Space-Variant Computer Vision: A Graph Theoretic Approach
|
|
|
- Chastity Johns
- 6 years ago
- Views:
Transcription
1 p.1/65 Space-Variant Computer Vision: A Graph Theoretic Approach Leo Grady Cognitive and Neural Systems Boston University
2 p.2/65 Outline of talk Space-variant vision - Why and how of graph theory Anisotropic interpolation Isoperimetric segmentation Topology and numerical efficiency Multiresolution segmentation Conclusion - Future work
3 p.3/65 Biological visual sampling Why has evolution driven this process? (Hughes, 1977)
4 Biological visual sampling Visual archetecture satisfies the needs of the system p.4/65
5 p.5/65 Biological visual sampling The Terrain Theory of Hughes (1977) (a) Tree Kangaroo (b) Ground Kangaroo

 4-Connected (b) 8-Connected (c)")
6 p.6/65 Biological visual sampling Problem: How to apply computer vision techniques to space-variant images? (a) 4-Connected (b) 8-Connected (c) Kangaroo
")
7 p.7/65 Biological visual sampling Approach: Graph theory Nodes correspond to pixels and node density corresponds to resolution Naturally extends to 3D or data clustering Applies to any field defined on nodes (e.g., image intensity, coordinates)
8 p.8/65 Advantages of graph theory Why should we be interested in graph-theoretic approaches to vision? Recent success using graph theory in computer vision Global-local interactions Dimension independent Analogies between graphs, matrices, vector calculus and circuit theory allows transfer of ideas and intuition
9 p.9/65 Graph theory How to use concepts from calculus on a graph? A graph is a pair G = (V, E) with vertices (nodes) v V and edges e E V V. An edge, e, spanning two vertices, v i and v j, is denoted by e ij. A weighted graph has a value (typically nonnegative and real) assigned to each edge, e ij, denoted by w(e ij ) or w ij. A eij v k = C eij e ks = +1 if i = k, 1 if j = k, 0 otherwise. w(e ij ) if i = k, j = s, 0 otherwise. d i L vi v j = w(e ij ) if i=j, if e ij E, 0 otherwise. d i = e w(e ij ) e ij E ij L=A T CA
10 p.10/65 Graph theory - Circuit analogy A T y = f Cp = y p = Ax Kirchhoff s Current Law Ohm s Law Kirchhoff s Voltage Law


")
11 p.11/65 Graph theory Allows straightforward translation of computer vision concepts (a) Structure (b) Image (c) Edge-detection
12 p.12/65 Outline of talk Space-variant vision - Why and how of graph theory Anisotropic interpolation Isoperimetric segmentation Topology and numerical efficiency Multiresolution segmentation Conclusion - Future work
13 Graph interpolation Problem: How to interpolate unknown nodal values between known nodal values? Answer: Solve the combinatorial Dirichlet Problem using Dirichlet boundary conditions at the known values (a) Graph (b) Circuit p.13/65
14 The Dirichlet Problem Continuous Dirichlet integral D[u] = 1 2 Ω u 2 dv Laplace equation 2 u = 0 Combinatorial Dirichlet integral D[x] = 1 2 xt A T CAx Laplace equation A T CAx = Lx = 0 p.14/65
15 p.15/65 Dirichlet Problem How are the boundary conditions actually incorporated? D[x] = 1 2 xt Lx D[x i ] = 1 2 [ x T b x T i ] [ ] [ ] L b R xb R T L i x i = x T b L b x b + 2x T i R T x b + x T i L i x i L i x i = R T x b


16 Does it work? p.16/65
17 p.17/65 Dirichlet Problem - So what? Connection with anisotropic diffusion (Perona and Malik, 1990) suggests use for early vision processing Diffusion equation dx dt = Lx Laplace equation 0 = Lx


")
18 p.18/65 Dirichlet Problem Anisotropic Laplacian smoothing (a) Original (b) Samples (c) Interpolation



19 Space-variant sampling p.19/65
20 p.20/65 Laplace vs. Diffusion Conclusion Steady state vs. transient Diffusion requires stopping parameter (i.e., time) Sampling of Laplace allows more or less smoothing in different regions
21 p.21/65 Outline of talk Space-variant vision - Why and how of graph theory Anisotropic interpolation Isoperimetric segmentation Topology and numerical efficiency Multiresolution segmentation Conclusion - Future work
22 Isoperimetric Problem Problem: For a given volume, what shape has the smallest perimeter? Enclosing a volume with a boundary may be considered as a separation of the space. Segmentation: View image as a discrete geometry where the image values specify the metric and find the partitions that satisfy the isoperimetric problem. p.22/65
23 p.23/65 Isoperimetric Problem For an arbitrary space, the problem is much more difficult. Formally, the isoperimetric constant for a space is given as S h = inf, S Vol S for any subset of points, S.
24 p.24/65 Isoperimetric Problem How to define problem for a discrete geometry (graph)? Instead of points, S is a set of nodes. S = {4, 5} S = {1, 2, 3} S = {d, e}
25 p.25/65 Graph formulation Define an indicator vector x i = { 0 if vi / S, 1 if v i S. Note that specification of x defines a partition. How to define perimeter? S = x T Lx
26 p.26/65 Graph formulation How to define volume? Nodal Volume Normalized Volume Vol S = x T r Vol S = x T d Where r is the vector of all ones and d is the vector of node degree.
27 p.27/65 Graph formulation As a measure of partition quality, define the isoperimetric ratio as h(x) = xt Lx x T d. Strategy: Relax x to take real values and use Lagrange multiplier to perform a constrained minimization of the perimeter with respect to a constant volume. Namely, minimize x T Lx subject to the constraint x T d = k.
28 p.28/65 Graph formulation Define the function Q(x) as Q(x) = x T Lx Λ(x T d k). Since L is positive semi-definite (Biggs, 1974), Q(x) takes minima at critical points satisfying 2Lx = Λd. Problem: Equation is singular - For a connected graph, L has a nullspace spanned by r.
29 p.29/65 Circuit analogy Same equation occurs in circuit theory (Branin Jr., 1966) for a resistive network powered by current sources. Must ground the circuit in order to find potentials. Lx = d L 0 x 0 = d 0



30 Potentials When L 0 x 0 = d 0 is solved, a set of potentials is assigned to each node that must be thresholded in order to produce a partition. Lemma: For any threshold, the set of nodes with potentials lower than the threshold must be connected. Proof: Follows from the mean value theorem with positive sources. p.30/65
31 p.31/65 Partitioning algorithm recap Steps of the partitioning algorithm 1 Generate edge weights based on image/coordinate/sensor data. 2 Choose a ground node, v g, and form L 0, d 0. 3 Solve L 0 x 0 = d 0 for x 0. 4 Choose threshold and divide nodes into the sets with potentials above and below the threshold.
32 p.32/65 Spectral partitioning Spectral vs. Isoperimetric Eigenvector problem vs. system of linear equations If eigenvalue algebraic multiplicity is greater than unity: Any vector in the subspace spanned by the eigenvectors is a valid solution.

33 p.33/65 Data clustering The Gestalt clustering challenges of Zahn


34 p.34/65 Image processing Why should this work well? Image Potentials Segmentation



35 p.35/65 Image processing What is the effect of choosing ground?
 We term β the scale (a) β = 30")
36 Image processing How to choose weights? w ij = exp ( β I i I j ) We term β the scale (a) β = 30 (b) β = 50 p.36/65
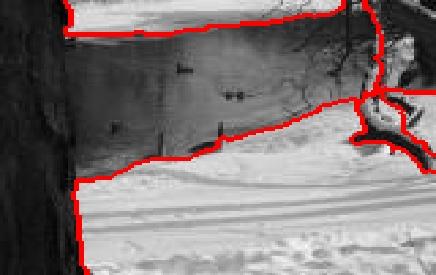
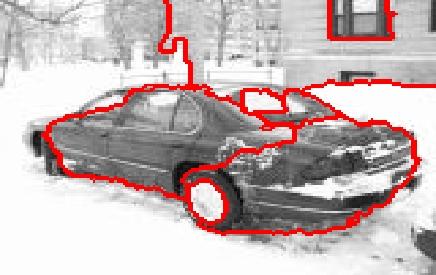
37 p.37/65 Recursive bipartitioning How to apply isoperimetric partitioning to (unsupervised) image segmentation? Recursively apply bipartitioning until the isoperimetric ratio of the cut (i.e., the partition quality) fails to satisfy a pre-specified isoperimetric ratio.
38 p.38/65 Recursive bipartitioning No user interaction - How to automatically choose ground? Anderson and Morley (1971) proved that the spectral radius of L, ρ(l), satisfies ρ(l) 2d max. Therefore, grounding the node of highest degree may have the most beneficial affect on the numerical solution to L 0 x 0 = d 0.





