode
 Chaotic Modeling and Simulation CMSIM) 1: 179-185, 2013 Chaos in Modified CFOA-Based Inductorless Sinusoidal Oscillators Using a iode Buncha Munmuangsaen and Banlue Srisuchinwong Sirindhorn International
Chaotic Modeling and Simulation CMSIM) 1: 179-185, 2013 Chaos in Modified CFOA-Based Inductorless Sinusoidal Oscillators Using a iode Buncha Munmuangsaen and Banlue Srisuchinwong Sirindhorn International
Experimental verification of the Chua s circuit designed with UGCs
 Experimental verification of the Chua s circuit designed with UGCs C. Sánchez-López a), A. Castro-Hernández, and A. Pérez-Trejo Autonomous University of Tlaxcala Calzada Apizaquito S/N, Apizaco, Tlaxcala,
Experimental verification of the Chua s circuit designed with UGCs C. Sánchez-López a), A. Castro-Hernández, and A. Pérez-Trejo Autonomous University of Tlaxcala Calzada Apizaquito S/N, Apizaco, Tlaxcala,
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
APPPHYS217 Tuesday 25 May 2010
 APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
A FEASIBLE MEMRISTIVE CHUA S CIRCUIT VIA BRIDGING A GENERALIZED MEMRISTOR
 Journal of Applied Analysis and Computation Volume 6, Number 4, November 2016, 1152 1163 Website:http://jaac-online.com/ DOI:10.11948/2016076 A FEASIBLE MEMRISTIVE CHUA S CIRCUIT VIA BRIDGING A GENERALIZED
Journal of Applied Analysis and Computation Volume 6, Number 4, November 2016, 1152 1163 Website:http://jaac-online.com/ DOI:10.11948/2016076 A FEASIBLE MEMRISTIVE CHUA S CIRCUIT VIA BRIDGING A GENERALIZED
A New Dynamic Phenomenon in Nonlinear Circuits: State-Space Analysis of Chaotic Beats
 A New Dynamic Phenomenon in Nonlinear Circuits: State-Space Analysis of Chaotic Beats DONATO CAFAGNA, GIUSEPPE GRASSI Diparnto Ingegneria Innovazione Università di Lecce via Monteroni, 73 Lecce ITALY giuseppe.grassi}@unile.it
A New Dynamic Phenomenon in Nonlinear Circuits: State-Space Analysis of Chaotic Beats DONATO CAFAGNA, GIUSEPPE GRASSI Diparnto Ingegneria Innovazione Università di Lecce via Monteroni, 73 Lecce ITALY giuseppe.grassi}@unile.it
Experimental and numerical realization of higher order autonomous Van der Pol-Duffing oscillator
 Indian Journal of Pure & Applied Physics Vol. 47, November 2009, pp. 823-827 Experimental and numerical realization of higher order autonomous Van der Pol-Duffing oscillator V Balachandran, * & G Kandiban
Indian Journal of Pure & Applied Physics Vol. 47, November 2009, pp. 823-827 Experimental and numerical realization of higher order autonomous Van der Pol-Duffing oscillator V Balachandran, * & G Kandiban
First-order transient
 EIE209 Basic Electronics First-order transient Contents Inductor and capacitor Simple RC and RL circuits Transient solutions Constitutive relation An electrical element is defined by its relationship between
EIE209 Basic Electronics First-order transient Contents Inductor and capacitor Simple RC and RL circuits Transient solutions Constitutive relation An electrical element is defined by its relationship between
7 Planar systems of linear ODE
 7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
7 Planar systems of linear ODE Here I restrict my attention to a very special class of autonomous ODE: linear ODE with constant coefficients This is arguably the only class of ODE for which explicit solution
Introducing chaotic circuits in an undergraduate electronic course. Abstract. Introduction
 Introducing chaotic circuits in an undergraduate electronic course Cherif Aissi 1 University of ouisiana at afayette, College of Engineering afayette, A 70504, USA Session II.A3 Abstract For decades, the
Introducing chaotic circuits in an undergraduate electronic course Cherif Aissi 1 University of ouisiana at afayette, College of Engineering afayette, A 70504, USA Session II.A3 Abstract For decades, the
Parameter Matching Using Adaptive Synchronization of Two Chua s Oscillators: MATLAB and SPICE Simulations
 Parameter Matching Using Adaptive Synchronization of Two Chua s Oscillators: MATLAB and SPICE Simulations Valentin Siderskiy and Vikram Kapila NYU Polytechnic School of Engineering, 6 MetroTech Center,
Parameter Matching Using Adaptive Synchronization of Two Chua s Oscillators: MATLAB and SPICE Simulations Valentin Siderskiy and Vikram Kapila NYU Polytechnic School of Engineering, 6 MetroTech Center,
Controlling Chaos in a State-Dependent Nonlinear System
 Electronic version of an article published as International Journal of Bifurcation and Chaos Vol. 12, No. 5, 2002, 1111-1119, DOI: 10.1142/S0218127402004942 World Scientific Publishing Company, https://www.worldscientific.com/worldscinet/ijbc
Electronic version of an article published as International Journal of Bifurcation and Chaos Vol. 12, No. 5, 2002, 1111-1119, DOI: 10.1142/S0218127402004942 World Scientific Publishing Company, https://www.worldscientific.com/worldscinet/ijbc
Research Article Amplitude and Frequency Control: Stability of Limit Cycles in Phase-Shift and Twin-T Oscillators
 Hindawi Publishing Corporation Active and Passive Electronic Components Volume 008, Article ID 53968, 6 pages doi:0.55/008/53968 Research Article Amplitude and Frequency Control: Stability of Limit Cycles
Hindawi Publishing Corporation Active and Passive Electronic Components Volume 008, Article ID 53968, 6 pages doi:0.55/008/53968 Research Article Amplitude and Frequency Control: Stability of Limit Cycles
