Hybrid Control and Switched Systems. Lecture #4 Simulation of hybrid systems
|
|
|
- Valerie Short
- 6 years ago
- Views:
Transcription
1 Hybrid Control and Switched Systems Lecture #4 Simulation of hybrid systems João P. Hespanha University of California at Santa Barbara Summary 1. Numerical simulation of hybrid automata simulations of ODEs zero-crossing detection 2. Simulators Simulink Stateflow SHIFT Modelica 1
2 Numerical simulation of ODEs Initial value problem (IVP) Definition: A signal x : [0,T] R n is a solution to the IVP if x(t) =x 0 + Z t 0 f x(τ) dτ t [0,T] Euler method (first order method): 1st partition interval into N subintervals of length h ú T/N 2nd assume derivative of x constant on each subinterval on each subinterval x is assumed linear x 0 x(t) 0 T t Numerical simulation of ODEs Initial value problem (IVP) Definition: A signal x : [0,T] R n is a solution to the IVP if x(t) =x 0 + Z t 0 f x(τ) dτ t [0,T] Runge-Kutta methods (m-order method): 1st partition interval into N subintervals of length h ú T/N 2nd assume derivative of x constant on each subinterval x 0 x(t) α i, δ i computed assuming a m- order polynomial approximation on each subinterval (truncated Taylor series) 0 T t 2
3 Numerical simulation of ODEs Initial value problem (IVP) Definition: A signal x : [0,T] R n is a solution to the IVP if x(t) =x 0 + Z t Variable-step methods (e.g., Euler): Pick tolerance ε and define t 0 ú 0 choose t k+1 sufficiently close to t k so that 0 f x(τ) dτ Z tk+1 t [0,T] x t k+1 = x(tk)+ f x(τ ))dτ t k x(t k)+(t k+1 t k)f x(t k) Simulation can be both fast and accurate: 1. when f is flat one can advance time fast, 2. when f is steep one advances time slowly (to retain accuracy) Example #1: Bouncing ball y g Free fall Collision c [0,1) energy absorbed at impact x 1 0 & x 2 < 0? t x 2 ú c x 2 linear/polynomial approximations are bad when transitions occur 3

4 Example #1: Bouncing ball x 1 0 & x 2 < 0? x 2 ú c x 2 t ball_nozerocross.mdl Example #1: Bouncing ball t before the transition the linear approximation seems very good so the integration algorithm is fooled into choosing a large integration step 4
5 Zero-crossing detection After a transition is detected, the integration algorithm goes back in time to determine where the transition occurred and starts a new integration step at that point. x 1 0 & x 2 < 0? x 2 ú c x 2 ball_withzerocross.mdl Zero-crossing detection After a transition is detected, the integration algorithm goes back in time to determine where the transition occurred and starts a new integration step at that point. t 5
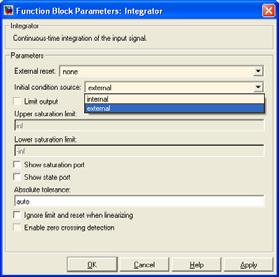
6 Summary 1. Numerical simulation of hybrid automata simulations of ODEs zero-crossing detection 2. Simulators Simulink Stateflow SHIFT Modelica suitable for a small number of discrete modes difficult to recover hybrid automaton from Simulink file good for large numbers of discrete modes and complex transitions poor integration between continuous and discrete very good semantics (easily understandable) poor numerical algorithms very good numerical algorithms very convenient for large models with interconnected components difficult to recover hybrid automaton from simulink file MATLAB s Simulink 1. What you see: graphical user interface to build models of dynamical systems 2. What s behind: numerical solver of ODEs with zero-crossing detection A little history Commercial product developed by MathWorks (founded 1984, flag product is MATLAB/Simulink) MATLAB s Simulink was inspired by MATRIXx s SystemBuild (in 2001 MathWorks bought MATRIXx) 6


7 Simulation of ODEs simple_ode.mdl Simulation of ODEs simple_odex0.mdl 7
8 ODEs with resets (or impulse systems) Q R n f : R n R n ϕ R n ρ : R n R n set of discrete states continuous state-space vector field transition set reset map x ϕ? E.g., bouncing ball x ú ρ(q 1,x ) x 1 0 & x 2 < 0? x 2 ú c x 2 Q R n f : R n R n ϕ R n ρ : R n R n Simulation of ODEs with resets set of discrete states continuous state-space vector field transition set reset map x ϕ? x ú ρ(q 1,x ) integrator with reset (by default does zero-crossing detection on reset input) 8


 Example")
9 Q R n f : R n R n ϕ R n ρ : R n R n Example #1: Bouncing ball set of discrete states continuous state-space vector field transition set reset map x 1 0 & x 2 < 0? x 2 ú c x 2 integrator with reset (by default does zero-crossing detection on reset input) Example #1: Bouncing ball ball_withzerocross.mdl 9
 x(t k-1 ) The reset pulse is not really instantaneous (may lead to problems for Zeno systems)")
10 Q R n f : R n R n ϕ R n ρ : R n R n Simulation of ODEs with resets x 1 0 & x 2 < 0? set of discrete states continuous state-space vector field transition set reset map x 2 ú c x 2 x(t k ) x(t k-1 ) The reset pulse is not really instantaneous (may lead to problems for Zeno systems) Example #1: Bouncing ball fails to catch the rising edge of the reset trigger and the ball falls ball_withzerocross.mdl 10
11 Simulation of hybrid automaton (no resets) Q set of discrete states R n continuous state-space f : Q R n R n vector field ϕ : Q R n Q discrete transition ϕ(q 1,x ) = q 2? mode q 2 mode q 1 mode q 3 E.g., thermostat x mean temperature room ϕ(q 1,x ) = q 3? x 73? q = 1 q = 2 heater x 77? Simulation of hybrid automaton (no resets) Q set of discrete states R n continuous state-space f : Q R n R n vector field ϕ : Q R n Q discrete transition mode q 2 ϕ(q 1,x ) = q 2? mode q 1 Q R 11



12 Example #2: Thermostat x mean temperature room x 73? q = 1 q = 2 heater x 77? Example #2: Thermostat thermostat.mdl 12
13 Simulation of hybrid automaton Q set of discrete states R n continuous state-space f : Q R n R n vector field ϕ : Q R n Q discrete transition ρ : Q R n R n reset map x ú ρ(q 1,x ) mode q 2 ϕ(q 1,x ) = q 2? mode q 1 mode q 3 ϕ(q 1,x ) = q 3? x ú ρ(q 1,x ) Simulation of hybrid automaton Q set of discrete states R n continuous state-space f : Q R n R n vector field ϕ : Q R n Q discrete transition ρ : Q R n R n reset map x ú ρ(q 1,x ) mode q 2 ϕ(q 1,x ) = q 2? mode q 1 13


 τ ú 0 τ ú 0 wait to on (q = 2) τ.5?")
14 Example #5: Tank system pump pump-on inflow λ = 3 constant outflow μ = 1 y goal prevent the tank from emptying or filling up δ =.5 delay between command is sent to pump and the time it is executed y 1? pump off (q = 1) τ.5? wait to off (q = 4) τ ú 0 τ ú 0 wait to on (q = 2) τ.5? pump on (q = 3) y 2? Example #5: Tank system tank.mdl 14
15 Stateflow Q set of discrete states R n continuous state-space f : Q R n R n vector field ϕ : Q R n Q discrete transition mode q 2 ϕ(q 1,x ) = q 2? mode q 1 Simulink (continuous dynamics): generates continuous state Stateflow (discrete dyn.): generates discrete state & events (e.g., resets) signals & events Simulation of hybrid automaton Q set of discrete states R n continuous state-space f : Q R n R n vector field ϕ : Q R n Q discrete transition ρ : Q R n R n reset map x ú ρ(q 1,x ) mode q 2 ϕ(q 1,x ) = q 2? mode q 1 replaced by StateFlow chart 15

16 Simulation of hybrid automaton Q set of discrete states R n continuous state-space f : Q R n R n vector field ϕ : Q R n Q discrete transition ρ : Q R n R n reset map x ú ρ(q 1,x ) mode q 2 ϕ(q 1,x ) = q 2? mode q 1 pump off wait to off wait to on pump on Example #5: Tank system Stateflow does not automatically does zero crossing detection, which must be done manually tank_sf_withzerocross.mdl 16
 1. Simulation Language for Hybrid Automaton 2.")
 Advantages: 1.")
