CMSC427 Parametric curves: Hermite, Catmull-Rom, Bezier
|
|
|
- Curtis Clark
- 6 years ago
- Views:
Transcription
1 CMSC427 Parametric curves: Hermite, Catmull-Rom, Bezier


 Start with curves, then")
2 Modeling Creating 3D objects How to construct complicated surfaces? Goal Specify objects with few control points Resulting object should be visually pleasing (smooth) Start with curves, then generalize to surfaces 2

3 Usefulness of curves Surface of revolution 3
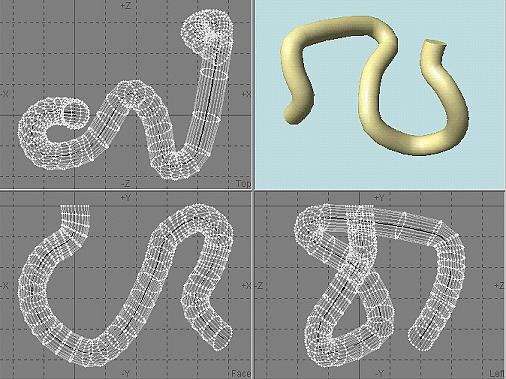
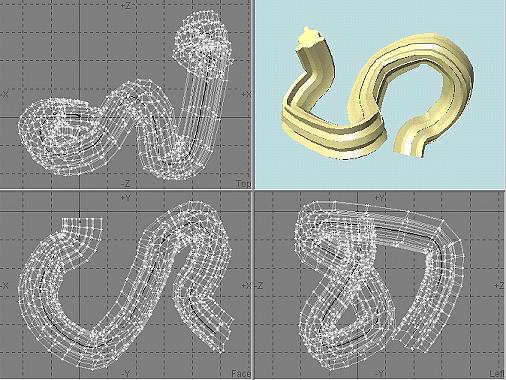
4 Usefulness of curves Extruded/swept surfaces 4

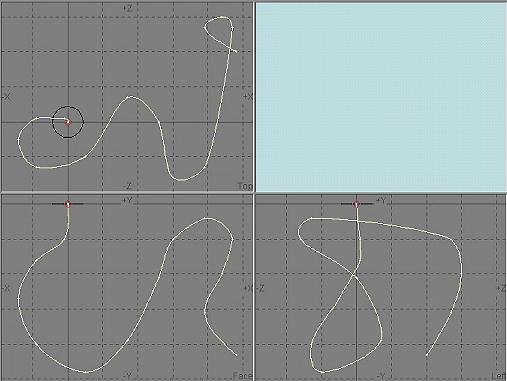
5 Usefulness of curves Animation Provide a track for objects Use as camera path 5




6 Usefulness of curves Generalize to surface patches using grids of curves, next class 6
7 How to represent curves Specify every point along curve? Hard to get precise, smooth results Too much data, too hard to work with Idea: specify curves using small numbers of control points Mathematics: use polynomials to represent curves Control point 7
8 Interpolating polynomial curves Curve goes through all control points Seems most intuitive Surprisingly, not usually the best choice Hard to predict behavior Overshoots, wiggles Hard to get nice-looking curves Control point Interpolating curve 8
9 Approximating polynomial curves Curve is influenced by control points Control point Various types & techniques based on polynomial functions Bézier curves, B-splines, NURBS Focus on Bézier curves 9
10 Mathematical definition A vector valued function of one variable x(t) Given t, compute a 3D point x=(x,y,z) May interpret as three functions x(t), y(t), z(t) Moving a point along the curve x(t) z y x(0.0) x(0.5) x(1.0) x 10
11 Tangent vector Derivative A vector that points in the direction of movement Length of x (t) corresponds to speed x(t) z y x (0.0) x (0.5) x (1.0) x 11

12 Piecewise polynomial curves Model complex shapes by sequence Use polyline to store control points 12
13 Continuity How piecewise curves join Ck continuity kth derivatives match Gk continuity kth derivatives are proportional 13
14 Hermite curves Cubic curve (here 2D) x t = at 3 + bt 6 + ct + d y t = et 3 + ft 6 + gt + h Interpolates end points P0 and P1 Matches tangent at endpoints T0 and T1 (also dp0 and dp1 in these notes). P1 = (x1,y1) T1=<dx1,dy1> P0=(x0,y0) T0=<dx0,dy0>
15 Computing coefficients a, b, c and d Derivative of x(t) x t = 3at 6 + 2bt + c Set t = 0 and 1 for endpoints Four constraints x 0 = d x (0) = c x 1 = a + b + c + d x 1 = 3a + 2b + c
16 Solve for a, b, c and d Solve for a, b, c and d d = x0 c = dx0 b = 3x0 + 3x1 2dx0 dx1 a = 2x0 2x1 + dx0 + dx1
17 Matrix version Constraints x 0 = d x (0) = c x 1 = a + b + c + d x 1 = 3a + 2b + c Give a b c d = x0 x1 dx0 dx1
18 Solve matrix version: basis matrix Since we have MA = G We can solve with A = M \] G And get Hermite basis matrix M \] a b c d = x0 x1 dx0 dx1
19 Vector version To include x, y and z, rewrite with vectors P0, P1 and tangents T0 and T1 a b c d = P0 P1 T0 T1 Coefficients a, b, c and d are now vectors
20 Full polynomial version Rewrite polynomial as dot product P t = t 3 t 6 t 1 a b c d = t 3 t 6 t P0 P1 T0 T1
21 Blending functions Instead of polynomial in t, look at curve as weighted sum of P0, P1, T0 and T1 x t = 2x0 2x1 + dx0 + dx1 t 3 + 3x0 + 3x1 2dx0 dx1 t 6 + dx0 t +x0
22 Blending functions Instead of polynomial in t, look at curve as weighted sum of P0, P1, T0 and T1 x t = 2t 3 3t x0 + 2t 3 + 3t 6 x1 + t 3 2t 6 + t dx0 + t 3 t 6 dx1
 = t 3 2t 6 + t h11(t) = t 3 t 6")
23 Blending functions h00(t) = 2t 3 3t h01(t) = 2t 3 + 3t 6 h10(t) = t 3 2t 6 + t h11(t) = t 3 t 6
24 Computing Hermite tangents Have P(-1), P0, P1 and P2 as input Compute tangent with H matrix x0 x1 dx0 dx1 = x o x ] x \] x 6
25 Combine with Hermite basis Unify notation a b c d = x o x ] x \] x 6 Final matrix a b c d = x o x ] x \] x 6
26 Catmull-Rom curves Hermite problem with C1 continuity P1 left P3 right P5 P0 P2 P4
27 Catmull-Rom curves Catmull-Rom make tangent symmetric Define by two adjacent points Here T3 = P4-P2 P1 P3 P5 P0 P2 P4
28 Catmull-Rom curves Need to change H matrix ½ traditional for C-R curves x0 x1 dx0 dx1 = /2 0 1/2 0 1/ /2 x o x ] x \] x 6
29 Catmull-Rom curves Which gives a b c d = /2 0 1/2 0 1/ /2 x o x ] x \] x 6 Or a b c d = x o x ] x \] x 6
30 Bézier curves A particularly intuitive way to define control points for polynomial curves Developed for CAD (computer aided design) and manufacturing Before games, before movies, CAD was the big application for CG Pierre Bézier (1962), design of auto bodies for Peugeot, Paul de Casteljau (1959), for Citroen 30
31 Bézier curves Higher order extension of linear interpolation Control points p 0, p 1,... p 1 p 1 p 2 p 1 p 3 p 0 p 0 p 0 p 2 Linear Quadratic Cubic 31
32 Bézier curves Intuitive control over curve given control points Endpoints are interpolated, intermediate points are approximated Convex Hull property Variation-diminishing property 32
33 Cubic Bézier curve Cubic polynomials, most common case Defined by 4 control points Two interpolated endpoints Two midpoints control the tangent at the endpoints p 1 x(t) p 0 p 2 Control polyline p 3 33
34 Bézier Curve formulation Three alternatives, analogous to linear case 1. Weighted average of control points 2. Cubic polynomial function of t 3. Matrix form Algorithmic construction de Casteljau algorithm 34
35 de Casteljau Algorithm A recursive series of linear interpolations Works for any order, not only cubic Not terribly efficient to evaluate Other forms more commonly used Why study it? Intuition about the geometry Useful for subdivision (later today) 35
36 de Casteljau Algorithm Given the control points A value of t Here t 0.25 p 1 p 0 p 2 p 3 36
37 de Casteljau Algorithm p 1 q 1 q 0 (t) = Lerp( t,p 0,p ) 1 p 0 q 0 q 1 (t) = Lerp( t,p 1,p ) 2 p 2 q 2 (t) = Lerp( t,p 2,p ) 3 q 2 p 3 37
38 de Casteljau Algorithm q 0 r 0 q 1 r 0 (t) = Lerp( t,q 0 (t),q 1 (t)) r 1 (t) = Lerp( t,q 1 (t),q 2 (t)) r 1 q 2 38
39 de Casteljau Algorithm r 0 x r 1 x(t) = Lerp( t,r 0 (t),r 1 (t)) 39
40 de Casteljau algorithm p 1 p 0 x p 2 Applets p 3 40
41 de Casteljau Algorithm Linear Quadratic Cubic Quartic 41
42 Recursive linear interpolation x = Lerp t,r 0,r 1 r = Lerp ( t,q,q ) r 1 = Lerp t,q 1,q 2 q 0 = Lerp( t,p 0,p ) 1 q 1 = Lerp( t,p 1,p ) 2 q 2 = Lerp( t,p 2,p ) 3 p 0 p 1 p 2 p 3 p 1 q 0 r 0 p 2 x q 1 r 1 p 3 q 2 p 4 42
43 Recursive linear interpolation x = Lerp t,r 0,r 1 r = Lerp ( t,q,q ) r 1 = Lerp t,q 1,q 2 q 0 = Lerp( t,p 0,p ) 1 q 1 = Lerp( t,p 1,p ) 2 q 2 = Lerp( t,p 2,p ) 3 p 0 p 1 p 2 p 3 p 1 q 0 r 0 p 2 x q 1 r 1 p 3 q 2 p 4 43
44 Recursive linear interpolation x = Lerp t,r 0,r 1 r = Lerp ( t,q,q ) r 1 = Lerp t,q 1,q 2 q 0 = Lerp( t,p 0,p ) 1 q 1 = Lerp( t,p 1,p ) 2 q 2 = Lerp( t,p 2,p ) 3 p 0 p 1 p 2 p 3 p 1 q 0 r 0 p 2 x q 1 r 1 p 3 q 2 p 4 44
45 Recursive linear interpolation x = Lerp t,r 0,r 1 r = Lerp ( t,q,q ) r 1 = Lerp t,q 1,q 2 q 0 = Lerp( t,p 0,p ) 1 q 1 = Lerp( t,p 1,p ) 2 q 2 = Lerp( t,p 2,p ) 3 p 0 p 1 p 2 p 3 p 1 q 0 r 0 p 2 x q 1 r 1 p 3 q 2 p 4 45
46 Expand the LERPs q 0 (t) = Lerp( t,p 0,p 1 )= ( 1- t)p 0 + tp 1 q 1 (t) = Lerp( t,p 1,p 2 )= ( 1- t)p 1 + tp 2 q 2 (t) = Lerp( t,p 2,p 3 )= ( 1- t)p 2 + tp 3 r 0 (t) = Lerp( t,q 0 (t),q 1 (t))= 1- t r 1 (t) = Lerp( t,q 1 (t),q 2 (t))= 1- t p 0 + tp 1 )+ t ( 1- t)p 1 + tp 2 p 1 + tp 2 )+ t ( 1- t)p 2 + tp 3 1- t 1- t x(t) = Lerp t,r 0 (t),r 1 (t) = ( 1- t) ( 1- t) ( 1- t)p 0 + tp 1 )+ t ( 1- t)p 1 + tp 2 +t ( 1- t) ( 1- t)p 1 + tp 2 )+ t ( 1- t)p 2 + tp 3 46
47 Expand the LERPs q 0 (t) = Lerp( t,p 0,p 1 )= ( 1- t)p 0 + tp 1 q 1 (t) = Lerp( t,p 1,p 2 )= ( 1- t)p 1 + tp 2 q 2 (t) = Lerp( t,p 2,p 3 )= ( 1- t)p 2 + tp 3 r 0 (t) = Lerp( t,q 0 (t),q 1 (t))= 1- t r 1 (t) = Lerp( t,q 1 (t),q 2 (t))= 1- t p 0 + tp 1 )+ t ( 1- t)p 1 + tp 2 p 1 + tp 2 )+ t ( 1- t)p 2 + tp 3 1- t 1- t x(t) = Lerp t,r 0 (t),r 1 (t) = ( 1- t) ( 1- t) ( 1- t)p 0 + tp 1 )+ t ( 1- t)p 1 + tp 2 +t ( 1- t) ( 1- t)p 1 + tp 2 )+ t ( 1- t)p 2 + tp 3 47
