System models. We look at LTI systems for the time being Time domain models
|
|
|
- Georgiana Chase
- 6 years ago
- Views:
Transcription
1 Stem moel We look at LTI tem for the time being Time omain moel High orer orinar ifferential equation moel Contain onl input variable, output variable, their erivative, an contant parameter Proper: highet output erivative orer i greatet Highet orer erivative of output tem orer n t n a n b m m n t n a t m u b t u b 0u t a 0
2 Stem moel Time omain moel State pace moel: tate equation output equation State equation: a et of t orer iff eq on tate variable Output equation: output a function of tate an input! " Linear tem:! " f (,u g(,u A Bu C Du
3 u a t a t a t n n n n n 0 ODE moel to State pace moel Let,, 3,... Then, 3, 3 4,... t n! " $ % a 0 a a a n! " $ % n! " $ % 0 0! " $ % u [ ] [0]u
4 u z a z t a z t a z t z b z t b z t b u b u t b u t b a t a t a t n n n n n m m m m m m n n n n n Then : Let When : ODE moel to State pace moel m<n
5 ODE moel to State pace moel Let z, z, 3 z,... We till have the ame tate equation:! $! t " a n % " 0 a a a n But the output equation will be: m b m t z b m t z b z 0 b m m b b 0 [ b 0 b... b m ] [0]u $! % " n $! % " 0 0 $ u %
6 The eigenfunction φ k (t an their propertie (Focu on CT tem now, but reult appl to DT tem a well. eigenvalue eigenfunction Eigenfunction in ame function out with a gain From the uperpoition propert of LTI tem: Now the tak of fining repone of LTI tem i to etermine λ k. The olution i imple, general, an inightful. 6
7 that work for an an all Comple Eponential are the onl Eigenfunction of an LTI Stem eigenvalue eigenfunction eigenvalue eigenfunction
8 DT: 8
9 Tranfer Function 9
10 Tranfer Function Tranfer function from to i the gain from X( to Y(, that i, it i the ratio of Laplace tranform of to Laplace tranform of : [ ] Y ( X( L (t L (t [ ] Δ H(, or G(, Then: Y ( H(X(
11 Input Output Stem Input (t H( Output (t Y( H(X( If the input (t δ(t, the output i calle the impule repone. If the input (t u(t, the output i calle the tep repone. If the input (t Ain(ωt, an H( i table, output tea tate i A H(jω in(ωt H(jω Pole: value of at which TF à infinit Zero: value of at which TF 0
12 Eample: controller E( controller C( U( Proportional controller: C( K P cont Integral controller: C( K I / Derivative controller: C( K D PI controller: C( K P K I / PD controller: C( K P K D PID controller: C( K P K I / K D
13 State pace moel to TF ( ] ( [ ( ( ( ( ( ( ( ( ( ( ( ( ( : take State pace moel: ( D U B A SI C Y BU A SI X BU X A SI DU CX Y BU AX X Du C Bu A H L A, B, C, D are matrice
14 Block iagram computaon - CONTROLLER CONTROLLED DEVICE FEEDBACK ELEMENT
15
16 A line i a ignal A block i a gain A circle i a um Block Diagram Due to h.f. noie, ue proper block: num eg en eg Tr to ue jut horizontal or vertical line Ue aitional Σ to help e.g. - G Σ - z z G z -
17 Serie: Block Diagram Algebra G G è G G Parallel: G G è G G
18 Feeback: Proof: G G G G G - b e G G G G G e e G G G G e e G G G G e G b b e (,, è
19 G G G G G - n n n n n
20 >> tf('' Tranfer function: >> G(/( Tranfer function: >> G5/(5 Tranfer function: >> GG*G Tranfer function: ^ 7 0 >> HGG Tranfer function: ^ ^ 7 0 >> HFfeeback(G, G Tranfer function: ^ ^ 5
21 >> elatf(,,'inputela',0.05 Tranfer function: 0.9 ep(-0.05* * 0.8 Step Repone >> HHF*ela Tranfer function: ^ 6 5 ep(-0.05* * ^ 5 Amplitue >> tepreph*/ Tranfer function: ^ 6 5 ep(-0.05* * >> tep(h ^3 ^ Time (ec
22 Quarter car upenion Serie R( b k - m R( - b k m Feeback R( b k m b k TF b k H( m b k
23 >> bm('b'; >> mm('m'; >> km('k'; >> m(''; >> Gb*k G b*k >> G/m*/*/ G /m/^ >> GG*G G (b*k/m/^ >> GclG/(G Gcl (b*k/m/^/((b*k/m/^ >> implif(gcl an (b*k/(m*^b*k
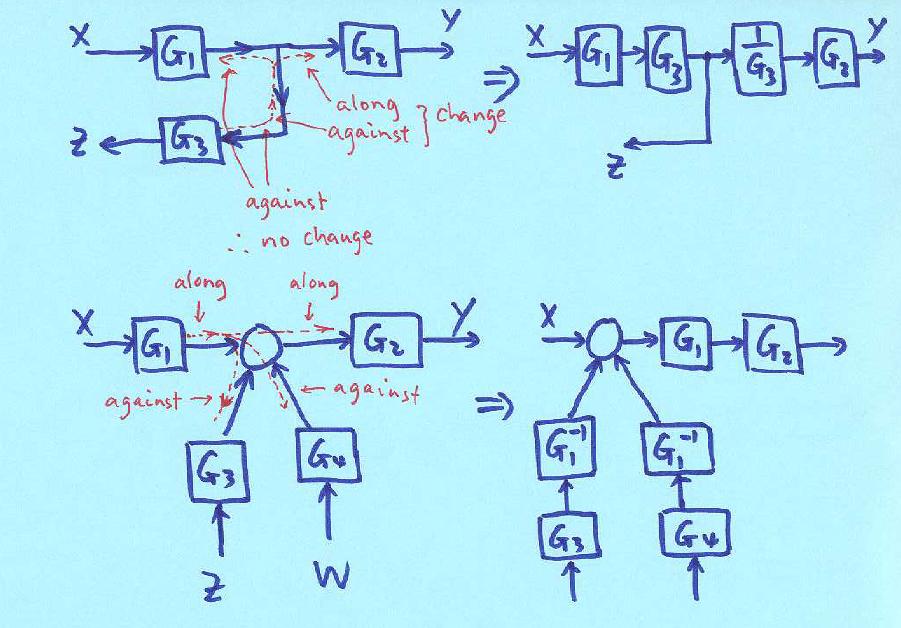
24 Move a block (G acro a into all touching line: If arrow irection change, invert block (/G If arrow irection remain, no change in block For eample: pick-up point ummation along arrow along arrow no change G G G G z G 3 no change G along arrow along arrow z G 3
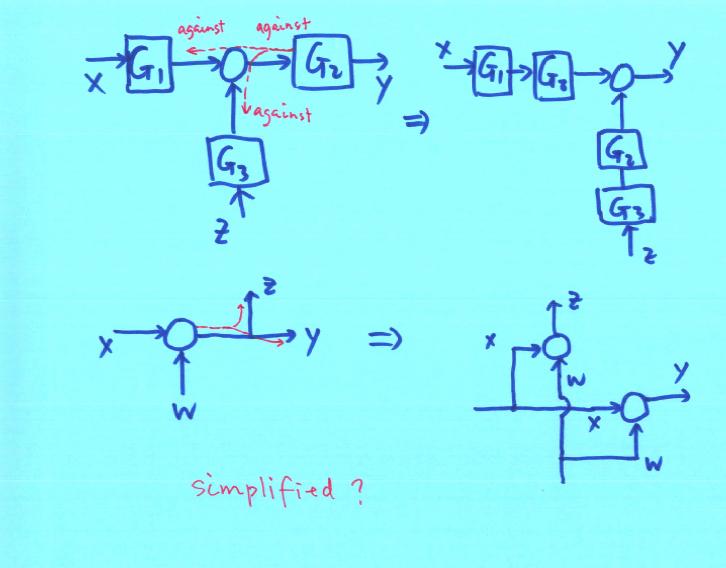
25 againt, againt z G G 3 G againt along è z G G 3 G /G G G è G G 3 /G 3 G z G 3 z
26
27
28 I U - I - L R C V c L R R I L R U - - L R C V c L R R U C ( L R L R L R - R -
29 U L R C( L R L R - R L R U C ( L L R - R R ( L R U C ( L L R L R ( L R R R T. F. C( L R ( L R R L R L R
30 Fin TF from U to Y: 5 U ( 0 Y No pure erie/parallel/feeback Nee to move a block, but which one? Ke: move one block to create pure erie or parallel or feeback! 0 So move either left or right. ( 0
31 ( U ( 0 Y U ( ( ( 0 ( 0 5( 5 Y U ( ( ( 0 0( ( 0 5( 5 Y
32
33 Can ue uperpoition: Firt et D0, fin Y ue to R Then et R0, fin Y ue to D Finall, a the two component to get the overall Y

34 Firt et D0, fin Y ue to R Y GG ( R( GG H

35 Then et R0, fin Y ue to D G Y ( D( ( GG H G
36 Finall, a the two component to get the overall Y GG G Y R D GG H GG H ( ( (
Chapter 3 : Transfer Functions Block Diagrams Signal Flow Graphs
 Chapter 3 : Tranfer Function Block Diagram Signal Flow Graph 3.. Tranfer Function 3.. Block Diagram of Control Sytem 3.3. Signal Flow Graph 3.4. Maon Gain Formula 3.5. Example 3.6. Block Diagram to Signal
Chapter 3 : Tranfer Function Block Diagram Signal Flow Graph 3.. Tranfer Function 3.. Block Diagram of Control Sytem 3.3. Signal Flow Graph 3.4. Maon Gain Formula 3.5. Example 3.6. Block Diagram to Signal