39 Recursive bipartitioning p.39/65
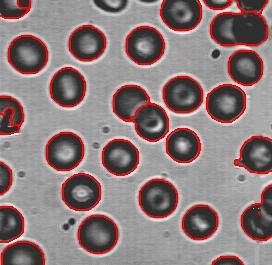
40 Noise analysis Segmentation of white circle on black background (a) Additive (b) Multiplicative (c) Shot p.40/65

 Additive")
 Shot p.41/65")
41 Noise analysis Noise Image Iso Ncuts Image Iso Ncuts Image Iso Ncuts (a) Additive (b) Multiplicative (c) Shot p.41/65


42 p.42/65 Other graphs Because of the flexibility of graph theory, the isoperimetric segmentation algorithm applies to general graphs. (a) 3D graph (b) Space-variant
43 p.43/65 Outline of talk Space-variant vision - Why and how of graph theory Anisotropic interpolation Isoperimetric segmentation Topology and numerical efficiency Multiresolution segmentation Conclusion - Future work
44 p.44/65 Krylov subspaces Krylov subspace methods are the methods of choice for solving both the system of linear equations (conjugate gradients) and the eigenvector problem (Lanczos method). K(A; x 0 ; k) = span(x 0, Ax 0, A 2 x 0,..., A (k 1) x 0 ) The solution found at each iteration, i, of conjugate gradients is the solution to Ax = b projected onto the Krylov subspace K(A, Ax 0 b, i) (Dongarra et al., 1991).
45 p.45/65 Krylov subspaces K(A; x 0 ; k) = span(x 0, Ax 0, A 2 x 0,..., A (k 1) x 0 ) Connection with diffusion x i+1 = x i + tlx i Convergence is directly related to graph diameter.


46 Krylov subspaces Idea: Use small world graphs to dramatically lower graph diameter with the addition of a minimal number of edges. (a) Lattice (b) Small world p.46/65
47 p.47/65 Krylov subspaces Convergence with new edges added
48 p.48/65 Krylov subspaces Results are largely unaffected. (a) Original (b) Lattice (c) Small World
49 p.49/65 Outline of talk Space-variant vision - Why and how of graph theory Anisotropic interpolation Isoperimetric segmentation Topology and numerical efficiency Multiresolution segmentation Conclusion - Future work
50 p.50/65 Multiresolution analysis Common approach: Image Filter Process Backproject solution Used for speed and resilience to noise
51 p.51/65 Multiresolution analysis Idea: Apply a graph-based analysis algorithm to the whole pyramid as a separate graph.

52 p.52/65 Multiresolution analysis Long range connections improve performance on blurry images Blur Image Lattice Pyramid




53 Multiresolution segmentation p.53/65
54 p.54/65 Multiresolution analysis Doesn t the speed suffer with the additional nodes? Computations nearly the same since the graph diameter is small.
55 p.55/65 Outline of talk Space-variant vision - Why and how of graph theory Anisotropic interpolation Isoperimetric segmentation Topology and numerical efficiency Multiresolution segmentation Conclusion - Future work
56 Conclusion Created Graph Analysis Toolbox for MATLAB to be publicly released: Implementation of tools to allow processing of data associated with graphs (e.g., filtering, edge detection, Ncuts) Implementation of new algorithms developed in my doctoral work Provides tools for transferring image data from Cartesian images to graphs of varying resolution Provides tools for visualizing data on graphs Includes space-variant graph data for over 20 species Has scripts to generate all the figures in my dissertation and papers p.56/65
57 p.57/65 Conclusion Final message: The analogy between graph theory, circuit theory, linear algebra and vector calculus provides Established principles that drive new algorithm design - with an intuition about their functionality An ability to transfer standard computer vision techniques to more general domains e.g., space-variant sensor data, higher dimensions, abstract feature spaces The potential for alternate methods of computation via circuit construction
58 p.58/65 Future directions General directions Use of nodes to represent image regions instead of pixels Incorporation of training/learning into image analysis algorithms Pursue interactive foreground/background segmentation Object recognition Explore relationship with statistical image analysis methods
 frames standard filtering in the same context (a) Image (b)")
59 p.59/65 Graph theory Taubin et al. (1996) frames standard filtering in the same context (a) Image (b) Low-pass filter (c) High-pass filter
60 p.60/65 Graph theory Coordinate filtering also possible (e.g., a ring graph) (a) Original (b) Low-pass filter (c) High-pass filter
61 p.61/65 Dirichlet Problem Same technique works for simple graph drawing (a) Original (b) Interpolated


62 p.62/65 Isoperimetric Problem The isoperimetric constant quantifies the separability of a space
63 Spectral partitioning Spectral partitioning (Donath and Hoffman, 1972; Pothen et al., 1990) adopts a different approach to minimizing the isoperimetric ratio. Isoperimetric ratio h(x) = xt Lx x T d Rayleigh quotient R(x) = xt Lx x T x Results by Fiedler (1975a,b, 1973), Alon (1986) and Cheeger (1970) characterize the relationship between isoperimetric constant of a graph and the second smallest eigenvector of L (the Fiedler value). The Normalized Cuts image segmentation algorithm of Shi and Malik (2000) adopts this approach with a different representation of the Laplacian matrix. p.63/65
64 p.64/65 Spectral partitioning Guattery and Miller (1998) demonstrated that spectral partitioning fails to perform well on certain families of graphs (a) Spectral (b) Isoperimetric