48 Expand the LERPs q 0 (t) = Lerp( t,p 0,p 1 )= ( 1- t)p 0 + tp 1 q 1 (t) = Lerp( t,p 1,p 2 )= ( 1- t)p 1 + tp 2 q 2 (t) = Lerp( t,p 2,p 3 )= ( 1- t)p 2 + tp 3 r 0 (t) = Lerp( t,q 0 (t),q 1 (t))= 1- t r 1 (t) = Lerp( t,q 1 (t),q 2 (t))= 1- t p 0 + tp 1 )+ t ( 1- t)p 1 + tp 2 p 1 + tp 2 )+ t ( 1- t)p 2 + tp 3 1- t 1- t x(t) = Lerp t,r 0 (t),r 1 (t) = ( 1- t) ( 1- t) ( 1- t)p 0 + tp 1 )+ t ( 1- t)p 1 + tp 2 +t ( 1- t) ( 1- t)p 1 + tp 2 )+ t ( 1- t)p 2 + tp 3 48
49 Expand the LERPs q 0 (t) = Lerp( t,p 0,p 1 )= ( 1- t)p 0 + tp 1 q 1 (t) = Lerp( t,p 1,p 2 )= ( 1- t)p 1 + tp 2 q 2 (t) = Lerp( t,p 2,p 3 )= ( 1- t)p 2 + tp 3 r 0 (t) = Lerp( t,q 0 (t),q 1 (t))= 1- t r 1 (t) = Lerp( t,q 1 (t),q 2 (t))= 1- t p 0 + tp 1 )+ t ( 1- t)p 1 + tp 2 p 1 + tp 2 )+ t ( 1- t)p 2 + tp 3 1- t 1- t x(t) = Lerp t,r 0 (t),r 1 (t) = ( 1- t) ( 1- t) ( 1- t)p 0 + tp 1 )+ t ( 1- t)p 1 + tp 2 +t ( 1- t) ( 1- t)p 1 + tp 2 )+ t ( 1- t)p 2 + tp 3 49
50 Expand the LERPs q 0 (t) = Lerp( t,p 0,p 1 )= ( 1- t)p 0 + tp 1 q 1 (t) = Lerp( t,p 1,p 2 )= ( 1- t)p 1 + tp 2 q 2 (t) = Lerp( t,p 2,p 3 )= ( 1- t)p 2 + tp 3 r 0 (t) = Lerp( t,q 0 (t),q 1 (t))= 1- t r 1 (t) = Lerp( t,q 1 (t),q 2 (t))= 1- t p 0 + tp 1 )+ t ( 1- t)p 1 + tp 2 p 1 + tp 2 )+ t ( 1- t)p 2 + tp 3 1- t 1- t x(t) = Lerp t,r 0 (t),r 1 (t) = ( 1- t) ( 1- t) ( 1- t)p 0 + tp 1 )+ t ( 1- t)p 1 + tp 2 +t ( 1- t) ( 1- t)p 1 + tp 2 )+ t ( 1- t)p 2 + tp 3 50
51 Weighted average of control points Regroup x(t) = 1- t p 0 + tp 1 )+ t ( 1 - t)p 1 + tp 2 p 1 + tp 2 )+ t( 1- t)p 2 + tp 3 ) ( 1- t) 1 - t +t 1 - t 1 - t x(t) = ( 1- t) 3 p 0 + 3( 1 - t) 2 tp 1 + 3( 1 - t)t 2 p 2 + t 3 p 3 B 0 (t ) B " $$$ # $$$ % 1 (t ) " $$ # $$ % x(t) = -t 3 + 3t 2-3t + 1 p 0 + 3t 3-6t 2 + 3t! + -3t 3 + 3t 2 & $ ' $ ( p 2 + t 3 ) p 3 B 2 (t ) B 3 (t ) p 1 51
52 Weighted average of control points Regroup x(t) = 1- t p 0 + tp 1 )+ t ( 1 - t)p 1 + tp 2 p 1 + tp 2 )+ t( 1- t)p 2 + tp 3 ) ( 1- t) 1 - t +t 1 - t 1 - t x(t) = ( 1- t) 3 p 0 + 3( 1 - t) 2 tp 1 + 3( 1 - t)t 2 p 2 + t 3 p 3 B 0 (t ) B " $$$ # $$$ % 1 (t ) " $$ # $$ % x(t) = -t 3 + 3t 2-3t + 1 p 0 + 3t 3-6t 2 + 3t! + -3t 3 + 3t 2 & $ ' $ ( p 2 + t 3 ) p 3 B 2 (t ) B 3 (t ) p 1 52
53 Weighted average of control points Regroup x(t) = 1- t p 0 + tp 1 )+ t ( 1 - t)p 1 + tp 2 p 1 + tp 2 )+ t( 1- t)p 2 + tp 3 ) ( 1- t) 1 - t +t 1 - t 1 - t x(t) = ( 1- t) 3 p 0 + 3( 1 - t) 2 tp 1 + 3( 1 - t)t 2 p 2 + t 3 p 3 B 0 (t ) B " $$$ # $$$ % 1 (t ) " $$ # $$ % x(t) = -t 3 + 3t 2-3t + 1 p 0 + 3t 3-6t 2 + 3t! + -3t 3 + 3t 2 & $ ' $ ( p 2 + t 3 ) p 3 B 2 (t ) B 3 (t ) p 1 Bernstein polynomials 53
54 Cubic Bernstein polynomials x(t) = B 0 ( t)p 0 + B 1 ( t)p 1 + B 2 ( t)p 2 + B 3 ( t)p 3 The cubic Bernstein polynomials : B 0 ( t)= -t 3 + 3t 2-3t + 1 B 1 ( t)= 3t 3-6t 2 + 3t B 2 ( t)= -3t 3 + 3t 2 ( t)= t 3 B 3 å B i (t) = 1 Partition of unity, at each t always add to 1 Endpoint interpolation, B 0 and B 3 go to 1 54
55 General Bernstein polynomials B 1 0 B 1 1 ( t)= -t + 1 B 2 0 ( t)= t 2-2t + 1 B 3 0 ( t)= -t 3 + 3t 2-3t + 1 ( t)= t B 2 1 ( t)= -2t 2 + 2t B 3 1 ( t)= 3t 3-6t 2 + 3t B 2 2 ( t)= t 2 B 3 2 ( t)= -3t 3 + 3t 2 B 3 3 ( t)= t 3 B i n æ ( t)= n ö è ç i ø ( 1- t)n-i t å B n i ( t) = 1 n i æ ö è ç i ø = n! i! ( n - i)! 55
56 General Bernstein polynomials B 1 0 B 1 1 ( t)= -t + 1 B 2 0 ( t)= t 2-2t + 1 B 3 0 ( t)= -t 3 + 3t 2-3t + 1 ( t)= t B 2 1 ( t)= -2t 2 + 2t B 3 1 ( t)= 3t 3-6t 2 + 3t B 2 2 ( t)= t 2 B 3 2 ( t)= -3t 3 + 3t 2 B 3 3 ( t)= t 3 B i n æ ( t)= n ö è ç i ø ( 1- t)n-i t å B n i ( t) = 1 n i æ ö è ç i ø = n! i! ( n - i)! 56
57 General Bernstein polynomials B 1 0 B 1 1 ( t)= -t + 1 B 2 0 ( t)= t 2-2t + 1 B 3 0 ( t)= -t 3 + 3t 2-3t + 1 ( t)= t B 2 1 ( t)= -2t 2 + 2t B 3 1 ( t)= 3t 3-6t 2 + 3t B 2 2 ( t)= t 2 B 3 2 ( t)= -3t 3 + 3t 2 B 3 3 ( t)= t 3 B i n æ ( t)= n ö è ç i ø ( 1- t)n-i t å B n i ( t) = 1 n i æ ö è ç i ø = n! i! ( n - i)! 57
58 General Bernstein polynomials B 1 0 B 1 1 ( t)= -t + 1 B 2 0 ( t)= t 2-2t + 1 B 3 0 ( t)= -t 3 + 3t 2-3t + 1 ( t)= t B 2 1 ( t)= -2t 2 + 2t B 3 1 ( t)= 3t 3-6t 2 + 3t B 2 2 ( t)= t 2 B 3 2 ( t)= -3t 3 + 3t 2 B 3 3 ( t)= t 3 Order n: B i n æ ( t)= n ö è ç i ø ( 1- t)n-i t å B n i ( t) = 1 n i æ ö è ç i ø = n! i! ( n - i)! Partition of unity, endpoint interpolation 58
59 General Bézier curves nth-order Bernstein polynomials form nth-order Bézier curves Bézier curves are weighted sum of control points using nth-order Bernstein polynomials Bernstein polynomials of order n: Bézier curve of order n: B i n æ ( t)= n ö è ç i ø ( 1- t)n-i t n å i=0 x( t)= B n i ( t)p i i 59
60 Bézier curve properties Convex hull property Variation diminishing property Affine invariance 60
61 Convex hull, convex combination Convex hull of a set of points Smallest polyhedral volume such that (i) all points are in it (ii) line connecting any two points in the volume lies completely inside it (or on its boundary) Convex combination of the points Weighted average of the points, where weights all between 0 and 1, sum up to 1 Any convex combination always lies within the convex hull p 1 p 3 Convex hull p 0 p 2 61
62 Convex hull property Bézier curve is a convex combination of the control points Bernstein polynomials add to 1 at each value of t Curve is always inside the convex hull of control points Makes curve predictable Allows efficient culling, intersection testing, adaptive tessellation p 1 p 3 p 0 p 2 62

63 Variation diminishing property If the curve is in a plane, this means no straight line intersects a Bézier curve more times than it intersects the curve's control polyline Curve is not more wiggly than control polyline Yellow line: 7 intersections with control polyline 3 intersections with curve 63
64 Affine invariance Two ways to transform Bézier curves 1. Transform the control points, then compute resulting point on curve 2. Compute point on curve, then transform it Either way, get the same transform point! Curve is defined via affine combination of points (convex combination is special case of an affine combination) Invariant under affine transformations Convex hull property always remains 64
65 Cubic polynomial form Start with Bernstein form: x(t) = (-t 3 + 3t 2-3t + 1)p 0 + ( 3t 3-6t 2 + 3t)p 1 + (-3t 3 + 3t 2 )p 2 + ( t 3 )p 3 Regroup into coefficients of t : x(t) = (-p 0 + 3p 1-3p 2 + p 3 )t 3 + ( 3p 0-6p 1 + 3p 2 )t 2 + (-3p 0 + 3p 1 )t + ( p 0 )1 a = (-p 0 + 3p 1-3p 2 + p 3 ) b = ( 3p x(t) = at 3 + bt 2 0-6p 1 + 3p 2 ) + ct + d c = (-3p 0 + 3p 1 ) Good for fast evaluation, precompute constant d = coefficients (a,b,c,d) ( p 0 ) Not much geometric intuition 65
66 Cubic polynomial form Start with Bernstein form: x(t) = (-t 3 + 3t 2-3t + 1)p 0 + ( 3t 3-6t 2 + 3t)p 1 + (-3t 3 + 3t 2 )p 2 + ( t 3 )p 3 Regroup into coefficients of t : x(t) = (-p 0 + 3p 1-3p 2 + p 3 )t 3 + ( 3p 0-6p 1 + 3p 2 )t 2 + (-3p 0 + 3p 1 )t + ( p 0 )1 a = (-p 0 + 3p 1-3p 2 + p 3 ) b = ( 3p x(t) = at 3 + bt 2 0-6p 1 + 3p 2 ) + ct + d c = (-3p 0 + 3p 1 ) Good for fast evaluation, precompute constant d = coefficients (a,b,c,d) ( p 0 ) Not much geometric intuition 66
67 Cubic polynomial form Start with Bernstein form: x(t) = (-t 3 + 3t 2-3t + 1)p 0 + ( 3t 3-6t 2 + 3t)p 1 + (-3t 3 + 3t 2 )p 2 + ( t 3 )p 3 Regroup into coefficients of t : x(t) = (-p 0 + 3p 1-3p 2 + p 3 )t 3 + ( 3p 0-6p 1 + 3p 2 )t 2 + (-3p 0 + 3p 1 )t + ( p 0 )1 a = (-p 0 + 3p 1-3p 2 + p 3 ) b = ( 3p x(t) = at 3 + bt 2 0-6p 1 + 3p 2 ) + ct + d c = (-3p 0 + 3p 1 ) d = ( p 0 ) Good for fast evaluation, precompute constant coefficients (a,b,c,d) Not much geometric intuition 67
68 Cubic polynomial form Start with Bernstein form: x(t) = (-t 3 + 3t 2-3t + 1)p 0 + ( 3t 3-6t 2 + 3t)p 1 + (-3t 3 + 3t 2 )p 2 + ( t 3 )p 3 Regroup into coefficients of t : x(t) = (-p 0 + 3p 1-3p 2 + p 3 )t 3 + ( 3p 0-6p 1 + 3p 2 )t 2 + (-3p 0 + 3p 1 )t + ( p 0 )1 x(t) = at 3 + bt 2 + ct + d a = -p 0 + 3p 1-3p 2 + p 3 b = 3p 0-6p 1 + 3p 2 c = -3p 0 + 3p 1 d = p 0 Good for fast evaluation, precompute constant coefficients (a,b,c,d) Not much geometric intuition 68