Key Mathematical Backgrounds
 Ke Mathematical Background Dierential Equation Ordinar Linear Partial Nonlinear: mooth, nonmooth,, piecewie linear Map Linear Nonlinear Equilibrium/Stead-State State Solution Linearization Traner Function
Ke Mathematical Background Dierential Equation Ordinar Linear Partial Nonlinear: mooth, nonmooth,, piecewie linear Map Linear Nonlinear Equilibrium/Stead-State State Solution Linearization Traner Function
EE Control Systems LECTURE 6
 Copyright FL Lewi 999 All right reerved EE - Control Sytem LECTURE 6 Updated: Sunday, February, 999 BLOCK DIAGRAM AND MASON'S FORMULA A linear time-invariant (LTI) ytem can be repreented in many way, including:
Copyright FL Lewi 999 All right reerved EE - Control Sytem LECTURE 6 Updated: Sunday, February, 999 BLOCK DIAGRAM AND MASON'S FORMULA A linear time-invariant (LTI) ytem can be repreented in many way, including:
ME 375 FINAL EXAM Wednesday, May 6, 2009
 ME 375 FINAL EXAM Wedneday, May 6, 9 Diviion Meckl :3 / Adam :3 (circle one) Name_ Intruction () Thi i a cloed book examination, but you are allowed three ingle-ided 8.5 crib heet. A calculator i NOT allowed.
ME 375 FINAL EXAM Wedneday, May 6, 9 Diviion Meckl :3 / Adam :3 (circle one) Name_ Intruction () Thi i a cloed book examination, but you are allowed three ingle-ided 8.5 crib heet. A calculator i NOT allowed.
CONTROL SYSTEMS. Chapter 2 : Block Diagram & Signal Flow Graphs GATE Objective & Numerical Type Questions
 ONTOL SYSTEMS hapter : Bloc Diagram & Signal Flow Graph GATE Objective & Numerical Type Quetion Quetion 6 [Practice Boo] [GATE E 994 IIT-Kharagpur : 5 Mar] educe the ignal flow graph hown in figure below,
ONTOL SYSTEMS hapter : Bloc Diagram & Signal Flow Graph GATE Objective & Numerical Type Quetion Quetion 6 [Practice Boo] [GATE E 994 IIT-Kharagpur : 5 Mar] educe the ignal flow graph hown in figure below,
Digital Control System
 Digital Control Sytem Summary # he -tranform play an important role in digital control and dicrete ignal proceing. he -tranform i defined a F () f(k) k () A. Example Conider the following equence: f(k)
Digital Control Sytem Summary # he -tranform play an important role in digital control and dicrete ignal proceing. he -tranform i defined a F () f(k) k () A. Example Conider the following equence: f(k)
Control Systems Engineering ( Chapter 7. Steady-State Errors ) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuits II. R 4 := 100 kohm
 SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2003. Cacaded Op Amp [DC&L, problem 4.29] An ideal op amp ha an output impedance of zero,
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2003. Cacaded Op Amp [DC&L, problem 4.29] An ideal op amp ha an output impedance of zero,
Linear System Fundamentals
 Linear Sytem Fundamental MEM 355 Performance Enhancement of Dynamical Sytem Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Content Sytem Repreentation Stability Concept
Linear Sytem Fundamental MEM 355 Performance Enhancement of Dynamical Sytem Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Content Sytem Repreentation Stability Concept
Mathematical modeling of control systems. Laith Batarseh. Mathematical modeling of control systems
 Chapter two Laith Batareh Mathematical modeling The dynamic of many ytem, whether they are mechanical, electrical, thermal, economic, biological, and o on, may be decribed in term of differential equation
Chapter two Laith Batareh Mathematical modeling The dynamic of many ytem, whether they are mechanical, electrical, thermal, economic, biological, and o on, may be decribed in term of differential equation
The Laplace Transform
 The Laplace Tranform Prof. Siripong Potiuk Pierre Simon De Laplace 749-827 French Atronomer and Mathematician Laplace Tranform An extenion of the CT Fourier tranform to allow analyi of broader cla of CT
The Laplace Tranform Prof. Siripong Potiuk Pierre Simon De Laplace 749-827 French Atronomer and Mathematician Laplace Tranform An extenion of the CT Fourier tranform to allow analyi of broader cla of CT
CHE302 LECTURE V LAPLACE TRANSFORM AND TRANSFER FUNCTION. Professor Dae Ryook Yang
 CHE3 ECTURE V APACE TRANSFORM AND TRANSFER FUNCTION Profeor Dae Ryook Yang Fall Dept. of Chemical and Biological Engineering Korea Univerity CHE3 Proce Dynamic and Control Korea Univerity 5- SOUTION OF
CHE3 ECTURE V APACE TRANSFORM AND TRANSFER FUNCTION Profeor Dae Ryook Yang Fall Dept. of Chemical and Biological Engineering Korea Univerity CHE3 Proce Dynamic and Control Korea Univerity 5- SOUTION OF
Correction for Simple System Example and Notes on Laplace Transforms / Deviation Variables ECHE 550 Fall 2002
 Correction for Simple Sytem Example and Note on Laplace Tranform / Deviation Variable ECHE 55 Fall 22 Conider a tank draining from an initial height of h o at time t =. With no flow into the tank (F in
Correction for Simple Sytem Example and Note on Laplace Tranform / Deviation Variable ECHE 55 Fall 22 Conider a tank draining from an initial height of h o at time t =. With no flow into the tank (F in
ECE-320 Linear Control Systems. Spring 2014, Exam 1. No calculators or computers allowed, you may leave your answers as fractions.
