Introduction to Model Order Reduction
|
|
|
- Raymond Gibbs
- 6 years ago
- Views:
Transcription

1 KTH ROYAL INSTITUTE OF TECHNOLOGY Introduction to Model Order Reduction Lecture 1: Introduction and overview Henrik Sandberg, Bart Besselink, Madhu N. Belur
2 Overview of Today s Lecture What is model (order) reduction? Why is it important? What is included in the course? What is not included? Preliminary program What is expected from you? How to pass? Sign up for course
3 Model (Order) Reduction ~ hits in Google Many different research communities use different forms of model reduction: Fluid dynamics Mechanics Computational biology Circuit design Control theory Many heuristics available. More or less well-motivated. In early 1980 s some optimal approaches were developed (using AAK-lemma) in control theory. Few rigorous methods known for nonlinear systems.

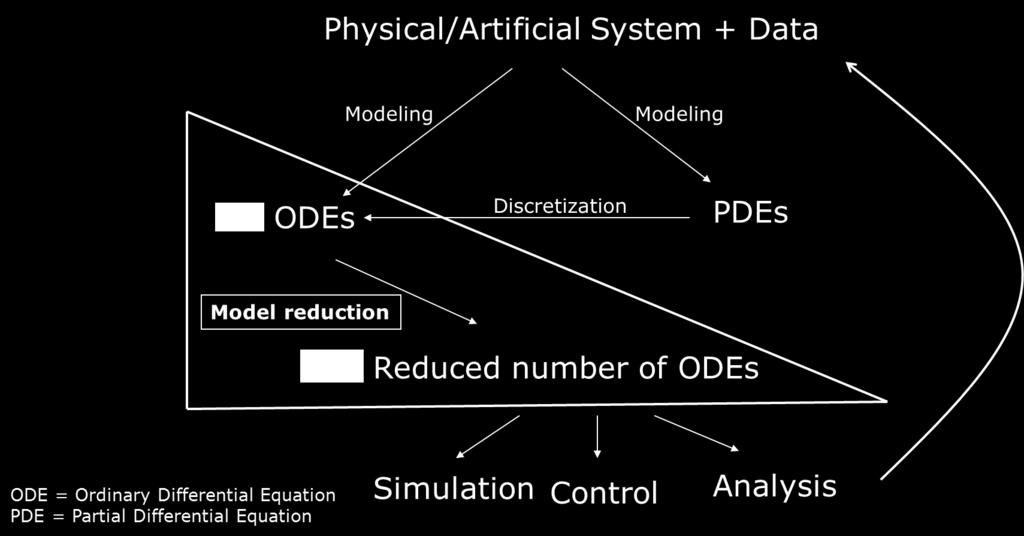
4 The Big Picture
5 An Incomplete Problem Formulation Given an ODE of order n Find another ODE of order r with essentially the same properties. Not enough information for problem to make complete sense, although this captures the essence of the model-orderreduction problem.



6 Problem 1: The standard problem Given: Find: such that is small.
.")
7 Problem 1 (cont d) Choice of input u(t) determines what states are excited. Could also reflect initial conditions x(0). Choice of output y(t) determines what property of the states we want to preserve.
8 Problem 1 (cont d): Trade-off Misfit Reduced order r The trade-off curve determines suitable G r Acceptable misfit Suitable reduced orders Expensive to compute exact curve. Bounds often enough:

9 Problem 1 (cont d) Often the linear problem will be treated:
10 Problem 1 (cont d) A good model-reduction method gives us: 1. bound(r) To help us choose a suitable approximation order r before the reduced-order model has to be computed; and 2. a reduced-order model (f r,g r ) alt. (A r,b r,c r,d r ). Such methods exist for some classes of models (typically linear). Many heuristics fail to provide bound(r). Note: After a reduced-order G r model is found, usually misfit(g,g r ) can be computed (although it may be expensive)
11 Why Decrease the Order? Simulation: Each evaluation of f(x(t),u(t)) is O(n 2 ) operations in linear case. Simulation: Data compression, roughly O(n 2 ) numbers to store a linear model. Control: Computation time of LQG controller is O(n 3 ) operations (solve the Riccati equation). Control: Optimal controller is at least of order n can be hard to implement. Analysis: Curse of dimensionality. Problem complexity often exponential in number of equations (=order).
.")
12 Why Define Misfit This Way? - Misfit is a measure of the worst-case error of the approximation. Can be pessimistic Other measures are possible, statistical for example. Worst-case error often good for control theory (robust control theory). Simple expressions of bound(r) are available for worstcase errors, but not for statistical error measures.
13 Classification of Methods O(n 3 ) operations n ~ 1000 Provable stability, bound(r) exist Focus of course O(r 2 n) operations n ~ 10 6 No provable stability, bound(r) does not exist [Figure from Approximation of Large-Scale Dynamical Systems]

14 Example 1: Image compression
15 Example 2: Chemical Reactions Model reduction of a diesel exhaust catalyst from [Sandberg, 2006].

16 Example 2 (cont d) Reduced-order vs. misfit trade-off
17 Example 2 (cont d) Verification using r=1 and r=2
18 Explanation Kalman decomposition: Only S os contribute to the mapping u(t) y(t). Also, states in S os do not contribute equally. G r = S os is one obvious reduced model candidate, but we can often reduce more with very small misfit!
19 Problem 2: Model Reduction with Structure Constraints States in the model G are physically constrained to certain blocks, for example. Example: G 1 is a plant. G 2 is a controller.
20 Example 3: Networked Control Example from [Sandberg and Murray, 2007]. K is a decentralized controller of P. G models P s interaction with the (large) surrounding environment. G r is a local environment model, to be added to controller K. How to choose G r?
21 Example 3 (cont d) Environment G (solid blue) is a highly resonant system. In open loop, G is hard to reduce. In closed loop, only certain frequencies are important. Reduced models: G 4 (dashed red), G 6 (dashed green).
22 Example 3 (cont d) Upper plot: Load step response with/without G r =G. Lower plot: Load step response with G 4 and G 6. A low-order environment model can compensate for a very complex environment!
23 Explanation Find proper inputs and outputs to each subsystem, which reflect the subsystem s interaction with the global system. Then apply methods that solve Problem 1. Motivation: 1. Low-order feedback/feedforward controllers 2. Large interconnected systems in computer science and biology 3. Modular model reduction
 Study area: Southern Sweden.")
24 Example 4: Power Systems, KTH-Nordic32 system Model info: 52 buses 52 lines 28 transformers 20 generators (12 hydro gen.) Study area: Southern Sweden. Keep this model External area: Simplify as much as possible Example from [Sturk, Vanfretti, Chompoobutrgool, Sandberg, 2012, 2014].
25 Results External area has 246 dynamic states. Reduced external area has 17 dynamic states Evaluation on faulty interconnected system:
26 What You Will Learn in the Course Norms of signals and systems, some Hilbert space theory. Principal Component Analysis (PCA)/Proper Orthogonal Decomposition (POD)/Singular Value Decomposition (SVD). Realization theory: Observability and controllability from optimal control/estimation perspective. Balanced truncation for linear systems (with extension to nonlinear systems). Hankel norm approximation. Uncertainty and robustness analysis of models (small-gain theorem), controller reduction. Optimization/LMI approaches. Behavioral theory (Madhu Belur).
