Fourier Transform Fast Fourier Transform discovered by Carl Gauss ~1805 re- re invented by Cooley & Tukey in 1965
|
|
|
- Eustace Price
- 6 years ago
- Views:
Transcription



1 ourier Transform ast ourier Transform discovered by Carl Gauss ~85 re-invented by Cooley & Tukey in 965 wikipedia


2 Next concepts Shannon s Theorem ourier analysis Complex notation Rotating vectors Angular and circular frequency, initial phase Vector representation ti of sinusoidal id signal A sinusoid sampled with the sample rate twice its frequency
 The highest")
 θ a (cos θ +jsin θ ) Euler s relationship e jθ (cos θ + j sin θ )")
3 requency aliasing and Shannon s Theorem A sinusoid sampled with the sample rate less than twice its frequency: A false frequency is detected In order to prevent the frequency aliasing the signal cannot contain components with frequencies above half of the sample rate (they must be filtered out) The highest frequency detectable without aliasing is equal to half of the sample rate. Half of the sample rate is called the Nyquist frequency. Two-dimensional vector Complex notation a + j b a cos θ b sin θ Imag jb a + b θ atan (b/a) θ a (cos θ +jsin θ ) Euler s relationship e jθ (cos θ + j sin θ ) e -jθ (cos θ -j sin θ ) e jθ Real
4 Complex conjugate Imaginary part has the opposite sign Imag jb * (cos θ -j sin θ ) * (a - j b ) θ a Real * e -jθ * A few tricks Let s rotate the axes so the Real points up Imag jb θ a Real *
5 A few tricks Let s rotate the axes so the Real points up A few tricks Let s rotate the axes so the Real points up
6 A few tricks Let s flip the labels A few tricks Let s flip the labels Real * θ a Imag jb -jb
7 Next concepts Negative frequency Discrete ourier Transform olded spectrum requency resolution Discussion on parameters for frequency domain analysis Two counter-rotating rotating vectors Real Angular frequency ω (radians/s) Circular frequency * f(hz) or (revs/s) a ω π f Initial phase (at time) φ (radians) ( t ) ( t) ( t) + j e e ( ω t +φ ) j( ω t +φ ) ( t) Imag j( ω t + φ ) j( ω t + φ ) ( e + e ) jb θ -jb θ ω t + φ [ cos( ωt + sin j( ωt + cos( ωt sin j( ωt ] cos( ωt θ πf t+ φ
8 Two counter-rotating rotating vectors ( t) cos( ωt + cos( ωt j( ωt+ φo ) j( ωt+ φ ) ( e + e ) [ j sin( ωt + cos( ωt j sin( ωt ] Two counter-rotating rotating vectors (negfreq.m) With half amplitude Being a complex conjugate of each other red-positive freq..5.5 Real Imaginary Time
9 How to make a vector rotating with frequency ω stationary At a given time the vector is ( t ) e e j( π f t+ φ ) j ( ω t+ φ ) Multiply by j t e ω j( ωt+ φ ) jωt e e e jφ After the multiplication the result is a vector whose phase angle does not change, i.e. it is stationary. Normally the signal contains more than one sinusoid (rotating vectors). If the signal contains another vector rotating with frequency ω, initial phase φ and magnitude, after the same multiplication by exp(-jωt) the resulting vector will still rotate with the frequency (ω ω) j( ω t+ φ ) j( ω t+ φ ) jωt jφ j( ω ω) t+ φ ) ( e + e ) e e + e By making this multiplication for all k data points sampled with the sampling interval Δt and adding the terms together th we obtain a stationary ti vector with the magnitude k * and, due to the cancelling effect, a near zero small vector for the second vector that still rotates
10 In general k n g( t n ) e jω t n G( ω) Discrete ourier Transform G(ω) is the magnitude of the harmonic component of the signal at frequency ω, multiplied k times. ast ourier Transform is a fast DT algorithm applicable to data samples with the size being a power of. 3-D representation of an element of the frequency spectrum (negfreq.m) red-positive freq..5.5 Real Re Imaginary Im req
11 G DC value (offset) (mean value) k jωtn ( ω) g( tn) e When ω G( ω n ) k n g( t ) e n k n g( t ) n T (ast ourier Transform) T algorithm is only AST if the number of points is a power of, e.g. 5, 4, 48 etc In a spectrum the DC value is at zero frequency (at the origin) In order to produce correct values the result of the T algorithm must be divided by the number of points When the negative frequency components are eliminated, the remaining matching positive frequency components must be doubled to compensate Example signal.m fftexample.m fftexample.m
12 olded spectrum frequency axis requency spectrum can only detect frequency components from from Hz to half of the sampling frequency. This is related to the Shannon Sampling Theorem. The limits of frequency axis are from Hz (DC value) to sreq/ Corresponding Matlab indices (folded) are from (one) to npts/+ Half of the sampling frequency is termed the Nyquist frequency irst - ve frequency A / Two-sided spectra Amplitude A / A / A / A o Last + ve frequency (Nyquist) -f npts- npts Δf Δf...f f s / 3 npts/+ A /4 Amplitude A /4 POWER A /4 A o A /4 -f Δf Δf f
13 IMPLEMENTATION O THE OLDING ALGORITHM - EXAMPLE sreq 8; npts 48; g?????; %obtain the signal df sreq/npts; fnyquist sreq / ; spec fft(g, npts); spec spec(:npts/+); spec spec / npts; spec(:end-) * spec(:end-); mag abs(spec); phase atan(imag(spec)./real(spec)); %or phase angle(spec); freq linspace(,fnyquist,npts/+)'; %or freq [: npts/]' * df; plot(freq, mag) plot(freq, phase); POWER olding into one-sided spectrum A /4 A /4 Amplitude A o A /4 A /4 -f Δf Δf Amplitude A / -sided A / POWER spectrum A o f Δf Δf f
14 Amplitude A / -sided POWER spectrum A o A / RMS spectrum -sided RMS amplitude spectrum Δf Δf Amplitude A o A / A / Δf Δf f f Resolution in time domain The smaller the sampling interval Δt, the better the time domain resolution Since Δt /sreq The faster the sampling frequency, the better the time domain resolution
15 Resolution in frequency domain The smaller the spacing between the lines of the spectrum Δf, the better the resolution in frequency domain. Δf sreq / npts, then The faster the sampling frequency, the worse the frequency resolution (opposite effect to the time domain). The more points, the better the frequency resolution. Because sreq / Δt Δf /(Δt * npts) /T, then The frequency resolution is inversely proportional to the time of observation, ie. it improves with the increased time of observation (recording). Example T settings () The RPM of a shaft is to be determined from the acceleration signal which contains fluctuations caused by the imbalance of the shaft. The acceptable error of the estimate is +/- rpm. The RPM is in the vicinity of 4 rpm. Discuss the settings of data acquisition system necessary to accomplish this task. The imbalance will produce a significant peak in the T spectrum. Its frequency (Hz) is equal to RPS (vicinity of 4/64 4 Hz). The theoretical minimum sampling frequency is at least twice that, ie 8 Hz
