Tutorial on Surface Ricci Flow, Theory, Algorithm and Application
|
|
|
- Elvin Terry
- 6 years ago
- Views:
Transcription
1 Tutorial on Surface Ricci Flow, Theory, Algorithm and Application 1 1 Department of Computer Science University of New York at Stony Brook Graduate Summer School: Computer Vision, IPAM, UCLA
2 Collaborators The work is collaborated with Shing-Tung Yau, Feng Luo, Ronald Lok Ming Lui and many other mathematicians, computer scientists and medical doctors.

3 Books The theory, algorithms and sample code can be found in the following books. You can find them in the book store. Ricci Flow for Shape Analysis and Surface Registration - Theories, Algorithms and Applications, Springer, 2013.
4 Lecture Notes 1 Detailed lecture notes can be found at: gu/lectures/index.html 2 Binary code and demos can be found at: gu/software/index.html 3 Source code and data sets: gu/software/index.html
 and (S 2,g 2 ) are two surfaces")

5 Conformal Mapping Definition (Conformal Mapping) Suppose (S 1,g 1 ) and (S 2,g 2 ) are two surfaces with Riemannian metrics. A conformal mapping φ : S 1 S 2 is a diffeomorphism, such that φ g 2 = e 2λ g 1.
6 Conformal Mapping Properties Conformal mappings preserve infinitesimal circles, and preserve angles.
 Let (Σ, g)")




7 Uniformization Theorem (Poincaré Uniformization Theorem) Let (Σ, g) be a compact 2-dimensional Riemannian manifold. Then there is a metric g=e 2λ g conformal to g which has constant Gauss curvature. Spherical Euclidean Hyperbolic

8 Uniformization Theorem (Poincaré Uniformization Theorem) Let (Σ, g) be a compact 2-dimensional Riemannian manifold with finite number of boundary components. Then there is a metric g conformal to g which has constant Gauss curvature, and constant geodesic curvature.
9 Yamabe Problem
 is an isothermal coordinate system, if g=e 2λ(u,v) (du 2 + dv 2 ).")
10 Isothermal Coordinates Relation between conformal structure and Riemannian metric Isothermal Coordinates A surface M with a Riemannian metric g, a local coordinate system (u,v) is an isothermal coordinate system, if g=e 2λ(u,v) (du 2 + dv 2 ).
11 Gaussian Curvature Gaussian Curvature Suppose ḡ=e 2λ g is a conformal metric on the surface, then the Gaussian curvature on interior points are K = Δ g λ = 1 e 2λΔλ, where Δ= 2 u v 2

12 Conformal Metric Deformation Definition Suppose M is a surface with a Riemannian metric, ( ) g11 g g= 12 g 21 g 22 Suppose λ :Σ R is a function defined on the surface, then e 2λ g is also a Riemannian metric on Σ and called a conformal metric. λ is called the conformal factor. g e 2λ g Angles are invariant measured by conformal metrics. Conformal metric deformation.
13 Curvature and Metric Relations Yamabi Equation Suppose ḡ=e 2λ g is a conformal metric on the surface, then the Gaussian curvature on interior points are K = e 2λ ( Δ g λ + K), geodesic curvature on the boundary k g = e λ ( n λ + k g ).
14 Surface Ricci Flow
15 Surface Ricci Flow Key Idea Because K = Δ g λ, Let then dk dt dλ dt = K, =Δ g K + 2K 2 Nonlinear heat equation! When t, K( ) constant.
16 Surface Ricci Flow Definition (Hamilton s Normalized Surface Ricci Flow) A closed surface S with a Riemannian metric g, the Ricci flow on it is defined as dg ij dt = 4πχ(S) A(0) 2Kg ij. where χ(s) is the Euler characteristic number of the surface S, A(0) is the total area at time 0. The total area of the surface is preserved during the normalized Ricci flow flow. The Ricci flow will converge to a metric such that the Gaussian curvature is constant every where, K( ) 2πχ(S). A(0)
17 Surface Ricci Flow Furthermore, the normalized surface Ricci flow dg ij dt = 4πχ(S) A(0) 2Kg ij. is conformal, g(t)=e 2u(t) g(0), where u(t):s R is a the conformal factor function, and the normalized Surface Ricci flow can be written as for every point p S. du(p, t) dt = 2πχ(S) A(0) K(p,t),
18 Ricci Flow Theorem (Hamilton 1982) For a closed surface of non-positive Euler characteristic, if the total area of the surface is preserved during the flow, the Ricci flow will converge to a metric such that the Gaussian curvature is constant (equals to K ) every where. Theorem (Bennett Chow) For a closed surface of positive Euler characteristic, if the total area of the surface is preserved during the flow, the Ricci flow will converge to a metric such that the Gaussian curvature is constant (equals to K ) every where.
19 Summary Surface Ricci Flow Conformal metric deformation g e 2u g Curvature Change - heat diffusion dk dt =Δ g K + 2K 2 Ricci flow du dt = K K.
20 Discrete Surface Ricci Flow
21 Generic Surface Model - Triangular Mesh Surfaces are represented as polyhedron triangular meshes. Isometric gluing of triangles in E 2. Isometric gluing of triangles in H 2,S 2.
22 Generic Surface Model - Triangular Mesh Surfaces are represented as polyhedron triangular meshes. Isometric gluing of triangles in E 2. Isometric gluing of triangles in H 2,S 2.


23 Generic Surface Model - Triangular Mesh Surfaces are represented as polyhedron triangular meshes. Isometric gluing of triangles in E 2. Isometric gluing of triangles in H 2,S 2.
24 Discrete Generalization Concepts 1 Discrete Riemannian Metric 2 Discrete Curvature 3 Discrete Conformal Metric Deformation


