Shortest Paths. CS 320, Fall Dr. Geri Georg, Instructor 320 ShortestPaths 3
|
|
|
- Erick Cooper
- 6 years ago
- Views:
Transcription

1 Shortest Paths CS 320, Fall 2017 Dr. Geri Georg, Instructor 320 ShortestPaths 3
2 Preliminaries Weighted, directed graphs Weight function: maps edges to real numbers Shortest path weight: δ(u,v) Shortest path estimate: v.d, v V Predecessor: v., v V 320 ShortestPaths 4
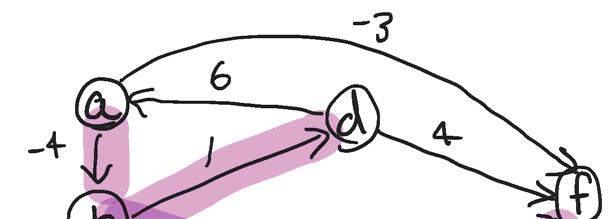
3 Negative weight edges & cycles a 3 1 b c d i h g f no negative weight cycles reachable from a means well defined δ(a,v i ) a e b c d 2 i h g f 1 3 δ(a, d) = δ(a, e) = δ(a, f) = negative weight cycles reachable from a means δ(a,v i ) NOT well defined, so δ(a,v i ) where v i = {h, g, i, c} is defined as e 320 ShortestPaths 7
4 Cycles in shortest paths? Short answer: No. Last slide showed no for a negative weight cycle. For a 0 weight cycle, we can remove the cycle and get a path with the same weight. Positive weight cycle: d 5 1 e f ShortestPaths 8
5 Shortest path properties 1 Triangle inequality: (u,v) E, δ(s, v) δ(s, u) + w(u,v) Upper bound: v V, v.d δ(s, v), and once v.d = δ(s, v) it never changes No path: If there is no path from s to v then δ(s, v) = Convergence: If s u v is a shortest path for some u, v V and if u.d = δ(s, u) at any time prior to relaxing (u,v) then u.d = δ(s, u) ever after 320 ShortestPaths 9
6 Shortest path properties 2 Path relaxation: If p = v 0,v 1, v k is a shortest path from s = v 0 to v k, and we relax the edges of p in the order (v 0, v 1 ), (v 1, v 2 ), (v k 1, v k ), then v k.d = δ(s, v k ) Predecessor subgraph: Once v.d = δ(s, v) for all v V, the predecessor subgraph is a shortest paths tree rooted at s 320 ShortestPaths 10
7 Relaxing Check to see if we can improve the shortest path to v found so far by going through u: Yes update v.d and v. No make no changes 320 ShortestPaths 11
8 Questions As we work through the Bellman Ford and Dijkstra algorithms, answer these questions: Why does Bellman Ford work with negative edges? Why doesn t Dijkstra work with negative edges? 320 ShortestPaths 12
9 Procedures INITIALIZE SINGLE SOURCE(G, s) 1 for each vertex v G.V 2 v.d = 3 v. = NIL 4 s.d = 0 RELAX(u, v, w) 1 if v.d > u.d + w(u,v) 2 v.d = u.d + w(u,v) 3 v. = u Complexity? 320 ShortestPaths 13
10 Bellman Ford BELLMAN FORD(G, w, s) 1 INITIALIZE-SINGLE-SOURCE(G, s) 2 for i = 1 to G.V for each edge (u,v) G.E 4 RELAX(u,v,w) 5 for each edge (u,v) G.E 6 if v.d > u.d + w(u,v) 7 return FALSE 8 return TRUE?? 320 ShortestPaths 14
11 Bellman Ford BELLMAN FORD(G, w, s) 1 INITIALIZE-SINGLE-SOURCE(G, s) 2 for i = 1 to G.V for each edge (u,v) G.E 4 RELAX(u,v,w) 5 for each edge (u,v) G.E 6 if v.d > u.d + w(u,v) 7 return FALSE 8 return TRUE Complexity??? 320 ShortestPaths 15
12 INITIALIZE SINGLE SOURCE(G, s) for each vertex v G.V v.d = v. = NIL s.d = 0 RELAX(u, v, w) if v.d > u.d + w(u,v) v.d = u.d + w(u,v) v. = u BELLMAN FORD(G, w, s) INITIALIZE-SINGLE-SOURCE(G, s) for i = 1 to G.V - 1 for each edge (u,v) G.E RELAX(u,v,w) for each edge (u,v) G.E if v.d > u.d + w(u,v) return FALSE return TRUE 320 ShortestPaths 17
13 320 ShortestPaths 18
14 Dijkstra s Algorithm INITIALIZE SINGLE SOURCE(G, s) S = {} MinPQ = G.V while MinPQ u = EXTRACT-MIN(MinPQ) S = S {u} for each v G.Adj[u] RELAX(u,v,w) Complexity? min PQ insert min PQ extract min PQ decrease key If min PQ is an array from 1 to V? Insert, decrease key are O(1), extract min is O(V) 320 ShortestPaths 19
15 Dijkstra s Algorithm INITIALIZE SINGLE SOURCE(G, s) S = {} MinPQ = G.V while MinPQ u = EXTRACT-MIN(MinPQ) S = S {u} for each v G.Adj[u] RELAX(u,v,w) Complexity? min PQ insert min PQ extract min PQ decrease key If min PQ is an array from 1 to V? Insert, decrease key are O(1), extract min is O(V) If min PQ is binary min heap? Build is O(V), extract min, decrease key are O(lg V) 320 ShortestPaths 20
16 Dijkstra s Algorithm INITIALIZE SINGLE SOURCE(G, s) S = {} MinPQ = G.V while MinPQ u = EXTRACT-MIN(MinPQ) S = S {u} for each v G.Adj[u] RELAX(u,v,w) Complexity? min PQ insert min PQ extract min PQ decrease key If min PQ is an array from 1 to V? Insert, decrease key are O(1), extract min is O(V) If min PQ is binary min heap? Build is O(V), extract min, decrease key are O(lg V) If min PQ is a Fibonacci min heap? V extract min ops of O(lg V), E decrease key is O(1) 320 ShortestPaths 21
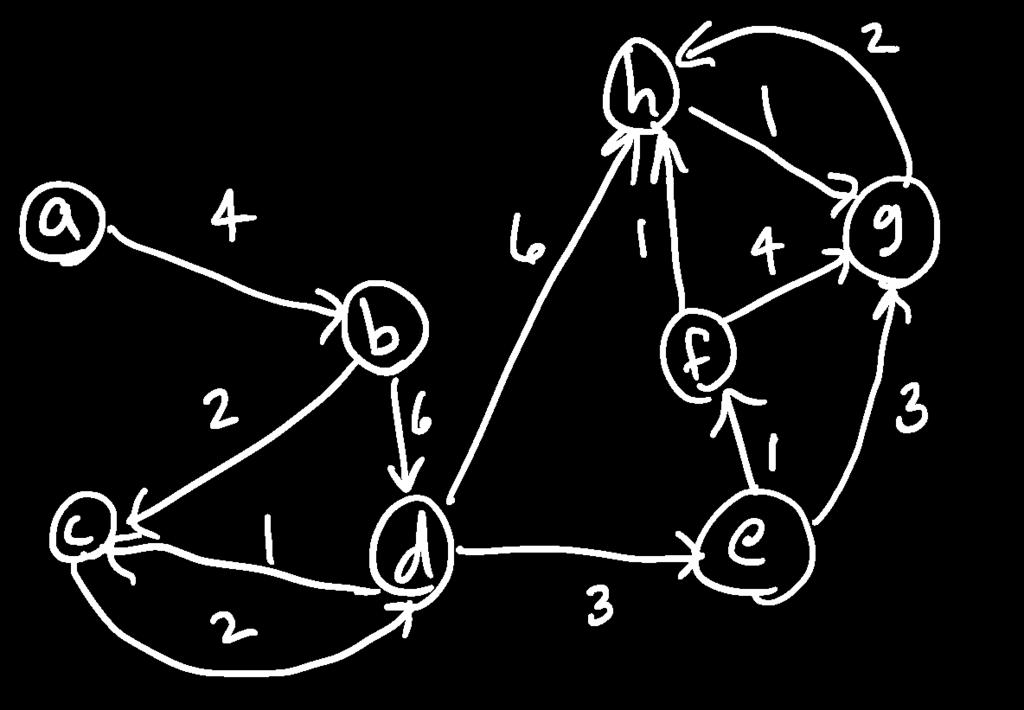
17 INITIALIZE SINGLE SOURCE(G, s) for each vertex v G.V v.d = v. = NIL s.d = 0 RELAX(u, v, w) if v.d > u.d + w(u,v) v.d = u.d + w(u,v) v. = u DIJKSTRA(G, w, s) INITIALIZE SINGLE SOURCE(G, s) S = {} MinPQ = G.V while MinPQ u = EXTRACT-MIN(MinPQ) S = S {u} for each v G.Adj[u] RELAX(u,v,w) c a b causes re build Dijkstra s 6 d 6 h 3 1 f g e ShortestPaths 22
18 320 ShortestPaths 23
19 Difference Constraints Special case of linear programming Search for a feasible solution to Ax b Value in each node is δ(v 0, v i ) which is a feasible solution for x 320 ShortestPaths 24
20 320 ShortestPaths 25
21 Micro Survey 1 Can you just add to negative weight edges to make them have weights 0 so that Dijkstra s algorithm will work? If we add the absolute value of the largest negative weight (call it x) to each edge to get rid of negative weight, this won t work unless all shortest paths have the same length. As an example, look at a shortest path of 2 edges, then the total path length will be increased by 2x. But if we have another shortest path of 3 edges, then that total path length will be increased by 3x. In addition, if a longer path originally has a smaller weight, you can switch which path has the smaller weight: Consider a graph where there are 2 paths between 2 nodes, a direct edge of length 2, and an indirect route through 2 other nodes with lengths 1, 2, and 2. The second path is shorter. Now say you increase all edge weights by 2, so the direct path is now length 4, and the indirect path is length 6. The direct path is shorter now. 320 AllPairsShortestPaths 27
