The wake-sleep algorithm for unsupervised neural networks
|
|
|
- Florence Copeland
- 6 years ago
- Views:
Transcription
1 The wake-sleep algorithm for unsupervised neural networks Geoffrey E Hinton Peter Dayan Brendan J Frey Radford M Neal Department of Computer Science University of Toronto 6 King s College Road Toronto M5S 1A4, Canada 3 rd April 1995 Abstract An unsupervised learning algorithm for a multilayer network of stochastic neurons is described. Bottom-up recognition connections convert the input into representations in successive hidden layers and top-down generative connections reconstruct the representation in one layer from the representation in the layer above. In the wake phase, neurons are driven by recognition connections, and generative connections are adapted to increase the probability that they would reconstruct the correct activity vector in the layer below. In the sleep phase, neurons are driven by generative connections and recognition connections are adapted to increase the probability that they would produce the correct activity vector in the layer above. Supervised learning algorithms for multilayer neural networks face two problems: They require a teacher to specify the desired output of the network and they require some method of communicating error information to all of the connections. The wake-sleep algorithm avoids both these problems. When there is no external teaching signal to be matched, some other goal is required to force the hidden units to extract underlying structure. In the wake-sleep algorithm the goal is to learn representations that are economical to describe but allow the input to be reconstructed accurately. We can quantify this goal by imagining a communication game in which each vector of raw sensory inputs is communicated to a receiver by first sending its hidden representation and then sending the difference between the input vector and its top-down reconstruction from the hidden representation. The aim of learning is to minimize the description length which is the total number of bits that would be required to communicate the input vectors in this way [1]. No communication actually takes place, but minimizing the description length that would be required forces the network to learn economical representations that capture the underlying regularities in the data [2]. 1
2 The neural network has two quite different sets of connections. The bottom-up recognition connections are used to convert the input vector into a representation in one or more layers of hidden units. The top-down generative connections are then used to reconstruct an approximation to the input vector from its underlying representation. The training algorithm for these two sets of connections can be used with many different types of stochastic neuron, but for simplicity we use only stochastic binary units that have states of 1 or 0. The state of unit v is s v and the probability that it is on is: Prob(s v = 1) = exp(;b v ; Pu s u w uv ) (1) where b v is the bias of the unit and w uv is the weight on a connection from unit u. Sometimes the units are driven by the generative weights and other times by the recognition weights, but the same equation is used in both cases (figure 1). In the wake phase the units are driven bottom-up using the recognition weights, producing a representation of the input vector in the first hidden layer, a representation of this representation in the second hidden layer and so on. All of these layers of representation combined are called the total representation of the input, and the binary state of each hidden unit, j, in total representation is s. This j total representation could be used to communicate the input vector, d, to a receiver. According to Shannon s coding theorem, it requires ; log r bits to communicate an event that has probability r under a distribution agreed by the sender and receiver. We assume that the receiver knows the top-down generative weights [3] so these can be used to create the agreed probability distributions required for communication. First, the activity of each unit, k, in the top hidden layer is communicated using the distribution (p 1; k p ) which is obtained by applying Eq. 1 to the single k generative bias weight of unit k. Then the activities of the units in each lower layer are communicated using the distribution (p 1; j p ) obtained by applying Eq. 1 j to the already communicated activities in the layer above, s, and the generative k weights, w kj. The description length of the binary state of unit j is: C(s j )=;s j log p j ; (1 ; s j ) log(1 ; p j ) (2) The description length for input vector d using the total representation is simply the cost of describing all the hidden states in all the hidden layers plus the cost of describing the input vector given the hidden states X X )+X C( d) =C() +C(dj) = C(s j C(s d i j) (3) 2 `L j` i
3 where ` is an index over the L layers of hidden units and i is an index over the input units which have states s d i. Because the hidden units are stochastic, an input vector will not always be represented in the same way. In the wake phase, the recognition weights determine a conditional probability distribution, Q(jd) over total representations. Nevertheless, if the recognition weights are fixed, there is a very simple, on-line method of modifying the generative weights to minimize the expected cost P Q(jd)C( d) of describing the input vector using a stochastically chosen total representation. After using the recognition weights to choose a total representation, each generative weight is adjusted in proportion to the derivative of equation 3 by using the purely local delta rule: w kj = s k (s j ; p j ) (4) where is a learning rate. Although the units are driven by the recognition weights, it is only the generative weights that learn in the wake phase. The learning makes each layer of the total representation better at reconstructing the activities in the layer below. It seems obvious that the recognition weights should be adjusted to maximize the probability of picking the that minimizes C( d). But this is incorrect. When there are many alternative ways of describing an input vector it is possible to design a stochastic coding scheme that takes advantage of the entropy across alternative descriptions [1]. The cost is then: X! X C(d) = Q(jd)C( d) ; ; Q(jd) log Q(jd) (5) The second term is the entropy of the distribution that the recognition weights assign to the various alternative representations. If, for example, there are two alternative representations each of which costs 4 bits, the combined cost is only 3 bits provided we use the two alternatives with equal probability[4]. It is precisely analagous to the way in which the energies of the alternative states of a physical system are combined to yield the Helmholtz free energy of the system. As in physics, C(d) is minimized when the probabilities of the alternatives are exponentially related to their costs by the Boltzmann distribution (at a temperature of 1): P(jd) = exp(;c( d)) P exp(;c( d)) (6) 3
4 So rather than adjusting the recognition weights to focus all of the probability on the lowest cost representation, we should try to make the recognition distribution Q(jd) be as similar as possible to the Boltzmann distribution P(jd) which is the posterior distribution over representations given the data and given the network s generative model. It is exponentially expensive to compute P(jd) exactly [5], but there is a simple way of getting approximately correct target states for the hidden units in order to train the distribution Q(jd) produced by the bottom-up recognition weights. We turn off the recognition weights and drive all of the units in the network using the generative weights, starting at the topmost hidden layer and working down all the way to the input units. Because the units are stochastic, repeating this process typically produces many different fantasy vectors on the input units. These fantasies provide an unbiased sample of the network s generative model of the world. Having produced a fantasy, we then adjust the recognition weights to maximize the log probability of recovering the hidden activities that actually caused the fantasy w jk = s j (s k ; q k ) (7) where specifies the states of both the hidden units and the input units for a particular fantasy and q is the probability that unit k would be turned on by the k recognition weights operating on the binary activities, s, in the layer below [6]. j We call this the sleep phase of the algorithm. Like the wake phase, it uses only locally available information. A potential drawback of the sleep phase is that we would like the recognition weights to be good at recovering the true causes for the training data but the sleep phase optimizes the recognition weights for fantasy data. Early in the learning, fantasies will have a quite different distribution than the training data. The distribution Q(jd) produced by the recognition weights is a factorial distribution in each hidden layer because the recognition weights produce stochastic states of units within a hidden layer that are conditionally independent given the states in the layer below. It is natural to use factorial distributions in a neural net because it allows the probability distribution over the 2 n alternative hidden representations to be specified with n numbers instead of 2 n ; 1. This simplification, however, will typically make it impossible for the distribution Q(jd) to exactly match the posterior distribution P(jd) in equation 6. It makes it impossible, for example, to capture explaining away effects where the activity vector in one layer can be economically explained by activating either unit a or unit b in the layer above but not by activating both of them. 4
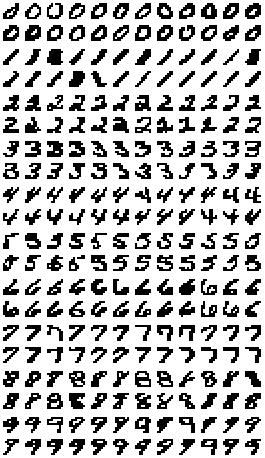
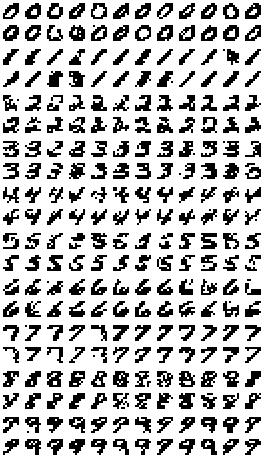