25 Discrete Metrics Definition (Discrete Metric) A Discrete Metric on a triangular mesh is a function defined on the vertices, l : E ={all edges} R +, satisfies triangular inequality. A mesh has infinite metrics.
26 Discrete Curvature Definition (Discrete Curvature) Discrete curvature: K : V ={vertices} R 1. K(v)=2π i α i,v M;K(v)=π α i,v M i Theorem (Discrete Gauss-Bonnet theorem) K(v)+ K(v)=2πχ(M). v M v M v α 1 α 2 α 3 α 1 α2 v
27 Discrete Metrics Determines the Curvatures l j θ i v i cosine laws v k v k θ k l i lj θ l j k li θ θ i θ j j v i l k v l j v k i v j θ i θ k θ j R 2 H2 S 2 l k v k l i v j cosl i = cosθ i + cosθ j cosθ k sinθ j sinθ k (1) coshl i = coshθ i+ coshθ j coshθ k sinhθ j sinhθ k (2) 1 = cosθ i + cosθ j cosθ k sinθ j sinθ k (3)
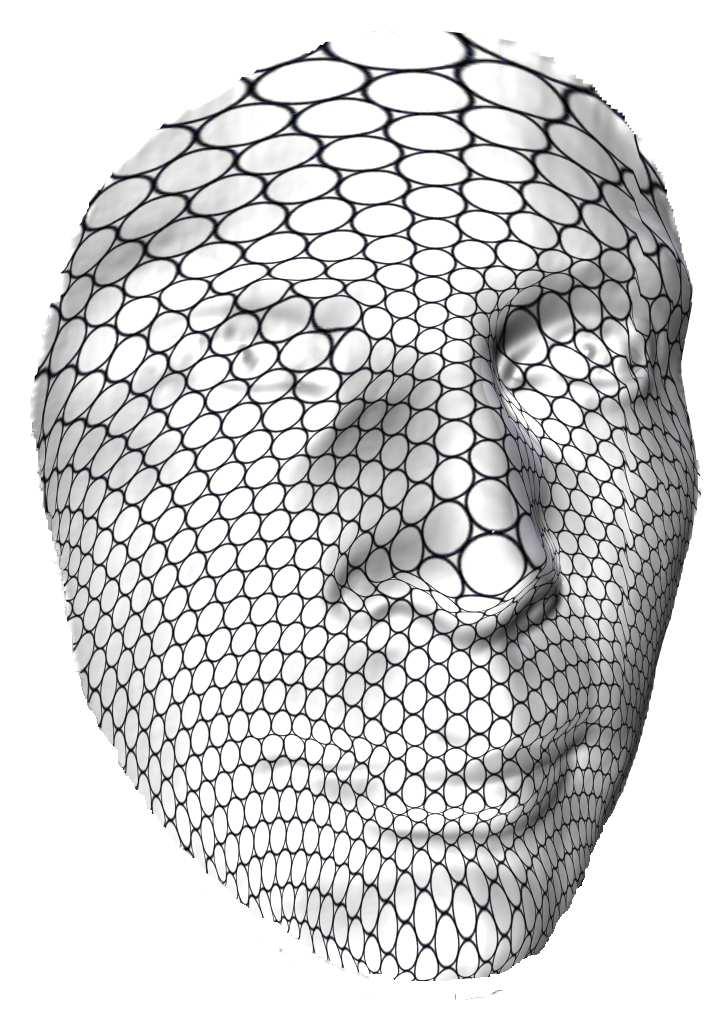
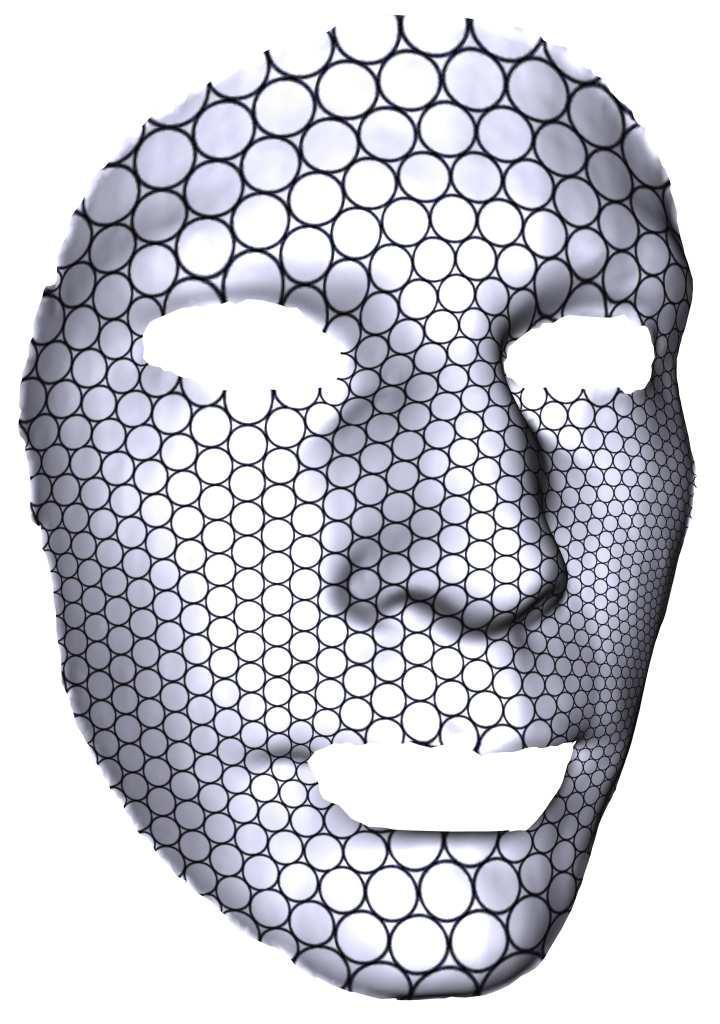
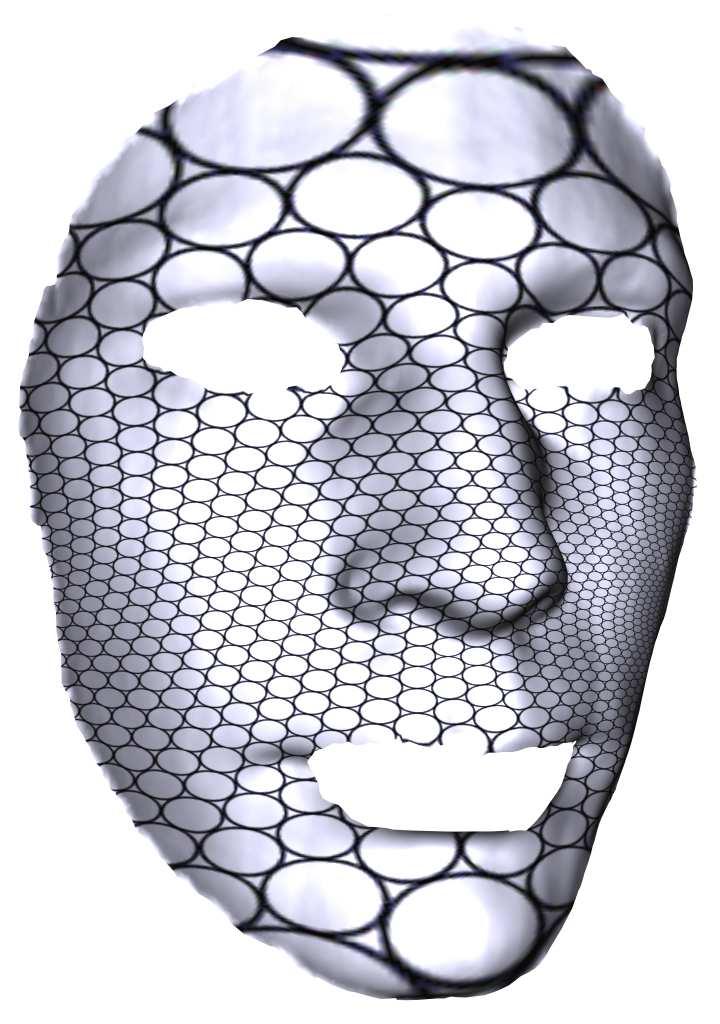
28 Discrete Conformal Metric Deformation Conformal maps Properties transform infinitesimal circles to infinitesimal circles. preserve the intersection angles among circles. Idea - Approximate conformal metric deformation Replace infinitesimal circles by circles with finite radii.
29 Discrete Conformal Metric Deformation vs CP
, Σ triangulation, Γ={γ i v i")
30 Circle Packing Metric CP Metric We associate each vertex v i with a circle with radius γ i. On edge e ij, the two circles intersect at the angle of Φ ij. The edge lengths are φ12 φ r 1 v 31 1 e 12 e 31 e23 v 2 v 3 r 2 φ 23 r 3 l 2 ij = γ 2 i + γ 2 j + 2γ i γ j cosφ ij CP Metric (Σ,Γ,Φ), Σ triangulation, Γ={γ i v i },Φ={φ ij e ij }
31 Discrete Conformal Factor Conformal Factor Defined on each vertex u:v R, logγ i R 2 u i = logtanh γ i 2 H 2 logtan γ i 2 S 2 Properties Symmetry Discrete Laplace Equation K i u j = K j u i dk=δdu, Δ is a discrete Lapalce-Beltrami operator.
32 Unified Framework of Discrete Curvature Flow Analogy Curvature flow Energy E(u)= Hessian of E denoted as Δ, du dt = K K, ( K i K i )du i, i dk=δdu.
33 Criteria for Discretization Key Points Convexity of the energy E(u) Convexity of the metric space (u-space) Admissible curvature space (K-space) Preserving or reflecting richer structures Conformality
34 Hyperbolic Ricci Flow
35 Hyperbolic Yamabe Flow a 2 b1 a 1 1 a1 b 1 b 1 1 b 1 2 b 2 a 1 a2 a 1 2 b2
36 Convergence and Uniqueness of discrete Ricci flow
37 Cosine law v k l j θ k l i 2l j l k cosθ i = lj 2 + lk 2 l2 i θ i θ j dθ 2l j l k sinθ i i dl i = 2l i v i l k A=l j l k sinθ i v j dθ i dl i = l i A
38 Cosine law v k 2l j l k cosθ i = lj 2 + lk 2 l2 i 2l j = 2l k cosθ i l j θ k l i 2l j l k sin θ i dθ i dl j v i θ i l k θ j v j dθ i dl j = l k cosθ i l j A l j = l i cosθ k + l k cosθ i = l i cosθ k A = dθ i dl i cosθ k
39 Cosine law τ ki v i l j θ i θ k v k l k τ ij l i θ j τ jk l 2 k = r 2 i + r 2 j + 2cosτ ij r i r j v j 2l i dl i dr j l 2 i = r 2 j + r 2 k + 2r jr k cosτ jk = 2r j + 2r k cosτ jk dl i = 2r j 2 + 2r j r k cosτ jk dr j 2l i r j = r j 2 + rk 2+ 2r jr k cosτ jk + rj 2 2l i r j = l2 i + r 2 j r 2 k 2l i r j
40 Cosine law Let u i = logr i, then dθ 1 dθ 2 dθ 3 0 = 1 A l l l 3 l1 2+r 2 2 r 3 2 l1 2+r 3 2 r 2 2 2l 1 r 2 2l 1 r 3 l2 2+r 1 2 r 3 2 2l 2 r 1 0 l3 2+r 1 2 r 2 2 l3 2+r 2 2 r 1 2 2l 3 r 1 2l 3 r 2 0 l 2 2 +r 2 3 r 2 1 2l 2 r 3 1 cosθ 3 cosθ 2 cosθ 3 1 cosθ 1 cosθ 2 cosθ 1 1 r r r 3 du 1 du 2 du 3
41 Cosine law τ ki v i l j θ i v k θ k w k l k τ jk l i θ φ j ji d ji v j 2l k dl k dr j = 2r j + 2r i cosτ ij dl r k j = 2r j 2 + 2r i r j cosτ ij dr j 2l k = l2 k + r j 2 ri 2 2l k In triangle [v i,v j,w k ], τ ij l 2 k = r 2 i + r 2 j + 2cosτ ij r i r j dl k = 2 l kr j cosφ ji = r j cosφ ji = d ji du j 2l k
42 Cosine law τ ki v i l j θ i h j There is a unique circle orthogonal to three circles (v i,r i ), the center is o, the distance from o to edge [v i,v j ] is h k. θ k v k τ ij l k h i o h k l i τ jk θ j v j Theorem dθ i du j dθ j du k dθ k du i = dθ j du i = h k l k = dθ k du j = h i l i = dθ i du k = h j l j
43 Cosine law Proof. τ ki l j v k θ k h i o l i d τ jk d jk θ i u j = θ i l i l i u j + θ i l k l k u j = θ i l i ( l i u j l k u j cosθ j ) v i θ i h k θ j l k d ji θ j v j = l i A (d jk d ji cosθ j ) dl = i l i l k sinθ j τ ij dθ i du j = h k l k = h k sinθ j l k sin θ j = h k l k
44 Cosine law v j v i,v j v i u j = 2 v j u j,v j v i τ ki v i l j θ i v k θ k h k l k h i o τ jk l i d jk θ j d ji v j l 2 k u j l k u j d ji = 2 v j u j,v j v i = v j u j, v j v i l k = v j u j, v j v i l k τ ij Similarly v j u j = v j o So v j u j = v j 0. d jk = v j u j, v j v k l i
45 Metric Space τki vk τjk Lemma For any three obtuse angles τ ij,τ jk,τ ki [0, π 2 ) and any three positive numbers r 1,r 2 and r 3, there is a configuration of 3 circles in Euclidean geometry, unique upto isometry, having radii r i and meeting in angles τ ij. lj hj θk hi o li Proof. θi hk θj vi lk vj max{r 2 i,r 2 j }<r 2 i +r 2 j +2r i r j cosτ ij (r i +r j ) 2 τij so max{r 2 i,r 2 j }<l k r i + r j l k r i + r j < l i + l j.
46 Discrete Ricci Energy Lemma ω is closed 1-form in Ω:={(u 1,u 2,u 3 ) R 3 }. τki vi vk θk hi lj hj o hk θi lk τjk li θj vj Because θ i u j dω = θ j u i, so = ( θ i u j θ j u i )du j du i + τij ( θ j u k θ k u j )du k du j + ω = θ i du i +θ j du j +θ k du j ( θ k θ i )du i du k u i u k = 0.
47 Discrete Ricci Energy τki vi lj θi hj θk vk lk hi o hk li τjk θj vj Lemma The Ricci energy E(u 1,u 2,u 3 ) is well defined. Because Ω=R 3 is convex, closed 1-form is exact, therefore E(u 1,u 2,u 3 ) is well defined. τij (u1,u 2,u 3 ) E(u 1,u 2,u 3 )= ω (0,0,0)
48 Discrete Ricci Energy τki vi lj θi hj θk vk τij (u1,u 2,u 3 ) E(u 1,u 2,u 3 )= ω (0,0,0) lk hi o hk li τjk θj vj Lemma The Ricci energy E(u 1,u 2,u 3 ) is strictly concave on the subspace u 1 + u 2 + u 3 = 0. The gradient E =(θ 1,θ 2,θ 3 ), the Hessian matrix is H = θ 1 u 1 θ 1 u 2 θ 1 u 3 θ 2 u 1 θ 2 u 2 θ 2 u 3 θ 3 u 1 θ 3 u 2 θ 3 u 3 because of θ 1 + θ 2 + θ 3 = π, θ i u i = θ i u j θ i u k = θ j u i θ k u i
49 Ricci energy Proof. H = h 3 l3 + h 2 l2 h 3 l3 h 2 l2 h 3 h 3 l3 l3 + h 1 l1 h 1 l1 h 2 l2 h 1 h 2 l1 l2 + h 1 l1 H is diagonal dominant, it has null space (1, 1, 1), on the subspace u 1 + u 2 + u 3 = 0, it is strictly negative definite. Therefore the discrete Ricci energy E(u 1,u 2,u 3 ) is strictly concave.
50 Discrete Ricci Energy Lemma The Ricci energy E(u) is strictly convex on the subspace vi M u i = 0. ω = K i du i v i M E(u)= M u 0 ω. M The gradient E =(K 1,K 2,,K n ). The Ricci energy E(u)=2π v i M u i [v i,v j,v k ] M E ijk (u i,u j,u k ) where E ijk is the ricci energy defined on the face [v i,v j,v k ]. The linear term won t affect the convexity of the energy. The null space of the Hessian is (1,1,,1). In the subspace u i = 0, the energy is strictly convex.
51 Uniqueness Lemma Suppose Ω R n is a convex domain, f :Ω R is a strictly convex function, then the map is one-to-one. Proof. x f(x) Suppose x 1 = x 2, f(x 1 )= f(x 2 ). Because Ω is convex, the line segment (1 t)x 1 + tx 2 is contained in Ω. construct a convex function g(t)=f((1 t)x 1 + tx 2 ), then g (t) is monotonous. But g (0)= f(x 1 ),x 2 x 1 = f(x 2 ),x 2 x 1 =g (1), contradiction.
52 Uniqueness x f(x) f(x) f(x) x 2 x 1 Ω Lemma Suppose Ω R n is a convex domain, f :Ω R is a strictly convex function, then the map x f(x) is one-to-one.
53 Uniqueness Theorem Suppose M is a mesh, with circle packing metric, all edge intersection angles are non-obtuse. Given the target curvature (K 1,K 2,,K n ), i K i = 2πχ(M). If the solution (u 1,u 2,,u n ) Ω(M), i u i = 0 exists, then it is unique. Proof. The discrete Ricci energy E on Ω { i u i = 0} is convex, E(u 1,u 2,,u n )=(K 1,K 2, K n ). Use previous lemma.
54 Thurston s Circle Packing Metric CP Metric We associate each vertex v i with a circle with radius γ i. On edge e ij, the two circles intersect at the angle of Φ ij. The edge lengths are vk dki wj Ck dkj wi hi C0 l 2 ij = γ 2 i + γ 2 j + 2γ i γ j η ij Ci dik vi hj dij o hk wk djk dji vj Cj CP Metric (Σ,Γ,η), Σ triangulation, lij Γ={γ i v i },η ={η ij < 1 e ij }
55 Tangential Circle Packing Metric Tangential CP Metric equivalently l 2 ij = γ 2 i + γ 2 j + 2γ i γ j, w j d h j ik C 0 d ij η ij 1. C i v i v j r i d ki v k o h i h k r k d kj w k d ji C k w i d jk r j C
56 Inversive Distance Circle Packing Metric Tangential CP Metric v k C k l 2 ij = γ 2 i + γ 2 j + 2η ij γ i γ j, equivalently d η ij > 1. v ij d ji i v j C i d ik w j d ki h j h k d kj o w k l ij h i w i d jk C 0 C
57 Yamabe Flow v k d ki d kj C 0 Yamabe Flow l 2 ij = η ij γ i γ j, w j d ik v i h j d ij o h i h k w k w i d ji d jk v
58 Imaginary Radius Circle Packing Metric Imaginary Radius Circle Packing Metric l 2 ij = γ 2 i γ 2 j + 2η ij γ i γ j, v i r i d ki w j r k v k h j d ki o h i d ij d kj hk w k w i d ji d jk r j v j C
59 Mixed Type v k Mixed Circle Packing l 2 ij = α i γ 2 i + α j γ 2 j + 2η ij γ i γ j, (α i,α j,α k )=(+1, 1,0) v i v j d ik d ij l j d ki h j h k l k o h i d kj d ji l i d jk