 Potentials")
65 p.65/65 Image processing No edge information present - The Kaniza illusion (a) Potentials (b) Partition
66 References Alon, N. (1986). Eigenvalues and expanders. Combinatorica, 6: Anderson, W. N. J. and Morley, T. D. (1971). Eigenvalues of the laplacian of a graph. Technical Report TR 71-45, University of Maryland. Biggs, N. (1974). Algebraic Graph Theory. Number 67 in Cambridge Tracts in Mathematics. Cambridge University Press. Branin Jr., F. H. (1966). The algebraic-topological basis for network analogies and the vector calculus. In Generalized Networks, Proceedings, pages , Brooklyn, N.Y. Cheeger, J. (1970). A lower bound for the smallest eigenvalue of the laplacian. In Gunning, R., editor, Problems in Analysis, pages Princeton University Press, Princeton, NJ. Donath, W. and Hoffman, A. (1972). Algorithms for partitioning of graphs and computer logic based on eigenvectors of connection matrices. IBM Technical Disclosure Bulletin, 15:
67 Dongarra, J. J., Duff, I. S., Sorenson, D. C., and van der Vorst, H. A. (1991). Solving Linear Systems on Vector and Shared Memory Computers. Society for Industrial and Applied Mathematics, Philadelphia. Fiedler, M. (1973). Algebraic connectivity of graphs. Czechoslovak Mathematical Journal, 23(98): Fiedler, M. (1975a). Eigenvalues of acyclic matrices. Czechoslovak Mathematical Journal, 25(100): Fiedler, M. (1975b). A property of eigenvalues of nonnegative symmetric matrices and its applications to graph theory. Czechoslovak Mathematical Journal, 25(100): Guattery, S. and Miller, G. (1998). On the quality of spectral separators. SIAM Journal on Matrix Analysis and Applications, 19(3): Hughes, A. (1977). The topography of vision in mammals of contrasting life style: Comparative optics and retinal organization. In The Handbook of Sensory Physiology, volume 7. New York: Academic Press. Perona, P. and Malik, J. (1990). Scale-space and edge detection using anisotropic diffusion. IEEE Transac- 65-2
68 tions on Pattern Analysis and Machine Intelligence, 12(7): Pothen, A., Simon, H., and Liou, K.-P. (1990). Partitioning sparse matrices with eigenvectors of graphs. SIAM Journal of Matrix Analysis Applications, 11(3): Shi, J. and Malik, J. (2000). Normalized cuts and image segmentation. IEEE Transactions on Pattern Analysis and Machine Intelligence, 22(8): Taubin, G., Zhang, T., and Golub, G. (1996). Optimal surface smoothing as filter design. Technical Report RC-20404, IBM. 65-3
Random walks and anisotropic interpolation on graphs. Filip Malmberg
 Random walks and anisotropic interpolation on graphs. Filip Malmberg Interpolation of missing data Assume that we have a graph where we have defined some (real) values for a subset of the nodes, and that
Random walks and anisotropic interpolation on graphs. Filip Malmberg Interpolation of missing data Assume that we have a graph where we have defined some (real) values for a subset of the nodes, and that
Spectral Clustering on Handwritten Digits Database
 University of Maryland-College Park Advance Scientific Computing I,II Spectral Clustering on Handwritten Digits Database Author: Danielle Middlebrooks Dmiddle1@math.umd.edu Second year AMSC Student Advisor:
University of Maryland-College Park Advance Scientific Computing I,II Spectral Clustering on Handwritten Digits Database Author: Danielle Middlebrooks Dmiddle1@math.umd.edu Second year AMSC Student Advisor:
Markov Chains and Spectral Clustering
 Markov Chains and Spectral Clustering Ning Liu 1,2 and William J. Stewart 1,3 1 Department of Computer Science North Carolina State University, Raleigh, NC 27695-8206, USA. 2 nliu@ncsu.edu, 3 billy@ncsu.edu
Markov Chains and Spectral Clustering Ning Liu 1,2 and William J. Stewart 1,3 1 Department of Computer Science North Carolina State University, Raleigh, NC 27695-8206, USA. 2 nliu@ncsu.edu, 3 billy@ncsu.edu
ECS231: Spectral Partitioning. Based on Berkeley s CS267 lecture on graph partition
 ECS231: Spectral Partitioning Based on Berkeley s CS267 lecture on graph partition 1 Definition of graph partitioning Given a graph G = (N, E, W N, W E ) N = nodes (or vertices), E = edges W N = node weights
ECS231: Spectral Partitioning Based on Berkeley s CS267 lecture on graph partition 1 Definition of graph partitioning Given a graph G = (N, E, W N, W E ) N = nodes (or vertices), E = edges W N = node weights
Lecture 12: Introduction to Spectral Graph Theory, Cheeger s inequality
 CSE 521: Design and Analysis of Algorithms I Spring 2016 Lecture 12: Introduction to Spectral Graph Theory, Cheeger s inequality Lecturer: Shayan Oveis Gharan May 4th Scribe: Gabriel Cadamuro Disclaimer:
CSE 521: Design and Analysis of Algorithms I Spring 2016 Lecture 12: Introduction to Spectral Graph Theory, Cheeger s inequality Lecturer: Shayan Oveis Gharan May 4th Scribe: Gabriel Cadamuro Disclaimer:
Spectral Clustering. Spectral Clustering? Two Moons Data. Spectral Clustering Algorithm: Bipartioning. Spectral methods
 Spectral Clustering Seungjin Choi Department of Computer Science POSTECH, Korea seungjin@postech.ac.kr 1 Spectral methods Spectral Clustering? Methods using eigenvectors of some matrices Involve eigen-decomposition
Spectral Clustering Seungjin Choi Department of Computer Science POSTECH, Korea seungjin@postech.ac.kr 1 Spectral methods Spectral Clustering? Methods using eigenvectors of some matrices Involve eigen-decomposition
Iterative methods for symmetric eigenvalue problems
 s Iterative s for symmetric eigenvalue problems, PhD McMaster University School of Computational Engineering and Science February 11, 2008 s 1 The power and its variants Inverse power Rayleigh quotient
s Iterative s for symmetric eigenvalue problems, PhD McMaster University School of Computational Engineering and Science February 11, 2008 s 1 The power and its variants Inverse power Rayleigh quotient
CS 556: Computer Vision. Lecture 13
 CS 556: Computer Vision Lecture 1 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Outline Perceptual grouping Low-level segmentation Ncuts Perceptual Grouping What do you see? 4 What do you see? Rorschach
CS 556: Computer Vision Lecture 1 Prof. Sinisa Todorovic sinisa@eecs.oregonstate.edu 1 Outline Perceptual grouping Low-level segmentation Ncuts Perceptual Grouping What do you see? 4 What do you see? Rorschach
CSE 291. Assignment Spectral clustering versus k-means. Out: Wed May 23 Due: Wed Jun 13
 CSE 291. Assignment 3 Out: Wed May 23 Due: Wed Jun 13 3.1 Spectral clustering versus k-means Download the rings data set for this problem from the course web site. The data is stored in MATLAB format as
CSE 291. Assignment 3 Out: Wed May 23 Due: Wed Jun 13 3.1 Spectral clustering versus k-means Download the rings data set for this problem from the course web site. The data is stored in MATLAB format as
Graphs, Vectors, and Matrices Daniel A. Spielman Yale University. AMS Josiah Willard Gibbs Lecture January 6, 2016
 Graphs, Vectors, and Matrices Daniel A. Spielman Yale University AMS Josiah Willard Gibbs Lecture January 6, 2016 From Applied to Pure Mathematics Algebraic and Spectral Graph Theory Sparsification: approximating
Graphs, Vectors, and Matrices Daniel A. Spielman Yale University AMS Josiah Willard Gibbs Lecture January 6, 2016 From Applied to Pure Mathematics Algebraic and Spectral Graph Theory Sparsification: approximating
Image enhancement. Why image enhancement? Why image enhancement? Why image enhancement? Example of artifacts caused by image encoding
 13 Why image enhancement? Image enhancement Example of artifacts caused by image encoding Computer Vision, Lecture 14 Michael Felsberg Computer Vision Laboratory Department of Electrical Engineering 12
13 Why image enhancement? Image enhancement Example of artifacts caused by image encoding Computer Vision, Lecture 14 Michael Felsberg Computer Vision Laboratory Department of Electrical Engineering 12
Spectral and Electrical Graph Theory. Daniel A. Spielman Dept. of Computer Science Program in Applied Mathematics Yale Unviersity
 Spectral and Electrical Graph Theory Daniel A. Spielman Dept. of Computer Science Program in Applied Mathematics Yale Unviersity Outline Spectral Graph Theory: Understand graphs through eigenvectors and
Spectral and Electrical Graph Theory Daniel A. Spielman Dept. of Computer Science Program in Applied Mathematics Yale Unviersity Outline Spectral Graph Theory: Understand graphs through eigenvectors and
