Divide-and-Conquer Sequential Monte Carlo
|
|
|
- Jerome Berry
- 6 years ago
- Views:
Transcription
1 Divide-and-Conquer Joint work with: John Aston, Alexandre Bouchard-Côté, Brent Kirkpatrick, Fredrik Lindsten, Christian Næsseth, Thomas Schön University of Warwick Algorithms and Computationally Intensive Statistics November 25th, 2016
2 Outline Importance Sampling to (SMC) SMC to Divide and Conquer SMC (DC-SMC) Some Theoretical Properties of DC-SMC Illustrative Applications Conclusions and Some (Open) Questions
3 Essential Problem The Abstract Problem Given a density, π(x) = γ(x) Z, such that γ(x) can be evaluated pointwise, how can we approximate π and how about Z? Can we do so robustly? In a distributed setting?
4 Importance Sampling Simple identity: provided γ µ: γ(x) Z = γ(x)dx = µ(x) µ(x)dx So, if X 1, X 2,... iid µ, then: unbiasedness slln clt [ 1 lim N N N [ ] 1 N γ(x i ) N : E =Z N µ(x i ) 1 lim N N N i=1 ( [ ]) γ(xi ) where W N 0, Var µ(x 1 ) ϕ(x 1). N i=1 i=1 γ(x i ) µ(x i ) ϕ(x i) a.s. γ(ϕ) γ(x i ) µ(x i ) ϕ(x i) γ(ϕ) ] d W
5 Sequential Importance Sampling Write γ(x 1:n ) = γ(x 1 ) define, for p = 1,..., n then γ(x 1:n ) µ(x 1:n ) }{{} W n(x 1:n ) γ p (x 1:p ) = γ 1 (x 1 ) = γ 1(x 1 ) µ 1 (x 1 ) }{{} w 1 (x 1 ) p=2 n γ(x p x 1:p 1 ), p=2 p γ(x q x 1:q 1 ), q=2 n γ p (x 1:p ), γ p 1 (x 1:p 1 )µ p (x p x 1:p 1 ) }{{} w p(x 1:p ) and we can sequentially approximate Z p = γ p (x 1:p )dx 1:p.
6 Sequential Importance Resampling (SIR) Given a sequence γ 1 (x 1 ), γ 2 (x 1:2 ),...: Initialisation, n = 1: Sample X 1 1,..., X N 1 Compute iid µ 1 W i 1 = γ 1(X i 1 ) µ i 1 (X i 1 ) Obtain Ẑ N 1 = 1 N N i=1 W i 1 π N 1 = Ni=1 W i 1 δ X i 1 N j=1 W j 1 [This is just (self-normalized) importance sampling.]
7 Iteration, n n + 1: Resample: sample (X 1 n,1:n 1,..., X N n,1:n 1 ) iid N i=1 δ X i n 1 Sample X i n,n q n ( X i n,1:n 1 ) Compute W i n = γ n (X i n,1:n ) γ n 1 (X i n,1:n 1 ) q n(x i n,n X i n,1:n 1 ). Obtain Ẑ N n = Ẑ N n 1 1 N N Wn i π n N = i=1 N i=1 W nδ i X i n N j=1 W n j.
8 SIR: Theoretical Justification Under regularity conditions we still have: unbiasedness slln E[Ẑ N n ] = Z n lim N πn n (ϕ) a.s. = π n (ϕ) clt For a normal random variable W n of appropriate variance: lim N[ π N n (ϕ) π n (ϕ)] = d W n N although establishing this becomes a little harder (cf., e.g. Del Moral (2004), Andrieu et al. 2010).
9 Simple Particle Filters: One Family of SIR Algorithms x 1 x 2 x 3 x 4 x 5 x 6 y 1 y 2 y 3 y 4 y 5 y 6 Unobserved Markov chain {X n } transition f. Observed process {Y n } conditional density g. The joint density is available: p(x 1:n, y 1:n θ) = f θ 1 (x 1 )g θ (y 1 x 1 ) Natural SIR target distributions: n f θ (x i x i 1 )g θ (y i x i ). i=2 πn(x θ 1:n ) :=p(x 1:n y 1:n, θ) p(x 1:n, y 1:n θ) =: γn(x θ 1:n ) Zn θ = p(x 1:n, y 1:n θ)dx 1:n = p(y 1:n θ)
10 Bootstrap PFs and Similar Choosing πn(x θ 1:n ) :=p(x 1:n y 1:n, θ) p(x 1:n, y 1:n θ) =: γn(x θ 1:n ) Zn θ = p(x 1:n, y 1:n θ)dx 1:n = p(y 1:n θ) and q p (x p x 1:p 1 ) = f θ (x p x p 1 ) yields the bootstrap particle filter of Gordon et al. (1993), whereas q p (x p x 1:p 1 ) = p(x p x p 1, y p, θ) yields the locally optimal particle filter. Note: Many alternative particle filters are SIR algorithms with other targets. Cf. J. and Doucet (2008); Doucet and J. (2011).
11 Samplers: Another SIR Class Given a sequence of targets π 1,..., π n on arbitrary spaces, Del Moral et al. (2006) extend the space: π n (x 1:n ) =π n (x n ) γ n (x 1:n ) =γ n (x n ) Z n = = 1 p=n 1 1 p=n 1 γ n (x 1:n )dx 1:n γ n (x n ) L p (x p+1, x p ) L p (x p+1, x p ) 1 p=n 1 L p (x p+1, x p )dx 1:n = γ n (x n )dx n = Z n
12 A Simple SMC Sampler Given γ 1,..., γ n, on (E, E), for i = 1,..., N Sample X i 1 iid µ 1 compute W i 1 = γ 1(X i 1 ) µ 1 (X i 1 ) and Ẑ1 N = 1 N N i=1 W 1 i For p = 2,..., n Resample: X 1:N iid n,n 1 N i=1 W n 1 i δ X n 1. Sample: X i n K n (X i n,1:n 1, ), where π nk n = π n. Compute: W i n = γn(x i n,n 1 ) γ n 1(X i n,n 1 ). Then Ẑ N n = Ẑ N n 1 1 N N i=1 W i n, n and πn N i=1 = W nδ i X i n n. j=1 W n j
13 Bayesian Inference (Chopin, 2001;Del Moral et al., 2006) In a Bayesian context: Given a prior p(θ) and likelihood l(θ; y 1:m ) One could specify: Data Tempering γ p (θ) = p(θ)l(θ; y 1:mp ) for m 1 = 0 < m 2 < < m T = m Likelihood Tempering γ p (θ) = p(θ)l(θ; y 1:m ) βp β 1 = 0 < β 2 < < β T = 1 Something else? Here Z T = p(θ)l(θ; y 1:n )dθ and γ T (θ) p(θ y 1:n ). Specifying (m 1,..., m T ), (β 1,..., β T ) or (γ 1,..., γ T ) is hard 1. for 1 Just ask Lewis...
14 Illustrative Sequences of Targets dnorm(x, mu0, var0) dnorm(x, mu0, var0) x x
15 One Adaptive Scheme (Zhou, J. & Aston, 2016)+Refs Resample When ESS(W 1:N n ) = ( N i=1 (W i n) 2 ) 1 is below a threshold. Likelihood Tempering At iteration n: Set β n such that: N( N n ) 2 N k=1 W (k) (k) n 1 (w n ) = CESS 2 j=1 W (j) n 1 w (j) which controls χ 2 -discrepancy between successive distributions. Proposals Follow (Jasra et al., 2010): adapt to keep acceptance rate about right. Question Are there better, practical approaches to specifying a sequence of distributions?
16 Divide-and-Conquer (Lindsten, J. et al., 2016) Many models admit natural decompositions: Level 0: x 5 Level 1: x 4 x 4 Level 2: x 1 x 2 x 3 x 1 x 2 x 3 x 1 x 2 x 3 y 1 y 2 y 3 y 1 y 2 y 3 y 1 y 2 y 3 To which we can apply a divide-and-conquer strategy: π r π t π c1 π cc
17 A few formalities... Use a tree, T of models (with rootward variable inclusion): π r π t π c1 π cc Let t T denote a node; r T is the root. Let C(t) = {c 1,..., c C } denote the children of t. Let X t denote the space of variables included in t but not its children. dc-smc can be viewed as a recursion over this tree.
