Friction. Modeling, Identification, & Analysis
|
|
|
- Basil McDonald
- 6 years ago
- Views:
Transcription

1 Friction Modeling, Identification, & Analysis Objectives Understand the friction phenomenon as it relates to motion systems. Develop a control-oriented model with appropriate simplifying assumptions for the phenomenon. Determine system identification techniques for the parameters in the model. Analyze the model and run simulations using the model to demonstrate its effectiveness. Friction: Modeling, Identification, & Analysis K. Craig 1

2 Friction: Modeling, Identification, & Analysis K. Craig 2
3 Key Papers on Friction Modeling These four papers, along with the references listed in each paper, represent the state-of-the-art in friction modeling. They were all published in the IEEE Control Systems Magazine, December Characterization of Friction Force Dynamics by F. Al- Bender and J. Swevers. Modeling and Measuring Friction Effects by A. Harnoy, B. Friedland, and S. Cohn. Nanotribilogy and Nanoscale Friction by Y. Guo, Z. Qu, Y. Braiman, and J. Barhen. Revisiting the Lugre Friction Model by K. Astrom and C. Canudas-De-Wit. Friction: Modeling, Identification, & Analysis K. Craig 3
4 Background on Friction Friction, the tangential reaction force between two surfaces in contact, is one of nature s most useful phenomena. Without friction there would be no belt drives, no clutches, no wheels, and no brakes. Walking, and even standing upright on a moderately inclined surface, would be impossible. The cork would not stay in the wine bottle! However, in machinery in which friction is not the driving force, it is an undesirable parasitic phenomenon, generating heat and wasting energy. Conserving energy and sustainability are today the most compelling reasons for a mechatronics approach to design. Friction: Modeling, Identification, & Analysis K. Craig 4
5 The most promising alternative energy source is energy efficiency Machines must do more with less energy and efficiency results from many components working well together. Like any design variable, there is a price associated with efficiency, but the greater costs are incurred when efficiency is overlooked. In industrial equipment, consider the relationship between excess heat and imprecision, vibration and premature wear, thermal cycles and lifetime, energy consumption and profitability. Efficiency matters, and in motion systems, it is a collective property, resulting from many components working together. Friction: Modeling, Identification, & Analysis K. Craig 5
6 What is Ecotribology? Ecotribology: Environmentally-Acceptable Tribological Practices, Wilfried Bartz, Tribology is the study of friction and wear. To reduce friction and wear in machines, main energy culprits, the proper combination of geometry, materials, and lubrication must be employed in a design, i.e., a proper tribological approach. It has been estimated that the correct application of tribology throughout U.S. industry could save the country $500 billion annually. Saving resources and energy and reducing impact on the environment through optimum design and operation practices covering the life of a machine are the two most important aspects. Friction: Modeling, Identification, & Analysis K. Craig 6
7 When friction is the source of traction and braking, it is important to keep friction at a high level. In traction applications, the process starts with the vehicle at rest. In braking applications, the process ends with the vehicle at rest. In both applications, the behavior of friction when the velocity of the vehicle crosses zero is of little interest. In motion-control applications, the velocity of the controlled object typically crosses zero, often several times, during operation. Therefore, it is necessary to understand the behavior of friction in the vicinity of zero velocity. Friction: Modeling, Identification, & Analysis K. Craig 7
8 The challenge to good control posed by friction is often thought of as being stick-slip, which is an alternation between sliding and sticking due to static friction. Stickslip is most common when integral control is used and can prevent a machine from ever reaching its intended goal position. Other forms of frictional disturbance can be of equal or greater importance. The tracking error introduced by friction into multi-axis motion is an example. A two-axis machine will fail to accurately track a desired circular contour because as one axis goes through zero velocity, it is arrested for a moment by static friction while the other axis continues to move. Friction: Modeling, Identification, & Analysis K. Craig 8
9 Physical Model of Friction Friction Model Friction effects can be imagined as resulting from two surfaces with asperities, one inverted above the other. The motion, or tendency of motion, of one surface relative to the other causes the friction force. The height and sharpness of the asperities represent the roughness of the surfaces. Friction: Modeling, Identification, & Analysis K. Craig 9



10 Dry Surfaces Surfaces with Lubrication Lower Friction Force Friction: Modeling, Identification, & Analysis K. Craig 10



11 1 unit of force 1 unit of force 1 unit of force The same force is needed to move the block shown regardless of its orientation with respect to the ground. Friction is independent of the overall surface area. This is the 1 st Law of Friction. Friction: Modeling, Identification, & Analysis K. Craig 11




12 1 block Friction varies directly with load. This is the 2 nd Law of Friction. 1 unit of force 3 blocks 2 blocks 3 units of force 2 units of force The larger the load, the more deeply the upper surface penetrates into the lower, making it more difficult for the surfaces to move apart. Friction force depends on the normal force. Friction: Modeling, Identification, & Analysis K. Craig 12
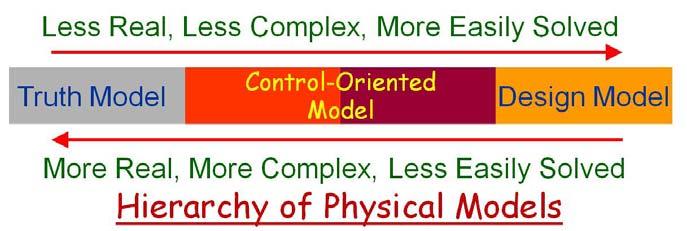
13 F = F =μ N f stick s impending motion F = F =μ N f slip k motion μ <μ k s μ N< F <μ N s f s static equilibrium Control-Oriented Model Friction: Modeling, Identification, & Analysis K. Craig 13

14 Friction: Modeling, Identification, & Analysis K. Craig 14
15 Linear Damping Effect Stribeck Effect 4 Regimes 1 No sliding elastic deformation 2 boundary lubrication 3 partial fluid lubrication 4 full fluid lubrication Enhanced Model Friction: Modeling, Identification, & Analysis K. Craig 15
16 Friction Model Example Shows effects of Viscous and Coulomb friction. pivot Consider the simple pendulum consisting of a rigid, massless rod of length l and a point mass m attached. 2 m θ + mg (sin θ ) + Bθ + Tf = 0 inertia gravity torque torque Four Cases Case 1: frictionless pivot viscous damping torque B θ Case 2: linear viscous damping torque at pivot Case 3: Coulomb friction torque T f at pivot Case 4: Case 2 & Case 3 combined Coulomb friction torque Friction: Modeling, Identification, & Analysis K. Craig 16

17 l = 1; % meters m = 1; % kg g =9.81; % meters/sec^2 T_stick = 0.2; % 0 or 0.2 N-m Average T_slip = 0.8*T_stick; % N-m B = 0.5; % B = 0 or 0.5 N-m-sec 2 m θ + mg (sin θ ) + Bθ + Tf = 0 Friction: Modeling, Identification, & Analysis K. Craig 17

18 Friction: Modeling, Identification, & Analysis K. Craig 18

19 Coulomb Friction Response Envelope: Linear Decay Viscous Friction Response Envelope: Exponential Decay Friction: Modeling, Identification, & Analysis K. Craig 19
20 Linear Viscous Friction: Exponential Decay Envelope Friction: Modeling, Identification, & Analysis K. Craig 20
21 Nonlinear Coulomb Friction: Linear Decay Envelope Friction: Modeling, Identification, & Analysis K. Craig 21
22 Coulomb + Viscous Friction Response Envelope: Between a Linear Decay and an Exponential Decay Friction: Modeling, Identification, & Analysis K. Craig 22
, but one possible outcome is stick-slip motion, as shown in the figure.")