A Novel Three Dimension Autonomous Chaotic System with a Quadratic Exponential Nonlinear Term
 ETASR - Engineering, Technology & Applied Science Research Vol., o.,, 9-5 9 A Novel Three Dimension Autonomous Chaotic System with a Quadratic Exponential Nonlinear Term Fei Yu College of Information Science
ETASR - Engineering, Technology & Applied Science Research Vol., o.,, 9-5 9 A Novel Three Dimension Autonomous Chaotic System with a Quadratic Exponential Nonlinear Term Fei Yu College of Information Science
A New Circuit for Generating Chaos and Complexity: Analysis of the Beats Phenomenon
 A New Circuit for Generating Chaos and Complexity: Analysis of the Beats Phenomenon DONATO CAFAGNA, GIUSEPPE GRASSI Diparnto Ingegneria Innovazione Università di Lecce via Monteroni, 73 Lecce ITALY Abstract:
A New Circuit for Generating Chaos and Complexity: Analysis of the Beats Phenomenon DONATO CAFAGNA, GIUSEPPE GRASSI Diparnto Ingegneria Innovazione Università di Lecce via Monteroni, 73 Lecce ITALY Abstract:
Constructing Chaotic Systems with Total Amplitude Control
 International Journal of Bifurcation and Chaos, Vol. 25, No. 10 (2015) 1530025 (14 pages) c World Scientific Publishing Company DOI: 10.1142/S0218127415300256 Constructing Chaotic Systems with Total Amplitude
International Journal of Bifurcation and Chaos, Vol. 25, No. 10 (2015) 1530025 (14 pages) c World Scientific Publishing Company DOI: 10.1142/S0218127415300256 Constructing Chaotic Systems with Total Amplitude
Synchronization and control in small networks of chaotic electronic circuits
 Synchronization and control in small networks of chaotic electronic circuits A. Iglesias Dept. of Applied Mathematics and Computational Sciences, Universi~ of Cantabria, Spain Abstract In this paper, a
Synchronization and control in small networks of chaotic electronic circuits A. Iglesias Dept. of Applied Mathematics and Computational Sciences, Universi~ of Cantabria, Spain Abstract In this paper, a
Experimental observation of direct current voltage-induced phase synchronization
 PRAMANA c Indian Academy of Sciences Vol. 67, No. 3 journal of September 2006 physics pp. 441 447 Experimental observation of direct current voltage-induced phase synchronization HAIHONG LI 1, WEIQING
PRAMANA c Indian Academy of Sciences Vol. 67, No. 3 journal of September 2006 physics pp. 441 447 Experimental observation of direct current voltage-induced phase synchronization HAIHONG LI 1, WEIQING
A New Chaotic Behavior from Lorenz and Rossler Systems and Its Electronic Circuit Implementation
 Circuits and Systems,,, -5 doi:.46/cs..5 Published Online April (http://www.scirp.org/journal/cs) A New Chaotic Behavior from Lorenz and Rossler Systems and Its Electronic Circuit Implementation Abstract
Circuits and Systems,,, -5 doi:.46/cs..5 Published Online April (http://www.scirp.org/journal/cs) A New Chaotic Behavior from Lorenz and Rossler Systems and Its Electronic Circuit Implementation Abstract
Laboratory I: Impedance
 Physics 331, Fall 2008 Lab I - Handout 1 Laboratory I: Impedance Reading: Simpson Chapter 1 (if necessary) & Chapter 2 (particularly 2.9-2.13) 1 Introduction In this first lab we review the properties
Physics 331, Fall 2008 Lab I - Handout 1 Laboratory I: Impedance Reading: Simpson Chapter 1 (if necessary) & Chapter 2 (particularly 2.9-2.13) 1 Introduction In this first lab we review the properties
AN ELECTRIC circuit containing a switch controlled by
 878 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS II: ANALOG AND DIGITAL SIGNAL PROCESSING, VOL. 46, NO. 7, JULY 1999 Bifurcation of Switched Nonlinear Dynamical Systems Takuji Kousaka, Member, IEEE, Tetsushi
878 IEEE TRANSACTIONS ON CIRCUITS AND SYSTEMS II: ANALOG AND DIGITAL SIGNAL PROCESSING, VOL. 46, NO. 7, JULY 1999 Bifurcation of Switched Nonlinear Dynamical Systems Takuji Kousaka, Member, IEEE, Tetsushi
MULTISTABILITY IN A BUTTERFLY FLOW
 International Journal of Bifurcation and Chaos, Vol. 23, No. 12 (2013) 1350199 (10 pages) c World Scientific Publishing Company DOI: 10.1142/S021812741350199X MULTISTABILITY IN A BUTTERFLY FLOW CHUNBIAO
International Journal of Bifurcation and Chaos, Vol. 23, No. 12 (2013) 1350199 (10 pages) c World Scientific Publishing Company DOI: 10.1142/S021812741350199X MULTISTABILITY IN A BUTTERFLY FLOW CHUNBIAO
Mathematical analysis of a third-order memristor-based Chua oscillators
 Mathematical analysis of a third-order memristor-based Chua oscillators Vanessa Botta, Cristiane Néspoli, Marcelo Messias Depto de Matemática, Estatística e Computação, Faculdade de Ciências e Tecnologia,
Mathematical analysis of a third-order memristor-based Chua oscillators Vanessa Botta, Cristiane Néspoli, Marcelo Messias Depto de Matemática, Estatística e Computação, Faculdade de Ciências e Tecnologia,
Dynamical Systems and Chaos Part I: Theoretical Techniques. Lecture 4: Discrete systems + Chaos. Ilya Potapov Mathematics Department, TUT Room TD325
 Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
Dynamical Systems and Chaos Part I: Theoretical Techniques Lecture 4: Discrete systems + Chaos Ilya Potapov Mathematics Department, TUT Room TD325 Discrete maps x n+1 = f(x n ) Discrete time steps. x 0
Deterministic Chaos Lab