69 Cubic matrix form x(t) = éë a " ét 3 ù " b c " ê t 2 ú dù ê ú û ê t ú ê ú ë 1 û " a = -p 0 + 3p 1-3p 2 + p 3 " b = ( 3p 0-6p 1 + 3p 2 ) " c = (-3p 0 + 3p 1 ) d = p 0 é ù ét 3 ù ê ú ê x(t) = [ p 0 p 1 p 2 p 3 ] ê ú t 2 ú ê ú ê ú ê t ú ê ú ê ú #%%% $ %%%& ë# %%% $ %%%& û ë 1 ' û G! Bez B Bez T Can construct other cubic curves by just using different basis matrix B Hermite, Catmull-Rom, B-Spline, 69
70 Cubic matrix form 3 parallel equations, in x, y and z: [ ] x x (t) = p 0 x p 1x p 2 x p 3x x y (t) = é ë p 0 y p 1y p 2 y p 3y x z (t) = éë p 0z p 1z p 2z p 3z ù û é ù ét 3 ù ê ú ê ê ú t 2 ú ê ú ê ú ê t ú ê ú ê ú ë û ë 1 û é ù ét 3 ù ê ú ê ê ú t 2 ú ê ú ê ú ê t ú ê ú ê ú ë û ë 1 û é ù ét 3 ù ê ú ê ê ú t 2 ú ê ú ùû ê ú ê t ú ê ú ê ú ë û ë 1 û 70
71 Matrix form Bundle into a single matrix x(t) = é ù ét 3 ù é p 0 x p 1x p 2 x p 3x ù ê ê ú ú ê ê p 0 y p 1y p 2 y p 3y ê ú t 2 ú ê ú ú ê ú ê t ú ëê p 0z p 1z p 2z p 3z ûú ê ú ê ú ë û ë 1 û x(t) = G Bez B Bez T x(t) = C T Efficient evaluation Precompute C Take advantage of existing 4x4 matrix hardware support 71
72 Drawing Bézier curves Generally no low-level support for drawing smooth curves I.e., GPU draws only straight line segments Need to break curves into line segments or individual pixels Approximating curves as series of line segments called tessellation Tessellation algorithms Uniform sampling Adaptive sampling Recursive subdivision 72
73 Uniform sampling Approximate curve with N-1 straight segments N chosen in advance Evaluate x i = x( t i ) where t i = i N for i = 0, 1,", N Connect the x i points = a # i3 with lines! N + b # i2 3 N + c # i 2 N + d Too few points? Bad approximation Curve is faceted Too many points? Slow to draw too many line segments x 0 Segments may draw on top of each other x(t) x 1 x 2 x 3 x4 73
74 Adaptive Sampling Use only as many line segments as you need Fewer segments where curve is mostly flat More segments where curve bends Segments never smaller than a pixel Various schemes for sampling, checking results, deciding whether to sample more x(t) 74
75 Recursive Subdivision Any cubic (or k-th order) curve segment can be expressed as a cubic (or k-th order) Bézier curve Any piece of a cubic (or k-th order) curve is itself a cubic (or k-th order) curve Therefore, any Bézier curve can be subdivided into smaller Bézier curves 75
76 de Casteljau subdivision p 1 p 0 q r 0 0 r x 1 p 2 q 2 de Casteljau construction points are the control points of two Bézier sub-segments (p 0,q 0,r 0,x) and (x,r 1,q 2,p 3 ) p 3 76
77 Adaptive subdivision algorithm 1. Use de Casteljau construction to split Bézier segment in middle (t=0.5) 2. For each half If flat enough : draw line segment Else: recurse from 1. for each half Curve is flat enough if hull is flat enough Test how far away midpoints are from straight segment connecting start and end If about a pixel, then hull is flat enough 77
78 Today Curves Introduction Polynomial curves Bézier curves Drawing Bézier curves Piecewise curves 78
79 More control points Cubic Bézier curve limited to 4 control points Cubic curve can only have one inflection Need more control points for more complex curves k-1 order Bézier curve with k control points Hard to control and hard to work with Intermediate points don t have obvious effect on shape Changing any control point changes the whole curve Want local support Each control point only influences nearby portion of curve 79
80 Piecewise curves (splines) Sequence of simple (low-order) curves, end-to-end Piecewise polynomial curve, or splines Sequence of line segments Piecewise linear curve (linear or first-order spline) Sequence of cubic curve segments Piecewise cubic curve, here piecewise Bézier (cubic spline) 80
81 Piecewise cubic Bézier curve Given 3N + 1 points p 0,p 1,",p 3N Define N Bézier segments: x 0 (t) = B 0 (t)p 0 + B 1 (t)p 1 + B 2 (t)p 2 + B 3 (t)p 3 x 1 (t) = B 0 (t)p 3 + B 1 (t)p 4 + B 2 (t)p 5 + B 3 (t)p 6 #! x N -1 (t) = B 0 (t)p 3N B 1 (t)p 3N -2 + B 2 (t)p 3N -1 + B 3 (t)p 3N p 7 p 8 p 0 p p 2 1 x 0 (t) p 3 x 1 (t) p 6 x 2 (t) p 9 x 3 (t) p 10 p 11 p 12 p 4 p 5 81
82 Piecewise cubic Bézier curve Global parameter u, 0<=u<=3N x(u) = ìx 0 ( 1 u), 0 u 3 3 ïx 1 ( 1 u - 1), 3 u 6 3 í ï" " î ïx N -1 ( 1 3 u - (N - 1)), 3N - 3 u 3N! 1 x(u) = x i ( u - i 3 ), where i = ê ë 1 u 3 ú û x(8.75) x 0 (t) x 1 (t) x 2 (t) x 3 (t) u=0 x(3.5) u=12 82
83 Continuity Want smooth curves C 0 continuity No gaps Segments match at the endpoints C 1 continuity: first derivative is well defined No corners Tangents/normals are C 0 continuous (no jumps) C 2 continuity: second derivative is well defined Tangents/normals are C 1 continuous Important for high quality reflections on surfaces 83

84 Piecewise cubic Bézier curve C 0 continuous by construction C 1 continuous at segment endpoints p 3i if p 3i - p 3i-1 = p 3i+1 - p 3i C 2 is harder to get p 4 p 2 p 1 p 2 P 3 p p 1 P 6 p 3 6 p 4 p 5 p 0 p 0 C 0 continuous p 5 C 1 continuous 84
85 Piecewise cubic Bézier curves Used often in 2D drawing programs Inconveniences Must have 4 or 7 or 10 or 13 or (1 plus a multiple of 3) control points Some points interpolate (endpoints), others approximate (handles) Need to impose constraints on control points to obtain C 1 continuity C 2 continuity more difficult Solutions User interface using Bézier handles Generalization to B-splines, next time 85


86 Bézier handles Segment end points (interpolating) presented as curve control points Midpoints (approximating points) presented as handles Can have option to enforce C 1 continuity [ Adobe Illustrator 86
Computergrafik. Matthias Zwicker Universität Bern Herbst 2016
 Computergrafik Matthias Zwicker Universität Bern Herbst 2016 2 Today Curves Introduction Polynomial curves Bézier curves Drawing Bézier curves Piecewise curves Modeling Creating 3D objects How to construct
Computergrafik Matthias Zwicker Universität Bern Herbst 2016 2 Today Curves Introduction Polynomial curves Bézier curves Drawing Bézier curves Piecewise curves Modeling Creating 3D objects How to construct
CSE 167: Lecture 11: Bézier Curves. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012
 CSE 167: Introduction to Computer Graphics Lecture 11: Bézier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012 Announcements Homework project #5 due Nov. 9 th at 1:30pm
CSE 167: Introduction to Computer Graphics Lecture 11: Bézier Curves Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012 Announcements Homework project #5 due Nov. 9 th at 1:30pm
Interpolation and polynomial approximation Interpolation
 Outline Interpolation and polynomial approximation Interpolation Lagrange Cubic Splines Approximation B-Splines 1 Outline Approximation B-Splines We still focus on curves for the moment. 2 3 Pierre Bézier
Outline Interpolation and polynomial approximation Interpolation Lagrange Cubic Splines Approximation B-Splines 1 Outline Approximation B-Splines We still focus on curves for the moment. 2 3 Pierre Bézier
Lecture 20: Bezier Curves & Splines
 Lecture 20: Bezier Curves & Splines December 6, 2016 12/6/16 CSU CS410 Bruce Draper & J. Ross Beveridge 1 Review: The Pen Metaphore Think of putting a pen to paper Pen position described by time t Seeing
Lecture 20: Bezier Curves & Splines December 6, 2016 12/6/16 CSU CS410 Bruce Draper & J. Ross Beveridge 1 Review: The Pen Metaphore Think of putting a pen to paper Pen position described by time t Seeing
Introduction to Computer Graphics. Modeling (1) April 13, 2017 Kenshi Takayama
 April 13, 2017 Kenshi Takayama") Introduction to Computer Graphics Modeling (1) April 13, 2017 Kenshi Takayama Parametric curves X & Y coordinates defined by parameter t ( time) Example: Cycloid x t = t sin t y t = 1 cos t Tangent (aka.