")
17 Example #5: Tank system Stateflow does not automatically does zero crossing detection, which must be done manually tank_sf_nozerocross.mdl SHIFT (Hybrid System Tool Interchange Format) 1. Simulation Language for Hybrid Automaton 2. Developed at UC Berkeley under the PATH (Partners for Advance Transit and Highways) project to simulate Automated Highway Systems 3. PATH provides freeware to compile SHIFT into a C-based simulator ( ) Advantages: 1. Syntax matches very closely the hybrid automata formalism 2. Object-oriented and scalable (multiple copies of a automata can be created, connected, disconnected, and destroyed as the simulation runs) Problems: 1. Currently the simulation engine is poor (limited integration algorithms, no zero-crossing detection) 2. Still in the development stages 17
18 A SHIFT program type AutomataType { // declaration of automata types } input state output export discrete transition setup // declaration of input signals // declaration of internal states // declaration of output signals // declaration of events for synchronization // declaration of discrete modes // & corresponding continuous dynamics // definition of transition rules // initializations global setup // declaration of global Automata // creation and initialization of global Automata Example #2: Thermostat x mean temperature room x 73? q = 1 q = 2 heater x 77? thermostat.hs type ThermostatType { state continuous number x := 50; discrete first declared is the initial mode heater_off { x = -x + 50; }, heater_on { x = -x + 100; }; transition heater_off -> heater_on {} when { x<= 73}, heater_on -> heater_off {} when { x>= 77}; } global ThermostatType thermostat; setup define { thermostat := create(thermostattype, x:= 60); } declaration of the ThermostatType type declaration of a variable called thermostat of type ThermostatType creation (and initialization) of the hybrid automaton 18
19 Example #7: Server system with control incoming rate r q max q Additive increase/multiplicative decrease control (AIMD): while q < q max increase r linearly when q reaches q max instantaneously multiply r by m (0,1) queue dynamics q q max? server B rate of service (bandwidth) controller q(t) r ú mr t Example #7: Server system with control q max incoming rate r server B rate of service (bandwidth) q queue dynamics variable r controller q q max? queue-full event queue-full r > 1 queue-full r ú m r synchronized transitions (all guards must hold for transition to occur) 19
20 Example #7: Server system with control controller r > 1 queue-full r ú m r.hs type CongestionControllerType { output continuous number r := 0; state number m := 0.5; // multiplicative decrease (parameter) export queue_full; discrete additive_increase { r = 1; } } transition additive_increase -> additive_increase { queue_full } when { r > 1 } do { r := m * r; } synchronization event jump condition reset Example #7: Server system with control queue dynamics r > B? empty q q max, r > B? normal queue-full full q 0, r < B? type QueueType { input continuous number r := 0; state continuous number q := 0; state CongestionControllerType controller; r < B? // controller to synchronize with.hs state number B := 1; state number qmax := 10; // Bandwidth (parameter) // Maximum queue size (parameter) discrete empty_queue { q = 0; } full_queue { q = 0; } normal { q = r - B; } } transition empty_queue -> normal {} when { r > B }, full_queue -> normal {} when { r < B }; normal -> empty_queue {} when { q <= 0 and r <= B ) do { q = 0; }, normal -> full_queue { controller:queue_full } when { q >= Qmax and r>b ) do { q = qmax; }, 20
21 Example #7: Server system with control queue dynamics variable r event queue_full controller.hs global QueueType queue; global CongestionControllerType contr; setup define { contr := create(congestioncontrollertype); queue := create(queuetype, controller := contr); } connect { r(queue) <- r(contr); } declaration of global variables creation (and initialization) of the hybrid automata inputs output connections Example #10: Server with multiple controllers incoming rates r 1 q max r 2 controller 1 queue_full controller 2 q r 1 r2 server queue dynamics B rate of service (bandwidth) 21
22 Example #10: Server with multiple controllers controller 1 controller 2 queue_full type QueueType { input continuous number r1 := 0; input continuous number r2 := 0; state continuous number r := 0; state continuous number q := 0; state set(congestioncontrollertype) controllers; r 1 queue dynamics r2 state number B := 1; state number qmax := 10; discrete empty_queue { q = 0; r = r1 + r2; } full_queue { q = 0; r = r1 + r2; } normal { q = r - B; r = r1 + r2; } // Bandwidth (parameter) // Maximum queue size (parameter) 2.hs } transition empty_queue -> normal {} when { r > B }, full_queue -> normal {} when { r < B }; normal -> empty_queue {} when { q <= 0 and r <= B ) do { q = 0; }, normal -> full_queue { controllers:queue_full(all) } when { q >= Qmax and r>b ) do { q = qmax; }, Example #10: Server with multiple controllers controller 1 r 1 queue_full controller 2 r2 global QueueType queue; global CongestionControllerType contr1; global CongestionControllerType contr2; setup define { contr1 := create(congestioncontrollertype, r := 1.5); contr2 := create(congestioncontrollertype, r := 2.0); queue := create(queuetype, controllers := {contr1,contr2} ); } connect { } r1(queue) <- r(contr1); r2(queue) <- r(contr2); queue dynamics declaration of global variables 2.hs creation (and initialization) of the hybrid automata inputs output connections 22
 http://www.modelica.org/ 3.")
23 Modelica 1. Object-oriented language for modeling physical systems 2. Developed and promoted by the Modelica Association (international non-profit, non-governmental organization based in Sweden) 3. Dynasim AB sells Dymola, currently the best Modelica simulator (interfaces with MATLAB and Simulink) Advantages: 1. Object-oriented and scalable 2. Large number of component libraries available (electric circuits, mechanical system, thermo-hydraulics, power systems, robotics, petri-nets, etc.) 3. Numerically stable simulation engine (allows differential algebraic equations, automatic zero-crossing detection) 4. Heavily used in industry, especially in Europe 5. UCSB has a site license! Problems: 1. Not as widely known as MATLAB/Simulink Modelica object model ModelName // declarations of public variables (inputs and outputs) that // can be accessed using ModelName.Variable name TypeName VariableName; protected // declarations of internal (hidden) variables (state) TypeName VariableName; equation // algebraic and differential equations Expression = Expression; end ModelName 23
24 Modelica 101 Predefined types Real x, // x is a real number y (start = 1.1, unit = inches ) height ; // y is a height, initialized with 1.1 inches Integer n; // n is an integer Boolean p; // p can be either true or false Type modifiers parameter Real B; // B does not change during the simulation but // can be initialized with different values constant Real PI; // PI is a fixed constant discrete Real q; // q is a piecewise constant variable (discrete state) flow Real r; // r is a flow variable // (connection of flows follow conservation law, // by convention positive means flow enters component) Modelica 101 Predefined functions/variables for use in equation der(x) // derivative of Real signal x pre(x) // left-limit of discrete signal x edge(x) // true when discrete variable x is discontinuous time // simulation time Commands for use in equation x = y // equate two variable x + z = y // (should be interpreted as equation and not assignment) reinit(x, 2.1); // reset variable x to to 2.1 connect(x,y); // connects variables: connect(x,z); // x = y = z (or x + y + z = 0 in case of flows) when p then // execute command when p becomes true command; end when; 24


 and x <= xon then")
; // no change der(x) = if q then 100-x")

25 Example #2: Thermostat x mean temperature room x 73? q = false q = true heater model thermostat Real x Boolean q(start = false) x 77? "Average temperature"; "Heater state"; parameter Real xon = 73 "Turn-on temperature"; parameter Real xoff = 77 "Turn-off temperature"; equation q = if not pre(q) and x <= xon then true // turn on else if pre(q) and x >= xoff then false // turn off else pre(q); // no change der(x) = if q then 100-x else 50-x; end thermostat; thermostat.mo Example #2: Thermostat To get started: setenv PATH /usr/local/dymola/bin:$path dymola5 thermostat.mo [documentation online & refs 15,16] 25
26 Example #7: Server system with control incoming rate r queue dynamics q q max? q max server B rate of service (bandwidth) q variable r controller queue-full event queue-full queue-full? r ú m r NOT synchronized transitions Example #7: Server system with control controller queue-full r ú m r model Controller Real r(start=0) discrete Boolean queue_full parameter Real a=.1 parameter Real m=.5 "out-flow"; "Queue full"; "Additive constant"; "Multiplicative constant"; equation der(r) = a; when pre(queue_full) then reinit(r, r*m); end when; end Controller.mo 26
