BAYESIAN DECISION THEORY. J. Elder CSE 4404/5327 Introduction to Machine Learning and Pattern Recognition
|
|
|
- Diane Neal
- 6 years ago
- Views:
Transcription
1 BAYESIAN DECISION THEORY
2 Credits 2 Some of these slides were sourced and/or modified from: Christopher Bishop, Microsoft UK Simon Prince, University College London Sergios Theodoridis, University of Athens & Konstantinos Koutroumbas, National Observatory of Athens
3 Bayesian Decision Theory: Topics 3 1. Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. What are Bayes Nets?
4 Problems for this Meeting 4 Problems Assigned Problem: 2.2
5 Bayesian Decision Theory: Topics 5 1. Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. Training and Evaluation Methods 11. What are Bayes Nets?
6 Topic 1. Probability
7 Random Variables 7 A random variable is a variable whose value is uncertain. For example, the height of a randomly selected person in this class is a random variable I won t know its value until the person is selected. Note that we are not completely uncertain about most random variables. For example, we know that height will probably be in the 5-6 range. In addition, 5 6 is more likely than 5 0 or 6 0. The function that describes the probability of each possible value of the random variable is called a probability distribution.


8 Probability Distributions 8 For a discrete distribution, the probabilities over all possible values of the random variable must sum to 1.
 = 0.50.")
9 Probability Distributions 9 For a discrete distribution, we can talk about the probability of a particular score occurring, e.g., p(province = Ontario) = We can also talk about the probability of any one of a subset of scores occurring, e.g., p(province = Ontario or Quebec) = In general, we refer to these occurrences as events.
10 Probability Distributions 10 For a continuous distribution, the probabilities over all possible values of the random variable must integrate to 1 (i.e., the area under the curve must be 1). Note that the height of a continuous distribution can exceed 1! S h a d e d a r e a = S h a d e d a r e a = S h a d e d a r e a =
11 Continuous Distributions 11 For continuous distributions, it does not make sense to talk about the probability of an exact score. e.g., what is the probability that your height is exactly inches? Normal Approximation to probability distribution for height of Canadian females (parameters from General Social Survey, 1991) Probability p µ = s = 5'3.8" 2.6" Height (in)?
12 Continuous Distributions 12 It does make sense to talk about the probability of observing a score that falls within a certain range e.g., what is the probability that you are between 5 3 and 5 7? e.g., what is the probability that you are less than 5 10? Valid events Normal Approximation to probability distribution for height of Canadian females (parameters from General Social Survey, 1991) Probability p µ = s = 5'3.8" 2.6" Height (in)
 Probability density")
13 Probability Densities 13 Cumulative distribution (CDF) Probability density (PDF)
14 Transformed Densities 14 Observations falling within ( x +! x ) tranform to the range ( y +!y )! p x (x) "x = p y (y ) "y! p y (y )! p x (x) "x "y Note that in general,!y "!x. Rather,!y!x " dy dx as!x " 0. Thus p y (y ) = p x (x) dx dy



15 Joint Distributions 15 Marginal Probability Joint Probability Conditional Probability

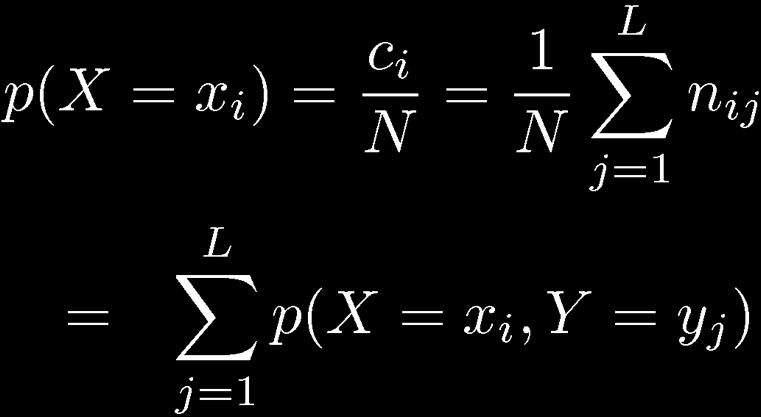
16 Joint Distributions 16 Sum Rule Product Rule

17 Joint Distributions: The Rules of Probability 17 Sum Rule Product Rule
 over the other")
18 Marginalization 18 We can recover probability distribution of any variable in a joint distribution by integrating (or summing) over the other variables
19 Conditional Probability 19 Conditional probability of X given that Y=y* is relative propensity of variable X to take different outcomes given that Y is fixed to be equal to y* Written as Pr(X Y=y*)
20 Conditional Probability 20 Conditional probability can be extracted from joint probability Extract appropriate slice and normalize
21 Conditional Probability 21 More usually written in compact form Can be re-arranged to give
22 Independence 22 If two variables X and Y are independent then variable X tells us nothing about variable Y (and vice-versa)
23 Independence 23 When variables are independent, the joint factorizes into a product of the marginals:

24 Bayes Rule 24 From before: Combining: Re-arranging:
25 Bayes Rule Terminology 25 Likelihood propensity for observing a certain value of X given a certain value of Y Prior what we know about y before seeing x Posterior what we know about y after seeing x Evidence a constant to ensure that the left hand side is a valid distribution
26 End of Lecture 2
27 Bayesian Decision Theory: Topics Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. Training and Evaluation Methods 11. What are Bayes Nets?
28 Topic 2. The Univariate Normal Distribution

29 The Gaussian Distribution 29 MATLAB Statistics Toolbox Function: normpdf(x,mu,sigma)


30 Central Limit Theorem 30 The distribution of the sum of N i.i.d. random variables becomes increasingly Gaussian as N grows. Example: N uniform [0,1] random variables.
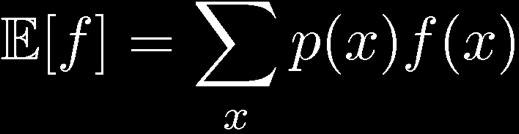
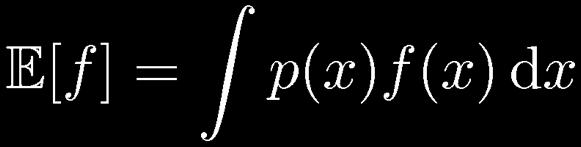
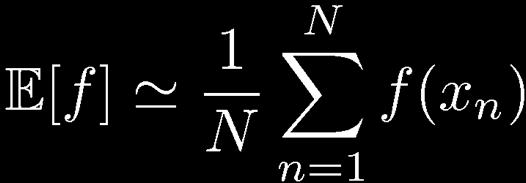
31 Expectations 31 Condi3onal Expecta3on (discrete) Approximate Expecta3on (discrete and con3nuous)

32 Variances and Covariances 32

33 Gaussian Mean and Variance 33
34 Bayesian Decision Theory: Topics Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. Training and Evaluation Methods 11. What are Bayes Nets?
35 Topic 3. Bayesian Classifiers
36 Bayesian Classification 36 Input feature vectors x = T!" x 1,x 2,...,x l # $ Assign the pattern represented by feature vector x to the most probable of the available classes! 1,! 2,...,! M That is, x! " i : P(" i x) is maximum. Posterior
37 Bayesian Classification 37 Computation of posterior probabilities Assume known Prior probabilities P(! 1 ),P(! 2 )...,P(! M ) Likelihoods p( x! i ), i = 1,2,,M
38 Bayes Rule for Classification 38 ( ) = p ( x! i )p(! i ) p( x) p! i x where M ( ) = p x! i p x " i=1 ( )p! i ( ),
39 M=2 Classes Given x classify it according to the rule If P(! 1 x) > P(! 2 x) "! 1 If P(! 2 x) > P(! 1 x) "! 2 Equivalently: classify x according to the rule If p( x! 1 )P! 1 If p( x! 2 )P! 2 ( ) > p x! 2 ( ) > p x! 1 ( )P! 2 ( )P! 1 ( ) "! 1 ( ) "! 2 For equiprobable classes the test becomes ( ) > p( x! 2 ) "! 1 ( ) > p( x! 1 ) "! 2 If p x! 1 If p x! 2
40 Example: Equiprobable Classes 40 R ( ω ) and R ( ω )
41 Example: Equiprobable Classes Probability of error The black and red shaded areas represent Thus x 0 ( ) = p(x! 2 )dx P error! 2 $ and P error! 1 "# " ( ) = p(x! 1 )dx # x 0 P e! P(error) = P (! 2 )P error! 2 = 1 2 x 0 $ "# ( ) + P! 1 1 p(x! 2 )dx + 2 +# $ x 0 ( )P error! 1 p(x! 1 )dx ( ) Bayesian classifier is OPTIMAL: it minimizes the classification error probability
42 Example: Equiprobable Classes 42 To see this, observe that shifting the threshold increases the error rate for one class of patterns more than it decreases the error rate for the other class.
43 The General Case In general, for M classes and unequal priors, the decision rule P(! i x) > P(! j x) "j # i $! i minimizes the expected error rate.
44 Types of Error 44 Minimizing the expected error rate is a pretty reasonable goal. However, it is not always the best thing to do. Example: You are designing a pedestrian detection algorithm for an autonomous navigation system. Your algorithm must decide whether there is a pedestrian crossing the street. There are two possible types of error: False positive: there is no pedestrian, but the system thinks there is. Miss: there is a pedestrian, but the system thinks there is not. Should you give equal weight to these 2 types of error?
45 Bayesian Decision Theory: Topics Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. Training and Evaluation Methods 11. What are Bayes Nets?

46 Topic 4. Minimizing Risk
47 The Loss Matrix 47 To deal with this problem, instead of minimizing error rate, we minimize something called the risk. First, we define the loss matrix L, which quantifies the cost of making each type of error. Element λ ij of the loss matrix specifies the cost of deciding class j when in fact the input is of class i. Typically, we set λ ii =0 for all i. Thus a typical loss matrix for the M = 2 case would have the form L = " $ $ # 0! 12! 21 0 % ' ' &
48 Risk 48 Given a loss function, we can now define the risk associated with each class k as: M $ i=1 r k =! ki p( x " k )dx # R i Probability we will decide Class! i given pattern from Class! k where R i is the region of the input space where we will decide i.
49 Minimizing Risk 49 Now the goal is to minimize the expected risk r, given by r = M " k=1 r k P (! ) k
50 Minimizing Risk 50 r = M " r k P (! ) k where r k =! ki p( x " k )dx k=1 M $ i=1 # R i We need to select the decision regions R i to minimize the risk r. Note that the set of R i are disjoint and exhaustive. Thus we can minimize the risk by ensuring that each input x falls in the region R i that minimizes the expected loss for that particular input, i.e., M Letting l i = #! ki p ( x " k )P (" ) k, k =1 we select the partioning regions such that x $R i if l i < l j %j & i
51 Example: M=2 51 For the 2-class case: l 1 =! 11 p ( x " 1 )P " 1 and l 2 =! 12 p ( x " 1 )P " 1 Thus we assign x to 1 if i.e., if ( ) +! 21 p x " 2 ( )P " 2 ( ) +! 22 p x " 2 ( ) ( )P " 2 ( ) (! 21 "! ) 22 p ( x # 2 )P (# ) 2 < (! 12 "! ) 11 p ( x # 1 )P (# ) 1 ( ) ( ) > P (! )(" 2 21 # " ) 22 P (! )( 1 " 12 # " ). 11 p x! 1 p x! 2 Likelihood Ratio Test
52 Likelihood Ratio Test 52 ( ) ( ) > P (! )(" 2 21 # " )? 22 P (! )( 1 " 12 # " ). 11 p x! 1 p x! 2 Typically, the loss for a correct decision is 0. Thus the likelihood ratio test becomes ( ) ( ) > P (! )? " 2 ( ) 21. " 12 p x! 1 p x! 2 P! 1 In the case of equal priors and equal loss functions, the test reduces to ( )? ( ) > 1. p x! 1 p x! 2
53 Example 53 Consider a one-dimensional input space, with features generated by normal distributions with identical variance: ( ) ( ) p(x! 1 )! N µ 1," 2 p(x! 2 )! N µ 2," 2 where µ 1 = 0, µ 2 = 1, and! 2 = 1 2 Let s assume equiprobable classes, and higher loss for errors on Class 2, specifically:! 21 = 1,! 12 = 1 2.