Introduction to Computer Graphics Modeling (1) April 13, 2017 Kenshi Takayama Parametric curves X & Y coordinates defined by parameter t ( time) Example: Cycloid x t = t sin t y t = 1 cos t Tangent (aka.
Bézier Curves and Splines
 CS-C3100 Computer Graphics Bézier Curves and Splines Majority of slides from Frédo Durand vectorportal.com CS-C3100 Fall 2017 Lehtinen Before We Begin Anything on your mind concerning Assignment 1? CS-C3100
CS-C3100 Computer Graphics Bézier Curves and Splines Majority of slides from Frédo Durand vectorportal.com CS-C3100 Fall 2017 Lehtinen Before We Begin Anything on your mind concerning Assignment 1? CS-C3100
Lecture 23: Hermite and Bezier Curves
 Lecture 23: Hermite and Bezier Curves November 16, 2017 11/16/17 CSU CS410 Fall 2017, Ross Beveridge & Bruce Draper 1 Representing Curved Objects So far we ve seen Polygonal objects (triangles) and Spheres
Lecture 23: Hermite and Bezier Curves November 16, 2017 11/16/17 CSU CS410 Fall 2017, Ross Beveridge & Bruce Draper 1 Representing Curved Objects So far we ve seen Polygonal objects (triangles) and Spheres
Arsène Pérard-Gayot (Slides by Piotr Danilewski)
") Computer Graphics - Splines - Arsène Pérard-Gayot (Slides by Piotr Danilewski) CURVES Curves Explicit y = f x f: R R γ = x, f x y = 1 x 2 Implicit F x, y = 0 F: R 2 R γ = x, y : F x, y = 0 x 2 + y 2 =
Computer Graphics - Splines - Arsène Pérard-Gayot (Slides by Piotr Danilewski) CURVES Curves Explicit y = f x f: R R γ = x, f x y = 1 x 2 Implicit F x, y = 0 F: R 2 R γ = x, y : F x, y = 0 x 2 + y 2 =
M2R IVR, October 12th Mathematical tools 1 - Session 2
 Mathematical tools 1 Session 2 Franck HÉTROY M2R IVR, October 12th 2006 First session reminder Basic definitions Motivation: interpolate or approximate an ordered list of 2D points P i n Definition: spline
Mathematical tools 1 Session 2 Franck HÉTROY M2R IVR, October 12th 2006 First session reminder Basic definitions Motivation: interpolate or approximate an ordered list of 2D points P i n Definition: spline
Sample Exam 1 KEY NAME: 1. CS 557 Sample Exam 1 KEY. These are some sample problems taken from exams in previous years. roughly ten questions.
 Sample Exam 1 KEY NAME: 1 CS 557 Sample Exam 1 KEY These are some sample problems taken from exams in previous years. roughly ten questions. Your exam will have 1. (0 points) Circle T or T T Any curve
Sample Exam 1 KEY NAME: 1 CS 557 Sample Exam 1 KEY These are some sample problems taken from exams in previous years. roughly ten questions. Your exam will have 1. (0 points) Circle T or T T Any curve
Bernstein polynomials of degree N are defined by
 SEC. 5.5 BÉZIER CURVES 309 5.5 Bézier Curves Pierre Bézier at Renault and Paul de Casteljau at Citroën independently developed the Bézier curve for CAD/CAM operations, in the 1970s. These parametrically
SEC. 5.5 BÉZIER CURVES 309 5.5 Bézier Curves Pierre Bézier at Renault and Paul de Casteljau at Citroën independently developed the Bézier curve for CAD/CAM operations, in the 1970s. These parametrically
Curves. Hakan Bilen University of Edinburgh. Computer Graphics Fall Some slides are courtesy of Steve Marschner and Taku Komura
 Curves Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Taku Komura How to create a virtual world? To compose scenes We need to define objects
Curves Hakan Bilen University of Edinburgh Computer Graphics Fall 2017 Some slides are courtesy of Steve Marschner and Taku Komura How to create a virtual world? To compose scenes We need to define objects
The Essentials of CAGD
 The Essentials of CAGD Chapter 4: Bézier Curves: Cubic and Beyond Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000
The Essentials of CAGD Chapter 4: Bézier Curves: Cubic and Beyond Gerald Farin & Dianne Hansford CRC Press, Taylor & Francis Group, An A K Peters Book www.farinhansford.com/books/essentials-cagd c 2000
MAT300/500 Programming Project Spring 2019
 MAT300/500 Programming Project Spring 2019 Please submit all project parts on the Moodle page for MAT300 or MAT500. Due dates are listed on the syllabus and the Moodle site. You should include all neccessary
MAT300/500 Programming Project Spring 2019 Please submit all project parts on the Moodle page for MAT300 or MAT500. Due dates are listed on the syllabus and the Moodle site. You should include all neccessary
Approximation of Circular Arcs by Parametric Polynomials
 Approximation of Circular Arcs by Parametric Polynomials Emil Žagar Lecture on Geometric Modelling at Charles University in Prague December 6th 2017 1 / 44 Outline Introduction Standard Reprezentations
Approximation of Circular Arcs by Parametric Polynomials Emil Žagar Lecture on Geometric Modelling at Charles University in Prague December 6th 2017 1 / 44 Outline Introduction Standard Reprezentations
CGT 511. Curves. Curves. Curves. What is a curve? 2) A continuous map of a 1D space to an nd space
 A continuous map of a 1D space to an nd space") Curves CGT 511 Curves Bedřich Beneš, Ph.D. Purdue University Department of Computer Graphics Technology What is a curve? Mathematical ldefinition i i is a bit complex 1) The continuous o image of an interval
Curves CGT 511 Curves Bedřich Beneš, Ph.D. Purdue University Department of Computer Graphics Technology What is a curve? Mathematical ldefinition i i is a bit complex 1) The continuous o image of an interval
Reading. w Foley, Section 11.2 Optional
 Parametric Curves w Foley, Section.2 Optional Reading w Bartels, Beatty, and Barsky. An Introduction to Splines for use in Computer Graphics and Geometric Modeling, 987. w Farin. Curves and Surfaces for
Parametric Curves w Foley, Section.2 Optional Reading w Bartels, Beatty, and Barsky. An Introduction to Splines for use in Computer Graphics and Geometric Modeling, 987. w Farin. Curves and Surfaces for
Curves, Surfaces and Segments, Patches
 Curves, Surfaces and Segments, atches The University of Texas at Austin Conics: Curves and Quadrics: Surfaces Implicit form arametric form Rational Bézier Forms and Join Continuity Recursive Subdivision
Curves, Surfaces and Segments, atches The University of Texas at Austin Conics: Curves and Quadrics: Surfaces Implicit form arametric form Rational Bézier Forms and Join Continuity Recursive Subdivision
On-Line Geometric Modeling Notes
 On-Line Geometric Modeling Notes CUBIC BÉZIER CURVES Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University of California, Davis Overview The Bézier curve representation
On-Line Geometric Modeling Notes CUBIC BÉZIER CURVES Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University of California, Davis Overview The Bézier curve representation
Computer Graphics Keyframing and Interpola8on
 Computer Graphics Keyframing and Interpola8on This Lecture Keyframing and Interpola2on two topics you are already familiar with from your Blender modeling and anima2on of a robot arm Interpola2on linear
Computer Graphics Keyframing and Interpola8on This Lecture Keyframing and Interpola2on two topics you are already familiar with from your Blender modeling and anima2on of a robot arm Interpola2on linear
MA 323 Geometric Modelling Course Notes: Day 12 de Casteljau s Algorithm and Subdivision
 MA 323 Geometric Modelling Course Notes: Day 12 de Casteljau s Algorithm and Subdivision David L. Finn Yesterday, we introduced barycentric coordinates and de Casteljau s algorithm. Today, we want to go
MA 323 Geometric Modelling Course Notes: Day 12 de Casteljau s Algorithm and Subdivision David L. Finn Yesterday, we introduced barycentric coordinates and de Casteljau s algorithm. Today, we want to go
Keyframing. CS 448D: Character Animation Prof. Vladlen Koltun Stanford University
 Keyframing CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Keyframing in traditional animation Master animator draws key frames Apprentice fills in the in-between frames Keyframing
Keyframing CS 448D: Character Animation Prof. Vladlen Koltun Stanford University Keyframing in traditional animation Master animator draws key frames Apprentice fills in the in-between frames Keyframing
