Systems Engineering/Process Control L1
|
|
|
- Duane Ward
- 6 years ago
- Views:
Transcription
1 Systems Engineering/Process Control L1 What is Systems Engineering/Process Control? Graphical system representations Fundamental control principles Reading: Systems Engineering and Process Control:
2 What is Systems Engineering? Systems Engineering is about dynamical systems How can dynamical systems be modeled? How to understand behavior of complex interconnected systems? How to make a system behave as desired?
3 What is a dynamical system? Dynamical systems have a memory an inertia Outputs does not directly depend on the inputs; there is an inertia Are often modeled abstractly using block diagrams: state inputs outputs System
4 What is control? It is about dynamical systems with feedback Objective: control system (process) to make it behave as desired Schematic figure of a feedback system: Controller Process Feedback
5 What is process control? Control of industrial processes to achieve desired behavior Typical objectives: Safety, predictability, profitability Industrial control system Industrial process Feedback

6 Early control example Watts steam engine (first from 1775) Increased efficiency compared to previous versions Could operate with constant speed despite disturbances
7 Centrifugal governor Measurement of rotation speed Corrects inflow of steam based on machine rotation speed System analyzed in [Maxwell, On Governors, 1868] [

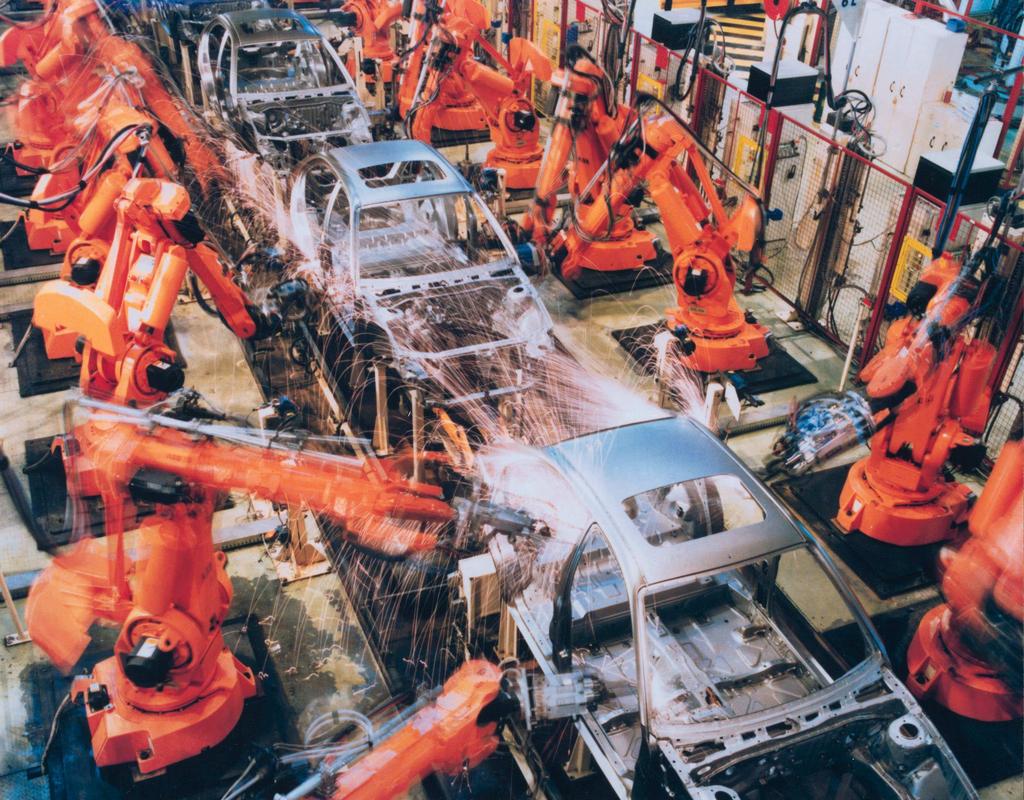
8 Current control example ABB IRB 2000 No. of axes: 6 Max load: 10 kg Range: 1542 mm Repetition accuracy: ±0.1mm Mass: 350 kg Design compromise: Power, speed, stiffness, repeatability vs. cost, weight, power consumption
9

10 Stabilization Many systems need stabilization using control to work as desired Airplanes Bicycles Segways Rockets Exothermic reactions...

11 Inverted pendulum problems Segway/swagway/monowheel Space-X space-craft landing: [ 2009] Fundamental control problem: Balance an inverted pendulum
")

12 Cars Motor control Power transmission (Adaptive) Cruise control Anti-spin systems Lane assistance Parking assistance...


13 Autonomous aerial vehicles Unmanned stealth airplanes Quadrocopters
14 Misc. control applications [ [Raffaello D Andrea, Institute for Dynamic Systems and Control, ETH, Switzerland, 2015]


15 Process industry Perstorp ABs chemical production site in Stenungsund Schematic figure of a process plant

16 Optimal bacteria growth Production of protein from bacteria Cells are fed with glucose Avoid starvation and over-feeding Lack of measurements makes it hard to find optimal feed-rate [Lena de Maré, Automatic Control LTH, 2006]
17 Biology Feedback is a central feature of life. The process of feedback governs how we grow, respond to stress and challenge, and regulate factors such as body temperature, blood pressure, and cholesterol level. The mechanisms operate at every level, from the interaction of proteins in cells to the interaction of organisms in complex ecologies. [Mahlon B. Hoagland and B. Dodson. The Way Life Works, 1995]
18 Graphical process representations General process layouts Process flow sheets Process and instrumentation (P/I) diagrams Block diagrams
19 General process layout Crude sketch of material flow for polymer/polyethylene manufacturing NH 3 Urea Polymers Crude oil Ethylene Polyethylene
20 Process flow sheet A Rest product B C Reactor Heat exchanger Separator product flows important unit operations fundamental sequence of operations
21 Detailed process flow sheet A B Kylvatten TRUMMA Kylvatten KONDENSOR REAKTOR Kylvatten VVX VVX DESTILLATIONSKOLONN Ånga Topprodukt KOKARE Produkt C all important flows all units (e.g., pumps, valves) all steps (including, e.g., reboilers, condensators)
22 Process and instrumentation diagram (P/I-diagram) A FC FT PT PC Cooling water B FC FT LT REACTOR LC Cooling water TT C Cooling water TT TC HEX HEX LT TC LC DISTILLATION COLUMN TT CONDENSOR TT DRUM LT TC LC Top product TC Steam REBOILER Detailed process flow sheet with: instruments (sensors, controllers, actuators) all information flows (e.g., measurement to controller)
23 Instrument symbols TIC First letter: Quantity T = temperature L = level F = flow P = pressure (C/Q = concentration) (X = power) Second (and third) letter: Function T = transmitter (sensor) C = controller I = indicator R = recorder A = alarm Standardized in ISA Standard S5.1
24 Block diagram eplacements Block diagrams reflect information flow between system parts May not coincide with physical flows of system (there may not even be any physical flows in the system) So the arrows transmit information Can draw different block diagrams for same system depending on: desired level of detail purpose of control
25 Control system parts Actuator Process Sensor Controller Sensor/transmitter Measures what happens in the system Controller Decides how the system is controlled Actuator Can influence the system Often sensors and actuators are not drawn, but are included in the process
26 Block diagram for one process PSfrag replacements disturbances control signals Process measurements Control signals: Affect process and can be freely manipulated. (often called inputs or manipulated variables) Disturbances: Affect process but cannot be manipulated. Measurements: Contain information about system quantities (often called outputs or measurement signals)
27 Example: Tank process Reality: q in Block diagram: h q in Tank h q ut = f(h) We control the inflow q in We measure the height h
28 Example: Tank process Reality: q in Block diagram: h q in Tank h q ut q ut We control: the inflow q in the outflow q ut We measure the height h
29 Example: Tank process Reality: q in Block diagram: q in h q ut Tank h q ut We control the outflow q ut We measure the height h The inflow q in is a disturbance (that we cannot manipulate)
30 Fundamental control principles Open-loop control / feedforward Closed-loop control / feedback