27 Example #7: Server system with control queue dynamics r > B? empty q q max, r > B? normal queue-full full model Queue Real r "In-flow"; q 0, r < B? discrete Boolean queue_full(start=false) "Queue full"; parameter Real B=1 "Bandwidth"; parameter Real Qmax=1 "Max queue size"; r < B? protected discrete Integer status(start=0) "Queue status"; // 0 empty, 1 normal, 2 full Real q(start=0) "Queue size"; equation status = if pre(status) == 0 and r > B then 1 // no longer empty else if pre(status) == 2 and r < B then 1 // no longer full else if pre(status) == 1 and q <= 0 and r < B then 0 // became empty else if pre(status) == 1 and q >= Qmax and r > B then 2 // became full else pre(status); // no change queue_full = pre(status) == 1 and status == 2; der(q) = if status == 1 then r - B else 0; end Queue.mo Example #7: Server system with control queue dynamics r queue_full controller model System Queue queue; Controller contr; equation queue.r = contr.r; queue.queue_full = contr.queue_full; end System.mo 27



28 Example #7: Server system with control.mo Example #10: Server with multiple controllers incoming rates r 1 q max r 2 controller 1 queue_full controller 2 q r 1 r2 server queue dynamics B rate of service (bandwidth) 2.mo 28




29 Example #10: Server with multiple controllers controller 1 queue_full controller 2 r 1 r2 model System Queue queue; Controller contr1; Controller contr2; queue dynamics equation queue.r = contr1.r + contr2.r; queue.queue_full = contr1.queue_full; queue.queue_full = contr2.queue_full; end System 2.mo Example #10: Server with multiple controllers 2.mo 2.mo 29

")
30 Example #10: Server with multiple controllers see 3.mo for the use of the connect command 3.mo Interfacing Dymola & MATLAB/Simulink Sharing data Each time you simulate a Dymola model, a file xxxx.mat is created with all the data. You can get this data into MATLAB with load xxxx.mat Using Dymola models in Simulink Add dymola to the MATLAB path: path('/usr/local/dymola/mfiles',path) path('/usr/local/dymola/mfiles/traj',path) The Simulink block /usr/local/dymola/mfiles/dymolablockmaster.mdl can be used to insert a Dymola system into a Simulink diagram Not sure if its working? 30
31 Next class Properties of hybrid systems Safety (reachability) Liveness Asymptotic properties (stability) 31
Hybrid Control and Switched Systems. Lecture #1 Hybrid systems are everywhere: Examples
 Hybrid Control and Switched Systems Lecture #1 Hybrid systems are everywhere: Examples João P. Hespanha University of California at Santa Barbara Summary Examples of hybrid systems 1. Bouncing ball 2.
Hybrid Control and Switched Systems Lecture #1 Hybrid systems are everywhere: Examples João P. Hespanha University of California at Santa Barbara Summary Examples of hybrid systems 1. Bouncing ball 2.
Hybrid Control and Switched Systems. Lecture #8 Stability and convergence of hybrid systems (topological view)
") Hybrid Control and Switched Systems Lecture #8 Stability and convergence of hybrid systems (topological view) João P. Hespanha University of California at Santa Barbara Summary Lyapunov stability of hybrid
Hybrid Control and Switched Systems Lecture #8 Stability and convergence of hybrid systems (topological view) João P. Hespanha University of California at Santa Barbara Summary Lyapunov stability of hybrid
Hybrid Control and Switched Systems. Lecture #9 Analysis tools for hybrid systems: Impact maps
 Hybrid Control and Switched Systems Lecture #9 Analysis tools for hybrid systems: Impact maps João P. Hespanha University of California at Santa Barbara Summary Analysis tools for hybrid systems Impact
Hybrid Control and Switched Systems Lecture #9 Analysis tools for hybrid systems: Impact maps João P. Hespanha University of California at Santa Barbara Summary Analysis tools for hybrid systems Impact
Embedded Systems 5. Synchronous Composition. Lee/Seshia Section 6.2
 Embedded Systems 5-1 - Synchronous Composition Lee/Seshia Section 6.2 Important semantic model for concurrent composition Here: composition of actors Foundation of Statecharts, Simulink, synchronous programming
Embedded Systems 5-1 - Synchronous Composition Lee/Seshia Section 6.2 Important semantic model for concurrent composition Here: composition of actors Foundation of Statecharts, Simulink, synchronous programming
Stochastic Hybrid Systems: Applications to Communication Networks
 research supported by NSF Stochastic Hybrid Systems: Applications to Communication Networks João P. Hespanha Center for Control Engineering and Computation University of California at Santa Barbara Deterministic
research supported by NSF Stochastic Hybrid Systems: Applications to Communication Networks João P. Hespanha Center for Control Engineering and Computation University of California at Santa Barbara Deterministic
Course on Hybrid Systems
 Course on Hybrid Systems Maria Prandini Politecnico di Milano, Italy Organizer and lecturer: Maria Prandini Politecnico di Milano, Italy maria.prandini@polimi.it Additional lecturers: CONTACT INFO Goran
Course on Hybrid Systems Maria Prandini Politecnico di Milano, Italy Organizer and lecturer: Maria Prandini Politecnico di Milano, Italy maria.prandini@polimi.it Additional lecturers: CONTACT INFO Goran
Embedded Systems 2. REVIEW: Actor models. A system is a function that accepts an input signal and yields an output signal.
 Embedded Systems 2 REVIEW: Actor models A system is a function that accepts an input signal and yields an output signal. The domain and range of the system function are sets of signals, which themselves
Embedded Systems 2 REVIEW: Actor models A system is a function that accepts an input signal and yields an output signal. The domain and range of the system function are sets of signals, which themselves
Hybrid Systems - Lecture n. 3 Lyapunov stability
 OUTLINE Focus: stability of equilibrium point Hybrid Systems - Lecture n. 3 Lyapunov stability Maria Prandini DEI - Politecnico di Milano E-mail: prandini@elet.polimi.it continuous systems decribed by
OUTLINE Focus: stability of equilibrium point Hybrid Systems - Lecture n. 3 Lyapunov stability Maria Prandini DEI - Politecnico di Milano E-mail: prandini@elet.polimi.it continuous systems decribed by
Hybrid systems and computer science a short tutorial
 Hybrid systems and computer science a short tutorial Eugene Asarin Université Paris 7 - LIAFA SFM 04 - RT, Bertinoro p. 1/4 Introductory equations Hybrid Systems = Discrete+Continuous SFM 04 - RT, Bertinoro
Hybrid systems and computer science a short tutorial Eugene Asarin Université Paris 7 - LIAFA SFM 04 - RT, Bertinoro p. 1/4 Introductory equations Hybrid Systems = Discrete+Continuous SFM 04 - RT, Bertinoro
EE 144/244: Fundamental Algorithms for System Modeling, Analysis, and Optimization Fall 2016
 EE 144/244: Fundamental Algorithms for System Modeling, Analysis, and Optimization Fall 2016 Discrete Event Simulation Stavros Tripakis University of California, Berkeley Stavros Tripakis (UC Berkeley)
EE 144/244: Fundamental Algorithms for System Modeling, Analysis, and Optimization Fall 2016 Discrete Event Simulation Stavros Tripakis University of California, Berkeley Stavros Tripakis (UC Berkeley)
Simulation of Vehicle Drivetrain with Modelica
 Simulation of Vehicle Drivetrain with Modelica Dynamic Simulation in Vehicle Engineering 2012 Anton Haumer 1 Contents Modeling language Modelica Simulation tool Dymola SmartElectricDrives Library PowerTrain
Simulation of Vehicle Drivetrain with Modelica Dynamic Simulation in Vehicle Engineering 2012 Anton Haumer 1 Contents Modeling language Modelica Simulation tool Dymola SmartElectricDrives Library PowerTrain
Hybrid Control and Switched Systems. Lecture #2 How to describe a hybrid system? Formal models for hybrid system
 Hyrid Control nd Switched Systems Lecture #2 How to descrie hyrid system? Forml models for hyrid system João P. Hespnh University of Cliforni t Snt Brr Summry. Forml models for hyrid systems: Finite utomt
Hyrid Control nd Switched Systems Lecture #2 How to descrie hyrid system? Forml models for hyrid system João P. Hespnh University of Cliforni t Snt Brr Summry. Forml models for hyrid systems: Finite utomt
EECS 144/244: System Modeling, Analysis, and Optimization
 EECS 144/244: System Modeling, Analysis, and Optimization Continuous Systems Lecture: Hybrid Systems Alexandre Donzé University of California, Berkeley April 5, 2013 Alexandre Donzé: EECS 144/244 Hybrid
EECS 144/244: System Modeling, Analysis, and Optimization Continuous Systems Lecture: Hybrid Systems Alexandre Donzé University of California, Berkeley April 5, 2013 Alexandre Donzé: EECS 144/244 Hybrid
Hybrid Systems Modeling, Analysis and Control
 Hybrid Systems Modeling, Analysis and Control Radu Grosu Vienna University of Technology Lecture 6 Continuous AND Discrete Systems Control Theory Continuous systems approximation, stability control, robustness
Hybrid Systems Modeling, Analysis and Control Radu Grosu Vienna University of Technology Lecture 6 Continuous AND Discrete Systems Control Theory Continuous systems approximation, stability control, robustness
EE291E Lecture Notes 3 Autonomous Hybrid Automata
 EE9E Lecture Notes 3 Autonomous Hybrid Automata Claire J. Tomlin January, 8 The lecture notes for this course are based on the first draft of a research monograph: Hybrid Systems. The monograph is copyright
EE9E Lecture Notes 3 Autonomous Hybrid Automata Claire J. Tomlin January, 8 The lecture notes for this course are based on the first draft of a research monograph: Hybrid Systems. The monograph is copyright
Controlo Switched Systems: Mixing Logic with Differential Equations. João P. Hespanha. University of California at Santa Barbara.