27 Course Basics Graduate level Pass/fail 7 ECTS Course code: FEL3500 Prerequisites: 1. Linear algebra 2. Basic systems theory (state-space models, controllability, observability etc.) 3. Familiarity with MATLAB
28 Course Material Two books entirely devoted to model reduction are available: 1. Obinata and Anderson: Model Reduction for Control Systems Design (online version) 2. Antoulas: Approximation of Large-Scale Dynamical Systems These books are not required for the course (although they are very good). Complete references on webpage. Parts of these control/optimization books are used 1. Luenberger: Optimization by Vector Space Methods 2. Green and Limebeer: Linear Robust Control (online version) 3. Doyle, Francis, and Tannenbaum: Feedback Control Theory (online version)
29 Course Material (cont d) Relevant research articles will be distributed. Generally no slides. White/black board will be used. Minimalistic lecture notes (PDFs) provided every lecture, containing: 1. Summary of most important results (generally without proofs) 2. Exercises 3. Reading advice
30 To Get Credits, You Need to Complete 1. Exercises Exercises handed out with each lecture At the end of the course, at least 75% of the exercises should have been solved and turned in on time Exercises for Lectures 1-4 due April 17 Exercises for Lectures 5-8 due May Exam A 24h take-home exam You decide when to take it, but it should be completed at the latest 3 months after course ends No cooperation allowed Problems similar to exercises
31 Next Lecture Wednesday April 2 at 13:15-15 in L41. We start with the simplest methods: Modal truncation Singular perturbation/residualization Model projection First set of exercises handed out. Model-reduction method complexity increases with time in the course. First exercise session on Friday April 4 is devoted to repetition of basic linear systems concepts, Hilbert spaces, norms, operators, Hope to see you on Wednesday!
Introduction to Model Order Reduction
 Introduction to Model Order Reduction Lecture 1: Introduction and overview Henrik Sandberg Kin Cheong Sou Automatic Control Lab, KTH ACCESS Specialized Course Graduate level Ht 2010, period 1 1 Overview
Introduction to Model Order Reduction Lecture 1: Introduction and overview Henrik Sandberg Kin Cheong Sou Automatic Control Lab, KTH ACCESS Specialized Course Graduate level Ht 2010, period 1 1 Overview
SiMpLIfy: A Toolbox for Structured Model Reduction
 SiMpLIfy: A Toolbox for Structured Model Reduction Martin Biel, Farhad Farokhi, and Henrik Sandberg ACCESS Linnaeus Center, KTH Royal Institute of Technology Department of Electrical and Electronic Engineering,
SiMpLIfy: A Toolbox for Structured Model Reduction Martin Biel, Farhad Farokhi, and Henrik Sandberg ACCESS Linnaeus Center, KTH Royal Institute of Technology Department of Electrical and Electronic Engineering,
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 8: Youla parametrization, LMIs, Model Reduction and Summary [Ch. 11-12] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 8: Youla, LMIs, Model Reduction
FEL3210 Multivariable Feedback Control Lecture 8: Youla parametrization, LMIs, Model Reduction and Summary [Ch. 11-12] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 8: Youla, LMIs, Model Reduction
EL2520 Control Theory and Practice
 EL2520 Control Theory and Practice Lecture 8: Linear quadratic control Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden Linear quadratic control Allows to compute the controller
EL2520 Control Theory and Practice Lecture 8: Linear quadratic control Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden Linear quadratic control Allows to compute the controller
Lecture 12. Upcoming labs: Final Exam on 12/21/2015 (Monday)10:30-12:30
10:30-12:30") 289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
Finite-Time Thermodynamics of Port-Hamiltonian Systems
 Finite-Time Thermodynamics of Port-Hamiltonian Systems Henrik Sandberg Automatic Control Lab, ACCESS Linnaeus Centre, KTH (Currently on sabbatical leave at LIDS, MIT) Jean-Charles Delvenne CORE, UC Louvain
Finite-Time Thermodynamics of Port-Hamiltonian Systems Henrik Sandberg Automatic Control Lab, ACCESS Linnaeus Centre, KTH (Currently on sabbatical leave at LIDS, MIT) Jean-Charles Delvenne CORE, UC Louvain
EL2520 Control Theory and Practice
 So far EL2520 Control Theory and Practice r Fr wu u G w z n Lecture 5: Multivariable systems -Fy Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden SISO control revisited: Signal
So far EL2520 Control Theory and Practice r Fr wu u G w z n Lecture 5: Multivariable systems -Fy Mikael Johansson School of Electrical Engineering KTH, Stockholm, Sweden SISO control revisited: Signal
AE 200 Engineering Analysis and Control of Aerospace Systems
 Instructor Info Credit Class Days / Time Office Location: ENG 272C Office Hours: Monday 4:00pm 6:30pm Email: kamran.turkoglu@sjsu.edu 3 units Tuesday, 6:00pm 8:45pm Classroom CL 222 Prerequisites TA: Contact
Instructor Info Credit Class Days / Time Office Location: ENG 272C Office Hours: Monday 4:00pm 6:30pm Email: kamran.turkoglu@sjsu.edu 3 units Tuesday, 6:00pm 8:45pm Classroom CL 222 Prerequisites TA: Contact
3 Gramians and Balanced Realizations
 3 Gramians and Balanced Realizations In this lecture, we use an optimization approach to find suitable realizations for truncation and singular perturbation of G. It turns out that the recommended realizations
3 Gramians and Balanced Realizations In this lecture, we use an optimization approach to find suitable realizations for truncation and singular perturbation of G. It turns out that the recommended realizations
SF Matrix computations for large-scale systems. Numerical linear algebra for large-scale systems
 SF2524 - Matrix computations for large-scale systems Numerical linear algebra for large-scale systems Intro lecture, October 31, 2017 KTH Royal Institute of Technology Mathematics Dept. - NA division 1/23
SF2524 - Matrix computations for large-scale systems Numerical linear algebra for large-scale systems Intro lecture, October 31, 2017 KTH Royal Institute of Technology Mathematics Dept. - NA division 1/23
Contents. PART I METHODS AND CONCEPTS 2. Transfer Function Approach Frequency Domain Representations... 42
 Contents Preface.............................................. xiii 1. Introduction......................................... 1 1.1 Continuous and Discrete Control Systems................. 4 1.2 Open-Loop
Contents Preface.............................................. xiii 1. Introduction......................................... 1 1.1 Continuous and Discrete Control Systems................. 4 1.2 Open-Loop
Using Model Reduction techniques for simulating the heat transfer in electronic systems.