31 Open-loop control disturbances setpoint Controller input Process output The controller tries to steer the output to the setpoint (reference) Does not get information from the process (feedback) Only information (feedforward) from the setpoint Open-loop system
32 Pros and cons with open-loop control Pros: Simple Does not require any sensors Cons: Works only for stable processes Good performance requires very accurate model of the system Cannot compensate for unknown disturbances and model errors
33 Open-loop control with feedforward If a disturbance is measurable, we can feedforward from it: measurable disturbance non-measurable disturbances Controller input Process output setpoint Requires sensors (to measure disturbance) Requires model of how the disturbance affects the process Cannot compensate for other disturbances and model errors
34 Closed-loop control disturbances setpoint Controller input Process output Feedback from output Controller steers output towards setpoint Closed-loop system
35 Pros and cons with closed loop control Pros: Can reduce disturbance sensitivity, increase speed, improve accuracy Can stabilize an unstable system It is often enough with a crude model of the system Can make new products and solutions possible! Cons: Requires sensors (for the feedback) Can cause oscillatory behavior and instability Measurement disturbances are fed back to the process
36 Closed-loop control with feedforward measurable disturbance non-measurable disturbances setpoint Controller input Process output Measurable disturbances can be compensated using feedforward Other disturbances and model errors compensated using feedback
37 Example: Cruise control with feedforward Inclination Desired speed Table Throttle Car Measured speed Open-loop control Problems?
38 Example: Cruise control with feedback Inclination Desired speed Error Controller Throttle Car Measured speed 1 Closed-loop control Controller: Error > 0: increase throttle Error < 0: decrease throttle (But how much?)
39 Example: Cruise control with feedback and feedforward Table Inclination Desired speed Σ Controller Σ Car Measured speed 1 Both proactive and reactive Could also feedforward from: inclination (GPS) distance to car in front (radar/camera)
40 Summary [
Systems Engineering/Process Control L1
 Systems Engineering/Process Control L1 What is Systems Engineering/Process Control? Graphical system representations Fundamental control principles Reading: Systems Engineering and Process Control: 1.1
Systems Engineering/Process Control L1 What is Systems Engineering/Process Control? Graphical system representations Fundamental control principles Reading: Systems Engineering and Process Control: 1.1
Fundamental Principles of Process Control
 Fundamental Principles of Process Control Motivation for Process Control Safety First: people, environment, equipment The Profit Motive: meeting final product specs minimizing waste production minimizing
Fundamental Principles of Process Control Motivation for Process Control Safety First: people, environment, equipment The Profit Motive: meeting final product specs minimizing waste production minimizing
Subject: Introduction to Process Control. Week 01, Lectures 01 02, Spring Content
 v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
v CHEG 461 : Process Dynamics and Control Subject: Introduction to Process Control Week 01, Lectures 01 02, Spring 2014 Dr. Costas Kiparissides Content 1. Introduction to Process Dynamics and Control 2.
Enhanced Single-Loop Control Strategies (Advanced Control) Cascade Control Time-Delay Compensation Inferential Control Selective and Override Control
 Cascade Control Time-Delay Compensation Inferential Control Selective and Override Control") Enhanced Single-Loop Control Strategies (Advanced Control) Cascade Control Time-Delay Compensation Inferential Control Selective and Override Control 1 Cascade Control A disadvantage of conventional feedback
Enhanced Single-Loop Control Strategies (Advanced Control) Cascade Control Time-Delay Compensation Inferential Control Selective and Override Control 1 Cascade Control A disadvantage of conventional feedback
EXAMINATION INFORMATION PAGE Written examination
 EXAMINATION INFORMATION PAGE Written examination Course code: Course name: PEF3006 Process Control Examination date: 30 November 2018 Examination time from/to: 09:00-13:00 Total hours: 4 Responsible course
EXAMINATION INFORMATION PAGE Written examination Course code: Course name: PEF3006 Process Control Examination date: 30 November 2018 Examination time from/to: 09:00-13:00 Total hours: 4 Responsible course
Process Unit Control System Design
 Process Unit Control System Design 1. Introduction 2. Influence of process design 3. Control degrees of freedom 4. Selection of control system variables 5. Process safety Introduction Control system requirements»
Process Unit Control System Design 1. Introduction 2. Influence of process design 3. Control degrees of freedom 4. Selection of control system variables 5. Process safety Introduction Control system requirements»
Chapter 1 Basic Characteristics of Control Systems and their Representation Process and Instrument Diagrams
 Chapter 1 Basic Characteristics of Control Systems and their Representation Process and Instrument Diagrams We need ways to describe process control systems. We will learn several ways in this course.
Chapter 1 Basic Characteristics of Control Systems and their Representation Process and Instrument Diagrams We need ways to describe process control systems. We will learn several ways in this course.
Reglerteknik, TNG028. Lecture 1. Anna Lombardi
 Reglerteknik, TNG028 Lecture 1 Anna Lombardi Today lecture We will try to answer the following questions: What is automatic control? Where can we nd automatic control? Why do we need automatic control?
Reglerteknik, TNG028 Lecture 1 Anna Lombardi Today lecture We will try to answer the following questions: What is automatic control? Where can we nd automatic control? Why do we need automatic control?