 ECE-0 Linear Control Sytem Spring 04, Exam No calculator or computer allowed, you may leave your anwer a fraction. All problem are worth point unle noted otherwie. Total /00 Problem - refer to the unit
ECE-0 Linear Control Sytem Spring 04, Exam No calculator or computer allowed, you may leave your anwer a fraction. All problem are worth point unle noted otherwie. Total /00 Problem - refer to the unit
FRTN10 Exercise 3. Specifications and Disturbance Models
 FRTN0 Exercie 3. Specification and Diturbance Model 3. A feedback ytem i hown in Figure 3., in which a firt-order proce if controlled by an I controller. d v r u 2 z C() P() y n Figure 3. Sytem in Problem
FRTN0 Exercie 3. Specification and Diturbance Model 3. A feedback ytem i hown in Figure 3., in which a firt-order proce if controlled by an I controller. d v r u 2 z C() P() y n Figure 3. Sytem in Problem
ANSWERS TO MA1506 TUTORIAL 7. Question 1. (a) We shall use the following s-shifting property: L(f(t)) = F (s) L(e ct f(t)) = F (s c)
 We shall use the following s-shifting property: L(f(t)) = F (s) L(e ct f(t)) = F (s c)") ANSWERS O MA56 UORIAL 7 Quetion. a) We hall ue the following -Shifting property: Lft)) = F ) Le ct ft)) = F c) Lt 2 ) = 2 3 ue Ltn ) = n! Lt 2 e 3t ) = Le 3t t 2 ) = n+ 2 + 3) 3 b) Here u denote the Unit
ANSWERS O MA56 UORIAL 7 Quetion. a) We hall ue the following -Shifting property: Lft)) = F ) Le ct ft)) = F c) Lt 2 ) = 2 3 ue Ltn ) = n! Lt 2 e 3t ) = Le 3t t 2 ) = n+ 2 + 3) 3 b) Here u denote the Unit
Pusan National University
 Chapter 12. DESIGN VIA STATE SPACE Puan National Univerity oratory Table of Content v v v v v v v v Introduction Controller Deign Controllability Alternative Approache to Controller Deign Oberver Deign
Chapter 12. DESIGN VIA STATE SPACE Puan National Univerity oratory Table of Content v v v v v v v v Introduction Controller Deign Controllability Alternative Approache to Controller Deign Oberver Deign
( ) ( ) ω = X x t e dt
 ( ) ω = X x t e dt") The Laplace Tranform The Laplace Tranform generalize the Fourier Traform for the entire complex plane For an ignal x(t) the pectrum, or it Fourier tranform i (if it exit): t X x t e dt ω = For the ame
The Laplace Tranform The Laplace Tranform generalize the Fourier Traform for the entire complex plane For an ignal x(t) the pectrum, or it Fourier tranform i (if it exit): t X x t e dt ω = For the ame
Given the following circuit with unknown initial capacitor voltage v(0): X(s) Immediately, we know that the transfer function H(s) is
: X(s) Immediately, we know that the transfer function H(s) is") EE 4G Note: Chapter 6 Intructor: Cheung More about ZSR and ZIR. Finding unknown initial condition: Given the following circuit with unknown initial capacitor voltage v0: F v0/ / Input xt 0Ω Output yt -
EE 4G Note: Chapter 6 Intructor: Cheung More about ZSR and ZIR. Finding unknown initial condition: Given the following circuit with unknown initial capacitor voltage v0: F v0/ / Input xt 0Ω Output yt -
6.003 Homework #7 Solutions
 6.003 Homework #7 Solutions Problems. Secon-orer systems The impulse response of a secon-orer CT system has the form h(t) = e σt cos(ω t + φ)u(t) where the parameters σ, ω, an φ are relate to the parameters
6.003 Homework #7 Solutions Problems. Secon-orer systems The impulse response of a secon-orer CT system has the form h(t) = e σt cos(ω t + φ)u(t) where the parameters σ, ω, an φ are relate to the parameters
Chapter 4 Interconnection of LTI Systems
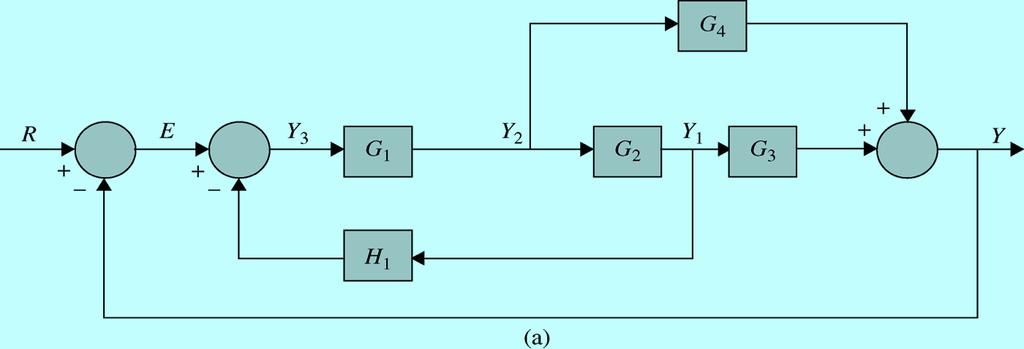
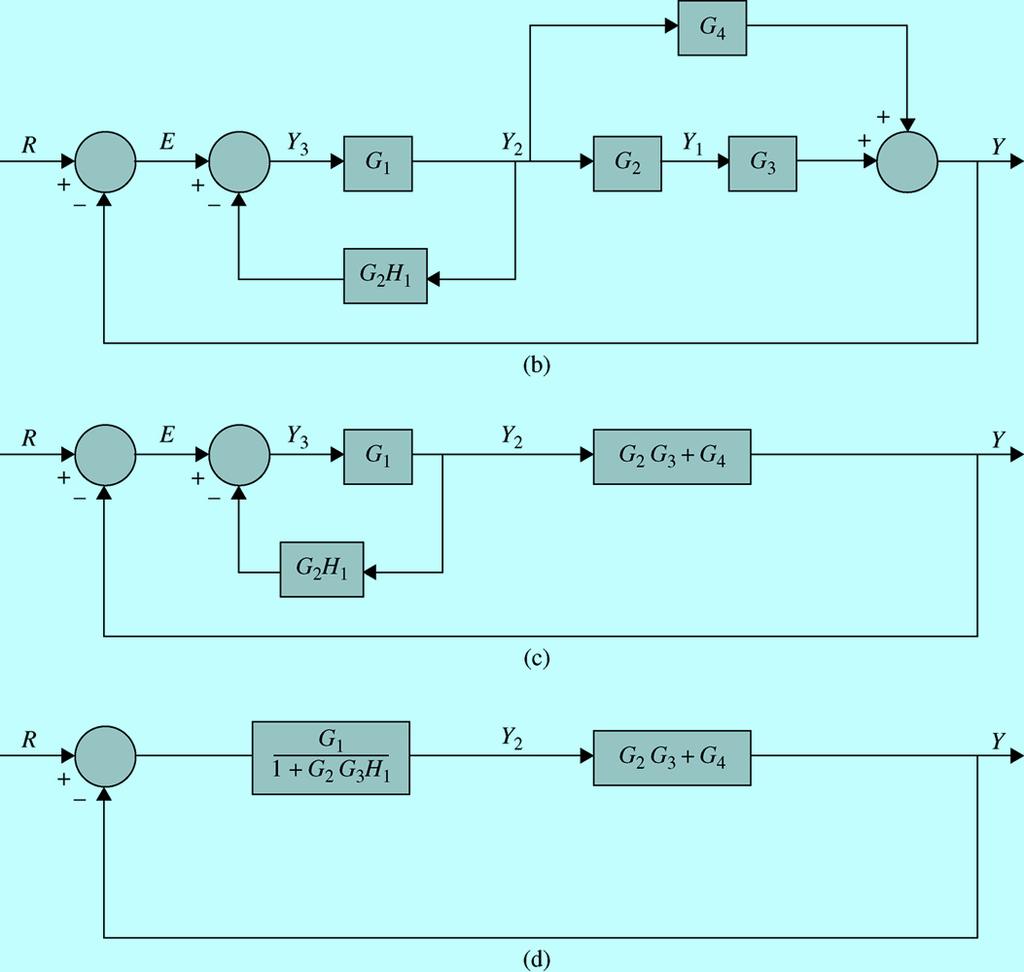
 Chapter 4 Interconnection of LTI Sytem 4. INTRODUCTION Block diagram and ignal flow graph are commonly ued to decribe a large feedback control ytem. Each block in the ytem i repreented by a tranfer function,
Chapter 4 Interconnection of LTI Sytem 4. INTRODUCTION Block diagram and ignal flow graph are commonly ued to decribe a large feedback control ytem. Each block in the ytem i repreented by a tranfer function,
CHBE320 LECTURE V LAPLACE TRANSFORM AND TRANSFER FUNCTION. Professor Dae Ryook Yang
 CHBE3 ECTURE V APACE TRANSFORM AND TRANSFER FUNCTION Profeor Dae Ryook Yang Spring 8 Dept. of Chemical and Biological Engineering 5- Road Map of the ecture V aplace Tranform and Tranfer function Definition
CHBE3 ECTURE V APACE TRANSFORM AND TRANSFER FUNCTION Profeor Dae Ryook Yang Spring 8 Dept. of Chemical and Biological Engineering 5- Road Map of the ecture V aplace Tranform and Tranfer function Definition
LTV System Modelling
 Helinki Univerit of Technolog S-72.333 Potgraduate Coure in Radiocommunication Fall 2000 LTV Stem Modelling Heikki Lorentz Sonera Entrum O heikki.lorentz@onera.fi Januar 23 rd 200 Content. Introduction
Helinki Univerit of Technolog S-72.333 Potgraduate Coure in Radiocommunication Fall 2000 LTV Stem Modelling Heikki Lorentz Sonera Entrum O heikki.lorentz@onera.fi Januar 23 rd 200 Content. Introduction
ECE382/ME482 Spring 2004 Homework 4 Solution November 14,
 ECE382/ME482 Spring 2004 Homework 4 Solution November 14, 2005 1 Solution to HW4 AP4.3 Intead of a contant or tep reference input, we are given, in thi problem, a more complicated reference path, r(t)
ECE382/ME482 Spring 2004 Homework 4 Solution November 14, 2005 1 Solution to HW4 AP4.3 Intead of a contant or tep reference input, we are given, in thi problem, a more complicated reference path, r(t)
Identification Methods for Structural Systems
 Prof. Dr. Eleni Chatzi System Stability Fundamentals Overview System Stability Assume given a dynamic system with input u(t) and output x(t). The stability property of a dynamic system can be defined from
Prof. Dr. Eleni Chatzi System Stability Fundamentals Overview System Stability Assume given a dynamic system with input u(t) and output x(t). The stability property of a dynamic system can be defined from
CHAPTER 4 DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL
 98 CHAPTER DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL INTRODUCTION The deign of ytem uing tate pace model for the deign i called a modern control deign and it i
98 CHAPTER DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL INTRODUCTION The deign of ytem uing tate pace model for the deign i called a modern control deign and it i
into a discrete time function. Recall that the table of Laplace/z-transforms is constructed by (i) selecting to get
 selecting to get") Lecture 25 Introduction to Some Matlab c2d Code in Relation to Sampled Sytem here are many way to convert a continuou time function, { h( t) ; t [0, )} into a dicrete time function { h ( k) ; k {0,,, }}