 Deterministic Chaos Lab John Widloski, Robert Hovden, Philip Mathew School of Physics, Georgia Institute of Technology, Atlanta, GA 30332 I. DETERMINISTIC CHAOS LAB This laboratory consists of three major
Deterministic Chaos Lab John Widloski, Robert Hovden, Philip Mathew School of Physics, Georgia Institute of Technology, Atlanta, GA 30332 I. DETERMINISTIC CHAOS LAB This laboratory consists of three major
Some of the different forms of a signal, obtained by transformations, are shown in the figure. jwt e z. jwt z e
 Transform methods Some of the different forms of a signal, obtained by transformations, are shown in the figure. X(s) X(t) L - L F - F jw s s jw X(jw) X*(t) F - F X*(jw) jwt e z jwt z e X(nT) Z - Z X(z)
Transform methods Some of the different forms of a signal, obtained by transformations, are shown in the figure. X(s) X(t) L - L F - F jw s s jw X(jw) X*(t) F - F X*(jw) jwt e z jwt z e X(nT) Z - Z X(z)
RICH VARIETY OF BIFURCATIONS AND CHAOS IN A VARIANT OF MURALI LAKSHMANAN CHUA CIRCUIT
 International Journal of Bifurcation and Chaos, Vol. 1, No. 7 (2) 1781 1785 c World Scientific Publishing Company RICH VARIETY O BIURCATIONS AND CHAOS IN A VARIANT O MURALI LAKSHMANAN CHUA CIRCUIT K. THAMILMARAN
International Journal of Bifurcation and Chaos, Vol. 1, No. 7 (2) 1781 1785 c World Scientific Publishing Company RICH VARIETY O BIURCATIONS AND CHAOS IN A VARIANT O MURALI LAKSHMANAN CHUA CIRCUIT K. THAMILMARAN
CONTROLLING IN BETWEEN THE LORENZ AND THE CHEN SYSTEMS
 International Journal of Bifurcation and Chaos, Vol. 12, No. 6 (22) 1417 1422 c World Scientific Publishing Company CONTROLLING IN BETWEEN THE LORENZ AND THE CHEN SYSTEMS JINHU LÜ Institute of Systems
International Journal of Bifurcation and Chaos, Vol. 12, No. 6 (22) 1417 1422 c World Scientific Publishing Company CONTROLLING IN BETWEEN THE LORENZ AND THE CHEN SYSTEMS JINHU LÜ Institute of Systems
ADAPTIVE FEEDBACK LINEARIZING CONTROL OF CHUA S CIRCUIT
 International Journal of Bifurcation and Chaos, Vol. 12, No. 7 (2002) 1599 1604 c World Scientific Publishing Company ADAPTIVE FEEDBACK LINEARIZING CONTROL OF CHUA S CIRCUIT KEVIN BARONE and SAHJENDRA
International Journal of Bifurcation and Chaos, Vol. 12, No. 7 (2002) 1599 1604 c World Scientific Publishing Company ADAPTIVE FEEDBACK LINEARIZING CONTROL OF CHUA S CIRCUIT KEVIN BARONE and SAHJENDRA
Example of a Blue Sky Catastrophe
 PUB:[SXG.TEMP]TRANS2913EL.PS 16-OCT-2001 11:08:53.21 SXG Page: 99 (1) Amer. Math. Soc. Transl. (2) Vol. 200, 2000 Example of a Blue Sky Catastrophe Nikolaĭ Gavrilov and Andrey Shilnikov To the memory of
PUB:[SXG.TEMP]TRANS2913EL.PS 16-OCT-2001 11:08:53.21 SXG Page: 99 (1) Amer. Math. Soc. Transl. (2) Vol. 200, 2000 Example of a Blue Sky Catastrophe Nikolaĭ Gavrilov and Andrey Shilnikov To the memory of
SYNCHRONIZATION CRITERION OF CHAOTIC PERMANENT MAGNET SYNCHRONOUS MOTOR VIA OUTPUT FEEDBACK AND ITS SIMULATION
 SYNCHRONIZAION CRIERION OF CHAOIC PERMANEN MAGNE SYNCHRONOUS MOOR VIA OUPU FEEDBACK AND IS SIMULAION KALIN SU *, CHUNLAI LI College of Physics and Electronics, Hunan Institute of Science and echnology,
SYNCHRONIZAION CRIERION OF CHAOIC PERMANEN MAGNE SYNCHRONOUS MOOR VIA OUPU FEEDBACK AND IS SIMULAION KALIN SU *, CHUNLAI LI College of Physics and Electronics, Hunan Institute of Science and echnology,
The Wien Bridge Oscillator Family
 Downloaded from orbit.dtu.dk on: Dec 29, 207 The Wien Bridge Oscillator Family Lindberg, Erik Published in: Proceedings of the ICSES-06 Publication date: 2006 Link back to DTU Orbit Citation APA): Lindberg,
Downloaded from orbit.dtu.dk on: Dec 29, 207 The Wien Bridge Oscillator Family Lindberg, Erik Published in: Proceedings of the ICSES-06 Publication date: 2006 Link back to DTU Orbit Citation APA): Lindberg,
Lecture 7: Transistors and Amplifiers
 Lecture 7: Transistors and Amplifiers Hybrid Transistor Model for small AC : The previous model for a transistor used one parameter (β, the current gain) to describe the transistor. doesn't explain many
Lecture 7: Transistors and Amplifiers Hybrid Transistor Model for small AC : The previous model for a transistor used one parameter (β, the current gain) to describe the transistor. doesn't explain many
(Refer Slide Time: 00:32)
") Nonlinear Dynamical Systems Prof. Madhu. N. Belur and Prof. Harish. K. Pillai Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 12 Scilab simulation of Lotka Volterra
Nonlinear Dynamical Systems Prof. Madhu. N. Belur and Prof. Harish. K. Pillai Department of Electrical Engineering Indian Institute of Technology, Bombay Lecture - 12 Scilab simulation of Lotka Volterra
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
Research Article Adaptive Control of Chaos in Chua s Circuit
 Mathematical Problems in Engineering Volume 2011, Article ID 620946, 14 pages doi:10.1155/2011/620946 Research Article Adaptive Control of Chaos in Chua s Circuit Weiping Guo and Diantong Liu Institute
Mathematical Problems in Engineering Volume 2011, Article ID 620946, 14 pages doi:10.1155/2011/620946 Research Article Adaptive Control of Chaos in Chua s Circuit Weiping Guo and Diantong Liu Institute
Lecture 14 Date:
 Lecture 14 Date: 18.09.2014 L Type Matching Network Examples Nodal Quality Factor T- and Pi- Matching Networks Microstrip Matching Networks Series- and Shunt-stub Matching L Type Matching Network (contd.)