Control. CSC752: Autonomous Robotic Systems. Ubbo Visser. March 9, Department of Computer Science University of Miami
 Control CSC752: Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami March 9, 2017 Outline 1 Control system 2 Controller Images from http://en.wikipedia.org/wiki/feed-forward
Control CSC752: Autonomous Robotic Systems Ubbo Visser Department of Computer Science University of Miami March 9, 2017 Outline 1 Control system 2 Controller Images from http://en.wikipedia.org/wiki/feed-forward
CM 3310 Process Control, Spring Lecture 21
 CM 331 Process Control, Spring 217 Instructor: Dr. om Co Lecture 21 (Back to Process Control opics ) General Control Configurations and Schemes. a) Basic Single-Input/Single-Output (SISO) Feedback Figure
CM 331 Process Control, Spring 217 Instructor: Dr. om Co Lecture 21 (Back to Process Control opics ) General Control Configurations and Schemes. a) Basic Single-Input/Single-Output (SISO) Feedback Figure
Process Control & Design
 458.308 Process Control & Design Lecture 5: Feedback Control System Jong Min Lee Chemical & Biomolecular Engineering Seoul National University 1 / 29 Feedback Control Scheme: The Continuous Blending Process.1
458.308 Process Control & Design Lecture 5: Feedback Control System Jong Min Lee Chemical & Biomolecular Engineering Seoul National University 1 / 29 Feedback Control Scheme: The Continuous Blending Process.1
Solutions for Tutorial 10 Stability Analysis
 Solutions for Tutorial 1 Stability Analysis 1.1 In this question, you will analyze the series of three isothermal CSTR s show in Figure 1.1. The model for each reactor is the same at presented in Textbook
Solutions for Tutorial 1 Stability Analysis 1.1 In this question, you will analyze the series of three isothermal CSTR s show in Figure 1.1. The model for each reactor is the same at presented in Textbook
CONTROL OF MULTIVARIABLE PROCESSES
 Process plants ( or complex experiments) have many variables that must be controlled. The engineer must. Provide the needed sensors 2. Provide adequate manipulated variables 3. Decide how the CVs and MVs
Process plants ( or complex experiments) have many variables that must be controlled. The engineer must. Provide the needed sensors 2. Provide adequate manipulated variables 3. Decide how the CVs and MVs
Automatic Control (TSRT15): Lecture 1
: Lecture 1") Automatic Control (TSRT15): Lecture 1 Tianshi Chen* Division of Automatic Control Dept. of Electrical Engineering Email: tschen@isy.liu.se Phone: 13-282226 Office: B-house extrance 25-27 * All lecture
Automatic Control (TSRT15): Lecture 1 Tianshi Chen* Division of Automatic Control Dept. of Electrical Engineering Email: tschen@isy.liu.se Phone: 13-282226 Office: B-house extrance 25-27 * All lecture
Process Solutions. Process Dynamics. The Fundamental Principle of Process Control. APC Techniques Dynamics 2-1. Page 2-1
 Process Dynamics The Fundamental Principle of Process Control APC Techniques Dynamics 2-1 Page 2-1 Process Dynamics (1) All Processes are dynamic i.e. they change with time. If a plant were totally static
Process Dynamics The Fundamental Principle of Process Control APC Techniques Dynamics 2-1 Page 2-1 Process Dynamics (1) All Processes are dynamic i.e. they change with time. If a plant were totally static
Feedforward Control Feedforward Compensation
 Feedforward Control Feedforward Compensation Compensation Feedforward Control Feedforward Control of a Heat Exchanger Implementation Issues Comments Nomenclature The inherent limitation of feedback control
Feedforward Control Feedforward Compensation Compensation Feedforward Control Feedforward Control of a Heat Exchanger Implementation Issues Comments Nomenclature The inherent limitation of feedback control
Overview of Control System Design
 Overview of Control System Design Chapter 10 General Requirements 1. Safety. It is imperative that industrial plants operate safely so as to promote the well-being of people and equipment within the plant
Overview of Control System Design Chapter 10 General Requirements 1. Safety. It is imperative that industrial plants operate safely so as to promote the well-being of people and equipment within the plant
ME 132, Dynamic Systems and Feedback. Class Notes. Spring Instructor: Prof. A Packard
 ME 132, Dynamic Systems and Feedback Class Notes by Andrew Packard, Kameshwar Poolla & Roberto Horowitz Spring 2005 Instructor: Prof. A Packard Department of Mechanical Engineering University of California
ME 132, Dynamic Systems and Feedback Class Notes by Andrew Packard, Kameshwar Poolla & Roberto Horowitz Spring 2005 Instructor: Prof. A Packard Department of Mechanical Engineering University of California
Overview of Control System Design
 Overview of Control System Design General Requirements 1. Safety. It is imperative that industrial plants operate safely so as to promote the well-being of people and equipment within the plant and in
Overview of Control System Design General Requirements 1. Safety. It is imperative that industrial plants operate safely so as to promote the well-being of people and equipment within the plant and in
Overview of the Seminar Topic
 Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
Overview of the Seminar Topic Simo Särkkä Laboratory of Computational Engineering Helsinki University of Technology September 17, 2007 Contents 1 What is Control Theory? 2 History
Modeling and Analysis of Dynamic Systems
 Modeling and Analysis of Dynamic Systems by Dr. Guillaume Ducard Fall 2016 Institute for Dynamic Systems and Control ETH Zurich, Switzerland based on script from: Prof. Dr. Lino Guzzella 1/33 Outline 1
Modeling and Analysis of Dynamic Systems by Dr. Guillaume Ducard Fall 2016 Institute for Dynamic Systems and Control ETH Zurich, Switzerland based on script from: Prof. Dr. Lino Guzzella 1/33 Outline 1
Dr Ian R. Manchester Dr Ian R. Manchester AMME 3500 : Review
 Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Week Date Content Notes 1 6 Mar Introduction 2 13 Mar Frequency Domain Modelling 3 20 Mar Transient Performance and the s-plane 4 27 Mar Block Diagrams Assign 1 Due 5 3 Apr Feedback System Characteristics
Plan of the Lecture. Today s topic: what is feedback control? past, present, future
 Plan of the Lecture Today s topic: what is feedback control? past, present, future Plan of the Lecture Today s topic: what is feedback control? past, present, future Goal: get comfortable with the idea
Plan of the Lecture Today s topic: what is feedback control? past, present, future Plan of the Lecture Today s topic: what is feedback control? past, present, future Goal: get comfortable with the idea
B1-1. Closed-loop control. Chapter 1. Fundamentals of closed-loop control technology. Festo Didactic Process Control System
 B1-1 Chapter 1 Fundamentals of closed-loop control technology B1-2 This chapter outlines the differences between closed-loop and openloop control and gives an introduction to closed-loop control technology.
B1-1 Chapter 1 Fundamentals of closed-loop control technology B1-2 This chapter outlines the differences between closed-loop and openloop control and gives an introduction to closed-loop control technology.
Guide to Selected Process Examples :ili3g eil;]iil
![Guide to Selected Process Examples :ili3g eil;]iil](/thumbs/85/91730677.jpg "Guide to Selected Process Examples :ili3g eil;]iil") Guide to Selected Process Examples :ili3g eil;]iil Because of the strong interplay between process dynamics and control perfor mance, examples should begin with process equipment and operating conditions.
Guide to Selected Process Examples :ili3g eil;]iil Because of the strong interplay between process dynamics and control perfor mance, examples should begin with process equipment and operating conditions.