22 Micro Survey 2 What s the w in Dijkstra s algorithm? It s a function that returns the weight of the edge indicated by its arguments. What s the goal for difference constraints? To find a feasible solution for the x vector, or return false if there is no feasible solution. Recall the equation is: Ax b where A is a matrix and x and b are vectors. With the Bellman Ford algorithm, do we call edges on a negative cycle? No matter how many times we loop will the value ever change? What happens is that we use the edge values we have, and we go through, checking all the edges for V 1 times. Then we check one more time, and we find an instance of v.d > u.d + w(u,v) so we know there s a negative cycle. 320 AllPairsShortestPaths 28
23 Micro Survey 3 Is it true that difference constraints only work for matrices that reduce to each row containing a 1 and a 1? What really happens is that a real problem can directly be stated as a set of difference constraints. What real problems exist for difference constraints? Consider a VLSI layout problem. Constrain it to horizontal layout of a bunch of features and you measure them all from the left edge. You have to have some specified distance between them, maybe so that there s room for routing lines. In that case you can talk about the difference in the horizontal distance of the left edges for each pair of features. This yields difference constraints. And the minimum path will make for a smaller chip. Plus this algorithm tells you if there is no feasible solution to the constraints. 320 AllPairsShortestPaths 29
24 320 ShortestPaths 30
25 Image Credits seattlespt.png: critical path trainset.jpg, trainset.jpg: to calculate critical path float and early and late startsand finishes/ 320 ShortestPaths 32
Analysis of Algorithms. Outline. Single Source Shortest Path. Andres Mendez-Vazquez. November 9, Notes. Notes
 Analysis of Algorithms Single Source Shortest Path Andres Mendez-Vazquez November 9, 01 1 / 108 Outline 1 Introduction Introduction and Similar Problems General Results Optimal Substructure Properties
Analysis of Algorithms Single Source Shortest Path Andres Mendez-Vazquez November 9, 01 1 / 108 Outline 1 Introduction Introduction and Similar Problems General Results Optimal Substructure Properties
Slides credited from Hsueh-I Lu & Hsu-Chun Hsiao
 Slides credited from Hsueh-I Lu & Hsu-Chun Hsiao Homework 3 released Due on 12/13 (Thur) 14:20 (one week only) Mini-HW 9 released Due on 12/13 (Thur) 14:20 Homework 4 released Due on 1/3 (Thur) 14:20 (four
Slides credited from Hsueh-I Lu & Hsu-Chun Hsiao Homework 3 released Due on 12/13 (Thur) 14:20 (one week only) Mini-HW 9 released Due on 12/13 (Thur) 14:20 Homework 4 released Due on 1/3 (Thur) 14:20 (four
CS 4407 Algorithms Lecture: Shortest Path Algorithms
 CS 440 Algorithms Lecture: Shortest Path Algorithms Prof. Gregory Provan Department of Computer Science University College Cork 1 Outline Shortest Path Problem General Lemmas and Theorems. Algorithms Bellman-Ford
CS 440 Algorithms Lecture: Shortest Path Algorithms Prof. Gregory Provan Department of Computer Science University College Cork 1 Outline Shortest Path Problem General Lemmas and Theorems. Algorithms Bellman-Ford
Design and Analysis of Algorithms
 Design and Analysis of Algorithms CSE 5311 Lecture 21 Single-Source Shortest Paths Junzhou Huang, Ph.D. Department of Computer Science and Engineering CSE5311 Design and Analysis of Algorithms 1 Single-Source
Design and Analysis of Algorithms CSE 5311 Lecture 21 Single-Source Shortest Paths Junzhou Huang, Ph.D. Department of Computer Science and Engineering CSE5311 Design and Analysis of Algorithms 1 Single-Source
Lecture 11. Single-Source Shortest Paths All-Pairs Shortest Paths
 Lecture. Single-Source Shortest Paths All-Pairs Shortest Paths T. H. Cormen, C. E. Leiserson and R. L. Rivest Introduction to, rd Edition, MIT Press, 009 Sungkyunkwan University Hyunseung Choo choo@skku.edu
Lecture. Single-Source Shortest Paths All-Pairs Shortest Paths T. H. Cormen, C. E. Leiserson and R. L. Rivest Introduction to, rd Edition, MIT Press, 009 Sungkyunkwan University Hyunseung Choo choo@skku.edu
CS 253: Algorithms. Chapter 24. Shortest Paths. Credit: Dr. George Bebis
 CS : Algorithms Chapter 4 Shortest Paths Credit: Dr. George Bebis Shortest Path Problems How can we find the shortest route between two points on a road map? Model the problem as a graph problem: Road
CS : Algorithms Chapter 4 Shortest Paths Credit: Dr. George Bebis Shortest Path Problems How can we find the shortest route between two points on a road map? Model the problem as a graph problem: Road
Design and Analysis of Algorithms
 Design and Analysis of Algorithms CSE 5311 Lecture 22 All-Pairs Shortest Paths Junzhou Huang, Ph.D. Department of Computer Science and Engineering CSE5311 Design and Analysis of Algorithms 1 All Pairs
Design and Analysis of Algorithms CSE 5311 Lecture 22 All-Pairs Shortest Paths Junzhou Huang, Ph.D. Department of Computer Science and Engineering CSE5311 Design and Analysis of Algorithms 1 All Pairs
Introduction to Algorithms
 Introduction to Algorithms, Lecture 5 // Introduction to Algorithms 6.46J/.4J LECTURE Shortest Paths I Properties o shortest paths Dijkstra s Correctness Analysis Breadth-irst Pro. Manolis Kellis March,
Introduction to Algorithms, Lecture 5 // Introduction to Algorithms 6.46J/.4J LECTURE Shortest Paths I Properties o shortest paths Dijkstra s Correctness Analysis Breadth-irst Pro. Manolis Kellis March,
Lecture Notes for Chapter 25: All-Pairs Shortest Paths
 Lecture Notes for Chapter 25: All-Pairs Shortest Paths Chapter 25 overview Given a directed graph G (V, E), weight function w : E R, V n. Goal: create an n n matrix of shortest-path distances δ(u,v). Could
Lecture Notes for Chapter 25: All-Pairs Shortest Paths Chapter 25 overview Given a directed graph G (V, E), weight function w : E R, V n. Goal: create an n n matrix of shortest-path distances δ(u,v). Could
CMPS 2200 Fall Carola Wenk Slides courtesy of Charles Leiserson with small changes by Carola Wenk. 10/8/12 CMPS 2200 Intro.