60 Geometric Interpretation - Discrete Entropy Energy Ck vk dki dkj wj hi wi C0 Ci dik hj o hk djk vi dij wk dji vj Cj lij
61 Geometric Interpretation - Discrete Entropy Energy Ck vk dki dkj wj hi wi C0 Ci dik hj o hk djk vi dij wk dji vj Cj lij

62 Geometric Interpretation - Discrete Entropy Energy Ck vk rk dki dkj ri wj hj dik C0 o hi hk wi djk rj Ci vi dij wk dji vj Cj

63 Geometric Interpretation - Discrete Entropy Energy Ck vk rk dki dkj ri wj hj dik C0 o hi hk wi djk rj Ci vi dij wk dji vj Cj

64 Geometric Interpretation - Discrete Entropy Energy v k θ jk θ ki α k θ ki θ jk α i α j v i θ ij θ ij v j

65 Geometric Interpretation - Discrete Entropy Energy v k θ jk θ ki α k θ ki θ jk α i α j v i θ ij θ ij v j

66 Geometric Interpretation - Discrete Entropy Energy v k θ ki θ jk α k θ ki v i α i θ ij θ jk α j θ ij v j

67 Geometric Interpretation - Discrete Entropy Energy v k θ ki θ jk α k θ ki v i α i θ ij θ jk α j θ ij v j

68 Geometric Interpretation - Discrete Entropy Energy θ jk θ ki v k α k θ ij v i α i α j v j θ ij θ ki θ jk

69 Geometric Interpretation - Discrete Entropy Energy θ jk θ ki v k α k θ ij v i α i α j v j θ ij θ ki θ jk
70 Ricci Flow Algorithm
71 Ricci Flow Algorithm Use Newton s method to minimize the discrete Ricci energy, E(u 1,u 2,,u n )= The gradient of the energy is n i=1 u K i u i E(u)= K K(u), The Hessian matrix is given by H =(h ij ), h ij = 0 n i=1 w ij [v i,v j ] M k w ik i = j 0 otherwise K i du i,
72 Ricci Flow Algorithm 1 Compute initial circle packing metric, determine the circle radii γ i for each vertex v i and intersection angles ϕ ij for each edge [v i,v j ]. 2 Determine the target curvature K i for each vertex, 3 Compute the discrete metric (edge length) 4 Compute the discrete curvature K i 5 Compute the power circle of each face, compute the Hessian matrix H 6 Solve linear system K K=Hδu 7 Update the vertex radii γ i +=δu i 8 Repeat step 2 through 7, until the curvature is close enough to the target curvature.
73 Ricci Flow Algorithm Topological Quadrilateral p 4 p 3 p 1 p 2 Target curvatures at the corners: π 2, and 0 everywhere else.


74 Conformal Canonical Forms Topological Quadrilateral p 4 p 3 p 1 p 2 p 4 p 3 p 1 p 2
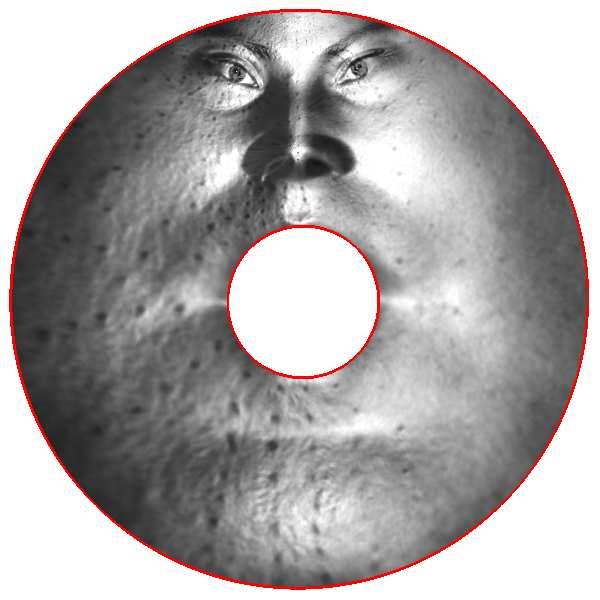

75 Topological Annulus Target curvature to be zeros everywhere, composed with e z




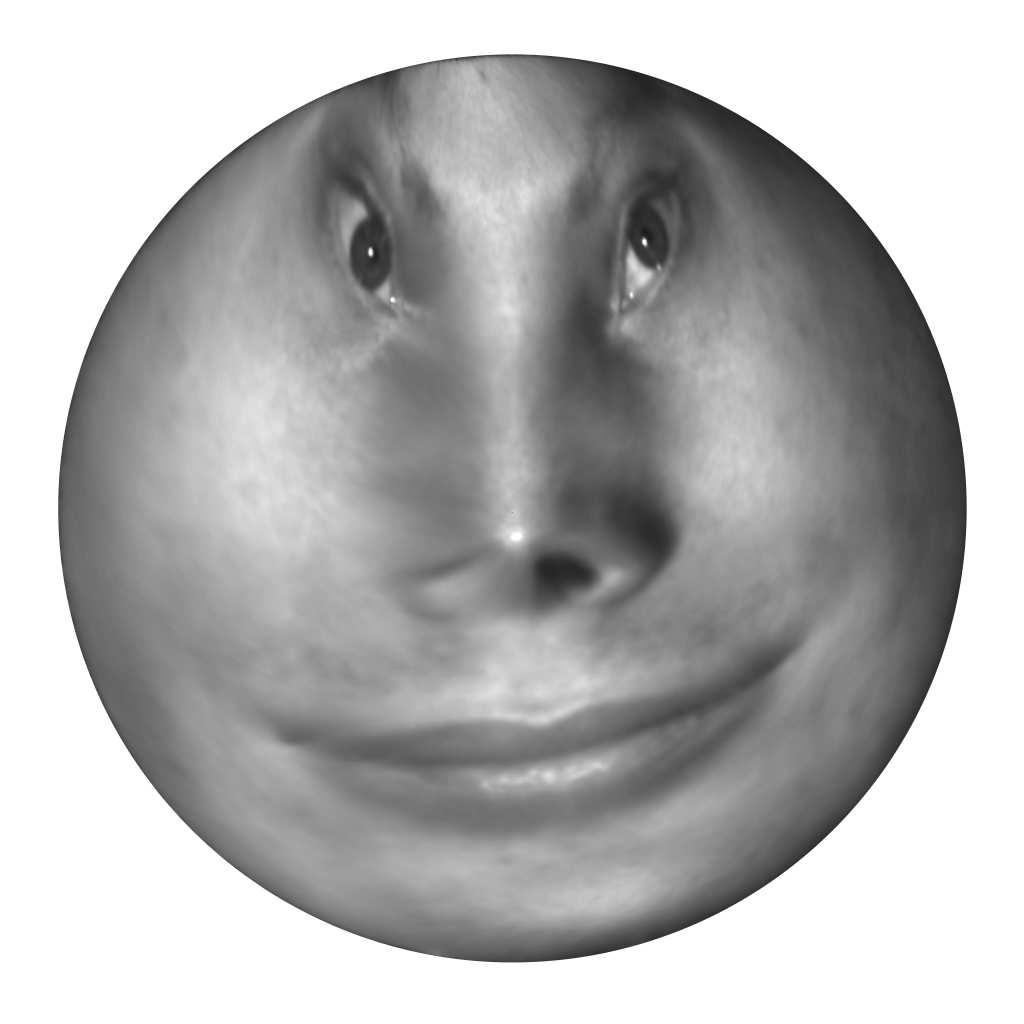
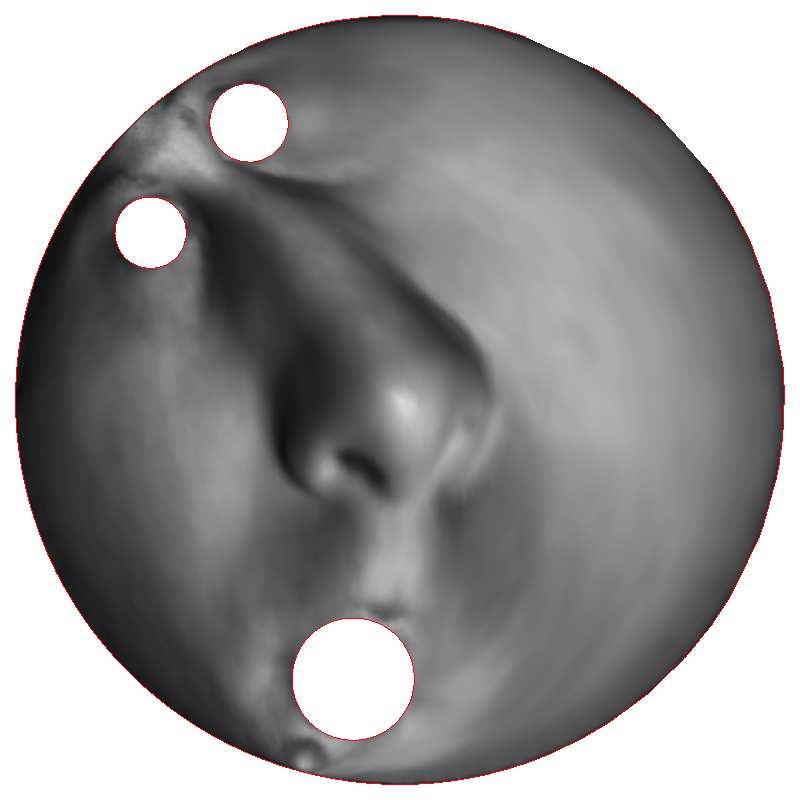
76 Topological Disk Punch a hole to an annulus