54 Results 54 The threshold has shifted to the left why?
55 End of Lecture 3
56 Bayesian Decision Theory: Topics Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. Training and Evaluation Methods 11. What are Bayes Nets?

57 Topic 5 The Multivariate Normal Distribution
58 The Multivariate Gaussian 58 MATLAB Statistics Toolbox Function: mvnpdf(x,mu,sigma)
59 Geometry of the Multivariate Gaussian 59 where! " Mahalanobis distance from µ to x Eigenvector equation:!u i = " i u i MATLAB Statistics Toolbox Function: mahal(x,y) where (u i,! i ) are the ith eigenvector and eigenvalue of ". Note that! real and symmetric " # i real. See Appendix B for a review of matrices and eigenvectors.

 are the ith eigenvector and")
60 Geometry of the Multivariate Gaussian 60! = Mahalanobis distance from µ to x where (u i,! i ) are the ith eigenvector and eigenvalue of ". or y = U(x - µ)

61 Moments of the Multivariate Gaussian 61 thanks to anti-symmetry of z
62 Moments of the Multivariate Gaussian 62

63 5.1 Application: Face Detection
64 Model # 1: Gaussian, uniform covariance 64 Fit model using maximum likelihood criterion face non-face Pixel 2 Pixel 1 Face Face template 59.1 non-face 69.1
 0.5 0.4 0.3 0.2 0.1 0 0 0.2 0.4 0.6 0.")
65 Model 1 Results 65 Results based on 200 cropped faces and 200 non-faces from the same database How does this work with a real image? 0.6 Pr(Hit) Pr(False Alarm)


66 Model # 2: Gaussian, diagonal covariance 66 Fit model using maximum likelihood criterion face non-face Pixel 2 Face non-face Pixel 1
67 Model 2 Results 67 Results based on 200 cropped faces and 200 non-faces from the same database Pr(Hit) Diagonal Uniform More sophisticated model unsurprisingly classifies new faces and non-faces better Pr(False Alarm)
68 Model # 3: Gaussian, full covariance 68 Fit model using maximum likelihood criterion PROBLEM: we cannot fit this model. We don t have enough data to estimate the full covariance matrix. N=800 training images D=10800 dimensions Pixel 2 Total number of measured numbers = ND = 800x10,800 = 8,640,000 Pixel 1 Total number of parameters in cov matrix = (D+1)D/2 = (10,800+1)x10,800/2 = 58,325,400
69 Transformed Densities Revisited 69 Observations falling within ( x +! x ) tranform to the range ( y +!y )! p x (x) "x = p y (y ) "y! p y (y )! p x (x) "x "y Note that in general,!y "!x. Rather,!y!x " dy dx as!x " 0. Thus p y (y ) = p x (x) dx dy
70 Problems for this week 70 Problems , , are all good! At least do problem We will talk about this Monday. (Hopefully one of you will present a solution!) Also, MATLAB exercises up to are good. At least do Exercise We will talk about this next week.
71 Bayesian Decision Theory: Topics Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. Training and Evaluation Methods 11. What are Bayes Nets?
72 Topic 6. Decision Boundaries in Higher Dimensions
73 ! Decision Surfaces 73 If decision regions R i and R j are contiguous, define! g(x)! P(" i x) # P(" j x) Then the decision surface! separates the two decision regions. g(x) is positive on one side and negative on the other.! R i : P (! i x) > P! j x ( ) + g(x) = 0 g(x) = 0 - R j : P (! j x) > P (! i x) 73
74 Discriminant Functions If f (.) monotonic, the rule remains the same if we use: x! " i if: f (P(" i x )) > f (P(" j x)) # i $ j g i (x)! f (P(" i x)) is a discriminant function In general, discriminant functions can be defined in other ways, independent of Bayes. In theory this will lead to a suboptimal solution However, non-bayesian classifiers can have significant advantages: Often a full Bayesian treatment is intractable or computationally prohibitive. Approximations made in a Bayesian treatment may lead to errors avoided by non-bayesian methods.
75 End of Lecture 4
76 Multivariate Normal Likelihoods Multivariate Gaussian pdf p(x! i ) = (2" ) 1! # i & exp $ 1 2 (x $ µ ) ( i )% # $1 i (x $ µ i ) + ' * µ i = E, - x. / # i = E, - (x $ µ i )(x $ µ i ) % called the covariance matrix. /
77 Logarithmic Discriminant Function p(x! i ) = 1! 1 (2" ) 2 2 # i & exp $ 1 2 (x $ µ ) ( i )% # $1 i (x $ µ i ) + ' * ln(!) is monotonic. Define: ( ( )) = ln p ( x! ) i + ln P(! i ) g i (x) = ln p ( x! i )P! i =! 1 2 (x! µ i )T " i!1 (x! µ i ) + ln P(# i ) + C i where C i =!! 2 ln2$! 1 2 ln " i
78 Quadratic Classifiers 78 g i (x) =! 1 2 (x! µ i )T " i!1 (x! µ i ) + ln P(# i ) + C i Thus the decision surface has a quadratic form. 0.5 For a 2D input space, the decision curves are 0.4 quadrics (ellipses, parabolas, hyperbolas or, in degenerate cases, 0.3 lines)
79 Example: Isotropic Likelihoods g i (x) =! 1 2 (x! µ i )T " i!1 (x! µ i ) + ln P(# i ) + C i Suppose that the two likelihoods are both isotropic, but with different means and variances. Then g i (x) =! 1 2" (x 2 + x ) + 1 i " (µ x + µ x )! 1 2 i 1 1 i2 2 i 2" (µ 2 + µ 2 2 i 1 i2 ) + ln P # i i g i (x)! g j (x) = 0 And will be a quadratic equation in 2 variables. ( ) ( ) + C i
80 Equal Covariances 80 g i (x) =! 1 2 (x! µ i )T " i!1 (x! µ i ) + ln P(# i ) + C i The quadratic term of the decision boundary is given by 1 2 xt! "1 "1 j "! i ( ) x Thus if the covariance matrices of the two likelihoods are identical, the decision boundary is linear.
81 Linear Classifier 81 g i (x) =! 1 2 (x! µ i )T "!1 (x! µ i ) + ln P(# i ) + C i In this case, we can drop the quadratic terms and express the discriminant function in linear form: g i (x) = w i T x + w io w i =! "1 µ i w i 0 = ln P(# i ) " 1 2 µt i!"1 µ i

82 Example 1: Isotropic, Identical Variance 82 g i (x) = w i T x + w io Decision Boundary w i =! "1 µ i w i 0 = ln P(# i ) " 1 2 µt i!"1 µ i! = " 2 I. Then w T (x # x o ) = 0, where w = µ i # µ j, and x o = 1 2 (µ i + µ j ) # " 2 ln P($ i ) P($ j ) µ i # µ j µ i # µ j 2
 = 0 where w =! \"1 (µ i \" µ j ), x 0 and = 1 2 (µ i x * (x T 1 )!1 2 x) )!1 # + µ j )! ln P(\" ) & i % ( $ P(\" j )' µ i! µ j µ i!")
83 Example 2: Equal Covariance 83 g i (x) = w i T x + w io w i =! "1 µ i w i 0 = ln P(# i ) " 1 2 µt i!"1 µ i g ij (x) = w T (x! x 0 ) = 0 where w =! "1 (µ i " µ j ), x 0 and = 1 2 (µ i x * (x T 1 )!1 2 x) )!1 # + µ j )! ln P(" ) & i % ( $ P(" j )' µ i! µ j µ i! µ j 2 )!1,
84 Minimum Distance Classifiers 84 If the two likelihoods have identical covariance AND the two classes are equiprobable, the discrimination function simplifies: g i (x) =! 1 2 (x! µ i )T " i!1 (x! µ i ) + ln P(# i ) + C i g i (x) =! 1 2 (x! µ i )T "!1 (x! µ i )
85 Isotropic Case 85 In the isotropic case, g i (x) =! 1 2 (x! µ i )T "!1 (x! µ i ) =! 1 2# 2 x! µ i Thus the Bayesian classifier simply assigns the class that minimizes the Euclidean distance d e between the observed feature vector and the class mean. 2 d e = x! µ i
86 !!! General Case: Mahalanobis Distance 86 To deal with anisotropic distributions, we simply classify according to the Mahalanobis distance, defined as! d m = g i (x) = ((x! µ i ) T "!1 (x! µ i )) 1/2 Since the covariance matrix is symmetric, it can be represented as!! = "#" T where! and where! Then we have! the columns v i of! are the eigenvectors of "! is a diagonal matrix whose diagonal elements " i are the corresponding eigenvalues. d 2 m = (x! µ i )T " T #!1 "(x! µ i )

87 General Case: Mahalanobis Distance 87 d 2 m = (x! µ i )T " T #!1 "(x! µ i ) Let x! = " T x. Then the coordinates of x! are the projections of x onto the eigenvectors of #, and we have: ( x! " µ! ) 2 1 i 1 +! + # 1 ( x! "! ) 2 l µ il 2 # l = d m Thus the curves of constant Mahalanobis distance c have ellipsoidal form.
88 Example: 88 Given! 1,! 2 : P(! 1 ) = P(! 2 ) and p(x! 1 ) = N (µ 1, "), p(x! 2 ) = N (µ 2, "), # µ 1 = 0 & # % (, µ $ 0 2 = 3 & # % (, " = & % ( ' $ 3 ' $ ' # classify the vector x = 1.0 & % ( using Bayesian classification: $ 2.2 '! -1 = # % $ 0.95 "0.15 " & ( ' Compute Mahalanobis d m from µ 1, µ 2 : d 2 =! m,1 " 1.0, 2.2 # $! ' " %& # ( = 2.952, d 2 =! m,2 " &2.0, &0.8 $ # $! &2.0 %&1 ' " &0.8 # ( = $ Classify x! " 1. Observe that d E,2 < d E,1
89 Bayesian Decision Theory: Topics Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. Training and Evaluation Methods 11. What are Bayes Nets?
90 Topic 7. Parameter Estimation
91 Topic 7.1 Maximum Likelihood Estimation
92 Maximum Likelihood Parameter Estimation Suppose we believe input vectors x are distributed as p(x)! p(x;"), where " is an unknown parameter. Given independent training input vectors X = { x 1, x 2,...x } N we want to compute the maximum likelihood estimate " ML for ". Since the input vectors are independent, we have N p(x ;")! p(x 1, x 2,...x N ;") = # p(x k ;") k =1
93 Maximum Likelihood Parameter Estimation N p(x ;!) = " p(x k ;!) k =1 N Let L(!) " ln p(x ;!) = # ln p(x k ;!) k =1 The general method is to take the derivative of L with respect to!, set it to 0 and solve for! : ˆ! ML : $L(!) $(!) = N $ln p(x k ;!) % = 0 $(!) k =1
94 Properties of the Maximum Likelihood Estimator Let! 0 be the true value of the unknown parameter vector. Then! ML is asymptotically unbiased: lim N"#E[! ML ] =! 0 2! ML is asymptotically consistent: lim E ˆ! ML %! 0 = 0 N"$

