6.447 rad/sec and ln (% OS /100) tan Thus pc. the testing point is s 3.33 j5.519
|
|
|
- Magdalene Strickland
- 6 years ago
- Views:
Transcription

1 9. a. 3.33, n T ln(% OS /100) 2 2 ln (% OS /100) Thu n 6.7 rad/ec and the teting point i 3.33 j b. Summation of angle including the compenating zero i , The compenator pole mut contribute = c. Uing the geometry hown below p c tan Thu pc.985 d. Adding the compenator pole tet for j5.519 which give K=187. e. Searching the real axi egment for K=187 we find higher order pole at and f. The pole at i far away to the left. The pole at may not cancel the zero at -1. Quetionable econd order approximation the ytem hould be imulated. g.
2 A imulation of the ytem how a percent overhoot of 56.8% and a ettling time of 2.31 ec. Thi the pecification were not met becaue pole-zero cancellation wa not achieved. A redeign i required. 10. %OS -ln ( ) a. n = T = 2.; = 100 = 0.5. Thu, n =.799 rad/ and the operating %OS π 2 ln 2 ( ) 100 point i -2. ± j.16. b. Summation of angle including the compenating zero i o. Therefore, the compenator pole mut contribute 180 o o = -8.6 o. Uing the geometry hown below, tan 8.6 o. Thu, p c = pc - 2. = c. Adding the compenator pole and uing j.16 a the tet point, K = d. Searching the real axi egment for K = , we find a higher-order pole at e. Pole at i near the zero at -1. Simulate to enure accuracy of reult. f. K a = g. =.8 From the plot, T = 1. econd; T p = 0.68 econd; %OS = 35%.
 = 3. Uing the uncompenated ytem' pole and zero along with the compenator zero at -.5, the ummation of angle to the deign point, - + j3 i 137.55 o.")
3 11. a. b. and c. Searching along the = 0.8 line (13.13 o ), find the operating point at j2.38 with K =5.9. d. Since n = T, the real part of the compenated dominant pole i -. The imaginary part i tan (180 o o ) = 3. Uing the uncompenated ytem' pole and zero along with the compenator zero at -.5, the ummation of angle to the deign point, - + j3 i o. Thu, the contribution of the compenator pole mut be o = Uing the following geometry, 3 = tan 2.5 0, or pc = p c

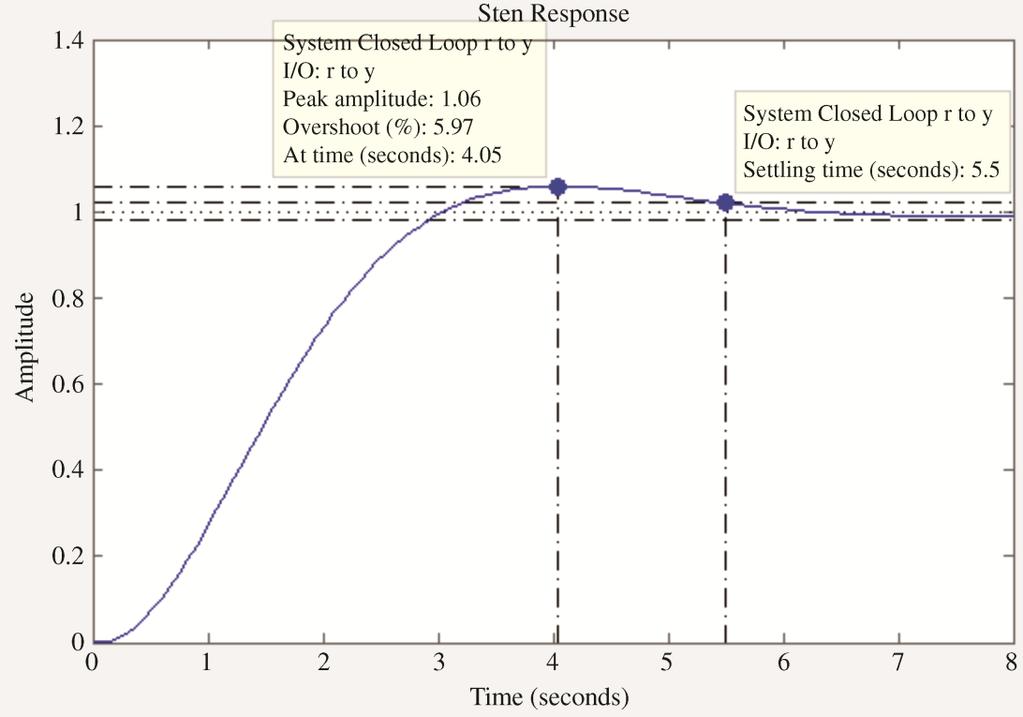
4 Adding the compenator pole and uing + j3 a the tet point, K = e. Compenated: Searching the real axi egment for K = 105.6, we find higher-order pole at 12.32, and approximately at.71 ± Since there i no pole/zero cancellation with the zero at -6 and.5, the ytem hould be imulated to check the ettling time. f. The graph how about 2% overhoot and a 1.1 econd ettling time compared to a deired 1.52% overhoot and a ettling time of 1 econd.
5 1. Uncompenated: Search along the 0.6 line and find the operating point j1.23with K A damping factor of 0.6 correpond to a %OS=9.8%. T.36 ec K There i a higher order pole at p 0.7 Compenated: The PI controller i choen a Gc () Search along the 0.6 line and find the operating point j0.81 with K T 6.27 ec. K p The two higher order pole are at -0.6 and The ytem mut be imulated to verify performance:
6
7 a. Inert a cacade compenator, uch a Gc( ). b. Program: K=1 G1=zpk([],[0,-3,-6],K) %G1=1/(+3)(+6) Gc=zpk([-0.01],[0],1) %Gc=(+0.01)/ G=G1*Gc rlocu(g) T=feedback(G,1) T1=tf(1,[1,0]) %Form 1/ to integrate tep input T2=T*T1 t=0:0.1:200; tep(t1,t2,t) %Show input ramp and ramp repone Computer repone: K = (+3) (+6) (+0.01) (+0.01) ^2 (+3) (+6) (+0.01) (+6.05) (+2.889) (+0.038) ( ) Tranfer function: 1 -
8 (+0.01) (+6.05) (+2.889) (+0.038) ( )
ECE-320 Linear Control Systems. Spring 2014, Exam 1. No calculators or computers allowed, you may leave your answers as fractions.
