Today. Introduction to optimization Definition and motivation 1-dimensional methods. Multi-dimensional methods. General strategies, value-only methods
|
|
|
- Jewel Shields
- 6 years ago
- Views:
Transcription
1 Optimization
2 Last time Root inding: deinition, motivation Algorithms: Bisection, alse position, secant, Newton-Raphson Convergence & tradeos Eample applications o Newton s method Root inding in > 1 dimension
3 Today Introduction to optimization Deinition and motivation 1-dimensional methods Golden section, discussion o error Newton s method Multi-dimensional methods Newton s method, steepest descent, conjugate gradient General strategies, value-only methods



4 Ingredients Objective unction Variables Constraints Find values o the variables that minimize or maimize the objective unction while satisying the constraints

5 Dierent Kinds o Optimization Figure rom: Optimization Technology Center
6 Dierent Optimization Techniques Algorithms have very dierent lavor depending on speciic problem Closed orm vs. numerical vs. discrete Local vs. global minima Running times ranging rom O(1) to NP-hard Today: Focus on continuous numerical methods
7 Optimization in 1-D Look or analogies to bracketing in root-inding What does it mean to bracket a minimum? ( let, ( let )) ( right, ( right )) ( mid, ( mid )) let < mid < right ( mid ) < ( let ) ( mid ) < ( right )
8 Optimization in 1-D Once we have these properties, there is at least one local minimum between let and right Establishing bracket initially: Given initial, increment Evaluate ( initial ), ( initial +increment) I decreasing, step until ind an increase Else, step in opposite direction until ind an increase Grow increment (by a constant actor) at each step For maimization: substitute or
9 Optimization in 1-D Strategy: evaluate unction at some new ( let, ( let )) ( right, ( right )) ( new, ( new )) ( mid, ( mid ))
10 Optimization in 1-D Strategy: evaluate unction at some new Here, new bracket points are new, mid, right ( let, ( let )) ( right, ( right )) ( new, ( new )) ( mid, ( mid ))

) ( new, ( new )) ( mid, (")
11 Optimization in 1-D Strategy: evaluate unction at some new Here, new bracket points are let, new, mid ( let, ( let )) ( right, ( right )) ( new, ( new )) ( mid, ( mid ))
12 Optimization in 1-D Unlike with root-inding, can t always guarantee that interval will be reduced by a actor o 2 Let s ind the optimal place or mid, relative to let and right, that will guarantee same actor o reduction regardless o outcome
13 Optimization in 1-D α α 2 1-α 2 =α i ( new ) < ( mid ) new interval = α else new interval = 1 α 2

14 Golden Section Search To assure same interval, want α = 1 α 2 So, α = = Φ This is the reciprocal o the golden ratio = So, interval decreases by 30% per iteration Linear convergence
15 Sources o Error When we ind a minimum value,, why is it dierent rom true minimum min? 1. Obvious: width o bracket min right let 2. Less obvious: loating point representation ( min ) ( min ( ) ) ε mach
16 Stopping Criterion or Golden Section Q: When is ( right let ) small enough that discrepancy between and min limited by rounding error in ( min )? Use Taylor series, knowing that ( min ) is around ( ) ( min) 0 2 ( min)( min) So, the condition ( min ) ( ) min ( ) ε mach holds where min ε mach 2 ( ( min min ) )
17 Implications Rule o thumb: pointless to ask or more accuracy than sqrt(ε ) Q:, what happens to # o accurate digits in results when you switch rom single precision (~7 digits) to double (~16 digits) or, ()? A: Gain only ~4 more accurate digits.
18 Faster 1-D Optimization Trade o super-linear convergence or worse robustness Combine with Golden Section search or saety Usual bag o tricks: Fit parabola through 3 points, ind minimum Compute derivatives as well as positions, it cubic Use second derivatives: Newton
19 Newton s Method
20 Newton s Method
21 Newton s Method
22 Newton s Method
23 Newton s Method At each step: k + 1 = k ( ( k k ) ) Requires 1 st and 2 nd derivatives Quadratic convergence
24 Questions?
25 Multidimensional Optimization
26
27 Multi-Dimensional Optimization Important in many areas Finding best design in some parameter space Fitting a model to measured data Hard in general Multiple etrema, saddles, curved/elongated valleys, etc. Can t bracket (but there are trust region methods) In general, easier than rootinding Can always walk downhill Minimizing one scalar unction, not simultaneously satisying multiple unctions

28 Problem with Saddle
, ( y y y y H")
29 Newton s Method in Multiple Dimensions Replace 1 st derivative with gradient, 2 nd derivative with Hessian = = ), ( y y y y H y
 ( ) ( 1 1 k k k k H = + ) ( ) ( 1 k k k")
30 Newton s Method in Multiple Dimensions in 1 dimension: Replace 1 st derivative with gradient, 2 nd derivative with Hessian So, Can be ragile unless unction smooth and starting close to minimum ) ( ) ( 1 1 k k k k H = + ) ( ) ( 1 k k k k = +
31 Other Methods What i you can t / don t want to use 2 nd derivative? Quasi-Newton methods estimate Hessian Alternative: walk along (negative o) gradient Perorm 1-D minimization along line passing through current point in the direction o the gradient Once done, re-compute gradient, iterate
32 Steepest Descent
33 Problem With Steepest Descent
")
34 Conjugate Gradient Methods Idea: avoid undoing minimization that s already been done Walk along direction d k + 1 = gk β d where g is gradient Polak and Ribiere ormula: β k = T g k + k + 1 T k gk k ( g 1 g g k k )
35 Conjugate Gradient Methods Conjugate gradient implicitly obtains inormation about Hessian For quadratic unction in n dimensions, gets eact solution in n steps (ignoring roundo error) Works well in practice
 gradients: = + + + δ δ δ δ δ δ ) ( ) ( ) ( ) ( ) ( ) ( 3 2 1 3 2 1 ) ( e e e")
36 Value-Only Methods in Multi-Dimensions I can t evaluate gradients, lie is hard Can use approimate (numerically evaluated) gradients: = δ δ δ δ δ δ ) ( ) ( ) ( ) ( ) ( ) ( ) ( e e e e e e
37 Generic Optimization Strategies Uniorm sampling Cost rises eponentially with # o dimensions Heuristic: compass search Try a step along each coordinate in turn I can t ind a lower value, halve step size
38 Generic Optimization Strategies Simulated annealing: Maintain a temperature T Pick random direction d, and try a step o size dependent on T I value lower than current, accept I value higher than current, accept with probability ~ ep(( ( current ) ( new )) / T) Annealing schedule how ast does T decrease? Slow but robust: can avoid non-global minima
39 Downhill Simple Method (Nelder-Mead) Keep track o n+1 points in n dimensions Vertices o a simple (triangle in 2D tetrahedron in 3D, etc.) At each iteration: simple can move, epand, or contract Sometimes known as amoeba method: simple oozes along the unction

40 Downhill Simple Method (Nelder-Mead) Basic operation: relection location probed by relection step worst point (highest unction value)

41 Downhill Simple Method (Nelder-Mead) I relection resulted in best (lowest) value so ar, try an epansion location probed by epansion step Else, i relection helped at all, keep it
42 Downhill Simple Method (Nelder-Mead) I relection didn t help (relected point still worst) try a contraction location probed by contration step

43 Downhill Simple Method (Nelder-Mead) I all else ails shrink the simple around the best point
44 Downhill Simple Method (Nelder-Mead) Method airly eicient at each iteration (typically 1-2 unction evaluations) Can take lots o iterations Somewhat lakey sometimes needs restart ater simple collapses on itsel, etc. Beneits: simple to implement, doesn t need derivative, doesn t care about unction smoothness, etc.