95 Example: Univariate Normal 95 Likelihood func3on

96 Example: Univariate Normal 96


97 97 Example: Univariate Normal Thus! ML is biased (although asymptotically unbiased).
98 End of Lecture 5
99 Example: Multivariate Normal 99, the log likeli- Given i.i.d. data hood function is given by



 =!")
100 Maximum Likelihood for the Gaussian 100 Set the derivative of the log likelihood function to zero, and solve to obtain One can also show that " # $ Recall: If x and a are vectors, then! (!x xt a ) =! (!x a t x) = a % & '
101 Topic 7.1 Bayesian Parameter Estimation
102 Bayesian Inference for the Gaussian (Univariate Case) 102 Assume! 2 is known. Given i.i.d. data, the likelihood function for is given by µ This has a Gaussian shape as a function of µ (but it is not a distribution over ). µ
103 Bayesian Inference for the Gaussian (Univariate Case) 103 Combined with a Gaussian prior over µ, this gives the posterior Completing the square over µ, we see that
. Get \" 2 in form aµ 2! 2bµ + c = a(µ!")
104 Bayesian Inference for the Gaussian 104 where Note: Shortcut: p ( µ X ) has the form C exp (!" 2 ). Get " 2 in form aµ 2! 2bµ + c = a(µ! b / a) 2 + const and identify µ N = b / a 1 # N 2 = a
105 Bayesian Inference for the Gaussian 105 Example: µ 0 = 0 µ = 0.8! 2 = 0.1
106 Maximum a Posteriori (MAP) Estimation 106 In MAP estimation, we use the value of µ that maximizes the posterior p µ X µ MAP = µ N. ( ) :
107 Full Bayesian Parameter Estimation 107 In both ML and MAP, we use the training data X to estimate a specific value for the unknown parameter vector, and then use that value for subsequent inference on new observations x: p ( x! ) These methods are suboptimal, because in fact we are always uncertain about the exact value of, and to be optimal we should take into account the possibility that assumes other values.
108 Full Bayesian Parameter Estimation 108 In full Bayesian parameter estimation, we do not estimate a specific value for. Instead, we compute the posterior over, and then integrate it out when computing p x X : ( ) p(x X ) = p(! X ) = " p(x!)p(! X )d! p(x!)p(!) p(x ) N p(x!) = # p(x k!) k =1 = " p(x!)p(!) p(x!)p(!)d!
 N, where In the MAP approach, we approximate p(x X )! N ( µ N,! 2 ) In the full Bayesian approach, we calculate p(x X ) =! p(x µ)p(µ X ) d µ which can be shown to yield p(x X )!")
109 Example: Univariate Normal with Unknown Mean 109 Consider again the case p(x µ)!n ( µ,! ) where! is known and µ! N ( µ 0,! ) 0 We showed that p ( µ X)! N ( 2 µ N,! ) N, where In the MAP approach, we approximate p(x X )! N ( µ N,! 2 ) In the full Bayesian approach, we calculate p(x X ) =! p(x µ)p(µ X ) d µ which can be shown to yield p(x X )! N ( µ N,! 2 2 +! ) N
110 Hints for Exercise Here are some MATLAB functions you may find useful in solving Exercise mnrnd mvnrnd mvnpdf mean cov squeeze sum repmat inv min max zeros ones
111 111 Problem function pe=pr142 %Exercise from PR Matlab Manual m(:,1)=[0 0 0]'; m(:,2)=[1 2 2]'; m(:,3)=[3 3 4]'; S=[ ; ; ]; N=1000; %Part 1 ntrain=mnrnd(n,ones(3,1)/3); %Number of training pts generated by each class ntest=mnrnd(n,ones(3,1)/3); %Number of test pts generated by each class test=[]; mml=zeros(3,3); Smli=zeros(3,3,3); for i=1:3 train=mvnrnd(m(:,i),s,ntrain(i)); %training vectors from class i test=[test;mvnrnd(m(:,i),s,ntest(i))]; %test vectors from class i mml(i,:)=mean(train); %ML estimate of mean for class i Smli(i,:,:)=ntest(i)*cov(train,1);%weighted ML estimate of covariance for class i end Sml=squeeze(mean(Smli)/N); %ML estimate of common covariance %Part 2: Euclidean distance for i=1:3 dsq(:,i)=sum((test-repmat(mml(i,:),n,1)).^2,2); end [m,idx(:,1)]=min(dsq'); %Part 3: Mahalanobis distance for i=1:3 y=test-repmat(mml(i,:),n,1); dsq(:,i)=sum((y*inv(sml)).*y,2); end [m,idx(:,2)]=min(dsq'); %Part 4: Maximum likelihood classifier for i=1:3 p(:,i)=mvnpdf(test,mml(i,:),sml); end [m,idx(:,3)]=max(p'); %Ground truth classes idxgt=[ones(ntest(1),1);2*ones(ntest(2),1);3*ones(ntest(3),1)]; for i=1:3 pe(i)=mean(idx(:,i)~=idxgt); %Error rate for class i end!
112 Bayesian Decision Theory: Topics Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. Training and Evaluation Methods 11. What are Bayes Nets?
113 Topic 8 Mixture Models and EM
114 Motivation 114 What do we do if a distribution is not wellapproximated by a standard parametric model?
115 8.1 Intuition


116 Mixtures of Gaussians 116 Combine simple models into a complex model: Component Mixing coefficient K=3

117 Mixtures of Gaussians 117

118 Mixtures of Gaussians 118 Determining parameters log likelihood µ,! and " using maximum Log of a sum; no closed form maximum. Solution: use standard, iterative, numeric optimization methods or the expectation maximization algorithm.
119 End of Lecture 6
 j p x P 1,")
120 Hidden Variable Interpretation 120 ( ) = P j N ( 2 x; µ j,! ) j p x P 1, P J, µ 1, µ J,! 1,! J J " = " p(j )p x j j =1 J j =1 ( ) x j = 1 j = 2 j = 3 j x j = 1 j = 2 j = 3 j
121 Hidden Variable Interpretation 121 ( ) = P j N ( 2 x; µ j,! ) j p x P 1, P J, µ 1, µ J,! 1,! J ASSUMPTIONS!! for each training datum x i there is a hidden variable j i.! j i represents which Gaussian x i came from! hence j i takes discrete values! OUR GOAL: To estimate the parameters!: J " = " p(j )p x j j =1 J j =1 ( ) The means µ j The covariances " j The weights (mixing coefficients) P j for all J components of the model. THING TO NOTICE:! x! If we knew the hidden variables j i for the training data it would be easy to estimate parameters just estimate individual Gaussians separately.!! j = 1 j = 2 j = 3 j


P j p ( x j,! )P j Pr(j x)!")
122 Hidden Variable Interpretation 122 THING TO NOTICE #2:!! If we knew the parameters! it would very easy to estimate the posterior distribution over each hidden variable j i using Bayes rule:! ( ) = p x j,! p j x,! J " j =1 ( )P j p ( x j,! )P j Pr(j x)! x j = 1 j = 2 j = 3 j j=1! j=2! j=3!
123 Expectation Maximization 123 Chicken and egg problem: could find j 1...N if we knew!! could find! if we knew j 1...N! Solution: Expectation Maximization (EM) algorithm (Dempster, Laird and Rubin 1977) EM for Gaussian mixtures can be viewed as alternation between 2 steps: 1. Expectation Step (E-Step) For fixed! find posterior distribution over responsibilities j 1...N! 2. Maximization Step (M-Step) Now use these posterior probabilities to re-estimate!!
124 8.2 Math
125 Mixture Model 125 Let x k,k = 1, N denote the training input observations, assumed to be independent j k! [1, J ] indicate the component of the mixture from which the observation was drawn (Note that x k is observable but j k is hidden.) Let ( ) represent the unknown parameters we are trying to estimate, where! t = " t, P t " represents the vector of coefficients for the component distributions and P represents the mixing coefficients. Our mixture model is p x k! J ( ) = " P jk p ( x k j k ;!) j =1
126 Q Function 126 We will iteratively estimate!, starting with an initial guess!(0) and monotonically improving our estimate!(t) at successive time steps t. For this purpose, we define a Q function N $ ( ) = E &# P jk log p ( x k j k ;" ) Q!;!(t) % k =1 ' ) ( The Q function represents the expected log likelihood of the training data, given our most recent estimate of the parameters!(t), where the expectation is taken over the possible values of the hidden labels j k.
127 Expectation Step 127 In the E-Step, we calculate the (expected) log probability over the possible parameter values: ( ) = E & P jk log p ( x k j k ;" ) Q!;!(t) $ % N # k =1 N # k =1 ( ) = E $ P jk log p x k j k ;" %& N # k =1 J # j k =1 = P ( j k x k ;!)P jk log p x k j k ;" ' ) ( ' () ( )
128 Maximization Step 128 In the M-Step, we select for our new parameter estimate the value that maximizes this expected log probability:!(t + 1) = arg maxq (!;!(t) )!
129 Example: Mixture of Isotropic Gaussians 129 p ( x k j;! ) = E-Step: 1 ( 2"# 2 j )! 2 % exp ' $ x $ µ k j 2 2# & ' j 2 ( * ) * ( ) = p ( j x k ;!) & " l 2 log# j Q!;!(t) N J ** k =1 j =1 $ % & 2 " 1 2# j 2 x k " µ j 2 ' + log Pj ( )
130 Example: Mixture of Isotropic Gaussians 130 Responsibilities Update Equation: ( ) = p x j;"(t) k J P j x k ;!(t) # j =1 ( )P j (t) p ( x k j;"(t) )P j (t) Parameter Update Equations: 2 0!2 L =5!2 0 (e) 2 µ j (t + 1) = N " k =1 N " k =1 P ( j x k ;!(t) ) x k P ( j x k ;!(t) )! j 2 (t + 1) = N $ k =1 P ( j x k ;"(t) ) x k # µ j (t + 1) 2 l N $ k =1 P ( j x k ;"(t) ) P j (t + 1) = 1 N N " k =1 P ( j x k ;!(t) )