 ECE-0 Linear Control Sytem Spring 04, Exam No calculator or computer allowed, you may leave your anwer a fraction. All problem are worth point unle noted otherwie. Total /00 Problem - refer to the unit
ECE-0 Linear Control Sytem Spring 04, Exam No calculator or computer allowed, you may leave your anwer a fraction. All problem are worth point unle noted otherwie. Total /00 Problem - refer to the unit
Lecture 4. Chapter 11 Nise. Controller Design via Frequency Response. G. Hovland 2004
 METR4200 Advanced Control Lecture 4 Chapter Nie Controller Deign via Frequency Repone G. Hovland 2004 Deign Goal Tranient repone via imple gain adjutment Cacade compenator to improve teady-tate error Cacade
METR4200 Advanced Control Lecture 4 Chapter Nie Controller Deign via Frequency Repone G. Hovland 2004 Deign Goal Tranient repone via imple gain adjutment Cacade compenator to improve teady-tate error Cacade
Homework 12 Solution - AME30315, Spring 2013
 Homework 2 Solution - AME335, Spring 23 Problem :[2 pt] The Aerotech AGS 5 i a linear motor driven XY poitioning ytem (ee attached product heet). A friend of mine, through careful experimentation, identified
Homework 2 Solution - AME335, Spring 23 Problem :[2 pt] The Aerotech AGS 5 i a linear motor driven XY poitioning ytem (ee attached product heet). A friend of mine, through careful experimentation, identified
ECE 3510 Root Locus Design Examples. PI To eliminate steady-state error (for constant inputs) & perfect rejection of constant disturbances
 & perfect rejection of constant disturbances") ECE 350 Root Locu Deign Example Recall the imple crude ervo from lab G( ) 0 6.64 53.78 σ = = 3 23.473 PI To eliminate teady-tate error (for contant input) & perfect reection of contant diturbance Note:
ECE 350 Root Locu Deign Example Recall the imple crude ervo from lab G( ) 0 6.64 53.78 σ = = 3 23.473 PI To eliminate teady-tate error (for contant input) & perfect reection of contant diturbance Note:
Root Locus Contents. Root locus, sketching algorithm. Root locus, examples. Root locus, proofs. Root locus, control examples
 Root Locu Content Root locu, ketching algorithm Root locu, example Root locu, proof Root locu, control example Root locu, influence of zero and pole Root locu, lead lag controller deign 9 Spring ME45 -
Root Locu Content Root locu, ketching algorithm Root locu, example Root locu, proof Root locu, control example Root locu, influence of zero and pole Root locu, lead lag controller deign 9 Spring ME45 -
376 CHAPTER 6. THE FREQUENCY-RESPONSE DESIGN METHOD. D(s) = we get the compensated system with :
 = we get the compensated system with :") 376 CHAPTER 6. THE FREQUENCY-RESPONSE DESIGN METHOD Therefore by applying the lead compenator with ome gain adjutment : D() =.12 4.5 +1 9 +1 we get the compenated ytem with : PM =65, ω c = 22 rad/ec, o
376 CHAPTER 6. THE FREQUENCY-RESPONSE DESIGN METHOD Therefore by applying the lead compenator with ome gain adjutment : D() =.12 4.5 +1 9 +1 we get the compenated ytem with : PM =65, ω c = 22 rad/ec, o
MODERN CONTROL SYSTEMS
 MODERN CONTROL SYSTEMS Lecture 1 Root Locu Emam Fathy Department of Electrical and Control Engineering email: emfmz@aat.edu http://www.aat.edu/cv.php?dip_unit=346&er=68525 1 Introduction What i root locu?
MODERN CONTROL SYSTEMS Lecture 1 Root Locu Emam Fathy Department of Electrical and Control Engineering email: emfmz@aat.edu http://www.aat.edu/cv.php?dip_unit=346&er=68525 1 Introduction What i root locu?
ME 375 FINAL EXAM SOLUTIONS Friday December 17, 2004
 ME 375 FINAL EXAM SOLUTIONS Friday December 7, 004 Diviion Adam 0:30 / Yao :30 (circle one) Name Intruction () Thi i a cloed book eamination, but you are allowed three 8.5 crib heet. () You have two hour
ME 375 FINAL EXAM SOLUTIONS Friday December 7, 004 Diviion Adam 0:30 / Yao :30 (circle one) Name Intruction () Thi i a cloed book eamination, but you are allowed three 8.5 crib heet. () You have two hour
EE 4443/5329. LAB 3: Control of Industrial Systems. Simulation and Hardware Control (PID Design) The Inverted Pendulum. (ECP Systems-Model: 505)
 The Inverted Pendulum. (ECP Systems-Model: 505)") EE 4443/5329 LAB 3: Control of Indutrial Sytem Simulation and Hardware Control (PID Deign) The Inverted Pendulum (ECP Sytem-Model: 505) Compiled by: Nitin Swamy Email: nwamy@lakehore.uta.edu Email: okuljaca@lakehore.uta.edu
EE 4443/5329 LAB 3: Control of Indutrial Sytem Simulation and Hardware Control (PID Deign) The Inverted Pendulum (ECP Sytem-Model: 505) Compiled by: Nitin Swamy Email: nwamy@lakehore.uta.edu Email: okuljaca@lakehore.uta.edu
CHAPTER 4 DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL
 98 CHAPTER DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL INTRODUCTION The deign of ytem uing tate pace model for the deign i called a modern control deign and it i
98 CHAPTER DESIGN OF STATE FEEDBACK CONTROLLERS AND STATE OBSERVERS USING REDUCED ORDER MODEL INTRODUCTION The deign of ytem uing tate pace model for the deign i called a modern control deign and it i
Chapter 7. Root Locus Analysis
 Chapter 7 Root Locu Analyi jw + KGH ( ) GH ( ) - K 0 z O 4 p 2 p 3 p Root Locu Analyi The root of the cloed-loop characteritic equation define the ytem characteritic repone. Their location in the complex
Chapter 7 Root Locu Analyi jw + KGH ( ) GH ( ) - K 0 z O 4 p 2 p 3 p Root Locu Analyi The root of the cloed-loop characteritic equation define the ytem characteritic repone. Their location in the complex
SKEE 3143 CONTROL SYSTEM DESIGN. CHAPTER 3 Compensator Design Using the Bode Plot
 SKEE 3143 CONTROL SYSTEM DESIGN CHAPTER 3 Compenator Deign Uing the Bode Plot 1 Chapter Outline 3.1 Introduc4on Re- viit to Frequency Repone, ploang frequency repone, bode plot tability analyi. 3.2 Gain
SKEE 3143 CONTROL SYSTEM DESIGN CHAPTER 3 Compenator Deign Uing the Bode Plot 1 Chapter Outline 3.1 Introduc4on Re- viit to Frequency Repone, ploang frequency repone, bode plot tability analyi. 3.2 Gain
Lag-Lead Compensator Design
 Lag-Lead Compenator Deign ELEC 3 Spring 08 Lag or Lead Struture A bai ompenator onit of a gain, one real pole and one real zero Two type: phae-lead and phae-lag Phae-lead: provide poitive phae hift and
Lag-Lead Compenator Deign ELEC 3 Spring 08 Lag or Lead Struture A bai ompenator onit of a gain, one real pole and one real zero Two type: phae-lead and phae-lag Phae-lead: provide poitive phae hift and
ME 375 FINAL EXAM Wednesday, May 6, 2009
 ME 375 FINAL EXAM Wedneday, May 6, 9 Diviion Meckl :3 / Adam :3 (circle one) Name_ Intruction () Thi i a cloed book examination, but you are allowed three ingle-ided 8.5 crib heet. A calculator i NOT allowed.
ME 375 FINAL EXAM Wedneday, May 6, 9 Diviion Meckl :3 / Adam :3 (circle one) Name_ Intruction () Thi i a cloed book examination, but you are allowed three ingle-ided 8.5 crib heet. A calculator i NOT allowed.
CISE302: Linear Control Systems
 Term 8 CISE: Linear Control Sytem Dr. Samir Al-Amer Chapter 7: Root locu CISE_ch 7 Al-Amer8 ١ Learning Objective Undertand the concept of root locu and it role in control ytem deign Be able to ketch root
Term 8 CISE: Linear Control Sytem Dr. Samir Al-Amer Chapter 7: Root locu CISE_ch 7 Al-Amer8 ١ Learning Objective Undertand the concept of root locu and it role in control ytem deign Be able to ketch root
Digital Control System
 Digital Control Sytem - A D D A Micro ADC DAC Proceor Correction Element Proce Clock Meaurement A: Analog D: Digital Continuou Controller and Digital Control Rt - c Plant yt Continuou Controller Digital
Digital Control Sytem - A D D A Micro ADC DAC Proceor Correction Element Proce Clock Meaurement A: Analog D: Digital Continuou Controller and Digital Control Rt - c Plant yt Continuou Controller Digital
Control Systems Engineering ( Chapter 7. Steady-State Errors ) Prof. Kwang-Chun Ho Tel: Fax:
 Prof. Kwang-Chun Ho Tel: Fax:") Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
Control Sytem Engineering ( Chapter 7. Steady-State Error Prof. Kwang-Chun Ho kwangho@hanung.ac.kr Tel: 0-760-453 Fax:0-760-4435 Introduction In thi leon, you will learn the following : How to find the
G(s) = 1 s by hand for! = 1, 2, 5, 10, 20, 50, and 100 rad/sec.