18 dc-smc(t) an extension of SIR 1. For c C(t) : 1.1 ({x i c, w i c} N i=1, Ẑ N c ) dc-smc(c). 1.2 Resample {x i c, wc} i N i=1 to obtain the equally weighted particle system {ˆx i c, 1} N i=1. 2. For particle i = 1 : N: 2.1 If X t, simulate x i t q t ( ˆx i c 1,..., ˆx i c C ), where (c 1, c 2,..., c C ) = C(t); else x i t. 2.2 Set x i t = (ˆx i c 1,..., ˆx i c C, x i t). 2.3 Compute w i t = γ t (x i t ) 1 c C(t) γc (ˆxi c ) q t ( x i t ˆxi c 1,...,ˆx i c ). C 3. Compute Ẑ N t = { 1 N N i=1 wi t} c C(t) Ẑ N c. 4. Return ({x i t, w i t} N i=1, Ẑ N t ).
19 Theoretical Properties I Unbiasedness of Normalising Constant Estimates Provided that γ t c C(t) γ c q t for every t T and an unbiased, exchangeable resampling scheme is applied to every population at every iteration, we have for any N 1: E[Ẑ r N ] = Z r = γ r (x r )dx r.
20 Strong Law of Large Numbers Under regularity conditions the weighted particle system (x N,i r, wr N,i ) N i=1 generated by dc-smc(r) is consistent in that for all functions f : Z R satisfying certain assumptions: N i=1 w N,i r N j=1 wn,j r ϕ(x N,i r ) a.s. π(ϕ(x)) as N.
21 Some (Importance) Extensions 1. Mixture Resampling: we could make use of N i=1 j=1 N wc i 1 wc j dγ t 2 (x i c dγ c1 γ 1, x j c 2 )δ (x i c2 c1,x j c 2 ) 2. Tempering (Del Moral et al, 2006): between γ c1 γ c2 and γ t 3. Adaptation (Zhou, J. and Aston, 2016): tempering sequence MCMC kernel parameters
22 An Ising Model k indexes v k V Z 2 x k { 1, +1} p(z) e βe(z), β 0 E(z) = (k,l) E x kx l We consider a grid of size with β = (the critical temperature).
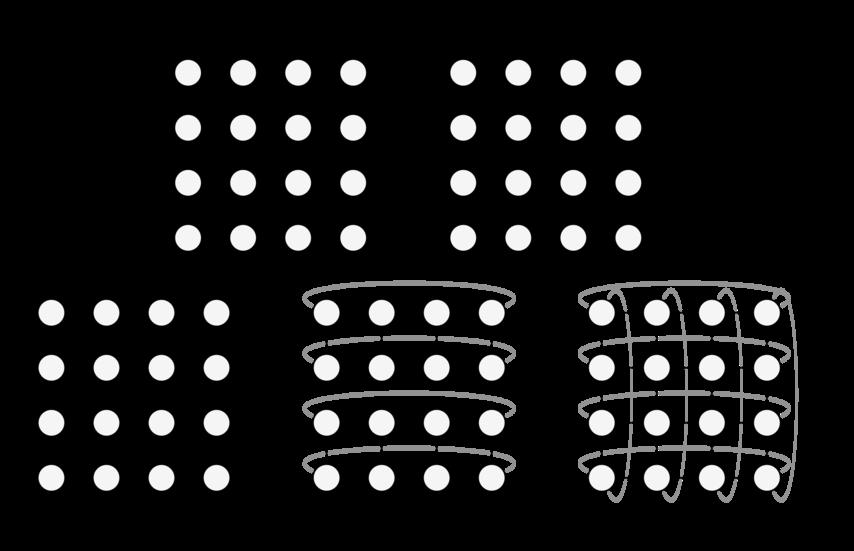
23 A sequence of decompositions
24 log Z SMC D&C SMC (ann) D&C SMC (ann+mix) E[E(x)] Wall clock time (s) 2650 SMC D&C SMC (ann) D&C SMC (ann+mix) Single flip MH Wall clock time (s) Summaries over 50 independent runs of each algorithm.
25 New York Schools Maths Test: data Data organised into a tree T. A root-to-leaf path is: NYC (the root, denoted by r T ), borough, school district, school, year. Each leaf t T comes with an observation of m t exam successes out of M t trials. Total of test instances five borough (Manhattan, The Bronx, Brooklyn, Queens, Staten Island), 32 distinct districts, 710 distinct schools.
26 New York Schools Maths Test: Bayesian Model Number of successes m t at a leaf t is Bin(M t, p t ). where p t = logistic(θ t ), where θ t is a latent parameter. internal nodes of the tree also have a latent θ t model the difference in θ t along e = (t t ) as θ t = θ t + e, where, e N(0, σ 2 e). We put an improper prior (uniform on (, )) on θ r. We also make the variance random, but shared across siblings, σ 2 t Exp(1).
27 New York Schools Maths Test: Implementation The basic SIR-implementation of dc-smc. Using the natural hierarchical structure provided by the model. Given σ 2 t and the θ t at the leaves, the other random variables are multivariate normal. We instantiate values for θ t only at the leaves. At internal node t, sample only σt 2 and marginalize out θ t. Each step of dc-smc therefore is either: i. At leaves sample p t Beta(1 + m t, 1 + M t m t ) and set θ t = logit(p t ). ii. At internal nodes sample σt 2 Exp(1). Java implementation:
28 New York Schools Maths Test: Results Mean parameter NY NY Bronx NY Kings NY Manhattan NY Queens NY Richmond Posterior density approximation DC with particles. Bronx County has the highest fraction (41%) of children (under 18) living below poverty level. 2 Queens has the second lowest (19.7%), after Richmond (Staten Island, 16.7%). Staten Island contains a single school district so the posterior distribution is much flatter for this borough. 2 Statistics from the New York State Poverty Report 2013, Poverty Report.pdf
29 Normalising Constant Estimates 3825 Estimate of log(z) sampling_method Number of particles (log scale) DC STD
30 Distributed Implementation Time (s) Speedup Number of nodes 1 10 Number of nodes Xeon X GHz processors connected by a non-blocking Infiniband 4X QDR network
31 Conclusions SMC SIR D&C-SMC SIR + Coalescence Distributed implementation is straightforward D&C strategy can improve even serial performance Some questions remain unanswered: How can we construct (near) optimal tree-decompositions? How much standard SMC theory can be extended to this setting? Some application areas are appealing: Inference for phylogenetic trees in linguistics. Principled aggregration of mass univariate analyses from neuroimaging.