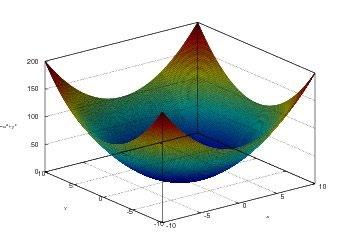
45 Rosenbrock s Function 2 2 (, y) = 100( y ) + (1 Designed speciically or testing optimization techniques Curved, narrow valley ) 2
46 Demo
47 Global Optimization In general, can t guarantee that you ve ound global (rather than local) minimum Some heuristics: Multi-start: try local optimization rom several starting positions Very slow simulated annealing Use analytical methods (or graphing) to determine behavior, guide methods to correct neighborhoods
48 Sotware notes
49 Sotware Matlab: minbnd For unction o 1 variable with bound constraints Based on golden section & parabolic interpolation () doesn t need to be deined at endpoints minsearch Simple method (i.e., no derivative needed) Optimization Toolbo (available Princeton) meshgrid sur Ecel: Solver
(One Dimension) Problem: for a function f(x), find x 0 such that f(x 0 ) = 0. f(x)
 Problem: for a function f(x), find x 0 such that f(x 0 ) = 0. f(x)") Solving Nonlinear Equations & Optimization One Dimension Problem: or a unction, ind 0 such that 0 = 0. 0 One Root: The Bisection Method This one s guaranteed to converge at least to a singularity, i not
Solving Nonlinear Equations & Optimization One Dimension Problem: or a unction, ind 0 such that 0 = 0. 0 One Root: The Bisection Method This one s guaranteed to converge at least to a singularity, i not
Lecture 8 Optimization
 4/9/015 Lecture 8 Optimization EE 4386/5301 Computational Methods in EE Spring 015 Optimization 1 Outline Introduction 1D Optimization Parabolic interpolation Golden section search Newton s method Multidimensional
4/9/015 Lecture 8 Optimization EE 4386/5301 Computational Methods in EE Spring 015 Optimization 1 Outline Introduction 1D Optimization Parabolic interpolation Golden section search Newton s method Multidimensional
Lecture 7: Minimization or maximization of functions (Recipes Chapter 10)
") Lecture 7: Minimization or maximization of functions (Recipes Chapter 10) Actively studied subject for several reasons: Commonly encountered problem: e.g. Hamilton s and Lagrange s principles, economics
Lecture 7: Minimization or maximization of functions (Recipes Chapter 10) Actively studied subject for several reasons: Commonly encountered problem: e.g. Hamilton s and Lagrange s principles, economics
Numerical optimization
 THE UNIVERSITY OF WESTERN ONTARIO LONDON ONTARIO Paul Klein Office: SSC 408 Phone: 661-111 ext. 857 Email: paul.klein@uwo.ca URL: www.ssc.uwo.ca/economics/faculty/klein/ Numerical optimization In these
THE UNIVERSITY OF WESTERN ONTARIO LONDON ONTARIO Paul Klein Office: SSC 408 Phone: 661-111 ext. 857 Email: paul.klein@uwo.ca URL: www.ssc.uwo.ca/economics/faculty/klein/ Numerical optimization In these
Root Finding and Optimization
 Root Finding and Optimization Ramses van Zon SciNet, University o Toronto Scientiic Computing Lecture 11 February 11, 2014 Root Finding It is not uncommon in scientiic computing to want solve an equation
Root Finding and Optimization Ramses van Zon SciNet, University o Toronto Scientiic Computing Lecture 11 February 11, 2014 Root Finding It is not uncommon in scientiic computing to want solve an equation
18-660: Numerical Methods for Engineering Design and Optimization
 8-66: Numerical Methods or Engineering Design and Optimization Xin Li Department o ECE Carnegie Mellon University Pittsburgh, PA 53 Slide Overview Linear Regression Ordinary least-squares regression Minima
8-66: Numerical Methods or Engineering Design and Optimization Xin Li Department o ECE Carnegie Mellon University Pittsburgh, PA 53 Slide Overview Linear Regression Ordinary least-squares regression Minima
CISE-301: Numerical Methods Topic 1:
 CISE-3: Numerical Methods Topic : Introduction to Numerical Methods and Taylor Series Lectures -4: KFUPM Term 9 Section 8 CISE3_Topic KFUPM - T9 - Section 8 Lecture Introduction to Numerical Methods What
CISE-3: Numerical Methods Topic : Introduction to Numerical Methods and Taylor Series Lectures -4: KFUPM Term 9 Section 8 CISE3_Topic KFUPM - T9 - Section 8 Lecture Introduction to Numerical Methods What
Unconstrained Multivariate Optimization
 Unconstrained Multivariate Optimization Multivariate optimization means optimization of a scalar function of a several variables: and has the general form: y = () min ( ) where () is a nonlinear scalar-valued
Unconstrained Multivariate Optimization Multivariate optimization means optimization of a scalar function of a several variables: and has the general form: y = () min ( ) where () is a nonlinear scalar-valued
Finding roots. Lecture 4
 Finding roots Lecture 4 Finding roots: Find such that 0 or given. Bisection method: The intermediate value theorem states the obvious: i a continuous unction changes sign within a given interval, it has
Finding roots Lecture 4 Finding roots: Find such that 0 or given. Bisection method: The intermediate value theorem states the obvious: i a continuous unction changes sign within a given interval, it has
Objectives. By the time the student is finished with this section of the workbook, he/she should be able
 FUNCTIONS Quadratic Functions......8 Absolute Value Functions.....48 Translations o Functions..57 Radical Functions...61 Eponential Functions...7 Logarithmic Functions......8 Cubic Functions......91 Piece-Wise
FUNCTIONS Quadratic Functions......8 Absolute Value Functions.....48 Translations o Functions..57 Radical Functions...61 Eponential Functions...7 Logarithmic Functions......8 Cubic Functions......91 Piece-Wise
Lecture 34 Minimization and maximization of functions
 Lecture 34 Minimization and maximization of functions Introduction Golden section search Parabolic interpolation Search with first derivatives Downhill simplex method Introduction In a nutshell, you are
Lecture 34 Minimization and maximization of functions Introduction Golden section search Parabolic interpolation Search with first derivatives Downhill simplex method Introduction In a nutshell, you are
1 Numerical optimization
 Contents 1 Numerical optimization 5 1.1 Optimization of single-variable functions............ 5 1.1.1 Golden Section Search................... 6 1.1. Fibonacci Search...................... 8 1. Algorithms
Contents 1 Numerical optimization 5 1.1 Optimization of single-variable functions............ 5 1.1.1 Golden Section Search................... 6 1.1. Fibonacci Search...................... 8 1. Algorithms
Nonlinear Equations. Chapter The Bisection Method
 Chapter 6 Nonlinear Equations Given a nonlinear function f(), a value r such that f(r) = 0, is called a root or a zero of f() For eample, for f() = e 016064, Fig?? gives the set of points satisfying y
Chapter 6 Nonlinear Equations Given a nonlinear function f(), a value r such that f(r) = 0, is called a root or a zero of f() For eample, for f() = e 016064, Fig?? gives the set of points satisfying y
1 Numerical optimization
 Contents Numerical optimization 5. Optimization of single-variable functions.............................. 5.. Golden Section Search..................................... 6.. Fibonacci Search........................................