16 Example T settings () The RPM of a shaft is to be determined from the acceleration signal which contains fluctuations caused by the imbalance of the shaft. The acceptable error of the estimate is +/- rpm. The RPM is in the vicinity of 4 rpm. Discuss the settings of data acquisition system necessary to accomplish this task. The acceptable error corresponds to the resolution of the spectrum. Δf per min /6 per second /6 Hz Since Δf /T, the signal should be measured for at least 6 seconds. Since Δf sreq / npts sreq Δf * npts Assume the T size of 48 sreq /6 * Hz The sampling rate (frequency) should be below 34 Hz to obtain the resolution better than rpm (but more than 8 Hz). The sreq of 6 Hz will make the peak of appr. 4 Hz appear in the middle of the spectrum. In such a case npts 4 would be sufficient. Δf sreq / npts 6/4.56 Hz.94 min - Exercise Dynamic characteristics of a bridge is to be tested for structural resonances. The frequency bandwidth of interest is from to Hz and the required frequency resolution is at least. Hz Determine: The setting of anti-aliasing filter The possible combinations of sampling frequency and T size
17 Dynamic characteristics of a bridge system is to be tested for structural resonances. The frequency bandwidth of interest is from to Hz and the required frequency resolution is at least. Hz Determine: The setting of anti-aliasing filter The possible combinations of sampling frequency and T size Bandwidth - Nyquist frequency Sampling frequency > * Nyquist requency resolution /T T size T settings ling frequency, Hz Samp sreq npts *Δf.. requency resolution, Hz
3 What You Should Know About Complex Numbers
 3 What You Should Know About Complex Numbers Life is complex it has a real part, and an imaginary part Andrew Koenig. Complex numbers are an extension of the more familiar world of real numbers that make
3 What You Should Know About Complex Numbers Life is complex it has a real part, and an imaginary part Andrew Koenig. Complex numbers are an extension of the more familiar world of real numbers that make
Electric Circuit Theory
 Electric Circuit Theory Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Chapter 11 Sinusoidal Steady-State Analysis Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Contents and Objectives 3 Chapter Contents 11.1
Electric Circuit Theory Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Chapter 11 Sinusoidal Steady-State Analysis Nam Ki Min nkmin@korea.ac.kr 010-9419-2320 Contents and Objectives 3 Chapter Contents 11.1
Frequency Response. Re ve jφ e jωt ( ) where v is the amplitude and φ is the phase of the sinusoidal signal v(t). ve jφ
 where v is the amplitude and φ is the phase of the sinusoidal signal v(t). ve jφ") 27 Frequency Response Before starting, review phasor analysis, Bode plots... Key concept: small-signal models for amplifiers are linear and therefore, cosines and sines are solutions of the linear differential
27 Frequency Response Before starting, review phasor analysis, Bode plots... Key concept: small-signal models for amplifiers are linear and therefore, cosines and sines are solutions of the linear differential
Sinusoidal Steady-State Analysis
 Chapter 4 Sinusoidal Steady-State Analysis In this unit, we consider circuits in which the sources are sinusoidal in nature. The review section of this unit covers most of section 9.1 9.9 of the text.
Chapter 4 Sinusoidal Steady-State Analysis In this unit, we consider circuits in which the sources are sinusoidal in nature. The review section of this unit covers most of section 9.1 9.9 of the text.
09/29/2009 Reading: Hambley Chapter 5 and Appendix A
 EE40 Lec 10 Complex Numbers and Phasors Prof. Nathan Cheung 09/29/2009 Reading: Hambley Chapter 5 and Appendix A Slide 1 OUTLINE Phasors as notation for Sinusoids Arithmetic with Complex Numbers Complex
EE40 Lec 10 Complex Numbers and Phasors Prof. Nathan Cheung 09/29/2009 Reading: Hambley Chapter 5 and Appendix A Slide 1 OUTLINE Phasors as notation for Sinusoids Arithmetic with Complex Numbers Complex
Each of these functions represents a signal in terms of its spectral components in the frequency domain.
 N INTRODUCTION TO SPECTRL FUNCTIONS Revision B By Tom Irvine Email: tomirvine@aol.com March 3, 000 INTRODUCTION This tutorial presents the Fourier transform. It also discusses the power spectral density
N INTRODUCTION TO SPECTRL FUNCTIONS Revision B By Tom Irvine Email: tomirvine@aol.com March 3, 000 INTRODUCTION This tutorial presents the Fourier transform. It also discusses the power spectral density
MATHEMATICS FOR ENGINEERING TRIGONOMETRY TUTORIAL 3 PERIODIC FUNCTIONS
 MATHEMATICS FOR ENGINEERING TRIGONOMETRY TUTORIAL 3 PERIODIC FUNCTIONS This is the one of a series of basic tutorials in mathematics aimed at beginners or anyone wanting to refresh themselves on fundamentals.
MATHEMATICS FOR ENGINEERING TRIGONOMETRY TUTORIAL 3 PERIODIC FUNCTIONS This is the one of a series of basic tutorials in mathematics aimed at beginners or anyone wanting to refresh themselves on fundamentals.
Handout 11: AC circuit. AC generator
 Handout : AC circuit AC generator Figure compares the voltage across the directcurrent (DC) generator and that across the alternatingcurrent (AC) generator For DC generator, the voltage is constant For
Handout : AC circuit AC generator Figure compares the voltage across the directcurrent (DC) generator and that across the alternatingcurrent (AC) generator For DC generator, the voltage is constant For
EE292: Fundamentals of ECE
 EE292: Fundamentals of ECE Fall 2012 TTh 10:00-11:15 SEB 1242 Lecture 18 121025 http://www.ee.unlv.edu/~b1morris/ee292/ 2 Outline Review RMS Values Complex Numbers Phasors Complex Impedance Circuit Analysis
EE292: Fundamentals of ECE Fall 2012 TTh 10:00-11:15 SEB 1242 Lecture 18 121025 http://www.ee.unlv.edu/~b1morris/ee292/ 2 Outline Review RMS Values Complex Numbers Phasors Complex Impedance Circuit Analysis
Poles and Zeros in z-plane
 M58 Mixed Signal Processors page of 6 Poles and Zeros in z-plane z-plane Response of discrete-time system (i.e. digital filter at a particular frequency ω is determined by the distance between its poles
M58 Mixed Signal Processors page of 6 Poles and Zeros in z-plane z-plane Response of discrete-time system (i.e. digital filter at a particular frequency ω is determined by the distance between its poles
CIRCUIT ANALYSIS II. (AC Circuits)
") Will Moore MT & MT CIRCUIT ANALYSIS II (AC Circuits) Syllabus Complex impedance, power factor, frequency response of AC networks including Bode diagrams, second-order and resonant circuits, damping and
Will Moore MT & MT CIRCUIT ANALYSIS II (AC Circuits) Syllabus Complex impedance, power factor, frequency response of AC networks including Bode diagrams, second-order and resonant circuits, damping and
Down-Sampling (4B) Young Won Lim 11/15/12
 Young Won Lim 11/15/12") Down-Sampling (B) /5/ Copyright (c) 9,, Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version. or any later
Down-Sampling (B) /5/ Copyright (c) 9,, Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version. or any later
Date: 1 April (1) The only reference material you may use is one 8½x11 crib sheet and a calculator.