5 The restriction of Q(jd) to a factorial distribution is a potentially very serious limitation. The reason it is not a fatal flaw is that the wake phase of the algorithm adapts the generative weights so as to make P(jd) close to Q(jd), thus limiting the loss caused by the inability of Q(jd) to model non-factorial distributions. To see why this effect occurs it is helpful to rewrite equation 5 in a different form C(d) = X P(jd)C( d) ; ; X P(jd) log P(jd)! + X Q(jd)log Q(jd) P(jd) (8) The first two terms in equation 8 are exactly ; log P(d) under the current generative model. The last term, which cannot be negative, is the Kullback-Leibler divergence between Q(jd) and P(jd) which is the amount by which the description length using Q(jd) exceeds ; log P(d). So for two generative models which assign equal probability to d, minimizing equation 8 with respect to the generative weights will tend to favor the model whose posterior distribution is most similar to Q(jd). Within the available space of generative models, the wake phase seeks out those that give rise to posterior distributions which are approximately factorial. Because we are making several approximations, the algorithm must be evaluated by its performance. Figure 2 shows that it can learn the correct multilayer generative model for a simple toy problem. Moreover, after learning, the Kullback-Leibler divergence in equation 8 is only 0:08 bits which indicates that this term has forced a solution in which the generative model has an almost perfectly factorial posterior. We also tested the algorithm on two quantitative aspects of its capacity to build models of images of highly variable handwritten digits (figure 3a). Learning ten different models, one for each digit, we were able to recognize new digits accurately by seeing which models gave the most economical descriptions of them. Figure 3b shows that after it has learned a digit model, the fantasies generated by the network are very similar to the real data. We also trained a single large network on all the digits and confirmed that it compressed new digits almost as well as did these ten digit-specific networks, and nearly twice as well as a naive code [17]. Two of the most widely used unsupervised training algorithms for neural networks are principal components analysis and competitive learning (sometimes called vector quantization or clustering). They can both be viewed as special cases of the minimum description length approach in which there is only one hidden layer and it is unnecessary to distinguish between the recognition and generative weights because they are always the same [7]. Other learning schemes have been proposed that use separate feedforward and feedback weights [8, 9, 10, 11]. By contrast with Adaptive Resonance Theory [8], the Counter-Streams model [9], and Kawato et al s algorithm [10], the wake-sleep algorithm treats the problem of unsupervised 5
6 learning as statistical one of fitting a generative model which accurately captures the structure in the input examples. Kawato s model is couched in terms of forward and inverse models [12], which are an alternative way to look at our generative and recognition models. The wake-sleep algorithm is closest in spirit to Barlow s ideas about invertible factorial representations [13] and Mumford s proposals [11] for mapping Grenander s generative model approach [14] onto the brain. The minimum description length approach to unsupervised learning was developed to improve the pattern recognition abilities of artificial neural networks but the simplicity of the wake-sleep learning algorithm makes it biologically interesting. For example, Hasselmo [15] has suggested that that cholinergic inputs to the cortex may modulate the degree of feedforward control of ongoing activity. By a curious coincidence, the idea that the perceptual system uses generative models was advocated by Helmholtz, so we call any neural network that fits a generative model to data by minimizing the free energy in Eq. 5 a Helmholtz machine. 6
7 References [1] J Rissanen, Stochastic Complexity in Statistical Inquiry, (World Scientific, Singapore, 1989). [2] The description length can be viewed as an upper bound on the negative log probability of the data given the network s generative model, so this approach is closely related to maximum likelihood methods of fitting models to data. [3] The number of bits required to specify the generative weights should also be included in the description length [1], but we currently ignore it. [4] GE Hinton and RS Zemel, in Advances in Neural Information Processing Systems 6., JD Cowan, G Tesauro and J Alspector, editors, (Morgan Kaufmann, San Mateo, 1994), [5] An unbiased estimate of the exact gradient is easy to obtain, but the noise in this estimate increases with the size of the network. Alternatively, a mean-field approximation can be made to the stochastic recognition model and the error derivatives can then be computed by a backpropagation process (P Dayan, GE Hinton, RM Neal and RS Zemel, Neural Computation, to appear). [6] This performs stochastic steepest descent in the Kullback-Leibler divergences XX +(1 ; p (1 j )log ; p j )=(1 ; qj ) (9) `L j` p j log p j =q j The cost function in equation 5 contains the same terms but with p and q interchanged leading to an approximation error equal to the asymmetry of the Kullback-Leibler divergences. [7] In principal components analysis, the hidden representation vector is a linear function of the input vector and the aim is to minimize the squared reconstruction error. From a description length perspective, the cost of describing the hidden activites is ignored, so only the cost of describing the reconstruction errors needs to be minimized. If these errors are coded using a zero-mean Gaussian, the cost of describing them is proportional to their squared values. In competitive learning, only the hidden unit whose weight vector is most similar to the input vector is activated. The reconstruction is just the weight vector of the winning hidden unit, so minimizing the squared distance between the input vector and the weight vector of the winning hidden unit minimizes the description length of the reconstruction error. [8] G Carpenter and S Grossberg, Computer Vision, Graphics and Image Processing, 37, 54 (1987). 7
8 [9] S Ullman, in Large-Scale Theories of the Cortex, C Koch and J Davis, editors, (MIT Press: Cambridge, MA, 1994). [10] M Kawato, H Hayakama and T Inui, Network, 4, 415, [11] D Mumford, in Large-Scale Theories of the Cortex, C Koch and J Davis, editors, (MIT Press: Cambridge, MA, 1994). [12] MI Jordan and DE Rumelhart, Cognitive Science, 16, 307, [13] HB Barlow, Neural Computation, 1, 295, [14] U Grenander, Lectures in Pattern Theory I, II and III: Pattern Analysis, Pattern Synthesis and Regular Structures, (Springer-Verlag, Berlin, ). [15] ME Hasselmo and JM Bower, Trends in Neurosciences, 16, 218, [16] The learning rates were 0:2 for the generative and recognition weights to and from the input units and 0:001 for the other weights. The generative biases of the first hidden layer started at ;3:00 and all other weights started at 0.0. The final asymmetric divergence between the network s generative model and the real data was 0:10 bits. The penalty term in Eq. 8 was 0:08 bits. [17] The training data was 700 examples of each digit from the CEDAR CDROM 1 made available by the US Postal Service Office of Advanced Technology. Starting with the input layer, each of the ten digit specific networks had a architecture. All weights were started at 0 and the learning rate on all connections was 0:01. Training involved 500 sweeps through the 700 examples. For testing, each net was run 10 times to estimate the expected description length of the image. The single network trained on all the digits had a architecture and was also trained for 500 sweeps through the 7000 examples. Using just the base rates of the individual pixels in the input, the average code length per test digit was 59:0 bits; using the ten digit specific networks, the average length was 33:8 bits, including the 3:3 bits required to specify which model was being used; using the single network, the average length was 37:3 bits. [18] This research was supported by Canadian federal grants from NSERC and IRIS and an Ontario grant from ITRC. GEH is the Noranda fellow of CIAR. 8
9 FIGURE CAPTIONS FIGURE 1: A three-layer Helmholtz machine. The bottom layer represents the raw sensory inputs. Units in layers I, J and K are completely interconnected with recognition (solid lines) and generative (dotted lines) connections. The binary activity of unit j in layer J is s j. q j is determined by the recognition weights and p j is determined by the generative weights. When the units are driven bottom-up, the probability that s j = 1 is q j ; when they are driven top-down, the probability is p j. FIGURE 2: a) A generative model for 4 4 images. The top level decides whether to use vertical or horizontal bars. The next level decides whether or not each possible bar of the chosen orientation should be present in the image. b) A sample of the images produced by the model in (a) with the ambiguous all-white images removed. A neural net with 16 input units, 8 units in the first hidden layer, and 1 hidden unit in the second hidden layer was trained on random examples produced by the generative model. After training [16], the probability distribution produced in the sleep phase was almost exactly correct. c) The generative weights to and from the 8 units in the first hidden layer. Positive weights are white, negative weights are black, and the area is proportional to the magnitude. The largest weight shown is 14:1. The generative bias of the unit is shown on the top right of each block and its generative weight from the single unit in the layer above is shown on the top left. The rightmost block shows the generative biases of the input units. To encourage an easily interpretable solution, the generative weights to the input units were constrained to be positive. If they are allowed to go negative, the algorithm finds solutions that produce the correct distribution but in a much more complicated way, and it requires more units in the second hidden layer. FIGURE 3: Handwritten digits were normalized and quantized to produce 8 8 binary images. 24 examples of each digit are shown on the left. A separate network was trained on each digit class and 24 fantasies from each network are shown on the right. The variations within each digit class are modelled quite well. The error rate was 4.8% when new test images were classified by choosing the network that minimized the description length of the image. On the same data, nearest neighbor classification gave 6.7% errors and backpropagation training of a single supervised net with 10 output units and one hidden layer gave a minimum of 5.6% errors even when we used the test data to optimize the number of hidden units, the training time, and the amount of weight decay [17]. 9
10 layer s k K generative p j s j J recognition q j s i I 10
")
11 a) b) V/H c)
12
Does the Wake-sleep Algorithm Produce Good Density Estimators?