 Using Model Reduction techniques for simulating the heat transfer in electronic systems. -Pramod Mathai, Dr. Benjamin Shapiro, University of Maryland, College Park Abstract: There is an increasing need
Using Model Reduction techniques for simulating the heat transfer in electronic systems. -Pramod Mathai, Dr. Benjamin Shapiro, University of Maryland, College Park Abstract: There is an increasing need
Dissipativity. Outline. Motivation. Dissipative Systems. M. Sami Fadali EBME Dept., UNR
 Dissipativity M. Sami Fadali EBME Dept., UNR 1 Outline Differential storage functions. QSR Dissipativity. Algebraic conditions for dissipativity. Stability of dissipative systems. Feedback Interconnections
Dissipativity M. Sami Fadali EBME Dept., UNR 1 Outline Differential storage functions. QSR Dissipativity. Algebraic conditions for dissipativity. Stability of dissipative systems. Feedback Interconnections
Machine Learning (Spring 2012) Principal Component Analysis
 Principal Component Analysis") 1-71 Machine Learning (Spring 1) Principal Component Analysis Yang Xu This note is partly based on Chapter 1.1 in Chris Bishop s book on PRML and the lecture slides on PCA written by Carlos Guestrin in
1-71 Machine Learning (Spring 1) Principal Component Analysis Yang Xu This note is partly based on Chapter 1.1 in Chris Bishop s book on PRML and the lecture slides on PCA written by Carlos Guestrin in
Exercise 8: Frequency Response of MIMO Systems
 Exercise 8: Frequency Response of MIMO Systems 8 Singular Value Decomposition (SVD The Singular Value Decomposition plays a central role in MIMO frequency response analysis Let s recall some concepts from
Exercise 8: Frequency Response of MIMO Systems 8 Singular Value Decomposition (SVD The Singular Value Decomposition plays a central role in MIMO frequency response analysis Let s recall some concepts from
H -Optimal Control and Related Minimax Design Problems
 Tamer Başar Pierre Bernhard H -Optimal Control and Related Minimax Design Problems A Dynamic Game Approach Second Edition 1995 Birkhäuser Boston Basel Berlin Contents Preface v 1 A General Introduction
Tamer Başar Pierre Bernhard H -Optimal Control and Related Minimax Design Problems A Dynamic Game Approach Second Edition 1995 Birkhäuser Boston Basel Berlin Contents Preface v 1 A General Introduction
CS168: The Modern Algorithmic Toolbox Lecture #8: How PCA Works
 CS68: The Modern Algorithmic Toolbox Lecture #8: How PCA Works Tim Roughgarden & Gregory Valiant April 20, 206 Introduction Last lecture introduced the idea of principal components analysis (PCA). The
CS68: The Modern Algorithmic Toolbox Lecture #8: How PCA Works Tim Roughgarden & Gregory Valiant April 20, 206 Introduction Last lecture introduced the idea of principal components analysis (PCA). The
arxiv: v1 [math.oc] 17 Oct 2014
![arxiv: v1 [math.oc] 17 Oct 2014](/thumbs/88/117008567.jpg "arxiv: v1 [math.oc] 17 Oct 2014") SiMpLIfy: A Toolbox for Structured Model Reduction Martin Biel, Farhad Farokhi, and Henrik Sandberg arxiv:1414613v1 [mathoc] 17 Oct 214 Abstract In this paper, we present a toolbox for structured model
SiMpLIfy: A Toolbox for Structured Model Reduction Martin Biel, Farhad Farokhi, and Henrik Sandberg arxiv:1414613v1 [mathoc] 17 Oct 214 Abstract In this paper, we present a toolbox for structured model
AN OVERVIEW OF MODEL REDUCTION TECHNIQUES APPLIED TO LARGE-SCALE STRUCTURAL DYNAMICS AND CONTROL MOTIVATING EXAMPLE INVERTED PENDULUM
 Controls Lab AN OVERVIEW OF MODEL REDUCTION TECHNIQUES APPLIED TO LARGE-SCALE STRUCTURAL DYNAMICS AND CONTROL Eduardo Gildin (UT ICES and Rice Univ.) with Thanos Antoulas (Rice ECE) Danny Sorensen (Rice
Controls Lab AN OVERVIEW OF MODEL REDUCTION TECHNIQUES APPLIED TO LARGE-SCALE STRUCTURAL DYNAMICS AND CONTROL Eduardo Gildin (UT ICES and Rice Univ.) with Thanos Antoulas (Rice ECE) Danny Sorensen (Rice
Technical report bds:00-21
 Delft University of Technology Fac. of Information Technology and Systems Control Systems Engineering Technical report bds:00-21 Stability Analysis of Discrete Event Systems (by K.M. Passino and K.L. Burgess,
Delft University of Technology Fac. of Information Technology and Systems Control Systems Engineering Technical report bds:00-21 Stability Analysis of Discrete Event Systems (by K.M. Passino and K.L. Burgess,
Introduction to Computer Control Systems
 Introduction to Computer Control Systems Lecture 1: Introduction Dave Zachariah Div. Systems and Control, Dept. Information Technology, Uppsala University October 28, 2014 (UU/Info Technology/SysCon) Intro.
Introduction to Computer Control Systems Lecture 1: Introduction Dave Zachariah Div. Systems and Control, Dept. Information Technology, Uppsala University October 28, 2014 (UU/Info Technology/SysCon) Intro.
OPTIMAL CONTROL AND ESTIMATION
 OPTIMAL CONTROL AND ESTIMATION Robert F. Stengel Department of Mechanical and Aerospace Engineering Princeton University, Princeton, New Jersey DOVER PUBLICATIONS, INC. New York CONTENTS 1. INTRODUCTION
OPTIMAL CONTROL AND ESTIMATION Robert F. Stengel Department of Mechanical and Aerospace Engineering Princeton University, Princeton, New Jersey DOVER PUBLICATIONS, INC. New York CONTENTS 1. INTRODUCTION
Contents. 1 State-Space Linear Systems 5. 2 Linearization Causality, Time Invariance, and Linearity 31
 Contents Preamble xiii Linear Systems I Basic Concepts 1 I System Representation 3 1 State-Space Linear Systems 5 1.1 State-Space Linear Systems 5 1.2 Block Diagrams 7 1.3 Exercises 11 2 Linearization
Contents Preamble xiii Linear Systems I Basic Concepts 1 I System Representation 3 1 State-Space Linear Systems 5 1.1 State-Space Linear Systems 5 1.2 Block Diagrams 7 1.3 Exercises 11 2 Linearization
Reduced Basis Method for Parametric
 1/24 Reduced Basis Method for Parametric H 2 -Optimal Control Problems NUMOC2017 Andreas Schmidt, Bernard Haasdonk Institute for Applied Analysis and Numerical Simulation, University of Stuttgart andreas.schmidt@mathematik.uni-stuttgart.de
1/24 Reduced Basis Method for Parametric H 2 -Optimal Control Problems NUMOC2017 Andreas Schmidt, Bernard Haasdonk Institute for Applied Analysis and Numerical Simulation, University of Stuttgart andreas.schmidt@mathematik.uni-stuttgart.de
CDS Final Exam
 CDS 22 - Final Exam Instructor: Danielle C. Tarraf December 4, 2007 INSTRUCTIONS : Please read carefully! () Description & duration of the exam: The exam consists of 6 problems. You have a total of 24
CDS 22 - Final Exam Instructor: Danielle C. Tarraf December 4, 2007 INSTRUCTIONS : Please read carefully! () Description & duration of the exam: The exam consists of 6 problems. You have a total of 24
Lecture 5 Multivariate Linear Regression
 Lecture 5 Multivariate Linear Regression Dan Sheldon September 23, 2014 Topics Multivariate linear regression Model Cost function Normal equations Gradient descent Features Book Data 10 8 Weight (lbs.)
Lecture 5 Multivariate Linear Regression Dan Sheldon September 23, 2014 Topics Multivariate linear regression Model Cost function Normal equations Gradient descent Features Book Data 10 8 Weight (lbs.)