 The only reference material you may use is one 8½x11 crib sheet and a calculator.") PH1140: Oscillations and Waves Name: Solutions Conference: Date: 1 April 2005 EXAM #1: D2005 INSTRUCTIONS: (1) The only reference material you may use is one 8½x11 crib sheet and a calculator. (2) Show
PH1140: Oscillations and Waves Name: Solutions Conference: Date: 1 April 2005 EXAM #1: D2005 INSTRUCTIONS: (1) The only reference material you may use is one 8½x11 crib sheet and a calculator. (2) Show
EDEXCEL NATIONAL CERTIFICATE UNIT 28 FURTHER MATHEMATICS FOR TECHNICIANS OUTCOME 3 TUTORIAL 1 - TRIGONOMETRICAL GRAPHS
 EDEXCEL NATIONAL CERTIFICATE UNIT 28 FURTHER MATHEMATICS FOR TECHNICIANS OUTCOME 3 TUTORIAL 1 - TRIGONOMETRICAL GRAPHS CONTENTS 3 Be able to understand how to manipulate trigonometric expressions and apply
EDEXCEL NATIONAL CERTIFICATE UNIT 28 FURTHER MATHEMATICS FOR TECHNICIANS OUTCOME 3 TUTORIAL 1 - TRIGONOMETRICAL GRAPHS CONTENTS 3 Be able to understand how to manipulate trigonometric expressions and apply
Date: 31 March (1) The only reference material you may use is one 8½x11 crib sheet and a calculator.
 The only reference material you may use is one 8½x11 crib sheet and a calculator.") PH1140: Oscillations and Waves Name: SOLUTIONS AT END Conference: Date: 31 March 2005 EXAM #1: D2006 INSTRUCTIONS: (1) The only reference material you may use is one 8½x11 crib sheet and a calculator.
PH1140: Oscillations and Waves Name: SOLUTIONS AT END Conference: Date: 31 March 2005 EXAM #1: D2006 INSTRUCTIONS: (1) The only reference material you may use is one 8½x11 crib sheet and a calculator.
Phasors: Impedance and Circuit Anlysis. Phasors
 Phasors: Impedance and Circuit Anlysis Lecture 6, 0/07/05 OUTLINE Phasor ReCap Capacitor/Inductor Example Arithmetic with Complex Numbers Complex Impedance Circuit Analysis with Complex Impedance Phasor
Phasors: Impedance and Circuit Anlysis Lecture 6, 0/07/05 OUTLINE Phasor ReCap Capacitor/Inductor Example Arithmetic with Complex Numbers Complex Impedance Circuit Analysis with Complex Impedance Phasor
Sinusoids and Phasors
 CHAPTER 9 Sinusoids and Phasors We now begins the analysis of circuits in which the voltage or current sources are time-varying. In this chapter, we are particularly interested in sinusoidally time-varying
CHAPTER 9 Sinusoids and Phasors We now begins the analysis of circuits in which the voltage or current sources are time-varying. In this chapter, we are particularly interested in sinusoidally time-varying
CMPT 889: Lecture 2 Sinusoids, Complex Exponentials, Spectrum Representation
 CMPT 889: Lecture 2 Sinusoids, Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University September 26, 2005 1 Sinusoids Sinusoids
CMPT 889: Lecture 2 Sinusoids, Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University September 26, 2005 1 Sinusoids Sinusoids
Chapter 5 Frequency Domain Analysis of Systems
 Chapter 5 Frequency Domain Analysis of Systems CT, LTI Systems Consider the following CT LTI system: xt () ht () yt () Assumption: the impulse response h(t) is absolutely integrable, i.e., ht ( ) dt< (this
Chapter 5 Frequency Domain Analysis of Systems CT, LTI Systems Consider the following CT LTI system: xt () ht () yt () Assumption: the impulse response h(t) is absolutely integrable, i.e., ht ( ) dt< (this
Standing Waves If the same type of waves move through a common region and their frequencies, f, are the same then so are their wavelengths, λ.
 Standing Waves I the same type o waves move through a common region and their requencies,, are the same then so are their wavelengths,. This ollows rom: v=. Since the waves move through a common region,
Standing Waves I the same type o waves move through a common region and their requencies,, are the same then so are their wavelengths,. This ollows rom: v=. Since the waves move through a common region,
Review of 1 st Order Circuit Analysis
 ECEN 60 Circuits/Electronics Spring 007-7-07 P. Mathys Review of st Order Circuit Analysis First Order Differential Equation Consider the following circuit with input voltage v S (t) and output voltage
ECEN 60 Circuits/Electronics Spring 007-7-07 P. Mathys Review of st Order Circuit Analysis First Order Differential Equation Consider the following circuit with input voltage v S (t) and output voltage
Damped Oscillators (revisited)
") Damped Oscillators (revisited) We saw that damped oscillators can be modeled using a recursive filter with two coefficients and no feedforward components: Y(k) = - a(1)*y(k-1) - a(2)*y(k-2) We derived
Damped Oscillators (revisited) We saw that damped oscillators can be modeled using a recursive filter with two coefficients and no feedforward components: Y(k) = - a(1)*y(k-1) - a(2)*y(k-2) We derived
ENSC327 Communications Systems 2: Fourier Representations. School of Engineering Science Simon Fraser University
 ENSC37 Communications Systems : Fourier Representations School o Engineering Science Simon Fraser University Outline Chap..5: Signal Classiications Fourier Transorm Dirac Delta Function Unit Impulse Fourier
ENSC37 Communications Systems : Fourier Representations School o Engineering Science Simon Fraser University Outline Chap..5: Signal Classiications Fourier Transorm Dirac Delta Function Unit Impulse Fourier
Introduction to Vibration. Mike Brennan UNESP, Ilha Solteira São Paulo Brazil
 Introduction to Vibration Mike Brennan UNESP, Ilha Solteira São Paulo Brazil Vibration Most vibrations are undesirable, but there are many instances where vibrations are useful Ultrasonic (very high
Introduction to Vibration Mike Brennan UNESP, Ilha Solteira São Paulo Brazil Vibration Most vibrations are undesirable, but there are many instances where vibrations are useful Ultrasonic (very high
Phasor mathematics. Resources and methods for learning about these subjects (list a few here, in preparation for your research):
:") Phasor mathematics This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
Phasor mathematics This worksheet and all related files are licensed under the Creative Commons Attribution License, version 1.0. To view a copy of this license, visit http://creativecommons.org/licenses/by/1.0/,
d n 1 f dt n 1 + K+ a 0f = C cos(ωt + φ)
") Tutorial TUTOR: THE PHASOR TRANSFORM All voltages currents in linear circuits with sinusoidal sources are described by constant-coefficient linear differential equations of the form (1) a n d n f dt n
Tutorial TUTOR: THE PHASOR TRANSFORM All voltages currents in linear circuits with sinusoidal sources are described by constant-coefficient linear differential equations of the form (1) a n d n f dt n
CMPT 318: Lecture 5 Complex Exponentials, Spectrum Representation
 CMPT 318: Lecture 5 Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University January 23, 2006 1 Exponentials The exponential is
CMPT 318: Lecture 5 Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University January 23, 2006 1 Exponentials The exponential is
Sinusoids. Amplitude and Magnitude. Phase and Period. CMPT 889: Lecture 2 Sinusoids, Complex Exponentials, Spectrum Representation
 Sinusoids CMPT 889: Lecture Sinusoids, Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University September 6, 005 Sinusoids are
Sinusoids CMPT 889: Lecture Sinusoids, Complex Exponentials, Spectrum Representation Tamara Smyth, tamaras@cs.sfu.ca School of Computing Science, Simon Fraser University September 6, 005 Sinusoids are
Discrete-Time David Johns and Ken Martin University of Toronto
 Discrete-Time David Johns and Ken Martin University of Toronto (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) University of Toronto 1 of 40 Overview of Some Signal Spectra x c () t st () x s () t xn
Discrete-Time David Johns and Ken Martin University of Toronto (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) University of Toronto 1 of 40 Overview of Some Signal Spectra x c () t st () x s () t xn