MA 323 Geometric Modelling Course Notes: Day 07 Parabolic Arcs
 MA 323 Geometric Modelling Course Notes: Day 07 Parabolic Arcs David L. Finn December 9th, 2004 We now start considering the basic curve elements to be used throughout this course; polynomial curves and
MA 323 Geometric Modelling Course Notes: Day 07 Parabolic Arcs David L. Finn December 9th, 2004 We now start considering the basic curve elements to be used throughout this course; polynomial curves and
1.1. The analytical denition. Denition. The Bernstein polynomials of degree n are dened analytically:
 DEGREE REDUCTION OF BÉZIER CURVES DAVE MORGAN Abstract. This paper opens with a description of Bézier curves. Then, techniques for the degree reduction of Bézier curves, along with a discussion of error
DEGREE REDUCTION OF BÉZIER CURVES DAVE MORGAN Abstract. This paper opens with a description of Bézier curves. Then, techniques for the degree reduction of Bézier curves, along with a discussion of error
Animation Curves and Splines 1
 Animation Curves and Splines 1 Animation Homework Set up a simple avatar E.g. cube/sphere (or square/circle if 2D) Specify some key frames (positions/orientations) Associate a time with each key frame
Animation Curves and Splines 1 Animation Homework Set up a simple avatar E.g. cube/sphere (or square/circle if 2D) Specify some key frames (positions/orientations) Associate a time with each key frame
Home Page. Title Page. Contents. Bezier Curves. Milind Sohoni sohoni. Page 1 of 27. Go Back. Full Screen. Close.
 Bezier Curves Page 1 of 27 Milind Sohoni http://www.cse.iitb.ac.in/ sohoni Recall Lets recall a few things: 1. f : [0, 1] R is a function. 2. f 0,..., f i,..., f n are observations of f with f i = f( i
Bezier Curves Page 1 of 27 Milind Sohoni http://www.cse.iitb.ac.in/ sohoni Recall Lets recall a few things: 1. f : [0, 1] R is a function. 2. f 0,..., f i,..., f n are observations of f with f i = f( i
Introduction to Curves. Modelling. 3D Models. Points. Lines. Polygons Defined by a sequence of lines Defined by a list of ordered points
 Introduction to Curves Modelling Points Defined by 2D or 3D coordinates Lines Defined by a set of 2 points Polygons Defined by a sequence of lines Defined by a list of ordered points 3D Models Triangular
Introduction to Curves Modelling Points Defined by 2D or 3D coordinates Lines Defined by a set of 2 points Polygons Defined by a sequence of lines Defined by a list of ordered points 3D Models Triangular
Interpolation and polynomial approximation Interpolation
 Outline Interpolation and polynomial approximation Interpolation Lagrange Cubic Approximation Bézier curves B- 1 Some vocabulary (again ;) Control point : Geometric point that serves as support to the
Outline Interpolation and polynomial approximation Interpolation Lagrange Cubic Approximation Bézier curves B- 1 Some vocabulary (again ;) Control point : Geometric point that serves as support to the
Smooth Path Generation Based on Bézier Curves for Autonomous Vehicles
 Smooth Path Generation Based on Bézier Curves for Autonomous Vehicles Ji-wung Choi, Renwick E. Curry, Gabriel Hugh Elkaim Abstract In this paper we present two path planning algorithms based on Bézier
Smooth Path Generation Based on Bézier Curves for Autonomous Vehicles Ji-wung Choi, Renwick E. Curry, Gabriel Hugh Elkaim Abstract In this paper we present two path planning algorithms based on Bézier
Cubic Splines; Bézier Curves
 Cubic Splines; Bézier Curves 1 Cubic Splines piecewise approximation with cubic polynomials conditions on the coefficients of the splines 2 Bézier Curves computer-aided design and manufacturing MCS 471
Cubic Splines; Bézier Curves 1 Cubic Splines piecewise approximation with cubic polynomials conditions on the coefficients of the splines 2 Bézier Curves computer-aided design and manufacturing MCS 471
Spiral spline interpolation to a planar spiral
 Spiral spline interpolation to a planar spiral Zulfiqar Habib Department of Mathematics and Computer Science, Graduate School of Science and Engineering, Kagoshima University Manabu Sakai Department of
Spiral spline interpolation to a planar spiral Zulfiqar Habib Department of Mathematics and Computer Science, Graduate School of Science and Engineering, Kagoshima University Manabu Sakai Department of
CMSC427 Geometry and Vectors
 CMSC427 Geometry and Vectors Review: where are we? Parametric curves and Hw1? Going beyond the course: generative art https://www.openprocessing.org Brandon Morse, Art Dept, ART370 Polylines, Processing
CMSC427 Geometry and Vectors Review: where are we? Parametric curves and Hw1? Going beyond the course: generative art https://www.openprocessing.org Brandon Morse, Art Dept, ART370 Polylines, Processing
Lagrange Interpolation and Neville s Algorithm. Ron Goldman Department of Computer Science Rice University
 Lagrange Interpolation and Neville s Algorithm Ron Goldman Department of Computer Science Rice University Tension between Mathematics and Engineering 1. How do Mathematicians actually represent curves
Lagrange Interpolation and Neville s Algorithm Ron Goldman Department of Computer Science Rice University Tension between Mathematics and Engineering 1. How do Mathematicians actually represent curves
Computer Aided Design. B-Splines
 1 Three useful references : R. Bartels, J.C. Beatty, B. A. Barsky, An introduction to Splines for use in Computer Graphics and Geometric Modeling, Morgan Kaufmann Publications,1987 JC.Léon, Modélisation
1 Three useful references : R. Bartels, J.C. Beatty, B. A. Barsky, An introduction to Splines for use in Computer Graphics and Geometric Modeling, Morgan Kaufmann Publications,1987 JC.Léon, Modélisation
Q( t) = T C T =! " t 3,t 2,t,1# Q( t) T = C T T T. Announcements. Bezier Curves and Splines. Review: Third Order Curves. Review: Cubic Examples
 = T C T =! t 3,t 2,t,1# Q( t) T = C T T T. Announcements. Bezier Curves and Splines. Review: Third Order Curves. Review: Cubic Examples") Bezier Curves an Splines December 1, 2015 Announcements PA4 ue one week from toay Submit your most fun test cases, too! Infinitely thin planes with parallel sies μ oesn t matter Term Paper ue one week
Bezier Curves an Splines December 1, 2015 Announcements PA4 ue one week from toay Submit your most fun test cases, too! Infinitely thin planes with parallel sies μ oesn t matter Term Paper ue one week
The degree of the polynomial function is n. We call the term the leading term, and is called the leading coefficient. 0 =
 Math 1310 A polynomial function is a function of the form = + + +...+ + where 0,,,, are real numbers and n is a whole number. The degree of the polynomial function is n. We call the term the leading term,
Math 1310 A polynomial function is a function of the form = + + +...+ + where 0,,,, are real numbers and n is a whole number. The degree of the polynomial function is n. We call the term the leading term,
Geometric Lagrange Interpolation by Planar Cubic Pythagorean-hodograph Curves
 Geometric Lagrange Interpolation by Planar Cubic Pythagorean-hodograph Curves Gašper Jaklič a,c, Jernej Kozak a,b, Marjeta Krajnc b, Vito Vitrih c, Emil Žagar a,b, a FMF, University of Ljubljana, Jadranska
Geometric Lagrange Interpolation by Planar Cubic Pythagorean-hodograph Curves Gašper Jaklič a,c, Jernej Kozak a,b, Marjeta Krajnc b, Vito Vitrih c, Emil Žagar a,b, a FMF, University of Ljubljana, Jadranska
AFFINE COMBINATIONS, BARYCENTRIC COORDINATES, AND CONVEX COMBINATIONS
 On-Line Geometric Modeling Notes AFFINE COMBINATIONS, BARYCENTRIC COORDINATES, AND CONVEX COMBINATIONS Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University
On-Line Geometric Modeling Notes AFFINE COMBINATIONS, BARYCENTRIC COORDINATES, AND CONVEX COMBINATIONS Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University
Midterm 1 Review. Distance = (x 1 x 0 ) 2 + (y 1 y 0 ) 2.