23 Stick-slip motion is a common behavior associated with friction. A typical stick-slip experiment is to attach one end of a spring to a block sitting on an unlubricated horizontal surface. The other end of the spring is moved horizontally with a constant velocity. How will the block move? Of course, it is highly dependent on the physical system parameters (e.g., nature of the surfaces in contact, dynamics of the spring-mass system, driving velocity V 0 ), but one possible outcome is stick-slip motion, as shown in the figure. When the spring force exceeds F stick, the mass accelerates, the spring elongates, and the mass comes to rest. The process then repeats, creating the stickslip behavior. A model used to describe the friction phenomenon must be able to show this behavior. Friction: Modeling, Identification, & Analysis K. Craig 23
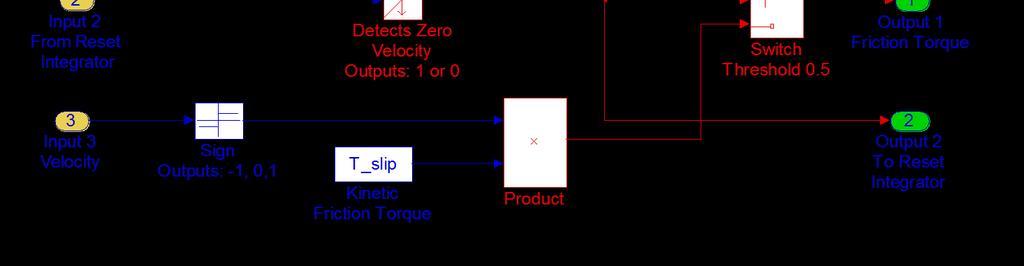
24 Friction Model Example: Stick-Slip Behavior mx + kx + Ff = kx0 Friction: Modeling, Identification, & Analysis K. Craig 24
![mx+ kx+ F = kx f 0 1 x = k(x x) F m [ ] 0 f](/docs-images/74/71410598/images/25-0.jpg "Friction: Modeling, Identification, & Analysis K.")
25 mx+ kx+ F = kx f 0 1 x = k(x x) F m [ ] 0 f Friction: Modeling, Identification, & Analysis K. Craig 25

26 Friction: Modeling, Identification, & Analysis K. Craig 26
27 Friction: Modeling, Identification, & Analysis K. Craig 27
28 Parameter Identification Static and Dynamic Coulomb Friction Torque Linear Viscous Friction Torque For a motor + load system, to determine the friction characteristics of the system, follow the following steps: Run the motor + load with a servo-amplifier in the torque mode (1 A/V). Input a trapezoid voltage profile with a period of slow linearly-increasing voltage, a period of constant voltage, and a period of slow linearly-decreasing voltage. Insure that the power supply is not saturated during the test. Record the velocity from a tachometer or encoder as a function of time during the test. See plots on next two slides for procedure. Friction: Modeling, Identification, & Analysis K. Craig 28
29 Jω+ Bω+ T = K i f t rad/s B = Ki t T ω fd t = 35.4 s t = s T fs = K i t T fd = K i t Friction: Modeling, Identification, & Analysis K. Craig 29
30 i = 0.15 A at 50 < t < 80 i = A at t = 35.4 sec i = A at t = sec Friction: Modeling, Identification, & Analysis K. Craig 30


31 Simulation to Validate Friction ID Procedure 6-Volt Brushed DC Motor J = 1.06E-6; B = 2.85E-6; Tfs = ; Tfd = 0.8*Tfs; Kt = ; Kb = ; R = 7; L = 0.120; Ka = 1; SI Units Friction: Modeling, Identification, & Analysis K. Craig 31
32 J = 1.06E-6; B = 2.85E-6; Tfs = ; Tfd = 0.8*Tfs; Kt = ; Kb = ; R = 7; L = 0.120; Ka = 1; SI Units Friction: Modeling, Identification, & Analysis K. Craig 32
33 Friction: Modeling, Identification, & Analysis K. Craig 33
Mechatronics. MANE 4490 Fall 2002 Assignment # 1
 Mechatronics MANE 4490 Fall 2002 Assignment # 1 1. For each of the physical models shown in Figure 1, derive the mathematical model (equation of motion). All displacements are measured from the static
Mechatronics MANE 4490 Fall 2002 Assignment # 1 1. For each of the physical models shown in Figure 1, derive the mathematical model (equation of motion). All displacements are measured from the static
Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation
 Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University K.
Mechatronic System Case Study: Rotary Inverted Pendulum Dynamic System Investigation Dr. Kevin Craig Greenheck Chair in Engineering Design & Professor of Mechanical Engineering Marquette University K.
Lecture 6 Friction. Friction Phenomena Types of Friction
 Lecture 6 Friction Tangential forces generated between contacting surfaces are called friction forces and occur to some degree in the interaction between all real surfaces. whenever a tendency exists for
Lecture 6 Friction Tangential forces generated between contacting surfaces are called friction forces and occur to some degree in the interaction between all real surfaces. whenever a tendency exists for
MODELING AND SIMULATION OF HYDRAULIC ACTUATOR WITH VISCOUS FRICTION
 MODELING AND SIMULATION OF HYDRAULIC ACTUATOR WITH VISCOUS FRICTION Jitendra Yadav 1, Dr. Geeta Agnihotri 1 Assistant professor, Mechanical Engineering Department, University of petroleum and energy studies,
MODELING AND SIMULATION OF HYDRAULIC ACTUATOR WITH VISCOUS FRICTION Jitendra Yadav 1, Dr. Geeta Agnihotri 1 Assistant professor, Mechanical Engineering Department, University of petroleum and energy studies,
Dry Friction Static vs. Kinetic Angles
 Outline: Types of Friction Dry Friction Static vs. Kinetic Angles Applications of Friction 1 Contacting surfaces typically support normal and tangential forces Friction is a tangential force Friction occurs
Outline: Types of Friction Dry Friction Static vs. Kinetic Angles Applications of Friction 1 Contacting surfaces typically support normal and tangential forces Friction is a tangential force Friction occurs
Outline: Types of Friction Dry Friction Static vs. Kinetic Angles Applications of Friction. ENGR 1205 Appendix B
 Outline: Types of Friction Dry Friction Static vs. Kinetic Angles Applications of Friction ENGR 1205 Appendix B 1 Contacting surfaces typically support normal and tangential forces Friction is a tangential
Outline: Types of Friction Dry Friction Static vs. Kinetic Angles Applications of Friction ENGR 1205 Appendix B 1 Contacting surfaces typically support normal and tangential forces Friction is a tangential
Chapter 14 Oscillations. Copyright 2009 Pearson Education, Inc.
 Chapter 14 Oscillations Oscillations of a Spring Simple Harmonic Motion Energy in the Simple Harmonic Oscillator Simple Harmonic Motion Related to Uniform Circular Motion The Simple Pendulum The Physical
Chapter 14 Oscillations Oscillations of a Spring Simple Harmonic Motion Energy in the Simple Harmonic Oscillator Simple Harmonic Motion Related to Uniform Circular Motion The Simple Pendulum The Physical
CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5
 1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
1 / 36 CEE 271: Applied Mechanics II, Dynamics Lecture 25: Ch.17, Sec.4-5 Prof. Albert S. Kim Civil and Environmental Engineering, University of Hawaii at Manoa Date: 2 / 36 EQUATIONS OF MOTION: ROTATION
However, the friction forces are limited in magnitude and will not prevent motion if sufficiently large forces are applied.