EE100Su08 Lecture #11 (July 21 st 2008)
") EE100Su08 Lecture #11 (July 21 st 2008) Bureaucratic Stuff Lecture videos should be up by tonight HW #2: Pick up from office hours today, will leave them in lab. REGRADE DEADLINE: Monday, July 28 th 2008,
EE100Su08 Lecture #11 (July 21 st 2008) Bureaucratic Stuff Lecture videos should be up by tonight HW #2: Pick up from office hours today, will leave them in lab. REGRADE DEADLINE: Monday, July 28 th 2008,
Chapter 4 Discrete Fourier Transform (DFT) And Signal Spectrum
 And Signal Spectrum") Chapter 4 Discrete Fourier Transform (DFT) And Signal Spectrum CEN352, DR. Nassim Ammour, King Saud University 1 Fourier Transform History Born 21 March 1768 ( Auxerre ). Died 16 May 1830 ( Paris ) French
Chapter 4 Discrete Fourier Transform (DFT) And Signal Spectrum CEN352, DR. Nassim Ammour, King Saud University 1 Fourier Transform History Born 21 March 1768 ( Auxerre ). Died 16 May 1830 ( Paris ) French
Multimedia Signals and Systems - Audio and Video. Signal, Image, Video Processing Review-Introduction, MP3 and MPEG2
 Multimedia Signals and Systems - Audio and Video Signal, Image, Video Processing Review-Introduction, MP3 and MPEG2 Kunio Takaya Electrical and Computer Engineering University of Saskatchewan December
Multimedia Signals and Systems - Audio and Video Signal, Image, Video Processing Review-Introduction, MP3 and MPEG2 Kunio Takaya Electrical and Computer Engineering University of Saskatchewan December
Up-Sampling (5B) Young Won Lim 11/15/12
 Young Won Lim 11/15/12") Up-Sampling (5B) Copyright (c) 9,, Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version. or any later version
Up-Sampling (5B) Copyright (c) 9,, Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version. or any later version
Control for. Maarten Steinbuch Dept. Mechanical Engineering Control Systems Technology Group TU/e
 Control for Maarten Steinbuch Dept. Mechanical Engineering Control Systems Technology Group TU/e Motion Systems m F Introduction Timedomain tuning Frequency domain & stability Filters Feedforward Servo-oriented
Control for Maarten Steinbuch Dept. Mechanical Engineering Control Systems Technology Group TU/e Motion Systems m F Introduction Timedomain tuning Frequency domain & stability Filters Feedforward Servo-oriented
Digital Signal Processing
 Digital Signal Processing Introduction Moslem Amiri, Václav Přenosil Embedded Systems Laboratory Faculty of Informatics, Masaryk University Brno, Czech Republic amiri@mail.muni.cz prenosil@fi.muni.cz February
Digital Signal Processing Introduction Moslem Amiri, Václav Přenosil Embedded Systems Laboratory Faculty of Informatics, Masaryk University Brno, Czech Republic amiri@mail.muni.cz prenosil@fi.muni.cz February
Phase-error Correction by Single-phase Phase-Locked Loops based on Transfer Delay
 Global Summit on Electronics and Electrical Engineering Valencia - Spain Phase-error Correction by Single-phase Phase-Locked Loops based on Transfer Delay Main research Project: Distributed Harmonics Compensation
Global Summit on Electronics and Electrical Engineering Valencia - Spain Phase-error Correction by Single-phase Phase-Locked Loops based on Transfer Delay Main research Project: Distributed Harmonics Compensation
CHAPTER 4 FOURIER SERIES S A B A R I N A I S M A I L
 CHAPTER 4 FOURIER SERIES 1 S A B A R I N A I S M A I L Outline Introduction of the Fourier series. The properties of the Fourier series. Symmetry consideration Application of the Fourier series to circuit
CHAPTER 4 FOURIER SERIES 1 S A B A R I N A I S M A I L Outline Introduction of the Fourier series. The properties of the Fourier series. Symmetry consideration Application of the Fourier series to circuit
ω 0 = 2π/T 0 is called the fundamental angular frequency and ω 2 = 2ω 0 is called the
 he ime-frequency Concept []. Review of Fourier Series Consider the following set of time functions {3A sin t, A sin t}. We can represent these functions in different ways by plotting the amplitude versus
he ime-frequency Concept []. Review of Fourier Series Consider the following set of time functions {3A sin t, A sin t}. We can represent these functions in different ways by plotting the amplitude versus
Simple harmonic motion the motion of springs is a very important topic in physics.
 Chapter 11 Potential and Kinetic Energy Together: Simple Harmonic Motion In This Chapter Using Hooke s law Working with simple harmonic motion Calculating simple harmonic motion velcoity Finding simple
Chapter 11 Potential and Kinetic Energy Together: Simple Harmonic Motion In This Chapter Using Hooke s law Working with simple harmonic motion Calculating simple harmonic motion velcoity Finding simple
Frequency Dependent Aspects of Op-amps
 Frequency Dependent Aspects of Op-amps Frequency dependent feedback circuits The arguments that lead to expressions describing the circuit gain of inverting and non-inverting amplifier circuits with resistive
Frequency Dependent Aspects of Op-amps Frequency dependent feedback circuits The arguments that lead to expressions describing the circuit gain of inverting and non-inverting amplifier circuits with resistive
2 Frequency-Domain Analysis
 2 requency-domain Analysis Electrical engineers live in the two worlds, so to speak, of time and frequency. requency-domain analysis is an extremely valuable tool to the communications engineer, more so
2 requency-domain Analysis Electrical engineers live in the two worlds, so to speak, of time and frequency. requency-domain analysis is an extremely valuable tool to the communications engineer, more so
Dynamic circuits: Frequency domain analysis
 Electronic Circuits 1 Dynamic circuits: Contents Free oscillation and natural frequency Transfer functions Frequency response Bode plots 1 System behaviour: overview 2 System behaviour : review solution
Electronic Circuits 1 Dynamic circuits: Contents Free oscillation and natural frequency Transfer functions Frequency response Bode plots 1 System behaviour: overview 2 System behaviour : review solution
Down-Sampling (4B) Young Won Lim 10/25/12
 Young Won Lim 10/25/12") Down-Sampling (4B) /5/ Copyright (c) 9,, Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version. or any later
Down-Sampling (4B) /5/ Copyright (c) 9,, Young W. Lim. Permission is granted to copy, distribute and/or modify this document under the terms of the GNU Free Documentation License, Version. or any later
OSE801 Engineering System Identification. Lecture 05: Fourier Analysis
 OSE81 Engineering System Identification Lecture 5: Fourier Analysis What we will study in this lecture: A short introduction of Fourier analysis Sampling the data Applications Example 1 Fourier Analysis
OSE81 Engineering System Identification Lecture 5: Fourier Analysis What we will study in this lecture: A short introduction of Fourier analysis Sampling the data Applications Example 1 Fourier Analysis
Lecture 9: Space-Vector Models
 1 / 30 Lecture 9: Space-Vector Models ELEC-E8405 Electric Drives (5 ECTS) Marko Hinkkanen Autumn 2017 2 / 30 Learning Outcomes After this lecture and exercises you will be able to: Include the number of
1 / 30 Lecture 9: Space-Vector Models ELEC-E8405 Electric Drives (5 ECTS) Marko Hinkkanen Autumn 2017 2 / 30 Learning Outcomes After this lecture and exercises you will be able to: Include the number of
Chapter 10: Sinusoids and Phasors
 Chapter 10: Sinusoids and Phasors 1. Motivation 2. Sinusoid Features 3. Phasors 4. Phasor Relationships for Circuit Elements 5. Impedance and Admittance 6. Kirchhoff s Laws in the Frequency Domain 7. Impedance
Chapter 10: Sinusoids and Phasors 1. Motivation 2. Sinusoid Features 3. Phasors 4. Phasor Relationships for Circuit Elements 5. Impedance and Admittance 6. Kirchhoff s Laws in the Frequency Domain 7. Impedance
A system that is both linear and time-invariant is called linear time-invariant (LTI).