 Does the Wake-sleep Algorithm Produce Good Density Estimators? Brendan J. Frey, Geoffrey E. Hinton Peter Dayan Department of Computer Science Department of Brain and Cognitive Sciences University of Toronto
Does the Wake-sleep Algorithm Produce Good Density Estimators? Brendan J. Frey, Geoffrey E. Hinton Peter Dayan Department of Computer Science Department of Brain and Cognitive Sciences University of Toronto
How to do backpropagation in a brain
 How to do backpropagation in a brain Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto & Google Inc. Prelude I will start with three slides explaining a popular type of deep
How to do backpropagation in a brain Geoffrey Hinton Canadian Institute for Advanced Research & University of Toronto & Google Inc. Prelude I will start with three slides explaining a popular type of deep
Unsupervised Discovery of Nonlinear Structure Using Contrastive Backpropagation
 Cognitive Science 30 (2006) 725 731 Copyright 2006 Cognitive Science Society, Inc. All rights reserved. Unsupervised Discovery of Nonlinear Structure Using Contrastive Backpropagation Geoffrey Hinton,
Cognitive Science 30 (2006) 725 731 Copyright 2006 Cognitive Science Society, Inc. All rights reserved. Unsupervised Discovery of Nonlinear Structure Using Contrastive Backpropagation Geoffrey Hinton,
The simplest kind of unit we consider is a linear-gaussian unit. To
 A HIERARCHICAL COMMUNITY OF EXPERTS GEOFFREY E. HINTON BRIAN SALLANS AND ZOUBIN GHAHRAMANI Department of Computer Science University of Toronto Toronto, Ontario, Canada M5S 3H5 fhinton,sallans,zoubing@cs.toronto.edu
A HIERARCHICAL COMMUNITY OF EXPERTS GEOFFREY E. HINTON BRIAN SALLANS AND ZOUBIN GHAHRAMANI Department of Computer Science University of Toronto Toronto, Ontario, Canada M5S 3H5 fhinton,sallans,zoubing@cs.toronto.edu
Lecture 3a: The Origin of Variational Bayes
 CSC535: 013 Advanced Machine Learning Lecture 3a: The Origin of Variational Bayes Geoffrey Hinton The origin of variational Bayes In variational Bayes, e approximate the true posterior across parameters
CSC535: 013 Advanced Machine Learning Lecture 3a: The Origin of Variational Bayes Geoffrey Hinton The origin of variational Bayes In variational Bayes, e approximate the true posterior across parameters
An efficient way to learn deep generative models
 An efficient way to learn deep generative models Geoffrey Hinton Canadian Institute for Advanced Research & Department of Computer Science University of Toronto Joint work with: Ruslan Salakhutdinov, Yee-Whye
An efficient way to learn deep generative models Geoffrey Hinton Canadian Institute for Advanced Research & Department of Computer Science University of Toronto Joint work with: Ruslan Salakhutdinov, Yee-Whye
Equivalence of Backpropagation and Contrastive Hebbian Learning in a Layered Network
 LETTER Communicated by Geoffrey Hinton Equivalence of Backpropagation and Contrastive Hebbian Learning in a Layered Network Xiaohui Xie xhx@ai.mit.edu Department of Brain and Cognitive Sciences, Massachusetts
LETTER Communicated by Geoffrey Hinton Equivalence of Backpropagation and Contrastive Hebbian Learning in a Layered Network Xiaohui Xie xhx@ai.mit.edu Department of Brain and Cognitive Sciences, Massachusetts
Using Expectation-Maximization for Reinforcement Learning
 NOTE Communicated by Andrew Barto and Michael Jordan Using Expectation-Maximization for Reinforcement Learning Peter Dayan Department of Brain and Cognitive Sciences, Center for Biological and Computational
NOTE Communicated by Andrew Barto and Michael Jordan Using Expectation-Maximization for Reinforcement Learning Peter Dayan Department of Brain and Cognitive Sciences, Center for Biological and Computational
Deep Feedforward Networks. Sargur N. Srihari
 Deep Feedforward Networks Sargur N. srihari@cedar.buffalo.edu 1 Topics Overview 1. Example: Learning XOR 2. Gradient-Based Learning 3. Hidden Units 4. Architecture Design 5. Backpropagation and Other Differentiation
Deep Feedforward Networks Sargur N. srihari@cedar.buffalo.edu 1 Topics Overview 1. Example: Learning XOR 2. Gradient-Based Learning 3. Hidden Units 4. Architecture Design 5. Backpropagation and Other Differentiation
UNSUPERVISED LEARNING
 UNSUPERVISED LEARNING Topics Layer-wise (unsupervised) pre-training Restricted Boltzmann Machines Auto-encoders LAYER-WISE (UNSUPERVISED) PRE-TRAINING Breakthrough in 2006 Layer-wise (unsupervised) pre-training
UNSUPERVISED LEARNING Topics Layer-wise (unsupervised) pre-training Restricted Boltzmann Machines Auto-encoders LAYER-WISE (UNSUPERVISED) PRE-TRAINING Breakthrough in 2006 Layer-wise (unsupervised) pre-training
ECE521 Lectures 9 Fully Connected Neural Networks
 ECE521 Lectures 9 Fully Connected Neural Networks Outline Multi-class classification Learning multi-layer neural networks 2 Measuring distance in probability space We learnt that the squared L2 distance
ECE521 Lectures 9 Fully Connected Neural Networks Outline Multi-class classification Learning multi-layer neural networks 2 Measuring distance in probability space We learnt that the squared L2 distance
Deep unsupervised learning
 Deep unsupervised learning Advanced data-mining Yongdai Kim Department of Statistics, Seoul National University, South Korea Unsupervised learning In machine learning, there are 3 kinds of learning paradigm.
Deep unsupervised learning Advanced data-mining Yongdai Kim Department of Statistics, Seoul National University, South Korea Unsupervised learning In machine learning, there are 3 kinds of learning paradigm.