32 References [1] C. Andrieu, A. Doucet, and R. Holenstein. Particle Markov chain Monte Carlo. Journal of the Royal Statistical Society B, 72(3): , [2] N. Chopin. A sequential particle filter method for static models. Biometrika, 89(3): , [3] P. Del Moral. Feynman-Kac formulae: genealogical and interacting particle systems with applications. Probability and Its Applications. Springer Verlag, New York, [4] P. Del Moral, A. Doucet, and A. Jasra. methods for Bayesian Computation. In Bayesian Statistics 8. Oxford University Press, [5] A. Doucet and A. M. Johansen. A tutorial on particle filtering and smoothing: Fiteen years later. In D. Crisan and B. Rozovsky, editors, The Oxford Handbook of Nonlinear Filtering, pages Oxford University Press, [6] N. J. Gordon, S. J. Salmond, and A. F. M. Smith. Novel approach to nonlinear/non-gaussian Bayesian state estimation. IEE Proceedings-F, 140(2): , April [7] A. Jasra, D. A. Stephens, A. Doucet, and T. Tsagaris. Inference for Lévy-Driven Stochastic Volatility Models via Adaptive. Scandinavian Journal of Statistics, 38(1):1 22, Dec [8] A. M. Johansen and A. Doucet. A note on the auxiliary particle filter. Statistics and Probability Letters, 78 (12): , September URL [9] F. Lindsten, A. M. Johansen, C. A. Naesseth, B. Kirkpatrick, T. Schön, J. A. D. Aston, and A. Bouchard-Côté. Divide and conquer with sequential Monte Carlo samplers. Journal of Computational and Graphical Statistics, In press. [10] Y. Zhou, A. M. Johansen, and J. A. D. Aston. Towards automatic model comparison: An adaptive sequential Monte Carlo approach. Journal of Computational and Graphical Statistics, 25(3): , doi: /
An Brief Overview of Particle Filtering
 1 An Brief Overview of Particle Filtering Adam M. Johansen a.m.johansen@warwick.ac.uk www2.warwick.ac.uk/fac/sci/statistics/staff/academic/johansen/talks/ May 11th, 2010 Warwick University Centre for Systems
1 An Brief Overview of Particle Filtering Adam M. Johansen a.m.johansen@warwick.ac.uk www2.warwick.ac.uk/fac/sci/statistics/staff/academic/johansen/talks/ May 11th, 2010 Warwick University Centre for Systems
Monte Carlo Approximation of Monte Carlo Filters
 Monte Carlo Approximation of Monte Carlo Filters Adam M. Johansen et al. Collaborators Include: Arnaud Doucet, Axel Finke, Anthony Lee, Nick Whiteley 7th January 2014 Context & Outline Filtering in State-Space
Monte Carlo Approximation of Monte Carlo Filters Adam M. Johansen et al. Collaborators Include: Arnaud Doucet, Axel Finke, Anthony Lee, Nick Whiteley 7th January 2014 Context & Outline Filtering in State-Space
The Hierarchical Particle Filter
 and Arnaud Doucet http://go.warwick.ac.uk/amjohansen/talks MCMSki V Lenzerheide 7th January 2016 Context & Outline Filtering in State-Space Models: SIR Particle Filters [GSS93] Block-Sampling Particle
and Arnaud Doucet http://go.warwick.ac.uk/amjohansen/talks MCMSki V Lenzerheide 7th January 2016 Context & Outline Filtering in State-Space Models: SIR Particle Filters [GSS93] Block-Sampling Particle
Divide-and-Conquer with Sequential Monte Carlo
 Divide-and-Conquer with Sequential Monte Carlo F. Lindsten,3, A. M. Johansen 2, C. A. Naesseth 3, B. Kirkpatrick 4, T. B. Schön 5, J. A. D. Aston, and A. Bouchard-Côté 6 arxiv:46.4993v2 [stat.co] 3 Jun
Divide-and-Conquer with Sequential Monte Carlo F. Lindsten,3, A. M. Johansen 2, C. A. Naesseth 3, B. Kirkpatrick 4, T. B. Schön 5, J. A. D. Aston, and A. Bouchard-Côté 6 arxiv:46.4993v2 [stat.co] 3 Jun
Controlled sequential Monte Carlo
 Controlled sequential Monte Carlo Jeremy Heng, Department of Statistics, Harvard University Joint work with Adrian Bishop (UTS, CSIRO), George Deligiannidis & Arnaud Doucet (Oxford) Bayesian Computation
Controlled sequential Monte Carlo Jeremy Heng, Department of Statistics, Harvard University Joint work with Adrian Bishop (UTS, CSIRO), George Deligiannidis & Arnaud Doucet (Oxford) Bayesian Computation
Exercises Tutorial at ICASSP 2016 Learning Nonlinear Dynamical Models Using Particle Filters
 Exercises Tutorial at ICASSP 216 Learning Nonlinear Dynamical Models Using Particle Filters Andreas Svensson, Johan Dahlin and Thomas B. Schön March 18, 216 Good luck! 1 [Bootstrap particle filter for
Exercises Tutorial at ICASSP 216 Learning Nonlinear Dynamical Models Using Particle Filters Andreas Svensson, Johan Dahlin and Thomas B. Schön March 18, 216 Good luck! 1 [Bootstrap particle filter for
Supplementary material for Divide-and-Conquer with Sequential Monte Carlo
 Supplementary material for Divide-and-Conquer with Sequential Monte Carlo F. Lindsten, A. M. Johansen 2, C. A. Naesseth 3, B. Kirkpatrick 4, T. B. Schön, J. A. D. Aston 5, and A. Bouchard-Côté 6 June 3,
Supplementary material for Divide-and-Conquer with Sequential Monte Carlo F. Lindsten, A. M. Johansen 2, C. A. Naesseth 3, B. Kirkpatrick 4, T. B. Schön, J. A. D. Aston 5, and A. Bouchard-Côté 6 June 3,
Sequential Monte Carlo Methods for Bayesian Computation
 Sequential Monte Carlo Methods for Bayesian Computation A. Doucet Kyoto Sept. 2012 A. Doucet (MLSS Sept. 2012) Sept. 2012 1 / 136 Motivating Example 1: Generic Bayesian Model Let X be a vector parameter
Sequential Monte Carlo Methods for Bayesian Computation A. Doucet Kyoto Sept. 2012 A. Doucet (MLSS Sept. 2012) Sept. 2012 1 / 136 Motivating Example 1: Generic Bayesian Model Let X be a vector parameter
Advanced Computational Methods in Statistics: Lecture 5 Sequential Monte Carlo/Particle Filtering
 Advanced Computational Methods in Statistics: Lecture 5 Sequential Monte Carlo/Particle Filtering Axel Gandy Department of Mathematics Imperial College London http://www2.imperial.ac.uk/~agandy London
Advanced Computational Methods in Statistics: Lecture 5 Sequential Monte Carlo/Particle Filtering Axel Gandy Department of Mathematics Imperial College London http://www2.imperial.ac.uk/~agandy London
1 / 31 Identification of nonlinear dynamic systems (guest lectures) Brussels, Belgium, June 8, 2015.
 Brussels, Belgium, June 8, 2015.") Outline Part 4 Nonlinear system identification using sequential Monte Carlo methods Part 4 Identification strategy 2 (Data augmentation) Aim: Show how SMC can be used to implement identification strategy
Outline Part 4 Nonlinear system identification using sequential Monte Carlo methods Part 4 Identification strategy 2 (Data augmentation) Aim: Show how SMC can be used to implement identification strategy
1 / 32 Summer school on Foundations and advances in stochastic filtering (FASF) Barcelona, Spain, June 22, 2015.
 Barcelona, Spain, June 22, 2015.") Outline Part 4 Nonlinear system identification using sequential Monte Carlo methods Part 4 Identification strategy 2 (Data augmentation) Aim: Show how SMC can be used to implement identification strategy
Outline Part 4 Nonlinear system identification using sequential Monte Carlo methods Part 4 Identification strategy 2 (Data augmentation) Aim: Show how SMC can be used to implement identification strategy
An introduction to Sequential Monte Carlo
 An introduction to Sequential Monte Carlo Thang Bui Jes Frellsen Department of Engineering University of Cambridge Research and Communication Club 6 February 2014 1 Sequential Monte Carlo (SMC) methods
An introduction to Sequential Monte Carlo Thang Bui Jes Frellsen Department of Engineering University of Cambridge Research and Communication Club 6 February 2014 1 Sequential Monte Carlo (SMC) methods
Auxiliary Particle Methods
 Auxiliary Particle Methods Perspectives & Applications Adam M. Johansen 1 adam.johansen@bristol.ac.uk Oxford University Man Institute 29th May 2008 1 Collaborators include: Arnaud Doucet, Nick Whiteley
Auxiliary Particle Methods Perspectives & Applications Adam M. Johansen 1 adam.johansen@bristol.ac.uk Oxford University Man Institute 29th May 2008 1 Collaborators include: Arnaud Doucet, Nick Whiteley
A Note on Auxiliary Particle Filters