Contents Numerical optimization 5. Optimization of single-variable functions.............................. 5.. Golden Section Search..................................... 6.. Fibonacci Search........................................
Syllabus Objective: 2.9 The student will sketch the graph of a polynomial, radical, or rational function.
 Precalculus Notes: Unit Polynomial Functions Syllabus Objective:.9 The student will sketch the graph o a polynomial, radical, or rational unction. Polynomial Function: a unction that can be written in
Precalculus Notes: Unit Polynomial Functions Syllabus Objective:.9 The student will sketch the graph o a polynomial, radical, or rational unction. Polynomial Function: a unction that can be written in
Optimization. Totally not complete this is...don't use it yet...
 Optimization Totally not complete this is...don't use it yet... Bisection? Doing a root method is akin to doing a optimization method, but bi-section would not be an effective method - can detect sign
Optimization Totally not complete this is...don't use it yet... Bisection? Doing a root method is akin to doing a optimization method, but bi-section would not be an effective method - can detect sign
Motivation: We have already seen an example of a system of nonlinear equations when we studied Gaussian integration (p.8 of integration notes)
") AMSC/CMSC 460 Computational Methods, Fall 2007 UNIT 5: Nonlinear Equations Dianne P. O Leary c 2001, 2002, 2007 Solving Nonlinear Equations and Optimization Problems Read Chapter 8. Skip Section 8.1.1.
AMSC/CMSC 460 Computational Methods, Fall 2007 UNIT 5: Nonlinear Equations Dianne P. O Leary c 2001, 2002, 2007 Solving Nonlinear Equations and Optimization Problems Read Chapter 8. Skip Section 8.1.1.
Exploring the energy landscape
 Exploring the energy landscape ChE210D Today's lecture: what are general features of the potential energy surface and how can we locate and characterize minima on it Derivatives of the potential energy
Exploring the energy landscape ChE210D Today's lecture: what are general features of the potential energy surface and how can we locate and characterize minima on it Derivatives of the potential energy
Math 2412 Activity 1(Due by EOC Sep. 17)
") Math 4 Activity (Due by EOC Sep. 7) Determine whether each relation is a unction.(indicate why or why not.) Find the domain and range o each relation.. 4,5, 6,7, 8,8. 5,6, 5,7, 6,6, 6,7 Determine whether
Math 4 Activity (Due by EOC Sep. 7) Determine whether each relation is a unction.(indicate why or why not.) Find the domain and range o each relation.. 4,5, 6,7, 8,8. 5,6, 5,7, 6,6, 6,7 Determine whether
y2 = 0. Show that u = e2xsin(2y) satisfies Laplace's equation.
 satisfies Laplace's equation.") Review 1 1) State the largest possible domain o deinition or the unction (, ) = 3 - ) Determine the largest set o points in the -plane on which (, ) = sin-1( - ) deines a continuous unction 3) Find the
Review 1 1) State the largest possible domain o deinition or the unction (, ) = 3 - ) Determine the largest set o points in the -plane on which (, ) = sin-1( - ) deines a continuous unction 3) Find the
ECE 595, Section 10 Numerical Simulations Lecture 7: Optimization and Eigenvalues. Prof. Peter Bermel January 23, 2013
 ECE 595, Section 10 Numerical Simulations Lecture 7: Optimization and Eigenvalues Prof. Peter Bermel January 23, 2013 Outline Recap from Friday Optimization Methods Brent s Method Golden Section Search
ECE 595, Section 10 Numerical Simulations Lecture 7: Optimization and Eigenvalues Prof. Peter Bermel January 23, 2013 Outline Recap from Friday Optimization Methods Brent s Method Golden Section Search
Scientific Computing: Optimization
 Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
Scientific Computing: Optimization Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 Course MATH-GA.2043 or CSCI-GA.2112, Spring 2012 March 8th, 2011 A. Donev (Courant Institute) Lecture
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Multidimensional Unconstrained Optimization Suppose we have a function f() of more than one
CPSC 540: Machine Learning
 CPSC 540: Machine Learning First-Order Methods, L1-Regularization, Coordinate Descent Winter 2016 Some images from this lecture are taken from Google Image Search. Admin Room: We ll count final numbers
CPSC 540: Machine Learning First-Order Methods, L1-Regularization, Coordinate Descent Winter 2016 Some images from this lecture are taken from Google Image Search. Admin Room: We ll count final numbers
Lecture V. Numerical Optimization
 Lecture V Numerical Optimization Gianluca Violante New York University Quantitative Macroeconomics G. Violante, Numerical Optimization p. 1 /19 Isomorphism I We describe minimization problems: to maximize
Lecture V Numerical Optimization Gianluca Violante New York University Quantitative Macroeconomics G. Violante, Numerical Optimization p. 1 /19 Isomorphism I We describe minimization problems: to maximize
EAD 115. Numerical Solution of Engineering and Scientific Problems. David M. Rocke Department of Applied Science
 EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
EAD 115 Numerical Solution of Engineering and Scientific Problems David M. Rocke Department of Applied Science Taylor s Theorem Can often approximate a function by a polynomial The error in the approximation
Section 1.2 Domain and Range
 Section 1. Domain and Range 1 Section 1. Domain and Range One o our main goals in mathematics is to model the real world with mathematical unctions. In doing so, it is important to keep in mind the limitations
Section 1. Domain and Range 1 Section 1. Domain and Range One o our main goals in mathematics is to model the real world with mathematical unctions. In doing so, it is important to keep in mind the limitations
8 Numerical methods for unconstrained problems
 8 Numerical methods for unconstrained problems Optimization is one of the important fields in numerical computation, beside solving differential equations and linear systems. We can see that these fields
8 Numerical methods for unconstrained problems Optimization is one of the important fields in numerical computation, beside solving differential equations and linear systems. We can see that these fields
Chapter 6. Nonlinear Equations. 6.1 The Problem of Nonlinear Root-finding. 6.2 Rate of Convergence
 Chapter 6 Nonlinear Equations 6. The Problem of Nonlinear Root-finding In this module we consider the problem of using numerical techniques to find the roots of nonlinear equations, f () =. Initially we
Chapter 6 Nonlinear Equations 6. The Problem of Nonlinear Root-finding In this module we consider the problem of using numerical techniques to find the roots of nonlinear equations, f () =. Initially we