Knowledge Extraction from DBNs for Images
 Knowledge Extraction from DBNs for Images Son N. Tran and Artur d Avila Garcez Department of Computer Science City University London Contents 1 Introduction 2 Knowledge Extraction from DBNs 3 Experimental
Knowledge Extraction from DBNs for Images Son N. Tran and Artur d Avila Garcez Department of Computer Science City University London Contents 1 Introduction 2 Knowledge Extraction from DBNs 3 Experimental
Neural networks: Unsupervised learning
 Neural networks: Unsupervised learning 1 Previously The supervised learning paradigm: given example inputs x and target outputs t learning the mapping between them the trained network is supposed to give
Neural networks: Unsupervised learning 1 Previously The supervised learning paradigm: given example inputs x and target outputs t learning the mapping between them the trained network is supposed to give
Deep Feedforward Networks
 Deep Feedforward Networks Yongjin Park 1 Goal of Feedforward Networks Deep Feedforward Networks are also called as Feedforward neural networks or Multilayer Perceptrons Their Goal: approximate some function
Deep Feedforward Networks Yongjin Park 1 Goal of Feedforward Networks Deep Feedforward Networks are also called as Feedforward neural networks or Multilayer Perceptrons Their Goal: approximate some function
Lecture 5: Logistic Regression. Neural Networks
 Lecture 5: Logistic Regression. Neural Networks Logistic regression Comparison with generative models Feed-forward neural networks Backpropagation Tricks for training neural networks COMP-652, Lecture
Lecture 5: Logistic Regression. Neural Networks Logistic regression Comparison with generative models Feed-forward neural networks Backpropagation Tricks for training neural networks COMP-652, Lecture
Ways to make neural networks generalize better
 Ways to make neural networks generalize better Seminar in Deep Learning University of Tartu 04 / 10 / 2014 Pihel Saatmann Topics Overview of ways to improve generalization Limiting the size of the weights
Ways to make neural networks generalize better Seminar in Deep Learning University of Tartu 04 / 10 / 2014 Pihel Saatmann Topics Overview of ways to improve generalization Limiting the size of the weights
Introduction to Artificial Neural Networks
 Facultés Universitaires Notre-Dame de la Paix 27 March 2007 Outline 1 Introduction 2 Fundamentals Biological neuron Artificial neuron Artificial Neural Network Outline 3 Single-layer ANN Perceptron Adaline
Facultés Universitaires Notre-Dame de la Paix 27 March 2007 Outline 1 Introduction 2 Fundamentals Biological neuron Artificial neuron Artificial Neural Network Outline 3 Single-layer ANN Perceptron Adaline
Lecture 16 Deep Neural Generative Models
 Lecture 16 Deep Neural Generative Models CMSC 35246: Deep Learning Shubhendu Trivedi & Risi Kondor University of Chicago May 22, 2017 Approach so far: We have considered simple models and then constructed
Lecture 16 Deep Neural Generative Models CMSC 35246: Deep Learning Shubhendu Trivedi & Risi Kondor University of Chicago May 22, 2017 Approach so far: We have considered simple models and then constructed
STA 414/2104: Lecture 8
 STA 414/2104: Lecture 8 6-7 March 2017: Continuous Latent Variable Models, Neural networks With thanks to Russ Salakhutdinov, Jimmy Ba and others Outline Continuous latent variable models Background PCA
STA 414/2104: Lecture 8 6-7 March 2017: Continuous Latent Variable Models, Neural networks With thanks to Russ Salakhutdinov, Jimmy Ba and others Outline Continuous latent variable models Background PCA
Fundamentals of Computational Neuroscience 2e
 Fundamentals of Computational Neuroscience 2e January 1, 2010 Chapter 10: The cognitive brain Hierarchical maps and attentive vision A. Ventral visual pathway B. Layered cortical maps Receptive field size
Fundamentals of Computational Neuroscience 2e January 1, 2010 Chapter 10: The cognitive brain Hierarchical maps and attentive vision A. Ventral visual pathway B. Layered cortical maps Receptive field size
Self Supervised Boosting
 Self Supervised Boosting Max Welling, Richard S. Zemel, and Geoffrey E. Hinton Department of omputer Science University of Toronto 1 King s ollege Road Toronto, M5S 3G5 anada Abstract Boosting algorithms
Self Supervised Boosting Max Welling, Richard S. Zemel, and Geoffrey E. Hinton Department of omputer Science University of Toronto 1 King s ollege Road Toronto, M5S 3G5 anada Abstract Boosting algorithms
arxiv: v1 [stat.ml] 30 Mar 2016
![arxiv: v1 [stat.ml] 30 Mar 2016](/thumbs/90/103262943.jpg "arxiv: v1 [stat.ml] 30 Mar 2016") A latent-observed dissimilarity measure arxiv:1603.09254v1 [stat.ml] 30 Mar 2016 Yasushi Terazono Abstract Quantitatively assessing relationships between latent variables and observed variables is important
A latent-observed dissimilarity measure arxiv:1603.09254v1 [stat.ml] 30 Mar 2016 Yasushi Terazono Abstract Quantitatively assessing relationships between latent variables and observed variables is important
Learning and Memory in Neural Networks
 Learning and Memory in Neural Networks Guy Billings, Neuroinformatics Doctoral Training Centre, The School of Informatics, The University of Edinburgh, UK. Neural networks consist of computational units
Learning and Memory in Neural Networks Guy Billings, Neuroinformatics Doctoral Training Centre, The School of Informatics, The University of Edinburgh, UK. Neural networks consist of computational units
Deep Belief Networks are compact universal approximators
 1 Deep Belief Networks are compact universal approximators Nicolas Le Roux 1, Yoshua Bengio 2 1 Microsoft Research Cambridge 2 University of Montreal Keywords: Deep Belief Networks, Universal Approximation
1 Deep Belief Networks are compact universal approximators Nicolas Le Roux 1, Yoshua Bengio 2 1 Microsoft Research Cambridge 2 University of Montreal Keywords: Deep Belief Networks, Universal Approximation
Modeling High-Dimensional Discrete Data with Multi-Layer Neural Networks
 Modeling High-Dimensional Discrete Data with Multi-Layer Neural Networks Yoshua Bengio Dept. IRO Université de Montréal Montreal, Qc, Canada, H3C 3J7 bengioy@iro.umontreal.ca Samy Bengio IDIAP CP 592,
Modeling High-Dimensional Discrete Data with Multi-Layer Neural Networks Yoshua Bengio Dept. IRO Université de Montréal Montreal, Qc, Canada, H3C 3J7 bengioy@iro.umontreal.ca Samy Bengio IDIAP CP 592,
Course 395: Machine Learning - Lectures
 Course 395: Machine Learning - Lectures Lecture 1-2: Concept Learning (M. Pantic) Lecture 3-4: Decision Trees & CBC Intro (M. Pantic & S. Petridis) Lecture 5-6: Evaluating Hypotheses (S. Petridis) Lecture
Course 395: Machine Learning - Lectures Lecture 1-2: Concept Learning (M. Pantic) Lecture 3-4: Decision Trees & CBC Intro (M. Pantic & S. Petridis) Lecture 5-6: Evaluating Hypotheses (S. Petridis) Lecture
A Coupled Helmholtz Machine for PCA
 A Coupled Helmholtz Machine for PCA Seungjin Choi Department of Computer Science Pohang University of Science and Technology San 3 Hyoja-dong, Nam-gu Pohang 79-784, Korea seungjin@postech.ac.kr August
A Coupled Helmholtz Machine for PCA Seungjin Choi Department of Computer Science Pohang University of Science and Technology San 3 Hyoja-dong, Nam-gu Pohang 79-784, Korea seungjin@postech.ac.kr August
Neural Networks with Applications to Vision and Language. Feedforward Networks. Marco Kuhlmann
 Neural Networks with Applications to Vision and Language Feedforward Networks Marco Kuhlmann Feedforward networks Linear separability x 2 x 2 0 1 0 1 0 0 x 1 1 0 x 1 linearly separable not linearly separable
Neural Networks with Applications to Vision and Language Feedforward Networks Marco Kuhlmann Feedforward networks Linear separability x 2 x 2 0 1 0 1 0 0 x 1 1 0 x 1 linearly separable not linearly separable
Artificial Neural Networks Examination, March 2004
 Artificial Neural Networks Examination, March 2004 Instructions There are SIXTY questions (worth up to 60 marks). The exam mark (maximum 60) will be added to the mark obtained in the laborations (maximum
Artificial Neural Networks Examination, March 2004 Instructions There are SIXTY questions (worth up to 60 marks). The exam mark (maximum 60) will be added to the mark obtained in the laborations (maximum
DETECTING PROCESS STATE CHANGES BY NONLINEAR BLIND SOURCE SEPARATION. Alexandre Iline, Harri Valpola and Erkki Oja
 DETECTING PROCESS STATE CHANGES BY NONLINEAR BLIND SOURCE SEPARATION Alexandre Iline, Harri Valpola and Erkki Oja Laboratory of Computer and Information Science Helsinki University of Technology P.O.Box
DETECTING PROCESS STATE CHANGES BY NONLINEAR BLIND SOURCE SEPARATION Alexandre Iline, Harri Valpola and Erkki Oja Laboratory of Computer and Information Science Helsinki University of Technology P.O.Box
Artificial Neural Networks. Q550: Models in Cognitive Science Lecture 5
 Artificial Neural Networks Q550: Models in Cognitive Science Lecture 5 "Intelligence is 10 million rules." --Doug Lenat The human brain has about 100 billion neurons. With an estimated average of one thousand
Artificial Neural Networks Q550: Models in Cognitive Science Lecture 5 "Intelligence is 10 million rules." --Doug Lenat The human brain has about 100 billion neurons. With an estimated average of one thousand