 A Note on Auxiliary Particle Filters Adam M. Johansen a,, Arnaud Doucet b a Department of Mathematics, University of Bristol, UK b Departments of Statistics & Computer Science, University of British Columbia,
A Note on Auxiliary Particle Filters Adam M. Johansen a,, Arnaud Doucet b a Department of Mathematics, University of Bristol, UK b Departments of Statistics & Computer Science, University of British Columbia,
SMC 2 : an efficient algorithm for sequential analysis of state-space models
 SMC 2 : an efficient algorithm for sequential analysis of state-space models N. CHOPIN 1, P.E. JACOB 2, & O. PAPASPILIOPOULOS 3 1 ENSAE-CREST 2 CREST & Université Paris Dauphine, 3 Universitat Pompeu Fabra
SMC 2 : an efficient algorithm for sequential analysis of state-space models N. CHOPIN 1, P.E. JACOB 2, & O. PAPASPILIOPOULOS 3 1 ENSAE-CREST 2 CREST & Université Paris Dauphine, 3 Universitat Pompeu Fabra
Adversarial Sequential Monte Carlo
 Adversarial Sequential Monte Carlo Kira Kempinska Department of Security and Crime Science University College London London, WC1E 6BT kira.kowalska.13@ucl.ac.uk John Shawe-Taylor Department of Computer
Adversarial Sequential Monte Carlo Kira Kempinska Department of Security and Crime Science University College London London, WC1E 6BT kira.kowalska.13@ucl.ac.uk John Shawe-Taylor Department of Computer
Sequential Monte Carlo Methods for Bayesian Model Selection in Positron Emission Tomography
 Methods for Bayesian Model Selection in Positron Emission Tomography Yan Zhou John A.D. Aston and Adam M. Johansen 6th January 2014 Y. Zhou J. A. D. Aston and A. M. Johansen Outline Positron emission tomography
Methods for Bayesian Model Selection in Positron Emission Tomography Yan Zhou John A.D. Aston and Adam M. Johansen 6th January 2014 Y. Zhou J. A. D. Aston and A. M. Johansen Outline Positron emission tomography
L09. PARTICLE FILTERING. NA568 Mobile Robotics: Methods & Algorithms
 L09. PARTICLE FILTERING NA568 Mobile Robotics: Methods & Algorithms Particle Filters Different approach to state estimation Instead of parametric description of state (and uncertainty), use a set of state
L09. PARTICLE FILTERING NA568 Mobile Robotics: Methods & Algorithms Particle Filters Different approach to state estimation Instead of parametric description of state (and uncertainty), use a set of state
Sequential Monte Carlo in the machine learning toolbox
 Sequential Monte Carlo in the machine learning toolbox Working with the trend of blending Thomas Schön Uppsala University Sweden. Symposium on Advances in Approximate Bayesian Inference (AABI) Montréal,
Sequential Monte Carlo in the machine learning toolbox Working with the trend of blending Thomas Schön Uppsala University Sweden. Symposium on Advances in Approximate Bayesian Inference (AABI) Montréal,
Sequential Monte Carlo methods for system identification
 Technical report arxiv:1503.06058v3 [stat.co] 10 Mar 2016 Sequential Monte Carlo methods for system identification Thomas B. Schön, Fredrik Lindsten, Johan Dahlin, Johan Wågberg, Christian A. Naesseth,
Technical report arxiv:1503.06058v3 [stat.co] 10 Mar 2016 Sequential Monte Carlo methods for system identification Thomas B. Schön, Fredrik Lindsten, Johan Dahlin, Johan Wågberg, Christian A. Naesseth,
Introduction. log p θ (y k y 1:k 1 ), k=1
, k=1") ESAIM: PROCEEDINGS, September 2007, Vol.19, 115-120 Christophe Andrieu & Dan Crisan, Editors DOI: 10.1051/proc:071915 PARTICLE FILTER-BASED APPROXIMATE MAXIMUM LIKELIHOOD INFERENCE ASYMPTOTICS IN STATE-SPACE
ESAIM: PROCEEDINGS, September 2007, Vol.19, 115-120 Christophe Andrieu & Dan Crisan, Editors DOI: 10.1051/proc:071915 PARTICLE FILTER-BASED APPROXIMATE MAXIMUM LIKELIHOOD INFERENCE ASYMPTOTICS IN STATE-SPACE
A Review of Pseudo-Marginal Markov Chain Monte Carlo
 A Review of Pseudo-Marginal Markov Chain Monte Carlo Discussed by: Yizhe Zhang October 21, 2016 Outline 1 Overview 2 Paper review 3 experiment 4 conclusion Motivation & overview Notation: θ denotes the
A Review of Pseudo-Marginal Markov Chain Monte Carlo Discussed by: Yizhe Zhang October 21, 2016 Outline 1 Overview 2 Paper review 3 experiment 4 conclusion Motivation & overview Notation: θ denotes the
Sequential Monte Carlo Samplers for Applications in High Dimensions
 Sequential Monte Carlo Samplers for Applications in High Dimensions Alexandros Beskos National University of Singapore KAUST, 26th February 2014 Joint work with: Dan Crisan, Ajay Jasra, Nik Kantas, Alex
Sequential Monte Carlo Samplers for Applications in High Dimensions Alexandros Beskos National University of Singapore KAUST, 26th February 2014 Joint work with: Dan Crisan, Ajay Jasra, Nik Kantas, Alex
Learning Static Parameters in Stochastic Processes
 Learning Static Parameters in Stochastic Processes Bharath Ramsundar December 14, 2012 1 Introduction Consider a Markovian stochastic process X T evolving (perhaps nonlinearly) over time variable T. We
Learning Static Parameters in Stochastic Processes Bharath Ramsundar December 14, 2012 1 Introduction Consider a Markovian stochastic process X T evolving (perhaps nonlinearly) over time variable T. We
Sequential Monte Carlo and Particle Filtering. Frank Wood Gatsby, November 2007
 Sequential Monte Carlo and Particle Filtering Frank Wood Gatsby, November 2007 Importance Sampling Recall: Let s say that we want to compute some expectation (integral) E p [f] = p(x)f(x)dx and we remember
Sequential Monte Carlo and Particle Filtering Frank Wood Gatsby, November 2007 Importance Sampling Recall: Let s say that we want to compute some expectation (integral) E p [f] = p(x)f(x)dx and we remember
Sequential Monte Carlo samplers
 J. R. Statist. Soc. B (2006) 68, Part 3, pp. 411 436 Sequential Monte Carlo samplers Pierre Del Moral, Université Nice Sophia Antipolis, France Arnaud Doucet University of British Columbia, Vancouver,
J. R. Statist. Soc. B (2006) 68, Part 3, pp. 411 436 Sequential Monte Carlo samplers Pierre Del Moral, Université Nice Sophia Antipolis, France Arnaud Doucet University of British Columbia, Vancouver,
Particle Filtering a brief introductory tutorial. Frank Wood Gatsby, August 2007
 Particle Filtering a brief introductory tutorial Frank Wood Gatsby, August 2007 Problem: Target Tracking A ballistic projectile has been launched in our direction and may or may not land near enough to
Particle Filtering a brief introductory tutorial Frank Wood Gatsby, August 2007 Problem: Target Tracking A ballistic projectile has been launched in our direction and may or may not land near enough to
Kernel adaptive Sequential Monte Carlo
 Kernel adaptive Sequential Monte Carlo Ingmar Schuster (Paris Dauphine) Heiko Strathmann (University College London) Brooks Paige (Oxford) Dino Sejdinovic (Oxford) December 7, 2015 1 / 36 Section 1 Outline
Kernel adaptive Sequential Monte Carlo Ingmar Schuster (Paris Dauphine) Heiko Strathmann (University College London) Brooks Paige (Oxford) Dino Sejdinovic (Oxford) December 7, 2015 1 / 36 Section 1 Outline
Package RcppSMC. March 18, 2018
 Type Package Title Rcpp Bindings for Sequential Monte Carlo Version 0.2.1 Date 2018-03-18 Package RcppSMC March 18, 2018 Author Dirk Eddelbuettel, Adam M. Johansen and Leah F. South Maintainer Dirk Eddelbuettel
Type Package Title Rcpp Bindings for Sequential Monte Carlo Version 0.2.1 Date 2018-03-18 Package RcppSMC March 18, 2018 Author Dirk Eddelbuettel, Adam M. Johansen and Leah F. South Maintainer Dirk Eddelbuettel
An ABC interpretation of the multiple auxiliary variable method
 School of Mathematical and Physical Sciences Department of Mathematics and Statistics Preprint MPS-2016-07 27 April 2016 An ABC interpretation of the multiple auxiliary variable method by Dennis Prangle
School of Mathematical and Physical Sciences Department of Mathematics and Statistics Preprint MPS-2016-07 27 April 2016 An ABC interpretation of the multiple auxiliary variable method by Dennis Prangle
Density Estimation. Seungjin Choi
 Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
Density Estimation Seungjin Choi Department of Computer Science and Engineering Pohang University of Science and Technology 77 Cheongam-ro, Nam-gu, Pohang 37673, Korea seungjin@postech.ac.kr http://mlg.postech.ac.kr/
Concentration inequalities for Feynman-Kac particle models. P. Del Moral. INRIA Bordeaux & IMB & CMAP X. Journées MAS 2012, SMAI Clermond-Ferrand
 Concentration inequalities for Feynman-Kac particle models P. Del Moral INRIA Bordeaux & IMB & CMAP X Journées MAS 2012, SMAI Clermond-Ferrand Some hyper-refs Feynman-Kac formulae, Genealogical & Interacting
Concentration inequalities for Feynman-Kac particle models P. Del Moral INRIA Bordeaux & IMB & CMAP X Journées MAS 2012, SMAI Clermond-Ferrand Some hyper-refs Feynman-Kac formulae, Genealogical & Interacting
Sequential Monte Carlo for Graphical Models
 Sequential Monte Carlo for Graphical Models Christian A. Naesseth Div. of Automatic Control Linköping University Linköping, Sweden chran60@isy.liu.se Fredrik Lindsten Dept. of Engineering The University
Sequential Monte Carlo for Graphical Models Christian A. Naesseth Div. of Automatic Control Linköping University Linköping, Sweden chran60@isy.liu.se Fredrik Lindsten Dept. of Engineering The University
An Introduction to Particle Filtering
 An Introduction to Particle Filtering Author: Lisa Turner Supervisor: Dr. Christopher Sherlock 10th May 2013 Abstract This report introduces the ideas behind particle filters, looking at the Kalman filter
An Introduction to Particle Filtering Author: Lisa Turner Supervisor: Dr. Christopher Sherlock 10th May 2013 Abstract This report introduces the ideas behind particle filters, looking at the Kalman filter
Graphical model inference: Sequential Monte Carlo meets deterministic approximations
 Graphical model inference: Sequential Monte Carlo meets deterministic approximations Fredrik Lindsten Department of Information Technology Uppsala University Uppsala, Sweden fredrik.lindsten@it.uu.se Jouni
Graphical model inference: Sequential Monte Carlo meets deterministic approximations Fredrik Lindsten Department of Information Technology Uppsala University Uppsala, Sweden fredrik.lindsten@it.uu.se Jouni
An introduction to particle filters
 An introduction to particle filters Andreas Svensson Department of Information Technology Uppsala University June 10, 2014 June 10, 2014, 1 / 16 Andreas Svensson - An introduction to particle filters Outline
An introduction to particle filters Andreas Svensson Department of Information Technology Uppsala University June 10, 2014 June 10, 2014, 1 / 16 Andreas Svensson - An introduction to particle filters Outline
Particle Filtering for Data-Driven Simulation and Optimization
 Particle Filtering for Data-Driven Simulation and Optimization John R. Birge The University of Chicago Booth School of Business Includes joint work with Nicholas Polson. JRBirge INFORMS Phoenix, October
Particle Filtering for Data-Driven Simulation and Optimization John R. Birge The University of Chicago Booth School of Business Includes joint work with Nicholas Polson. JRBirge INFORMS Phoenix, October
Sequential Monte Carlo Methods (for DSGE Models)
") Sequential Monte Carlo Methods (for DSGE Models) Frank Schorfheide University of Pennsylvania, PIER, CEPR, and NBER October 23, 2017 Some References These lectures use material from our joint work: Tempered
Sequential Monte Carlo Methods (for DSGE Models) Frank Schorfheide University of Pennsylvania, PIER, CEPR, and NBER October 23, 2017 Some References These lectures use material from our joint work: Tempered
Inference in state-space models with multiple paths from conditional SMC
 Inference in state-space models with multiple paths from conditional SMC Sinan Yıldırım (Sabancı) joint work with Christophe Andrieu (Bristol), Arnaud Doucet (Oxford) and Nicolas Chopin (ENSAE) September
Inference in state-space models with multiple paths from conditional SMC Sinan Yıldırım (Sabancı) joint work with Christophe Andrieu (Bristol), Arnaud Doucet (Oxford) and Nicolas Chopin (ENSAE) September
Introduction to Particle Filters for Data Assimilation
 Introduction to Particle Filters for Data Assimilation Mike Dowd Dept of Mathematics & Statistics (and Dept of Oceanography Dalhousie University, Halifax, Canada STATMOS Summer School in Data Assimila5on,
Introduction to Particle Filters for Data Assimilation Mike Dowd Dept of Mathematics & Statistics (and Dept of Oceanography Dalhousie University, Halifax, Canada STATMOS Summer School in Data Assimila5on,
Bayesian Computations for DSGE Models
 Bayesian Computations for DSGE Models Frank Schorfheide University of Pennsylvania, PIER, CEPR, and NBER October 23, 2017 This Lecture is Based on Bayesian Estimation of DSGE Models Edward P. Herbst &
Bayesian Computations for DSGE Models Frank Schorfheide University of Pennsylvania, PIER, CEPR, and NBER October 23, 2017 This Lecture is Based on Bayesian Estimation of DSGE Models Edward P. Herbst &
Kernel Sequential Monte Carlo
 Kernel Sequential Monte Carlo Ingmar Schuster (Paris Dauphine) Heiko Strathmann (University College London) Brooks Paige (Oxford) Dino Sejdinovic (Oxford) * equal contribution April 25, 2016 1 / 37 Section
Kernel Sequential Monte Carlo Ingmar Schuster (Paris Dauphine) Heiko Strathmann (University College London) Brooks Paige (Oxford) Dino Sejdinovic (Oxford) * equal contribution April 25, 2016 1 / 37 Section
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA
 PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
PATTERN RECOGNITION AND MACHINE LEARNING CHAPTER 13: SEQUENTIAL DATA Contents in latter part Linear Dynamical Systems What is different from HMM? Kalman filter Its strength and limitation Particle Filter
Computer Intensive Methods in Mathematical Statistics
 Computer Intensive Methods in Mathematical Statistics Department of mathematics johawes@kth.se Lecture 16 Advanced topics in computational statistics 18 May 2017 Computer Intensive Methods (1) Plan of
Computer Intensive Methods in Mathematical Statistics Department of mathematics johawes@kth.se Lecture 16 Advanced topics in computational statistics 18 May 2017 Computer Intensive Methods (1) Plan of
Markov Chain Monte Carlo Methods for Stochastic Optimization
 Markov Chain Monte Carlo Methods for Stochastic Optimization John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge U of Toronto, MIE,
Markov Chain Monte Carlo Methods for Stochastic Optimization John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge U of Toronto, MIE,
Particle Filtering Approaches for Dynamic Stochastic Optimization
 Particle Filtering Approaches for Dynamic Stochastic Optimization John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge I-Sim Workshop,
Particle Filtering Approaches for Dynamic Stochastic Optimization John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge I-Sim Workshop,
arxiv: v1 [stat.co] 1 Jun 2015
![arxiv: v1 [stat.co] 1 Jun 2015](/thumbs/82/86446578.jpg "arxiv: v1 [stat.co] 1 Jun 2015") arxiv:1506.00570v1 [stat.co] 1 Jun 2015 Towards automatic calibration of the number of state particles within the SMC 2 algorithm N. Chopin J. Ridgway M. Gerber O. Papaspiliopoulos CREST-ENSAE, Malakoff,
arxiv:1506.00570v1 [stat.co] 1 Jun 2015 Towards automatic calibration of the number of state particles within the SMC 2 algorithm N. Chopin J. Ridgway M. Gerber O. Papaspiliopoulos CREST-ENSAE, Malakoff,
An efficient stochastic approximation EM algorithm using conditional particle filters
 An efficient stochastic approximation EM algorithm using conditional particle filters Fredrik Lindsten Linköping University Post Print N.B.: When citing this work, cite the original article. Original Publication:
An efficient stochastic approximation EM algorithm using conditional particle filters Fredrik Lindsten Linköping University Post Print N.B.: When citing this work, cite the original article. Original Publication:
LTCC: Advanced Computational Methods in Statistics
 LTCC: Advanced Computational Methods in Statistics Advanced Particle Methods & Parameter estimation for HMMs N. Kantas Notes at http://wwwf.imperial.ac.uk/~nkantas/notes4ltcc.pdf Slides at http://wwwf.imperial.ac.uk/~nkantas/slides4.pdf
LTCC: Advanced Computational Methods in Statistics Advanced Particle Methods & Parameter estimation for HMMs N. Kantas Notes at http://wwwf.imperial.ac.uk/~nkantas/notes4ltcc.pdf Slides at http://wwwf.imperial.ac.uk/~nkantas/slides4.pdf
Sensor Fusion: Particle Filter
 Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
Sensor Fusion: Particle Filter By: Gordana Stojceska stojcesk@in.tum.de Outline Motivation Applications Fundamentals Tracking People Advantages and disadvantages Summary June 05 JASS '05, St.Petersburg,
A new class of interacting Markov Chain Monte Carlo methods
 A new class of interacting Marov Chain Monte Carlo methods P Del Moral, A Doucet INRIA Bordeaux & UBC Vancouver Worshop on Numerics and Stochastics, Helsini, August 2008 Outline 1 Introduction Stochastic
A new class of interacting Marov Chain Monte Carlo methods P Del Moral, A Doucet INRIA Bordeaux & UBC Vancouver Worshop on Numerics and Stochastics, Helsini, August 2008 Outline 1 Introduction Stochastic
Sequential Monte Carlo Methods
 National University of Singapore KAUST, October 14th 2014 Monte Carlo Importance Sampling Markov chain Monte Carlo Sequential Importance Sampling Resampling + Weight Degeneracy Path Degeneracy Algorithm
National University of Singapore KAUST, October 14th 2014 Monte Carlo Importance Sampling Markov chain Monte Carlo Sequential Importance Sampling Resampling + Weight Degeneracy Path Degeneracy Algorithm
Sequential Monte Carlo Methods
 University of Pennsylvania Bradley Visitor Lectures October 23, 2017 Introduction Unfortunately, standard MCMC can be inaccurate, especially in medium and large-scale DSGE models: disentangling importance
University of Pennsylvania Bradley Visitor Lectures October 23, 2017 Introduction Unfortunately, standard MCMC can be inaccurate, especially in medium and large-scale DSGE models: disentangling importance
Identification of Gaussian Process State-Space Models with Particle Stochastic Approximation EM
 Identification of Gaussian Process State-Space Models with Particle Stochastic Approximation EM Roger Frigola Fredrik Lindsten Thomas B. Schön, Carl E. Rasmussen Dept. of Engineering, University of Cambridge,
Identification of Gaussian Process State-Space Models with Particle Stochastic Approximation EM Roger Frigola Fredrik Lindsten Thomas B. Schön, Carl E. Rasmussen Dept. of Engineering, University of Cambridge,
The chopthin algorithm for resampling
 The chopthin algorithm for resampling Axel Gandy F. Din-Houn Lau Department of Mathematics, Imperial College London Abstract Resampling is a standard step in particle filters and more generally sequential
The chopthin algorithm for resampling Axel Gandy F. Din-Houn Lau Department of Mathematics, Imperial College London Abstract Resampling is a standard step in particle filters and more generally sequential
Monte Carlo Solution of Integral Equations
 1 Monte Carlo Solution of Integral Equations of the second kind Adam M. Johansen a.m.johansen@warwick.ac.uk www2.warwick.ac.uk/fac/sci/statistics/staff/academic/johansen/talks/ March 7th, 2011 MIRaW Monte
1 Monte Carlo Solution of Integral Equations of the second kind Adam M. Johansen a.m.johansen@warwick.ac.uk www2.warwick.ac.uk/fac/sci/statistics/staff/academic/johansen/talks/ March 7th, 2011 MIRaW Monte
Efficient Monitoring for Planetary Rovers
 International Symposium on Artificial Intelligence and Robotics in Space (isairas), May, 2003 Efficient Monitoring for Planetary Rovers Vandi Verma vandi@ri.cmu.edu Geoff Gordon ggordon@cs.cmu.edu Carnegie
International Symposium on Artificial Intelligence and Robotics in Space (isairas), May, 2003 Efficient Monitoring for Planetary Rovers Vandi Verma vandi@ri.cmu.edu Geoff Gordon ggordon@cs.cmu.edu Carnegie
Data-driven Particle Filters for Particle Markov Chain Monte Carlo
 Data-driven Particle Filters for Particle Markov Chain Monte Carlo Patrick Leung, Catherine S. Forbes, Gael M. Martin and Brendan McCabe September 13, 2016 Abstract This paper proposes new automated proposal
Data-driven Particle Filters for Particle Markov Chain Monte Carlo Patrick Leung, Catherine S. Forbes, Gael M. Martin and Brendan McCabe September 13, 2016 Abstract This paper proposes new automated proposal
Markov Chain Monte Carlo Methods for Stochastic
 Markov Chain Monte Carlo Methods for Stochastic Optimization i John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge U Florida, Nov 2013
Markov Chain Monte Carlo Methods for Stochastic Optimization i John R. Birge The University of Chicago Booth School of Business Joint work with Nicholas Polson, Chicago Booth. JRBirge U Florida, Nov 2013
Identification of Gaussian Process State-Space Models with Particle Stochastic Approximation EM
 Preprints of the 9th World Congress The International Federation of Automatic Control Identification of Gaussian Process State-Space Models with Particle Stochastic Approximation EM Roger Frigola Fredrik
Preprints of the 9th World Congress The International Federation of Automatic Control Identification of Gaussian Process State-Space Models with Particle Stochastic Approximation EM Roger Frigola Fredrik
Pseudo-marginal MCMC methods for inference in latent variable models
 Pseudo-marginal MCMC methods for inference in latent variable models Arnaud Doucet Department of Statistics, Oxford University Joint work with George Deligiannidis (Oxford) & Mike Pitt (Kings) MCQMC, 19/08/2016
Pseudo-marginal MCMC methods for inference in latent variable models Arnaud Doucet Department of Statistics, Oxford University Joint work with George Deligiannidis (Oxford) & Mike Pitt (Kings) MCQMC, 19/08/2016
Bayesian Sequential Design under Model Uncertainty using Sequential Monte Carlo
 Bayesian Sequential Design under Model Uncertainty using Sequential Monte Carlo, James McGree, Tony Pettitt October 7, 2 Introduction Motivation Model choice abundant throughout literature Take into account
Bayesian Sequential Design under Model Uncertainty using Sequential Monte Carlo, James McGree, Tony Pettitt October 7, 2 Introduction Motivation Model choice abundant throughout literature Take into account
Lecture 8: Bayesian Estimation of Parameters in State Space Models
 in State Space Models March 30, 2016 Contents 1 Bayesian estimation of parameters in state space models 2 Computational methods for parameter estimation 3 Practical parameter estimation in state space
in State Space Models March 30, 2016 Contents 1 Bayesian estimation of parameters in state space models 2 Computational methods for parameter estimation 3 Practical parameter estimation in state space
Recent Developments in Auxiliary Particle Filtering
 Chapter 3 Recent Developments in Auxiliary Particle Filtering Nick Whiteley 1 and Adam M. Johansen 2 3.1 Background 3.1.1 State Space Models State space models (SSMs; sometimes termed hidden Markov models,
Chapter 3 Recent Developments in Auxiliary Particle Filtering Nick Whiteley 1 and Adam M. Johansen 2 3.1 Background 3.1.1 State Space Models State space models (SSMs; sometimes termed hidden Markov models,
Mean field simulation for Monte Carlo integration. Part II : Feynman-Kac models. P. Del Moral
 Mean field simulation for Monte Carlo integration Part II : Feynman-Kac models P. Del Moral INRIA Bordeaux & Inst. Maths. Bordeaux & CMAP Polytechnique Lectures, INLN CNRS & Nice Sophia Antipolis Univ.
Mean field simulation for Monte Carlo integration Part II : Feynman-Kac models P. Del Moral INRIA Bordeaux & Inst. Maths. Bordeaux & CMAP Polytechnique Lectures, INLN CNRS & Nice Sophia Antipolis Univ.