Algebra II Notes Inverse Functions Unit 1.2. Inverse of a Linear Function. Math Background
 Algebra II Notes Inverse Functions Unit 1. Inverse o a Linear Function Math Background Previously, you Perormed operations with linear unctions Identiied the domain and range o linear unctions In this
Algebra II Notes Inverse Functions Unit 1. Inverse o a Linear Function Math Background Previously, you Perormed operations with linear unctions Identiied the domain and range o linear unctions In this
Order of convergence. MA3232 Numerical Analysis Week 3 Jack Carl Kiefer ( ) Question: How fast does x n
 Question: How fast does x n") Week 3 Jack Carl Kiefer (94-98) Jack Kiefer was an American statistician. Much of his research was on the optimal design of eperiments. However, he also made significant contributions to other areas of
Week 3 Jack Carl Kiefer (94-98) Jack Kiefer was an American statistician. Much of his research was on the optimal design of eperiments. However, he also made significant contributions to other areas of
Example - Newton-Raphson Method
 Eample - Newton-Raphson Method We now consider the following eample: minimize f( 3 3 + -- 4 4 Since f ( 3 2 + 3 3 and f ( 6 + 9 2 we form the following iteration: + n 3 ( n 3 3( n 2 ------------------------------------
Eample - Newton-Raphson Method We now consider the following eample: minimize f( 3 3 + -- 4 4 Since f ( 3 2 + 3 3 and f ( 6 + 9 2 we form the following iteration: + n 3 ( n 3 3( n 2 ------------------------------------
Physics 403. Segev BenZvi. Numerical Methods, Maximum Likelihood, and Least Squares. Department of Physics and Astronomy University of Rochester
 Physics 403 Numerical Methods, Maximum Likelihood, and Least Squares Segev BenZvi Department of Physics and Astronomy University of Rochester Table of Contents 1 Review of Last Class Quadratic Approximation
Physics 403 Numerical Methods, Maximum Likelihood, and Least Squares Segev BenZvi Department of Physics and Astronomy University of Rochester Table of Contents 1 Review of Last Class Quadratic Approximation
Section 3.4: Concavity and the second Derivative Test. Find any points of inflection of the graph of a function.
 Unit 3: Applications o Dierentiation Section 3.4: Concavity and the second Derivative Test Determine intervals on which a unction is concave upward or concave downward. Find any points o inlection o the
Unit 3: Applications o Dierentiation Section 3.4: Concavity and the second Derivative Test Determine intervals on which a unction is concave upward or concave downward. Find any points o inlection o the
Lab on Taylor Polynomials. This Lab is accompanied by an Answer Sheet that you are to complete and turn in to your instructor.
 Lab on Taylor Polynomials This Lab is accompanied by an Answer Sheet that you are to complete and turn in to your instructor. In this Lab we will approimate complicated unctions by simple unctions. The
Lab on Taylor Polynomials This Lab is accompanied by an Answer Sheet that you are to complete and turn in to your instructor. In this Lab we will approimate complicated unctions by simple unctions. The
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 6 Optimization Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Numerical Optimization Professor Horst Cerjak, Horst Bischof, Thomas Pock Mat Vis-Gra SS09
 Numerical Optimization 1 Working Horse in Computer Vision Variational Methods Shape Analysis Machine Learning Markov Random Fields Geometry Common denominator: optimization problems 2 Overview of Methods
Numerical Optimization 1 Working Horse in Computer Vision Variational Methods Shape Analysis Machine Learning Markov Random Fields Geometry Common denominator: optimization problems 2 Overview of Methods
1. Method 1: bisection. The bisection methods starts from two points a 0 and b 0 such that
 Chapter 4 Nonlinear equations 4.1 Root finding Consider the problem of solving any nonlinear relation g(x) = h(x) in the real variable x. We rephrase this problem as one of finding the zero (root) of a
Chapter 4 Nonlinear equations 4.1 Root finding Consider the problem of solving any nonlinear relation g(x) = h(x) in the real variable x. We rephrase this problem as one of finding the zero (root) of a
Higher-Order Methods
 Higher-Order Methods Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. PCMI, July 2016 Stephen Wright (UW-Madison) Higher-Order Methods PCMI, July 2016 1 / 25 Smooth
Higher-Order Methods Stephen J. Wright 1 2 Computer Sciences Department, University of Wisconsin-Madison. PCMI, July 2016 Stephen Wright (UW-Madison) Higher-Order Methods PCMI, July 2016 1 / 25 Smooth
Numerical Methods - Lecture 2. Numerical Methods. Lecture 2. Analysis of errors in numerical methods
 Numerical Methods - Lecture 1 Numerical Methods Lecture. Analysis o errors in numerical methods Numerical Methods - Lecture Why represent numbers in loating point ormat? Eample 1. How a number 56.78 can
Numerical Methods - Lecture 1 Numerical Methods Lecture. Analysis o errors in numerical methods Numerical Methods - Lecture Why represent numbers in loating point ormat? Eample 1. How a number 56.78 can
FALL 2018 MATH 4211/6211 Optimization Homework 4
 FALL 2018 MATH 4211/6211 Optimization Homework 4 This homework assignment is open to textbook, reference books, slides, and online resources, excluding any direct solution to the problem (such as solution
FALL 2018 MATH 4211/6211 Optimization Homework 4 This homework assignment is open to textbook, reference books, slides, and online resources, excluding any direct solution to the problem (such as solution
Optimization: Nonlinear Optimization without Constraints. Nonlinear Optimization without Constraints 1 / 23
 Optimization: Nonlinear Optimization without Constraints Nonlinear Optimization without Constraints 1 / 23 Nonlinear optimization without constraints Unconstrained minimization min x f(x) where f(x) is
Optimization: Nonlinear Optimization without Constraints Nonlinear Optimization without Constraints 1 / 23 Nonlinear optimization without constraints Unconstrained minimization min x f(x) where f(x) is
Numerical Methods I Solving Nonlinear Equations
 Numerical Methods I Solving Nonlinear Equations Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 October 16th, 2014 A. Donev (Courant Institute)
Numerical Methods I Solving Nonlinear Equations Aleksandar Donev Courant Institute, NYU 1 donev@courant.nyu.edu 1 MATH-GA 2011.003 / CSCI-GA 2945.003, Fall 2014 October 16th, 2014 A. Donev (Courant Institute)
This is only a list of questions use a separate sheet to work out the problems. 1. (1.2 and 1.4) Use the given graph to answer each question.