Weight Quantization for Multi-layer Perceptrons Using Soft Weight Sharing
 Weight Quantization for Multi-layer Perceptrons Using Soft Weight Sharing Fatih Köksal, Ethem Alpaydın, and Günhan Dündar 2 Department of Computer Engineering 2 Department of Electrical and Electronics
Weight Quantization for Multi-layer Perceptrons Using Soft Weight Sharing Fatih Köksal, Ethem Alpaydın, and Günhan Dündar 2 Department of Computer Engineering 2 Department of Electrical and Electronics
Artificial Neural Networks Examination, June 2005
 Artificial Neural Networks Examination, June 2005 Instructions There are SIXTY questions. (The pass mark is 30 out of 60). For each question, please select a maximum of ONE of the given answers (either
Artificial Neural Networks Examination, June 2005 Instructions There are SIXTY questions. (The pass mark is 30 out of 60). For each question, please select a maximum of ONE of the given answers (either
The Origin of Deep Learning. Lili Mou Jan, 2015
 The Origin of Deep Learning Lili Mou Jan, 2015 Acknowledgment Most of the materials come from G. E. Hinton s online course. Outline Introduction Preliminary Boltzmann Machines and RBMs Deep Belief Nets
The Origin of Deep Learning Lili Mou Jan, 2015 Acknowledgment Most of the materials come from G. E. Hinton s online course. Outline Introduction Preliminary Boltzmann Machines and RBMs Deep Belief Nets
Recurrent Neural Networks
 Recurrent Neural Networks Datamining Seminar Kaspar Märtens Karl-Oskar Masing Today's Topics Modeling sequences: a brief overview Training RNNs with back propagation A toy example of training an RNN Why
Recurrent Neural Networks Datamining Seminar Kaspar Märtens Karl-Oskar Masing Today's Topics Modeling sequences: a brief overview Training RNNs with back propagation A toy example of training an RNN Why
Stable Adaptive Momentum for Rapid Online Learning in Nonlinear Systems
 Stable Adaptive Momentum for Rapid Online Learning in Nonlinear Systems Thore Graepel and Nicol N. Schraudolph Institute of Computational Science ETH Zürich, Switzerland {graepel,schraudo}@inf.ethz.ch
Stable Adaptive Momentum for Rapid Online Learning in Nonlinear Systems Thore Graepel and Nicol N. Schraudolph Institute of Computational Science ETH Zürich, Switzerland {graepel,schraudo}@inf.ethz.ch
Neural Networks. Mark van Rossum. January 15, School of Informatics, University of Edinburgh 1 / 28
 1 / 28 Neural Networks Mark van Rossum School of Informatics, University of Edinburgh January 15, 2018 2 / 28 Goals: Understand how (recurrent) networks behave Find a way to teach networks to do a certain
1 / 28 Neural Networks Mark van Rossum School of Informatics, University of Edinburgh January 15, 2018 2 / 28 Goals: Understand how (recurrent) networks behave Find a way to teach networks to do a certain
hidden -> output input -> hidden PCA 1 pruned 2 pruned pruned 6 pruned 7 pruned 8 9 pruned 10 pruned 11 pruned pruned 14 pruned 15
 LOCOCODE PERFORMS NONLINEAR ICA WITHOUT KNOWING THE NUMBER OF SOURCES Sepp Hochreiter Fakultat fur Informatik Technische Universitat Munchen 8090 Munchen, Germany hochreit@informatik.tu-muenchen.de Jurgen
LOCOCODE PERFORMS NONLINEAR ICA WITHOUT KNOWING THE NUMBER OF SOURCES Sepp Hochreiter Fakultat fur Informatik Technische Universitat Munchen 8090 Munchen, Germany hochreit@informatik.tu-muenchen.de Jurgen
Deep Learning Architecture for Univariate Time Series Forecasting
 CS229,Technical Report, 2014 Deep Learning Architecture for Univariate Time Series Forecasting Dmitry Vengertsev 1 Abstract This paper studies the problem of applying machine learning with deep architecture
CS229,Technical Report, 2014 Deep Learning Architecture for Univariate Time Series Forecasting Dmitry Vengertsev 1 Abstract This paper studies the problem of applying machine learning with deep architecture
Helmholtz Machines Memory Fluctuation Dreams
 Helmholtz Machines Memory Fluctuation Dreams Academy of Media Arts, Cologne June 28, 2006 Kevin G. Kirby Evan and Lindsay Stein Professor of Biocomputing Department of Computer Science, Northern Kentucky
Helmholtz Machines Memory Fluctuation Dreams Academy of Media Arts, Cologne June 28, 2006 Kevin G. Kirby Evan and Lindsay Stein Professor of Biocomputing Department of Computer Science, Northern Kentucky
Large-Scale Feature Learning with Spike-and-Slab Sparse Coding
 Large-Scale Feature Learning with Spike-and-Slab Sparse Coding Ian J. Goodfellow, Aaron Courville, Yoshua Bengio ICML 2012 Presented by Xin Yuan January 17, 2013 1 Outline Contributions Spike-and-Slab
Large-Scale Feature Learning with Spike-and-Slab Sparse Coding Ian J. Goodfellow, Aaron Courville, Yoshua Bengio ICML 2012 Presented by Xin Yuan January 17, 2013 1 Outline Contributions Spike-and-Slab
What Do Neural Networks Do? MLP Lecture 3 Multi-layer networks 1
 What Do Neural Networks Do? MLP Lecture 3 Multi-layer networks 1 Multi-layer networks Steve Renals Machine Learning Practical MLP Lecture 3 7 October 2015 MLP Lecture 3 Multi-layer networks 2 What Do Single
What Do Neural Networks Do? MLP Lecture 3 Multi-layer networks 1 Multi-layer networks Steve Renals Machine Learning Practical MLP Lecture 3 7 October 2015 MLP Lecture 3 Multi-layer networks 2 What Do Single
Lecture 7 Artificial neural networks: Supervised learning
 Lecture 7 Artificial neural networks: Supervised learning Introduction, or how the brain works The neuron as a simple computing element The perceptron Multilayer neural networks Accelerated learning in
Lecture 7 Artificial neural networks: Supervised learning Introduction, or how the brain works The neuron as a simple computing element The perceptron Multilayer neural networks Accelerated learning in
Artificial Neural Networks
 Artificial Neural Networks Stephan Dreiseitl University of Applied Sciences Upper Austria at Hagenberg Harvard-MIT Division of Health Sciences and Technology HST.951J: Medical Decision Support Knowledge
Artificial Neural Networks Stephan Dreiseitl University of Applied Sciences Upper Austria at Hagenberg Harvard-MIT Division of Health Sciences and Technology HST.951J: Medical Decision Support Knowledge
The connection of dropout and Bayesian statistics
 The connection of dropout and Bayesian statistics Interpretation of dropout as approximate Bayesian modelling of NN http://mlg.eng.cam.ac.uk/yarin/thesis/thesis.pdf Dropout Geoffrey Hinton Google, University
The connection of dropout and Bayesian statistics Interpretation of dropout as approximate Bayesian modelling of NN http://mlg.eng.cam.ac.uk/yarin/thesis/thesis.pdf Dropout Geoffrey Hinton Google, University
Comparison of Modern Stochastic Optimization Algorithms
 Comparison of Modern Stochastic Optimization Algorithms George Papamakarios December 214 Abstract Gradient-based optimization methods are popular in machine learning applications. In large-scale problems,
Comparison of Modern Stochastic Optimization Algorithms George Papamakarios December 214 Abstract Gradient-based optimization methods are popular in machine learning applications. In large-scale problems,
Neural Networks. Nicholas Ruozzi University of Texas at Dallas
 Neural Networks Nicholas Ruozzi University of Texas at Dallas Handwritten Digit Recognition Given a collection of handwritten digits and their corresponding labels, we d like to be able to correctly classify
Neural Networks Nicholas Ruozzi University of Texas at Dallas Handwritten Digit Recognition Given a collection of handwritten digits and their corresponding labels, we d like to be able to correctly classify
Learning features by contrasting natural images with noise
 Learning features by contrasting natural images with noise Michael Gutmann 1 and Aapo Hyvärinen 12 1 Dept. of Computer Science and HIIT, University of Helsinki, P.O. Box 68, FIN-00014 University of Helsinki,
Learning features by contrasting natural images with noise Michael Gutmann 1 and Aapo Hyvärinen 12 1 Dept. of Computer Science and HIIT, University of Helsinki, P.O. Box 68, FIN-00014 University of Helsinki,
CS 6501: Deep Learning for Computer Graphics. Basics of Neural Networks. Connelly Barnes
 CS 6501: Deep Learning for Computer Graphics Basics of Neural Networks Connelly Barnes Overview Simple neural networks Perceptron Feedforward neural networks Multilayer perceptron and properties Autoencoders
CS 6501: Deep Learning for Computer Graphics Basics of Neural Networks Connelly Barnes Overview Simple neural networks Perceptron Feedforward neural networks Multilayer perceptron and properties Autoencoders
Artificial Intelligence
 Artificial Intelligence Jeff Clune Assistant Professor Evolving Artificial Intelligence Laboratory Announcements Be making progress on your projects! Three Types of Learning Unsupervised Supervised Reinforcement
Artificial Intelligence Jeff Clune Assistant Professor Evolving Artificial Intelligence Laboratory Announcements Be making progress on your projects! Three Types of Learning Unsupervised Supervised Reinforcement
Artificial Neural Network : Training
 Artificial Neural Networ : Training Debasis Samanta IIT Kharagpur debasis.samanta.iitgp@gmail.com 06.04.2018 Debasis Samanta (IIT Kharagpur) Soft Computing Applications 06.04.2018 1 / 49 Learning of neural