 = 1 s by hand for! = 1, 2, 5, 10, 20, 50, and 100 rad/sec.") 6003 where A = jg(j!)j ; = tan Im [G(j!)] Re [G(j!)] = \G(j!) 2. (a) Calculate the magnitude and phae of G() = + 0 by hand for! =, 2, 5, 0, 20, 50, and 00 rad/ec. (b) ketch the aymptote for G() according
6003 where A = jg(j!)j ; = tan Im [G(j!)] Re [G(j!)] = \G(j!) 2. (a) Calculate the magnitude and phae of G() = + 0 by hand for! =, 2, 5, 0, 20, 50, and 00 rad/ec. (b) ketch the aymptote for G() according
Follow The Leader Architecture
 ECE 6(ESS) Follow The Leader Architecture 6 th Order Elliptic andpa Filter A numerical example Objective To deign a 6th order bandpa elliptic filter uing the Follow-the-Leader (FLF) architecture. The pecification
ECE 6(ESS) Follow The Leader Architecture 6 th Order Elliptic andpa Filter A numerical example Objective To deign a 6th order bandpa elliptic filter uing the Follow-the-Leader (FLF) architecture. The pecification
NAME (pinyin/italian)... MATRICULATION NUMBER... SIGNATURE
... MATRICULATION NUMBER... SIGNATURE") POLITONG SHANGHAI BASIC AUTOMATIC CONTROL June Academic Year / Exam grade NAME (pinyin/italian)... MATRICULATION NUMBER... SIGNATURE Ue only thee page (including the bac) for anwer. Do not ue additional
POLITONG SHANGHAI BASIC AUTOMATIC CONTROL June Academic Year / Exam grade NAME (pinyin/italian)... MATRICULATION NUMBER... SIGNATURE Ue only thee page (including the bac) for anwer. Do not ue additional
Gain and Phase Margins Based Delay Dependent Stability Analysis of Two- Area LFC System with Communication Delays
 Gain and Phae Margin Baed Delay Dependent Stability Analyi of Two- Area LFC Sytem with Communication Delay Şahin Sönmez and Saffet Ayaun Department of Electrical Engineering, Niğde Ömer Halidemir Univerity,
Gain and Phae Margin Baed Delay Dependent Stability Analyi of Two- Area LFC Sytem with Communication Delay Şahin Sönmez and Saffet Ayaun Department of Electrical Engineering, Niğde Ömer Halidemir Univerity,
ME2142/ME2142E Feedback Control Systems
 Root Locu Analyi Root Locu Analyi Conider the cloed-loop ytem R + E - G C B H The tranient repone, and tability, of the cloed-loop ytem i determined by the value of the root of the characteritic equation
Root Locu Analyi Root Locu Analyi Conider the cloed-loop ytem R + E - G C B H The tranient repone, and tability, of the cloed-loop ytem i determined by the value of the root of the characteritic equation
Lecture 8. PID control. Industrial process control ( today) PID control. Insights about PID actions
 PID control. Insights about PID actions") Lecture 8. PID control. The role of P, I, and D action 2. PID tuning Indutrial proce control (92... today) Feedback control i ued to improve the proce performance: tatic performance: for contant reference,
Lecture 8. PID control. The role of P, I, and D action 2. PID tuning Indutrial proce control (92... today) Feedback control i ued to improve the proce performance: tatic performance: for contant reference,
Reduction of Multiple Subsystems
 F I V E Reduction of Multiple Subytem SOLUTIONS TO CASE STUDIES CHALLENGES Antenna Control: Deigning a Cloed-Loop Repone a. Drawing the block diagram of the ytem: u i + - Pot 0 Π Pre amp K Power amp 50
F I V E Reduction of Multiple Subytem SOLUTIONS TO CASE STUDIES CHALLENGES Antenna Control: Deigning a Cloed-Loop Repone a. Drawing the block diagram of the ytem: u i + - Pot 0 Π Pre amp K Power amp 50
Control Systems Analysis and Design by the Root-Locus Method
 6 Control Sytem Analyi and Deign by the Root-Locu Method 6 1 INTRODUCTION The baic characteritic of the tranient repone of a cloed-loop ytem i cloely related to the location of the cloed-loop pole. If
6 Control Sytem Analyi and Deign by the Root-Locu Method 6 1 INTRODUCTION The baic characteritic of the tranient repone of a cloed-loop ytem i cloely related to the location of the cloed-loop pole. If
Lecture 10 Filtering: Applied Concepts
 Lecture Filtering: Applied Concept In the previou two lecture, you have learned about finite-impule-repone (FIR) and infinite-impule-repone (IIR) filter. In thee lecture, we introduced the concept of filtering
Lecture Filtering: Applied Concept In the previou two lecture, you have learned about finite-impule-repone (FIR) and infinite-impule-repone (IIR) filter. In thee lecture, we introduced the concept of filtering
HOMEWORK ASSIGNMENT #2
 Texa A&M Univerity Electrical Engineering Department ELEN Integrated Active Filter Deign Methodologie Alberto Valde-Garcia TAMU ID# 000 17 September 0, 001 HOMEWORK ASSIGNMENT # PROBLEM 1 Obtain at leat
Texa A&M Univerity Electrical Engineering Department ELEN Integrated Active Filter Deign Methodologie Alberto Valde-Garcia TAMU ID# 000 17 September 0, 001 HOMEWORK ASSIGNMENT # PROBLEM 1 Obtain at leat
Function and Impulse Response
 Tranfer Function and Impule Repone Solution of Selected Unolved Example. Tranfer Function Q.8 Solution : The -domain network i hown in the Fig... Applying VL to the two loop, R R R I () I () L I () L V()
Tranfer Function and Impule Repone Solution of Selected Unolved Example. Tranfer Function Q.8 Solution : The -domain network i hown in the Fig... Applying VL to the two loop, R R R I () I () L I () L V()
into a discrete time function. Recall that the table of Laplace/z-transforms is constructed by (i) selecting to get
 selecting to get") Lecture 25 Introduction to Some Matlab c2d Code in Relation to Sampled Sytem here are many way to convert a continuou time function, { h( t) ; t [0, )} into a dicrete time function { h ( k) ; k {0,,, }}
Lecture 25 Introduction to Some Matlab c2d Code in Relation to Sampled Sytem here are many way to convert a continuou time function, { h( t) ; t [0, )} into a dicrete time function { h ( k) ; k {0,,, }}
HIGHER-ORDER FILTERS. Cascade of Biquad Filters. Follow the Leader Feedback Filters (FLF) ELEN 622 (ESS)
 ELEN 622 (ESS)") HIGHER-ORDER FILTERS Cacade of Biquad Filter Follow the Leader Feedbac Filter (FLF) ELEN 6 (ESS) Than for ome of the material to David Hernandez Garduño CASCADE FILTER DESIGN N H ( ) Π H ( ) H ( ) H (
HIGHER-ORDER FILTERS Cacade of Biquad Filter Follow the Leader Feedbac Filter (FLF) ELEN 6 (ESS) Than for ome of the material to David Hernandez Garduño CASCADE FILTER DESIGN N H ( ) Π H ( ) H ( ) H (
Evolutionary Algorithms Based Fixed Order Robust Controller Design and Robustness Performance Analysis
 Proceeding of 01 4th International Conference on Machine Learning and Computing IPCSIT vol. 5 (01) (01) IACSIT Pre, Singapore Evolutionary Algorithm Baed Fixed Order Robut Controller Deign and Robutne
Proceeding of 01 4th International Conference on Machine Learning and Computing IPCSIT vol. 5 (01) (01) IACSIT Pre, Singapore Evolutionary Algorithm Baed Fixed Order Robut Controller Deign and Robutne
Design By Emulation (Indirect Method)
") Deign By Emulation (Indirect Method he baic trategy here i, that Given a continuou tranfer function, it i required to find the bet dicrete equivalent uch that the ignal produced by paing an input ignal
Deign By Emulation (Indirect Method he baic trategy here i, that Given a continuou tranfer function, it i required to find the bet dicrete equivalent uch that the ignal produced by paing an input ignal
Chapter 9: Controller design. Controller design. Controller design
 Chapter 9. Controller Deign 9.. Introduction 9.2. Eect o negative eedback on the network traner unction 9.2.. Feedback reduce the traner unction rom diturbance to the output 9.2.2. Feedback caue the traner
Chapter 9. Controller Deign 9.. Introduction 9.2. Eect o negative eedback on the network traner unction 9.2.. Feedback reduce the traner unction rom diturbance to the output 9.2.2. Feedback caue the traner
Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubaneswar Kolkata Patna Web: Ph:
 Serial :. PT_EE_A+C_Control Sytem_798 Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubanewar olkata Patna Web: E-mail: info@madeeay.in Ph: -4546 CLASS TEST 8-9 ELECTRICAL ENGINEERING Subject
Serial :. PT_EE_A+C_Control Sytem_798 Delhi Noida Bhopal Hyderabad Jaipur Lucknow Indore Pune Bhubanewar olkata Patna Web: E-mail: info@madeeay.in Ph: -4546 CLASS TEST 8-9 ELECTRICAL ENGINEERING Subject
Given the following circuit with unknown initial capacitor voltage v(0): X(s) Immediately, we know that the transfer function H(s) is
: X(s) Immediately, we know that the transfer function H(s) is") EE 4G Note: Chapter 6 Intructor: Cheung More about ZSR and ZIR. Finding unknown initial condition: Given the following circuit with unknown initial capacitor voltage v0: F v0/ / Input xt 0Ω Output yt -
EE 4G Note: Chapter 6 Intructor: Cheung More about ZSR and ZIR. Finding unknown initial condition: Given the following circuit with unknown initial capacitor voltage v0: F v0/ / Input xt 0Ω Output yt -
The state variable description of an LTI system is given by 3 1O. Statement for Linked Answer Questions 3 and 4 :
 CHAPTER 6 CONTROL SYSTEMS YEAR TO MARKS MCQ 6. The tate variable decription of an LTI ytem i given by Jxo N J a NJx N JN K O K OK O K O xo a x + u Kxo O K 3 a3 OKx O K 3 O L P L J PL P L P x N K O y _
CHAPTER 6 CONTROL SYSTEMS YEAR TO MARKS MCQ 6. The tate variable decription of an LTI ytem i given by Jxo N J a NJx N JN K O K OK O K O xo a x + u Kxo O K 3 a3 OKx O K 3 O L P L J PL P L P x N K O y _
Department of Mechanical Engineering Massachusetts Institute of Technology Modeling, Dynamics and Control III Spring 2002
 Department of Mechanical Engineering Maachuett Intitute of Technology 2.010 Modeling, Dynamic and Control III Spring 2002 SOLUTIONS: Problem Set # 10 Problem 1 Etimating tranfer function from Bode Plot.
Department of Mechanical Engineering Maachuett Intitute of Technology 2.010 Modeling, Dynamic and Control III Spring 2002 SOLUTIONS: Problem Set # 10 Problem 1 Etimating tranfer function from Bode Plot.
Module 4: Time Response of discrete time systems Lecture Note 1
 Digital Control Module 4 Lecture Module 4: ime Repone of dicrete time ytem Lecture Note ime Repone of dicrete time ytem Abolute tability i a baic requirement of all control ytem. Apart from that, good
Digital Control Module 4 Lecture Module 4: ime Repone of dicrete time ytem Lecture Note ime Repone of dicrete time ytem Abolute tability i a baic requirement of all control ytem. Apart from that, good
What lies between Δx E, which represents the steam valve, and ΔP M, which is the mechanical power into the synchronous machine?
 A 2.0 Introduction In the lat et of note, we developed a model of the peed governing mechanim, which i given below: xˆ K ( Pˆ ˆ) E () In thee note, we want to extend thi model o that it relate the actual
A 2.0 Introduction In the lat et of note, we developed a model of the peed governing mechanim, which i given below: xˆ K ( Pˆ ˆ) E () In thee note, we want to extend thi model o that it relate the actual
Question 1 Equivalent Circuits
 MAE 40 inear ircuit Fall 2007 Final Intruction ) Thi exam i open book You may ue whatever written material you chooe, including your cla note and textbook You may ue a hand calculator with no communication
MAE 40 inear ircuit Fall 2007 Final Intruction ) Thi exam i open book You may ue whatever written material you chooe, including your cla note and textbook You may ue a hand calculator with no communication
CONTROL SYSTEMS. Chapter 5 : Root Locus Diagram. GATE Objective & Numerical Type Solutions. The transfer function of a closed loop system is
 CONTROL SYSTEMS Chapter 5 : Root Locu Diagram GATE Objective & Numerical Type Solution Quetion 1 [Work Book] [GATE EC 199 IISc-Bangalore : Mark] The tranfer function of a cloed loop ytem i T () where i
CONTROL SYSTEMS Chapter 5 : Root Locu Diagram GATE Objective & Numerical Type Solution Quetion 1 [Work Book] [GATE EC 199 IISc-Bangalore : Mark] The tranfer function of a cloed loop ytem i T () where i
Lecture 5 Introduction to control
 Lecture 5 Introduction to control Tranfer function reviited (Laplace tranform notation: ~jω) () i the Laplace tranform of v(t). Some rule: ) Proportionality: ()/ in () 0log log() v (t) *v in (t) () * in
Lecture 5 Introduction to control Tranfer function reviited (Laplace tranform notation: ~jω) () i the Laplace tranform of v(t). Some rule: ) Proportionality: ()/ in () 0log log() v (t) *v in (t) () * in
Design of Digital Filters
 Deign of Digital Filter Paley-Wiener Theorem [ ] ( ) If h n i a caual energy ignal, then ln H e dω< B where B i a finite upper bound. One implication of the Paley-Wiener theorem i that a tranfer function
Deign of Digital Filter Paley-Wiener Theorem [ ] ( ) If h n i a caual energy ignal, then ln H e dω< B where B i a finite upper bound. One implication of the Paley-Wiener theorem i that a tranfer function
ME 375 EXAM #1 Tuesday February 21, 2006
 ME 375 EXAM #1 Tueday February 1, 006 Diviion Adam 11:30 / Savran :30 (circle one) Name Intruction (1) Thi i a cloed book examination, but you are allowed one 8.5x11 crib heet. () You have one hour to
ME 375 EXAM #1 Tueday February 1, 006 Diviion Adam 11:30 / Savran :30 (circle one) Name Intruction (1) Thi i a cloed book examination, but you are allowed one 8.5x11 crib heet. () You have one hour to
Homework 7 Solution - AME 30315, Spring s 2 + 2s (s 2 + 2s + 4)(s + 20)
(s + 20)") 1 Homework 7 Solution - AME 30315, Spring 2015 Problem 1 [10/10 pt] Ue partial fraction expanion to compute x(t) when X 1 () = 4 2 + 2 + 4 Ue partial fraction expanion to compute x(t) when X 2 () = ( )
1 Homework 7 Solution - AME 30315, Spring 2015 Problem 1 [10/10 pt] Ue partial fraction expanion to compute x(t) when X 1 () = 4 2 + 2 + 4 Ue partial fraction expanion to compute x(t) when X 2 () = ( )
MM1: Basic Concept (I): System and its Variables
: System and its Variables") MM1: Baic Concept (I): Sytem and it Variable A ytem i a collection of component which are coordinated together to perform a function Sytem interact with their environment. The interaction i defined in
MM1: Baic Concept (I): Sytem and it Variable A ytem i a collection of component which are coordinated together to perform a function Sytem interact with their environment. The interaction i defined in
EE/ME/AE324: Dynamical Systems. Chapter 8: Transfer Function Analysis
 EE/ME/AE34: Dynamical Sytem Chapter 8: Tranfer Function Analyi The Sytem Tranfer Function Conider the ytem decribed by the nth-order I/O eqn.: ( n) ( n 1) ( m) y + a y + + a y = b u + + bu n 1 0 m 0 Taking
EE/ME/AE34: Dynamical Sytem Chapter 8: Tranfer Function Analyi The Sytem Tranfer Function Conider the ytem decribed by the nth-order I/O eqn.: ( n) ( n 1) ( m) y + a y + + a y = b u + + bu n 1 0 m 0 Taking
EXTENDED STABILITY MARGINS ON CONTROLLER DESIGN FOR NONLINEAR INPUT DELAY SYSTEMS. Otto J. Roesch, Hubert Roth, Asif Iqbal
 EXTENDED STABILITY MARGINS ON CONTROLLER DESIGN FOR NONLINEAR INPUT DELAY SYSTEMS Otto J. Roech, Hubert Roth, Aif Iqbal Intitute of Automatic Control Engineering Univerity Siegen, Germany {otto.roech,
EXTENDED STABILITY MARGINS ON CONTROLLER DESIGN FOR NONLINEAR INPUT DELAY SYSTEMS Otto J. Roech, Hubert Roth, Aif Iqbal Intitute of Automatic Control Engineering Univerity Siegen, Germany {otto.roech,
Chapter 6 Control Systems Design by Root-Locus Method. Lag-Lead Compensation. Lag lead Compensation Techniques Based on the Root-Locus Approach.