Lecture 14 Date: 18.09.2014 L Type Matching Network Examples Nodal Quality Factor T- and Pi- Matching Networks Microstrip Matching Networks Series- and Shunt-stub Matching L Type Matching Network (contd.)
Chapter 2 First-Order Time-Delayed Chaotic Systems: Design and Experiment
 Chapter 2 First-Order Time-Delayed Chaotic Systems: Design and Experiment In this chapter, we discuss the design principle of chaotic time-delayed systems with (i) a bimodal nonlinearity and (ii) an unimodal
Chapter 2 First-Order Time-Delayed Chaotic Systems: Design and Experiment In this chapter, we discuss the design principle of chaotic time-delayed systems with (i) a bimodal nonlinearity and (ii) an unimodal
CLASSIFICATION OF BIFURCATIONS AND ROUTES TO CHAOS IN A VARIANT OF MURALI LAKSHMANAN CHUA CIRCUIT
 International Journal of Bifurcation and Chaos, Vol. 12, No. 4 (2002) 783 813 c World Scientific Publishing Company CLASSIFICATION OF BIFURCATIONS AND ROUTES TO CHAOS IN A VARIANT OF MURALI LAKSHMANAN
International Journal of Bifurcation and Chaos, Vol. 12, No. 4 (2002) 783 813 c World Scientific Publishing Company CLASSIFICATION OF BIFURCATIONS AND ROUTES TO CHAOS IN A VARIANT OF MURALI LAKSHMANAN
Introducing Chaotic Circuits in Analog Systems Course
 Friday Afternoon Session - Faculty Introducing Chaotic Circuits in Analog Systems Course Cherif Aissi Department of Industrial Technology University of Louisiana at Lafayette Mohammed Zubair Department
Friday Afternoon Session - Faculty Introducing Chaotic Circuits in Analog Systems Course Cherif Aissi Department of Industrial Technology University of Louisiana at Lafayette Mohammed Zubair Department
Period-Doubling Analysis and Chaos Detection Using Commercial Harmonic Balance Simulators
 574 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 48, NO. 4, APRIL 2000 Period-Doubling Analysis and Chaos Detection Using Commercial Harmonic Balance Simulators Juan-Mari Collantes, Member,
574 IEEE TRANSACTIONS ON MICROWAVE THEORY AND TECHNIQUES, VOL. 48, NO. 4, APRIL 2000 Period-Doubling Analysis and Chaos Detection Using Commercial Harmonic Balance Simulators Juan-Mari Collantes, Member,
HIGHER-ORDER SPECTRA OF NONLINEAR POLYNOMIAL MODELS FOR CHUA S CIRCUIT
 Letters International Journal of Bifurcation and Chaos, Vol. 8, No. 12 (1998) 2425 2431 c World Scientific Publishing Company HIGHER-ORDER SPECTRA OF NONLINEAR POLYNOMIAL MODELS FOR CHUA S CIRCUIT STEVE
Letters International Journal of Bifurcation and Chaos, Vol. 8, No. 12 (1998) 2425 2431 c World Scientific Publishing Company HIGHER-ORDER SPECTRA OF NONLINEAR POLYNOMIAL MODELS FOR CHUA S CIRCUIT STEVE
A New Hyperchaotic Attractor with Complex Patterns
 A New Hyperchaotic Attractor with Complex Patterns Safieddine Bouali University of Tunis, Management Institute, Department of Quantitative Methods & Economics, 41, rue de la Liberté, 2000, Le Bardo, Tunisia
A New Hyperchaotic Attractor with Complex Patterns Safieddine Bouali University of Tunis, Management Institute, Department of Quantitative Methods & Economics, 41, rue de la Liberté, 2000, Le Bardo, Tunisia
CHUA S ATOM. Received March 16, 1999; Revised April 20, 1999
 Letters International Journal of Bifurcation and Chaos, Vol. 9, No. 6 (1999) 1153 1157 c World Scientific Publishing Company CHUA S ATOM DANIELA ROMANO,, MIRKO BOVATI and FRANCO MELONI INFM Dipartimento
Letters International Journal of Bifurcation and Chaos, Vol. 9, No. 6 (1999) 1153 1157 c World Scientific Publishing Company CHUA S ATOM DANIELA ROMANO,, MIRKO BOVATI and FRANCO MELONI INFM Dipartimento
Chua's circuit decomposition: a systematic design approach for chaotic oscillators
 Journal of the Franklin Institute 337 (2000) 251}265 Chua's circuit decomposition: a systematic design approach for chaotic oscillators A.S. Elwakil*, M.P. Kennedy Department of Electronic and Electrical
Journal of the Franklin Institute 337 (2000) 251}265 Chua's circuit decomposition: a systematic design approach for chaotic oscillators A.S. Elwakil*, M.P. Kennedy Department of Electronic and Electrical
Numerical Simulations in Jerk Circuit and It s Application in a Secure Communication System
 Numerical Simulations in Jerk Circuit and It s Application in a Secure Communication System A. SAMBAS, M. SANJAYA WS, M. MAMAT, N. V. KARADIMAS, O. TACHA Bolabot Techno Robotic School, Sanjaya Star Group