Principal Component Analysis (PCA) CSC411/2515 Tutorial
 CSC411/2515 Tutorial") Principal Component Analysis (PCA) CSC411/2515 Tutorial Harris Chan Based on previous tutorial slides by Wenjie Luo, Ladislav Rampasek University of Toronto hchan@cs.toronto.edu October 19th, 2017 (UofT)
Principal Component Analysis (PCA) CSC411/2515 Tutorial Harris Chan Based on previous tutorial slides by Wenjie Luo, Ladislav Rampasek University of Toronto hchan@cs.toronto.edu October 19th, 2017 (UofT)
Control Systems I. Lecture 1: Introduction. Suggested Readings: Åström & Murray Ch. 1, Guzzella Ch. 1. Emilio Frazzoli
 Control Systems I Lecture 1: Introduction Suggested Readings: Åström & Murray Ch. 1, Guzzella Ch. 1 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 22, 2017 E. Frazzoli
Control Systems I Lecture 1: Introduction Suggested Readings: Åström & Murray Ch. 1, Guzzella Ch. 1 Emilio Frazzoli Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 22, 2017 E. Frazzoli
Optimal Control Theory SF 2852
 university-logo Optimal Control Theory SF 2852 Ulf Jönsson Optimization and Systems Theory, Department of Mathematics Royal Institute of Technology (KTH) Spring 2011 university-logo Optimal Control Theory
university-logo Optimal Control Theory SF 2852 Ulf Jönsson Optimization and Systems Theory, Department of Mathematics Royal Institute of Technology (KTH) Spring 2011 university-logo Optimal Control Theory
Linear algebra for MATH2601: Theory
 Linear algebra for MATH2601: Theory László Erdős August 12, 2000 Contents 1 Introduction 4 1.1 List of crucial problems............................... 5 1.2 Importance of linear algebra............................
Linear algebra for MATH2601: Theory László Erdős August 12, 2000 Contents 1 Introduction 4 1.1 List of crucial problems............................... 5 1.2 Importance of linear algebra............................
Optimal Control Theory SF 2852
 Optimal Control Theory SF 2852 Johan Karlsson Optimization and Systems Theory, Department of Mathematics Royal Institute of Technology (KTH) Spring 2017 Optimal Control Theory SF 2852 1 Course information
Optimal Control Theory SF 2852 Johan Karlsson Optimization and Systems Theory, Department of Mathematics Royal Institute of Technology (KTH) Spring 2017 Optimal Control Theory SF 2852 1 Course information
Introduction. Dagmar Iber Jörg Stelling. CSB Deterministic, SS 2015, 1.
 Introduction Dagmar Iber Jörg Stelling joerg.stelling@bsse.ethz.ch CSB Deterministic, SS 2015, 1 Origins of Systems Biology On this assumption of the passage of blood, made as a basis for argument, and
Introduction Dagmar Iber Jörg Stelling joerg.stelling@bsse.ethz.ch CSB Deterministic, SS 2015, 1 Origins of Systems Biology On this assumption of the passage of blood, made as a basis for argument, and
Tensor network simulations of strongly correlated quantum systems
 CENTRE FOR QUANTUM TECHNOLOGIES NATIONAL UNIVERSITY OF SINGAPORE AND CLARENDON LABORATORY UNIVERSITY OF OXFORD Tensor network simulations of strongly correlated quantum systems Stephen Clark LXXT[[[GSQPEFS\EGYOEGXMZMXMIWUYERXYQGSYVWI
CENTRE FOR QUANTUM TECHNOLOGIES NATIONAL UNIVERSITY OF SINGAPORE AND CLARENDON LABORATORY UNIVERSITY OF OXFORD Tensor network simulations of strongly correlated quantum systems Stephen Clark LXXT[[[GSQPEFS\EGYOEGXMZMXMIWUYERXYQGSYVWI
EG4321/EG7040. Nonlinear Control. Dr. Matt Turner
 EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
EG4321/EG7040 Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear Control Dr. Matt Turner EG4321/EG7040 [An introduction to] Nonlinear [System Analysis] and Control Dr. Matt
Announcements (repeat) Principal Components Analysis
 Principal Components Analysis") 4/7/7 Announcements repeat Principal Components Analysis CS 5 Lecture #9 April 4 th, 7 PA4 is due Monday, April 7 th Test # will be Wednesday, April 9 th Test #3 is Monday, May 8 th at 8AM Just hour long
4/7/7 Announcements repeat Principal Components Analysis CS 5 Lecture #9 April 4 th, 7 PA4 is due Monday, April 7 th Test # will be Wednesday, April 9 th Test #3 is Monday, May 8 th at 8AM Just hour long
Geoinformation in Environmental Modelling
 Geoinformation in Environmental Modelling Introduction to the topics ENY-C2005 Jaakko Madetoja 5.1.2018 Slides by Paula Ahonen-Rainio Topics today Orientation to geoinformation in environmental modelling
Geoinformation in Environmental Modelling Introduction to the topics ENY-C2005 Jaakko Madetoja 5.1.2018 Slides by Paula Ahonen-Rainio Topics today Orientation to geoinformation in environmental modelling
LU Factorization. LU factorization is the most common way of solving linear systems! Ax = b LUx = b
 AM 205: lecture 7 Last time: LU factorization Today s lecture: Cholesky factorization, timing, QR factorization Reminder: assignment 1 due at 5 PM on Friday September 22 LU Factorization LU factorization
AM 205: lecture 7 Last time: LU factorization Today s lecture: Cholesky factorization, timing, QR factorization Reminder: assignment 1 due at 5 PM on Friday September 22 LU Factorization LU factorization
Control Systems I. Lecture 1: Introduction. Suggested Readings: Åström & Murray Ch. 1. Jacopo Tani
 Control Systems I Lecture 1: Introduction Suggested Readings: Åström & Murray Ch. 1 Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 21, 2018 J. Tani, E. Frazzoli (ETH)
Control Systems I Lecture 1: Introduction Suggested Readings: Åström & Murray Ch. 1 Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich September 21, 2018 J. Tani, E. Frazzoli (ETH)
Estimation, Detection, and Identification CMU 18752
 Estimation, Detection, and Identification CMU 18752 Graduate Course on the CMU/Portugal ECE PhD Program Spring 2008/2009 Instructor: Prof. Paulo Jorge Oliveira pjcro @ isr.ist.utl.pt Phone: +351 21 8418053
Estimation, Detection, and Identification CMU 18752 Graduate Course on the CMU/Portugal ECE PhD Program Spring 2008/2009 Instructor: Prof. Paulo Jorge Oliveira pjcro @ isr.ist.utl.pt Phone: +351 21 8418053
Preface. Figures Figures appearing in the text were prepared using MATLAB R. For product information, please contact:
 Linear algebra forms the basis for much of modern mathematics theoretical, applied, and computational. The purpose of this book is to provide a broad and solid foundation for the study of advanced mathematics.
Linear algebra forms the basis for much of modern mathematics theoretical, applied, and computational. The purpose of this book is to provide a broad and solid foundation for the study of advanced mathematics.