Systems Engineering and Control
 Cork Institute of Technology Bachelor of Engineering (Honours) in Mechanical Engineering - Award (NFQ Level 8) Autumn 2007 Systems Engineering and Control (Time: 3 Hours) Answer any FIVE Questions Examiners:
Cork Institute of Technology Bachelor of Engineering (Honours) in Mechanical Engineering - Award (NFQ Level 8) Autumn 2007 Systems Engineering and Control (Time: 3 Hours) Answer any FIVE Questions Examiners:
Process Control Hardware Fundamentals
 Unit-1: Process Control Process Control Hardware Fundamentals In order to analyse a control system, the individual components that make up the system must be understood. Only with this understanding can
Unit-1: Process Control Process Control Hardware Fundamentals In order to analyse a control system, the individual components that make up the system must be understood. Only with this understanding can
Index. INDEX_p /15/02 3:08 PM Page 765
 INDEX_p.765-770 11/15/02 3:08 PM Page 765 Index N A Adaptive control, 144 Adiabatic reactors, 465 Algorithm, control, 5 All-pass factorization, 257 All-pass, frequency response, 225 Amplitude, 216 Amplitude
INDEX_p.765-770 11/15/02 3:08 PM Page 765 Index N A Adaptive control, 144 Adiabatic reactors, 465 Algorithm, control, 5 All-pass factorization, 257 All-pass, frequency response, 225 Amplitude, 216 Amplitude
Root Locus Design. MEM 355 Performance Enhancement of Dynamical Systems
 Root Locus Design MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline The root locus design method is an iterative,
Root Locus Design MEM 355 Performance Enhancement of Dynamical Systems Harry G. Kwatny Department of Mechanical Engineering & Mechanics Drexel University Outline The root locus design method is an iterative,
Solution to exam in PEF3006 Process Control at Telemark University College
 Solution to exam in PEF3006 Process Control at Telemark University College Exam date: 7. December 2015. Duration: 4 hours. Weight in final grade of the course: 100%. Teacher: Finn Aakre Haugen (finn.haugen@hit.no).
Solution to exam in PEF3006 Process Control at Telemark University College Exam date: 7. December 2015. Duration: 4 hours. Weight in final grade of the course: 100%. Teacher: Finn Aakre Haugen (finn.haugen@hit.no).
Controlled variable- T (house interior temperature) Manipulated variable- Q (heat from the furnace) 1-1
 Manipulated variable- Q (heat from the furnace) 1-1") 1.1 a) True b) True c) True d) False e) True 1.2 Q L Q T TC ON/OFF SWITCH Controlled variable- T (house interior temperature) Manipulated variable- Q (heat from the furnace) Solution Manual for Process
1.1 a) True b) True c) True d) False e) True 1.2 Q L Q T TC ON/OFF SWITCH Controlled variable- T (house interior temperature) Manipulated variable- Q (heat from the furnace) Solution Manual for Process
Laboratory Exercise 1 DC servo
 Laboratory Exercise DC servo Per-Olof Källén ø 0,8 POWER SAT. OVL.RESET POS.RESET Moment Reference ø 0,5 ø 0,5 ø 0,5 ø 0,65 ø 0,65 Int ø 0,8 ø 0,8 Σ k Js + d ø 0,8 s ø 0 8 Off Off ø 0,8 Ext. Int. + x0,
Laboratory Exercise DC servo Per-Olof Källén ø 0,8 POWER SAT. OVL.RESET POS.RESET Moment Reference ø 0,5 ø 0,5 ø 0,5 ø 0,65 ø 0,65 Int ø 0,8 ø 0,8 Σ k Js + d ø 0,8 s ø 0 8 Off Off ø 0,8 Ext. Int. + x0,
Class 27: Block Diagrams
 Class 7: Block Diagrams Dynamic Behavior and Stability of Closed-Loop Control Systems We no ant to consider the dynamic behavior of processes that are operated using feedback control. The combination of
Class 7: Block Diagrams Dynamic Behavior and Stability of Closed-Loop Control Systems We no ant to consider the dynamic behavior of processes that are operated using feedback control. The combination of
Process Control, 3P4 Assignment 6
 Process Control, 3P4 Assignment 6 Kevin Dunn, kevin.dunn@mcmaster.ca Due date: 28 March 204 This assignment gives you practice with cascade control and feedforward control. Question [0 = 6 + 4] The outlet
Process Control, 3P4 Assignment 6 Kevin Dunn, kevin.dunn@mcmaster.ca Due date: 28 March 204 This assignment gives you practice with cascade control and feedforward control. Question [0 = 6 + 4] The outlet
Twin-Screw Food Extruder: A Multivariable Case Study for a Process Control Course
 Twin-Screw Food Extruder: A Multivariable Case Study for a Process Control Course Process Control Course Overview Case Studies Realistic Industrial Problems Motivating to Students Integrate Techniques
Twin-Screw Food Extruder: A Multivariable Case Study for a Process Control Course Process Control Course Overview Case Studies Realistic Industrial Problems Motivating to Students Integrate Techniques
CHEE 319 Process Dynamics and Control
 CHEE 319 Process Dynamics and Control Winter 2012 Instructor: M.Guay TAs: S. Dougherty, D. Park and E. Moshksar 1 Organization Instructor: Dr. Martin Guay Office: Dupuis 406 Phone: 533-2788 Email: guaym@chee.queensu.ca
CHEE 319 Process Dynamics and Control Winter 2012 Instructor: M.Guay TAs: S. Dougherty, D. Park and E. Moshksar 1 Organization Instructor: Dr. Martin Guay Office: Dupuis 406 Phone: 533-2788 Email: guaym@chee.queensu.ca
Enhanced Single-Loop Control Strategies Chapter 16
 Enhanced Single-Loop Control Strategies Chapter 16 1. Cascade control 2. Time-delay compensation 3. Inferential control 4. Selective and override control 5. Nonlinear control 6. Adaptive control 1 Chapter
Enhanced Single-Loop Control Strategies Chapter 16 1. Cascade control 2. Time-delay compensation 3. Inferential control 4. Selective and override control 5. Nonlinear control 6. Adaptive control 1 Chapter
BITS-Pilani Dubai, International Academic City, Dubai Second Semester. Academic Year
 BITS-Pilani Dubai, International Academic City, Dubai Second Semester. Academic Year 2007-2008 Evaluation Com anent: Com rehensive Examination Closed Book CHE UC441/11NSTR UC 45'1 PROCESS CONTROL Date:
BITS-Pilani Dubai, International Academic City, Dubai Second Semester. Academic Year 2007-2008 Evaluation Com anent: Com rehensive Examination Closed Book CHE UC441/11NSTR UC 45'1 PROCESS CONTROL Date:
2002 Prentice Hall, Inc. Gene F. Franklin, J. David Powell, Abbas Emami-Naeini Feedback Control of Dynamic Systems, 4e