Artificial Neural Networ : Training Debasis Samanta IIT Kharagpur debasis.samanta.iitgp@gmail.com 06.04.2018 Debasis Samanta (IIT Kharagpur) Soft Computing Applications 06.04.2018 1 / 49 Learning of neural
Machine Learning Basics
 Security and Fairness of Deep Learning Machine Learning Basics Anupam Datta CMU Spring 2019 Image Classification Image Classification Image classification pipeline Input: A training set of N images, each
Security and Fairness of Deep Learning Machine Learning Basics Anupam Datta CMU Spring 2019 Image Classification Image Classification Image classification pipeline Input: A training set of N images, each
Neural Networks. Chapter 18, Section 7. TB Artificial Intelligence. Slides from AIMA 1/ 21
 Neural Networks Chapter 8, Section 7 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu / 2 Outline Brains Neural networks Perceptrons Multilayer perceptrons Applications of neural
Neural Networks Chapter 8, Section 7 TB Artificial Intelligence Slides from AIMA http://aima.cs.berkeley.edu / 2 Outline Brains Neural networks Perceptrons Multilayer perceptrons Applications of neural
Probabilistic Graphical Models
 10-708 Probabilistic Graphical Models Homework 3 (v1.1.0) Due Apr 14, 7:00 PM Rules: 1. Homework is due on the due date at 7:00 PM. The homework should be submitted via Gradescope. Solution to each problem
10-708 Probabilistic Graphical Models Homework 3 (v1.1.0) Due Apr 14, 7:00 PM Rules: 1. Homework is due on the due date at 7:00 PM. The homework should be submitted via Gradescope. Solution to each problem
Artificial Neural Networks
 Introduction ANN in Action Final Observations Application: Poverty Detection Artificial Neural Networks Alvaro J. Riascos Villegas University of los Andes and Quantil July 6 2018 Artificial Neural Networks
Introduction ANN in Action Final Observations Application: Poverty Detection Artificial Neural Networks Alvaro J. Riascos Villegas University of los Andes and Quantil July 6 2018 Artificial Neural Networks
Neural Networks for Machine Learning. Lecture 11a Hopfield Nets
 Neural Networks for Machine Learning Lecture 11a Hopfield Nets Geoffrey Hinton Nitish Srivastava, Kevin Swersky Tijmen Tieleman Abdel-rahman Mohamed Hopfield Nets A Hopfield net is composed of binary threshold
Neural Networks for Machine Learning Lecture 11a Hopfield Nets Geoffrey Hinton Nitish Srivastava, Kevin Swersky Tijmen Tieleman Abdel-rahman Mohamed Hopfield Nets A Hopfield net is composed of binary threshold
STA 414/2104: Lecture 8
 STA 414/2104: Lecture 8 6-7 March 2017: Continuous Latent Variable Models, Neural networks Delivered by Mark Ebden With thanks to Russ Salakhutdinov, Jimmy Ba and others Outline Continuous latent variable
STA 414/2104: Lecture 8 6-7 March 2017: Continuous Latent Variable Models, Neural networks Delivered by Mark Ebden With thanks to Russ Salakhutdinov, Jimmy Ba and others Outline Continuous latent variable
Artificial Neural Networks Examination, June 2004
 Artificial Neural Networks Examination, June 2004 Instructions There are SIXTY questions (worth up to 60 marks). The exam mark (maximum 60) will be added to the mark obtained in the laborations (maximum
Artificial Neural Networks Examination, June 2004 Instructions There are SIXTY questions (worth up to 60 marks). The exam mark (maximum 60) will be added to the mark obtained in the laborations (maximum
Restricted Boltzmann Machines
 Restricted Boltzmann Machines Boltzmann Machine(BM) A Boltzmann machine extends a stochastic Hopfield network to include hidden units. It has binary (0 or 1) visible vector unit x and hidden (latent) vector
Restricted Boltzmann Machines Boltzmann Machine(BM) A Boltzmann machine extends a stochastic Hopfield network to include hidden units. It has binary (0 or 1) visible vector unit x and hidden (latent) vector
Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function.
 Bayesian learning: Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function. Let y be the true label and y be the predicted
Bayesian learning: Machine learning comes from Bayesian decision theory in statistics. There we want to minimize the expected value of the loss function. Let y be the true label and y be the predicted
Speaker Representation and Verification Part II. by Vasileios Vasilakakis
 Speaker Representation and Verification Part II by Vasileios Vasilakakis Outline -Approaches of Neural Networks in Speaker/Speech Recognition -Feed-Forward Neural Networks -Training with Back-propagation
Speaker Representation and Verification Part II by Vasileios Vasilakakis Outline -Approaches of Neural Networks in Speaker/Speech Recognition -Feed-Forward Neural Networks -Training with Back-propagation
EEE 241: Linear Systems
 EEE 4: Linear Systems Summary # 3: Introduction to artificial neural networks DISTRIBUTED REPRESENTATION An ANN consists of simple processing units communicating with each other. The basic elements of
EEE 4: Linear Systems Summary # 3: Introduction to artificial neural networks DISTRIBUTED REPRESENTATION An ANN consists of simple processing units communicating with each other. The basic elements of
Hierarchy. Will Penny. 24th March Hierarchy. Will Penny. Linear Models. Convergence. Nonlinear Models. References
 24th March 2011 Update Hierarchical Model Rao and Ballard (1999) presented a hierarchical model of visual cortex to show how classical and extra-classical Receptive Field (RF) effects could be explained
24th March 2011 Update Hierarchical Model Rao and Ballard (1999) presented a hierarchical model of visual cortex to show how classical and extra-classical Receptive Field (RF) effects could be explained
Neural Networks for Machine Learning. Lecture 2a An overview of the main types of neural network architecture
 Neural Networks for Machine Learning Lecture 2a An overview of the main types of neural network architecture Geoffrey Hinton with Nitish Srivastava Kevin Swersky Feed-forward neural networks These are
Neural Networks for Machine Learning Lecture 2a An overview of the main types of neural network architecture Geoffrey Hinton with Nitish Srivastava Kevin Swersky Feed-forward neural networks These are
CS 4700: Foundations of Artificial Intelligence
 CS 4700: Foundations of Artificial Intelligence Prof. Bart Selman selman@cs.cornell.edu Machine Learning: Neural Networks R&N 18.7 Intro & perceptron learning 1 2 Neuron: How the brain works # neurons
CS 4700: Foundations of Artificial Intelligence Prof. Bart Selman selman@cs.cornell.edu Machine Learning: Neural Networks R&N 18.7 Intro & perceptron learning 1 2 Neuron: How the brain works # neurons
ARTIFICIAL NEURAL NETWORKS گروه مطالعاتي 17 بهار 92
 ARTIFICIAL NEURAL NETWORKS گروه مطالعاتي 17 بهار 92 BIOLOGICAL INSPIRATIONS Some numbers The human brain contains about 10 billion nerve cells (neurons) Each neuron is connected to the others through 10000
ARTIFICIAL NEURAL NETWORKS گروه مطالعاتي 17 بهار 92 BIOLOGICAL INSPIRATIONS Some numbers The human brain contains about 10 billion nerve cells (neurons) Each neuron is connected to the others through 10000
Deep Neural Networks
 Deep Neural Networks DT2118 Speech and Speaker Recognition Giampiero Salvi KTH/CSC/TMH giampi@kth.se VT 2015 1 / 45 Outline State-to-Output Probability Model Artificial Neural Networks Perceptron Multi
Deep Neural Networks DT2118 Speech and Speaker Recognition Giampiero Salvi KTH/CSC/TMH giampi@kth.se VT 2015 1 / 45 Outline State-to-Output Probability Model Artificial Neural Networks Perceptron Multi
ECE662: Pattern Recognition and Decision Making Processes: HW TWO
 ECE662: Pattern Recognition and Decision Making Processes: HW TWO Purdue University Department of Electrical and Computer Engineering West Lafayette, INDIANA, USA Abstract. In this report experiments are
ECE662: Pattern Recognition and Decision Making Processes: HW TWO Purdue University Department of Electrical and Computer Engineering West Lafayette, INDIANA, USA Abstract. In this report experiments are
Introduction to Neural Networks
 Introduction to Neural Networks What are (Artificial) Neural Networks? Models of the brain and nervous system Highly parallel Process information much more like the brain than a serial computer Learning
Introduction to Neural Networks What are (Artificial) Neural Networks? Models of the brain and nervous system Highly parallel Process information much more like the brain than a serial computer Learning
Introduction To Artificial Neural Networks
 Introduction To Artificial Neural Networks Machine Learning Supervised circle square circle square Unsupervised group these into two categories Supervised Machine Learning Supervised Machine Learning Supervised
Introduction To Artificial Neural Networks Machine Learning Supervised circle square circle square Unsupervised group these into two categories Supervised Machine Learning Supervised Machine Learning Supervised
Deep learning / Ian Goodfellow, Yoshua Bengio and Aaron Courville. - Cambridge, MA ; London, Spis treści
 Deep learning / Ian Goodfellow, Yoshua Bengio and Aaron Courville. - Cambridge, MA ; London, 2017 Spis treści Website Acknowledgments Notation xiii xv xix 1 Introduction 1 1.1 Who Should Read This Book?
