A short introduction with a view toward examples. Short presentation for the students of: Dynamical Systems and Complexity Summer School Volos, 2017
|
|
|
- Jared Lionel Fox
- 6 years ago
- Views:
Transcription
1 A short introduction with a view toward examples Center of Research and Applications of Nonlinear (CRANS) Department of Mathematics University of Patras Greece sanastassiou@gmail.com Short presentation for the students of: Dynamical and Complexity Summer School Volos, 2017
2 Outline

")
")

3 The giants Jacques S Hadamard ( ) Henri Poincare ( ) Dmitri V Anosov ( ) Stephen Smale ( )
4 of A rather incomplete list Global Stability Hartman Grobman Theorem, Stable Manifold Theorem, Closing Lemma, Shadowing, Genericity, Ω Stability Theorem, Structural Stability Theorem Geometry and Dynamics hyperbolic actions, hyperbolic geometry, geodesic flow, Anosov diffeomorphisms and flows, billiards, recurrence Construction of guiding examples conditions for hyperbolicity, Shilnikov s theorem, calculation of invariant sets, verification of hyperbolicity in concrete examples, asymptotic behavior of the system Ergodic Theory equidistribution and recurrences, SRB-measures, zeta functions, topological entropy
5 Definition Let A M(n n, R). We shall call A hyperbolic if no eigenvalue of A has norm equal to 1. The linear map corresponding to A, that is, T : R n R n, T (x) = Ax is also called hyperbolic. Example [ ] 2 1 A = 1 1 with eigenvalues λ 1 = > 1, λ 2 = λ 1 1 < 1 and eigenvectors e 1 = ( , 1) and e 2 = ( 1 5 2, 1). e 1, e 2 form a basis of R 2 or R 2 = e 1 e 2 For T : R 2 R 2, T (x, y) = (2x + y, x + y) we have that T e1 is a dilation and T e2 a contraction.
6 Definition Let f : R n R n, of class C r, r 1, and Λ a smooth subset of R n, invariant under f (i.e. f (Λ) = Λ). We say that Λ is hyperbolic for f if: T x R n = E s (x) E u (x), x Λ. d x f (E s (x)) E s (f (x)) and d x f (E u (x)) E u (f (x)) d x f n E s (x), d x f n E u (x) Cτ n, C > 0, 0 < τ < 1, n N. Example For f : R 2 R 2, f (x, y) = (2x + y 2, x y), the origin is a (trivial) hyperbolic set. We can study the behavior of f in a neighborhood of it using the Hartman-Grobman theorem.
7 The 2 dimensional torus Or, how to construct a pretzel If (x 1, y 1 ), (x 2, y 2 ) R 2, define (x 1, y 1 ) (x 2, y 2 ) iff x 1 x 2 Z and y 1 y 2 Z. The set of all points of R 2 equivallent to (x, y) will be denoted as [(x, y)]. The set of all equivallence classes will be denoted as R 2 /Z 2. R 2 /Z 2 T 2.
8 automorphim We return to T : R 2 R 2, T (x, y) = (2x + y, x + y). It s easy to show that if (x 1, y 1 ) (x 2, y 2 ) then T (x 1, y 1 ) T (x 2, y 2 ). We have thus defined a mapping L : T 2 T 2. Theorem T 2 is a hyperbolic set for L. Periodic orbits of L are dense in T 2, L has a dence orbit which is not periodic and P n (F L ) = λ n 1 + λ n 1 2. Proof. Points with rational coordinates, and only these, are periodic orbits of L. Actually one can find a special relation between L and the Bernoulli shift. Note that arbitrarily close points may have quite different future! One can easily generalize the example above in any dimension.
9 Simple chaos Let us here recall the definition of chaos. Definition Let f : M M and N M a compact subset, invariant under f. We say that f presents chaotic behavior in N if: The set of periodic orbits of f is dense in N. N contains a dense, non periodic, orbit of f. Since T 2 is compact, we conclude that: Theorem Mapping L : T 2 T 2 defined above is chaotic. Proof. Actually, this is a corollary of the previous theorem.
10 Things to remember Hyperbolic theory provides us with simple examples of chaotic behavior, which are amenable to analytical study. Anything else?
11 Stability When do two dynamical systems have the same behavior? Definition Let f, g : X X be two continuous mappings of the topological space X. We shall call them topologically conjugate if a homeomorphism h : X X exists, such that g h = h f. X f X h h X g X
12 Theorem Every C 1 diffeomorphism g : T 2 T 2 which is sufficiently close to L : T 2 T 2, in the C 1 topology, is topologically conjugate to L. Proof. We have to solve equation g h = h L, with respect to h Hom(T 2 ). Passing to the lift of T 2, that is R 2, we rewrite last equation as g (Id + h) = h L L h. Define L( h) = h L L h. Last equation becomes g (Id + h) = L( h). Define T ( h) = g (Id + h). Last equation becomes T ( h) = L( h) h = L 1 T ( h). Prove that when g is C 1 close to L, operator L 1 T is a contraction. Thus, it has a fixed point. Prove that the fixed point is what you were looking for.
13 Things to remember So: Hyperbolic theory provides us with simple examples of chaotic behavior, which are amenable to analytical study. It also proves that hyperbolic chaos is a stable property, thus we cannot sweep it under the carpet. Anything else?
14 Attractors Simple, hyperbolic, strange, chaotic... Definition Let f : X X be a continuous dynamical system of the topological space X. The subset A X is called an attractor for f if there exists an open set V A such that f (V ) V and A = n N f n (V ). A hyperbolic attractor is an attractor which is also a hyperbolic set. A chaotic attractor is an attractor which also fulfills the definition of chaos. A strange attractor is an attractor which has a fractal structure. Example The origin is a (simple) attractor for f : R 2 R 2, f (x, y) = ( 1 2 x, 1 2 y).
15 The DA attractor Derived from Anosov Let us return to the hyperbolic toral L : T 2 T 2 studied above. Denote by p 0 the fixed point corresponding to the origin. Let δ : R R be a smooth function such that 0 δ(x) 1, x R and δ(x) = 0 for x r 0 and δ(x) = 1 for x r 0 /2, where r 0 > 0 but small enough. Consider the differential equations u 1 = 0 u 2 = u 2 δ( (u 1, u 2 ) ) and denote by ϕ t (u 1, u 2 ) their flow. Define the DA diffeomorphism f : T 2 T 2 as f (u 1, u 2 ) = ϕ τ L(u 1, u 2 ) where τ > 0 any fixed number such that e τ λ 2 > 1.

16 Theorem The DA diffeomorphism has a non wondering set consisting of the repelling fixed point p 0 and a set Λ, which is a hyperbolic chaotic attractor for f. The DA attractor (in red).
 is repelling. There exists a square S on which φ acts as shown on the figure bellow, by expanding vertical directions and contracting the horizontal ones.")
17 Smale s horseshoe (What really happened at the beaches of Rio) Define a diffeomorpshism φ : R 2 { } R 2 { } as follows: The point at infinity (denoted by { }) is repelling. There exists a square S on which φ acts as shown on the figure bellow, by expanding vertical directions and contracting the horizontal ones.
18 Definition We define H = n Z φ n (S) and the mapping φ H : H H. This mapping is called the classical Smale s horseshoe. Theorem Smale s horseshoe is a hyperbolic chaotic set.
 D 2.")
19 The solenoid attractor Or Smale Williams attractor Consider the solid torus S 1 D 2, equipped with coordinates φ S 1, (x, y) D 2. Define: f : S 1 D 2 S 1 D 2 f (φ, x, y) = (2φ, 1 10 x cosφ, 1 10 y sinφ).
20 It is really easy to prove that f is 1 1 and that f (S 1 D 2 ) S 1 D 2. Definition The solenoid attractor is defined to be S = n N f n (S 1 D 2 ), equipped with the dynamics f S : S S. Theorem S is a hyperbolic chaotic attractor for f. Proof. One easily verifies the so called cone conditions.
21 The Plykin attractor Consider the following differential equations on the S 2 R 3. Flow down along circles of latidude: Rotation around the z axis: ẋ = ɛxy 2, ẏ = ɛx 2 y, ż = 0. ẋ = π( 1 2 z )y, ẏ = π( 2 z )x, ż = 0. Flow down to the equator: Rotation around the x axis: ẋ = 0, ẏ = ɛyz 2, ż = ɛy 2 z. ẋ = 0, ẏ = π( 1 2 z )z, ż = π( 1 2 z )y. Following the flows of these o.d.e. s for time equal to 1 unit, and then repeating this procedure, we have (for ɛ = 0.77):
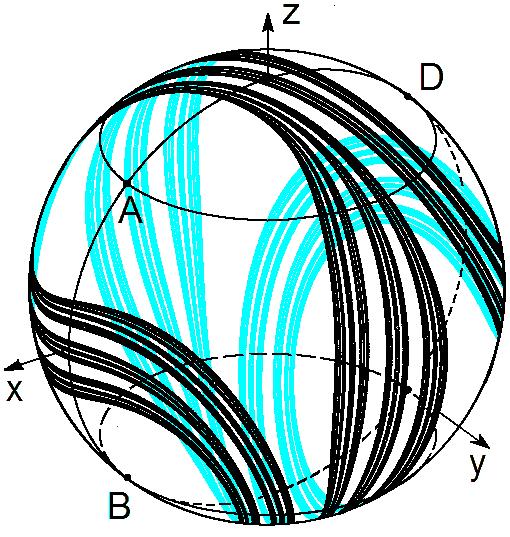
22
23 Things to remember So: Hyperbolic theory provides us with simple examples of chaotic behavior, which are amenable to analytical study. It also proves that hyperbolic chaos is a stable property, thus we cannot sweep it under the carpet. It teaches us that one can not escape chaos, since chaotic sets are usually attracting. The chaotic attractors provided by the theory are also ammenable to analytical study (and really beautiful!). Anything else?
24 The map of Hénon has a horseshoe Let us recall Hénon map: h s : R 2 R 2, h s (x, y) = (1 + y ax 2, bx), presented in: Hénon M, A two dimensional mapping with a strange attractor, Comm.Math.Phys., 50(1), 69-77,1976.
25 Nowadays its more common to study its topologically conjugate standard Hénon map: h : R 2 R 2, h(x, y) = (y, βx + a y 2 ). We consider the square S = {x, y R 2, x, y [ 3, 3]}
26 Let us calculate the set S h(s)
27 Thus, the standard Hénon map possesses a geometrical horseshoe. Is it however a true horseshoe, that is, a hyperbolic chaotic invariant set having the structure described by Smale? Yes, it is. Devaney R L, Nitecki Z, Shift s in the Hénon mapping, Comm.Math.Phys., 67, , 1979.
 Actually, since then, we have found horseshoes in many dynamical systems.")
28 Leonid Pavlovich Shilnikov, Or how to prove that there is a horseshoe arround (and much much more...) Actually, since then, we have found horseshoes in many dynamical systems. To accomplish that, we usually employ Shilnikov s theorem.
29 Alternately excited van del Pol oscillators Let us consider the following system of differential equations: ẍ (A cos 2πt T x 2 )ẋ + ω 2 0x = ɛy cos(ω 0 t) ÿ ( A cos 2πt T y 2 )ẏ + 4ω 2 0y = ɛx 2, where T = 2πN ω 0 = 6, ω 0 = 2π, A = 5, ɛ = 0.5. It s extended phase space is 5 dimensional. We can define a 4 dimensional Poincaré section P. Poincaré map T : P P has a forward invariant set D S D 3. Let us draw (the 3 dimensional projection of) D and T (D).

30 Example of a physical system with an attractor of the Smale Williams type S P Kuznetsov Phys.Rev.Lett. (95), , 2005.
31 Kuznetsov gave us a detailed (numerical) study of: Construction of the Poincaré map. Existence of the forward invariant set D. Existence of a solenoid attractor. Numerical verification of its hyperbolicity (through cone conditions). All these were made completely rigorous in: Uniformly hyperbolic attractor of the Smale Williams type for a Poincaré map in a Kuznetsov system D Wilczak SIAM J.Appl.Dyn.Syst., 9(4), , 2010.
32 Non autonomous coupled oscillators Let a, b C and consider the following system of o.d.e. s. ȧ = iɛ(1 σ 2 s 2 )Im(a 2 b 2 )a iσπ( a 2 )a π 4 sb s2 (1 a 2 b 2 )a ḃ = iɛ(1 σ2 s 2 )Im(a 2 b 2 )b iσπ( b 2 )b + π 4 sa s2 (1 a 2 b 2 )b. In the sustained regime of self oscillations the relation a 2 + b 2 = 1 holds.
, 013114, 2009.")
33 Plykin type of attractor in non autonomous coupled oscillators S P Kuznetsov Chaos (19), , Exercise: Verify rigorously his statements.
34 The list continues. Anosov parameter values for the triple linkage and a physical system with a uniformly chaotic attractor T J Hunt, R S MackKay Nonlinearity, 16, 4, Hyperbolic Plykin attractor can exist in neuron models Belykh V, Belykh I, Mosekilde E Int.J.Bif.Ch. 15(11), , Autonomous coupled oscillators with hyperbolic strange attractors Kuznetsov S, Pikovsky A Physica D, 232, , Robust chaos in autonomous time delay systems Arzhanukhina D S, Kuznetsov S to appear, 2017.
35 Things to remember So: Hyperbolic theory provides us with simple examples of chaotic behavior, which are amenable to analytical study. It also proves that hyperbolic chaos is a stable property, thus we cannot sweep it under the carpet. It teaches us that one can not escape chaos, since chaotic sets are usually attracting. The chaotic attractors provided by the theory are also ammenable to analytical study (and really beautiful!). In of all sorts we come across hyperbolic constructions.
36 Why won t go away It provides the mathematical framework to discuss concepts such as stability, genericity, equidistribution. It is present in everyday. Actually, it contains a famous branch of geometry (hyperbolic riemannian geometry). Dynamical systems that are not hyperbolic might be singular hyperbolic. To study Singular Hyperbolic Theory one should be familiar with... (try to guess).
37 For Further Reading I Clark Robinson Dynamical CRC Press, Anatole Katok, Boris Hasselblatt Introduction to the Modern Theory Cambridge University Press, Appendix For Further Reading Stephen Smale Differentiable dynamical systems Bull.Am.Math.Society, 73(6): , 1967.
DYNAMICAL SYSTEMS. I Clark: Robinson. Stability, Symbolic Dynamics, and Chaos. CRC Press Boca Raton Ann Arbor London Tokyo
 DYNAMICAL SYSTEMS Stability, Symbolic Dynamics, and Chaos I Clark: Robinson CRC Press Boca Raton Ann Arbor London Tokyo Contents Chapter I. Introduction 1 1.1 Population Growth Models, One Population 2
DYNAMICAL SYSTEMS Stability, Symbolic Dynamics, and Chaos I Clark: Robinson CRC Press Boca Raton Ann Arbor London Tokyo Contents Chapter I. Introduction 1 1.1 Population Growth Models, One Population 2
April 13, We now extend the structure of the horseshoe to more general kinds of invariant. x (v) λ n v.
 λ n v.") April 3, 005 - Hyperbolic Sets We now extend the structure of the horseshoe to more general kinds of invariant sets. Let r, and let f D r (M) where M is a Riemannian manifold. A compact f invariant set
April 3, 005 - Hyperbolic Sets We now extend the structure of the horseshoe to more general kinds of invariant sets. Let r, and let f D r (M) where M is a Riemannian manifold. A compact f invariant set
Hyperbolic Dynamics. Todd Fisher. Department of Mathematics University of Maryland, College Park. Hyperbolic Dynamics p.
 Hyperbolic Dynamics p. 1/36 Hyperbolic Dynamics Todd Fisher tfisher@math.umd.edu Department of Mathematics University of Maryland, College Park Hyperbolic Dynamics p. 2/36 What is a dynamical system? Phase
Hyperbolic Dynamics p. 1/36 Hyperbolic Dynamics Todd Fisher tfisher@math.umd.edu Department of Mathematics University of Maryland, College Park Hyperbolic Dynamics p. 2/36 What is a dynamical system? Phase
The Structure of Hyperbolic Sets
 The Structure of Hyperbolic Sets p. 1/35 The Structure of Hyperbolic Sets Todd Fisher tfisher@math.umd.edu Department of Mathematics University of Maryland, College Park The Structure of Hyperbolic Sets
The Structure of Hyperbolic Sets p. 1/35 The Structure of Hyperbolic Sets Todd Fisher tfisher@math.umd.edu Department of Mathematics University of Maryland, College Park The Structure of Hyperbolic Sets
HYPERBOLIC SETS WITH NONEMPTY INTERIOR
 HYPERBOLIC SETS WITH NONEMPTY INTERIOR TODD FISHER, UNIVERSITY OF MARYLAND Abstract. In this paper we study hyperbolic sets with nonempty interior. We prove the folklore theorem that every transitive hyperbolic
HYPERBOLIC SETS WITH NONEMPTY INTERIOR TODD FISHER, UNIVERSITY OF MARYLAND Abstract. In this paper we study hyperbolic sets with nonempty interior. We prove the folklore theorem that every transitive hyperbolic
DYNAMICAL SYSTEMS PROBLEMS. asgor/ (1) Which of the following maps are topologically transitive (minimal,
 Which of the following maps are topologically transitive (minimal,") DYNAMICAL SYSTEMS PROBLEMS http://www.math.uci.edu/ asgor/ (1) Which of the following maps are topologically transitive (minimal, topologically mixing)? identity map on a circle; irrational rotation of
DYNAMICAL SYSTEMS PROBLEMS http://www.math.uci.edu/ asgor/ (1) Which of the following maps are topologically transitive (minimal, topologically mixing)? identity map on a circle; irrational rotation of
MARKOV PARTITIONS FOR HYPERBOLIC SETS
 MARKOV PARTITIONS FOR HYPERBOLIC SETS TODD FISHER, HIMAL RATHNAKUMARA Abstract. We show that if f is a diffeomorphism of a manifold to itself, Λ is a mixing (or transitive) hyperbolic set, and V is a neighborhood
MARKOV PARTITIONS FOR HYPERBOLIC SETS TODD FISHER, HIMAL RATHNAKUMARA Abstract. We show that if f is a diffeomorphism of a manifold to itself, Λ is a mixing (or transitive) hyperbolic set, and V is a neighborhood
B5.6 Nonlinear Systems
 B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
B5.6 Nonlinear Systems 5. Global Bifurcations, Homoclinic chaos, Melnikov s method Alain Goriely 2018 Mathematical Institute, University of Oxford Table of contents 1. Motivation 1.1 The problem 1.2 A
The Existence of Chaos in the Lorenz System
 The Existence of Chaos in the Lorenz System Sheldon E. Newhouse Mathematics Department Michigan State University E. Lansing, MI 48864 joint with M. Berz, K. Makino, A. Wittig Physics, MSU Y. Zou, Math,
The Existence of Chaos in the Lorenz System Sheldon E. Newhouse Mathematics Department Michigan State University E. Lansing, MI 48864 joint with M. Berz, K. Makino, A. Wittig Physics, MSU Y. Zou, Math,
Smooth Ergodic Theory and Nonuniformly Hyperbolic Dynamics
 CHAPTER 2 Smooth Ergodic Theory and Nonuniformly Hyperbolic Dynamics Luis Barreira Departamento de Matemática, Instituto Superior Técnico, 1049-001 Lisboa, Portugal E-mail: barreira@math.ist.utl.pt url:
CHAPTER 2 Smooth Ergodic Theory and Nonuniformly Hyperbolic Dynamics Luis Barreira Departamento de Matemática, Instituto Superior Técnico, 1049-001 Lisboa, Portugal E-mail: barreira@math.ist.utl.pt url:
11 Chaos in Continuous Dynamical Systems.
 11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
11 CHAOS IN CONTINUOUS DYNAMICAL SYSTEMS. 47 11 Chaos in Continuous Dynamical Systems. Let s consider a system of differential equations given by where x(t) : R R and f : R R. ẋ = f(x), The linearization
Stabilization of Hyperbolic Chaos by the Pyragas Method
 Journal of Mathematics and System Science 4 (014) 755-76 D DAVID PUBLISHING Stabilization of Hyperbolic Chaos by the Pyragas Method Sergey Belyakin, Arsen Dzanoev, Sergey Kuznetsov Physics Faculty, Moscow
Journal of Mathematics and System Science 4 (014) 755-76 D DAVID PUBLISHING Stabilization of Hyperbolic Chaos by the Pyragas Method Sergey Belyakin, Arsen Dzanoev, Sergey Kuznetsov Physics Faculty, Moscow
Robustly transitive diffeomorphisms
 Robustly transitive diffeomorphisms Todd Fisher tfisher@math.byu.edu Department of Mathematics, Brigham Young University Summer School, Chengdu, China 2009 Dynamical systems The setting for a dynamical
Robustly transitive diffeomorphisms Todd Fisher tfisher@math.byu.edu Department of Mathematics, Brigham Young University Summer School, Chengdu, China 2009 Dynamical systems The setting for a dynamical
WHAT IS A CHAOTIC ATTRACTOR?
 WHAT IS A CHAOTIC ATTRACTOR? CLARK ROBINSON Abstract. Devaney gave a mathematical definition of the term chaos, which had earlier been introduced by Yorke. We discuss issues involved in choosing the properties
WHAT IS A CHAOTIC ATTRACTOR? CLARK ROBINSON Abstract. Devaney gave a mathematical definition of the term chaos, which had earlier been introduced by Yorke. We discuss issues involved in choosing the properties
1 Introduction Definitons Markov... 2
 Compact course notes Dynamic systems Fall 2011 Professor: Y. Kudryashov transcribed by: J. Lazovskis Independent University of Moscow December 23, 2011 Contents 1 Introduction 2 1.1 Definitons...............................................
Compact course notes Dynamic systems Fall 2011 Professor: Y. Kudryashov transcribed by: J. Lazovskis Independent University of Moscow December 23, 2011 Contents 1 Introduction 2 1.1 Definitons...............................................
Dynamical Systems and Ergodic Theory PhD Exam Spring Topics: Topological Dynamics Definitions and basic results about the following for maps and
 Dynamical Systems and Ergodic Theory PhD Exam Spring 2012 Introduction: This is the first year for the Dynamical Systems and Ergodic Theory PhD exam. As such the material on the exam will conform fairly
Dynamical Systems and Ergodic Theory PhD Exam Spring 2012 Introduction: This is the first year for the Dynamical Systems and Ergodic Theory PhD exam. As such the material on the exam will conform fairly
2000 Mathematics Subject Classification. Primary: 37D25, 37C40. Abstract. This book provides a systematic introduction to smooth ergodic theory, inclu
 Lyapunov Exponents and Smooth Ergodic Theory Luis Barreira and Yakov B. Pesin 2000 Mathematics Subject Classification. Primary: 37D25, 37C40. Abstract. This book provides a systematic introduction to smooth
Lyapunov Exponents and Smooth Ergodic Theory Luis Barreira and Yakov B. Pesin 2000 Mathematics Subject Classification. Primary: 37D25, 37C40. Abstract. This book provides a systematic introduction to smooth
On Periodic points of area preserving torus homeomorphisms
 On Periodic points of area preserving torus homeomorphisms Fábio Armando Tal and Salvador Addas-Zanata Instituto de Matemática e Estatística Universidade de São Paulo Rua do Matão 11, Cidade Universitária,
On Periodic points of area preserving torus homeomorphisms Fábio Armando Tal and Salvador Addas-Zanata Instituto de Matemática e Estatística Universidade de São Paulo Rua do Matão 11, Cidade Universitária,
EXISTENCE OF CONJUGACIES AND STABLE MANIFOLDS VIA SUSPENSIONS
 Electronic Journal of Differential Equations, Vol. 2017 (2017), No. 172, pp. 1 11. ISSN: 1072-6691. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu EXISTENCE OF CONJUGACIES AND STABLE MANIFOLDS
Electronic Journal of Differential Equations, Vol. 2017 (2017), No. 172, pp. 1 11. ISSN: 1072-6691. URL: http://ejde.math.txstate.edu or http://ejde.math.unt.edu EXISTENCE OF CONJUGACIES AND STABLE MANIFOLDS
PHY411 Lecture notes Part 5
 PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
PHY411 Lecture notes Part 5 Alice Quillen January 27, 2016 Contents 0.1 Introduction.................................... 1 1 Symbolic Dynamics 2 1.1 The Shift map.................................. 3 1.2
Hamiltonian Dynamics
 Hamiltonian Dynamics CDS 140b Joris Vankerschaver jv@caltech.edu CDS Feb. 10, 2009 Joris Vankerschaver (CDS) Hamiltonian Dynamics Feb. 10, 2009 1 / 31 Outline 1. Introductory concepts; 2. Poisson brackets;
Hamiltonian Dynamics CDS 140b Joris Vankerschaver jv@caltech.edu CDS Feb. 10, 2009 Joris Vankerschaver (CDS) Hamiltonian Dynamics Feb. 10, 2009 1 / 31 Outline 1. Introductory concepts; 2. Poisson brackets;
TRIVIAL CENTRALIZERS FOR AXIOM A DIFFEOMORPHISMS
 TRIVIAL CENTRALIZERS FOR AXIOM A DIFFEOMORPHISMS TODD FISHER Abstract. We show there is a residual set of non-anosov C Axiom A diffeomorphisms with the no cycles property whose elements have trivial centralizer.
TRIVIAL CENTRALIZERS FOR AXIOM A DIFFEOMORPHISMS TODD FISHER Abstract. We show there is a residual set of non-anosov C Axiom A diffeomorphisms with the no cycles property whose elements have trivial centralizer.
EE222 - Spring 16 - Lecture 2 Notes 1
 EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
EE222 - Spring 16 - Lecture 2 Notes 1 Murat Arcak January 21 2016 1 Licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License. Essentially Nonlinear Phenomena Continued
Removing the Noise from Chaos Plus Noise
 Removing the Noise from Chaos Plus Noise Steven P. Lalley Department of Statistics University of Chicago November 5, 2 Abstract The problem of extracting a signal x n generated by a dynamical system from
Removing the Noise from Chaos Plus Noise Steven P. Lalley Department of Statistics University of Chicago November 5, 2 Abstract The problem of extracting a signal x n generated by a dynamical system from
Problems in hyperbolic dynamics
 Problems in hyperbolic dynamics Current Trends in Dynamical Systems and the Mathematical Legacy of Rufus Bowen Vancouver july 31st august 4th 2017 Notes by Y. Coudène, S. Crovisier and T. Fisher 1 Zeta
Problems in hyperbolic dynamics Current Trends in Dynamical Systems and the Mathematical Legacy of Rufus Bowen Vancouver july 31st august 4th 2017 Notes by Y. Coudène, S. Crovisier and T. Fisher 1 Zeta
Chapter 23. Predicting Chaos The Shift Map and Symbolic Dynamics
 Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
Chapter 23 Predicting Chaos We have discussed methods for diagnosing chaos, but what about predicting the existence of chaos in a dynamical system. This is a much harder problem, and it seems that the
LECTURES ON PARTIAL HYPERBOLICITY AND STABLE ERGODICITY
 LECTURES ON PARTIAL HYPERBOLICITY AND STABLE ERGODICITY YA. PESIN 1. Introduction 2 2. The Concept of Hyperbolicity 5 2.1. Complete hyperbolicity (Anosov systems) 5 2.2. Definition of partial hyperbolicity
LECTURES ON PARTIAL HYPERBOLICITY AND STABLE ERGODICITY YA. PESIN 1. Introduction 2 2. The Concept of Hyperbolicity 5 2.1. Complete hyperbolicity (Anosov systems) 5 2.2. Definition of partial hyperbolicity
Defining Chaos. Brittany Rock
 Defining Chaos by Brittany Rock A thesis submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements for the Degree of Master of Science Auburn, Alabama August, 207
Defining Chaos by Brittany Rock A thesis submitted to the Graduate Faculty of Auburn University in partial fulfillment of the requirements for the Degree of Master of Science Auburn, Alabama August, 207
APPPHYS217 Tuesday 25 May 2010
 APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
APPPHYS7 Tuesday 5 May Our aim today is to take a brief tour of some topics in nonlinear dynamics. Some good references include: [Perko] Lawrence Perko Differential Equations and Dynamical Systems (Springer-Verlag
arxiv:math/ v1 [math.ds] 28 Apr 2003
![arxiv:math/ v1 [math.ds] 28 Apr 2003](/thumbs/81/84707117.jpg "arxiv:math/ v1 [math.ds] 28 Apr 2003") ICM 2002 Vol. III 1 3 arxiv:math/0304457v1 [math.ds] 28 Apr 2003 Bifurcations and Strange Attractors Leonid Shilnikov Abstract We reviews the theory of strange attractors and their bifurcations. All known
ICM 2002 Vol. III 1 3 arxiv:math/0304457v1 [math.ds] 28 Apr 2003 Bifurcations and Strange Attractors Leonid Shilnikov Abstract We reviews the theory of strange attractors and their bifurcations. All known
BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs
 BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits: equilibria cycles connecting orbits compact invariant manifolds strange
BIFURCATION PHENOMENA Lecture 4: Bifurcations in n-dimensional ODEs Yuri A. Kuznetsov August, 2010 Contents 1. Solutions and orbits: equilibria cycles connecting orbits compact invariant manifolds strange
Entropy production for a class of inverse SRB measures
 Entropy production for a class of inverse SRB measures Eugen Mihailescu and Mariusz Urbański Keywords: Inverse SRB measures, folded repellers, Anosov endomorphisms, entropy production. Abstract We study
Entropy production for a class of inverse SRB measures Eugen Mihailescu and Mariusz Urbański Keywords: Inverse SRB measures, folded repellers, Anosov endomorphisms, entropy production. Abstract We study
Introduction to Applied Nonlinear Dynamical Systems and Chaos
 Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Stephen Wiggins Introduction to Applied Nonlinear Dynamical Systems and Chaos Second Edition With 250 Figures 4jj Springer I Series Preface v L I Preface to the Second Edition vii Introduction 1 1 Equilibrium
Introduction to Continuous Dynamical Systems
 Lecture Notes on Introduction to Continuous Dynamical Systems Fall, 2012 Lee, Keonhee Department of Mathematics Chungnam National Univeristy - 1 - Chap 0. Introduction What is a dynamical system? A dynamical
Lecture Notes on Introduction to Continuous Dynamical Systems Fall, 2012 Lee, Keonhee Department of Mathematics Chungnam National Univeristy - 1 - Chap 0. Introduction What is a dynamical system? A dynamical
TWO DIMENSIONAL FLOWS. Lecture 5: Limit Cycles and Bifurcations
 TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
TWO DIMENSIONAL FLOWS Lecture 5: Limit Cycles and Bifurcations 5. Limit cycles A limit cycle is an isolated closed trajectory [ isolated means that neighbouring trajectories are not closed] Fig. 5.1.1
ON HYPERBOLIC MEASURES AND PERIODIC ORBITS
 ON HYPERBOLIC MEASURES AND PERIODIC ORBITS ILIE UGARCOVICI Dedicated to Anatole Katok on the occasion of his 60th birthday Abstract. We prove that if a diffeomorphism on a compact manifold preserves a
ON HYPERBOLIC MEASURES AND PERIODIC ORBITS ILIE UGARCOVICI Dedicated to Anatole Katok on the occasion of his 60th birthday Abstract. We prove that if a diffeomorphism on a compact manifold preserves a
Exact Devaney Chaos and Entropy
 QUALITATIVE THEORY DYNAMICAL SYSTEMS 6, 169 179 (2005) ARTICLE NO. 95 Exact Devaney Chaos and Entropy Dominik Kwietniak Institute of Mathematics, Jagiellonian University, Reymonta 4, 30-059 Kraków, Poland
QUALITATIVE THEORY DYNAMICAL SYSTEMS 6, 169 179 (2005) ARTICLE NO. 95 Exact Devaney Chaos and Entropy Dominik Kwietniak Institute of Mathematics, Jagiellonian University, Reymonta 4, 30-059 Kraków, Poland
PATH CONNECTEDNESS AND ENTROPY DENSITY OF THE SPACE OF HYPERBOLIC ERGODIC MEASURES
 PATH CONNECTEDNESS AND ENTROPY DENSITY OF THE SPACE OF HYPERBOLIC ERGODIC MEASURES ANTON GORODETSKI AND YAKOV PESIN Abstract. We show that the space of hyperbolic ergodic measures of a given index supported
PATH CONNECTEDNESS AND ENTROPY DENSITY OF THE SPACE OF HYPERBOLIC ERGODIC MEASURES ANTON GORODETSKI AND YAKOV PESIN Abstract. We show that the space of hyperbolic ergodic measures of a given index supported
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II.
 Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Mathematical Foundations of Neuroscience - Lecture 7. Bifurcations II. Filip Piękniewski Faculty of Mathematics and Computer Science, Nicolaus Copernicus University, Toruń, Poland Winter 2009/2010 Filip
Synchronization, Chaos, and the Dynamics of Coupled Oscillators. Supplemental 1. Winter Zachary Adams Undergraduate in Mathematics and Biology
 Synchronization, Chaos, and the Dynamics of Coupled Oscillators Supplemental 1 Winter 2017 Zachary Adams Undergraduate in Mathematics and Biology Outline: The shift map is discussed, and a rigorous proof
Synchronization, Chaos, and the Dynamics of Coupled Oscillators Supplemental 1 Winter 2017 Zachary Adams Undergraduate in Mathematics and Biology Outline: The shift map is discussed, and a rigorous proof
Nonlocally Maximal Hyperbolic Sets for Flows
 Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2015-06-01 Nonlocally Maximal Hyperbolic Sets for Flows Taylor Michael Petty Brigham Young University - Provo Follow this and additional
Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2015-06-01 Nonlocally Maximal Hyperbolic Sets for Flows Taylor Michael Petty Brigham Young University - Provo Follow this and additional
Persistent Chaos in High-Dimensional Neural Networks
 Persistent Chaos in High-Dimensional Neural Networks D. J. Albers with J. C. Sprott and James P. Crutchfield February 20, 2005 1 Outline: Introduction and motivation Mathematical versus computational dynamics
Persistent Chaos in High-Dimensional Neural Networks D. J. Albers with J. C. Sprott and James P. Crutchfield February 20, 2005 1 Outline: Introduction and motivation Mathematical versus computational dynamics
An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems
 An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems Scott Zimmerman MATH181HM: Dynamical Systems Spring 2008 1 Introduction The Hartman-Grobman and Poincaré-Bendixon Theorems
An Undergraduate s Guide to the Hartman-Grobman and Poincaré-Bendixon Theorems Scott Zimmerman MATH181HM: Dynamical Systems Spring 2008 1 Introduction The Hartman-Grobman and Poincaré-Bendixon Theorems
Mechanisms of Chaos: Stable Instability
 Mechanisms of Chaos: Stable Instability Reading for this lecture: NDAC, Sec. 2.-2.3, 9.3, and.5. Unpredictability: Orbit complicated: difficult to follow Repeatedly convergent and divergent Net amplification
Mechanisms of Chaos: Stable Instability Reading for this lecture: NDAC, Sec. 2.-2.3, 9.3, and.5. Unpredictability: Orbit complicated: difficult to follow Repeatedly convergent and divergent Net amplification
8.1 Bifurcations of Equilibria
 1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
1 81 Bifurcations of Equilibria Bifurcation theory studies qualitative changes in solutions as a parameter varies In general one could study the bifurcation theory of ODEs PDEs integro-differential equations
Periodic Sinks and Observable Chaos
 Periodic Sinks and Observable Chaos Systems of Study: Let M = S 1 R. T a,b,l : M M is a three-parameter family of maps defined by where θ S 1, r R. θ 1 = a+θ +Lsin2πθ +r r 1 = br +blsin2πθ Outline of Contents:
Periodic Sinks and Observable Chaos Systems of Study: Let M = S 1 R. T a,b,l : M M is a three-parameter family of maps defined by where θ S 1, r R. θ 1 = a+θ +Lsin2πθ +r r 1 = br +blsin2πθ Outline of Contents:
Hyperbolic Sets That are Not Locally Maximal
 Hyperbolic Sets That are Not Locally Maximal Todd Fisher December 6, 2004 Abstract This papers addresses the following topics relating to the structure of hyperbolic sets: First, hyperbolic sets that are
Hyperbolic Sets That are Not Locally Maximal Todd Fisher December 6, 2004 Abstract This papers addresses the following topics relating to the structure of hyperbolic sets: First, hyperbolic sets that are
Complicated behavior of dynamical systems. Mathematical methods and computer experiments.
 Complicated behavior of dynamical systems. Mathematical methods and computer experiments. Kuznetsov N.V. 1, Leonov G.A. 1, and Seledzhi S.M. 1 St.Petersburg State University Universitetsky pr. 28 198504
Complicated behavior of dynamical systems. Mathematical methods and computer experiments. Kuznetsov N.V. 1, Leonov G.A. 1, and Seledzhi S.M. 1 St.Petersburg State University Universitetsky pr. 28 198504
Construction of Lyapunov functions by validated computation
 Construction of Lyapunov functions by validated computation Nobito Yamamoto 1, Kaname Matsue 2, and Tomohiro Hiwaki 1 1 The University of Electro-Communications, Tokyo, Japan yamamoto@im.uec.ac.jp 2 The
Construction of Lyapunov functions by validated computation Nobito Yamamoto 1, Kaname Matsue 2, and Tomohiro Hiwaki 1 1 The University of Electro-Communications, Tokyo, Japan yamamoto@im.uec.ac.jp 2 The
A simple computable criteria for the existence of horseshoes
 A simple computable criteria for the existence of horseshoes Salvador Addas-Zanata Instituto de Matemática e Estatística Universidade de São Paulo Rua do Matão 1010, Cidade Universitária, 05508-090 São
A simple computable criteria for the existence of horseshoes Salvador Addas-Zanata Instituto de Matemática e Estatística Universidade de São Paulo Rua do Matão 1010, Cidade Universitária, 05508-090 São
Summary of topics relevant for the final. p. 1
 Summary of topics relevant for the final p. 1 Outline Scalar difference equations General theory of ODEs Linear ODEs Linear maps Analysis near fixed points (linearization) Bifurcations How to analyze a
Summary of topics relevant for the final p. 1 Outline Scalar difference equations General theory of ODEs Linear ODEs Linear maps Analysis near fixed points (linearization) Bifurcations How to analyze a
A geometric approach for constructing SRB measures. measures in hyperbolic dynamics
 A geometric approach for constructing SRB measures in hyperbolic dynamics Pennsylvania State University Conference on Current Trends in Dynamical Systems and the Mathematical Legacy of Rufus Bowen August
A geometric approach for constructing SRB measures in hyperbolic dynamics Pennsylvania State University Conference on Current Trends in Dynamical Systems and the Mathematical Legacy of Rufus Bowen August
Lectures on Periodic Orbits
 Lectures on Periodic Orbits 11 February 2009 Most of the contents of these notes can found in any typical text on dynamical systems, most notably Strogatz [1994], Perko [2001] and Verhulst [1996]. Complete
Lectures on Periodic Orbits 11 February 2009 Most of the contents of these notes can found in any typical text on dynamical systems, most notably Strogatz [1994], Perko [2001] and Verhulst [1996]. Complete
arxiv: v1 [math.ds] 20 Apr 2008
![arxiv: v1 [math.ds] 20 Apr 2008](/thumbs/94/120119602.jpg "arxiv: v1 [math.ds] 20 Apr 2008") HYPERBOLIC DYNAMICAL SYSTEMS arxiv:0804.3192v1 [math.ds] 20 Apr 2008 VITOR ARAÚJO AND MARCELO VIANA CONTENTS Glossary 1 Definition 2 1. Introduction 3 2. Linear systems 3 3. Local theory 5 4. Hyperbolic
HYPERBOLIC DYNAMICAL SYSTEMS arxiv:0804.3192v1 [math.ds] 20 Apr 2008 VITOR ARAÚJO AND MARCELO VIANA CONTENTS Glossary 1 Definition 2 1. Introduction 3 2. Linear systems 3 3. Local theory 5 4. Hyperbolic
Essential hyperbolicity versus homoclinic bifurcations. Global dynamics beyond uniform hyperbolicity, Beijing 2009 Sylvain Crovisier - Enrique Pujals
 Essential hyperbolicity versus homoclinic bifurcations Global dynamics beyond uniform hyperbolicity, Beijing 2009 Sylvain Crovisier - Enrique Pujals Generic dynamics Consider: M: compact boundaryless manifold,
Essential hyperbolicity versus homoclinic bifurcations Global dynamics beyond uniform hyperbolicity, Beijing 2009 Sylvain Crovisier - Enrique Pujals Generic dynamics Consider: M: compact boundaryless manifold,
Period-doubling cascades of a Silnikov equation
 Period-doubling cascades of a Silnikov equation Keying Guan and Beiye Feng Science College, Beijing Jiaotong University, Email: keying.guan@gmail.com Institute of Applied Mathematics, Academia Sinica,
Period-doubling cascades of a Silnikov equation Keying Guan and Beiye Feng Science College, Beijing Jiaotong University, Email: keying.guan@gmail.com Institute of Applied Mathematics, Academia Sinica,
Foliation dynamics, shape and classification
 Foliation dynamics, shape and classification Steve Hurder University of Illinois at Chicago www.math.uic.edu/ hurder Theorem: [Denjoy, 1932] There exist a C 1 -foliation F of codimension-1 with an exceptional
Foliation dynamics, shape and classification Steve Hurder University of Illinois at Chicago www.math.uic.edu/ hurder Theorem: [Denjoy, 1932] There exist a C 1 -foliation F of codimension-1 with an exceptional
Introduction Knot Theory Nonlinear Dynamics Topology in Chaos Open Questions Summary. Topology in Chaos
 Introduction Knot Theory Nonlinear Dynamics Open Questions Summary A tangled tale about knot, link, template, and strange attractor Centre for Chaos & Complex Networks City University of Hong Kong Email:
Introduction Knot Theory Nonlinear Dynamics Open Questions Summary A tangled tale about knot, link, template, and strange attractor Centre for Chaos & Complex Networks City University of Hong Kong Email:
SYMBOLIC DYNAMICS FOR HYPERBOLIC SYSTEMS. 1. Introduction (30min) We want to find simple models for uniformly hyperbolic systems, such as for:
 We want to find simple models for uniformly hyperbolic systems, such as for:") SYMBOLIC DYNAMICS FOR HYPERBOLIC SYSTEMS YURI LIMA 1. Introduction (30min) We want to find simple models for uniformly hyperbolic systems, such as for: [ ] 2 1 Hyperbolic toral automorphisms, e.g. f A
SYMBOLIC DYNAMICS FOR HYPERBOLIC SYSTEMS YURI LIMA 1. Introduction (30min) We want to find simple models for uniformly hyperbolic systems, such as for: [ ] 2 1 Hyperbolic toral automorphisms, e.g. f A
ROBUST MINIMALITY OF ITERATED FUNCTION SYSTEMS WITH TWO GENERATORS
 ROBUST MINIMALITY OF ITERATED FUNCTION SYSTEMS WITH TWO GENERATORS ALE JAN HOMBURG AND MEYSAM NASSIRI Abstract. We prove that any compact manifold without boundary admits a pair of diffeomorphisms that
ROBUST MINIMALITY OF ITERATED FUNCTION SYSTEMS WITH TWO GENERATORS ALE JAN HOMBURG AND MEYSAM NASSIRI Abstract. We prove that any compact manifold without boundary admits a pair of diffeomorphisms that
HYPERBOLIC DYNAMICAL SYSTEMS AND THE NONCOMMUTATIVE INTEGRATION THEORY OF CONNES ABSTRACT
 HYPERBOLIC DYNAMICAL SYSTEMS AND THE NONCOMMUTATIVE INTEGRATION THEORY OF CONNES Jan Segert ABSTRACT We examine hyperbolic differentiable dynamical systems in the context of Connes noncommutative integration
HYPERBOLIC DYNAMICAL SYSTEMS AND THE NONCOMMUTATIVE INTEGRATION THEORY OF CONNES Jan Segert ABSTRACT We examine hyperbolic differentiable dynamical systems in the context of Connes noncommutative integration
Coexistence of Zero and Nonzero Lyapunov Exponents
 Coexistence of Zero and Nonzero Lyapunov Exponents Jianyu Chen Pennsylvania State University July 13, 2011 Outline Notions and Background Hyperbolicity Coexistence Construction of M 5 Construction of the
Coexistence of Zero and Nonzero Lyapunov Exponents Jianyu Chen Pennsylvania State University July 13, 2011 Outline Notions and Background Hyperbolicity Coexistence Construction of M 5 Construction of the
Problem List MATH 5173 Spring, 2014
 Problem List MATH 5173 Spring, 2014 The notation p/n means the problem with number n on page p of Perko. 1. 5/3 [Due Wednesday, January 15] 2. 6/5 and describe the relationship of the phase portraits [Due
Problem List MATH 5173 Spring, 2014 The notation p/n means the problem with number n on page p of Perko. 1. 5/3 [Due Wednesday, January 15] 2. 6/5 and describe the relationship of the phase portraits [Due
(Non-)Existence of periodic orbits in dynamical systems
Existence of periodic orbits in dynamical systems") (Non-)Existence of periodic orbits in dynamical systems Konstantin Athanassopoulos Department of Mathematics and Applied Mathematics University of Crete June 3, 2014 onstantin Athanassopoulos (Univ. of
(Non-)Existence of periodic orbits in dynamical systems Konstantin Athanassopoulos Department of Mathematics and Applied Mathematics University of Crete June 3, 2014 onstantin Athanassopoulos (Univ. of
Thermodynamics of Chaotic systems by C. Beck and F Schlögl (1993) LecturesonGeometryandDynamicalSystemsbyY.PesinandV.Clemenhaga
 LecturesonGeometryandDynamicalSystemsbyY.PesinandV.Clemenhaga") ME597B/MATH597G/PHYS597C Spring, 2015 Chapter 01: Dynamical Systems Source Thermodynamics of Chaotic systems by C. Beck and F Schlögl (1993) LecturesonGeometryandDynamicalSystemsbyY.PesinandV.Clemenhaga
ME597B/MATH597G/PHYS597C Spring, 2015 Chapter 01: Dynamical Systems Source Thermodynamics of Chaotic systems by C. Beck and F Schlögl (1993) LecturesonGeometryandDynamicalSystemsbyY.PesinandV.Clemenhaga
On the dynamics of strongly tridiagonal competitive-cooperative system
 On the dynamics of strongly tridiagonal competitive-cooperative system Chun Fang University of Helsinki International Conference on Advances on Fractals and Related Topics, Hong Kong December 14, 2012
On the dynamics of strongly tridiagonal competitive-cooperative system Chun Fang University of Helsinki International Conference on Advances on Fractals and Related Topics, Hong Kong December 14, 2012
4 There are many equivalent metrics used in the literature. 5 Sometimes the definition is that for any open sets U
 5. The binary shift 5 SYMBOLIC DYNAMICS Applied Dynamical Systems This file was processed January 7, 208. 5 Symbolic dynamics 5. The binary shift The special case r = 4 of the logistic map, or the equivalent
5. The binary shift 5 SYMBOLIC DYNAMICS Applied Dynamical Systems This file was processed January 7, 208. 5 Symbolic dynamics 5. The binary shift The special case r = 4 of the logistic map, or the equivalent
LINEAR CHAOS? Nathan S. Feldman
 LINEAR CHAOS? Nathan S. Feldman In this article we hope to convience the reader that the dynamics of linear operators can be fantastically complex and that linear dynamics exhibits the same beauty and
LINEAR CHAOS? Nathan S. Feldman In this article we hope to convience the reader that the dynamics of linear operators can be fantastically complex and that linear dynamics exhibits the same beauty and
Problem: A class of dynamical systems characterized by a fast divergence of the orbits. A paradigmatic example: the Arnold cat.
 À È Ê ÇÄÁ Ë ËÌ ÅË Problem: A class of dynamical systems characterized by a fast divergence of the orbits A paradigmatic example: the Arnold cat. The closure of a homoclinic orbit. The shadowing lemma.
À È Ê ÇÄÁ Ë ËÌ ÅË Problem: A class of dynamical systems characterized by a fast divergence of the orbits A paradigmatic example: the Arnold cat. The closure of a homoclinic orbit. The shadowing lemma.
On the Structure of Hyperbolic Sets
 NORTHWESTERN UNIVERSITY On the Structure of Hyperbolic Sets A DISSERTATION SUBMITTED TO THE GRADUATE SCHOOL IN PARTIAL FULFILLMENT OF THE REQUIREMENTS for the degree DOCTOR OF PHILOSOPHY Field of Mathematics
NORTHWESTERN UNIVERSITY On the Structure of Hyperbolic Sets A DISSERTATION SUBMITTED TO THE GRADUATE SCHOOL IN PARTIAL FULFILLMENT OF THE REQUIREMENTS for the degree DOCTOR OF PHILOSOPHY Field of Mathematics
Smooth Structure. lies on the boundary, then it is determined up to the identifications it 1 2
 132 3. Smooth Structure lies on the boundary, then it is determined up to the identifications 1 2 + it 1 2 + it on the vertical boundary and z 1/z on the circular part. Notice that since z z + 1 and z
132 3. Smooth Structure lies on the boundary, then it is determined up to the identifications 1 2 + it 1 2 + it on the vertical boundary and z 1/z on the circular part. Notice that since z z + 1 and z
Dynamics of Group Actions and Minimal Sets
 University of Illinois at Chicago www.math.uic.edu/ hurder First Joint Meeting of the Sociedad de Matemática de Chile American Mathematical Society Special Session on Group Actions: Probability and Dynamics
University of Illinois at Chicago www.math.uic.edu/ hurder First Joint Meeting of the Sociedad de Matemática de Chile American Mathematical Society Special Session on Group Actions: Probability and Dynamics
Handout 2: Invariant Sets and Stability
 Engineering Tripos Part IIB Nonlinear Systems and Control Module 4F2 1 Invariant Sets Handout 2: Invariant Sets and Stability Consider again the autonomous dynamical system ẋ = f(x), x() = x (1) with state
Engineering Tripos Part IIB Nonlinear Systems and Control Module 4F2 1 Invariant Sets Handout 2: Invariant Sets and Stability Consider again the autonomous dynamical system ẋ = f(x), x() = x (1) with state
Problem Set Number 5, j/2.036j MIT (Fall 2014)
") Problem Set Number 5, 18.385j/2.036j MIT (Fall 2014) Rodolfo R. Rosales (MIT, Math. Dept.,Cambridge, MA 02139) Due Fri., October 24, 2014. October 17, 2014 1 Large µ limit for Liénard system #03 Statement:
Problem Set Number 5, 18.385j/2.036j MIT (Fall 2014) Rodolfo R. Rosales (MIT, Math. Dept.,Cambridge, MA 02139) Due Fri., October 24, 2014. October 17, 2014 1 Large µ limit for Liénard system #03 Statement:
27. Topological classification of complex linear foliations
 27. Topological classification of complex linear foliations 545 H. Find the expression of the corresponding element [Γ ε ] H 1 (L ε, Z) through [Γ 1 ε], [Γ 2 ε], [δ ε ]. Problem 26.24. Prove that for any
27. Topological classification of complex linear foliations 545 H. Find the expression of the corresponding element [Γ ε ] H 1 (L ε, Z) through [Γ 1 ε], [Γ 2 ε], [δ ε ]. Problem 26.24. Prove that for any
Elements of Applied Bifurcation Theory
 Yuri A. Kuznetsov Elements of Applied Bifurcation Theory Third Edition With 251 Illustrations Springer Introduction to Dynamical Systems 1 1.1 Definition of a dynamical system 1 1.1.1 State space 1 1.1.2
Yuri A. Kuznetsov Elements of Applied Bifurcation Theory Third Edition With 251 Illustrations Springer Introduction to Dynamical Systems 1 1.1 Definition of a dynamical system 1 1.1.1 State space 1 1.1.2
Symbolic dynamics and non-uniform hyperbolicity
 Symbolic dynamics and non-uniform hyperbolicity Yuri Lima UFC and Orsay June, 2017 Yuri Lima (UFC and Orsay) June, 2017 1 / 83 Lecture 1 Yuri Lima (UFC and Orsay) June, 2017 2 / 83 Part 1: Introduction
Symbolic dynamics and non-uniform hyperbolicity Yuri Lima UFC and Orsay June, 2017 Yuri Lima (UFC and Orsay) June, 2017 1 / 83 Lecture 1 Yuri Lima (UFC and Orsay) June, 2017 2 / 83 Part 1: Introduction
TOPOLOGICAL ENTROPY FOR DIFFERENTIABLE MAPS OF INTERVALS
 Chung, Y-.M. Osaka J. Math. 38 (200), 2 TOPOLOGICAL ENTROPY FOR DIFFERENTIABLE MAPS OF INTERVALS YONG MOO CHUNG (Received February 9, 998) Let Á be a compact interval of the real line. For a continuous
Chung, Y-.M. Osaka J. Math. 38 (200), 2 TOPOLOGICAL ENTROPY FOR DIFFERENTIABLE MAPS OF INTERVALS YONG MOO CHUNG (Received February 9, 998) Let Á be a compact interval of the real line. For a continuous
Invariant manifolds of the Bonhoeffer-van der Pol oscillator
 Invariant manifolds of the Bonhoeffer-van der Pol oscillator R. Benítez 1, V. J. Bolós 2 1 Dpto. Matemáticas, Centro Universitario de Plasencia, Universidad de Extremadura. Avda. Virgen del Puerto 2. 10600,
Invariant manifolds of the Bonhoeffer-van der Pol oscillator R. Benítez 1, V. J. Bolós 2 1 Dpto. Matemáticas, Centro Universitario de Plasencia, Universidad de Extremadura. Avda. Virgen del Puerto 2. 10600,
THE POINCARÉ RECURRENCE PROBLEM OF INVISCID INCOMPRESSIBLE FLUIDS
 ASIAN J. MATH. c 2009 International Press Vol. 13, No. 1, pp. 007 014, March 2009 002 THE POINCARÉ RECURRENCE PROBLEM OF INVISCID INCOMPRESSIBLE FLUIDS Y. CHARLES LI Abstract. Nadirashvili presented a
ASIAN J. MATH. c 2009 International Press Vol. 13, No. 1, pp. 007 014, March 2009 002 THE POINCARÉ RECURRENCE PROBLEM OF INVISCID INCOMPRESSIBLE FLUIDS Y. CHARLES LI Abstract. Nadirashvili presented a
ZEEMAN NUMBERS AND ORBIT SPLITTING IN FLOWS
 ZEEMAN NUMBERS AND ORBIT SPLITTING IN FLOWS MICHAEL C. SULLIVAN Abstract. The Zeeman number is an invariant of flow equivalence of suspensions of shifts of finite type. We prove that the Zeeman number
ZEEMAN NUMBERS AND ORBIT SPLITTING IN FLOWS MICHAEL C. SULLIVAN Abstract. The Zeeman number is an invariant of flow equivalence of suspensions of shifts of finite type. We prove that the Zeeman number
Problemas abiertos en dinámica de operadores
 Problemas abiertos en dinámica de operadores XIII Encuentro de la red de Análisis Funcional y Aplicaciones Cáceres, 6-11 de Marzo de 2017 Wikipedia Old version: In mathematics and physics, chaos theory
Problemas abiertos en dinámica de operadores XIII Encuentro de la red de Análisis Funcional y Aplicaciones Cáceres, 6-11 de Marzo de 2017 Wikipedia Old version: In mathematics and physics, chaos theory
SINAI S WORK ON MARKOV PARTITIONS AND SRB MEASURES
 SINAI S WORK ON MARKOV PARTITIONS AND SRB MEASURES YAKOV PESIN Abstract. Some principal contributions of Ya. Sinai to hyperbolic theory of dynamical systems focused mainly constructions of Markov partitions
SINAI S WORK ON MARKOV PARTITIONS AND SRB MEASURES YAKOV PESIN Abstract. Some principal contributions of Ya. Sinai to hyperbolic theory of dynamical systems focused mainly constructions of Markov partitions
A Study of the Van der Pol Equation
 A Study of the Van der Pol Equation Kai Zhe Tan, s1465711 September 16, 2016 Abstract The Van der Pol equation is famous for modelling biological systems as well as being a good model to study its multiple
A Study of the Van der Pol Equation Kai Zhe Tan, s1465711 September 16, 2016 Abstract The Van der Pol equation is famous for modelling biological systems as well as being a good model to study its multiple
Universidade Técnica de Lisboa, Rua do Quelhas 6, Lisboa, Portugal