Assignment #10: Diagonalization of Symmetric Matrices, Quadratic Forms, Optimization, Singular Value Decomposition. Name:
 Assignment #10: Diagonalization of Symmetric Matrices, Quadratic Forms, Optimization, Singular Value Decomposition Due date: Friday, May 4, 2018 (1:35pm) Name: Section Number Assignment #10: Diagonalization
Assignment #10: Diagonalization of Symmetric Matrices, Quadratic Forms, Optimization, Singular Value Decomposition Due date: Friday, May 4, 2018 (1:35pm) Name: Section Number Assignment #10: Diagonalization
Lecture 1: Introduction
 EE 227A: Convex Optimization and Applications January 17 Lecture 1: Introduction Lecturer: Anh Pham Reading assignment: Chapter 1 of BV 1. Course outline and organization Course web page: http://www.eecs.berkeley.edu/~elghaoui/teaching/ee227a/
EE 227A: Convex Optimization and Applications January 17 Lecture 1: Introduction Lecturer: Anh Pham Reading assignment: Chapter 1 of BV 1. Course outline and organization Course web page: http://www.eecs.berkeley.edu/~elghaoui/teaching/ee227a/
Chapter 3. Tohru Katayama
 Subspace Methods for System Identification Chapter 3 Tohru Katayama Subspace Methods Reading Group UofA, Edmonton Barnabás Póczos May 14, 2009 Preliminaries before Linear Dynamical Systems Hidden Markov
Subspace Methods for System Identification Chapter 3 Tohru Katayama Subspace Methods Reading Group UofA, Edmonton Barnabás Póczos May 14, 2009 Preliminaries before Linear Dynamical Systems Hidden Markov
EET 3212 Control Systems. Control Systems Engineering, 6th Edition, Norman S. Nise December 2010, A. Goykadosh and M.
 NEW YORK CITY COLLEGE OF TECHNOLOGY The City University of New York 300 Jay Street Brooklyn, NY 11201-2983 Department of Electrical and Telecommunications Engineering Technology TEL (718) 260-5300 - FAX:
NEW YORK CITY COLLEGE OF TECHNOLOGY The City University of New York 300 Jay Street Brooklyn, NY 11201-2983 Department of Electrical and Telecommunications Engineering Technology TEL (718) 260-5300 - FAX:
Copyright. SRS, U DuE, rof. Söffker. Course Control Theory WiSe 2014/15
 Course Theory WiSe 2014/15 Room: SG 135 Time: Fr 3.00 6.30 pm (lecture and exercise) Practical exercise: 2nd part of semester Assistants: Xi Nowak, M.Sc.; WEB: http://www.uni-due.de/srs Manuscript Note
Course Theory WiSe 2014/15 Room: SG 135 Time: Fr 3.00 6.30 pm (lecture and exercise) Practical exercise: 2nd part of semester Assistants: Xi Nowak, M.Sc.; WEB: http://www.uni-due.de/srs Manuscript Note
Résonance et contrôle en cavité ouverte
 Résonance et contrôle en cavité ouverte Jérôme Hœpffner KTH, Sweden Avec Espen Åkervik, Uwe Ehrenstein, Dan Henningson Outline The flow case Investigation tools resonance Reduced dynamic model for feedback
Résonance et contrôle en cavité ouverte Jérôme Hœpffner KTH, Sweden Avec Espen Åkervik, Uwe Ehrenstein, Dan Henningson Outline The flow case Investigation tools resonance Reduced dynamic model for feedback
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #36 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Friday, April 4, 2003 3. Cascade Control Next we turn to an
ELEC ENG 4CL4: Control System Design Notes for Lecture #36 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Friday, April 4, 2003 3. Cascade Control Next we turn to an
AUTOMATIC CONTROL. Andrea M. Zanchettin, PhD Spring Semester, Introduction to Automatic Control & Linear systems (time domain)
") 1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Introduction to Automatic Control & Linear systems (time domain) 2 What is automatic control? From Wikipedia Control theory is an interdisciplinary
1 AUTOMATIC CONTROL Andrea M. Zanchettin, PhD Spring Semester, 2018 Introduction to Automatic Control & Linear systems (time domain) 2 What is automatic control? From Wikipedia Control theory is an interdisciplinary
Lecture 7 : Generalized Plant and LFT form Dr.-Ing. Sudchai Boonto Assistant Professor
 Dr.-Ing. Sudchai Boonto Assistant Professor Department of Control System and Instrumentation Engineering King Mongkuts Unniversity of Technology Thonburi Thailand Linear Quadratic Gaussian The state space
Dr.-Ing. Sudchai Boonto Assistant Professor Department of Control System and Instrumentation Engineering King Mongkuts Unniversity of Technology Thonburi Thailand Linear Quadratic Gaussian The state space
FRTN 15 Predictive Control
 Department of AUTOMATIC CONTROL FRTN 5 Predictive Control Final Exam March 4, 27, 8am - 3pm General Instructions This is an open book exam. You may use any book you want, including the slides from the
Department of AUTOMATIC CONTROL FRTN 5 Predictive Control Final Exam March 4, 27, 8am - 3pm General Instructions This is an open book exam. You may use any book you want, including the slides from the
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
FEL3210 Multivariable Feedback Control Lecture 5: Uncertainty and Robustness in SISO Systems [Ch.7-(8)] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 5:Uncertainty and Robustness () FEL3210 MIMO
Math (P)Review Part I:
Review Part I:") Lecture 1: Math (P)Review Part I: Linear Algebra Computer Graphics CMU 15-462/15-662, Fall 2017 Homework 0.0 (Due Monday!) Exercises will be a bit harder / more rigorous than what you will do for the rest
Lecture 1: Math (P)Review Part I: Linear Algebra Computer Graphics CMU 15-462/15-662, Fall 2017 Homework 0.0 (Due Monday!) Exercises will be a bit harder / more rigorous than what you will do for the rest
Control for Coordination of Linear Systems
 Control for Coordination of Linear Systems André C.M. Ran Department of Mathematics, Vrije Universiteit De Boelelaan 181a, 181 HV Amsterdam, The Netherlands Jan H. van Schuppen CWI, P.O. Box 9479, 19 GB
Control for Coordination of Linear Systems André C.M. Ran Department of Mathematics, Vrije Universiteit De Boelelaan 181a, 181 HV Amsterdam, The Netherlands Jan H. van Schuppen CWI, P.O. Box 9479, 19 GB
Linear System Theory. Wonhee Kim Lecture 1. March 7, 2018
 Linear System Theory Wonhee Kim Lecture 1 March 7, 2018 1 / 22 Overview Course Information Prerequisites Course Outline What is Control Engineering? Examples of Control Systems Structure of Control Systems
Linear System Theory Wonhee Kim Lecture 1 March 7, 2018 1 / 22 Overview Course Information Prerequisites Course Outline What is Control Engineering? Examples of Control Systems Structure of Control Systems
Robust Multivariable Control
 Lecture 1 Anders Helmersson anders.helmersson@liu.se ISY/Reglerteknik Linköpings universitet Addresses email: anders.helmerson@liu.se mobile: 0734278419 http://users.isy.liu.se/rt/andersh/teaching/robkurs.html
Lecture 1 Anders Helmersson anders.helmersson@liu.se ISY/Reglerteknik Linköpings universitet Addresses email: anders.helmerson@liu.se mobile: 0734278419 http://users.isy.liu.se/rt/andersh/teaching/robkurs.html
Kernel Methods in Machine Learning
