Optimal transport for Seismic Imaging
|
|
|
- Dorothy Tamsin Higgins
- 6 years ago
- Views:
Transcription
1 Optimal transport for Seismic Imaging Bjorn Engquist In collaboration with Brittany Froese and Yunan Yang ICERM Workshop - Recent Advances in Seismic Modeling and Inversion: From Analysis to Applications, Brown University, November 6-10, 2017
2 Outline 1. Remarks on Full Waveform Inversion (FWI) 2. Measures of mismatch 3. Optimal transport and Wasserstein metric 4. Monge-Ampère equation and its numerical approximation 5. Applications to full waveform inversion 6. Conclusions Background: matching problem and technique
 ( u comp (m) u data A + λ Lv")
3 1. Remarks on Full Waveform Inversion (FWI) Full Waveform Inversion is an increasingly important technique in the inverse seismic imaging process It is a PDE constrained optimization formulation Model parameters v are determined to fit data min m(x) ( u comp (m) u data A + λ Lv ) B
4 FWI: PDE constrained optimization FWI: Measured and processed data is compared to a computed wave field based on model parameters v to be determined (for example, P-wave velocity) min m(x) ( u comp (m) u data A + λ Lv ) B. A measure of mismatch L 2 the standard choice Lc B potential regularization term, which we will omit for this presentation at the surface Over determined boundary conditions at the surface
 2 Δu, Efficient optimization Adjoint state method for gradient")
5 Mathematical and computational challenges Important computational steps Relevant measure of mismatch ( ) Fast wave field solver In our case scalar wave equation in time or frequency domain, for example u tt = m(x) 2 Δu, Efficient optimization Adjoint state method for gradient computation
6 2. Measures of mismatch We will denote the computed wave field by f(x,t;v) and the data by g(x,t), u comp (x,t;m) = f (x,t;m), u data (x,t) = g(x,t) The common and original measure of mismatch between the computed signal f and the measured data g is L 2, [Tarantola, 1984, 1986] min m f m g L2 We will make some remarks on different Measures of mismatch starting with local estimates to more global
7 Global minimum It can be expected that the mismatch functional will have local minima that complicates minimization algorithms Ideally, local minima different from the global min should be avoided for some natural parameterizations as shift and dilations (f (t) = g(at - s)) Shift as a function of t, dilation as a function of x u tt = m 2 u xx, x > 0, t > 0 u(0,t) = u 0 (t) u = u 0 (t x / m)
8 Local measures In the L 2 local mismatch, estimators f and g are compared point wise, J(v) = f g L2 = ( f (x i,t j ) g(x i,t j ) 2 ) 1/2 i, j This works well if the starting values for the model parameters are good otherwise there is risk for trapping in local minima cycle skipping
9 Cycle skipping The need for better mismatch functionals can be seen from a simple shift example small basin of attraction For other examples, [Vireux et al 2009] L 2 2 Shift or displacement Cycle skipping Local minima
10 Global measures Different measures have been introduced to to compare all of f and g not just point wise. Integrated functions NIM [Liu et al 2014] [Donno et al 2014] Stationary marching filters Example AWI, [Warner et al 2014] Non-stationary marching filters Example [Fomel et al 2013] Measures based on optimal transport ( )
11 Integrated functions f and g are integrated, typically in 1D-time, before L 2 comparison J = F G L2 = ( F(x i,t j ) G(x i,t j ) 2 ) 1/2, i, j j j F i, j = f (x i,t k ), G i, j = g(x i,t k ), k=1 In mathematical notation this is the H -1 semi-norm Slight increase in wave length for short signals (Ricker wavelet) Often applied to modified signals like squaring scaling or envelope to have f and g positive and with equal integral k=1
12 Matching filters The filter based measures typically has two steps Computing filter coefficients K K = argmin K f g L2 Estimation of difference between computed filter and the identity map. K I The filter can be stationary or non-stationary The optimal transport based techniques Does this in one step Minimization is of a measure of transform K or as it is called transport
 f to the other: g")
 g(y) Compare travel time distance Classic in")
13 3. Optimal transport and Wasserstein metric Wasserstein metric measures the cost for optimally transport one measure (signal) f to the other: g Monge-Kantorivich optimal transport measure earth movers distance in computer science f(x) g(y) Compare travel time distance Classic in seismology
14 Optimal transport and Wasserstein metric The Wasserstein metric is directly based on one cost function Signals in exploration seismology are not as clean as above and a robust functional combining features of L 2 and travel time is desirable Extensive mathematical foundation f(x) g(y)
15 Wasserstein distance W p ( f, g) = inf γ d(x, y) p dγ(x, y) Here the plan T is the optimal transport map from positive Borel measures f to g of equal mass Well developed mathematical theory, [Villani, 2003, 2009] X Y γ Γ X Y, the set of product measure : f and g f (x)dx = g(y)dy, f, g 0 X Y 1/p 2 W 2 ( f, g) = inf x T f,g (x) T f,g 2 f (x)dx X 1/2
16 Wasserstein distance s f g distance = s 2 (mass)
17 Wasserstein distance s f g In this model example W 2 and L 2 is equal (modulo a constant) to leading order when separation distance s is small. Recall L 2 is the standard measure
18 Wasserstein distance s f g When s is large W 2 = s = travel distance (time), ( higher frequency ), L 2 independent of s Potential for avoiding cycle skipping
19 Wasserstein distance vs L 2 Fidelity measure Cycle skipping Local minima L 2 2 Function of displacement
20 Wasserstein distance vs L 2 Fidelity measure L 2 2 W 2 2
21 Wasserstein distance vs L 2 Fidelity measure This is the basic motivation for exploring Wasserstein metric to measure the misfit Local min are well known problems L 2 2 W 2 2
22 Wasserstein distance vs L 2 Fidelity measure We will see that there are hidden difficulties in making this work in practice Normalized signal in right frame L 2 2 W 2 2
23 Analysis Theorem 1: W 2 2 is convex with respect to translation, s and dilation, a, W 2 2 ( f, g)[α, s], f (x) = g(ax s)α d, a > 0, x, s R d Theorem 2: W 2 2 is convex with respect to local amplitude change, λ # % g(x)λ, x Ω W ( f, g)[β], f (x) = $ β R, Ω = Ω 1 Ω 2 &% βg(x)λ, x Ω 2 λ = ( ) gdx / gdx + β gdx Ω Ω2 Ω 1 (L 2 only satisfies 2 nd theorem)
24 Remarks The scalar dilation ax can be generalized to Ax where A is a positive definite matrix. Convexity is then in terms of the eigenvalues The proof of theorem 1 is based on c-cyclic monotonicity ( x j, x j ) ( ) c( x j, x σ ( j) ) { } Γ c x j, x j The proof of theorem two is based on the inequality j W 2 2 (sf 1 + (1 s) f 2, g) sw 2 2 ( f 1, g)+ (1 s)w 2 2 ( f 2, g) j
25 Illustration: discrete proof (theorem 1) Equal point masses then weak limit for generl theorem alternative to using the c-cyclic propery
26 Illustration: discrete proof W 2 2 = min σ min σ min σ $ & % $ & % x ο j J j=1 J j=1 J j=1 x ο j x j x ο j x j x ο j (x j sξ) 2 2 = x j σ j = j 2 = ( σ : permutation) J ' 2s ( x ο j x ) j ξ + J sξ 2 ) = j=1 ( ' + J sξ 2 J J ), from x ο j = x j ( j=1 j=1

27 Noise W 2 2 less sensitive to noise than L 2 Theorem 3: f = g + δ, δ uniformly distributed uncorrelated random noise, (f > 0), discrete i.e. piecewise constant: N intervals Proof by domain decomposition dimension by dimension and standard deviation estimates using closed 1D formula 2 f g L2 = O (1), W 2 2 f = ( f 1, f 2,.., f J ) ( f g) = O(N 1 )