 CMPS 00 Fall 01 Single Source Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with small changes by Carola Wenk 1 Paths in graphs Consider a digraph G = (V, E) with edge-weight function
CMPS 00 Fall 01 Single Source Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with small changes by Carola Wenk 1 Paths in graphs Consider a digraph G = (V, E) with edge-weight function
Examination paper for TDT4120 Algorithms and Data Structures
 Examination paper for TDT4120 Algorithms and Data Structures Academic contact during examination Magnus Lie Hetland Phone 91851949 Examination date December 7, 2013 Examination time (from to) 0900 1300
Examination paper for TDT4120 Algorithms and Data Structures Academic contact during examination Magnus Lie Hetland Phone 91851949 Examination date December 7, 2013 Examination time (from to) 0900 1300
Introduction to Algorithms
 Introduction to Algorithms 6.046J/18.401J/SMA5503 Lecture 18 Prof. Erik Demaine Negative-weight cycles Recall: If a graph G = (V, E) contains a negativeweight cycle, then some shortest paths may not exist.
Introduction to Algorithms 6.046J/18.401J/SMA5503 Lecture 18 Prof. Erik Demaine Negative-weight cycles Recall: If a graph G = (V, E) contains a negativeweight cycle, then some shortest paths may not exist.
Introduction to Algorithms
 Introduction to Algorithms 6.046J/18.401J LECTURE 14 Shortest Paths I Properties of shortest paths Dijkstra s algorithm Correctness Analysis Breadth-first search Prof. Charles E. Leiserson Paths in graphs
Introduction to Algorithms 6.046J/18.401J LECTURE 14 Shortest Paths I Properties of shortest paths Dijkstra s algorithm Correctness Analysis Breadth-first search Prof. Charles E. Leiserson Paths in graphs
Introduction to Algorithms
 Introduction to Algorithms 6.046J/8.40J/SMA550 Lecture 7 Prof. Erik Demaine Paths in graphs Consider a digraph G = (V, E) with edge-weight function w : E R. The weight of path p = v v L v k is defined
Introduction to Algorithms 6.046J/8.40J/SMA550 Lecture 7 Prof. Erik Demaine Paths in graphs Consider a digraph G = (V, E) with edge-weight function w : E R. The weight of path p = v v L v k is defined
Algorithms Booklet. 1 Graph Searching. 1.1 Breadth First Search
 Algorithms Booklet 2010 Note: in all algorithms, unless stated otherwise, the input graph G is represented by adjacency lists. 1 Graph Searching 1.1 Breadth First Search Algorithm 1: BFS(G, s) Input: G
Algorithms Booklet 2010 Note: in all algorithms, unless stated otherwise, the input graph G is represented by adjacency lists. 1 Graph Searching 1.1 Breadth First Search Algorithm 1: BFS(G, s) Input: G
Shortest Path Algorithms
 Shortest Path Algorithms Andreas Klappenecker [based on slides by Prof. Welch] 1 Single Source Shortest Path 2 Single Source Shortest Path Given: a directed or undirected graph G = (V,E) a source node
Shortest Path Algorithms Andreas Klappenecker [based on slides by Prof. Welch] 1 Single Source Shortest Path 2 Single Source Shortest Path Given: a directed or undirected graph G = (V,E) a source node
Introduction to Algorithms
 Introduction to Algorithms 6.046J/18.401J LECTURE 17 Shortest Paths I Properties of shortest paths Dijkstra s algorithm Correctness Analysis Breadth-first search Prof. Erik Demaine November 14, 005 Copyright
Introduction to Algorithms 6.046J/18.401J LECTURE 17 Shortest Paths I Properties of shortest paths Dijkstra s algorithm Correctness Analysis Breadth-first search Prof. Erik Demaine November 14, 005 Copyright
CS 6301 PROGRAMMING AND DATA STRUCTURE II Dept of CSE/IT UNIT V GRAPHS
 UNIT V GRAPHS Representation of Graphs Breadth-first search Depth-first search Topological sort Minimum Spanning Trees Kruskal and Prim algorithm Shortest path algorithm Dijkstra s algorithm Bellman-Ford
UNIT V GRAPHS Representation of Graphs Breadth-first search Depth-first search Topological sort Minimum Spanning Trees Kruskal and Prim algorithm Shortest path algorithm Dijkstra s algorithm Bellman-Ford
CMPS 6610 Fall 2018 Shortest Paths Carola Wenk
 CMPS 6610 Fall 018 Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with changes and additions by Carola Wenk Paths in graphs Consider a digraph G = (V, E) with an edge-weight function w
CMPS 6610 Fall 018 Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with changes and additions by Carola Wenk Paths in graphs Consider a digraph G = (V, E) with an edge-weight function w
Single Source Shortest Paths
 CMPS 00 Fall 017 Single Source Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with changes and additions by Carola Wenk Paths in graphs Consider a digraph G = (V, E) with an edge-weight
CMPS 00 Fall 017 Single Source Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with changes and additions by Carola Wenk Paths in graphs Consider a digraph G = (V, E) with an edge-weight
Chapter 4. Greedy Algorithms. Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved.
 Chapter 4 Greedy Algorithms Slides by Kevin Wayne. Copyright Pearson-Addison Wesley. All rights reserved. 4 4.1 Interval Scheduling Interval Scheduling Interval scheduling. Job j starts at s j and finishes
Chapter 4 Greedy Algorithms Slides by Kevin Wayne. Copyright Pearson-Addison Wesley. All rights reserved. 4 4.1 Interval Scheduling Interval Scheduling Interval scheduling. Job j starts at s j and finishes
CS60020: Foundations of Algorithm Design and Machine Learning. Sourangshu Bhattacharya
 CS6000: Foundations of Algorithm Design and Machine Learning Sourangshu Bhattacharya Paths in graphs Consider a digraph G = (V, E) with edge-weight function w : E R. The weight of path p = v 1 v L v k
CS6000: Foundations of Algorithm Design and Machine Learning Sourangshu Bhattacharya Paths in graphs Consider a digraph G = (V, E) with edge-weight function w : E R. The weight of path p = v 1 v L v k
Single Source Shortest Paths
 CMPS 00 Fall 015 Single Source Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with changes and additions by Carola Wenk 1 Paths in graphs Consider a digraph G = (V, E) with an edge-weight
CMPS 00 Fall 015 Single Source Shortest Paths Carola Wenk Slides courtesy of Charles Leiserson with changes and additions by Carola Wenk 1 Paths in graphs Consider a digraph G = (V, E) with an edge-weight
Dijkstra s Single Source Shortest Path Algorithm. Andreas Klappenecker
 Dijkstra s Single Source Shortest Path Algorithm Andreas Klappenecker Single Source Shortest Path Given: a directed or undirected graph G = (V,E) a source node s in V a weight function w: E -> R. Goal:
Dijkstra s Single Source Shortest Path Algorithm Andreas Klappenecker Single Source Shortest Path Given: a directed or undirected graph G = (V,E) a source node s in V a weight function w: E -> R. Goal:
BFS Dijkstra. Oct abhi shelat
 4102 BFS Dijkstra Oct 22 2009 abhi shelat breadth first search bfs(g, a) 1 2 a b 1 2 d c e f g 2 h bfs theorem Theorem 1 (CLRS, p. 599) Let G =(V, E) be a graph and suppose that BFS is run on G from vertex
4102 BFS Dijkstra Oct 22 2009 abhi shelat breadth first search bfs(g, a) 1 2 a b 1 2 d c e f g 2 h bfs theorem Theorem 1 (CLRS, p. 599) Let G =(V, E) be a graph and suppose that BFS is run on G from vertex
A faster algorithm for the single source shortest path problem with few distinct positive lengths
 A faster algorithm for the single source shortest path problem with few distinct positive lengths J. B. Orlin, K. Madduri, K. Subramani, and M. Williamson Journal of Discrete Algorithms 8 (2010) 189 198.