 Chaos in the square billiard with a modified reflection law Gianluigi Del Magno, 1, a) João Lopes Dias, 2, b) Pedro Duarte, 3, c) 1, d) José Pedro Gaivão, 1, e) and Diogo Pinheiro 1) CEMAPRE, ISEG, Universidade
Chaos in the square billiard with a modified reflection law Gianluigi Del Magno, 1, a) João Lopes Dias, 2, b) Pedro Duarte, 3, c) 1, d) José Pedro Gaivão, 1, e) and Diogo Pinheiro 1) CEMAPRE, ISEG, Universidade
Hyperbolic chaotic attractor in amplitude dynamics of coupled self-oscillators with periodic parameter modulation
 PHYSICAL REVIEW E 84, 068 (0) Hyperbolic chaotic attractor in amplitude dynamics of coupled self-oscillators with periodic parameter modulation Olga B. Isaeva, Sergey P. Kuznetsov, and Erik Mosekilde Kotel
PHYSICAL REVIEW E 84, 068 (0) Hyperbolic chaotic attractor in amplitude dynamics of coupled self-oscillators with periodic parameter modulation Olga B. Isaeva, Sergey P. Kuznetsov, and Erik Mosekilde Kotel
LMI Methods in Optimal and Robust Control
 LMI Methods in Optimal and Robust Control Matthew M. Peet Arizona State University Lecture 15: Nonlinear Systems and Lyapunov Functions Overview Our next goal is to extend LMI s and optimization to nonlinear
LMI Methods in Optimal and Robust Control Matthew M. Peet Arizona State University Lecture 15: Nonlinear Systems and Lyapunov Functions Overview Our next goal is to extend LMI s and optimization to nonlinear
Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients. Takayuki Yamaguchi
 Hokkaido Mathematical Journal Vol. 44 (2015) p. 277 312 Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients Takayuki Yamaguchi (Received March 13,
Hokkaido Mathematical Journal Vol. 44 (2015) p. 277 312 Finding numerically Newhouse sinks near a homoclinic tangency and investigation of their chaotic transients Takayuki Yamaguchi (Received March 13,
A FRANKS LEMMA FOR CONVEX PLANAR BILLIARDS
 A FRANKS LEMMA FOR CONVEX PLANAR BILLIARDS DANIEL VISSCHER Abstract Let γ be an orbit of the billiard flow on a convex planar billiard table; then the perpendicular part of the derivative of the billiard
A FRANKS LEMMA FOR CONVEX PLANAR BILLIARDS DANIEL VISSCHER Abstract Let γ be an orbit of the billiard flow on a convex planar billiard table; then the perpendicular part of the derivative of the billiard
Physical measures of discretizations of generic diffeomorphisms
 Ergod. Th. & Dynam. Sys. (2018), 38, 1422 1458 doi:10.1017/etds.2016.70 c Cambridge University Press, 2016 Physical measures of discretizations of generic diffeomorphisms PIERRE-ANTOINE GUIHÉNEUF Université
Ergod. Th. & Dynam. Sys. (2018), 38, 1422 1458 doi:10.1017/etds.2016.70 c Cambridge University Press, 2016 Physical measures of discretizations of generic diffeomorphisms PIERRE-ANTOINE GUIHÉNEUF Université
ẋ = f(x, y), ẏ = g(x, y), (x, y) D, can only have periodic solutions if (f,g) changes sign in D or if (f,g)=0in D.
, ẏ = g(x, y), (x, y) D, can only have periodic solutions if (f,g) changes sign in D or if (f,g)=0in D.") 4 Periodic Solutions We have shown that in the case of an autonomous equation the periodic solutions correspond with closed orbits in phase-space. Autonomous two-dimensional systems with phase-space R
4 Periodic Solutions We have shown that in the case of an autonomous equation the periodic solutions correspond with closed orbits in phase-space. Autonomous two-dimensional systems with phase-space R
MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation.
 MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation. Bifurcation theory The object of bifurcation theory is to study changes that maps undergo
MATH 614 Dynamical Systems and Chaos Lecture 24: Bifurcation theory in higher dimensions. The Hopf bifurcation. Bifurcation theory The object of bifurcation theory is to study changes that maps undergo
THREE DIMENSIONAL SYSTEMS. Lecture 6: The Lorenz Equations
 THREE DIMENSIONAL SYSTEMS Lecture 6: The Lorenz Equations 6. The Lorenz (1963) Equations The Lorenz equations were originally derived by Saltzman (1962) as a minimalist model of thermal convection in a
THREE DIMENSIONAL SYSTEMS Lecture 6: The Lorenz Equations 6. The Lorenz (1963) Equations The Lorenz equations were originally derived by Saltzman (1962) as a minimalist model of thermal convection in a
LECTURE 8: DYNAMICAL SYSTEMS 7
 15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
15-382 COLLECTIVE INTELLIGENCE S18 LECTURE 8: DYNAMICAL SYSTEMS 7 INSTRUCTOR: GIANNI A. DI CARO GEOMETRIES IN THE PHASE SPACE Damped pendulum One cp in the region between two separatrix Separatrix Basin
arxiv: v1 [nlin.cd] 20 Jul 2010
![arxiv: v1 [nlin.cd] 20 Jul 2010](/thumbs/92/109497388.jpg "arxiv: v1 [nlin.cd] 20 Jul 2010") Invariant manifolds of the Bonhoeffer-van der Pol oscillator arxiv:1007.3375v1 [nlin.cd] 20 Jul 2010 R. Benítez 1, V. J. Bolós 2 1 Departamento de Matemáticas, Centro Universitario de Plasencia, Universidad
Invariant manifolds of the Bonhoeffer-van der Pol oscillator arxiv:1007.3375v1 [nlin.cd] 20 Jul 2010 R. Benítez 1, V. J. Bolós 2 1 Departamento de Matemáticas, Centro Universitario de Plasencia, Universidad
Lyapunov Stability Theory
 Lyapunov Stability Theory Peter Al Hokayem and Eduardo Gallestey March 16, 2015 1 Introduction In this lecture we consider the stability of equilibrium points of autonomous nonlinear systems, both in continuous
Lyapunov Stability Theory Peter Al Hokayem and Eduardo Gallestey March 16, 2015 1 Introduction In this lecture we consider the stability of equilibrium points of autonomous nonlinear systems, both in continuous
One Dimensional Dynamical Systems
 16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
16 CHAPTER 2 One Dimensional Dynamical Systems We begin by analyzing some dynamical systems with one-dimensional phase spaces, and in particular their bifurcations. All equations in this Chapter are scalar
C 1 DENSITY OF AXIOM A FOR 1D DYNAMICS
 C 1 DENSITY OF AXIOM A FOR 1D DYNAMICS DAVID DIICA Abstract. We outline a proof of the C 1 unimodal maps of the interval. density of Axiom A systems among the set of 1. Introduction The amazing theory
C 1 DENSITY OF AXIOM A FOR 1D DYNAMICS DAVID DIICA Abstract. We outline a proof of the C 1 unimodal maps of the interval. density of Axiom A systems among the set of 1. Introduction The amazing theory
Lorenz like flows. Maria José Pacifico. IM-UFRJ Rio de Janeiro - Brasil. Lorenz like flows p. 1
 Lorenz like flows Maria José Pacifico pacifico@im.ufrj.br IM-UFRJ Rio de Janeiro - Brasil Lorenz like flows p. 1 Main goals The main goal is to explain the results (Galatolo-P) Theorem A. (decay of correlation
Lorenz like flows Maria José Pacifico pacifico@im.ufrj.br IM-UFRJ Rio de Janeiro - Brasil Lorenz like flows p. 1 Main goals The main goal is to explain the results (Galatolo-P) Theorem A. (decay of correlation
Fundamentals of Dynamical Systems / Discrete-Time Models. Dr. Dylan McNamara people.uncw.edu/ mcnamarad
 Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian
Fundamentals of Dynamical Systems / Discrete-Time Models Dr. Dylan McNamara people.uncw.edu/ mcnamarad Dynamical systems theory Considers how systems autonomously change along time Ranges from Newtonian