Computer Intensive Methods in Mathematical Statistics
 Computer Intensive Methods in Mathematical Statistics Department of mathematics johawes@kth.se Lecture 7 Sequential Monte Carlo methods III 7 April 2017 Computer Intensive Methods (1) Plan of today s lecture
Computer Intensive Methods in Mathematical Statistics Department of mathematics johawes@kth.se Lecture 7 Sequential Monte Carlo methods III 7 April 2017 Computer Intensive Methods (1) Plan of today s lecture
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
Lecture 2: From Linear Regression to Kalman Filter and Beyond January 18, 2017 Contents 1 Batch and Recursive Estimation 2 Towards Bayesian Filtering 3 Kalman Filter and Bayesian Filtering and Smoothing
RAO-BLACKWELLIZED PARTICLE FILTER FOR MARKOV MODULATED NONLINEARDYNAMIC SYSTEMS
 RAO-BLACKWELLIZED PARTICLE FILTER FOR MARKOV MODULATED NONLINEARDYNAMIC SYSTEMS Saiat Saha and Gustaf Hendeby Linöping University Post Print N.B.: When citing this wor, cite the original article. 2014
RAO-BLACKWELLIZED PARTICLE FILTER FOR MARKOV MODULATED NONLINEARDYNAMIC SYSTEMS Saiat Saha and Gustaf Hendeby Linöping University Post Print N.B.: When citing this wor, cite the original article. 2014
Data-driven Particle Filters for Particle Markov Chain Monte Carlo
 Data-driven Particle Filters for Particle Markov Chain Monte Carlo Patrick Leung, Catherine S. Forbes, Gael M. Martin and Brendan McCabe December 21, 2016 Abstract This paper proposes new automated proposal
Data-driven Particle Filters for Particle Markov Chain Monte Carlo Patrick Leung, Catherine S. Forbes, Gael M. Martin and Brendan McCabe December 21, 2016 Abstract This paper proposes new automated proposal
A new iterated filtering algorithm
 A new iterated filtering algorithm Edward Ionides University of Michigan, Ann Arbor ionides@umich.edu Statistics and Nonlinear Dynamics in Biology and Medicine Thursday July 31, 2014 Overview 1 Introduction
A new iterated filtering algorithm Edward Ionides University of Michigan, Ann Arbor ionides@umich.edu Statistics and Nonlinear Dynamics in Biology and Medicine Thursday July 31, 2014 Overview 1 Introduction
Learning of state-space models with highly informative observations: a tempered Sequential Monte Carlo solution
 Learning of state-space models with highly informative observations: a tempered Sequential Monte Carlo solution Andreas Svensson, Thomas B. Schön, and Fredrik Lindsten Department of Information Technology,
Learning of state-space models with highly informative observations: a tempered Sequential Monte Carlo solution Andreas Svensson, Thomas B. Schön, and Fredrik Lindsten Department of Information Technology,
The Particle Filter. PD Dr. Rudolph Triebel Computer Vision Group. Machine Learning for Computer Vision
 The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
The Particle Filter Non-parametric implementation of Bayes filter Represents the belief (posterior) random state samples. by a set of This representation is approximate. Can represent distributions that
List of projects. FMS020F NAMS002 Statistical inference for partially observed stochastic processes, 2016
 List of projects FMS020F NAMS002 Statistical inference for partially observed stochastic processes, 206 Work in groups of two (if this is absolutely not possible for some reason, please let the lecturers
List of projects FMS020F NAMS002 Statistical inference for partially observed stochastic processes, 206 Work in groups of two (if this is absolutely not possible for some reason, please let the lecturers
Notes on pseudo-marginal methods, variational Bayes and ABC
 Notes on pseudo-marginal methods, variational Bayes and ABC Christian Andersson Naesseth October 3, 2016 The Pseudo-Marginal Framework Assume we are interested in sampling from the posterior distribution
Notes on pseudo-marginal methods, variational Bayes and ABC Christian Andersson Naesseth October 3, 2016 The Pseudo-Marginal Framework Assume we are interested in sampling from the posterior distribution
TSRT14: Sensor Fusion Lecture 8
 TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
TSRT14: Sensor Fusion Lecture 8 Particle filter theory Marginalized particle filter Gustaf Hendeby gustaf.hendeby@liu.se TSRT14 Lecture 8 Gustaf Hendeby Spring 2018 1 / 25 Le 8: particle filter theory,
Infinite-State Markov-switching for Dynamic. Volatility Models : Web Appendix
 Infinite-State Markov-switching for Dynamic Volatility Models : Web Appendix Arnaud Dufays 1 Centre de Recherche en Economie et Statistique March 19, 2014 1 Comparison of the two MS-GARCH approximations
Infinite-State Markov-switching for Dynamic Volatility Models : Web Appendix Arnaud Dufays 1 Centre de Recherche en Economie et Statistique March 19, 2014 1 Comparison of the two MS-GARCH approximations
Adaptive Population Monte Carlo
 Adaptive Population Monte Carlo Olivier Cappé Centre Nat. de la Recherche Scientifique & Télécom Paris 46 rue Barrault, 75634 Paris cedex 13, France http://www.tsi.enst.fr/~cappe/ Recent Advances in Monte
Adaptive Population Monte Carlo Olivier Cappé Centre Nat. de la Recherche Scientifique & Télécom Paris 46 rue Barrault, 75634 Paris cedex 13, France http://www.tsi.enst.fr/~cappe/ Recent Advances in Monte
Particle Metropolis-Hastings using gradient and Hessian information
 Particle Metropolis-Hastings using gradient and Hessian information Johan Dahlin, Fredrik Lindsten and Thomas B. Schön September 19, 2014 Abstract Particle Metropolis-Hastings (PMH) allows for Bayesian
Particle Metropolis-Hastings using gradient and Hessian information Johan Dahlin, Fredrik Lindsten and Thomas B. Schön September 19, 2014 Abstract Particle Metropolis-Hastings (PMH) allows for Bayesian
Advanced Monte Carlo integration methods. P. Del Moral (INRIA team ALEA) INRIA & Bordeaux Mathematical Institute & X CMAP
 INRIA & Bordeaux Mathematical Institute & X CMAP") Advanced Monte Carlo integration methods P. Del Moral (INRIA team ALEA) INRIA & Bordeaux Mathematical Institute & X CMAP MCQMC 2012, Sydney, Sunday Tutorial 12-th 2012 Some hyper-refs Feynman-Kac formulae,
Advanced Monte Carlo integration methods P. Del Moral (INRIA team ALEA) INRIA & Bordeaux Mathematical Institute & X CMAP MCQMC 2012, Sydney, Sunday Tutorial 12-th 2012 Some hyper-refs Feynman-Kac formulae,
Sequential Bayesian Inference for Dynamic State Space. Model Parameters
 Sequential Bayesian Inference for Dynamic State Space Model Parameters Arnab Bhattacharya and Simon Wilson 1. INTRODUCTION Dynamic state-space models [24], consisting of a latent Markov process X 0,X 1,...
Sequential Bayesian Inference for Dynamic State Space Model Parameters Arnab Bhattacharya and Simon Wilson 1. INTRODUCTION Dynamic state-space models [24], consisting of a latent Markov process X 0,X 1,...
Graphical Models and Kernel Methods
 Graphical Models and Kernel Methods Jerry Zhu Department of Computer Sciences University of Wisconsin Madison, USA MLSS June 17, 2014 1 / 123 Outline Graphical Models Probabilistic Inference Directed vs.
Graphical Models and Kernel Methods Jerry Zhu Department of Computer Sciences University of Wisconsin Madison, USA MLSS June 17, 2014 1 / 123 Outline Graphical Models Probabilistic Inference Directed vs.