A faster algorithm for the single source shortest path problem with few distinct positive lengths J. B. Orlin, K. Madduri, K. Subramani, and M. Williamson Journal of Discrete Algorithms 8 (2010) 189 198.
Chapter 4. Greedy Algorithms. Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved.
 Chapter 4 Greedy Algorithms Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved. 1 4.1 Interval Scheduling Interval Scheduling Interval scheduling. Job j starts at s j and
Chapter 4 Greedy Algorithms Slides by Kevin Wayne. Copyright 2005 Pearson-Addison Wesley. All rights reserved. 1 4.1 Interval Scheduling Interval Scheduling Interval scheduling. Job j starts at s j and
Myriad of applications
 Shortet Path Myriad of application Finding hortet ditance between location (Google map, etc.) Internet router protocol: OSPF (Open Shortet Path Firt) i ued to find the hortet path to interchange package
Shortet Path Myriad of application Finding hortet ditance between location (Google map, etc.) Internet router protocol: OSPF (Open Shortet Path Firt) i ued to find the hortet path to interchange package
CSE 431/531: Analysis of Algorithms. Dynamic Programming. Lecturer: Shi Li. Department of Computer Science and Engineering University at Buffalo
 CSE 431/531: Analysis of Algorithms Dynamic Programming Lecturer: Shi Li Department of Computer Science and Engineering University at Buffalo Paradigms for Designing Algorithms Greedy algorithm Make a
CSE 431/531: Analysis of Algorithms Dynamic Programming Lecturer: Shi Li Department of Computer Science and Engineering University at Buffalo Paradigms for Designing Algorithms Greedy algorithm Make a
CS 241 Analysis of Algorithms
 CS 241 Analysis of Algorithms Professor Eric Aaron Lecture T Th 9:00am Lecture Meeting Location: OLB 205 Business Grading updates: HW5 back today HW7 due Dec. 10 Reading: Ch. 22.1-22.3, Ch. 25.1-2, Ch.
CS 241 Analysis of Algorithms Professor Eric Aaron Lecture T Th 9:00am Lecture Meeting Location: OLB 205 Business Grading updates: HW5 back today HW7 due Dec. 10 Reading: Ch. 22.1-22.3, Ch. 25.1-2, Ch.
CS675: Convex and Combinatorial Optimization Fall 2016 Combinatorial Problems as Linear and Convex Programs. Instructor: Shaddin Dughmi
 CS675: Convex and Combinatorial Optimization Fall 2016 Combinatorial Problems as Linear and Convex Programs Instructor: Shaddin Dughmi Outline 1 Introduction 2 Shortest Path 3 Algorithms for Single-Source
CS675: Convex and Combinatorial Optimization Fall 2016 Combinatorial Problems as Linear and Convex Programs Instructor: Shaddin Dughmi Outline 1 Introduction 2 Shortest Path 3 Algorithms for Single-Source
CS675: Convex and Combinatorial Optimization Fall 2014 Combinatorial Problems as Linear Programs. Instructor: Shaddin Dughmi
 CS675: Convex and Combinatorial Optimization Fall 2014 Combinatorial Problems as Linear Programs Instructor: Shaddin Dughmi Outline 1 Introduction 2 Shortest Path 3 Algorithms for Single-Source Shortest
CS675: Convex and Combinatorial Optimization Fall 2014 Combinatorial Problems as Linear Programs Instructor: Shaddin Dughmi Outline 1 Introduction 2 Shortest Path 3 Algorithms for Single-Source Shortest
Query Processing in Spatial Network Databases
 Temporal and Spatial Data Management Fall 0 Query Processing in Spatial Network Databases SL06 Spatial network databases Shortest Path Incremental Euclidean Restriction Incremental Network Expansion Spatial
Temporal and Spatial Data Management Fall 0 Query Processing in Spatial Network Databases SL06 Spatial network databases Shortest Path Incremental Euclidean Restriction Incremental Network Expansion Spatial
1. (7pts) Find the points of intersection, if any, of the following planes. 3x + 9y + 6z = 3 2x 6y 4z = 2 x + 3y + 2z = 1
 Find the points of intersection, if any, of the following planes. 3x + 9y + 6z = 3 2x 6y 4z = 2 x + 3y + 2z = 1") Math 125 Exam 1 Version 1 February 20, 2006 1. (a) (7pts) Find the points of intersection, if any, of the following planes. Solution: augmented R 1 R 3 3x + 9y + 6z = 3 2x 6y 4z = 2 x + 3y + 2z = 1 3 9
Math 125 Exam 1 Version 1 February 20, 2006 1. (a) (7pts) Find the points of intersection, if any, of the following planes. Solution: augmented R 1 R 3 3x + 9y + 6z = 3 2x 6y 4z = 2 x + 3y + 2z = 1 3 9
Shortest paths with negative lengths
 Chapter 8 Shortest paths with negative lengths In this chapter we give a linear-space, nearly linear-time algorithm that, given a directed planar graph G with real positive and negative lengths, but no
Chapter 8 Shortest paths with negative lengths In this chapter we give a linear-space, nearly linear-time algorithm that, given a directed planar graph G with real positive and negative lengths, but no
Algorithm Design and Analysis
 Algorithm Design and Analysis LECTURE 7 Greedy Graph Algorithms Shortest paths Minimum Spanning Tree Sofya Raskhodnikova 9/14/016 S. Raskhodnikova; based on slides by E. Demaine, C. Leiserson, A. Smith,
Algorithm Design and Analysis LECTURE 7 Greedy Graph Algorithms Shortest paths Minimum Spanning Tree Sofya Raskhodnikova 9/14/016 S. Raskhodnikova; based on slides by E. Demaine, C. Leiserson, A. Smith,
University of Toronto Department of Electrical and Computer Engineering. Final Examination. ECE 345 Algorithms and Data Structures Fall 2016
 University of Toronto Department of Electrical and Computer Engineering Final Examination ECE 345 Algorithms and Data Structures Fall 2016 Print your first name, last name, UTORid, and student number neatly
University of Toronto Department of Electrical and Computer Engineering Final Examination ECE 345 Algorithms and Data Structures Fall 2016 Print your first name, last name, UTORid, and student number neatly
Dynamic Programming: Shortest Paths and DFA to Reg Exps
 CS 374: Algorithms & Models of Computation, Spring 207 Dynamic Programming: Shortest Paths and DFA to Reg Exps Lecture 8 March 28, 207 Chandra Chekuri (UIUC) CS374 Spring 207 / 56 Part I Shortest Paths
CS 374: Algorithms & Models of Computation, Spring 207 Dynamic Programming: Shortest Paths and DFA to Reg Exps Lecture 8 March 28, 207 Chandra Chekuri (UIUC) CS374 Spring 207 / 56 Part I Shortest Paths
Lecture 7: Shortest Paths in Graphs with Negative Arc Lengths. Reading: AM&O Chapter 5
 Lecture 7: Shortest Paths in Graphs with Negative Arc Lengths Reading: AM&O Chapter Label Correcting Methods Assume the network G is allowed to have negative arc lengths but no directed negativelyweighted
Lecture 7: Shortest Paths in Graphs with Negative Arc Lengths Reading: AM&O Chapter Label Correcting Methods Assume the network G is allowed to have negative arc lengths but no directed negativelyweighted
Discrete Wiskunde II. Lecture 5: Shortest Paths & Spanning Trees
 , 2009 Lecture 5: Shortest Paths & Spanning Trees University of Twente m.uetz@utwente.nl wwwhome.math.utwente.nl/~uetzm/dw/ Shortest Path Problem "#$%&'%()*%"()$#+,&- Given directed "#$%&'()*+,%+('-*.#/'01234564'.*,'7+"-%/8',&'5"4'84%#3
, 2009 Lecture 5: Shortest Paths & Spanning Trees University of Twente m.uetz@utwente.nl wwwhome.math.utwente.nl/~uetzm/dw/ Shortest Path Problem "#$%&'%()*%"()$#+,&- Given directed "#$%&'()*+,%+('-*.#/'01234564'.*,'7+"-%/8',&'5"4'84%#3