.") The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
The Cooper Union Department of Electrical Engineering ECE111 Signal Processing & Systems Analysis Lecture Notes: Time, Frequency & Transform Domains February 28, 2012 Signals & Systems Signals are mapped
THE FOURIER TRANSFORM (Fourier series for a function whose period is very, very long) Reading: Main 11.3
 Reading: Main 11.3") THE FOURIER TRANSFORM (Fourier series for a function whose period is very, very long) Reading: Main 11.3 Any periodic function f(t) can be written as a Fourier Series a 0 2 + a n cos( nωt) + b n sin n
THE FOURIER TRANSFORM (Fourier series for a function whose period is very, very long) Reading: Main 11.3 Any periodic function f(t) can be written as a Fourier Series a 0 2 + a n cos( nωt) + b n sin n
Name (print): Lab (circle): W8 Th8 Th11 Th2 F8. θ (radians) θ (degrees) cos θ sin θ π/ /2 1/2 π/4 45 2/2 2/2 π/3 60 1/2 3/2 π/
: Lab (circle): W8 Th8 Th11 Th2 F8. θ (radians) θ (degrees) cos θ sin θ π/ /2 1/2 π/4 45 2/2 2/2 π/3 60 1/2 3/2 π/") Name (print): Lab (circle): W8 Th8 Th11 Th2 F8 Trigonometric Identities ( cos(θ) = cos(θ) sin(θ) = sin(θ) sin(θ) = cos θ π ) 2 Cosines and Sines of common angles Euler s Formula θ (radians) θ (degrees)
Name (print): Lab (circle): W8 Th8 Th11 Th2 F8 Trigonometric Identities ( cos(θ) = cos(θ) sin(θ) = sin(θ) sin(θ) = cos θ π ) 2 Cosines and Sines of common angles Euler s Formula θ (radians) θ (degrees)
Circuits and Systems I
 Circuits and Systems I LECTURE #2 Phasor Addition lions@epfl Prof. Dr. Volkan Cevher LIONS/Laboratory for Information and Inference Systems License Info for SPFirst Slides This work released under a Creative
Circuits and Systems I LECTURE #2 Phasor Addition lions@epfl Prof. Dr. Volkan Cevher LIONS/Laboratory for Information and Inference Systems License Info for SPFirst Slides This work released under a Creative
Discrete-Time Signals: Time-Domain Representation
 Discrete-Time Signals: Time-Domain Representation 1 Signals represented as sequences of numbers, called samples Sample value of a typical signal or sequence denoted as x[n] with n being an integer in the
Discrete-Time Signals: Time-Domain Representation 1 Signals represented as sequences of numbers, called samples Sample value of a typical signal or sequence denoted as x[n] with n being an integer in the
Chapter 5 Frequency Domain Analysis of Systems
 Chapter 5 Frequency Domain Analysis of Systems CT, LTI Systems Consider the following CT LTI system: xt () ht () yt () Assumption: the impulse response h(t) is absolutely integrable, i.e., ht ( ) dt< (this
Chapter 5 Frequency Domain Analysis of Systems CT, LTI Systems Consider the following CT LTI system: xt () ht () yt () Assumption: the impulse response h(t) is absolutely integrable, i.e., ht ( ) dt< (this
Chapter 3 Mathematical Methods
 Chapter 3 Mathematical Methods Slides to accompany lectures in Vibro-Acoustic Design in Mechanical Systems 0 by D. W. Herrin Department of Mechanical Engineering Lexington, KY 40506-0503 Tel: 859-8-0609
Chapter 3 Mathematical Methods Slides to accompany lectures in Vibro-Acoustic Design in Mechanical Systems 0 by D. W. Herrin Department of Mechanical Engineering Lexington, KY 40506-0503 Tel: 859-8-0609
DCSP-2: Fourier Transform
 DCSP-2: Fourier Transform Jianfeng Feng Department of Computer Science Warwick Univ., UK Jianfeng.feng@warwick.ac.uk http://www.dcs.warwick.ac.uk/~feng/dcsp.html Data transmission Channel characteristics,
DCSP-2: Fourier Transform Jianfeng Feng Department of Computer Science Warwick Univ., UK Jianfeng.feng@warwick.ac.uk http://www.dcs.warwick.ac.uk/~feng/dcsp.html Data transmission Channel characteristics,
Introduction to Vibration. Professor Mike Brennan
 Introduction to Vibration Professor Mie Brennan Introduction to Vibration Nature of vibration of mechanical systems Free and forced vibrations Frequency response functions Fundamentals For free vibration
Introduction to Vibration Professor Mie Brennan Introduction to Vibration Nature of vibration of mechanical systems Free and forced vibrations Frequency response functions Fundamentals For free vibration
MEDE2500 Tutorial Nov-7
 (updated 2016-Nov-4,7:40pm) MEDE2500 (2016-2017) Tutorial 3 MEDE2500 Tutorial 3 2016-Nov-7 Content 1. The Dirac Delta Function, singularity functions, even and odd functions 2. The sampling process and
(updated 2016-Nov-4,7:40pm) MEDE2500 (2016-2017) Tutorial 3 MEDE2500 Tutorial 3 2016-Nov-7 Content 1. The Dirac Delta Function, singularity functions, even and odd functions 2. The sampling process and
 Fourier Transforms For additional information, see the classic book The Fourier Transform and its Applications by Ronald N. Bracewell (which is on the shelves of most radio astronomers) and the Wikipedia
Fourier Transforms For additional information, see the classic book The Fourier Transform and its Applications by Ronald N. Bracewell (which is on the shelves of most radio astronomers) and the Wikipedia
Discrete Fourier Transform
 Discrete Fourier Transform Valentina Hubeika, Jan Černocký DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz Diskrete Fourier transform (DFT) We have just one problem with DFS that needs to be solved.