28 Computing the optimal transport In 1D, optimal transport is equivalent to sorting with efficient numerical algorithms O(Nlog(N)) complexity, N data points W 2 ( f, g) = F(x) = ( F 1 (y) G 1 (y))dy x x f (ξ)dξ, g(x) = g(ξ)dξ In higher dimensions such combinatorial methods as the Hungarian algorithm are very costly O(N 3 ), Alternatives: linear programming, sliced Wasserstein, ADMM
29 Computing of optimal transport For higher dimensions fortunately the optimal transport related to W 2 can be solved via a Monge-Ampère equation [Brenier 1991, 1998] 2 W 2 ( f, g) = x u(x) 2 X f (x)dx ( ) = f (x) / g( u(x)) det D 2 (u) Brenier map T(x) = u(x) 1/2 Recently there are now alternative PDF formulations
30 4. Monge-Ampère equation and its numerical approximation Nonlinear equation with potential loss of regularity Weak viscosity solution u if u is both a sub and super solution Sub solution (super analogous) x 0 ( ) f (x) = 0, u convex, f C 0 (Ω) det D 2 (u) Ω, if local max of u φ, then ( ) f (x 0 ) det D 2 φ 1D u xx = f, φ(x 0 ) = u(x 0 ), φ(x 0 ) = u(x 0 ), φ(x) u(x) φ xx f
31 Numerical approximation Consistent, stable and monotone finite difference approximations will converge to Monge-Ampère viscosity solutions [Barles, Souganidis, 1991] ( ) = u v j v j det D 2 u d + j=1 ( ) { v j }: eigenvectors of D 2 u [Benamou, Froese, Oberman, 2014]

32 5. Applications to full waveform inversion First example: Problem with reflection from two layers dependence on parameters, with Froese. S R t Robust convergence with direct minimization algorithm (Simplex) geometrical optics and positive f, g Offset = R-S

33 Reflections and inversion example L 2 W 2
34 Gradient for optimization For large scale optimization, gradient of J(f) = W 22 (f,g) with respect to wave velocity is required in a quasi Newton method in the PDE constrained optimization step Based on linearization of J and Monge-Ampère equation resulting in linear elliptic PDE (adjoint source) J +δj = ( f +δ f ) x (u f +δu) 2 dx f +δ f = g( (u f +δu))det(d 2 (u f +δu)) L(v) = g( u f )tr((d 2 u f ) D 2 (v))+ det(d 2 u f )g( u f ) v = δ f
35 W2 Remarks + Captures important features of distance in both travel time and L 2, Convexity with respect to natural parameters + There exists fast algorithms and technique robust vs. noise - Constraints that are not natural for seismology X f (x)dx = g(y)dy, f, g 0, g > 0, M A Y Normalize: transform f, g to be positive and with the same integral
36 Large scale applications Early normalizations: squaring, consider positive and negative parts of f and g separately not appropriate for adjoint state technique Successful normalization linear!f (x) = ( f (x)+ c) / ( f (x)+ c)dx,!g(x) =... Efficient alternative to W 2 (2D): trace by trace W 2 (1D) coupled to L 2 [Yang et al 2016] Other alternatives, W 1, unbalanced transport [Chizat et al 2015], Dual formulation of optimal transport Normalized W 2 + λl 2 is an unbalanced transport measure, λ > 0

37 Applications Seismic test cases Marmousi model (velocity field) Original model and initial velocity field to start optimization



38 Marmousi model Original and FWI reconstruction with different initializations: W 2-1D, W 2-2D, L 2
39 Marmousi model Robustness to noise: good for data but allows for oscillations in optimal computed velocity, numerical M A errors Remedy: trace by trace, TV - regularization



40 Marmousi model Robustness to noise: good for data but allows for oscillations in optimal computed velocity, numerical M A errors Remedy: trace by trace, TV - regularization W 2 W 1


41 BP 2004 model High contrast salt deposit, W 2-1D, W 2-2D, L 2
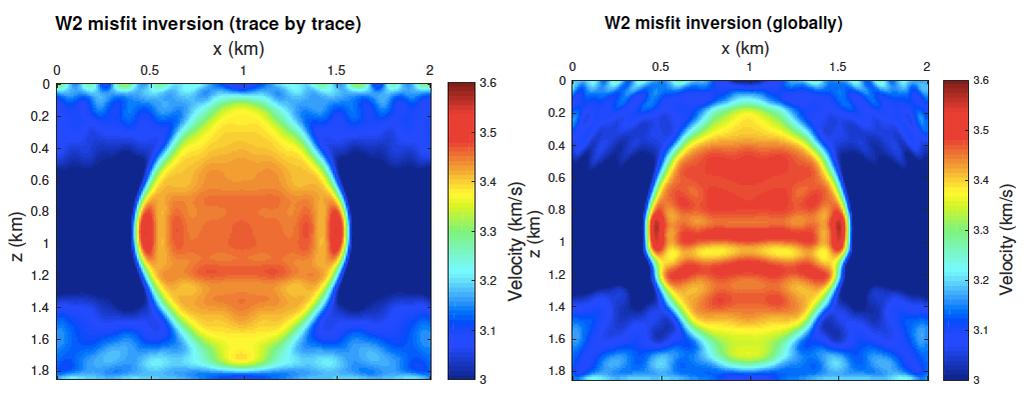
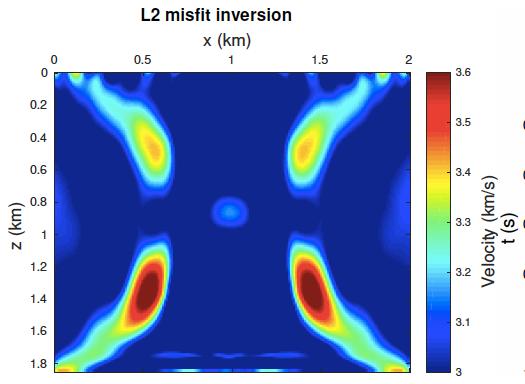
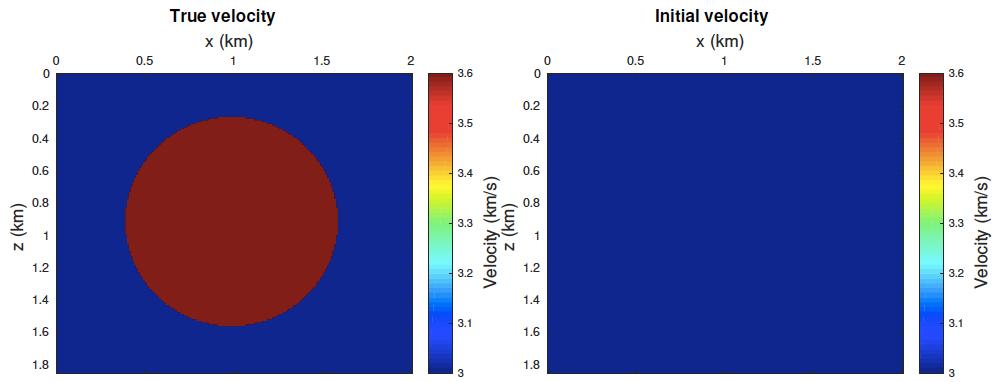
42 Camembert

![al, 2016] Similar quality but more sensitive](/docs-images/76/74054891/images/43-2.jpg "to noise and L 2 when f g Solver with better")
43 W 1 example Example below: W 1 measure and Marmousi p-velocity model [Metivier et. al, 2016] Similar quality but more sensitive to noise and L 2 when f g Solver with better 2D performance


44 W 2 with noise Slightly temporally correlated uniformly distributed noise
45 Remarks Troubling issues Theoretical results of convexity based on normalized signals of the form squaring etc. but not practically useful (squaring: not sign sensitive, requires compact support and problem with adjoint state method) The practically working normalization based on linear normalization does not satisfy convexity with respect to shifts

46 Remarks Linear scaling: misfit as function of shift, Ricker wavelet Function of velocity parameters: v = v p + αz [Metivier et. al, 2016]
47 Remarks New and currently best normalization!f (x) = ˆf f (x)+ c (x) / ˆf (x)dx, ˆf 1, x 0 (x) = c 1 exp(cf (x), x < 0 Good in practice allows for less accurate initial mode than linear scaling Satisfies our theorems!f for c large enough c 1 f
48 6. Conclusions Optimal transport and the Wasserstein metric are promising tools in seismic imaging Theory and basic algorithms need to be modified to handle realistic seismic data Ready for field data, [PGS, SEG2017, North Sea]
Seismic imaging and optimal transport
 Seismic imaging and optimal transport Bjorn Engquist In collaboration with Brittany Froese, Sergey Fomel and Yunan Yang Brenier60, Calculus of Variations and Optimal Transportation, Paris, January 10-13,
Seismic imaging and optimal transport Bjorn Engquist In collaboration with Brittany Froese, Sergey Fomel and Yunan Yang Brenier60, Calculus of Variations and Optimal Transportation, Paris, January 10-13,
Full Waveform Inversion via Matched Source Extension
 Full Waveform Inversion via Matched Source Extension Guanghui Huang and William W. Symes TRIP, Department of Computational and Applied Mathematics May 1, 215, TRIP Annual Meeting G. Huang and W. W. Symes
Full Waveform Inversion via Matched Source Extension Guanghui Huang and William W. Symes TRIP, Department of Computational and Applied Mathematics May 1, 215, TRIP Annual Meeting G. Huang and W. W. Symes
Registration-guided least-squares waveform inversion
 Registration-guided least-squares waveform inversion Hyoungsu Baek 1, Henri Calandra, Laurent Demanet 1 1 MIT Mathematics department, TOTAL S.A. January 15 013 Abstract Full waveform inversion with frequency
Registration-guided least-squares waveform inversion Hyoungsu Baek 1, Henri Calandra, Laurent Demanet 1 1 MIT Mathematics department, TOTAL S.A. January 15 013 Abstract Full waveform inversion with frequency
RANDOM PROPERTIES BENOIT PAUSADER
 RANDOM PROPERTIES BENOIT PAUSADER. Quasilinear problems In general, one consider the following trichotomy for nonlinear PDEs: A semilinear problem is a problem where the highest-order terms appears linearly
RANDOM PROPERTIES BENOIT PAUSADER. Quasilinear problems In general, one consider the following trichotomy for nonlinear PDEs: A semilinear problem is a problem where the highest-order terms appears linearly
Fast convergent finite difference solvers for the elliptic Monge-Ampère equation
 Fast convergent finite difference solvers for the elliptic Monge-Ampère equation Adam Oberman Simon Fraser University BIRS February 17, 211 Joint work [O.] 28. Convergent scheme in two dim. Explicit solver.