 2 + (y 1 y 0 ) 2.") Midterm 1 Review Comments about the midterm The midterm will consist of five questions and will test on material from the first seven lectures the material given below. No calculus either single variable
Midterm 1 Review Comments about the midterm The midterm will consist of five questions and will test on material from the first seven lectures the material given below. No calculus either single variable
Curve Fitting: Fertilizer, Fonts, and Ferraris
 Curve Fitting: Fertilizer, Fonts, and Ferraris Is that polynomial a model or just a pretty curve? 22 nd CMC3-South Annual Conference March 3, 2007 Anaheim, CA Katherine Yoshiwara Bruce Yoshiwara Los Angeles
Curve Fitting: Fertilizer, Fonts, and Ferraris Is that polynomial a model or just a pretty curve? 22 nd CMC3-South Annual Conference March 3, 2007 Anaheim, CA Katherine Yoshiwara Bruce Yoshiwara Los Angeles
F O R SOCI AL WORK RESE ARCH
 7 TH EUROPE AN CONFERENCE F O R SOCI AL WORK RESE ARCH C h a l l e n g e s i n s o c i a l w o r k r e s e a r c h c o n f l i c t s, b a r r i e r s a n d p o s s i b i l i t i e s i n r e l a t i o n
7 TH EUROPE AN CONFERENCE F O R SOCI AL WORK RESE ARCH C h a l l e n g e s i n s o c i a l w o r k r e s e a r c h c o n f l i c t s, b a r r i e r s a n d p o s s i b i l i t i e s i n r e l a t i o n
Polynomial approximation and Splines
 Polnomial approimation and Splines 1. Weierstrass approimation theorem The basic question we ll look at toda is how to approimate a complicated function f() with a simpler function P () f() P () for eample,
Polnomial approimation and Splines 1. Weierstrass approimation theorem The basic question we ll look at toda is how to approimate a complicated function f() with a simpler function P () f() P () for eample,
MA 323 Geometric Modelling Course Notes: Day 11 Barycentric Coordinates and de Casteljau s algorithm
 MA 323 Geometric Modelling Course Notes: Day 11 Barycentric Coordinates and de Casteljau s algorithm David L. Finn December 16th, 2004 Today, we introduce barycentric coordinates as an alternate to using
MA 323 Geometric Modelling Course Notes: Day 11 Barycentric Coordinates and de Casteljau s algorithm David L. Finn December 16th, 2004 Today, we introduce barycentric coordinates as an alternate to using
Curvature variation minimizing cubic Hermite interpolants
 Curvature variation minimizing cubic Hermite interpolants Gašper Jaklič a,b, Emil Žagar,a a FMF and IMFM, University of Ljubljana, Jadranska 19, Ljubljana, Slovenia b PINT, University of Primorska, Muzejski
Curvature variation minimizing cubic Hermite interpolants Gašper Jaklič a,b, Emil Žagar,a a FMF and IMFM, University of Ljubljana, Jadranska 19, Ljubljana, Slovenia b PINT, University of Primorska, Muzejski
An O(h 2n ) Hermite approximation for conic sections
 Hermite approximation for conic sections") An O(h 2n ) Hermite approximation for conic sections Michael Floater SINTEF P.O. Box 124, Blindern 0314 Oslo, NORWAY November 1994, Revised March 1996 Abstract. Given a segment of a conic section in the
An O(h 2n ) Hermite approximation for conic sections Michael Floater SINTEF P.O. Box 124, Blindern 0314 Oslo, NORWAY November 1994, Revised March 1996 Abstract. Given a segment of a conic section in the
13 Path Planning Cubic Path P 2 P 1. θ 2
 13 Path Planning Path planning includes three tasks: 1 Defining a geometric curve for the end-effector between two points. 2 Defining a rotational motion between two orientations. 3 Defining a time function
13 Path Planning Path planning includes three tasks: 1 Defining a geometric curve for the end-effector between two points. 2 Defining a rotational motion between two orientations. 3 Defining a time function
Visualizing Bezier s curves: some applications of Dynamic System Geogebra
 Visualizing Bezier s curves: some applications of Dynamic System Geogebra Francisco Regis Vieira Alves Instituto Federal de Educação, Ciência e Tecnologia do Estado do Ceará IFCE. Brazil fregis@ifce.edu.br
Visualizing Bezier s curves: some applications of Dynamic System Geogebra Francisco Regis Vieira Alves Instituto Federal de Educação, Ciência e Tecnologia do Estado do Ceará IFCE. Brazil fregis@ifce.edu.br
Engineering 7: Introduction to computer programming for scientists and engineers
 Engineering 7: Introduction to computer programming for scientists and engineers Interpolation Recap Polynomial interpolation Spline interpolation Regression and Interpolation: learning functions from
Engineering 7: Introduction to computer programming for scientists and engineers Interpolation Recap Polynomial interpolation Spline interpolation Regression and Interpolation: learning functions from
G-code and PH curves in CNC Manufacturing
 G-code and PH curves in CNC Manufacturing Zbyněk Šír Institute of Applied Geometry, JKU Linz The research was supported through grant P17387-N12 of the Austrian Science Fund (FWF). Talk overview Motivation
G-code and PH curves in CNC Manufacturing Zbyněk Šír Institute of Applied Geometry, JKU Linz The research was supported through grant P17387-N12 of the Austrian Science Fund (FWF). Talk overview Motivation
Subdivision Matrices and Iterated Function Systems for Parametric Interval Bezier Curves
 International Journal of Video&Image Processing Network Security IJVIPNS-IJENS Vol:7 No:0 Subdivision Matrices Iterated Function Systems for Parametric Interval Bezier Curves O. Ismail, Senior Member,
International Journal of Video&Image Processing Network Security IJVIPNS-IJENS Vol:7 No:0 Subdivision Matrices Iterated Function Systems for Parametric Interval Bezier Curves O. Ismail, Senior Member,
Hermite Interpolation with Euclidean Pythagorean Hodograph Curves
 Hermite Interpolation with Euclidean Pythagorean Hodograph Curves Zbyněk Šír Faculty of Mathematics and Physics, Charles University in Prague Sokolovská 83, 86 75 Praha 8 zbynek.sir@mff.cuni.cz Abstract.
Hermite Interpolation with Euclidean Pythagorean Hodograph Curves Zbyněk Šír Faculty of Mathematics and Physics, Charles University in Prague Sokolovská 83, 86 75 Praha 8 zbynek.sir@mff.cuni.cz Abstract.
Novel polynomial Bernstein bases and Bézier curves based on a general notion of polynomial blossoming
 See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/283943635 Novel polynomial Bernstein bases and Bézier curves based on a general notion of polynomial
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/283943635 Novel polynomial Bernstein bases and Bézier curves based on a general notion of polynomial
Course Notes Math 275 Boise State University. Shari Ultman
 Course Notes Math 275 Boise State University Shari Ultman Fall 2017 Contents 1 Vectors 1 1.1 Introduction to 3-Space & Vectors.............. 3 1.2 Working With Vectors.................... 7 1.3 Introduction
Course Notes Math 275 Boise State University Shari Ultman Fall 2017 Contents 1 Vectors 1 1.1 Introduction to 3-Space & Vectors.............. 3 1.2 Working With Vectors.................... 7 1.3 Introduction
Moving Along a Curve with Specified Speed
 Moving Along a Curve with Specified Speed David Eberly, Geometric Tools, Redmond WA 98052 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International
Moving Along a Curve with Specified Speed David Eberly, Geometric Tools, Redmond WA 98052 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International
Continuous Curvature Path Generation Based on Bézier Curves for Autonomous Vehicles
 Continuous Curvature Path Generation Based on Bézier Curves for Autonomous Vehicles Ji-wung Choi, Renwick E. Curry, Gabriel Hugh Elkaim Abstract In this paper we present two path planning algorithms based
Continuous Curvature Path Generation Based on Bézier Curves for Autonomous Vehicles Ji-wung Choi, Renwick E. Curry, Gabriel Hugh Elkaim Abstract In this paper we present two path planning algorithms based
Self-Influencing Interpolation in Groundwater Flow
 Self-Influencing Interpolation in Groundwater Flow Carolyn Atwood Whitman College Walla Walla, WA Robert Hildebrand University of Puget Sound Tacoma, WA Andrew Homan Ohio Northern University Ada, OH July
Self-Influencing Interpolation in Groundwater Flow Carolyn Atwood Whitman College Walla Walla, WA Robert Hildebrand University of Puget Sound Tacoma, WA Andrew Homan Ohio Northern University Ada, OH July
Math 1310 Section 4.1: Polynomial Functions and Their Graphs. A polynomial function is a function of the form ...
 Math 1310 Section 4.1: Polynomial Functions and Their Graphs A polynomial function is a function of the form... where 0,,,, are real numbers and n is a whole number. The degree of the polynomial function
Math 1310 Section 4.1: Polynomial Functions and Their Graphs A polynomial function is a function of the form... where 0,,,, are real numbers and n is a whole number. The degree of the polynomial function
Limits and Continuity. 2 lim. x x x 3. lim x. lim. sinq. 5. Find the horizontal asymptote (s) of. Summer Packet AP Calculus BC Page 4
 of. Summer Packet AP Calculus BC Page 4") Limits and Continuity t+ 1. lim t - t + 4. lim x x x x + - 9-18 x-. lim x 0 4-x- x 4. sinq lim - q q 5. Find the horizontal asymptote (s) of 7x-18 f ( x) = x+ 8 Summer Packet AP Calculus BC Page 4 6. x
Limits and Continuity t+ 1. lim t - t + 4. lim x x x x + - 9-18 x-. lim x 0 4-x- x 4. sinq lim - q q 5. Find the horizontal asymptote (s) of 7x-18 f ( x) = x+ 8 Summer Packet AP Calculus BC Page 4 6. x
Homework 5: Sampling and Geometry
 Homework 5: Sampling and Geometry Introduction to Computer Graphics and Imaging (Summer 2012), Stanford University Due Monday, August 6, 11:59pm You ll notice that this problem set is a few more pages
Homework 5: Sampling and Geometry Introduction to Computer Graphics and Imaging (Summer 2012), Stanford University Due Monday, August 6, 11:59pm You ll notice that this problem set is a few more pages
Planar interpolation with a pair of rational spirals T. N. T. Goodman 1 and D. S. Meek 2
 Planar interpolation with a pair of rational spirals T N T Goodman and D S Meek Abstract Spirals are curves of one-signed monotone increasing or decreasing curvature Spiral segments are fair curves with
Planar interpolation with a pair of rational spirals T N T Goodman and D S Meek Abstract Spirals are curves of one-signed monotone increasing or decreasing curvature Spiral segments are fair curves with
Characterization of Planar Cubic Alternative curve. Perak, M sia. M sia. Penang, M sia.