Discrete Fourier Transform Valentina Hubeika, Jan Černocký DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz Diskrete Fourier transform (DFT) We have just one problem with DFS that needs to be solved.
ENSC327 Communications Systems 2: Fourier Representations. Jie Liang School of Engineering Science Simon Fraser University
 ENSC327 Communications Systems 2: Fourier Representations Jie Liang School of Engineering Science Simon Fraser University 1 Outline Chap 2.1 2.5: Signal Classifications Fourier Transform Dirac Delta Function
ENSC327 Communications Systems 2: Fourier Representations Jie Liang School of Engineering Science Simon Fraser University 1 Outline Chap 2.1 2.5: Signal Classifications Fourier Transform Dirac Delta Function
R-L-C Circuits and Resonant Circuits
 P517/617 Lec4, P1 R-L-C Circuits and Resonant Circuits Consider the following RLC series circuit What's R? Simplest way to solve for is to use voltage divider equation in complex notation. X L X C in 0
P517/617 Lec4, P1 R-L-C Circuits and Resonant Circuits Consider the following RLC series circuit What's R? Simplest way to solve for is to use voltage divider equation in complex notation. X L X C in 0
summable Necessary and sufficient for BIBO stability of an LTI system. Also see poles.
 EECS 206 DSP GLOSSARY c Andrew E. Yagle Fall 2005 absolutely impulse response: h[n] is finite. EX: n=0 ( 3 4 )n = 1 = 4 but 1 3 n=1 1 n. 4 summable Necessary and sufficient for BIBO stability of an LI
EECS 206 DSP GLOSSARY c Andrew E. Yagle Fall 2005 absolutely impulse response: h[n] is finite. EX: n=0 ( 3 4 )n = 1 = 4 but 1 3 n=1 1 n. 4 summable Necessary and sufficient for BIBO stability of an LI
Order Tracking Analysis
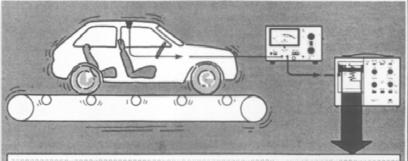
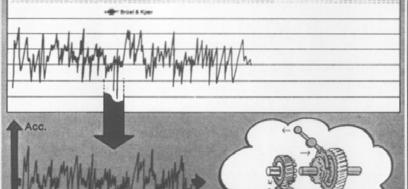
 1. Introduction Order Tracking Analysis Jaafar Alsalaet College of Engineering-University of Basrah Mostly, dynamic forces excited in a machine are related to the rotation speed; hence, it is often preferred
1. Introduction Order Tracking Analysis Jaafar Alsalaet College of Engineering-University of Basrah Mostly, dynamic forces excited in a machine are related to the rotation speed; hence, it is often preferred
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Filtering in the Frequency Domain http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background
For a rigid body that is constrained to rotate about a fixed axis, the gravitational torque about the axis is
 Experiment 14 The Physical Pendulum The period of oscillation of a physical pendulum is found to a high degree of accuracy by two methods: theory and experiment. The values are then compared. Theory For
Experiment 14 The Physical Pendulum The period of oscillation of a physical pendulum is found to a high degree of accuracy by two methods: theory and experiment. The values are then compared. Theory For
Discrete-Time Signals: Time-Domain Representation
 Discrete-Time Signals: Time-Domain Representation 1 Signals represented as sequences of numbers, called samples Sample value of a typical signal or sequence denoted as x[n] with n being an integer in the
Discrete-Time Signals: Time-Domain Representation 1 Signals represented as sequences of numbers, called samples Sample value of a typical signal or sequence denoted as x[n] with n being an integer in the
Discrete Time Systems
 Discrete Time Systems Valentina Hubeika, Jan Černocký DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz 1 LTI systems In this course, we work only with linear and time-invariant systems. We talked about
Discrete Time Systems Valentina Hubeika, Jan Černocký DCGM FIT BUT Brno, {ihubeika,cernocky}@fit.vutbr.cz 1 LTI systems In this course, we work only with linear and time-invariant systems. We talked about
Unstable Oscillations!
 Unstable Oscillations X( t ) = [ A 0 + A( t ) ] sin( ω t + Φ 0 + Φ( t ) ) Amplitude modulation: A( t ) Phase modulation: Φ( t ) S(ω) S(ω) Special case: C(ω) Unstable oscillation has a broader periodogram
Unstable Oscillations X( t ) = [ A 0 + A( t ) ] sin( ω t + Φ 0 + Φ( t ) ) Amplitude modulation: A( t ) Phase modulation: Φ( t ) S(ω) S(ω) Special case: C(ω) Unstable oscillation has a broader periodogram
Grades will be determined by the correctness of your answers (explanations are not required).
.") 6.00 (Fall 2011) Final Examination December 19, 2011 Name: Kerberos Username: Please circle your section number: Section Time 2 11 am 1 pm 4 2 pm Grades will be determined by the correctness of your answers
6.00 (Fall 2011) Final Examination December 19, 2011 Name: Kerberos Username: Please circle your section number: Section Time 2 11 am 1 pm 4 2 pm Grades will be determined by the correctness of your answers
EE40 Lecture 11 Josh Hug 7/19/2010
 EE40 Lecture Josh 7/9/200 Logistical Things Lab 4 tomorrow Lab 5 (active filter lab) on Wednesday Prototype for future lab for EE40 Prelab is very short, sorry. Please give us our feedback Google docs
EE40 Lecture Josh 7/9/200 Logistical Things Lab 4 tomorrow Lab 5 (active filter lab) on Wednesday Prototype for future lab for EE40 Prelab is very short, sorry. Please give us our feedback Google docs
Bridge between continuous time and discrete time signals
 6 Sampling Bridge between continuous time and discrete time signals Sampling theorem complete representation of a continuous time signal by its samples Samplingandreconstruction implementcontinuous timesystems
6 Sampling Bridge between continuous time and discrete time signals Sampling theorem complete representation of a continuous time signal by its samples Samplingandreconstruction implementcontinuous timesystems
Solutions to Problems in Chapter 4
 Solutions to Problems in Chapter 4 Problems with Solutions Problem 4. Fourier Series of the Output Voltage of an Ideal Full-Wave Diode Bridge Rectifier he nonlinear circuit in Figure 4. is a full-wave
Solutions to Problems in Chapter 4 Problems with Solutions Problem 4. Fourier Series of the Output Voltage of an Ideal Full-Wave Diode Bridge Rectifier he nonlinear circuit in Figure 4. is a full-wave
I. Signals & Sinusoids
 I. Signals & Sinusoids [p. 3] Signal definition Sinusoidal signal Plotting a sinusoid [p. 12] Signal operations Time shifting Time scaling Time reversal Combining time shifting & scaling [p. 17] Trigonometric
I. Signals & Sinusoids [p. 3] Signal definition Sinusoidal signal Plotting a sinusoid [p. 12] Signal operations Time shifting Time scaling Time reversal Combining time shifting & scaling [p. 17] Trigonometric
Correlator I. Basics. Chapter Introduction. 8.2 Digitization Sampling. D. Anish Roshi
 Chapter 8 Correlator I. Basics D. Anish Roshi 8.1 Introduction A radio interferometer measures the mutual coherence function of the electric field due to a given source brightness distribution in the sky.