 Controlo 00 5 th Portuguese Conference on Automatic Control University of Aveiro,, September 5-7, 5 00 Switched Systems: Mixing Logic with Differential Equations João P. Hespanha University of California
Controlo 00 5 th Portuguese Conference on Automatic Control University of Aveiro,, September 5-7, 5 00 Switched Systems: Mixing Logic with Differential Equations João P. Hespanha University of California
Synchronous languages and their extension to deal with discrete and continuous-time systems
 Synchronous languages and their extension to deal with discrete and continuous-time systems Marc Pouzet École normale supérieure MPRI, November 14, 2017 1 / 77 Current Practice Hybrid Systems Modelers
Synchronous languages and their extension to deal with discrete and continuous-time systems Marc Pouzet École normale supérieure MPRI, November 14, 2017 1 / 77 Current Practice Hybrid Systems Modelers
Hybrid Systems Course Lyapunov stability
 Hybrid Systems Course Lyapunov stability OUTLINE Focus: stability of an equilibrium point continuous systems decribed by ordinary differential equations (brief review) hybrid automata OUTLINE Focus: stability
Hybrid Systems Course Lyapunov stability OUTLINE Focus: stability of an equilibrium point continuous systems decribed by ordinary differential equations (brief review) hybrid automata OUTLINE Focus: stability
Modelica An Object-Oriented Language for Physical System Modeling
 Modelica An Object-Oriented Language for Physical System Modeling by Steven Xu Feb 19, 2003 Overview The Modelica design was initiated by Hilding Elmqvist in Sept. 1996 Has been designed by the developers
Modelica An Object-Oriented Language for Physical System Modeling by Steven Xu Feb 19, 2003 Overview The Modelica design was initiated by Hilding Elmqvist in Sept. 1996 Has been designed by the developers
Using the Principles of Synchronous Languages in Discrete-event and Continuous-time Models
 Using the Principles of Synchronous Languages in Discrete-event and Continuous-time Models Edward A. Lee Robert S. Pepper Distinguished Professor Chair of EECS UC Berkeley With special thanks to Stephen
Using the Principles of Synchronous Languages in Discrete-event and Continuous-time Models Edward A. Lee Robert S. Pepper Distinguished Professor Chair of EECS UC Berkeley With special thanks to Stephen
Symbolic Verification of Hybrid Systems: An Algebraic Approach
 European Journal of Control (2001)71±16 # 2001 EUCA Symbolic Verification of Hybrid Systems An Algebraic Approach Martin v. Mohrenschildt Department of Computing and Software, Faculty of Engineering, McMaster
European Journal of Control (2001)71±16 # 2001 EUCA Symbolic Verification of Hybrid Systems An Algebraic Approach Martin v. Mohrenschildt Department of Computing and Software, Faculty of Engineering, McMaster
Hybrid Control and Switched Systems. Lecture #6 Reachability
 Hbrid Control and Switched Stem Lecture #6 Reachabilit João P. Hepanha Univerit of California at Santa Barbara Summar Review of previou lecture Reachabilit tranition tem reachabilit algorithm backward
Hbrid Control and Switched Stem Lecture #6 Reachabilit João P. Hepanha Univerit of California at Santa Barbara Summar Review of previou lecture Reachabilit tranition tem reachabilit algorithm backward
Index Reduction and Discontinuity Handling using Substitute Equations
 Mathematical and Computer Modelling of Dynamical Systems, vol. 7, nr. 2, 2001, 173-187. Index Reduction and Discontinuity Handling using Substitute Equations G. Fábián, D.A. van Beek, J.E. Rooda Abstract
Mathematical and Computer Modelling of Dynamical Systems, vol. 7, nr. 2, 2001, 173-187. Index Reduction and Discontinuity Handling using Substitute Equations G. Fábián, D.A. van Beek, J.E. Rooda Abstract
An introduction to Uppaal and Timed Automata MVP5 1
 An introduction to Uppaal and Timed Automata MVP5 1 What is Uppaal? (http://www.uppaal.com/) A simple graphical interface for drawing extended finite state machines (automatons + shared variables A graphical
An introduction to Uppaal and Timed Automata MVP5 1 What is Uppaal? (http://www.uppaal.com/) A simple graphical interface for drawing extended finite state machines (automatons + shared variables A graphical
Analysis of a Boost Converter Circuit Using Linear Hybrid Automata
 Analysis of a Boost Converter Circuit Using Linear Hybrid Automata Ulrich Kühne LSV ENS de Cachan, 94235 Cachan Cedex, France, kuehne@lsv.ens-cachan.fr 1 Introduction Boost converter circuits are an important
Analysis of a Boost Converter Circuit Using Linear Hybrid Automata Ulrich Kühne LSV ENS de Cachan, 94235 Cachan Cedex, France, kuehne@lsv.ens-cachan.fr 1 Introduction Boost converter circuits are an important
Cyber-Physical Systems Modeling and Simulation of Hybrid Systems
 Cyber-Physical Systems Modeling and Simulation of Hybrid Systems Matthias Althoff TU München 05. June 2015 Matthias Althoff Modeling and Simulation of Hybrid Systems 05. June 2015 1 / 28 Overview Overview
Cyber-Physical Systems Modeling and Simulation of Hybrid Systems Matthias Althoff TU München 05. June 2015 Matthias Althoff Modeling and Simulation of Hybrid Systems 05. June 2015 1 / 28 Overview Overview
Hybrid Control and Switched Systems. Lecture #3 What can go wrong? Trajectories of hybrid systems
 Hybrid Conrol and Swiched Sysems Lecure #3 Wha can go wrong? Trajecories of hybrid sysems João P. Hespanha Universiy of California a Sana Barbara Summary 1. Trajecories of hybrid sysems: Soluion o a hybrid
Hybrid Conrol and Swiched Sysems Lecure #3 Wha can go wrong? Trajecories of hybrid sysems João P. Hespanha Universiy of California a Sana Barbara Summary 1. Trajecories of hybrid sysems: Soluion o a hybrid
Switched Systems: Mixing Logic with Differential Equations
 research supported by NSF Switched Systems: Mixing Logic with Differential Equations João P. Hespanha Center for Control Dynamical Systems and Computation Outline Logic-based switched systems framework
research supported by NSF Switched Systems: Mixing Logic with Differential Equations João P. Hespanha Center for Control Dynamical Systems and Computation Outline Logic-based switched systems framework
Discontinuous Systems
 Discontinuous Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Simple Examples Bouncing ball Heating system Gearbox/cruise control Simulating Hybrid Systems
Discontinuous Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline Simple Examples Bouncing ball Heating system Gearbox/cruise control Simulating Hybrid Systems
Using the Principles of Synchronous Languages in Discrete-event and Continuous-time Models
 Using the Principles of Synchronous Languages in Discrete-event and Continuous-time Models Edward A. Lee Robert S. Pepper Distinguished Professor Chair of EECS UC Berkeley With special thanks to Xioajun
Using the Principles of Synchronous Languages in Discrete-event and Continuous-time Models Edward A. Lee Robert S. Pepper Distinguished Professor Chair of EECS UC Berkeley With special thanks to Xioajun
Stochastic Hybrid Systems: Modeling, analysis, and applications to networks and biology
 research supported by NSF Stochastic Hybrid Systems: Modeling, analysis, and applications to networks and biology João P. Hespanha Center for Control Engineering and Computation University of California
research supported by NSF Stochastic Hybrid Systems: Modeling, analysis, and applications to networks and biology João P. Hespanha Center for Control Engineering and Computation University of California
Timed Automata VINO 2011
 Timed Automata VINO 2011 VeriDis Group - LORIA July 18, 2011 Content 1 Introduction 2 Timed Automata 3 Networks of timed automata Motivation Formalism for modeling and verification of real-time systems.