Numerical Simulations in Jerk Circuit and It s Application in a Secure Communication System A. SAMBAS, M. SANJAYA WS, M. MAMAT, N. V. KARADIMAS, O. TACHA Bolabot Techno Robotic School, Sanjaya Star Group
Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients. Takayuki Yamaguchi
 Hokkaido Mathematical Journal Vol. 44 (2015) p. 277 312 Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients Takayuki Yamaguchi (Received March 13,
Hokkaido Mathematical Journal Vol. 44 (2015) p. 277 312 Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients Takayuki Yamaguchi (Received March 13,
Inducing Chaos in the p/n Junction
 Inducing Chaos in the p/n Junction Renato Mariz de Moraes, Marshal Miller, Alex Glasser, Anand Banerjee, Ed Ott, Tom Antonsen, and Steven M. Anlage CSR, Department of Physics MURI Review 14 November, 2003
Inducing Chaos in the p/n Junction Renato Mariz de Moraes, Marshal Miller, Alex Glasser, Anand Banerjee, Ed Ott, Tom Antonsen, and Steven M. Anlage CSR, Department of Physics MURI Review 14 November, 2003
RF Upset and Chaos in Circuits: Basic Investigations. Steven M. Anlage, Vassili Demergis, Ed Ott, Tom Antonsen
 RF Upset and Chaos in Circuits: Basic Investigations Steven M. Anlage, Vassili Demergis, Ed Ott, Tom Antonsen AFOSR Presentation Research funded by the AFOSR-MURI and DURIP programs OVERVIEW HPM Effects
RF Upset and Chaos in Circuits: Basic Investigations Steven M. Anlage, Vassili Demergis, Ed Ott, Tom Antonsen AFOSR Presentation Research funded by the AFOSR-MURI and DURIP programs OVERVIEW HPM Effects
One Dimensional Dynamical Systems
 16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
BEHAVIORAL MODELING AND TRANSIENT ANALYSIS WITH ANALOG INSYDES
 BEHAVIORAL MODELING AND TRANSIENT ANALYSIS WITH ANALOG INSYDES Thomas Halfmann, Eckhard Hennig, Manfred Thole ITWM Institut für Techno- und Wirtschaftsmathematik, Kaiserslautern, Germany {halfmann, hennig,
BEHAVIORAL MODELING AND TRANSIENT ANALYSIS WITH ANALOG INSYDES Thomas Halfmann, Eckhard Hennig, Manfred Thole ITWM Institut für Techno- und Wirtschaftsmathematik, Kaiserslautern, Germany {halfmann, hennig,
Math 273 (51) - Final
 - Final") Name: Id #: Math 273 (5) - Final Autumn Quarter 26 Thursday, December 8, 26-6: to 8: Instructions: Prob. Points Score possible 25 2 25 3 25 TOTAL 75 Read each problem carefully. Write legibly. Show all
Name: Id #: Math 273 (5) - Final Autumn Quarter 26 Thursday, December 8, 26-6: to 8: Instructions: Prob. Points Score possible 25 2 25 3 25 TOTAL 75 Read each problem carefully. Write legibly. Show all
Two-Port Networks Admittance Parameters CHAPTER16 THE LEARNING GOALS FOR THIS CHAPTER ARE THAT STUDENTS SHOULD BE ABLE TO:
 CHAPTER16 Two-Port Networks THE LEARNING GOALS FOR THIS CHAPTER ARE THAT STUDENTS SHOULD BE ABLE TO: Calculate the admittance, impedance, hybrid, and transmission parameter for two-port networks. Convert
CHAPTER16 Two-Port Networks THE LEARNING GOALS FOR THIS CHAPTER ARE THAT STUDENTS SHOULD BE ABLE TO: Calculate the admittance, impedance, hybrid, and transmission parameter for two-port networks. Convert
A Memristive Diode Bridge-Based Canonical Chua s Circuit
 Entropy 014, 16, 6464-6476; doi:10.3390/e1616464 Article OPEN ACCE entropy IN 1099-4300 www.mdpi.com/journal/entropy A Memristive Diode Bridge-Based Canonical Chua s Circuit Mo Chen, Jingjing Yu, Qing
Entropy 014, 16, 6464-6476; doi:10.3390/e1616464 Article OPEN ACCE entropy IN 1099-4300 www.mdpi.com/journal/entropy A Memristive Diode Bridge-Based Canonical Chua s Circuit Mo Chen, Jingjing Yu, Qing
Fundamentals of Dynamical Systems / Discrete-Time Models. Dr. Dylan McNamara people.uncw.edu/ mcnamarad
 Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Constructing a chaotic system with any number of equilibria
 Nonlinear Dyn (2013) 71:429 436 DOI 10.1007/s11071-012-0669-7 ORIGINAL PAPER Constructing a chaotic system with any number of equilibria Xiong Wang Guanrong Chen Received: 9 June 2012 / Accepted: 29 October
Nonlinear Dyn (2013) 71:429 436 DOI 10.1007/s11071-012-0669-7 ORIGINAL PAPER Constructing a chaotic system with any number of equilibria Xiong Wang Guanrong Chen Received: 9 June 2012 / Accepted: 29 October
René Thomas Université de Bruxelles. Frontier diagrams: a global view of the structure of phase space.