 u Figure 2.1 Cruise-control model x Friction force bx m x u Figure 2.2 Free-body diagram for cruise control S P 278 Figure 2.3 Automobile suspension y m 2 k s b v car x m 1 k w Road surface r Inertial
u Figure 2.1 Cruise-control model x Friction force bx m x u Figure 2.2 Free-body diagram for cruise control S P 278 Figure 2.3 Automobile suspension y m 2 k s b v car x m 1 k w Road surface r Inertial
D(s) G(s) A control system design definition
 G(s) A control system design definition") R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
R E Compensation D(s) U Plant G(s) Y Figure 7. A control system design definition x x x 2 x 2 U 2 s s 7 2 Y Figure 7.2 A block diagram representing Eq. (7.) in control form z U 2 s z Y 4 z 2 s z 2 3 Figure
DYNAMIC SIMULATOR-BASED APC DESIGN FOR A NAPHTHA REDISTILLATION COLUMN
 HUNGARIAN JOURNAL OF INDUSTRY AND CHEMISTRY Vol. 45(1) pp. 17 22 (2017) hjic.mk.uni-pannon.hu DOI: 10.1515/hjic-2017-0004 DYNAMIC SIMULATOR-BASED APC DESIGN FOR A NAPHTHA REDISTILLATION COLUMN LÁSZLÓ SZABÓ,
HUNGARIAN JOURNAL OF INDUSTRY AND CHEMISTRY Vol. 45(1) pp. 17 22 (2017) hjic.mk.uni-pannon.hu DOI: 10.1515/hjic-2017-0004 DYNAMIC SIMULATOR-BASED APC DESIGN FOR A NAPHTHA REDISTILLATION COLUMN LÁSZLÓ SZABÓ,
CHAPTER 2 CONTINUOUS STIRRED TANK REACTOR PROCESS DESCRIPTION
 11 CHAPTER 2 CONTINUOUS STIRRED TANK REACTOR PROCESS DESCRIPTION 2.1 INTRODUCTION This chapter deals with the process description and analysis of CSTR. The process inputs, states and outputs are identified
11 CHAPTER 2 CONTINUOUS STIRRED TANK REACTOR PROCESS DESCRIPTION 2.1 INTRODUCTION This chapter deals with the process description and analysis of CSTR. The process inputs, states and outputs are identified
Overview of Control System Design
 Overview of Control System Design Introduction Degrees of Freedom for Process Control Selection of Controlled, Manipulated, and Measured Variables Process Safety and Process Control 1 General Requirements
Overview of Control System Design Introduction Degrees of Freedom for Process Control Selection of Controlled, Manipulated, and Measured Variables Process Safety and Process Control 1 General Requirements
Control Systems Design, SC4026. SC4026 Fall 2009, dr. A. Abate, DCSC, TU Delft
 Control Systems Design, SC4026 SC4026 Fall 2009, dr. A. Abate, DCSC, TU Delft Lecture 1 The concept of feedback The role of a controller What is a state? The concept of model in systems engineering: a
Control Systems Design, SC4026 SC4026 Fall 2009, dr. A. Abate, DCSC, TU Delft Lecture 1 The concept of feedback The role of a controller What is a state? The concept of model in systems engineering: a
Analyzing Control Problems and Improving Control Loop Performance
 OptiControls Inc. Houston, TX Ph: 713-459-6291 www.opticontrols.com info@opticontrols.com Analyzing Control s and Improving Control Loop Performance -by Jacques F. Smuts Page: 1 Presenter Principal Consultant
OptiControls Inc. Houston, TX Ph: 713-459-6291 www.opticontrols.com info@opticontrols.com Analyzing Control s and Improving Control Loop Performance -by Jacques F. Smuts Page: 1 Presenter Principal Consultant
Chapter 7 Control. Part Classical Control. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
Chapter 7 Control 7.1 Classical Control Part 1 1 7.1 Classical Control Outline 7.1.1 Introduction 7.1.2 Virtual Spring Damper 7.1.3 Feedback Control 7.1.4 Model Referenced and Feedforward Control Summary
INTRODUCTION TO ISA SYMBOLOGY
 ERT 213/3 Process instrumentations INTRODUCTION TO ISA SYMBOLOGY DR. RAHIMAH BINTI OTHMAN (Email: rahimah@unimap.edu.my) COURSE OUTCOMES COs 3. Able to design process instruments in bioprocess engineering
ERT 213/3 Process instrumentations INTRODUCTION TO ISA SYMBOLOGY DR. RAHIMAH BINTI OTHMAN (Email: rahimah@unimap.edu.my) COURSE OUTCOMES COs 3. Able to design process instruments in bioprocess engineering
DESIGN OF AN ON-LINE TITRATOR FOR NONLINEAR ph CONTROL
 DESIGN OF AN ON-LINE TITRATOR FOR NONLINEAR CONTROL Alex D. Kalafatis Liuping Wang William R. Cluett AspenTech, Toronto, Canada School of Electrical & Computer Engineering, RMIT University, Melbourne,
DESIGN OF AN ON-LINE TITRATOR FOR NONLINEAR CONTROL Alex D. Kalafatis Liuping Wang William R. Cluett AspenTech, Toronto, Canada School of Electrical & Computer Engineering, RMIT University, Melbourne,
Chapter 8. Feedback Controllers. Figure 8.1 Schematic diagram for a stirred-tank blending system.
 Feedback Controllers Figure 8.1 Schematic diagram for a stirred-tank blending system. 1 Basic Control Modes Next we consider the three basic control modes starting with the simplest mode, proportional
Feedback Controllers Figure 8.1 Schematic diagram for a stirred-tank blending system. 1 Basic Control Modes Next we consider the three basic control modes starting with the simplest mode, proportional
Process Dynamics, Operations, and Control Lecture Notes 2
 Chapter. Dynamic system.45 Process Dynamics, Operations, and Control. Context In this chapter, we define the term 'system' and how it relates to 'process' and 'control'. We will also show how a simple
Chapter. Dynamic system.45 Process Dynamics, Operations, and Control. Context In this chapter, we define the term 'system' and how it relates to 'process' and 'control'. We will also show how a simple
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #1 Monday, January 6, 2003 Instructor: Dr. Ian C. Bruce Room CRL-229, Ext. 26984 ibruce@mail.ece.mcmaster.ca Office Hours: TBA Teaching Assistants:
ELEC ENG 4CL4: Control System Design Notes for Lecture #1 Monday, January 6, 2003 Instructor: Dr. Ian C. Bruce Room CRL-229, Ext. 26984 ibruce@mail.ece.mcmaster.ca Office Hours: TBA Teaching Assistants:
Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2)
") Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2) For all calculations in this book, you can use the MathCad software or any other mathematical software that you are familiar
Appendix A: Exercise Problems on Classical Feedback Control Theory (Chaps. 1 and 2) For all calculations in this book, you can use the MathCad software or any other mathematical software that you are familiar
YTÜ Mechanical Engineering Department
 YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Date: Lab
YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Date: Lab