Lecture 25 Introduction to Some Matlab c2d Code in Relation to Sampled Sytem here are many way to convert a continuou time function, { h( t) ; t [0, )} into a dicrete time function { h ( k) ; k {0,,, }}
Chapter 2 Sampling and Quantization. In order to investigate sampling and quantization, the difference between analog
 Chapter Sampling and Quantization.1 Analog and Digital Signal In order to invetigate ampling and quantization, the difference between analog and digital ignal mut be undertood. Analog ignal conit of continuou
Chapter Sampling and Quantization.1 Analog and Digital Signal In order to invetigate ampling and quantization, the difference between analog and digital ignal mut be undertood. Analog ignal conit of continuou
R L R L L sl C L 1 sc
 2260 N. Cotter PRACTICE FINAL EXAM SOLUTION: Prob 3 3. (50 point) u(t) V i(t) L - R v(t) C - The initial energy tored in the circuit i zero. 500 Ω L 200 mh a. Chooe value of R and C to accomplih the following:
2260 N. Cotter PRACTICE FINAL EXAM SOLUTION: Prob 3 3. (50 point) u(t) V i(t) L - R v(t) C - The initial energy tored in the circuit i zero. 500 Ω L 200 mh a. Chooe value of R and C to accomplih the following:
R. W. Erickson. Department of Electrical, Computer, and Energy Engineering University of Colorado, Boulder
 R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder ZOH: Sampled Data Sytem Example v T Sampler v* H Zero-order hold H v o e = 1 T 1 v *( ) = v( jkω
R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder ZOH: Sampled Data Sytem Example v T Sampler v* H Zero-order hold H v o e = 1 T 1 v *( ) = v( jkω
5.5 Application of Frequency Response: Signal Filters
 44 Dynamic Sytem Second order lowpa filter having tranfer function H()=H ()H () u H () H () y Firt order lowpa filter Figure 5.5: Contruction of a econd order low-pa filter by combining two firt order
44 Dynamic Sytem Second order lowpa filter having tranfer function H()=H ()H () u H () H () y Firt order lowpa filter Figure 5.5: Contruction of a econd order low-pa filter by combining two firt order
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuits II. Solutions to Assignment 3 February 2005.
 SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2005. Initial Condition Source 0 V battery witch flip at t 0 find i 3 (t) Component value:
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2005. Initial Condition Source 0 V battery witch flip at t 0 find i 3 (t) Component value:
ME 375 EXAM #1 Tuesday February 21, 2006
 ME 375 EXAM #1 Tueday February 1, 006 Diviion Adam 11:30 / Savran :30 (circle one) Name Intruction (1) Thi i a cloed book examination, but you are allowed one 8.5x11 crib heet. () You have one hour to
ME 375 EXAM #1 Tueday February 1, 006 Diviion Adam 11:30 / Savran :30 (circle one) Name Intruction (1) Thi i a cloed book examination, but you are allowed one 8.5x11 crib heet. () You have one hour to
ECE 3510 Root Locus Design Examples. PI To eliminate steady-state error (for constant inputs) & perfect rejection of constant disturbances
 & perfect rejection of constant disturbances") ECE 350 Root Locu Deign Example Recall the imple crude ervo from lab G( ) 0 6.64 53.78 σ = = 3 23.473 PI To eliminate teady-tate error (for contant input) & perfect reection of contant diturbance Note:
ECE 350 Root Locu Deign Example Recall the imple crude ervo from lab G( ) 0 6.64 53.78 σ = = 3 23.473 PI To eliminate teady-tate error (for contant input) & perfect reection of contant diturbance Note:
MM1: Basic Concept (I): System and its Variables
: System and its Variables") MM1: Baic Concept (I): Sytem and it Variable A ytem i a collection of component which are coordinated together to perform a function Sytem interact with their environment. The interaction i defined in
MM1: Baic Concept (I): Sytem and it Variable A ytem i a collection of component which are coordinated together to perform a function Sytem interact with their environment. The interaction i defined in
ME 375 FINAL EXAM SOLUTIONS Friday December 17, 2004
 ME 375 FINAL EXAM SOLUTIONS Friday December 7, 004 Diviion Adam 0:30 / Yao :30 (circle one) Name Intruction () Thi i a cloed book eamination, but you are allowed three 8.5 crib heet. () You have two hour
ME 375 FINAL EXAM SOLUTIONS Friday December 7, 004 Diviion Adam 0:30 / Yao :30 (circle one) Name Intruction () Thi i a cloed book eamination, but you are allowed three 8.5 crib heet. () You have two hour
Function and Impulse Response
 Tranfer Function and Impule Repone Solution of Selected Unolved Example. Tranfer Function Q.8 Solution : The -domain network i hown in the Fig... Applying VL to the two loop, R R R I () I () L I () L V()
Tranfer Function and Impule Repone Solution of Selected Unolved Example. Tranfer Function Q.8 Solution : The -domain network i hown in the Fig... Applying VL to the two loop, R R R I () I () L I () L V()
18.03SC Final Exam = x 2 y ( ) + x This problem concerns the differential equation. dy 2
 + x This problem concerns the differential equation. dy 2") 803SC Final Exam Thi problem concern the differential equation dy = x y ( ) dx Let y = f (x) be the olution with f ( ) = 0 (a) Sketch the iocline for lope, 0, and, and ketch the direction field along them
803SC Final Exam Thi problem concern the differential equation dy = x y ( ) dx Let y = f (x) be the olution with f ( ) = 0 (a) Sketch the iocline for lope, 0, and, and ketch the direction field along them
NAME (pinyin/italian)... MATRICULATION NUMBER... SIGNATURE
... MATRICULATION NUMBER... SIGNATURE") POLITONG SHANGHAI BASIC AUTOMATIC CONTROL June Academic Year / Exam grade NAME (pinyin/italian)... MATRICULATION NUMBER... SIGNATURE Ue only thee page (including the bac) for anwer. Do not ue additional
POLITONG SHANGHAI BASIC AUTOMATIC CONTROL June Academic Year / Exam grade NAME (pinyin/italian)... MATRICULATION NUMBER... SIGNATURE Ue only thee page (including the bac) for anwer. Do not ue additional
EE C128 / ME C134 Problem Set 1 Solution (Fall 2010) Wenjie Chen and Jansen Sheng, UC Berkeley
 Wenjie Chen and Jansen Sheng, UC Berkeley") EE C28 / ME C34 Problem Set Solution (Fall 200) Wenjie Chen and Janen Sheng, UC Berkeley. (0 pt) BIBO tability The ytem h(t) = co(t)u(t) i not BIBO table. What i the region of convergence for H()? A bounded
EE C28 / ME C34 Problem Set Solution (Fall 200) Wenjie Chen and Janen Sheng, UC Berkeley. (0 pt) BIBO tability The ytem h(t) = co(t)u(t) i not BIBO table. What i the region of convergence for H()? A bounded