1 Matrix notation and preliminaries from spectral graph theory
 Graph clustering (or community detection or graph partitioning) is one of the most studied problems in network analysis. One reason for this is that there are a variety of ways to define a cluster or community.
Graph clustering (or community detection or graph partitioning) is one of the most studied problems in network analysis. One reason for this is that there are a variety of ways to define a cluster or community.
Graphs in Machine Learning
 Graphs in Machine Learning Michal Valko INRIA Lille - Nord Europe, France Partially based on material by: Ulrike von Luxburg, Gary Miller, Doyle & Schnell, Daniel Spielman January 27, 2015 MVA 2014/2015
Graphs in Machine Learning Michal Valko INRIA Lille - Nord Europe, France Partially based on material by: Ulrike von Luxburg, Gary Miller, Doyle & Schnell, Daniel Spielman January 27, 2015 MVA 2014/2015
Introduction to Spectral Graph Theory and Graph Clustering
 Introduction to Spectral Graph Theory and Graph Clustering Chengming Jiang ECS 231 Spring 2016 University of California, Davis 1 / 40 Motivation Image partitioning in computer vision 2 / 40 Motivation
Introduction to Spectral Graph Theory and Graph Clustering Chengming Jiang ECS 231 Spring 2016 University of California, Davis 1 / 40 Motivation Image partitioning in computer vision 2 / 40 Motivation
Conjugate gradient acceleration of non-linear smoothing filters
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Conjugate gradient acceleration of non-linear smoothing filters Knyazev, A.; Malyshev, A. TR25-43 December 25 Abstract The most efficient edge-preserving
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Conjugate gradient acceleration of non-linear smoothing filters Knyazev, A.; Malyshev, A. TR25-43 December 25 Abstract The most efficient edge-preserving
Spectral Clustering. Zitao Liu
 Spectral Clustering Zitao Liu Agenda Brief Clustering Review Similarity Graph Graph Laplacian Spectral Clustering Algorithm Graph Cut Point of View Random Walk Point of View Perturbation Theory Point of
Spectral Clustering Zitao Liu Agenda Brief Clustering Review Similarity Graph Graph Laplacian Spectral Clustering Algorithm Graph Cut Point of View Random Walk Point of View Perturbation Theory Point of
ON THE QUALITY OF SPECTRAL SEPARATORS
 ON THE QUALITY OF SPECTRAL SEPARATORS STEPHEN GUATTERY AND GARY L. MILLER Abstract. Computing graph separators is an important step in many graph algorithms. A popular technique for finding separators
ON THE QUALITY OF SPECTRAL SEPARATORS STEPHEN GUATTERY AND GARY L. MILLER Abstract. Computing graph separators is an important step in many graph algorithms. A popular technique for finding separators
Laplacian Matrices of Graphs: Spectral and Electrical Theory
 Laplacian Matrices of Graphs: Spectral and Electrical Theory Daniel A. Spielman Dept. of Computer Science Program in Applied Mathematics Yale University Toronto, Sep. 28, 2 Outline Introduction to graphs
Laplacian Matrices of Graphs: Spectral and Electrical Theory Daniel A. Spielman Dept. of Computer Science Program in Applied Mathematics Yale University Toronto, Sep. 28, 2 Outline Introduction to graphs
Numerical Methods - Numerical Linear Algebra
 Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Numerical Methods - Numerical Linear Algebra Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Numerical Linear Algebra I 2013 1 / 62 Outline 1 Motivation 2 Solving Linear
Spectral Graph Theory and its Applications. Daniel A. Spielman Dept. of Computer Science Program in Applied Mathematics Yale Unviersity
 Spectral Graph Theory and its Applications Daniel A. Spielman Dept. of Computer Science Program in Applied Mathematics Yale Unviersity Outline Adjacency matrix and Laplacian Intuition, spectral graph drawing
Spectral Graph Theory and its Applications Daniel A. Spielman Dept. of Computer Science Program in Applied Mathematics Yale Unviersity Outline Adjacency matrix and Laplacian Intuition, spectral graph drawing
EIGIFP: A MATLAB Program for Solving Large Symmetric Generalized Eigenvalue Problems
 EIGIFP: A MATLAB Program for Solving Large Symmetric Generalized Eigenvalue Problems JAMES H. MONEY and QIANG YE UNIVERSITY OF KENTUCKY eigifp is a MATLAB program for computing a few extreme eigenvalues
EIGIFP: A MATLAB Program for Solving Large Symmetric Generalized Eigenvalue Problems JAMES H. MONEY and QIANG YE UNIVERSITY OF KENTUCKY eigifp is a MATLAB program for computing a few extreme eigenvalues
Is there life after the Lanczos method? What is LOBPCG?
 1 Is there life after the Lanczos method? What is LOBPCG? Andrew V. Knyazev Department of Mathematics and Center for Computational Mathematics University of Colorado at Denver SIAM ALA Meeting, July 17,
1 Is there life after the Lanczos method? What is LOBPCG? Andrew V. Knyazev Department of Mathematics and Center for Computational Mathematics University of Colorado at Denver SIAM ALA Meeting, July 17,
Solving Constrained Rayleigh Quotient Optimization Problem by Projected QEP Method
 Solving Constrained Rayleigh Quotient Optimization Problem by Projected QEP Method Yunshen Zhou Advisor: Prof. Zhaojun Bai University of California, Davis yszhou@math.ucdavis.edu June 15, 2017 Yunshen
Solving Constrained Rayleigh Quotient Optimization Problem by Projected QEP Method Yunshen Zhou Advisor: Prof. Zhaojun Bai University of California, Davis yszhou@math.ucdavis.edu June 15, 2017 Yunshen
Iterative Methods for Solving A x = b
 Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Iterative Methods for Solving A x = b A good (free) online source for iterative methods for solving A x = b is given in the description of a set of iterative solvers called templates found at netlib: http
Math 307 Learning Goals. March 23, 2010
 Math 307 Learning Goals March 23, 2010 Course Description The course presents core concepts of linear algebra by focusing on applications in Science and Engineering. Examples of applications from recent
Math 307 Learning Goals March 23, 2010 Course Description The course presents core concepts of linear algebra by focusing on applications in Science and Engineering. Examples of applications from recent
Graph Partitioning Algorithms and Laplacian Eigenvalues
 Graph Partitioning Algorithms and Laplacian Eigenvalues Luca Trevisan Stanford Based on work with Tsz Chiu Kwok, Lap Chi Lau, James Lee, Yin Tat Lee, and Shayan Oveis Gharan spectral graph theory Use linear
Graph Partitioning Algorithms and Laplacian Eigenvalues Luca Trevisan Stanford Based on work with Tsz Chiu Kwok, Lap Chi Lau, James Lee, Yin Tat Lee, and Shayan Oveis Gharan spectral graph theory Use linear
Linear algebra and applications to graphs Part 1
 Linear algebra and applications to graphs Part 1 Written up by Mikhail Belkin and Moon Duchin Instructor: Laszlo Babai June 17, 2001 1 Basic Linear Algebra Exercise 1.1 Let V and W be linear subspaces
Linear algebra and applications to graphs Part 1 Written up by Mikhail Belkin and Moon Duchin Instructor: Laszlo Babai June 17, 2001 1 Basic Linear Algebra Exercise 1.1 Let V and W be linear subspaces
Data Analysis and Manifold Learning Lecture 3: Graphs, Graph Matrices, and Graph Embeddings
 Data Analysis and Manifold Learning Lecture 3: Graphs, Graph Matrices, and Graph Embeddings Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inrialpes.fr http://perception.inrialpes.fr/ Outline
Data Analysis and Manifold Learning Lecture 3: Graphs, Graph Matrices, and Graph Embeddings Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inrialpes.fr http://perception.inrialpes.fr/ Outline
CS 231A Section 1: Linear Algebra & Probability Review
 CS 231A Section 1: Linear Algebra & Probability Review 1 Topics Support Vector Machines Boosting Viola-Jones face detector Linear Algebra Review Notation Operations & Properties Matrix Calculus Probability
CS 231A Section 1: Linear Algebra & Probability Review 1 Topics Support Vector Machines Boosting Viola-Jones face detector Linear Algebra Review Notation Operations & Properties Matrix Calculus Probability
Spectra of Adjacency and Laplacian Matrices
 Spectra of Adjacency and Laplacian Matrices Definition: University of Alicante (Spain) Matrix Computing (subject 3168 Degree in Maths) 30 hours (theory)) + 15 hours (practical assignment) Contents 1. Spectra