 FRICTION 1 Introduction In preceding chapters, it was assumed that surfaces in contact were either frictionless (surfaces could move freely with respect to each other) or rough (tangential forces prevent
FRICTION 1 Introduction In preceding chapters, it was assumed that surfaces in contact were either frictionless (surfaces could move freely with respect to each other) or rough (tangential forces prevent
Chapter 14 Periodic Motion
 Chapter 14 Periodic Motion 1 Describing Oscillation First, we want to describe the kinematical and dynamical quantities associated with Simple Harmonic Motion (SHM), for example, x, v x, a x, and F x.
Chapter 14 Periodic Motion 1 Describing Oscillation First, we want to describe the kinematical and dynamical quantities associated with Simple Harmonic Motion (SHM), for example, x, v x, a x, and F x.
11. (7 points: Choose up to 3 answers) What is the tension,!, in the string? a.! = 0.10 N b.! = 0.21 N c.! = 0.29 N d.! = N e.! = 0.
 What is the tension,!, in the string? a.! = 0.10 N b.! = 0.21 N c.! = 0.29 N d.! = N e.! = 0.") A harmonic wave propagates horizontally along a taut string of length! = 8.0 m and mass! = 0.23 kg. The vertical displacement of the string along its length is given by!!,! = 0.1!m cos 1.5!!! +!0.8!!,
A harmonic wave propagates horizontally along a taut string of length! = 8.0 m and mass! = 0.23 kg. The vertical displacement of the string along its length is given by!!,! = 0.1!m cos 1.5!!! +!0.8!!,
Concept Question: Normal Force
 Concept Question: Normal Force Consider a person standing in an elevator that is accelerating upward. The upward normal force N exerted by the elevator floor on the person is 1. larger than 2. identical
Concept Question: Normal Force Consider a person standing in an elevator that is accelerating upward. The upward normal force N exerted by the elevator floor on the person is 1. larger than 2. identical
Chapter 12. Recall that when a spring is stretched a distance x, it will pull back with a force given by: F = -kx
 Chapter 1 Lecture Notes Chapter 1 Oscillatory Motion Recall that when a spring is stretched a distance x, it will pull back with a force given by: F = -kx When the mass is released, the spring will pull
Chapter 1 Lecture Notes Chapter 1 Oscillatory Motion Recall that when a spring is stretched a distance x, it will pull back with a force given by: F = -kx When the mass is released, the spring will pull
AP Physics Multiple Choice Practice Torque
 AP Physics Multiple Choice Practice Torque 1. A uniform meterstick of mass 0.20 kg is pivoted at the 40 cm mark. Where should one hang a mass of 0.50 kg to balance the stick? (A) 16 cm (B) 36 cm (C) 44
AP Physics Multiple Choice Practice Torque 1. A uniform meterstick of mass 0.20 kg is pivoted at the 40 cm mark. Where should one hang a mass of 0.50 kg to balance the stick? (A) 16 cm (B) 36 cm (C) 44
Physics B Newton s Laws AP Review Packet
 Force A force is a push or pull on an object. Forces cause an object to accelerate To speed up To slow down To change direction Unit: Newton (SI system) Newton s First Law The Law of Inertia. A body in
Force A force is a push or pull on an object. Forces cause an object to accelerate To speed up To slow down To change direction Unit: Newton (SI system) Newton s First Law The Law of Inertia. A body in
Chapter 14. Oscillations. Oscillations Introductory Terminology Simple Harmonic Motion:
 Chapter 14 Oscillations Oscillations Introductory Terminology Simple Harmonic Motion: Kinematics Energy Examples of Simple Harmonic Oscillators Damped and Forced Oscillations. Resonance. Periodic Motion
Chapter 14 Oscillations Oscillations Introductory Terminology Simple Harmonic Motion: Kinematics Energy Examples of Simple Harmonic Oscillators Damped and Forced Oscillations. Resonance. Periodic Motion
On the LuGre Model and Friction-Induced Hysteresis
 Proceedings of the 6 American Control Conference Minneapolis, Minnesota, USA, June 4-6, 6 ThB3.4 On the LuGre Model and Friction-nduced Hysteresis Ashwani K. Padthe, JinHyoung Oh, and Dennis S. Bernstein
Proceedings of the 6 American Control Conference Minneapolis, Minnesota, USA, June 4-6, 6 ThB3.4 On the LuGre Model and Friction-nduced Hysteresis Ashwani K. Padthe, JinHyoung Oh, and Dennis S. Bernstein
AP Physics QUIZ Chapters 10
 Name: 1. Torque is the rotational analogue of (A) Kinetic Energy (B) Linear Momentum (C) Acceleration (D) Force (E) Mass A 5-kilogram sphere is connected to a 10-kilogram sphere by a rigid rod of negligible
Name: 1. Torque is the rotational analogue of (A) Kinetic Energy (B) Linear Momentum (C) Acceleration (D) Force (E) Mass A 5-kilogram sphere is connected to a 10-kilogram sphere by a rigid rod of negligible
PHY218 SPRING 2016 Review for Final Exam: Week 14 Final Review: Chapters 1-11, 13-14
 Final Review: Chapters 1-11, 13-14 These are selected problems that you are to solve independently or in a team of 2-3 in order to better prepare for your Final Exam 1 Problem 1: Chasing a motorist This
Final Review: Chapters 1-11, 13-14 These are selected problems that you are to solve independently or in a team of 2-3 in order to better prepare for your Final Exam 1 Problem 1: Chasing a motorist This
Tribology in Industry. Some Aspects Concerning the Behaviour of Friction Materials at Low and Very Low Sliding Speeds
 RESEARCH Vol. 37, No. 3 (2015) 374-379 Tribology in Industry www.tribology.fink.rs Some Aspects Concerning the Behaviour of Friction Materials at Low and Very Low Sliding Speeds N.A. Stoica a, A. Tudor
RESEARCH Vol. 37, No. 3 (2015) 374-379 Tribology in Industry www.tribology.fink.rs Some Aspects Concerning the Behaviour of Friction Materials at Low and Very Low Sliding Speeds N.A. Stoica a, A. Tudor
MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question.
 Exam Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) A 4.8-kg block attached to a spring executes simple harmonic motion on a frictionless
Exam Name MULTIPLE CHOICE. Choose the one alternative that best completes the statement or answers the question. 1) A 4.8-kg block attached to a spring executes simple harmonic motion on a frictionless
ECEN 420 LINEAR CONTROL SYSTEMS. Lecture 6 Mathematical Representation of Physical Systems II 1/67
 1/67 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 6 Mathematical Representation of Physical Systems II State Variable Models for Dynamic Systems u 1 u 2 u ṙ. Internal Variables x 1, x 2 x n y 1 y 2. y m Figure
1/67 ECEN 420 LINEAR CONTROL SYSTEMS Lecture 6 Mathematical Representation of Physical Systems II State Variable Models for Dynamic Systems u 1 u 2 u ṙ. Internal Variables x 1, x 2 x n y 1 y 2. y m Figure
= y(x, t) =A cos (!t + kx)
 =A cos (!t + kx)") A harmonic wave propagates horizontally along a taut string of length L = 8.0 m and mass M = 0.23 kg. The vertical displacement of the string along its length is given by y(x, t) = 0. m cos(.5 t + 0.8
A harmonic wave propagates horizontally along a taut string of length L = 8.0 m and mass M = 0.23 kg. The vertical displacement of the string along its length is given by y(x, t) = 0. m cos(.5 t + 0.8
AP Physics. Harmonic Motion. Multiple Choice. Test E
 AP Physics Harmonic Motion Multiple Choice Test E A 0.10-Kg block is attached to a spring, initially unstretched, of force constant k = 40 N m as shown below. The block is released from rest at t = 0 sec.