77 Multiply Connected Domains Zero interior curvature, constant boundary curvature



78 Multiply Connected Domains Total curvature for inner boundary is 2π



79 Conformal Canonical Forms Multiply Connected Domains

80 Topological Torus Zero target curvature everywhere



81 Topological Torus with holes constant boundary curvature with total 2π
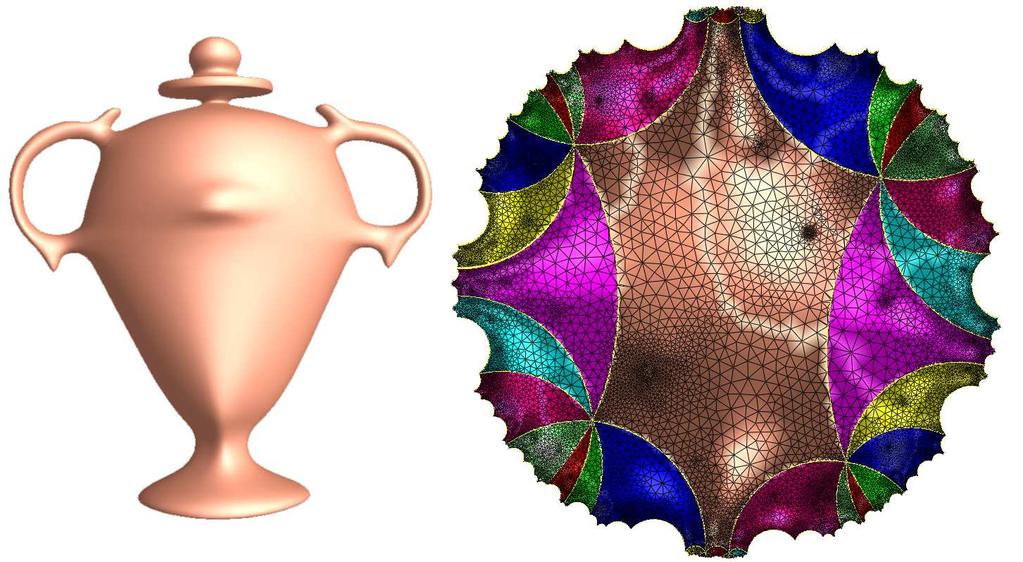
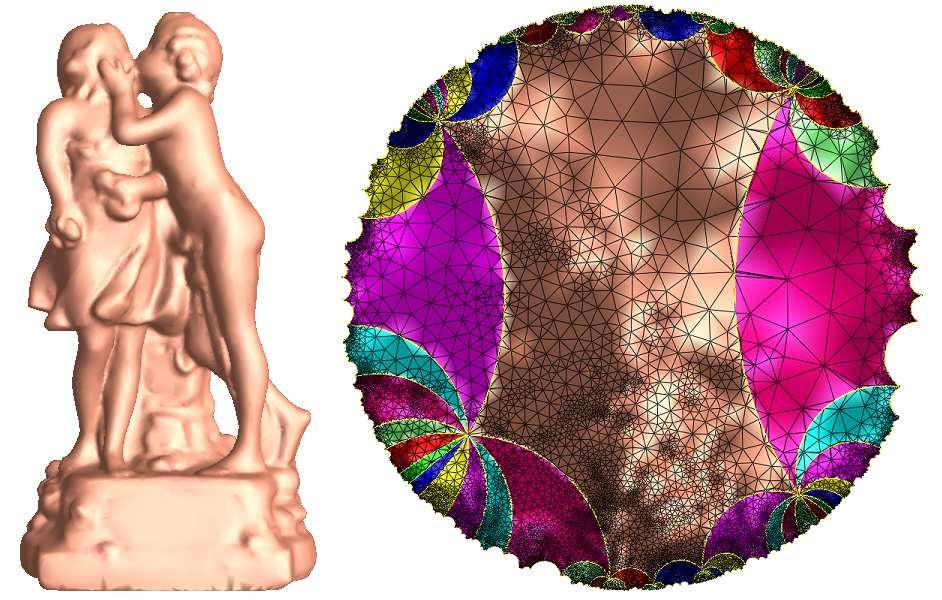
82 High genus surfaces Zero Target Curvature Everywhere using hyperbolic Ricci flow a 2 b1 a 1 1 a1 b 1 b 1 1 b 1 2 b 2 a 1 a2 a2 1 b2

83 High Genus Surface with holes Zero interior curvature, constant boundary curvature


84 Topological Pants Genus 0 surface with 3 boundaries. The double covered surface is of genus 2. The boundaries are mapped to hyperbolic lines.




85 Conformal Module Topological Pants - 3D γ 1 γ 2 γ 0 γ 0 τ 2 γ 0 2 τ0 γ1 2 γ1 τ0 γ 1 2 τ 1 τ 22 γ2 2 τ1 τ2 2 γ2 2 τ1 τ 0 τ 22 γ0 2 γ0 2 γ 1 2 τ 1 τ 2 γ 0 2
86 Quasi-Conformal Maps


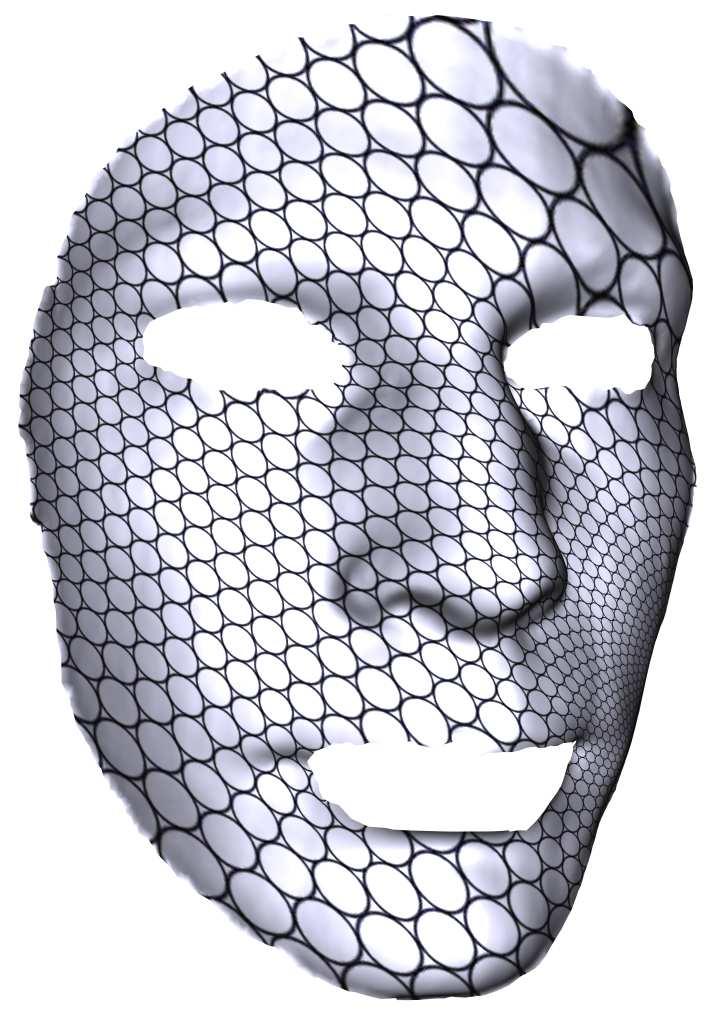
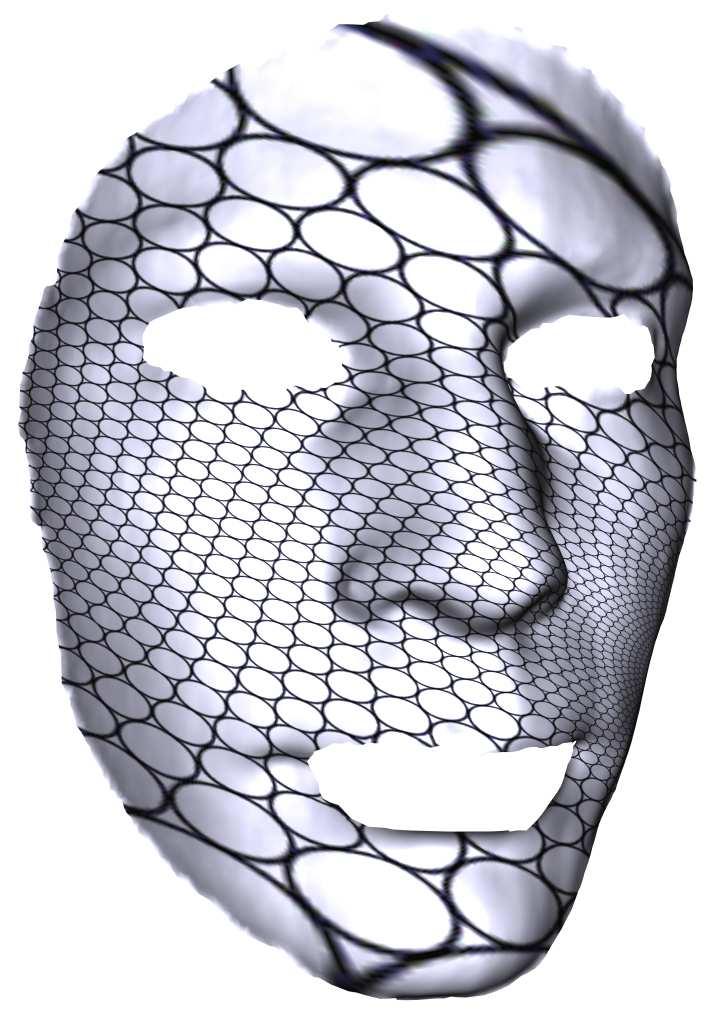
87 Quasi-Conformal Map Most homeomorphisms are quasi-conformal, which maps infinitesimal circles to ellipses.

88 Beltrami-Equation Beltrami Coefficient Let φ : S 1 S 2 be the map, z,w are isothermal coordinates of S 1, S 2, Beltrami equation is defined as µ < 1 φ z = µ(z) φ z
89 Solving Beltrami Equation The problem of computing Quasi-conformal map is converted to compute a conformal map. Solveing Beltrami Equation Given metric surfaces (S 1,g 1 ) and (S 2,g 2 ), let z,w be isothermal coordinates of S 1,S 2,w = φ(z). Then g 1 = e 2u 1 dzd z (4) g 2 = e 2u 2 dwd w, (5) φ :(S 1,g 1 ) (S 2,g 2 ), quasi-conformal with Beltrami coefficient µ. φ :(S 1,φ g 2 ) (S 2,g 2 ) is isometric φ g 2 = e u 2 dw 2 = e u 2 dz+ µddz 2. φ :(S 1, dz+ µd z 2 ) (S 2,g 2 ) is conformal.


90 Quasi-Conformal Map Examples D3 D2 D0 p q p q D1 D3 D2 D0 p q D1

91 Quasi-Conformal Map Examples

92 Solving Beltrami Equation
93 Summary Theory of discrete surface Ricci flow Algorithm for discrete surface Ricci flow Application for surface uniformization