Fast convergent finite difference solvers for the elliptic Monge-Ampère equation Adam Oberman Simon Fraser University BIRS February 17, 211 Joint work [O.] 28. Convergent scheme in two dim. Explicit solver.
A Survey of Computational High Frequency Wave Propagation II. Olof Runborg NADA, KTH
 A Survey of Computational High Frequency Wave Propagation II Olof Runborg NADA, KTH High Frequency Wave Propagation CSCAMM, September 19-22, 2005 Numerical methods Direct methods Wave equation (time domain)
A Survey of Computational High Frequency Wave Propagation II Olof Runborg NADA, KTH High Frequency Wave Propagation CSCAMM, September 19-22, 2005 Numerical methods Direct methods Wave equation (time domain)
Optimal Transportation. Nonlinear Partial Differential Equations
 Optimal Transportation and Nonlinear Partial Differential Equations Neil S. Trudinger Centre of Mathematics and its Applications Australian National University 26th Brazilian Mathematical Colloquium 2007
Optimal Transportation and Nonlinear Partial Differential Equations Neil S. Trudinger Centre of Mathematics and its Applications Australian National University 26th Brazilian Mathematical Colloquium 2007
A Narrow-Stencil Finite Difference Method for Hamilton-Jacobi-Bellman Equations
 A Narrow-Stencil Finite Difference Method for Hamilton-Jacobi-Bellman Equations Xiaobing Feng Department of Mathematics The University of Tennessee, Knoxville, U.S.A. Linz, November 23, 2016 Collaborators
A Narrow-Stencil Finite Difference Method for Hamilton-Jacobi-Bellman Equations Xiaobing Feng Department of Mathematics The University of Tennessee, Knoxville, U.S.A. Linz, November 23, 2016 Collaborators
A VARIATIONAL METHOD FOR THE ANALYSIS OF A MONOTONE SCHEME FOR THE MONGE-AMPÈRE EQUATION 1. INTRODUCTION
 A VARIATIONAL METHOD FOR THE ANALYSIS OF A MONOTONE SCHEME FOR THE MONGE-AMPÈRE EQUATION GERARD AWANOU AND LEOPOLD MATAMBA MESSI ABSTRACT. We give a proof of existence of a solution to the discrete problem
A VARIATIONAL METHOD FOR THE ANALYSIS OF A MONOTONE SCHEME FOR THE MONGE-AMPÈRE EQUATION GERARD AWANOU AND LEOPOLD MATAMBA MESSI ABSTRACT. We give a proof of existence of a solution to the discrete problem
Nishant Gurnani. GAN Reading Group. April 14th, / 107
 Nishant Gurnani GAN Reading Group April 14th, 2017 1 / 107 Why are these Papers Important? 2 / 107 Why are these Papers Important? Recently a large number of GAN frameworks have been proposed - BGAN, LSGAN,
Nishant Gurnani GAN Reading Group April 14th, 2017 1 / 107 Why are these Papers Important? 2 / 107 Why are these Papers Important? Recently a large number of GAN frameworks have been proposed - BGAN, LSGAN,
Overview Avoiding Cycle Skipping: Model Extension MSWI: Space-time Extension Numerical Examples
 Overview Avoiding Cycle Skipping: Model Extension MSWI: Space-time Extension Numerical Examples Guanghui Huang Education University of Chinese Academy of Sciences, Beijing, China Ph.D. in Computational
Overview Avoiding Cycle Skipping: Model Extension MSWI: Space-time Extension Numerical Examples Guanghui Huang Education University of Chinese Academy of Sciences, Beijing, China Ph.D. in Computational
Filtered scheme and error estimate for first order Hamilton-Jacobi equations
 and error estimate for first order Hamilton-Jacobi equations Olivier Bokanowski 1 Maurizio Falcone 2 2 1 Laboratoire Jacques-Louis Lions, Université Paris-Diderot (Paris 7) 2 SAPIENZA - Università di Roma
and error estimate for first order Hamilton-Jacobi equations Olivier Bokanowski 1 Maurizio Falcone 2 2 1 Laboratoire Jacques-Louis Lions, Université Paris-Diderot (Paris 7) 2 SAPIENZA - Università di Roma
Optimal Transport: A Crash Course
 Optimal Transport: A Crash Course Soheil Kolouri and Gustavo K. Rohde HRL Laboratories, University of Virginia Introduction What is Optimal Transport? The optimal transport problem seeks the most efficient
Optimal Transport: A Crash Course Soheil Kolouri and Gustavo K. Rohde HRL Laboratories, University of Virginia Introduction What is Optimal Transport? The optimal transport problem seeks the most efficient
Source estimation for frequency-domain FWI with robust penalties
 Source estimation for frequency-domain FWI with robust penalties Aleksandr Y. Aravkin, Tristan van Leeuwen, Henri Calandra, and Felix J. Herrmann Dept. of Earth and Ocean sciences University of British
Source estimation for frequency-domain FWI with robust penalties Aleksandr Y. Aravkin, Tristan van Leeuwen, Henri Calandra, and Felix J. Herrmann Dept. of Earth and Ocean sciences University of British
Numerical Solutions of Geometric Partial Differential Equations. Adam Oberman McGill University
 Numerical Solutions of Geometric Partial Differential Equations Adam Oberman McGill University Sample Equations and Schemes Fully Nonlinear Pucci Equation! "#+ "#* "#) "#( "#$ "#' "#& "#% "#! "!!!"#$ "
Numerical Solutions of Geometric Partial Differential Equations Adam Oberman McGill University Sample Equations and Schemes Fully Nonlinear Pucci Equation! "#+ "#* "#) "#( "#$ "#' "#& "#% "#! "!!!"#$ "
The semi-geostrophic equations - a model for large-scale atmospheric flows
 The semi-geostrophic equations - a model for large-scale atmospheric flows Beatrice Pelloni, University of Reading with M. Cullen (Met Office), D. Gilbert, T. Kuna INI - MFE Dec 2013 Introduction - Motivation
The semi-geostrophic equations - a model for large-scale atmospheric flows Beatrice Pelloni, University of Reading with M. Cullen (Met Office), D. Gilbert, T. Kuna INI - MFE Dec 2013 Introduction - Motivation
A projected Hessian for full waveform inversion
 CWP-679 A projected Hessian for full waveform inversion Yong Ma & Dave Hale Center for Wave Phenomena, Colorado School of Mines, Golden, CO 80401, USA (c) Figure 1. Update directions for one iteration
CWP-679 A projected Hessian for full waveform inversion Yong Ma & Dave Hale Center for Wave Phenomena, Colorado School of Mines, Golden, CO 80401, USA (c) Figure 1. Update directions for one iteration
Nonlinear seismic imaging via reduced order model backprojection
 Nonlinear seismic imaging via reduced order model backprojection Alexander V. Mamonov, Vladimir Druskin 2 and Mikhail Zaslavsky 2 University of Houston, 2 Schlumberger-Doll Research Center Mamonov, Druskin,
Nonlinear seismic imaging via reduced order model backprojection Alexander V. Mamonov, Vladimir Druskin 2 and Mikhail Zaslavsky 2 University of Houston, 2 Schlumberger-Doll Research Center Mamonov, Druskin,
softened probabilistic
 Justin Solomon MIT Understand geometry from a softened probabilistic standpoint. Somewhere over here. Exactly here. One of these two places. Query 1 2 Which is closer, 1 or 2? Query 1 2 Which is closer,
Justin Solomon MIT Understand geometry from a softened probabilistic standpoint. Somewhere over here. Exactly here. One of these two places. Query 1 2 Which is closer, 1 or 2? Query 1 2 Which is closer,
Class Meeting # 1: Introduction to PDEs
 MATH 18.152 COURSE NOTES - CLASS MEETING # 1 18.152 Introduction to PDEs, Spring 2017 Professor: Jared Speck Class Meeting # 1: Introduction to PDEs 1. What is a PDE? We will be studying functions u =
MATH 18.152 COURSE NOTES - CLASS MEETING # 1 18.152 Introduction to PDEs, Spring 2017 Professor: Jared Speck Class Meeting # 1: Introduction to PDEs 1. What is a PDE? We will be studying functions u =
Elements of linear algebra
 Elements of linear algebra Elements of linear algebra A vector space S is a set (numbers, vectors, functions) which has addition and scalar multiplication defined, so that the linear combination c 1 v
Elements of linear algebra Elements of linear algebra A vector space S is a set (numbers, vectors, functions) which has addition and scalar multiplication defined, so that the linear combination c 1 v
arxiv: v2 [math.na] 2 Aug 2013
![arxiv: v2 [math.na] 2 Aug 2013](/thumbs/88/116037620.jpg "arxiv: v2 [math.na] 2 Aug 2013") A VISCOSITY SOLUTION APPROACH TO THE MONGE-AMPÈRE FORMULATION OF THE OPTIMAL TRANSPORTATION PROBLEM arxiv:1208.4873v2 [math.na] 2 Aug 2013 JEAN-DAVID BENAMOU, BRITTANY D. FROESE, AND ADAM M. OBERMAN Abstract.