Chapter 8 Correlator I. Basics D. Anish Roshi 8.1 Introduction A radio interferometer measures the mutual coherence function of the electric field due to a given source brightness distribution in the sky.
26. The Fourier Transform in optics
 26. The Fourier Transform in optics What is the Fourier Transform? Anharmonic waves The spectrum of a light wave Fourier transform of an exponential The Dirac delta function The Fourier transform of e
26. The Fourier Transform in optics What is the Fourier Transform? Anharmonic waves The spectrum of a light wave Fourier transform of an exponential The Dirac delta function The Fourier transform of e
2.3 Oscillation. The harmonic oscillator equation is the differential equation. d 2 y dt 2 r y (r > 0). Its solutions have the form
. Its solutions have the form") 2. Oscillation So far, we have used differential equations to describe functions that grow or decay over time. The next most common behavior for a function is to oscillate, meaning that it increases and
2. Oscillation So far, we have used differential equations to describe functions that grow or decay over time. The next most common behavior for a function is to oscillate, meaning that it increases and
PREMED COURSE, 14/08/2015 OSCILLATIONS
 PREMED COURSE, 14/08/2015 OSCILLATIONS PERIODIC MOTIONS Mechanical Metronom Laser Optical Bunjee jumping Electrical Astronomical Pulsar Biological ECG AC 50 Hz Another biological exampe PERIODIC MOTIONS
PREMED COURSE, 14/08/2015 OSCILLATIONS PERIODIC MOTIONS Mechanical Metronom Laser Optical Bunjee jumping Electrical Astronomical Pulsar Biological ECG AC 50 Hz Another biological exampe PERIODIC MOTIONS
Lecture 1a. Complex numbers, phasors and vectors. Introduction. Complex numbers. 1a.1
 1a.1 Lecture 1a Comple numbers, phasors and vectors Introduction This course will require ou to appl several concepts ou learned in our undergraduate math courses. In some cases, such as comple numbers
1a.1 Lecture 1a Comple numbers, phasors and vectors Introduction This course will require ou to appl several concepts ou learned in our undergraduate math courses. In some cases, such as comple numbers
Circuit Analysis-III. Circuit Analysis-II Lecture # 3 Friday 06 th April, 18
 Circuit Analysis-III Sinusoids Example #1 ü Find the amplitude, phase, period and frequency of the sinusoid: v (t ) =12cos(50t +10 ) Signal Conversion ü From sine to cosine and vice versa. ü sin (A ± B)
Circuit Analysis-III Sinusoids Example #1 ü Find the amplitude, phase, period and frequency of the sinusoid: v (t ) =12cos(50t +10 ) Signal Conversion ü From sine to cosine and vice versa. ü sin (A ± B)
SCHOOL OF MATHEMATICS MATHEMATICS FOR PART I ENGINEERING. Self-paced Course
 SCHOOL OF MATHEMATICS MATHEMATICS FOR PART I ENGINEERING Self-paced Course MODULE 26 APPLICATIONS TO ELECTRICAL CIRCUITS Module Topics 1. Complex numbers and alternating currents 2. Complex impedance 3.
SCHOOL OF MATHEMATICS MATHEMATICS FOR PART I ENGINEERING Self-paced Course MODULE 26 APPLICATIONS TO ELECTRICAL CIRCUITS Module Topics 1. Complex numbers and alternating currents 2. Complex impedance 3.
The Hilbert Transform
 The Hilbert Transform David Hilbert 1 ABSTRACT: In this presentation, the basic theoretical background of the Hilbert Transform is introduced. Using this transform, normal real-valued time domain functions
The Hilbert Transform David Hilbert 1 ABSTRACT: In this presentation, the basic theoretical background of the Hilbert Transform is introduced. Using this transform, normal real-valued time domain functions
Music 270a: Complex Exponentials and Spectrum Representation
 Music 270a: Complex Exponentials and Spectrum Representation Tamara Smyth, trsmyth@ucsd.edu Department of Music, University of California, San Diego (UCSD) October 24, 2016 1 Exponentials The exponential
Music 270a: Complex Exponentials and Spectrum Representation Tamara Smyth, trsmyth@ucsd.edu Department of Music, University of California, San Diego (UCSD) October 24, 2016 1 Exponentials The exponential
SHOCK AND VIBRATION RESPONSE SPECTRA COURSE Unit 6A. The Fourier Transform. By Tom Irvine
 SHOCK ND VIBRTION RESPONSE SPECTR COURSE Unit 6. The Fourier Transform By Tom Irvine Introduction Stationary vibration signals can be placed along a continuum in terms of the their qualitative characteristics.
SHOCK ND VIBRTION RESPONSE SPECTR COURSE Unit 6. The Fourier Transform By Tom Irvine Introduction Stationary vibration signals can be placed along a continuum in terms of the their qualitative characteristics.
Oversampling Converters
 Oversampling Converters David Johns and Ken Martin (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) slide 1 of 56 Motivation Popular approach for medium-to-low speed A/D and D/A applications requiring
Oversampling Converters David Johns and Ken Martin (johns@eecg.toronto.edu) (martin@eecg.toronto.edu) slide 1 of 56 Motivation Popular approach for medium-to-low speed A/D and D/A applications requiring
Robotics I. Figure 1: Initial placement of a rigid thin rod of length L in an absolute reference frame.
 Robotics I September, 7 Exercise Consider the rigid body in Fig., a thin rod of length L. The rod will be rotated by an angle α around the z axis, then by an angle β around the resulting x axis, and finally
Robotics I September, 7 Exercise Consider the rigid body in Fig., a thin rod of length L. The rod will be rotated by an angle α around the z axis, then by an angle β around the resulting x axis, and finally
SEISMIC WAVE PROPAGATION. Lecture 2: Fourier Analysis
 SEISMIC WAVE PROPAGATION Lecture 2: Fourier Analysis Fourier Series & Fourier Transforms Fourier Series Review of trigonometric identities Analysing the square wave Fourier Transform Transforms of some
SEISMIC WAVE PROPAGATION Lecture 2: Fourier Analysis Fourier Series & Fourier Transforms Fourier Series Review of trigonometric identities Analysing the square wave Fourier Transform Transforms of some
Figure 3.1 Effect on frequency spectrum of increasing period T 0. Consider the amplitude spectrum of a periodic waveform as shown in Figure 3.2.