94 Thanks For more information, please to Thank you!
Discrete Euclidean Curvature Flows
 Discrete Euclidean Curvature Flows 1 1 Department of Computer Science SUNY at Stony Brook Tsinghua University 2010 Isothermal Coordinates Relation between conformal structure and Riemannian metric Isothermal
Discrete Euclidean Curvature Flows 1 1 Department of Computer Science SUNY at Stony Brook Tsinghua University 2010 Isothermal Coordinates Relation between conformal structure and Riemannian metric Isothermal
Riemann Surface. David Gu. SMI 2012 Course. University of New York at Stony Brook. 1 Department of Computer Science
 Riemann Surface 1 1 Department of Computer Science University of New York at Stony Brook SMI 2012 Course Thanks Thanks for the invitation. Collaborators The work is collaborated with Shing-Tung Yau, Feng
Riemann Surface 1 1 Department of Computer Science University of New York at Stony Brook SMI 2012 Course Thanks Thanks for the invitation. Collaborators The work is collaborated with Shing-Tung Yau, Feng
Hyperbolic Discrete Ricci Curvature Flows
 Hyperbolic Discrete Ricci Curvature Flows 1 1 Mathematics Science Center Tsinghua University Tsinghua University 010 Unified Framework of Discrete Curvature Flow Unified framework for both Discrete Ricci
Hyperbolic Discrete Ricci Curvature Flows 1 1 Mathematics Science Center Tsinghua University Tsinghua University 010 Unified Framework of Discrete Curvature Flow Unified framework for both Discrete Ricci
Part IB Geometry. Theorems. Based on lectures by A. G. Kovalev Notes taken by Dexter Chua. Lent 2016
 Part IB Geometry Theorems Based on lectures by A. G. Kovalev Notes taken by Dexter Chua Lent 2016 These notes are not endorsed by the lecturers, and I have modified them (often significantly) after lectures.
Part IB Geometry Theorems Based on lectures by A. G. Kovalev Notes taken by Dexter Chua Lent 2016 These notes are not endorsed by the lecturers, and I have modified them (often significantly) after lectures.
Euler Characteristic of Two-Dimensional Manifolds
 Euler Characteristic of Two-Dimensional Manifolds M. Hafiz Khusyairi August 2008 In this work we will discuss an important notion from topology, namely Euler Characteristic and we will discuss several
Euler Characteristic of Two-Dimensional Manifolds M. Hafiz Khusyairi August 2008 In this work we will discuss an important notion from topology, namely Euler Characteristic and we will discuss several
arxiv: v1 [math.gt] 6 Mar 2017
![arxiv: v1 [math.gt] 6 Mar 2017](/thumbs/81/82922476.jpg "arxiv: v1 [math.gt] 6 Mar 2017") CIRCLE PATTERNS, TOPOLOGICAL DEGREES AND DEFORMATION THEORY arxiv:1703.01768v1 [math.gt] 6 Mar 2017 ZE ZHOU ABSTRACT. By using topological degree theory, this paper extends Koebe-Andreev- Thurston theorem
CIRCLE PATTERNS, TOPOLOGICAL DEGREES AND DEFORMATION THEORY arxiv:1703.01768v1 [math.gt] 6 Mar 2017 ZE ZHOU ABSTRACT. By using topological degree theory, this paper extends Koebe-Andreev- Thurston theorem
Discrete Differential Geometry. Discrete Laplace-Beltrami operator and discrete conformal mappings.
 Discrete differential geometry. Discrete Laplace-Beltrami operator and discrete conformal mappings. Technische Universität Berlin Geometric Methods in Classical and Quantum Lattice Systems, Caputh, September
Discrete differential geometry. Discrete Laplace-Beltrami operator and discrete conformal mappings. Technische Universität Berlin Geometric Methods in Classical and Quantum Lattice Systems, Caputh, September
MATH DIFFERENTIAL GEOMETRY. Contents
 MATH 3968 - DIFFERENTIAL GEOMETRY ANDREW TULLOCH Contents 1. Curves in R N 2 2. General Analysis 2 3. Surfaces in R 3 3 3.1. The Gauss Bonnet Theorem 8 4. Abstract Manifolds 9 1 MATH 3968 - DIFFERENTIAL
MATH 3968 - DIFFERENTIAL GEOMETRY ANDREW TULLOCH Contents 1. Curves in R N 2 2. General Analysis 2 3. Surfaces in R 3 3 3.1. The Gauss Bonnet Theorem 8 4. Abstract Manifolds 9 1 MATH 3968 - DIFFERENTIAL
Part IB GEOMETRY (Lent 2016): Example Sheet 1
: Example Sheet 1") Part IB GEOMETRY (Lent 2016): Example Sheet 1 (a.g.kovalev@dpmms.cam.ac.uk) 1. Suppose that H is a hyperplane in Euclidean n-space R n defined by u x = c for some unit vector u and constant c. The reflection
Part IB GEOMETRY (Lent 2016): Example Sheet 1 (a.g.kovalev@dpmms.cam.ac.uk) 1. Suppose that H is a hyperplane in Euclidean n-space R n defined by u x = c for some unit vector u and constant c. The reflection
Hyperbolic Geometry on Geometric Surfaces
 Mathematics Seminar, 15 September 2010 Outline Introduction Hyperbolic geometry Abstract surfaces The hemisphere model as a geometric surface The Poincaré disk model as a geometric surface Conclusion Introduction
Mathematics Seminar, 15 September 2010 Outline Introduction Hyperbolic geometry Abstract surfaces The hemisphere model as a geometric surface The Poincaré disk model as a geometric surface Conclusion Introduction
Rigidity of polyhedral surfaces, II
 Rigidity of polyhedral surfaces, II REN GUO FENG LUO We study the rigidity of polyhedral surfaces using variational principle. The action functionals are derived from the cosine laws. The main focus of
Rigidity of polyhedral surfaces, II REN GUO FENG LUO We study the rigidity of polyhedral surfaces using variational principle. The action functionals are derived from the cosine laws. The main focus of
UNIVERSITY OF DUBLIN
 UNIVERSITY OF DUBLIN TRINITY COLLEGE JS & SS Mathematics SS Theoretical Physics SS TSM Mathematics Faculty of Engineering, Mathematics and Science school of mathematics Trinity Term 2015 Module MA3429
UNIVERSITY OF DUBLIN TRINITY COLLEGE JS & SS Mathematics SS Theoretical Physics SS TSM Mathematics Faculty of Engineering, Mathematics and Science school of mathematics Trinity Term 2015 Module MA3429
612 CLASS LECTURE: HYPERBOLIC GEOMETRY
 612 CLASS LECTURE: HYPERBOLIC GEOMETRY JOSHUA P. BOWMAN 1. Conformal metrics As a vector space, C has a canonical norm, the same as the standard R 2 norm. Denote this dz one should think of dz as the identity
612 CLASS LECTURE: HYPERBOLIC GEOMETRY JOSHUA P. BOWMAN 1. Conformal metrics As a vector space, C has a canonical norm, the same as the standard R 2 norm. Denote this dz one should think of dz as the identity
LOCAL RIGIDITY OF INVERSIVE DISTANCE CIRCLE PACKING
 LOCAL RIGIDITY OF INVERSIVE DISTANCE CIRCLE PACKING REN GUO Abstract. A Euclidean (or hyperbolic) circle packing on a triangulated closed surface with prescribed inversive distance is locally determined
LOCAL RIGIDITY OF INVERSIVE DISTANCE CIRCLE PACKING REN GUO Abstract. A Euclidean (or hyperbolic) circle packing on a triangulated closed surface with prescribed inversive distance is locally determined
How curvature shapes space
 How curvature shapes space Richard Schoen University of California, Irvine - Hopf Lecture, ETH, Zürich - October 30, 2017 The lecture will have three parts: Part 1: Heinz Hopf and Riemannian geometry Part
How curvature shapes space Richard Schoen University of California, Irvine - Hopf Lecture, ETH, Zürich - October 30, 2017 The lecture will have three parts: Part 1: Heinz Hopf and Riemannian geometry Part
Intrinsic Geometry. Andrejs Treibergs. Friday, March 7, 2008
 Early Research Directions: Geometric Analysis II Intrinsic Geometry Andrejs Treibergs University of Utah Friday, March 7, 2008 2. References Part of a series of thee lectures on geometric analysis. 1 Curvature
Early Research Directions: Geometric Analysis II Intrinsic Geometry Andrejs Treibergs University of Utah Friday, March 7, 2008 2. References Part of a series of thee lectures on geometric analysis. 1 Curvature
Part IB. Geometry. Year
 Part IB Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2004 2003 2002 2001 2017 17 Paper 1, Section I 3G Give the definition for the area of a hyperbolic triangle with interior angles
Part IB Year 2017 2016 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2004 2003 2002 2001 2017 17 Paper 1, Section I 3G Give the definition for the area of a hyperbolic triangle with interior angles
A PROOF OF THE GAUSS-BONNET THEOREM. Contents. 1. Introduction. 2. Regular Surfaces
 A PROOF OF THE GAUSS-BONNET THEOREM AARON HALPER Abstract. In this paper I will provide a proof of the Gauss-Bonnet Theorem. I will start by briefly explaining regular surfaces and move on to the first
A PROOF OF THE GAUSS-BONNET THEOREM AARON HALPER Abstract. In this paper I will provide a proof of the Gauss-Bonnet Theorem. I will start by briefly explaining regular surfaces and move on to the first
arxiv: v3 [math.gt] 29 May 2018
![arxiv: v3 [math.gt] 29 May 2018](/thumbs/86/93290726.jpg "arxiv: v3 [math.gt] 29 May 2018") arxiv:1611.08835v3 [math.gt] 29 May 2018 On the global rigidity of sphere packings on 3-dimensional manifolds Xu Xu Abstract In this paper, we prove the global rigidity of sphere packings on 3-dimensional
arxiv:1611.08835v3 [math.gt] 29 May 2018 On the global rigidity of sphere packings on 3-dimensional manifolds Xu Xu Abstract In this paper, we prove the global rigidity of sphere packings on 3-dimensional
William P. Thurston. The Geometry and Topology of Three-Manifolds
 William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 00 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
William P. Thurston The Geometry and Topology of Three-Manifolds Electronic version 1.1 - March 00 http://www.msri.org/publications/books/gt3m/ This is an electronic edition of the 1980 notes distributed
The Geometrization Theorem
 The Geometrization Theorem Matthew D. Brown Wednesday, December 19, 2012 In this paper, we discuss the Geometrization Theorem, formerly Thurston s Geometrization Conjecture, which is essentially the statement
The Geometrization Theorem Matthew D. Brown Wednesday, December 19, 2012 In this paper, we discuss the Geometrization Theorem, formerly Thurston s Geometrization Conjecture, which is essentially the statement
Möbius Transformation
 Möbius Transformation 1 1 June 15th, 2010 Mathematics Science Center Tsinghua University Philosophy Rigidity Conformal mappings have rigidity. The diffeomorphism group is of infinite dimension in general.
Möbius Transformation 1 1 June 15th, 2010 Mathematics Science Center Tsinghua University Philosophy Rigidity Conformal mappings have rigidity. The diffeomorphism group is of infinite dimension in general.
Estimates in surfaces with positive constant Gauss curvature
 Estimates in surfaces with positive constant Gauss curvature J. A. Gálvez A. Martínez Abstract We give optimal bounds of the height, curvature, area and enclosed volume of K-surfaces in R 3 bounding a
Estimates in surfaces with positive constant Gauss curvature J. A. Gálvez A. Martínez Abstract We give optimal bounds of the height, curvature, area and enclosed volume of K-surfaces in R 3 bounding a
DIFFERENTIAL GEOMETRY HW 5
 DIFFERENTIAL GEOMETRY HW 5 CLAY SHONKWILER 1 Check the calculations above that the Gaussian curvature of the upper half-plane and Poincaré disk models of the hyperbolic plane is 1. Proof. The calculations
DIFFERENTIAL GEOMETRY HW 5 CLAY SHONKWILER 1 Check the calculations above that the Gaussian curvature of the upper half-plane and Poincaré disk models of the hyperbolic plane is 1. Proof. The calculations
Mathematical Relativity, Spring 2017/18 Instituto Superior Técnico
 Mathematical Relativity, Spring 2017/18 Instituto Superior Técnico 1. Starting from R αβµν Z ν = 2 [α β] Z µ, deduce the components of the Riemann curvature tensor in terms of the Christoffel symbols.
Mathematical Relativity, Spring 2017/18 Instituto Superior Técnico 1. Starting from R αβµν Z ν = 2 [α β] Z µ, deduce the components of the Riemann curvature tensor in terms of the Christoffel symbols.
Introduction to Teichmüller Spaces