A VISCOSITY SOLUTION APPROACH TO THE MONGE-AMPÈRE FORMULATION OF THE OPTIMAL TRANSPORTATION PROBLEM arxiv:1208.4873v2 [math.na] 2 Aug 2013 JEAN-DAVID BENAMOU, BRITTANY D. FROESE, AND ADAM M. OBERMAN Abstract.
Vector Derivatives and the Gradient
 ECE 275AB Lecture 10 Fall 2008 V1.1 c K. Kreutz-Delgado, UC San Diego p. 1/1 Lecture 10 ECE 275A Vector Derivatives and the Gradient ECE 275AB Lecture 10 Fall 2008 V1.1 c K. Kreutz-Delgado, UC San Diego
ECE 275AB Lecture 10 Fall 2008 V1.1 c K. Kreutz-Delgado, UC San Diego p. 1/1 Lecture 10 ECE 275A Vector Derivatives and the Gradient ECE 275AB Lecture 10 Fall 2008 V1.1 c K. Kreutz-Delgado, UC San Diego
Wavefield Reconstruction Inversion (WRI) a new take on wave-equation based inversion Felix J. Herrmann
 a new take on wave-equation based inversion Felix J. Herrmann") Wavefield Reconstruction Inversion (WRI) a new take on wave-equation based inversion Felix J. Herrmann SLIM University of British Columbia van Leeuwen, T and Herrmann, F J (2013). Mitigating local minima
Wavefield Reconstruction Inversion (WRI) a new take on wave-equation based inversion Felix J. Herrmann SLIM University of British Columbia van Leeuwen, T and Herrmann, F J (2013). Mitigating local minima
Brittany D. Froese. Contact Information
 Brittany D. Froese Contact Information RLM 11.164 Department of Mathematics The University of Texas at Austin Phone: (512) xxx-xxxx E-mail: bfroese@math.utexas.edu Web: www.ma.utexas.edu/users/bfroese
Brittany D. Froese Contact Information RLM 11.164 Department of Mathematics The University of Texas at Austin Phone: (512) xxx-xxxx E-mail: bfroese@math.utexas.edu Web: www.ma.utexas.edu/users/bfroese
The X-ray transform for a non-abelian connection in two dimensions
 The X-ray transform for a non-abelian connection in two dimensions David Finch Department of Mathematics Oregon State University Corvallis, OR, 97331, USA Gunther Uhlmann Department of Mathematics University
The X-ray transform for a non-abelian connection in two dimensions David Finch Department of Mathematics Oregon State University Corvallis, OR, 97331, USA Gunther Uhlmann Department of Mathematics University
FWI with Compressive Updates Aleksandr Aravkin, Felix Herrmann, Tristan van Leeuwen, Xiang Li, James Burke
 Consortium 2010 FWI with Compressive Updates Aleksandr Aravkin, Felix Herrmann, Tristan van Leeuwen, Xiang Li, James Burke SLIM University of British Columbia Full Waveform Inversion The Full Waveform
Consortium 2010 FWI with Compressive Updates Aleksandr Aravkin, Felix Herrmann, Tristan van Leeuwen, Xiang Li, James Burke SLIM University of British Columbia Full Waveform Inversion The Full Waveform
PARTIAL REGULARITY OF BRENIER SOLUTIONS OF THE MONGE-AMPÈRE EQUATION
 PARTIAL REGULARITY OF BRENIER SOLUTIONS OF THE MONGE-AMPÈRE EQUATION ALESSIO FIGALLI AND YOUNG-HEON KIM Abstract. Given Ω, Λ R n two bounded open sets, and f and g two probability densities concentrated
PARTIAL REGULARITY OF BRENIER SOLUTIONS OF THE MONGE-AMPÈRE EQUATION ALESSIO FIGALLI AND YOUNG-HEON KIM Abstract. Given Ω, Λ R n two bounded open sets, and f and g two probability densities concentrated
An Inexact Newton Method for Nonlinear Constrained Optimization
 An Inexact Newton Method for Nonlinear Constrained Optimization Frank E. Curtis Numerical Analysis Seminar, January 23, 2009 Outline Motivation and background Algorithm development and theoretical results
An Inexact Newton Method for Nonlinear Constrained Optimization Frank E. Curtis Numerical Analysis Seminar, January 23, 2009 Outline Motivation and background Algorithm development and theoretical results
1.2 Derivation. d p f = d p f(x(p)) = x fd p x (= f x x p ). (1) Second, g x x p + g p = 0. d p f = f x g 1. The expression f x gx
) = x fd p x (= f x x p ). (1) Second, g x x p + g p = 0. d p f = f x g 1. The expression f x gx") PDE-constrained optimization and the adjoint method Andrew M. Bradley November 16, 21 PDE-constrained optimization and the adjoint method for solving these and related problems appear in a wide range of
PDE-constrained optimization and the adjoint method Andrew M. Bradley November 16, 21 PDE-constrained optimization and the adjoint method for solving these and related problems appear in a wide range of
In English, this means that if we travel on a straight line between any two points in C, then we never leave C.
 Convex sets In this section, we will be introduced to some of the mathematical fundamentals of convex sets. In order to motivate some of the definitions, we will look at the closest point problem from
Convex sets In this section, we will be introduced to some of the mathematical fundamentals of convex sets. In order to motivate some of the definitions, we will look at the closest point problem from
Computing High Frequency Waves By the Level Set Method
 Computing High Frequency Waves By the Level Set Method Hailiang Liu Department of Mathematics Iowa State University Collaborators: Li-Tien Cheng (UCSD), Stanley Osher (UCLA) Shi Jin (UW-Madison), Richard
Computing High Frequency Waves By the Level Set Method Hailiang Liu Department of Mathematics Iowa State University Collaborators: Li-Tien Cheng (UCSD), Stanley Osher (UCLA) Shi Jin (UW-Madison), Richard
VISCOSITY SOLUTIONS. We follow Han and Lin, Elliptic Partial Differential Equations, 5.