 Kernel Methods in Machine Learning Autumn 2015 Lecture 1: Introduction Juho Rousu ICS-E4030 Kernel Methods in Machine Learning 9. September, 2015 uho Rousu (ICS-E4030 Kernel Methods in Machine Learning)
Kernel Methods in Machine Learning Autumn 2015 Lecture 1: Introduction Juho Rousu ICS-E4030 Kernel Methods in Machine Learning 9. September, 2015 uho Rousu (ICS-E4030 Kernel Methods in Machine Learning)
Background Mathematics (2/2) 1. David Barber
 1. David Barber") Background Mathematics (2/2) 1 David Barber University College London Modified by Samson Cheung (sccheung@ieee.org) 1 These slides accompany the book Bayesian Reasoning and Machine Learning. The book and
Background Mathematics (2/2) 1 David Barber University College London Modified by Samson Cheung (sccheung@ieee.org) 1 These slides accompany the book Bayesian Reasoning and Machine Learning. The book and
Crash course Verification of Finite Automata Binary Decision Diagrams
 Crash course Verification of Finite Automata Binary Decision Diagrams Exercise session 10 Xiaoxi He 1 Equivalence of representations E Sets A B A B Set algebra,, ψψ EE = 1 ψψ AA = ff ψψ BB = gg ψψ AA BB
Crash course Verification of Finite Automata Binary Decision Diagrams Exercise session 10 Xiaoxi He 1 Equivalence of representations E Sets A B A B Set algebra,, ψψ EE = 1 ψψ AA = ff ψψ BB = gg ψψ AA BB
Intro to Linear & Nonlinear Optimization
 ECE 174 Intro to Linear & Nonlinear Optimization i Ken Kreutz-Delgado ECE Department, UCSD Contact Information Course Website Accessible from http://dsp.ucsd.edu/~kreutz Instructor Ken Kreutz-Delgado kreutz@ece.ucsd.eduucsd
ECE 174 Intro to Linear & Nonlinear Optimization i Ken Kreutz-Delgado ECE Department, UCSD Contact Information Course Website Accessible from http://dsp.ucsd.edu/~kreutz Instructor Ken Kreutz-Delgado kreutz@ece.ucsd.eduucsd
Mathematical Relationships Between Representations of Structure in Linear Interconnected Dynamical Systems
 American Control Conference on O'Farrell Street, San Francisco, CA, USA June 9 - July, Mathematical Relationships Between Representations of Structure in Linear Interconnected Dynamical Systems E. Yeung,
American Control Conference on O'Farrell Street, San Francisco, CA, USA June 9 - July, Mathematical Relationships Between Representations of Structure in Linear Interconnected Dynamical Systems E. Yeung,
Applied Nonlinear Control
 Applied Nonlinear Control JEAN-JACQUES E. SLOTINE Massachusetts Institute of Technology WEIPING LI Massachusetts Institute of Technology Pearson Education Prentice Hall International Inc. Upper Saddle
Applied Nonlinear Control JEAN-JACQUES E. SLOTINE Massachusetts Institute of Technology WEIPING LI Massachusetts Institute of Technology Pearson Education Prentice Hall International Inc. Upper Saddle
Sensor Fusion, 2014 Lecture 1: 1 Lectures
 Sensor Fusion, 2014 Lecture 1: 1 Lectures Lecture Content 1 Course overview. Estimation theory for linear models. 2 Estimation theory for nonlinear models 3 Sensor networks and detection theory 4 Nonlinear
Sensor Fusion, 2014 Lecture 1: 1 Lectures Lecture Content 1 Course overview. Estimation theory for linear models. 2 Estimation theory for nonlinear models 3 Sensor networks and detection theory 4 Nonlinear
Limits of Computation + Course Recap
 Limits of Computation + Course Recap ORF 363/COS 323 Instructor: Amir Ali Ahmadi TAs: Y. Chen, G. Hall, J. Ye Fall 2014 1 Reminder: NP-hard and NP-complete problems Definition. A decision problem is said
Limits of Computation + Course Recap ORF 363/COS 323 Instructor: Amir Ali Ahmadi TAs: Y. Chen, G. Hall, J. Ye Fall 2014 1 Reminder: NP-hard and NP-complete problems Definition. A decision problem is said
Information Structures Preserved Under Nonlinear Time-Varying Feedback
 Information Structures Preserved Under Nonlinear Time-Varying Feedback Michael Rotkowitz Electrical Engineering Royal Institute of Technology (KTH) SE-100 44 Stockholm, Sweden Email: michael.rotkowitz@ee.kth.se
Information Structures Preserved Under Nonlinear Time-Varying Feedback Michael Rotkowitz Electrical Engineering Royal Institute of Technology (KTH) SE-100 44 Stockholm, Sweden Email: michael.rotkowitz@ee.kth.se
Balancing of Lossless and Passive Systems
 Balancing of Lossless and Passive Systems Arjan van der Schaft Abstract Different balancing techniques are applied to lossless nonlinear systems, with open-loop balancing applied to their scattering representation.
Balancing of Lossless and Passive Systems Arjan van der Schaft Abstract Different balancing techniques are applied to lossless nonlinear systems, with open-loop balancing applied to their scattering representation.
Second Edition This version: August 29, 2001
 MULTIVARIABLE FEEDBACK CONTROL Analysis and design Sigurd Skogestad Norwegian University of Science and Technology Ian Postlethwaite University of Leicester Second Edition This version: August 29, 2001
MULTIVARIABLE FEEDBACK CONTROL Analysis and design Sigurd Skogestad Norwegian University of Science and Technology Ian Postlethwaite University of Leicester Second Edition This version: August 29, 2001
Dissipative Systems Analysis and Control
 Bernard Brogliato, Rogelio Lozano, Bernhard Maschke and Olav Egeland Dissipative Systems Analysis and Control Theory and Applications 2nd Edition With 94 Figures 4y Sprin er 1 Introduction 1 1.1 Example
Bernard Brogliato, Rogelio Lozano, Bernhard Maschke and Olav Egeland Dissipative Systems Analysis and Control Theory and Applications 2nd Edition With 94 Figures 4y Sprin er 1 Introduction 1 1.1 Example
Today s Outline. Biostatistics Statistical Inference Lecture 01 Introduction to BIOSTAT602 Principles of Data Reduction
 Today s Outline Biostatistics 602 - Statistical Inference Lecture 01 Introduction to Principles of Hyun Min Kang Course Overview of January 10th, 2013 Hyun Min Kang Biostatistics 602 - Lecture 01 January
Today s Outline Biostatistics 602 - Statistical Inference Lecture 01 Introduction to Principles of Hyun Min Kang Course Overview of January 10th, 2013 Hyun Min Kang Biostatistics 602 - Lecture 01 January
 2018 SPRING PHYS 8011 Classical mechanics I (as of Apr. 19/2018) The course syllabus is a general plan for the course; deviations announced to the class by the instructor may be necessary. A FRIENDLY REMINDER:
2018 SPRING PHYS 8011 Classical mechanics I (as of Apr. 19/2018) The course syllabus is a general plan for the course; deviations announced to the class by the instructor may be necessary. A FRIENDLY REMINDER:
Intro to Linear & Nonlinear Optimization
 ECE 174 Intro to Linear & Nonlinear Optimization Ken Kreutz-Delgado ECE Department UCSD Version 10.5.2017 Contact Information Fall 2017 Course Website Accessible from http://dsp.ucsd.edu/~kreutz/; Piazza:
ECE 174 Intro to Linear & Nonlinear Optimization Ken Kreutz-Delgado ECE Department UCSD Version 10.5.2017 Contact Information Fall 2017 Course Website Accessible from http://dsp.ucsd.edu/~kreutz/; Piazza:
Lecture 4: Analysis of MIMO Systems
 Lecture 4: Analysis of MIMO Systems Norms The concept of norm will be extremely useful for evaluating signals and systems quantitatively during this course In the following, we will present vector norms
Lecture 4: Analysis of MIMO Systems Norms The concept of norm will be extremely useful for evaluating signals and systems quantitatively during this course In the following, we will present vector norms
Mathematics for Control Theory
 Mathematics for Control Theory H 2 and H system norms Hanz Richter Mechanical Engineering Department Cleveland State University Reading materials We will use: Michael Green and David Limebeer, Linear Robust
Mathematics for Control Theory H 2 and H system norms Hanz Richter Mechanical Engineering Department Cleveland State University Reading materials We will use: Michael Green and David Limebeer, Linear Robust
TEACHING NUMERICAL LINEAR ALGEBRA AT THE UNDERGRADUATE LEVEL by Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University
 TEACHING NUMERICAL LINEAR ALGEBRA AT THE UNDERGRADUATE LEVEL by Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University DeKalb, IL 60115 E-mail: dattab@math.niu.edu What is Numerical
TEACHING NUMERICAL LINEAR ALGEBRA AT THE UNDERGRADUATE LEVEL by Biswa Nath Datta Department of Mathematical Sciences Northern Illinois University DeKalb, IL 60115 E-mail: dattab@math.niu.edu What is Numerical
A Singular Value Decomposition Based Closed Loop Stability Preserving Controller Reduction Method
 A Singular Value Decomposition Based Closed Loop Stability Preserving Controller Reduction Method Kin Cheong Sou and Anders Rantzer Abstract In this paper a controller reduction method which preserves
A Singular Value Decomposition Based Closed Loop Stability Preserving Controller Reduction Method Kin Cheong Sou and Anders Rantzer Abstract In this paper a controller reduction method which preserves
Lecture 7: Exponential Smoothing Methods Please read Chapter 4 and Chapter 2 of MWH Book
 Lecture 7: Exponential Smoothing Methods Please read Chapter 4 and Chapter 2 of MWH Book 1 Big Picture 1. In lecture 6, smoothing (averaging) method is used to estimate the trend-cycle (decomposition)
Lecture 7: Exponential Smoothing Methods Please read Chapter 4 and Chapter 2 of MWH Book 1 Big Picture 1. In lecture 6, smoothing (averaging) method is used to estimate the trend-cycle (decomposition)
CONTROL SYSTEMS, ROBOTICS AND AUTOMATION CONTENTS VOLUME VII
 CONTENTS VOLUME VII Control of Linear Multivariable Systems 1 Katsuhisa Furuta,Tokyo Denki University, School of Science and Engineering, Ishizaka, Hatoyama, Saitama, Japan 1. Linear Multivariable Systems
CONTENTS VOLUME VII Control of Linear Multivariable Systems 1 Katsuhisa Furuta,Tokyo Denki University, School of Science and Engineering, Ishizaka, Hatoyama, Saitama, Japan 1. Linear Multivariable Systems
CHAPTER 5 : REDUCTION OF MULTIPLE SUBSYSTEMS
 CHAPTER 5 : REDUCTION OF MULTIPLE SUBSYSTEMS Objectives Students should be able to: Reduce a block diagram of multiple subsystems to a single block representing the transfer function from input to output
CHAPTER 5 : REDUCTION OF MULTIPLE SUBSYSTEMS Objectives Students should be able to: Reduce a block diagram of multiple subsystems to a single block representing the transfer function from input to output
Control Systems I. Lecture 7: Feedback and the Root Locus method. Readings: Jacopo Tani. Institute for Dynamic Systems and Control D-MAVT ETH Zürich
 Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 2, 2018 J. Tani, E. Frazzoli (ETH) Lecture 7:
Control Systems I Lecture 7: Feedback and the Root Locus method Readings: Jacopo Tani Institute for Dynamic Systems and Control D-MAVT ETH Zürich November 2, 2018 J. Tani, E. Frazzoli (ETH) Lecture 7:
Math 1553 Introduction to Linear Algebra. School of Mathematics Georgia Institute of Technology
 Math 1553 Introduction to Linear Algebra School of Mathematics Georgia Institute of Technology Chapter 1 Overview Linear. Algebra. What is Linear Algebra? Linear having to do with lines/planes/etc. For
Math 1553 Introduction to Linear Algebra School of Mathematics Georgia Institute of Technology Chapter 1 Overview Linear. Algebra. What is Linear Algebra? Linear having to do with lines/planes/etc. For
Linear Algebra Review
 Linear Algebra Review CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Linear Algebra Review 1 / 16 Midterm Exam Tuesday Feb
Linear Algebra Review CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Linear Algebra Review 1 / 16 Midterm Exam Tuesday Feb
Announce Statistical Motivation Properties Spectral Theorem Other ODE Theory Spectral Embedding. Eigenproblems I
 Eigenproblems I CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Eigenproblems I 1 / 33 Announcements Homework 1: Due tonight
Eigenproblems I CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Eigenproblems I 1 / 33 Announcements Homework 1: Due tonight
SYLLABUS SEFS 540 / ESRM 490 B Optimization Techniques for Natural Resources Spring 2017
 SYLLABUS SEFS 540 / ESRM 490 B Optimization Techniques for Natural Resources Spring 2017 Lectures: Winkenwerder Hall 107, 4:50-5:50pm, MW Labs: Mary Gates Hall 030, 1:30-2:50pm, Th Course Web Site: http://faculty.washington.edu/toths/course.shtml
SYLLABUS SEFS 540 / ESRM 490 B Optimization Techniques for Natural Resources Spring 2017 Lectures: Winkenwerder Hall 107, 4:50-5:50pm, MW Labs: Mary Gates Hall 030, 1:30-2:50pm, Th Course Web Site: http://faculty.washington.edu/toths/course.shtml
Department of Mechanical Engineering MECH 221 (with MECH 224 & MATH 255) Engineering Science I
 Engineering Science I") Department of Mechanical Engineering MECH 221 (with MECH 224 & MATH 255) Engineering Science I Calendar Description: Rigid body kinetics and kinematics, basic electrical circuits, work and power, stress
Department of Mechanical Engineering MECH 221 (with MECH 224 & MATH 255) Engineering Science I Calendar Description: Rigid body kinetics and kinematics, basic electrical circuits, work and power, stress
Clustering-Based Model Order Reduction for Multi-Agent Systems with General Linear Time-Invariant Agents
 Max Planck Institute Magdeburg Preprints Petar Mlinarić Sara Grundel Peter Benner Clustering-Based Model Order Reduction for Multi-Agent Systems with General Linear Time-Invariant Agents MAX PLANCK INSTITUT
Max Planck Institute Magdeburg Preprints Petar Mlinarić Sara Grundel Peter Benner Clustering-Based Model Order Reduction for Multi-Agent Systems with General Linear Time-Invariant Agents MAX PLANCK INSTITUT
DECENTRALIZED CONTROL DESIGN USING LMI MODEL REDUCTION
 Journal of ELECTRICAL ENGINEERING, VOL. 58, NO. 6, 2007, 307 312 DECENTRALIZED CONTROL DESIGN USING LMI MODEL REDUCTION Szabolcs Dorák Danica Rosinová Decentralized control design approach based on partial