 hapter 6 ontrol Sytem Deign by Root-Lou Method Lag-Lead ompenation Lag lead ompenation ehnique Baed on the Root-Lou Approah. γ β K, ( γ >, β > ) In deigning lag lead ompenator, we onider two ae where γ
hapter 6 ontrol Sytem Deign by Root-Lou Method Lag-Lead ompenation Lag lead ompenation ehnique Baed on the Root-Lou Approah. γ β K, ( γ >, β > ) In deigning lag lead ompenator, we onider two ae where γ
Analysis of Stability &
 INC 34 Feedback Control Sytem Analyi of Stability & Steady-State Error S Wonga arawan.won@kmutt.ac.th Summary from previou cla Firt-order & econd order ytem repone τ ωn ζω ω n n.8.6.4. ζ ζ. ζ.5 ζ ζ.5 ct.8.6.4...4.6.8..4.6.8
INC 34 Feedback Control Sytem Analyi of Stability & Steady-State Error S Wonga arawan.won@kmutt.ac.th Summary from previou cla Firt-order & econd order ytem repone τ ωn ζω ω n n.8.6.4. ζ ζ. ζ.5 ζ ζ.5 ct.8.6.4...4.6.8..4.6.8
Homework #7 Solution. Solutions: ΔP L Δω. Fig. 1
 Homework #7 Solution Aignment:. through.6 Bergen & Vittal. M Solution: Modified Equation.6 becaue gen. peed not fed back * M (.0rad / MW ec)(00mw) rad /ec peed ( ) (60) 9.55r. p. m. 3600 ( 9.55) 3590.45r.
Homework #7 Solution Aignment:. through.6 Bergen & Vittal. M Solution: Modified Equation.6 becaue gen. peed not fed back * M (.0rad / MW ec)(00mw) rad /ec peed ( ) (60) 9.55r. p. m. 3600 ( 9.55) 3590.45r.
LOW ORDER MIMO CONTROLLER DESIGN FOR AN ENGINE DISTURBANCE REJECTION PROBLEM. P.Dickinson, A.T.Shenton
 LOW ORDER MIMO CONTROLLER DESIGN FOR AN ENGINE DISTURBANCE REJECTION PROBLEM P.Dickinon, A.T.Shenton Department of Engineering, The Univerity of Liverpool, Liverpool L69 3GH, UK Abtract: Thi paper compare
LOW ORDER MIMO CONTROLLER DESIGN FOR AN ENGINE DISTURBANCE REJECTION PROBLEM P.Dickinon, A.T.Shenton Department of Engineering, The Univerity of Liverpool, Liverpool L69 3GH, UK Abtract: Thi paper compare
A Comparative Study on Control Techniques of Non-square Matrix Distillation Column
 IJCTA, 8(3), 215, pp 1129-1136 International Science Pre A Comparative Study on Control Technique of Non-quare Matrix Ditillation Column 1 S Bhat Vinayambika, 2 S Shanmuga Priya, and 3 I Thirunavukkarau*
IJCTA, 8(3), 215, pp 1129-1136 International Science Pre A Comparative Study on Control Technique of Non-quare Matrix Ditillation Column 1 S Bhat Vinayambika, 2 S Shanmuga Priya, and 3 I Thirunavukkarau*
CHAPTER 8 OBSERVER BASED REDUCED ORDER CONTROLLER DESIGN FOR LARGE SCALE LINEAR DISCRETE-TIME CONTROL SYSTEMS
 CHAPTER 8 OBSERVER BASED REDUCED ORDER CONTROLLER DESIGN FOR LARGE SCALE LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.1 INTRODUCTION 8.2 REDUCED ORDER MODEL DESIGN FOR LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.3
CHAPTER 8 OBSERVER BASED REDUCED ORDER CONTROLLER DESIGN FOR LARGE SCALE LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.1 INTRODUCTION 8.2 REDUCED ORDER MODEL DESIGN FOR LINEAR DISCRETE-TIME CONTROL SYSTEMS 8.3
Figure 1: Unity Feedback System
 MEM 355 Sample Midterm Problem Stability 1 a) I the following ytem table? Solution: G() = Pole: -1, -2, -2, -1.5000 + 1.3229i, -1.5000-1.3229i 1 ( + 1)( 2 + 3 + 4)( + 2) 2 A you can ee, all pole are on
MEM 355 Sample Midterm Problem Stability 1 a) I the following ytem table? Solution: G() = Pole: -1, -2, -2, -1.5000 + 1.3229i, -1.5000-1.3229i 1 ( + 1)( 2 + 3 + 4)( + 2) 2 A you can ee, all pole are on
ECE382/ME482 Spring 2004 Homework 4 Solution November 14,
 ECE382/ME482 Spring 2004 Homework 4 Solution November 14, 2005 1 Solution to HW4 AP4.3 Intead of a contant or tep reference input, we are given, in thi problem, a more complicated reference path, r(t)
ECE382/ME482 Spring 2004 Homework 4 Solution November 14, 2005 1 Solution to HW4 AP4.3 Intead of a contant or tep reference input, we are given, in thi problem, a more complicated reference path, r(t)
THE PARAMETERIZATION OF ALL TWO-DEGREES-OF-FREEDOM SEMISTRONGLY STABILIZING CONTROLLERS. Tatsuya Hoshikawa, Kou Yamada and Yuko Tatsumi
 International Journal of Innovative Computing, Information Control ICIC International c 206 ISSN 349-498 Volume 2, Number 2, April 206 pp. 357 370 THE PARAMETERIZATION OF ALL TWO-DEGREES-OF-FREEDOM SEMISTRONGLY
International Journal of Innovative Computing, Information Control ICIC International c 206 ISSN 349-498 Volume 2, Number 2, April 206 pp. 357 370 THE PARAMETERIZATION OF ALL TWO-DEGREES-OF-FREEDOM SEMISTRONGLY
1 Routh Array: 15 points
 EE C28 / ME34 Problem Set 3 Solution Fall 2 Routh Array: 5 point Conider the ytem below, with D() k(+), w(t), G() +2, and H y() 2 ++2 2(+). Find the cloed loop tranfer function Y () R(), and range of k
EE C28 / ME34 Problem Set 3 Solution Fall 2 Routh Array: 5 point Conider the ytem below, with D() k(+), w(t), G() +2, and H y() 2 ++2 2(+). Find the cloed loop tranfer function Y () R(), and range of k
Hover and Forward Flight of an Autonomous UAV
 Hover and Forward Flight of an Autonomou UAV - uing Optimal Linear Control and Gain Scheduling Mater thei June 27 Group 135b AALBORG UNIVERSITY AAU Department of Control Engineering Intitute of Electronic
Hover and Forward Flight of an Autonomou UAV - uing Optimal Linear Control and Gain Scheduling Mater thei June 27 Group 135b AALBORG UNIVERSITY AAU Department of Control Engineering Intitute of Electronic
The Root Locus Method
 The Root Locu Method MEM 355 Performance Enhancement of Dynamical Sytem Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Outline The root locu method wa introduced by Evan
The Root Locu Method MEM 355 Performance Enhancement of Dynamical Sytem Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Outline The root locu method wa introduced by Evan
POWER SYSTEM SMALL SIGNAL STABILITY ANALYSIS BASED ON TEST SIGNAL
 POWE YEM MALL INAL ABILIY ANALYI BAE ON E INAL Zheng Xu, Wei hao, Changchun Zhou Zheang Univerity, Hangzhou, 37 PChina Email: hvdc@ceezueducn Abtract - In thi paper, a method baed on ome tet ignal (et
POWE YEM MALL INAL ABILIY ANALYI BAE ON E INAL Zheng Xu, Wei hao, Changchun Zhou Zheang Univerity, Hangzhou, 37 PChina Email: hvdc@ceezueducn Abtract - In thi paper, a method baed on ome tet ignal (et
CONTROL SYSTEMS. Chapter 2 : Block Diagram & Signal Flow Graphs GATE Objective & Numerical Type Questions
 ONTOL SYSTEMS hapter : Bloc Diagram & Signal Flow Graph GATE Objective & Numerical Type Quetion Quetion 6 [Practice Boo] [GATE E 994 IIT-Kharagpur : 5 Mar] educe the ignal flow graph hown in figure below,
ONTOL SYSTEMS hapter : Bloc Diagram & Signal Flow Graph GATE Objective & Numerical Type Quetion Quetion 6 [Practice Boo] [GATE E 994 IIT-Kharagpur : 5 Mar] educe the ignal flow graph hown in figure below,
EE Control Systems LECTURE 6
 Copyright FL Lewi 999 All right reerved EE - Control Sytem LECTURE 6 Updated: Sunday, February, 999 BLOCK DIAGRAM AND MASON'S FORMULA A linear time-invariant (LTI) ytem can be repreented in many way, including:
Copyright FL Lewi 999 All right reerved EE - Control Sytem LECTURE 6 Updated: Sunday, February, 999 BLOCK DIAGRAM AND MASON'S FORMULA A linear time-invariant (LTI) ytem can be repreented in many way, including:
CONTROL OF INTEGRATING PROCESS WITH DEAD TIME USING AUTO-TUNING APPROACH
 Brazilian Journal of Chemical Engineering ISSN 004-6632 Printed in Brazil www.abeq.org.br/bjche Vol. 26, No. 0, pp. 89-98, January - March, 2009 CONROL OF INEGRAING PROCESS WIH DEAD IME USING AUO-UNING
Brazilian Journal of Chemical Engineering ISSN 004-6632 Printed in Brazil www.abeq.org.br/bjche Vol. 26, No. 0, pp. 89-98, January - March, 2009 CONROL OF INEGRAING PROCESS WIH DEAD IME USING AUO-UNING
Root Locus Diagram. Root loci: The portion of root locus when k assume positive values: that is 0
 Objective Root Locu Diagram Upon completion of thi chapter you will be able to: Plot the Root Locu for a given Tranfer Function by varying gain of the ytem, Analye the tability of the ytem from the root
Objective Root Locu Diagram Upon completion of thi chapter you will be able to: Plot the Root Locu for a given Tranfer Function by varying gain of the ytem, Analye the tability of the ytem from the root
Homework Assignment No. 3 - Solutions
 ECE 6440 Summer 2003 Page 1 Homework Aignment o. 3 Problem 1 (10 point) Aume an LPLL ha F() 1 and the PLL parameter are 0.8V/radian, K o 100 MHz/V, and the ocillation frequency, f oc 500MHz. Sketch the
ECE 6440 Summer 2003 Page 1 Homework Aignment o. 3 Problem 1 (10 point) Aume an LPLL ha F() 1 and the PLL parameter are 0.8V/radian, K o 100 MHz/V, and the ocillation frequency, f oc 500MHz. Sketch the
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuits II. R 4 := 100 kohm
 SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2003. Cacaded Op Amp [DC&L, problem 4.29] An ideal op amp ha an output impedance of zero,
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2003. Cacaded Op Amp [DC&L, problem 4.29] An ideal op amp ha an output impedance of zero,
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuits II. Solutions to Assignment 3 February 2005.
 SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2005. Initial Condition Source 0 V battery witch flip at t 0 find i 3 (t) Component value:
SIMON FRASER UNIVERSITY School of Engineering Science ENSC 320 Electric Circuit II Solution to Aignment 3 February 2005. Initial Condition Source 0 V battery witch flip at t 0 find i 3 (t) Component value:
Lecture 8 - SISO Loop Design
 Lecture 8 - SISO Loop Deign Deign approache, given pec Loophaping: in-band and out-of-band pec Fundamental deign limitation for the loop Gorinevky Control Engineering 8-1 Modern Control Theory Appy reult
Lecture 8 - SISO Loop Deign Deign approache, given pec Loophaping: in-band and out-of-band pec Fundamental deign limitation for the loop Gorinevky Control Engineering 8-1 Modern Control Theory Appy reult
PIM Digital Redesign and Experiments of a Roll-Angle Controller for a VTOL-UAV
 1 roceeding of the International Conference on Information and Automation, December 15-1, 5, Colombo, Sri Lanka. IM Digital Redeign and Experiment of a Roll-Angle Controller for a VTOL-UAV Takahi Kahimura*
1 roceeding of the International Conference on Information and Automation, December 15-1, 5, Colombo, Sri Lanka. IM Digital Redeign and Experiment of a Roll-Angle Controller for a VTOL-UAV Takahi Kahimura*
S_LOOP: SINGLE-LOOP FEEDBACK CONTROL SYSTEM ANALYSIS
 S_LOOP: SINGLE-LOOP FEEDBACK CONTROL SYSTEM ANALYSIS by Michelle Gretzinger, Daniel Zyngier and Thoma Marlin INTRODUCTION One of the challenge to the engineer learning proce control i relating theoretical
S_LOOP: SINGLE-LOOP FEEDBACK CONTROL SYSTEM ANALYSIS by Michelle Gretzinger, Daniel Zyngier and Thoma Marlin INTRODUCTION One of the challenge to the engineer learning proce control i relating theoretical
Massachusetts Institute of Technology Dynamics and Control II
 I E Maachuett Intitute of Technology Department of Mechanical Engineering 2.004 Dynamic and Control II Laboratory Seion 5: Elimination of Steady-State Error Uing Integral Control Action 1 Laboratory Objective:
I E Maachuett Intitute of Technology Department of Mechanical Engineering 2.004 Dynamic and Control II Laboratory Seion 5: Elimination of Steady-State Error Uing Integral Control Action 1 Laboratory Objective:
An Approach to Design MIMO FO Controllers for Unstable Nonlinear Plants
 338 IEEE/CAA JOURAL OF AUTOMATICA SIICA VOL. 3 O. 3 JULY 26 An Approach to Deign MIMO FO Controller for Untable onlinear Plant Arturo Roja-Moreno Senior Member IEEE Abtract Thi paper develop an approach
338 IEEE/CAA JOURAL OF AUTOMATICA SIICA VOL. 3 O. 3 JULY 26 An Approach to Deign MIMO FO Controller for Untable onlinear Plant Arturo Roja-Moreno Senior Member IEEE Abtract Thi paper develop an approach
Lecture 6: Resonance II. Announcements
 EES 5 Spring 4, Lecture 6 Lecture 6: Reonance II EES 5 Spring 4, Lecture 6 Announcement The lab tart thi week You mut how up for lab to tay enrolled in the coure. The firt lab i available on the web ite,
EES 5 Spring 4, Lecture 6 Lecture 6: Reonance II EES 5 Spring 4, Lecture 6 Announcement The lab tart thi week You mut how up for lab to tay enrolled in the coure. The firt lab i available on the web ite,
Exercises for lectures 19 Polynomial methods
 Exercie for lecture 19 Polynomial method Michael Šebek Automatic control 016 15-4-17 Diviion of polynomial with and without remainder Polynomial form a circle, but not a body. (Circle alo form integer,
Exercie for lecture 19 Polynomial method Michael Šebek Automatic control 016 15-4-17 Diviion of polynomial with and without remainder Polynomial form a circle, but not a body. (Circle alo form integer,
MEM 355 Performance Enhancement of Dynamical Systems Root Locus Analysis
 MEM 355 Performance Enhancement of Dynamical Sytem Root Locu Analyi Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Outline The root locu method wa introduced by Evan in
MEM 355 Performance Enhancement of Dynamical Sytem Root Locu Analyi Harry G. Kwatny Department of Mechanical Engineering & Mechanic Drexel Univerity Outline The root locu method wa introduced by Evan in
Stability regions in controller parameter space of DC motor speed control system with communication delays
 Stability region in controller parameter pace of DC motor peed control ytem with communication delay Şahin Sönmez, Saffet Ayaun Department of Electrical and Electronic Engineering, Nigde Univerity, 5124,
Stability region in controller parameter pace of DC motor peed control ytem with communication delay Şahin Sönmez, Saffet Ayaun Department of Electrical and Electronic Engineering, Nigde Univerity, 5124,
5.5 Application of Frequency Response: Signal Filters
 44 Dynamic Sytem Second order lowpa filter having tranfer function H()=H ()H () u H () H () y Firt order lowpa filter Figure 5.5: Contruction of a econd order low-pa filter by combining two firt order
44 Dynamic Sytem Second order lowpa filter having tranfer function H()=H ()H () u H () H () y Firt order lowpa filter Figure 5.5: Contruction of a econd order low-pa filter by combining two firt order
Chapter #4 EEE8013. Linear Controller Design and State Space Analysis. Design of control system in state space using Matlab
 EEE83 hapter #4 EEE83 Linear ontroller Deign and State Space nalyi Deign of control ytem in tate pace uing Matlab. ontrollabilty and Obervability.... State Feedback ontrol... 5 3. Linear Quadratic Regulator
EEE83 hapter #4 EEE83 Linear ontroller Deign and State Space nalyi Deign of control ytem in tate pace uing Matlab. ontrollabilty and Obervability.... State Feedback ontrol... 5 3. Linear Quadratic Regulator
EXPERIMENTAL VALIDATION OF A NUMERICAL CONTROLLER USING CONVEX OPTIMIZATION WITH LINEAR MATRIX INEQUALITIES ON A QUARTER-CAR SUSPENSION SYSTEM
 EXPERIMENAL VALIDAION OF A NUMERICAL CONROLLER USING CONVEX OPIMIZAION WIH LINEAR MARIX INEQUALIIES ON A QUARER-CAR SUSPENSION SYSEM A hei by ROHI HARI CHINALA Submitted to the Office of Graduate Studie
EXPERIMENAL VALIDAION OF A NUMERICAL CONROLLER USING CONVEX OPIMIZAION WIH LINEAR MARIX INEQUALIIES ON A QUARER-CAR SUSPENSION SYSEM A hei by ROHI HARI CHINALA Submitted to the Office of Graduate Studie
Chapter 13. Root Locus Introduction
 Chapter 13 Root Locu 13.1 Introduction In the previou chapter we had a glimpe of controller deign iue through ome imple example. Obviouly when we have higher order ytem, uch imple deign technique will
Chapter 13 Root Locu 13.1 Introduction In the previou chapter we had a glimpe of controller deign iue through ome imple example. Obviouly when we have higher order ytem, uch imple deign technique will
SMALL-SIGNAL STABILITY ASSESSMENT OF THE EUROPEAN POWER SYSTEM BASED ON ADVANCED NEURAL NETWORK METHOD
 SMALL-SIGNAL STABILITY ASSESSMENT OF THE EUROPEAN POWER SYSTEM BASED ON ADVANCED NEURAL NETWORK METHOD S.P. Teeuwen, I. Erlich U. Bachmann Univerity of Duiburg, Germany Department of Electrical Power Sytem
SMALL-SIGNAL STABILITY ASSESSMENT OF THE EUROPEAN POWER SYSTEM BASED ON ADVANCED NEURAL NETWORK METHOD S.P. Teeuwen, I. Erlich U. Bachmann Univerity of Duiburg, Germany Department of Electrical Power Sytem
CONTROL SYSTEMS LABORATORY ECE311 LAB 3: Control Design Using the Root Locus
 CONTROL SYSTEMS LABORATORY ECE311 LAB 3: Control Deign Uing the Root Locu 1 Purpoe The purpoe of thi lbortory i to deign cruie control ytem for cr uing the root locu. 2 Introduction Diturbnce D( ) = d
CONTROL SYSTEMS LABORATORY ECE311 LAB 3: Control Deign Uing the Root Locu 1 Purpoe The purpoe of thi lbortory i to deign cruie control ytem for cr uing the root locu. 2 Introduction Diturbnce D( ) = d
Throttle Actuator Swapping Modularity Design for Idle Speed Control
 9 merican ontrol onference Hyatt Regency Riverfront, St. Loui, MO, US June -, 9 ThB.4 Throttle ctuator Swapping Modularity Deign for Idle Speed ontrol Shifang Li, Melih akmakci, Ilya V. Kolmanovky and.
9 merican ontrol onference Hyatt Regency Riverfront, St. Loui, MO, US June -, 9 ThB.4 Throttle ctuator Swapping Modularity Deign for Idle Speed ontrol Shifang Li, Melih akmakci, Ilya V. Kolmanovky and.
Digital Control System
 Digital Control Sytem Summary # he -tranform play an important role in digital control and dicrete ignal proceing. he -tranform i defined a F () f(k) k () A. Example Conider the following equence: f(k)
Digital Control Sytem Summary # he -tranform play an important role in digital control and dicrete ignal proceing. he -tranform i defined a F () f(k) k () A. Example Conider the following equence: f(k)
Lecture 12: Examples of Root Locus Plots. Dr. Kalyana Veluvolu. Lecture 12: Examples of Root Locus Plots Dr. Kalyana Veluvolu
 ROOT-LOCUS ANALYSIS Example: Given that G( ) ( + )( + ) Dr. alyana Veluvolu Sketch the root locu of 1 + G() and compute the value of that will yield a dominant econd order behavior with a damping ratio,
ROOT-LOCUS ANALYSIS Example: Given that G( ) ( + )( + ) Dr. alyana Veluvolu Sketch the root locu of 1 + G() and compute the value of that will yield a dominant econd order behavior with a damping ratio,
Main Topics: The Past, H(s): Poles, zeros, s-plane, and stability; Decomposition of the complete response.
: Poles, zeros, s-plane, and stability; Decomposition of the complete response.") EE202 HOMEWORK PROBLEMS SPRING 18 TO THE STUDENT: ALWAYS CHECK THE ERRATA on the web. Quote for your Parent' Partie: 1. Only with nodal analyi i the ret of the emeter a poibility. Ray DeCarlo 2. (The need
EE202 HOMEWORK PROBLEMS SPRING 18 TO THE STUDENT: ALWAYS CHECK THE ERRATA on the web. Quote for your Parent' Partie: 1. Only with nodal analyi i the ret of the emeter a poibility. Ray DeCarlo 2. (The need
Part A: Signal Processing. Professor E. Ambikairajah UNSW, Australia
 Part A: Signal Proceing Chapter 5: Digital Filter Deign 5. Chooing between FIR and IIR filter 5. Deign Technique 5.3 IIR filter Deign 5.3. Impule Invariant Method 5.3. Bilinear Tranformation 5.3.3 Digital
Part A: Signal Proceing Chapter 5: Digital Filter Deign 5. Chooing between FIR and IIR filter 5. Deign Technique 5.3 IIR filter Deign 5.3. Impule Invariant Method 5.3. Bilinear Tranformation 5.3.3 Digital
ECE-202 Exam 1 January 31, Name: (Please print clearly.) CIRCLE YOUR DIVISION DeCarlo DeCarlo 7:30 MWF 1:30 TTH
 CIRCLE YOUR DIVISION DeCarlo DeCarlo 7:30 MWF 1:30 TTH") ECE-0 Exam January 3, 08 Name: (Pleae print clearly.) CIRCLE YOUR DIVISION 0 0 DeCarlo DeCarlo 7:30 MWF :30 TTH INSTRUCTIONS There are multiple choice worth 5 point each and workout problem worth 40 point.
ECE-0 Exam January 3, 08 Name: (Pleae print clearly.) CIRCLE YOUR DIVISION 0 0 DeCarlo DeCarlo 7:30 MWF :30 TTH INSTRUCTIONS There are multiple choice worth 5 point each and workout problem worth 40 point.
Control Issues for Velocity Sourced Series Elastic Actuators
 Control Iue for Velocity Sourced Serie Elatic Actuator Gordon Wyeth School of Information Technology and Electrical Engineering Univerity of Queenland wyeth@itee.uq.edu.au Abtract The Serie Elaic Actuator
Control Iue for Velocity Sourced Serie Elatic Actuator Gordon Wyeth School of Information Technology and Electrical Engineering Univerity of Queenland wyeth@itee.uq.edu.au Abtract The Serie Elaic Actuator
Lecture #9 Continuous time filter
 Lecture #9 Continuou time filter Oliver Faut December 5, 2006 Content Review. Motivation......................................... 2 2 Filter pecification 2 2. Low pa..........................................
Lecture #9 Continuou time filter Oliver Faut December 5, 2006 Content Review. Motivation......................................... 2 2 Filter pecification 2 2. Low pa..........................................
EE Control Systems LECTURE 14
 Updated: Tueday, March 3, 999 EE 434 - Control Sytem LECTURE 4 Copyright FL Lewi 999 All right reerved ROOT LOCUS DESIGN TECHNIQUE Suppoe the cloed-loop tranfer function depend on a deign parameter k We
Updated: Tueday, March 3, 999 EE 434 - Control Sytem LECTURE 4 Copyright FL Lewi 999 All right reerved ROOT LOCUS DESIGN TECHNIQUE Suppoe the cloed-loop tranfer function depend on a deign parameter k We
PI control system design for Electromagnetic Molding Machine based on Linear Programing
 PI control ytem deign for Electromagnetic Molding Machine baed on Linear Programing Takayuki Ihizaki, Kenji Kahima, Jun-ichi Imura*, Atuhi Katoh and Hirohi Morita** Abtract In thi paper, we deign a PI
PI control ytem deign for Electromagnetic Molding Machine baed on Linear Programing Takayuki Ihizaki, Kenji Kahima, Jun-ichi Imura*, Atuhi Katoh and Hirohi Morita** Abtract In thi paper, we deign a PI
A Simplified Dynamics Block Diagram for a Four-Axis Stabilized Platform
 A Simplified Dynamic Block Diagram for a FourAxi Stabilized Platform Author: Hendrik Daniël Mouton a Univerity of Cape Town, Rondeboch, Cape Town, South Africa, 770 Abtract: t i relatively traightforward
A Simplified Dynamic Block Diagram for a FourAxi Stabilized Platform Author: Hendrik Daniël Mouton a Univerity of Cape Town, Rondeboch, Cape Town, South Africa, 770 Abtract: t i relatively traightforward
Automatic Control Systems. Part III: Root Locus Technique
 www.pdhcenter.com PDH Coure E40 www.pdhonline.org Automatic Control Sytem Part III: Root Locu Technique By Shih-Min Hu, Ph.D., P.E. Page of 30 www.pdhcenter.com PDH Coure E40 www.pdhonline.org VI. Root
www.pdhcenter.com PDH Coure E40 www.pdhonline.org Automatic Control Sytem Part III: Root Locu Technique By Shih-Min Hu, Ph.D., P.E. Page of 30 www.pdhcenter.com PDH Coure E40 www.pdhonline.org VI. Root
Longitudinal automatic control system for a light weight aircraft
 Longitudinal automatic control ytem for a light eight aircraft Critian VIDAN*,, Silviu Ionut BADEA *Correponding author Military echnical Academy, Faculty of Mechatronic and Integrated Armament Sytem,
Longitudinal automatic control ytem for a light eight aircraft Critian VIDAN*,, Silviu Ionut BADEA *Correponding author Military echnical Academy, Faculty of Mechatronic and Integrated Armament Sytem,
A Simple Approach to Synthesizing Naïve Quantized Control for Reference Tracking
 A Simple Approach to Syntheizing Naïve Quantized Control for Reference Tracking SHIANG-HUA YU Department of Electrical Engineering National Sun Yat-Sen Univerity 70 Lien-Hai Road, Kaohiung 804 TAIAN Abtract:
A Simple Approach to Syntheizing Naïve Quantized Control for Reference Tracking SHIANG-HUA YU Department of Electrical Engineering National Sun Yat-Sen Univerity 70 Lien-Hai Road, Kaohiung 804 TAIAN Abtract:
Solutions. Digital Control Systems ( ) 120 minutes examination time + 15 minutes reading time at the beginning of the exam
 120 minutes examination time + 15 minutes reading time at the beginning of the exam") BSc - Sample Examination Digital Control Sytem (5-588-) Prof. L. Guzzella Solution Exam Duration: Number of Quetion: Rating: Permitted aid: minute examination time + 5 minute reading time at the beginning
BSc - Sample Examination Digital Control Sytem (5-588-) Prof. L. Guzzella Solution Exam Duration: Number of Quetion: Rating: Permitted aid: minute examination time + 5 minute reading time at the beginning
Correction for Simple System Example and Notes on Laplace Transforms / Deviation Variables ECHE 550 Fall 2002
 Correction for Simple Sytem Example and Note on Laplace Tranform / Deviation Variable ECHE 55 Fall 22 Conider a tank draining from an initial height of h o at time t =. With no flow into the tank (F in
Correction for Simple Sytem Example and Note on Laplace Tranform / Deviation Variable ECHE 55 Fall 22 Conider a tank draining from an initial height of h o at time t =. With no flow into the tank (F in
Parameter Setting Method of Fractional Order PI λ D μ Controller Based on Bode s Ideal Transfer Function and its Application in Buck Converter
 Parameter Setting Method of Fractional Order PI λ D μ Controller Baed on Bode Ideal Tranfer Function and it Application in Buck Converter Yiwen He, a, Zhen Li,b School of Mechanical and Automotive Engineering,
Parameter Setting Method of Fractional Order PI λ D μ Controller Baed on Bode Ideal Tranfer Function and it Application in Buck Converter Yiwen He, a, Zhen Li,b School of Mechanical and Automotive Engineering,