 René Thomas Université de Bruxelles Frontier diagrams: a global view of the structure of phase space. We have the tools to identify and characterise steady states and trajectories. But WHY several steady
René Thomas Université de Bruxelles Frontier diagrams: a global view of the structure of phase space. We have the tools to identify and characterise steady states and trajectories. But WHY several steady
Multi-Scroll Chaotic Attractors in SC-CNN via Hyperbolic Tangent Function
 electronics Article Multi-Scroll Chaotic Attractors in SC-CNN via Hyperbolic Tangent Function Enis Günay, * and Kenan Altun ID Department of Electrical and Electronics Engineering, Erciyes University,
electronics Article Multi-Scroll Chaotic Attractors in SC-CNN via Hyperbolic Tangent Function Enis Günay, * and Kenan Altun ID Department of Electrical and Electronics Engineering, Erciyes University,
Dynamical analysis and circuit simulation of a new three-dimensional chaotic system
 Dynamical analysis and circuit simulation of a new three-dimensional chaotic system Wang Ai-Yuan( 王爱元 ) a)b) and Ling Zhi-Hao( 凌志浩 ) a) a) Department of Automation, East China University of Science and
Dynamical analysis and circuit simulation of a new three-dimensional chaotic system Wang Ai-Yuan( 王爱元 ) a)b) and Ling Zhi-Hao( 凌志浩 ) a) a) Department of Automation, East China University of Science and
Basic. Theory. ircuit. Charles A. Desoer. Ernest S. Kuh. and. McGraw-Hill Book Company
 Basic C m ш ircuit Theory Charles A. Desoer and Ernest S. Kuh Department of Electrical Engineering and Computer Sciences University of California, Berkeley McGraw-Hill Book Company New York St. Louis San
Basic C m ш ircuit Theory Charles A. Desoer and Ernest S. Kuh Department of Electrical Engineering and Computer Sciences University of California, Berkeley McGraw-Hill Book Company New York St. Louis San
Handout 2: Invariant Sets and Stability
 Engineering Tripos Part IIB Nonlinear Systems and Control Module 4F2 1 Invariant Sets Handout 2: Invariant Sets and Stability Consider again the autonomous dynamical system ẋ = f(x), x() = x (1) with state
Engineering Tripos Part IIB Nonlinear Systems and Control Module 4F2 1 Invariant Sets Handout 2: Invariant Sets and Stability Consider again the autonomous dynamical system ẋ = f(x), x() = x (1) with state
COMPLEX DYNAMICS IN HYSTERETIC NONLINEAR OSCILLATOR CIRCUIT
 THE PUBLISHING HOUSE PROCEEDINGS OF THE ROMANIAN ACADEM, Series A, OF THE ROMANIAN ACADEM Volume 8, Number 4/7, pp. 7 77 COMPLEX DNAMICS IN HSTERETIC NONLINEAR OSCILLATOR CIRCUIT Carmen GRIGORAS,, Victor
THE PUBLISHING HOUSE PROCEEDINGS OF THE ROMANIAN ACADEM, Series A, OF THE ROMANIAN ACADEM Volume 8, Number 4/7, pp. 7 77 COMPLEX DNAMICS IN HSTERETIC NONLINEAR OSCILLATOR CIRCUIT Carmen GRIGORAS,, Victor
A Two-Dimensional Chaotic Logic Gate for Improved Computer Security
 A Two-Dimensional Chaotic Logic Gate for Improved Computer Security James Bohl, Lok-Kwong Yan, and Garrett S. Rose IEEE International Midwest Symposium on Circuits and Systems (MWSCAS), Fort Collins, CO,
A Two-Dimensional Chaotic Logic Gate for Improved Computer Security James Bohl, Lok-Kwong Yan, and Garrett S. Rose IEEE International Midwest Symposium on Circuits and Systems (MWSCAS), Fort Collins, CO,
RC & RL Transient Response
 EE 2006 University of Minnesota Duluth ab 8 1. Introduction R & R Transient Response The student will analyze series R and R circuits. A step input will excite these respective circuits, producing a transient
EE 2006 University of Minnesota Duluth ab 8 1. Introduction R & R Transient Response The student will analyze series R and R circuits. A step input will excite these respective circuits, producing a transient
IMPERIAL COLLEGE OF SCIENCE, TECHNOLOGY AND MEDICINE UNIVERSITY OF LONDON DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2010
 Paper Number(s): E1.1 IMPERIAL COLLEGE OF SCIENCE, TECHNOLOGY AND MEDICINE UNIVERSITY OF LONDON DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2010 EEE/ISE PART I: MEng, BEng and ACGI
Paper Number(s): E1.1 IMPERIAL COLLEGE OF SCIENCE, TECHNOLOGY AND MEDICINE UNIVERSITY OF LONDON DEPARTMENT OF ELECTRICAL AND ELECTRONIC ENGINEERING EXAMINATIONS 2010 EEE/ISE PART I: MEng, BEng and ACGI
Simplest Chaotic Flows with Involutional Symmetries
 International Journal of Bifurcation and Chaos, Vol. 24, No. 1 (2014) 1450009 (9 pages) c World Scientific Publishing Company DOI: 10.1142/S0218127414500096 Simplest Chaotic Flows with Involutional Symmetries
International Journal of Bifurcation and Chaos, Vol. 24, No. 1 (2014) 1450009 (9 pages) c World Scientific Publishing Company DOI: 10.1142/S0218127414500096 Simplest Chaotic Flows with Involutional Symmetries
Dynamics of Two Resistively Coupled Electric Circuits of 4 th Order
 Proceedings of the 0th WSEAS International onference on IRUITS, Vouliagmeni, Athens, Greece, July 0-, 006 (pp9-96) Dynamics of Two Resistively oupled Electric ircuits of 4 th Order M. S. PAPADOPOULOU,