 Use the given graph to answer each question.") Mth Calculus Practice Eam Questions NOTE: These questions should not be taken as a complete list o possible problems. The are merel intended to be eamples o the diicult level o the regular eam questions.
Mth Calculus Practice Eam Questions NOTE: These questions should not be taken as a complete list o possible problems. The are merel intended to be eamples o the diicult level o the regular eam questions.
Scattered Data Approximation of Noisy Data via Iterated Moving Least Squares
 Scattered Data Approximation o Noisy Data via Iterated Moving Least Squares Gregory E. Fasshauer and Jack G. Zhang Abstract. In this paper we ocus on two methods or multivariate approximation problems
Scattered Data Approximation o Noisy Data via Iterated Moving Least Squares Gregory E. Fasshauer and Jack G. Zhang Abstract. In this paper we ocus on two methods or multivariate approximation problems
Numerical Optimization
 Numerical Optimization General Setup Let (. be a unction such that bn R R where b is a vector o unnown parameters. In many cases, b will not have a closed orm solution. We will estimate b by minimizing
Numerical Optimization General Setup Let (. be a unction such that bn R R where b is a vector o unnown parameters. In many cases, b will not have a closed orm solution. We will estimate b by minimizing
Gradient Descent. Sargur Srihari
 Gradient Descent Sargur srihari@cedar.buffalo.edu 1 Topics Simple Gradient Descent/Ascent Difficulties with Simple Gradient Descent Line Search Brent s Method Conjugate Gradient Descent Weight vectors
Gradient Descent Sargur srihari@cedar.buffalo.edu 1 Topics Simple Gradient Descent/Ascent Difficulties with Simple Gradient Descent Line Search Brent s Method Conjugate Gradient Descent Weight vectors
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 5 Nonlinear Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
Scientific Computing: An Introductory Survey Chapter 5 Nonlinear Equations Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
Outline. Scientific Computing: An Introductory Survey. Optimization. Optimization Problems. Examples: Optimization Problems
 Outline Scientific Computing: An Introductory Survey Chapter 6 Optimization 1 Prof. Michael. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
Outline Scientific Computing: An Introductory Survey Chapter 6 Optimization 1 Prof. Michael. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction
A Primer on Multidimensional Optimization
 A Primer on Multidimensional Optimization Prof. Dr. Florian Rupp German University of Technology in Oman (GUtech) Introduction to Numerical Methods for ENG & CS (Mathematics IV) Spring Term 2016 Eercise
A Primer on Multidimensional Optimization Prof. Dr. Florian Rupp German University of Technology in Oman (GUtech) Introduction to Numerical Methods for ENG & CS (Mathematics IV) Spring Term 2016 Eercise
Solution of Nonlinear Equations
 Solution of Nonlinear Equations (Com S 477/577 Notes) Yan-Bin Jia Sep 14, 017 One of the most frequently occurring problems in scientific work is to find the roots of equations of the form f(x) = 0. (1)
Solution of Nonlinear Equations (Com S 477/577 Notes) Yan-Bin Jia Sep 14, 017 One of the most frequently occurring problems in scientific work is to find the roots of equations of the form f(x) = 0. (1)
RATIONAL FUNCTIONS. Finding Asymptotes..347 The Domain Finding Intercepts Graphing Rational Functions
 RATIONAL FUNCTIONS Finding Asymptotes..347 The Domain....350 Finding Intercepts.....35 Graphing Rational Functions... 35 345 Objectives The ollowing is a list o objectives or this section o the workbook.
RATIONAL FUNCTIONS Finding Asymptotes..347 The Domain....350 Finding Intercepts.....35 Graphing Rational Functions... 35 345 Objectives The ollowing is a list o objectives or this section o the workbook.
A Simple Explanation of the Sobolev Gradient Method
 A Simple Explanation o the Sobolev Gradient Method R. J. Renka July 3, 2006 Abstract We have observed that the term Sobolev gradient is used more oten than it is understood. Also, the term is oten used
A Simple Explanation o the Sobolev Gradient Method R. J. Renka July 3, 2006 Abstract We have observed that the term Sobolev gradient is used more oten than it is understood. Also, the term is oten used
Practical Numerical Methods in Physics and Astronomy. Lecture 5 Optimisation and Search Techniques
 Practical Numerical Methods in Physics and Astronomy Lecture 5 Optimisation and Search Techniques Pat Scott Department of Physics, McGill University January 30, 2013 Slides available from http://www.physics.mcgill.ca/
Practical Numerical Methods in Physics and Astronomy Lecture 5 Optimisation and Search Techniques Pat Scott Department of Physics, McGill University January 30, 2013 Slides available from http://www.physics.mcgill.ca/
Fitting The Unknown 1/28. Joshua Lande. September 1, Stanford
 1/28 Fitting The Unknown Joshua Lande Stanford September 1, 2010 2/28 Motivation: Why Maximize It is frequently important in physics to find the maximum (or minimum) of a function Nature will maximize
1/28 Fitting The Unknown Joshua Lande Stanford September 1, 2010 2/28 Motivation: Why Maximize It is frequently important in physics to find the maximum (or minimum) of a function Nature will maximize
Optimization Methods
 Optimization Methods Decision making Examples: determining which ingredients and in what quantities to add to a mixture being made so that it will meet specifications on its composition allocating available
Optimization Methods Decision making Examples: determining which ingredients and in what quantities to add to a mixture being made so that it will meet specifications on its composition allocating available
Nonlinear Optimization
 Nonlinear Optimization (Com S 477/577 Notes) Yan-Bin Jia Nov 7, 2017 1 Introduction Given a single function f that depends on one or more independent variable, we want to find the values of those variables
Nonlinear Optimization (Com S 477/577 Notes) Yan-Bin Jia Nov 7, 2017 1 Introduction Given a single function f that depends on one or more independent variable, we want to find the values of those variables
Differentiation. The main problem of differential calculus deals with finding the slope of the tangent line at a point on a curve.