Journal of ELECTRICAL ENGINEERING, VOL. 58, NO. 6, 2007, 307 312 DECENTRALIZED CONTROL DESIGN USING LMI MODEL REDUCTION Szabolcs Dorák Danica Rosinová Decentralized control design approach based on partial
Announce Statistical Motivation ODE Theory Spectral Embedding Properties Spectral Theorem Other. Eigenproblems I
 Eigenproblems I CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Eigenproblems I 1 / 33 Announcements Homework 1: Due tonight
Eigenproblems I CS 205A: Mathematical Methods for Robotics, Vision, and Graphics Doug James (and Justin Solomon) CS 205A: Mathematical Methods Eigenproblems I 1 / 33 Announcements Homework 1: Due tonight
CS264: Beyond Worst-Case Analysis Lecture #15: Topic Modeling and Nonnegative Matrix Factorization
 CS264: Beyond Worst-Case Analysis Lecture #15: Topic Modeling and Nonnegative Matrix Factorization Tim Roughgarden February 28, 2017 1 Preamble This lecture fulfills a promise made back in Lecture #1,
CS264: Beyond Worst-Case Analysis Lecture #15: Topic Modeling and Nonnegative Matrix Factorization Tim Roughgarden February 28, 2017 1 Preamble This lecture fulfills a promise made back in Lecture #1,
Subject: Optimal Control Assignment-1 (Related to Lecture notes 1-10)
") Subject: Optimal Control Assignment- (Related to Lecture notes -). Design a oil mug, shown in fig., to hold as much oil possible. The height and radius of the mug should not be more than 6cm. The mug must
Subject: Optimal Control Assignment- (Related to Lecture notes -). Design a oil mug, shown in fig., to hold as much oil possible. The height and radius of the mug should not be more than 6cm. The mug must
Glocal Control for Network Systems via Hierarchical State-Space Expansion
 Glocal Control for Network Systems via Hierarchical State-Space Expansion Hampei Sasahara, Takayuki Ishizaki, Tomonori Sadamoto, Jun-ichi Imura, Henrik Sandberg 2, and Karl Henrik Johansson 2 Abstract
Glocal Control for Network Systems via Hierarchical State-Space Expansion Hampei Sasahara, Takayuki Ishizaki, Tomonori Sadamoto, Jun-ichi Imura, Henrik Sandberg 2, and Karl Henrik Johansson 2 Abstract
High-Performance Scientific Computing
 High-Performance Scientific Computing Instructor: Randy LeVeque TA: Grady Lemoine Applied Mathematics 483/583, Spring 2011 http://www.amath.washington.edu/~rjl/am583 World s fastest computers http://top500.org
High-Performance Scientific Computing Instructor: Randy LeVeque TA: Grady Lemoine Applied Mathematics 483/583, Spring 2011 http://www.amath.washington.edu/~rjl/am583 World s fastest computers http://top500.org
OUTBREAK INVESTIGATION AND SPATIAL ANALYSIS OF SURVEILLANCE DATA: CLUSTER DATA ANALYSIS. Preliminary Programme / Draft_2. Serbia, Mai 2013
 OUTBREAK INVESTIGATION AND SPATIAL ANALYSIS OF SURVEILLANCE DATA: CLUSTER DATA ANALYSIS Preliminary Programme / Draft_2 Serbia, 20-24 Mai 2013 1. Course presentation Outbreak investigation is one of the
OUTBREAK INVESTIGATION AND SPATIAL ANALYSIS OF SURVEILLANCE DATA: CLUSTER DATA ANALYSIS Preliminary Programme / Draft_2 Serbia, 20-24 Mai 2013 1. Course presentation Outbreak investigation is one of the
Problem Weight Score Total 100
 EE 350 EXAM IV 15 December 2010 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
EE 350 EXAM IV 15 December 2010 Last Name (Print): First Name (Print): ID number (Last 4 digits): Section: DO NOT TURN THIS PAGE UNTIL YOU ARE TOLD TO DO SO Problem Weight Score 1 25 2 25 3 25 4 25 Total
Modeling and Analysis of Dynamic Systems
 Modeling and Analysis of Dynamic Systems by Dr. Guillaume Ducard Fall 2016 Institute for Dynamic Systems and Control ETH Zurich, Switzerland 1/22 Outline 1 Lecture 5: Hydraulic Systems Pelton Turbine:
Modeling and Analysis of Dynamic Systems by Dr. Guillaume Ducard Fall 2016 Institute for Dynamic Systems and Control ETH Zurich, Switzerland 1/22 Outline 1 Lecture 5: Hydraulic Systems Pelton Turbine:
IOE 611/Math 663: Nonlinear Programming
 1. Introduction I course logistics I mathematical optimization I least-squares and linear programming I convex optimization I example I course goals and topics I nonlinear optimization I brief history
1. Introduction I course logistics I mathematical optimization I least-squares and linear programming I convex optimization I example I course goals and topics I nonlinear optimization I brief history
Full-State Feedback Design for a Multi-Input System
 Full-State Feedback Design for a Multi-Input System A. Introduction The open-loop system is described by the following state space model. x(t) = Ax(t)+Bu(t), y(t) =Cx(t)+Du(t) () 4 8.5 A =, B =.5.5, C
Full-State Feedback Design for a Multi-Input System A. Introduction The open-loop system is described by the following state space model. x(t) = Ax(t)+Bu(t), y(t) =Cx(t)+Du(t) () 4 8.5 A =, B =.5.5, C
FEL3210 Multivariable Feedback Control
 FEL3210 Multivariable Feedback Control Lecture 6: Robust stability and performance in MIMO systems [Ch.8] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 6: Robust Stability and Performance () FEL3210
FEL3210 Multivariable Feedback Control Lecture 6: Robust stability and performance in MIMO systems [Ch.8] Elling W. Jacobsen, Automatic Control Lab, KTH Lecture 6: Robust Stability and Performance () FEL3210
1 Singular Value Decomposition and Principal Component
 Singular Value Decomposition and Principal Component Analysis In these lectures we discuss the SVD and the PCA, two of the most widely used tools in machine learning. Principal Component Analysis (PCA)
Singular Value Decomposition and Principal Component Analysis In these lectures we discuss the SVD and the PCA, two of the most widely used tools in machine learning. Principal Component Analysis (PCA)
ECE317 : Feedback and Control
 ECE317 : Feedback and Control Lecture : Steady-state error Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling Analysis Design Laplace
ECE317 : Feedback and Control Lecture : Steady-state error Dr. Richard Tymerski Dept. of Electrical and Computer Engineering Portland State University 1 Course roadmap Modeling Analysis Design Laplace
Processing Big Data Matrix Sketching
 Processing Big Data Matrix Sketching Dimensionality reduction Linear Principal Component Analysis: SVD-based Compressed sensing Matrix sketching Non-linear Kernel PCA Isometric mapping Matrix sketching
Processing Big Data Matrix Sketching Dimensionality reduction Linear Principal Component Analysis: SVD-based Compressed sensing Matrix sketching Non-linear Kernel PCA Isometric mapping Matrix sketching
Model reduction for linear systems by balancing
 Model reduction for linear systems by balancing Bart Besselink Jan C. Willems Center for Systems and Control Johann Bernoulli Institute for Mathematics and Computer Science University of Groningen, Groningen,
Model reduction for linear systems by balancing Bart Besselink Jan C. Willems Center for Systems and Control Johann Bernoulli Institute for Mathematics and Computer Science University of Groningen, Groningen,