Proceedings of the 0th WSEAS International onference on IRUITS, Vouliagmeni, Athens, Greece, July 0-, 006 (pp9-96) Dynamics of Two Resistively oupled Electric ircuits of 4 th Order M. S. PAPADOPOULOU,
Stability of Feedback Solutions for Infinite Horizon Noncooperative Differential Games
 Stability of Feedback Solutions for Infinite Horizon Noncooperative Differential Games Alberto Bressan ) and Khai T. Nguyen ) *) Department of Mathematics, Penn State University **) Department of Mathematics,
Stability of Feedback Solutions for Infinite Horizon Noncooperative Differential Games Alberto Bressan ) and Khai T. Nguyen ) *) Department of Mathematics, Penn State University **) Department of Mathematics,
Math 312 Lecture Notes Linear Two-dimensional Systems of Differential Equations
 Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
Math 2 Lecture Notes Linear Two-dimensional Systems of Differential Equations Warren Weckesser Department of Mathematics Colgate University February 2005 In these notes, we consider the linear system of
ESE319 Introduction to Microelectronics. Output Stages
 Output Stages Power amplifier classification Class A amplifier circuits Class A Power conversion efficiency Class B amplifier circuits Class B Power conversion efficiency Class AB amplifier circuits Class
Output Stages Power amplifier classification Class A amplifier circuits Class A Power conversion efficiency Class B amplifier circuits Class B Power conversion efficiency Class AB amplifier circuits Class
On rigorous integration of piece-wise linear systems
 On rigorous integration of piece-wise linear systems Zbigniew Galias Department of Electrical Engineering AGH University of Science and Technology 06.2011, Trieste, Italy On rigorous integration of PWL
On rigorous integration of piece-wise linear systems Zbigniew Galias Department of Electrical Engineering AGH University of Science and Technology 06.2011, Trieste, Italy On rigorous integration of PWL
STABILITY ANALYSIS OF DAMPED SDOF SYSTEMS WITH TWO TIME DELAYS IN STATE FEEDBACK
 Journal of Sound and Vibration (1998) 214(2), 213 225 Article No. sv971499 STABILITY ANALYSIS OF DAMPED SDOF SYSTEMS WITH TWO TIME DELAYS IN STATE FEEDBACK H. Y. HU ANDZ. H. WANG Institute of Vibration
Journal of Sound and Vibration (1998) 214(2), 213 225 Article No. sv971499 STABILITY ANALYSIS OF DAMPED SDOF SYSTEMS WITH TWO TIME DELAYS IN STATE FEEDBACK H. Y. HU ANDZ. H. WANG Institute of Vibration
An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems
 An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems Scott Zimmerman MATH181HM: Dynamical Systems Spring 2008 1 Introduction The Hartman-Grobman and Poincaré-Bendixon Theorems
An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems Scott Zimmerman MATH181HM: Dynamical Systems Spring 2008 1 Introduction The Hartman-Grobman and Poincaré-Bendixon Theorems
Simultaneous equations for circuit analysis
 Simultaneous equations for circuit analysis This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
Simultaneous equations for circuit analysis This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
Homoclinic bifurcations in Chua s circuit
 Physica A 262 (1999) 144 152 Homoclinic bifurcations in Chua s circuit Sandra Kahan, Anibal C. Sicardi-Schino Instituto de Fsica, Universidad de la Republica, C.C. 30, C.P. 11 000, Montevideo, Uruguay
Physica A 262 (1999) 144 152 Homoclinic bifurcations in Chua s circuit Sandra Kahan, Anibal C. Sicardi-Schino Instituto de Fsica, Universidad de la Republica, C.C. 30, C.P. 11 000, Montevideo, Uruguay
Complex Dynamics of a Memristor Based Chua s Canonical Circuit
 Complex Dynamics of a Memristor Based Chua s Canonical Circuit CHRISTOS K. VOLOS Department of Mathematics and Engineering Sciences Univ. of Military Education - Hellenic Army Academy Athens, GR6673 GREECE
Complex Dynamics of a Memristor Based Chua s Canonical Circuit CHRISTOS K. VOLOS Department of Mathematics and Engineering Sciences Univ. of Military Education - Hellenic Army Academy Athens, GR6673 GREECE
SIMPLEST ODE EQUIVALENTS OF CHUA S EQUATIONS
 Tutorials and Reviews International Journal of Bifurcation and Chaos, Vol. 10, No. 1 (2000) 1 23 c World Scientific Publishing Company SIMPLEST ODE EQUIVALENTS OF CHUA S EQUATIONS JIŘÍ POSPÍŠIL, ZDENĚK
Tutorials and Reviews International Journal of Bifurcation and Chaos, Vol. 10, No. 1 (2000) 1 23 c World Scientific Publishing Company SIMPLEST ODE EQUIVALENTS OF CHUA S EQUATIONS JIŘÍ POSPÍŠIL, ZDENĚK
Appendix A Installing QUCS
 Appendix A Installing QUCS In this appendix, we will discuss how to install QUCS [1]. Note that QUCS has a lot of components, many of which we will not use. Nevertheless, we will install all components
Appendix A Installing QUCS In this appendix, we will discuss how to install QUCS [1]. Note that QUCS has a lot of components, many of which we will not use. Nevertheless, we will install all components
Nonlinear Dynamics of Chaotic Attractor of Chua Circuit and Its Application for Secure Communication