AP Physics Harmonic Motion Multiple Choice Test E A 0.10-Kg block is attached to a spring, initially unstretched, of force constant k = 40 N m as shown below. The block is released from rest at t = 0 sec.
Physics 23 Exam 3 April 2, 2009
 1. A string is tied to a doorknob 0.79 m from the hinge as shown in the figure. At the instant shown, the force applied to the string is 5.0 N. What is the torque on the door? A) 3.3 N m B) 2.2 N m C)
1. A string is tied to a doorknob 0.79 m from the hinge as shown in the figure. At the instant shown, the force applied to the string is 5.0 N. What is the torque on the door? A) 3.3 N m B) 2.2 N m C)
FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Saturday, 14 December 2013, 1PM to 4 PM, AT 1003
 FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Saturday, 14 December 2013, 1PM to 4 PM, AT 1003 NAME: STUDENT ID: INSTRUCTION 1. This exam booklet has 14 pages. Make sure none are missing 2. There is
FALL TERM EXAM, PHYS 1211, INTRODUCTORY PHYSICS I Saturday, 14 December 2013, 1PM to 4 PM, AT 1003 NAME: STUDENT ID: INSTRUCTION 1. This exam booklet has 14 pages. Make sure none are missing 2. There is
Chapter 8. Centripetal Force and The Law of Gravity
 Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
Chapter 8 Centripetal Force and The Law of Gravity Centripetal Acceleration An object traveling in a circle, even though it moves with a constant speed, will have an acceleration The centripetal acceleration
TOPIC E: OSCILLATIONS EXAMPLES SPRING Q1. Find general solutions for the following differential equations:
 TOPIC E: OSCILLATIONS EXAMPLES SPRING 2019 Mathematics of Oscillating Systems Q1. Find general solutions for the following differential equations: Undamped Free Vibration Q2. A 4 g mass is suspended by
TOPIC E: OSCILLATIONS EXAMPLES SPRING 2019 Mathematics of Oscillating Systems Q1. Find general solutions for the following differential equations: Undamped Free Vibration Q2. A 4 g mass is suspended by
Physics 12. Unit 5 Circular Motion and Gravitation Part 1
 Physics 12 Unit 5 Circular Motion and Gravitation Part 1 1. Nonlinear motions According to the Newton s first law, an object remains its tendency of motion as long as there is no external force acting
Physics 12 Unit 5 Circular Motion and Gravitation Part 1 1. Nonlinear motions According to the Newton s first law, an object remains its tendency of motion as long as there is no external force acting
A. B. C. D. E. v x. ΣF x
 Q4.3 The graph to the right shows the velocity of an object as a function of time. Which of the graphs below best shows the net force versus time for this object? 0 v x t ΣF x ΣF x ΣF x ΣF x ΣF x 0 t 0
Q4.3 The graph to the right shows the velocity of an object as a function of time. Which of the graphs below best shows the net force versus time for this object? 0 v x t ΣF x ΣF x ΣF x ΣF x ΣF x 0 t 0
Rolling, Torque & Angular Momentum
 PHYS 101 Previous Exam Problems CHAPTER 11 Rolling, Torque & Angular Momentum Rolling motion Torque Angular momentum Conservation of angular momentum 1. A uniform hoop (ring) is rolling smoothly from the
PHYS 101 Previous Exam Problems CHAPTER 11 Rolling, Torque & Angular Momentum Rolling motion Torque Angular momentum Conservation of angular momentum 1. A uniform hoop (ring) is rolling smoothly from the
Stator/Rotor Interface Analysis for Piezoelectric Motors
 Stator/Rotor Interface Analysis for Piezoelectric Motors K Harmouch, Yves Bernard, Laurent Daniel To cite this version: K Harmouch, Yves Bernard, Laurent Daniel. Stator/Rotor Interface Analysis for Piezoelectric
Stator/Rotor Interface Analysis for Piezoelectric Motors K Harmouch, Yves Bernard, Laurent Daniel To cite this version: K Harmouch, Yves Bernard, Laurent Daniel. Stator/Rotor Interface Analysis for Piezoelectric
Physics Mechanics. Lecture 32 Oscillations II
 Physics 170 - Mechanics Lecture 32 Oscillations II Gravitational Potential Energy A plot of the gravitational potential energy U g looks like this: Energy Conservation Total mechanical energy of an object
Physics 170 - Mechanics Lecture 32 Oscillations II Gravitational Potential Energy A plot of the gravitational potential energy U g looks like this: Energy Conservation Total mechanical energy of an object
Use the following to answer question 1:
 Use the following to answer question 1: On an amusement park ride, passengers are seated in a horizontal circle of radius 7.5 m. The seats begin from rest and are uniformly accelerated for 21 seconds to
Use the following to answer question 1: On an amusement park ride, passengers are seated in a horizontal circle of radius 7.5 m. The seats begin from rest and are uniformly accelerated for 21 seconds to
Physics Exam 2 October 11, 2007
 INSTRUCTIONS: Write your NAME on the front of the blue exam booklet. The exam is closed book, and you may have only pens/pencils and a calculator (no stored equations or programs and no graphing). Show
INSTRUCTIONS: Write your NAME on the front of the blue exam booklet. The exam is closed book, and you may have only pens/pencils and a calculator (no stored equations or programs and no graphing). Show
STATICS. Friction VECTOR MECHANICS FOR ENGINEERS: Eighth Edition CHAPTER. Ferdinand P. Beer E. Russell Johnston, Jr.
 Eighth E 8 Friction CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Contents Introduction Laws of Dry Friction.
Eighth E 8 Friction CHAPTER VECTOR MECHANICS FOR ENGINEERS: STATICS Ferdinand P. Beer E. Russell Johnston, Jr. Lecture Notes: J. Walt Oler Texas Tech University Contents Introduction Laws of Dry Friction.
4) Vector = and vector = What is vector = +? A) B) C) D) E)
 Vector = and vector = What is vector = +? A) B) C) D) E)") 1) Suppose that an object is moving with constant nonzero acceleration. Which of the following is an accurate statement concerning its motion? A) In equal times its speed changes by equal amounts. B) In
1) Suppose that an object is moving with constant nonzero acceleration. Which of the following is an accurate statement concerning its motion? A) In equal times its speed changes by equal amounts. B) In
41514 Dynamics of Machinery
 41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
41514 Dynamics of Machinery Theory, Experiment, Phenomenology and Industrial Applications Ilmar Ferreira Santos 1. Recapitulation Mathematical Modeling & Steps 2. Example System of Particle 3. Example
The student will experimentally determine the parameters to represent the behavior of a damped oscillatory system of one degree of freedom.
 Practice 3 NAME STUDENT ID LAB GROUP PROFESSOR INSTRUCTOR Vibrations of systems of one degree of freedom with damping QUIZ 10% PARTICIPATION & PRESENTATION 5% INVESTIGATION 10% DESIGN PROBLEM 15% CALCULATIONS
Practice 3 NAME STUDENT ID LAB GROUP PROFESSOR INSTRUCTOR Vibrations of systems of one degree of freedom with damping QUIZ 10% PARTICIPATION & PRESENTATION 5% INVESTIGATION 10% DESIGN PROBLEM 15% CALCULATIONS
VTU-NPTEL-NMEICT Project
 MODULE-II --- SINGLE DOF FREE S VTU-NPTEL-NMEICT Project Progress Report The Project on Development of Remaining Three Quadrants to NPTEL Phase-I under grant in aid NMEICT, MHRD, New Delhi SME Name : Course
MODULE-II --- SINGLE DOF FREE S VTU-NPTEL-NMEICT Project Progress Report The Project on Development of Remaining Three Quadrants to NPTEL Phase-I under grant in aid NMEICT, MHRD, New Delhi SME Name : Course
Actually, no perfectly frictionless surface exists. For two surfaces in contact, tangential forces, called friction forces, will develop if one
 Chapter 8 Friction Actually, no perfectly frictionless surface exists. For two surfaces in contact, tangential forces, called friction forces, will develop if one attempts to move one relative to the other.