Deep learning / Ian Goodfellow, Yoshua Bengio and Aaron Courville. - Cambridge, MA ; London, 2017 Spis treści Website Acknowledgments Notation xiii xv xix 1 Introduction 1 1.1 Who Should Read This Book?
arxiv: v2 [cs.ne] 22 Feb 2013
![arxiv: v2 [cs.ne] 22 Feb 2013](/thumbs/76/74046790.jpg "arxiv: v2 [cs.ne] 22 Feb 2013") Sparse Penalty in Deep Belief Networks: Using the Mixed Norm Constraint arxiv:1301.3533v2 [cs.ne] 22 Feb 2013 Xanadu C. Halkias DYNI, LSIS, Universitè du Sud, Avenue de l Université - BP20132, 83957 LA
Sparse Penalty in Deep Belief Networks: Using the Mixed Norm Constraint arxiv:1301.3533v2 [cs.ne] 22 Feb 2013 Xanadu C. Halkias DYNI, LSIS, Universitè du Sud, Avenue de l Université - BP20132, 83957 LA
Introduction to Machine Learning
 Introduction to Machine Learning Neural Networks Varun Chandola x x 5 Input Outline Contents February 2, 207 Extending Perceptrons 2 Multi Layered Perceptrons 2 2. Generalizing to Multiple Labels.................
Introduction to Machine Learning Neural Networks Varun Chandola x x 5 Input Outline Contents February 2, 207 Extending Perceptrons 2 Multi Layered Perceptrons 2 2. Generalizing to Multiple Labels.................
Loss Functions and Optimization. Lecture 3-1
 Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative: Live Questions We ll use Zoom to take questions from remote students live-streaming the lecture Check Piazza for instructions and
Lecture 3: Loss Functions and Optimization Lecture 3-1 Administrative: Live Questions We ll use Zoom to take questions from remote students live-streaming the lecture Check Piazza for instructions and
Regularization in Neural Networks
 Regularization in Neural Networks Sargur Srihari 1 Topics in Neural Network Regularization What is regularization? Methods 1. Determining optimal number of hidden units 2. Use of regularizer in error function
Regularization in Neural Networks Sargur Srihari 1 Topics in Neural Network Regularization What is regularization? Methods 1. Determining optimal number of hidden units 2. Use of regularizer in error function
A Brief Review of Probability, Bayesian Statistics, and Information Theory
 A Brief Review of Probability, Bayesian Statistics, and Information Theory Brendan Frey Electrical and Computer Engineering University of Toronto frey@psi.toronto.edu http://www.psi.toronto.edu A system
A Brief Review of Probability, Bayesian Statistics, and Information Theory Brendan Frey Electrical and Computer Engineering University of Toronto frey@psi.toronto.edu http://www.psi.toronto.edu A system
Neural networks. Chapter 20. Chapter 20 1
 Neural networks Chapter 20 Chapter 20 1 Outline Brains Neural networks Perceptrons Multilayer networks Applications of neural networks Chapter 20 2 Brains 10 11 neurons of > 20 types, 10 14 synapses, 1ms
Neural networks Chapter 20 Chapter 20 1 Outline Brains Neural networks Perceptrons Multilayer networks Applications of neural networks Chapter 20 2 Brains 10 11 neurons of > 20 types, 10 14 synapses, 1ms
Neural Networks biological neuron artificial neuron 1
 Neural Networks biological neuron artificial neuron 1 A two-layer neural network Output layer (activation represents classification) Weighted connections Hidden layer ( internal representation ) Input
Neural Networks biological neuron artificial neuron 1 A two-layer neural network Output layer (activation represents classification) Weighted connections Hidden layer ( internal representation ) Input
Viewpoint invariant face recognition using independent component analysis and attractor networks
 Viewpoint invariant face recognition using independent component analysis and attractor networks Marian Stewart Bartlett University of California San Diego The Salk Institute La Jolla, CA 92037 marni@salk.edu
Viewpoint invariant face recognition using independent component analysis and attractor networks Marian Stewart Bartlett University of California San Diego The Salk Institute La Jolla, CA 92037 marni@salk.edu
Keywords- Source coding, Huffman encoding, Artificial neural network, Multilayer perceptron, Backpropagation algorithm
 Volume 4, Issue 5, May 2014 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Huffman Encoding
Volume 4, Issue 5, May 2014 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Huffman Encoding
Classification goals: Make 1 guess about the label (Top-1 error) Make 5 guesses about the label (Top-5 error) No Bounding Box
 Make 5 guesses about the label (Top-5 error) No Bounding Box") ImageNet Classification with Deep Convolutional Neural Networks Alex Krizhevsky, Ilya Sutskever, Geoffrey E. Hinton Motivation Classification goals: Make 1 guess about the label (Top-1 error) Make 5 guesses
ImageNet Classification with Deep Convolutional Neural Networks Alex Krizhevsky, Ilya Sutskever, Geoffrey E. Hinton Motivation Classification goals: Make 1 guess about the label (Top-1 error) Make 5 guesses
Neural networks. Chapter 20, Section 5 1
 Neural networks Chapter 20, Section 5 Chapter 20, Section 5 Outline Brains Neural networks Perceptrons Multilayer perceptrons Applications of neural networks Chapter 20, Section 5 2 Brains 0 neurons of
Neural networks Chapter 20, Section 5 Chapter 20, Section 5 Outline Brains Neural networks Perceptrons Multilayer perceptrons Applications of neural networks Chapter 20, Section 5 2 Brains 0 neurons of
AI Programming CS F-20 Neural Networks
 AI Programming CS662-2008F-20 Neural Networks David Galles Department of Computer Science University of San Francisco 20-0: Symbolic AI Most of this class has been focused on Symbolic AI Focus or symbols
AI Programming CS662-2008F-20 Neural Networks David Galles Department of Computer Science University of San Francisco 20-0: Symbolic AI Most of this class has been focused on Symbolic AI Focus or symbols
Experts. Lei Xu. Dept. of Computer Science, The Chinese University of Hong Kong. Dept. of Computer Science. Toronto, M5S 1A4, Canada.