 Dierentiation The main problem o dierential calculus deals with inding the slope o the tangent line at a point on a curve. deinition() : The slope o a curve at a point p is the slope, i it eists, o the
Dierentiation The main problem o dierential calculus deals with inding the slope o the tangent line at a point on a curve. deinition() : The slope o a curve at a point p is the slope, i it eists, o the
8.4 Inverse Functions
 Section 8. Inverse Functions 803 8. Inverse Functions As we saw in the last section, in order to solve application problems involving eponential unctions, we will need to be able to solve eponential equations
Section 8. Inverse Functions 803 8. Inverse Functions As we saw in the last section, in order to solve application problems involving eponential unctions, we will need to be able to solve eponential equations
Chapter 6 Reliability-based design and code developments
 Chapter 6 Reliability-based design and code developments 6. General Reliability technology has become a powerul tool or the design engineer and is widely employed in practice. Structural reliability analysis
Chapter 6 Reliability-based design and code developments 6. General Reliability technology has become a powerul tool or the design engineer and is widely employed in practice. Structural reliability analysis
Quadratic Functions. The graph of the function shifts right 3. The graph of the function shifts left 3.
 Quadratic Functions The translation o a unction is simpl the shiting o a unction. In this section, or the most part, we will be graphing various unctions b means o shiting the parent unction. We will go
Quadratic Functions The translation o a unction is simpl the shiting o a unction. In this section, or the most part, we will be graphing various unctions b means o shiting the parent unction. We will go
Review of Classical Optimization
 Part II Review of Classical Optimization Multidisciplinary Design Optimization of Aircrafts 51 2 Deterministic Methods 2.1 One-Dimensional Unconstrained Minimization 2.1.1 Motivation Most practical optimization
Part II Review of Classical Optimization Multidisciplinary Design Optimization of Aircrafts 51 2 Deterministic Methods 2.1 One-Dimensional Unconstrained Minimization 2.1.1 Motivation Most practical optimization
( x) f = where P and Q are polynomials.
 f = where P and Q are polynomials.") 9.8 Graphing Rational Functions Lets begin with a deinition. Deinition: Rational Function A rational unction is a unction o the orm ( ) ( ) ( ) P where P and Q are polynomials. Q An eample o a simple rational
9.8 Graphing Rational Functions Lets begin with a deinition. Deinition: Rational Function A rational unction is a unction o the orm ( ) ( ) ( ) P where P and Q are polynomials. Q An eample o a simple rational
Roberto s Notes on Differential Calculus Chapter 8: Graphical analysis Section 1. Extreme points
 Roberto s Notes on Dierential Calculus Chapter 8: Graphical analysis Section 1 Extreme points What you need to know already: How to solve basic algebraic and trigonometric equations. All basic techniques
Roberto s Notes on Dierential Calculus Chapter 8: Graphical analysis Section 1 Extreme points What you need to know already: How to solve basic algebraic and trigonometric equations. All basic techniques
Polynomials, Linear Factors, and Zeros. Factor theorem, multiple zero, multiplicity, relative maximum, relative minimum
 Polynomials, Linear Factors, and Zeros To analyze the actored orm o a polynomial. To write a polynomial unction rom its zeros. Describe the relationship among solutions, zeros, - intercept, and actors.
Polynomials, Linear Factors, and Zeros To analyze the actored orm o a polynomial. To write a polynomial unction rom its zeros. Describe the relationship among solutions, zeros, - intercept, and actors.
Numerical Methods. Root Finding
 Numerical Methods Solving Non Linear 1-Dimensional Equations Root Finding Given a real valued function f of one variable (say ), the idea is to find an such that: f() 0 1 Root Finding Eamples Find real
Numerical Methods Solving Non Linear 1-Dimensional Equations Root Finding Given a real valued function f of one variable (say ), the idea is to find an such that: f() 0 1 Root Finding Eamples Find real
Numerical Methods Lecture 3
 Numerical Methods Lecture 3 Nonlinear Equations by Pavel Ludvík Introduction Definition (Root or zero of a function) A root (or a zero) of a function f is a solution of an equation f (x) = 0. We learn
Numerical Methods Lecture 3 Nonlinear Equations by Pavel Ludvík Introduction Definition (Root or zero of a function) A root (or a zero) of a function f is a solution of an equation f (x) = 0. We learn
Conjugate gradient algorithm for training neural networks
 . Introduction Recall that in the steepest-descent neural network training algorithm, consecutive line-search directions are orthogonal, such that, where, gwt [ ( + ) ] denotes E[ w( t + ) ], the gradient
. Introduction Recall that in the steepest-descent neural network training algorithm, consecutive line-search directions are orthogonal, such that, where, gwt [ ( + ) ] denotes E[ w( t + ) ], the gradient
Unconstrained optimization
 Chapter 4 Unconstrained optimization An unconstrained optimization problem takes the form min x Rnf(x) (4.1) for a target functional (also called objective function) f : R n R. In this chapter and throughout
Chapter 4 Unconstrained optimization An unconstrained optimization problem takes the form min x Rnf(x) (4.1) for a target functional (also called objective function) f : R n R. In this chapter and throughout
11 More Regression; Newton s Method; ROC Curves
 More Regression; Newton s Method; ROC Curves 59 11 More Regression; Newton s Method; ROC Curves LEAST-SQUARES POLYNOMIAL REGRESSION Replace each X i with feature vector e.g. (X i ) = [X 2 i1 X i1 X i2
More Regression; Newton s Method; ROC Curves 59 11 More Regression; Newton s Method; ROC Curves LEAST-SQUARES POLYNOMIAL REGRESSION Replace each X i with feature vector e.g. (X i ) = [X 2 i1 X i1 X i2
1 Newton s Method. Suppose we want to solve: x R. At x = x, f (x) can be approximated by:
 can be approximated by:") Newton s Method Suppose we want to solve: (P:) min f (x) At x = x, f (x) can be approximated by: n x R. f (x) h(x) := f ( x)+ f ( x) T (x x)+ (x x) t H ( x)(x x), 2 which is the quadratic Taylor expansion