Timed Automata VINO 2011 VeriDis Group - LORIA July 18, 2011 Content 1 Introduction 2 Timed Automata 3 Networks of timed automata Motivation Formalism for modeling and verification of real-time systems.
Stochastic Hybrid Systems: Applications to Communication Networks
 research supported by NSF Stochastic Hybrid Systems: Applications to Communication Networks João P. Hespanha Center for Control Engineering and Computation University of California at Santa Barbara Talk
research supported by NSF Stochastic Hybrid Systems: Applications to Communication Networks João P. Hespanha Center for Control Engineering and Computation University of California at Santa Barbara Talk
An Introduction to Hybrid Systems Modeling
 CS620, IIT BOMBAY An Introduction to Hybrid Systems Modeling Ashutosh Trivedi Department of Computer Science and Engineering, IIT Bombay CS620: New Trends in IT: Modeling and Verification of Cyber-Physical
CS620, IIT BOMBAY An Introduction to Hybrid Systems Modeling Ashutosh Trivedi Department of Computer Science and Engineering, IIT Bombay CS620: New Trends in IT: Modeling and Verification of Cyber-Physical
Specification and Validation of gproms Semantics
 Specification and Validation of gproms Semantics Damian Nadales Agut Martin Hüfner Michel Reniers gproms is an equation-based modeling language and tool for complex, controlled, hybrid systems, which focuses
Specification and Validation of gproms Semantics Damian Nadales Agut Martin Hüfner Michel Reniers gproms is an equation-based modeling language and tool for complex, controlled, hybrid systems, which focuses
Index Theory and Structural Analysis for multi-mode DAE Systems
 Index Theory and Structural Analysis for multi-mode DAE Systems Albert Benveniste Benoît Caillaud Khalil Ghorbal (Inria, Rennes) Marc Pouzet (ENS, Paris) Hilding Elmqvist (Mogram, Lund) Martin Otter (DRL,
Index Theory and Structural Analysis for multi-mode DAE Systems Albert Benveniste Benoît Caillaud Khalil Ghorbal (Inria, Rennes) Marc Pouzet (ENS, Paris) Hilding Elmqvist (Mogram, Lund) Martin Otter (DRL,
Hybrid Control and Switched Systems. Lecture #7 Stability and convergence of ODEs
 Hybrid Control and Switched Systems Lecture #7 Stability and convergence of ODEs João P. Hespanha University of California at Santa Barbara Summary Lyapunov stability of ODEs epsilon-delta and beta-function
Hybrid Control and Switched Systems Lecture #7 Stability and convergence of ODEs João P. Hespanha University of California at Santa Barbara Summary Lyapunov stability of ODEs epsilon-delta and beta-function
Using Simulink to analyze 2 degrees of freedom system
 Using Simulink to analyze 2 degrees of freedom system Nasser M. Abbasi Spring 29 page compiled on June 29, 25 at 4:2pm Abstract A two degrees of freedom system consisting of two masses connected by springs
Using Simulink to analyze 2 degrees of freedom system Nasser M. Abbasi Spring 29 page compiled on June 29, 25 at 4:2pm Abstract A two degrees of freedom system consisting of two masses connected by springs
A Stand Alone Quantized State System Solver for Continuous System Simulation
 A Stand Alone Quantized State System Solver for Continuous System Simulation Joaquín Fernández and Ernesto Kofman CIFASIS CONICET. FCEIA - UNR. 27 de febrero 210 bis - (S2000EZP) Rosario, Argentina Phone:
A Stand Alone Quantized State System Solver for Continuous System Simulation Joaquín Fernández and Ernesto Kofman CIFASIS CONICET. FCEIA - UNR. 27 de febrero 210 bis - (S2000EZP) Rosario, Argentina Phone:
Physics 584 Computational Methods
 Physics 584 Computational Methods Introduction to Matlab and Numerical Solutions to Ordinary Differential Equations Ryan Ogliore April 18 th, 2016 Lecture Outline Introduction to Matlab Numerical Solutions
Physics 584 Computational Methods Introduction to Matlab and Numerical Solutions to Ordinary Differential Equations Ryan Ogliore April 18 th, 2016 Lecture Outline Introduction to Matlab Numerical Solutions
HYBRID AND SWITCHED SYSTEMS ECE229 WINTER 2004
 HYBRID AND SWITCHED SYSTEMS ECE229 WINTER 2004 Course description As computers, digital networks, and embedded systems become ubiquitous and increasingly complex, one needs to understand the coupling between
HYBRID AND SWITCHED SYSTEMS ECE229 WINTER 2004 Course description As computers, digital networks, and embedded systems become ubiquitous and increasingly complex, one needs to understand the coupling between
Towards a Mechanised Denotational Semantics for Modelica
 Towards a Mechanised Denotational Semantics for Modelica Simon Foster Bernhard Thiele Jim Woodcock Peter Fritzson Department of Computer Science, University of York PELAB, Linköping University 3rd February
Towards a Mechanised Denotational Semantics for Modelica Simon Foster Bernhard Thiele Jim Woodcock Peter Fritzson Department of Computer Science, University of York PELAB, Linköping University 3rd February
YTÜ Mechanical Engineering Department
 YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Report
YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Report
Verification of analog and mixed-signal circuits using hybrid systems techniques
 FMCAD, November 2004, Austin Verification of analog and mixed-signal circuits using hybrid systems techniques Thao Dang, Alexandre Donze, Oded Maler VERIMAG Grenoble, France Plan 1. Introduction 2. Verification
FMCAD, November 2004, Austin Verification of analog and mixed-signal circuits using hybrid systems techniques Thao Dang, Alexandre Donze, Oded Maler VERIMAG Grenoble, France Plan 1. Introduction 2. Verification
Co-simulation of embedded systems: a PVS-Simulink integrated environment
 Co-simulation of embedded systems: a PVS-Simulink integrated environment Cinzia Bernardeschi 1 Andrea Domenici 1 Paolo Masci 2 1 Department of Information Engineering, University of Pisa 2 INESC-TEC and
Co-simulation of embedded systems: a PVS-Simulink integrated environment Cinzia Bernardeschi 1 Andrea Domenici 1 Paolo Masci 2 1 Department of Information Engineering, University of Pisa 2 INESC-TEC and
0 t < 0 1 t 1. u(t) =
 =") A. M. Niknejad University of California, Berkeley EE 100 / 42 Lecture 13 p. 22/33 Step Response A unit step function is described by u(t) = ( 0 t < 0 1 t 1 While the waveform has an artificial jump (difficult
A. M. Niknejad University of California, Berkeley EE 100 / 42 Lecture 13 p. 22/33 Step Response A unit step function is described by u(t) = ( 0 t < 0 1 t 1 While the waveform has an artificial jump (difficult
Multivariable Control Laboratory experiment 2 The Quadruple Tank 1
 Multivariable Control Laboratory experiment 2 The Quadruple Tank 1 Department of Automatic Control Lund Institute of Technology 1. Introduction The aim of this laboratory exercise is to study some different
Multivariable Control Laboratory experiment 2 The Quadruple Tank 1 Department of Automatic Control Lund Institute of Technology 1. Introduction The aim of this laboratory exercise is to study some different
Operational Semantics of Hybrid Systems
 Operational Semantics of Hybrid Systems Edward A. Lee and Haiyang Zheng Center for Hybrid and Embedded Software Systems (CHESS) University of California, Berkeley, 94720, USA eal@eecs.berkeley.edu, hyzheng@eecs.berkeley.edu
Operational Semantics of Hybrid Systems Edward A. Lee and Haiyang Zheng Center for Hybrid and Embedded Software Systems (CHESS) University of California, Berkeley, 94720, USA eal@eecs.berkeley.edu, hyzheng@eecs.berkeley.edu
Verification of Hybrid Systems with Ariadne
 Verification of Hybrid Systems with Ariadne Davide Bresolin 1 Luca Geretti 2 Tiziano Villa 3 1 University of Bologna 2 University of Udine 3 University of Verona An open workshop on Formal Methods for
Verification of Hybrid Systems with Ariadne Davide Bresolin 1 Luca Geretti 2 Tiziano Villa 3 1 University of Bologna 2 University of Udine 3 University of Verona An open workshop on Formal Methods for
Multibody System Dynamics: MBDyn Hydraulics Modeling
 Multibody System Dynamics: MBDyn Hydraulics Modeling Pierangelo Masarati Politecnico di Milano Dipartimento di Scienze e Tecnologie Aerospaziali Outline 2 Introduction Modeling
Multibody System Dynamics: MBDyn Hydraulics Modeling Pierangelo Masarati Politecnico di Milano Dipartimento di Scienze e Tecnologie Aerospaziali Outline 2 Introduction Modeling