Data Structures and and Algorithm Xiaoqing Zheng
 Data Structures and Algorithm Xiaoqing Zheng zhengxq@fudan.edu.cn Representations of undirected graph 1 2 1 2 5 / 5 4 3 2 3 4 5 1 3 4 / 2 4 / 2 5 3 / 4 1 / Adjacency-list representation of graph G = (V,
Data Structures and Algorithm Xiaoqing Zheng zhengxq@fudan.edu.cn Representations of undirected graph 1 2 1 2 5 / 5 4 3 2 3 4 5 1 3 4 / 2 4 / 2 5 3 / 4 1 / Adjacency-list representation of graph G = (V,
Dynamic Programming: Shortest Paths and DFA to Reg Exps
 CS 374: Algorithms & Models of Computation, Fall 205 Dynamic Programming: Shortest Paths and DFA to Reg Exps Lecture 7 October 22, 205 Chandra & Manoj (UIUC) CS374 Fall 205 / 54 Part I Shortest Paths with
CS 374: Algorithms & Models of Computation, Fall 205 Dynamic Programming: Shortest Paths and DFA to Reg Exps Lecture 7 October 22, 205 Chandra & Manoj (UIUC) CS374 Fall 205 / 54 Part I Shortest Paths with
Discrete Optimization 2010 Lecture 8 Lagrangian Relaxation / P, N P and co-n P
 Discrete Optimization 2010 Lecture 8 Lagrangian Relaxation / P, N P and co-n P Marc Uetz University of Twente m.uetz@utwente.nl Lecture 8: sheet 1 / 32 Marc Uetz Discrete Optimization Outline 1 Lagrangian
Discrete Optimization 2010 Lecture 8 Lagrangian Relaxation / P, N P and co-n P Marc Uetz University of Twente m.uetz@utwente.nl Lecture 8: sheet 1 / 32 Marc Uetz Discrete Optimization Outline 1 Lagrangian
ne a priority queue for the nodes of G; ile (! PQ.is empty( )) select u PQ with d(u) minimal and remove it; I Informatik 1 Kurt Mehlhorn
) select u PQ with d(u) minimal and remove it; I Informatik 1 Kurt Mehlhorn") n-negative Edge Costs: optimal choice: u U with d(u) minimal. e use a priority queue (de nition on next slide) PQ to maintain the set of pairs, d(u)) ; u U } and obtain Dijkstra s Algorithm: ne a priority
n-negative Edge Costs: optimal choice: u U with d(u) minimal. e use a priority queue (de nition on next slide) PQ to maintain the set of pairs, d(u)) ; u U } and obtain Dijkstra s Algorithm: ne a priority
7.4 DO (uniqueness of minimum-cost spanning tree) Prove: if all edge weights are distinct then the minimum-cost spanning tree is unique.
 Prove: if all edge weights are distinct then the minimum-cost spanning tree is unique.") Algorithms CMSC-700 http://alg1.cs.uchicago.edu Homework set #7. Posted -19. Due Wednesday, February, 01 The following problems were updated on -0: 7.1(a), 7.1(b), 7.9(b) Read the homework instructions
Algorithms CMSC-700 http://alg1.cs.uchicago.edu Homework set #7. Posted -19. Due Wednesday, February, 01 The following problems were updated on -0: 7.1(a), 7.1(b), 7.9(b) Read the homework instructions
CSE 421 Introduction to Algorithms Final Exam Winter 2005
 NAME: CSE 421 Introduction to Algorithms Final Exam Winter 2005 P. Beame 14 March 2005 DIRECTIONS: Answer the problems on the exam paper. Open book. Open notes. If you need extra space use the back of
NAME: CSE 421 Introduction to Algorithms Final Exam Winter 2005 P. Beame 14 March 2005 DIRECTIONS: Answer the problems on the exam paper. Open book. Open notes. If you need extra space use the back of
CS 320, Fall Dr. Geri Georg, Instructor 320 NP 1
 NP CS 320, Fall 2017 Dr. Geri Georg, Instructor georg@colostate.edu 320 NP 1 NP Complete A class of problems where: No polynomial time algorithm has been discovered No proof that one doesn t exist 320
NP CS 320, Fall 2017 Dr. Geri Georg, Instructor georg@colostate.edu 320 NP 1 NP Complete A class of problems where: No polynomial time algorithm has been discovered No proof that one doesn t exist 320
Midterm Exam 2 Solutions
 Algorithm Design and Analysis November 12, 2010 Pennsylvania State University CSE 565, Fall 2010 Professor Adam Smith Exam 2 Solutions Problem 1 (Miscellaneous). Midterm Exam 2 Solutions (a) Your friend
Algorithm Design and Analysis November 12, 2010 Pennsylvania State University CSE 565, Fall 2010 Professor Adam Smith Exam 2 Solutions Problem 1 (Miscellaneous). Midterm Exam 2 Solutions (a) Your friend
Decision Mathematics D1 Advanced/Advanced Subsidiary. Tuesday 9 June 2015 Morning Time: 1 hour 30 minutes
 Paper Reference(s) 6689/01 Edexcel GCE Decision Mathematics D1 Advanced/Advanced Subsidiary Tuesday 9 June 2015 Morning Time: 1 hour 30 minutes Materials required for examination Nil Items included with
Paper Reference(s) 6689/01 Edexcel GCE Decision Mathematics D1 Advanced/Advanced Subsidiary Tuesday 9 June 2015 Morning Time: 1 hour 30 minutes Materials required for examination Nil Items included with
CS781 Lecture 3 January 27, 2011
 CS781 Lecture 3 January 7, 011 Greedy Algorithms Topics: Interval Scheduling and Partitioning Dijkstra s Shortest Path Algorithm Minimum Spanning Trees Single-Link k-clustering Interval Scheduling Interval
CS781 Lecture 3 January 7, 011 Greedy Algorithms Topics: Interval Scheduling and Partitioning Dijkstra s Shortest Path Algorithm Minimum Spanning Trees Single-Link k-clustering Interval Scheduling Interval
Discrete Optimization 2010 Lecture 2 Matroids & Shortest Paths
 Matroids Shortest Paths Discrete Optimization 2010 Lecture 2 Matroids & Shortest Paths Marc Uetz University of Twente m.uetz@utwente.nl Lecture 2: sheet 1 / 25 Marc Uetz Discrete Optimization Matroids
Matroids Shortest Paths Discrete Optimization 2010 Lecture 2 Matroids & Shortest Paths Marc Uetz University of Twente m.uetz@utwente.nl Lecture 2: sheet 1 / 25 Marc Uetz Discrete Optimization Matroids
Decision Mathematics D1 Advanced/Advanced Subsidiary. Wednesday 23 January 2013 Morning Time: 1 hour 30 minutes
 Paper Reference(s) 6689/01 Edexcel GCE Decision Mathematics D1 Advanced/Advanced Subsidiary Wednesday 23 January 2013 Morning Time: 1 hour 30 minutes Materials required for examination Nil Items included
Paper Reference(s) 6689/01 Edexcel GCE Decision Mathematics D1 Advanced/Advanced Subsidiary Wednesday 23 January 2013 Morning Time: 1 hour 30 minutes Materials required for examination Nil Items included
Dynamic Programming. Data Structures and Algorithms Andrei Bulatov
 Dynamic Programming Data Structures and Algorithms Andrei Bulatov Algorithms Dynamic Programming 18-2 Weighted Interval Scheduling Weighted interval scheduling problem. Instance A set of n jobs. Job j
Dynamic Programming Data Structures and Algorithms Andrei Bulatov Algorithms Dynamic Programming 18-2 Weighted Interval Scheduling Weighted interval scheduling problem. Instance A set of n jobs. Job j
University of New Mexico Department of Computer Science. Final Examination. CS 561 Data Structures and Algorithms Fall, 2006
 University of New Mexico Department of Computer Science Final Examination CS 561 Data Structures and Algorithms Fall, 2006 Name: Email: Print your name and email, neatly in the space provided above; print
University of New Mexico Department of Computer Science Final Examination CS 561 Data Structures and Algorithms Fall, 2006 Name: Email: Print your name and email, neatly in the space provided above; print
Problem set 1. (c) Is the Ford-Fulkerson algorithm guaranteed to produce an acyclic maximum flow?