131 Univariate Gaussian Mixture Example 131
132 2-Component Bivariate MATLAB Example CSE 2011Z 2010W 80 Exam grade (%) Assignment grade (%)
133 !! 2-Component Bivariate MATLAB Example 133 %update responsibilities! for i=1:k! end! p(:,i)=alphas(i).*mvnpdf(x,mu(i,:),squeeze(s(i,:,:)));! p=p./repmat((sum(p,2)),1,k);! %update parameters! for i=1:k! end! Nk=sum(p(:,i));! mu(i,:)=p(:,i)'*x/nk;! dev=x-repmat(mu(i,:),n,1);! S(i,:,:)=(repmat(p(:,i),1,D).*dev)'*dev/Nk;! alphas(i)=nk/n;! Exam grade (%) CSE 2011Z 2010W Assignment grade (%)
 Samples from p ( x! k ) Responsibilities P j x ;!")
134 Bivariate Gaussian Mixture Example (a) 1 (b) 1 (c) Samples from p x 0 0 ( k, j k!) Samples from p ( x! k ) Responsibilities P j x ;!(t) k k ( )
135 Expectation Maximization 135 EM is guaranteed to monotonically increase the likelihood. However, since in general the likelihood is nonconvex, we are not guaranteed to find the globally optimal parameters.
136 8.3 Applications
 2 L = 20!2!2!2!2 0 (d) 2!2 0 (e) 2!2 0 (f) 2 Duration of eruption (min)")
137 Old Faithful Example L = Time to next eruption (min)!2 2 0!2 0 (a) 2 L =2!2 2 0!2 0 (b) 2 L =5!2 2 0!2 0 (c) 2 L = 20!2!2!2!2 0 (d) 2!2 0 (e) 2!2 0 (f) 2 Duration of eruption (min)

138 Face Detection Example: 2 Components 138 Face Model Parameters Non-Face Model Parameters Prior Mean Standard deviation Prior Mean Standard deviation Each component is still assumed to have diagonal covariance. The face model and non-face model have divided the data into two clusters. In each case, these clusters have roughly equal weights. The primary thing that these seem to have captured is the photometric (luminance) variation. Note that the standard deviations have become smaller than for the single Gaussian model as any given data point is likely to be close to one mean or the other.
139 Results for MOG 2 Model Pr(Hit) Pr(False Alarm) MOG 2 Diagonal Uniform Performance improves relative to a single Gaussian model, although it is not dramatic. We have a better description of the data likelihood.

140 MOG 5 Components Prior Mean Face Model Parameters Standard deviation Prior Mean Non-Face Model Parameters Standard deviation

141 MOG 10 Components
142 Results for Mog 10 Model Performance improves slightly more, particularly at low false alarm rates. Pr(Hit) MOG 10 MOG 2 Diagonal Uniform Pr(False Alarm)
 use this to segment regions where the background has been")
143 Background Subtraction 143 Test Image Desired Segmentation GOAL : (i) Learn background model (ii) use this to segment regions where the background has been occluded
144 What if the scene isn t static? 144 Gaussian is no longer a good fit to the data. Not obvious exactly what probability model would fit better.
145 Background Mixture Model 145
146 Background Subtraction Example 146
147 End of Lecture 7
148 Bayesian Decision Theory: Topics Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. Training and Evaluation Methods 11. What are Bayes Nets?
149 9. Nonparametric Methods
150 Nonparametric Methods 150 Parametric distribution models are restricted to specific forms, which may not always be suitable; for example, consider modelling a multimodal distribution with a single, unimodal model. You can use a mixture model, but then you have to decide on the number of components, and hope that your parameter estimation algorithm (e.g., EM) converges to a global optimum! Nonparametric approaches make few assumptions about the overall shape of the distribution being modelled, and in some cases may be simpler than using a mixture model.



151 Histogramming 151 Histogram methods partition the data space into distinct bins with widths i and count the number of observations, n i, in each bin. Often, the same width is used for all bins, Δ i = Δ. Δ acts as a smoothing parameter. In a D-dimensional space, using M bins in each dimension will require M D bins! The curse of dimensionality
 is approximately constant over R and The expected number K out of N observations that will lie inside R is given by")
152 Kernel Density Estimation 152 Assume observations drawn from a density p(x) and consider a small region R containing x such that If the volume V of R is sufficiently small, p(x) is approximately constant over R and The expected number K out of N observations that will lie inside R is given by Thus

 It follows that")
153 Kernel Density Estimation 153 Kernel Density Estimation: fix V, estimate K from the data. Let R be a hypercube centred on x and define the kernel function (Parzen window) It follows that and hence
, use a smooth")
 such that")
154 Kernel Density Estimation 154 To avoid discontinuities in p(x), use a smooth kernel, e.g. a Gaussian (Any kernel k(u) such that will work.) h acts as a smoother.

155 KDE Example 155
156 Kernel Density Estimation 156 Problem: if V is fixed, there may be too few points in some regions to get an accurate estimate.
157 Nearest Neighbour Density Estimation 157 Nearest Neighbour Density Estimation: fix K, estimate V from the data. Consider a hypersphere centred on x and let it grow to a volume V* that includes K of the given N data points. Then for j=1:np! d=sort(abs(x(j)-xi));! V=2*d(K(i));! phat(j)=k(i)/(n*v);! end!
158 Nearest Neighbour Density Estimation 158 Nearest Neighbour Density Estimation: fix K, estimate V from the data. Consider a hypersphere centred on x and let it grow to a volume V* that includes K of the given N data points. Then K=5 K=10 K=100 True distribution Training data KNN Estimate
159 Nearest Neighbour Density Estimation 159 Problem: does not generate a proper density (for example, integral is unbounded on! D ) In practice, on finite domains, can normalize. But makes strong assumption on tails "! 1 % # $ x& '
160 Nonparametric Methods 160 Nonparametric models (not histograms) require storing and computing with the entire data set. Parametric models, once fitted, are much more efficient in terms of storage and computation.



161 K-Nearest-Neighbours for Classification 161 Given a data set with N k data points from class C k and, we have and correspondingly Since, Bayes theorem gives
162 K-Nearest-Neighbours for Classification 162 K = 3 K = 1


163 K-Nearest-Neighbours for Classification 163 K acts as a smother As, the error rate of the 1-nearestneighbour classifier is never more than twice the optimal error (obtained from the true conditional class distributions).

164 KNN Example 164
165 Naïve Bayes Classifiers 165 All of these nonparametric methods require lots of data to work. If O ( N ) training points are required for accurate estimation in 1 dimension, then O ( N D ) points are required for D-dimensional input vectors. It may sometimes be possible to assume that the individual dimensions of the feature vector are conditionally independent. Then we have ( ) = p x j! i p x! i D " j =1 ( ) This reduces the data requirements to O ( DN ).
166 End of Lecture 8
167 Bayesian Decision Theory: Topics Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. Training and Evaluation Methods 11. What are Bayes Nets?
168 10. Training and Evaluation Methods
169 Machine Learning System Design 169 The process of solving a particular classification or regression problem typically involves the following sequence of steps: 1. Design and code promising candidate systems 2. Train each of the candidate systems (i.e., learn the parameters) 3. Evaluate each of the candidate systems 4. Select and deploy the best of these candidate systems
170 Using Your Training Data 170 You will always have a finite amount of data on which to train and evaluate your systems. The performance of a classification system is often data-limited: if we only had more data, we could make the system better. Thus it is important to use your finite data set wisely.
171 Overfitting 171 Given that learning is often data-limited, it is tempting to use all of your data to estimate the parameters of your models, and then select the model with the lowest error on your training data. Unfortunately, this leads to a notorious problem called over-fitting.
172 Example: Polynomial Curve Fitting 172
173 Sum-of-Squares Error Function 173
174 How do we choose M, the order of the model? 174
175 1 st Order Polynomial 175
176 3 rd Order Polynomial 176
177 9 th Order Polynomial 177
178 Over-fitting 178 Root Mean Square (RMS) Error:
179 Overfitting and Sample Size th Order Polynomial
180 Over-fitting and Sample Size th Order Polynomial
181 Methods for Preventing Over-Fitting 181 Bayesian parameter estimation Application of prior knowledge regarding the probable values of unknown parameters can often limit over-fitting of a model Model selection criteria Methods exist for comparing models of differing complexity (i.e., with different types and numbers of parameters) Bayesian Information Criterion (BIC) Akaike Information Criterion (AIC) Cross-validation This is a very simple method that is universally applicable.
182 Cross-Validation 182 The available data are partitioned into disjoint training and test subsets. Parameters are learned on the training sets. Performance of the model is then evaluated on the test set. Since the test set is independent of the training set, the evaluation is fair: models that overlearn the noise in the training set will perform poorly on the test set.
183 Cross-Validation: Choosing the Partition 183 What is the best way to partition the data? A larger training set will lead to more accurate parameter estimation. However a small test set will lead to a noisy performance score. If you can afford the computation time, repeat the training/test cycle on complementary partitions and then average the results. This gives you the best of all worlds: accurate parameter estimation and accurate evaluation. In the limit: the leave-one-out method
184 Bayesian Decision Theory: Topics Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. Training and Evaluation Methods 11. What are Bayes Nets?
185 10. What are Bayes Nets?

186 Directed Graphical Models and the Role of Causality 186 Bayes nets are directed acyclic graphs in which each node represents a random variable. Arcs signify the existence of direct causal influences between linked variables. Strengths of influences are quantified by conditional probabilities where pa k is the set of 'parent' nodes of node k. NB: For this to hold it is critical that the graph be acyclic.
187 Bayesian Networks 187 Directed Acyclic Graph (DAG) From the definition of conditional probabilities (product rule): In general: This corresponds to a complete graph.
188 Bayesian Networks 188 However, many systems have sparser causal relationships between their variables. General Factorization
189 Generative Models of Perception 189



190 Discrete Variables 190 General joint distribution: K 2-1 parameters Independent joint distribution: 2(K -1) parameters
191 Discrete Variables 191 General distributions require many parameters. General joint distribution over M variables: K M -1 parameters It is thus extremely important to identify structure in the system that corresponds to a sparser graphical model and hence fewer parameters.
192 Binary Variable Example S: Smoker? C: Cancer? H: Heart Disease? (H1, H2): Results of medical tests for heart disease (C1, C2): Results of medical tests for cancer
193 Discrete Variables 193 Example: M -node Markov chain K -1 + (M -1) K(K -1) parameters
194 Using Bayes Nets Once a DAG has been constructed, the joint probability can be obtained by multiplying the marginal (root nodes) and the conditional (non-root nodes) probabilities. Training: Once a topology is given, probabilities are estimated via the training data set. There are also methods that learn the topology. Probability Inference: This is the most common task that Bayesian networks help us to solve efficiently. Given the values of some of the variables in the graph, known as evidence, the goal is to compute the conditional probabilities for some of the other variables, given the evidence.