 VISCOSITY SOLUTIONS PETER HINTZ We follow Han and Lin, Elliptic Partial Differential Equations, 5. 1. Motivation Throughout, we will assume that Ω R n is a bounded and connected domain and that a ij C(Ω)
VISCOSITY SOLUTIONS PETER HINTZ We follow Han and Lin, Elliptic Partial Differential Equations, 5. 1. Motivation Throughout, we will assume that Ω R n is a bounded and connected domain and that a ij C(Ω)
Youzuo Lin and Lianjie Huang
 PROCEEDINGS, Thirty-Ninth Workshop on Geothermal Reservoir Engineering Stanford University, Stanford, California, February 24-26, 2014 SGP-TR-202 Building Subsurface Velocity Models with Sharp Interfaces
PROCEEDINGS, Thirty-Ninth Workshop on Geothermal Reservoir Engineering Stanford University, Stanford, California, February 24-26, 2014 SGP-TR-202 Building Subsurface Velocity Models with Sharp Interfaces
A new Hellinger-Kantorovich distance between positive measures and optimal Entropy-Transport problems
 A new Hellinger-Kantorovich distance between positive measures and optimal Entropy-Transport problems Giuseppe Savaré http://www.imati.cnr.it/ savare Dipartimento di Matematica, Università di Pavia Nonlocal
A new Hellinger-Kantorovich distance between positive measures and optimal Entropy-Transport problems Giuseppe Savaré http://www.imati.cnr.it/ savare Dipartimento di Matematica, Università di Pavia Nonlocal
Motion Estimation (I) Ce Liu Microsoft Research New England
 Ce Liu Microsoft Research New England") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
CONVERGENCE THEORY. G. ALLAIRE CMAP, Ecole Polytechnique. 1. Maximum principle. 2. Oscillating test function. 3. Two-scale convergence
 1 CONVERGENCE THEOR G. ALLAIRE CMAP, Ecole Polytechnique 1. Maximum principle 2. Oscillating test function 3. Two-scale convergence 4. Application to homogenization 5. General theory H-convergence) 6.
1 CONVERGENCE THEOR G. ALLAIRE CMAP, Ecole Polytechnique 1. Maximum principle 2. Oscillating test function 3. Two-scale convergence 4. Application to homogenization 5. General theory H-convergence) 6.
2 (Bonus). Let A X consist of points (x, y) such that either x or y is a rational number. Is A measurable? What is its Lebesgue measure?
. Let A X consist of points (x, y) such that either x or y is a rational number. Is A measurable? What is its Lebesgue measure?") MA 645-4A (Real Analysis), Dr. Chernov Homework assignment 1 (Due 9/5). Prove that every countable set A is measurable and µ(a) = 0. 2 (Bonus). Let A consist of points (x, y) such that either x or y is
MA 645-4A (Real Analysis), Dr. Chernov Homework assignment 1 (Due 9/5). Prove that every countable set A is measurable and µ(a) = 0. 2 (Bonus). Let A consist of points (x, y) such that either x or y is
Algorithms for Nonsmooth Optimization
 Algorithms for Nonsmooth Optimization Frank E. Curtis, Lehigh University presented at Center for Optimization and Statistical Learning, Northwestern University 2 March 2018 Algorithms for Nonsmooth Optimization
Algorithms for Nonsmooth Optimization Frank E. Curtis, Lehigh University presented at Center for Optimization and Statistical Learning, Northwestern University 2 March 2018 Algorithms for Nonsmooth Optimization
On second order sufficient optimality conditions for quasilinear elliptic boundary control problems
 On second order sufficient optimality conditions for quasilinear elliptic boundary control problems Vili Dhamo Technische Universität Berlin Joint work with Eduardo Casas Workshop on PDE Constrained Optimization
On second order sufficient optimality conditions for quasilinear elliptic boundary control problems Vili Dhamo Technische Universität Berlin Joint work with Eduardo Casas Workshop on PDE Constrained Optimization
Lecture No 1 Introduction to Diffusion equations The heat equat
 Lecture No 1 Introduction to Diffusion equations The heat equation Columbia University IAS summer program June, 2009 Outline of the lectures We will discuss some basic models of diffusion equations and
Lecture No 1 Introduction to Diffusion equations The heat equation Columbia University IAS summer program June, 2009 Outline of the lectures We will discuss some basic models of diffusion equations and
THE INVERSE FUNCTION THEOREM
 THE INVERSE FUNCTION THEOREM W. PATRICK HOOPER The implicit function theorem is the following result: Theorem 1. Let f be a C 1 function from a neighborhood of a point a R n into R n. Suppose A = Df(a)
THE INVERSE FUNCTION THEOREM W. PATRICK HOOPER The implicit function theorem is the following result: Theorem 1. Let f be a C 1 function from a neighborhood of a point a R n into R n. Suppose A = Df(a)
for all subintervals I J. If the same is true for the dyadic subintervals I D J only, we will write ϕ BMO d (J). In fact, the following is true
. In fact, the following is true") 3 ohn Nirenberg inequality, Part I A function ϕ L () belongs to the space BMO() if sup ϕ(s) ϕ I I I < for all subintervals I If the same is true for the dyadic subintervals I D only, we will write ϕ BMO
3 ohn Nirenberg inequality, Part I A function ϕ L () belongs to the space BMO() if sup ϕ(s) ϕ I I I < for all subintervals I If the same is true for the dyadic subintervals I D only, we will write ϕ BMO
LECTURES ON MEAN FIELD GAMES: II. CALCULUS OVER WASSERSTEIN SPACE, CONTROL OF MCKEAN-VLASOV DYNAMICS, AND THE MASTER EQUATION
 LECTURES ON MEAN FIELD GAMES: II. CALCULUS OVER WASSERSTEIN SPACE, CONTROL OF MCKEAN-VLASOV DYNAMICS, AND THE MASTER EQUATION René Carmona Department of Operations Research & Financial Engineering PACM
LECTURES ON MEAN FIELD GAMES: II. CALCULUS OVER WASSERSTEIN SPACE, CONTROL OF MCKEAN-VLASOV DYNAMICS, AND THE MASTER EQUATION René Carmona Department of Operations Research & Financial Engineering PACM
Discrete transport problems and the concavity of entropy
 Discrete transport problems and the concavity of entropy Bristol Probability and Statistics Seminar, March 2014 Funded by EPSRC Information Geometry of Graphs EP/I009450/1 Paper arxiv:1303.3381 Motivating
Discrete transport problems and the concavity of entropy Bristol Probability and Statistics Seminar, March 2014 Funded by EPSRC Information Geometry of Graphs EP/I009450/1 Paper arxiv:1303.3381 Motivating
Cubic regularization of Newton s method for convex problems with constraints
 CORE DISCUSSION PAPER 006/39 Cubic regularization of Newton s method for convex problems with constraints Yu. Nesterov March 31, 006 Abstract In this paper we derive efficiency estimates of the regularized
CORE DISCUSSION PAPER 006/39 Cubic regularization of Newton s method for convex problems with constraints Yu. Nesterov March 31, 006 Abstract In this paper we derive efficiency estimates of the regularized
Dynamic and Stochastic Brenier Transport via Hopf-Lax formulae on Was
 Dynamic and Stochastic Brenier Transport via Hopf-Lax formulae on Wasserstein Space With many discussions with Yann Brenier and Wilfrid Gangbo Brenierfest, IHP, January 9-13, 2017 ain points of the
Dynamic and Stochastic Brenier Transport via Hopf-Lax formulae on Wasserstein Space With many discussions with Yann Brenier and Wilfrid Gangbo Brenierfest, IHP, January 9-13, 2017 ain points of the
Partial Differential Equations
 Part II Partial Differential Equations Year 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2015 Paper 4, Section II 29E Partial Differential Equations 72 (a) Show that the Cauchy problem for u(x,
Part II Partial Differential Equations Year 2015 2014 2013 2012 2011 2010 2009 2008 2007 2006 2005 2015 Paper 4, Section II 29E Partial Differential Equations 72 (a) Show that the Cauchy problem for u(x,
Gradient Flows: Qualitative Properties & Numerical Schemes
 Gradient Flows: Qualitative Properties & Numerical Schemes J. A. Carrillo Imperial College London RICAM, December 2014 Outline 1 Gradient Flows Models Gradient flows Evolving diffeomorphisms 2 Numerical
Gradient Flows: Qualitative Properties & Numerical Schemes J. A. Carrillo Imperial College London RICAM, December 2014 Outline 1 Gradient Flows Models Gradient flows Evolving diffeomorphisms 2 Numerical
Motion Estimation (I)
") Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
Motion Estimation (I) Ce Liu celiu@microsoft.com Microsoft Research New England We live in a moving world Perceiving, understanding and predicting motion is an important part of our daily lives Motion
1 Newton s Method. Suppose we want to solve: x R. At x = x, f (x) can be approximated by:
 can be approximated by:") Newton s Method Suppose we want to solve: (P:) min f (x) At x = x, f (x) can be approximated by: n x R. f (x) h(x) := f ( x)+ f ( x) T (x x)+ (x x) t H ( x)(x x), 2 which is the quadratic Taylor expansion
Newton s Method Suppose we want to solve: (P:) min f (x) At x = x, f (x) can be approximated by: n x R. f (x) h(x) := f ( x)+ f ( x) T (x x)+ (x x) t H ( x)(x x), 2 which is the quadratic Taylor expansion
POD for Parametric PDEs and for Optimality Systems
 POD for Parametric PDEs and for Optimality Systems M. Kahlbacher, K. Kunisch, H. Müller and S. Volkwein Institute for Mathematics and Scientific Computing University of Graz, Austria DMV-Jahrestagung 26,
POD for Parametric PDEs and for Optimality Systems M. Kahlbacher, K. Kunisch, H. Müller and S. Volkwein Institute for Mathematics and Scientific Computing University of Graz, Austria DMV-Jahrestagung 26,
Investigating the Influence of Box-Constraints on the Solution of a Total Variation Model via an Efficient Primal-Dual Method
 Article Investigating the Influence of Box-Constraints on the Solution of a Total Variation Model via an Efficient Primal-Dual Method Andreas Langer Department of Mathematics, University of Stuttgart,
Article Investigating the Influence of Box-Constraints on the Solution of a Total Variation Model via an Efficient Primal-Dual Method Andreas Langer Department of Mathematics, University of Stuttgart,
Introduction to Aspects of Multiscale Modeling as Applied to Porous Media
 Introduction to Aspects of Multiscale Modeling as Applied to Porous Media Part III Todd Arbogast Department of Mathematics and Center for Subsurface Modeling, Institute for Computational Engineering and
Introduction to Aspects of Multiscale Modeling as Applied to Porous Media Part III Todd Arbogast Department of Mathematics and Center for Subsurface Modeling, Institute for Computational Engineering and
ARE211, Fall 2005 CONTENTS. 5. Characteristics of Functions Surjective, Injective and Bijective functions. 5.2.