 Is the Ford-Fulkerson algorithm guaranteed to produce an acyclic maximum flow?") CS261, Winter 2017. Instructor: Ashish Goel. Problem set 1 Electronic submission to Gradescope due 11:59pm Thursday 2/2. Form a group of 2-3 students that is, submit one homework with all of your names.
CS261, Winter 2017. Instructor: Ashish Goel. Problem set 1 Electronic submission to Gradescope due 11:59pm Thursday 2/2. Form a group of 2-3 students that is, submit one homework with all of your names.
Partha Sarathi Mandal
 MA 252: Data Structures and Algorithms Lecture 32 http://www.iitg.ernet.in/psm/indexing_ma252/y12/index.html Partha Sarathi Mandal Dept. of Mathematics, IIT Guwahati The All-Pairs Shortest Paths Problem
MA 252: Data Structures and Algorithms Lecture 32 http://www.iitg.ernet.in/psm/indexing_ma252/y12/index.html Partha Sarathi Mandal Dept. of Mathematics, IIT Guwahati The All-Pairs Shortest Paths Problem
Flows. Chapter Circulations
 Chapter 4 Flows For a directed graph D = (V,A), we define δ + (U) := {(u,v) A : u U,v / U} as the arcs leaving U and δ (U) := {(u,v) A u / U,v U} as the arcs entering U. 4. Circulations In a directed graph
Chapter 4 Flows For a directed graph D = (V,A), we define δ + (U) := {(u,v) A : u U,v / U} as the arcs leaving U and δ (U) := {(u,v) A u / U,v U} as the arcs entering U. 4. Circulations In a directed graph
Contents Lecture 4. Greedy graph algorithms Dijkstra s algorithm Prim s algorithm Kruskal s algorithm Union-find data structure with path compression
 Contents Lecture 4 Greedy graph algorithms Dijkstra s algorithm Prim s algorithm Kruskal s algorithm Union-find data structure with path compression Jonas Skeppstedt (jonasskeppstedt.net) Lecture 4 2018
Contents Lecture 4 Greedy graph algorithms Dijkstra s algorithm Prim s algorithm Kruskal s algorithm Union-find data structure with path compression Jonas Skeppstedt (jonasskeppstedt.net) Lecture 4 2018
Optimization Prof. A. Goswami Department of Mathematics Indian Institute of Technology, Kharagpur. Lecture - 20 Travelling Salesman Problem
 Optimization Prof. A. Goswami Department of Mathematics Indian Institute of Technology, Kharagpur Lecture - 20 Travelling Salesman Problem Today we are going to discuss the travelling salesman problem.
Optimization Prof. A. Goswami Department of Mathematics Indian Institute of Technology, Kharagpur Lecture - 20 Travelling Salesman Problem Today we are going to discuss the travelling salesman problem.
9.5. Polynomial and Rational Inequalities. Objectives. Solve quadratic inequalities. Solve polynomial inequalities of degree 3 or greater.
 Chapter 9 Section 5 9.5 Polynomial and Rational Inequalities Objectives 1 3 Solve quadratic inequalities. Solve polynomial inequalities of degree 3 or greater. Solve rational inequalities. Objective 1
Chapter 9 Section 5 9.5 Polynomial and Rational Inequalities Objectives 1 3 Solve quadratic inequalities. Solve polynomial inequalities of degree 3 or greater. Solve rational inequalities. Objective 1
NP-completeness. Chapter 34. Sergey Bereg
 NP-completeness Chapter 34 Sergey Bereg Oct 2017 Examples Some problems admit polynomial time algorithms, i.e. O(n k ) running time where n is the input size. We will study a class of NP-complete problems
NP-completeness Chapter 34 Sergey Bereg Oct 2017 Examples Some problems admit polynomial time algorithms, i.e. O(n k ) running time where n is the input size. We will study a class of NP-complete problems
Combinatorial Optimization
 Combinatorial Optimization 2017-2018 1 Maximum matching on bipartite graphs Given a graph G = (V, E), find a maximum cardinal matching. 1.1 Direct algorithms Theorem 1.1 (Petersen, 1891) A matching M is
Combinatorial Optimization 2017-2018 1 Maximum matching on bipartite graphs Given a graph G = (V, E), find a maximum cardinal matching. 1.1 Direct algorithms Theorem 1.1 (Petersen, 1891) A matching M is
25. Minimum Spanning Trees
 695 25. Minimum Spanning Trees Motivation, Greedy, Algorithm Kruskal, General Rules, ADT Union-Find, Algorithm Jarnik, Prim, Dijkstra, Fibonacci Heaps [Ottman/Widmayer, Kap. 9.6, 6.2, 6.1, Cormen et al,
695 25. Minimum Spanning Trees Motivation, Greedy, Algorithm Kruskal, General Rules, ADT Union-Find, Algorithm Jarnik, Prim, Dijkstra, Fibonacci Heaps [Ottman/Widmayer, Kap. 9.6, 6.2, 6.1, Cormen et al,
25. Minimum Spanning Trees
 Problem Given: Undirected, weighted, connected graph G = (V, E, c). 5. Minimum Spanning Trees Motivation, Greedy, Algorithm Kruskal, General Rules, ADT Union-Find, Algorithm Jarnik, Prim, Dijkstra, Fibonacci
Problem Given: Undirected, weighted, connected graph G = (V, E, c). 5. Minimum Spanning Trees Motivation, Greedy, Algorithm Kruskal, General Rules, ADT Union-Find, Algorithm Jarnik, Prim, Dijkstra, Fibonacci
Progress on Parallel Chip-Firing
 Progress on Parallel Chip-Firing Ziv Scully MIT PRIMES May 2, 2 Ziv Scully (MIT PRIMES) Progress on Parallel Chip-Firing May 2, 2 / 8 Motivation Simple rules Obvious patterns which are difficult to prove,
Progress on Parallel Chip-Firing Ziv Scully MIT PRIMES May 2, 2 Ziv Scully (MIT PRIMES) Progress on Parallel Chip-Firing May 2, 2 / 8 Motivation Simple rules Obvious patterns which are difficult to prove,
COMP251: Bipartite graphs
 COMP251: Bipartite graphs Jérôme Waldispühl School of Computer Science McGill University Based on slides fom M. Langer (McGill) & P. Beame (UofW) Recap: Dijkstra s algorithm DIJKSTRA(V, E,w,s) INIT-SINGLE-SOURCE(V,s)
COMP251: Bipartite graphs Jérôme Waldispühl School of Computer Science McGill University Based on slides fom M. Langer (McGill) & P. Beame (UofW) Recap: Dijkstra s algorithm DIJKSTRA(V, E,w,s) INIT-SINGLE-SOURCE(V,s)
FINAL EXAM PRACTICE PROBLEMS CMSC 451 (Spring 2016)
") FINAL EXAM PRACTICE PROBLEMS CMSC 451 (Spring 2016) The final exam will be on Thursday, May 12, from 8:00 10:00 am, at our regular class location (CSI 2117). It will be closed-book and closed-notes, except
FINAL EXAM PRACTICE PROBLEMS CMSC 451 (Spring 2016) The final exam will be on Thursday, May 12, from 8:00 10:00 am, at our regular class location (CSI 2117). It will be closed-book and closed-notes, except
Review Questions, Final Exam
 Review Questions, Final Exam A few general questions 1. What does the Representation Theorem say (in linear programming)? 2. What is the Fundamental Theorem of Linear Programming? 3. What is the main idea
Review Questions, Final Exam A few general questions 1. What does the Representation Theorem say (in linear programming)? 2. What is the Fundamental Theorem of Linear Programming? 3. What is the main idea
CSCE 750 Final Exam Answer Key Wednesday December 7, 2005
 CSCE 750 Final Exam Answer Key Wednesday December 7, 2005 Do all problems. Put your answers on blank paper or in a test booklet. There are 00 points total in the exam. You have 80 minutes. Please note
CSCE 750 Final Exam Answer Key Wednesday December 7, 2005 Do all problems. Put your answers on blank paper or in a test booklet. There are 00 points total in the exam. You have 80 minutes. Please note
A Simple Implementation Technique for Priority Search Queues
 A Simple Implementation Technique for Priority Search Queues RALF HINZE Institute of Information and Computing Sciences Utrecht University Email: ralf@cs.uu.nl Homepage: http://www.cs.uu.nl/~ralf/ April,
A Simple Implementation Technique for Priority Search Queues RALF HINZE Institute of Information and Computing Sciences Utrecht University Email: ralf@cs.uu.nl Homepage: http://www.cs.uu.nl/~ralf/ April,