 Characterization of Planar Cubic Alternative curve. Azhar Ahmad α, R.Gobithasan γ, Jamaluddin Md.Ali β, α Dept. of Mathematics, Sultan Idris University of Education, 59 Tanjung Malim, Perak, M sia. γ Dept
Characterization of Planar Cubic Alternative curve. Azhar Ahmad α, R.Gobithasan γ, Jamaluddin Md.Ali β, α Dept. of Mathematics, Sultan Idris University of Education, 59 Tanjung Malim, Perak, M sia. γ Dept
Scientific Computing: An Introductory Survey
 Scientific Computing: An Introductory Survey Chapter 7 Interpolation Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
Scientific Computing: An Introductory Survey Chapter 7 Interpolation Prof. Michael T. Heath Department of Computer Science University of Illinois at Urbana-Champaign Copyright c 2002. Reproduction permitted
MA 323 Geometric Modelling Course Notes: Day 20 Curvature and G 2 Bezier splines
 MA 323 Geometric Modelling Course Notes: Day 20 Curvature and G 2 Bezier splines David L. Finn Yesterday, we introduced the notion of curvature and how it plays a role formally in the description of curves,
MA 323 Geometric Modelling Course Notes: Day 20 Curvature and G 2 Bezier splines David L. Finn Yesterday, we introduced the notion of curvature and how it plays a role formally in the description of curves,
Introduction. Chapter Points, Vectors and Coordinate Systems
 Chapter 1 Introduction Computer aided geometric design (CAGD) concerns itself with the mathematical description of shape for use in computer graphics, manufacturing, or analysis. It draws upon the fields
Chapter 1 Introduction Computer aided geometric design (CAGD) concerns itself with the mathematical description of shape for use in computer graphics, manufacturing, or analysis. It draws upon the fields
1 Roots of polynomials
 CS348a: Computer Graphics Handout #18 Geometric Modeling Original Handout #13 Stanford University Tuesday, 9 November 1993 Original Lecture #5: 14th October 1993 Topics: Polynomials Scribe: Mark P Kust
CS348a: Computer Graphics Handout #18 Geometric Modeling Original Handout #13 Stanford University Tuesday, 9 November 1993 Original Lecture #5: 14th October 1993 Topics: Polynomials Scribe: Mark P Kust
Outline. 1 Interpolation. 2 Polynomial Interpolation. 3 Piecewise Polynomial Interpolation
 Outline Interpolation 1 Interpolation 2 3 Michael T. Heath Scientific Computing 2 / 56 Interpolation Motivation Choosing Interpolant Existence and Uniqueness Basic interpolation problem: for given data
Outline Interpolation 1 Interpolation 2 3 Michael T. Heath Scientific Computing 2 / 56 Interpolation Motivation Choosing Interpolant Existence and Uniqueness Basic interpolation problem: for given data
Math 660-Lecture 15: Finite element spaces (I)
") Math 660-Lecture 15: Finite element spaces (I) (Chapter 3, 4.2, 4.3) Before we introduce the concrete spaces, let s first of all introduce the following important lemma. Theorem 1. Let V h consists of
Math 660-Lecture 15: Finite element spaces (I) (Chapter 3, 4.2, 4.3) Before we introduce the concrete spaces, let s first of all introduce the following important lemma. Theorem 1. Let V h consists of
2 The De Casteljau algorithm revisited
 A new geometric algorithm to generate spline curves Rui C. Rodrigues Departamento de Física e Matemática Instituto Superior de Engenharia 3030-199 Coimbra, Portugal ruicr@isec.pt F. Silva Leite Departamento
A new geometric algorithm to generate spline curves Rui C. Rodrigues Departamento de Física e Matemática Instituto Superior de Engenharia 3030-199 Coimbra, Portugal ruicr@isec.pt F. Silva Leite Departamento
R1: Sets A set is a collection of objects sets are written using set brackets each object in onset is called an element or member
 Chapter R Review of basic concepts * R1: Sets A set is a collection of objects sets are written using set brackets each object in onset is called an element or member Ex: Write the set of counting numbers
Chapter R Review of basic concepts * R1: Sets A set is a collection of objects sets are written using set brackets each object in onset is called an element or member Ex: Write the set of counting numbers
A Relationship Between Minimum Bending Energy and Degree Elevation for Bézier Curves
 A Relationship Between Minimum Bending Energy and Degree Elevation for Bézier Curves David Eberly, Geometric Tools, Redmond WA 9852 https://www.geometrictools.com/ This work is licensed under the Creative
A Relationship Between Minimum Bending Energy and Degree Elevation for Bézier Curves David Eberly, Geometric Tools, Redmond WA 9852 https://www.geometrictools.com/ This work is licensed under the Creative
Chapter 4: Interpolation and Approximation. October 28, 2005
 Chapter 4: Interpolation and Approximation October 28, 2005 Outline 1 2.4 Linear Interpolation 2 4.1 Lagrange Interpolation 3 4.2 Newton Interpolation and Divided Differences 4 4.3 Interpolation Error
Chapter 4: Interpolation and Approximation October 28, 2005 Outline 1 2.4 Linear Interpolation 2 4.1 Lagrange Interpolation 3 4.2 Newton Interpolation and Divided Differences 4 4.3 Interpolation Error
Katholieke Universiteit Leuven Department of Computer Science
 Interpolation with quintic Powell-Sabin splines Hendrik Speleers Report TW 583, January 2011 Katholieke Universiteit Leuven Department of Computer Science Celestijnenlaan 200A B-3001 Heverlee (Belgium)
Interpolation with quintic Powell-Sabin splines Hendrik Speleers Report TW 583, January 2011 Katholieke Universiteit Leuven Department of Computer Science Celestijnenlaan 200A B-3001 Heverlee (Belgium)
Chapter 10 Conics, Parametric Equations, and Polar Coordinates Conics and Calculus
 Chapter 10 Conics, Parametric Equations, and Polar Coordinates 10.1 Conics and Calculus 1. Parabola A parabola is the set of all points x, y ( ) that are equidistant from a fixed line and a fixed point
Chapter 10 Conics, Parametric Equations, and Polar Coordinates 10.1 Conics and Calculus 1. Parabola A parabola is the set of all points x, y ( ) that are equidistant from a fixed line and a fixed point
1 Differentiation and polar forms
 CS348a: Computer Graphics Handout #23 Geometric Modeling Original Handout #19 Stanford University Tuesday, 27 October 1992 Original Lecture #8: 27 October 1992 Topics: Joints and Splines via Polar Forms
CS348a: Computer Graphics Handout #23 Geometric Modeling Original Handout #19 Stanford University Tuesday, 27 October 1992 Original Lecture #8: 27 October 1992 Topics: Joints and Splines via Polar Forms
CONTROL POLYGONS FOR CUBIC CURVES
 On-Line Geometric Modeling Notes CONTROL POLYGONS FOR CUBIC CURVES Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University of California, Davis Overview B-Spline
On-Line Geometric Modeling Notes CONTROL POLYGONS FOR CUBIC CURVES Kenneth I. Joy Visualization and Graphics Research Group Department of Computer Science University of California, Davis Overview B-Spline
CHAPTER 3 Describing Relationships
 CHAPTER 3 Describing Relationships 3.1 Scatterplots and Correlation The Practice of Statistics, 5th Edition Starnes, Tabor, Yates, Moore Bedford Freeman Worth Publishers Scatterplots and Correlation Learning
CHAPTER 3 Describing Relationships 3.1 Scatterplots and Correlation The Practice of Statistics, 5th Edition Starnes, Tabor, Yates, Moore Bedford Freeman Worth Publishers Scatterplots and Correlation Learning
Scientific Computing
 2301678 Scientific Computing Chapter 2 Interpolation and Approximation Paisan Nakmahachalasint Paisan.N@chula.ac.th Chapter 2 Interpolation and Approximation p. 1/66 Contents 1. Polynomial interpolation
2301678 Scientific Computing Chapter 2 Interpolation and Approximation Paisan Nakmahachalasint Paisan.N@chula.ac.th Chapter 2 Interpolation and Approximation p. 1/66 Contents 1. Polynomial interpolation
Some notes on Chapter 8: Polynomial and Piecewise-polynomial Interpolation
 Some notes on Chapter 8: Polynomial and Piecewise-polynomial Interpolation See your notes. 1. Lagrange Interpolation (8.2) 1 2. Newton Interpolation (8.3) different form of the same polynomial as Lagrange
Some notes on Chapter 8: Polynomial and Piecewise-polynomial Interpolation See your notes. 1. Lagrange Interpolation (8.2) 1 2. Newton Interpolation (8.3) different form of the same polynomial as Lagrange
Pythagorean-hodograph curves
 1 / 24 Pythagorean-hodograph curves V. Vitrih Raziskovalni matematični seminar 20. 2. 2012 2 / 24 1 2 3 4 5 3 / 24 Let r : [a, b] R 2 be a planar polynomial parametric curve ( ) x(t) r(t) =, y(t) where
1 / 24 Pythagorean-hodograph curves V. Vitrih Raziskovalni matematični seminar 20. 2. 2012 2 / 24 1 2 3 4 5 3 / 24 Let r : [a, b] R 2 be a planar polynomial parametric curve ( ) x(t) r(t) =, y(t) where
Rational Bézier Patch Differentiation using the Rational Forward Difference Operator
 Rational Bézier Patch Differentiation using the Rational Forward Difference Operator Xianming Chen, Richard F. Riesenfeld, Elaine Cohen School of Computing, University of Utah Abstract This paper introduces
Rational Bézier Patch Differentiation using the Rational Forward Difference Operator Xianming Chen, Richard F. Riesenfeld, Elaine Cohen School of Computing, University of Utah Abstract This paper introduces
THEODORE VORONOV DIFFERENTIAL GEOMETRY. Spring 2009
 [under construction] 8 Parallel transport 8.1 Equation of parallel transport Consider a vector bundle E B. We would like to compare vectors belonging to fibers over different points. Recall that this was