 3. Fourier ransorm From Fourier Series to Fourier ransorm [, 2] In communication systems, we oten deal with non-periodic signals. An extension o the time-requency relationship to a non-periodic signal
3. Fourier ransorm From Fourier Series to Fourier ransorm [, 2] In communication systems, we oten deal with non-periodic signals. An extension o the time-requency relationship to a non-periodic signal
MAE 143B - Homework 9
 MAE 143B - Homework 9 7.1 a) We have stable first-order poles at p 1 = 1 and p 2 = 1. For small values of ω, we recover the DC gain K = lim ω G(jω) = 1 1 = 2dB. Having this finite limit, our straight-line
MAE 143B - Homework 9 7.1 a) We have stable first-order poles at p 1 = 1 and p 2 = 1. For small values of ω, we recover the DC gain K = lim ω G(jω) = 1 1 = 2dB. Having this finite limit, our straight-line
Slide 1 / 70. Simple Harmonic Motion
 Slide 1 / 70 Simple Harmonic Motion Slide 2 / 70 SHM and Circular Motion There is a deep connection between Simple Harmonic Motion (SHM) and Uniform Circular Motion (UCM). Simple Harmonic Motion can be
Slide 1 / 70 Simple Harmonic Motion Slide 2 / 70 SHM and Circular Motion There is a deep connection between Simple Harmonic Motion (SHM) and Uniform Circular Motion (UCM). Simple Harmonic Motion can be
ESE 531: Digital Signal Processing
 ESE 531: Digital Signal Processing Lec 8: February 12th, 2019 Sampling and Reconstruction Lecture Outline! Review " Ideal sampling " Frequency response of sampled signal " Reconstruction " Anti-aliasing
ESE 531: Digital Signal Processing Lec 8: February 12th, 2019 Sampling and Reconstruction Lecture Outline! Review " Ideal sampling " Frequency response of sampled signal " Reconstruction " Anti-aliasing
A3. Frequency Representation of Continuous Time and Discrete Time Signals
 A3. Frequency Representation of Continuous Time and Discrete Time Signals Objectives Define the magnitude and phase plots of continuous time sinusoidal signals Extend the magnitude and phase plots to discrete
A3. Frequency Representation of Continuous Time and Discrete Time Signals Objectives Define the magnitude and phase plots of continuous time sinusoidal signals Extend the magnitude and phase plots to discrete
Alternating Current (AC) Circuits
 Circuits") Alternating Current (AC) Circuits We have been talking about DC circuits Constant currents and voltages Resistors Linear equations Now we introduce AC circuits Time-varying currents and voltages Resistors,
Alternating Current (AC) Circuits We have been talking about DC circuits Constant currents and voltages Resistors Linear equations Now we introduce AC circuits Time-varying currents and voltages Resistors,
The Fourier Transform (and more )
") The Fourier Transform (and more ) imrod Peleg ov. 5 Outline Introduce Fourier series and transforms Introduce Discrete Time Fourier Transforms, (DTFT) Introduce Discrete Fourier Transforms (DFT) Consider
The Fourier Transform (and more ) imrod Peleg ov. 5 Outline Introduce Fourier series and transforms Introduce Discrete Time Fourier Transforms, (DTFT) Introduce Discrete Fourier Transforms (DFT) Consider
NMR course at the FMP: Practical aspects
 NMR course at the FMP: Practical aspects 04.05.2009 The program 2/68 The dynamic range Solvent supression Quadrature detection Folding/Aliasing Phasing in the indirect dimensions 3/68 The dynamic range
NMR course at the FMP: Practical aspects 04.05.2009 The program 2/68 The dynamic range Solvent supression Quadrature detection Folding/Aliasing Phasing in the indirect dimensions 3/68 The dynamic range
Solutions to ECE 2026 Problem Set #1. 2.5e j0.46
 Solutions to ECE 2026 Problem Set #1 PROBLEM 1.1.* Convert the following to polar form: (a) z 3 + 4j 3 2 + 4 2 e jtan 1 ( 4/3) 5e j0.295 3 4j 5e (b) z ---------------- ------------------------ j0.295 3
Solutions to ECE 2026 Problem Set #1 PROBLEM 1.1.* Convert the following to polar form: (a) z 3 + 4j 3 2 + 4 2 e jtan 1 ( 4/3) 5e j0.295 3 4j 5e (b) z ---------------- ------------------------ j0.295 3
EDEXCEL NATIONAL CERTIFICATE UNIT 28 FURTHER MATHEMATICS FOR TECHNICIANS OUTCOME 2- ALGEBRAIC TECHNIQUES TUTORIAL 2 - COMPLEX NUMBERS
 EDEXCEL NATIONAL CERTIFICATE UNIT 8 FURTHER MATHEMATICS FOR TECHNICIANS OUTCOME - ALGEBRAIC TECHNIQUES TUTORIAL - COMPLEX NUMBERS CONTENTS Be able to apply algebraic techniques Arithmetic progression (AP):
EDEXCEL NATIONAL CERTIFICATE UNIT 8 FURTHER MATHEMATICS FOR TECHNICIANS OUTCOME - ALGEBRAIC TECHNIQUES TUTORIAL - COMPLEX NUMBERS CONTENTS Be able to apply algebraic techniques Arithmetic progression (AP):
Lecture 4: R-L-C Circuits and Resonant Circuits
 Lecture 4: R-L-C Circuits and Resonant Circuits RLC series circuit: What's V R? Simplest way to solve for V is to use voltage divider equation in complex notation: V X L X C V R = in R R + X C + X L L
Lecture 4: R-L-C Circuits and Resonant Circuits RLC series circuit: What's V R? Simplest way to solve for V is to use voltage divider equation in complex notation: V X L X C V R = in R R + X C + X L L
Complex Numbers, Phasors and Circuits
 Complex Numbers, Phasors and Circuits Transmission Lines Complex numbers are defined by points or vectors in the complex plane, and can be represented in Cartesian coordinates or in polar (exponential)
Complex Numbers, Phasors and Circuits Transmission Lines Complex numbers are defined by points or vectors in the complex plane, and can be represented in Cartesian coordinates or in polar (exponential)
BME 50500: Image and Signal Processing in Biomedicine. Lecture 2: Discrete Fourier Transform CCNY
 1 Lucas Parra, CCNY BME 50500: Image and Signal Processing in Biomedicine Lecture 2: Discrete Fourier Transform Lucas C. Parra Biomedical Engineering Department CCNY http://bme.ccny.cuny.edu/faculty/parra/teaching/signal-and-image/
1 Lucas Parra, CCNY BME 50500: Image and Signal Processing in Biomedicine Lecture 2: Discrete Fourier Transform Lucas C. Parra Biomedical Engineering Department CCNY http://bme.ccny.cuny.edu/faculty/parra/teaching/signal-and-image/
Physics 1C. Lecture 13B
 Physics 1C Lecture 13B Speed of Sound! Example values (m/s): Description of a Sound Wave! A sound wave may be considered either a displacement wave or a pressure wave! The displacement of a small element
Physics 1C Lecture 13B Speed of Sound! Example values (m/s): Description of a Sound Wave! A sound wave may be considered either a displacement wave or a pressure wave! The displacement of a small element
Revision of Basic A.C. Theory
 Revision of Basic A.C. Theory 1 Revision of Basic AC Theory (Much of this material has come from Electrical & Electronic Principles & Technology by John Bird) Electricity is generated in power stations
Revision of Basic A.C. Theory 1 Revision of Basic AC Theory (Much of this material has come from Electrical & Electronic Principles & Technology by John Bird) Electricity is generated in power stations