Notes on the Fourier Transform
 BE/EECS 56 6 FT Note Note on the Fourier Tranform Definition. The Fourier Tranform FT relate a function to it frequenc omain equivalent. The FT of a function i efine b the Fourier integral: G F{ } e iπ
BE/EECS 56 6 FT Note Note on the Fourier Tranform Definition. The Fourier Tranform FT relate a function to it frequenc omain equivalent. The FT of a function i efine b the Fourier integral: G F{ } e iπ
55:041 Electronic Circuits
 55:04 Electronic ircuit Frequency epone hapter 7 A. Kruger Frequency epone- ee page 4-5 of the Prologue in the text Important eview co Thi lead to the concept of phaor we encountered in ircuit In Linear
55:04 Electronic ircuit Frequency epone hapter 7 A. Kruger Frequency epone- ee page 4-5 of the Prologue in the text Important eview co Thi lead to the concept of phaor we encountered in ircuit In Linear
Differentiability, Computing Derivatives, Trig Review. Goals:
 Secants vs. Derivatives - Unit #3 : Goals: Differentiability, Computing Derivatives, Trig Review Determine when a function is ifferentiable at a point Relate the erivative graph to the the graph of an
Secants vs. Derivatives - Unit #3 : Goals: Differentiability, Computing Derivatives, Trig Review Determine when a function is ifferentiable at a point Relate the erivative graph to the the graph of an
Control Systems. Frequency domain analysis. L. Lanari
 Control Systems m i l e r p r a in r e v y n is o Frequency domain analysis L. Lanari outline introduce the Laplace unilateral transform define its properties show its advantages in turning ODEs to algebraic
Control Systems m i l e r p r a in r e v y n is o Frequency domain analysis L. Lanari outline introduce the Laplace unilateral transform define its properties show its advantages in turning ODEs to algebraic
Lecture 8. PID control. Industrial process control ( today) PID control. Insights about PID actions
 PID control. Insights about PID actions") Lecture 8. PID control. The role of P, I, and D action 2. PID tuning Indutrial proce control (92... today) Feedback control i ued to improve the proce performance: tatic performance: for contant reference,
Lecture 8. PID control. The role of P, I, and D action 2. PID tuning Indutrial proce control (92... today) Feedback control i ued to improve the proce performance: tatic performance: for contant reference,
MATHEMATICAL MODELS OF PHYSICAL SYSTEMS
 hapter MATHEMATIAL MODELS OF PHYSIAL SYSTEMS.. INTODUTION For the analyi and deign of control ytem, we need to formulate a mathematical decription of the ytem. The proce of obtaining the deired mathematical
hapter MATHEMATIAL MODELS OF PHYSIAL SYSTEMS.. INTODUTION For the analyi and deign of control ytem, we need to formulate a mathematical decription of the ytem. The proce of obtaining the deired mathematical
Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubaneswar Kolkata Patna Web: Ph:
 Serial : LS_N_A_Network Theory_098 Delhi Noida Bhopal Hyderabad Jaipur Lucknow ndore Pune Bhubanewar Kolkata Patna Web: E-mail: info@madeeay.in Ph: 0-4546 CLASS TEST 08-9 NSTRUMENTATON ENGNEERNG Subject
Serial : LS_N_A_Network Theory_098 Delhi Noida Bhopal Hyderabad Jaipur Lucknow ndore Pune Bhubanewar Kolkata Patna Web: E-mail: info@madeeay.in Ph: 0-4546 CLASS TEST 08-9 NSTRUMENTATON ENGNEERNG Subject
ECE-202 FINAL December 13, 2016 CIRCLE YOUR DIVISION
 ECE-202 Final, Fall 16 1 ECE-202 FINAL December 13, 2016 Name: (Pleae print clearly.) Student Email: CIRCLE YOUR DIVISION DeCarlo- 8:30-9:30 Talavage-9:30-10:30 2021 2022 INSTRUCTIONS There are 35 multiple
ECE-202 Final, Fall 16 1 ECE-202 FINAL December 13, 2016 Name: (Pleae print clearly.) Student Email: CIRCLE YOUR DIVISION DeCarlo- 8:30-9:30 Talavage-9:30-10:30 2021 2022 INSTRUCTIONS There are 35 multiple
Wolfgang Hofle. CERN CAS Darmstadt, October W. Hofle feedback systems
 Wolfgang Hofle Wolfgang.Hofle@cern.ch CERN CAS Darmtadt, October 9 Feedback i a mechanim that influence a ytem by looping back an output to the input a concept which i found in abundance in nature and
Wolfgang Hofle Wolfgang.Hofle@cern.ch CERN CAS Darmtadt, October 9 Feedback i a mechanim that influence a ytem by looping back an output to the input a concept which i found in abundance in nature and
EE C128 / ME C134 Final Exam Fall 2014
 EE C128 / ME C134 Final Exam Fall 2014 December 19, 2014 Your PRINTED FULL NAME Your STUDENT ID NUMBER Number of additional sheets 1. No computers, no tablets, no connected device (phone etc.) 2. Pocket
EE C128 / ME C134 Final Exam Fall 2014 December 19, 2014 Your PRINTED FULL NAME Your STUDENT ID NUMBER Number of additional sheets 1. No computers, no tablets, no connected device (phone etc.) 2. Pocket
Analysis of Step Response, Impulse and Ramp Response in the Continuous Stirred Tank Reactor System
 ISSN: 454-50 Volume 0 - Iue 05 May 07 PP. 7-78 Analyi of Step Repone, Impule and Ramp Repone in the ontinuou Stirred Tank Reactor Sytem * Zohreh Khohraftar, Pirouz Derakhhi, (Department of hemitry, Science
ISSN: 454-50 Volume 0 - Iue 05 May 07 PP. 7-78 Analyi of Step Repone, Impule and Ramp Repone in the ontinuou Stirred Tank Reactor Sytem * Zohreh Khohraftar, Pirouz Derakhhi, (Department of hemitry, Science
CHAPTER 8 OBSERVER BASED REDUCED ORDER CONTROLLER DESIGN FOR LARGE SCALE LINEAR DISCRETE-TIME CONTROL SYSTEMS
 CHAPTER 8 OBSERVER BASED REDUCED ORDER CONTROLLER DESIGN FOR LARGE SCALE LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.1 INTRODUCTION 8.2 REDUCED ORDER MODEL DESIGN FOR LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.3
CHAPTER 8 OBSERVER BASED REDUCED ORDER CONTROLLER DESIGN FOR LARGE SCALE LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.1 INTRODUCTION 8.2 REDUCED ORDER MODEL DESIGN FOR LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.3
ECSE 4440 Control System Engineering. Project 1. Controller Design of a Second Order System TA
 ECSE 4440 Control Sytem Enineerin Project 1 Controller Dein of a Secon Orer Sytem TA Content 1. Abtract. Introuction 3. Controller Dein for a Sinle Penulum 4. Concluion 1. Abtract The uroe of thi roject
ECSE 4440 Control Sytem Enineerin Project 1 Controller Dein of a Secon Orer Sytem TA Content 1. Abtract. Introuction 3. Controller Dein for a Sinle Penulum 4. Concluion 1. Abtract The uroe of thi roject
Massachusetts Institute of Technology. Department of Electrical Engineering and Computer Science : MULTIVARIABLE CONTROL SYSTEMS by A.
 Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Q-Parameterization 1 This lecture introduces the so-called
Massachusetts Institute of Technology Department of Electrical Engineering and Computer Science 6.245: MULTIVARIABLE CONTROL SYSTEMS by A. Megretski Q-Parameterization 1 This lecture introduces the so-called
Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubaneswar Kolkata Patna Web: Ph:
 Serial : LS_B_EC_Network Theory_0098 CLASS TEST (GATE) Delhi Noida Bhopal Hyderabad Jaipur Lucknow ndore Pune Bhubanewar Kolkata Patna Web: E-mail: info@madeeay.in Ph: 0-4546 CLASS TEST 08-9 ELECTRONCS
Serial : LS_B_EC_Network Theory_0098 CLASS TEST (GATE) Delhi Noida Bhopal Hyderabad Jaipur Lucknow ndore Pune Bhubanewar Kolkata Patna Web: E-mail: info@madeeay.in Ph: 0-4546 CLASS TEST 08-9 ELECTRONCS
EE 370L Controls Laboratory. Laboratory Exercise #7 Root Locus. Department of Electrical and Computer Engineering University of Nevada, at Las Vegas
 EE 370L Controls Laboratory Laboratory Exercise #7 Root Locus Department of Electrical an Computer Engineering University of Nevaa, at Las Vegas 1. Learning Objectives To emonstrate the concept of error
EE 370L Controls Laboratory Laboratory Exercise #7 Root Locus Department of Electrical an Computer Engineering University of Nevaa, at Las Vegas 1. Learning Objectives To emonstrate the concept of error
Spring 2014 EE 445S Real-Time Digital Signal Processing Laboratory. Homework #0 Solutions on Review of Signals and Systems Material
 Spring 4 EE 445S Real-Time Digital Signal Proceing Laboratory Prof. Evan Homework # Solution on Review of Signal and Sytem Material Problem.. Continuou-Time Sinuoidal Generation. In practice, we cannot
Spring 4 EE 445S Real-Time Digital Signal Proceing Laboratory Prof. Evan Homework # Solution on Review of Signal and Sytem Material Problem.. Continuou-Time Sinuoidal Generation. In practice, we cannot
Properties of Z-transform Transform 1 Linearity a
 Midterm 3 (Fall 6 of EEG:. Thi midterm conit of eight ingle-ided page. The firt three page contain variou table followed by FOUR eam quetion and one etra workheet. You can tear out any page but make ure
Midterm 3 (Fall 6 of EEG:. Thi midterm conit of eight ingle-ided page. The firt three page contain variou table followed by FOUR eam quetion and one etra workheet. You can tear out any page but make ure
7 Minimal realization and coprime fraction
 7 Minimal realization and coprime fraction 7 Introduction If a tranfer function i realizable, what i the mallet poible dimenion? Realization with the mallet poible dimenion are called minimal-dimenional
7 Minimal realization and coprime fraction 7 Introduction If a tranfer function i realizable, what i the mallet poible dimenion? Realization with the mallet poible dimenion are called minimal-dimenional
3.6. Implicit Differentiation. Implicitly Defined Functions
 3.6 Implicit Differentiation 205 3.6 Implicit Differentiation 5 2 25 2 25 2 0 5 (3, ) Slope 3 FIGURE 3.36 The circle combines the graphs of two functions. The graph of 2 is the lower semicircle an passes
3.6 Implicit Differentiation 205 3.6 Implicit Differentiation 5 2 25 2 25 2 0 5 (3, ) Slope 3 FIGURE 3.36 The circle combines the graphs of two functions. The graph of 2 is the lower semicircle an passes
Midterm Test Nov 10, 2010 Student Number:
 Mathematic 265 Section: 03 Verion A Full Name: Midterm Tet Nov 0, 200 Student Number: Intruction: There are 6 page in thi tet (including thi cover page).. Caution: There may (or may not) be more than one
Mathematic 265 Section: 03 Verion A Full Name: Midterm Tet Nov 0, 200 Student Number: Intruction: There are 6 page in thi tet (including thi cover page).. Caution: There may (or may not) be more than one
Math 180A. Lecture 16 Friday May 7 th. Expectation. Recall the three main probability density functions so far (1) Uniform (2) Exponential.
 Uniform (2) Exponential.") Math 8A Lecture 6 Friday May 7 th Epectation Recall the three main probability density functions so far () Uniform () Eponential (3) Power Law e, ( ), Math 8A Lecture 6 Friday May 7 th Epectation Eample
Math 8A Lecture 6 Friday May 7 th Epectation Recall the three main probability density functions so far () Uniform () Eponential (3) Power Law e, ( ), Math 8A Lecture 6 Friday May 7 th Epectation Eample
ELEC3114 Control Systems 1
 ELEC34 Control Systems Linear Systems - Moelling - Some Issues Session 2, 2007 Introuction Linear systems may be represente in a number of ifferent ways. Figure shows the relationship between various representations.
ELEC34 Control Systems Linear Systems - Moelling - Some Issues Session 2, 2007 Introuction Linear systems may be represente in a number of ifferent ways. Figure shows the relationship between various representations.
Implicit Differentiation. Lecture 16.
 Implicit Differentiation. Lecture 16. We are use to working only with functions that are efine explicitly. That is, ones like f(x) = 5x 3 + 7x x 2 + 1 or s(t) = e t5 3, in which the function is escribe
Implicit Differentiation. Lecture 16. We are use to working only with functions that are efine explicitly. That is, ones like f(x) = 5x 3 + 7x x 2 + 1 or s(t) = e t5 3, in which the function is escribe
Inverse Functions. Review from Last Time: The Derivative of y = ln x. [ln. Last time we saw that
 Inverse Functions Review from Last Time: The Derivative of y = ln Last time we saw that THEOREM 22.0.. The natural log function is ifferentiable an More generally, the chain rule version is ln ) =. ln
Inverse Functions Review from Last Time: The Derivative of y = ln Last time we saw that THEOREM 22.0.. The natural log function is ifferentiable an More generally, the chain rule version is ln ) =. ln
Math 251 Notes. Part I.