Numerical Methods - Boundary Value Problems for ODEs
 Numerical Methods - Boundary Value Problems for ODEs Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Boundary Value Problems for ODEs 2013 1 / 14 Outline 1 Boundary Value
Numerical Methods - Boundary Value Problems for ODEs Y. K. Goh Universiti Tunku Abdul Rahman 2013 Y. K. Goh (UTAR) Numerical Methods - Boundary Value Problems for ODEs 2013 1 / 14 Outline 1 Boundary Value
Interchange Semantics For Hybrid System Models
 Interchange Semantics For Hybrid System Models Alessandro Pinto 1, Luca P. Carloni 2, Roberto Passerone 3 and Alberto Sangiovanni-Vincentelli 1 1 University of California at Berkeley apinto,alberto@eecs.berkeley.edu
Interchange Semantics For Hybrid System Models Alessandro Pinto 1, Luca P. Carloni 2, Roberto Passerone 3 and Alberto Sangiovanni-Vincentelli 1 1 University of California at Berkeley apinto,alberto@eecs.berkeley.edu
HRML: a hybrid relational modelling language. He Jifeng
 HRML: a hybrid relational modelling language He Jifeng Hybrid Systems Systems are composed by continuous physical component and discrete control component The system state evoles over time according to
HRML: a hybrid relational modelling language He Jifeng Hybrid Systems Systems are composed by continuous physical component and discrete control component The system state evoles over time according to
Discrete Event Systems Exam
 Computer Engineering and Networks Laboratory TEC, NSG, DISCO HS 2016 Prof. L. Thiele, Prof. L. Vanbever, Prof. R. Wattenhofer Discrete Event Systems Exam Friday, 3 rd February 2017, 14:00 16:00. Do not
Computer Engineering and Networks Laboratory TEC, NSG, DISCO HS 2016 Prof. L. Thiele, Prof. L. Vanbever, Prof. R. Wattenhofer Discrete Event Systems Exam Friday, 3 rd February 2017, 14:00 16:00. Do not
Modeling and Verifying a Temperature Control System using Continuous Action Systems
 Modeling and Verifying a Temperature Control System using Continuous Action Systems Ralph-Johan Back Cristina Cerschi Turku Centre for Computer Science (TUCS), Lemminkäisenkatu 14 A, FIN-20520, Turku,
Modeling and Verifying a Temperature Control System using Continuous Action Systems Ralph-Johan Back Cristina Cerschi Turku Centre for Computer Science (TUCS), Lemminkäisenkatu 14 A, FIN-20520, Turku,
EE 144/244: Fundamental Algorithms for System Modeling, Analysis, and Optimization Fall 2014
 EE 144/244: Fundamental Algorithms for System Modeling, Analysis, and Optimization Fall 2014 Discrete Event Simulation Stavros Tripakis University of California, Berkeley Stavros Tripakis (UC Berkeley)
EE 144/244: Fundamental Algorithms for System Modeling, Analysis, and Optimization Fall 2014 Discrete Event Simulation Stavros Tripakis University of California, Berkeley Stavros Tripakis (UC Berkeley)
Proving Safety Properties of the Steam Boiler Controller. Abstract
 Formal Methods for Industrial Applications: A Case Study Gunter Leeb leeb@auto.tuwien.ac.at Vienna University of Technology Department for Automation Treitlstr. 3, A-1040 Vienna, Austria Abstract Nancy
Formal Methods for Industrial Applications: A Case Study Gunter Leeb leeb@auto.tuwien.ac.at Vienna University of Technology Department for Automation Treitlstr. 3, A-1040 Vienna, Austria Abstract Nancy
HybridSAL Relational Abstracter
 HybridSAL Relational Abstracter Ashish Tiwari SRI International, Menlo Park, CA. ashish.tiwari@sri.com Abstract. In this paper, we present the HybridSAL relational abstracter a tool for verifying continuous
HybridSAL Relational Abstracter Ashish Tiwari SRI International, Menlo Park, CA. ashish.tiwari@sri.com Abstract. In this paper, we present the HybridSAL relational abstracter a tool for verifying continuous
Hybrid Control and Switched Systems. Lecture #11 Stability of switched system: Arbitrary switching
 Hybrid Control and Switched Systems Lecture #11 Stability of switched system: Arbitrary switching João P. Hespanha University of California at Santa Barbara Stability under arbitrary switching Instability
Hybrid Control and Switched Systems Lecture #11 Stability of switched system: Arbitrary switching João P. Hespanha University of California at Santa Barbara Stability under arbitrary switching Instability
Hybrid Systems. April 2012 Kazunori Ueda, Waseda University and NII (with thanks to my students) Computer Software, Vol.28, No.1 (2011), pp
 Computer Software, Vol.28, No.1 (2011), pp") HydLa: A High Level Language for Hybrid Systems April 2012 Kazunori Ueda, Waseda University and NII (with thanks to my students) Computer Software, Vol.28, No.1 (2011), pp.306 311. Research Groups and
HydLa: A High Level Language for Hybrid Systems April 2012 Kazunori Ueda, Waseda University and NII (with thanks to my students) Computer Software, Vol.28, No.1 (2011), pp.306 311. Research Groups and
Graphical User Interfaces for Emittance and Correlation Plot. Henrik Loos
 Graphical User Interfaces for Emittance and Correlation Plot Common GUI Features Overview Files Configs Measure Data Point Export Common GUI Features Save Saves the present data. Auto-generated file name
Graphical User Interfaces for Emittance and Correlation Plot Common GUI Features Overview Files Configs Measure Data Point Export Common GUI Features Save Saves the present data. Auto-generated file name
Synchronous languages and their extension to deal with discrete and continuous-time systems
 Synchronous languages and their extension to deal with discrete and continuous-time systems Marc Pouzet École normale supérieure MPRI, 27 October 2015 1 / 63 Current Practice Hybrid Systems Modelers Some
Synchronous languages and their extension to deal with discrete and continuous-time systems Marc Pouzet École normale supérieure MPRI, 27 October 2015 1 / 63 Current Practice Hybrid Systems Modelers Some
Efficient Simulation of Hybrid Systems: A Hybrid Bond Graph Approach
 Efficient Simulation of Hybrid Systems: A Hybrid Bond Graph Approach Indranil Roychoudhury, Matthew J. Daigle, Gautam Biswas, and Xenofon Koutsoukos SGT Inc., NASA Ames Research Center, Moffett Field,
Efficient Simulation of Hybrid Systems: A Hybrid Bond Graph Approach Indranil Roychoudhury, Matthew J. Daigle, Gautam Biswas, and Xenofon Koutsoukos SGT Inc., NASA Ames Research Center, Moffett Field,
540 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 43, NO. 4, APRIL Algorithmic Analysis of Nonlinear Hybrid Systems
 540 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 43, NO. 4, APRIL 1998 Algorithmic Analysis of Nonlinear Hybrid Systems Thomas A. Henzinger, Pei-Hsin Ho, Howard Wong-Toi Abstract Hybrid systems are digital
540 IEEE TRANSACTIONS ON AUTOMATIC CONTROL, VOL. 43, NO. 4, APRIL 1998 Algorithmic Analysis of Nonlinear Hybrid Systems Thomas A. Henzinger, Pei-Hsin Ho, Howard Wong-Toi Abstract Hybrid systems are digital
TESTING is one of the most important parts of the
 IEEE TRANSACTIONS 1 Generating Complete Controllable Test Suites for Distributed Testing Robert M. Hierons, Senior Member, IEEE Abstract A test suite is m-complete for finite state machine (FSM) M if it
IEEE TRANSACTIONS 1 Generating Complete Controllable Test Suites for Distributed Testing Robert M. Hierons, Senior Member, IEEE Abstract A test suite is m-complete for finite state machine (FSM) M if it
1 Introduction. 2 Process description
 1 Introduction This document describes the backround and theory of the Rotary Inverted Pendulum laboratory excercise. The purpose of this laboratory excercise is to familiarize the participants with state
1 Introduction This document describes the backround and theory of the Rotary Inverted Pendulum laboratory excercise. The purpose of this laboratory excercise is to familiarize the participants with state
Hybrid Systems Techniques for Convergence of Solutions to Switching Systems
 Hybrid Systems Techniques for Convergence of Solutions to Switching Systems Rafal Goebel, Ricardo G. Sanfelice, and Andrew R. Teel Abstract Invariance principles for hybrid systems are used to derive invariance
Hybrid Systems Techniques for Convergence of Solutions to Switching Systems Rafal Goebel, Ricardo G. Sanfelice, and Andrew R. Teel Abstract Invariance principles for hybrid systems are used to derive invariance
Is there Life after Zeno?