 Nonlinear Dynamics of Chaotic Attractor of Chua Circuit and Its Application for Secure Communication 1,M. Sanjaya WS, 1 D.S Maulana, M. Mamat & Z. Salleh 1Computation and Instrumentation Division, Department
Nonlinear Dynamics of Chaotic Attractor of Chua Circuit and Its Application for Secure Communication 1,M. Sanjaya WS, 1 D.S Maulana, M. Mamat & Z. Salleh 1Computation and Instrumentation Division, Department
EE5900 Spring Lecture 5 IC interconnect model order reduction Zhuo Feng
 EE59 Spring Parallel VLSI CAD Algorithms Lecture 5 IC interconnect model order reduction Zhuo Feng 5. Z. Feng MU EE59 In theory we can apply moment matching for any order of approximation But in practice
EE59 Spring Parallel VLSI CAD Algorithms Lecture 5 IC interconnect model order reduction Zhuo Feng 5. Z. Feng MU EE59 In theory we can apply moment matching for any order of approximation But in practice
AN EQUATION FOR GENERATING CHAOS AND ITS MONOLITHIC IMPLEMENTATION
 International Journal of Bifurcation and Chaos, Vol. 2, No. 2 (22) 2885 2895 c World Scientific Publishing Company AN EQUATION FOR GENERATING CHAOS AND ITS MONOLITHIC IMPLEMENTATION A. S. ELWAKIL Department
International Journal of Bifurcation and Chaos, Vol. 2, No. 2 (22) 2885 2895 c World Scientific Publishing Company AN EQUATION FOR GENERATING CHAOS AND ITS MONOLITHIC IMPLEMENTATION A. S. ELWAKIL Department
Simple conservative, autonomous, second-order chaotic complex variable systems.
 Simple conservative, autonomous, second-order chaotic complex variable systems. Delmar Marshall 1 (Physics Department, Amrita Vishwa Vidyapeetham, Clappana P.O., Kollam, Kerala 690-525, India) and J. C.
Simple conservative, autonomous, second-order chaotic complex variable systems. Delmar Marshall 1 (Physics Department, Amrita Vishwa Vidyapeetham, Clappana P.O., Kollam, Kerala 690-525, India) and J. C.
Controlling a Novel Chaotic Attractor using Linear Feedback
 ISSN 746-7659, England, UK Journal of Information and Computing Science Vol 5, No,, pp 7-4 Controlling a Novel Chaotic Attractor using Linear Feedback Lin Pan,, Daoyun Xu 3, and Wuneng Zhou College of
ISSN 746-7659, England, UK Journal of Information and Computing Science Vol 5, No,, pp 7-4 Controlling a Novel Chaotic Attractor using Linear Feedback Lin Pan,, Daoyun Xu 3, and Wuneng Zhou College of
A new class of chaotic circuit
 14 February 000. Physics Letters A 66 000 19 3 www.elsevier.nlrlocaterphysleta A new class of chaotic circuit J. C. Sprott ) Department of Physics, UniÕersity of Wisconsin, Madison, WI 53706, USA Received
14 February 000. Physics Letters A 66 000 19 3 www.elsevier.nlrlocaterphysleta A new class of chaotic circuit J. C. Sprott ) Department of Physics, UniÕersity of Wisconsin, Madison, WI 53706, USA Received
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
B5.6 Nonlinear Systems 4. Bifurcations Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Local bifurcations for vector fields 1.1 The problem 1.2 The extended centre
Single amplifier biquad based inductor-free Chua s circuit
 Nonlinear Dynamics manuscript No. (will be inserted by the editor) Single amplifier biquad based inductor-free Chua s circuit Tanmoy Banerjee After the advent of chaotic Chua s circuit, a large number
Nonlinear Dynamics manuscript No. (will be inserted by the editor) Single amplifier biquad based inductor-free Chua s circuit Tanmoy Banerjee After the advent of chaotic Chua s circuit, a large number
16 Period doubling route to chaos
 16 Period doubling route to chaos We now study the routes or scenarios towards chaos. We ask: How does the transition from periodic to strange attractor occur? The question is analogous to the study of
16 Period doubling route to chaos We now study the routes or scenarios towards chaos. We ask: How does the transition from periodic to strange attractor occur? The question is analogous to the study of
Physics 116A Notes Fall 2004
 Physics 116A Notes Fall 2004 David E. Pellett Draft v.0.9 Notes Copyright 2004 David E. Pellett unless stated otherwise. References: Text for course: Fundamentals of Electrical Engineering, second edition,
Physics 116A Notes Fall 2004 David E. Pellett Draft v.0.9 Notes Copyright 2004 David E. Pellett unless stated otherwise. References: Text for course: Fundamentals of Electrical Engineering, second edition,
LECTURE 8: DYNAMICAL SYSTEMS 7
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
An Analogue Circuit to Study the Forced and Quadratically Damped Mathieu-Duffing Oscillator
 Progress in Nonlinear Dynamics and Chaos Vol. 4, No. 1, 216, 1-6 ISSN: 2321 9238 (online) Published on 27 February 216 www.researchmathsci.org Progress in An Analogue Circuit to Study the Forced and Quadratically
Progress in Nonlinear Dynamics and Chaos Vol. 4, No. 1, 216, 1-6 ISSN: 2321 9238 (online) Published on 27 February 216 www.researchmathsci.org Progress in An Analogue Circuit to Study the Forced and Quadratically