Chapter 8 Friction Actually, no perfectly frictionless surface exists. For two surfaces in contact, tangential forces, called friction forces, will develop if one attempts to move one relative to the other.
1 MR SAMPLE EXAM 3 FALL 2013
 SAMPLE EXAM 3 FALL 013 1. A merry-go-round rotates from rest with an angular acceleration of 1.56 rad/s. How long does it take to rotate through the first rev? A) s B) 4 s C) 6 s D) 8 s E) 10 s. A wheel,
SAMPLE EXAM 3 FALL 013 1. A merry-go-round rotates from rest with an angular acceleration of 1.56 rad/s. How long does it take to rotate through the first rev? A) s B) 4 s C) 6 s D) 8 s E) 10 s. A wheel,
Oscillations. Oscillations and Simple Harmonic Motion
 Oscillations AP Physics C Oscillations and Simple Harmonic Motion 1 Equilibrium and Oscillations A marble that is free to roll inside a spherical bowl has an equilibrium position at the bottom of the bowl
Oscillations AP Physics C Oscillations and Simple Harmonic Motion 1 Equilibrium and Oscillations A marble that is free to roll inside a spherical bowl has an equilibrium position at the bottom of the bowl
Lecture 8: Friction Part 1 Friction Phenomena
 Lecture 8: Friction Part 1 Friction Phenomena Friction is a force which is generated between. Its direction is always to that of the motion, or tendency for a motion. F mg P N Figure 1 Figure 1 shows a
Lecture 8: Friction Part 1 Friction Phenomena Friction is a force which is generated between. Its direction is always to that of the motion, or tendency for a motion. F mg P N Figure 1 Figure 1 shows a
Phys101 Second Major-173 Zero Version Coordinator: Dr. M. Al-Kuhaili Thursday, August 02, 2018 Page: 1. = 159 kw
 Coordinator: Dr. M. Al-Kuhaili Thursday, August 2, 218 Page: 1 Q1. A car, of mass 23 kg, reaches a speed of 29. m/s in 6.1 s starting from rest. What is the average power used by the engine during the
Coordinator: Dr. M. Al-Kuhaili Thursday, August 2, 218 Page: 1 Q1. A car, of mass 23 kg, reaches a speed of 29. m/s in 6.1 s starting from rest. What is the average power used by the engine during the
Course Material Engineering Mechanics. Topic: Friction
 Course Material Engineering Mechanics Topic: Friction by Dr.M.Madhavi, Professor, Department of Mechanical Engineering, M.V.S.R.Engineering College, Hyderabad. Contents PART I : Introduction to Friction
Course Material Engineering Mechanics Topic: Friction by Dr.M.Madhavi, Professor, Department of Mechanical Engineering, M.V.S.R.Engineering College, Hyderabad. Contents PART I : Introduction to Friction
 第 1 頁, 共 7 頁 Chap10 1. Test Bank, Question 3 One revolution per minute is about: 0.0524 rad/s 0.105 rad/s 0.95 rad/s 1.57 rad/s 6.28 rad/s 2. *Chapter 10, Problem 8 The angular acceleration of a wheel
第 1 頁, 共 7 頁 Chap10 1. Test Bank, Question 3 One revolution per minute is about: 0.0524 rad/s 0.105 rad/s 0.95 rad/s 1.57 rad/s 6.28 rad/s 2. *Chapter 10, Problem 8 The angular acceleration of a wheel
6. Find the net torque on the wheel in Figure about the axle through O if a = 10.0 cm and b = 25.0 cm.
 1. During a certain period of time, the angular position of a swinging door is described by θ = 5.00 + 10.0t + 2.00t 2, where θ is in radians and t is in seconds. Determine the angular position, angular
1. During a certain period of time, the angular position of a swinging door is described by θ = 5.00 + 10.0t + 2.00t 2, where θ is in radians and t is in seconds. Determine the angular position, angular
Test 7 wersja angielska
 Test 7 wersja angielska 7.1A One revolution is the same as: A) 1 rad B) 57 rad C) π/2 rad D) π rad E) 2π rad 7.2A. If a wheel turns with constant angular speed then: A) each point on its rim moves with
Test 7 wersja angielska 7.1A One revolution is the same as: A) 1 rad B) 57 rad C) π/2 rad D) π rad E) 2π rad 7.2A. If a wheel turns with constant angular speed then: A) each point on its rim moves with
Chapter 8: Momentum, Impulse, & Collisions. Newton s second law in terms of momentum:
 linear momentum: Chapter 8: Momentum, Impulse, & Collisions Newton s second law in terms of momentum: impulse: Under what SPECIFIC condition is linear momentum conserved? (The answer does not involve collisions.)
linear momentum: Chapter 8: Momentum, Impulse, & Collisions Newton s second law in terms of momentum: impulse: Under what SPECIFIC condition is linear momentum conserved? (The answer does not involve collisions.)