Spectra of Adjacency and Laplacian Matrices Definition: University of Alicante (Spain) Matrix Computing (subject 3168 Degree in Maths) 30 hours (theory)) + 15 hours (practical assignment) Contents 1. Spectra
arxiv: v1 [math.co] 1 Mar 2017
![arxiv: v1 [math.co] 1 Mar 2017](/thumbs/94/122076271.jpg "arxiv: v1 [math.co] 1 Mar 2017") IMPROVEMENTS ON SPECTRAL BISECTION ISRAEL ROCHA arxiv:1703.00268v1 [math.co] 1 Mar 2017 Abstract. We investigate combinatorial properties of certain configurations of a graph partition which are related
IMPROVEMENTS ON SPECTRAL BISECTION ISRAEL ROCHA arxiv:1703.00268v1 [math.co] 1 Mar 2017 Abstract. We investigate combinatorial properties of certain configurations of a graph partition which are related
Data Analysis and Manifold Learning Lecture 7: Spectral Clustering
 Data Analysis and Manifold Learning Lecture 7: Spectral Clustering Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inrialpes.fr http://perception.inrialpes.fr/ Outline of Lecture 7 What is spectral
Data Analysis and Manifold Learning Lecture 7: Spectral Clustering Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inrialpes.fr http://perception.inrialpes.fr/ Outline of Lecture 7 What is spectral
Locally-biased analytics
 Locally-biased analytics You have BIG data and want to analyze a small part of it: Solution 1: Cut out small part and use traditional methods Challenge: cutting out may be difficult a priori Solution 2:
Locally-biased analytics You have BIG data and want to analyze a small part of it: Solution 1: Cut out small part and use traditional methods Challenge: cutting out may be difficult a priori Solution 2:
Certifying the Global Optimality of Graph Cuts via Semidefinite Programming: A Theoretic Guarantee for Spectral Clustering
 Certifying the Global Optimality of Graph Cuts via Semidefinite Programming: A Theoretic Guarantee for Spectral Clustering Shuyang Ling Courant Institute of Mathematical Sciences, NYU Aug 13, 2018 Joint
Certifying the Global Optimality of Graph Cuts via Semidefinite Programming: A Theoretic Guarantee for Spectral Clustering Shuyang Ling Courant Institute of Mathematical Sciences, NYU Aug 13, 2018 Joint
Part I: Preliminary Results. Pak K. Chan, Martine Schlag and Jason Zien. Computer Engineering Board of Studies. University of California, Santa Cruz
 Spectral K-Way Ratio-Cut Partitioning Part I: Preliminary Results Pak K. Chan, Martine Schlag and Jason Zien Computer Engineering Board of Studies University of California, Santa Cruz May, 99 Abstract
Spectral K-Way Ratio-Cut Partitioning Part I: Preliminary Results Pak K. Chan, Martine Schlag and Jason Zien Computer Engineering Board of Studies University of California, Santa Cruz May, 99 Abstract
Ma/CS 6b Class 23: Eigenvalues in Regular Graphs
 Ma/CS 6b Class 3: Eigenvalues in Regular Graphs By Adam Sheffer Recall: The Spectrum of a Graph Consider a graph G = V, E and let A be the adjacency matrix of G. The eigenvalues of G are the eigenvalues
Ma/CS 6b Class 3: Eigenvalues in Regular Graphs By Adam Sheffer Recall: The Spectrum of a Graph Consider a graph G = V, E and let A be the adjacency matrix of G. The eigenvalues of G are the eigenvalues
CS 664 Segmentation (2) Daniel Huttenlocher
 Daniel Huttenlocher") CS 664 Segmentation (2) Daniel Huttenlocher Recap Last time covered perceptual organization more broadly, focused in on pixel-wise segmentation Covered local graph-based methods such as MST and Felzenszwalb-Huttenlocher
CS 664 Segmentation (2) Daniel Huttenlocher Recap Last time covered perceptual organization more broadly, focused in on pixel-wise segmentation Covered local graph-based methods such as MST and Felzenszwalb-Huttenlocher
Conjugate gradient acceleration of non-linear smoothing filters Iterated edge-preserving smoothing
 Cambridge, Massachusetts Conjugate gradient acceleration of non-linear smoothing filters Iterated edge-preserving smoothing Andrew Knyazev (knyazev@merl.com) (speaker) Alexander Malyshev (malyshev@merl.com)
Cambridge, Massachusetts Conjugate gradient acceleration of non-linear smoothing filters Iterated edge-preserving smoothing Andrew Knyazev (knyazev@merl.com) (speaker) Alexander Malyshev (malyshev@merl.com)
Summary: A Random Walks View of Spectral Segmentation, by Marina Meila (University of Washington) and Jianbo Shi (Carnegie Mellon University)
 and Jianbo Shi (Carnegie Mellon University)") Summary: A Random Walks View of Spectral Segmentation, by Marina Meila (University of Washington) and Jianbo Shi (Carnegie Mellon University) The authors explain how the NCut algorithm for graph bisection
Summary: A Random Walks View of Spectral Segmentation, by Marina Meila (University of Washington) and Jianbo Shi (Carnegie Mellon University) The authors explain how the NCut algorithm for graph bisection
An indicator for the number of clusters using a linear map to simplex structure
 An indicator for the number of clusters using a linear map to simplex structure Marcus Weber, Wasinee Rungsarityotin, and Alexander Schliep Zuse Institute Berlin ZIB Takustraße 7, D-495 Berlin, Germany
An indicator for the number of clusters using a linear map to simplex structure Marcus Weber, Wasinee Rungsarityotin, and Alexander Schliep Zuse Institute Berlin ZIB Takustraße 7, D-495 Berlin, Germany
STA141C: Big Data & High Performance Statistical Computing
 STA141C: Big Data & High Performance Statistical Computing Lecture 12: Graph Clustering Cho-Jui Hsieh UC Davis May 29, 2018 Graph Clustering Given a graph G = (V, E, W ) V : nodes {v 1,, v n } E: edges
STA141C: Big Data & High Performance Statistical Computing Lecture 12: Graph Clustering Cho-Jui Hsieh UC Davis May 29, 2018 Graph Clustering Given a graph G = (V, E, W ) V : nodes {v 1,, v n } E: edges
Graph Clustering Algorithms
 PhD Course on Graph Mining Algorithms, Università di Pisa February, 2018 Clustering: Intuition to Formalization Task Partition a graph into natural groups so that the nodes in the same cluster are more
PhD Course on Graph Mining Algorithms, Università di Pisa February, 2018 Clustering: Intuition to Formalization Task Partition a graph into natural groups so that the nodes in the same cluster are more
Graph Partitioning Using Random Walks
 Graph Partitioning Using Random Walks A Convex Optimization Perspective Lorenzo Orecchia Computer Science Why Spectral Algorithms for Graph Problems in practice? Simple to implement Can exploit very efficient
Graph Partitioning Using Random Walks A Convex Optimization Perspective Lorenzo Orecchia Computer Science Why Spectral Algorithms for Graph Problems in practice? Simple to implement Can exploit very efficient
Spectral Theory of Unsigned and Signed Graphs Applications to Graph Clustering. Some Slides
 Spectral Theory of Unsigned and Signed Graphs Applications to Graph Clustering Some Slides Jean Gallier Department of Computer and Information Science University of Pennsylvania Philadelphia, PA 19104,
Spectral Theory of Unsigned and Signed Graphs Applications to Graph Clustering Some Slides Jean Gallier Department of Computer and Information Science University of Pennsylvania Philadelphia, PA 19104,
Partitioning Networks by Eigenvectors
 1 Partitioning Networks by Eigenvectors Andrew J. Seary and William D. Richards School of Communication, Simon Fraser University Burnaby, British Columbia, Canada INSNA Sunbelt XVI London, July, 1995.
1 Partitioning Networks by Eigenvectors Andrew J. Seary and William D. Richards School of Communication, Simon Fraser University Burnaby, British Columbia, Canada INSNA Sunbelt XVI London, July, 1995.
1 Matrix notation and preliminaries from spectral graph theory
 Graph clustering (or community detection or graph partitioning) is one of the most studied problems in network analysis. One reason for this is that there are a variety of ways to define a cluster or community.
Graph clustering (or community detection or graph partitioning) is one of the most studied problems in network analysis. One reason for this is that there are a variety of ways to define a cluster or community.
Convex Optimization of Graph Laplacian Eigenvalues
 Convex Optimization of Graph Laplacian Eigenvalues Stephen Boyd Abstract. We consider the problem of choosing the edge weights of an undirected graph so as to maximize or minimize some function of the