Newton s Method Suppose we want to solve: (P:) min f (x) At x = x, f (x) can be approximated by: n x R. f (x) h(x) := f ( x)+ f ( x) T (x x)+ (x x) t H ( x)(x x), 2 which is the quadratic Taylor expansion
Contents. Preface. 1 Introduction Optimization view on mathematical models NLP models, black-box versus explicit expression 3
 Contents Preface ix 1 Introduction 1 1.1 Optimization view on mathematical models 1 1.2 NLP models, black-box versus explicit expression 3 2 Mathematical modeling, cases 7 2.1 Introduction 7 2.2 Enclosing
Contents Preface ix 1 Introduction 1 1.1 Optimization view on mathematical models 1 1.2 NLP models, black-box versus explicit expression 3 2 Mathematical modeling, cases 7 2.1 Introduction 7 2.2 Enclosing
Line Search Methods for Unconstrained Optimisation
 Line Search Methods for Unconstrained Optimisation Lecture 8, Numerical Linear Algebra and Optimisation Oxford University Computing Laboratory, MT 2007 Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The Generic
Line Search Methods for Unconstrained Optimisation Lecture 8, Numerical Linear Algebra and Optimisation Oxford University Computing Laboratory, MT 2007 Dr Raphael Hauser (hauser@comlab.ox.ac.uk) The Generic
Topic 8c Multi Variable Optimization
 Course Instructor Dr. Raymond C. Rumpf Office: A 337 Phone: (915) 747 6958 E Mail: rcrumpf@utep.edu Topic 8c Multi Variable Optimization EE 4386/5301 Computational Methods in EE Outline Mathematical Preliminaries
Course Instructor Dr. Raymond C. Rumpf Office: A 337 Phone: (915) 747 6958 E Mail: rcrumpf@utep.edu Topic 8c Multi Variable Optimization EE 4386/5301 Computational Methods in EE Outline Mathematical Preliminaries
UNCONSTRAINED OPTIMIZATION
 UNCONSTRAINED OPTIMIZATION 6. MATHEMATICAL BASIS Given a function f : R n R, and x R n such that f(x ) < f(x) for all x R n then x is called a minimizer of f and f(x ) is the minimum(value) of f. We wish
UNCONSTRAINED OPTIMIZATION 6. MATHEMATICAL BASIS Given a function f : R n R, and x R n such that f(x ) < f(x) for all x R n then x is called a minimizer of f and f(x ) is the minimum(value) of f. We wish
4.1 & 4.2 Student Notes Using the First and Second Derivatives. for all x in D, where D is the domain of f. The number f()
") 4.1 & 4. Student Notes Using the First and Second Derivatives Deinition A unction has an absolute maimum (or global maimum) at c i ( c) ( ) or all in D, where D is the domain o. The number () c is called
4.1 & 4. Student Notes Using the First and Second Derivatives Deinition A unction has an absolute maimum (or global maimum) at c i ( c) ( ) or all in D, where D is the domain o. The number () c is called
Roots of equations, minimization, numerical integration
 Roots of equations, minimization, numerical integration Alexander Khanov PHYS6260: Experimental Methods is HEP Oklahoma State University November 1, 2017 Roots of equations Find the roots solve equation
Roots of equations, minimization, numerical integration Alexander Khanov PHYS6260: Experimental Methods is HEP Oklahoma State University November 1, 2017 Roots of equations Find the roots solve equation
Optimal Control of process
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA METALURGIE A MATERIÁLOVÉHO INŽENÝRSTVÍ Optimal Control o process Study Support Milan Heger Ostrava 8 Title: Optimal Control o process Code: Author:
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA METALURGIE A MATERIÁLOVÉHO INŽENÝRSTVÍ Optimal Control o process Study Support Milan Heger Ostrava 8 Title: Optimal Control o process Code: Author:
17 Solution of Nonlinear Systems
 17 Solution of Nonlinear Systems We now discuss the solution of systems of nonlinear equations. An important ingredient will be the multivariate Taylor theorem. Theorem 17.1 Let D = {x 1, x 2,..., x m
17 Solution of Nonlinear Systems We now discuss the solution of systems of nonlinear equations. An important ingredient will be the multivariate Taylor theorem. Theorem 17.1 Let D = {x 1, x 2,..., x m
Nonlinear Programming
 Nonlinear Programming Kees Roos e-mail: C.Roos@ewi.tudelft.nl URL: http://www.isa.ewi.tudelft.nl/ roos LNMB Course De Uithof, Utrecht February 6 - May 8, A.D. 2006 Optimization Group 1 Outline for week
Nonlinear Programming Kees Roos e-mail: C.Roos@ewi.tudelft.nl URL: http://www.isa.ewi.tudelft.nl/ roos LNMB Course De Uithof, Utrecht February 6 - May 8, A.D. 2006 Optimization Group 1 Outline for week
Inverse of a Function
 . Inverse o a Function Essential Question How can ou sketch the graph o the inverse o a unction? Graphing Functions and Their Inverses CONSTRUCTING VIABLE ARGUMENTS To be proicient in math, ou need to
. Inverse o a Function Essential Question How can ou sketch the graph o the inverse o a unction? Graphing Functions and Their Inverses CONSTRUCTING VIABLE ARGUMENTS To be proicient in math, ou need to
CS 450 Numerical Analysis. Chapter 5: Nonlinear Equations
 Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Lecture slides based on the textbook Scientific Computing: An Introductory Survey by Michael T. Heath, copyright c 2018 by the Society for Industrial and Applied Mathematics. http://www.siam.org/books/cl80
Optimization. Next: Curve Fitting Up: Numerical Analysis for Chemical Previous: Linear Algebraic and Equations. Subsections
 Next: Curve Fitting Up: Numerical Analysis for Chemical Previous: Linear Algebraic and Equations Subsections One-dimensional Unconstrained Optimization Golden-Section Search Quadratic Interpolation Newton's
Next: Curve Fitting Up: Numerical Analysis for Chemical Previous: Linear Algebraic and Equations Subsections One-dimensional Unconstrained Optimization Golden-Section Search Quadratic Interpolation Newton's
Bindel, Fall 2011 Intro to Scientific Computing (CS 3220) Week 6: Monday, Mar 7. e k+1 = 1 f (ξ k ) 2 f (x k ) e2 k.
 Week 6: Monday, Mar 7. e k+1 = 1 f (ξ k ) 2 f (x k ) e2 k.") Problem du jour Week 6: Monday, Mar 7 Show that for any initial guess x 0 > 0, Newton iteration on f(x) = x 2 a produces a decreasing sequence x 1 x 2... x n a. What is the rate of convergence if a = 0?
Problem du jour Week 6: Monday, Mar 7 Show that for any initial guess x 0 > 0, Newton iteration on f(x) = x 2 a produces a decreasing sequence x 1 x 2... x n a. What is the rate of convergence if a = 0?