 Introduction to Teichmüller Spaces Jing Tao Notes by Serena Yuan 1. Riemann Surfaces Definition 1.1. A conformal structure is an atlas on a manifold such that the differentials of the transition maps lie
Introduction to Teichmüller Spaces Jing Tao Notes by Serena Yuan 1. Riemann Surfaces Definition 1.1. A conformal structure is an atlas on a manifold such that the differentials of the transition maps lie
Lecture 2: Isoperimetric methods for the curve-shortening flow and for the Ricci flow on surfaces
 Lecture 2: Isoperimetric methods for the curve-shortening flow and for the Ricci flow on surfaces Ben Andrews Mathematical Sciences Institute, Australian National University Winter School of Geometric
Lecture 2: Isoperimetric methods for the curve-shortening flow and for the Ricci flow on surfaces Ben Andrews Mathematical Sciences Institute, Australian National University Winter School of Geometric
Foliations of hyperbolic space by constant mean curvature surfaces sharing ideal boundary
 Foliations of hyperbolic space by constant mean curvature surfaces sharing ideal boundary David Chopp and John A. Velling December 1, 2003 Abstract Let γ be a Jordan curve in S 2, considered as the ideal
Foliations of hyperbolic space by constant mean curvature surfaces sharing ideal boundary David Chopp and John A. Velling December 1, 2003 Abstract Let γ be a Jordan curve in S 2, considered as the ideal
Final Exam Topic Outline
 Math 442 - Differential Geometry of Curves and Surfaces Final Exam Topic Outline 30th November 2010 David Dumas Note: There is no guarantee that this outline is exhaustive, though I have tried to include
Math 442 - Differential Geometry of Curves and Surfaces Final Exam Topic Outline 30th November 2010 David Dumas Note: There is no guarantee that this outline is exhaustive, though I have tried to include
Riemannian Curvature Functionals: Lecture I
 Riemannian Curvature Functionals: Lecture I Jeff Viaclovsky Park City athematics Institute July 16, 2013 Overview of lectures The goal of these lectures is to gain an understanding of critical points of
Riemannian Curvature Functionals: Lecture I Jeff Viaclovsky Park City athematics Institute July 16, 2013 Overview of lectures The goal of these lectures is to gain an understanding of critical points of
arxiv: v1 [math.dg] 1 Jul 2014
![arxiv: v1 [math.dg] 1 Jul 2014](/thumbs/92/108978689.jpg "arxiv: v1 [math.dg] 1 Jul 2014") Constrained matrix Li-Yau-Hamilton estimates on Kähler manifolds arxiv:1407.0099v1 [math.dg] 1 Jul 014 Xin-An Ren Sha Yao Li-Ju Shen Guang-Ying Zhang Department of Mathematics, China University of Mining
Constrained matrix Li-Yau-Hamilton estimates on Kähler manifolds arxiv:1407.0099v1 [math.dg] 1 Jul 014 Xin-An Ren Sha Yao Li-Ju Shen Guang-Ying Zhang Department of Mathematics, China University of Mining
TEICHMÜLLER SPACE MATTHEW WOOLF
 TEICHMÜLLER SPACE MATTHEW WOOLF Abstract. It is a well-known fact that every Riemann surface with negative Euler characteristic admits a hyperbolic metric. But this metric is by no means unique indeed,
TEICHMÜLLER SPACE MATTHEW WOOLF Abstract. It is a well-known fact that every Riemann surface with negative Euler characteristic admits a hyperbolic metric. But this metric is by no means unique indeed,
LECTURE 10: THE ATIYAH-GUILLEMIN-STERNBERG CONVEXITY THEOREM
 LECTURE 10: THE ATIYAH-GUILLEMIN-STERNBERG CONVEXITY THEOREM Contents 1. The Atiyah-Guillemin-Sternberg Convexity Theorem 1 2. Proof of the Atiyah-Guillemin-Sternberg Convexity theorem 3 3. Morse theory
LECTURE 10: THE ATIYAH-GUILLEMIN-STERNBERG CONVEXITY THEOREM Contents 1. The Atiyah-Guillemin-Sternberg Convexity Theorem 1 2. Proof of the Atiyah-Guillemin-Sternberg Convexity theorem 3 3. Morse theory
Groups up to quasi-isometry
 OSU November 29, 2007 1 Introduction 2 3 Topological methods in group theory via the fundamental group. group theory topology group Γ, a topological space X with π 1 (X) = Γ. Γ acts on the universal cover
OSU November 29, 2007 1 Introduction 2 3 Topological methods in group theory via the fundamental group. group theory topology group Γ, a topological space X with π 1 (X) = Γ. Γ acts on the universal cover
SYMPLECTIC GEOMETRY: LECTURE 5
 SYMPLECTIC GEOMETRY: LECTURE 5 LIAT KESSLER Let (M, ω) be a connected compact symplectic manifold, T a torus, T M M a Hamiltonian action of T on M, and Φ: M t the assoaciated moment map. Theorem 0.1 (The
SYMPLECTIC GEOMETRY: LECTURE 5 LIAT KESSLER Let (M, ω) be a connected compact symplectic manifold, T a torus, T M M a Hamiltonian action of T on M, and Φ: M t the assoaciated moment map. Theorem 0.1 (The
8.821 String Theory Fall 2008
 MIT OpenCourseWare http://ocw.mit.edu 8.81 String Theory Fall 008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 8.81 F008 Lecture 11: CFT continued;
MIT OpenCourseWare http://ocw.mit.edu 8.81 String Theory Fall 008 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 8.81 F008 Lecture 11: CFT continued;
Brunn Minkowski Theory in Minkowski space-times. François Fillastre Université de Cergy Pontoise France
 Brunn Minkowski Theory in Minkowski space-times François Fillastre Université de Cergy Pontoise France Convex bodies A convex body is a (non empty) compact convex set of R d+1 Convex bodies A convex body
Brunn Minkowski Theory in Minkowski space-times François Fillastre Université de Cergy Pontoise France Convex bodies A convex body is a (non empty) compact convex set of R d+1 Convex bodies A convex body
An Overview of Mathematical General Relativity
 An Overview of Mathematical General Relativity José Natário (Instituto Superior Técnico) Geometria em Lisboa, 8 March 2005 Outline Lorentzian manifolds Einstein s equation The Schwarzschild solution Initial
An Overview of Mathematical General Relativity José Natário (Instituto Superior Técnico) Geometria em Lisboa, 8 March 2005 Outline Lorentzian manifolds Einstein s equation The Schwarzschild solution Initial
A discrete uniformiza1on theorem for polyhedral surfaces
 A discrete uniformiza1on theorem for polyhedral surfaces Feng Luo Rutgers University Joint work with David Gu, Jian Sun, Tianqi Wu Knots and Low Dimensional Manifolds Busan, Korea, August 22-26, 2014 The
A discrete uniformiza1on theorem for polyhedral surfaces Feng Luo Rutgers University Joint work with David Gu, Jian Sun, Tianqi Wu Knots and Low Dimensional Manifolds Busan, Korea, August 22-26, 2014 The
M435: INTRODUCTION TO DIFFERENTIAL GEOMETRY
 M435: INTODUCTION TO DIFFNTIAL GOMTY MAK POWLL Contents 7. The Gauss-Bonnet Theorem 1 7.1. Statement of local Gauss-Bonnet theorem 1 7.2. Area of geodesic triangles 2 7.3. Special case of the plane 2 7.4.
M435: INTODUCTION TO DIFFNTIAL GOMTY MAK POWLL Contents 7. The Gauss-Bonnet Theorem 1 7.1. Statement of local Gauss-Bonnet theorem 1 7.2. Area of geodesic triangles 2 7.3. Special case of the plane 2 7.4.
Stratification of 3 3 Matrices
 Stratification of 3 3 Matrices Meesue Yoo & Clay Shonkwiler March 2, 2006 1 Warmup with 2 2 Matrices { Best matrices of rank 2} = O(2) S 3 ( 2) { Best matrices of rank 1} S 3 (1) 1.1 Viewing O(2) S 3 (
Stratification of 3 3 Matrices Meesue Yoo & Clay Shonkwiler March 2, 2006 1 Warmup with 2 2 Matrices { Best matrices of rank 2} = O(2) S 3 ( 2) { Best matrices of rank 1} S 3 (1) 1.1 Viewing O(2) S 3 (
Gauss Theorem Egregium, Gauss-Bonnet etc. We know that for a simple closed curve in the plane. kds = 2π.
 Gauss Theorem Egregium, Gauss-Bonnet etc. We know that for a simple closed curve in the plane kds = 2π. Now we want to consider a simple closed curve C in a surface S R 3. We suppose C is the boundary
Gauss Theorem Egregium, Gauss-Bonnet etc. We know that for a simple closed curve in the plane kds = 2π. Now we want to consider a simple closed curve C in a surface S R 3. We suppose C is the boundary
DIFFERENTIAL GEOMETRY. LECTURE 12-13,
 DIFFERENTIAL GEOMETRY. LECTURE 12-13, 3.07.08 5. Riemannian metrics. Examples. Connections 5.1. Length of a curve. Let γ : [a, b] R n be a parametried curve. Its length can be calculated as the limit of
DIFFERENTIAL GEOMETRY. LECTURE 12-13, 3.07.08 5. Riemannian metrics. Examples. Connections 5.1. Length of a curve. Let γ : [a, b] R n be a parametried curve. Its length can be calculated as the limit of
Index. Bertrand mate, 89 bijection, 48 bitangent, 69 Bolyai, 339 Bonnet s Formula, 283 bounded, 48
 Index acceleration, 14, 76, 355 centripetal, 27 tangential, 27 algebraic geometry, vii analytic, 44 angle at a corner, 21 on a regular surface, 170 angle excess, 337 angle of parallelism, 344 angular velocity,
Index acceleration, 14, 76, 355 centripetal, 27 tangential, 27 algebraic geometry, vii analytic, 44 angle at a corner, 21 on a regular surface, 170 angle excess, 337 angle of parallelism, 344 angular velocity,
Quasi-local mass and isometric embedding
 Quasi-local mass and isometric embedding Mu-Tao Wang, Columbia University September 23, 2015, IHP Recent Advances in Mathematical General Relativity Joint work with Po-Ning Chen and Shing-Tung Yau. The
Quasi-local mass and isometric embedding Mu-Tao Wang, Columbia University September 23, 2015, IHP Recent Advances in Mathematical General Relativity Joint work with Po-Ning Chen and Shing-Tung Yau. The
DIFFERENTIAL GEOMETRY HW 5. Show that the law of cosines in spherical geometry is. cos c = cos a cos b + sin a sin b cos θ.
 DIFFEENTIAL GEOMETY HW 5 CLAY SHONKWILE Show that the law of cosines in spherical geometry is 5 cos c cos a cos b + sin a sin b cos θ. Proof. Consider the spherical triangle depicted below: Form radii
DIFFEENTIAL GEOMETY HW 5 CLAY SHONKWILE Show that the law of cosines in spherical geometry is 5 cos c cos a cos b + sin a sin b cos θ. Proof. Consider the spherical triangle depicted below: Form radii
The Theorem of Gauß-Bonnet in Complex Analysis 1
 The Theorem of Gauß-Bonnet in Complex Analysis 1 Otto Forster Abstract. The theorem of Gauß-Bonnet is interpreted within the framework of Complex Analysis of one and several variables. Geodesic triangles
The Theorem of Gauß-Bonnet in Complex Analysis 1 Otto Forster Abstract. The theorem of Gauß-Bonnet is interpreted within the framework of Complex Analysis of one and several variables. Geodesic triangles
QUATERNIONS AND ROTATIONS
 QUATERNIONS AND ROTATIONS SVANTE JANSON 1. Introduction The purpose of this note is to show some well-known relations between quaternions and the Lie groups SO(3) and SO(4) (rotations in R 3 and R 4 )
QUATERNIONS AND ROTATIONS SVANTE JANSON 1. Introduction The purpose of this note is to show some well-known relations between quaternions and the Lie groups SO(3) and SO(4) (rotations in R 3 and R 4 )
INTRODUCTION TO GEOMETRY
 INTRODUCTION TO GEOMETRY ERIKA DUNN-WEISS Abstract. This paper is an introduction to Riemannian and semi-riemannian manifolds of constant sectional curvature. We will introduce the concepts of moving frames,
INTRODUCTION TO GEOMETRY ERIKA DUNN-WEISS Abstract. This paper is an introduction to Riemannian and semi-riemannian manifolds of constant sectional curvature. We will introduce the concepts of moving frames,
Tutorial on Optimal Mass Transprot for Computer Vision
 Tutorial on Optimal Mass Transprot for Computer Vision David Gu State University of New York at Stony Brook Graduate Summer School: Computer Vision, IPAM, UCLA July 31, 2013 Joint work with Shing-Tung
Tutorial on Optimal Mass Transprot for Computer Vision David Gu State University of New York at Stony Brook Graduate Summer School: Computer Vision, IPAM, UCLA July 31, 2013 Joint work with Shing-Tung
A FEW APPLICATIONS OF DIFFERENTIAL FORMS. Contents
 A FEW APPLICATIONS OF DIFFERENTIAL FORMS MATTHEW CORREIA Abstract. This paper introduces the concept of differential forms by defining the tangent space of R n at point p with equivalence classes of curves