Convex Optimization of Graph Laplacian Eigenvalues Stephen Boyd Abstract. We consider the problem of choosing the edge weights of an undirected graph so as to maximize or minimize some function of the
Unsupervised Clustering of Human Pose Using Spectral Embedding
 Unsupervised Clustering of Human Pose Using Spectral Embedding Muhammad Haseeb and Edwin R Hancock Department of Computer Science, The University of York, UK Abstract In this paper we use the spectra of
Unsupervised Clustering of Human Pose Using Spectral Embedding Muhammad Haseeb and Edwin R Hancock Department of Computer Science, The University of York, UK Abstract In this paper we use the spectra of
Lecture 9 Approximations of Laplace s Equation, Finite Element Method. Mathématiques appliquées (MATH0504-1) B. Dewals, C.
 B. Dewals, C.") Lecture 9 Approximations of Laplace s Equation, Finite Element Method Mathématiques appliquées (MATH54-1) B. Dewals, C. Geuzaine V1.2 23/11/218 1 Learning objectives of this lecture Apply the finite difference
Lecture 9 Approximations of Laplace s Equation, Finite Element Method Mathématiques appliquées (MATH54-1) B. Dewals, C. Geuzaine V1.2 23/11/218 1 Learning objectives of this lecture Apply the finite difference
Final Examination. CS 205A: Mathematical Methods for Robotics, Vision, and Graphics (Fall 2013), Stanford University
, Stanford University") Final Examination CS 205A: Mathematical Methods for Robotics, Vision, and Graphics (Fall 2013), Stanford University The exam runs for 3 hours. The exam contains eight problems. You must complete the first
Final Examination CS 205A: Mathematical Methods for Robotics, Vision, and Graphics (Fall 2013), Stanford University The exam runs for 3 hours. The exam contains eight problems. You must complete the first
Lecture 13: Spectral Graph Theory
 CSE 521: Design and Analysis of Algorithms I Winter 2017 Lecture 13: Spectral Graph Theory Lecturer: Shayan Oveis Gharan 11/14/18 Disclaimer: These notes have not been subjected to the usual scrutiny reserved
CSE 521: Design and Analysis of Algorithms I Winter 2017 Lecture 13: Spectral Graph Theory Lecturer: Shayan Oveis Gharan 11/14/18 Disclaimer: These notes have not been subjected to the usual scrutiny reserved
Random Walks and Electric Resistance on Distance-Regular Graphs
 Random Walks and Electric Resistance on Distance-Regular Graphs Greg Markowsky March 16, 2011 Graphs A graph is a set of vertices V (can be taken to be {1, 2,..., n}) and edges E, where each edge is an
Random Walks and Electric Resistance on Distance-Regular Graphs Greg Markowsky March 16, 2011 Graphs A graph is a set of vertices V (can be taken to be {1, 2,..., n}) and edges E, where each edge is an
AMS526: Numerical Analysis I (Numerical Linear Algebra)
") AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 19: More on Arnoldi Iteration; Lanczos Iteration Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical Analysis I 1 / 17 Outline 1
AMS526: Numerical Analysis I (Numerical Linear Algebra) Lecture 19: More on Arnoldi Iteration; Lanczos Iteration Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical Analysis I 1 / 17 Outline 1
Research on Consistency Problem of Network Multi-agent Car System with State Predictor
 International Core Journal of Engineering Vol. No.9 06 ISSN: 44-895 Research on Consistency Problem of Network Multi-agent Car System with State Predictor Yue Duan a, Linli Zhou b and Yue Wu c Institute
International Core Journal of Engineering Vol. No.9 06 ISSN: 44-895 Research on Consistency Problem of Network Multi-agent Car System with State Predictor Yue Duan a, Linli Zhou b and Yue Wu c Institute
Eigenvalues of tensors
 Eigenvalues of tensors and some very basic spectral hypergraph theory Lek-Heng Lim Matrix Computations and Scientific Computing Seminar April 16, 2008 Lek-Heng Lim (MCSC Seminar) Eigenvalues of tensors
Eigenvalues of tensors and some very basic spectral hypergraph theory Lek-Heng Lim Matrix Computations and Scientific Computing Seminar April 16, 2008 Lek-Heng Lim (MCSC Seminar) Eigenvalues of tensors
Networks and Their Spectra
 Networks and Their Spectra Victor Amelkin University of California, Santa Barbara Department of Computer Science victor@cs.ucsb.edu December 4, 2017 1 / 18 Introduction Networks (= graphs) are everywhere.
Networks and Their Spectra Victor Amelkin University of California, Santa Barbara Department of Computer Science victor@cs.ucsb.edu December 4, 2017 1 / 18 Introduction Networks (= graphs) are everywhere.
Spectral Clustering. Guokun Lai 2016/10
 Spectral Clustering Guokun Lai 2016/10 1 / 37 Organization Graph Cut Fundamental Limitations of Spectral Clustering Ng 2002 paper (if we have time) 2 / 37 Notation We define a undirected weighted graph
Spectral Clustering Guokun Lai 2016/10 1 / 37 Organization Graph Cut Fundamental Limitations of Spectral Clustering Ng 2002 paper (if we have time) 2 / 37 Notation We define a undirected weighted graph
Lecture Introduction. 2 Brief Recap of Lecture 10. CS-621 Theory Gems October 24, 2012
 CS-62 Theory Gems October 24, 202 Lecture Lecturer: Aleksander Mądry Scribes: Carsten Moldenhauer and Robin Scheibler Introduction In Lecture 0, we introduced a fundamental object of spectral graph theory:
CS-62 Theory Gems October 24, 202 Lecture Lecturer: Aleksander Mądry Scribes: Carsten Moldenhauer and Robin Scheibler Introduction In Lecture 0, we introduced a fundamental object of spectral graph theory:
Lecture: Modeling graphs with electrical networks
 Stat260/CS294: Spectral Graph Methods Lecture 16-03/17/2015 Lecture: Modeling graphs with electrical networks Lecturer: Michael Mahoney Scribe: Michael Mahoney Warning: these notes are still very rough.
Stat260/CS294: Spectral Graph Methods Lecture 16-03/17/2015 Lecture: Modeling graphs with electrical networks Lecturer: Michael Mahoney Scribe: Michael Mahoney Warning: these notes are still very rough.
On the Maximal Error of Spectral Approximation of Graph Bisection
 To appear in Linear and Multilinear Algebra Vol. 00, No. 00, Month 20XX, 1 9 On the Maximal Error of Spectral Approximation of Graph Bisection John C. Urschel a,b,c, and Ludmil T. Zikatanov c,d, a Baltimore
To appear in Linear and Multilinear Algebra Vol. 00, No. 00, Month 20XX, 1 9 On the Maximal Error of Spectral Approximation of Graph Bisection John C. Urschel a,b,c, and Ludmil T. Zikatanov c,d, a Baltimore
Computational Methods. Eigenvalues and Singular Values
 Computational Methods Eigenvalues and Singular Values Manfred Huber 2010 1 Eigenvalues and Singular Values Eigenvalues and singular values describe important aspects of transformations and of data relations
Computational Methods Eigenvalues and Singular Values Manfred Huber 2010 1 Eigenvalues and Singular Values Eigenvalues and singular values describe important aspects of transformations and of data relations
AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences)
") AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences) Lecture 19: Computing the SVD; Sparse Linear Systems Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical
AMS526: Numerical Analysis I (Numerical Linear Algebra for Computational and Data Sciences) Lecture 19: Computing the SVD; Sparse Linear Systems Xiangmin Jiao Stony Brook University Xiangmin Jiao Numerical
Spectral clustering. Two ideal clusters, with two points each. Spectral clustering algorithms
 A simple example Two ideal clusters, with two points each Spectral clustering Lecture 2 Spectral clustering algorithms 4 2 3 A = Ideally permuted Ideal affinities 2 Indicator vectors Each cluster has an
A simple example Two ideal clusters, with two points each Spectral clustering Lecture 2 Spectral clustering algorithms 4 2 3 A = Ideally permuted Ideal affinities 2 Indicator vectors Each cluster has an
CS 231A Section 1: Linear Algebra & Probability Review. Kevin Tang
 CS 231A Section 1: Linear Algebra & Probability Review Kevin Tang Kevin Tang Section 1-1 9/30/2011 Topics Support Vector Machines Boosting Viola Jones face detector Linear Algebra Review Notation Operations
CS 231A Section 1: Linear Algebra & Probability Review Kevin Tang Kevin Tang Section 1-1 9/30/2011 Topics Support Vector Machines Boosting Viola Jones face detector Linear Algebra Review Notation Operations
1 Review: symmetric matrices, their eigenvalues and eigenvectors