Programming, numerics and optimization
 Programming, numerics and optimization Lecture C-3: Unconstrained optimization II Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428
Programming, numerics and optimization Lecture C-3: Unconstrained optimization II Łukasz Jankowski ljank@ippt.pan.pl Institute of Fundamental Technological Research Room 4.32, Phone +22.8261281 ext. 428
3. Several Random Variables
 . Several Random Variables. Two Random Variables. Conditional Probabilit--Revisited. Statistical Independence.4 Correlation between Random Variables. Densit unction o the Sum o Two Random Variables. Probabilit
. Several Random Variables. Two Random Variables. Conditional Probabilit--Revisited. Statistical Independence.4 Correlation between Random Variables. Densit unction o the Sum o Two Random Variables. Probabilit
and ( x, y) in a domain D R a unique real number denoted x y and b) = x y = {(, ) + 36} that is all points inside and on
 in a domain D R a unique real number denoted x y and b) = x y = {(, ) + 36} that is all points inside and on") Mat 7 Calculus III Updated on 10/4/07 Dr. Firoz Chapter 14 Partial Derivatives Section 14.1 Functions o Several Variables Deinition: A unction o two variables is a rule that assigns to each ordered pair
Mat 7 Calculus III Updated on 10/4/07 Dr. Firoz Chapter 14 Partial Derivatives Section 14.1 Functions o Several Variables Deinition: A unction o two variables is a rule that assigns to each ordered pair
Numerical Optimization of Partial Differential Equations
 Numerical Optimization of Partial Differential Equations Part I: basic optimization concepts in R n Bartosz Protas Department of Mathematics & Statistics McMaster University, Hamilton, Ontario, Canada
Numerical Optimization of Partial Differential Equations Part I: basic optimization concepts in R n Bartosz Protas Department of Mathematics & Statistics McMaster University, Hamilton, Ontario, Canada
Lecture Notes to Accompany. Scientific Computing An Introductory Survey. by Michael T. Heath. Chapter 5. Nonlinear Equations
 Lecture Notes to Accompany Scientific Computing An Introductory Survey Second Edition by Michael T Heath Chapter 5 Nonlinear Equations Copyright c 2001 Reproduction permitted only for noncommercial, educational
Lecture Notes to Accompany Scientific Computing An Introductory Survey Second Edition by Michael T Heath Chapter 5 Nonlinear Equations Copyright c 2001 Reproduction permitted only for noncommercial, educational
Static unconstrained optimization
 Static unconstrained optimization 2 In unconstrained optimization an objective function is minimized without any additional restriction on the decision variables, i.e. min f(x) x X ad (2.) with X ad R
Static unconstrained optimization 2 In unconstrained optimization an objective function is minimized without any additional restriction on the decision variables, i.e. min f(x) x X ad (2.) with X ad R
Unconstrained Optimization
 1 / 36 Unconstrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University February 2, 2015 2 / 36 3 / 36 4 / 36 5 / 36 1. preliminaries 1.1 local approximation
1 / 36 Unconstrained Optimization ME598/494 Lecture Max Yi Ren Department of Mechanical Engineering, Arizona State University February 2, 2015 2 / 36 3 / 36 4 / 36 5 / 36 1. preliminaries 1.1 local approximation
ROBUST STABILITY AND PERFORMANCE ANALYSIS OF UNSTABLE PROCESS WITH DEAD TIME USING Mu SYNTHESIS
 ROBUST STABILITY AND PERFORMANCE ANALYSIS OF UNSTABLE PROCESS WITH DEAD TIME USING Mu SYNTHESIS I. Thirunavukkarasu 1, V. I. George 1, G. Saravana Kumar 1 and A. Ramakalyan 2 1 Department o Instrumentation
ROBUST STABILITY AND PERFORMANCE ANALYSIS OF UNSTABLE PROCESS WITH DEAD TIME USING Mu SYNTHESIS I. Thirunavukkarasu 1, V. I. George 1, G. Saravana Kumar 1 and A. Ramakalyan 2 1 Department o Instrumentation
Nonlinearity Root-finding Bisection Fixed Point Iteration Newton s Method Secant Method Conclusion. Nonlinear Systems
 Nonlinear Systems CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Nonlinear Systems 1 / 24 Part III: Nonlinear Problems Not all numerical problems
Nonlinear Systems CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Justin Solomon CS 205A: Mathematical Methods Nonlinear Systems 1 / 24 Part III: Nonlinear Problems Not all numerical problems
3.1 Introduction. Solve non-linear real equation f(x) = 0 for real root or zero x. E.g. x x 1.5 =0, tan x x =0.
 = 0 for real root or zero x. E.g. x x 1.5 =0, tan x x =0.") 3.1 Introduction Solve non-linear real equation f(x) = 0 for real root or zero x. E.g. x 3 +1.5x 1.5 =0, tan x x =0. Practical existence test for roots: by intermediate value theorem, f C[a, b] & f(a)f(b)
3.1 Introduction Solve non-linear real equation f(x) = 0 for real root or zero x. E.g. x 3 +1.5x 1.5 =0, tan x x =0. Practical existence test for roots: by intermediate value theorem, f C[a, b] & f(a)f(b)
Outline. Scientific Computing: An Introductory Survey. Nonlinear Equations. Nonlinear Equations. Examples: Nonlinear Equations
 Methods for Systems of Methods for Systems of Outline Scientific Computing: An Introductory Survey Chapter 5 1 Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign
Methods for Systems of Methods for Systems of Outline Scientific Computing: An Introductory Survey Chapter 5 1 Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign
Part I: Thin Converging Lens
 Laboratory 1 PHY431 Fall 011 Part I: Thin Converging Lens This eperiment is a classic eercise in geometric optics. The goal is to measure the radius o curvature and ocal length o a single converging lens
Laboratory 1 PHY431 Fall 011 Part I: Thin Converging Lens This eperiment is a classic eercise in geometric optics. The goal is to measure the radius o curvature and ocal length o a single converging lens
Quasi-Newton Methods
 Newton s Method Pros and Cons Quasi-Newton Methods MA 348 Kurt Bryan Newton s method has some very nice properties: It s extremely fast, at least once it gets near the minimum, and with the simple modifications
Newton s Method Pros and Cons Quasi-Newton Methods MA 348 Kurt Bryan Newton s method has some very nice properties: It s extremely fast, at least once it gets near the minimum, and with the simple modifications
Introduction to Geometry Optimization. Computational Chemistry lab 2009
 Introduction to Geometry Optimization Computational Chemistry lab 9 Determination of the molecule configuration H H Diatomic molecule determine the interatomic distance H O H Triatomic molecule determine
Introduction to Geometry Optimization Computational Chemistry lab 9 Determination of the molecule configuration H H Diatomic molecule determine the interatomic distance H O H Triatomic molecule determine
Consider the function f(x, y). Recall that we can approximate f(x, y) with a linear function in x and y:
. Recall that we can approximate f(x, y) with a linear function in x and y:") Taylor s Formula Consider the unction (x, y). Recall that we can approximate (x, y) with a linear unction in x and y: (x, y) (a, b)+ x (a, b)(x a)+ y (a, b)(y b) Notice that again this is just a linear
Taylor s Formula Consider the unction (x, y). Recall that we can approximate (x, y) with a linear unction in x and y: (x, y) (a, b)+ x (a, b)(x a)+ y (a, b)(y b) Notice that again this is just a linear