 ARE211, Fall 2005 LECTURE #18: THU, NOV 3, 2005 PRINT DATE: NOVEMBER 22, 2005 (COMPSTAT2) CONTENTS 5. Characteristics of Functions. 1 5.1. Surjective, Injective and Bijective functions 1 5.2. Homotheticity
ARE211, Fall 2005 LECTURE #18: THU, NOV 3, 2005 PRINT DATE: NOVEMBER 22, 2005 (COMPSTAT2) CONTENTS 5. Characteristics of Functions. 1 5.1. Surjective, Injective and Bijective functions 1 5.2. Homotheticity
LECTURE # 0 BASIC NOTATIONS AND CONCEPTS IN THE THEORY OF PARTIAL DIFFERENTIAL EQUATIONS (PDES)
") LECTURE # 0 BASIC NOTATIONS AND CONCEPTS IN THE THEORY OF PARTIAL DIFFERENTIAL EQUATIONS (PDES) RAYTCHO LAZAROV 1 Notations and Basic Functional Spaces Scalar function in R d, d 1 will be denoted by u,
LECTURE # 0 BASIC NOTATIONS AND CONCEPTS IN THE THEORY OF PARTIAL DIFFERENTIAL EQUATIONS (PDES) RAYTCHO LAZAROV 1 Notations and Basic Functional Spaces Scalar function in R d, d 1 will be denoted by u,
Bounded uniformly continuous functions
 Bounded uniformly continuous functions Objectives. To study the basic properties of the C -algebra of the bounded uniformly continuous functions on some metric space. Requirements. Basic concepts of analysis:
Bounded uniformly continuous functions Objectives. To study the basic properties of the C -algebra of the bounded uniformly continuous functions on some metric space. Requirements. Basic concepts of analysis:
Second Order Elliptic PDE
 Second Order Elliptic PDE T. Muthukumar tmk@iitk.ac.in December 16, 2014 Contents 1 A Quick Introduction to PDE 1 2 Classification of Second Order PDE 3 3 Linear Second Order Elliptic Operators 4 4 Periodic
Second Order Elliptic PDE T. Muthukumar tmk@iitk.ac.in December 16, 2014 Contents 1 A Quick Introduction to PDE 1 2 Classification of Second Order PDE 3 3 Linear Second Order Elliptic Operators 4 4 Periodic
Blowup dynamics of an unstable thin-film equation
 Blowup dynamics of an unstable thin-film equation IMA Summer Program Geometrical Singularities and Singular Geometries July 15, 2008. (IMA, July 15, 2008.) 1 / 12 Thin-film equations (TFE) u t = (u n u
Blowup dynamics of an unstable thin-film equation IMA Summer Program Geometrical Singularities and Singular Geometries July 15, 2008. (IMA, July 15, 2008.) 1 / 12 Thin-film equations (TFE) u t = (u n u
Optimal control problems with PDE constraints
 Optimal control problems with PDE constraints Maya Neytcheva CIM, October 2017 General framework Unconstrained optimization problems min f (q) q x R n (real vector) and f : R n R is a smooth function.
Optimal control problems with PDE constraints Maya Neytcheva CIM, October 2017 General framework Unconstrained optimization problems min f (q) q x R n (real vector) and f : R n R is a smooth function.
Robust Optimization for Risk Control in Enterprise-wide Optimization
 Robust Optimization for Risk Control in Enterprise-wide Optimization Juan Pablo Vielma Department of Industrial Engineering University of Pittsburgh EWO Seminar, 011 Pittsburgh, PA Uncertainty in Optimization
Robust Optimization for Risk Control in Enterprise-wide Optimization Juan Pablo Vielma Department of Industrial Engineering University of Pittsburgh EWO Seminar, 011 Pittsburgh, PA Uncertainty in Optimization
GERARD AWANOU. i 1< <i k
 ITERATIVE METHODS FOR k-hessian EQUATIONS GERARD AWANOU Abstract. On a domain of the n-dimensional Euclidean space, and for an integer k = 1,..., n, the k-hessian equations are fully nonlinear elliptic
ITERATIVE METHODS FOR k-hessian EQUATIONS GERARD AWANOU Abstract. On a domain of the n-dimensional Euclidean space, and for an integer k = 1,..., n, the k-hessian equations are fully nonlinear elliptic
A few words about the MTW tensor
 A few words about the Ma-Trudinger-Wang tensor Université Nice - Sophia Antipolis & Institut Universitaire de France Salah Baouendi Memorial Conference (Tunis, March 2014) The Ma-Trudinger-Wang tensor
A few words about the Ma-Trudinger-Wang tensor Université Nice - Sophia Antipolis & Institut Universitaire de France Salah Baouendi Memorial Conference (Tunis, March 2014) The Ma-Trudinger-Wang tensor
Recent developments in elliptic partial differential equations of Monge Ampère type
 Recent developments in elliptic partial differential equations of Monge Ampère type Neil S. Trudinger Abstract. In conjunction with applications to optimal transportation and conformal geometry, there
Recent developments in elliptic partial differential equations of Monge Ampère type Neil S. Trudinger Abstract. In conjunction with applications to optimal transportation and conformal geometry, there
Stability of optimization problems with stochastic dominance constraints
 Stability of optimization problems with stochastic dominance constraints D. Dentcheva and W. Römisch Stevens Institute of Technology, Hoboken Humboldt-University Berlin www.math.hu-berlin.de/~romisch SIAM
Stability of optimization problems with stochastic dominance constraints D. Dentcheva and W. Römisch Stevens Institute of Technology, Hoboken Humboldt-University Berlin www.math.hu-berlin.de/~romisch SIAM
On the approximation of the principal eigenvalue for a class of nonlinear elliptic operators
 On the approximation of the principal eigenvalue for a class of nonlinear elliptic operators Fabio Camilli ("Sapienza" Università di Roma) joint work with I.Birindelli ("Sapienza") I.Capuzzo Dolcetta ("Sapienza")
On the approximation of the principal eigenvalue for a class of nonlinear elliptic operators Fabio Camilli ("Sapienza" Università di Roma) joint work with I.Birindelli ("Sapienza") I.Capuzzo Dolcetta ("Sapienza")
Lecture Introduction
 Lecture 1 1.1 Introduction The theory of Partial Differential Equations (PDEs) is central to mathematics, both pure and applied. The main difference between the theory of PDEs and the theory of Ordinary
Lecture 1 1.1 Introduction The theory of Partial Differential Equations (PDEs) is central to mathematics, both pure and applied. The main difference between the theory of PDEs and the theory of Ordinary
3 (Due ). Let A X consist of points (x, y) such that either x or y is a rational number. Is A measurable? What is its Lebesgue measure?