[under construction] 8 Parallel transport 8.1 Equation of parallel transport Consider a vector bundle E B. We would like to compare vectors belonging to fibers over different points. Recall that this was
1 f(u)b n i (u)du, (1.1)
b n i (u)du, (1.1)") AMRX Applied Mathematics Research express 25, No. 4 On a Modified Durrmeyer-Bernstein Operator and Applications Germain E. Randriambelosoa 1 Introduction Durrmeyer [6] has introduced a Bernstein-type operator
AMRX Applied Mathematics Research express 25, No. 4 On a Modified Durrmeyer-Bernstein Operator and Applications Germain E. Randriambelosoa 1 Introduction Durrmeyer [6] has introduced a Bernstein-type operator
ab = c a If the coefficients a,b and c are real then either α and β are real or α and β are complex conjugates
 Further Pure Summary Notes. Roots of Quadratic Equations For a quadratic equation ax + bx + c = 0 with roots α and β Sum of the roots Product of roots a + b = b a ab = c a If the coefficients a,b and c
Further Pure Summary Notes. Roots of Quadratic Equations For a quadratic equation ax + bx + c = 0 with roots α and β Sum of the roots Product of roots a + b = b a ab = c a If the coefficients a,b and c
EXPLICIT ERROR BOUND FOR QUADRATIC SPLINE APPROXIMATION OF CUBIC SPLINE
 J. KSIAM Vol.13, No.4, 257 265, 2009 EXPLICIT ERROR BOUND FOR QUADRATIC SPLINE APPROXIMATION OF CUBIC SPLINE YEON SOO KIM 1 AND YOUNG JOON AHN 2 1 DEPT OF MATHEMATICS, AJOU UNIVERSITY, SUWON, 442 749,
J. KSIAM Vol.13, No.4, 257 265, 2009 EXPLICIT ERROR BOUND FOR QUADRATIC SPLINE APPROXIMATION OF CUBIC SPLINE YEON SOO KIM 1 AND YOUNG JOON AHN 2 1 DEPT OF MATHEMATICS, AJOU UNIVERSITY, SUWON, 442 749,
Q(s, t) = S M = S M [ G 1 (t) G 2 (t) G 3 1(t) G 4 (t) ] T
![Q(s, t) = S M = S M [ G 1 (t) G 2 (t) G 3 1(t) G 4 (t) ] T](/thumbs/95/125077833.jpg "Q(s, t) = S M = S M [ G 1 (t) G 2 (t) G 3 1(t) G 4 (t) ] T") Curves an Surfaces: Parametric Bicubic Surfaces - Intro Surfaces are generalizations of curves Use s in place of t in parametric equation: Q(s) = S M G where S equivalent to T in Q(t) = T M G If G is parameterize
Curves an Surfaces: Parametric Bicubic Surfaces - Intro Surfaces are generalizations of curves Use s in place of t in parametric equation: Q(s) = S M G where S equivalent to T in Q(t) = T M G If G is parameterize
VARIATIONAL INTERPOLATION OF SUBSETS
 VARIATIONAL INTERPOLATION OF SUBSETS JOHANNES WALLNER, HELMUT POTTMANN Abstract. We consider the problem of variational interpolation of subsets of Euclidean spaces by curves such that the L 2 norm of
VARIATIONAL INTERPOLATION OF SUBSETS JOHANNES WALLNER, HELMUT POTTMANN Abstract. We consider the problem of variational interpolation of subsets of Euclidean spaces by curves such that the L 2 norm of
MATH Max-min Theory Fall 2016
 MATH 20550 Max-min Theory Fall 2016 1. Definitions and main theorems Max-min theory starts with a function f of a vector variable x and a subset D of the domain of f. So far when we have worked with functions
MATH 20550 Max-min Theory Fall 2016 1. Definitions and main theorems Max-min theory starts with a function f of a vector variable x and a subset D of the domain of f. So far when we have worked with functions
Differentiating Functions & Expressions - Edexcel Past Exam Questions
 - Edecel Past Eam Questions. (a) Differentiate with respect to (i) sin + sec, (ii) { + ln ()}. 5-0 + 9 Given that y =, ¹, ( -) 8 (b) show that = ( -). (6) June 05 Q. f() = e ln, > 0. (a) Differentiate
- Edecel Past Eam Questions. (a) Differentiate with respect to (i) sin + sec, (ii) { + ln ()}. 5-0 + 9 Given that y =, ¹, ( -) 8 (b) show that = ( -). (6) June 05 Q. f() = e ln, > 0. (a) Differentiate
Lec 05 Arithmetic Coding
 ECE 5578 Multimedia Communication Lec 05 Arithmetic Coding Zhu Li Dept of CSEE, UMKC web: http://l.web.umkc.edu/lizhu phone: x2346 Z. Li, Multimedia Communciation, 208 p. Outline Lecture 04 ReCap Arithmetic
ECE 5578 Multimedia Communication Lec 05 Arithmetic Coding Zhu Li Dept of CSEE, UMKC web: http://l.web.umkc.edu/lizhu phone: x2346 Z. Li, Multimedia Communciation, 208 p. Outline Lecture 04 ReCap Arithmetic
() Chapter 8 November 9, / 1
 Chapter 8 November 9, / 1") Example 1: An easy area problem Find the area of the region in the xy-plane bounded above by the graph of f(x) = 2, below by the x-axis, on the left by the line x = 1 and on the right by the line x = 5.
Example 1: An easy area problem Find the area of the region in the xy-plane bounded above by the graph of f(x) = 2, below by the x-axis, on the left by the line x = 1 and on the right by the line x = 5.
MTH301 Calculus II Glossary For Final Term Exam Preparation
 MTH301 Calculus II Glossary For Final Term Exam Preparation Glossary Absolute maximum : The output value of the highest point on a graph over a given input interval or over all possible input values. An
MTH301 Calculus II Glossary For Final Term Exam Preparation Glossary Absolute maximum : The output value of the highest point on a graph over a given input interval or over all possible input values. An
Vector Functions & Space Curves MATH 2110Q
 Vector Functions & Space Curves Vector Functions & Space Curves Vector Functions Definition A vector function or vector-valued function is a function that takes real numbers as inputs and gives vectors
Vector Functions & Space Curves Vector Functions & Space Curves Vector Functions Definition A vector function or vector-valued function is a function that takes real numbers as inputs and gives vectors
Interpolation. 1. Judd, K. Numerical Methods in Economics, Cambridge: MIT Press. Chapter
 Key References: Interpolation 1. Judd, K. Numerical Methods in Economics, Cambridge: MIT Press. Chapter 6. 2. Press, W. et. al. Numerical Recipes in C, Cambridge: Cambridge University Press. Chapter 3
Key References: Interpolation 1. Judd, K. Numerical Methods in Economics, Cambridge: MIT Press. Chapter 6. 2. Press, W. et. al. Numerical Recipes in C, Cambridge: Cambridge University Press. Chapter 3
Intersection of Infinite Cylinders
 Intersection of Infinite Cylinders David Eberly, Geometric Tools, Redmond WA 980 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International License.
Intersection of Infinite Cylinders David Eberly, Geometric Tools, Redmond WA 980 https://www.geometrictools.com/ This work is licensed under the Creative Commons Attribution 4.0 International License.
Section 3.9. The Geometry of Graphs. Difference Equations to Differential Equations
 Difference Equations to Differential Equations Section 3.9 The Geometry of Graphs In Section. we discussed the graph of a function y = f(x) in terms of plotting points (x, f(x)) for many different values
Difference Equations to Differential Equations Section 3.9 The Geometry of Graphs In Section. we discussed the graph of a function y = f(x) in terms of plotting points (x, f(x)) for many different values
Numerical method for approximating the solution of an IVP. Euler Algorithm (the simplest approximation method)
") Section 2.7 Euler s Method (Computer Approximation) Key Terms/ Ideas: Numerical method for approximating the solution of an IVP Linear Approximation; Tangent Line Euler Algorithm (the simplest approximation
Section 2.7 Euler s Method (Computer Approximation) Key Terms/ Ideas: Numerical method for approximating the solution of an IVP Linear Approximation; Tangent Line Euler Algorithm (the simplest approximation
Multidimensional Geometry and its Applications
 PARALLEL COORDINATES : VISUAL Multidimensional Geometry and its Applications Alfred Inselberg( c 99, ) Senior Fellow San Diego SuperComputing Center, CA, USA Computer Science and Applied Mathematics Departments
PARALLEL COORDINATES : VISUAL Multidimensional Geometry and its Applications Alfred Inselberg( c 99, ) Senior Fellow San Diego SuperComputing Center, CA, USA Computer Science and Applied Mathematics Departments
MATH 174: Numerical Analysis I. Math Division, IMSP, UPLB 1 st Sem AY
 MATH 74: Numerical Analysis I Math Division, IMSP, UPLB st Sem AY 0809 Eample : Prepare a table or the unction e or in [0,]. The dierence between adjacent abscissas is h step size. What should be the step
MATH 74: Numerical Analysis I Math Division, IMSP, UPLB st Sem AY 0809 Eample : Prepare a table or the unction e or in [0,]. The dierence between adjacent abscissas is h step size. What should be the step
Introduction. Introduction (2) Easy Problems for Vectors 7/13/2011. Chapter 4. Vector Tools for Graphics
 Easy Problems for Vectors 7/13/2011. Chapter 4. Vector Tools for Graphics") Introduction Chapter 4. Vector Tools for Graphics In computer graphics, we work with objects defined in a three dimensional world (with 2D objects and worlds being just special cases). All objects to be
Introduction Chapter 4. Vector Tools for Graphics In computer graphics, we work with objects defined in a three dimensional world (with 2D objects and worlds being just special cases). All objects to be
GEOMETRIC MODELLING WITH BETA-FUNCTION B-SPLINES, I: PARAMETRIC CURVES
 International Journal of Pure and Applied Mathematics Volume 65 No. 3 2010, 339-360 GEOMETRIC MODELLING WITH BETA-FUNCTION B-SPLINES, I: PARAMETRIC CURVES Arne Lakså 1, Børre Bang 2, Lubomir T. Dechevsky
International Journal of Pure and Applied Mathematics Volume 65 No. 3 2010, 339-360 GEOMETRIC MODELLING WITH BETA-FUNCTION B-SPLINES, I: PARAMETRIC CURVES Arne Lakså 1, Børre Bang 2, Lubomir T. Dechevsky