195 Inference in Bayes Nets 195 In inference, we clamp some of the variables to observed values, and then compute the posterior over other, unobserved variables. Simple example:
196 Example 196 a) Suppose x has been measured and its value is 1. What is the probability that w is 0? b) Suppose w is measured and its value is 1. What is the probability that x is 0?
197 Message Passing For a), computation propagates from node x to node w, resulting in P(w0 x1) = For b), computation propagates in the opposite direction, resulting in P(x0 w1) = 0.4. In general, the required inference information is computed via a combined process of message passing among the nodes of the DAG. Complexity: For singly connected graphs, message passing algorithms amount to a complexity linear in the number of nodes.
198 Bayesian Decision Theory: Topics Probability 2. The Univariate Normal Distribution 3. Bayesian Classifiers 4. Minimizing Risk 5. The Multivariate Normal Distribution 6. Decision Boundaries in Higher Dimensions 7. Parameter Estimation 8. Mixture Models and EM 9. Nonparametric Density Estimation 10. What are Bayes Nets?
BAYESIAN DECISION THEORY
 Last updated: September 17, 2012 BAYESIAN DECISION THEORY Problems 2 The following problems from the textbook are relevant: 2.1 2.9, 2.11, 2.17 For this week, please at least solve Problem 2.3. We will
Last updated: September 17, 2012 BAYESIAN DECISION THEORY Problems 2 The following problems from the textbook are relevant: 2.1 2.9, 2.11, 2.17 For this week, please at least solve Problem 2.3. We will
MIXTURE MODELS AND EM
 Last updated: November 6, 212 MIXTURE MODELS AND EM Credits 2 Some of these slides were sourced and/or modified from: Christopher Bishop, Microsoft UK Simon Prince, University College London Sergios Theodoridis,
Last updated: November 6, 212 MIXTURE MODELS AND EM Credits 2 Some of these slides were sourced and/or modified from: Christopher Bishop, Microsoft UK Simon Prince, University College London Sergios Theodoridis,
Curve Fitting Re-visited, Bishop1.2.5
 Curve Fitting Re-visited, Bishop1.2.5 Maximum Likelihood Bishop 1.2.5 Model Likelihood differentiation p(t x, w, β) = Maximum Likelihood N N ( t n y(x n, w), β 1). (1.61) n=1 As we did in the case of the
Curve Fitting Re-visited, Bishop1.2.5 Maximum Likelihood Bishop 1.2.5 Model Likelihood differentiation p(t x, w, β) = Maximum Likelihood N N ( t n y(x n, w), β 1). (1.61) n=1 As we did in the case of the
COURSE INTRODUCTION. J. Elder CSE 6390/PSYC 6225 Computational Modeling of Visual Perception
 COURSE INTRODUCTION COMPUTATIONAL MODELING OF VISUAL PERCEPTION 2 The goal of this course is to provide a framework and computational tools for modeling visual inference, motivated by interesting examples
COURSE INTRODUCTION COMPUTATIONAL MODELING OF VISUAL PERCEPTION 2 The goal of this course is to provide a framework and computational tools for modeling visual inference, motivated by interesting examples
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 2: PROBABILITY DISTRIBUTIONS
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 2: PROBABILITY DISTRIBUTIONS Parametric Distributions Basic building blocks: Need to determine given Representation: or? Recall Curve Fitting Binary Variables
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 2: PROBABILITY DISTRIBUTIONS Parametric Distributions Basic building blocks: Need to determine given Representation: or? Recall Curve Fitting Binary Variables
PROBABILITY DISTRIBUTIONS. J. Elder CSE 6390/PSYC 6225 Computational Modeling of Visual Perception
 PROBABILITY DISTRIBUTIONS Credits 2 These slides were sourced and/or modified from: Christopher Bishop, Microsoft UK Parametric Distributions 3 Basic building blocks: Need to determine given Representation:
PROBABILITY DISTRIBUTIONS Credits 2 These slides were sourced and/or modified from: Christopher Bishop, Microsoft UK Parametric Distributions 3 Basic building blocks: Need to determine given Representation:
L11: Pattern recognition principles
 L11: Pattern recognition principles Bayesian decision theory Statistical classifiers Dimensionality reduction Clustering This lecture is partly based on [Huang, Acero and Hon, 2001, ch. 4] Introduction
L11: Pattern recognition principles Bayesian decision theory Statistical classifiers Dimensionality reduction Clustering This lecture is partly based on [Huang, Acero and Hon, 2001, ch. 4] Introduction
Machine Learning Lecture 3
 Announcements Machine Learning Lecture 3 Eam dates We re in the process of fiing the first eam date Probability Density Estimation II 9.0.207 Eercises The first eercise sheet is available on L2P now First
Announcements Machine Learning Lecture 3 Eam dates We re in the process of fiing the first eam date Probability Density Estimation II 9.0.207 Eercises The first eercise sheet is available on L2P now First
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 3 Linear
Machine Learning. Nonparametric Methods. Space of ML Problems. Todo. Histograms. Instance-Based Learning (aka non-parametric methods)
") Machine Learning InstanceBased Learning (aka nonparametric methods) Supervised Learning Unsupervised Learning Reinforcement Learning Parametric Non parametric CSE 446 Machine Learning Daniel Weld March
Machine Learning InstanceBased Learning (aka nonparametric methods) Supervised Learning Unsupervised Learning Reinforcement Learning Parametric Non parametric CSE 446 Machine Learning Daniel Weld March
Bayesian Decision Theory
 Bayesian Decision Theory Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Fall 2017 CS 551, Fall 2017 c 2017, Selim Aksoy (Bilkent University) 1 / 46 Bayesian
Bayesian Decision Theory Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Fall 2017 CS 551, Fall 2017 c 2017, Selim Aksoy (Bilkent University) 1 / 46 Bayesian
Chris Bishop s PRML Ch. 8: Graphical Models
 Chris Bishop s PRML Ch. 8: Graphical Models January 24, 2008 Introduction Visualize the structure of a probabilistic model Design and motivate new models Insights into the model s properties, in particular
Chris Bishop s PRML Ch. 8: Graphical Models January 24, 2008 Introduction Visualize the structure of a probabilistic model Design and motivate new models Insights into the model s properties, in particular
Machine Learning Lecture 2
 Machine Perceptual Learning and Sensory Summer Augmented 15 Computing Many slides adapted from B. Schiele Machine Learning Lecture 2 Probability Density Estimation 16.04.2015 Bastian Leibe RWTH Aachen
Machine Perceptual Learning and Sensory Summer Augmented 15 Computing Many slides adapted from B. Schiele Machine Learning Lecture 2 Probability Density Estimation 16.04.2015 Bastian Leibe RWTH Aachen
University of Cambridge Engineering Part IIB Module 3F3: Signal and Pattern Processing Handout 2:. The Multivariate Gaussian & Decision Boundaries
 University of Cambridge Engineering Part IIB Module 3F3: Signal and Pattern Processing Handout :. The Multivariate Gaussian & Decision Boundaries..15.1.5 1 8 6 6 8 1 Mark Gales mjfg@eng.cam.ac.uk Lent
University of Cambridge Engineering Part IIB Module 3F3: Signal and Pattern Processing Handout :. The Multivariate Gaussian & Decision Boundaries..15.1.5 1 8 6 6 8 1 Mark Gales mjfg@eng.cam.ac.uk Lent
CS 2750: Machine Learning. Bayesian Networks. Prof. Adriana Kovashka University of Pittsburgh March 14, 2016
 CS 2750: Machine Learning Bayesian Networks Prof. Adriana Kovashka University of Pittsburgh March 14, 2016 Plan for today and next week Today and next time: Bayesian networks (Bishop Sec. 8.1) Conditional
CS 2750: Machine Learning Bayesian Networks Prof. Adriana Kovashka University of Pittsburgh March 14, 2016 Plan for today and next week Today and next time: Bayesian networks (Bishop Sec. 8.1) Conditional
Naïve Bayes classification
 Naïve Bayes classification 1 Probability theory Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. Examples: A person s height, the outcome of a coin toss
Naïve Bayes classification 1 Probability theory Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. Examples: A person s height, the outcome of a coin toss
Chapter 3: Maximum-Likelihood & Bayesian Parameter Estimation (part 1)
") HW 1 due today Parameter Estimation Biometrics CSE 190 Lecture 7 Today s lecture was on the blackboard. These slides are an alternative presentation of the material. CSE190, Winter10 CSE190, Winter10 Chapter
HW 1 due today Parameter Estimation Biometrics CSE 190 Lecture 7 Today s lecture was on the blackboard. These slides are an alternative presentation of the material. CSE190, Winter10 CSE190, Winter10 Chapter
Expectation Maximization
 Expectation Maximization Aaron C. Courville Université de Montréal Note: Material for the slides is taken directly from a presentation prepared by Christopher M. Bishop Learning in DAGs Two things could
Expectation Maximization Aaron C. Courville Université de Montréal Note: Material for the slides is taken directly from a presentation prepared by Christopher M. Bishop Learning in DAGs Two things could
Computer Vision Group Prof. Daniel Cremers. 10a. Markov Chain Monte Carlo
 Group Prof. Daniel Cremers 10a. Markov Chain Monte Carlo Markov Chain Monte Carlo In high-dimensional spaces, rejection sampling and importance sampling are very inefficient An alternative is Markov Chain
Group Prof. Daniel Cremers 10a. Markov Chain Monte Carlo Markov Chain Monte Carlo In high-dimensional spaces, rejection sampling and importance sampling are very inefficient An alternative is Markov Chain
Computer Vision Group Prof. Daniel Cremers. 3. Regression
 Prof. Daniel Cremers 3. Regression Categories of Learning (Rep.) Learnin g Unsupervise d Learning Clustering, density estimation Supervised Learning learning from a training data set, inference on the
Prof. Daniel Cremers 3. Regression Categories of Learning (Rep.) Learnin g Unsupervise d Learning Clustering, density estimation Supervised Learning learning from a training data set, inference on the
Pattern Recognition and Machine Learning
 Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Christopher M. Bishop Pattern Recognition and Machine Learning ÖSpri inger Contents Preface Mathematical notation Contents vii xi xiii 1 Introduction 1 1.1 Example: Polynomial Curve Fitting 4 1.2 Probability
Introduction to machine learning and pattern recognition Lecture 2 Coryn Bailer-Jones
 Introduction to machine learning and pattern recognition Lecture 2 Coryn Bailer-Jones http://www.mpia.de/homes/calj/mlpr_mpia2008.html 1 1 Last week... supervised and unsupervised methods need adaptive
Introduction to machine learning and pattern recognition Lecture 2 Coryn Bailer-Jones http://www.mpia.de/homes/calj/mlpr_mpia2008.html 1 1 Last week... supervised and unsupervised methods need adaptive
Parametric Unsupervised Learning Expectation Maximization (EM) Lecture 20.a
 Lecture 20.a") Parametric Unsupervised Learning Expectation Maximization (EM) Lecture 20.a Some slides are due to Christopher Bishop Limitations of K-means Hard assignments of data points to clusters small shift of a
Parametric Unsupervised Learning Expectation Maximization (EM) Lecture 20.a Some slides are due to Christopher Bishop Limitations of K-means Hard assignments of data points to clusters small shift of a