Introduction to Feedback Control
 Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
YTÜ Mechanical Engineering Department
 YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Report
YTÜ Mechanical Engineering Department Lecture of Special Laboratory of Machine Theory, System Dynamics and Control Division Coupled Tank 1 Level Control with using Feedforward PI Controller Lab Report
Spring 2006 Process Dynamics, Operations, and Control Lesson 5: Operability of Processes
 5.0 context and direction In esson 4, we encountered instability. We think of stability as a mathematical property of our linear system models. Now we will embed this mathematical notion within the practical
5.0 context and direction In esson 4, we encountered instability. We think of stability as a mathematical property of our linear system models. Now we will embed this mathematical notion within the practical
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March Overview of dynamic control systems
 ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
ELEC4631 s Lecture 2: Dynamic Control Systems 7 March 2011 Overview of dynamic control systems Goals of Controller design Autonomous dynamic systems Linear Multi-input multi-output (MIMO) systems Bat flight
MECH 3140 Final Project
 MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
MECH 3140 Final Project Final presentation will be held December 7-8. The presentation will be the only deliverable for the final project and should be approximately 20-25 minutes with an additional 10
Improved Identification and Control of 2-by-2 MIMO System using Relay Feedback
 CEAI, Vol.17, No.4 pp. 23-32, 2015 Printed in Romania Improved Identification and Control of 2-by-2 MIMO System using Relay Feedback D.Kalpana, T.Thyagarajan, R.Thenral Department of Instrumentation Engineering,
CEAI, Vol.17, No.4 pp. 23-32, 2015 Printed in Romania Improved Identification and Control of 2-by-2 MIMO System using Relay Feedback D.Kalpana, T.Thyagarajan, R.Thenral Department of Instrumentation Engineering,
Feedback Control CONTROL THEORY FUNDAMENTALS. Feedback Control: A History. Feedback Control: A History (contd.) Anuradha Annaswamy
 Anuradha Annaswamy") Feedback Control CONTROL THEORY FUNDAMENTALS Actuator Sensor + Anuradha Annaswamy Active adaptive Control Laboratory Massachusetts Institute of Technology must follow with» Speed» Accuracy Feeback: Measure
Feedback Control CONTROL THEORY FUNDAMENTALS Actuator Sensor + Anuradha Annaswamy Active adaptive Control Laboratory Massachusetts Institute of Technology must follow with» Speed» Accuracy Feeback: Measure
Control of Electromechanical Systems
 Control of Electromechanical Systems November 3, 27 Exercise Consider the feedback control scheme of the motor speed ω in Fig., where the torque actuation includes a time constant τ A =. s and a disturbance
Control of Electromechanical Systems November 3, 27 Exercise Consider the feedback control scheme of the motor speed ω in Fig., where the torque actuation includes a time constant τ A =. s and a disturbance
NATIONAL CERTIFICATE (VOCATIONAL) APPLIED ENGINEERING TECHNOLOGY NQF LEVEL 4 NOVEMBER 2009
 APPLIED ENGINEERING TECHNOLOGY NQF LEVEL 4 NOVEMBER 2009") NATIONAL CERTIFICATE (VOCATIONAL) APPLIED ENGINEERING TECHNOLOGY NQF LEVEL 4 NOVEMBER 2009 (6021024) 30 October (Y-Paper) 13:00 16:00 A non-programmable scientific calculator may be used. This question
NATIONAL CERTIFICATE (VOCATIONAL) APPLIED ENGINEERING TECHNOLOGY NQF LEVEL 4 NOVEMBER 2009 (6021024) 30 October (Y-Paper) 13:00 16:00 A non-programmable scientific calculator may be used. This question
Chapter 8. Design of Pressurizer and Plant Control
 Nuclear Systems Design Chapter 8. Design of Pressurizer and Plant Control Prof. Hee Cheon NO 8.1 Sizing Problem of Pressurizer and Plant Control 8.1.1 Basic Plant Control Basic Control Scheme I : to maintain
Nuclear Systems Design Chapter 8. Design of Pressurizer and Plant Control Prof. Hee Cheon NO 8.1 Sizing Problem of Pressurizer and Plant Control 8.1.1 Basic Plant Control Basic Control Scheme I : to maintain
Process Control Exercise 2
 Process Control Exercise 2 1 Distillation Case Study Distillation is a method of separating liquid mixtures by means of partial evaporation. The volatility α of a compound determines how enriched the liquid
Process Control Exercise 2 1 Distillation Case Study Distillation is a method of separating liquid mixtures by means of partial evaporation. The volatility α of a compound determines how enriched the liquid
What is flight dynamics? AE540: Flight Dynamics and Control I. What is flight control? Is the study of aircraft motion and its characteristics.
 KING FAHD UNIVERSITY Department of Aerospace Engineering AE540: Flight Dynamics and Control I Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics.
KING FAHD UNIVERSITY Department of Aerospace Engineering AE540: Flight Dynamics and Control I Instructor Dr. Ayman Hamdy Kassem What is flight dynamics? Is the study of aircraft motion and its characteristics.
PROCESS CONTROL (IT62) SEMESTER: VI BRANCH: INSTRUMENTATION TECHNOLOGY
 SEMESTER: VI BRANCH: INSTRUMENTATION TECHNOLOGY") PROCESS CONTROL (IT62) SEMESTER: VI BRANCH: INSTRUMENTATION TECHNOLOGY by, Dr. Mallikarjun S. Holi Professor & Head Department of Biomedical Engineering Bapuji Institute of Engineering & Technology Davangere-577004
PROCESS CONTROL (IT62) SEMESTER: VI BRANCH: INSTRUMENTATION TECHNOLOGY by, Dr. Mallikarjun S. Holi Professor & Head Department of Biomedical Engineering Bapuji Institute of Engineering & Technology Davangere-577004
Design and Comparative Analysis of Controller for Non Linear Tank System
 Design and Comparative Analysis of for Non Linear Tank System Janaki.M 1, Soniya.V 2, Arunkumar.E 3 12 Assistant professor, Department of EIE, Karpagam College of Engineering, Coimbatore, India 3 Associate
Design and Comparative Analysis of for Non Linear Tank System Janaki.M 1, Soniya.V 2, Arunkumar.E 3 12 Assistant professor, Department of EIE, Karpagam College of Engineering, Coimbatore, India 3 Associate
Dynamics of Machines. Prof. Amitabha Ghosh. Department of Mechanical Engineering. Indian Institute of Technology, Kanpur. Module No.
 Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 07 Lecture No. # 01 In our previous lectures, you have noticed that we
Dynamics of Machines Prof. Amitabha Ghosh Department of Mechanical Engineering Indian Institute of Technology, Kanpur Module No. # 07 Lecture No. # 01 In our previous lectures, you have noticed that we
Chapter 3: Block Diagrams and Signal Flow Graphs
 Chapter 3: Block Diagrams and Signal Flow Graphs Farid Golnaraghi, Simon Fraser University Benjamin C. Kuo, University of Illinois ISBN: 978 0 470 04896 2 Introduction In this chapter, we discuss graphical
Chapter 3: Block Diagrams and Signal Flow Graphs Farid Golnaraghi, Simon Fraser University Benjamin C. Kuo, University of Illinois ISBN: 978 0 470 04896 2 Introduction In this chapter, we discuss graphical
School of Mechanical Engineering Purdue University. ME375 Feedback Control - 1
 Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Introduction to Feedback Control Control System Design Why Control? Open-Loop vs Closed-Loop (Feedback) Why Use Feedback Control? Closed-Loop Control System Structure Elements of a Feedback Control System
Introduction to Control (034040) lecture no. 2
 lecture no. 2") Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
Introduction to Control (034040) lecture no. 2 Leonid Mirkin Faculty of Mechanical Engineering Technion IIT Setup: Abstract control problem to begin with y P(s) u where P is a plant u is a control signal
ECEN 420 LINEAR CONTROL SYSTEMS. Instructor: S. P. Bhattacharyya* (Dr. B.) 1/18
 1/18") ECEN 420 LINEAR CONTROL SYSTEMS Instructor: S. P. Bhattacharyya* (Dr. B.) 1/18 Course information Course Duration: 14 weeks Divided into 7 units, each of two weeks duration, 5 lectures, 1 test Each unit
ECEN 420 LINEAR CONTROL SYSTEMS Instructor: S. P. Bhattacharyya* (Dr. B.) 1/18 Course information Course Duration: 14 weeks Divided into 7 units, each of two weeks duration, 5 lectures, 1 test Each unit
Index Accumulation, 53 Accuracy: numerical integration, sensor, 383, Adaptive tuning: expert system, 528 gain scheduling, 518, 529, 709,
 Accumulation, 53 Accuracy: numerical integration, 83-84 sensor, 383, 772-773 Adaptive tuning: expert system, 528 gain scheduling, 518, 529, 709, 715 input conversion, 519 reasons for, 512-517 relay auto-tuning,
Accumulation, 53 Accuracy: numerical integration, 83-84 sensor, 383, 772-773 Adaptive tuning: expert system, 528 gain scheduling, 518, 529, 709, 715 input conversion, 519 reasons for, 512-517 relay auto-tuning,
Alireza Mousavi Brunel University
 Alireza Mousavi Brunel University 1 » Online Lecture Material at (www.brunel.ac.uk/~emstaam)» C. W. De Silva, Modelling and Control of Engineering Systems, CRC Press, Francis & Taylor, 2009.» M. P. Groover,
Alireza Mousavi Brunel University 1 » Online Lecture Material at (www.brunel.ac.uk/~emstaam)» C. W. De Silva, Modelling and Control of Engineering Systems, CRC Press, Francis & Taylor, 2009.» M. P. Groover,
Solutions for Tutorial 3 Modelling of Dynamic Systems
 Solutions for Tutorial 3 Modelling of Dynamic Systems 3.1 Mixer: Dynamic model of a CSTR is derived in textbook Example 3.1. From the model, we know that the outlet concentration of, C, can be affected
Solutions for Tutorial 3 Modelling of Dynamic Systems 3.1 Mixer: Dynamic model of a CSTR is derived in textbook Example 3.1. From the model, we know that the outlet concentration of, C, can be affected
Flywheels-Function need and Operation
 STUDY OF FLYWHEEL Flywheel definition A flywheel is an inertial energy-storage device. It absorbs mechanical energy and serves as a reservoir, storing energy during the period when the supply of energy
STUDY OF FLYWHEEL Flywheel definition A flywheel is an inertial energy-storage device. It absorbs mechanical energy and serves as a reservoir, storing energy during the period when the supply of energy
Principles and Practice of Automatic Process Control
 Principles and Practice of Automatic Process Control Third Edition Carlos A. Smith, Ph.D., P.E. Department of Chemical Engineering University of South Florida Armando B. Corripio, Ph.D., P.E. Gordon A.
Principles and Practice of Automatic Process Control Third Edition Carlos A. Smith, Ph.D., P.E. Department of Chemical Engineering University of South Florida Armando B. Corripio, Ph.D., P.E. Gordon A.
Final Examination Thursday May Please initial the statement below to show that you have read it
 EN40: Dynamics and Vibrations Final Examination Thursday May 0 010 Division of Engineering rown University NME: General Instructions No collaboration of any kind is permitted on this examination. You may
EN40: Dynamics and Vibrations Final Examination Thursday May 0 010 Division of Engineering rown University NME: General Instructions No collaboration of any kind is permitted on this examination. You may
Lynkurs Prosessregulering (Crash course process control) Sigurd Skogestad Institutt for kjemisk prosessteknologi Rom K4-211
 Sigurd Skogestad Institutt for kjemisk prosessteknologi Rom K4-211") Lynkurs Prosessregulering (Crash course process control) Sigurd Skogestad Institutt for kjemisk prosessteknologi Rom K4-211 skoge@ntnu.no 1 Course for 3rd year students: Pensum (syllabus): Lectures/exercises
Lynkurs Prosessregulering (Crash course process control) Sigurd Skogestad Institutt for kjemisk prosessteknologi Rom K4-211 skoge@ntnu.no 1 Course for 3rd year students: Pensum (syllabus): Lectures/exercises
Control System Design - A Perspective
 Department of Automatic Control LTH, Lund University 1 Introduction 2 Integrated System and Control Design 3 Control Principles 4 Requirements and Methods 5 Summary Theme: Many things to think about. Introduction
Department of Automatic Control LTH, Lund University 1 Introduction 2 Integrated System and Control Design 3 Control Principles 4 Requirements and Methods 5 Summary Theme: Many things to think about. Introduction
Performance Characteristics of Deterministic Leak Detection Systems
 Performance Characteristics of Deterministic Leak Detection Systems Michael Kasch 3S Consult München GmbH Germany Abstract The aim of leak detection and leak location is the limitation of losses and possible
Performance Characteristics of Deterministic Leak Detection Systems Michael Kasch 3S Consult München GmbH Germany Abstract The aim of leak detection and leak location is the limitation of losses and possible
Feedback Basics. David M. Auslander Mechanical Engineering University of California at Berkeley. copyright 1998, D.M. Auslander
 Feedback Basics David M. Auslander Mechanical Engineering University of California at Berkeley copyright 1998, D.M. Auslander 1 I. Feedback Control Context 2 What is Feedback Control? Measure desired behavior
Feedback Basics David M. Auslander Mechanical Engineering University of California at Berkeley copyright 1998, D.M. Auslander 1 I. Feedback Control Context 2 What is Feedback Control? Measure desired behavior
Lecture 12. Upcoming labs: Final Exam on 12/21/2015 (Monday)10:30-12:30
10:30-12:30") 289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
289 Upcoming labs: Lecture 12 Lab 20: Internal model control (finish up) Lab 22: Force or Torque control experiments [Integrative] (2-3 sessions) Final Exam on 12/21/2015 (Monday)10:30-12:30 Today: Recap
CONTROL MODE SETTINGS. The quality of control obtained from a particular system depends largely on the adj ustments made to the various mode