 Cornell University, Fall 2012 Lecture notes on spectral methods in algorithm design CS 6820: Algorithms Studying the eigenvalues and eigenvectors of matrices has powerful consequences for at least three
Cornell University, Fall 2012 Lecture notes on spectral methods in algorithm design CS 6820: Algorithms Studying the eigenvalues and eigenvectors of matrices has powerful consequences for at least three
Machine Learning for Data Science (CS4786) Lecture 11
 Lecture 11") Machine Learning for Data Science (CS4786) Lecture 11 Spectral clustering Course Webpage : http://www.cs.cornell.edu/courses/cs4786/2016sp/ ANNOUNCEMENT 1 Assignment P1 the Diagnostic assignment 1 will
Machine Learning for Data Science (CS4786) Lecture 11 Spectral clustering Course Webpage : http://www.cs.cornell.edu/courses/cs4786/2016sp/ ANNOUNCEMENT 1 Assignment P1 the Diagnostic assignment 1 will
Asymmetric Cheeger cut and application to multi-class unsupervised clustering
 Asymmetric Cheeger cut and application to multi-class unsupervised clustering Xavier Bresson Thomas Laurent April 8, 0 Abstract Cheeger cut has recently been shown to provide excellent classification results
Asymmetric Cheeger cut and application to multi-class unsupervised clustering Xavier Bresson Thomas Laurent April 8, 0 Abstract Cheeger cut has recently been shown to provide excellent classification results
Communities, Spectral Clustering, and Random Walks
 Communities, Spectral Clustering, and Random Walks David Bindel Department of Computer Science Cornell University 26 Sep 2011 20 21 19 16 22 28 17 18 29 26 27 30 23 1 25 5 8 24 2 4 14 3 9 13 15 11 10 12
Communities, Spectral Clustering, and Random Walks David Bindel Department of Computer Science Cornell University 26 Sep 2011 20 21 19 16 22 28 17 18 29 26 27 30 23 1 25 5 8 24 2 4 14 3 9 13 15 11 10 12
CS168: The Modern Algorithmic Toolbox Lectures #11 and #12: Spectral Graph Theory
 CS168: The Modern Algorithmic Toolbox Lectures #11 and #12: Spectral Graph Theory Tim Roughgarden & Gregory Valiant May 2, 2016 Spectral graph theory is the powerful and beautiful theory that arises from
CS168: The Modern Algorithmic Toolbox Lectures #11 and #12: Spectral Graph Theory Tim Roughgarden & Gregory Valiant May 2, 2016 Spectral graph theory is the powerful and beautiful theory that arises from
Spectral Generative Models for Graphs
 Spectral Generative Models for Graphs David White and Richard C. Wilson Department of Computer Science University of York Heslington, York, UK wilson@cs.york.ac.uk Abstract Generative models are well known
Spectral Generative Models for Graphs David White and Richard C. Wilson Department of Computer Science University of York Heslington, York, UK wilson@cs.york.ac.uk Abstract Generative models are well known
Diffuse interface methods on graphs: Data clustering and Gamma-limits
 Diffuse interface methods on graphs: Data clustering and Gamma-limits Yves van Gennip joint work with Andrea Bertozzi, Jeff Brantingham, Blake Hunter Department of Mathematics, UCLA Research made possible
Diffuse interface methods on graphs: Data clustering and Gamma-limits Yves van Gennip joint work with Andrea Bertozzi, Jeff Brantingham, Blake Hunter Department of Mathematics, UCLA Research made possible
Spectral Processing. Misha Kazhdan
 Spectral Processing Misha Kazhdan [Taubin, 1995] A Signal Processing Approach to Fair Surface Design [Desbrun, et al., 1999] Implicit Fairing of Arbitrary Meshes [Vallet and Levy, 2008] Spectral Geometry
Spectral Processing Misha Kazhdan [Taubin, 1995] A Signal Processing Approach to Fair Surface Design [Desbrun, et al., 1999] Implicit Fairing of Arbitrary Meshes [Vallet and Levy, 2008] Spectral Geometry
Fast Krylov Methods for N-Body Learning
 Fast Krylov Methods for N-Body Learning Nando de Freitas Department of Computer Science University of British Columbia nando@cs.ubc.ca Maryam Mahdaviani Department of Computer Science University of British
Fast Krylov Methods for N-Body Learning Nando de Freitas Department of Computer Science University of British Columbia nando@cs.ubc.ca Maryam Mahdaviani Department of Computer Science University of British
Graph Embedding Techniques for Bounding Condition Numbers of Incomplete Factor Preconditioners
 NASA/CR-01741 ICASE Report No. 97-47 Graph Embedding Techniques for Bounding Condition Numbers of Incomplete Factor Preconditioners Stephen Guattery ICASE Institute for Computer Applications in Science
NASA/CR-01741 ICASE Report No. 97-47 Graph Embedding Techniques for Bounding Condition Numbers of Incomplete Factor Preconditioners Stephen Guattery ICASE Institute for Computer Applications in Science
CAAM 454/554: Stationary Iterative Methods
 CAAM 454/554: Stationary Iterative Methods Yin Zhang (draft) CAAM, Rice University, Houston, TX 77005 2007, Revised 2010 Abstract Stationary iterative methods for solving systems of linear equations are
CAAM 454/554: Stationary Iterative Methods Yin Zhang (draft) CAAM, Rice University, Houston, TX 77005 2007, Revised 2010 Abstract Stationary iterative methods for solving systems of linear equations are
Math 307 Learning Goals
 Math 307 Learning Goals May 14, 2018 Chapter 1 Linear Equations 1.1 Solving Linear Equations Write a system of linear equations using matrix notation. Use Gaussian elimination to bring a system of linear
Math 307 Learning Goals May 14, 2018 Chapter 1 Linear Equations 1.1 Solving Linear Equations Write a system of linear equations using matrix notation. Use Gaussian elimination to bring a system of linear
ORIE 6334 Spectral Graph Theory October 13, Lecture 15
 ORIE 6334 Spectral Graph heory October 3, 206 Lecture 5 Lecturer: David P. Williamson Scribe: Shijin Rajakrishnan Iterative Methods We have seen in the previous lectures that given an electrical network,
ORIE 6334 Spectral Graph heory October 3, 206 Lecture 5 Lecturer: David P. Williamson Scribe: Shijin Rajakrishnan Iterative Methods We have seen in the previous lectures that given an electrical network,
Lecture: Local Spectral Methods (1 of 4)
") Stat260/CS294: Spectral Graph Methods Lecture 18-03/31/2015 Lecture: Local Spectral Methods (1 of 4) Lecturer: Michael Mahoney Scribe: Michael Mahoney Warning: these notes are still very rough. They provide
Stat260/CS294: Spectral Graph Methods Lecture 18-03/31/2015 Lecture: Local Spectral Methods (1 of 4) Lecturer: Michael Mahoney Scribe: Michael Mahoney Warning: these notes are still very rough. They provide
Scale Space Analysis by Stabilized Inverse Diffusion Equations
 Scale Space Analysis by Stabilized Inverse Diffusion Equations Ilya Pollak, Alan S. Willsky and Hamid Krim Laboratory for Information and Decision Systems, Massachusetts Institute of Technology, 77 Massachusetts
Scale Space Analysis by Stabilized Inverse Diffusion Equations Ilya Pollak, Alan S. Willsky and Hamid Krim Laboratory for Information and Decision Systems, Massachusetts Institute of Technology, 77 Massachusetts
Two-View Segmentation of Dynamic Scenes from the Multibody Fundamental Matrix
 Two-View Segmentation of Dynamic Scenes from the Multibody Fundamental Matrix René Vidal Stefano Soatto Shankar Sastry Department of EECS, UC Berkeley Department of Computer Sciences, UCLA 30 Cory Hall,
Two-View Segmentation of Dynamic Scenes from the Multibody Fundamental Matrix René Vidal Stefano Soatto Shankar Sastry Department of EECS, UC Berkeley Department of Computer Sciences, UCLA 30 Cory Hall,
Inverse Power Method for Non-linear Eigenproblems
 Inverse Power Method for Non-linear Eigenproblems Matthias Hein and Thomas Bühler Anubhav Dwivedi Department of Aerospace Engineering & Mechanics 7th March, 2017 1 / 30 OUTLINE Motivation Non-Linear Eigenproblems
Inverse Power Method for Non-linear Eigenproblems Matthias Hein and Thomas Bühler Anubhav Dwivedi Department of Aerospace Engineering & Mechanics 7th March, 2017 1 / 30 OUTLINE Motivation Non-Linear Eigenproblems
Spectral Graph Theory
 Spectral Graph Theory Aaron Mishtal April 27, 2016 1 / 36 Outline Overview Linear Algebra Primer History Theory Applications Open Problems Homework Problems References 2 / 36 Outline Overview Linear Algebra
Spectral Graph Theory Aaron Mishtal April 27, 2016 1 / 36 Outline Overview Linear Algebra Primer History Theory Applications Open Problems Homework Problems References 2 / 36 Outline Overview Linear Algebra
TOPOLOGY FOR GLOBAL AVERAGE CONSENSUS. Soummya Kar and José M. F. Moura