CS 195-5: Machine Learning Problem Set 1
 CS 95-5: Machine Learning Problem Set Douglas Lanman dlanman@brown.edu 7 September Regression Problem Show that the prediction errors y f(x; ŵ) are necessarily uncorrelated with any linear function of
CS 95-5: Machine Learning Problem Set Douglas Lanman dlanman@brown.edu 7 September Regression Problem Show that the prediction errors y f(x; ŵ) are necessarily uncorrelated with any linear function of
Bayesian Decision and Bayesian Learning
 Bayesian Decision and Bayesian Learning Ying Wu Electrical Engineering and Computer Science Northwestern University Evanston, IL 60208 http://www.eecs.northwestern.edu/~yingwu 1 / 30 Bayes Rule p(x ω i
Bayesian Decision and Bayesian Learning Ying Wu Electrical Engineering and Computer Science Northwestern University Evanston, IL 60208 http://www.eecs.northwestern.edu/~yingwu 1 / 30 Bayes Rule p(x ω i
The Bayes classifier
 The Bayes classifier Consider where is a random vector in is a random variable (depending on ) Let be a classifier with probability of error/risk given by The Bayes classifier (denoted ) is the optimal
The Bayes classifier Consider where is a random vector in is a random variable (depending on ) Let be a classifier with probability of error/risk given by The Bayes classifier (denoted ) is the optimal
CPSC 540: Machine Learning
 CPSC 540: Machine Learning Undirected Graphical Models Mark Schmidt University of British Columbia Winter 2016 Admin Assignment 3: 2 late days to hand it in today, Thursday is final day. Assignment 4:
CPSC 540: Machine Learning Undirected Graphical Models Mark Schmidt University of British Columbia Winter 2016 Admin Assignment 3: 2 late days to hand it in today, Thursday is final day. Assignment 4:
Machine Learning. Gaussian Mixture Models. Zhiyao Duan & Bryan Pardo, Machine Learning: EECS 349 Fall
 Machine Learning Gaussian Mixture Models Zhiyao Duan & Bryan Pardo, Machine Learning: EECS 349 Fall 2012 1 The Generative Model POV We think of the data as being generated from some process. We assume
Machine Learning Gaussian Mixture Models Zhiyao Duan & Bryan Pardo, Machine Learning: EECS 349 Fall 2012 1 The Generative Model POV We think of the data as being generated from some process. We assume
Lecture 3: Pattern Classification
 EE E6820: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 1 2 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mixtures
EE E6820: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 1 2 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mixtures
Naïve Bayes classification. p ij 11/15/16. Probability theory. Probability theory. Probability theory. X P (X = x i )=1 i. Marginal Probability
=1 i. Marginal Probability") Probability theory Naïve Bayes classification Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. s: A person s height, the outcome of a coin toss Distinguish
Probability theory Naïve Bayes classification Random variable: a variable whose possible values are numerical outcomes of a random phenomenon. s: A person s height, the outcome of a coin toss Distinguish
Machine Learning Lecture 5
 Machine Learning Lecture 5 Linear Discriminant Functions 26.10.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Fundamentals Bayes Decision Theory
Machine Learning Lecture 5 Linear Discriminant Functions 26.10.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Fundamentals Bayes Decision Theory
COM336: Neural Computing
 COM336: Neural Computing http://www.dcs.shef.ac.uk/ sjr/com336/ Lecture 2: Density Estimation Steve Renals Department of Computer Science University of Sheffield Sheffield S1 4DP UK email: s.renals@dcs.shef.ac.uk
COM336: Neural Computing http://www.dcs.shef.ac.uk/ sjr/com336/ Lecture 2: Density Estimation Steve Renals Department of Computer Science University of Sheffield Sheffield S1 4DP UK email: s.renals@dcs.shef.ac.uk
Bayesian decision theory Introduction to Pattern Recognition. Lectures 4 and 5: Bayesian decision theory
 Bayesian decision theory 8001652 Introduction to Pattern Recognition. Lectures 4 and 5: Bayesian decision theory Jussi Tohka jussi.tohka@tut.fi Institute of Signal Processing Tampere University of Technology
Bayesian decision theory 8001652 Introduction to Pattern Recognition. Lectures 4 and 5: Bayesian decision theory Jussi Tohka jussi.tohka@tut.fi Institute of Signal Processing Tampere University of Technology
Probabilistic classification CE-717: Machine Learning Sharif University of Technology. M. Soleymani Fall 2016
 Probabilistic classification CE-717: Machine Learning Sharif University of Technology M. Soleymani Fall 2016 Topics Probabilistic approach Bayes decision theory Generative models Gaussian Bayes classifier
Probabilistic classification CE-717: Machine Learning Sharif University of Technology M. Soleymani Fall 2016 Topics Probabilistic approach Bayes decision theory Generative models Gaussian Bayes classifier
Machine Learning for Signal Processing Bayes Classification and Regression
 Machine Learning for Signal Processing Bayes Classification and Regression Instructor: Bhiksha Raj 11755/18797 1 Recap: KNN A very effective and simple way of performing classification Simple model: For
Machine Learning for Signal Processing Bayes Classification and Regression Instructor: Bhiksha Raj 11755/18797 1 Recap: KNN A very effective and simple way of performing classification Simple model: For
Introduction to Machine Learning Midterm, Tues April 8
 Introduction to Machine Learning 10-701 Midterm, Tues April 8 [1 point] Name: Andrew ID: Instructions: You are allowed a (two-sided) sheet of notes. Exam ends at 2:45pm Take a deep breath and don t spend
Introduction to Machine Learning 10-701 Midterm, Tues April 8 [1 point] Name: Andrew ID: Instructions: You are allowed a (two-sided) sheet of notes. Exam ends at 2:45pm Take a deep breath and don t spend
5. Discriminant analysis
 5. Discriminant analysis We continue from Bayes s rule presented in Section 3 on p. 85 (5.1) where c i is a class, x isap-dimensional vector (data case) and we use class conditional probability (density
5. Discriminant analysis We continue from Bayes s rule presented in Section 3 on p. 85 (5.1) where c i is a class, x isap-dimensional vector (data case) and we use class conditional probability (density
Lecture 4: Probabilistic Learning
 DD2431 Autumn, 2015 1 Maximum Likelihood Methods Maximum A Posteriori Methods Bayesian methods 2 Classification vs Clustering Heuristic Example: K-means Expectation Maximization 3 Maximum Likelihood Methods
DD2431 Autumn, 2015 1 Maximum Likelihood Methods Maximum A Posteriori Methods Bayesian methods 2 Classification vs Clustering Heuristic Example: K-means Expectation Maximization 3 Maximum Likelihood Methods
Based on slides by Richard Zemel
 CSC 412/2506 Winter 2018 Probabilistic Learning and Reasoning Lecture 3: Directed Graphical Models and Latent Variables Based on slides by Richard Zemel Learning outcomes What aspects of a model can we
CSC 412/2506 Winter 2018 Probabilistic Learning and Reasoning Lecture 3: Directed Graphical Models and Latent Variables Based on slides by Richard Zemel Learning outcomes What aspects of a model can we
Mathematical Formulation of Our Example
 Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Mathematical Formulation of Our Example We define two binary random variables: open and, where is light on or light off. Our question is: What is? Computer Vision 1 Combining Evidence Suppose our robot
Machine Learning Linear Classification. Prof. Matteo Matteucci
 Machine Learning Linear Classification Prof. Matteo Matteucci Recall from the first lecture 2 X R p Regression Y R Continuous Output X R p Y {Ω 0, Ω 1,, Ω K } Classification Discrete Output X R p Y (X)
Machine Learning Linear Classification Prof. Matteo Matteucci Recall from the first lecture 2 X R p Regression Y R Continuous Output X R p Y {Ω 0, Ω 1,, Ω K } Classification Discrete Output X R p Y (X)
Part I. C. M. Bishop PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS
 Part I C. M. Bishop PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS Probabilistic Graphical Models Graphical representation of a probabilistic model Each variable corresponds to a
Part I C. M. Bishop PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 8: GRAPHICAL MODELS Probabilistic Graphical Models Graphical representation of a probabilistic model Each variable corresponds to a
EEL 851: Biometrics. An Overview of Statistical Pattern Recognition EEL 851 1
 EEL 851: Biometrics An Overview of Statistical Pattern Recognition EEL 851 1 Outline Introduction Pattern Feature Noise Example Problem Analysis Segmentation Feature Extraction Classification Design Cycle
EEL 851: Biometrics An Overview of Statistical Pattern Recognition EEL 851 1 Outline Introduction Pattern Feature Noise Example Problem Analysis Segmentation Feature Extraction Classification Design Cycle
Maximum Likelihood Estimation. only training data is available to design a classifier
 Introduction to Pattern Recognition [ Part 5 ] Mahdi Vasighi Introduction Bayesian Decision Theory shows that we could design an optimal classifier if we knew: P( i ) : priors p(x i ) : class-conditional
Introduction to Pattern Recognition [ Part 5 ] Mahdi Vasighi Introduction Bayesian Decision Theory shows that we could design an optimal classifier if we knew: P( i ) : priors p(x i ) : class-conditional
Discrete Mathematics and Probability Theory Fall 2015 Lecture 21
 CS 70 Discrete Mathematics and Probability Theory Fall 205 Lecture 2 Inference In this note we revisit the problem of inference: Given some data or observations from the world, what can we infer about
CS 70 Discrete Mathematics and Probability Theory Fall 205 Lecture 2 Inference In this note we revisit the problem of inference: Given some data or observations from the world, what can we infer about
ECE521 week 3: 23/26 January 2017
 ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
ECE521 week 3: 23/26 January 2017 Outline Probabilistic interpretation of linear regression - Maximum likelihood estimation (MLE) - Maximum a posteriori (MAP) estimation Bias-variance trade-off Linear
Parametric Models. Dr. Shuang LIANG. School of Software Engineering TongJi University Fall, 2012
 Parametric Models Dr. Shuang LIANG School of Software Engineering TongJi University Fall, 2012 Today s Topics Maximum Likelihood Estimation Bayesian Density Estimation Today s Topics Maximum Likelihood
Parametric Models Dr. Shuang LIANG School of Software Engineering TongJi University Fall, 2012 Today s Topics Maximum Likelihood Estimation Bayesian Density Estimation Today s Topics Maximum Likelihood
Recent Advances in Bayesian Inference Techniques
 Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Recent Advances in Bayesian Inference Techniques Christopher M. Bishop Microsoft Research, Cambridge, U.K. research.microsoft.com/~cmbishop SIAM Conference on Data Mining, April 2004 Abstract Bayesian
Machine Learning, Fall 2009: Midterm
 10-601 Machine Learning, Fall 009: Midterm Monday, November nd hours 1. Personal info: Name: Andrew account: E-mail address:. You are permitted two pages of notes and a calculator. Please turn off all
10-601 Machine Learning, Fall 009: Midterm Monday, November nd hours 1. Personal info: Name: Andrew account: E-mail address:. You are permitted two pages of notes and a calculator. Please turn off all
Ch 4. Linear Models for Classification
 Ch 4. Linear Models for Classification Pattern Recognition and Machine Learning, C. M. Bishop, 2006. Department of Computer Science and Engineering Pohang University of Science and echnology 77 Cheongam-ro,
Ch 4. Linear Models for Classification Pattern Recognition and Machine Learning, C. M. Bishop, 2006. Department of Computer Science and Engineering Pohang University of Science and echnology 77 Cheongam-ro,
STA414/2104 Statistical Methods for Machine Learning II
 STA414/2104 Statistical Methods for Machine Learning II Murat A. Erdogdu & David Duvenaud Department of Computer Science Department of Statistical Sciences Lecture 3 Slide credits: Russ Salakhutdinov Announcements
STA414/2104 Statistical Methods for Machine Learning II Murat A. Erdogdu & David Duvenaud Department of Computer Science Department of Statistical Sciences Lecture 3 Slide credits: Russ Salakhutdinov Announcements
9/12/17. Types of learning. Modeling data. Supervised learning: Classification. Supervised learning: Regression. Unsupervised learning: Clustering
 Types of learning Modeling data Supervised: we know input and targets Goal is to learn a model that, given input data, accurately predicts target data Unsupervised: we know the input only and want to make
Types of learning Modeling data Supervised: we know input and targets Goal is to learn a model that, given input data, accurately predicts target data Unsupervised: we know the input only and want to make
10708 Graphical Models: Homework 2
 10708 Graphical Models: Homework 2 Due Monday, March 18, beginning of class Feburary 27, 2013 Instructions: There are five questions (one for extra credit) on this assignment. There is a problem involves
10708 Graphical Models: Homework 2 Due Monday, March 18, beginning of class Feburary 27, 2013 Instructions: There are five questions (one for extra credit) on this assignment. There is a problem involves
Nonparametric Bayesian Methods (Gaussian Processes)
") [70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
[70240413 Statistical Machine Learning, Spring, 2015] Nonparametric Bayesian Methods (Gaussian Processes) Jun Zhu dcszj@mail.tsinghua.edu.cn http://bigml.cs.tsinghua.edu.cn/~jun State Key Lab of Intelligent
Machine Learning Techniques for Computer Vision
 Machine Learning Techniques for Computer Vision Part 2: Unsupervised Learning Microsoft Research Cambridge x 3 1 0.5 0.2 0 0.5 0.3 0 0.5 1 ECCV 2004, Prague x 2 x 1 Overview of Part 2 Mixture models EM
Machine Learning Techniques for Computer Vision Part 2: Unsupervised Learning Microsoft Research Cambridge x 3 1 0.5 0.2 0 0.5 0.3 0 0.5 1 ECCV 2004, Prague x 2 x 1 Overview of Part 2 Mixture models EM
The Expectation-Maximization Algorithm
 1/29 EM & Latent Variable Models Gaussian Mixture Models EM Theory The Expectation-Maximization Algorithm Mihaela van der Schaar Department of Engineering Science University of Oxford MLE for Latent Variable
1/29 EM & Latent Variable Models Gaussian Mixture Models EM Theory The Expectation-Maximization Algorithm Mihaela van der Schaar Department of Engineering Science University of Oxford MLE for Latent Variable
Lecture 3: Pattern Classification. Pattern classification
 EE E68: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mitures and
EE E68: Speech & Audio Processing & Recognition Lecture 3: Pattern Classification 3 4 5 The problem of classification Linear and nonlinear classifiers Probabilistic classification Gaussians, mitures and
Parametric Techniques
 Parametric Techniques Jason J. Corso SUNY at Buffalo J. Corso (SUNY at Buffalo) Parametric Techniques 1 / 39 Introduction When covering Bayesian Decision Theory, we assumed the full probabilistic structure
Parametric Techniques Jason J. Corso SUNY at Buffalo J. Corso (SUNY at Buffalo) Parametric Techniques 1 / 39 Introduction When covering Bayesian Decision Theory, we assumed the full probabilistic structure
Machine Learning Lecture 2
 Machine Perceptual Learning and Sensory Summer Augmented 6 Computing Announcements Machine Learning Lecture 2 Course webpage http://www.vision.rwth-aachen.de/teaching/ Slides will be made available on
Machine Perceptual Learning and Sensory Summer Augmented 6 Computing Announcements Machine Learning Lecture 2 Course webpage http://www.vision.rwth-aachen.de/teaching/ Slides will be made available on
Machine Learning Lecture 2
 Announcements Machine Learning Lecture 2 Eceptional number of lecture participants this year Current count: 449 participants This is very nice, but it stretches our resources to their limits Probability
Announcements Machine Learning Lecture 2 Eceptional number of lecture participants this year Current count: 449 participants This is very nice, but it stretches our resources to their limits Probability
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2016
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2016 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Introduction to Graphical Models
 Introduction to Graphical Models The 15 th Winter School of Statistical Physics POSCO International Center & POSTECH, Pohang 2018. 1. 9 (Tue.) Yung-Kyun Noh GENERALIZATION FOR PREDICTION 2 Probabilistic
Introduction to Graphical Models The 15 th Winter School of Statistical Physics POSCO International Center & POSTECH, Pohang 2018. 1. 9 (Tue.) Yung-Kyun Noh GENERALIZATION FOR PREDICTION 2 Probabilistic
Probability Based Learning
 Probability Based Learning Lecture 7, DD2431 Machine Learning J. Sullivan, A. Maki September 2013 Advantages of Probability Based Methods Work with sparse training data. More powerful than deterministic
Probability Based Learning Lecture 7, DD2431 Machine Learning J. Sullivan, A. Maki September 2013 Advantages of Probability Based Methods Work with sparse training data. More powerful than deterministic
Mark your answers ON THE EXAM ITSELF. If you are not sure of your answer you may wish to provide a brief explanation.
 CS 189 Spring 2015 Introduction to Machine Learning Midterm You have 80 minutes for the exam. The exam is closed book, closed notes except your one-page crib sheet. No calculators or electronic items.
CS 189 Spring 2015 Introduction to Machine Learning Midterm You have 80 minutes for the exam. The exam is closed book, closed notes except your one-page crib sheet. No calculators or electronic items.
Cheng Soon Ong & Christian Walder. Canberra February June 2018
 Cheng Soon Ong & Christian Walder Research Group and College of Engineering and Computer Science Canberra February June 2018 Outlines Overview Introduction Linear Algebra Probability Linear Regression
Cheng Soon Ong & Christian Walder Research Group and College of Engineering and Computer Science Canberra February June 2018 Outlines Overview Introduction Linear Algebra Probability Linear Regression
Midterm. Introduction to Machine Learning. CS 189 Spring Please do not open the exam before you are instructed to do so.
 CS 89 Spring 07 Introduction to Machine Learning Midterm Please do not open the exam before you are instructed to do so. The exam is closed book, closed notes except your one-page cheat sheet. Electronic
CS 89 Spring 07 Introduction to Machine Learning Midterm Please do not open the exam before you are instructed to do so. The exam is closed book, closed notes except your one-page cheat sheet. Electronic
Lecture 13: Data Modelling and Distributions. Intelligent Data Analysis and Probabilistic Inference Lecture 13 Slide No 1
 Lecture 13: Data Modelling and Distributions Intelligent Data Analysis and Probabilistic Inference Lecture 13 Slide No 1 Why data distributions? It is a well established fact that many naturally occurring
Lecture 13: Data Modelling and Distributions Intelligent Data Analysis and Probabilistic Inference Lecture 13 Slide No 1 Why data distributions? It is a well established fact that many naturally occurring
Introduction to Machine Learning. Maximum Likelihood and Bayesian Inference. Lecturers: Eran Halperin, Lior Wolf
 1 Introduction to Machine Learning Maximum Likelihood and Bayesian Inference Lecturers: Eran Halperin, Lior Wolf 2014-15 We know that X ~ B(n,p), but we do not know p. We get a random sample from X, a
1 Introduction to Machine Learning Maximum Likelihood and Bayesian Inference Lecturers: Eran Halperin, Lior Wolf 2014-15 We know that X ~ B(n,p), but we do not know p. We get a random sample from X, a
Instance-based Learning CE-717: Machine Learning Sharif University of Technology. M. Soleymani Fall 2016
 Instance-based Learning CE-717: Machine Learning Sharif University of Technology M. Soleymani Fall 2016 Outline Non-parametric approach Unsupervised: Non-parametric density estimation Parzen Windows Kn-Nearest
Instance-based Learning CE-717: Machine Learning Sharif University of Technology M. Soleymani Fall 2016 Outline Non-parametric approach Unsupervised: Non-parametric density estimation Parzen Windows Kn-Nearest
Statistical Pattern Recognition
 Statistical Pattern Recognition Expectation Maximization (EM) and Mixture Models Hamid R. Rabiee Jafar Muhammadi, Mohammad J. Hosseini Spring 2014 http://ce.sharif.edu/courses/92-93/2/ce725-2 Agenda Expectation-maximization
Statistical Pattern Recognition Expectation Maximization (EM) and Mixture Models Hamid R. Rabiee Jafar Muhammadi, Mohammad J. Hosseini Spring 2014 http://ce.sharif.edu/courses/92-93/2/ce725-2 Agenda Expectation-maximization
Introduction to Probabilistic Graphical Models
 Introduction to Probabilistic Graphical Models Sargur Srihari srihari@cedar.buffalo.edu 1 Topics 1. What are probabilistic graphical models (PGMs) 2. Use of PGMs Engineering and AI 3. Directionality in
Introduction to Probabilistic Graphical Models Sargur Srihari srihari@cedar.buffalo.edu 1 Topics 1. What are probabilistic graphical models (PGMs) 2. Use of PGMs Engineering and AI 3. Directionality in
CSC 411: Lecture 09: Naive Bayes
 CSC 411: Lecture 09: Naive Bayes Class based on Raquel Urtasun & Rich Zemel s lectures Sanja Fidler University of Toronto Feb 8, 2015 Urtasun, Zemel, Fidler (UofT) CSC 411: 09-Naive Bayes Feb 8, 2015 1
CSC 411: Lecture 09: Naive Bayes Class based on Raquel Urtasun & Rich Zemel s lectures Sanja Fidler University of Toronto Feb 8, 2015 Urtasun, Zemel, Fidler (UofT) CSC 411: 09-Naive Bayes Feb 8, 2015 1
University of Cambridge Engineering Part IIB Module 4F10: Statistical Pattern Processing Handout 2: Multivariate Gaussians
 Engineering Part IIB: Module F Statistical Pattern Processing University of Cambridge Engineering Part IIB Module F: Statistical Pattern Processing Handout : Multivariate Gaussians. Generative Model Decision
Engineering Part IIB: Module F Statistical Pattern Processing University of Cambridge Engineering Part IIB Module F: Statistical Pattern Processing Handout : Multivariate Gaussians. Generative Model Decision
UNIVERSITY of PENNSYLVANIA CIS 520: Machine Learning Final, Fall 2013
 UNIVERSITY of PENNSYLVANIA CIS 520: Machine Learning Final, Fall 2013 Exam policy: This exam allows two one-page, two-sided cheat sheets; No other materials. Time: 2 hours. Be sure to write your name and