. Let A X consist of points (x, y) such that either x or y is a rational number. Is A measurable? What is its Lebesgue measure?") MA 645-4A (Real Analysis), Dr. Chernov Homework assignment 1 (Due ). Show that the open disk x 2 + y 2 < 1 is a countable union of planar elementary sets. Show that the closed disk x 2 + y 2 1 is a countable
MA 645-4A (Real Analysis), Dr. Chernov Homework assignment 1 (Due ). Show that the open disk x 2 + y 2 < 1 is a countable union of planar elementary sets. Show that the closed disk x 2 + y 2 1 is a countable
NONTRIVIAL SOLUTIONS TO INTEGRAL AND DIFFERENTIAL EQUATIONS
 Fixed Point Theory, Volume 9, No. 1, 28, 3-16 http://www.math.ubbcluj.ro/ nodeacj/sfptcj.html NONTRIVIAL SOLUTIONS TO INTEGRAL AND DIFFERENTIAL EQUATIONS GIOVANNI ANELLO Department of Mathematics University
Fixed Point Theory, Volume 9, No. 1, 28, 3-16 http://www.math.ubbcluj.ro/ nodeacj/sfptcj.html NONTRIVIAL SOLUTIONS TO INTEGRAL AND DIFFERENTIAL EQUATIONS GIOVANNI ANELLO Department of Mathematics University
Variational approach to mean field games with density constraints
 1 / 18 Variational approach to mean field games with density constraints Alpár Richárd Mészáros LMO, Université Paris-Sud (based on ongoing joint works with F. Santambrogio, P. Cardaliaguet and F. J. Silva)
1 / 18 Variational approach to mean field games with density constraints Alpár Richárd Mészáros LMO, Université Paris-Sud (based on ongoing joint works with F. Santambrogio, P. Cardaliaguet and F. J. Silva)
Half of Final Exam Name: Practice Problems October 28, 2014
 Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
Math 54. Treibergs Half of Final Exam Name: Practice Problems October 28, 24 Half of the final will be over material since the last midterm exam, such as the practice problems given here. The other half
1 Non-negative Matrix Factorization (NMF)
") 2018-06-21 1 Non-negative Matrix Factorization NMF) In the last lecture, we considered low rank approximations to data matrices. We started with the optimal rank k approximation to A R m n via the SVD,
2018-06-21 1 Non-negative Matrix Factorization NMF) In the last lecture, we considered low rank approximations to data matrices. We started with the optimal rank k approximation to A R m n via the SVD,
Entropic Schemes for Conservation Laws
 CONSTRUCTVE FUNCTON THEORY, Varna 2002 (B. Bojanov, Ed.), DARBA, Sofia, 2002, pp. 1-6. Entropic Schemes for Conservation Laws Bojan Popov A new class of Godunov-type numerical methods (called here entropic)
CONSTRUCTVE FUNCTON THEORY, Varna 2002 (B. Bojanov, Ed.), DARBA, Sofia, 2002, pp. 1-6. Entropic Schemes for Conservation Laws Bojan Popov A new class of Godunov-type numerical methods (called here entropic)
Dual methods for the minimization of the total variation
 1 / 30 Dual methods for the minimization of the total variation Rémy Abergel supervisor Lionel Moisan MAP5 - CNRS UMR 8145 Different Learning Seminar, LTCI Thursday 21st April 2016 2 / 30 Plan 1 Introduction
1 / 30 Dual methods for the minimization of the total variation Rémy Abergel supervisor Lionel Moisan MAP5 - CNRS UMR 8145 Different Learning Seminar, LTCI Thursday 21st April 2016 2 / 30 Plan 1 Introduction
Bound-state solutions and well-posedness of the dispersion-managed nonlinear Schrödinger and related equations
 Bound-state solutions and well-posedness of the dispersion-managed nonlinear Schrödinger and related equations J. Albert and E. Kahlil University of Oklahoma, Langston University 10th IMACS Conference,
Bound-state solutions and well-posedness of the dispersion-managed nonlinear Schrödinger and related equations J. Albert and E. Kahlil University of Oklahoma, Langston University 10th IMACS Conference,
Unravel Faults on Seismic Migration Images Using Structure-Oriented, Fault-Preserving and Nonlinear Anisotropic Diffusion Filtering
 PROCEEDINGS, 44th Workshop on Geothermal Reservoir Engineering Stanford University, Stanford, California, February 11-13, 2019 SGP-TR-214 Unravel Faults on Seismic Migration Images Using Structure-Oriented,
PROCEEDINGS, 44th Workshop on Geothermal Reservoir Engineering Stanford University, Stanford, California, February 11-13, 2019 SGP-TR-214 Unravel Faults on Seismic Migration Images Using Structure-Oriented,
TD 1: Hilbert Spaces and Applications
 Université Paris-Dauphine Functional Analysis and PDEs Master MMD-MA 2017/2018 Generalities TD 1: Hilbert Spaces and Applications Exercise 1 (Generalized Parallelogram law). Let (H,, ) be a Hilbert space.
Université Paris-Dauphine Functional Analysis and PDEs Master MMD-MA 2017/2018 Generalities TD 1: Hilbert Spaces and Applications Exercise 1 (Generalized Parallelogram law). Let (H,, ) be a Hilbert space.
Some Aspects of Solutions of Partial Differential Equations
 Some Aspects of Solutions of Partial Differential Equations K. Sakthivel Department of Mathematics Indian Institute of Space Science & Technology(IIST) Trivandrum - 695 547, Kerala Sakthivel@iist.ac.in
Some Aspects of Solutions of Partial Differential Equations K. Sakthivel Department of Mathematics Indian Institute of Space Science & Technology(IIST) Trivandrum - 695 547, Kerala Sakthivel@iist.ac.in
ENO and WENO schemes. Further topics and time Integration
 ENO and WENO schemes. Further topics and time Integration Tefa Kaisara CASA Seminar 29 November, 2006 Outline 1 Short review ENO/WENO 2 Further topics Subcell resolution Other building blocks 3 Time Integration
ENO and WENO schemes. Further topics and time Integration Tefa Kaisara CASA Seminar 29 November, 2006 Outline 1 Short review ENO/WENO 2 Further topics Subcell resolution Other building blocks 3 Time Integration
Comparison between least-squares reverse time migration and full-waveform inversion
 Comparison between least-squares reverse time migration and full-waveform inversion Lei Yang, Daniel O. Trad and Wenyong Pan Summary The inverse problem in exploration geophysics usually consists of two
Comparison between least-squares reverse time migration and full-waveform inversion Lei Yang, Daniel O. Trad and Wenyong Pan Summary The inverse problem in exploration geophysics usually consists of two
Numerical Modeling of Methane Hydrate Evolution
 Numerical Modeling of Methane Hydrate Evolution Nathan L. Gibson Joint work with F. P. Medina, M. Peszynska, R. E. Showalter Department of Mathematics SIAM Annual Meeting 2013 Friday, July 12 This work
Numerical Modeling of Methane Hydrate Evolution Nathan L. Gibson Joint work with F. P. Medina, M. Peszynska, R. E. Showalter Department of Mathematics SIAM Annual Meeting 2013 Friday, July 12 This work
Optimal mass transport as a distance measure between images
 Optimal mass transport as a distance measure between images Axel Ringh 1 1 Department of Mathematics, KTH Royal Institute of Technology, Stockholm, Sweden. 21 st of June 2018 INRIA, Sophia-Antipolis, France
Optimal mass transport as a distance measure between images Axel Ringh 1 1 Department of Mathematics, KTH Royal Institute of Technology, Stockholm, Sweden. 21 st of June 2018 INRIA, Sophia-Antipolis, France
Degenerate Monge-Ampère equations and the smoothness of the eigenfunction
 Degenerate Monge-Ampère equations and the smoothness of the eigenfunction Ovidiu Savin Columbia University November 2nd, 2015 Ovidiu Savin (Columbia University) Degenerate Monge-Ampère equations November
Degenerate Monge-Ampère equations and the smoothness of the eigenfunction Ovidiu Savin Columbia University November 2nd, 2015 Ovidiu Savin (Columbia University) Degenerate Monge-Ampère equations November
Microseismic Event Estimation Via Full Waveform Inversion
 Microseismic Event Estimation Via Full Waveform Inversion Susan E. Minkoff 1, Jordan Kaderli 1, Matt McChesney 2, and George McMechan 2 1 Department of Mathematical Sciences, University of Texas at Dallas
Microseismic Event Estimation Via Full Waveform Inversion Susan E. Minkoff 1, Jordan Kaderli 1, Matt McChesney 2, and George McMechan 2 1 Department of Mathematical Sciences, University of Texas at Dallas
Iterative regularization of nonlinear ill-posed problems in Banach space
 Iterative regularization of nonlinear ill-posed problems in Banach space Barbara Kaltenbacher, University of Klagenfurt joint work with Bernd Hofmann, Technical University of Chemnitz, Frank Schöpfer and
Iterative regularization of nonlinear ill-posed problems in Banach space Barbara Kaltenbacher, University of Klagenfurt joint work with Bernd Hofmann, Technical University of Chemnitz, Frank Schöpfer and
Matrix Derivatives and Descent Optimization Methods
 Matrix Derivatives and Descent Optimization Methods 1 Qiang Ning Department of Electrical and Computer Engineering Beckman Institute for Advanced Science and Techonology University of Illinois at Urbana-Champaign
Matrix Derivatives and Descent Optimization Methods 1 Qiang Ning Department of Electrical and Computer Engineering Beckman Institute for Advanced Science and Techonology University of Illinois at Urbana-Champaign
11 a 12 a 21 a 11 a 22 a 12 a 21. (C.11) A = The determinant of a product of two matrices is given by AB = A B 1 1 = (C.13) and similarly.