 Math 251 Notes. Part I. F. Patricia Meina May 6, 2013 Growth Moel.Consumer price inex. [Problem 20, page 172] The U.S. consumer price inex (CPI) measures the cost of living base on a value of 100 in the
Math 251 Notes. Part I. F. Patricia Meina May 6, 2013 Growth Moel.Consumer price inex. [Problem 20, page 172] The U.S. consumer price inex (CPI) measures the cost of living base on a value of 100 in the
EE/ME/AE324: Dynamical Systems. Chapter 8: Transfer Function Analysis
 EE/ME/AE34: Dynamical Sytem Chapter 8: Tranfer Function Analyi The Sytem Tranfer Function Conider the ytem decribed by the nth-order I/O eqn.: ( n) ( n 1) ( m) y + a y + + a y = b u + + bu n 1 0 m 0 Taking
EE/ME/AE34: Dynamical Sytem Chapter 8: Tranfer Function Analyi The Sytem Tranfer Function Conider the ytem decribed by the nth-order I/O eqn.: ( n) ( n 1) ( m) y + a y + + a y = b u + + bu n 1 0 m 0 Taking
DESIGN OF CONTROLLERS FOR STABLE AND UNSTABLE SYSTEMS WITH TIME DELAY
 DESIGN OF CONTROLLERS FOR STABLE AND UNSTABLE SYSTEMS WITH TIME DELAY P. Dotál, V. Bobál Department of Proce Control, Facult of Technolog, Toma Bata Univerit in Zlín Nám. T. G. Maarka 75, 76 7 Zlín, Czech
DESIGN OF CONTROLLERS FOR STABLE AND UNSTABLE SYSTEMS WITH TIME DELAY P. Dotál, V. Bobál Department of Proce Control, Facult of Technolog, Toma Bata Univerit in Zlín Nám. T. G. Maarka 75, 76 7 Zlín, Czech
Bogoliubov Transformation in Classical Mechanics
 Bogoliubov Tranformation in Claical Mechanic Canonical Tranformation Suppoe we have a et of complex canonical variable, {a j }, and would like to conider another et of variable, {b }, b b ({a j }). How
Bogoliubov Tranformation in Claical Mechanic Canonical Tranformation Suppoe we have a et of complex canonical variable, {a j }, and would like to conider another et of variable, {b }, b b ({a j }). How
EXERCISES FOR SECTION 6.3
 y 6. Secon-Orer Equation 499.58 4 t EXERCISES FOR SECTION 6.. We ue integration by part twice to compute Lin ωt Firt, letting u in ωt an v e t t,weget Lin ωt in ωt e t e t lim b in ωt e t t. in ωt ω e
y 6. Secon-Orer Equation 499.58 4 t EXERCISES FOR SECTION 6.. We ue integration by part twice to compute Lin ωt Firt, letting u in ωt an v e t t,weget Lin ωt in ωt e t e t lim b in ωt e t t. in ωt ω e
Engineering gapplications. Applications of Laplace Transform
 Differential Equation and Engineering gapplication ATH 220 Application of Laplace Tranform Introduction to Laplace Tranform /3 For any function ft, it Laplace Tranform i given a: F t e f t dt 0 ft i aid
Differential Equation and Engineering gapplication ATH 220 Application of Laplace Tranform Introduction to Laplace Tranform /3 For any function ft, it Laplace Tranform i given a: F t e f t dt 0 ft i aid
Module: 8 Lecture: 1
 Moule: 8 Lecture: 1 Energy iipate by amping Uually amping i preent in all ocillatory ytem. It effect i to remove energy from the ytem. Energy in a vibrating ytem i either iipate into heat oun or raiate
Moule: 8 Lecture: 1 Energy iipate by amping Uually amping i preent in all ocillatory ytem. It effect i to remove energy from the ytem. Energy in a vibrating ytem i either iipate into heat oun or raiate
Exercises for lectures 19 Polynomial methods
 Exercie for lecture 19 Polynomial method Michael Šebek Automatic control 016 15-4-17 Diviion of polynomial with and without remainder Polynomial form a circle, but not a body. (Circle alo form integer,
Exercie for lecture 19 Polynomial method Michael Šebek Automatic control 016 15-4-17 Diviion of polynomial with and without remainder Polynomial form a circle, but not a body. (Circle alo form integer,
6 OUTPUT FEEDBACK DESIGN
 6 OUTPUT FEEDBACK DESIGN When the whole sate vector is not available for feedback, i.e, we can measure only y = Cx. 6.1 Review of observer design Recall from the first class in linear systems that a simple
6 OUTPUT FEEDBACK DESIGN When the whole sate vector is not available for feedback, i.e, we can measure only y = Cx. 6.1 Review of observer design Recall from the first class in linear systems that a simple
Modeling in the Frequency Domain
 T W O Modeling in the Frequency Domain SOLUTIONS TO CASE STUDIES CHALLENGES Antenna Control: Tranfer Function Finding each tranfer function: Pot: V i θ i 0 π ; Pre-Amp: V p V i K; Power Amp: E a V p 50
T W O Modeling in the Frequency Domain SOLUTIONS TO CASE STUDIES CHALLENGES Antenna Control: Tranfer Function Finding each tranfer function: Pot: V i θ i 0 π ; Pre-Amp: V p V i K; Power Amp: E a V p 50
EE105 - Fall 2005 Microelectronic Devices and Circuits
 EE5 - Fall 5 Microelectronic Device and ircuit Lecture 9 Second-Order ircuit Amplifier Frequency Repone Announcement Homework 8 due tomorrow noon Lab 7 next week Reading: hapter.,.3. Lecture Material Lat
EE5 - Fall 5 Microelectronic Device and ircuit Lecture 9 Second-Order ircuit Amplifier Frequency Repone Announcement Homework 8 due tomorrow noon Lab 7 next week Reading: hapter.,.3. Lecture Material Lat
6.241 Dynamic Systems and Control
 6.241 Dynamic Systems and Control Lecture 12: I/O Stability Readings: DDV, Chapters 15, 16 Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology March 14, 2011 E. Frazzoli
6.241 Dynamic Systems and Control Lecture 12: I/O Stability Readings: DDV, Chapters 15, 16 Emilio Frazzoli Aeronautics and Astronautics Massachusetts Institute of Technology March 14, 2011 E. Frazzoli
EE 4343/ Control System Design Project
 Copyright F.L. Lewi 2004 All right reerved EE 4343/5320 - Control Sytem Deign Project Updated: Sunday, February 08, 2004 Background: Analyi of Linear ytem, MATLAB Review of Baic Concept LTI Sytem LT I
Copyright F.L. Lewi 2004 All right reerved EE 4343/5320 - Control Sytem Deign Project Updated: Sunday, February 08, 2004 Background: Analyi of Linear ytem, MATLAB Review of Baic Concept LTI Sytem LT I
POLE PLACEMENT. Sadegh Bolouki. Lecture slides for ECE 515. University of Illinois, Urbana-Champaign. Fall S. Bolouki (UIUC) 1 / 19
 1 / 19") POLE PLACEMENT Sadegh Bolouki Lecture slides for ECE 515 University of Illinois, Urbana-Champaign Fall 2016 S. Bolouki (UIUC) 1 / 19 Outline 1 State Feedback 2 Observer 3 Observer Feedback 4 Reduced Order
POLE PLACEMENT Sadegh Bolouki Lecture slides for ECE 515 University of Illinois, Urbana-Champaign Fall 2016 S. Bolouki (UIUC) 1 / 19 Outline 1 State Feedback 2 Observer 3 Observer Feedback 4 Reduced Order
Unit #6 - Families of Functions, Taylor Polynomials, l Hopital s Rule
 Unit # - Families of Functions, Taylor Polynomials, l Hopital s Rule Some problems an solutions selecte or aapte from Hughes-Hallett Calculus. Critical Points. Consier the function f) = 54 +. b) a) Fin
Unit # - Families of Functions, Taylor Polynomials, l Hopital s Rule Some problems an solutions selecte or aapte from Hughes-Hallett Calculus. Critical Points. Consier the function f) = 54 +. b) a) Fin
State Space: Observer Design Lecture 11
 State Space: Oberver Deign Lecture Advanced Control Sytem Dr Eyad Radwan Dr Eyad Radwan/ACS/ State Space-L Controller deign relie upon acce to the tate variable for feedback through adjutable gain. Thi
State Space: Oberver Deign Lecture Advanced Control Sytem Dr Eyad Radwan Dr Eyad Radwan/ACS/ State Space-L Controller deign relie upon acce to the tate variable for feedback through adjutable gain. Thi
Lecture #9 Continuous time filter
 Lecture #9 Continuou time filter Oliver Faut December 5, 2006 Content Review. Motivation......................................... 2 2 Filter pecification 2 2. Low pa..........................................
Lecture #9 Continuou time filter Oliver Faut December 5, 2006 Content Review. Motivation......................................... 2 2 Filter pecification 2 2. Low pa..........................................