UNIVERSITY of PENNSYLVANIA CIS 520: Machine Learning Final, Fall 2013 Exam policy: This exam allows two one-page, two-sided cheat sheets; No other materials. Time: 2 hours. Be sure to write your name and
Lecture 4: Probabilistic Learning. Estimation Theory. Classification with Probability Distributions
 DD2431 Autumn, 2014 1 2 3 Classification with Probability Distributions Estimation Theory Classification in the last lecture we assumed we new: P(y) Prior P(x y) Lielihood x2 x features y {ω 1,..., ω K
DD2431 Autumn, 2014 1 2 3 Classification with Probability Distributions Estimation Theory Classification in the last lecture we assumed we new: P(y) Prior P(x y) Lielihood x2 x features y {ω 1,..., ω K
Brief Introduction of Machine Learning Techniques for Content Analysis
 1 Brief Introduction of Machine Learning Techniques for Content Analysis Wei-Ta Chu 2008/11/20 Outline 2 Overview Gaussian Mixture Model (GMM) Hidden Markov Model (HMM) Support Vector Machine (SVM) Overview
1 Brief Introduction of Machine Learning Techniques for Content Analysis Wei-Ta Chu 2008/11/20 Outline 2 Overview Gaussian Mixture Model (GMM) Hidden Markov Model (HMM) Support Vector Machine (SVM) Overview
STA414/2104. Lecture 11: Gaussian Processes. Department of Statistics
 STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
STA414/2104 Lecture 11: Gaussian Processes Department of Statistics www.utstat.utoronto.ca Delivered by Mark Ebden with thanks to Russ Salakhutdinov Outline Gaussian Processes Exam review Course evaluations
MODULE -4 BAYEIAN LEARNING
 MODULE -4 BAYEIAN LEARNING CONTENT Introduction Bayes theorem Bayes theorem and concept learning Maximum likelihood and Least Squared Error Hypothesis Maximum likelihood Hypotheses for predicting probabilities
MODULE -4 BAYEIAN LEARNING CONTENT Introduction Bayes theorem Bayes theorem and concept learning Maximum likelihood and Least Squared Error Hypothesis Maximum likelihood Hypotheses for predicting probabilities
Clustering by Mixture Models. General background on clustering Example method: k-means Mixture model based clustering Model estimation
 Clustering by Mixture Models General bacground on clustering Example method: -means Mixture model based clustering Model estimation 1 Clustering A basic tool in data mining/pattern recognition: Divide
Clustering by Mixture Models General bacground on clustering Example method: -means Mixture model based clustering Model estimation 1 Clustering A basic tool in data mining/pattern recognition: Divide
Gaussian Processes. Le Song. Machine Learning II: Advanced Topics CSE 8803ML, Spring 2012
 Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
Gaussian Processes Le Song Machine Learning II: Advanced Topics CSE 8803ML, Spring 01 Pictorial view of embedding distribution Transform the entire distribution to expected features Feature space Feature
Computational Genomics
 Computational Genomics http://www.cs.cmu.edu/~02710 Introduction to probability, statistics and algorithms (brief) intro to probability Basic notations Random variable - referring to an element / event
Computational Genomics http://www.cs.cmu.edu/~02710 Introduction to probability, statistics and algorithms (brief) intro to probability Basic notations Random variable - referring to an element / event
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation. Volker Tresp Summer 2014
 Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2014 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Networks: Construction, Inference, Learning and Causal Interpretation Volker Tresp Summer 2014 1 Introduction So far we were mostly concerned with supervised learning: we predicted one or several
Bayesian Methods: Naïve Bayes
 Bayesian Methods: aïve Bayes icholas Ruozzi University of Texas at Dallas based on the slides of Vibhav Gogate Last Time Parameter learning Learning the parameter of a simple coin flipping model Prior
Bayesian Methods: aïve Bayes icholas Ruozzi University of Texas at Dallas based on the slides of Vibhav Gogate Last Time Parameter learning Learning the parameter of a simple coin flipping model Prior
Probabilistic modeling. The slides are closely adapted from Subhransu Maji s slides
 Probabilistic modeling The slides are closely adapted from Subhransu Maji s slides Overview So far the models and algorithms you have learned about are relatively disconnected Probabilistic modeling framework
Probabilistic modeling The slides are closely adapted from Subhransu Maji s slides Overview So far the models and algorithms you have learned about are relatively disconnected Probabilistic modeling framework
Algorithm-Independent Learning Issues
 Algorithm-Independent Learning Issues Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2007 c 2007, Selim Aksoy Introduction We have seen many learning
Algorithm-Independent Learning Issues Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr CS 551, Spring 2007 c 2007, Selim Aksoy Introduction We have seen many learning
Introduction to Bayesian Learning
 Course Information Introduction Introduction to Bayesian Learning Davide Bacciu Dipartimento di Informatica Università di Pisa bacciu@di.unipi.it Apprendimento Automatico: Fondamenti - A.A. 2016/2017 Outline
Course Information Introduction Introduction to Bayesian Learning Davide Bacciu Dipartimento di Informatica Università di Pisa bacciu@di.unipi.it Apprendimento Automatico: Fondamenti - A.A. 2016/2017 Outline
Mixtures of Gaussians with Sparse Structure
 Mixtures of Gaussians with Sparse Structure Costas Boulis 1 Abstract When fitting a mixture of Gaussians to training data there are usually two choices for the type of Gaussians used. Either diagonal or
Mixtures of Gaussians with Sparse Structure Costas Boulis 1 Abstract When fitting a mixture of Gaussians to training data there are usually two choices for the type of Gaussians used. Either diagonal or
Probabilistic Graphical Models
 2016 Robert Nowak Probabilistic Graphical Models 1 Introduction We have focused mainly on linear models for signals, in particular the subspace model x = Uθ, where U is a n k matrix and θ R k is a vector
2016 Robert Nowak Probabilistic Graphical Models 1 Introduction We have focused mainly on linear models for signals, in particular the subspace model x = Uθ, where U is a n k matrix and θ R k is a vector
Non-parametric Methods
 Non-parametric Methods Machine Learning Alireza Ghane Non-Parametric Methods Alireza Ghane / Torsten Möller 1 Outline Machine Learning: What, Why, and How? Curve Fitting: (e.g.) Regression and Model Selection
Non-parametric Methods Machine Learning Alireza Ghane Non-Parametric Methods Alireza Ghane / Torsten Möller 1 Outline Machine Learning: What, Why, and How? Curve Fitting: (e.g.) Regression and Model Selection
STA 4273H: Statistical Machine Learning
 STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
STA 4273H: Statistical Machine Learning Russ Salakhutdinov Department of Statistics! rsalakhu@utstat.toronto.edu! http://www.utstat.utoronto.ca/~rsalakhu/ Sidney Smith Hall, Room 6002 Lecture 11 Project
PATTERN RECOGNITION AND MACHINE LEARNING
 PATTERN RECOGNITION AND MACHINE LEARNING Chapter 1. Introduction Shuai Huang April 21, 2014 Outline 1 What is Machine Learning? 2 Curve Fitting 3 Probability Theory 4 Model Selection 5 The curse of dimensionality
PATTERN RECOGNITION AND MACHINE LEARNING Chapter 1. Introduction Shuai Huang April 21, 2014 Outline 1 What is Machine Learning? 2 Curve Fitting 3 Probability Theory 4 Model Selection 5 The curse of dimensionality
Bayesian Networks. Motivation
 Bayesian Networks Computer Sciences 760 Spring 2014 http://pages.cs.wisc.edu/~dpage/cs760/ Motivation Assume we have five Boolean variables,,,, The joint probability is,,,, How many state configurations
Bayesian Networks Computer Sciences 760 Spring 2014 http://pages.cs.wisc.edu/~dpage/cs760/ Motivation Assume we have five Boolean variables,,,, The joint probability is,,,, How many state configurations
Introduction to Machine Learning. Maximum Likelihood and Bayesian Inference. Lecturers: Eran Halperin, Yishay Mansour, Lior Wolf
 1 Introduction to Machine Learning Maximum Likelihood and Bayesian Inference Lecturers: Eran Halperin, Yishay Mansour, Lior Wolf 2013-14 We know that X ~ B(n,p), but we do not know p. We get a random sample
1 Introduction to Machine Learning Maximum Likelihood and Bayesian Inference Lecturers: Eran Halperin, Yishay Mansour, Lior Wolf 2013-14 We know that X ~ B(n,p), but we do not know p. We get a random sample
MACHINE LEARNING ADVANCED MACHINE LEARNING
 MACHINE LEARNING ADVANCED MACHINE LEARNING Recap of Important Notions on Estimation of Probability Density Functions 2 2 MACHINE LEARNING Overview Definition pdf Definition joint, condition, marginal,
MACHINE LEARNING ADVANCED MACHINE LEARNING Recap of Important Notions on Estimation of Probability Density Functions 2 2 MACHINE LEARNING Overview Definition pdf Definition joint, condition, marginal,
Gaussian Mixture Models, Expectation Maximization
 Gaussian Mixture Models, Expectation Maximization Instructor: Jessica Wu Harvey Mudd College The instructor gratefully acknowledges Andrew Ng (Stanford), Andrew Moore (CMU), Eric Eaton (UPenn), David Kauchak
Gaussian Mixture Models, Expectation Maximization Instructor: Jessica Wu Harvey Mudd College The instructor gratefully acknowledges Andrew Ng (Stanford), Andrew Moore (CMU), Eric Eaton (UPenn), David Kauchak
p L yi z n m x N n xi
 y i z n x n N x i Overview Directed and undirected graphs Conditional independence Exact inference Latent variables and EM Variational inference Books statistical perspective Graphical Models, S. Lauritzen
y i z n x n N x i Overview Directed and undirected graphs Conditional independence Exact inference Latent variables and EM Variational inference Books statistical perspective Graphical Models, S. Lauritzen
Supervised Learning: Non-parametric Estimation
 Supervised Learning: Non-parametric Estimation Edmondo Trentin March 18, 2018 Non-parametric Estimates No assumptions are made on the form of the pdfs 1. There are 3 major instances of non-parametric estimates:
Supervised Learning: Non-parametric Estimation Edmondo Trentin March 18, 2018 Non-parametric Estimates No assumptions are made on the form of the pdfs 1. There are 3 major instances of non-parametric estimates:
Notes on Machine Learning for and
 Notes on Machine Learning for 16.410 and 16.413 (Notes adapted from Tom Mitchell and Andrew Moore.) Choosing Hypotheses Generally want the most probable hypothesis given the training data Maximum a posteriori
Notes on Machine Learning for 16.410 and 16.413 (Notes adapted from Tom Mitchell and Andrew Moore.) Choosing Hypotheses Generally want the most probable hypothesis given the training data Maximum a posteriori
Probability Theory for Machine Learning. Chris Cremer September 2015
 Probability Theory for Machine Learning Chris Cremer September 2015 Outline Motivation Probability Definitions and Rules Probability Distributions MLE for Gaussian Parameter Estimation MLE and Least Squares
Probability Theory for Machine Learning Chris Cremer September 2015 Outline Motivation Probability Definitions and Rules Probability Distributions MLE for Gaussian Parameter Estimation MLE and Least Squares