 A = The determinant of a product of two matrices is given by AB = A B 1 1 = (C.13) and similarly.") C PROPERTIES OF MATRICES 697 to whether the permutation i 1 i 2 i N is even or odd, respectively Note that I =1 Thus, for a 2 2 matrix, the determinant takes the form A = a 11 a 12 = a a 21 a 11 a 22 a
C PROPERTIES OF MATRICES 697 to whether the permutation i 1 i 2 i N is even or odd, respectively Note that I =1 Thus, for a 2 2 matrix, the determinant takes the form A = a 11 a 12 = a a 21 a 11 a 22 a
Uniformly Uniformly-ergodic Markov chains and BSDEs
 Uniformly Uniformly-ergodic Markov chains and BSDEs Samuel N. Cohen Mathematical Institute, University of Oxford (Based on joint work with Ying Hu, Robert Elliott, Lukas Szpruch) Centre Henri Lebesgue,
Uniformly Uniformly-ergodic Markov chains and BSDEs Samuel N. Cohen Mathematical Institute, University of Oxford (Based on joint work with Ying Hu, Robert Elliott, Lukas Szpruch) Centre Henri Lebesgue,
Nonlinear Diffusion. Journal Club Presentation. Xiaowei Zhou
 1 / 41 Journal Club Presentation Xiaowei Zhou Department of Electronic and Computer Engineering The Hong Kong University of Science and Technology 2009-12-11 2 / 41 Outline 1 Motivation Diffusion process
1 / 41 Journal Club Presentation Xiaowei Zhou Department of Electronic and Computer Engineering The Hong Kong University of Science and Technology 2009-12-11 2 / 41 Outline 1 Motivation Diffusion process
On the regularity of solutions of optimal transportation problems
 On the regularity of solutions of optimal transportation problems Grégoire Loeper April 25, 2008 Abstract We give a necessary and sufficient condition on the cost function so that the map solution of Monge
On the regularity of solutions of optimal transportation problems Grégoire Loeper April 25, 2008 Abstract We give a necessary and sufficient condition on the cost function so that the map solution of Monge
Full Waveform Inversion (FWI) with wave-equation migration. Gary Margrave Rob Ferguson Chad Hogan Banff, 3 Dec. 2010
 with wave-equation migration. Gary Margrave Rob Ferguson Chad Hogan Banff, 3 Dec. 2010") Full Waveform Inversion (FWI) with wave-equation migration (WEM) and well control Gary Margrave Rob Ferguson Chad Hogan Banff, 3 Dec. 2010 Outline The FWI cycle The fundamental theorem of FWI Understanding
Full Waveform Inversion (FWI) with wave-equation migration (WEM) and well control Gary Margrave Rob Ferguson Chad Hogan Banff, 3 Dec. 2010 Outline The FWI cycle The fundamental theorem of FWI Understanding
Errata Applied Analysis
 Errata Applied Analysis p. 9: line 2 from the bottom: 2 instead of 2. p. 10: Last sentence should read: The lim sup of a sequence whose terms are bounded from above is finite or, and the lim inf of a sequence
Errata Applied Analysis p. 9: line 2 from the bottom: 2 instead of 2. p. 10: Last sentence should read: The lim sup of a sequence whose terms are bounded from above is finite or, and the lim inf of a sequence
PDEs, part 1: Introduction and elliptic PDEs
 PDEs, part 1: Introduction and elliptic PDEs Anna-Karin Tornberg Mathematical Models, Analysis and Simulation Fall semester, 2013 Partial di erential equations The solution depends on several variables,
PDEs, part 1: Introduction and elliptic PDEs Anna-Karin Tornberg Mathematical Models, Analysis and Simulation Fall semester, 2013 Partial di erential equations The solution depends on several variables,
Transform methods. and its inverse can be used to analyze certain time-dependent PDEs. f(x) sin(sxπ/(n + 1))
 sin(sxπ/(n + 1))") AMSC/CMSC 661 Scientific Computing II Spring 2010 Transforms and Wavelets Dianne P. O Leary c 2005,2010 Some motivations: Transform methods The Fourier transform Fv(ξ) = ˆv(ξ) = v(x)e ix ξ dx, R d and
AMSC/CMSC 661 Scientific Computing II Spring 2010 Transforms and Wavelets Dianne P. O Leary c 2005,2010 Some motivations: Transform methods The Fourier transform Fv(ξ) = ˆv(ξ) = v(x)e ix ξ dx, R d and
Shiqian Ma, MAT-258A: Numerical Optimization 1. Chapter 9. Alternating Direction Method of Multipliers
 Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 9 Alternating Direction Method of Multipliers Shiqian Ma, MAT-258A: Numerical Optimization 2 Separable convex optimization a special case is min f(x)
Shiqian Ma, MAT-258A: Numerical Optimization 1 Chapter 9 Alternating Direction Method of Multipliers Shiqian Ma, MAT-258A: Numerical Optimization 2 Separable convex optimization a special case is min f(x)
Convexity of level sets for solutions to nonlinear elliptic problems in convex rings. Paola Cuoghi and Paolo Salani
 Convexity of level sets for solutions to nonlinear elliptic problems in convex rings Paola Cuoghi and Paolo Salani Dip.to di Matematica U. Dini - Firenze - Italy 1 Let u be a solution of a Dirichlet problem
Convexity of level sets for solutions to nonlinear elliptic problems in convex rings Paola Cuoghi and Paolo Salani Dip.to di Matematica U. Dini - Firenze - Italy 1 Let u be a solution of a Dirichlet problem
Weighted Essentially Non-Oscillatory limiters for Runge-Kutta Discontinuous Galerkin Methods
 Weighted Essentially Non-Oscillatory limiters for Runge-Kutta Discontinuous Galerkin Methods Jianxian Qiu School of Mathematical Science Xiamen University jxqiu@xmu.edu.cn http://ccam.xmu.edu.cn/teacher/jxqiu
Weighted Essentially Non-Oscillatory limiters for Runge-Kutta Discontinuous Galerkin Methods Jianxian Qiu School of Mathematical Science Xiamen University jxqiu@xmu.edu.cn http://ccam.xmu.edu.cn/teacher/jxqiu
Nonlinear acoustic imaging via reduced order model backprojection
 Nonlinear acoustic imaging via reduced order model backprojection Alexander V. Mamonov 1, Vladimir Druskin 2, Andrew Thaler 3 and Mikhail Zaslavsky 2 1 University of Houston, 2 Schlumberger-Doll Research
Nonlinear acoustic imaging via reduced order model backprojection Alexander V. Mamonov 1, Vladimir Druskin 2, Andrew Thaler 3 and Mikhail Zaslavsky 2 1 University of Houston, 2 Schlumberger-Doll Research
z x = f x (x, y, a, b), z y = f y (x, y, a, b). F(x, y, z, z x, z y ) = 0. This is a PDE for the unknown function of two independent variables.
, z y = f y (x, y, a, b). F(x, y, z, z x, z y ) = 0. This is a PDE for the unknown function of two independent variables.") Chapter 2 First order PDE 2.1 How and Why First order PDE appear? 2.1.1 Physical origins Conservation laws form one of the two fundamental parts of any mathematical model of Continuum Mechanics. These
Chapter 2 First order PDE 2.1 How and Why First order PDE appear? 2.1.1 Physical origins Conservation laws form one of the two fundamental parts of any mathematical model of Continuum Mechanics. These
Existence and uniqueness results for the MFG system
 Existence and uniqueness results for the MFG system P. Cardaliaguet Paris-Dauphine Based on Lasry-Lions (2006) and Lions lectures at Collège de France IMA Special Short Course Mean Field Games", November
Existence and uniqueness results for the MFG system P. Cardaliaguet Paris-Dauphine Based on Lasry-Lions (2006) and Lions lectures at Collège de France IMA Special Short Course Mean Field Games", November