 An Alternative Model for Mixtures of Experts Lei u Dept of Computer Science, The Chinese University of Hong Kong Shatin, Hong Kong, Email lxu@cscuhkhk Michael I Jordan Dept of Brain and Cognitive Sciences
An Alternative Model for Mixtures of Experts Lei u Dept of Computer Science, The Chinese University of Hong Kong Shatin, Hong Kong, Email lxu@cscuhkhk Michael I Jordan Dept of Brain and Cognitive Sciences
Abstract. In this paper we propose recurrent neural networks with feedback into the input
 Recurrent Neural Networks for Missing or Asynchronous Data Yoshua Bengio Dept. Informatique et Recherche Operationnelle Universite de Montreal Montreal, Qc H3C-3J7 bengioy@iro.umontreal.ca Francois Gingras
Recurrent Neural Networks for Missing or Asynchronous Data Yoshua Bengio Dept. Informatique et Recherche Operationnelle Universite de Montreal Montreal, Qc H3C-3J7 bengioy@iro.umontreal.ca Francois Gingras
Lecture 4: Perceptrons and Multilayer Perceptrons
 Lecture 4: Perceptrons and Multilayer Perceptrons Cognitive Systems II - Machine Learning SS 2005 Part I: Basic Approaches of Concept Learning Perceptrons, Artificial Neuronal Networks Lecture 4: Perceptrons
Lecture 4: Perceptrons and Multilayer Perceptrons Cognitive Systems II - Machine Learning SS 2005 Part I: Basic Approaches of Concept Learning Perceptrons, Artificial Neuronal Networks Lecture 4: Perceptrons
Artificial Neural Networks. MGS Lecture 2
 Artificial Neural Networks MGS 2018 - Lecture 2 OVERVIEW Biological Neural Networks Cell Topology: Input, Output, and Hidden Layers Functional description Cost functions Training ANNs Back-Propagation
Artificial Neural Networks MGS 2018 - Lecture 2 OVERVIEW Biological Neural Networks Cell Topology: Input, Output, and Hidden Layers Functional description Cost functions Training ANNs Back-Propagation
Administration. Registration Hw3 is out. Lecture Captioning (Extra-Credit) Scribing lectures. Questions. Due on Thursday 10/6
 Scribing lectures. Questions. Due on Thursday 10/6") Administration Registration Hw3 is out Due on Thursday 10/6 Questions Lecture Captioning (Extra-Credit) Look at Piazza for details Scribing lectures With pay; come talk to me/send email. 1 Projects Projects
Administration Registration Hw3 is out Due on Thursday 10/6 Questions Lecture Captioning (Extra-Credit) Look at Piazza for details Scribing lectures With pay; come talk to me/send email. 1 Projects Projects
Statistical Machine Learning from Data
 January 17, 2006 Samy Bengio Statistical Machine Learning from Data 1 Statistical Machine Learning from Data Multi-Layer Perceptrons Samy Bengio IDIAP Research Institute, Martigny, Switzerland, and Ecole
January 17, 2006 Samy Bengio Statistical Machine Learning from Data 1 Statistical Machine Learning from Data Multi-Layer Perceptrons Samy Bengio IDIAP Research Institute, Martigny, Switzerland, and Ecole
Effect of number of hidden neurons on learning in large-scale layered neural networks
 ICROS-SICE International Joint Conference 009 August 18-1, 009, Fukuoka International Congress Center, Japan Effect of on learning in large-scale layered neural networks Katsunari Shibata (Oita Univ.;
ICROS-SICE International Joint Conference 009 August 18-1, 009, Fukuoka International Congress Center, Japan Effect of on learning in large-scale layered neural networks Katsunari Shibata (Oita Univ.;
Artificial Neural Network Method of Rock Mass Blastability Classification
 Artificial Neural Network Method of Rock Mass Blastability Classification Jiang Han, Xu Weiya, Xie Shouyi Research Institute of Geotechnical Engineering, Hohai University, Nanjing, Jiangshu, P.R.China
Artificial Neural Network Method of Rock Mass Blastability Classification Jiang Han, Xu Weiya, Xie Shouyi Research Institute of Geotechnical Engineering, Hohai University, Nanjing, Jiangshu, P.R.China
CS 4700: Foundations of Artificial Intelligence
 CS 4700: Foundations of Artificial Intelligence Prof. Bart Selman selman@cs.cornell.edu Machine Learning: Neural Networks R&N 18.7 Intro & perceptron learning 1 2 Neuron: How the brain works # neurons
CS 4700: Foundations of Artificial Intelligence Prof. Bart Selman selman@cs.cornell.edu Machine Learning: Neural Networks R&N 18.7 Intro & perceptron learning 1 2 Neuron: How the brain works # neurons
Stochastic Variational Inference for Gaussian Process Latent Variable Models using Back Constraints
 Stochastic Variational Inference for Gaussian Process Latent Variable Models using Back Constraints Thang D. Bui Richard E. Turner tdb40@cam.ac.uk ret26@cam.ac.uk Computational and Biological Learning
Stochastic Variational Inference for Gaussian Process Latent Variable Models using Back Constraints Thang D. Bui Richard E. Turner tdb40@cam.ac.uk ret26@cam.ac.uk Computational and Biological Learning
Data Mining Part 5. Prediction
 Data Mining Part 5. Prediction 5.5. Spring 2010 Instructor: Dr. Masoud Yaghini Outline How the Brain Works Artificial Neural Networks Simple Computing Elements Feed-Forward Networks Perceptrons (Single-layer,
Data Mining Part 5. Prediction 5.5. Spring 2010 Instructor: Dr. Masoud Yaghini Outline How the Brain Works Artificial Neural Networks Simple Computing Elements Feed-Forward Networks Perceptrons (Single-layer,
MODULE -4 BAYEIAN LEARNING
 MODULE -4 BAYEIAN LEARNING CONTENT Introduction Bayes theorem Bayes theorem and concept learning Maximum likelihood and Least Squared Error Hypothesis Maximum likelihood Hypotheses for predicting probabilities
MODULE -4 BAYEIAN LEARNING CONTENT Introduction Bayes theorem Bayes theorem and concept learning Maximum likelihood and Least Squared Error Hypothesis Maximum likelihood Hypotheses for predicting probabilities
Artificial Neural Networks. Historical description
 Artificial Neural Networks Historical description Victor G. Lopez 1 / 23 Artificial Neural Networks (ANN) An artificial neural network is a computational model that attempts to emulate the functions of
Artificial Neural Networks Historical description Victor G. Lopez 1 / 23 Artificial Neural Networks (ANN) An artificial neural network is a computational model that attempts to emulate the functions of
Deep Learning. What Is Deep Learning? The Rise of Deep Learning. Long History (in Hind Sight)
") CSCE 636 Neural Networks Instructor: Yoonsuck Choe Deep Learning What Is Deep Learning? Learning higher level abstractions/representations from data. Motivation: how the brain represents sensory information
CSCE 636 Neural Networks Instructor: Yoonsuck Choe Deep Learning What Is Deep Learning? Learning higher level abstractions/representations from data. Motivation: how the brain represents sensory information
CSC321 Lecture 9: Generalization
 CSC321 Lecture 9: Generalization Roger Grosse Roger Grosse CSC321 Lecture 9: Generalization 1 / 27 Overview We ve focused so far on how to optimize neural nets how to get them to make good predictions
CSC321 Lecture 9: Generalization Roger Grosse Roger Grosse CSC321 Lecture 9: Generalization 1 / 27 Overview We ve focused so far on how to optimize neural nets how to get them to make good predictions
CSE/NB 528 Final Lecture: All Good Things Must. CSE/NB 528: Final Lecture
 CSE/NB 528 Final Lecture: All Good Things Must 1 Course Summary Where have we been? Course Highlights Where do we go from here? Challenges and Open Problems Further Reading 2 What is the neural code? What
CSE/NB 528 Final Lecture: All Good Things Must 1 Course Summary Where have we been? Course Highlights Where do we go from here? Challenges and Open Problems Further Reading 2 What is the neural code? What