A FEW APPLICATIONS OF DIFFERENTIAL FORMS MATTHEW CORREIA Abstract. This paper introduces the concept of differential forms by defining the tangent space of R n at point p with equivalence classes of curves
LOCAL RIGIDITY OF INVERSIVE DISTANCE CIRCLE PACKING
 TRANSACTIONS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 363, Number 9, September, Pages 4757 4776 S -9947()539-6 Article electronically published on April, LOCAL RIGIDITY OF INVERSIVE DISTANCE CIRCLE
TRANSACTIONS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 363, Number 9, September, Pages 4757 4776 S -9947()539-6 Article electronically published on April, LOCAL RIGIDITY OF INVERSIVE DISTANCE CIRCLE
δ-hyperbolic SPACES SIDDHARTHA GADGIL
 δ-hyperbolic SPACES SIDDHARTHA GADGIL Abstract. These are notes for the Chennai TMGT conference on δ-hyperbolic spaces corresponding to chapter III.H in the book of Bridson and Haefliger. When viewed from
δ-hyperbolic SPACES SIDDHARTHA GADGIL Abstract. These are notes for the Chennai TMGT conference on δ-hyperbolic spaces corresponding to chapter III.H in the book of Bridson and Haefliger. When viewed from
HILBERT S THEOREM ON THE HYPERBOLIC PLANE
 HILBET S THEOEM ON THE HYPEBOLIC PLANE MATTHEW D. BOWN Abstract. We recount a proof of Hilbert s result that a complete geometric surface of constant negative Gaussian curvature cannot be isometrically
HILBET S THEOEM ON THE HYPEBOLIC PLANE MATTHEW D. BOWN Abstract. We recount a proof of Hilbert s result that a complete geometric surface of constant negative Gaussian curvature cannot be isometrically
The collision probability method in 1D part 2
 The collision probability method in 1D part 2 Alain Hébert alain.hebert@polymtl.ca Institut de génie nucléaire École Polytechnique de Montréal ENE611: Week 9 The collision probability method in 1D part
The collision probability method in 1D part 2 Alain Hébert alain.hebert@polymtl.ca Institut de génie nucléaire École Polytechnique de Montréal ENE611: Week 9 The collision probability method in 1D part
Lecture 20. The Gauss-Bonnet Theorem
 Lecture 0. The Gauss-Bonnet Theorem In this lecture we will prove two important global theorems about the geometr and topolog of two-dimensional manifolds. These are the Gauss-Bonnet theorem and the Poincaré-Hopf
Lecture 0. The Gauss-Bonnet Theorem In this lecture we will prove two important global theorems about the geometr and topolog of two-dimensional manifolds. These are the Gauss-Bonnet theorem and the Poincaré-Hopf
Section 2. Basic formulas and identities in Riemannian geometry
 Section 2. Basic formulas and identities in Riemannian geometry Weimin Sheng and 1. Bianchi identities The first and second Bianchi identities are R ijkl + R iklj + R iljk = 0 R ijkl,m + R ijlm,k + R ijmk,l
Section 2. Basic formulas and identities in Riemannian geometry Weimin Sheng and 1. Bianchi identities The first and second Bianchi identities are R ijkl + R iklj + R iljk = 0 R ijkl,m + R ijlm,k + R ijmk,l
ν(u, v) = N(u, v) G(r(u, v)) E r(u,v) 3.
 = N(u, v) G(r(u, v)) E r(u,v) 3.") 5. The Gauss Curvature Beyond doubt, the notion of Gauss curvature is of paramount importance in differential geometry. Recall two lessons we have learned so far about this notion: first, the presence
5. The Gauss Curvature Beyond doubt, the notion of Gauss curvature is of paramount importance in differential geometry. Recall two lessons we have learned so far about this notion: first, the presence
Volume preserving surgeries on hyperbolic 3-manifolds
 Volume preserving surgeries on hyperbolic 3-manifolds Peter Rudzis Advisor: Dr. Rolland Trapp August 19, 2016 Abstract In this paper, we investigate two types of surgeries, the parallel surgery and the
Volume preserving surgeries on hyperbolic 3-manifolds Peter Rudzis Advisor: Dr. Rolland Trapp August 19, 2016 Abstract In this paper, we investigate two types of surgeries, the parallel surgery and the
CHARACTERIZATIONS OF CIRCLE PATTERNS AND CONVEX POLYHEDRA IN HYPERBOLIC 3-SPACE
 CHARACTERIZATIONS OF CIRCLE PATTERNS AND CONVEX POLYHEDRA IN HYPERBOLIC 3-SPACE XIAOJUN HUANG AND JINSONG LIU ABSTRACT In this paper we consider the characterization problem of convex polyhedrons in the
CHARACTERIZATIONS OF CIRCLE PATTERNS AND CONVEX POLYHEDRA IN HYPERBOLIC 3-SPACE XIAOJUN HUANG AND JINSONG LIU ABSTRACT In this paper we consider the characterization problem of convex polyhedrons in the
The Gauss Bonnet Theorem
 Chapter 27 The Gauss Bonnet Theorem That the sum of the interior angles of a triangle in the plane equals π radians was one of the first mathematical facts established by the Greeks. In 1603 Harriot 1
Chapter 27 The Gauss Bonnet Theorem That the sum of the interior angles of a triangle in the plane equals π radians was one of the first mathematical facts established by the Greeks. In 1603 Harriot 1
Differential Geometry II Lecture 1: Introduction and Motivation
 Differential Geometry II Lecture 1: Introduction and Motivation Robert Haslhofer 1 Content of this lecture This course is on Riemannian geometry and the geometry of submanifol. The goal of this first lecture
Differential Geometry II Lecture 1: Introduction and Motivation Robert Haslhofer 1 Content of this lecture This course is on Riemannian geometry and the geometry of submanifol. The goal of this first lecture
On complexified quantum mechanics and space-time
 On complexified quantum mechanics and space-time Dorje C. Brody Mathematical Sciences Brunel University, Uxbridge UB8 3PH dorje.brody@brunel.ac.uk Quantum Physics with Non-Hermitian Operators Dresden:
On complexified quantum mechanics and space-time Dorje C. Brody Mathematical Sciences Brunel University, Uxbridge UB8 3PH dorje.brody@brunel.ac.uk Quantum Physics with Non-Hermitian Operators Dresden:
Minimal submanifolds: old and new
 Minimal submanifolds: old and new Richard Schoen Stanford University - Chen-Jung Hsu Lecture 1, Academia Sinica, ROC - December 2, 2013 Plan of Lecture Part 1: Volume, mean curvature, and minimal submanifolds
Minimal submanifolds: old and new Richard Schoen Stanford University - Chen-Jung Hsu Lecture 1, Academia Sinica, ROC - December 2, 2013 Plan of Lecture Part 1: Volume, mean curvature, and minimal submanifolds
Gromov hyperbolicity of Denjoy domains
 Universidad Carlos III de Madrid Repositorio institucional e-archivo Grupo de Análisis Matemático Aplicado (GAMA) http://e-archivo.uc3m.es DM - GAMA - Artículos de Revistas 2006-08 Gromov hyperbolicity
Universidad Carlos III de Madrid Repositorio institucional e-archivo Grupo de Análisis Matemático Aplicado (GAMA) http://e-archivo.uc3m.es DM - GAMA - Artículos de Revistas 2006-08 Gromov hyperbolicity
Rigidity and Non-rigidity Results on the Sphere
 Rigidity and Non-rigidity Results on the Sphere Fengbo Hang Xiaodong Wang Department of Mathematics Michigan State University Oct., 00 1 Introduction It is a simple consequence of the maximum principle
Rigidity and Non-rigidity Results on the Sphere Fengbo Hang Xiaodong Wang Department of Mathematics Michigan State University Oct., 00 1 Introduction It is a simple consequence of the maximum principle
MINIMIZING PROPERTIES OF CRITICAL POINTS OF QUASI-LOCAL ENERGY
 MINIMIZING PROPERTIES OF CRITICAL POINTS OF QUASI-LOCAL ENERGY PO-NING CHEN, MU-TAO WANG, AND SHING-TUNG YAU arxiv:30.53v [math.dg] 5 Jun 03 Abstract. In relativity, the energy of a moving particle depends
MINIMIZING PROPERTIES OF CRITICAL POINTS OF QUASI-LOCAL ENERGY PO-NING CHEN, MU-TAO WANG, AND SHING-TUNG YAU arxiv:30.53v [math.dg] 5 Jun 03 Abstract. In relativity, the energy of a moving particle depends
Introduction. Hamilton s Ricci flow and its early success
 Introduction In this book we compare the linear heat equation on a static manifold with the Ricci flow which is a nonlinear heat equation for a Riemannian metric g(t) on M and with the heat equation on
Introduction In this book we compare the linear heat equation on a static manifold with the Ricci flow which is a nonlinear heat equation for a Riemannian metric g(t) on M and with the heat equation on
DEVELOPMENT OF MORSE THEORY
 DEVELOPMENT OF MORSE THEORY MATTHEW STEED Abstract. In this paper, we develop Morse theory, which allows us to determine topological information about manifolds using certain real-valued functions defined
DEVELOPMENT OF MORSE THEORY MATTHEW STEED Abstract. In this paper, we develop Morse theory, which allows us to determine topological information about manifolds using certain real-valued functions defined
USAC Colloquium. Bending Polyhedra. Andrejs Treibergs. September 4, Figure 1: A Rigid Polyhedron. University of Utah
 USAC Colloquium Bending Polyhedra Andrejs Treibergs University of Utah September 4, 2013 Figure 1: A Rigid Polyhedron. 2. USAC Lecture: Bending Polyhedra The URL for these Beamer Slides: BendingPolyhedra
USAC Colloquium Bending Polyhedra Andrejs Treibergs University of Utah September 4, 2013 Figure 1: A Rigid Polyhedron. 2. USAC Lecture: Bending Polyhedra The URL for these Beamer Slides: BendingPolyhedra
Perelman s proof of the Poincaré conjecture
 University of California, Los Angeles Clay/Mahler Lecture Series In a series of three papers in 2002-2003, Grisha Perelman solved the famous Poincaré conjecture: Poincaré conjecture (1904) Every smooth,
University of California, Los Angeles Clay/Mahler Lecture Series In a series of three papers in 2002-2003, Grisha Perelman solved the famous Poincaré conjecture: Poincaré conjecture (1904) Every smooth,
SOME SPECIAL KLEINIAN GROUPS AND THEIR ORBIFOLDS
 Proyecciones Vol. 21, N o 1, pp. 21-50, May 2002. Universidad Católica del Norte Antofagasta - Chile SOME SPECIAL KLEINIAN GROUPS AND THEIR ORBIFOLDS RUBÉN HIDALGO Universidad Técnica Federico Santa María
Proyecciones Vol. 21, N o 1, pp. 21-50, May 2002. Universidad Católica del Norte Antofagasta - Chile SOME SPECIAL KLEINIAN GROUPS AND THEIR ORBIFOLDS RUBÉN HIDALGO Universidad Técnica Federico Santa María
THE DOUBLE COVER RELATIVE TO A CONVEX DOMAIN AND THE RELATIVE ISOPERIMETRIC INEQUALITY
 J. Aust. Math. Soc. 80 (2006), 375 382 THE DOUBLE COVER RELATIVE TO A CONVEX DOMAIN AND THE RELATIVE ISOPERIMETRIC INEQUALITY JAIGYOUNG CHOE (Received 18 March 2004; revised 16 February 2005) Communicated
J. Aust. Math. Soc. 80 (2006), 375 382 THE DOUBLE COVER RELATIVE TO A CONVEX DOMAIN AND THE RELATIVE ISOPERIMETRIC INEQUALITY JAIGYOUNG CHOE (Received 18 March 2004; revised 16 February 2005) Communicated
PICARD S THEOREM STEFAN FRIEDL
 PICARD S THEOREM STEFAN FRIEDL Abstract. We give a summary for the proof of Picard s Theorem. The proof is for the most part an excerpt of [F]. 1. Introduction Definition. Let U C be an open subset. A
PICARD S THEOREM STEFAN FRIEDL Abstract. We give a summary for the proof of Picard s Theorem. The proof is for the most part an excerpt of [F]. 1. Introduction Definition. Let U C be an open subset. A
Tensor Analysis in Euclidean Space
 Tensor Analysis in Euclidean Space James Emery Edited: 8/5/2016 Contents 1 Classical Tensor Notation 2 2 Multilinear Functionals 4 3 Operations With Tensors 5 4 The Directional Derivative 5 5 Curvilinear
Tensor Analysis in Euclidean Space James Emery Edited: 8/5/2016 Contents 1 Classical Tensor Notation 2 2 Multilinear Functionals 4 3 Operations With Tensors 5 4 The Directional Derivative 5 5 Curvilinear
NOTES FOR MATH 5520, SPRING Outline
 NOTES FOR MATH 5520, SPRING 2011 DOMINGO TOLEDO 1. Outline This will be a course on the topology and geometry of surfaces. This is a continuation of Math 4510, and we will often refer to the notes for
NOTES FOR MATH 5520, SPRING 2011 DOMINGO TOLEDO 1. Outline This will be a course on the topology and geometry of surfaces. This is a continuation of Math 4510, and we will often refer to the notes for