Fibonacci (Min-)Heap. (I draw dashed lines in place of of circular lists.) 1 / 17
Heap. (I draw dashed lines in place of of circular lists.) 1 / 17") Fibonacci (Min-)Heap A forest of heap-order trees (parent priority child priority). Roots in circular doubly-linked list. Pointer to minimum-priority root. Siblings in circular doubly-linked list; parent
Fibonacci (Min-)Heap A forest of heap-order trees (parent priority child priority). Roots in circular doubly-linked list. Pointer to minimum-priority root. Siblings in circular doubly-linked list; parent
8 Priority Queues. 8 Priority Queues. Prim s Minimum Spanning Tree Algorithm. Dijkstra s Shortest Path Algorithm
 8 Priority Queues 8 Priority Queues A Priority Queue S is a dynamic set data structure that supports the following operations: S. build(x 1,..., x n ): Creates a data-structure that contains just the elements
8 Priority Queues 8 Priority Queues A Priority Queue S is a dynamic set data structure that supports the following operations: S. build(x 1,..., x n ): Creates a data-structure that contains just the elements
Mathematics for Decision Making: An Introduction. Lecture 13
 Mathematics for Decision Making: An Introduction Lecture 13 Matthias Köppe UC Davis, Mathematics February 17, 2009 13 1 Reminder: Flows in networks General structure: Flows in networks In general, consider
Mathematics for Decision Making: An Introduction Lecture 13 Matthias Köppe UC Davis, Mathematics February 17, 2009 13 1 Reminder: Flows in networks General structure: Flows in networks In general, consider
Fiedler s Theorems on Nodal Domains
 Spectral Graph Theory Lecture 7 Fiedler s Theorems on Nodal Domains Daniel A. Spielman September 19, 2018 7.1 Overview In today s lecture we will justify some of the behavior we observed when using eigenvectors
Spectral Graph Theory Lecture 7 Fiedler s Theorems on Nodal Domains Daniel A. Spielman September 19, 2018 7.1 Overview In today s lecture we will justify some of the behavior we observed when using eigenvectors
Exact Algorithms for Dominating Induced Matching Based on Graph Partition
 Exact Algorithms for Dominating Induced Matching Based on Graph Partition Mingyu Xiao School of Computer Science and Engineering University of Electronic Science and Technology of China Chengdu 611731,
Exact Algorithms for Dominating Induced Matching Based on Graph Partition Mingyu Xiao School of Computer Science and Engineering University of Electronic Science and Technology of China Chengdu 611731,
Assignment 5: Solutions
 Comp 21: Algorithms and Data Structures Assignment : Solutions 1. Heaps. (a) First we remove the minimum key 1 (which we know is located at the root of the heap). We then replace it by the key in the position
Comp 21: Algorithms and Data Structures Assignment : Solutions 1. Heaps. (a) First we remove the minimum key 1 (which we know is located at the root of the heap). We then replace it by the key in the position
Breadth First Search, Dijkstra s Algorithm for Shortest Paths
 CS 374: Algorithms & Models of Computation, Spring 2017 Breadth First Search, Dijkstra s Algorithm for Shortest Paths Lecture 17 March 1, 2017 Chandra Chekuri (UIUC) CS374 1 Spring 2017 1 / 42 Part I Breadth
CS 374: Algorithms & Models of Computation, Spring 2017 Breadth First Search, Dijkstra s Algorithm for Shortest Paths Lecture 17 March 1, 2017 Chandra Chekuri (UIUC) CS374 1 Spring 2017 1 / 42 Part I Breadth
Review Questions, Final Exam
 Review Questions, Final Exam A few general questions. What does the Representation Theorem say (in linear programming)? In words, the representation theorem says that any feasible point can be written
Review Questions, Final Exam A few general questions. What does the Representation Theorem say (in linear programming)? In words, the representation theorem says that any feasible point can be written
A Note on the Connection between the Primal-Dual and the A* Algorithm
 A Note on the Connection between the Primal-Dual and the A* Algorithm Xugang Ye, Johns Hopkins University, USA Shih-Ping Han, Johns Hopkins University, USA Anhua Lin, Middle Tennessee State University,
A Note on the Connection between the Primal-Dual and the A* Algorithm Xugang Ye, Johns Hopkins University, USA Shih-Ping Han, Johns Hopkins University, USA Anhua Lin, Middle Tennessee State University,
Running Time. Assumption. All capacities are integers between 1 and C.
 Running Time Assumption. All capacities are integers between and. Invariant. Every flow value f(e) and every residual capacities c f (e) remains an integer throughout the algorithm. Theorem. The algorithm
Running Time Assumption. All capacities are integers between and. Invariant. Every flow value f(e) and every residual capacities c f (e) remains an integer throughout the algorithm. Theorem. The algorithm
The Budget-Constrained Maximum Flow Problem
 9 The Budget-Constrained Maximum Flow Problem In this chapter we consider the following problem which is called the constrained maximum flow problem ( Cmfp) [AO95]: We are given a budget B and we seek
9 The Budget-Constrained Maximum Flow Problem In this chapter we consider the following problem which is called the constrained maximum flow problem ( Cmfp) [AO95]: We are given a budget B and we seek
Chapter 5 Data Structures Algorithm Theory WS 2017/18 Fabian Kuhn
 Chapter 5 Data Structures Algorithm Theory WS 2017/18 Fabian Kuhn Priority Queue / Heap Stores (key,data) pairs (like dictionary) But, different set of operations: Initialize-Heap: creates new empty heap
Chapter 5 Data Structures Algorithm Theory WS 2017/18 Fabian Kuhn Priority Queue / Heap Stores (key,data) pairs (like dictionary) But, different set of operations: Initialize-Heap: creates new empty heap
CS1800: Strong Induction. Professor Kevin Gold
 CS1800: Strong Induction Professor Kevin Gold Mini-Primer/Refresher on Unrelated Topic: Limits This is meant to be a problem about reasoning about quantifiers, with a little practice of other skills, too
CS1800: Strong Induction Professor Kevin Gold Mini-Primer/Refresher on Unrelated Topic: Limits This is meant to be a problem about reasoning about quantifiers, with a little practice of other skills, too
Another way of saying this is that amortized analysis guarantees the average case performance of each operation in the worst case.
 Amortized Analysis: CLRS Chapter 17 Last revised: August 30, 2006 1 In amortized analysis we try to analyze the time required by a sequence of operations. There are many situations in which, even though
Amortized Analysis: CLRS Chapter 17 Last revised: August 30, 2006 1 In amortized analysis we try to analyze the time required by a sequence of operations. There are many situations in which, even though
Algorithm Design and Analysis
 Algorithm Design and Analysis LECTURE 5 Greedy Algorithms Interval Scheduling Interval Partitioning Guest lecturer: Martin Furer Review In a DFS tree of an undirected graph, can there be an edge (u,v)
Algorithm Design and Analysis LECTURE 5 Greedy Algorithms Interval Scheduling Interval Partitioning Guest lecturer: Martin Furer Review In a DFS tree of an undirected graph, can there be an edge (u,v)
CSC 5170: Theory of Computational Complexity Lecture 4 The Chinese University of Hong Kong 1 February 2010
 CSC 5170: Theory of Computational Complexity Lecture 4 The Chinese University of Hong Kong 1 February 2010 Computational complexity studies the amount of resources necessary to perform given computations.