 Instrumentation & Control - Course 136 CONTROL MODE SETTINGS The quality of control obtained from a particular system depends largely on the adj ustments made to the various mode settings. Many control
Instrumentation & Control - Course 136 CONTROL MODE SETTINGS The quality of control obtained from a particular system depends largely on the adj ustments made to the various mode settings. Many control
CHAPTER 15: FEEDFORWARD CONTROL
 CHAPER 5: EEDORWARD CONROL When I complete this chapter, I want to be able to do the following. Identify situations for which feedforward is a good control enhancement Design feedforward control using
CHAPER 5: EEDORWARD CONROL When I complete this chapter, I want to be able to do the following. Identify situations for which feedforward is a good control enhancement Design feedforward control using
Control System Design
 ELEC ENG 4CL4: Control System Design Notes for Lecture #36 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Friday, April 4, 2003 3. Cascade Control Next we turn to an
ELEC ENG 4CL4: Control System Design Notes for Lecture #36 Dr. Ian C. Bruce Room: CRL-229 Phone ext.: 26984 Email: ibruce@mail.ece.mcmaster.ca Friday, April 4, 2003 3. Cascade Control Next we turn to an
Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process
 Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process D.Angeline Vijula #, Dr.N.Devarajan * # Electronics and Instrumentation Engineering Sri Ramakrishna
Design of Decentralised PI Controller using Model Reference Adaptive Control for Quadruple Tank Process D.Angeline Vijula #, Dr.N.Devarajan * # Electronics and Instrumentation Engineering Sri Ramakrishna
Tradeoffs and Limits of Performance
 Chapter 9 Tradeoffs and Limits of Performance 9. Introduction Fundamental limits of feedback systems will be investigated in this chapter. We begin in Section 9.2 by discussing the basic feedback loop
Chapter 9 Tradeoffs and Limits of Performance 9. Introduction Fundamental limits of feedback systems will be investigated in this chapter. We begin in Section 9.2 by discussing the basic feedback loop
Feedback Control of Linear SISO systems. Process Dynamics and Control
 Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Feedback Control of Linear SISO systems Process Dynamics and Control 1 Open-Loop Process The study of dynamics was limited to open-loop systems Observe process behavior as a result of specific input signals
Solutions for Tutorial 4 Modelling of Non-Linear Systems
 Solutions for Tutorial 4 Modelling of Non-Linear Systems 4.1 Isothermal CSTR: The chemical reactor shown in textbook igure 3.1 and repeated in the following is considered in this question. The reaction
Solutions for Tutorial 4 Modelling of Non-Linear Systems 4.1 Isothermal CSTR: The chemical reactor shown in textbook igure 3.1 and repeated in the following is considered in this question. The reaction
UNIT 5 GOVERNORS 5.1 INTRODUCTION. Structure. 5.1 Introduction. 5.2 Classification of Governors 5.3 Gravity Controlled Centrifugal Governors
 UNIT 5 GVERNRS Governors Structure 5. Introduction bjectives 5. lassification of Governors 5.3 Gravity ontrolled entrifugal Governors 5.3. Watt Governor 5.3. Porter Governor 5.4 Spring ontrolled entrifugal
UNIT 5 GVERNRS Governors Structure 5. Introduction bjectives 5. lassification of Governors 5.3 Gravity ontrolled entrifugal Governors 5.3. Watt Governor 5.3. Porter Governor 5.4 Spring ontrolled entrifugal
Lecture 5 Classical Control Overview III. Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore
 Lecture 5 Classical Control Overview III Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore A Fundamental Problem in Control Systems Poles of open
Lecture 5 Classical Control Overview III Dr. Radhakant Padhi Asst. Professor Dept. of Aerospace Engineering Indian Institute of Science - Bangalore A Fundamental Problem in Control Systems Poles of open
AN INTRODUCTION CONTROL +
 AN INTRODUCTION CONTROL + QUANTUM CIRCUITS AND COHERENT QUANTUM FEEDBACK CONTROL Josh Combes The Center for Quantum Information and Control, University of New Mexico Quantum feedback control Parameter
AN INTRODUCTION CONTROL + QUANTUM CIRCUITS AND COHERENT QUANTUM FEEDBACK CONTROL Josh Combes The Center for Quantum Information and Control, University of New Mexico Quantum feedback control Parameter
Control Of Heat Exchanger Using Internal Model Controller
 IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719 Vol. 3, Issue 7 (July. 2013), V1 PP 09-15 Control Of Heat Exchanger Using Internal Model Controller K.Rajalakshmi $1, Ms.V.Mangaiyarkarasi
IOSR Journal of Engineering (IOSRJEN) e-issn: 2250-3021, p-issn: 2278-8719 Vol. 3, Issue 7 (July. 2013), V1 PP 09-15 Control Of Heat Exchanger Using Internal Model Controller K.Rajalakshmi $1, Ms.V.Mangaiyarkarasi
ChE 6303 Advanced Process Control
 ChE 6303 Advanced Process Control Teacher: Dr. M. A. A. Shoukat Choudhury, Email: shoukat@buet.ac.bd Syllabus: 1. SISO control systems: Review of the concepts of process dynamics and control, process models,
ChE 6303 Advanced Process Control Teacher: Dr. M. A. A. Shoukat Choudhury, Email: shoukat@buet.ac.bd Syllabus: 1. SISO control systems: Review of the concepts of process dynamics and control, process models,
Cascade Control of a Continuous Stirred Tank Reactor (CSTR)
") Journal of Applied and Industrial Sciences, 213, 1 (4): 16-23, ISSN: 2328-4595 (PRINT), ISSN: 2328-469 (ONLINE) Research Article Cascade Control of a Continuous Stirred Tank Reactor (CSTR) 16 A. O. Ahmed
Journal of Applied and Industrial Sciences, 213, 1 (4): 16-23, ISSN: 2328-4595 (PRINT), ISSN: 2328-469 (ONLINE) Research Article Cascade Control of a Continuous Stirred Tank Reactor (CSTR) 16 A. O. Ahmed
AUTOMATIC CONTROL. Exercises
 AUTOMATIC CONTROL Exercises Department of Automatic Control Lund University, Faculty of Engineering June 27 . Model Building and Linearization. Many everyday situations may be described and analyzed using
AUTOMATIC CONTROL Exercises Department of Automatic Control Lund University, Faculty of Engineering June 27 . Model Building and Linearization. Many everyday situations may be described and analyzed using
Introduction to Process Control
 Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
Introduction to Process Control For more visit :- www.mpgirnari.in By: M. P. Girnari (SSEC, Bhavnagar) For more visit:- www.mpgirnari.in 1 Contents: Introduction Process control Dynamics Stability The
16.400/453J Human Factors Engineering. Manual Control I
 J Human Factors Engineering Manual Control I 1 Levels of Control Human Operator Human Operator Human Operator Human Operator Human Operator Display Controller Display Controller Display Controller Display
J Human Factors Engineering Manual Control I 1 Levels of Control Human Operator Human Operator Human Operator Human Operator Human Operator Display Controller Display Controller Display Controller Display
CHAPTER 5 CONVECTIVE HEAT TRANSFER COEFFICIENT
 62 CHAPTER 5 CONVECTIVE HEAT TRANSFER COEFFICIENT 5.1 INTRODUCTION The primary objective of this work is to investigate the convective heat transfer characteristics of silver/water nanofluid. In order
62 CHAPTER 5 CONVECTIVE HEAT TRANSFER COEFFICIENT 5.1 INTRODUCTION The primary objective of this work is to investigate the convective heat transfer characteristics of silver/water nanofluid. In order