June 21, Peking University. Dual Connections. Zhengchao Wan. Overview. Duality of connections. Divergence: general contrast functions
 Dual Peking University June 21, 2016 Divergences: Riemannian connection Let M be a manifold on which there is given a Riemannian metric g =,. A connection satisfying Z X, Y = Z X, Y + X, Z Y (1) for all
Dual Peking University June 21, 2016 Divergences: Riemannian connection Let M be a manifold on which there is given a Riemannian metric g =,. A connection satisfying Z X, Y = Z X, Y + X, Z Y (1) for all
The 3-Dimensional Geometrisation Conjecture Of W. P. Thurston
 The 3-Dimensional Geometrisation Conjecture Of W. P. Thurston May 14, 2002 Contents 1 Introduction 2 2 G-manifolds 3 2.1 Definitions and basic examples................... 3 2.2 Foliations...............................
The 3-Dimensional Geometrisation Conjecture Of W. P. Thurston May 14, 2002 Contents 1 Introduction 2 2 G-manifolds 3 2.1 Definitions and basic examples................... 3 2.2 Foliations...............................
A crash course the geometry of hyperbolic surfaces
 Lecture 7 A crash course the geometry of hyperbolic surfaces 7.1 The hyperbolic plane Hyperbolic geometry originally developed in the early 19 th century to prove that the parallel postulate in Euclidean
Lecture 7 A crash course the geometry of hyperbolic surfaces 7.1 The hyperbolic plane Hyperbolic geometry originally developed in the early 19 th century to prove that the parallel postulate in Euclidean
HYPERBOLIC GEOMETRY AND PARALLEL TRANSPORT IN R 2 +
 HYPERBOLIC GEOMETRY ND PRLLEL TRNSPORT IN R + VINCENT GLORIOSO, BRITTNY LNDRY, ND PHILLIP WHITE bstract. We will examine the parallel transport of tangent vectors along a hyperbolic triangle containing
HYPERBOLIC GEOMETRY ND PRLLEL TRNSPORT IN R + VINCENT GLORIOSO, BRITTNY LNDRY, ND PHILLIP WHITE bstract. We will examine the parallel transport of tangent vectors along a hyperbolic triangle containing
An introduction to orbifolds
 An introduction to orbifolds Joan Porti UAB Subdivide and Tile: Triangulating spaces for understanding the world Lorentz Center November 009 An introduction to orbifolds p.1/0 Motivation Γ < Isom(R n )
An introduction to orbifolds Joan Porti UAB Subdivide and Tile: Triangulating spaces for understanding the world Lorentz Center November 009 An introduction to orbifolds p.1/0 Motivation Γ < Isom(R n )
The 77th Compton lecture series Frustrating geometry: Geometry and incompatibility shaping the physical world
 The 77th Compton lecture series Frustrating geometry: Geometry and incompatibility shaping the physical world Lecture 6: Space-time geometry General relativity and some topology Efi Efrati Simons postdoctoral
The 77th Compton lecture series Frustrating geometry: Geometry and incompatibility shaping the physical world Lecture 6: Space-time geometry General relativity and some topology Efi Efrati Simons postdoctoral
GEOMETRY HW 7 CLAY SHONKWILER
 GEOMETRY HW 7 CLAY SHONKWILER 4.5.1 Let S R 3 be a regular, compact, orientable surface which is not homeomorphic to a sphere. Prove that there are points on S where the Gaussian curvature is positive,
GEOMETRY HW 7 CLAY SHONKWILER 4.5.1 Let S R 3 be a regular, compact, orientable surface which is not homeomorphic to a sphere. Prove that there are points on S where the Gaussian curvature is positive,
Geometry of the Moduli Space of Curves and Algebraic Manifolds
 Geometry of the Moduli Space of Curves and Algebraic Manifolds Shing-Tung Yau Harvard University 60th Anniversary of the Institute of Mathematics Polish Academy of Sciences April 4, 2009 The first part
Geometry of the Moduli Space of Curves and Algebraic Manifolds Shing-Tung Yau Harvard University 60th Anniversary of the Institute of Mathematics Polish Academy of Sciences April 4, 2009 The first part
Numerical Approximation of Phase Field Models
 Numerical Approximation of Phase Field Models Lecture 2: Allen Cahn and Cahn Hilliard Equations with Smooth Potentials Robert Nürnberg Department of Mathematics Imperial College London TUM Summer School
Numerical Approximation of Phase Field Models Lecture 2: Allen Cahn and Cahn Hilliard Equations with Smooth Potentials Robert Nürnberg Department of Mathematics Imperial College London TUM Summer School
An introduction to General Relativity and the positive mass theorem
 An introduction to General Relativity and the positive mass theorem National Center for Theoretical Sciences, Mathematics Division March 2 nd, 2007 Wen-ling Huang Department of Mathematics University of
An introduction to General Relativity and the positive mass theorem National Center for Theoretical Sciences, Mathematics Division March 2 nd, 2007 Wen-ling Huang Department of Mathematics University of
Chapter 5. The Second Fundamental Form
 Chapter 5. The Second Fundamental Form Directional Derivatives in IR 3. Let f : U IR 3 IR be a smooth function defined on an open subset of IR 3. Fix p U and X T p IR 3. The directional derivative of f
Chapter 5. The Second Fundamental Form Directional Derivatives in IR 3. Let f : U IR 3 IR be a smooth function defined on an open subset of IR 3. Fix p U and X T p IR 3. The directional derivative of f
EE Technion, Spring then. can be isometrically embedded into can be realized as a Gram matrix of rank, Properties:
 5/25/200 2 A mathematical exercise Assume points with the metric are isometrically embeddable into Then, there exists a canonical form such that for all Spectral methods We can also write Alexander & Michael
5/25/200 2 A mathematical exercise Assume points with the metric are isometrically embeddable into Then, there exists a canonical form such that for all Spectral methods We can also write Alexander & Michael
LECTURE 22: THE CRITICAL POINT THEORY OF DISTANCE FUNCTIONS
 LECTURE : THE CRITICAL POINT THEORY OF DISTANCE FUNCTIONS 1. Critical Point Theory of Distance Functions Morse theory is a basic tool in differential topology which also has many applications in Riemannian
LECTURE : THE CRITICAL POINT THEORY OF DISTANCE FUNCTIONS 1. Critical Point Theory of Distance Functions Morse theory is a basic tool in differential topology which also has many applications in Riemannian
Notation : M a closed (= compact boundaryless) orientable 3-dimensional manifold
 orientable 3-dimensional manifold") Overview John Lott Notation : M a closed (= compact boundaryless) orientable 3-dimensional manifold Conjecture. (Poincaré, 1904) If M is simply connected then it is diffeomorphic to the three-sphere S
Overview John Lott Notation : M a closed (= compact boundaryless) orientable 3-dimensional manifold Conjecture. (Poincaré, 1904) If M is simply connected then it is diffeomorphic to the three-sphere S
Riemann surfaces. Ian Short. Thursday 29 November 2012
 Riemann surfaces Ian Short Thursday 29 November 2012 Complex analysis and geometry in the plane Complex differentiability Complex differentiability Complex differentiability Complex differentiability Complex
Riemann surfaces Ian Short Thursday 29 November 2012 Complex analysis and geometry in the plane Complex differentiability Complex differentiability Complex differentiability Complex differentiability Complex
TRIGONOMETRY IN EXTENDED HYPERBOLIC SPACE AND EXTENDED DE SITTER SPACE
 Bull. Korean Math. Soc. 46 (009), No. 6, pp. 1099 1133 DOI 10.4134/BKMS.009.46.6.1099 TRIGONOMETRY IN EXTENDED HYPERBOLIC SPACE AND EXTENDED DE SITTER SPACE Yunhi Cho Abstract. We study the hyperbolic
Bull. Korean Math. Soc. 46 (009), No. 6, pp. 1099 1133 DOI 10.4134/BKMS.009.46.6.1099 TRIGONOMETRY IN EXTENDED HYPERBOLIC SPACE AND EXTENDED DE SITTER SPACE Yunhi Cho Abstract. We study the hyperbolic
LECTURE 21: THE HESSIAN, LAPLACE AND TOPOROGOV COMPARISON THEOREMS. 1. The Hessian Comparison Theorem. We recall from last lecture that
 LECTURE 21: THE HESSIAN, LAPLACE AND TOPOROGOV COMPARISON THEOREMS We recall from last lecture that 1. The Hessian Comparison Theorem K t) = min{kπ γt) ) γt) Π γt) }, K + t) = max{k Π γt) ) γt) Π γt) }.
LECTURE 21: THE HESSIAN, LAPLACE AND TOPOROGOV COMPARISON THEOREMS We recall from last lecture that 1. The Hessian Comparison Theorem K t) = min{kπ γt) ) γt) Π γt) }, K + t) = max{k Π γt) ) γt) Π γt) }.
arxiv: v2 [math.dg] 12 Mar 2018
![arxiv: v2 [math.dg] 12 Mar 2018](/thumbs/94/121807573.jpg "arxiv: v2 [math.dg] 12 Mar 2018") On triangle meshes with valence 6 dominant vertices Jean-Marie Morvan ariv:1802.05851v2 [math.dg] 12 Mar 2018 Abstract We study triangulations T defined on a closed disc satisfying the following condition
On triangle meshes with valence 6 dominant vertices Jean-Marie Morvan ariv:1802.05851v2 [math.dg] 12 Mar 2018 Abstract We study triangulations T defined on a closed disc satisfying the following condition
Introduction to Differential Geometry
 More about Introduction to Differential Geometry Lecture 7 of 10: Dominic Joyce, Oxford University October 2018 EPSRC CDT in Partial Differential Equations foundation module. These slides available at
More about Introduction to Differential Geometry Lecture 7 of 10: Dominic Joyce, Oxford University October 2018 EPSRC CDT in Partial Differential Equations foundation module. These slides available at
The result above is known as the Riemann mapping theorem. We will prove it using basic theory of normal families. We start this lecture with that.
 Lecture 15 The Riemann mapping theorem Variables MATH-GA 2451.1 Complex The point of this lecture is to prove that the unit disk can be mapped conformally onto any simply connected open set in the plane,
Lecture 15 The Riemann mapping theorem Variables MATH-GA 2451.1 Complex The point of this lecture is to prove that the unit disk can be mapped conformally onto any simply connected open set in the plane,
Convex Projective Structures on Non-hyperbolic 3-manifolds
 Convex Projective Structures on Non-hyperbolic 3-manifolds Sam Ballas (joint with J. Danciger and G.-S. Lee) Higher Teichmüller theory and Higgs bundles Heidelberg November 3, 2015 Overview If you want
Convex Projective Structures on Non-hyperbolic 3-manifolds Sam Ballas (joint with J. Danciger and G.-S. Lee) Higher Teichmüller theory and Higgs bundles Heidelberg November 3, 2015 Overview If you want
Junior Seminar: Hyperbolic Geometry Lecture Notes
 Junior Seminar: Hyperbolic Geometry Lecture Notes Tim Campion January 20, 2010 1 Motivation Our first construction is very similar in spirit to an analogous one in Euclidean space. The group of isometries
Junior Seminar: Hyperbolic Geometry Lecture Notes Tim Campion January 20, 2010 1 Motivation Our first construction is very similar in spirit to an analogous one in Euclidean space. The group of isometries
Surface Registration by Optimization in Constrained Diffeomorphism Space
 Surface Registration by Optimization in Constrained Diffeomorphism Space Wei Zeng Florida International University, Florida wzeng@cs.fiu.edu Lok Ming Lui Chinese University of Hong Kong, Hong Kong Xianfeng
Surface Registration by Optimization in Constrained Diffeomorphism Space Wei Zeng Florida International University, Florida wzeng@cs.fiu.edu Lok Ming Lui Chinese University of Hong Kong, Hong Kong Xianfeng
Theorem. In terms of the coordinate frame, the Levi-Civita connection is given by:
 THE LEVI-CIVITA CONNECTION FOR THE POINCARÉ METRIC We denote complex numbers z = x + yi C where x, y R. Let H 2 denote the upper half-plane with the Poincaré metric: {x + iy x, y R, y > 0} g = dz 2 y 2
THE LEVI-CIVITA CONNECTION FOR THE POINCARÉ METRIC We denote complex numbers z = x + yi C where x, y R. Let H 2 denote the upper half-plane with the Poincaré metric: {x + iy x, y R, y > 0} g = dz 2 y 2