CSC 5170: Theory of Computational Complexity Lecture 4 The Chinese University of Hong Kong 1 February 2010 Computational complexity studies the amount of resources necessary to perform given computations.
Analysis of Algorithms I: All-Pairs Shortest Paths
 Analysis of Algorithms I: All-Pairs Shortest Paths Xi Chen Columbia University The All-Pairs Shortest Paths Problem. Input: A directed weighted graph G = (V, E) with an edge-weight function w : E R. Output:
Analysis of Algorithms I: All-Pairs Shortest Paths Xi Chen Columbia University The All-Pairs Shortest Paths Problem. Input: A directed weighted graph G = (V, E) with an edge-weight function w : E R. Output:
A New Approximation Algorithm for the Asymmetric TSP with Triangle Inequality By Markus Bläser
 A New Approximation Algorithm for the Asymmetric TSP with Triangle Inequality By Markus Bläser Presented By: Chris Standish chriss@cs.tamu.edu 23 November 2005 1 Outline Problem Definition Frieze s Generic
A New Approximation Algorithm for the Asymmetric TSP with Triangle Inequality By Markus Bläser Presented By: Chris Standish chriss@cs.tamu.edu 23 November 2005 1 Outline Problem Definition Frieze s Generic
4 Packing T-joins and T-cuts
 4 Packing T-joins and T-cuts Introduction Graft: A graft consists of a connected graph G = (V, E) with a distinguished subset T V where T is even. T-cut: A T -cut of G is an edge-cut C which separates
4 Packing T-joins and T-cuts Introduction Graft: A graft consists of a connected graph G = (V, E) with a distinguished subset T V where T is even. T-cut: A T -cut of G is an edge-cut C which separates
CS1800: Mathematical Induction. Professor Kevin Gold
 CS1800: Mathematical Induction Professor Kevin Gold Induction: Used to Prove Patterns Just Keep Going For an algorithm, we may want to prove that it just keeps working, no matter how big the input size
CS1800: Mathematical Induction Professor Kevin Gold Induction: Used to Prove Patterns Just Keep Going For an algorithm, we may want to prove that it just keeps working, no matter how big the input size
CMPUT 675: Approximation Algorithms Fall 2014
 CMPUT 675: Approximation Algorithms Fall 204 Lecture 25 (Nov 3 & 5): Group Steiner Tree Lecturer: Zachary Friggstad Scribe: Zachary Friggstad 25. Group Steiner Tree In this problem, we are given a graph
CMPUT 675: Approximation Algorithms Fall 204 Lecture 25 (Nov 3 & 5): Group Steiner Tree Lecturer: Zachary Friggstad Scribe: Zachary Friggstad 25. Group Steiner Tree In this problem, we are given a graph
Decision Mathematics D1 Advanced/Advanced Subsidiary. Tuesday 13 January 2009 Morning Time: 1 hour 30 minutes
 Paper Reference(s) 6689/01 Edexcel GCE Decision Mathematics D1 Advanced/Advanced Subsidiary Tuesday 13 January 2009 Morning Time: 1 hour 30 minutes Materials required for examination Nil Items included
Paper Reference(s) 6689/01 Edexcel GCE Decision Mathematics D1 Advanced/Advanced Subsidiary Tuesday 13 January 2009 Morning Time: 1 hour 30 minutes Materials required for examination Nil Items included
cs/ee/ids 143 Communication Networks
 cs/ee/ids 143 Communication Networks Chapter 5 Routing Text: Walrand & Parakh, 2010 Steven Low CMS, EE, Caltech Warning These notes are not self-contained, probably not understandable, unless you also
cs/ee/ids 143 Communication Networks Chapter 5 Routing Text: Walrand & Parakh, 2010 Steven Low CMS, EE, Caltech Warning These notes are not self-contained, probably not understandable, unless you also
CS 580: Algorithm Design and Analysis
 CS 580: Algorithm Design and Analysis Jeremiah Blocki Purdue University Spring 2018 Reminder: Homework 1 due tonight at 11:59PM! Recap: Greedy Algorithms Interval Scheduling Goal: Maximize number of meeting
CS 580: Algorithm Design and Analysis Jeremiah Blocki Purdue University Spring 2018 Reminder: Homework 1 due tonight at 11:59PM! Recap: Greedy Algorithms Interval Scheduling Goal: Maximize number of meeting
Finite Math - J-term Section Systems of Linear Equations in Two Variables Example 1. Solve the system
 Finite Math - J-term 07 Lecture Notes - //07 Homework Section 4. - 9, 0, 5, 6, 9, 0,, 4, 6, 0, 50, 5, 54, 55, 56, 6, 65 Section 4. - Systems of Linear Equations in Two Variables Example. Solve the system
Finite Math - J-term 07 Lecture Notes - //07 Homework Section 4. - 9, 0, 5, 6, 9, 0,, 4, 6, 0, 50, 5, 54, 55, 56, 6, 65 Section 4. - Systems of Linear Equations in Two Variables Example. Solve the system
CSC 1700 Analysis of Algorithms: Warshall s and Floyd s algorithms
 CSC 1700 Analysis of Algorithms: Warshall s and Floyd s algorithms Professor Henry Carter Fall 2016 Recap Space-time tradeoffs allow for faster algorithms at the cost of space complexity overhead Dynamic
CSC 1700 Analysis of Algorithms: Warshall s and Floyd s algorithms Professor Henry Carter Fall 2016 Recap Space-time tradeoffs allow for faster algorithms at the cost of space complexity overhead Dynamic
Data Mining Prof. Pabitra Mitra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur
 Data Mining Prof. Pabitra Mitra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture 21 K - Nearest Neighbor V In this lecture we discuss; how do we evaluate the
Data Mining Prof. Pabitra Mitra Department of Computer Science & Engineering Indian Institute of Technology, Kharagpur Lecture 21 K - Nearest Neighbor V In this lecture we discuss; how do we evaluate the
Name: Section Registered In:
 Name: Section Registered In: Math 125 Exam 1 Version 1 February 21, 2006 60 points possible 1. (a) (3pts) Define what it means for a linear system to be inconsistent. Solution: A linear system is inconsistent
Name: Section Registered In: Math 125 Exam 1 Version 1 February 21, 2006 60 points possible 1. (a) (3pts) Define what it means for a linear system to be inconsistent. Solution: A linear system is inconsistent
CHAPTER 3 FUNDAMENTALS OF COMPUTATIONAL COMPLEXITY. E. Amaldi Foundations of Operations Research Politecnico di Milano 1
 CHAPTER 3 FUNDAMENTALS OF COMPUTATIONAL COMPLEXITY E. Amaldi Foundations of Operations Research Politecnico di Milano 1 Goal: Evaluate the computational requirements (this course s focus: time) to solve
CHAPTER 3 FUNDAMENTALS OF COMPUTATIONAL COMPLEXITY E. Amaldi Foundations of Operations Research Politecnico di Milano 1 Goal: Evaluate the computational requirements (this course s focus: time) to solve
Discrete Optimization 2010 Lecture 7 Introduction to Integer Programming
 Discrete Optimization 2010 Lecture 7 Introduction to Integer Programming Marc Uetz University of Twente m.uetz@utwente.nl Lecture 8: sheet 1 / 32 Marc Uetz Discrete Optimization Outline 1 Intro: The Matching
Discrete Optimization 2010 Lecture 7 Introduction to Integer Programming Marc Uetz University of Twente m.uetz@utwente.nl Lecture 8: sheet 1 / 32 Marc Uetz Discrete Optimization Outline 1 Intro: The Matching