 Is there Life after Zeno? Taking Executions Past the Breaking (Zeno) Point Aaron D. Ames, Haiyang Zheng, Robert D. Gregg and Shankar Sastry Department of Electrical Engineering and Computer Sciences University
Is there Life after Zeno? Taking Executions Past the Breaking (Zeno) Point Aaron D. Ames, Haiyang Zheng, Robert D. Gregg and Shankar Sastry Department of Electrical Engineering and Computer Sciences University
Plasma: A new SMC Checker. Axel Legay. In collaboration with L. Traonouez and S. Sedwards.
 Plasma: A new SMC Checker Axel Legay In collaboration with L. Traonouez and S. Sedwards. 1 Plasma Lab A PLAtform for Statistical Model Analysis A library of statistical model-checking algorithms (Monte-Carlo,
Plasma: A new SMC Checker Axel Legay In collaboration with L. Traonouez and S. Sedwards. 1 Plasma Lab A PLAtform for Statistical Model Analysis A library of statistical model-checking algorithms (Monte-Carlo,
Formally Correct Monitors for Hybrid Automata. Verimag Research Report n o TR
 Formally Correct Monitors for Hybrid Automata Goran Frehse, Nikolaos Kekatos, Dejan Nickovic Verimag Research Report n o TR-2017-5 September 20, 2017 Verimag, University of Grenoble Alpes, Grenoble, France.
Formally Correct Monitors for Hybrid Automata Goran Frehse, Nikolaos Kekatos, Dejan Nickovic Verimag Research Report n o TR-2017-5 September 20, 2017 Verimag, University of Grenoble Alpes, Grenoble, France.
7. Queueing Systems. 8. Petri nets vs. State Automata
 Petri Nets 1. Finite State Automata 2. Petri net notation and definition (no dynamics) 3. Introducing State: Petri net marking 4. Petri net dynamics 5. Capacity Constrained Petri nets 6. Petri net models
Petri Nets 1. Finite State Automata 2. Petri net notation and definition (no dynamics) 3. Introducing State: Petri net marking 4. Petri net dynamics 5. Capacity Constrained Petri nets 6. Petri net models
Physical Modeling of Hybrid Systems with Rand Model Designer
 Physical Modeling of Hybrid Systems with Rand Model Designer D. Inihov,* Y. Kolesov,** Y. Senichenkov*** *MvSoft, Moscow, Russia, (e-mail: inihov@mail.ru) **R F C A, Moscow, Russia (e-mail: ybk2@mail.ru)
Physical Modeling of Hybrid Systems with Rand Model Designer D. Inihov,* Y. Kolesov,** Y. Senichenkov*** *MvSoft, Moscow, Russia, (e-mail: inihov@mail.ru) **R F C A, Moscow, Russia (e-mail: ybk2@mail.ru)
Models for Efficient Timed Verification
 Models for Efficient Timed Verification François Laroussinie LSV / ENS de Cachan CNRS UMR 8643 Monterey Workshop - Composition of embedded systems Model checking System Properties Formalizing step? ϕ Model
Models for Efficient Timed Verification François Laroussinie LSV / ENS de Cachan CNRS UMR 8643 Monterey Workshop - Composition of embedded systems Model checking System Properties Formalizing step? ϕ Model
Description of the ED library Basic Atoms
 Description of the ED library Basic Atoms Simulation Software / Description of the ED library BASIC ATOMS Enterprise Dynamics Copyright 2010 Incontrol Simulation Software B.V. All rights reserved Papendorpseweg
Description of the ED library Basic Atoms Simulation Software / Description of the ED library BASIC ATOMS Enterprise Dynamics Copyright 2010 Incontrol Simulation Software B.V. All rights reserved Papendorpseweg
Networked Control System Protocols Modeling & Analysis using Stochastic Impulsive Systems
 Networked Control System Protocols Modeling & Analysis using Stochastic Impulsive Systems João P. Hespanha Center for Control Dynamical Systems and Computation Talk outline Examples feedback over shared
Networked Control System Protocols Modeling & Analysis using Stochastic Impulsive Systems João P. Hespanha Center for Control Dynamical Systems and Computation Talk outline Examples feedback over shared
PC Control / Touch Control
 PC Control / Touch Control Version 6.0 / 5.840.0150 New Features Manual 8.840.8007EN Metrohm AG CH-9101 Herisau Switzerland Phone +41 71 353 85 85 Fax +41 71 353 89 01 info@metrohm.com www.metrohm.com
PC Control / Touch Control Version 6.0 / 5.840.0150 New Features Manual 8.840.8007EN Metrohm AG CH-9101 Herisau Switzerland Phone +41 71 353 85 85 Fax +41 71 353 89 01 info@metrohm.com www.metrohm.com
Constructive Models of Discrete and Continuous Physical Phenomena
 Constructive Models of Discrete and Continuous Physical Phenomena Edward A. Lee Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2014-15 http://www.eecs.berkeley.edu/pubs/techrpts/2014/eecs-2014-15.html
Constructive Models of Discrete and Continuous Physical Phenomena Edward A. Lee Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2014-15 http://www.eecs.berkeley.edu/pubs/techrpts/2014/eecs-2014-15.html
Differential Equations in the Unifying Theories of Programming
 Grant Agreement: 644047 INtegrated TOol chain for model-based design of CPSs Differential Equations in the Unifying Theories of Programming Technical Note Number: D2.1c Version: 0.7 Date: December 2015
Grant Agreement: 644047 INtegrated TOol chain for model-based design of CPSs Differential Equations in the Unifying Theories of Programming Technical Note Number: D2.1c Version: 0.7 Date: December 2015
Verification of Nonlinear Hybrid Systems with Ariadne
 Verification of Nonlinear Hybrid Systems with Ariadne Luca Geretti and Tiziano Villa June 2, 2016 June 2, 2016 Verona, Italy 1 / 1 Outline June 2, 2016 Verona, Italy 2 / 1 Outline June 2, 2016 Verona,
Verification of Nonlinear Hybrid Systems with Ariadne Luca Geretti and Tiziano Villa June 2, 2016 June 2, 2016 Verona, Italy 1 / 1 Outline June 2, 2016 Verona, Italy 2 / 1 Outline June 2, 2016 Verona,
Automation in Complex Systems MIE090
 Automation in Complex Systems MIE090 Exam Monday May 29, 2017 You may bring the course book and the reprints (defined in the course requirements), but not the solution to problems or your own solutions
Automation in Complex Systems MIE090 Exam Monday May 29, 2017 You may bring the course book and the reprints (defined in the course requirements), but not the solution to problems or your own solutions
High Performance Computing
 Master Degree Program in Computer Science and Networking, 2014-15 High Performance Computing 2 nd appello February 11, 2015 Write your name, surname, student identification number (numero di matricola),
Master Degree Program in Computer Science and Networking, 2014-15 High Performance Computing 2 nd appello February 11, 2015 Write your name, surname, student identification number (numero di matricola),
Logic Model Checking
 Logic Model Checking Lecture Notes 10:18 Caltech 101b.2 January-March 2004 Course Text: The Spin Model Checker: Primer and Reference Manual Addison-Wesley 2003, ISBN 0-321-22862-6, 608 pgs. the assignment
Logic Model Checking Lecture Notes 10:18 Caltech 101b.2 January-March 2004 Course Text: The Spin Model Checker: Primer and Reference Manual Addison-Wesley 2003, ISBN 0-321-22862-6, 608 pgs. the assignment
ES205 Analysis and Design of Engineering Systems: Lab 1: An Introductory Tutorial: Getting Started with SIMULINK
 ES205 Analysis and Design of Engineering Systems: Lab 1: An Introductory Tutorial: Getting Started with SIMULINK What is SIMULINK? SIMULINK is a software package for modeling, simulating, and analyzing
ES205 Analysis and Design of Engineering Systems: Lab 1: An Introductory Tutorial: Getting Started with SIMULINK What is SIMULINK? SIMULINK is a software package for modeling, simulating, and analyzing
YTÜ Mechanical Engineering Department
 YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Date: Lab
YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Date: Lab
Introduction to Modelling and Simulation
 Introduction to Modelling and Simulation Prof. Cesar de Prada Dpt. Systems Engineering and Automatic Control EII, University of Valladolid, Spain prada@autom.uva.es Digital simulation Methods and tools
Introduction to Modelling and Simulation Prof. Cesar de Prada Dpt. Systems Engineering and Automatic Control EII, University of Valladolid, Spain prada@autom.uva.es Digital simulation Methods and tools
IMPLEMENTATION OF CONTINUOUS-TIME DYNAMICS IN SCICOS. Masoud Najafi Azzedine Azil Ramine Nikoukhah
 IMPLEMENTATION OF CONTINUOUS-TIME DYNAMICS IN SCICOS Masoud Najafi Azzedine Azil Ramine Nikoukhah INRIA, Rocquencourt, BP 05, 7853 Le Chesnay cedex, France KEYWORDS: Hybrid systems, Synchronous language,
IMPLEMENTATION OF CONTINUOUS-TIME DYNAMICS IN SCICOS Masoud Najafi Azzedine Azil Ramine Nikoukhah INRIA, Rocquencourt, BP 05, 7853 Le Chesnay cedex, France KEYWORDS: Hybrid systems, Synchronous language,
Lecture 14 - Using the MATLAB Control System Toolbox and Simulink Friday, February 8, 2013
 Today s Objectives ENGR 105: Feedback Control Design Winter 2013 Lecture 14 - Using the MATLAB Control System Toolbox and Simulink Friday, February 8, 2013 1. introduce the MATLAB Control System Toolbox
Today s Objectives ENGR 105: Feedback Control Design Winter 2013 Lecture 14 - Using the MATLAB Control System Toolbox and Simulink Friday, February 8, 2013 1. introduce the MATLAB Control System Toolbox
Subject: Introduction to Process Control. Week 01, Lectures 01 02, Spring Content
 v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
Languages for Programming Hybrid Discrete/Continuous-Time Systems
 Languages for Programming Hybrid Discrete/Continuous-Time Systems Marc Pouzet ENS Paris/UPMC/INRIA Collège de France, March 26, 2014 In collaboration with Albert Benveniste, Timothy Bourke, Benoit Caillaud
Languages for Programming Hybrid Discrete/Continuous-Time Systems Marc Pouzet ENS Paris/UPMC/INRIA Collège de France, March 26, 2014 In collaboration with Albert Benveniste, Timothy Bourke, Benoit Caillaud
Step Simulation Based Verification of Nonlinear Deterministic Hybrid System
 Step Simulation Based Verification of Nonlinear Deterministic Hybrid System Ratnesh Kumar, Professor, IEEE Fellow PhD Student: Hao Ren Electrical and Computer Engineering Iowa State University Verification
Step Simulation Based Verification of Nonlinear Deterministic Hybrid System Ratnesh Kumar, Professor, IEEE Fellow PhD Student: Hao Ren Electrical and Computer Engineering Iowa State University Verification
Figure 1 A linear, time-invariant circuit. It s important to us that the circuit is both linear and time-invariant. To see why, let s us the notation
 Convolution In this section we consider the problem of determining the response of a linear, time-invariant circuit to an arbitrary input, x(t). This situation is illustrated in Figure 1 where x(t) is
Convolution In this section we consider the problem of determining the response of a linear, time-invariant circuit to an arbitrary input, x(t). This situation is illustrated in Figure 1 where x(t) is
HYPENS Manual. Fausto Sessego, Alessandro Giua, Carla Seatzu. February 7, 2008
 HYPENS Manual Fausto Sessego, Alessandro Giua, Carla Seatzu February 7, 28 HYPENS is an open source tool to simulate timed discrete, continuous and hybrid Petri nets. It has been developed in Matlab to
HYPENS Manual Fausto Sessego, Alessandro Giua, Carla Seatzu February 7, 28 HYPENS is an open source tool to simulate timed discrete, continuous and hybrid Petri nets. It has been developed in Matlab to
Model-Based Safety Assessment with AltaRica 3.0
 Model-Based Safety Assessment with AltaRica 3.0 Towards the next generation of methods, concepts and tools for probabilistic safety assessment (a computer scientist point of view) Prof. Antoine Rauzy Department
Model-Based Safety Assessment with AltaRica 3.0 Towards the next generation of methods, concepts and tools for probabilistic safety assessment (a computer scientist point of view) Prof. Antoine Rauzy Department
Simulating Zeno Hybrid Systems Beyond Their Zeno Points
 Simulating Zeno Hybrid Systems Beyond Their Zeno Points Haiyang Zheng Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-006-4 http://www.eecs.berkeley.edu/pubs/techrpts/006/eecs-006-4.html
Simulating Zeno Hybrid Systems Beyond Their Zeno Points Haiyang Zheng Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-006-4 http://www.eecs.berkeley.edu/pubs/techrpts/006/eecs-006-4.html
Modelling the Temperature Changes of a Hot Plate and Water in a Proportional, Integral, Derivative Control System
 Modelling the Temperature Changes of a Hot Plate and Water in a Proportional, Integral, Derivative Control System Grant Hutchins 1. Introduction Temperature changes in a hot plate heating system can be
Modelling the Temperature Changes of a Hot Plate and Water in a Proportional, Integral, Derivative Control System Grant Hutchins 1. Introduction Temperature changes in a hot plate heating system can be
User s Manual of Flow* Version 2.0.0
 User s Manual of Flow* Version 2.0.0 Xin Chen University of Colorado, Boulder 1 Introduction Flow* is a tool for safety verification of hybrid systems. Given a real-valued interval, a natural number m,
User s Manual of Flow* Version 2.0.0 Xin Chen University of Colorado, Boulder 1 Introduction Flow* is a tool for safety verification of hybrid systems. Given a real-valued interval, a natural number m,
CHAPTER 6 STATE SPACE: FREQUENCY RESPONSE, TIME DOMAIN
 CHAPTER 6 STATE SPACE: FREQUENCY RESPONSE, TIME DOMAIN 6. Introduction Frequency Response This chapter will begin with the state space form of the equations of motion. We will use Laplace transforms to
CHAPTER 6 STATE SPACE: FREQUENCY RESPONSE, TIME DOMAIN 6. Introduction Frequency Response This chapter will begin with the state space form of the equations of motion. We will use Laplace transforms to
Operational Semantics of Hybrid Systems
 Operational Semantics of Hybrid Systems Haiyang Zheng Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2007-68 http://www.eecs.berkeley.edu/pubs/techrpts/2007/eecs-2007-68.html
Operational Semantics of Hybrid Systems Haiyang Zheng Electrical Engineering and Computer Sciences University of California at Berkeley Technical Report No. UCB/EECS-2007-68 http://www.eecs.berkeley.edu/pubs/techrpts/2007/eecs-2007-68.html
Numerical Simulation of Dynamic Systems XXVI
 Numerical Simulation of Dynamic Systems XXVI Prof. Dr. François E. Cellier Department of Computer Science ETH Zurich May 21, 2013 Introduction Introduction We have shown in the course of this class that,
Numerical Simulation of Dynamic Systems XXVI Prof. Dr. François E. Cellier Department of Computer Science ETH Zurich May 21, 2013 Introduction Introduction We have shown in the course of this class that,
Index. 1/f Noise Need for, 200 Simulating, 200 Using cascaded linear systems, 202
 Index 1/f Noise Need for, 200 Simulating, 200 Using cascaded linear systems, 202 Absolute value block And zero-crossing detection, 11 In Clock model, 22 In Math Operations library, 23 Zero-crossing, turning
Index 1/f Noise Need for, 200 Simulating, 200 Using cascaded linear systems, 202 Absolute value block And zero-crossing detection, 11 In Clock model, 22 In Math Operations library, 23 Zero-crossing, turning