Practical Bayesian Optimization of Machine Learning. Learning Algorithms
 Practical Bayesian Optimization of Machine Learning Algorithms CS 294 University of California, Berkeley Tuesday, April 20, 2016 Motivation Machine Learning Algorithms (MLA s) have hyperparameters that
Practical Bayesian Optimization of Machine Learning Algorithms CS 294 University of California, Berkeley Tuesday, April 20, 2016 Motivation Machine Learning Algorithms (MLA s) have hyperparameters that
Particle Filters: Convergence Results and High Dimensions
 Particle Filters: Convergence Results and High Dimensions Mark Coates mark.coates@mcgill.ca McGill University Department of Electrical and Computer Engineering Montreal, Quebec, Canada Bellairs 2012 Outline
Particle Filters: Convergence Results and High Dimensions Mark Coates mark.coates@mcgill.ca McGill University Department of Electrical and Computer Engineering Montreal, Quebec, Canada Bellairs 2012 Outline
Parallel sequential Monte Carlo samplers and estimation of the number of states in a Hidden Markov Model
 Ann Inst Stat Math (2014) 66:553 575 DOI 10.1007/s10463-014-0450-4 SPECIAL ISSUE: BAYESIAN INFERENCE AND STOCHASTIC COMPUTATION Parallel sequential Monte Carlo samplers and estimation of the number of
Ann Inst Stat Math (2014) 66:553 575 DOI 10.1007/s10463-014-0450-4 SPECIAL ISSUE: BAYESIAN INFERENCE AND STOCHASTIC COMPUTATION Parallel sequential Monte Carlo samplers and estimation of the number of
Particle methods for maximum likelihood estimation in latent variable models
 DOI 10.1007/s11222-007-9037-8 Particle methods for maximum likelihood estimation in latent variable models Adam M. Johansen Arnaud Doucet Manuel Davy Received: 15 May 2007 / Accepted: 31 August 2007 Springer
DOI 10.1007/s11222-007-9037-8 Particle methods for maximum likelihood estimation in latent variable models Adam M. Johansen Arnaud Doucet Manuel Davy Received: 15 May 2007 / Accepted: 31 August 2007 Springer
EVALUATING SYMMETRIC INFORMATION GAP BETWEEN DYNAMICAL SYSTEMS USING PARTICLE FILTER
 EVALUATING SYMMETRIC INFORMATION GAP BETWEEN DYNAMICAL SYSTEMS USING PARTICLE FILTER Zhen Zhen 1, Jun Young Lee 2, and Abdus Saboor 3 1 Mingde College, Guizhou University, China zhenz2000@21cn.com 2 Department
EVALUATING SYMMETRIC INFORMATION GAP BETWEEN DYNAMICAL SYSTEMS USING PARTICLE FILTER Zhen Zhen 1, Jun Young Lee 2, and Abdus Saboor 3 1 Mingde College, Guizhou University, China zhenz2000@21cn.com 2 Department
Master Degree in Data Science. Particle Filtering for Nonlinear State Space Models. Hans-Peter Höllwirth. Director: Dr. Christian Brownlees
 Master Degree in Data Science Particle Filtering for Nonlinear State Space Models Hans-Peter Höllwirth Director: Dr. Christian Brownlees June 2017 ABSTRACT IN ENGLISH : This paper studies a novel particle
Master Degree in Data Science Particle Filtering for Nonlinear State Space Models Hans-Peter Höllwirth Director: Dr. Christian Brownlees June 2017 ABSTRACT IN ENGLISH : This paper studies a novel particle
Computer Intensive Methods in Mathematical Statistics
 Computer Intensive Methods in Mathematical Statistics Department of mathematics johawes@kth.se Lecture 5 Sequential Monte Carlo methods I 31 March 2017 Computer Intensive Methods (1) Plan of today s lecture
Computer Intensive Methods in Mathematical Statistics Department of mathematics johawes@kth.se Lecture 5 Sequential Monte Carlo methods I 31 March 2017 Computer Intensive Methods (1) Plan of today s lecture
MCMC for big data. Geir Storvik. BigInsight lunch - May Geir Storvik MCMC for big data BigInsight lunch - May / 17
 MCMC for big data Geir Storvik BigInsight lunch - May 2 2018 Geir Storvik MCMC for big data BigInsight lunch - May 2 2018 1 / 17 Outline Why ordinary MCMC is not scalable Different approaches for making
MCMC for big data Geir Storvik BigInsight lunch - May 2 2018 Geir Storvik MCMC for big data BigInsight lunch - May 2 2018 1 / 17 Outline Why ordinary MCMC is not scalable Different approaches for making
Lecture 2: From Linear Regression to Kalman Filter and Beyond
 Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Lecture 2: From Linear Regression to Kalman Filter and Beyond Department of Biomedical Engineering and Computational Science Aalto University January 26, 2012 Contents 1 Batch and Recursive Estimation
Integrated Non-Factorized Variational Inference
 Integrated Non-Factorized Variational Inference Shaobo Han, Xuejun Liao and Lawrence Carin Duke University February 27, 2014 S. Han et al. Integrated Non-Factorized Variational Inference February 27, 2014
Integrated Non-Factorized Variational Inference Shaobo Han, Xuejun Liao and Lawrence Carin Duke University February 27, 2014 S. Han et al. Integrated Non-Factorized Variational Inference February 27, 2014
Sequential Monte Carlo Methods in High Dimensions
 Sequential Monte Carlo Methods in High Dimensions Alexandros Beskos Statistical Science, UCL Oxford, 24th September 2012 Joint work with: Dan Crisan, Ajay Jasra, Nik Kantas, Andrew Stuart Imperial College,
Sequential Monte Carlo Methods in High Dimensions Alexandros Beskos Statistical Science, UCL Oxford, 24th September 2012 Joint work with: Dan Crisan, Ajay Jasra, Nik Kantas, Andrew Stuart Imperial College,
Bayesian Inference and MCMC
 Bayesian Inference and MCMC Aryan Arbabi Partly based on MCMC slides from CSC412 Fall 2018 1 / 18 Bayesian Inference - Motivation Consider we have a data set D = {x 1,..., x n }. E.g each x i can be the
Bayesian Inference and MCMC Aryan Arbabi Partly based on MCMC slides from CSC412 Fall 2018 1 / 18 Bayesian Inference - Motivation Consider we have a data set D = {x 1,..., x n }. E.g each x i can be the
Lecture Particle Filters
 FMS161/MASM18 Financial Statistics November 29, 2010 Monte Carlo filters The filter recursions could only be solved for HMMs and for linear, Gaussian models. Idea: Approximate any model with a HMM. Replace
FMS161/MASM18 Financial Statistics November 29, 2010 Monte Carlo filters The filter recursions could only be solved for HMMs and for linear, Gaussian models. Idea: Approximate any model with a HMM. Replace
Calibration of Stochastic Volatility Models using Particle Markov Chain Monte Carlo Methods
 Calibration of Stochastic Volatility Models using Particle Markov Chain Monte Carlo Methods Jonas Hallgren 1 1 Department of Mathematics KTH Royal Institute of Technology Stockholm, Sweden BFS 2012 June
Calibration of Stochastic Volatility Models using Particle Markov Chain Monte Carlo Methods Jonas Hallgren 1 1 Department of Mathematics KTH Royal Institute of Technology Stockholm, Sweden BFS 2012 June
Particle Metropolis-adjusted Langevin algorithms
 Particle Metropolis-adjusted Langevin algorithms Christopher Nemeth, Chris Sherlock and Paul Fearnhead arxiv:1412.7299v3 [stat.me] 27 May 2016 Department of Mathematics and Statistics, Lancaster University,
Particle Metropolis-adjusted Langevin algorithms Christopher Nemeth, Chris Sherlock and Paul Fearnhead arxiv:1412.7299v3 [stat.me] 27 May 2016 Department of Mathematics and Statistics, Lancaster University,
Sequential Monte Carlo for Bayesian Computation
 BAYESIAN STATISTICS 8, pp. 1 34. J. M. Bernardo, M. J. Bayarri, J. O. Berger, A. P. Dawid, D. Heckerman, A. F. M. Smith and M. West (Eds.) c Oxford University Press, 2007 Sequential Monte Carlo for Bayesian
BAYESIAN STATISTICS 8, pp. 1 34. J. M. Bernardo, M. J. Bayarri, J. O. Berger, A. P. Dawid, D. Heckerman, A. F. M. Smith and M. West (Eds.) c Oxford University Press, 2007 Sequential Monte Carlo for Bayesian
Nested Sequential Monte Carlo Methods
 Nested Sequential Monte Carlo Methods Christian A. Naesseth, Fredrik Lindsten, Thomas B. Schön Linköping University, Sweden The University of Cambridge, UK Uppsala University, Sweden ICML 2015 Presented
Nested Sequential Monte Carlo Methods Christian A. Naesseth, Fredrik Lindsten, Thomas B. Schön Linköping University, Sweden The University of Cambridge, UK Uppsala University, Sweden ICML 2015 Presented
Based on slides by Richard Zemel
 CSC 412/2506 Winter 2018 Probabilistic Learning and Reasoning Lecture 3: Directed Graphical Models and Latent Variables Based on slides by Richard Zemel Learning outcomes What aspects of a model can we
CSC 412/2506 Winter 2018 Probabilistic Learning and Reasoning Lecture 3: Directed Graphical Models and Latent Variables Based on slides by Richard Zemel Learning outcomes What aspects of a model can we
Negative Association, Ordering and Convergence of Resampling Methods
 Negative Association, Ordering and Convergence of Resampling Methods Nicolas Chopin ENSAE, Paristech (Joint work with Mathieu Gerber and Nick Whiteley, University of Bristol) Resampling schemes: Informal
Negative Association, Ordering and Convergence of Resampling Methods Nicolas Chopin ENSAE, Paristech (Joint work with Mathieu Gerber and Nick Whiteley, University of Bristol) Resampling schemes: Informal