Physics 41 HW Set 1 Chapter 15 Serway 8 th ( 7 th )
") Conceptual Q: 4 (7), 7 (), 8 (6) Physics 4 HW Set Chapter 5 Serway 8 th ( 7 th ) Q4(7) Answer (c). The equilibrium position is 5 cm below the starting point. The motion is symmetric about the equilibrium
Conceptual Q: 4 (7), 7 (), 8 (6) Physics 4 HW Set Chapter 5 Serway 8 th ( 7 th ) Q4(7) Answer (c). The equilibrium position is 5 cm below the starting point. The motion is symmetric about the equilibrium
Overview. Dry Friction Wedges Flatbelts Screws Bearings Rolling Resistance
 Friction Chapter 8 Overview Dry Friction Wedges Flatbelts Screws Bearings Rolling Resistance Dry Friction Friction is defined as a force of resistance acting on a body which prevents slipping of the body
Friction Chapter 8 Overview Dry Friction Wedges Flatbelts Screws Bearings Rolling Resistance Dry Friction Friction is defined as a force of resistance acting on a body which prevents slipping of the body
= o + t = ot + ½ t 2 = o + 2
 Chapters 8-9 Rotational Kinematics and Dynamics Rotational motion Rotational motion refers to the motion of an object or system that spins about an axis. The axis of rotation is the line about which the
Chapters 8-9 Rotational Kinematics and Dynamics Rotational motion Rotational motion refers to the motion of an object or system that spins about an axis. The axis of rotation is the line about which the
Big Ideas 3 & 5: Circular Motion and Rotation 1 AP Physics 1
 Big Ideas 3 & 5: Circular Motion and Rotation 1 AP Physics 1 1. A 50-kg boy and a 40-kg girl sit on opposite ends of a 3-meter see-saw. How far from the girl should the fulcrum be placed in order for the
Big Ideas 3 & 5: Circular Motion and Rotation 1 AP Physics 1 1. A 50-kg boy and a 40-kg girl sit on opposite ends of a 3-meter see-saw. How far from the girl should the fulcrum be placed in order for the
PHYSICS 1 Simple Harmonic Motion
 Advanced Placement PHYSICS 1 Simple Harmonic Motion Student 014-015 What I Absolutely Have to Know to Survive the AP* Exam Whenever the acceleration of an object is proportional to its displacement and
Advanced Placement PHYSICS 1 Simple Harmonic Motion Student 014-015 What I Absolutely Have to Know to Survive the AP* Exam Whenever the acceleration of an object is proportional to its displacement and
TOPIC E: OSCILLATIONS SPRING 2019
 TOPIC E: OSCILLATIONS SPRING 2019 1. Introduction 1.1 Overview 1.2 Degrees of freedom 1.3 Simple harmonic motion 2. Undamped free oscillation 2.1 Generalised mass-spring system: simple harmonic motion
TOPIC E: OSCILLATIONS SPRING 2019 1. Introduction 1.1 Overview 1.2 Degrees of freedom 1.3 Simple harmonic motion 2. Undamped free oscillation 2.1 Generalised mass-spring system: simple harmonic motion
PHYSICS 221, FALL 2011 EXAM #2 SOLUTIONS WEDNESDAY, NOVEMBER 2, 2011
 PHYSICS 1, FALL 011 EXAM SOLUTIONS WEDNESDAY, NOVEMBER, 011 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively. In this
PHYSICS 1, FALL 011 EXAM SOLUTIONS WEDNESDAY, NOVEMBER, 011 Note: The unit vectors in the +x, +y, and +z directions of a right-handed Cartesian coordinate system are î, ĵ, and ˆk, respectively. In this
Final Examination Thursday May Please initial the statement below to show that you have read it
 EN40: Dynamics and Vibrations Final Examination Thursday May 0 010 Division of Engineering rown University NME: General Instructions No collaboration of any kind is permitted on this examination. You may
EN40: Dynamics and Vibrations Final Examination Thursday May 0 010 Division of Engineering rown University NME: General Instructions No collaboration of any kind is permitted on this examination. You may
Physics 211 Week 10. Statics: Walking the Plank (Solution)
") Statics: Walking the Plank (Solution) A uniform horizontal beam 8 m long is attached by a frictionless pivot to a wall. A cable making an angle of 37 o, attached to the beam 5 m from the pivot point, supports
Statics: Walking the Plank (Solution) A uniform horizontal beam 8 m long is attached by a frictionless pivot to a wall. A cable making an angle of 37 o, attached to the beam 5 m from the pivot point, supports
Motion Control. Laboratory assignment. Case study. Lectures. compliance, backlash and nonlinear friction. control strategies to improve performance
 436-459 Advanced Control and Automation Motion Control Lectures traditional CNC control architecture modelling of components dynamic response of axes effects on contouring performance control strategies
436-459 Advanced Control and Automation Motion Control Lectures traditional CNC control architecture modelling of components dynamic response of axes effects on contouring performance control strategies
In the presence of viscous damping, a more generalized form of the Lagrange s equation of motion can be written as
 2 MODELING Once the control target is identified, which includes the state variable to be controlled (ex. speed, position, temperature, flow rate, etc), and once the system drives are identified (ex. force,
2 MODELING Once the control target is identified, which includes the state variable to be controlled (ex. speed, position, temperature, flow rate, etc), and once the system drives are identified (ex. force,
Q1. Which of the following is the correct combination of dimensions for energy?
 Tuesday, June 15, 2010 Page: 1 Q1. Which of the following is the correct combination of dimensions for energy? A) ML 2 /T 2 B) LT 2 /M C) MLT D) M 2 L 3 T E) ML/T 2 Q2. Two cars are initially 150 kilometers
Tuesday, June 15, 2010 Page: 1 Q1. Which of the following is the correct combination of dimensions for energy? A) ML 2 /T 2 B) LT 2 /M C) MLT D) M 2 L 3 T E) ML/T 2 Q2. Two cars are initially 150 kilometers
Chapter 15. Oscillatory Motion
 Chapter 15 Oscillatory Motion Part 2 Oscillations and Mechanical Waves Periodic motion is the repeating motion of an object in which it continues to return to a given position after a fixed time interval.
Chapter 15 Oscillatory Motion Part 2 Oscillations and Mechanical Waves Periodic motion is the repeating motion of an object in which it continues to return to a given position after a fixed time interval.
Pre-AP Physics Review Problems
 Pre-AP Physics Review Problems SECTION ONE: MULTIPLE-CHOICE QUESTIONS (50x2=100 points) 1. The graph above shows the velocity versus time for an object moving in a straight line. At what time after t =
Pre-AP Physics Review Problems SECTION ONE: MULTIPLE-CHOICE QUESTIONS (50x2=100 points) 1. The graph above shows the velocity versus time for an object moving in a straight line. At what time after t =
Physics for Scientist and Engineers third edition Rotational Motion About a Fixed Axis Problems
 A particular bird s eye can just distinguish objects that subtend an angle no smaller than about 3 E -4 rad, A) How many degrees is this B) How small an object can the bird just distinguish when flying
A particular bird s eye can just distinguish objects that subtend an angle no smaller than about 3 E -4 rad, A) How many degrees is this B) How small an object can the bird just distinguish when flying
Oscillations. PHYS 101 Previous Exam Problems CHAPTER. Simple harmonic motion Mass-spring system Energy in SHM Pendulums
 PHYS 101 Previous Exam Problems CHAPTER 15 Oscillations Simple harmonic motion Mass-spring system Energy in SHM Pendulums 1. The displacement of a particle oscillating along the x axis is given as a function
PHYS 101 Previous Exam Problems CHAPTER 15 Oscillations Simple harmonic motion Mass-spring system Energy in SHM Pendulums 1. The displacement of a particle oscillating along the x axis is given as a function
is acting on a body of mass m = 3.0 kg and changes its velocity from an initial
 PHYS 101 second major Exam Term 102 (Zero Version) Q1. A 15.0-kg block is pulled over a rough, horizontal surface by a constant force of 70.0 N acting at an angle of 20.0 above the horizontal. The block
PHYS 101 second major Exam Term 102 (Zero Version) Q1. A 15.0-kg block is pulled over a rough, horizontal surface by a constant force of 70.0 N acting at an angle of 20.0 above the horizontal. The block
CHAPTER 12 OSCILLATORY MOTION
 CHAPTER 1 OSCILLATORY MOTION Before starting the discussion of the chapter s concepts it is worth to define some terms we will use frequently in this chapter: 1. The period of the motion, T, is the time
CHAPTER 1 OSCILLATORY MOTION Before starting the discussion of the chapter s concepts it is worth to define some terms we will use frequently in this chapter: 1. The period of the motion, T, is the time
Physics 2210 Homework 18 Spring 2015
 Physics 2210 Homework 18 Spring 2015 Charles Jui April 12, 2015 IE Sphere Incline Wording A solid sphere of uniform density starts from rest and rolls without slipping down an inclined plane with angle
Physics 2210 Homework 18 Spring 2015 Charles Jui April 12, 2015 IE Sphere Incline Wording A solid sphere of uniform density starts from rest and rolls without slipping down an inclined plane with angle
Sample Final Exam 02 Physics 106 (Answers on last page)
") Sample Final Exam 02 Physics 106 (Answers on last page) Name (Print): 4 Digit ID: Section: Instructions: 1. There are 30 multiple choice questions on the test. There is no penalty for guessing, so you
Sample Final Exam 02 Physics 106 (Answers on last page) Name (Print): 4 Digit ID: Section: Instructions: 1. There are 30 multiple choice questions on the test. There is no penalty for guessing, so you
Coupled Drive Apparatus Modelling and Simulation
 University of Ljubljana Faculty of Electrical Engineering Victor Centellas Gil Coupled Drive Apparatus Modelling and Simulation Diploma thesis Menthor: prof. dr. Maja Atanasijević-Kunc Ljubljana, 2015
University of Ljubljana Faculty of Electrical Engineering Victor Centellas Gil Coupled Drive Apparatus Modelling and Simulation Diploma thesis Menthor: prof. dr. Maja Atanasijević-Kunc Ljubljana, 2015
2.003 Engineering Dynamics Problem Set 10 with answer to the concept questions
 .003 Engineering Dynamics Problem Set 10 with answer to the concept questions Problem 1 Figure 1. Cart with a slender rod A slender rod of length l (m) and mass m (0.5kg)is attached by a frictionless pivot
.003 Engineering Dynamics Problem Set 10 with answer to the concept questions Problem 1 Figure 1. Cart with a slender rod A slender rod of length l (m) and mass m (0.5kg)is attached by a frictionless pivot
Exam 3 Practice Solutions
 Exam 3 Practice Solutions Multiple Choice 1. A thin hoop, a solid disk, and a solid sphere, each with the same mass and radius, are at rest at the top of an inclined plane. If all three are released at
Exam 3 Practice Solutions Multiple Choice 1. A thin hoop, a solid disk, and a solid sphere, each with the same mass and radius, are at rest at the top of an inclined plane. If all three are released at
Sample Physics Placement Exam
 Sample Physics 130-1 Placement Exam A. Multiple Choice Questions: 1. A cable is used to take construction equipment from the ground to the top of a tall building. During the trip up, when (if ever) is
Sample Physics 130-1 Placement Exam A. Multiple Choice Questions: 1. A cable is used to take construction equipment from the ground to the top of a tall building. During the trip up, when (if ever) is
Problem Set x Classical Mechanics, Fall 2016 Massachusetts Institute of Technology. 1. Moment of Inertia: Disc and Washer
 8.01x Classical Mechanics, Fall 2016 Massachusetts Institute of Technology Problem Set 10 1. Moment of Inertia: Disc and Washer (a) A thin uniform disc of mass M and radius R is mounted on an axis passing
8.01x Classical Mechanics, Fall 2016 Massachusetts Institute of Technology Problem Set 10 1. Moment of Inertia: Disc and Washer (a) A thin uniform disc of mass M and radius R is mounted on an axis passing
Physics 201. Professor P. Q. Hung. 311B, Physics Building. Physics 201 p. 1/1
 Physics 201 p. 1/1 Physics 201 Professor P. Q. Hung 311B, Physics Building Physics 201 p. 2/1 Rotational Kinematics and Energy Rotational Kinetic Energy, Moment of Inertia All elements inside the rigid
Physics 201 p. 1/1 Physics 201 Professor P. Q. Hung 311B, Physics Building Physics 201 p. 2/1 Rotational Kinematics and Energy Rotational Kinetic Energy, Moment of Inertia All elements inside the rigid
Lectures Chapter 10 (Cutnell & Johnson, Physics 7 th edition)
") PH 201-4A spring 2007 Simple Harmonic Motion Lectures 24-25 Chapter 10 (Cutnell & Johnson, Physics 7 th edition) 1 The Ideal Spring Springs are objects that exhibit elastic behavior. It will return back
PH 201-4A spring 2007 Simple Harmonic Motion Lectures 24-25 Chapter 10 (Cutnell & Johnson, Physics 7 th edition) 1 The Ideal Spring Springs are objects that exhibit elastic behavior. It will return back
Name Date Period PROBLEM SET: ROTATIONAL DYNAMICS
 Accelerated Physics Rotational Dynamics Problem Set Page 1 of 5 Name Date Period PROBLEM SET: ROTATIONAL DYNAMICS Directions: Show all work on a separate piece of paper. Box your final answer. Don t forget
Accelerated Physics Rotational Dynamics Problem Set Page 1 of 5 Name Date Period PROBLEM SET: ROTATIONAL DYNAMICS Directions: Show all work on a separate piece of paper. Box your final answer. Don t forget
Name (please print): UW ID# score last first
: UW ID# score last first") Name (please print): UW ID# score last first Question I. (20 pts) Projectile motion A ball of mass 0.3 kg is thrown at an angle of 30 o above the horizontal. Ignore air resistance. It hits the ground 100
Name (please print): UW ID# score last first Question I. (20 pts) Projectile motion A ball of mass 0.3 kg is thrown at an angle of 30 o above the horizontal. Ignore air resistance. It hits the ground 100
Unforced Oscillations
 Unforced Oscillations Simple Harmonic Motion Hooke s Law Newton s Second Law Method of Force Competition Visualization of Harmonic Motion Phase-Amplitude Conversion The Simple Pendulum and The Linearized
Unforced Oscillations Simple Harmonic Motion Hooke s Law Newton s Second Law Method of Force Competition Visualization of Harmonic Motion Phase-Amplitude Conversion The Simple Pendulum and The Linearized
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Introduction to vibration
 Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Introduction to vibration Module 15 Lecture 38 Vibration of Rigid Bodies Part-1 Today,
Engineering Mechanics Prof. U. S. Dixit Department of Mechanical Engineering Indian Institute of Technology, Guwahati Introduction to vibration Module 15 Lecture 38 Vibration of Rigid Bodies Part-1 Today,
(1) +0.2 m/s (2) +0.4 m/s (3) +0.6 m/s (4) +1 m/s (5) +0.8 m/s
 +0.2 m/s (2) +0.4 m/s (3) +0.6 m/s (4) +1 m/s (5) +0.8 m/s") 77777 77777 Instructor: Biswas/Ihas/Whiting PHYSICS DEPARTMENT PHY 2053 Exam 2, 120 minutes November 13, 2009 Name (print, last first): Signature: On my honor, I have neither given nor received unauthorized
77777 77777 Instructor: Biswas/Ihas/Whiting PHYSICS DEPARTMENT PHY 2053 Exam 2, 120 minutes November 13, 2009 Name (print, last first): Signature: On my honor, I have neither given nor received unauthorized
SOLUTION 8 7. To hold lever: a+ M O = 0; F B (0.15) - 5 = 0; F B = N. Require = N N B = N 0.3. Lever,
 - 5 = 0; F B = N. Require = N N B = N 0.3. Lever,") 8 3. If the coefficient of static friction at is m s = 0.4 and the collar at is smooth so it only exerts a horizontal force on the pipe, determine the minimum distance x so that the bracket can support
8 3. If the coefficient of static friction at is m s = 0.4 and the collar at is smooth so it only exerts a horizontal force on the pipe, determine the minimum distance x so that the bracket can support
Chapter 14: Periodic motion
 Chapter 14: Periodic motion Describing oscillations Simple harmonic motion Energy of simple harmonic motion Applications of simple harmonic motion Simple pendulum & physical pendulum Damped oscillations
Chapter 14: Periodic motion Describing oscillations Simple harmonic motion Energy of simple harmonic motion Applications of simple harmonic motion Simple pendulum & physical pendulum Damped oscillations
Inverted Pendulum System
 Introduction Inverted Pendulum System This lab experiment consists of two experimental procedures, each with sub parts. Experiment 1 is used to determine the system parameters needed to implement a controller.
Introduction Inverted Pendulum System This lab experiment consists of two experimental procedures, each with sub parts. Experiment 1 is used to determine the system parameters needed to implement a controller.
1. Replace the given system of forces acting on a body as shown in figure 1 by a single force and couple acting at the point A.
 Code No: Z0321 / R07 Set No. 1 I B.Tech - Regular Examinations, June 2009 CLASSICAL MECHANICS ( Common to Mechanical Engineering, Chemical Engineering, Mechatronics, Production Engineering and Automobile
Code No: Z0321 / R07 Set No. 1 I B.Tech - Regular Examinations, June 2009 CLASSICAL MECHANICS ( Common to Mechanical Engineering, Chemical Engineering, Mechatronics, Production Engineering and Automobile
Work and kinetic Energy
 Work and kinetic Energy Problem 66. M=4.5kg r = 0.05m I = 0.003kgm 2 Q: What is the velocity of mass m after it dropped a distance h? (No friction) h m=0.6kg mg Work and kinetic Energy Problem 66. M=4.5kg
Work and kinetic Energy Problem 66. M=4.5kg r = 0.05m I = 0.003kgm 2 Q: What is the velocity of mass m after it dropped a distance h? (No friction) h m=0.6kg mg Work and kinetic Energy Problem 66. M=4.5kg
Chapter 15 Oscillations
 Chapter 15 Oscillations Summary Simple harmonic motion Hook s Law Energy F = kx Pendulums: Simple. Physical, Meter stick Simple Picture of an Oscillation x Frictionless surface F = -kx x SHM in vertical
Chapter 15 Oscillations Summary Simple harmonic motion Hook s Law Energy F = kx Pendulums: Simple. Physical, Meter stick Simple Picture of an Oscillation x Frictionless surface F = -kx x SHM in vertical
Friction identification in mechatronic systems
 ISA Transactions 43 2004 205 216 ISA TRANSACTIONS Friction identification in mechatronic systems Bashir M. Y. Nouri* Department of Mechatronics Engineering, Faculty of Engineering, The Hashemite University,
ISA Transactions 43 2004 205 216 ISA TRANSACTIONS Friction identification in mechatronic systems Bashir M. Y. Nouri* Department of Mechatronics Engineering, Faculty of Engineering, The Hashemite University,
The Feedforward Friction Compensation of Linear Motor Using Genetic Learning Algorithm
 Proceedings of the 7th World Congress The International Federation of Automatic Control Seoul, Korea, July 6-, 8 The Feedforward Friction Compensation of Linear Motor Using Genetic Learning Algorithm Chin-Sheng
Proceedings of the 7th World Congress The International Federation of Automatic Control Seoul, Korea, July 6-, 8 The Feedforward Friction Compensation of Linear Motor Using Genetic Learning Algorithm Chin-Sheng
Engineering Mechanics. Friction in Action
 Engineering Mechanics Friction in Action What is friction? Friction is a retarding force that opposes motion. Friction types: Static friction Kinetic friction Fluid friction Sources of dry friction Dry
Engineering Mechanics Friction in Action What is friction? Friction is a retarding force that opposes motion. Friction types: Static friction Kinetic friction Fluid friction Sources of dry friction Dry
UNIVERSITY OF SASKATCHEWAN GE MECHANICS III FINAL EXAM APRIL 18, 2011 Professor A. Dolovich A CLOSED BOOK EXAMINATION TIME: 3 HOURS
 UNIVERSITY OF SASKATCHEWAN GE 226.3 MECHANICS III FINAL EXAM APRIL 18, 2011 Professor A. Dolovich A CLOSED BOOK EXAMINATION TIME: 3 HOURS LAST NAME (printed): FIRST NAME (printed): STUDENT NUMBER: EXAMINATION
UNIVERSITY OF SASKATCHEWAN GE 226.3 MECHANICS III FINAL EXAM APRIL 18, 2011 Professor A. Dolovich A CLOSED BOOK EXAMINATION TIME: 3 HOURS LAST NAME (printed): FIRST NAME (printed): STUDENT NUMBER: EXAMINATION
Kinematics, Dynamics, and Vibrations FE Review Session. Dr. David Herrin March 27, 2012
 Kinematics, Dynamics, and Vibrations FE Review Session Dr. David Herrin March 7, 0 Example A 0 g ball is released vertically from a height of 0 m. The ball strikes a horizontal surface and bounces back.
Kinematics, Dynamics, and Vibrations FE Review Session Dr. David Herrin March 7, 0 Example A 0 g ball is released vertically from a height of 0 m. The ball strikes a horizontal surface and bounces back.
After the spring losses contact with both masses, the speed of m is the speed of 3m.
 Two masses, of size m and 3m, are at rest on a frictionless surface. A compressed, massless spring between the masses is suddenly allowed to uncompress, pushing the masses apart. m 3m After the spring
Two masses, of size m and 3m, are at rest on a frictionless surface. A compressed, massless spring between the masses is suddenly allowed to uncompress, pushing the masses apart. m 3m After the spring
D : SOLID MECHANICS. Q. 1 Q. 9 carry one mark each.
 GTE 2016 Q. 1 Q. 9 carry one mark each. D : SOLID MECHNICS Q.1 single degree of freedom vibrating system has mass of 5 kg, stiffness of 500 N/m and damping coefficient of 100 N-s/m. To make the system
GTE 2016 Q. 1 Q. 9 carry one mark each. D : SOLID MECHNICS Q.1 single degree of freedom vibrating system has mass of 5 kg, stiffness of 500 N/m and damping coefficient of 100 N-s/m. To make the system
Phys101 Second Major-152 Zero Version Coordinator: Dr. W. Basheer Monday, March 07, 2016 Page: 1
 Phys101 Second Major-15 Zero Version Coordinator: Dr. W. Basheer Monday, March 07, 016 Page: 1 Q1. Figure 1 shows two masses; m 1 = 4.0 and m = 6.0 which are connected by a massless rope passing over a
Phys101 Second Major-15 Zero Version Coordinator: Dr. W. Basheer Monday, March 07, 016 Page: 1 Q1. Figure 1 shows two masses; m 1 = 4.0 and m = 6.0 which are connected by a massless rope passing over a
Chapter 8 Rotational Motion and Equilibrium. 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction
 Chapter 8 Rotational Motion and Equilibrium Name 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction 1. The distance between a turning axis and the
Chapter 8 Rotational Motion and Equilibrium Name 1. Give explanation of torque in own words after doing balance-the-torques lab as an inquiry introduction 1. The distance between a turning axis and the
PHY131H1S - Class 20. Pre-class reading quiz on Chapter 12
 PHY131H1S - Class 20 Today: Gravitational Torque Rotational Kinetic Energy Rolling without Slipping Equilibrium with Rotation Rotation Vectors Angular Momentum Pre-class reading quiz on Chapter 12 1 Last
PHY131H1S - Class 20 Today: Gravitational Torque Rotational Kinetic Energy Rolling without Slipping Equilibrium with Rotation Rotation Vectors Angular Momentum Pre-class reading quiz on Chapter 12 1 Last
EE Homework 3 Due Date: 03 / 30 / Spring 2015
 EE 476 - Homework 3 Due Date: 03 / 30 / 2015 Spring 2015 Exercise 1 (10 points). Consider the problem of two pulleys and a mass discussed in class. We solved a version of the problem where the mass was
EE 476 - Homework 3 Due Date: 03 / 30 / 2015 Spring 2015 Exercise 1 (10 points). Consider the problem of two pulleys and a mass discussed in class. We solved a version of the problem where the mass was
CHAPTER 8: ROTATIONAL OF RIGID BODY PHYSICS. 1. Define Torque
 7 1. Define Torque 2. State the conditions for equilibrium of rigid body (Hint: 2 conditions) 3. Define angular displacement 4. Define average angular velocity 5. Define instantaneous angular velocity
7 1. Define Torque 2. State the conditions for equilibrium of rigid body (Hint: 2 conditions) 3. Define angular displacement 4. Define average angular velocity 5. Define instantaneous angular velocity