Laplace Transformation
 Univerity of Technology Electromechanical Department Energy Branch Advance Mathematic Laplace Tranformation nd Cla Lecture 6 Page of 7 Laplace Tranformation Definition Suppoe that f(t) i a piecewie continuou
Univerity of Technology Electromechanical Department Energy Branch Advance Mathematic Laplace Tranformation nd Cla Lecture 6 Page of 7 Laplace Tranformation Definition Suppoe that f(t) i a piecewie continuou
March 18, 2014 Academic Year 2013/14
 POLITONG - SHANGHAI BASIC AUTOMATIC CONTROL Exam grade March 8, 4 Academic Year 3/4 NAME (Pinyin/Italian)... STUDENT ID Ue only thee page (including the back) for anwer. Do not ue additional heet. Ue of
POLITONG - SHANGHAI BASIC AUTOMATIC CONTROL Exam grade March 8, 4 Academic Year 3/4 NAME (Pinyin/Italian)... STUDENT ID Ue only thee page (including the back) for anwer. Do not ue additional heet. Ue of
Sampling and the Discrete Fourier Transform
 Sampling and the Dicrete Fourier Tranform Sampling Method Sampling i mot commonly done with two device, the ample-and-hold (S/H) and the analog-to-digital-converter (ADC) The S/H acquire a CT ignal at
Sampling and the Dicrete Fourier Tranform Sampling Method Sampling i mot commonly done with two device, the ample-and-hold (S/H) and the analog-to-digital-converter (ADC) The S/H acquire a CT ignal at
Summary: Differentiation
 Techniques of Differentiation. Inverse Trigonometric functions The basic formulas (available in MF5 are: Summary: Differentiation ( sin ( cos The basic formula can be generalize as follows: Note: ( sin
Techniques of Differentiation. Inverse Trigonometric functions The basic formulas (available in MF5 are: Summary: Differentiation ( sin ( cos The basic formula can be generalize as follows: Note: ( sin
COMM 602: Digital Signal Processing. Lecture 8. Digital Filter Design
 COMM 60: Digital Signal Proeing Leture 8 Digital Filter Deign Remember: Filter Type Filter Band Pratial Filter peifiation Pratial Filter peifiation H ellipti H Pratial Filter peifiation p p IIR Filter
COMM 60: Digital Signal Proeing Leture 8 Digital Filter Deign Remember: Filter Type Filter Band Pratial Filter peifiation Pratial Filter peifiation H ellipti H Pratial Filter peifiation p p IIR Filter
( 1) EE 313 Linear Signals & Systems (Fall 2018) Solution Set for Homework #10 on Laplace Transforms
 EE 313 Linear Signals & Systems (Fall 2018) Solution Set for Homework #10 on Laplace Transforms") EE 33 Linear Signal & Sytem (Fall 08) Solution Set for Homework #0 on Laplace Tranform By: Mr. Houhang Salimian & Prof. Brian L. Evan Problem. a) xt () = ut () ut ( ) From lecture Lut { ()} = and { } t
EE 33 Linear Signal & Sytem (Fall 08) Solution Set for Homework #0 on Laplace Tranform By: Mr. Houhang Salimian & Prof. Brian L. Evan Problem. a) xt () = ut () ut ( ) From lecture Lut { ()} = and { } t
The state variable description of an LTI system is given by 3 1O. Statement for Linked Answer Questions 3 and 4 :
 CHAPTER 6 CONTROL SYSTEMS YEAR TO MARKS MCQ 6. The tate variable decription of an LTI ytem i given by Jxo N J a NJx N JN K O K OK O K O xo a x + u Kxo O K 3 a3 OKx O K 3 O L P L J PL P L P x N K O y _
CHAPTER 6 CONTROL SYSTEMS YEAR TO MARKS MCQ 6. The tate variable decription of an LTI ytem i given by Jxo N J a NJx N JN K O K OK O K O xo a x + u Kxo O K 3 a3 OKx O K 3 O L P L J PL P L P x N K O y _
ECE Linear Circuit Analysis II
 ECE 202 - Linear Circuit Analyi II Final Exam Solution December 9, 2008 Solution Breaking F into partial fraction, F 2 9 9 + + 35 9 ft δt + [ + 35e 9t ]ut A 9 Hence 3 i the correct anwer. Solution 2 ft
ECE 202 - Linear Circuit Analyi II Final Exam Solution December 9, 2008 Solution Breaking F into partial fraction, F 2 9 9 + + 35 9 ft δt + [ + 35e 9t ]ut A 9 Hence 3 i the correct anwer. Solution 2 ft
Massachusetts Institute of Technology Dynamics and Control II
 I E Maachuett Intitute of Technology Department of Mechanical Engineering 2.004 Dynamic and Control II Laboratory Seion 5: Elimination of Steady-State Error Uing Integral Control Action 1 Laboratory Objective:
I E Maachuett Intitute of Technology Department of Mechanical Engineering 2.004 Dynamic and Control II Laboratory Seion 5: Elimination of Steady-State Error Uing Integral Control Action 1 Laboratory Objective:
Control Systems. Laplace domain analysis
 Control Systems Laplace domain analysis L. Lanari outline introduce the Laplace unilateral transform define its properties show its advantages in turning ODEs to algebraic equations define an Input/Output
Control Systems Laplace domain analysis L. Lanari outline introduce the Laplace unilateral transform define its properties show its advantages in turning ODEs to algebraic equations define an Input/Output
6.302 Feedback Systems Recitation 6: Steady-State Errors Prof. Joel L. Dawson S -
 6302 Feedback ytem Recitation 6: teadytate Error Prof Joel L Dawon A valid performance metric for any control ytem center around the final error when the ytem reache teadytate That i, after all initial
6302 Feedback ytem Recitation 6: teadytate Error Prof Joel L Dawon A valid performance metric for any control ytem center around the final error when the ytem reache teadytate That i, after all initial
Chap 4. State-Space Solutions and
 Chap 4. State-Space Solutions and Realizations Outlines 1. Introduction 2. Solution of LTI State Equation 3. Equivalent State Equations 4. Realizations 5. Solution of Linear Time-Varying (LTV) Equations
Chap 4. State-Space Solutions and Realizations Outlines 1. Introduction 2. Solution of LTI State Equation 3. Equivalent State Equations 4. Realizations 5. Solution of Linear Time-Varying (LTV) Equations
Behavioral thermal modeling for quad-core microprocessors
 Behavioral thermal modeling for quad-core microproceor Duo Li and Sheldon X.-D. Tan Department of Electrical Engineering Univerity of California, Riveride, CA Murli Tirumala Intel Corporation Outline Introduction
Behavioral thermal modeling for quad-core microproceor Duo Li and Sheldon X.-D. Tan Department of Electrical Engineering Univerity of California, Riveride, CA Murli Tirumala Intel Corporation Outline Introduction
f sends 1 to 2, so f 1 sends 2 back to 1. f sends 2 to 4, so f 1 sends 4 back to 2. f 1 = { (2,1), (4,2), (6,3), (1,4), (3,5), (5,6) }.
, (4,2), (6,3), (1,4), (3,5), (5,6) }.") .3 Inverse Functions an their Derivatives In this unit you ll review inverse unctions, how to in them, an how the graphs o unctions an their inverses are relate geometrically. Not all unctions can be unone,
.3 Inverse Functions an their Derivatives In this unit you ll review inverse unctions, how to in them, an how the graphs o unctions an their inverses are relate geometrically. Not all unctions can be unone,
7.2 INVERSE TRANSFORMS AND TRANSFORMS OF DERIVATIVES 281
 72 INVERSE TRANSFORMS AND TRANSFORMS OF DERIVATIVES 28 and i 2 Show how Euler formula (page 33) can then be ued to deduce the reult a ( a) 2 b 2 {e at co bt} {e at in bt} b ( a) 2 b 2 5 Under what condition
72 INVERSE TRANSFORMS AND TRANSFORMS OF DERIVATIVES 28 and i 2 Show how Euler formula (page 33) can then be ued to deduce the reult a ( a) 2 b 2 {e at co bt} {e at in bt} b ( a) 2 b 2 5 Under what condition
Implicit Differentiation and Related Rates
 Implicit Differentiation an Relate Rates Up until now ou have been fining the erivatives of functions that have alrea been solve for their epenent variable. However, there are some functions that cannot
Implicit Differentiation an Relate Rates Up until now ou have been fining the erivatives of functions that have alrea been solve for their epenent variable. However, there are some functions that cannot
Math 180, Exam 2, Fall 2012 Problem 1 Solution. (a) The derivative is computed using the Chain Rule twice. 1 2 x x
 The derivative is computed using the Chain Rule twice. 1 2 x x") . Fin erivatives of the following functions: (a) f() = tan ( 2 + ) ( ) 2 (b) f() = ln 2 + (c) f() = sin() Solution: Math 80, Eam 2, Fall 202 Problem Solution (a) The erivative is compute using the Chain
. Fin erivatives of the following functions: (a) f() = tan ( 2 + ) ( ) 2 (b) f() = ln 2 + (c) f() = sin() Solution: Math 80, Eam 2, Fall 202 Problem Solution (a) The erivative is compute using the Chain
R. W. Erickson. Department of Electrical, Computer, and Energy Engineering University of Colorado, Boulder
 R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder Cloed-loop buck converter example: Section 9.5.4 In ECEN 5797, we ued the CCM mall ignal model to
R. W. Erickon Department of Electrical, Computer, and Energy Engineering Univerity of Colorado, Boulder Cloed-loop buck converter example: Section 9.5.4 In ECEN 5797, we ued the CCM mall ignal model to