 TOPOLOGY FOR GLOBAL AVERAGE CONSENSUS Soummya Kar and José M. F. Moura Department of Electrical and Computer Engineering Carnegie Mellon University, Pittsburgh, PA 15213 USA (e-mail:{moura}@ece.cmu.edu)
TOPOLOGY FOR GLOBAL AVERAGE CONSENSUS Soummya Kar and José M. F. Moura Department of Electrical and Computer Engineering Carnegie Mellon University, Pittsburgh, PA 15213 USA (e-mail:{moura}@ece.cmu.edu)
Diffusion and random walks on graphs
 Diffusion and random walks on graphs Leonid E. Zhukov School of Data Analysis and Artificial Intelligence Department of Computer Science National Research University Higher School of Economics Structural
Diffusion and random walks on graphs Leonid E. Zhukov School of Data Analysis and Artificial Intelligence Department of Computer Science National Research University Higher School of Economics Structural
Learning Spectral Graph Segmentation
 Learning Spectral Graph Segmentation AISTATS 2005 Timothée Cour Jianbo Shi Nicolas Gogin Computer and Information Science Department University of Pennsylvania Computer Science Ecole Polytechnique Graph-based
Learning Spectral Graph Segmentation AISTATS 2005 Timothée Cour Jianbo Shi Nicolas Gogin Computer and Information Science Department University of Pennsylvania Computer Science Ecole Polytechnique Graph-based
Self-Tuning Spectral Clustering
 Self-Tuning Spectral Clustering Lihi Zelnik-Manor Pietro Perona Department of Electrical Engineering Department of Electrical Engineering California Institute of Technology California Institute of Technology
Self-Tuning Spectral Clustering Lihi Zelnik-Manor Pietro Perona Department of Electrical Engineering Department of Electrical Engineering California Institute of Technology California Institute of Technology
Math Introduction to Numerical Analysis - Class Notes. Fernando Guevara Vasquez. Version Date: January 17, 2012.
 Math 5620 - Introduction to Numerical Analysis - Class Notes Fernando Guevara Vasquez Version 1990. Date: January 17, 2012. 3 Contents 1. Disclaimer 4 Chapter 1. Iterative methods for solving linear systems
Math 5620 - Introduction to Numerical Analysis - Class Notes Fernando Guevara Vasquez Version 1990. Date: January 17, 2012. 3 Contents 1. Disclaimer 4 Chapter 1. Iterative methods for solving linear systems
ACM/CMS 107 Linear Analysis & Applications Fall 2017 Assignment 2: PDEs and Finite Element Methods Due: 7th November 2017
 ACM/CMS 17 Linear Analysis & Applications Fall 217 Assignment 2: PDEs and Finite Element Methods Due: 7th November 217 For this assignment the following MATLAB code will be required: Introduction http://wwwmdunloporg/cms17/assignment2zip
ACM/CMS 17 Linear Analysis & Applications Fall 217 Assignment 2: PDEs and Finite Element Methods Due: 7th November 217 For this assignment the following MATLAB code will be required: Introduction http://wwwmdunloporg/cms17/assignment2zip
Rank-one LMIs and Lyapunov's Inequality. Gjerrit Meinsma 4. Abstract. We describe a new proof of the well-known Lyapunov's matrix inequality about
 Rank-one LMIs and Lyapunov's Inequality Didier Henrion 1;; Gjerrit Meinsma Abstract We describe a new proof of the well-known Lyapunov's matrix inequality about the location of the eigenvalues of a matrix
Rank-one LMIs and Lyapunov's Inequality Didier Henrion 1;; Gjerrit Meinsma Abstract We describe a new proof of the well-known Lyapunov's matrix inequality about the location of the eigenvalues of a matrix
Chapter 11. Matrix Algorithms and Graph Partitioning. M. E. J. Newman. June 10, M. E. J. Newman Chapter 11 June 10, / 43
 Chapter 11 Matrix Algorithms and Graph Partitioning M. E. J. Newman June 10, 2016 M. E. J. Newman Chapter 11 June 10, 2016 1 / 43 Table of Contents 1 Eigenvalue and Eigenvector Eigenvector Centrality The
Chapter 11 Matrix Algorithms and Graph Partitioning M. E. J. Newman June 10, 2016 M. E. J. Newman Chapter 11 June 10, 2016 1 / 43 Table of Contents 1 Eigenvalue and Eigenvector Eigenvector Centrality The
Random walks for deformable image registration Dana Cobzas
 Random walks for deformable image registration Dana Cobzas with Abhishek Sen, Martin Jagersand, Neil Birkbeck, Karteek Popuri Computing Science, University of Alberta, Edmonton Deformable image registration?t
Random walks for deformable image registration Dana Cobzas with Abhishek Sen, Martin Jagersand, Neil Birkbeck, Karteek Popuri Computing Science, University of Alberta, Edmonton Deformable image registration?t
OUTLINE 1. Introduction 1.1 Notation 1.2 Special matrices 2. Gaussian Elimination 2.1 Vector and matrix norms 2.2 Finite precision arithmetic 2.3 Fact
 Computational Linear Algebra Course: (MATH: 6800, CSCI: 6800) Semester: Fall 1998 Instructors: { Joseph E. Flaherty, aherje@cs.rpi.edu { Franklin T. Luk, luk@cs.rpi.edu { Wesley Turner, turnerw@cs.rpi.edu
Computational Linear Algebra Course: (MATH: 6800, CSCI: 6800) Semester: Fall 1998 Instructors: { Joseph E. Flaherty, aherje@cs.rpi.edu { Franklin T. Luk, luk@cs.rpi.edu { Wesley Turner, turnerw@cs.rpi.edu
17.1 Directed Graphs, Undirected Graphs, Incidence Matrices, Adjacency Matrices, Weighted Graphs
 Chapter 17 Graphs and Graph Laplacians 17.1 Directed Graphs, Undirected Graphs, Incidence Matrices, Adjacency Matrices, Weighted Graphs Definition 17.1. A directed graph isa pairg =(V,E), where V = {v
Chapter 17 Graphs and Graph Laplacians 17.1 Directed Graphs, Undirected Graphs, Incidence Matrices, Adjacency Matrices, Weighted Graphs Definition 17.1. A directed graph isa pairg =(V,E), where V = {v
Markov Chains, Random Walks on Graphs, and the Laplacian
 Markov Chains, Random Walks on Graphs, and the Laplacian CMPSCI 791BB: Advanced ML Sridhar Mahadevan Random Walks! There is significant interest in the problem of random walks! Markov chain analysis! Computer
Markov Chains, Random Walks on Graphs, and the Laplacian CMPSCI 791BB: Advanced ML Sridhar Mahadevan Random Walks! There is significant interest in the problem of random walks! Markov chain analysis! Computer
Embedding and Spectrum of Graphs
 Embedding and Spectrum of Graphs Ali Shokoufandeh, Department of Computer Science, Drexel University Overview Approximation Algorithms Geometry of Graphs and Graphs Encoding the Geometry Spectral Graph
Embedding and Spectrum of Graphs Ali Shokoufandeh, Department of Computer Science, Drexel University Overview Approximation Algorithms Geometry of Graphs and Graphs Encoding the Geometry Spectral Graph
Stabilization and Acceleration of Algebraic Multigrid Method
 Stabilization and Acceleration of Algebraic Multigrid Method Recursive Projection Algorithm A. Jemcov J.P. Maruszewski Fluent Inc. October 24, 2006 Outline 1 Need for Algorithm Stabilization and Acceleration
Stabilization and Acceleration of Algebraic Multigrid Method Recursive Projection Algorithm A. Jemcov J.P. Maruszewski Fluent Inc. October 24, 2006 Outline 1 Need for Algorithm Stabilization and Acceleration
Motivation: Sparse matrices and numerical PDE's
 Lecture 20: Numerical Linear Algebra #4 Iterative methods and Eigenproblems Outline 1) Motivation: beyond LU for Ax=b A little PDE's and sparse matrices A) Temperature Equation B) Poisson Equation 2) Splitting
Lecture 20: Numerical Linear Algebra #4 Iterative methods and Eigenproblems Outline 1) Motivation: beyond LU for Ax=b A little PDE's and sparse matrices A) Temperature Equation B) Poisson Equation 2) Splitting
Linear Algebra Massoud Malek
 CSUEB Linear Algebra Massoud Malek Inner Product and Normed Space In all that follows, the n n identity matrix is denoted by I n, the n n zero matrix by Z n, and the zero vector by θ n An inner product
CSUEB Linear Algebra Massoud Malek Inner Product and Normed Space In all that follows, the n n identity matrix is denoted by I n, the n n zero matrix by Z n, and the zero vector by θ n An inner product
Low Rank Approximation Lecture 7. Daniel Kressner Chair for Numerical Algorithms and HPC Institute of Mathematics, EPFL
 Low Rank Approximation Lecture 7 Daniel Kressner Chair for Numerical Algorithms and HPC Institute of Mathematics, EPFL daniel.kressner@epfl.ch 1 Alternating least-squares / linear scheme General setting:
Low Rank Approximation Lecture 7 Daniel Kressner Chair for Numerical Algorithms and HPC Institute of Mathematics, EPFL daniel.kressner@epfl.ch 1 Alternating least-squares / linear scheme General setting: